Practiques_Electricitat_Automatismes (2)
39
P P R R À À C C T T I I Q Q U U E E S S D D ’ ’ E E L L E E C C T T R R I I C C I I T T A A T T I I N N S S T T A A L L ∙ ∙ L L A A C C I I O O N N S S D D ’ ’ A A U U T T O O M M A A T T I I S S M M E E S S
-
Upload
ross-rodriguez -
Category
Documents
-
view
48 -
download
6
Transcript of Practiques_Electricitat_Automatismes (2)

PPRRÀÀCCTTIIQQUUEESS
DD’’EELLEECCTTRRIICCIITTAATT IINNSSTTAALL∙∙LLAACCIIOONNSS DD’’AAUUTTOOMMAATTIISSMMEESS

ÍNDICE
El contactor.................................................................................... Práctica 1Enclavamiento eléctrico................................................................. Práctica 2Contactor en cascada..................................................................... Práctica 3Inversor de giro.............................................................................. Práctica 4Conexión estrella/triángulo........................................................... Práctica 5Conexión estrella/triángulo con inversor de giro........................ Práctica 6Motor con resistencias estatóricas................................................ Práctica 7Motor trifásico en una línea monofásica...................................... Práctica 9Motor trifásico en una línea monofásica con inversor de giro.. Práctica 10Inversor de giro temporizado....................................................... Práctica 11Estrella/Triángulo temporizado................................................... Práctica 12Inversor de giro temporizado....................................................... Práctica 13Temporizadores: Semáforo........................................................... Práctica 14Motor Dahlander: Velocidad lenta.............................................. Práctica 15Motor Dahlander: Velocidad rápida............................................ Práctica 16Motor Dahlander: Velocidades Rápida/Lenta............................ Práctica 17Motor Dahlander: Rápido/Lento con inversor de giro.............. Práctica 18Frenado de motor por corriente continua................................... Práctica 22Motor de corriente monofásica de fase partida.......................... Práctica 23 Variador de frecuencia.................................................................. Práctica 24Variador de frecuencia: Entradas digitales................................. Práctica 25Variador de frecuencia: Entradas analógicas............................. Práctica 26Transformadores........................................................................... Práctica 27
Alberto
Rectángulo

El contactor eléctrico
PRÁCTICA 1:El Contactor
El contactor trifásico es un cuerpo que contiene una bobina que se accionacuando pasa una corriente a través de ella. Al accionarse pone en cortocircuito susterminales L1 con T1, L2 con T2 y L3 con T3. Asimismo cambiará el estado de suscontactos auxiliares. Los contactos L1-T1, L2-T2 y L3-T3 son contactos de potencia,mientras que los contactos auxiliares son de contactos de maniobra.
La bobina que va en el contactor es intercambiable, y se puede sustituir por otra deotra tensión, en cualquier caso siempre debe coincidir la tensión de la bobina con latensión de línea que empleemos.
Ya hemos hablado de losterminales T1, T2, T3, L1, L2 y L3como contactos de potencia. Losdemás terminales son A1, A2 y loscontactos auxiliares 13 y 14. A1 yA2 son la alimentación de la bobina,A2 siempre irá conectada al neutroen una línea monofásica y A1 a lafase cuando las circunstancias delcircuito lo requieran. Naturalmentecuando se conecten ambos terminalesa la alimentación la bobina comenzará a hacer su trabajo y el contactor se pondrá enmarcha. Los contactos auxiliares 13 y 14 son contactos normalmente abiertos. Cuando labobina está en reposo, o no tiene corriente, 13 y 14 están abiertos. Cuando hacemos pasarcorriente por la bobina, 13 y 14 se cierran.
Pág. 1

El contactor eléctrico
Enunciado:
En la práctica 1 nos piden que desarrollemos un circuito capaz de dar tensión a labobina de un contactor mediante un pulsador. El contactor deberá quedar activado cuandosoltemos el pulsador, es decir que lo tenemos que auto-alimentar. El circuito se detendrámediante un pulsador de paro de emergencia. Una bombilla nos indicará si el contactorestá activado o no.
Esquema:2
1
4
3
14
13
21
A2A1
24v F
N
S0
S1
K1
K1
H1
Descripción:
Cuando accionamos S1 circula corriente por la bobina, quedando esta alimentada.Instantáneamente se acciona el contacto auxiliar, 13-14, quedando cerrado. Utilizamoseste contacto auxiliar como auto-alimentación del circuito. Al accionar S0 cortamos todacirculación de corriente de manera que el contacto auxiliar de K1 vuelve a su estado dereposo normal abierto y el circuito vuelve al estado inicial. Como la bombilla está enparalelo con la bobina del contactor siempre que este se active se activará también labombilla.
Pág. 2
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1
K1
K1
H1

Enclavamiento eléctrico
PRÁCTICA 2:Enclavamiento eléctrico
En ciertas ocasiones en la industria es necesario desarrollar sistemas de seguridadque eviten que se puedan llevar a cabo dos acciones simultaneas que son opuestas. Porejemplo, una cinta transportadora puede tener que invertir el sentido de su marcha en unmomento dado. Se conseguirá cambiando el sentido de giro del motor, simplemente. Loque se debe evitar es que de forma accidental al motor de esta cinta le lleguen ordenesopuestas, no puede girar a la derecha y a la izquierda simultáneamente! A fin de evitarsituaciones de este tipo, se precisa el enclavamiento eléctrico. En él lo que ocurre es quetenemos dos contactores K1 y K2 y cuando uno esta activado no dejará al otro ponerse enmarcha. Supongamos un circuito que alimenta un motor que gira a derecha e izquierda.Supongamos que disponemos de dos contactores, uno de ellos, K1, está conectado demanera tal que cuando se active el motor empezará a girar a derecha y el otro contactor,K2, hará que el motor gire a izquierda. En este caso, con el circuito parado, podremosactuar sobre K1 o K2 y el circuito pondrá en marcha el motor. De lo que se trata, sihemos pulsado K1 y el motor se encuentra girando a derecha es de que el propio circuitoesté dotado de algún sistema que nos impida actuar sobre K2, evitando dar ordenesinversas al mismo dispositivo. De la misma forma Cuando K2 esté activo K1 no podráactivarse. Es decir que ambos contactores estarán enclavados entre sí. Además de losenclaves eléctricos existen enclaves mecánicos y programados. En cualquier caso lafunción es la misma.
Para crear enclavamientos eléctricos precisamos de más contactos auxiliares (enadelante "c.aux.") que los que trae nuestro contactor. Siempre que no tengamossuficientes c.aux. en el contactor, disponemos de cuerpos de contactos auxiliares. Estoscuerpos se encajan mecánicamente en el contactor, formando así una sola pieza. Elcuerpo de c.aux. se accionará siempre a la vez que el contactor de forma mecánica. Lafunción de este cuerpo es la de proporcionarnos un mayor control sobre el circuitodándonos cuatro c.aux más, que podrán ser normalmente abiertos y/o normalmentecerrados.
Enunciado:
Crear un enclavamiento eléctrico entre dos contactores. Disponemos de doscontactores, un pulsador de paro, dos pulsadores de marcha y dos cuerpos de contactosauxiliares.
Pág. 1

