
Motores a Pasos y Servomotores
18
Motores y servomotores Control Eléctrico MI 4209 Grupo 01 Escuela de Ingeniería Electromecánica Carrera de Ingeniería en Mantenimiento Industrial. • Canadian Engineering Accreditation Board • Bureau canadien d’accréditation des programmes d’ingénierie C Carrera evaluada y acreditada por: F. MENESES FERNÁNDEZ, 201021593 P. JIMÉNEZ CECILIANO 200925729 PROF. ING ANA LUCÍA MORERA
-
Upload
pablo-jimenez -
Category
Documents
-
view
39 -
download
5
description
Estudio de motores a pasos y servomotores y control adecuado para su funcionamiento.
Transcript of Motores a Pasos y Servomotores
Motores y servomotores
Control Eléctrico MI 4209
Grupo 01
Escuela de Ingeniería Electromecánica
Carrera de Ingeniería en Mantenimiento Industrial.
• Canadian Engineering Accreditation Board • Bureau canadien d’accréditation des programmes
d’ingénierie C
EAB
Carrera evaluada y
acreditada por:
F. MENESES FERNÁNDEZ, 201021593
P. JIMÉNEZ CECILIANO 200925729
PROF. ING ANA LUCÍA MORERA
I
Contenido Introducción ............................................................................................................ 1 Motor a pasos ......................................................................................................... 2
Características de los motores a paso. ............................................................... 2 Tipos de motores a pasos. .................................................................................. 2 Diferentes maneras de control de los motores a paso. ........................................ 5
Servomotores ......................................................................................................... 9 Clasificación de los servomotores ..................................................................... 13
Servomotores de corriente alterna: ............................................................... 13 Servomotores de corriente continúa: ............................................................. 14 Servomotores de imanes permanentes o Brushless: ..................................... 14
Aplicaciones ...................................................................................................... 14 Control. ............................................................................................................. 14
Bibliografía ........................................................................................................... 16
Tabla 1: Secuencia normal para motor a pasos unipolar. ....................................... 6
Tabla 2: Secuencia tipo wave drive para motor a pasos unipolar. .......................... 7
Tabla 3: Secuencia de medio pasó. ........................................................................ 8
Tabla 4: Secuencia necesaria para control de motores bipolares. ......................... 9
Tabla 5: Clasificación por fabricante ..................................................................... 13
Figura 1: Diferentes conexiones de los motores a pasos unipolares. ..................... 3
Figura 2: Representación de motor a pasos bipolar. ............................................... 4
Figura 3: Cambio de posición al excitar la fase 2. ................................................... 4
Figura 4: Control de motor a pasos. ....................................................................... 5
Figura 5: Servomotor ............................................................................................ 10
Figura 6: posicionamiento de un servomotor ........................................................ 11
Figura 7: engranajes del servomotor .................................................................... 12
Figura 8: estructura de un servomotor .................................................................. 12
Figura 10: Circuito control servo. .......................................................................... 15
1
Introducción
Cuando surge la necesidad de realizar un movimiento preciso y controlado
en la industria se utilizan los motores a pasos y los servomotores con estas
máquinas se logra tener un preciso control en el movimiento, la velocidad y el
torque.
Un motor de avance a pasos es un tipo especial de motor síncrono diseñado
para girar un cierto número específico de grados por cada pulso que recibe de su
unidad de control. (Chapman, 2012).
Un servomotor es un motor eléctrico que cuenta con la característica de ser
controlado en ángulo de giro y velocidad. El control del mismo puede ser tanto
analógico como digital.
2
Motor a pasos
Características de los motores a paso.
Gracias a la exactitud de los motores a pasos estos se utilizan actualmente
para el desarrollo de aplicaciones de alta precisión, debido a la cualidad de moverse
en pequeños intervalos que van desde 1.8° hasta 90°.
Los motores a pasos se definen por los siguientes parámetros básicos:
Voltaje: Generalmente este dato viene impreso en la carcasa o de lo contrario
se especifica en su hoja de datos, algunas veces se debe aplicar una tensión mayor
para obtener un toque deseado sin embargo es sabido que esto causara un
calentamiento excesivo y rápido deterioro del motor.
Resistencia eléctrica: Esta determinara la corriente que consumirá el motor y
su valor afectara la curva de toque de motor y su velocidad máxima de operación.
Grados por paso: Característica más importante de estos motores, este factor
determina la cantidad de grados que rotara el motor para cada paso completo. Si
se cuenta con un motor de 200 pasos, se dice que este posee una resolución de
1,8.
Tipos de motores a pasos.
El motor a pasos está constituido por el estator en donde se encuentran las
bobinas que son excitadas por medio del controlador externo; por otra parte el rotor
usualmente es un imán permanente sin embargo existen motores a pasos con
rotores de reluctancia variable.
Motor de imán permanente: Son los más conocidos, utilizados en máquinas
con avance de papel, cabezales de impresoras por mencionar algunas aplicaciones
comunes. En estos motores el imán permanente aporta el campo magnético en el
rotor para su funcionamiento. A su vez estos motores se dividen en dos tipos
distintos que se diferencian por el tipo de bobinado los unipolares y los bipolares.
