MOTORES (2)
21
MOTORES Origen de las máquinas eléctricas Las diferentes etapas en que han sido desarrollados los convertidores electromagnéticos de energía (máquinas eléctricas que transforman energía mecánica en eléctrica y viceversa) desde que en 1832 apareció el primer artilugio hasta nuestros días, han sido muy valiosas si analizamos las aportaciones que éstos han prestado al desarrollo tecnológico e industrial de la humanidad. El fundamento teórico en el que se basa el funcionamiento de los convertidores electromecánicos se encuentra en los tres principios fundamentales de la inducción electromagnética, que podemos resumirlos en: • Una corriente eléctrica que circula por un conductor arrollado a un núcleo metálico de hierro o acero hace que éste se comporte como un imán. • Las corrientes eléctricas ejercen entre sí fuerzas a distancia. • Cuando se mueve un conductor en el seno de un campo magnético, se produce (induce) sobre él una corriente eléctrica. Estos principios constituyen la génesis de las máquinas eléctricas y son debidos, en gran medida, al trabajo de tres grandes hombres de ciencia: • Dominique François Jean Arago (1786-1853). • André Marie Ampère (1775-1836). • Michael Faraday (1791-1867).
-
Upload
christian-ft -
Category
Documents
-
view
227 -
download
3
description
saddada
Transcript of MOTORES (2)

MOTORESOrigen de las máquinas eléctricas
Las diferentes etapas en que han sido desarrollados los convertidores electromagnéticos de energía (máquinas eléctricas que transforman energía mecánica en eléctrica y viceversa) desde que en 1832 apareció el primer artilugio hasta nuestros días, han sido muy valiosas si analizamos las aportaciones que éstos han prestado al desarrollo tecnológico e industrial de la humanidad.
El fundamento teórico en el que se basa el funcionamiento de los convertidores electromecánicos se encuentra en los tres principios fundamentales de la inducción electromagnética, que podemos resumirlos en:
• Una corriente eléctrica que circula por un conductor arrollado a un núcleo metálico de hierro o acero hace que éste se comporte como un imán.
• Las corrientes eléctricas ejercen entre sí fuerzas a distancia.
• Cuando se mueve un conductor en el seno de un campo magnético, se produce (induce) sobre él una corriente eléctrica.
Estos principios constituyen la génesis de las máquinas eléctricas y son debidos, en gran medida, al trabajo de tres grandes hombres de ciencia:
• Dominique François Jean Arago (1786-1853).
• André Marie Ampère (1775-1836).
• Michael Faraday (1791-1867).
Maquinas Eléctricas RotativasDefinición
Se entiende por máquina eléctrica al conjunto de mecanismos capaces de generar, aprovechar o transformar la energía eléctrica.
Si la máquina convierte energía mecánica en energía eléctrica se llama generador, mientras que si convierte energía eléctrica en energía mecánica se denomina motor. Esta relación se conoce como principio de conservación de la energía electromecánica.

Teniendo en cuenta lo que hemos estudiado hasta el momento, podemos clasificar las máquinas eléctricas rotativas en:
• Generadores. Transforman la energía mecánica en energía eléctrica.
• Motores. Transforman la energía eléctrica en energía mecánica.
Podemos realizar otra clasificación de las máquinas eléctricas teniendo en cuenta el tipo de corriente eléctrica que utilizan, el número de fases, etc.

Constitución general de las máquinas eléctricas rotativas
La constitución de toda máquina eléctrica rotativa (tanto de c.c. como de c.a.) es muy similar. Si sacrificamos un excesivo rigor científico por brevedad y sencillez, describiremos a continuación las partes más relevantes de toda máquina eléctrica rotativa, lo cual nos permitirá conocer tanto sus limitaciones como sus aplicaciones más adecuadas.
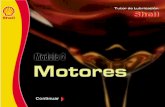
Toda máquina eléctrica rotativa consta de los siguientes elementos básicos, representados en la Figura 7.1.
• Inductor.
• Inducido.
• Escobillas.
• Culata o carcasa.
• Entrehierro.
• Cojinetes.
Inductor
Es una de las dos partes fundamentales que forman una máquina eléctrica, se encarga de producir y de conducir el flujo magnético. Se le llama también estator por ser la parte fija de la máquina.
