Planificación Automática para el control inteligente de...
33
Ángel García Olaya [email protected] http://www.plg.inf.uc3m.es/~agolaya.php Grupo de Planificación y Aprendizaje (PLG) Departamento de Informática Universidad Carlos III de Madrid / Prometeo CONACIN 2013 19 de Julio de 2013 Planificación Automática para el control inteligente de robots autónomos
Transcript of Planificación Automática para el control inteligente de...
Ángel García Olaya [email protected]
http://www.plg.inf.uc3m.es/~agolaya.php
Grupo de Planificación y Aprendizaje (PLG)
Departamento de Informática
Universidad Carlos III de Madrid / Prometeo
CONACIN 2013
19 de Julio de 2013
Planificación Automática para el control inteligente
de robots autónomos

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
2
Del cine…

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
… a la realidad
3
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Las diferencias
Mecánica y electrónica
Robótica
Comportamiento
Inteligencia Artificial
4
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Robots reales
5

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Inteligencia
¿Cómo consigo que un robot se comporte
inteligentemente?
Control a alto nivel
Pre-programación
Control remoto (tele-operación)
Inteligencia Artificial
6

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Pre-programación
Técnica clásica para el control de robots
Se pre-programan los comportamientos del robot
ante todas las situaciones
Problemas:
Complejo
Poco flexible
Dificultad ante eventos inesperados
7
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Control remoto
El robot es teledirigido por una persona
La inteligencia la pone la persona
Alternativas
Mando
Entornos virtuales
Control corporal (imitación)
Inconvenientes:
Necesidad de una persona
8
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Inteligencia Artificial
Permite crear robots totalmente autónomos
Capaces de adaptar su comportamiento a las
circunstancias de forma dinámica
IA y robótica son dos campos complementarios
que han vivido mucho tiempo separados
Cada uno tenía sus propios problemas por resolver
Ambos están suficientemente maduros en la
actualidad para pensar en la integración
9
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Planificación Automática
Una de las características de la inteligencia avanzada
es la capacidad de hacer planes
Prever acciones futuras
La planificación automática es el área de la
inteligencia artificial que intenta dotar a las
máquinas con la capacidad de hacer planes
10
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
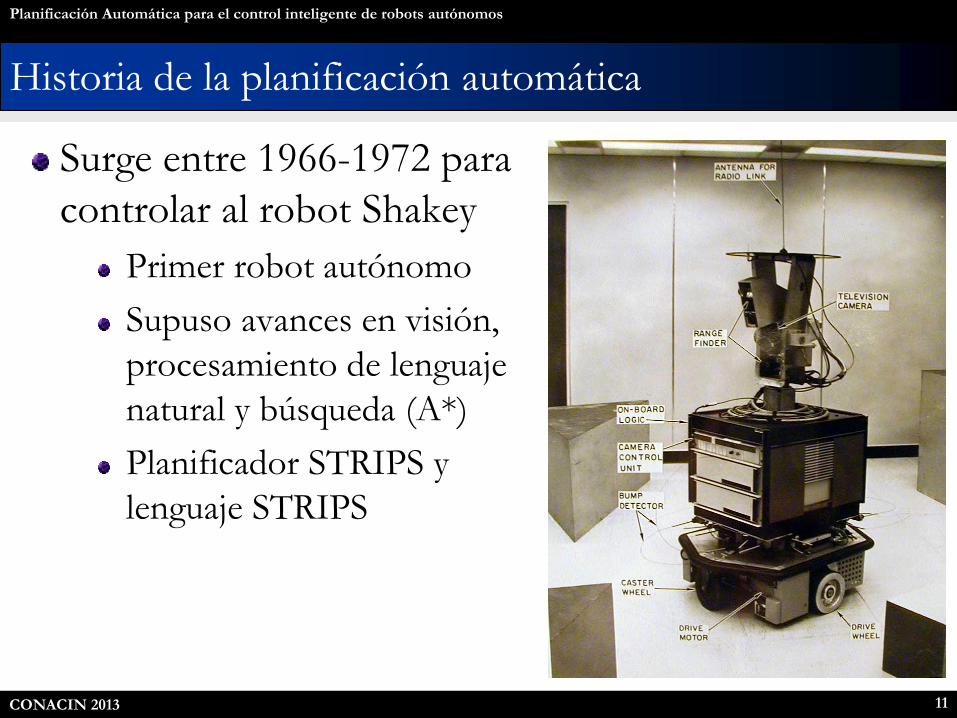
Historia de la planificación automática
Surge entre 1966-1972 para
controlar al robot Shakey
Primer robot autónomo
Supuso avances en visión,
procesamiento de lenguaje
natural y búsqueda (A*)
Planificador STRIPS y
lenguaje STRIPS
11

