Modelado, Simulación y control de sistemas con muestreo no ...
12
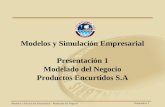
REVISTA Universidad EAFIT No. 125 | enero.febrero.marzo | 2002 CARLOS MARIO VÉLEZ S`NCHEZ. Departamento de Ciencias BÆsicas. Universidad EAFIT. Doctor en Ciencias Físicas, Univer- sidad PolitØcnica de Valencia. Email: [email protected] Carlos Mario VØlez Modelado, Simulación y control de sistemas con muestreo no convencional RESUMEN En el presente trabajo se presenta una visión general de los principales desarrollos realizados en el anÆlisis y diseæo de un tipo especial de sistemas de control con muestreo no convencional (los sistemas multifrecuencia), desde sus inicios en 1955. En el modelado, diseæo y simulación se toman como ejemplo algunos resultados obtenidos por los autores. Los diferentes conceptos se ilustran con ejemplos concretos. INTRODUCCIÓN Un sistema multifrecuencia es un sistema digital en el cual dos o mÆs variables son actualizadas a frecuencias distintas. Las variables pueden pertenecer a un mismo lazo de control (figura 2) o a diferentes lazos, como en el caso de sistemas multivariables (figura 1). El control multifrecuencia presenta ciertas propiedades que lo hacen interesante al momento de diseæar reguladores digitales de alto desempeæo, que tengan en cuenta las distintas dinÆmicas de los elementos del sistema. AdemÆs, como lo han demostrado varios autores, la introducción intencional de esquemas multifrecuencia puede mejorar el comportamiento de un sistema, en comparación con la aplicación de esquemas monofrecuencia. FIGURA 1 Sistema multifrecuencia MIMO (Multiple Inputs Multiple Outputs)
Transcript of Modelado, Simulación y control de sistemas con muestreo no ...

REVI
STA
Unive
rsid
ad E
AFI
T N
o. 1
25 |
ene
ro.fe
bre
ro.m
arz
o |
200
2
9
CARLOS MARIO VÉLEZ SÁNCHEZ. Departamento de CienciasBásicas. Universidad EAFIT. Doctor en Ciencias Físicas, Univer-sidad Politécnica de Valencia.Email: [email protected]
Carlos Mario Vélez
Modelado,Simulación y control de sistemas conmuestreo no convencional
RESUMEN
En el presente trabajo se presenta una visión general de losprincipales desarrollos realizados en el análisis y diseño de untipo especial de sistemas de control con muestreo noconvencional (los sistemas multifrecuencia), desde sus iniciosen 1955. En el modelado, diseño y simulación se toman comoejemplo algunos resultados obtenidos por los autores. Losdiferentes conceptos se ilustran con ejemplos concretos.
INTRODUCCIÓN
Un sistema multifrecuencia es un sistema digital en el cual doso más variables son actualizadas a frecuencias distintas. Lasvariables pueden pertenecer a un mismo lazo de control(figura 2) o a diferentes lazos, como en el caso de sistemasmultivariables (figura 1).
El control multifrecuencia presenta ciertas propiedades que lohacen interesante al momento de diseñar reguladores digitalesde alto desempeño, que tengan en cuenta las distintasdinámicas de los elementos del sistema. Además, como lo handemostrado varios autores, la introducción intencional deesquemas multifrecuencia puede mejorar el comportamiento deun sistema, en comparación con la aplicación de esquemasmonofrecuencia.
FIGURA 1Sistema multifrecuencia MIMO
(Multiple Inputs Multiple Outputs)

10
Un sistema multifrecuencia es un sistema digitalen el cual dos o más variables son actualizadasa frecuencias distintas. Las variables puedenpertenecer a un mismo lazo de control o adiferentes lazos, como en el caso de sistemasmultivariables.
Aplicaciones del control multifrecuencia:
� En el control digital de un proceso con una frecuencia decontrol diferente a la de medida. Por ejemplo, en sistemas decontrol de vuelo, donde el computador de control hace unmuestreo a una frecuencia diferente a la del subsistema radaro en sistemas robotizados, donde una videocámara (sensor)se usa para detectar movimientos a una frecuencia menorque la requerida para el control (las cámaras de altafrecuencia son muy costosas).
� En sistemas multiprocesador, ya que mejora la respuestadel sistema. Es posible distribuir las tareas de control envarios procesadores con características diferentes. Si losprocesadores no son disparados por un pulso de reloj comúny sus cálculos, muestreo y retención no están sincronizados,se tiene el caso de controladores multifrecuencia asíncronoso irregulares.
� En sistemas multivariables, donde es ventajoso disponer dediferentes frecuencias de muestreo en diferentes lazos (elancho de banda de sensores y actuadores es muy diferente)para reducir la carga de cálculo del computador y mejorar laprecisión.
� En sistemas donde se desee mejorar las especificacionestemporales o frecuenciales de la salida de un proceso(sobreimpulso, tiempo de establecimiento, oscilacionesocultas, márgenes de fase y ganancia), la controlabilidad o laobservabilidad.
� En el diseño, ya que se tiene mayor libertad para laimplementación de reguladores como: asignación de polos yceros, mapeo del modelo, estabilización simultánea,estabilización con márgenes de ganancia arbitrariamentegrandes, control descentralizado.
� En implementaciones de bajo costo, ya que requiere decomputadores menos rápidos.
