Observabilidad
24
1 Ing. Gabriela Ortiz León Control Automático Observabilidad
description
Variables de Estado
Transcript of Observabilidad

1Ing. Gabriela Ortiz León
Control Automático
Observabilidad

2Ing. Gabriela Ortiz León
Contenido
Observabilidad
Introducción a los observadores de estado
Ejemplos y ejercicios

3Ing. Gabriela Ortiz León
Observabilidad: definiciónPartimos del sistema
se dice que el estado x(t0) es observable si dada cualquier entrada u(t), existe un tiempo finito tf ≥ t0 tal que, el conocimiento de:
u(t) para t0 ≤ t < tf
las matrices A, B, C y D la salida y(t) para t0 ≤ t < tf
sea suficiente para determinar x(t0).
x=Ax (t ) + Bu(t )y (t )=Cx (t ) + Du(t )

4Ing. Gabriela Ortiz León
Observabilidad: definiciónSi cada estado del sistema es observable para un tiempo finito, se dice que el sistema es completamente observable, o simplemente observable.
Para que el sistema descrito sea completamente observable, es necesario y suficiente que S, la matriz de observabilidad de nm x n, tenga un rango n.
S= [CCACA2
⋮
CAn−1]

5Ing. Gabriela Ortiz León
Pruebas para la observabilidad Si el sistema tiene solo una salida, C es una
matriz de reglón de 1 x n y S es una matriz cuadrada de n x n. Entonces, el sistema es completamente observable si S es no singular
Para un sistema SISO, el par [A,C] es completamente observable si A y C están en la forma canónica observable (FCO) o son transformables a la FCO mediante una transformación de similitud.

6Ing. Gabriela Ortiz León
Pruebas para la observabilidad (2) Si A está en la forma canónica diagonal
(FCD) el par [A,C] es completamente observable si todos los elementos en las columnas de C son diferentes de cero.
Si A está en la forma canónica de Jordan (FCJ), el par [A,C] es completamente observable si los elementos en las columnas de C que corresponden al primer renglón de cada bloque de Jordan no son todos cero.

7Ing. Gabriela Ortiz León
Ejemplos de Observabilidad (1)¿Son los siguientes sistemas completamente observables?
x=[−1 00 −2 ] x ; y=[1 3] x
x=[2 1 00 2 10 0 2 ] x ; y=[3 0 0
4 0 0 ] x
x=[2 1 0 0 00 2 1 0 00 0 2 0 00 0 0−3 10 0 0 0 −3
] x ; y= [1 1 1 0 00 1 1 1 0 ] x

8Ing. Gabriela Ortiz León
Ejemplos de Observabilidad (2)¿Son los siguientes sistemas completamente observables?
x=[−1 00 −2 ] x ; y=[0 1] x
x=[2 1 00 2 10 0 2 ] x ; y=[0 1 3
0 2 4 ] x
x=[2 1 0 0 00 2 1 0 00 0 2 0 00 0 0−3 10 0 0 0 −3
] x ; y= [1 1 1 0 00 1 1 0 0 ] x

9Ing. Gabriela Ortiz León
Observabilidad a partir de G(s)o G(z)
Si la función de transferencia entrada-salida de un sistema lineal tiene cancelación de polos y ceros, el sistema será o no observable dependiendo de cómo se definan las variables de estado.
Si la función de transferencia entrada-salida NO tiene cancelación de polos y ceros, el sistema siempre se puede representar mediante las ecuaciones dinámicas como un sistema totalmente observable.

10Ing. Gabriela Ortiz León
Ejemplo 3Sea la función de transferencia
Se descompone en la forma FCC
Cuya matriz de observabilidad, S, es singular y por ello el par [A,C] no es observable
Y ( s)U (s)
=s+1
(s+1)( s+2)
A=[ 0 1−2 −3 ]
B=[01 ]C=[1 1 ]
S=[ CCA ]= [ 1 1−2 −2 ]

11Ing. Gabriela Ortiz León
Ejemplo 3: continuaciónEl sistema se representa en la forma FCO
Debido a que la FCO se puede realizar, el par [A, C] es observable
A=[0−21−3 ]B=[11 ]C=[0 1 ]