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Control mediante planificación automática
Se proporciona al robot una descripción de
el estado actual
las metas a cumplir
las acciones que puede llevar a cabo
El robot se encarga autónomamente de encontrar la
secuencia de acciones que debe realizar para
cumplir las metas
12

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
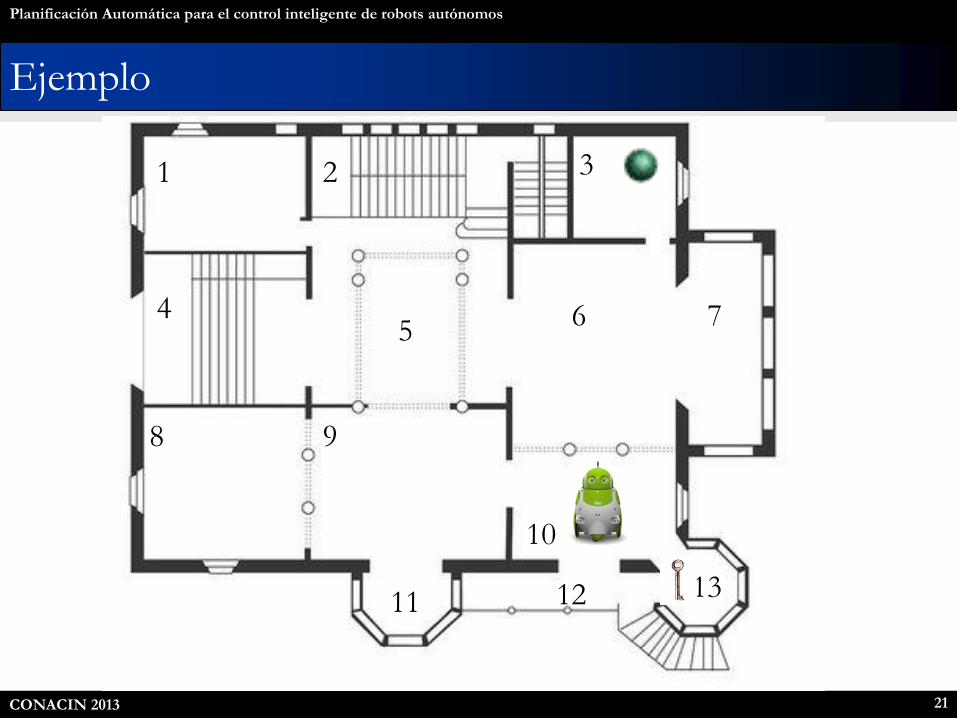
Ejemplo
13
1
5 4 7 6
9 8
11
10
12
3 2
13
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
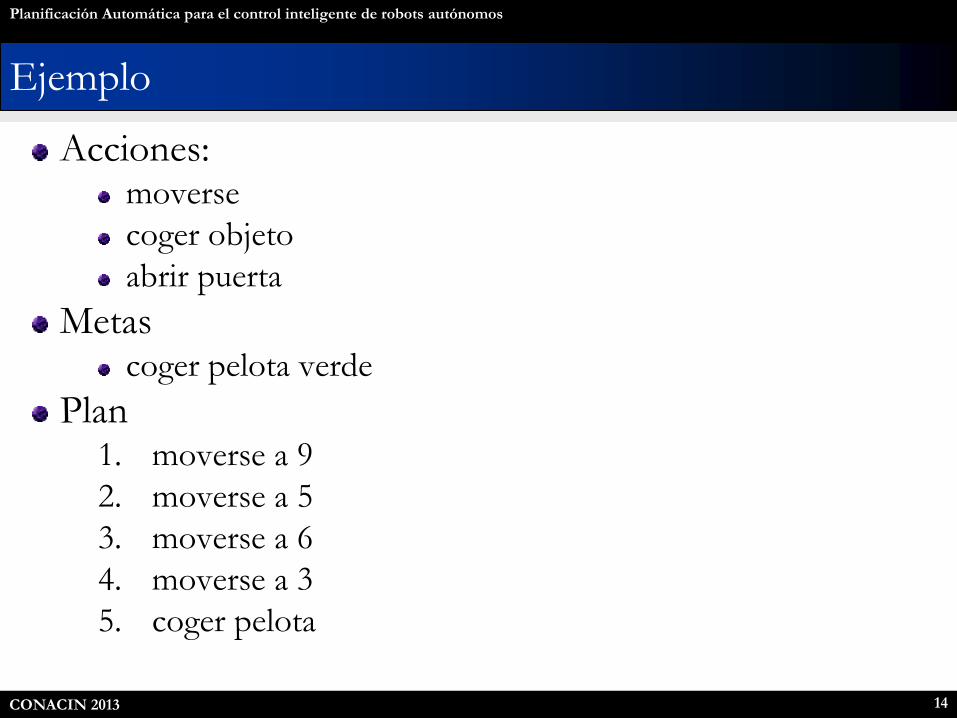
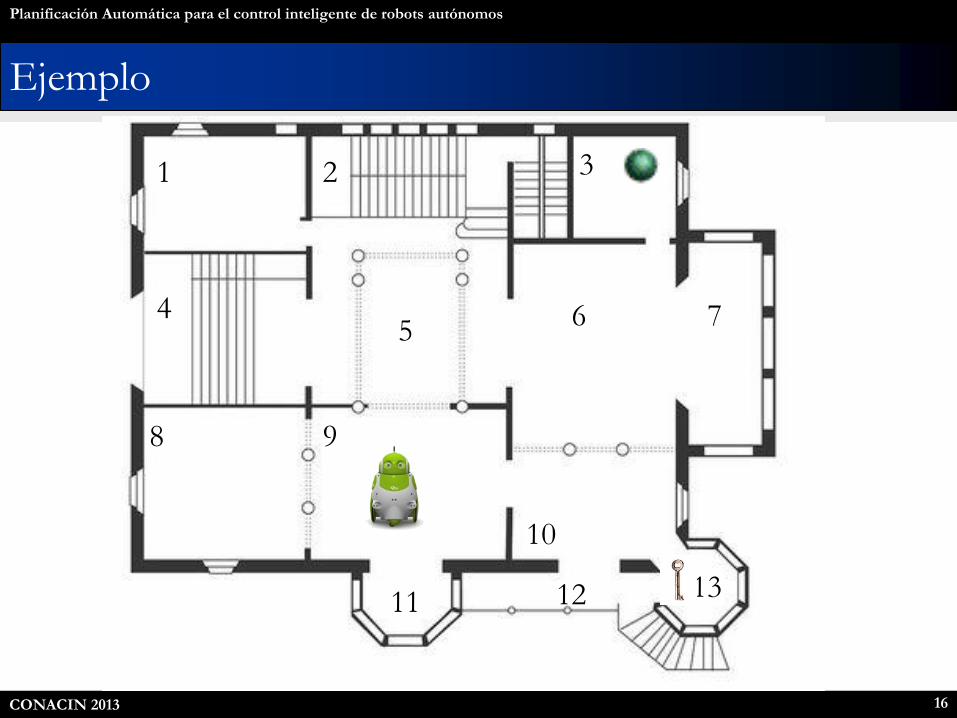
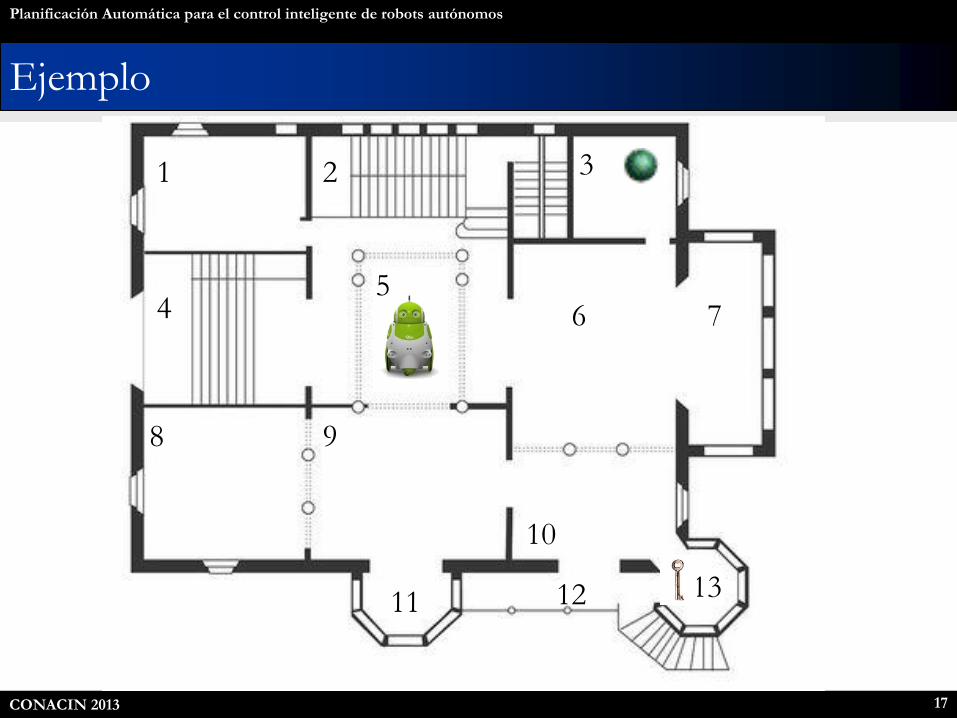
Acciones: moverse
coger objeto
abrir puerta
Metas coger pelota verde
Plan 1. moverse a 9
2. moverse a 5
3. moverse a 6
4. moverse a 3
5. coger pelota
14