Es interesante resaltar que el control multifrecuencia ha sidoutilizado en diversas áreas y sistemas como: robótica, control dediscos duros, aviónica, columnas de destilación, reactores,procesadores, detección de fallos, industria del poliéster,submarinos, sistemas eléctricos, gas, PVC, sistemasneumáticos y motores. En diversas revistas y memorias deeventos se encuentran más de ochenta artículos con referenciaclara y directa a la aplicación del control multifrecuencia.
A pesar de las numerosas aplicaciones que ha tenido en losúltimos años el control multifrecuencia, sus reales ventajassobre los sistemas monofrecuencia son un tema actual dediscusión. En particular, debido a las diferentes escalas detiempo es delicado definir apropiadamente normas para lacomparación del comportamiento. Muchos autores han afirmadoque el control multifrecuencia puede tener problemas desensibilidad y robustez (Moore, 1993); además, la señal decontrol puede tomar valores muy altos y con cambios bruscosque pueden llevar a problemas con oscilaciones ocultas y a unmal condicionamiento del modelo multifrecuencia.
No obstante las dificultades encontradas, cada día se vansuperando los obstáculos y se proponen estrategias másacordes con los problemas reales de control. Por ejemplo,en (Ito, 2000; Paraskevopoulus, 1994) se muestran las clarasventajas de un regulador multifrecuencia sobre la versiónmonofrecuencia.
FIGURA 2Sistema multifrecuencia SISO(Single Input Single Output)
El concepto de multifrecuencia ha sido utilizado ampliamenteen el área del procesamiento digital de señales (DSP). Allíhay un extenso material representado en artículos, libros yherramientas (por ejemplo, para MATLABÓ). Una simpleconsulta sobre multifrecuencia (Multirate) por Internet o en basesde datos especializadas, arroja una gran cantidad de fuentes deinformación en el área del procesamiento digital, muy superioral área del control. El presente trabajo no aborda en ningúnsentido este tipo de problemáticas.

REVI
STA
Unive
rsid
ad E
AFI
T N
o. 1
25 |
ene
ro.fe
bre
ro.m
arz
o |
200
2
11
Es interesante resaltar que el control multi-frecuencia ha sido utilizado en diversas áreasy sistemas como: robótica, control de discosduros, aviónica, columnas de destilación,reactores, procesadores, detección de fallos,industria del poliéster, submarinos, sistemaseléctricos, gas, PVC, sistemas neumáticos ymotores.
1. ASPECTOS HISTÓRICOS DEL MODELADO DESISTEMA MULTIFRECUENCIA
Desde sus inicios en 1955 se han propuesto y utilizadodiversas técnicas para el análisis y diseño de sistemasmultifrecuencia, esencialmente para el estudio del compor-tamiento intermuestreo o debido a la naturaleza multi-dinámicade los sistemas dinámicos en consideración (Glasson, 1988;Araki, 1993). En los primeros trabajos el sistema multifre-cuencia se descomponía en sistemas monofrecuencia y seaplicaban técnicas clásicas de análisis y diseño (básicamentela transformada Z modificada). La primera técnica de análisis desistemas multifrecuencia se conoce como descomposiciónfrecuencial y fue desarrollada por (Sklansky y Ragazzini, 1955)y complementada por Coffey y Williams en 1965. Una filosofíaalternativa se conoce como descomposición de interruptores yfue presentada por (Kranc, 1957). (Jury, 1967) demostró quelos dos enfoques anteriores son equivalentes. Otros autores quesiguieron esta línea fueron (Whitbeck y Didaleusky, 1980),quienes al introducir vectores en el modelado (descomposiciónvectorial de interruptores) facilitaron la manipulación de losdiagramas de bloques, además de permitir el análisis desistemas con muestreo irregular o asíncrono. Todos los métodosanteriores son aplicados en el dominio de la frecuencia y son muyembarazosos por sus extremas complejidades matemáticas;además, no relacionan ninguna función de transferencia alsistema. Más tarde, (Thompson, 1986) presenta una técnica,conocida como método de los operadores de Kranc, que soslayaestos inconvenientes al permitir, mediante la introducción de losllamados operadores de Kranc, el estudio sistemático de ladescomposición de conexiones y su adecuada implementaciónpor computador. El método de los operadores de Kranc es unmétodo matricial basado en la ecuación de estado del sistemaSISO.
El enfoque temporal fue introducido por (Kalman y Bertram,1959), pero se desarrolló poco hasta los trabajos de (Barry,
1975), (Amit, 1980) y (Broussard y Glasson, 1980), en loscuales se aplicó el muestreo multifrecuencia al diseño decontroladores óptimos. Barry describe el diseño de un reguladormultifrecuencia y muestra que su desempeño es superior a unregulador monofrecuencia con la misma frecuencia base.Algunos problemas de los enfoques anteriores se simplifican conel método de sustituciones progresivas de (Araki y Yamamoto,1986), desarrollado para sistemas MIMO. El modelo es de grandimensión, con vectores ampliados de estado, entradas ysalidas. Este modelo fue restringido a un sistema con igualnúmero de entradas y salidas y a una configuración deretroalimentación desacoplada utilizando compensaciónestática. (Godbout, Jordan y Apostolakis, 1990) desarrollaron unmodelo para un sistema de control en lazo cerrado queincorpora muestreo multifrecuencia con compensacióndinámica, pero su dimensión es aún mayor que la del modelode Araki-Yamamoto. Más tarde, (Apostolakis y Jordan, 1991)redujeron las dimensiones de dicho modelo de una manerainformal.
