Obtención del modelo de elementos finitos...
43
49 Capítulo 4: Obtención del modelo de elementos finitos (EF) 4.1.- Introducción En este capítulo vamos a desarrollar el modelo de elementos finitos que se creará en ANSYS y que posteriormente se resolverá en ABAQUS con el fin de simular el ensayo de arrancamiento de arpones. Dicha simulación nos dará una serie de resultados numéricos que, al compararlos con los resultados experimentales, nos permitirán obtener las propiedades del hueso, tanto del cortical como del trabecular, ya que hasta el momento tan sólo hemos hablado de rigidez global, y lo más importante, conseguir el objetivo final de este proyecto fin de carrera, que es la simulación del ensayo de arrancamiento de arpones de sutura en húmeros humanos. Para ello, tendremos que obtener la geometría del arpón SMITH&NEPHEW y la del húmero H1, que son los que se han elegido para el desarrollo de este proyecto y sobre los que se han estudiado los ensayos realizados. Una vez que se conozca la geometría y se haya realizado el modelo correspondiente, tendremos que insertar el arpón en la posición A del húmero H1 tal y como se hizo en el ensayo real. Para finalizar se realizará el mallado del sistema completo controlando que el número de elementos resultantes sea el adecuado para que los resultados obtenidos sean fiables y para que, además, el gasto computacional no sea excesivo, ya que serán muchas las simulaciones que tendremos que realizar para obtener los resultados deseados. Dada la complicación que tiene obtener el modelo del sistema completo formado por húmero-arpón, se creará en primer lugar un modelo simplificado formado por un prisma de hueso en el que se ha insertado el arpón. Este modelo simplificado nos servirá, por un lado, para depurar la subrutina de material de usuario (UMAT) que emplearemos para definir las propiedades del hueso cuando estemos resolviendo en ABAQUS, y por otro lado, para tener una referencia del gasto computacional que vamos a tener en función al número de elementos del modelo. Una vez hecho esto, pasaremos a modelar el sistema completo, comentado todas y cada una de las etapas que se han llevado a cabo.
Transcript of Obtención del modelo de elementos finitos...

49
Capítulo 4:
Obtención del modelo de elementos finitos (EF)
4.1.- Introducción
En este capítulo vamos a desarrollar el modelo de elementos finitos que se creará en ANSYS y que posteriormente se resolverá en ABAQUS con el fin de simular el ensayo de arrancamiento de arpones. Dicha simulación nos dará una serie de resultados numéricos que, al compararlos con los resultados experimentales, nos permitirán obtener las propiedades del hueso, tanto del cortical como del trabecular, ya que hasta el momento tan sólo hemos hablado de rigidez global, y lo más importante, conseguir el objetivo final de este proyecto fin de carrera, que es la simulación del ensayo de arrancamiento de arpones de sutura en húmeros humanos.
Para ello, tendremos que obtener la geometría del arpón SMITH&NEPHEW y la del húmero H1, que son los que se han elegido para el desarrollo de este proyecto y sobre los que se han estudiado los ensayos realizados. Una vez que se conozca la geometría y se haya realizado el modelo correspondiente, tendremos que insertar el arpón en la posición A del húmero H1 tal y como se hizo en el ensayo real. Para finalizar se realizará el mallado del sistema completo controlando que el número de elementos resultantes sea el adecuado para que los resultados obtenidos sean fiables y para que, además, el gasto computacional no sea excesivo, ya que serán muchas las simulaciones que tendremos que realizar para obtener los resultados deseados.
Dada la complicación que tiene obtener el modelo del sistema completo formado por húmero-arpón, se creará en primer lugar un modelo simplificado formado por un prisma de hueso en el que se ha insertado el arpón. Este modelo simplificado nos servirá, por un lado, para depurar la subrutina de material de usuario (UMAT) que emplearemos para definir las propiedades del hueso cuando estemos resolviendo en ABAQUS, y por otro lado, para tener una referencia del gasto computacional que vamos a tener en función al número de elementos del modelo. Una vez hecho esto, pasaremos a modelar el sistema completo, comentado todas y cada una de las etapas que se han llevado a cabo.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 50
En ambos casos también se desarrollará el modelo resultante en ABAQUS una vez que se exporte la malla desde ANSYS. Dichos modelos requieren la programación de un archivo *.INP que nos defina en ABAQUS la geometría y las condiciones de contorno necesarias para que el sistema resultantes reproduzca las mismas condiciones que había en el ensayo real.
Comentado todo esto, pasamos a desarrollar cada uno de los modelos comentados, comentando en cada caso los detalles de mayor importancia. Todos los comandos que se van a emplear en ANSYS se detallan en el ANEXO II de esta memoria, distinguiendo tres apartados, uno por cada modelo desarrollado. Análogamente, en el ANEXO III podremos encontrar los archivos *.INP correspondientes a los modelos simplificado y final en ABAQUS.
4.2.- Modelado del arpón SMITH&NEPHEW
4.2.1.- Obtención de la geometría
Al realizar un modelo de elementos finitos lo primero que hay que conocer son las dimensiones exactas de aquello que se pretende modelar. Por tanto, el primer paso será conocer el arpón in situ y realizar una medición adecuada del mismo.
Una primera visión del tipo de arpón que comercializa SMITH&NEPHEW la recogemos en la siguiente imagen (Fig. 4.1), donde podemos apreciar dos modelos distintos. Por un lado tenemos el modelo
TWINFIX AB bioabsorbable (el de la izquierda), y por otro, tenemos el modelo TWINFIX ultrabraid de titanio (el de la derecha), ambos disponibles en varios tamaños (3.5, 5.0 y 6.5 mm). En nuestro caso vamos a modelar el primero de ellos, que es el que se ha empleado en los ensayos contemplados en este proyecto, cuyas especificaciones técnicas son:
ESPECIFICACIONES TÉCNICAS DEL ARPÓN A MODELAR Fabricante Tipo Tamaño Composición
SMITH & NEPHEW TWINFIX AB bioabsorbable 5 mm Poli L- Láctida
Tabla 4.1: Especificaciones técnicas del arpón SMITH&NEPHEW
Fig. 4.1-a: Arpones TWINFIX comercializados por SMITH&NEPHEW

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 51
Fig. 4.1-b: Arpones TWINFIX comercializados por SMITH&NEPHEW (uno recién arrancado)
Pues bien, dadas las dimensiones tan pequeñas que tienen este tipo de arpones de sutura, no podremos usar los métodos convencionales de medición sino que tendremos que utilizar otro tipo de sistema de medición más específico. En nuestro caso nos servimos de la colaboración con el Centro Andaluz de Metrología (CAM), con sede en los laboratorios de la Escuela Superior de Ingenieros de Sevilla y dispone de varias acreditaciones ENAC, para realizar las mediciones del arpón. Esto nos ha permitido obtener la geometría del arpón con todo lujo de detalle.
Una vez conocidas las dimensiones, se realizó un esquema acotado con todo detalle del arpón apoyándonos en la aplicación gráfica que nos ofrece el programa SMARTSKETCH. A continuación se muestra dicho esquema (Fig. 4.2), estando todas las cotas definidas en milímetros.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 52
Ø 0,842
12,033
2,982
1,213 2,921 2,924
1,451 1,028
R0,125
R 0,05
0,217 2,338
16,085
14,371
7,65
Ø 4,978
Ø 4,89
Ø 3,99
Ø 2,982
138,366°
Fig. 4.2: Esquema acotado del arpón TWINFIX bioabsorbable de 5 mm

