MICROPROCESADORES cap 1.pdf · 2020-02-04 · Los microprocesadores trabajan con lenguaje de bajo...
54
MICROPROCESADORES FICA-CIERCOM MGS. PAUL ROSERO 1
Transcript of MICROPROCESADORES cap 1.pdf · 2020-02-04 · Los microprocesadores trabajan con lenguaje de bajo...
MICROPROCESADORESF I C A - C I E RCOM
MGS. PAUL ROSERO 1
INTRODUCCIÓN
MGS. PAUL ROSERO 2
Con el avance tecnológico, los procesos de producción industrial
han sufrido grandes cambios donde nuevos productos han realizado nuevos métodos de fabricación, solución de fallas,
sistemas, etc.
En la actualidad la automatización es un área en permanente
contacto con nostros, por tal razón debemos estar preparados y
conocer dichos sistemas
INTRODUCCIÓN
Primera parte de larevolución industrial lasmáquinas reemplazaronmúsculos, mientras quela segunda, la actual, losmicroprocesadores y susaplicaciones intentanreeemplazar al cerebro.
MGS. PAUL ROSERO 3

SISTEMAELECTRÓNICOUn sistema electrónico es unconjunto de circuitos queinteractúan entre sí para obtener unresultado. Una forma de entenderlos sistemas electrónicos consisteen dividirlos en las siguientespartes:
MGS. PAUL ROSERO 4
SISTEMA ELECTRÓNICO1. Entradas o Inputs – Sensores (o transductores) electrónicos o mecánicosque toman las señales (en forma de temperatura, presión, etc.) del mundofísico y las convierten en señales de corriente o voltaje. Ejemplo: El termopar,la foto resistencia para medir la intensidad de la luz, etc.
2. Circuitos de procesamiento de señales (Unidad Central de Procesos) –Consisten en piezas electrónicas conectadas juntas para manipular,interpretar y transformar las señales de voltaje y corriente provenientes delos transductores.