El inductor, a su vez, consta de los siguientes elementos: la pieza polar, el núcleo, el devanado inductor y la expansión polar.
La pieza polar, sujeta a la culata de la máquina, incluye al núcleo propiamente dicho y a su expansión.
El núcleo forma parte del circuito magnético de la máquina junto con los polos, las expansiones polares, el entrehierro, inducido y la culata, y en él se encuentran los devanados inductores.
El devanado inductor está formado por el conjunto de espiras que, en número prefijado para cada tipo de máquina, producirá el flujo magnético cuando circule la corriente eléctrica.
La expansión polar es la parte más ancha de la pieza polar, y se encuentra próxima al inducido o rotor de la máquina.
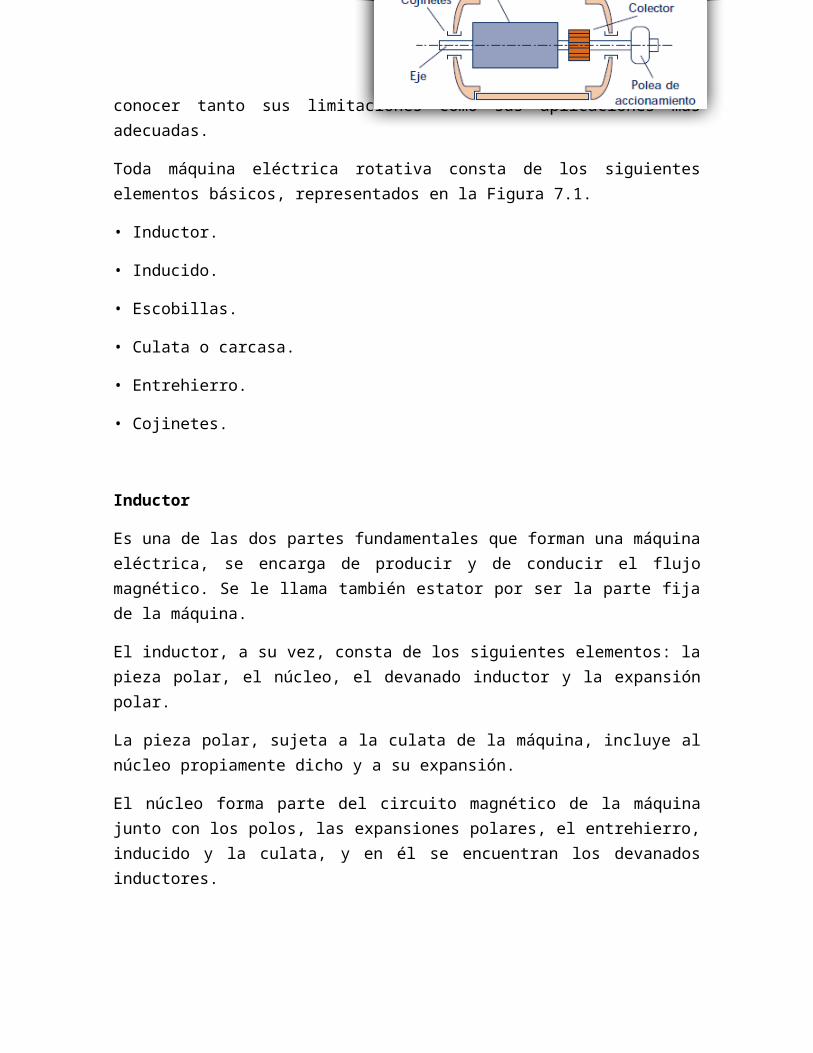
Inducido
El inducido constituye el otro elemento fundamental de la máquina (Fig. 7.2). Se denomina también rotor por ser la parte giratoria de la misma. Consta, a su vez, de núcleo del inducido, devanado inducido y colector.
El núcleo del inducido está formado por un cilindro de chapas magnéticas que están construidas, generalmente, de acero laminado con un 2 % de silicio para mejorar las pérdidas en el circuito magnético. Este cilindro se fija al eje de la máquina, el cual descansa sobre unos cojinetes de apoyo.
Las chapas que forman el inducido o rotor de la máquina disponen de ranuras en las que se alojan los hilos de cobre del devanado inducido.