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 53
4.2.2.- Modelado del arpón
Conocidas las dimensiones del arpón y con la ayuda del correspondiente esquema acotado (Fig. 4.2), pasamos a crear el modelo en ANSYS. A continuación se detallan todos y los pasos seguidos para el modelado del arpón, no obstante, todos los comandos de ANSYS que vamos a emplear para llevarlo a cabo, se pueden encontrar en el primer apartado del ANEXO II, de ahí que no se haga mención a ellos en las líneas que siguen.
Como se ha podido observar anteriormente el arpón tiene una clara simetría de revolución, por lo que se podrá obtener fácilmente su geometría sin más que crear la superficie correspondiente a la mitad superior del perfil representado en la Fig. 4.2, y revolucionar dicha superficie alrededor del eje de simetría.
Para realizar todo esto en ANSYS, se han definido una serie de keypoints de tal manera que, al unirlos por rectas, nos den la superficie deseada.
Fig. 4.3: Diseño del perfil de la mitad superior del arpón SMITH&NEPHEW
Para suavizar los picos que se observan en la imagen anterior, tenemos que imponer el radio de acuerdo correspondiente entre las dos rectas que lo forman (detallado todo en el esquema de la Fig. 4.2). Esta característica geométrica evita que al insertar el arpón en el hueso se cree una concentración de tensiones que nos falsee los resultados.
El sistema de coordenadas empelado ha sido el cartesiano XYZ y, tal y como podemos ver en la Fig. 4.3, se ha tomado la referencia del mismo (el origen de coordenadas) en la punta del arpón. Esto nos servirá posteriormente para, una vez tengamos modelado el arpón, poder situarlo en la posición y profundidad deseada del hueso en cuestión sin mucha dificultad.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 54
Al imponer los correspondientes radios de acuerdo y condensar la numeración de nodos y líneas para así controlar la numeración de cada uno de ellos, obtenemos una línea cerrada con la forma exacta de la mitad superior del perfil del arpón. A partir de esa línea cerrada creamos la superficie correspondiente, tal y como se observa en la siguiente figura.
Fig. 4.4: Superficie patrón que al revolucionarla nos da el volumen del arpón SMITH&NEPHEW
Una vez definida ‘la superficie patrón’ definida en la figura anterior, se revolucionará alrededor del eje de simetría (eje X) con el fin de obtener el volumen final del arpón. Dicho eje de revolución hay que definirlo para poder completar la operación, lo cual se hace a partir de los dos keypoints que lo definen, el 1 y el 28 que podemos ver en la fig. 4.3. No obstante, antes de hacer la revolución, tenemos que elegir el número de partes en las que se dividirá el futuro volumen ya que este aspecto nos afectará en el tratamiento posterior que se haga del modelo del arpón. Para evitar complicaciones con el tamaño y la conexión de los elementos, se ha dispuesto que el volumen final quede divido en tan sólo 4 partes.
A la vista de la superficie patrón comprobamos que, si hacemos la revolución de dicha superficie, el modelo de elementos finitos que obtendremos no tendrá los agujeros por los que se introduce el hilo que impone el desplazamiento al sistema, ya que no se ha tenido en cuenta el hueco correspondiente. Esto no supone ningún problema para nosotros, al contrario, porque nos ahorramos el tener que modelar los agujeros y la ranura por donde va el hilo. Esto es así porque ahora la imposición de los desplazamientos se modela como una determinada condición de contorno para los nodos que se encuentran en ‘el cilindro’ que ahora tenemos en el lugar del agujero (resaltado en la Fig. 4.5).
Fig. 4.5: Zona correspondiente a los nodos que ocupan el lugar del agujero del arpón

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 55
A continuación se muestran varias imágenes que nos describen cómo queda el modelo final del arpón. En primer lugar (Fig. 4.6) vemos el arpón de perfil, donde podemos apreciar las roscas que se han formado al revolucionar ‘la superficie patrón’. Asimismo, observamos los 4 tipos de filetes que tenemos en el arpón, el primero y el último que son únicos, y el resto que se divide en otros dos tipos.
Fig. 4.6: Vista lateral del modelo del arpón SMITH&NEPHEW.
Por otro lado, si representamos el modelo del arpón visto frontalmente podemos distinguir las 4 partes en las que se ha dividido el volumen obtenido por revolución. También vemos la disposición del sistema de coordenadas en la punta del arpón.
Fig. 4.7: Vista frontal del modelo del arpón SMITH&NEPHEW.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 56
En la siguiente imagen se muestran ¾ del arpón, haciendo referencia al hecho de que se ha definido el volumen del mismo a partir de cuatro volúmenes idénticos. Nótese también que el eje de simetría alrededor del cual se revolucionó ‘la superficie patrón’ coincide con el eje X del sistema de coordenadas elegido.
Fig. 4.8: Representación de los ¾ del volumen del arpón SMITH&NEPHEW.
Finalmente ofrecemos una vista en perspectiva del modelo final del arpón, donde se pueden apreciar todas y cada una de las características comentadas anteriormente.
Fig. 4.9: Vista perspectiva del modelo del arpón SMITH&NEPHEW.
Con esto hemos finalizado con el modelado del arpón. Para finalizar con el modelo de elementos finitos tan sólo queda realizar un mallado adecuado que nos permita obtener unos resultados válidos para el estudio que estamos realizando.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 57
4.2.3.- Mallado del arpón
El mallado del arpón dependerá casi exclusivamente del hueso en el que se vaya a insertar ya que, según estemos en uno u otro caso, el proceso de mallado será totalmente diferente. Por tanto, sería más acertado hablar del mallado del ‘modelo completo’ que del modelo del arpón; refiriéndonos por ‘modelo completo’ al sistema formado por el arpón insertado en el hueso en cuestión. De ahí que distingamos el mallado en función al tipo de hueso que se estudie.
En el caso del prisma de hueso, el mallado del sistema completo lo realizaremos en ANSYS, aunque se diferenciará según estemos mallando el arpón o el hueso. Las mallas que se emplearán en este caso se podrán adaptar fácilmente, según nos interese, para que el número y/o el tamaño de los elementos resultantes sea el deseado.
En cambio, para mallar el modelo final donde ya tenemos el arpón insertado en la posición A del húmero H1, no tendremos tanta facilidad para realizar el mallado. En este caso no podemos usar el mallado de ANSYS por la complejidad que tiene la geometría del modelo, tendremos que emplear un módulo especializado de ANSYS tanto para modelar como para mallar el sistema, llamado ANSYS ICEM, en el que todas las opciones de mallado van dirigidas exclusivamente al tamaño y a la distribución de los elementos de cada una de las partes en que se haya dividido la geometría del modelo.
Por todo ello en este apartado no se comentará nada acerca del mallado del arpón sino que, en los siguientes apartados, se desarrollará el mallado que se ha realizado del modelo completo según estemos en el caso simplificado (con el prisma de hueso) o en el real (con el húmero real).