3. Salidas o Outputs – Actuadores u otros dispositivos (tambiéntransductores) que convierten las señales de corriente o voltaje en señalesfísicamente útiles. Por ejemplo: un display que nos registre la temperatura,un foco o sistema de luces que se encienda automáticamente cuando esteobscureciendo.
MGS. PAUL ROSERO 5
SISTEMA ELECTRÓNICOExisten 2 soluciones para implementar un circuito digital que resuelvaun problema:
•LÓGICA CABLEADA : Diseñados para una solución, muy rígidos.
•LÓGICA PROGRAMADA: Máquinas potentes y flexibles capaces derealizar varias funciones sin la necesidad de muchos cambios. Trabajade forma secuencial progresivamente sobre las operaciones necesariasen base a un programa.
MGS. PAUL ROSERO 6

LÓGICA CABLEADA VS LÓGICAPROGRAMADA
MGS. PAUL ROSERO 7

MICROPROCESADOREl microprocesador es un circuito digital que puede programarse con una serie de instrucciones, para realizar funciones específicas con los datos. Cuando un microprocesador se conecta a un dispositivo de memoria y se provee de dispositivos de entrada y salida, pasa a ser un sistema microprocesado.
MGS. PAUL ROSERO 8
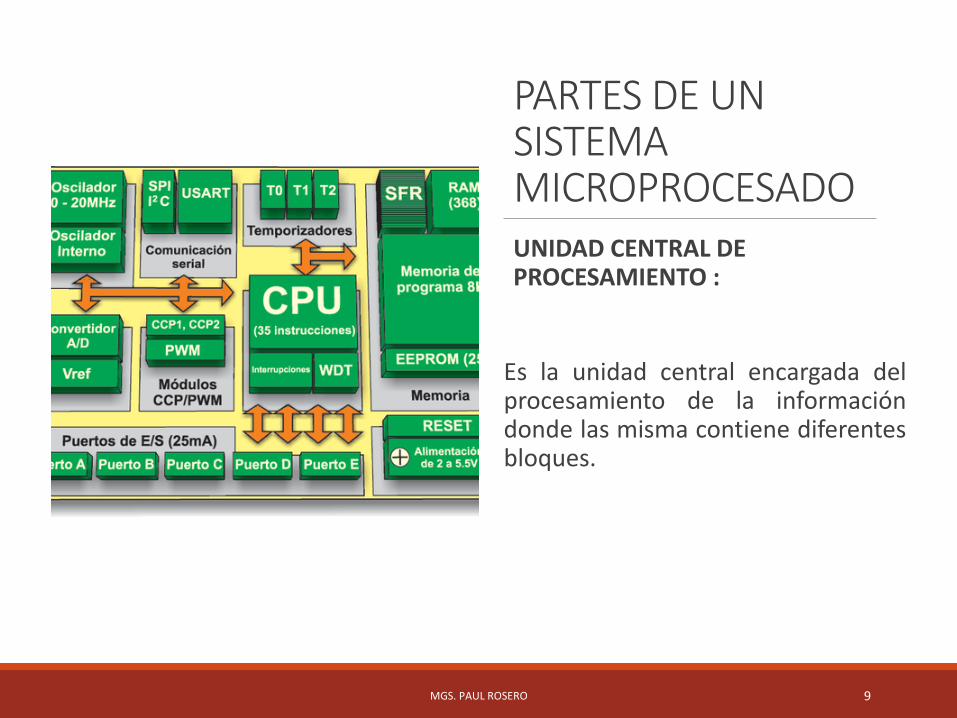
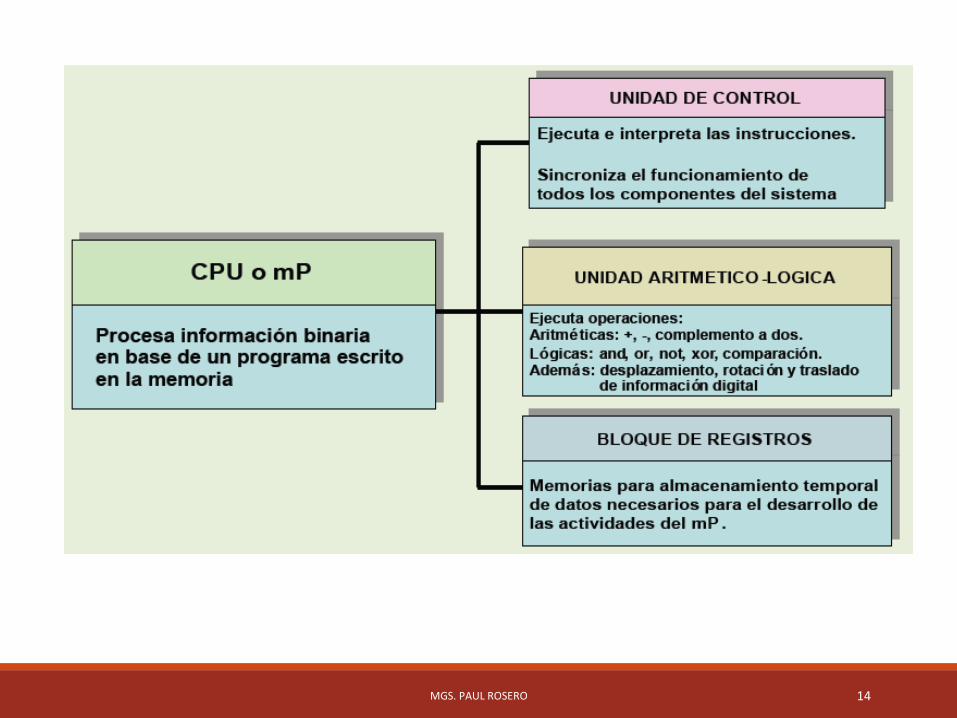
PARTES DE UN SISTEMA MICROPROCESADOUNIDAD CENTRAL DE PROCESAMIENTO :
Es la unidad central encargada delprocesamiento de la informacióndonde las misma contiene diferentesbloques.
MGS. PAUL ROSERO 9
Unidad de Control
MGS. PAUL ROSERO 10
Ejecuta e interpreta las funciones.
Sicroniza el funcionamiento de
todos los componentes del
sistema.
/
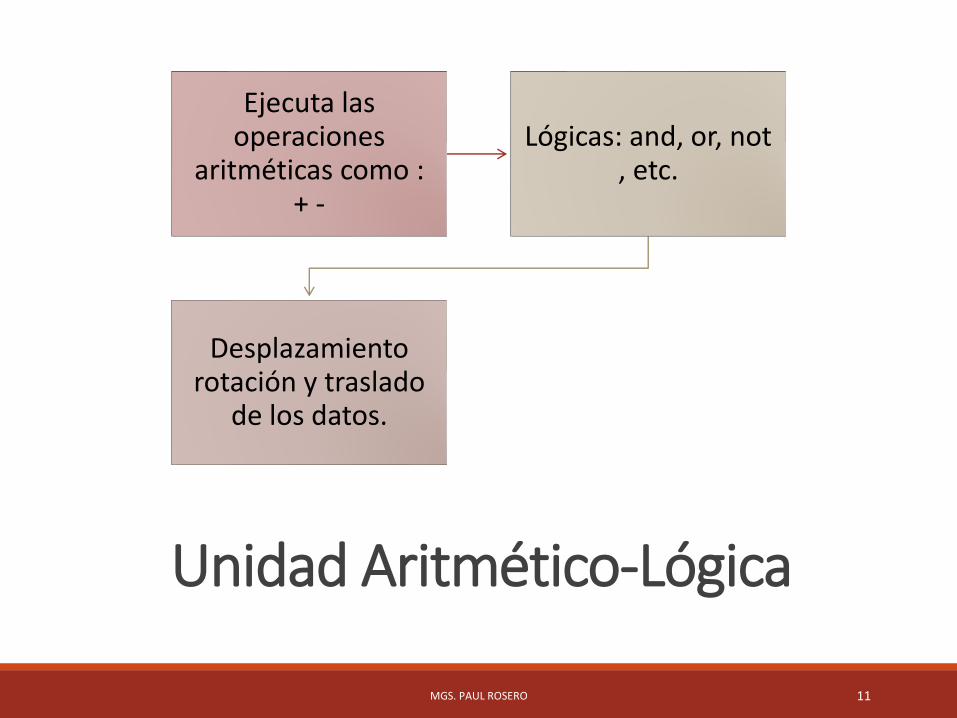
Unidad Aritmético-Lógica
MGS. PAUL ROSERO 11
Ejecuta las operaciones
aritméticas como : + -
Lógicas: and, or, not , etc.
Desplazamiento rotación y traslado
de los datos.

Bloquede RegistrosMEMORIAS PARA EL ALMACENAMIENTO TEMPORAL DE LOS DATOS RECIBIDOS.