Un hecho común en la mayoría de estos enfoques es larepresentación por medio de una ecuación de estado invariableen el tiempo (LTI) y ampliada del sistema multifrecuencia (liftedsystem). La ecuación está dada a un período global To, igual almínimo común múltiplo de todos los períodos de muestreoexistentes en el sistema y contiene más entradas y salidas queel sistema original. Varios autores han mostrado que estarepresentación conserva muchas de las propiedades del sistemamultifrecuencia original (alcanzabilidad, controlabilidad,observabilidad, estabilidad, etc).
(Meyer, 1990) demostró que un sistema multifrecuencia es uncaso especial de un tipo de operador, el cual él introduce y llama"shift-varying operator". Además, para ese operador existe unoperador equivalente "shift-invariant", el cual conserva todaslas propiedades algebraicas y analíticas del sistemamultifrecuencia original (en su artículo, se analiza el casoparticular de la estabilidad BIBO). Desde la perspectiva de estenuevo operador, todas las representaciones de sistemasmultifrecuencia son equivalentes e incluso Meyer obtiene unageneralización del operador de Kranc a sistemas MIMO. Elmismo (Meyer, 1988) propone un método CAD para el diseñode reguladores multifrecuencia, con el cual pretende hacer máseficiente y natural dicho proceso. El método tiene como base larepresentación invariable en el tiempo de los sistemasmultifrecuencia. Como ejemplo, aplica la Q-parametrización dereguladores.

12
El operador Kranc MIMO presenta algunascaracterísticas interesantes, las cualeshan sido analizadas por (Vélez, 1999;Vélez, 2001). En su trabajo, Vélez obtieneel modelo ZOH Kranc MIMO a partir desustituciones progresivas y lo usa comobase para el diseño de reguladoresmultifrecuencia.
El modelado de sistemas multifrecuenciaes posible por medio de sistemasperiódicos, con vectores más reducidosque para el caso de modelos linealesinvariables. La principal desventaja deestos modelos es la extrema complejidaden el diseño de reguladores. Autorescomo Colaneri-Scattolini-Schiavoni yGlasson han hecho aportes importantes eneste sentido.
Alrededor de los años de 1986 a 1989se comienza a ver un auge en la teoría yaplicación del control multifrecuencia,debido a la aparición de modelos másfáciles de aplicar computacionalmente yprocesadores más rápidos. Se concentrael estudio en las propiedades y carac-terísticas de los métodos de modeladopropuestos y en el diseño directo dereguladores.
Un caso de interés en los últimos años esel caso del muestreo multifrecuenciairregular. Aunque varios autores hantratado el tema, es un campo pocoexplorado. Uno de los trabajos másimportantes en el área lo constituye elrealizado por (Salt, 1992). En el presentetrabajo se expone una generalización dedicho modelo.
El enfoque temporal en variables deestado es el método preferido para elmodelado de sistemas multifrecuencia,debido a la reducción de este tipo desistemas a representaciones invariablesen el tiempo que amplían el número deentradas y salidas del sistema (sistemas
MIMO). Es importante indicar que no esposible obtener una representaciónexterna para los sistemas multifre-cuencia, exceptuando el caso deesquemas MRIC (Multirate Input Control;la acción de control se aplica rápida-mente, mientras que las mediciones sehacen de manera lenta). Los esquemasde muestreo MRIC y MROC (MultirateOutput Control; contrario al MRIC) parasistemas MIMO son muy estudiados en labibliografía.
2. MÉTODOS DE CONTROLMULTIFRECUENCIA
A continuación se hace una clasifi-cación por tema de los principalesmétodos encontrados en la bibliografía yque nos pueden dar una idea del estadodel arte de la aplicación de reguladoresmultifrecuencia: discretización de regu-ladores analógicos, asignación de polospor realimentación de la salida (casogeneral), asignación de polos porrealimentación de la salida en unesquema MRIC, regulador de cancelaciónen un esquema MRIC para sistemasSISO, asignación de polos por realimen-tación de la salida en un esquema MROC(Multirate Output Control), mapeo demodelo en un esquema MRIC, controlóptimo, muestreo irregular o asíncrono,control adaptativo, estimadores de estado,control robusto, control predictivo, PID,control no lineal, control de robots.
En general, de un estudio detallado de losartículos se puede concluir lo siguiente:
� La mayor cantidad de resultados sehan obtenido en el área de controlóptimo.
� Hay una buena cantidad de artículos(25%) dedicado a aspectos deaplicación del control multifrecuenciaen áreas muy diversas.
� En el diseño se parte de modelosparticulares. El diseño aplicado alcaso general de muestreo es pocotratado, pero sobresalen métodosbasados en la parametrización deYoula o Q.
� El modelo de muestreo más utilizadoes el MRIC debido a que la condiciónde causalidad (ver capítulo IV) secumple sin ningún problema (lostérminos directos en el compensadortienen la forma triangular inferior porbloques) y es posible ubicar arbitra-riamente los polos y ceros de faseno-mínima de la planta.
� El control multifrecuencia en esque-mas de muestreo MRIC presentaoscilaciones ocultas. Este es uno delos temas de más interés teórico. Suanálisis y solución se ha planteado dediversas maneras, entre las que seincluye el uso de integradores y filtros.Una excelente descripción y explica-ción de este problema se encuentra en(Tangirala, 1999).