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 58
4.3.- Modelo simplificado: ARPÓN INSERTADO EN PRISMA DE HUESO
4.3.1.- Obtención de la geometría
En este caso se pretende modelar un prisma de hueso de base cuadrada, en el que se insertará el arpón modelado en el apartado anterior, con unas dimensiones arbitrarias que se elegirán según nos convenga, ya que estamos planteando un modelo ficticio que no tendrá mayor interés que el comentado en la introducción, depurar la subrutina de material de usuario y hacer una estimación del gasto computacional que tendremos en función al número de elementos que tengamos.
A grandes rasgos, la geometría del prisma deberá ser tal que cubra al arpón por todos sitios. Para ello, insertaremos el arpón en el centro de la base superior del prisma y a una profundidad tal que el extremo de la cola del arpón quede a ras de la superficie exterior del prisma. En la siguiente imagen se puede apreciar la disposición geométrica del arpón una vez insertado en el hueso.
Fig. 4.10: Esquema aproximado del modelo simplificado ‘prisma de hueso-arpón’
Las dimensiones elegidas para el prisma de hueso han sido 10x10x30 mm, es decir, una base de 10x10 mm y una altura de 30 mm. Dicha elección ha sido totalmente arbitraria, no responde a ningún criterio de diseño. Tan sólo se ha intentado que la altura del prisma sea suficiente como para que la base quede relativamente lejos de la punta del arpón, ya que el pico de ésta introduce una pequeña concentración de tensiones en el sistema que nos podría traer algún problema en la lectura de los resultados. Un criterio similar a éste se ha tomado para elegir la anchura del prisma, se ha elegido una distancia representativa equivalente al doble del diámetro del arpón para que las tensiones en la superficie exterior sean bastante menores que en las crestas creadas por los filetes del arpón.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 59
4.3.2.- Modelado del sistema simplificado
Para el modelado de este sistema simplificado vamos a partir del modelo del arpón desarrollado en el apartado anterior y, al igual que se comentó entonces, todos los comandos de ANSYS que se van a emplear para obtener el modelo se encuentran en el ANEXO II de este proyecto, ésta vez en el segundo apartado.
Si recordamos, cuando se modeló el arpón, el sistema de referencia se tomó en la punta del mismo con el fin de facilitarnos la operación de inserción del arpón hasta una profundidad determinada. Pues bien, para que el extremo de la cola del arpón quede a ras del hueso, tenemos que crear la base superior del prisma a una distancia ‘x’ del origen del sistema de referencia igual a la longitud del arpón, y la base inferior a una distancia equivalente a ‘menos la diferencia’ entre la altura total del prisma y la longitud del arpón.
Para llevar a cabo todo esto en ANSYS se parte del modelo del arpón que ya tenemos definido. A partir de ahí, se ha define el plano intermedio del prisma que corta longitudinalmente al arpón por la mitad y se extruye la distancia necesaria para obtener las dimensiones exactas del prisma. Se han definido 6 keypoints con las coordenadas correspondientes para que el plano creado tenga las dimensiones exactas de 30x10 mm (resaltados en rojo en la Fig. 4.11), y se han unido por rectas hasta formar el plano en cuestión. Como podemos ver en la siguiente figura, dicho plano se ha divido por la mitad con el fin de que al realizar la extrusión, se mantengan los cuatro cuadrantes que ya tenía el arpón.
Fig. 4.11: Diseño del plano intermedio del prisma de hueso
Una vez tenemos el plano definido por líneas, creamos a partir de ellas las áreas correspondientes. En la Fig. 4.12 podemos comprobar que el plano que se ha creado corta longitudinalmente al arpón. Como se ha comentado antes, el volumen final del prisma se obtendrá por extrusión, y para ello emplearemos la opción de ANSYS ‘extrude along normal’ que consiste en extruir la sección definida una determinada distancia en la dirección perpendicular a la misma. En nuestro caso, la extrusión será a lo largo del eje Y por una distancia de ±5 mm ya que teníamos una anchura de 10 mm. En la Fig. 4.13 vemos el resultado de realizar la extrusión de la sección rectangular.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 60
Fig. 4.12: Plano intermedio del prisma de hueso cortando longitudinalmente al arpón
Fig. 4.13: Prisma de hueso macizo obtenido por extrusión
Llegados a este punto lo que tenemos es, de un lado, el arpón tal y como se definió en el apartado 4.2 y, por otro, un prisma de hueso macizo con las dimensiones elegidas, como si de dos volúmenes independientes se tratase. Pero esto no es lo que pretendemos modelar, lo que buscamos es un único volumen como resultado de insertar el arpón en el prisma de hueso. Para ello tendremos que quitarle al prisma de hueso el volumen que ocupa el arpón, de manera que nos quede, de una parte el prisma con el hueco creado por la inserción del arpón, y de otra parte el arpón tal cual. Así, al unir ambos volúmenes, obtenemos un único volumen que define nuestro modelo simplificado.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 61
Para hacer todo esto en ANSYS se ha realizado una operación Booleana con los dos volúmenes que tenemos. Esta operación consiste en obtener la intersección entre el prisma de hueso y el arpón, y eliminarla del sistema una vez que se ha procesado. De ese modo, tendremos el prisma de hueso con el hueco del arpón, y el arpón insertado en su hueco correspondiente. Lo podemos observar en la siguiente figura, vemos claramente el extremo del arpón a ras de la superficie exterior del prisma, lo cual no sucedía en la Fig. 4.13.
Fig. 4.14: Prisma de hueso con el arpón insertado
Ya tenemos un único volumen formado por dos cuerpos, el prisma de hueso y el arpón. Para manejar esos ‘submodelos’ en ANSYS así como para atribuirles sus correspondientes propiedades físicas, se han creado un ‘component manager’ para cada uno de ellos llamados ‘VHUESO’ y ‘VARPON’. Ambos se presentan en las siguientes figuras.
Fig. 4.15: Volumen asociado a ‘VARPON’

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 62
Fig. 4.16: Volumen asociado ‘VHUESO’ (se representa ¾ del mismo para ver el hueco del arpón)
Como hemos podido observar en la imagen anterior, se comprueba que el prisma de hueso también está divido en 4 cuadrantes, los mismos que definen el modelo del arpón, como ya se comentó anteriormente. Con esto nos estamos asegurando que el mallado de la interfase hueso-arpón no presente saltos indeseados en los elementos que la forman.
Así finalizamos el modelado y pasamos a comentar el mallado que hay que realizar. En este caso usaremos también la aplicación correspondiente de ANSYS, ya que la geometría que tenemos es bastante sencilla.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 63
4.3.3.- Mallado del modelo simplificado
Una vez obtenido el modelo simplificado, pasamos a mallarlo en ANSYS para concluir con el modelo de elementos finitos que podremos resolver posteriormente en ABAQUS. Tendremos en cuenta que el modelo está compuesto por dos cuerpos distintos, de ahí que hueso y arpón se mallen por separado.
En primer lugar elegimos el tipo de elemento que se va a emplear para el mallado. En nuestro caso hemos escogido el elemento SOLID92, que es un elemento tetraédrico tridimensional de sólidos estructurales. Este tipo de elemento es un tetraedro parabólico de 10 nodos con 3 grados de libertad cada uno, ideal para geometrías complejas e irregulares.
Fig. 4.17: Definición del elemento SOLID 92, 3-D 10-nodes Tetrahedral Structural Solid
Elegido el tipo de elemento que se va a emplear para el mallado, se lo asignamos como atributo de mallado tanto al hueso como al arpón. Dado que la resolución del modelo simplificado se hará en ABAQUS no es necesario introducir, además del tipo de elemento que vamos a emplear, las propiedades del material para cada uno de los cuerpos. Si se usara ANSYS para la resolución sería necesario introducir una serie de atributos como pueda ser la densidad, el módulo de Young ó el módulo de Poisson entre otros.
Definidos correctamente los atributos de mallado que tenemos, pasamos a definir la malla del modelo. Para ello, tenemos la posibilidad de aplicar una especie de ‘mallado automático’ que nos ofrece ANSYS, pero así no tendremos control alguno sobre el número y/o el tamaño de los elementos, al igual que tampoco sabremos cómo va a resultar el mallado en la interfase hueso-arpón, donde la geometría es muy irregular, por lo que no contemplaremos dicha opción.
Para controlar la densidad de mallado en el modelo de elementos finitos, en lo que a tamaño y número de elementos se refiere, vamos a usar el comando ‘LESIZE’, con el cual vamos a dividir cada una de las líneas que forman el modelo en tantas partes como número de elementos queramos que haya en cada una de ellas. Por ejemplo, si queremos que en la primera corona del arpón haya 24 elementos, tendremos que dividir cada una de las 4 líneas que la forman (una por cada uno de los cuadrantes que tenemos) en 6 partes, así el número de elementos que definirán la circunferencia mayor de esa corona será de 24 (esto se puede comprobar en la Fig. 4.20). Haciendo esto para cada una de las zonas de interés, obtendremos una malla adecuada a nuestros intereses.
Además del comando ‘LESIZE’, también hemos empleado el ‘ESIZE’, con el cual especificamos el número de divisiones que se tomarán por defecto para las líneas que no se traten con el comando ‘LESIZE’. El resto de detalles del mallado realizado se puede consultar en el segundo apartado del ANEXO II.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 64
A continuación se presentan unas tablas resumen que recogen las zonas que se han tratado, en lo que a división de líneas se refiere, así como el número de divisiones realizadas en ellas. Dichas tablas se acompañarán de la imagen que nos da ANSYS al realizar las divisiones. Esto será así tanto para el arpón como para el prisma de hueso.
TABLA RESUMEN DE LAS DIVISIONES REALIZADAS EN EL ARPÓN
Zona de estudio Número de divisiones
Corona inicial 6
Coronas 2, 4 y 6 10
Coronas 3, 5 y 7 12
Corona final 8
Coronas que forma el cuerpo del arpón
8
Aristas de la cabeza del arpón 4
Aristas de la cola del arpón 6
Aristas de todas las coronas 3
Tabla 4.2: Resumen de las zonas estudiadas para controlar el tamaño de la malla del arpón
Fig. 4.18: Divisiones realizadas sobre las líneas que conforman el arpón.
Como se ha podido apreciar, prácticamente todas las zonas del arpón han sufrido la división de las líneas que la forman. Esto ha sido así porque el arpón será el elemento que controle la densidad de la malla, al ser el elemento que tiene la geometría más irregular, será el que ofrezca más problemas para obtener una malla regular y suave en la interfase hueso-arpón. En el prisma sucede todo lo contrario, en este caso tan sólo se dividirán las aristas principales y el tamaño medio del elemento será bastante mayor que en el arpón.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 65
TABLA RESUMEN DE LAS DIVISIONES REALIZADAS EN EL PRISMA DE HUESO
Zona de estudio Número de divisiones
Aristas de las bases del prisma 5
Aristas laterales del prisma 22
Arista que una la punta del arpón con la base inferior del prisma
16
Tabla 4.3: Resumen de las zonas estudiadas para controlar el tamaño de la malla del prisma del hueso
Fig. 4.19: Divisiones realizadas sobre las líneas que conforman el prisma de hueso y el arpón I.
Fig. 4.20: Divisiones realizadas sobre las líneas que conforman el prisma de hueso y el arpón II.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 66
A continuación se muestran las mallas que se han obtenido tanto para el arpón como para el prisma de hueso. Además se presenta una tabla que recoge el número de elementos que se han obtenido.
Fig. 4.21: Malla realizada para el arpón SMITH&NEPHEW
Fig. 4.22: Malla realizada para el prisma de hueso
NÚMERO DE ELEMENTOS DEL MODELO SIMPLIFICADO
Conjunto Número de elementos
Arpón 19.101
Hueso 51.694
Modelo completo 70.795
Tabla 4.4: Tabla que recoge el número de elementos que tiene cada parte del modelo

