PRENSA COMPACTADORA DE LATAS DE REFRESCO … · Introducción: Este proyecto es vasado en hacer...
34
C.B.T.I.S. 128 Prototipo: “prensa compactadora de latas para recicladora” Prototipo desarrollado para concurso Nacional En su fase estatal Asesor: Salvador Morales Cantú Integrantes del equipo: María de la paz Cruz Mateo Itzel Moreno Luna Eduardo Nájera Viridiana Parra Cardona FEBRERO 2012
Transcript of PRENSA COMPACTADORA DE LATAS DE REFRESCO … · Introducción: Este proyecto es vasado en hacer...
C.B.T.I.S. 128
Prototipo: “prensa compactadora de latas para
recicladora”
Prototipo desarrollado para concurso Nacional En su fase estatal
Asesor: Salvador Morales Cantú
Integrantes del equipo:
María de la paz Cruz Mateo Itzel Moreno Luna Eduardo Nájera
Viridiana Parra Cardona
FEBRERO 2012

INDICE
INDICE
1. Presentación:
2. Resumen……………………………………………………………………………………………………..………1 3. Introducción………………………………………………………………………………………………………..2 4. Objetivos………………………………………………………………….……………………………… ………..3 5. Justificaciones………………………………………………………………………………………………….….4 6. Hipótesis……………………………………………………………………………………………………………….5 7. Marco teórico 8. Antecedentes…………………………………………………………………………………………………….…6 9. Hojas de datos (investigación):
Pistón…………………………………………………………………………………………………………………….7 10. Sensor………………………………………………………………………………………………………………….8 11. Motor…………………………………………………………………………………………………………….…….13 12. Válvulas……………………………………………………………………………………………………………...15 13. PLC………………………………………………………………………………………………………………….….17 14. Diagramas: 15. Diagrama
eléctrico………………………………………………………………………………………………………….….23 16. Diagrama
neumático………………………………………………………………………………………………………….24 17. Dibujos en Solid
Works………………………………………………………………………………………………………..……….25 18. Diagrama de escalera de
PLC……………………………………………………………………………………………………………..……..31 19. Contabilidad: 20. Cotización…………………………………………………………………………..………………………………32 21. Galería de fotos…………………………………………………………………………………….……………33 22. Conclusión…………………………………………………………………………………………….……………42

Introducción:
Este proyecto es vasado en hacer más fácil el proceso de aplastar latas para su fácil transporte, ya que con este proceso no se requiere de esfuerzo humano, a lo largo de la historia se han desarrollado procesos de transportación por medio de banda y eso fue un claro ejemplo para la realización de nuestro proyecto.
Nosotros llegamos a pensar en una manera de contribuir con el reciclado de latas de aluminio.
Resumen Este proyecto muestra el desarrollo de un largo trabajo en la cual demostramos el conocimiento adquirido durante el ciclo de clases llevado a la práctica. Con que se desarrollo por medio de investigación e interpretación de ella. Nuestro proyecto es un claro ejemplo de automatización en las industrias como producción en serie, es un cambio tecnológico que ha tenido un largo desarrollo durante toda la historia. En la economía, es importante buscar una manera en la cual se pudiera desarrollar el proyecto de una forma funcional y de calidad para ahorrar el trabajo y el tiempo utilizado indebidamente en el desarrollo de diferentes actividades como el reciclaje. Y contiene materiales como el pistón que es un cilindro abierto por su base inferior, cerrado en la superior y sujeto a la biela en su parte intermedia. El movimiento del pistón es hacia arriba y abajo en el interior del cilindro, comprime la mezcla, transmite la presión de combustión al cigüeñal a través de la biela, fuerza la salida de los gases resultantes de la combustión en la carrera de escape y produce un vacío en el cilindro que “aspira” la mezcla en la carrera de aspiración. El sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, pH, etc.

Objetivo: Este proyecto fue realizado con el fin de poner en practica todo lo que hemos aprendido en nuestra carrera técnica ya que ahí demostramos los conocimientos adquiridos en la materia de programación de PLC y automatización, además de perfeccionar los conocimientos que estaban huecos debido a diversos factores e incrementarlos debido a las investigaciones que realizamos para llenar esos huecos que se presentaron durante el desarrollo del proyecto. Pues con todo ese conocimiento logramos realizar un proyecto aceptable y de buena calidad, para así obtener experiencia en el ramo de la electrónica para futuros proyectos en nuestra especialidad que se pueden presentar en nuestras vidas.
Justificaciones:
Hablando académicamente de este proyecto se realizo para un fin común entre los integrantes de nuestro equipo ya que afianzamos conocimientos teóricos y prácticos que no se encontraban sólidamente.
En la economía, era importante buscar una manera en la cual se pudiera desarrollar el proyecto de una forma funcional y de calidad para ahorrar el trabajo y el tiempo utilizado indebidamente en el desarrollo de diferentes actividades como el reciclaje.
De tal forma contribuimos ala comunidad al desarrollarnos de manera capas y competitiva en el ámbito industrial.
Hipótesis
Nuestro proyecto que contiene elementos neumáticos, eléctricos, programación y diseño.
La principal función del proyecto será la reducción de latas al aplastarlas, de ahí se llevara a una banda transportadora en la cual llevara a las latas a su destino final, y este consta que llegue a un tubo en el cual se acumulara.