� El caso de diseño a partir de modelosMROC se resuelve con la actuali-zación de las señales de control cadaperíodo global (se cumple con lacondición de causalidad introdu-ciendo un retardo en la actualizaciónde las entradas).
� En general, la restricción de causa-lidad es garantizada de variasmaneras: discretizando reguladorescontinuos, recurriendo a esquemasMRIC, utilizando la parametrizaciónde Youla o parametrización Q, usandooperadores anidado ("nest operators"),uso de precompensadores antes dela planta. Todas las políticas sugeridasse pueden agrupar en dos clases(Araki, 1993): una política construc-

REVI
STA
Unive
rsid
ad E
AFI
T N
o. 1
25 |
ene
ro.fe
bre
ro.m
arz
o |
200
2
13
El modelo de la planta continua es (se considera que la plantacontinua es controlable y observable):
[ ]
[ ]
1 1
1
,
,
p p
p p
TT
m p
T
n
donde
u u y y
x x
= +ìïí = +ïî
é ù= = ë û
=
x A x B u
y C x D u
u y
x
&
L L
L
(1)
El modelo discreto a período base T de la planta es:
[ ]
0
1 1
1
( 1) ) ( ) ( )
( ) ( ) ( )
( ) , ( )
, ,
p p
TT
p
m
p p
k T kT kT
kT kT kT
T e T e dt
t
+ = +ìí = +î
= = = =
é ù é ùê ú ê ú= = =ê ú ê úê ú ê úë û ë û
òA A
x Ax Bu
y Cx Du
A A B B B
C D
B B B C D
C D
L M M
(2)
tiva (uso de compensadores "correctos") y una políticaanalítica (parametrización de Youla).
� Siempre es posible garantizar la ubicación de polos y ceroscon reguladores estáticos multifrecuencia, aunque puedehaber una degradación en el comportamiento.
� Se estudia muy poco el control con muestreo irregular. Nose explota la irregularidad del muestreo (grado de libertadadicional) para el cumplimiento de aspectos como la contro-labilidad, observabilidad, comportamiento intermuestreo,etc.
3. MÉTODO DE MODELADO MULTIFRECUENCIA
Se puede obtener una descripción de los métodostradicionales de modelado multifrecuencia en varias fuentes(Glasson, 19383; Araki, 1993; Vélez, 1997). El método ZOHKranc MIMO se explica detalladamente en (Meyer, 1990; Vélez,1998). A continuación se describe con detalle la generalizacióndel método ZOH Kranc MIMO para el caso de muestreo irregular,del cual se deducen como casos particulares los métodostradicionales. En (Vélez, 2000; Vélez, 2001) se explica con másdetalle el modelo.
Los anteriores modelos se aplican a sistemas multifrecuenciacon muestreo regular (es decir, aunque cada variable puedemuestrearse con un período arbitrario, éste es constante). Elsiguiente modelo generaliza los resultados mencionadosanteriormente para el caso de sistemas multifrecuencia MIMOcon muestreo irregular (es decir, cada variable se muestreaarbitrariamente y en intervalos irregulares; sin embargo, lasecuencia se repite cada período global To). El caso demuestreo irregular ha sido explorado muy poco; uno de lostrabajos más interesantes en este campo es el realizado por(Salt, 1992), quien estudia y modela el caso particular de unsistema SISO en el que la salida se muestrea cada períodoglobal To , mientras que la entrada se muestrea N veces demanera irregular en dicho intervalo.
Aquí se considerará un sistema multifrecuencia irregular deorden n con m entradas y p salidas, tal y como se muestra enla figura 3. El esquema de muestreo se muestra en la figura 4.
Se considera que todas las entradas y salidas se sincronizancada período global.
FIGURA 3Sistema Multifrecuencia
FIGURA 4Esquema de Muestreo Irregular

14
Por sustituciones progresivas se llega al modelo que se indicaen las ecuaciones (3) y (4).
(( 1) ) ( ) ( )
( ) ( ) ( )
Do o o
D Do o o
k T kT kT
kT kT kT
ì + = +ïí
= +ïî
x Ax Bu
y Cx Du
% %
% % (3)
Los vectores en (3) tienen la siguiente forma:
[ ]
1
1
1
T
1 11 1 1
1 11 1 1
( ) ( ) ( )
( ) ( ) ( ) |
( ) ( ) ( ) |
T
o o n o
Do o o N
TDo o o N
kT x kT x kT
kT u kT T u kT T
kT y kT T y kT T
=
é ù= + +ë û
é ù= + +ë û
x
u
y
%
L
% %L L
L L
(4)
Los coeficientes e índices en (3) y (4) se especificandetalladamente en (Vélez, 2001).
T es el período base.
T0=NT es el período global.
jTn
% son los instantes de muestreo de la entrada.
jN% es el número de muestras de la entrada j en el períodoglobal T0.
Tiv son los instantes de muestreo de la salida. Para el casode muestreo regular:
Ni es el número de muestras de la salida i en el períodoglobal T0.
jln
% es la dimensión, en períodos T, de cada intervalo demuestreo irregular de la entrada j.
il m es la dimensión, en períodos T de cada intervalo demuestreo irregular de la salida i. Su definición essemejante a la dada arriba.
Del modelo anterior se deduce de una manera sencilla y directael modelo para el caso de muestreo regular, mencionadoanteriormente.
Se destaca en este modelo los siguientes aspectos:
� Modelado de sistemas multifrecuencia regulares o irre-gulares (muestreo arbitrario, pero que se repite cada períodoglobal T0).