MGS. PAUL ROSERO 12
REGISTROS
Son un espacio de memoria muy reducido pero necesario para cualquiermicroprocesador, de aquí se toman los datos para varias operaciones que deberealizar el resto de los circuitos del procesador. Los registros sirven paraalmacenar los resultados de la ejecución de instrucciones, cargar datos desdela memoria externa o almacenarlos en ella. Además de la configuración de lospuertos Entrada-Salida.
MGS. PAUL ROSERO 13
MGS. PAUL ROSERO 14
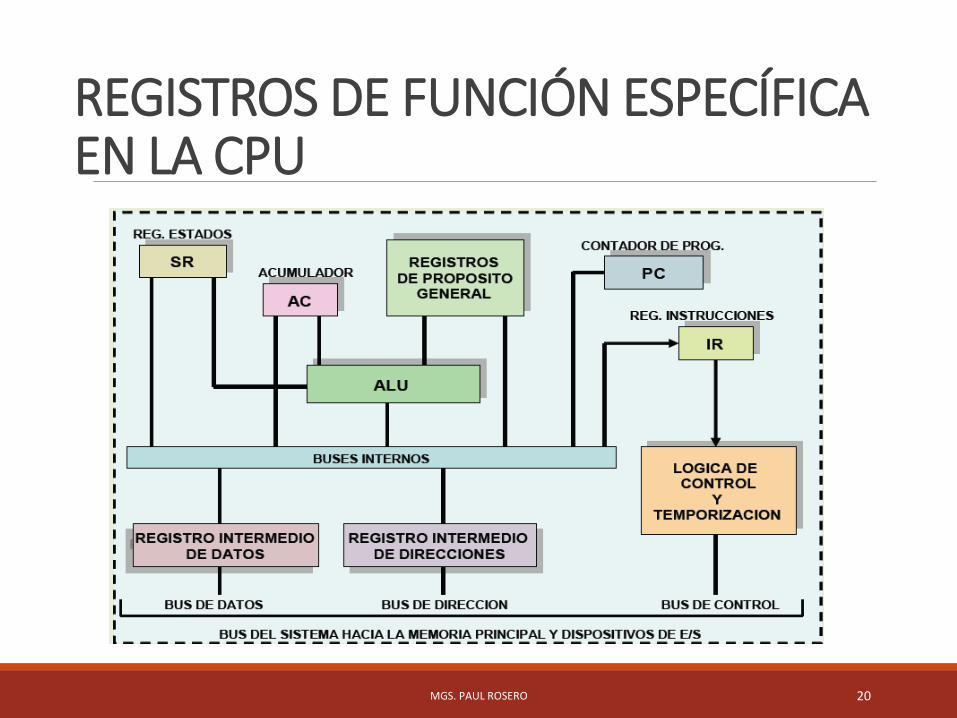
REGISTROS DE FUNCIÓN ESPECÍFICAEN LA CPU
Registro Contador de Programa (PC): Es el que indica al microprocesador ladirección de memoria donde se esta ejecutando el programa. Cada vez que elmicrocontrolador ejecuta una línea de programa este registroautómaticamente se incrementa.
MGS. PAUL ROSERO 15
REGISTROS DE FUNCIÓN ESPECÍFICAEN LA CPU
Registro de Instrucciones (IR): Cada vez que el microprocesador capta unainstrucción, esta se almacena en el registro IR para proceder a suinterpretación, busca en la ROM del programa el conjunto demicroinstrucciones necesarias para la ejecución.
MGS. PAUL ROSERO 16
REGISTROS DE FUNCIÓN ESPECÍFICAEN LA CPU
Acumulador (Ac, W): Dentro de la unidad Aritmética-Lógica se encuentra elprimer operando y el resultado de la misma luego de haberla ejecutado.
MGS. PAUL ROSERO 17
REGISTROS DE FUNCIÓN ESPECÍFICAEN LA CPU
Registro de estado ( SR): suministra a través de sus bits ( banderas),información realtiva a la ejecución de ciertas instrucciones como signo ,resultado negativo, etc.
Registro de 8 bits, el # binario es de 7 bits, el octavo bit es la bandera delsigno.
MGS. PAUL ROSERO 18
REGISTROS DE FUNCIÓN ESPECÍFICAEN LA CPU
Propósito General: Son utilizados para almecenar direcciones de memoria,datos, resultados, es un aspecto muy importante que poseen losmicroprocesadores en su programación.
MGS. PAUL ROSERO 19
REGISTROS DE FUNCIÓN ESPECÍFICAEN LA CPU
MGS. PAUL ROSERO 20
BLOQUE DE MEMORIA
▪Las memorias se emplean para dos funciones básicas:
▪Almacenar las instrucciones internas (COP). Código de Operación.
▪Almacenar datos.
MGS. PAUL ROSERO 21
MEMORIAS
MGS. PAUL ROSERO 22
MEMORIAS
•MEMORIAS VOLÁTILES: Necesita energía para mantener los datos.
•MEMORIAS NO VOLÁTILES: No necesitan energía para mantener datos.