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 67
Para finalizar representamos un corte del modelo completo, así podremos observar cómo son los elementos que hay en la interfase hueso-arpón, que es la zona más compleja del modelo.
Fig. 4.23-a: Corte del modelo completo (se representa sólo ¼ del prisma)
Si hacemos un zoom sobre la zona de la interfase hueso-arpón se puede comprobar cómo realmente es el mallado del arpón el que controla la malla del conjunto. Se puede apreciar claramente la transición que se da en el tamaño de los elementos, de menor a mayor, a medida que nos vamos alejando del arpón y nos dirigimos a la superficie exterior del prisma. Esto es lógico, ya que siempre debe haber compatibilidad entre dos elementos contiguos aunque pertenezcan a sólidos distintos, en este caso, uno al hueso y otro al arpón.
Fig. 4.23-b: Zoom de la interfase hueso-arpón del modelo completo

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 68
4.3.4.- Condiciones de contorno y modelo resultante en ABAQUS
Como ya se ha comentado anteriormente, la resolución de este modelo simplificado tiene dos objetivos: depurar la UMAT que usaremos para definir las propiedades del hueso y hacer un análisis del gasto computacional en función al número de elementos que tengamos. Y para ello tendremos que definir una serie de condiciones de contorno que simulen las características del ensayo de arrancamiento, así como las propiedades de cada uno de los componentes del modelo.
En este caso tan sólo tenemos un prisma de hueso, de unas determinadas propiedades que se tomarán aleatoriamente, y el arpón SMIHT&NEPHEW, que son los dos submodelos que forman el modelo simplificado, a diferencia del modelo final que desarrollamos en el siguiente apartado en el que tendremos cuatro (arpón, hueso cortical, hueso trabecular y médula ósea). Ambos modelos tendrán unas propiedades mecánicas diferentes, por un lado el arpón compuesto por Poli L-láctida de características similares al teflón, y de otro el hueso, cuyas propiedades irán dependiendo del nivel de carga que tengamos y que se definirán con la UMAT que pretendemos depurar. Respecto a las condiciones de contorno tampoco tenemos mucho que comentar, ya que parecen claras. Por un lado vamos a imponer que el hueso mantenga fija su posición, empotrando la base inferior del prisma de hueso, y por otro, vamos a definir el movimiento del arpón imponiendo en los nodos que se encuentran en la zona del agujero por donde se introduce el hilo un determinado desplazamiento en la dirección X.
Para imponer en ABAQUS las condiciones de contorno que se han comentado, tendremos programarlas convenientemente en el archivo *.INP impidiendo los desplazamientos oportunos según qué dirección. Por ello, tendremos que crear dos listados en ANSYS (aparte de los que nos definen el modelo en sí a partir de la malla desarrollada en el apartado 4.3.3), uno con los nodos de la base inferior del prisma, definido por nodos_contorno.inp, y otro con los nodos que se encuentran en la zona del agujero del arpón llamado nodos_carga.inp.
Pues bien, una vez se ha programado todo y se ha creado el archivo modelo_simplificado.inp, se introduce en ABAQUS y se obtiene el correspondiente modelo simplificado, como se muestra a continuación. Con esto, ya tan sólo nos queda elegir los parámetros relativos a las propiedades mecánicas (que serán totalmente aleatorios para este modelo) que vamos a introducir y probar que todo funciona correctamente antes de pasar a resolver el modelo real que se define en el siguiente apartado.
Fig. 4.24: Corte del modelo simplificado en ABAQUS donde se ha retirado el arpón.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 69
4.4.- Modelo final: ARPÓN INSERTADO EN LA POSICIÓN A DEL HÚMERO H1
En este apartado se va a obtener el modelo final, es decir, el modelo de elementos finitos que posteriormente resolveremos para simular el ensayo de arrancamiento de arpones. La metodología a seguir para la obtención del modelo es muy similar a la del apartado anterior, con la diferencia de que ahora la geometría del hueso es mucho más compleja y habrá que emplear una serie de programas que antes no eran necesarios. Una vez tengamos el modelo del sistema, se buscará una malla adecuada teniendo en cuenta que ahora el número de elementos es un factor muy importante en lo que a gasto computacional se refiere, ya que serán muchas las simulaciones que se harán con el fin de obtener todos los resultados perseguidos por este proyecto. Sin más preámbulos, pasamos a definir la geometría del modelo.
4.4.1.- Obtención de la geometría
La geometría que buscamos es la del sistema resultante de insertar el arpón SMITH&NEPHEW en la posición A del húmero H1. Dada la complejidad que tiene el diseño de este sistema, en primer lugar vamos a obtener la geometría de cada uno de ellos por separado y luego, en el apartado siguiente, estableceremos la relación correspondiente entre ambos.
El arpón lo tenemos ya modelado del apartado 4.1, por lo que no tenemos que preocuparnos de su diseño. Posteriormente, cuando ya tengamos definida la geometría del hueso, modificaremos el modelo actual del arpón con el fin de colocarlo en la posición correcta del húmero.
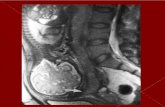
En el caso del hueso, tendremos que obtener la geometría a partir de una serie de T.A.C (Tomografía Axial Computarizada) realizados sobre su cabeza humeral y parte de la diáfisis, el resto del hueso queda fuera del alcance de nuestro estudio y no se va a modelar, de ahí que no se haya escaneado más allá de la zona de interés. Esos T.A.C son imágenes de cortes axiales realizados al húmero, como si se hubiese dividido el hueso en un número determinado de ‘rodajas’, a partir de las cuales podremos obtener la geometría real del húmero.
Para ello usaremos un programa especializado para el tratamiento de tomografías llamado MIMICS. Este software de diagnóstico es una técnica sanitaria muy empleada en la medicina actual, ya que posibilita una exploración bastante exhaustiva de la zona deseada. Son muchas las aplicaciones que nos ofrece, destacando que:
• Nos permite estudiar la densidad mineral ósea en todas las zonas escaneadas en función a una escala de colores predeterminada. Así podremos estimar las características del hueso que tenemos en cada punto, principalmente si es cortical ó trabecular, ya que la médula ósea será difícil de cualificar.
• Se puede observar cada sección desde tres vistas distintas: axial, coronal y sagital. Esto es fundamental en lo que a diagnóstico se refiere.
• Nos da la posibilidad de obtener la geometría del hueso en 3D a partir de los cortes axiales, siendo ésta la aplicación que más nos interesa a nosotros ya que podremos obtener un modelo fiel del húmero.
• Ofrece la posibilidad de crear ‘máscaras’ que nos permitan mejorar el modelado del hueso y crear pequeños submodelos a partir de los DICOMS (Digital Imaging and Communication in Medicine) correspondientes de los T.A.C.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 70
A continuación mostramos una imagen que representa la ventana de trabajo del programa MIMICS una vez que se han cargado los DICOMS de los T.A.C correspondientes al hueso que se pretende estudiar.
Fig. 4.25: Ventana de trabajo de MIMICS
Si nos fijamos sólo en una de las tres vistas que nos ofrece el programa (ver Fig. 4.26), podremos apreciar la dispersión que hay en la densidad mineral ósea sin más que observar la escala de grises que tenemos en la imagen. No obstante, el hueso cortical se distingue fácilmente del resto ya que, al ser presumiblemente la parte más densa del hueso, está resaltado en un color mucho más claro (prácticamente blanco).
Fig. 4.26: Vista sagital de una de las secciones del húmero H1
Como se ha podido apreciar en la imagen anterior, hay una línea ‘muy clara’ que describe perfectamente el contorno del hueso y que se corresponde con el hueso cortical, ya que es la parte más densa y más exterior del hueso. Por otro lado, vemos que en la cabeza humeral hay una especie de nebulosa con distintos tonos grises, lo cual nos está indicando la presencia de hueso trabecular, pudiendo apreciar la disposición de los conjuntos de trabéculas que lo forman.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 71
Por último, vemos cómo a medida que nos alejamos de la cabeza humeral, esa nebulosa de grises de va disipando hasta el punto de que en la diáfisis prácticamente no se distingue nada, debido a que prácticamente todo lo que hay en esta zona es médula y su densidad mineral es casi despreciable, de ahí que el escáner lo recoja con gran dificultad.
A raíz de todo esto, cabe pensar que vamos a tener dificultad para distinguir las zonas en las que tenemos hueso trabecular y en qué proporción en comparación con la médula ósea. Pero al menos sí que conocemos cualitativamente cómo se distribuye el hueso trabecular, ya que está prácticamente concentrado en la cabeza humeral.
Por ello, tendremos que obtener el modelo en 3D del húmero basándonos exclusivamente en el hueso cortical, que es el único que nos asegura que se va a reproducir la geometría del hueso tal cual es. Las exigencias que imponemos al modelo que nos de MIMICS son:
• Representar fielmente la geometría del húmero en 3D.
• Que el grosor de hueso cortical sea exactamente el mismo de cada una de las zonas del hueso, ya que al ser la parte más rígida del hueso tendrá una gran repercusión en los resultados finales. Además el arpón se insertará en una posición en la que habrá hueso cortical y trabecular, y conocer la proporción de uno y otro será crucial para poder simular el ensayo de arrancamiento.
• Que nos permita estimar la disposición general del hueso trabecular y de la médula por todo el hueso.
Para obtener dicho modelo tendremos que actuar directamente sobre los DICOMS, para así crear una serie de máscaras que al procesarlas correctamente en MIMICS nos dé el modelo que buscamos. A continuación se enumeran los pasos seguidos en el desarrollo de dicho modelo.
1. Cargamos los DICOMS representativos de los T.A.C realizados al húmero H1, un total de 160 en este caso. Una vez cargados y tratados por MIMICS podremos ver la ventana de trabajo representada en la Fig. 4.25.
Fig. 4.27: Ventana con la que cargamos los DICOMS en MIMICS.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 72
2. Creamos una máscara en la que sólo tengamos el hueso cortical. Para ello, se han modificado los 160 DICOMS que tenemos eliminando todo lo que no sea hueso cortical y retocando el contorno del mismo para evitar que quede algún hueco con la ayuda del ‘multiple slice edit’. Esta tarea es muy copiosa y requiere ser meticuloso para no modificar el grosor de cortical. Para ser más precisos se hará sobre la vista axial de cada DICOM, tal y como se muestra a continuación.
Fig. 4.28: Editado de la máscara del hueso cortical (vista axial)
Fig. 4.29: Perfilado de la máscara de cortical (vista axial)
Fig. 4.30: Máscara de cortical una vez retocada (vista axial)