� Las entradas y salidas se sincronizan cada período global.
� Representación invariable en el tiempo.
� Aplicación a sistemas SISO o MIMO.
� Consideración de un número arbitrario de entradas y salidas.
� Representación causal (observar la forma de la matriz).
� Sistema de dimensión mínima (no a máximo común divisor).
� Fácil obtención de casos particulares.
4. SIMULACIÓN DE SISTEMASMULTIFRECUENCIA
Para la simulación de sistemas multifrecuencia se hautilizado básicamente el programa CC y programas desa-rrollados por cada autor para sus fines articulares. En particular,el programa CC incluye los operadores de Kranc, vectorizacióny reducción.
Se desarrolló el Multirate Control Toolbox para MATLAB (Vélez,1999) para el modelado de sistemas multifrecuencia conmuestreo tanto regular como irregular. Con el toolbox se puedensimular fácilmente sistemas multifrecuencia, de manerasemejante a como se simulan sistemas monofrecuencia. Losdistintos bloques incluyen retenedores de orden cero en cadauna de las entradas y salidas, por lo que se pueden analizarsistemas híbridos análogo-digitales y el comportamientointermuestreo de las señales.
La simulación de sistemas multifrecuencia con el toolbox serealiza utilizando las S-Functions, las cuales permiten "jugar"(programar) con una mayor flexibilidad con los parámetros deun sistema dinámico (condiciones iniciales, dimensiones de lasmatrices, número de entradas y salidas, estados continuos ydiscretos, períodos de muestreo, almacenamiento de estados ycondiciones, etc). Aunque la estructura de programación de unaS-Function es bastante estándar (sfuntmpl.m es una plantilladocumentada de MATLAB que sirve de punto de partida), susposibilidades son casi ilimitadas, dándole una gran posibilidadde extensión al MATLAB/SIMULINK. Sin embargo, la utilizaciónde estas funciones sería poco práctica si no se tuviera laposibilidad de esconder (enmascarar) los detalles deprogramación a un usuario normal. Este proceso se puede hacerutilizando la opción de enmascaramiento ("mask") delSIMULINK. La combinación de S-Functions con la opciónde enmascaramiento hacen del Multirate Control Toolbox una

REVI
STA
Unive
rsid
ad E
AFI
T N
o. 1
25 |
ene
ro.fe
bre
ro.m
arz
o |
200
2
15
FIGURA 5Diagrama de Simulación de un Sistema Multifrecuencia
Es decir, D% tiene una estructura en bloques diagonal inferir (lasalida actual no depende de la entrada futura). El problema decausalidad no se presenta en esquemas de muestreo MRIC(muestreo rápido de entradas y lento de las salidas) o con ladiscretización de reguladores analógicos. Esta es una de lasrazones de su uso tan difundido.
Una vez obtenida la representación ampliada LTI del sistemamuestreado multifrecuencia, la clave consiste en determinarcomo usar (o modificar) los métodos de diseño existentes parasistemas monofrecuencia conservando la restricción decausalidad. Para resolver este problema se han sugerido 2políticas:
� Una constructiva, que usa compensadores "correctos" quesatisfacen la restricción de causalidad.
� Una analítica, que usa la parametrización de Youla con lacondición de causalidad.
A continuación se presenta un enfoque constructivo para el diseñode un regulador de asignación de polos multifrecuencia. Losmodelos multifrecuencia de la planta (aplicando el método demodelado expuesto anteriormente) y el regulador son,respectivamente:
(( 1) ) ( ) ( )
( ) ( ) ( )
dim( ) 1 , dim( ) 1, dim( ) 1
dim( ) ,dim( ) ,dim( )
dim( )
Do o o
D Do o
D D
k T kT kT
kT kT kT
n N N
n n n N N n
N N
ì + = +ïí
= +ïî
= ´ = ´ = ´
= ´ = ´ = ´
= ´
x Ax Bu
y Cx Du
x u y
A B C
D
% %
% %
% %%
%
herramienta potente y de fácil uso. Una máscara es una caja dediálogo que solicita la información exacta requerida para loscálculos; detrás de la máscara se realizan los cálculosintermedios y se llaman las funciones necesarias.
La idea básica de Multirate Control Toolbox (MCT) es la demuestrear cada señal de entrada a período base, verificar si enese instante se debe tomar alguna muestra, formar el vectorexpandido (vectorización), calcular la salida expandida, verificarsi en ese instante debe aplicar alguna salida (reducción). Lasimulación puede ser lenta si el período base es muy pequeño.El proceso es transparente y claro. Las "máscaras" facilitan laparametrización de los bloques.
Para la simulación de sistemas multifrecuenciase ha utilizado básicamente el programa CCy programas desarrollados por cada autor parasus fines articulares. En particular, el programaCC incluye los operadores de Kranc, vecto-rización y reducción.
5. DISEÑO DE REGULADORES MULTIFRECUENCIA
El diseño de reguladores multifrecuencia ha sido amplia-mente tratado en la literatura científica. En cada caso se parte demodelos propios desarrollados por cada autor. A continuación seexponen algunas ideas para el caso regular de controlmultifrecuencia. Aquí se diseñan los reguladores multifrecuenciaa partir de la representación invariable en el tiempo (LTI) de laplanta, asegurando la restricción de causalidad.