Enclavamiento eléctrico
Esquema:
Para hacer posible el enclavamiento, recurrimos a un cuerpo de contactosauxiliares del contactor. En él nos encontramos con un contacto auxiliar normalmentecerrado, entre otros, que nos sirve de forma ideal para nuestro cometido. Colocando elc.aux. De K2 en serie con la bobina de K1 evitaremos que K1 sea activada mientras queK2 está en marcha y viceversa. Para verlo más claro podemos imaginar que es lo que pasaen el circuito: al pulsar S2 la corriente es libre de circular hasta el borne 61 de K1, ycomo este se encuentra cerrado, en reposo, la corriente puede llegar hasta la bobina deK2. Al circular corriente por dicha bobina, se activa el contactor, invirtiendo en eseinstante el estado de todos sus contactos auxiliares. En el circuito sólo utilizamos doscontactos auxiliares de K2 (13-14 y 61/62)y dos de K1(13-14 y 61/62). Si analizamos elfuncionamiento de los contactos 13-14 vemos que 13 y 14 aux de K1, que es normalabierto, se cerrara cuando alimentemos la bobina K1 por medio del pulsador S1, demanera que la bobina quedará auto alimentada aunque soltemos S1. Por otro lado 61 y 62de K1 que es normal cerrado se abrirá, impidiendo el paso de la corriente hasta K2,incluso aunque pulsemos S2. Este estado se mantendrá hasta que desactivemos el circuitopor mediación de S0 (o cortando el suministro eléctrico de circuito de cualquier otromodo). Tras pulsar S0 el contactor que estuviese en marcha vuelve a su estado de reposoy de nuevo sería posible activar cualquiera de los dos contactores.
Pág. 2
14
13
2
1
A2
A1
24v F
N
S0
S1
K1
K1
H1 H2
K2
K2
S2
A1
A2
1
2
13
14
3
4
61
62
K1K2
61
62
2
1
4
3

Contactor en cascada
PRÁCTICA 3:Contactor en cascada
De la misma forma que vimos cuando era necesario construir un enclavamiento,en otras circunstancias puede ser necesario crear una "cascada" de contactores. Llamamoscascada a una combinación de contactores en la que para que K2 se active, K1 deberáestar activado previamente, para que K3 se active K2 (y K1) deberán estar activadospreviamente, y así todo contactor depende del anterior.
La utilidad práctica de este tipo de conexionado es amplia, pero podemosimaginar un caso concreto. Por ejemplo, imaginemos un deposito industrial para químicacon una capacidad superior a 5000 litros. Imaginemos que debe suministrar tres plantas,aunque no siempre están las tres activas, a veces sólo hay dos y otras sólo una. El circuitohidráulico de rellenado cuenta con 3 bombas hidráulicas independientes, pero noqueremos usar más que las necesarias, si solo hay una planta funcionando solo habrá unabomba abasteciendo el depósito, si son dos plantas las que están en marcha, se pondríatambién en marcha la segunda bomba. En este caso sería una opción poner las tresbombas conectadas eléctricamente en cascada. Naturalmente se trata de un casoimaginario y se entiende que las plantas siempre se pondrían en marcha en ordenascendente.
Cuando un contactor pone en marcha unmotor o cualquier otro dispositivo de potencia, esnecesario realizar un esquema de potencia queaclare el circuito. Siempre que haya potenciautilizaremos un esquema para la maniobra y otropara la potencia, serán dos esquemas claramenteseparados y tienen como nexo de unión loscontactores, que son activados desde el circuito demaniobra pero dan una acción directa sobre elcircuito de potencia.
Cuando conectamos un motor es muyconveniente colocar un guardamotor, dispositivoeste que protegerá térmicamente al motorprolongando su vida y a la vez advirtiendo deposibles fallos en el mantenimiento.
Pág. 1
Ilustración 1Guardamotor

Contactor en cascada
Enunciado:
Conectar tres contactores en cascada y hacer que K3 active un motor. Dotar elcircuito de un guardamotor y una bombilla que indique si éste se ha calentado.
Esquema:2
1
43 1413
21A2A1
24vF
N
S0
S1
K1
K1
H1 H2
K2
K2
S2
A1A2 12
131434 43 1413
21A2A1
S3
K3
K3
H3
FR19596 FR1
9798
H412
Descripción:
En el esquema vemos FR1como contacto auxiliarnormalmente cerrado, se trata delc. aux del guardamotor. Cuando elguardamotor determine que elmotor se ha calentado en exceso,abrirá tanto sus contactos depotencia como sus contactosauxiliares n/c, desconectando asícompletamente el circuito.Seguidamente el pulsador deparada n/c, y a continuación S1.
Pág. 2
Ilustración 2 Esquema de maniobra
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1
K1
K1
H1 H2
K2
K2
S2
A1
A2
1
2
13
14
3
4 4
3
14
13
2
1
A2
A1
S3
K3
K3
H3
FR195
96FR1
97
98
H4
1
2
Ilustración 3 Esquema de potencia
A2
A1
K3
1 3 5
2 4 6
U1 V1 W1
FR1
M1
1 3 5
2 4 6
3x230v
L1
L2
L3 3x230v

Contactor en cascada
S1 pone en marcha K1 y este se auto-alimenta. Asimismo aparece tensión en el borne 3de S2 -hasta que no se pulsa S1 no la hay- y por este método tan sencillo creamos lacascada. Vemos como efectivamente K2 depende de que K1 esté activo para poderactivarse. El otro contacto auxiliar de FR1 es un contacto n/a que en principio puedeservir para activar un avisador luminoso que indique el calentamiento del motor.
En esta práctica vemos por primera vez un esquema de potencia. Representamosuna línea trifásica mediante tres líneas L1 L2 L3 (o R, S, T) y indicamos que es corrientealterna y su voltaje. Vemos como la bobina hace de nexo entre el esquema de potencia yel de maniobra, aquí también aparece dibujada y asociada a los contactos de potencia L1-T1, L2-T2 y L3-T3. Cuando K1 se active estos contactos se cerraran, permitiendo el pasode la corriente por el guardamotor y por el motor.
Para conectar el motor hemos empleado el modo "en triángulo" o "directo" que noes mas que conectar sus bobinas en serie y conectar cada cable de la trifásica R-S-T entrebobina y bobina. Es mucho más aclaratoria una imagen.
Estrella Triángulo
Pág. 3

Inversor de giro
PRÁCTICA 4:Inversor de Giro
Cuando conectemos un motor es muy probable que queramos que en algúnmomento cambie el sentido de su marcha. Para ello podríamos ayudarnos de un circuitocomo el presentado a continuación, que invierte el giro de un motor mediante dospulsadores de sentido de giro y uno de paro. Para cambiar el sentido del giro de unmotor trifásico, es necesario cambiar una de sus fases, no importa cual, puesto quecambiemos la que cambiemos el campo magnético generado en los bobinados invertirá sumarcha. Pensemos en tres pares de polos, llamados 1, 2 y 3 y supongamos que están a120º unos de otros. Si ponemos en marcha la bobina 1 y luego la 2 ya estamos creando unsentido de giro, el campo magnético está girando en orden ascendente respecto a lasbobinas, supongamos que hemos numerado las bobinas en el sentido de las agujas delreloj, entonces el motor estaría girando a la derecha. Vemos que cuando se active labobina 3 está continuando ese movimiento que ya ha comenzado en un sentidodeterminado. Veamos que ocurre si cambiamos la bobina 1 por la 2, es decir, ahora seactiva primero la 2 y luego la 1. Veríamos que, como los pares de polos de las bobinas nohan cambiado de sitio, lo que sí cambia es el orden en que giran, comenzando la bobina 2,luego la 1 y finalmente la 3 y así repetidamente. Habríamos invertido el orden y por tantoel sentido del giro. No olvidemos que el análisis en profundidad de lo que ocurre en cadabobina durante cada instante es más complejo, pero esta sencilla explicación nosaproxima a entender el por qué de la inversión de giro.
Enunciado:
Crear un inversor de giro. Contamos con dos pulsadores para la puesta en marchaen cada sentido, un pulsador de paro, un guardamotor, tres contactores y 3 avisadoresluminosos.
Pág. 1