3
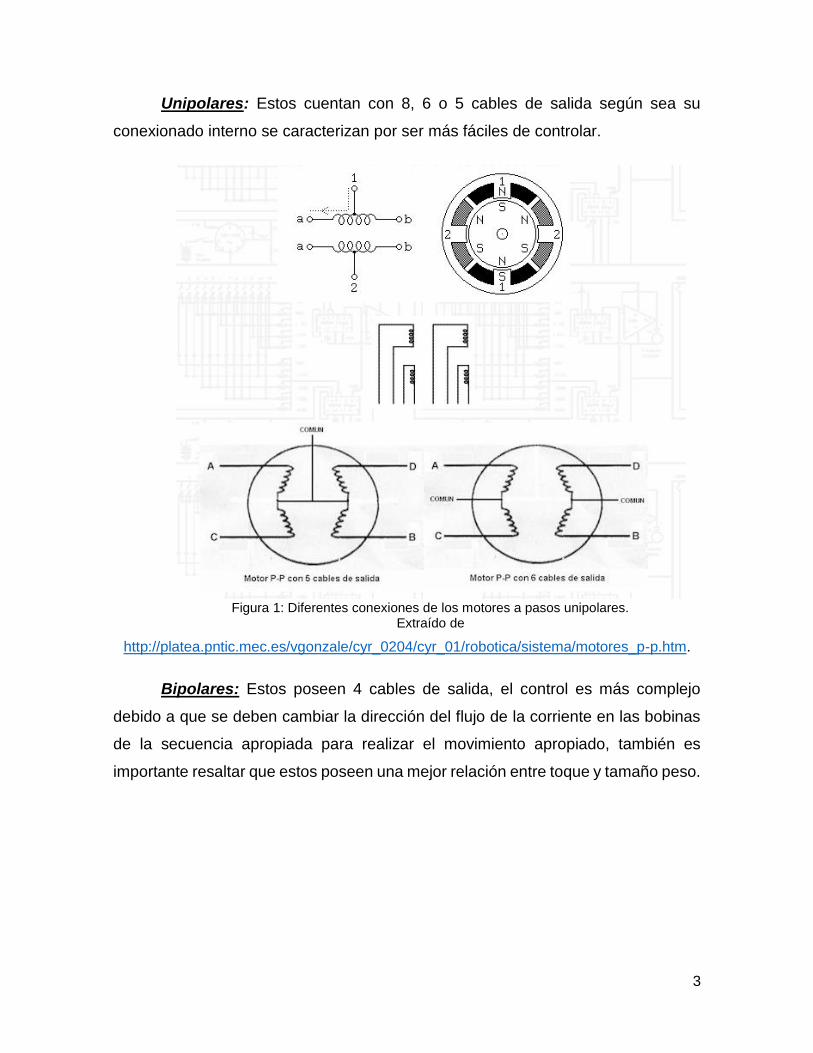
Unipolares: Estos cuentan con 8, 6 o 5 cables de salida según sea su
conexionado interno se caracterizan por ser más fáciles de controlar.
Figura 1: Diferentes conexiones de los motores a pasos unipolares.
Extraído de
http://platea.pntic.mec.es/vgonzale/cyr_0204/cyr_01/robotica/sistema/motores_p-p.htm.
Bipolares: Estos poseen 4 cables de salida, el control es más complejo
debido a que se deben cambiar la dirección del flujo de la corriente en las bobinas
de la secuencia apropiada para realizar el movimiento apropiado, también es
importante resaltar que estos poseen una mejor relación entre toque y tamaño peso.
4
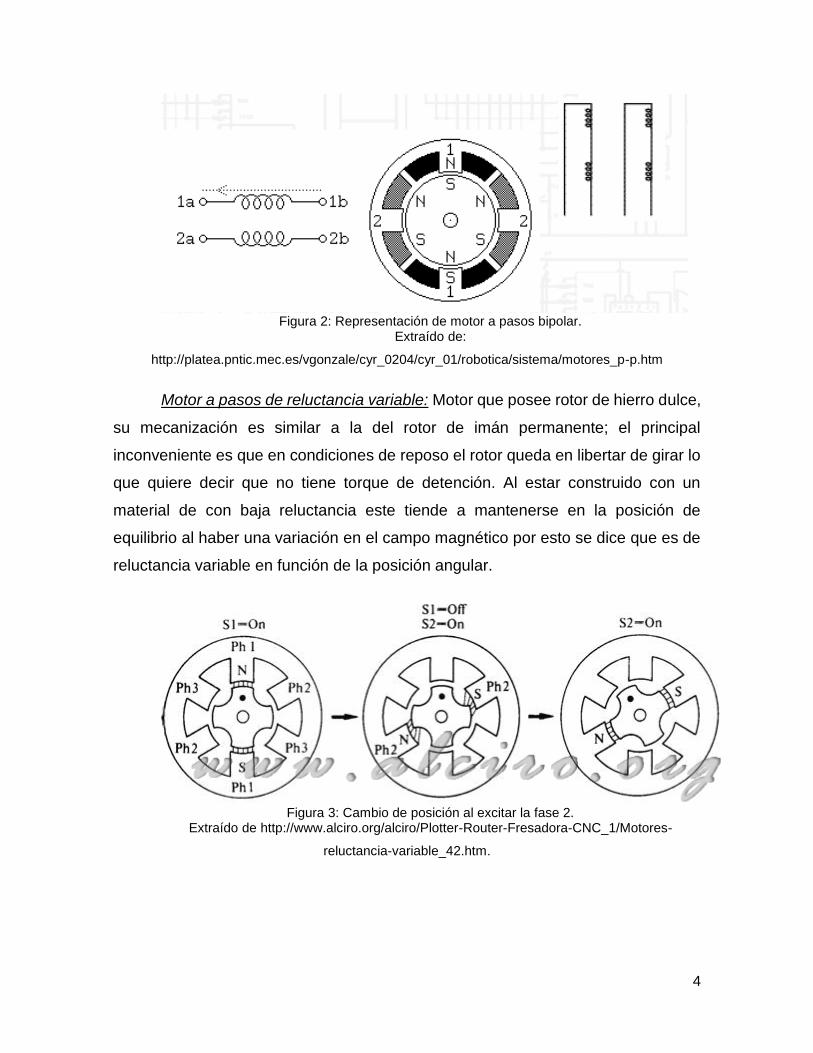
Figura 2: Representación de motor a pasos bipolar.
Extraído de:
http://platea.pntic.mec.es/vgonzale/cyr_0204/cyr_01/robotica/sistema/motores_p-p.htm
Motor a pasos de reluctancia variable: Motor que posee rotor de hierro dulce,
su mecanización es similar a la del rotor de imán permanente; el principal
inconveniente es que en condiciones de reposo el rotor queda en libertar de girar lo
que quiere decir que no tiene torque de detención. Al estar construido con un
material de con baja reluctancia este tiende a mantenerse en la posición de
equilibrio al haber una variación en el campo magnético por esto se dice que es de
reluctancia variable en función de la posición angular.
Figura 3: Cambio de posición al excitar la fase 2.
Extraído de http://www.alciro.org/alciro/Plotter-Router-Fresadora-CNC_1/Motores-
reluctancia-variable_42.htm.