MGS. PAUL ROSERO 23
MEMORIAS
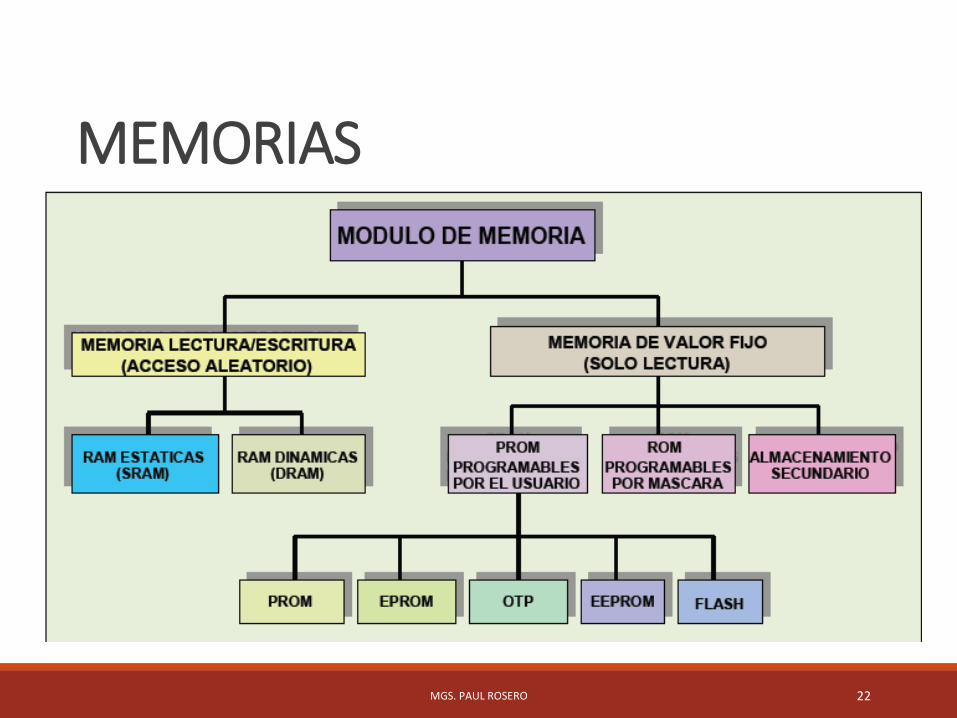
▪ROM (Read Only Memory): Destinada únicamente para los datos que seránalmacenados en forma permanente.
▪RAM (Random Access Memory): Escritura de programas.
MGS. PAUL ROSERO 24
MEMORIAS RAM
SRAM: Memoria Estática de Acceso Aleatorio es un tipo de memoria basadaen semiconductores.
▪Usa flip-flops
▪Rápida
▪Consume mucha energía.
▪8 bits.
MGS. PAUL ROSERO 25
MEMORIAS RAM
DRAM: (Dynamic Random Access Memory) es un tipo de memoria dinámica deacceso aleatorio que se usa principalmente en los módulos de memoria RAM.
•Usa capacitores.
•Consume menos energía
•Celdas de 1 bit.
MGS. PAUL ROSERO 26
MEMORIAS ROM
•ROM con máscara: memoria no volátil de sólo lectura que se graba durante lasfabricación del chip.
•OTP (One Time Programmable): Se programa una vez por el usuario, es paracorto ciclo del diseño del producto.
•EPROM (Erase Programable Read Only): Pueden grabarse y borrarse muchasveces. Poseen una ventana en su superrficie por la que se somete a rayosultravioleta para ser borrada.
•EEPROM (Electrical Erasable Programmable Read Only Memory): Tanto comola programación y el borrado se realizan eléctricamente desde el propiograbador y bajo un crontol programado de un PC.
MGS. PAUL ROSERO 27
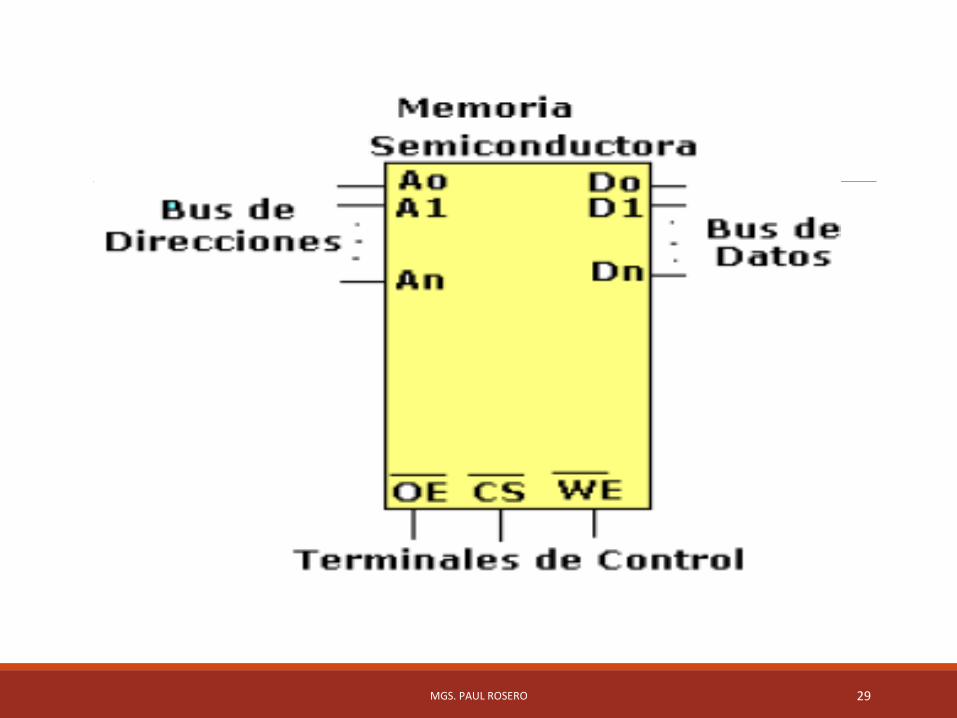
MEMORIAS➢BUS DE DATOS: Entran y salen los datos de la memoria.