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 73
3. Una vez creada la máscara de cortical, la modelamos en 3D para comprobar si el resultado obtenido es el esperado, esto es, una geometría suave y sin huecos. Para obtener este modelo tridimensional usamos la opción ‘calculate 3D’ que se encuentra en el menú ‘segmentation’.
Fig. 4.31: Máscara de cortical 3D (vista frontal)
Fig. 4.32: Máscara de cortical 3D (vista lateral)
Fig. 4.33: Máscara de cortical 3D (vista en planta)

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 74
4. La máscara de cortical que se ha modelado en 3D nos está dando la geometría del húmero como si de un hueso hueco se tratase, ya que en su interior no hay nada. Para definir lo que hay en el interior del hueso tendríamos que obtener la máscara correspondiente para el hueso trabecular y para la médula pero, como ya se ha comentado, eso es prácticamente imposible ya que es muy difícil distinguir en los DICOMS el tejido óseo del blando. Por esta razón, lo que vamos a hacer es estudiar cualitativamente hasta dónde llega el hueso trabecular y crear dos máscaras, una para el hueso trabecular y otra para la médula ósea general (sin distinguir entre médula ósea roja y amarilla). Para decidir hasta dónde llega el hueso trabecular y a partir de qué punto tenemos médula ósea, vamos a examinar cuidadosamente la vista sagital de de los DICOMS correspondientes a la zona central del hueso (ver Fig. 4.34). Una vez decido creamos las máscaras usando la opción ‘cavity fill’ del menú ‘segmentation’ que, a grandes rasgos, lo que hace es ‘rellenar’ el hueco de la máscara de cortical con dos máscaras más, por un lado la correspondiente al hueso trabecular y por otro la de la médula ósea.
Fig. 4.34: Vista sagital de un DICOM de la parte central del húmero H1
Fig. 4.35: Vista sagital de la distribución de hueso trabecular (amarillo) y médula ósea (azul) en un
DICOM de la parte central del húmero H1