Inversor de giro
Pág. 2
Ilustración 1 Esquema de maniobra
14
13
2
1
A2
A1
24v F
S0
S1
K1
K1
H1 H2
K2
K2
S2
A1
A2
1
2
13
14
3
4
61
62
K1K2
61
62
95
96
FR1
K1 K2
53
54 54
53
A2
K3
A1
2
1
H3
FR1 97
98
2
1
4
3
Ilustración 2 Esquema de potencia
1 3 5
2 4 6
U1 V1 W1
FR1
M1
1 3 5
2 4 6
3x230v
L1
L2
L3 3x230v
2 4 6
1 3 5
K2
A1
A2
2 4 6
1 3 5
K3
A1
A2
A2
A1
K1

Inversor de giro
Descripción:
Vemos que la maniobra de esta práctica es un sencillo enclavamiento como el quevimos y explicamos en la práctica 2. Para comprender el motivo de porque ponemos elcontactor 3 deberíamos referirnos a la posición física del guardamotor en el circuito. Elguardamotor va colocado de forma directa en las salidas del contactor que alimente elmotor. Esto quiere decir que tienes tres pines que, sin mediación de cables, se conectan alcontactor. Esta forma de conexión, que puede ser práctica para ciertos casos, no es paranosotros más que un tanto engorrosa, puesto que no nos deja sacar cables del contactordonde va colocado el guardamotor. Por lo tanto lo que hacemos es poner un contactoradicional donde conectaremos el guardamotor.
Llamamos a los contactores K1 o K_derecha, K2 o K_Izquierda y K3 oK_de_Línea. Como K_de_Línea se tiene que activar siempre que uno de los otros doscontactores esté activo, colocamos un cuerpo de contacto auxiliares a cada uno de loscontactores K1 y K2 y utilizamos un c. aux n/a de los contactores K1 y K2 en paralelopara alimentar la bobina de K3. De esta forma siempre que K1 o K2 esté en marcha,también lo estarán sus contactos auxiliares y por lo tanto K3 se pondrá también enmarcha. De esta forma queda explicado el esquema de maniobra.
En el esquema de potencia vemos como el guardamotor está colocado justo antesdel motor. Así es como debe ser para que nada interfiera en la correcta protección delmotor. Por lo demás vemos que el contactor K1 coge las fases en un orden determinado yque K2 las coge cambiando una de las fases por otra respecto a K1, con ello está hecho elcambio de giro, todo esto pasa por K_de_Línea y llega al motor. Como K1 y K2 estánenclavados eléctricamente entre sí, no es posible el cortocircuito entre las fases invertidas.
En esta práctica tomamos mediciones de las intensidades del motor en régimennormal, durante la inversión de giro, y en el arranque. Asimismo hemos calculado lapotencia disipada para cada conexión. Con una tensión de línea de 223v, los resultadosfueron los siguientes.
Régimen de giro I(A) P.ap*(VA)Normal 1,53 591Arranque 4,22 163Giro 5,94 2294
*La potencia aparente (P.ap) es el producto de la tensión de línea por la intensidad delínea por la raíz de 3 y se expresa en VA (Volt-Amperes)
Pág. 3

Inversor de giro
En la práctica observamos que la potencia necesaria para que el motor girenormalmente está por debajo de la potencia indicada en la chapa característica del motor.Esto es debido a que el motor gira en vacío o sin carga. Al aplicar carga al motor,engranándolo a una máquina o haciendo que mueva algo, una polea por ejemplo,veríamos aumentar la potencia que precisa para moverse.
En el arranque la intensidad que solicita es mayor, la explicación es compleja,pero podemos resumirlo como que necesita más fuerza para empezar a moverse que paramantener su movimiento. Lo mismo ocurriría en el giro o cambio de sentido, la potenciarequerida se multiplica hasta casi x4 para los instantes del giro. Esto debería ser tenido encuenta en máquinas que tengan que arrancar o cambiar su sentido de giro de formacontinuada, dotándolas si es posible de un sistema de embrague o similar para nosobrecargarlas en exceso. También debe ser tenido en cuenta que la intensidad que circulapor el motor circula por la línea hasta él, de manera que si ponemos en marcha variosmotores al mismo tiempo corremos el riesgo de sobrecargar la línea y provocar la caídadel magnetotérmico.
Resumiendo podemos decir que contra más carga se aplica al motor, máspotencia va a demandar.
Pág. 4

Conexión estrella-triángulo
PRÁCTICA 5:Conexión estrella-triángulo
En la práctica 4 veíamos como al arrancar un motor la potencia requerida esmayor. Por este motivo, y porque algunas veces no es necesario que un motor de toda supotencia, se crea la conexión en estrella. En esta forma de conexión la tensión paracada bobina del motor es la tensión de línea dividida por raíz de 3, bajando de estamanera también la intensidad que circula por cada bobina y por tanto la potencia disipadapor el motor.
También puede ser útil cuando disponemos de un motor que está construido parafuncionar a una tensión trifásica determinada, y nosotros no disponemos de una línea deesas características pero si de una línea que es raíz de tres veces superior. Sería el caso deun motor preparado para funcionar a 230v si nosotros solo contáramos con una líneatrifásica de 400v. En ese caso al conectar en estrella la tensión que recaería sobre lasbobinas sería Tensión de línea (Vl) partido raíz de tres. Vemos que efectivamente 400v /1.73 es 230v.
Un propósito importante de la conexión en estrella dentro de las aplicacionesindustriales es el encendido de motores. Existen motores eléctricos trifásicos sumamentepotentes, cuyo consumo de corriente es elevadísimo. Como todos los motores en elmomento de arrancar disparan su intensidad multiplicándose por hasta seis veces, esbuena idea arrancar en estrella para más adelante, cuando se requiera toda la potencia,continuar en triángulo.
Cuando un motor trabaje por debajo de su potencia nominal se puede decir quetrabaja en tensión reducida. Es interesante aclarar que no por trabajar en tensión reducidaun motor va a girar a menos RPM. Las RPM sólo variarán con la frecuencia de lalínea, ya que efectivamente el campo magnético girará a la misma velocidad -puesto quela red es la misma- tanto si conectamos a 230v 400v o 125v. Al reducir la tensión loúnico que quedará reducido es la potencia del motor. Menos tensión, menos corriente ymenos potencia. RPM's se mantienen (siempre que la potencia sea suficiente paraaccionar el rotor del motor).
Pág. 1

Conexión estrella-triángulo
Enunciado: Crear una conexión estrella-triángulo mediante tres contactores K_estrella,
K_triángulo y K_de_línea. Dotar al circuito de pilotos que indiquen su modo deconexión. Dotar también de un guardamotor con piloto de aviso en caso decalentamiento.
Maniobra
Descripción:
En primer lugar la maniobra está constituida por un sencillo enclavamiento. Comono queremos que el motor arranque en directo y en estrella simultáneamente (estoequivaldría a un cortocircuito) debemos asegurarnos de que K_Estrella sólo se activecuando K_Triángulo esté en reposo y viceversa. Además los contactos auxiliares en seriecon K_Línea nos impiden que K_Línea se active a menos que uno de los dos contactoresK_estrella o K_triángulo esté activo.
Pág. 2
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1
KTri
K1
H1 H2
K2
KEst
S2
A1
A2
1
2
13
14
3
4
61
62
K1K2
61
62
95
96
FR1
K1 K2
53
54 54
53
A2
KLinea A1
2
1
H3
FR1 97
98