5
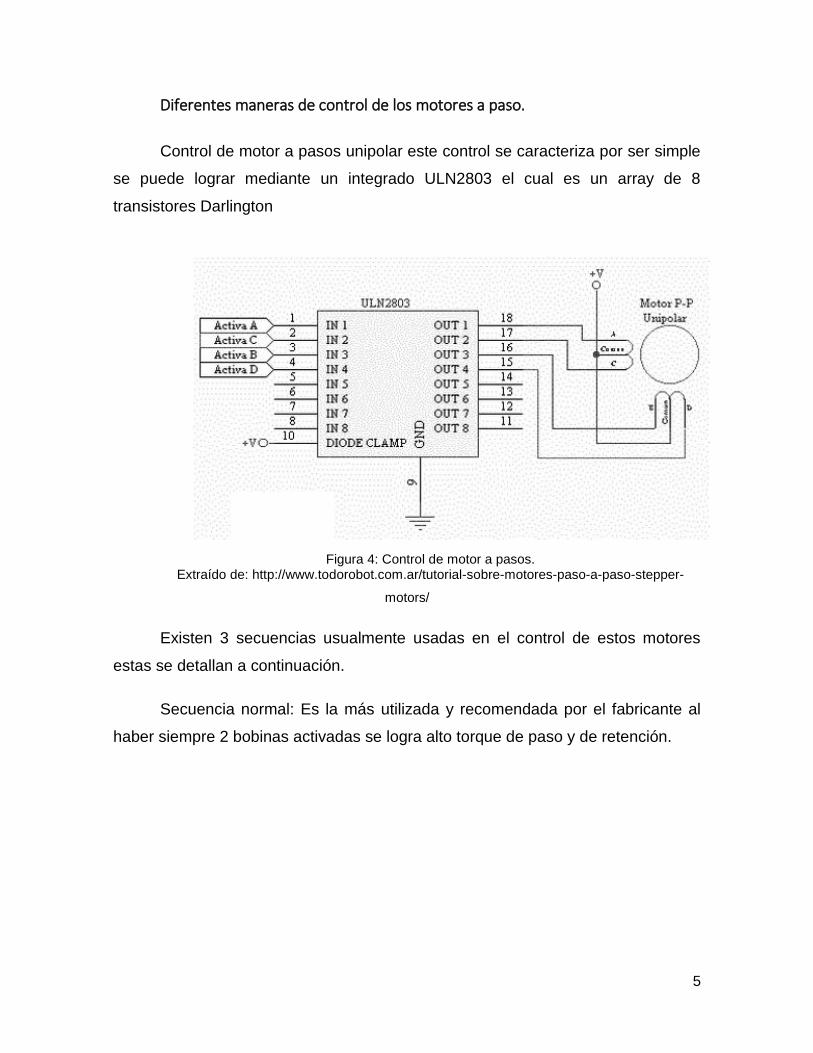
Diferentes maneras de control de los motores a paso.
Control de motor a pasos unipolar este control se caracteriza por ser simple
se puede lograr mediante un integrado ULN2803 el cual es un array de 8
transistores Darlington
Figura 4: Control de motor a pasos.
Extraído de: http://www.todorobot.com.ar/tutorial-sobre-motores-paso-a-paso-stepper-
motors/
Existen 3 secuencias usualmente usadas en el control de estos motores
estas se detallan a continuación.
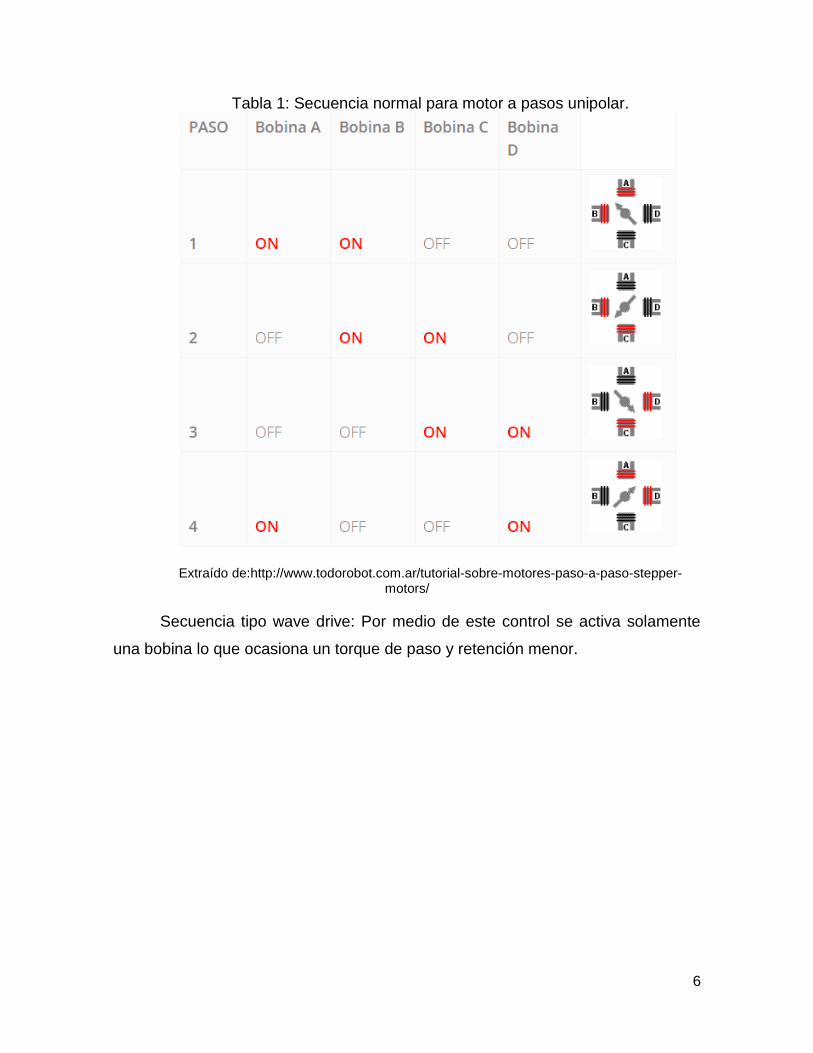
Secuencia normal: Es la más utilizada y recomendada por el fabricante al
haber siempre 2 bobinas activadas se logra alto torque de paso y de retención.
6
Tabla 1: Secuencia normal para motor a pasos unipolar.
Extraído de:http://www.todorobot.com.ar/tutorial-sobre-motores-paso-a-paso-stepper-
motors/
Secuencia tipo wave drive: Por medio de este control se activa solamente
una bobina lo que ocasiona un torque de paso y retención menor.