Se dice que un modelo discreto multifrecuencia satisface larestricción de causalidad si en D% :
, 0 siempre que Dij i jd T Tmn
m n= < %

16
(5)
(( 1) ) ( ) ( ) ( )
( ) ( ) ( ) ( )
dim( ) 1 , dim( ) ,dim( ) ,
dim( ) ,dim( )
D DR o R R o R o o
D D DR o R o o
R R R R R R R
R R R
k T kT kT kT
kT kT kT kT
n n n n N
N n N N
ì é ù+ = + -ï ë ûí
é ù= + -ï ë ûî= ´ = ´ = ´
= ´ = ´
x A x B r y
u C x D r y
x A B
C D
% %
% %
% %
% %
Se supone que la planta continua es observable y controlable. El problema de diseñodel regulador multifrecuencia se reduce al cálculo de la cuádruple
, , ,R R R Ré ùë ûA B C D% %% % según ciertas especificaciones de diseño. Obsérvese que eldiseño se hace a T0 y no a T.
Partiendo de los modelos multifrecuencia de la planta y el regulador, respectivamente,se puede aplicar el álgebra de bloques habitual de los sistemas monofrecuencia parallegar al siguiente modelo en lazo cerrado:
(( 1) ) ( )
(( 1) ) ( )
+ ( )
( )( )
( )
o o
R o R o
Do
oDo
R o
k T kT
k T kT
kT
kTkT
kT
+ é ù- -é ù é ù= +ê úê ú ê ú+ - -ë û ë ûë û
é ùê úë û
é ùé ù= +ê úë û ë û
R R R R
R R R R
R
R
R R
x xA BD NC BC BD NDCx xB NC A B NDC
BD Nr
B N
xy NC NDC NDD
x
% % % %% % % % % %
% % %% % %
% %
%
% %% % %
1
( )
donde, ( ) y
dim( ) ( ) ( ) dim( ) ( )
dim( ) ( ), dim( )
Do
RN
cl R R cl R
cl R cl
kT
A n n n n B n n N
C N n n D N N
-
ìïïïïíïïïïî
= +
= + ´ + = + ´
= ´ + = ´
r
N I DD% %
% %
% %
(6)
Para el caso de compensación estática: R =D F% % y las demás matrices son ceros.En ese caso la ecuación anterior toma una forma más simple:
(( 1) ) ( ) ( ) ( )
( ) ( ) ( )
Do o o
D Do o o
k T kT kT
kT kT kT
ì + = - +í
= +î
x A BFNC x BFNr
y NCx NDFr
% % % % %
% % %(7)
Una versión del método de asignación de polos fue desarrollado por (Eckardt, 1989).A continuación se obtiene el respectivo regulador a partir del modelo presentadoanteriormente. El regulador que se diseña se representa por una matriz constante F% .Teniendo en cuenta que la discretización de la planta (con D = 0) corresponde a unMRIC, se puede aplicar el modelo teniendo en cuenta que R R R= = =A B C 0% %% y
R N p´=D F% % . Reemplazando en (7) se obtiene el siguiente modelo en lazo cerrado:
(( 1) ) ( ) ( ) ( )
( ) ( )
N Do o o
Do o
k T kT kT
kT kT
ì + = - +í
=î
x A BFC x BFr
y Cx
% % % %
(8)
La realización es completamente causal, como era de esperar. Por ello, el siguientediseño es completamente realizable. La ecuación característica del sistema en lazocerrado es:
det( ) 0No nz - + =I A BFC% % (7)
La ecuación se puede resolver por losmedios habituales para sistemas mono-frecuencia. El regulador de Eckardt y suscondiciones se obtienen aquí de unamanera sencilla y directa. La salida de laplanta con este regulador presentaoscilaciones ocultas (fenómeno inde-seado). El regulador presenta un compor-tamiento FIR (finite impulse response).(Hagiwara y Araki, 1998) hacen unanálisis del regulador anterior: el rizado sepresenta sobretodo cuando n > m.
Para un sistema monofrecuencia elproblema de asignación de n (orden delsistema) polos con un regulador estáticosolo es posible si 1m p n+ ³ - . Alpasar el problema a multifrecuencia seintroducen
1 mN N N= +% %L variablesque permite que el problema deasignación de polos sea factible.
Las oscilaciones ocultas en los sistemasde control multifrecuencia se puedenexplicar como una consecuencia de laexpansión de cada una de las variables decontrol y su consideración, a partir deese momento, como señales indepen-dientes (problema de diseño). Dichoproblema no se presenta en esquemas decontrol MROC, donde se expanden lassalidas pero no las entradas.
6. EJEMPLOS
6.1 Regulador PID multifrecuencia
Se tomó un regulador PID mono-frecuencia previamente diseñado y se leredujo el período de control. Aplicando elmétodo de modelado expuesto en estetrabajo se obtiene el siguiente reguladorPID multifrecuencia:

REVI
STA
Unive
rsid
ad E
AFI
T N
o. 1
25 |
ene
ro.fe
bre
ro.m
arz
o |
200
2
17
1 0 1 3.94 4.7 12.72, , ,
1 0 0 0 0 0
-é ù é ù é ù é ù= = = =ê ú ê ú ê ú ê ú
ë û ë û ë û ë ûA B C D% %% %
Se realiza una prueba con T2 = Tcl = 0.3 seg (sistema monofrecuencia), T2 = Tcl = 0.15 seg y T2 = Tcl= 0.1 seg. Losresultados de la simulación se muestran en la figura 7. Al disminuir Tcl el sobreimpulso disminuye y el sistema seestabiliza más rápido. Aquí se observa una de las razones para utilizar el control multifrecuencia: la respuesta transitoriapuede mejorar al reducir el período de control Tcl .