El devanado inducido se encuentra conectado al circuito exterior de la máquina a través del colector, y es en él donde se produce la conversión de energía.
El colector es un conjunto de láminas de cobre, denominadas delgas, aisladas entre sí y conectadas a las secciones del devanado del inducido. Sobre las delgas se deslizan las escobillas.
Escobillas
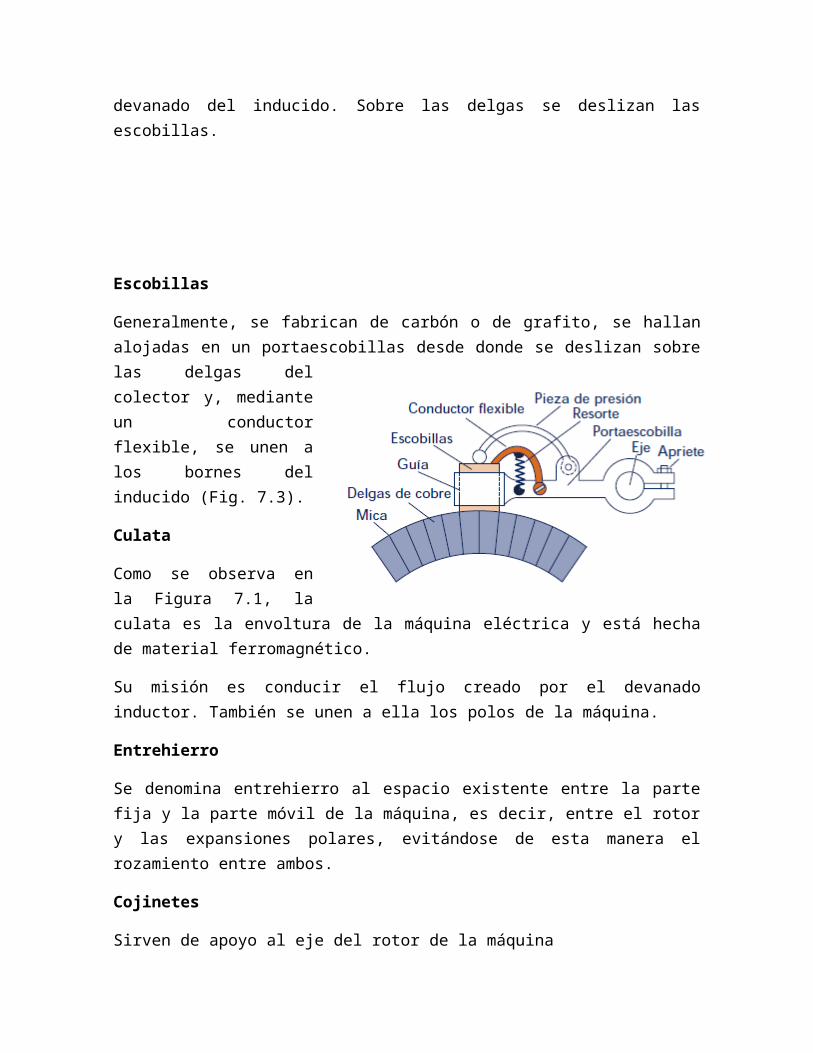
Generalmente, se fabrican de carbón o de grafito, se hallan alojadas en un portaescobillas desde donde se deslizan sobre las delgas del colector y, mediante un conductor flexible, se unen a los bornes del inducido (Fig. 7.3).
Culata
Como se observa en la Figura 7.1, la culata es la envoltura de la máquina eléctrica y está hecha de material ferromagnético.
Su misión es conducir el flujo creado por el devanado inductor. También se unen a ella los polos de la máquina.
Entrehierro
Se denomina entrehierro al espacio existente entre la parte fija y la parte móvil de la máquina, es decir, entre el rotor y las expansiones polares, evitándose de esta manera el rozamiento entre ambos.
Cojinetes
Sirven de apoyo al eje del rotor de la máquina
El motor trifásico de inducción
El sistema trifásico
Las redes trifásicas de baja tensión están formadas por los tres conductores activos R, S y T, y pueden ejecutarse con o sin conductor neutro. Los conductores neutros están unidos al centro de la estrella del generador o del transformador correspondiente al lado de baja tensión. Dos conductores activos, o uno de ellos y el neutro, constituyen un sistema de corriente alterna monofásica.