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 75
5. Por último, se modelan las dos nuevas máscaras en 3D para así tener definida por completo la geometría del húmero H1. A partir de aquí se podrán exportar las geometrías de cada una de las máscaras en un archivo *.STL para obtener el modelo correspondiente de cada una ellas en el software de modelado que empleemos.
Fig. 4.36: Máscaras correspondientes al hueso trabecular (amarilla) y a la médula ósea (azul)
Fig. 4.37: Modelo tridimensional completo del húmero H1
Con esto se finaliza la definición de la geometría del hueso. Ya tan sólo queda obtener el modelo correspondiente y mallarlo según nos interese para que el modelo de elementos finitos resultante sea adecuado para resolverlo en ABAQUS.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 76
4.4.2.- Modelado del sistema completo
En este apartado se va obtener el modelo del sistema completo, es decir, el arpón insertado en la posición A del húmero H1. Para lo cual, partimos del modelo del arpón que ya tenemos definido en ANSYS y del archivo *.STL con la geometría del hueso que hemos obtenido de MIMICS.
Todo ello se llevará a cabo con el programa ANSYS ICEM, un módulo de ANSYS 11.0 que nos permite, por un lado, realizar modelos a partir de diversas geometrías dadas por distintos tipos de extensiones y, por otro, mallar automáticamente cualquier geometría sin más que introducir una serie de parámetros relativos al tamaño del elemento. Una vez se realice el mallado, podremos exportarlo todo a ANSYS y obtener los listados de nodos y elementos que introduciremos en ABAQUS para su posterior resolución.
En el caso que nos ocupa tendremos que importar a ANSYS ICEM tanto la geometría del arpón como la del hueso. El arpón está definido en ANSYS pero, para que exista compatibilidad con ANSYS ICEM, tendremos que adaptar el formato actual a uno que se pueda importar al nuevo programa. Por esto, tendremos que exportar la geometría de ANSYS en formato *.IGES, que sí es compatible con ANSYS ICEM. En el caso del hueso no tenemos problemas, ya que el formato *.STL es totalmente compatible, la única salvedad es que, si recordamos del apartado anterior, la geometría del hueso estaba dada a partir de 3 máscaras (hueso cortical, hueso trabecular y médula ósea) y tendremos que importar cada una de ellas. Esta tarea resulta algo copiosa porque hay que trabajar con tres programas simultáneamente, de ahí que todo el proceso a seguir se haya divido en varias etapas.
A continuación vamos a mostrar los modelos que obtenemos en ANSYS ICEM para cada uno de los elementos que se han importado: hueso cortical, hueso trabecular, médula ósea y arpón
Fig. 4.38: Modelo del hueso cortical en ANSYS ICEM
Vemos cómo se obtiene una imagen muy similar a la representada en la Fig. 4.32. Al igual que entonces, este modelo es como si de un hueso ‘hueco’ se tratase, en la figura siguiente se muestran los modelos correspondientes al hueso trabecular y a la médula ósea que ‘llenan’ el interior del modelo aquí representado.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 77
Fig. 4.39: Modelo hueso trabecular-médula ósea en ANSYS ICEM
En la figura anterior se puede apreciar el cambio de hueso trabecular (en color morado) a médula ósea (en color amarillo), así como también se puede observar cierta rugosidad en la superficie exterior de ambos modelos al igual que sucedía en la Fig. 4.36 extraída de MIMICS. Esto es debido a que toda la geometría, la de todo el hueso en general, se ha obtenido a partir de tan sólo 160 DICOMS que además se han modificado manualmente para crear las máscaras correspondientes, de ahí que se exista esta rugosidad. No obstante, esto no supondrá ningún problema para nosotros porque, al igual que la tienen estos modelos en su exterior, el modelo del hueso cortical también tiene una rugosidad equivalente en su superficie interior, por lo que no habrá discontinuidad alguna.
Fig. 4.40: Modelo del arpón en ANSYS ICEM
El modelo que obtenemos del arpón es exactamente igual al que obtuvimos en ANSYS, las únicas diferencias que se puedan apreciar son por cuestiones gráficas del propio programa.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 78
Una vez que se tiene los modelos por separado de cada uno de los elementos que componen el sistema completo, nos quedará insertar el arpón en la posición exacta y a la profundidad adecuada del hueso para que se den las mismas condiciones que se tenían en el ensayo de arrancamiento.
A diferencia de lo que sucedía en ANSYS, el programa ANSYS ICEM trata la intersección de volúmenes distintos como si de uno sólo se tratase, por lo que al colocar el arpón en su localización exacta, el programa automáticamente considerará un único volumen formado por la unión hueso-arpón, lo cual tiene una visión positiva y otra negativa. La positiva es que al realizar el mallado del sistema no habrá que diferenciar entre arpón y hueso, tan sólo impondremos que el tamaño de los elementos en la zona donde está insertado el arpón sea lo suficientemente pequeño como para que los resultados que obtengamos al resolver el problema simulen lo mejor posible el ensayo real, fuera de esa zona el tamaño de los elementos no nos preocupa demasiado. Por el contrario, tiene un aspecto negativo, y es que, al suponer la intersección como un único volumen e introducir el arpón hasta una profundidad de 17 mm (midiendo tan sólo 16 mm), en el modelo del sistema completo habrá 1 mm de hueso por encima del arpón que en realidad no hay, por lo que tendremos que eliminarlo si se quieren reproducir las mismas condiciones del ensayo real. Para solucionarlo, se modificará el modelo del arpón en ANSYS añadiendo un pequeño volumen en su cola a modo de ‘prolongación’ (así es como se ha denotado en los ANEXOS II y III) hasta llegar a los 17 mm y se volverá a exportar a ANSYS ICEM (ver Fig. 4.41). Así, una vez insertado el arpón modificado en la posición adecuada, no quedará hueso por encima y tendremos las condiciones exactas del ensayo sin más que eliminar el volumen correspondiente a la prolongación que hemos creado.
Fig. 4.41: Modelo modificado del arpón en ANSYS ICEM
Llegados a este punto, tan sólo nos queda insertar el arpón en la posición A para finalizar el modelo del sistema completo. Esta tarea es compleja y requiere del uso simultáneo de ANSYS y ANSYS ICEM. Al importar las geometrías del hueso y del arpón a ANSYS ICEM, el programa se encarga de asignar un sistema de referencia global a los modelos creados, siendo el mismo para todos ellos. Por ello, cada modelo adoptará una posición distinta en el sistema de referencia global (ver Fig. 4.42), que dependerá exclusivamente del sistema de referencia en el que se ha definido cada geometría. Para el arpón es conocido, porque lo elegimos nosotros cuando se modeló en ANSYS, pero en el caso del hueso no tenemos ni idea de dónde se tomó dicho sistema de referencia, ya que esa tarea la realiza automáticamente MIMICS.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 79
En la siguiente imagen podemos apreciar esto que comentamos, vemos cómo hueso y arpón están situados en distintas posiciones en función al sistema de referencia que se ha tomado para definir la geometría y en función al propio sistema de referencia que ha tomado ANSYS ICEM.
Fig. 4.42: Situación de los modelos del hueso y del arpón en ANSYS ICEM
Lo que está claro es que necesitamos tener el modelo del arpón y el del hueso en el mismo sistema de referencia, de no ser así no habrá manera de insertar el arpón en la posición exacta del hueso. Por ello, la única solución que podemos plantear al respecto es exportar el modelo del hueso de ANSYS ICEM a ANSYS para así tener definida la geometría del hueso en el mismo sistema de referencia del arpón. Una vez lo tengamos, podremos colocar el arpón en la posición A creando un sistema de coordenadas local en el punto exacto que debe ocupar la punta del arpón, esto es, en la posición A y a una profundidad de 17 mm.
El principal problema que nos encontramos al llevar a cabo esto es que existe incompatibilidad entre ANSYS ICEM y ANSYS para exportar una geometría de uno a otro sitio. En cambio sí que podemos exportar sin problema el mallado. Por ello, se ha optado por realizar un mallado automático del hueso (con un número aceptable de elementos para que la cabeza humeral quede definida correctamente) para exportarlo posteriormente a ANSYS. Esto, al fin y al cabo, también exporta la geometría en cuestión, sólo que en este caso se hace definiendo un determinado número de nodos. Una vez tengamos la malla del hueso en ANSYS, elegimos el nodo correspondiente a la posición A (ver Fig. 4.43), extraemos las coordenadas de dicho nodo y ya podremos conocer las coordenadas exactas del punto en el que hay que colocar el sistema local de coordenadas para llevar a cabo la inserción del arpón.
Como se puede ver en el ANEXO II de este proyecto, el sistema local de coordenadas se ha definido a partir de 3 nodos: el nodo que define el origen de coordenadas (cuyas coordenadas se han obtenido como se ha comentado antes), el nodo que define la dirección del eje X a partir del nodo anterior y el nodo que define el plano XY a partir de la dirección definida por los dos nodos anteriores. Hay que tener en cuenta, que la dirección X del sistema local de coordenadas (la que recorre el eje principal del arpón) será la dirección Z del sistema de referencia global.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 80
En la siguiente tabla se definen los 3 nodos comentados así como aquel que nos determina la posición A tal cual aparece en la Fig. 4.43.
NODOS QUE DETERMINAN LA INSERCIÓN DEL ARPÓN EN LA POSICIÓN A DEL HÚMERO H1
NODO COORDENADAS (X, Y, Z)
3.515 7.346600342E+01 7.963500214E+01 4.920900128E+01
200.000 7.346600342E+01 7.963500214E+01 3.220900128E+01
200.001 7.346600342E+01 7.963500214E+01 5.500000000E+01
200.002 7.346600342E+01 8.200000000E+01 4.920900128E+01
Tabla 4.5: Definición de los nodos que determinan la inserción del arpón
Fig. 4.43: Esquema de la situación de las 9 posiciones de inserción en el húmero H1.
Pues bien, una vez conocidas las coordenadas de todos los nodos que necesitamos para definir el sistema local de coordenadas, modificamos consecuentemente el archivo de ANSYS que nos definía el modelo del ‘arpón prolongado’ y lo procesamos. Así ya tendremos el arpón colocado en la localización exacta del hueso, tan sólo nos quedaría exportar el modelo modificado del arpón desde ANSYS a ANSYS ICEM en formato *.IGES.
A continuación se muestra cómo queda colocado el arpón en la posición A del húmero H1. Vemos cómo en la Fig. 4.44 aún no se ha eliminado la prolongación del arpón añadida para evitar que se forme hueso por encima del mismo al realizar la intersección de volúmenes. Por último, se representan un par de figuras del modelo final. En primer lugar se representa el modelo sin el hueso cortical para apreciar con más claridad la inserción del arpón, y por último, el modelo final previo a realizarle el mallado adecuado que se desarrollará en el siguiente apartado.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 81
Fig. 4.44: Modelo final incluida la prolongación del arpón
Fig. 4.45: Modelo final sin el hueso cortical
Fig. 4.46: Modelo final a falta de realizar el mallado