Conexión estrella-triángulo
En el esquema de potencia vemos que cuando se active K_triángulo los terminalesdel motor se conectarán efectivamente en triángulo, es decir: U1 con W2, V1 con U2 yW1 con V2. Con K_Línea activado el motor queda conectado en triángulo.
Cuando es K_estrella quien está activo, con K_línea también en funcionamiento,vemos como conectamos cada línea a un terminal de cada bobina del motor y los otrostres terminales de las tres bobinas quedan unidas entre sí, formando de esta manera laconexión en estrella.
Observemos también la colocación del guardamotor y K_línea dentro del esquemade potencia, ya que no es casual que ambos componentes se encuentren justo antes delmotor. También podían haber sido colocados por encima de todo el circuito de potencia yigualmente desarrollarían su función, pero ocurre que en ese caso pasaría por ellos toda laintensidad de línea, que es mayor o igual que la de fase. Estando colocados donde lo estánen el esquema soportan únicamente la intensidad de fase, siendo de este modo un circuitomás económico y duradero puesto que estos dos componentes no soportarán tantacorriente.
Pág. 3
A2
A1KTriangulo1 3 5
2 4 6
U1 V1 W1
FR1
M1
1 3 5
2 4 6
3x230v
L1
L2
L3 3x230v
2 4 6
1 3 5KEstrella A1
A2
2 4 6
1 3 5KLinea A1
A2
W2 U2 V2

Conexión estrella-triángulo
IL(A) IF(A) VL(v) VF(v)Triángulo arranque 3,23 1,7 225 225Triángulo giro normal 1,58 0,92 225 225Estrella arranque 1,28 1,22 225 130Estrella giro normal 0,34 0,34 225 130
Según la tabla se confirma que Vf con la conexión en estrella es:
Comprobamos también que en conexión triángulo:
Pág. 4
A2
A1KTriangulo
1 3 5
2 4 6
U1 V1 W1
FR1
M1
1 3 5
2 4 6
3x230v
L1
L2
L3 3x230v
2 4 6
1 3 5KLinea A1
A2
W2 U2 V2
IL
If
En este caso Klinea y el FR1 soportarian toda laintensidad de Linea. Esto se puede evitar simplemente conectandolos justo antes del motor, de manera que a través de ellos solamentepase la intensidad de fase
I
VF=VL3
IF= IL3

Conexión estrella-triángulo
Vemos por tanto que la intensidad de fase en estrella es mucho menor que laintensidad en triángulo, y también como la intensidad se dispara en el arranque, siendoaproximadamente un 100% mayor. Veamos ahora la tabla de potencias, calculada a partirdel consumo de intensidad, la tensión de línea y el cos del motor.
Pap(VA)
VL·IL· 3
Pre (Var)
VL·IL· 3 ·cos
Pac (w)
VL·IL· 3 ·sen
Triángulo arranque 1257 691 1044Triángulo normal 614 337 509Estrella arranque 498 273 413
Estrella giro normal 131 172 109
Pág. 5

Inversor de giro estrella-triángulo
PRÁCTICA 6:Inversor de giro estrella-triángulo
Para realizar esta práctica combinamos las dos anteriores. En la maniobra tendremos unenclavamiento doble. Por un lado enclavamos la conexión estrella/triángulo y por otro el sentidoizquierda/derecha. Para proteger el motor utilizamos por primera vez un disyuntor en lugar delguardamotor de otras prácticas. Con este nuevo elemento de protección aseguramos de forma másefectiva la integridad de nuestro motor, ya que el disyuntor protege tanto por exceso detemperatura como por exceso de intensidad. La construcción del disyuntor es similar a la delcontactor, cuenta con una entrada y una salida trifásica así como con dos contactos auxiliares para lamaniobra, uno de ellos n/c y el otro n/a. Para asegurar el circuito conectaremos el disyuntorinmediatamente antes del motor siempre que sea posible y utilizaremos un contacto auxiliar demanera tal que cuando se active el disyuntor desconecte la maniobra y caiga la potencia. Ademáspodemos aprovechar el otro contacto auxiliar para, por ejemplo, encender un piloto que servirá paraindicar el calentamiento. Para rearmar el disyuntor tras una desconexión, hay dos maneras:
-Rearmarlo automáticamente, utilizando la característica de automático del disyuntor. Eneste caso cuando el disyuntor se enfría se vuelve a armar aunque se volverá a desconectar si elproblema persiste.
-Rearmarlo manualmente, el disyuntor necesita que se pulse un botón para volver afuncionar, de esta manera aseguramos que el usuario o técnico de mantenimiento sea consciente dela desconexión para una posible revisión.
Los motivos para que se desconecte el disyuntor pueden ser variados. Una sobrecarga porcortocircuito hará que salte la protección de forma inmediata. El deterioro del aislante de losdevanados del motor provocara un consumo excesivo de corriente, y a la vez una disminución de lapotencia que ofrezca el motor. La falta de lubricante en el circuito mecánico que mueva el motorprovocara un calentamiento excesivo de este. Todos estos motivos y otros serán suficientes para queel disyuntor quede desconectado.
Enunciado:Crear circuito en el que mediante 4 pulsadores de marcha hagamos girar un motor trifásico a
izquierda y derecha en estrella o triángulo. Proteger el motor con un disyuntor.
Pág. 1

Inversor de giro estrella-triángulo
Como vemos el circuito de maniobra no es más que la combinación de anteriores esquemas,en este caso combinamos dos pares de contactores enclavados entre sí, K1 enclavado con K2 y KEstenclavado con KTri. Como símbolo nuevo aparece el disyuntor, aunque muy parecido alguardamotor en el esquema de maniobra, en el de potencia sí que veremos alguna diferencia más.Cabe comentar que el disyuntor normal abierto delante de la parte de maniobra es correcto, ya queel fabricante del disyuntor ha considerado que su posición en reposo sería la de “apagado”, es decir,con sus contactos de potencia abiertos y los de maniobra como vemos en el esquema. Es por elloque cuando se arma el disyuntor el circuito empieza a funcionar normalmente, mientras que cuandoel disyuntor “salta” por exceso detemperatura/intensidad sus contactos sequedan como vemos en el esquema.Aclarado este concepto, vemos elesquema de potencia, a la derecha.
En él vemos el motor conectadosegún los contactores activos en estrellao triángulo, siendo alimentado siemprepor KI o KD, dependiendo también decual sea el que está activado en esemomento. El disyuntor colocado antesdel motor protege a este contra excesosde intensidad o temperatura.
Pág. 2
Ilustración 1 Esquema de maniobra
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1
K1
K1
H1 H2
K2
K2
S2
A1
A2
1
2
13
14
3
4
61
62
K1K2
61
62
13
14
DY1
2
1
H5
DY1 23
24
62
61
KEst KTri
62
61
4
3
14
13
2
1
A2
A1
S4
KEst
KEst
H4H3
KTri
KTri
S3
A1
A2
1
2
13
14
3
4
Ilustración 2 Esquema de potencia
A2
A1
K1
1 3 5
2 4 6
L1
L2
L3 3x230v
2 4 6
1 3 5
K2
A1
A2
W2 U2 V2
A2
A1KEstrella 1 3 5
2 4 6
3x230v
2 4 6
1 3 5
M1
DY1
U1 V1 W1
2 4 6
1 3 5
KTriangulo A1
A2
>I >I >I

Motor mediante resistencias estatóricas
PRÁCTICA 7:Motor mediante
resistencias estatóricas
Como ya hemos visto en múltiples ocasiones, puede ser conveniente que para un momento dadonecesitemos utilizar solo un tanto por ciento de la potencia de un motor. Vimos que en el arranque lapotencia puede dispararse, dándonos unos consumos de corriente muy elevados. Otras veces necesitaremossimplemente que el motor gire sin carga, para lo cual no precisaremos de toda su potencia. En cualquiercaso, siempre que queramos reducir la potencia de un motor podemos hacerlo mediante resistenciasestatóricas. Para ello conectamos resistencias en serie con los devanados del motor, en el estátor, deforma que la corriente que circule por cada devanado lo hará además a través de las resistencias. Endefinitiva lo que hacemos es reducir la corriente que pasa por las bobinas y por lo tanto disminuir lapotencia que va a disipar el motor. Contra mayor sean las resistencias, mayor será la caída de tensión quese de en ellas, y quedará una tensión menor para las bobinas del motor. En cualquier caso, aumentando laresistencia total del circuito vamos a disminuir su corriente.
Para la maniobra utilizaremos 3 contactores en cascada. Para activar K2 es necesario que K1 estéactivado; para activar K3 es necesario que K2 esté activado. Un disyuntor protege el motor y enciende unavisador luminoso en caso de fallo.
Pág. 1
Ilustración 1 Esquema maniobra
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1
K1
K1
H1 H2
K2
K2
S2
A1
A2
1
2
13
14
3
4 4
3
14
13
2
1
A2
A1
S3
K3
K3
H3 H4
1
2
24
23DY1DY1
14
13