Antecedentes Nuestro proyecto es un claro ejemplo de automatización en las industrias como producción en serie, es un cambio tecnológico que ha tenido un largo desarrollo durante toda la historia. En sus inicios lo encontramos durante la segunda mitad del siglo XVIII y a principios del XIX, en la Revolución Industrial, en esta época la economía basaba en el trabajo manual fue reemplazado por la industria y la manufactura. La Revolución comenzó con la mecanización de las industrias textiles y el desarrollo de los procesos del hierro. Las innovaciones tecnológicas mas importantes fueron la maquina de vapor y la denominada Spinning Jenny (fue una máquina hiladora multi-bobina, inventada en 1765 por James Hargreaves). Este dispositivo redujo enormemente el trabajo requerido para la producción de hilo, dando a un solo trabajador la capacidad de manejar ocho o más carretes a la vez. La producción y desarrollo de nuevos modelos de maquinaria en las dos primeras décadas del siglo XIX facilito la manufactura en otras industrias e incremento la producción y se disminuye el tiempo en que estos se realizan. Con esto dio paso a la Producción en serie, esta es una simplificación de tareas complejas en varias operaciones simples que pueda realizar un obrero, y así bajar costos en producción y elevar la cantidad de producción bajo el mismo costo fijo. Este es el principio del Taylorismo llamado así por el estadounidense Frederick Winslow Taylor, pero debido a la presión que este principio daba a los obreros se presentaron huelgas y reclamos por parte de ellos. Pero debido a esto se logro superar por el Fordismo que era un modo de producción en cadena que realizo Henry Ford (fabricante de automóviles) con una combinación y organización general del trabajo especializada y reglamentada a través de cadenas de montaje, maquinaria especializada, salarios mas elevados y mas trabajadores de planta. Sin embargo su reemplazada por el Toyotismo se destaca de su antecesor básicamente en la idea de aumento de productividad a través de la gestión y organización (just in time), trabajo flexible y el trabajo combinado que supera la mecanización e individualismo del operador.
MARCO TEORICO Pistón El pistón es un cilindro abierto por su base inferior, cerrado en la superior y sujeto a la biela en su parte intermedia. El movimiento del pistón es hacia arriba y abajo en el interior del cilindro, comprime la mezcla, transmite la presión de combustión al cigüeñal a través de la biela, fuerza la salida de los gases resultantes de la combustión en la carrera de escape y produce un vacío en el cilindro que “aspira” la mezcla en la carrera de aspiración. El pistón, que a primera vista puede parecer de las piezas más simples, ha sido y es una de las que ha obligado a un mayor estudio. Debe ser ligero, de forma que sean mínimas las cargas de inercia, pero a su vez debe ser lo suficientemente rígido y resistente para soportar el calor y la presión desarrollados en el interior de l la cámara de combustión. Los pistones de los motores actuales usan como elemento principal el aluminio, por ser un metal con amplias cualidades. En la fabricación de los pistones, al aluminio se le agregan otros elementos para obtener formulas adecuadas que proporcionan las características particulares necesarias según el tipo y aplicación del motor. Estas aleaciones son las que permiten obtener un producto de alta calidad.