➢BUS DE DIRECCIONES: Direccionamiento de direcciones.
➢OE (output Enable): Terminal de lectura.
➢WE( Write Enable): Terminal de escritura.
➢CS (Chip Select): Terminal que permite la activacion o desactivación.
MGS. PAUL ROSERO 28
MGS. PAUL ROSERO 29
Módulo de E/SLos módulos de entrada y salida tienen la misión de proteger y aislar laetapa de control que esta conformada principalmente por elmicroprocesador, de todos los elementos que se encuentran fuera de launidad central de proceso ya sean sensores o actuadores.
Es el destinado a asegurar la transferencia de información, presentadaen binario, entre el sistema y diversos peridéricos conectados a este(teclados, pulsadores, leds, etc)
MGS. PAUL ROSERO 30
PERIFERICOS LENTOSSu estado cambia un vez por segundo y requieren varios milisegundospara estabilizar en su nuevo estado.
▪Displays
▪Relés
▪Contactos
MGS. PAUL ROSERO 31
PERIFERICOS DE VELOCIDADMEDIA▪Son aquellos que trasnfieren datos desde 1bps a 10000 bps.
▪Teclado
▪CAD
▪Impresoras normales.
MGS. PAUL ROSERO 32
PERIFERICOS DE ALTA VELOCIDAD➢Son aquellos que transfieren datos a velocidades superiores a 10000 bps.
➢Discos magnéticos.
➢Impresoras láser.
➢Pantallas de video.
MGS. PAUL ROSERO 33
BUSES▪Los tres componentes principales en un sistema microprocesado son:CPU, Bloque de memori y módulo de E/S , estan conectados por cableseléctricos denominados buses del sistema.
▪Un bus representa una reunión de líneas las cuales realizan latransferencia uni y biderecional de la información.
▪El número de líneas del bus es en general, igual con la longitud de lapalabra de datos del microprocesador.
▪Transfiere información binaria.
MGS. PAUL ROSERO 34
BUS DE DIRECCIONESFormado por líneas unidirecionales. Es utilizado para la transferencia deinformación necesaria para la selección de una posición de memoria.
MGS. PAUL ROSERO 35
BUS DE CONTROL▪Esta formado por líneas, en general, undireccionales.
▪En este bus cada línea tiene su significado y denominación distinta.
▪CLK IN: Entrada de reloj.
▪CLK OUT: salida del reloj.
▪RESET IN.
▪INTERRUPT.
▪HOLD: Suspensión.
MGS. PAUL ROSERO 36
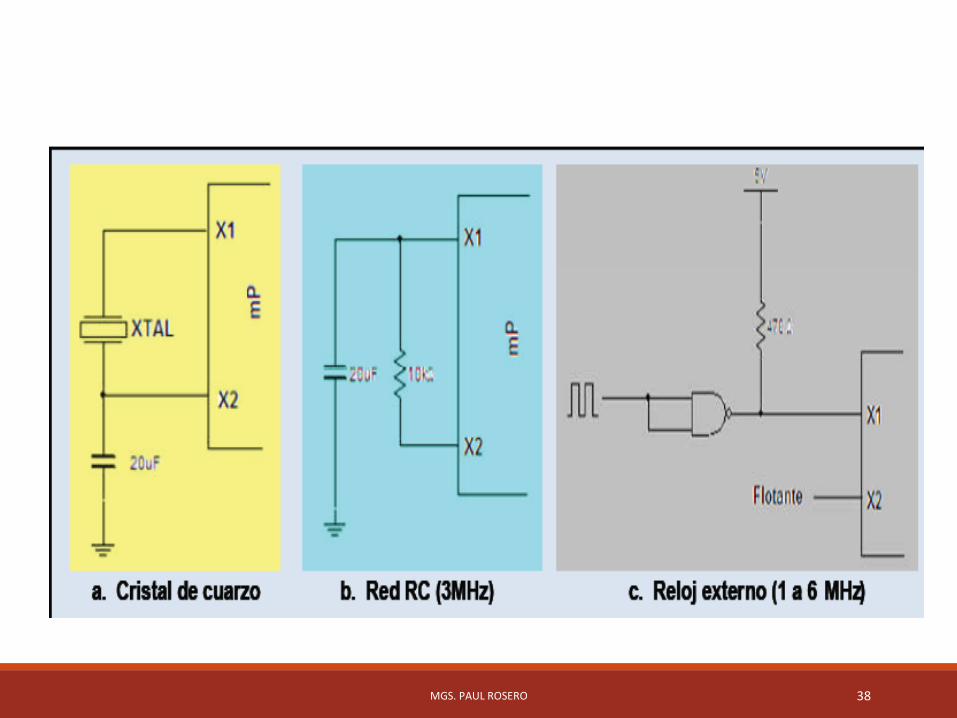
CIRCUITO DE RELOJLo microcontroladores necesitan de un generador de pulsos de relojpara controlar el contador de programa y sincronizar sus funcionesinternas. En la mayoría el reloj viene incorporado pudiéndolos controlarexternamente su frecuencia mediante un cristal de cuarzo, una red RCconectados a los pines respectivos.