Motor mediante resistencias estatóricas
Para la potencia utilizaremos las resistencias conectadas en serie con el motor. Haremos que lacorriente pase a través de las resistencias y a medida que vayamos activando contactores cada vezofreceremos menos resistencia al pasaje de la corriente.
Cuando K1 está activo la corriente nopuede pasar por otro lugar que a través detodas las resistencias hasta llegar al motor. Alactivar K2 estamos obviando el primer grupode resistencias, la corriente sólo pasará por elsegundo. Finalmente cuando pulsamos K3 lacorriente va directamente al motor, obviandolos dos grupos de resistencias.
Es preciso calcular el paso de lacorriente por el motor para determinar lapotencia que vamos a necesitar para lasresistencias. Como la corriente que circulará através de estas resistencias será toda la quevaya al motor, puede ser bastante elevada,dependiendo de nuestro motor, así quevigilaremos las potencias de todo el conjunto.
La conexión del motor podría ser enestrella o triángulo, aunque seríarecomendable no conectarlo en modo detensión reducida ya que mediante el uso deresistencias en el estátor ya estamos limitando la capacidad del motor. Si adicionalmente lo conectamos entensión reducida es posible que el motor quede muy por debajo de sus posibilidades.
Pág. 2
Ilustración 2 Esquema de potencia
A2
A1
K1
1 3 5
2 4 6
L1
L2
L3 3x230v
2 4 6
1 3 5
K2
A1
A2
3x230vM1
DY1
U1 V1 W1
2 4 6
1 3 5
>I >I >I
A2
A1
K3
1 3 5
2 4 6
R1, 2, 3
R4, 5, 6

Motor mediante resistencias estatóricas
En las siguientes gráficas vemos como a medidaque disminuye la resistencia que ofrecemos al paso de lacorriente, esta efectivamente se va elevando,aumentando desde 1'36A hasta 1'57A. Asimismo lacaída de tensión en la resistencia disminuye linealmentesegún el valor de dicha resistencia.
A medida que disminuimos la caída de tensión en lasresistencias estatóricas, aumentamos la caída de tensiónen el motor, y si a esto añadimos que vamos aumentandotambién la intensidad de línea, el resultado es un aumentode la potencia disipada por el motor. Puesto que lapotencia es producto de la IL y la VL, veremos como paracada pequeño incremento de intensidad o tensión -enrealidad ambos parámetros crecerán simultáneamente-habrá un gran incremento en la potencia disipada.
La resistencias utilizadas para la práctica fueron de 8Ω>50W.
Pág. 3
Max R Med R Min R0
2,5
5
7,5
10
12,5
15
17,5
20
22,5
Relacion VR - IL
VR(v)IL(A)
Max R Med R Min R0
50
100
150
200
250
300
350
400
450
500
550
600
650
Relación V-Pap.
Vmotor(v)Pap Motor (w)

Motor trifásico a línea monofásica
Práctica 9:Conexión de un motor trifásico
a una línea monofásica
Siempre que sea posible conectaremos los motores trifásicos a líneas trifásicas, obviamente,no obstante, para casos particulares en los que la urgencia apremie y no dispongamos de una lineatrifásica también es posible conectarlos en una corriente monofásica o bifásica, aunque deberemosconsiderar en ese caso una considerable perdida en la relación consumo/rendimiento de nuestromotor.
Para que un motor asíncrono de rotor en cortocircuito gire lo tiene que hacer su campomagnético, si el campo magnético que creamos en el estátor no adquiere un sentido de giro el rotordifícilmente se moverá. En una corriente trifásica tenemos cada línea separada 120º de la anterior,de manera que cuando conectamos el motor la polarización de los devanados del estátor crean uncampo magnético con un sentido de giro. Dicho sentido de giro dependerá de como conectemoscada línea. Al aplicarlo las líneas de fuerza actúan sobre rotor y mediante fuerzas electromagnéticasel rotor comenzará a girar en el sentido que lo haga el campo magnético, aunque siempre un pocopor detrás de él. Por esta razón se llama “asíncrono” y la diferencia entre las rpm's del campomagnético y las rpm's del rotor, se llama “deslizamiento”.
En el caso de la corriente monofásica no tenemos ningún desfase, puesto que tenemos unasola línea. La manera de hacer que el motor gire es aplicando un desfase sobre nuestra única línea.Para ello conectaremos el motor en triángulo y conectaremos un condensador en paralelo con undevanado, tal y como muestra la figura.
Habremos creadoun desfase en uno de losdevanados del motor y asíconseguiremos que gire,aunque la potencia delmotor será deaproximadamente un 60%de la nominal.
Para calcular la capacidad de nuestro condensador será necesario aplicar la siguientefórmula:
Pág. 1
C1=70F ∗Kw

Motor trifásico a línea monofásica
De manera que la capacidad del condensador que necesitemos va a depender directamente dela potencia de nuestro motor en esta relación. Si, por ejemplo, tenemos un motor de 2Kwpondremos un condensador de 140uF y si nuestro motor es de 500w el condensador será de 35uF.
La maniobra consta de un simple accionamiento de un contactor auto-alimentado que darápaso a la corriente al motor. Cuenta asimismo con un disyuntor como elemento protector del motor.
Pág. 2
Ilustración 1 Esquema de maniobra
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1
K1
K1
H1
DY1
14
13
24
23DY1
H2
1
2
Ilustración 2 Esquema de potencia
A2
A1
K1
1 3 5
2 4 6
3x230vM1
DY1
U1 V1 W1
2 4 6
1 3 5
>I >I >I
C1
F 230v
N

Motor trifásico a línea monofásica
Conviene aclarar que el motor utilizado conectado en triángulo es de la misma tensión que lalínea, aunque esta sea monofásica.
Como vemos en el esquema, el desfase provocado por C1 generará un sentido en el giro delcampo magnético creado en los devanados del motor haciendo que éste gire.
En la siguiente tabla observamos las Intensidades que circulan por cada devanado del motorasí como las tensiones entre cada devanado y neutro.
If 0,88AIn 0,9AIu1 0,86AIv1 2,67AIw1 3,01A
Vu1n 228vVv1n 249vVw1n 247v
Aunque el motor funcionaría, tengamos en cuenta la Intensidad máxima nominal. Para elcaso de nuestro motor es de 3,20A, con lo cual vemos que estamos muy ajustados a dicho máximo asolo 0,19A para alcanzarlo. Y esto sin carga, se entiende que al aplicar alguna carga al motor laintensidad aumentará.
Además de eso vemos como la intensidad de los distintos devanados es diferente, con lo cualnos imaginamos que el motor trabaja de forma desequilibrada. El rendimiento en estas condicionesserá pobre.
En cualquier caso, antes de conectar un motor trifásico a una línea bifásica omonofásica, deberíamos considerar:
-Peligro de dañar el motor por sobre-intensidad
-Una reducción aproximada al 60% de la potencia nominal
-Un aumento del consumo de corriente.
-Ruidos y vibraciones anormales, dadas por el desequilibrio entre fases.
En la próxima práctica vemos como invertir el sentido del giro del motor trifásico en líneamonofásica.
Pág. 3