Tensión de servicio
La tensión existente entre dos conductores activos (R, S, T) es la tensión de línea (tensión compuesta o tensión de la red). La tensión que hay entre un conductor activo y el neutro es la tensión de la fase (tensión simple).
Las tensiones normalizadas para las redes de corriente trifásica, en baja tensión, son las siguientes:
Conexión de motores trifásicos
Los motores trifásicos se conectan los tres conductores R,S,T.
La tensión nominal del motor en la conexión de servicio tiene que coincidir con la tensión de línea de la red (tensión de servicio).
Conexión de servicio de los motores trifásicos y sus potencias nominales:

Sentido de giro de los motores
Los bornes de los motores trifásicos están marcados de tal manera, que el orden alfabético de la denominación de bornes U, V,
W, coincide con el orden cronológico si el motor gira hacia la de recha. Esta regla es válida para todas las máquinas, cualquiera que sea su potencia y su tensión. Tratándose de máquinas que sólo sean apropiadas para un sentido de giro, estará éste indicando por una flecha en la placa de características. Debajo de la flecha consta en qué orden se desconectarán los bornes con las fases correlativas de la red.
Se consigue invertir el sentido de giro, intercambiando la conexión de dos conductores de fase.
Antes de poner en marcha el motor debe revisarse la conexión y el sentido de giro.
Puesta a tierra
Los motores tienen en la caja de conexiones un tornillo para empalmar el conductor de tierra. Si se trata de motores, superiores al tamaño constructivo 180, para la puesta a tierra se dispone adicionalmente un borne en la pata o bien en la carcasa.
Variación en la tensión y en la frecuencia de la red
Para motores provistos de devanado normal. Comportamiento de los valores de servicio:

A) Modificación de la tensión sin que varíe la frecuencia
El par de arranque y el par motor máximo varían aproximadamente con el cuadrado de la tensión; la intensidad de arranque se modifica en una relación aproximadamente proporcional a la tensión.
Con desviaciones de hasta + 5% respecto a la tensión nominal, se puede suministrar la potencia nominal. En este caso, se podrá sobrepasar en 10ºC la temperatura límite.
a) Aumento de la tensión (suponiendo que la potencia suministrada permanece constante).
1. La corriente magnetizante en motores de elevada saturación, limitan el aumento que puede experimentar la tensión; en este caso se encuentran especialmente los motores cuya potencia asciende hasta 3kW, aproximadamente, los cuales ya presentan, a la tensión nominal una intensidad en vacío relativamente elevada.
2. La intensidad en el estator, que representa la suma geométrica de la componente de corriente dependiente de la carga y de la corriente magnética, se reduce generalmente.
En los motores de hasta 3kW puede predominar la influencia de la corriente magnetizante y, en consecuencia, aumentar la intensidad en el estator.
3. El factor de potencia será menor a la misma potencia: el origen de ello es el aumento de la corriente magnetizante y la reducción de la corriente activa.
4. Las pérdidas en el rotor y, en general, en el estator serán menores. El calentamiento del motor depende de cómo se modifican las pérdidas en el hierro y en el cobre. Por regla general, se modificará apenas prácticamente con las fluctuaciones normales de la tensión.
5. El rendimiento tampoco variará mucho, elevándose o reduciéndose en dependencia de si predomina la reducción en las pérdidas en el cobre o el aumento en las pérdidas en el hierro.
6. La velocidad de reducción aumentará ligeramente, por ser menores las pérdidas en el rotor.
b) Reducción de la tensión.

1. La corriente magnetizante, la densidad de flujo, las pérdidas en el hierro y, por lo tanto, en el calentamiento del mismo, serán menores.
2. La intensidad en el estator, que representa la suma geométrica de la componente de corriente dependiente de la carga y de la corriente magnetizante, aumenta generalmente. En los motores de hasta 3kW, puede predominar la influencia de la corriente magnetizante y, en consecuencia, reducirse la intensidad en el estator.
3. Se mejora el factor de potencia (menor corriente magnetizante, mayor corriente activa).
4. Las pérdidas en el rotor y en general las pérdidas en el cobre del estator aumentan. Normalmente, será mayor el calentamiento.