MGS. PAUL ROSERO 37
MGS. PAUL ROSERO 38

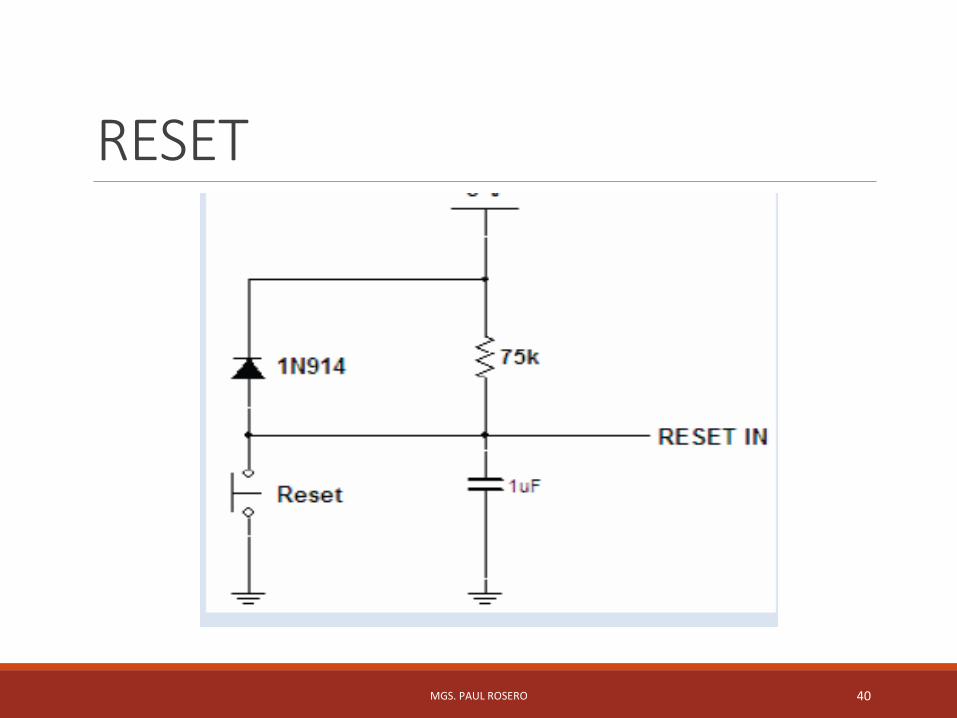
RESETEl microprocesador puede ser fácilmente conectado o desconectadopor hardware manejando el reset.
Cuando recibe un bajo (0) el microprocesador entra en estado reset, elcontador de programa se carga con cero y se borran los flip-flops.
MGS. PAUL ROSERO 39
RESET
MGS. PAUL ROSERO 40
MGS. PAUL ROSERO 41
SOFTWARE PROGRAMACIÓN DE UN SISTEMA CON MICROPROCESADORES.
INTRODUCCIÓNLos sistemas contribuidos sobre la base de los microprocesadores,requieren para una puesta en marcha el desarrollo del software, esdecir, el desarrollo de programas que una vez constituidos, sonalmacenados en las memorias permanentes (EEPROM, FLASH) delsistema.
Este software es buscado por el microprocesador para desarrollarfunciones y tareas deseadas.
PASOS DE EJECUCIÓN1. Construir la dirección de la posición de memoria donde se
encuentra la instrucción y situara en el bus de direcciones. Estafunción la realiza el contador de programa.
2. Leer la instrucción por medio de una orden de lectura enviada através del bus de control. Esta información se almacena en elregistro de instrucciones.
3. Decodificar la instrucción para determinar en la ROM delmicroprograma la secuencia de microinstrucciones necesarias parallevarlas a cabo.
PASOS DE EJECUCIÓN4. Leer, si la instrucción así lo exige, cualquier dato almacendao en una posiciónde memoria otraerlo desde un puerto de entreda.
5. Ejecutar las operaciones especificadas por la instrucción. Esta función larealiza la ALU.
6. Almacenar, si la instrución así lo exige, los resultados en una determinadaposición de memoria o llevarlos al puerto de salida.
PARA RECORDARLos microprocesadores trabajan con lenguaje de bajo nivel, es decir, trabajan en lenguaje máquina. Cada microprocesador tiene su propriolenguaje máquina que determina cada fabricante.
Esta información es almacenda como bytes, es decir, unos y ceros.
Hay que recalcar que nosotros usamos lenguaje de alto nivel.