7
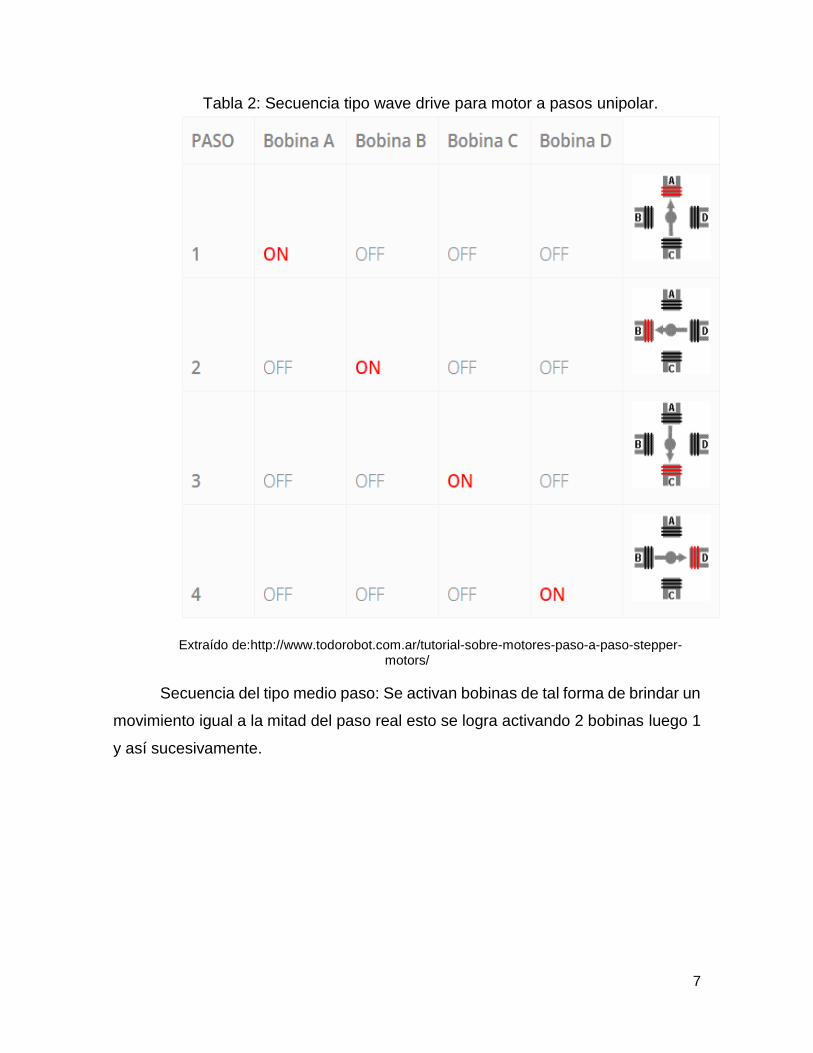
Tabla 2: Secuencia tipo wave drive para motor a pasos unipolar.
Extraído de:http://www.todorobot.com.ar/tutorial-sobre-motores-paso-a-paso-stepper-
motors/
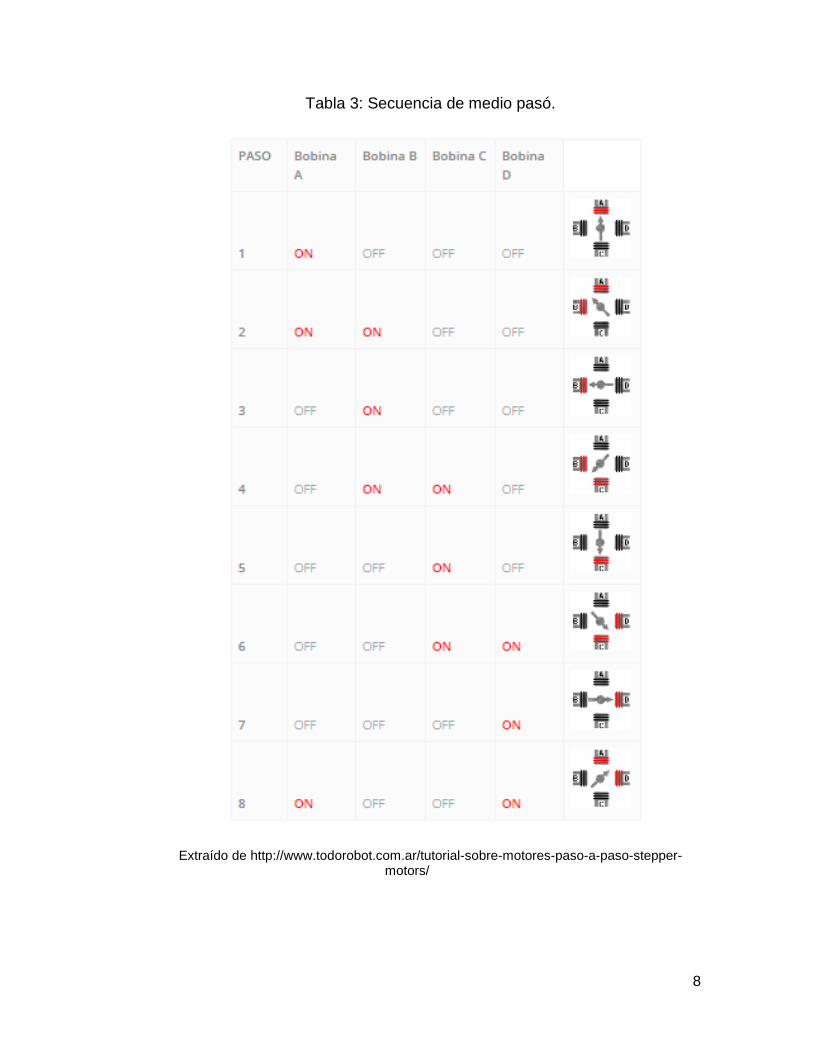
Secuencia del tipo medio paso: Se activan bobinas de tal forma de brindar un
movimiento igual a la mitad del paso real esto se logra activando 2 bobinas luego 1
y así sucesivamente.
8
Tabla 3: Secuencia de medio pasó.