Motor trifásico a línea trifásica con inversor de giro
Práctica 10:Conexión de un motor trifásico
a una línea monofásica con inversor de giro
De manera similar a la práctica anterior, conectamos un motor trifásico a una lineamonofásica usando un condensador. Para invertir el giro simplemente utilizaremos dos contactores.Veamos el esquema de potencia.
Esquema de potencia
U1 siempre es alimentado por la fase, V1 siempre alimentamos desde el neutro. Es en W1donde alimentamos, siempre a través del condensador, desde fase o neutro para obtener un sentidode giro u otro.
Igual que hemos conectado el motor en triángulo, también podemos conectarlo en estrella,aunque la potencia obtenida será menor. Además las intensidades que circularán por los devanadospara una conexión en estrella será tan elevada que nos superará la nominal, así que deberá ser tenidoen cuenta.
En definitiva, si a la descompensación que existe entre fases por el hecho de conectar a unalínea monofásica le añadimos una conexión en potencia reducida o estrella, tendremos un motor querinde muy poco y que además tiene tendencia a quemarse por sobreintensidad.
Efectivamente en las pruebas realizadas tomamos mediciones de las diferentes intensidades,viendo como la mayor I en conexinado triángulo era de 2,98A, que aunque se acerca mucho a la
Pág. 1
A2
A1
K1
1 3 5
2 4 6
3x230vM1
DY1
U1 V1 W1
2 4 6
1 3 5
>I >I >I
C1
F 230v
N
2 4 6
1 3 5
K2
A1
A2

Motor trifásico a línea trifásica con inversor de giro
Imáx nominal de 3,20 no llega a superarla. Sin embargo para la conexión estrella vemos como laintensidad mayor obtenida supera la Imáx nominal, ya que alcanzamos hasta 3,3A, y para elmomento del cambio de giro hasta 4,4A. Todo esto sin carga. De modo que sí, es posible conectarun motor trifásico en monofásica, pero ya sabemos los peligros que ello conlleva.
No olvidemos que para la conexión en estrella la potencia activa es menor que la obtenida entriángulo. Esto se refleja también en el cálculo del condensador que necesitará nuestro motor paraeste conexionado. De forma análoga a la práctica anterior calculamos el nuevo condensador:
Por lo tanto si la nueva potencia es 0'109 Kw la nueva capacidad del condensador quenecesitamos es de 70uF * 0'109 = 7'6uF
Para el circuito de maniobra, al igual que otras veces, recurrimos al enclavamiento eléctricopara asegurar que no vamos a hacer un cortocircuito cuando cambiemos el giro.
Esquema de maniobra
Pág. 2
C1=70F ∗Kw
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1
K1
K1
H1 H2
K2
K2
S2
A1
A2
1
2
13
14
3
4
61
62
K1K2
61
62
DY1 23
24
13
14
DY1
2
1
H3

Inversor de giro temporizado
Práctica 11:Inversor de giro temporizado
En esta a práctica incluimos un nuevo elemento que es el temporizador. Cuando necesitamosque un proceso se mantenga automáticamente durante un tiempo determinado nos podemos valer deun temporizador para automatizar dicho proceso. El temporizador es, a grandes rasgos, un cuerpoque contiene una bobina y un cuerpo de contactos auxiliares y un mecanismo para temporizar. Apartir de que le llegue señal a la bobina El temporizador comenzará a actuar y cuando termine eltiempo programado cambiará el estado de sus contactos auxiliares.
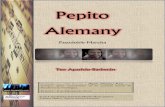
Existen muchos tipos de temporizadores, aunque nosotroshemos visto temporizadores “a la conexión” o “On Delay” y ala desconexión u “Off Delay”. Ambos son regulablesmediante una rueda que determina el tiempo que queremoscontar. Para aplicaciones más precisas disponemos en elmercado de temporizadores digitales, donde el tiemposeleccionado se ajustará exactamente a lo que queremos.
La diferencia entre un On delay y un Off delay estriba en elmomento en el cual activarán sus contactos auxiliares.
El On Delay, cambiará el estado de sus contactos auxiliares, transcurrido un tiempoprogramado desde que se le da señal. En el momento en que quitamos la señal, sus contactosvuelven a su estado de reposo, de manera que para que se mantenga el cambio deberemos manteneraplicada la señal.
El Off Delay sin embargo comienza el conteo en el instante en que le quitemos la señal trashabérsela suministrado previamente. En este momento de la desconexión comienza el conteo y trasel tiempo programado cambia el estado de sus contactos auxiliares.
Gráfica de un temporizador On Delay
Pág. 1
1.Comienza la temporización.2.Termina la temporización. Se activan los contactos.3.Se deja de alimentar el temporizador. Las salidas vuelven a su estado original.4.Comienza la temporización.5.Termina la temporización sin que de tiempo de que las salidas se activen.1 2 3 4 5
A1 de T
Contactos de T
1
0
1
0

Inversor de giro temporizado
Gráfica de un temporizador Off Delay
Ambos son válidos para muy distintas aplicaciones, y en el caso que nos ocupacomenzaremos a usarlo para temporizar el giro de un motor.
Físicamente, los temporizadores se utilizan de forma similar a los cuerpos de contactosauxiliares. Necesitan un contactor para ser activados. La manera de montar un temporizador esencajándolo sobre un contactor, así cuando el contactor este activado estaremos dándole señal altemporizador.
Enunciado:El enunciado de la práctica nos propone crear un inversor de giro temporizado. Esto es, con
dos contactores, uno para el giro a la izquierda y otro para el giro a la derecha, crear laautomatización de manera tal que cuando presionemos el pulsador S1 arranque el motor a derecha ytranscurrido un tiempo T comience a girar a izquierda.
Esquema potencia:
Vemos el esquema de potencia de uninversor de giro de un motor trifásico. Cuandoconectemos KI el motor comenzará a girar enun sentido y cuando conectemos KD, quetiene una fase cambiada respecto al otrocontactor, el motor girará en el sentidoinverso.
Por lo tanto la maniobra del circuitoestará orientada a producir este cambio en lasbobinas de los contactores KI y KD. Veamos yanalicemos el funcionamiento de la maniobra:
Pág. 2
1.Activamos la bobina A1 de T. Se activan los contactos.2.Comienza la temporización al dejar de aplicar señal sobre A1.3.Concluida la temporización se desactivan los contactos. 4.Volvemos a activar A1 de T. Se activan de nuevo los contactos.5.Dejamos de aplicar señal sobre A1, comienza la temporización.6.Concluida la temporización, se desactivan los contactos.
1 2 3 4 5
A1 de T
Contactos de T
1
0
1
0
6
Ilustración 1 Esquema de potencia
1 3 5
2 4 6
U1 V1 W1
FR1
M1
1 3 5
2 4 6
3x230v
L1
L2
L3 3x230v
2 4 6
1 3 5
KD
A1
A2
2 4 6
1 3 5
KL
A1
A2
A2
A1
KI