ARQUITECTURAS DE LOS SITEMASMICROPROCESADOSLA ARQUITECTURA DE LOS SISTEMAS DIGITALES PROGRAMABLES PUEDEN SER: VON NEUMANN O HARDVARD
ARQUITECTURAVON NEUMANN
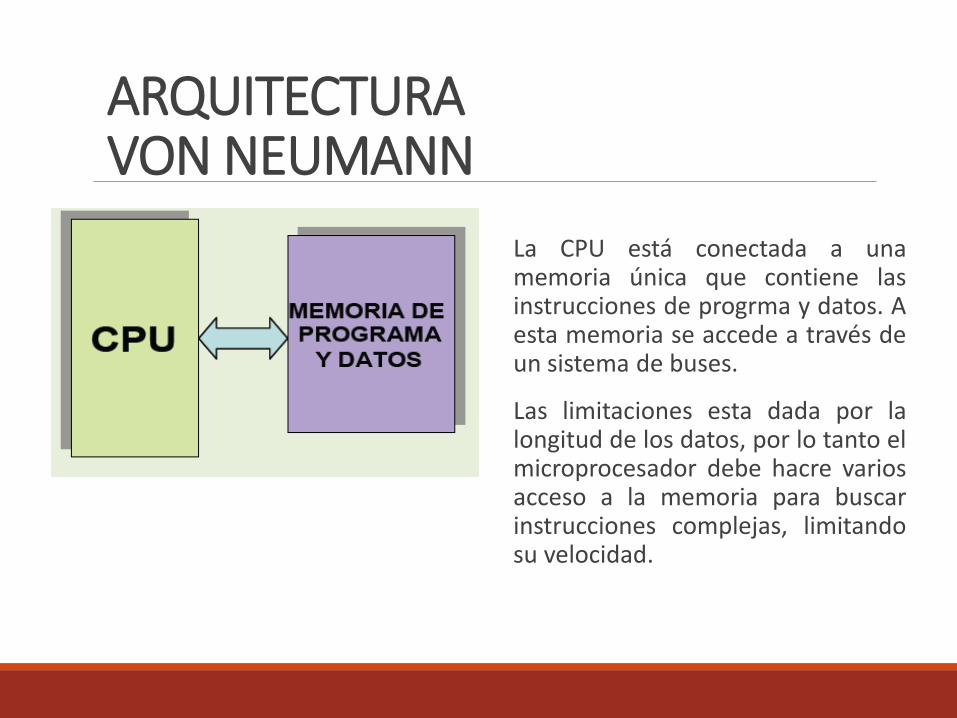
La CPU está conectada a unamemoria única que contiene lasinstrucciones de progrma y datos. Aesta memoria se accede a través deun sistema de buses.
Las limitaciones esta dada por lalongitud de los datos, por lo tanto elmicroprocesador debe hacre variosacceso a la memoria para buscarinstrucciones complejas, limitandosu velocidad.
ARQUITECTURAHARDVARD
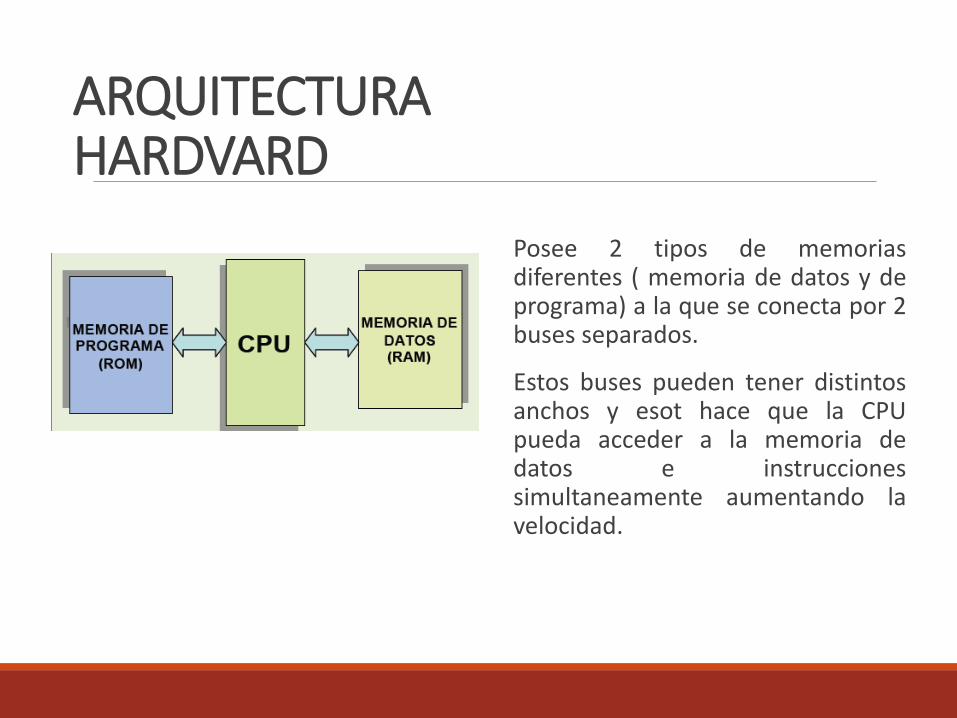
Posee 2 tipos de memoriasdiferentes ( memoria de datos y deprograma) a la que se conecta por 2buses separados.
Estos buses pueden tener distintosanchos y esot hace que la CPUpueda acceder a la memoria dedatos e instruccionessimultaneamente aumentando lavelocidad.
