PRE Laboratorio - Practica 1 - SEP-DIC13 - Carlos Mastalli

of 4
-
Upload
chivovaquitaaguilera -
Category
Documents
-
view
221 -
download
0
Transcript of PRE Laboratorio - Practica 1 - SEP-DIC13 - Carlos Mastalli
-
7/21/2019 PRE Laboratorio - Practica 1 - SEP-DIC13 - Carlos Mastalli
1/4
UNIVERSIDAD SIMON BOLIVARDEPARTAMENTO DE PROCESOS YSISTEMASLABORATORIO DE CONTROLSEP-DIC 13
Profesor: Carlos Mastalli Ite!rates:
"os# $eli%e Ver&elst
'r(%o: 3 "os# A%ote
$e)&a: 14/11/2013 De*i+ar Al,oro
Pr.)ti)a 1 / PRE La,oratorioMo0elae2 I0eti)a)i4 * Si+(la)i4 0e Siste+as 0e Pri+er *
Se!(0o Or0e
Objetivos:
1. Identificar el modelo de un sistema a partir de la respuesta temporal y validar el modelo terico.
2. Estudiar los parmetros caractersticos de la respuesta de sistemas de primer orden, primer ordencon retardo y segundo orden.
3. Analizar el efecto de la no linealidad sobre el comportamiento de un sistema.
4. Analizar el efecto de la variacin de los parmetros fsicos sobre las caractersticas de respuestade un sistema.
Gua de estudio:
1. Repasar los conceptos y aplicaciones de: funcin de transferencia, linealizacin, variables de
perturbacin y diagramas de bloues.
2. Estudiar cules son los parmetros de respuesta caractersticos de los de sistemas de primer
orden, primer orden con retardo y segundo orden.
3. Repasar las t!cnicas de identificacin del modelo de un sistema a partir de la respuesta temporal.
-
7/21/2019 PRE Laboratorio - Practica 1 - SEP-DIC13 - Carlos Mastalli
2/4
Actividad 1 Hallar la funcin de transferencia a !artir del "odelo terico
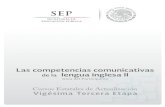
#i$ura 1."istema de control de nivel
%escri!cin:
El sistema consta de dos tanues de seccin uniforme y una bomba. El caudal de entrada al sistema
#$in%, se regula variando el volta&e de entrada a la bomba #'%. Ambos tanues poseen un orificio en elfondo, por lo ue el luido circula del tanue superior al inferior con un caudal $out (, y de !ste al
reservorio con $out).
El ob&etivo de control del proceso es mantener el nivel del segundo tanue * ) #t% lo ms cercano posible
al valor de referencia *). +ualuier perturbacin ue afecte al sistema se refle&a en el nivel de ambostanues #*( y *)%, por esto, interesa monitorear ambas variables. Es importante observar ue el sistema
presenta un comportamiento no lineal, pues las relaciones constitutivas ue relacionan los caudales de
salida y el nivel son no lineales.
El modelo en ecuaciones diferenciales del sistema de tanues en cascada viene dado por:
( )( ) ( )( (t
dH tA Qin t Qout t
dt= #(% ( )( ()dQout t A g H = #%
( )( ) ( )) ( )t
dH tA Qout t Qout t
dt
= #)% ( )) ))dQout t A g H = #-%
( ) ( )Qin t V t = #%
/onde 01.23, At1 (-.-)cm), Ad1 4.(56cm
) y g es la constante de gravedad. 7as unidades son 8cm9,
8seg9.
a% Identifiue las variables de entrada y salidas, parmetros fsicos y valores iniciales de este sistema.
&abla 1: 'ariables y armetros del "istema
'ariables de (ntrada '#t%
'ariables de )alida *(#t% y *)#t%
*ar+"etros #sicos 0, At, Ad y g
'alores ,niciales t14 y '#t%13.(-
b% Implemente en "I; de ;A?7A@ el sistema no lineal epresado en ecuaciones
diferenciales.
-
7/21/2019 PRE Laboratorio - Practica 1 - SEP-DIC13 - Carlos Mastalli
3/4
Actividad 2 ,dentificar la funcin de transferencia a !artir de la res!uesta de un
siste"a
a% Abra el arcCivo motores"I;.mdl en "I;, y modifiue Bnicamente los valores de la
referencia segBn la tabla anea, y declare en el Workspacede ;A?7A@ la variable +, segBn su
nBmero de euipo #+ 1 nBmero de euipo%. E&.: DD + 1
&abla 3: Entrada escaln segBn el nBmero de euipo
-eferencia ,nicial ' #inal ' )te! &i"e se$
Gru!o 1 4 3.-- 4
Gru!o 2 4 -.24 4
Gru!o 3 4 5.44 4
Gru!o 4 4 3.6- 4
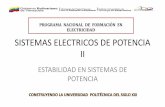
Fbtenga la respuesta temporal del motor y grafuela desde el Workspace de ;A?7A@, ycoluela en el cuadro aneo.
#i$. Respuesta temporal del simulador de motores
b% Fbtenga la funcin de transferencia del sistema. Indiue los parmetros utilizados.
Obtencin de la $anancia
"e tiene ue C( )=WfinalK 1(4 #a% , donde +# se obtiene del momento en el ue larespuesta se estabiliza por completo, Wfinal es el valor final del escaln ue se le dio al sistema
como entrada y > es la ganancia. 7uego, despe&ando de #a%: K=140
7=20
Obtencin del factor de a"orti$ua"iento
ara obtener el factor de amortiguamiento se obtiene primero el mimo pico #;p% de
Mp=C(rm )C( )
C() =0,2043 , donde +#rm% es el punto en el ue se obtiene el mimo pico.
Ginalmente el factor de amortiguamiento se obtiene de despe&ar H de Mp=e(
12)
. H
14,)64.
Obtencin de la frecuencia natural no a"orti$uada n
ara obtener la frecuencia natural no amortiguada #n% se obtiene el momento en el tiempo en el
ue se da el mimo pico #tmp% y se despe&a de d, as dser
-
7/21/2019 PRE Laboratorio - Practica 1 - SEP-DIC13 - Carlos Mastalli
4/4