FIGURA 6Regulador PID Multifrecuencia
FIGURA 7Resultados con un regulador PID multifrecuencia
6.2 Diseño directo de reguladores multifrecuencia enesquemas MRIC. Sistema SISO
Sea el siguiente sistema:
1 1
1 1
1( ) 1 12 1/6
(0.5 1)( 1)
1, 2, 2, 1/6, 1, 2, 2
p
o
G s T / , Ts s
m p n N n T l N N
= = =+ +
= = = = = = = = =
%
%%
Aplicando el modelo presentado para el caso regular se obtieneel siguiente modelo multifrecuencia de la planta:
[ ]
2.3418 1.3758 1.7665 1,
1.7665 0.7788 1 0
0.0064 0.0059
-é ù é ù= =ê ú ê ú-ë û ë û
=
A B
C = C
% %
%
0 1 2 3 4 5 6 7 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
t (seg)
Tcl = 0.3
Tcl = 0.2
Tcl = 0.1
El cálculo del regulador da, para una ubicación de los polos ens = -4, el siguiente resultado:
44.38
-35.53
é ù= ê ú
ë ûF%
FIGURA 8Respuesta temporal de un sistema SISO en un
esquema MRIC
0 0.5 1 1.5 2 2.5 3 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
time (sec)
Output
Los resultados de la simulación (con el Multirate Control Toolbox)se muestran en la figura 8. El rizado se puede eliminar si se utilizaun integrador de la manera adecuada.
6.3 Diseño directo de reguladores multifrecuencia enesquemas MRIC. Sistema MIMO
Sea el siguiente sistema:

18
2.5 0 0 2.5 04 1 0
0 2 0 10 1.2 , 1/3 0 1
0 0 1 5/6 1
-é ù é ù-é ùê ú ê ú= - + - = ê úê ú ê ú -ë ûê ú ê ú-ë û ë û
x x u y x&
To = 0.2 seg., n = 3, p= m = 2. Combinaciones de losíndices de controlabilidad: (3,0) , (2,1) y (1,2).
Sea 1 1 2 22 y 1N n N n= = = =% %% % . Es decir,
1 20.1 y 0.2T T= =% % .
En este caso, el modelo multifrecuencia de la planta es:
0.6065 0 0 0.1723 0.2212 0
0 0.6703 0 , 0.7421 0.9063 0.1978
0 0 0.8137 0.0718 0.0793 0.1813
4 1 0 ,
1/3 0 1
é ù é ùê ú ê ú= = -ê ú ê úê ú ê úë û ë û
-é ù= ê ú-ë û
A B
C D= 0
% %
% %
El regulador es, para una ubicación de los polos en el planocontinuo en s = -3:
0.6671 0.9007
0.6222 0.9294
0.1583 2.0843
é ùê ú= -ê úê ú-ë û
F%
El resultado de la simulación (con el Multirate Control Toolbox)se muestra en la figura 9.
FIGURA 9Respuesta temporal de un sistema MIMO
en un esquema MRIC
La respuesta temporal es adecuada y no presenta oscilacionesocultas.
CONCLUSIONES
Se presentaron las principales ideas y métodos del controlmultifrecuencia. Se mostró el estado del arte del área,incluyendo métodos de análisis y diseño. Al final se presenta unalista seleccionada de referencias bibliográficas que pueden servirde punto de partida para la profundización en el tema.
Se mostró, como ilustración, un método de modelado multi-frecuencia. Este modelo presenta algunas característicasinteresantes: representación compacta (ideal para el diseño y laimplementación), arbitrario número de entradas y salidas,régimen arbitrario de muestreo, fácil deducción de casosparticulares, entre otros. Se incluyeron expresiones matemáticasy ejemplos.
Se ilustró el uso del Multirate Control Toolbox para MATLAB/SIMULINK, desarrollado por los autores y el cual permite la fácilsimulación de sistemas híbridos multifrecuencia, permitiendo elanálisis del comportamiento intermuestreo de las diferentesseñales.
El diseño se trató a partir del modelo presentado. Se estudió elcaso particular de un regulador de asignación de polos para unsistema MRIC (multirate input control) y se mostró el caminopara el diseño de otros reguladores semejantes. La eliminaciónde oscilaciones ocultas es un problema de gran interés en elcontrol multifrecuencia.
RECONOCIMIENTOS
Los más sinceros agradecimientos a la Universidad EAFIT y a laUniversidad Politécnica de Valencia por facilitar el tiempo y losrecursos necesarios para realizar este trabajo.
REFERENCIAS
Albertos, P. (1990). "Block Multirate Input-Output Model forSampled-Data Control Systems". En: IEEE Transactions onAutomatic Control. Vol. 35. No 9. pp. 1085-1088.
Amit, N. (1980). Optimal Control of multirate digital controlsystems. Report SUDAAR #523. Stanford: StanfordUniversity.
0 0.5 1 1.5 2 2.5 3 3.5 4
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
t (seg)

REVI
STA
Unive
rsid
ad E
AFI
T N
o. 1
25 |
ene
ro.fe
bre
ro.m
arz
o |
200
2
19
Apostolakis, I.S. and Jordan, D. (1991). "A time invariantapproach to multirate optimal regulator design". En:International Journal of Control. Vol. 53. pp. 1233-1254.