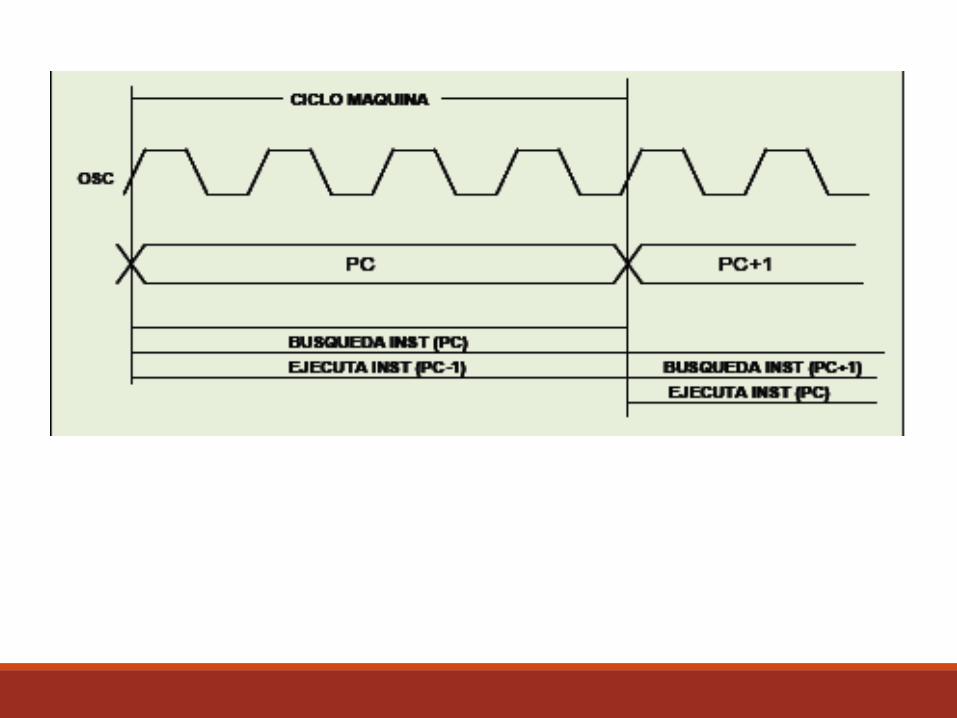
PROCESADOR SEGMENTADO O
PIPELINE
Es un procesador que realiza simultáneamente la ejecución y la búsqueda del código siguiente, de esta menera se puede ejecutar una instrucción en un solo ciclo máquina.
PROCESADOR SEGÚN EL NÚMERO DE INSTRUCCIONES.
CISC ( Complex Instruction Set Computer). Son procesadores con un juego de instrucciones complejo. Su repertorio de instrucciones es
elevado y algunas de ellas son muy sofisticadas.
RISC ( Reduced Instruction Set Computer). Las intrucciones son muy simples y suelen
ejecutarse en un solo ciclo máquina. Los procesadores RISC suelen tener un estructura
Pipeline.
SISC ( Specific Instruction Set Computer). Estos procesadores poseen un juego de instrucciones
específico para cada aplicación. Aplicaciones muy concretas.
ARQUITECTURADEL PROCESADORSEGÚN ELFORMATO DE LASINSTRUCCIONES..
Arquitectura Ortogonal y TRADICIONAL.
La diferencias entre estas es que la arquitectura
Ortogonal puede utilizar cualquier elemento de la
arquitectura como fuente o destino.

ARQUITECTURA DEL PROCESADOR SEGÚNEL FORMATO DE LAS INSTRUCCIONES
En la Arquitectura tradicional todas las
operaciones se realizan sobre el
acumulador.
En la arquitectura Ortogonal la salida de la ALU va al registro
de trabajo y tambien a la memoria de datos así el resultado puede
guardarse en cualquier destino.
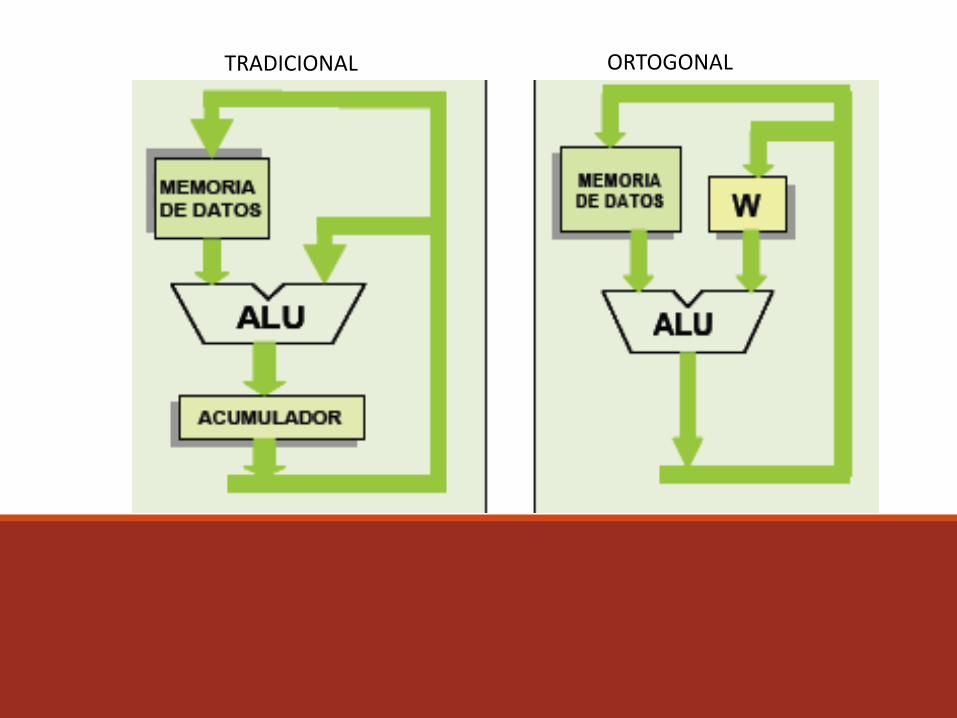
TRADICIONAL ORTOGONAL