Extraído de http://www.todorobot.com.ar/tutorial-sobre-motores-paso-a-paso-stepper-
motors/
9
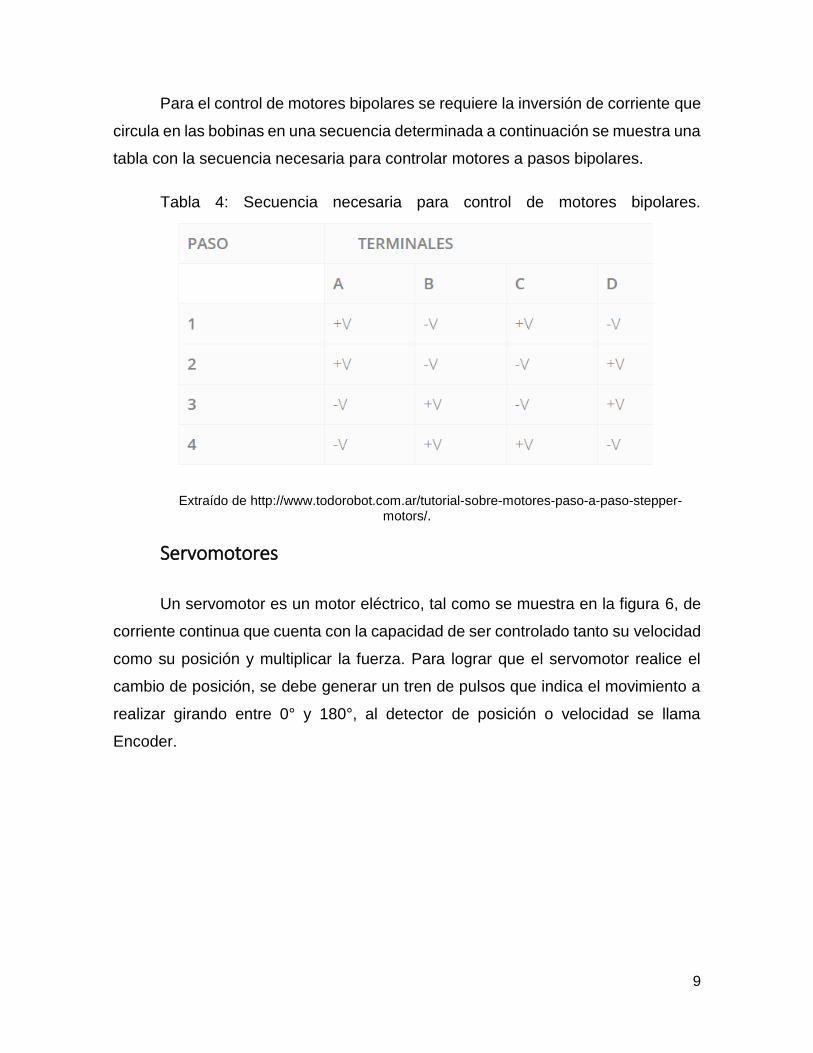
Para el control de motores bipolares se requiere la inversión de corriente que
circula en las bobinas en una secuencia determinada a continuación se muestra una
tabla con la secuencia necesaria para controlar motores a pasos bipolares.
Tabla 4: Secuencia necesaria para control de motores bipolares.
Extraído de http://www.todorobot.com.ar/tutorial-sobre-motores-paso-a-paso-stepper-motors/.
Servomotores
Un servomotor es un motor eléctrico, tal como se muestra en la figura 6, de
corriente continua que cuenta con la capacidad de ser controlado tanto su velocidad
como su posición y multiplicar la fuerza. Para lograr que el servomotor realice el
cambio de posición, se debe generar un tren de pulsos que indica el movimiento a
realizar girando entre 0° y 180°, al detector de posición o velocidad se llama
Encoder.
10
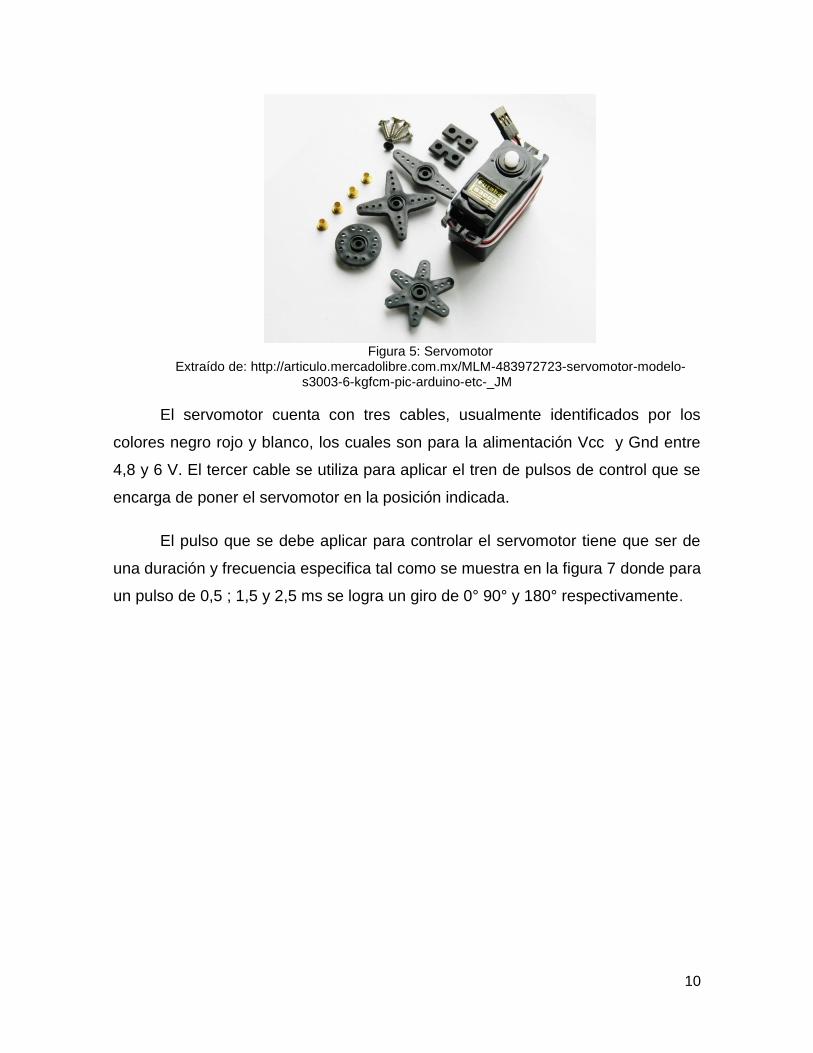
Figura 5: Servomotor
Extraído de: http://articulo.mercadolibre.com.mx/MLM-483972723-servomotor-modelo-s3003-6-kgfcm-pic-arduino-etc-_JM
El servomotor cuenta con tres cables, usualmente identificados por los
colores negro rojo y blanco, los cuales son para la alimentación Vcc y Gnd entre
4,8 y 6 V. El tercer cable se utiliza para aplicar el tren de pulsos de control que se
encarga de poner el servomotor en la posición indicada.