5. El rendimiento apenas de modificará.
6. La velocidad de rotación descenderá ligeramente.
B) Variación de la frecuencia permaneciendo constante la tensión
Con desviaciones de hasta +5% respecto a la frecuencia nominal, se puede suministrar la potencia nominal.
El valor absoluto del par inicial de arranque y del par máximo varían en relación inversamente proporcional a la frecuencia; la velocidad de rotación varía, aproximadamente, en relación directa con la frecuencia.
Al modificar la frecuencia, las restantes propiedades de funcionamiento del motor varían en relación inversa a como sucede en caso de producirse un cambio en la tensión.
C) Variación de la tensión y de la frecuencia simultáneamente
Si la tensión y la frecuencia aumentan o disminuyen aproximadamente en igual proporción, no varían las condiciones magnéticas. El motor desarrollará el par motor nominal. Aproximadamente, la velocidad de rotación y la potencia varían en la misma proporción que la frecuencia. El par resistente puede no alterarse. Tratándose de frecuencias reducidas, la potencia disminuye en mayor medida, por ser la ventilación menos efectiva.

Motores de corriente continúaConceptos Generales
La diferencia fundamental entre un generador y un motor de corriente continua estriba en la utilización que se hace de la máquina, la cual viene dada en función de la transformación de energía que tiene lugar durante su funcionamiento y que, en caso del motor, se trata de conversión de energía eléctrica en energía mecánica. Los distintos tipos de excitación de motores de c.c. son los mismos que se utilizan para los generadores, lo que implica que una misma máquina funcione como generador o como motor.
Par electromagnético de una máquina de corriente continúa
Los conductores del inducido de una máquina de c.c. se encuentran sometidos a fuerzas que hacen que éste gire en sentido contrario a las agujas del reloj debido a que por ellos circula una corriente eléctrica, como se indica en la Figura 7.32a-b.
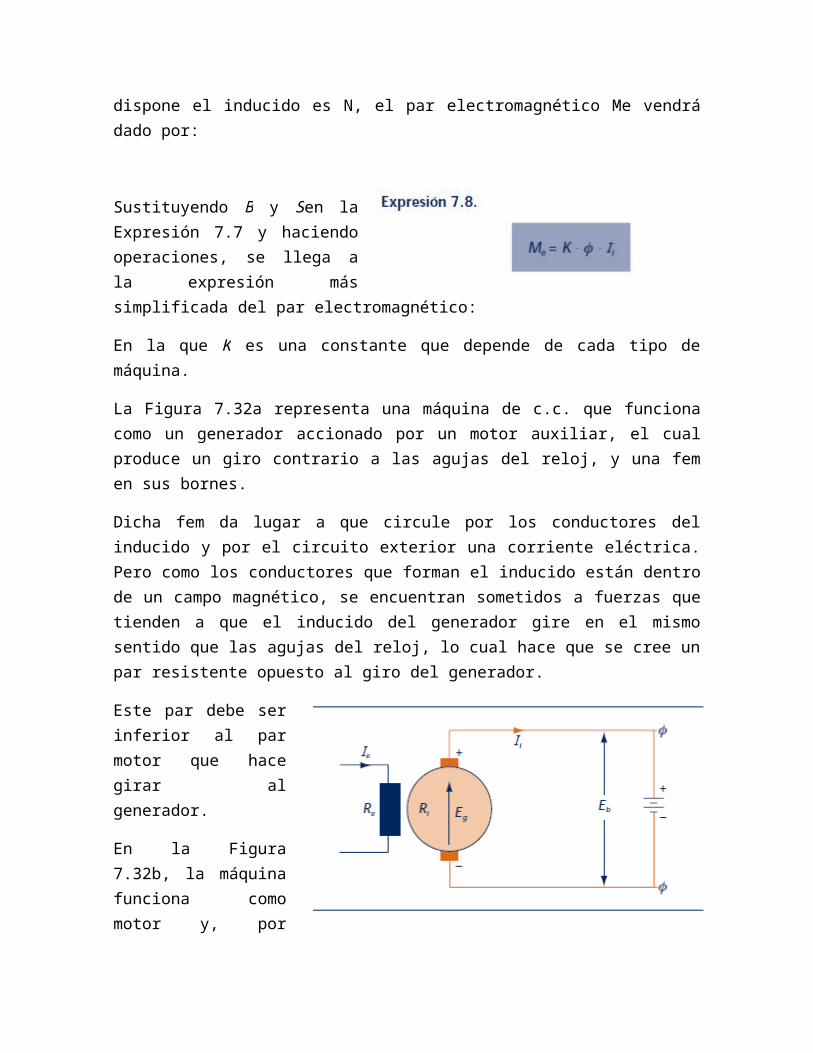
Si el número total de conductores de que dispone el inducido es N, el par electromagnético Me vendrá dado por:
Sustituyendo B y Sen la Expresión 7.7 y haciendo operaciones, se llega a la expresión más simplificada del par electromagnético:
En la que K es una constante que depende de cada tipo de máquina.