Inversor de giro temporizado
Esquema de maniobra:
Tenemos los elementos de protección correspondientes, en este caso el disyuntor paraproteger al motor nos desconectaría el circuito en caso de anomalía. Por otro lado el Paro deEmergencia nos desconecta también todo el circuito cuando lo pulsamos. Por lo demás, vemos uncontactor KL autoalimentado que lleva un temporizador. A partir de que pulsamos S1, T1 empieza acontar, KL se autoalimenta de manera que siempre tenemos tensión en A1 de KL. Los contactos 55-56 y 67-68 que vemos son los correspondientes al temporizador T1, en este caso se trata de uncontacto normal abierto y uno normal cerrado. Ambos cambiaran su estado cuando transcurra eltiempo programado en T1. De momento, como el T1 55-56 está cerrado la corriente circula hastaKI, pasando por el contacto 61-62 de KD que estará cerrado siempre que KD no esté activo. Elcircuito quedará establecido en esa posición, con el motor girando a izquierda, hasta que T1 llegue asu tiempo programado, y en ese momento los contactos de T1 normal cerrados se abren y los normalabiertos se cierran, de manera que la corriente dejará de circular por el 55-56 de T1 puesto queestará abierto. Instantes después -unas pocas milésimas de segundo- el contacto auxiliar n/c de KIque estaba abierto, puesto que KI estaba activado, se habrá vuelto a cerrar de nuevo. En estascondiciones, y con el contacto 67-68 de T1 cerrado la corriente comenzará a circular por KD ynuestro motor girará a derecha. Es importante observar que el contactor de T1 permanece activo entodo momento porque, como hemos visto en las gráficas, si deja de estar alimentado sus contactosvuelven a su posición de reposo.
Pág. 3
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1
KI
K1
H1 H2KD
A1
A2
1
2
61
62
KIKD
61
62
DY1 23
24
13
14
DY1
2
1
H3
KL A1
A2
T110s
T155
56
67
68
T1

Arranque triángulo estrella temporizado
Práctica 12:Arranque triángulo-estrella
temporizado
Para la realización de esta práctica, similar a la anterior, nos valemos del uso de lostemporizadores para arrancar un motor conectado primero en estrella para el momento del arranquey pasar unos segundos después a triángulo. En prácticas anteriores vimos la utilidad de esteprocedimiento de arranque para motores que nos ayuda a evitar sobrecargas en la red.
Enunciado:Crear un circuito que arranque, mediante la pulsación de S1, un motor en estrella, que
cambie a triangulo transcurrido un tiempo T1 y que se apague transcurrido un tiempo T2.
Esquema de potencia:
Vemos que se trata de un simple esquema de una conexión en triángulo/estrella que ademáslleva un contactor de linea y un guarda-motor. Nuevamente la clave está en la maniobra delesquema que pasamos a ver y analizar a continuación:
Pág. 1
A2
A1
K2
U1 V1 W1
M1
1 3 5
2 4 6
3x230v
L1
L2
L3 3x230v
2 4 6
1 3 5K1
A1
A2
2 4 6
1 3 5KL
A1
A2
W2 U2 V2
>I>I>I
1 3 5
2 4 6
DY1

Arranque triángulo estrella temporizado
Esquema de maniobra:
Vemos el disyuntor y el Paro de emergencia como elementos de protección del circuito demaniobra que desconectan todo cuando son activados. Por otro lado vemos un KL autoalimentadoque lleva un temporizador T1. Cuando pulsamos S1 la corriente pasa por los contactos de T2 55-56y alimenta la bobina KL. Ésta activa sus contactos auxiliares quedando autoalimentada por su 13-14y el temporizador T1 comienza a contar. Como en un primer instante T1 todavía está contando lacorriente puede ir a través de los contactos 55-56 de T1 y a través del enclavamiento entre K1 y K2a alimentar la bobina K1, con lo que el motor empezará a girar en estrella. Sólo cuando transcurra eltiempo programado en T1 el temporizador cambiará el estado de sus contacto auxiliares. Para elcaso vemos que se abrirá el contacto 55-56 que alimentaba K1 y se cerrará el contacto 67-68 de T1y por tanto se empezará a alimentar K2. K2 asimismo activará sus contactos auxiliares, cerrando elnormal abierto 83-84 que alimentará KD, que en realidad se trata de un contactor auxiliar. Adosadoal contactor KD encontramos T2 que empezará a contar en cuanto éste primero se active. De maneraque el circuito en este instante ha dejado de alimentar K1 y ha empezado a alimentar K2 y KD. Unavez transcurra el tiempo programado en T2 cambiarán de estado sus contactos auxiliares, yfijándonos en el contacto auxiliar del temporizador T2 55-56, justo encima de KL, vemos como alabrirse KL dejará de estar alimentada. Al instante de que caiga KL su contacto auxiliar 13-14también caerá de manera que todos los contactores del circuito caerán por falta de alimentación y eneste momento habremos reiniciado el circuito, siendo preciso pulsar S1 de nuevo para que vuelva ahacer otra vez el ciclo.
Pág. 2
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1 K1
H1 H2K2
A1
A2
1
2
61
62
K1K2
61
62
DY1 23
24
13
14
DY1
2
1
H3
KL A1
A2
T110s
T155
56
67
68
T1
A2
A1KD
K1
83
84K256
55T2
T210s

Inversor de giro temporizado
Práctica 13:Inversor de giro temporizado
En esta práctica profundizamos un poco más en el uso de los temporizadores creando unanueva automatización para la inversión de giro de un motor, temporizada de principio a fin y conpausa intermedia.
Enunciado:Crear la automatización de un motor, de manera tal que cuando pulsemos S1 el motor
comience a girar a izquierda, transcurrido el tiempo T1 el motor pare durante el tiempo T2 ycomience a girar a derecha durante un tiempo T3 tras el cual pare definitivamente hasta un nuevopulso de S1. Dotar la automatización de las correspondientes medidas de seguridad.
Esquema de maniobra:
De forma similar a lo que hemos visto en otras prácticas, vemos la protección del disyuntor,la del Paro de Emergencia y un primer contactor autoalimentado KL que se pondrá en marchacuando pulsemos S1 y se autoalimentará desde su 13-14. Asimismo cuando éste contactor estéactivado lo estará el resto del circuito, que pasamos a analizar a continuación.
Con tensión en el 14 de KL, ocurre que la corriente puede llegar a través del 55-56 de T1 yel enclavamiento entre KD/KI hasta KI, con lo cual el motor empieza a girar. Como el temporizadorT1 unido a KL ya está contando, cuando llegue a su fin, pondrá en marcha sus contactos. En estecaso abrirá el contacto 55-56 impidiendo el paso de más corriente hacia KI, con lo que el motor
Pág. 1
2
1
4
3
14
13
2
1
A2
A1
24v F
N
S0
S1 KL
H1 H2
Kaux1 A1
A2
1
2
61
62
KD
DY1 23
24
13
14
DY1
2
1
H3
KL A1
A2
T110s
T155
56
67
68
T1
A2
A1Kaux2
KI
83
84KD56
55T3
T310s
T210s
KI
62
61
T2
68
67
KD
A1
A2

Inversor de giro temporizado
dejará de girar a izquierda y cerrará el 67-68 de T1 con lo que quedará activado Kaux1. Kaux1 es uncontactor utilizado únicamente para contar el tiempo que el motor estará parado entre un giro y otro.Así pues, vemos que nada ocurre hasta que el contactor T2 no activa sus contactos, momento en elcual se activarán de manera simultanea KD y, mediante el contacto 83-84 de KD, Kaux2. KD nospone a girar el motor a derecha, mientrastanto T3 adosado a Kaux2 va contando su tiempo. CuandoT3 llega a su fin el único contacto de T3 cambia de estado. Y al cambiar de estado, esto es, alabrirse, hace que caiga KL con lo que también cae la autoalimentación de KL y por ende todo elcircuito, quedando todo en estado de reposo tal como estaba al principio hasta una nueva pulsaciónde S1.
Esquema de potencia:
Nuevamente la clave de la resolución del circuito estaba en la maniobra, para este caso lapotencia es sumamente simple, tratándose como vemos de un inversor de giro a través de uncontactor de línea (opcional) y un guardamotor o disyuntor.
Pág. 2
A2
A1
KI
1 3 5
2 4 6
U1 V1 W1
FR1
M1
1 3 5
2 4 6
3x230v
L1
L2
L3 3x230v
2 4 6
1 3 5
KD
A1
A2
2 4 6
1 3 5
KL
A1
A2