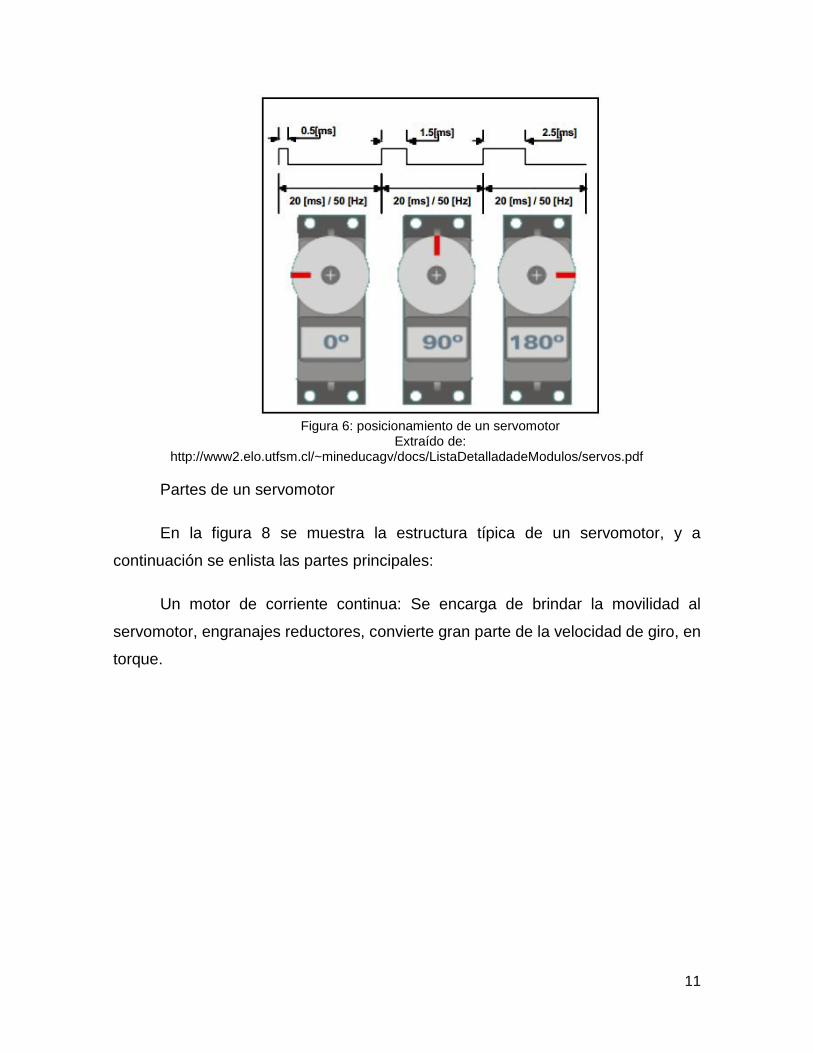
El pulso que se debe aplicar para controlar el servomotor tiene que ser de
una duración y frecuencia especifica tal como se muestra en la figura 7 donde para
un pulso de 0,5 ; 1,5 y 2,5 ms se logra un giro de 0° 90° y 180° respectivamente.
11
Figura 6: posicionamiento de un servomotor
Extraído de: http://www2.elo.utfsm.cl/~mineducagv/docs/ListaDetalladadeModulos/servos.pdf
Partes de un servomotor
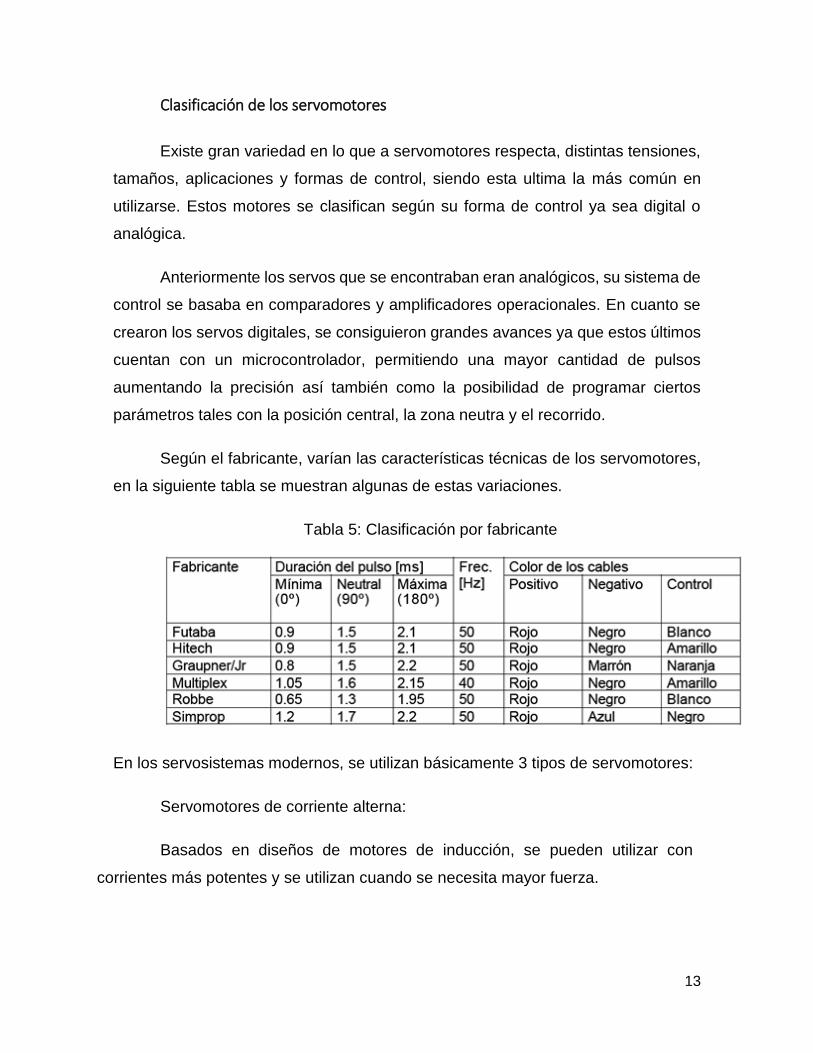
En la figura 8 se muestra la estructura típica de un servomotor, y a
continuación se enlista las partes principales:
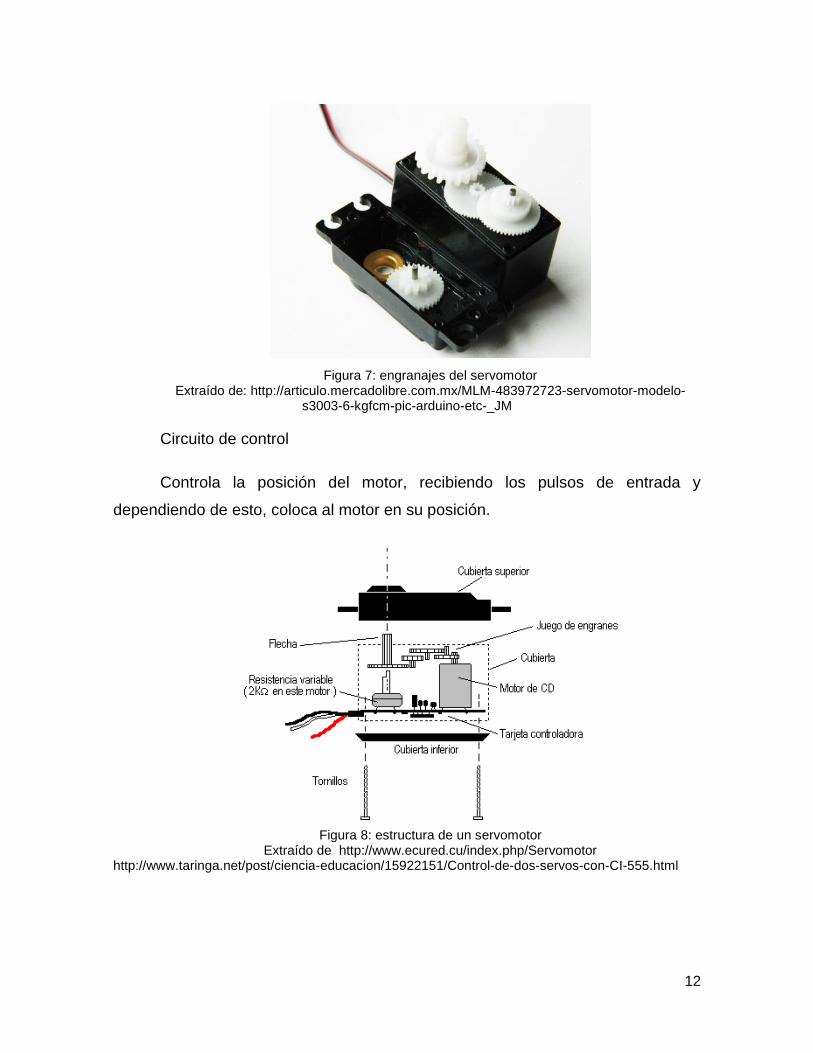
Un motor de corriente continua: Se encarga de brindar la movilidad al
servomotor, engranajes reductores, convierte gran parte de la velocidad de giro, en
torque.
12
Figura 7: engranajes del servomotor
Extraído de: http://articulo.mercadolibre.com.mx/MLM-483972723-servomotor-modelo-s3003-6-kgfcm-pic-arduino-etc-_JM
Circuito de control
Controla la posición del motor, recibiendo los pulsos de entrada y
dependiendo de esto, coloca al motor en su posición.