La Figura 7.32a representa una máquina de c.c. que funciona como un generador accionado por un motor auxiliar, el cual produce un giro contrario a las agujas del reloj, y una fem en sus bornes.
Dicha fem da lugar a que circule por los conductores del inducido y por el circuito exterior una corriente eléctrica. Pero como los conductores que forman el inducido están dentro de un campo magnético, se encuentran sometidos a fuerzas que tienden a que el inducido del generador gire en el mismo sentido que las agujas del reloj, lo cual hace que se cree un par resistente opuesto al giro del generador.
Este par debe ser inferior al par motor que hace girar al generador.
En la Figura 7.32b, la máquina funciona como motor y, por tanto, las fuerzas originadas en los conductores del inducido hacen que éste gire en sentido contrario a las agujas del reloj.
De la misma forma que en el caso anterior, se genera en los bornes una fem que, si la máquina se comporta como motor, se opone a la corriente que circula por los conductores del inducido; esta fem recibe el nombre de fuerza contraelectromotriz (fcem) del motor.
Ecuación de la intensidad de un motor de corriente continúa
Si se considera un motor con excitación independiente, como se muestra en la Figura 7.33, y sabiendo que la fem generada se opone a la corriente que circula por los conductores del inducido y es opuesta a la fem aplicada, tendremos que su valor vendrá dado por:
Despejando Iide la Expresión 7.9 obtenemos que la expresión de la intensidad de un motor de c.c. conectado a una tensión de Eb y con una resistencia de inducido R i.
Si en la Expresión 7.10 se multiplican los dos miembros de la igualdad por I i se obtiene la ecuación de las potencias
Ejercicio

Ecuación de la velocidad de un motor de corriente continúa
De la Expresión 7.9 se deduce que la fcem de un motor se diferencia de la fem aplicada en la caída de tensión en el inducido Ri · Ii .
Por otro lado, y según la Expresión 7.5, Eg es proporcional al flujo y a la velocidad de giro:
Sustituyendo Eg por su valor expresado en la Expresión 7.9 resulta que:
De la Expresión 7.12 se deduce que la tensión en bornes, Eb, es constante por ser la tensión de la línea a la que se conecta el motor, y que la caída de tensión, Ri·Ii tiene, por regla general, un valor despreciable frente a Eb. Este hecho implica que cuando el flujo f disminuye, la velocidad tiene que aumentar para poder generar el valor de Eg que se necesita.
Campo Magnético GiratorioRecordemos que un sistema trifásico es el compuesto por tres tensiones de igual intensidad, igual frecuencia, desplazadas una de la otra por un ángulo de fase de 120° eléctricos
Si a cada una de las tres bobinas de un motor trifásico le conectamos una fase de un sistema de tensiones trifásico, en cada una de ellas se producirá un campo magnético pulsante siguiendo el eje geométrico de la bobina. Esto significa que en cada instante la intensidad del campo magnético producido por la bobina varía. La intensidad del campo magnético será máxima cuando la tensión pase por su valor máximo y será igual a cero cuando la tensión sea igual a cero. En ese preciso instante la tensión cambia de sentido, por lo que el campo magnético también cambia de sentido.
El valor de la intensidad del campo magnético depende de la construcción de la bobina y del valor que la tensión que lo alimenta tenga en ese instante.
Dentro del motor, en cada instante, habrá un campo magnético resultante de la suma de los producidos por cada una de las tres bobinas. Analizaremos la posición de ese campo magnético resultante para algunos ángulos destacados del sistema trifásico de tensiones.