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
15
1
5 4 7 6
9 8
11
10
12
3 2
13
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
16
1
5 4 7 6
9 8
11
10
12
3 2
13
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
17
1
5 4 7 6
9 8
11
10
12
3 2
13

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
18
1
5 4 7 6
9 8
11
10
12
3 2
13
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
Si la puerta de 3 está cerrada, nuevo plan
1. moverse a 10
2. moverse a 13
3. coger llave
4. moverse a 10
5. moverse a 6
6. abrir puerta
7. moverse a 3
8. coger pelota
19

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
20
1
5 4 7 6
9 8
11
10
12
3 2
13
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
21
1
5 4 7 6
9 8
11
10
12
3 2
13

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
22
1
5 4 7 6
9 8
11
10
12
3 2
13

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
23
1
5 4 7 6
9 8
11
10
12
3 2
13

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
24
1
5 4 7 6
9 8
11
10
12
3 2
13

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
25
1
5 4 7 6
9 8
11
10
12
3 2
13

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
26
1
5 4 7 6
9 8
11
10
12
3 2
13
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
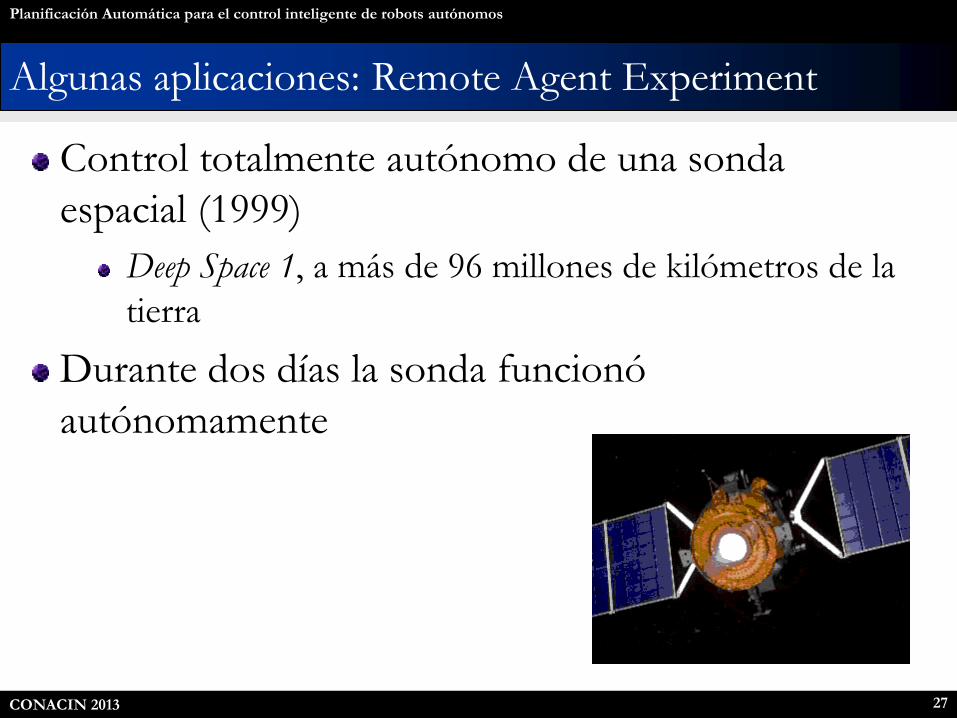
Algunas aplicaciones: Remote Agent Experiment
Control totalmente autónomo de una sonda
espacial (1999)
Deep Space 1, a más de 96 millones de kilómetros de la
tierra
Durante dos días la sonda funcionó
autónomamente
27
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
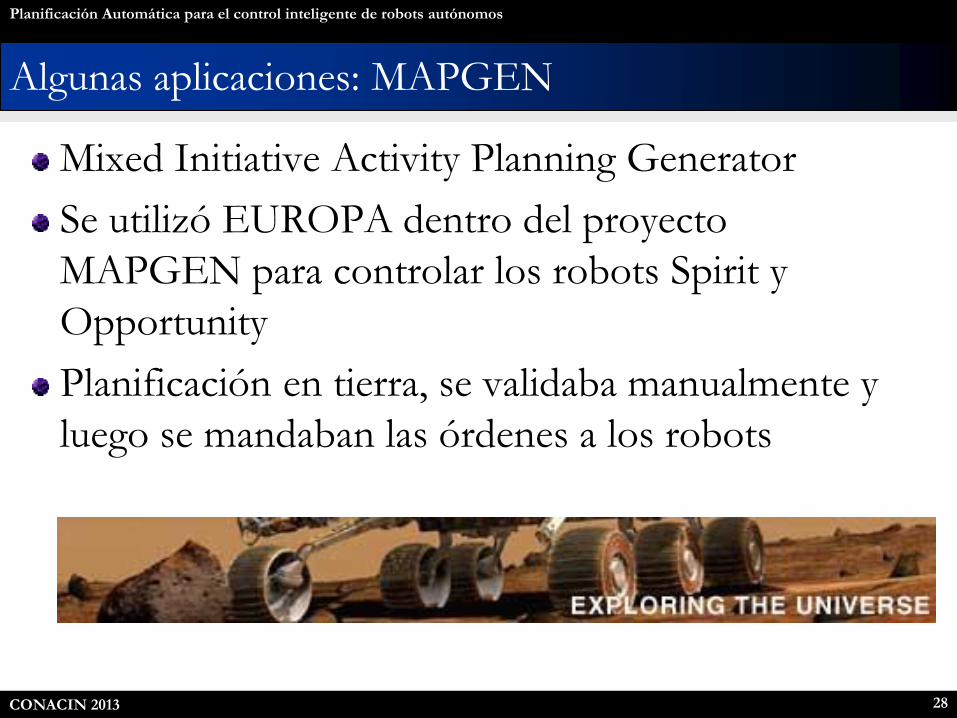
Algunas aplicaciones: MAPGEN
Mixed Initiative Activity Planning Generator
Se utilizó EUROPA dentro del proyecto
MAPGEN para controlar los robots Spirit y
Opportunity
Planificación en tierra, se validaba manualmente y
luego se mandaban las órdenes a los robots
28

CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Algunas aplicaciones: TIMI
Reparto multi-modal de mercancías
En corto y largo recorrido
29
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Inconvenientes
Encontrar un plan puede requerir tiempo
A veces es necesario reaccionar rápidamente
El resultado de un paso de un plan puede no ser
exactamente el esperado
Solución: arquitecturas de dos niveles
El bajo nivel se encarga de reaccionar rápidamente
(reactivo)
El alto nivel se encarga de la ejecución global del plan
(deliberativo)
30
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
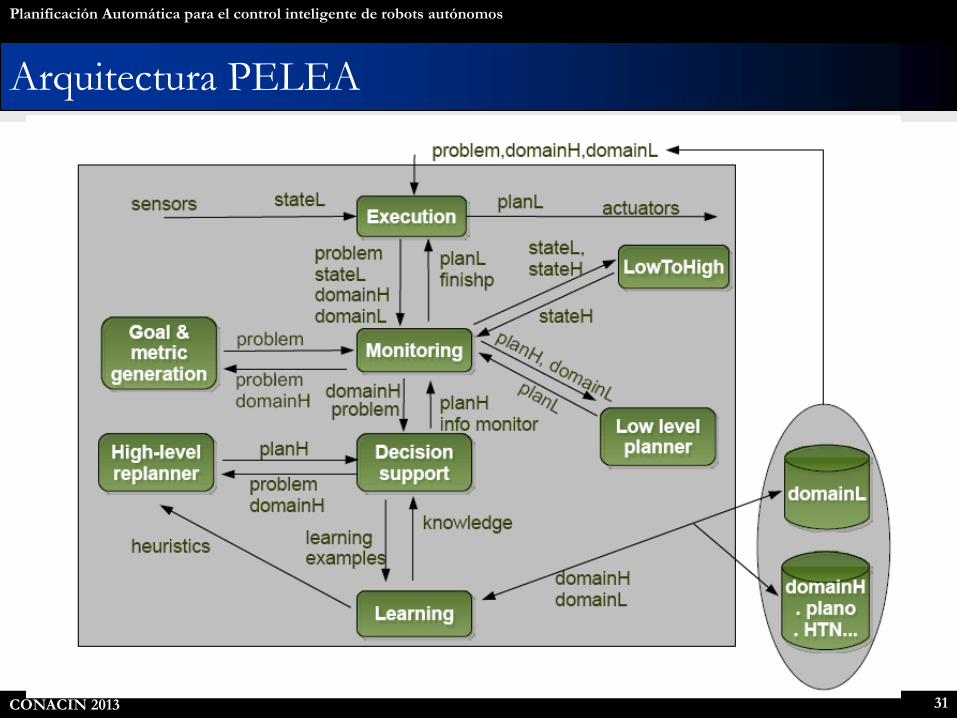
Arquitectura PELEA
31
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Módulos de PELEA
Ejecutor (Execution): interfaz con el robot y ejecución de acciones
Monitor: monitorización del plan
Conversor bajo-alto (LowToHigh): convierte el estado de bajo nivel al de alto nivel
Soporte a la decisión: llama al planificador y decide si el plan sigue siendo ejecutable
Planificador de bajo nivel: convierte el plan de alto nivel en comandos ejecutables por el robot
Aprendizaje: aprende de experiencias pasadas para mejorar el comportamiento
32
CONACIN 2013
Planificación Automática para el control inteligente de robots autónomos
Ejemplo
33