12Ing. Gabriela Ortiz León
Controlabilidad y Observabilidad de sistemas en lazo cerrado con
realimentación de estado
Controlabilidad Si es x(t)=Ax(t) + Bu(t) es completamente
controlable, entonces si :
u(t)=r(t)−Kx(t)el sistema en lazo cerrado con realimentación de estado es:
x(t)=(A-BK)x(t) + Br(t)
y es también completamente controlable
•
•

13Ing. Gabriela Ortiz León
Controlabilidad y Observabilidad de sistemas en lazo cerrado con
realimentación de estado
Observabilidad Si el sistema a lazo abierto es controlable y
observable, la realimentación de estado puede destruir la observabilidad
Es decir, la observabilidad a lazo abierto y lazo cerrado no están relacionadas
14Ing. Gabriela Ortiz León
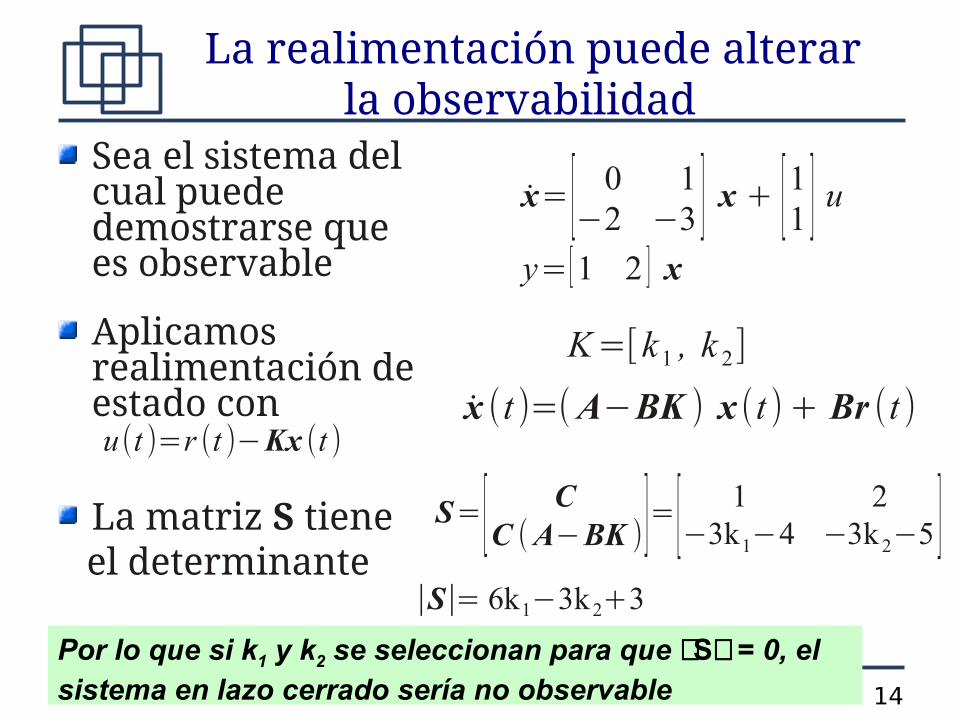
La realimentación puede alterarla observabilidad
Sea el sistema del cual puede demostrarse que es observable
Aplicamos realimentación de estado con
La matriz S tiene el determinante
x= [ 0 1−2 −3 ] x + [11 ] u
y=[1 2 ] x
u(t )=r (t )−Kx (t )
K=[k1 , k 2]
x (t )=(A−BK ) x (t )+ Br (t )
S= [ CC (A−BK )]=[ 1 2
−3k1−4 −3k2−5 ]∣S∣= 6k1−3k2+3
Por lo que si k1 y k2 se seleccionan para que S = 0, el sistema en lazo cerrado sería no observable

15Ing. Gabriela Ortiz León
Observabilidad en tiempo discreto
Partimos del sistema
Para que este sistema sea observable la matriz de nm x n debe tener rango n
x ( (k+1) T )=Ad x (kT ) + Bd u(kT )
y (kT )=Cx (kT ) + Du (kT )
S= [CCAdCAd
2
⋮
CAdn−1 ]