Semáforo mediante temporizadores
PRÁCTICA 14Temporizadores:
Semáforo
Qué mejor ejemplo que un semáforo para ver el uso de temporizadores. Como se trata de unelemento tan cotidiano en nuestras vidas, todos sabemos ya cual es el objetivo de la práctica.Efectivamente, implementaremos, mediante el uso de temporizadores, un semáforo que cambiará deverde a ámbar y de ámbar a rojo, para después volver al verde y formar así un bucle cerrado.
En esta práctica realizamos la maniobra que daría corriente a las tres bombillas delsemáforo. Aunque no conectaremos las bombillas de potencia, si que encenderemos los contactores,y a la vez encenderemos también tres pilotos que nos servirán para ver en que estado se encuentranuestro circuito en cada momento.
A fin de simplificar las cosas, hemos llamado a las tres bombillas H1, H2 y H3, y cadacontactor va asociado a un temporizador con su mismo número, K1 con T1, K2 con T2 y K3 conT3. KL sólo se ocupa de suministrar tensión al resto del circuito y no lleva temporizador asociado.
Vemos en el esquema que contamos con 4 contactores. El primero de ellos (KL) nos sirve
Pág. 1
Ilustración 1 Semáforo con 3 temporizadores a la conexión
2
1
4
3
14
13
A2
A1
24v F
N
S0
S1 KL
H2
A1
A2
1
2 2
1
H3
KL A1
A2 A2
A1K1T310s
T210s
T2
68
67
T110s
56
55T3
56
55T1 T1
68
67T2
55
56
2
1
H2
K2 K3

Semáforo mediante temporizadores
para mantener la alimentación del circuito. Una vez pulsado S1 el contacto auxiliar 13-14 de KLnos mantendrá la alimentación en el resto de circuito y solo caerá cuando pulsemos el paro S0.
Por lo demás vemos como en un primer instante la corriente actúa sobre K1, a través del 55-56 de T3, y simultáneamente nos encenderá H1, a través del 55-56 de T1. Transcurrido el tiempoT1, al cambiar el estado de sus contactores apagamos H1 y pasamos a alimentar K2, y, a través del55-56 de T2, alimentamos también H2. De manera similar a este último cambio, cuando transcurreel tiempo T2, al cambiar de estado sus contactos, se apaga H2 y alimentamos K3 y H3. Cuandotranscurre el tiempo T3 Hacemos que caiga K1 debido a que abrimos el contacto auxiliar que loalimenta. En ese instante se volverá a encender H1 y toda la parte del circuito que depende del 67-68 de T1 volverá a su estado de reposo. De esta manera, hemos creado un ciclo cerrado con trestiempos, que se irán sucediendo de forma encadenada hasta que el ciclo sea interrumpido por elaccionamiento de S0.
Veamos otro modo de obtener el mismo resultado:
Para realizar el circuito contamos con dos temporizadores a la conexión y uno a la
desconexión. Recordemos que el temporizador a la desconexión cambia el estado de sus contactosauxiliares en el instante en que recibe la corriente, y los mantiene cambiados durante el tiempo Tprogramado después de desconectarlo. En otras palabras sería decir que comienza a temporizar encuanto se desconecta.
Analizando este segundo circuito vemos que cuenta, de forma similar al primero, con unaalimentación que podríamos llamar de linea, que suministra energía al circuito mientras está enmarcha. En un primer instante, alimentamos K1 a través del 55-56 de T3, así como H1 y K2, através del 55-56 de T1. En el preciso instante en que alimentamos K2, sus contactos auxiliarescambian de estado, así que tendremos el 57-58 de T2 cerrado.
Pág. 2
Ilustración 2 Semáforo con 2 temporizadores a la conexión y 1 a la desconexión
2
1
4
3
14
13
A2
A1
24v F
N
S0
S1 K1
H1
A1
A2
1
2 2
1
H3
K1 A1
A2 A2
A1K2T310s
T22s
T2
58
57
T110s
56
55T3
56
55T1
T1
68
67
T2 65
66
2
1
H2
K3 K4

Semáforo mediante temporizadores
Cuando transcurre el tiempo T1, el contacto 55-56 de T1 se abre, con lo que H1 se apaga,K2 deja de tener alimentación, por lo tanto comienza su temporización y H2 se enciende, a travésdel contacto auxiliar 67-68 de T1 y el 57-58 de T2. Cuando pasa el tiempo programado en T2, suscontactos auxiliares volverán a su estado de reposo, así que H2 se apagará y K3 y H3 se alimentarána través del contacto 65-66 de T2. Transcurrido el tiempo T3, haremos que caiga T1 mediante laobertura del contacto auxiliar 55-56 de T3, que volverá a encender H1 y a alimentar K2 y de estamanera el circuito quedará reiniciado.
Es posible obtener un circuito con idénticos resultados utilizando 2 temporizadores a ladesconexión y uno a la conexión. Aquí vemos un ejemplo de montaje.
En un primer instante, cuando activemos el circuito mediante S1, alimentamos K2. Cuandose cierra 57-58 de T2 tenemos corriente en K3, que también cierra sus contactos, 57-58 de T3 dandoseñal a T1. Este empieza a temporizar, cuando acaba, cambia su contacto 55-56 T1 a abierto, asíque desconecta T2 que, desconectado, empieza a temporizar. Por otro lado H2 se mantieneencendida gracias al 67-68 de T1. Cuando T2 finaliza su temporización H3 se enciende y K3 sedesconecta, comienza la temporización de T3. Cuando T3 finaliza, T1 se apaga y el circuito vuelveal inicio de la secuencia.
Para el desarrollo del circuito anterior, con el fin de simplificar el proceso de diseño, seprocedió primero con los temporizadores y más adelante se añadieron los pilotos luminosos.
Pág. 3
Ilustración 3 Semáforo con 2 temporizadores a la desconexión y 1 a la conexión
2
1
4
3
14
13
A2
A1
24v F
N
S0
S1 KL
H1
A1
A2
1
2
KL A1
A2 A2
A1K1T310s
T22s
T110s
56
55T1 T1
68
67
2
1
H2
K2 K3
57
58
T3
57
58
T2
T265
66
2
1
H3

Semáforo mediante temporizadores
Y todavía existe otra posibilidad más para construir la misma práctica, que sería conectartres temporizadores a la desconexión. Aunque el esquema a simple vista es sencillo, el análisis no loes tanto, y para comprender el funcionamiento más abajo está especificada la secuencia que sigue elcircuito.
Secuencia del circuito:
T1 - ON57-58-T1 – C*T2 – ONH1 - ON65-66-T2 – A**57-58-T2 – CT3 – ON65-66-T3 – AT1 – OFFT1 Temporización (...)
57-58-T1 – AT2 – OFFH1 – OFF65-66-T1 – CH2 - ONT2 Temporización (...)
57-58-T2 – AH2 - OFF65-66-T2 – CH3 - ONT3 – OFFT3 Temporización (...)
65-66-T3 – C57-58-T3 – AH3 - OFF
La secuencia es cíclica y se repetirá indefinidamente hasta que pulsemos paro. Se haseparado la secuencia en tres columnas para facilitar la comprensión del circuito.
*C, quiere decir contacto Cerrado**A, quiere decir contacto Abierto
Pág. 4
Ilustración 4 Semáforo con tres temporizadores a la desconexión
2
1
4
3
14
13
A2
A1
24v F
N
S0
S1 KL
H1
A1
A2
1
2
KL A1
A2 A2
A1K1T310s
T22s
T110s
2
1
H2
K2 K3
2
1
H3
66
65T3
66
65T2
66
65T1
T1 57
58
T2 57
58
T3 57
58