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 82
4.4.3.- Mallado del sistema completo
Una de las ventajas que tenemos al modelar el sistema en ANSYS ICEM es que nos permite realizar un mallado adecuado del modelo sin más que introducir una serie de parámetros relativos al tamaño de los elementos.
Antes de comenzar el mallado, hay que tener en cuenta que el número de elementos que obtengamos en la malla final debe ser el adecuado para que el gasto computacional que tengamos al resolver el problema numérico sea asumible con los medios que tenemos. Para tener una estimación del número de elementos que podemos tratar, se ha hecho un estudio de tiempo y gasto computacional en función al número de elementos resolviendo el modelo simplificado que se desarrolló en el apartado 4.3. Dicho estudio nos reveló que no se deben superar los 70.000 elementos si queremos que el gasto computacional sea compatible con la cuenta de usuario que tenemos en el servidor. Si se supera ese número de elementos no podremos simular más de 15 pasos del ensayo de tracción, y estaríamos limitados para simular los resultados obtenidos experimentalmente.
Por otro lado hay que comentar que, para que se mantenga la geometría definida anteriormente, tendremos que mallar sin eliminar la prolongación del arpón ya que, de no ser así, al mallar se volvería a crear hueso cortical por encima del arpón y nos estropearía el modelo.
El mallador de ANSYS ICEM nos ofrece múltiples opciones, pero de todas ellas sólo vamos a usar las relativas al tipo, tamaño y distribución de los elementos. A continuación se enumeran las opciones del menú ‘Mesh’ que se han empleado, así como los detalles activados en cada una de ellas para realizar el mallado.
• Global Mesh Setup: Con esta opción determinamos las condiciones generales del mallado, como puedan ser: el factor de escala del elemento, el tipo y método de mallado, el tipo y la combinación de los elementos y por último, el modo y número de iteraciones que se llevarán a cabo para el suavizado de la malla.
• Part Mesh Setup: En esta ocasión lo que hacemos es determinar parámetros relativos al tamaño y la transición de los elementos en cada una de las ‘partes’ del modelo completo, es decir, las 5 que tenemos: Arpón, prolongación, hueso cortical, hueso trabecular y médula ósea. Los parámetros que vamos a utilizar para cada una de las partes serán: Tamaño máximo y mínimo del elemento, número de capas con el tamaño de elemento que haya en la capa más exterior y el factor de aumento en la transición del tamaño de los elementos.
• Compute Mesh: Éste es el último paso previo a procesar el mallado. En este caso, lo único que determinamos es el tipo y la densidad de malla.
La elección de estas opciones de mallado es fruto de un estudio a modo de ‘prueba y error’ realizado sobre el modelo final. A medida que íbamos testando, se fueron cambiando parámetros según creíamos oportuno para obtener un tamaño y número de elementos adecuado en cada una de las zonas de interés. A continuación se presentan las ventanas de ANSYS ICEM correspondientes a las opciones de mallado empleadas con todos los parámetros que se han ajustado en cada una.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 83
Fig. 4.47: Ventanas para definir los parámetros en Global Mesh Setup
Fig. 4.48: Ventana para definir los parámetros de Part Mesh Setup
Fig. 4.49: Ventana dónde se definen los parámetros de Compute Mesh