16Ing. Gabriela Ortiz León
Ejercicio 2
Encuentre si el sistema es observable
x (k+1)= [1,65 −0,6751 0 ] x (k ) + [10 ] u(k )
y (k )=[1 0,825 ] x (k ) T =0,01 s

17Ing. Gabriela Ortiz León
Transformación a FCO
Sea Q la matriz de transformación, con S la matriz de observabilidad
Y con
Q=(WS )−1
W= [a1 a2 ⋯ an−1 1a2 a3 ⋯ 1 0⋮ ⋮ ⋮ ⋮
an−1 1 ⋯ 0 01 0 ⋯ 0 0
]

18Ing. Gabriela Ortiz León
Transformación a FCOSe define como un nuevo vector de estado
Si el sistema es observable, la matriz Q tiene inversa.
Utilizando la matriz Q se puede transformar el sistema a la forma canónica observable:
xx=Q x
˙x=Q−1AQ x + Q−1Buy=CQ x + Du

19Ing. Gabriela Ortiz León
Los elementos de las matrices y no están restringidos a ninguna forma especial
La forma canónica observable
A= [0 0 ⋯ 0 −a01 0 ⋯ 0 −a10 1 ⋯ 0 −a2⋮ ⋮ ⋮ ⋮0 0 ⋯ 1 −an−1
]C=[0 0 ⋯ 0 1 ]
B D

20Ing. Gabriela Ortiz León
No siempre es posible medir el estado x
A veces es necesario estimar las variables de estado no medibles a partir de las variables de salida y de las variables de control
Observadores de estado

21Ing. Gabriela Ortiz León
Ejercicios
1. Encuentre si el sistema discreto mostrado, con T = 0.01s, es controlable y observable.
2. Haga que el sistema tenga los polos de lazo cerrado en µ = 0.6 +/- 0.25j y que tenga error de estado estacionario cero ante un escalón en la entrada r(k)
x (k+1)=[ 0,9319 −0,024140,03863 0,99951 ] x (k ) + [ 0,019310,0003908 ] u
y (k )= [0 1,25 ] x (k )

22Ing. Gabriela Ortiz León
Ejercicios (2)3. Considere el sistema de orden 3 y utilizando
Ackerman, ubique los polos en µ1,2 = -1 +/- j y en µ3 = -7. Haga cero el error ante una entrada escalón en r(t)
4. Resuelva los ejercicios utilizando las funciones acker y place de Matlab. ¿Cuál es la diferencia entre ambas? ¿Cuál es más recomendable?
x= [0 1−22 0 00 1 0 ] x + [
0,500 ] u
y=[0 0 1 ] x

23Ing. Gabriela Ortiz León
Ejercicios (3)5. Encuentre si el sistema mostrado es
observable
6. Calcule la controlabilidad y observabilidad utilizando las funciones ctrb y obsv de Matlab.
7. Examine la ayuda de Matlab para la función canon. ¿Cuál es la diferencia entre la matriz T de Matlab y la matriz Q descrita aquí?
x=[0 1−22 0 00 1 0 ] x + [
0,500 ] u
y=[0 0 1 ] x

24Ing. Gabriela Ortiz León
Referencias[1] Kuo, Benjamin. „Sistemas de Control
Automático“,Pearson, Prentice-Hall, 1996,7ª edición, México
[2] Ogata, Katsuhiko. „Ingeniería de Control Moderna“, Pearson, Prentice Hall, 2003, 4ª Ed., Madrid.
[3] Ogata, Katsuhiko. „Sistemas de Control en tiempo discreto“, Prentice Hall, 1996, 2ª Ed., México.















![Tema 9 Espacio de Estados [Modo de compatibilidad]control-class.com/Tema_9/Slides/Tema_9_Espacio_de...Controlabilidad y Observabilidad • Conceptos debidos a Kalman y claves a la](https://static.fdocumento.com/doc/165x107/5ad890ab7f8b9a865b8d8e3e/tema-9-espacio-de-estados-modo-de-compatibilidadcontrol-classcomtema9slidestema9espaciodecontrolabilidad.jpg)