Figura 8: estructura de un servomotor
Extraído de http://www.ecured.cu/index.php/Servomotor http://www.taringa.net/post/ciencia-educacion/15922151/Control-de-dos-servos-con-CI-555.html
13
Clasificación de los servomotores
Existe gran variedad en lo que a servomotores respecta, distintas tensiones,
tamaños, aplicaciones y formas de control, siendo esta ultima la más común en
utilizarse. Estos motores se clasifican según su forma de control ya sea digital o
analógica.
Anteriormente los servos que se encontraban eran analógicos, su sistema de
control se basaba en comparadores y amplificadores operacionales. En cuanto se
crearon los servos digitales, se consiguieron grandes avances ya que estos últimos
cuentan con un microcontrolador, permitiendo una mayor cantidad de pulsos
aumentando la precisión así también como la posibilidad de programar ciertos
parámetros tales con la posición central, la zona neutra y el recorrido.
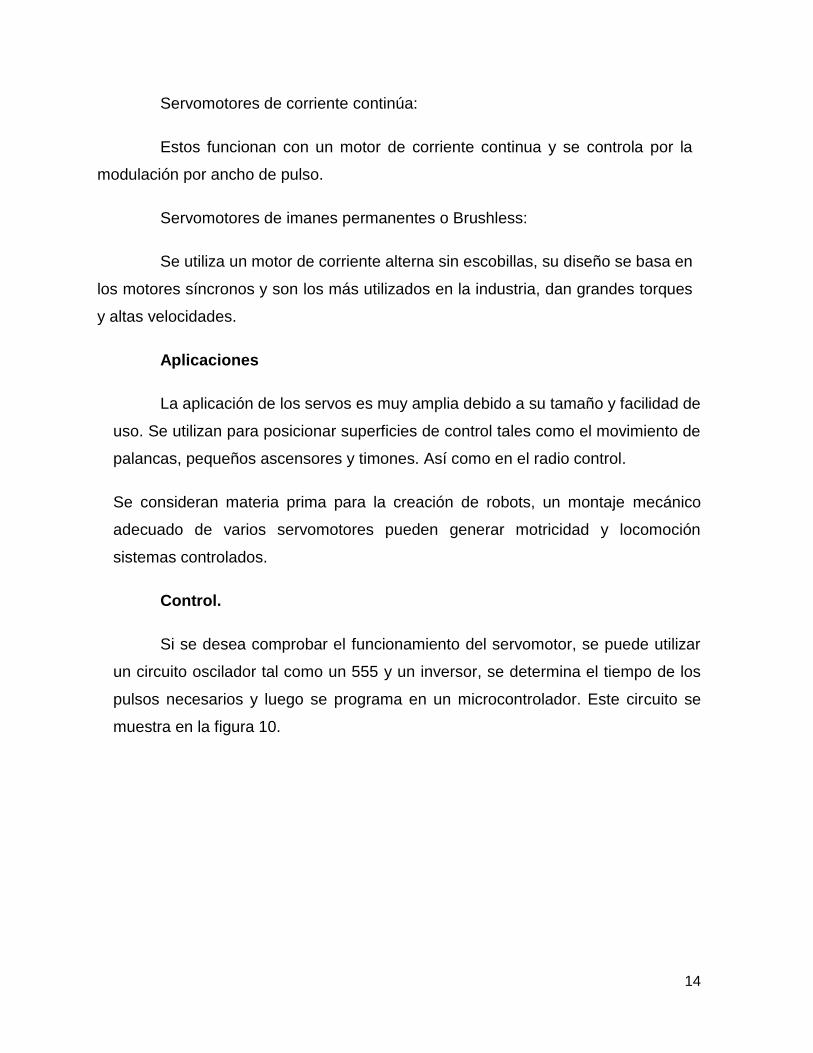
Según el fabricante, varían las características técnicas de los servomotores,
en la siguiente tabla se muestran algunas de estas variaciones.