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 84
Una vez ajustados los parámetros de cada una de las opciones de mallado, se procesa y obtenemos la malla correspondiente (ver Fig. 4.50). El mallador automático empleado nos da una malla formada por ‘31 partes’, las 5 que teníamos antes (arpón, prolongación, hueso cortical, hueso trabecular y médula ósea) y 26 nuevas, que se crean para poder gestionar la malla con los condicionantes que hemos impuesto. A continuación se muestra una imagen del modelo mallado y una tabla que resume los resultados del mismo.
Fig. 4.50: Mallado inicial obtenido en ANSYS ICEM
RESULTADOS OBTENIDOS CON LA MALLA INCIAL DEL MODELO COMPLETO
Nº total de nodos 10.157
Nº total de elementos 68.303
Tipos de elementos empleados y número de ellos
SOLID 185 55.274 SHELL 93 13.029
Nº de partes malladas 31
Tabla 4.6: Resumen de la malla inicial del modelo final
Como se ha podido apreciar en la tabla anterior, aparecen dos tipos de elementos. Por un lado elementos tridimensionales SOLID185, que son tetraedros lineales, y por otro, también tenemos elementos membrana del tipo SHELL93. Nosotros sólo queremos elementos 3D, y por ello en la ventana que se representa en la Fig. 4.49 elegimos el tipo de mallado ‘Tetra/Mixed’, ya que era la única forma de imponer que el mallado se realizara con tetraedros y no con hexaedros. Como consecuencia de esto, el mallador automático crea una malla mixta entre elementos 2D (SHELL) y 3D (SOLID) que no es lo que nosotros buscamos.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 85
Esos elementos membrana lo que hacen es crear una superficie que ‘envuelve’ la geometría del hueso y la del arpón, con el fin de absorber pequeñas irregularidades que se puedan dar en la malla por culpa de los elementos 3D, pero nosotros no queremos esto. En el caso de que existan irregularidades importantes en la malla se tratarían manualmente en ANSYS para evitar los posibles concentradores de tensión que tengamos y/ó para que ABAQUS admita la malla final y resuelva el modelo de elementos finitos sin problemas. Por ello, una vez obtenida la malla anterior, se han eliminado todos los elementos 2D con la opción correspondiente del menú ‘Mesh’, quedando ahora tan sólo 55.274 elementos.
Por otro lado, hemos visto que el elemento 3D que utiliza ANSYS ICEM es el SOLID185. Este tipo de elemento es un tetraedro lineal de 8 nodos que, como podemos ver en la Fig. 4.51, resulta de la degeneración de un hexaedro. Esto nos puede traer problemas importantes en la resolución del problema, por lo que tenemos que cambiar el elemento para que el elemento sea un tetraedro parabólico tal y como lo era el que se usó en el mallado del modelo simplificado del apartado 4.3. Ese tipo de elemento se corresponde con el SOLID92 o el SOLID187, que son tetraedros de 10 nodos ideales para el mallado de geometrías complejas (ver Fig. 4.52). El problema es que, al emplear el mallador automático de ANSYS ICEM, no tenemos control sobre la elección del tipo de elemento que usa para mallar.
Fig. 4.51: Definición del elemento SOLID 185, 3-D 8-nodes Tetrahedral Structural Solido r Layered Solid
Fig. 4.52: Definición del elemento SOLID 187, 3-D 10-nodes Tetrahedral Structural Solid
La única solución que tenemos para pasar de tener un elemento SOLID185 a otro SOLID187 es ‘editar el mallado’ de manera que, creando nodos intermedios entre los 10.157 que ya tenemos definidos, se formen tetraedros con 10 nodos (uno por cada vértice y otro en el centro de cada una de las 6 aristas) como el de la Fig. 4.52.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 86
Para llevarlo a cabo lo que hacemos es emplear la opción ‘Convert Mesh Type’ que encontramos en el menú ‘Edit Mesh’, así lo que estamos haciendo es crear nodos intermedios ‘Create Mide Side Nodes’ en los tetraedros iniciales, pasando a tener un tetraedro de 10 nodos del tipo SOLID 187, que es el que nosotros necesitamos. Eso sí, antes de hacer el editado del mallado tenemos que eliminar los elementos membrana (elementos 2D del tipo SHELL), ya que ese tipo de elemento no tiene sentido en nuestro modelo. Una vez se haya hecho el editado del mallado, tal y como se ha comentado, obtenemos la malla final con los siguientes resultados en lo que a nodos, elementos y partes se refiere.
Fig. 4.52: Definición del elemento SOLID 187, 3-D 10-nodes Tetrahedral Structural Solid
RESULTADOS OBTENIDOS CON LA MALLA FINAL DEL MODELO COMPLETO
Nº total de nodos 76.063
Nº total de elementos 54.237
Tipo de elemento SOLID 187
Nº de partes malladas 22
Tabla 4.7: Resumen de la malla final del modelo final
Esta malla final se exporta a ANSYS, donde posteriormente se extraerán los listados de nodos y elementos que se usarán para definir la geometría del modelo en ABAQUS. Al exportar la malla, se crea automáticamente un archivo *.IN que define el modelo en ANSYS a partir de los 76.063 nodos y los 54.237 elementos, los cuales se organizan en 22 grupos ó partes que definen los ‘4 submodelos’ que constituyen el modelo: arpón, hueso cortical, hueso trabecular y médula ósea. Para definir cada uno de esos submodelos vamos a crear un listado de comandos que nos agrupen las 22 partes según corresponda y que nos repare la malla en caso de que haya elementos que sean excesivamente irregulares y/o que nos puedan crear un concentrador de tensiones en el modelo.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 87
La agrupación de las 22 partes para obtener los 4 submodelos se describe en la Tabla 4.8. En cuanto a la reparación de la malla, lo que se ha hecho es quitar elementos de un grupo e insertarlos en otro (porque realmente pertenezcan a éste) y mejorar el mallado de la cola del arpón, que es la única parte que tiene una malla más irregular (ya que se encuentra en la interfase entre hueso cortical y hueso trabecular). En las figuras 4.53 y 4.54 se pueden ver los submodelos del arpón antes y después de la reparación. Todos los comandos que realizan estas operaciones se pueden encontrar en el ANEXO II de esta memoria con el nombre de agrupación.txt.
AGRUPACIÓN DE PARTES PARA FORMAR LOS 4 SUBMODELOS
SUBMODELO Nº DE LAS PARTES
Arpón 5-6-7-8-9-11-13-14-15-16-17-21
Hueso cortical 2-4-18
Hueso trabecular 1-10-12-19-20-22
Médula ósea 3
Tabla 4.8: Resumen de la malla final del modelo final
Fig. 4.53: Arpón en ANSYS antes de repararlo manualmente
Fig. 4.54: Arpón en ANSYS después de repararlo manualmente

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 88
4.4.4.- Condiciones de contorno y modelo resultante en ABAQUS
Finalmente, ahora que ya tenemos el modelo final completamente definido en ANSYS, pasamos a obtener el listado de nodos y elementos que nos creará el modelo del sistema en ABAQUS. Igualmente, como ya se hizo para el modelo simplificado en el apartado 4.3.4, tendremos que definir las condiciones de contorno necesarias para que se simulen las mismas condiciones de los ensayos reales, así como las propiedades mecánicas de cada uno de los 4 submodelos que tenemos (arpón, hueso cortical, hueso trabecular y médula ósea).
Las condiciones de contorno que vamos a definir serán idénticas a las que se comentaron para el modelo simplificado. En primer lugar impondremos que el hueso permanezca fijo, ya que el sistema de sujeción impide el movimiento del mismo, por lo que tendremos que obtener un listado con los nodos de la zona de hueso introducida en el cilindro del sistema de sujeción e impedirles todos sus movimientos, es decir, ‘empotrarlos’. Y por otro lado, tendremos la condición de contorno relativa a la carga, la cual se va a imponer según la dirección en la que se tira del arpón (dirección Z en nuestro caso) y sobre los nodos que ocupan la posición relativa al agujero por donde se insertaba el hilo del arpón.
En el primero de los casos, para decidir qué parte del hueso queda fijada al sistema de sujeción, acudimos a la Fig. 3.1 donde teníamos la imagen del ensayo realizado en al húmero H1, y podremos ver hasta dónde se insertaba el hueso en el cilindro metálico. Al trasladarlo a ANSYS e imponer la condición de empotramiento en los nodos correspondientes, obtenemos lo que se representa en la Fig. 4.55. Los nodos seleccionados se listan creando el archivo nodos_contorno.inp, que será el que se use para introducir ésta condición en ABAQUS.
Fig. 4.55: Imposición de la condición de empotramiento en ANSYS
Para obtener el listado de los nodos sobre los que se va a imponer la condición de contorno de la aplicación de carga, tan sólo tendremos que seleccionar en ANSYS los nodos que se encuentran en las mismas coordenadas que el agujero inferior del arpón, y listarlos creando el correspondiente archivo nodos_carga.inp. Estos archivos serán parte de los ‘inputs’ que acompañen al tipo del análisis que vamos a realizar sobre el modelo final en ABAQUS.

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 89
Los comandos utilizados para seleccionar los nodos correspondientes a cada condición de contorno, así como para obtener los listados en formato *.INP, se pueden encontrar en el archivo listado.txt que se detalla en el ANEXO II y también en el DVD del proyecto fin de carrera.
A continuación, mostramos cómo queda el modelo final una vez exportado a ABAQUS, representando cada una de las partes que lo forman y comentando algunos detalles de interés.
Fig. 4.56: Modelo completo en ABAQUS
Si vemos el modelo desde una vista superior, podremos observar cómo el arpón está insertado exactamente en la posición A del húmero, así como el pequeño agujero que nos queda en el hueso al insertar el arpón a una profundidad de 17 mm.
Fig. 4.57: Vista superior del modelo completo en ABAQUS
Si a éste modelo le quitamos el arpón, el hueso trabecular y la médula ósea, nos queda el ‘húmero hueco’ o lo que es lo mismo, la parte o submodelo relativo al hueso cortical (ver Fig. 4.58).

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 90
Fig. 4.58: Modelo del hueso cortical en ABAQUS
Al igual que se ha hecho para el hueso cortical, representamos los submodelos correspondientes del hueso trabecular y de la médula ósea, tanto por separado como en conjunto, definiendo en este último caso el interior del ‘húmero hueco’ comentado anteriormente.
Fig. 4.59: Modelo del hueso trabecular en ABAQUS
Fig. 4.60: Modelo de la médula ósea en ABAQUS

Capítulo 4: Obtención del modelo de elementos finitos (MEF) 91
Fig. 4.61: Interior del hueso (hueso trabecular y médula ósea) en ABAQUS
Si ampliamos la zona de inserción del arpón comprobamos que prácticamente todo el cuerpo del mismo está insertado en hueso trabecular y casi nada en cortical (tan sólo 0,915 mm). Por esta razón, tendremos que ser muy cuidadosos en la elección de las propiedades del hueso trabecular si queremos que la simulación del ensayo se acerque a la realidad.
Fig. 4.62: Zoom sobre la inserción del arpón en el hueso trabecular en ABAQUS
Sin más que comentar, damos por finalizado este capítulo y pasamos al siguiente, en el cual se introducirán las referencias teóricas relativas a los criterios de fractura empleados para simular la fractura del hueso.