Araki, M. and Yamamoto, K. (1986). "Multivariable multiratesampled-data systems: state-space description, transfercharacteristics, and Nyquist criterion". En: IEEE Transactionson Automatic Control. Vol. 31. pp. 145-154.
Araki, M., Hagiwara, T. and Soma, H. (1992). "Application ofmultilevel sampled-data controllers to simultaneous poleassigment problem". En: Proceedings on 31th Conferenceon Decision and Control. pp. 1762-1767.
Araki, M. (1993). "Recent development in digital control theory".En: Proc. 12th IFAC World Congress. Vol. 9. pp. 951-960.
Barry, P.E. (1975). Optimal control of multirate systems. ReportRN-361. Research Department, Grumman AerospaceCorporatin.
Broussard, J.R. and Glasson D.P. (1980). "Optimal multirate flightcontrol design". En: Proceedings of the Joint AutomaticControl Conference.
Choe, Y.W. and Araki, M. (1992). "Control of serial samplingsystems". En: IEEE Transactions on Automatic Control. Vol.37. pp. 1202-1205.
Eckardt, D. (1989). "Design of finite response controllers by poleassigment in multirate sampled-data systems". En:International Journal of Control. Vol. 49. No. 4. pp. 1185-1193.
Glasson, D.P. (1983). "Development and Applications of MultirateDigital Control". En: Control System Magazine. Vol. 3. No. 4.pp. 2-8.
Godbout, L.F., Jordan, D. and Apostolakis, I.S. (1990). "Closed-loop model for general multirate digital control systems". En:IEE Proceedings. Vol. 137. pp. 326-336.
Hagiwara, T. and Araki, M. (1988). "Design of a stable feedbackcontroller based on the multirate sampling of the plantoutput". En: IEEE Transactions on Automatic Control. Vol. 33.pp. 812-819.
Hagiwara, T., Fujimura, T. and Araki, M. (1990). "Generalizedmultirate-output controllers". En: International Journal ofControl. Vol. 52. No. 3. pp. 597-612.
Ito, H. (2000). "Improvement of deadbeat servomechanism usingmultirate input control". En: Proceedings of American ControlConference. Vol. 1. No. 6. pp 169 -174.
Jury, E.I. (1967). "A note on multirate sampled-data systems".En: IEEE Transactions on Automatic Control. Vol. 12. pp.319-320.
Kalman, R.E. and Bertram, J.E. (1959). "A unified approach to thetheory of samplig systems". En: Journal of Franklin Institute.Vol. 267. pp. 405-436.
Kranc, G.M. (1957). "Input-output analisys of multirate feedbacksystems". En: IRE Transactions on Automatic Control. PGAC-3. Vol 3. pp. 21-28.
Meyer, D. (1988). "Toward a new CAD method for MIMOmultirate digital controllers". En: Proceedings of 27thConference on Decision and Control. pp. 889-1891.
Meyer, D.G. (1990). "A new class of shift-varying operators, theshift-invariant equivalents and multirate digital systems". En:IEEE Transactions on Automatic Control. Vol. 35. pp. 429-433.
Moore, K.L., Bhattacharyya S.P. and Dahleh, M. (1993)."Capabilities and limitations of multirate control schemes".En: Automatica. Vol. 29. No.4. pp. 941-951.
Paraskevopoulos, P.N., Arvanitis, K.G. and Frantzikinakis H.E.(1994). "Digital control of distillation columns usingsinglerate and multirate periodic controllers". En: InternationalConference on Control. Vol. 1. pp 261-267.
Salt, J. (1992). Control de Procesos con Muestreo No-Convencional. Tesis Doctoral. Valencia: UniversidadPolitécnica de Valencia.
Sklansky, J. and Ragazzini J.R. (1955). "Analysis of errors insampled-data feedback systems". En: AIEE Trans. Vol. 74. a,A.K., Sirish, L.S. and Chen, T. (1999). "Conditions forRemoving Intersample Ripples in Multirate Control". En: IEEECanadian Conference on Electrical and ComputerEngineering. Vol. 3. pp 1585-1589.
Thompson, P.M. (1986). "Gain and phase margin of multiratesampled-data feedback systems". En: International Journal ofControl. Vol. 44. pp. 833-846.

20
Vélez, C.M. (1997). "Una visión al control digital con muestreomultifrecuencia". En: II Congreso de la ACA. pp 140-146.
Vélez, C.M. y Salt, J. (1998). "Métodos, conceptos yperspectivas del diseño de controladores multifrecuencia".En: VIII Congreso Latinoamericano de Control Automá-tico. pp 541-546.
Vélez, C.M. (1999). "Simulation of multirate control systems inMATLAB/SIMULINK". En: Second Manufacturing Congress.Pp 84-90.
Vélez, C.M. y Salt, J. (2000). "Modelación de sistemasmultifrecuencia con muestreo irregular". En: IX CongresoLatinoamericano de Control Automático. pp 13-19.
Vélez, C.M. (2001). Modelado y simulación de sistemas conmuestreo no convencional. Tesis Doctoral. Valencia:Universidad Politécnica de Valencia.
Whitbeck, R.F. and Didaleusky, D.C.J. (1980). Multirate digitalcontrol systems in simulation applications. ReportAFWAL-TR-80-3101. Ohio: Air Force Wright AeronauticalLaboratory.