Por convención tomamos que cuando la tensión aplicada a una bobina es positiva, el campo magnético que esta produce entra al motor, por lo contrario si la tensión es negativa, el campo producido sale del motor.
Instante inicial 0°
Suponiendo que el análisis se inicia cuando el sistema trifásico está en la posición de 0 ° eléctrico.
La tensión de la faseL1 vale U 1=0V , no existe el campo magnético Ф1;
La tensión de la fase L2 vale U 2=−0,866x U 2maxV ,Ф2=0,866 xФ2max y es saliente;
La tensión de la fase L3 vale U 3=0,866 xU 3maxV ,Ф3=0,866 xФ3max y es entrante.
Aplicando la regla del paralelogramo para sumar vectores, vemos que el campo magnético resultante ФT tiene una posición de 90 ° respecto a la vertical y vale ФT=1,5 xФ1max=1,5x

Ф2max=1,5xФ2max. Es decir, vale una vez y media más que el valor máximo producido por una de las bobinas.
Instante 30°
Cuando el sistema trifásico está en la posición de 30° eléctricos, es decir, para una red de 50 Hz, 1,66 msegmás tarde.
La tensión de la fase L1 vale U 1=0,5 x U 1maxV ,Ф1=0,5 xФ1max y es entrante;
La tensión de la fase L2 vale U 2=−U 2maxV ,Ф2=Ф2max y es saliente;
La tensión de la fase L3 vale U3= 0,5x U3max V, Ф3= 0,5x Ф3 max y es entrante.
Aplicando nuevamente a la regla del paralelogramo para sumar vectores, vemos que el campo magnético resultante ФT ahora tiene una posición de 120 ° respecto a la vertical y que también vale ФT=1,5 xФ1max=1,5xФ2max=1,5 xФ2max .
Instante 60°
Cuando el sistema trifásico está en la posición de 60 °eléctricos, o sea, 1,66mseg más tarde y 3,33mseg del instante inicial.
La tensión de la fase L1vale U 1=0,866 x U 1maxV ,Ф1=0,866 xФ1max y es entrante;
La tensión de la fase L2 vale U 2=−0,866x U 2maxV ,Ф2=0,866 xФ2maxy es saliente;
La tensión de la fase L3vale U 3=0V ,Ф3=0.
Aplicando siempre la regla del paralelogramo, vemos que el campo magnético resultante ФT ahora tiene una posición de 150 °respecto a la vertical y que también vale ФT=1,5 xФ1max=1,5xФ2max=1,5 xФ2max .
Instante 90°
Cuando el sistema trifásico está en la posición de 90° eléctricos, o sea, 1,66mseg más tarde y5mseg del instante inicial.
La tensión de la fase L1 vale U 1=U 1maxV ,Ф1=Ф1max y es entrante;

La tensión de la fase L2 valeU 2=−0,5x U 2maxV ,Ф2=0,5xФ2 max y es saliente;
La tensión de la fase L3 vale U 3=−0,5 xU 3maxV ,Ф3=0,5 xФ3max y es saliente;
Comprobamos ahora que el campo magnético resultante ФT ahora tiene una posición de 180° respecto a la vertical y que también vale ФT=1,5 x Ф1max=1,5 xФ2max=1,5 xФ 2max .
Instante 180°
Cuando el sistema trifásico avanzó medio ciclo hacia la posición de 180° eléctricos, o sea, 5mseg más tarde y 10mseg desde el instante inicial.
La tensión de la fase L1 vuelve a valer U 1=0V , y tampoco existe el campo magnético Ф1;
La tensión de la fase L2 vale ahora U 2=0,866 x U 2maxV ,Ф2=0,866 xФ2max y es entrante;
La tensión de la fase L3 vale U 3=−0,866 xU 3maxV ,Ф3=0,866 xФ3max y es saliente.
Comprobamos que el campo magnético resultanteФT ahora tiene una posición de 270 °respecto a la vertical es decir dio una media vuelta desde el instante inicial y sigue valiendo ФT=1,5 xФ1max=1,5xФ2max=1,5 xФ2max .
Desplazamiento produciendo por motores de inducciones
Balance de Potencia en motores trifásicos de induccion
Eficiencia de motoro Tipos de motores DCo Modelos circuitales en régimen estable

o Eficiencia Curvas Caracteristicaso Generadores DC