Tabla 5: Clasificación por fabricante
En los servosistemas modernos, se utilizan básicamente 3 tipos de servomotores:
Servomotores de corriente alterna:
Basados en diseños de motores de inducción, se pueden utilizar con
corrientes más potentes y se utilizan cuando se necesita mayor fuerza.
14
Servomotores de corriente continúa:
Estos funcionan con un motor de corriente continua y se controla por la
modulación por ancho de pulso.
Servomotores de imanes permanentes o Brushless:
Se utiliza un motor de corriente alterna sin escobillas, su diseño se basa en
los motores síncronos y son los más utilizados en la industria, dan grandes torques
y altas velocidades.
Aplicaciones
La aplicación de los servos es muy amplia debido a su tamaño y facilidad de
uso. Se utilizan para posicionar superficies de control tales como el movimiento de
palancas, pequeños ascensores y timones. Así como en el radio control.
Se consideran materia prima para la creación de robots, un montaje mecánico
adecuado de varios servomotores pueden generar motricidad y locomoción
sistemas controlados.
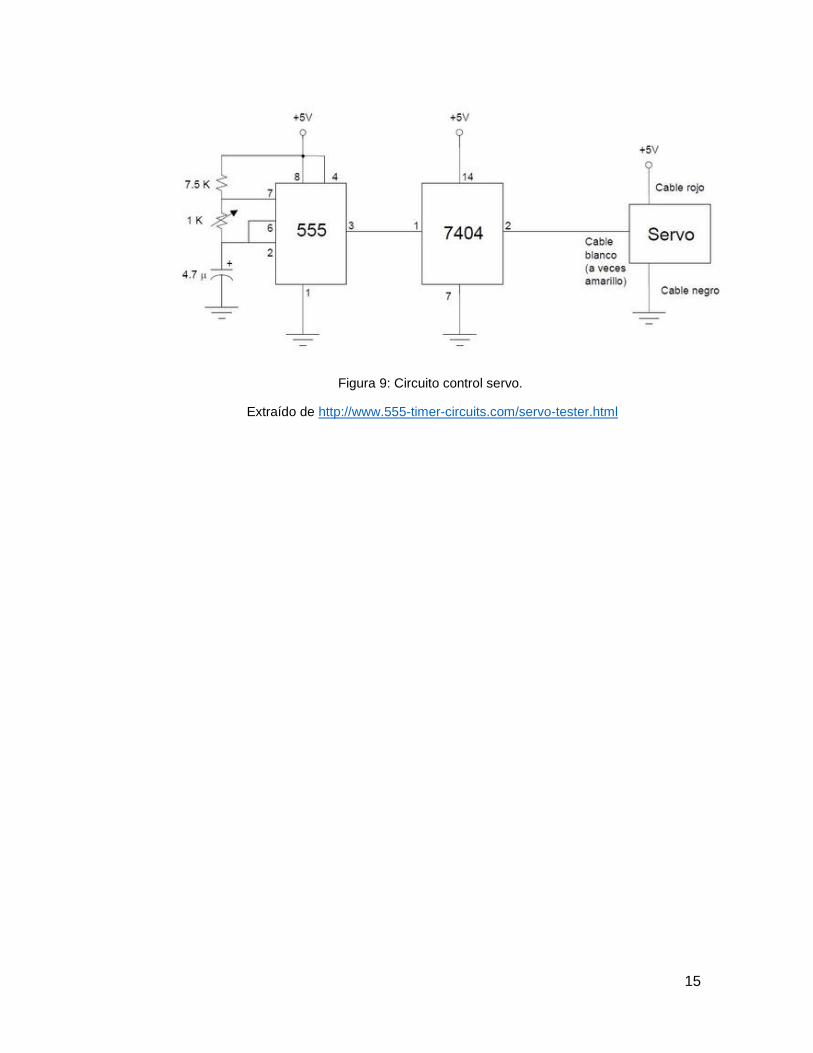
Control.
Si se desea comprobar el funcionamiento del servomotor, se puede utilizar
un circuito oscilador tal como un 555 y un inversor, se determina el tiempo de los
pulsos necesarios y luego se programa en un microcontrolador. Este circuito se
muestra en la figura 10.
15
Figura 9: Circuito control servo.
Extraído de http://www.555-timer-circuits.com/servo-tester.html
16
Bibliografía
Carletti, E. J. (s.f.). Motores paso a paso. Obtenido de http://robots-
argentina.com.ar/MotorPP_basico.htm
Chapman, S. J. (2012). Máquinas Eléctricas. México D.F.: Mc Graw Hill.
EcuRed. (22 de Febrero de 2015). Obtenido de http://www.ecured.cu/index.php/Servomotor
Seccion de motores a pasos. (s.f.). Obtenido de
http://catarina.udlap.mx/u_dl_a/tales/documentos/lep/hernandez_b_ii/capitulo3.pdf
Tutoriales Sobre motores paso a paso. (10 de 9 de 2014). Obtenido de
http://www.todorobot.com.ar/tutorial-sobre-motores-paso-a-paso-stepper-motors/
UTFSM. (diciembre de 2003). Obtenido de
http://www2.elo.utfsm.cl/~mineducagv/docs/ListaDetalladadeModulos/servos.pdf


