Sensor

Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, pH, etc. Una magnitud eléctrica puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en un sensor de humedad), una Tensión eléctrica (como en un termopar), una corriente eléctrica (como en un fototransistor). Un sensor se diferencia de un transductor en que el sensor está siempre en contacto con la variable de instrumentación con lo que puede decirse también que es un dispositivo que aprovecha una de sus propiedades con el fin de adaptar la señal que mide para que la pueda interpretar otro dispositivo. Como por ejemplo el termómetro de mercurio que aprovecha la propiedad que posee el mercurio de dilatarse o contraerse por la acción de la temperatura. Un sensor también puede decirse que es un dispositivo que convierte una forma de energía en otra. Áreas de aplicación de los sensores: Industria automotriz, Industria aeroespacial, Medicina, Industria de manufactura, Robótica, etc. Los sensores pueden estar conectados a un computador para obtener ventajas como son el acceso a una base de datos, la toma de valores desde el sensor.
Sensores de contacto:
Estos dispositivos, son los más simples, ya que son interruptores que se activan o desactivan si se encuentran en contacto con un objeto, por lo que de esta manera se reconoce la presencia de un objeto en un determinado lugar.
Sensores de proximidad XE "SENSORES DE PROXIMIDAD"
Son dispositivos que detectan señales para actuar en un determinado proceso u operación, teniendo las siguientes características: • Son dispositivos que actúan por inducción al acercarles un objeto. • No requieren contacto directo con el material a sensar. • Son los más comunes y utilizados en la industria • Se encuentran encapsulados en plástico para proveer una mayor facilidad de montaje y protección ante posibles golpees
APLICACIONES: • Control de cintas transportadoras, • Control de alta velocidad
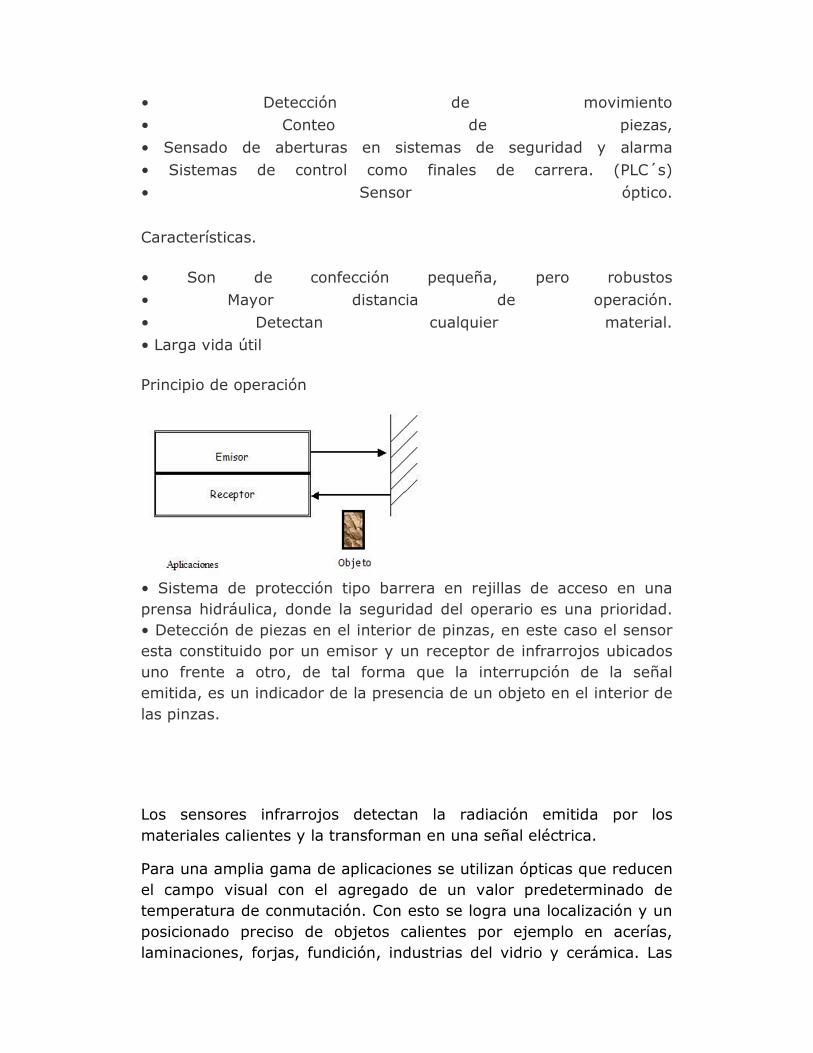
• Detección de movimiento • Conteo de piezas, • Sensado de aberturas en sistemas de seguridad y alarma • Sistemas de control como finales de carrera. (PLC´s) • Sensor óptico. Características.
• Son de confección pequeña, pero robustos • Mayor distancia de operación. • Detectan cualquier material. • Larga vida útil
Principio de operación
• Sistema de protección tipo barrera en rejillas de acceso en una prensa hidráulica, donde la seguridad del operario es una prioridad. • Detección de piezas en el interior de pinzas, en este caso el sensor esta constituido por un emisor y un receptor de infrarrojos ubicados uno frente a otro, de tal forma que la interrupción de la señal emitida, es un indicador de la presencia de un objeto en el interior de las pinzas.
Los sensores infrarrojos detectan la radiación emitida por los materiales calientes y la transforman en una señal eléctrica.
Para una amplia gama de aplicaciones se utilizan ópticas que reducen el campo visual con el agregado de un valor predeterminado de temperatura de conmutación. Con esto se logra una localización y un posicionado preciso de objetos calientes por ejemplo en acerías, laminaciones, forjas, fundición, industrias del vidrio y cerámica. Las

partes calientes pueden ser localizadas a varios metros de distancia, el control de llama permite remover dichos objeto detectado.
La línea de productos incluye versiones compactas con procesamiento electrónico integrado, como así también los modelos para ambientes de hasta + 290 °C, con cable de fibra óptica entre esta y la electrónica. Todos los componentes son encapsulados en robustas carcasas de acero inoxidable que brindan de protección contra humedad, vapor, choques, y vibraciones. Los filtros ópticos sirven de protección contra radiaciones espurias.
Las versiones eléctricas están disponibles en 3 hilos para 10-55 VCC y 2 hilos para 20-260 VCA / CC. Ambas versiones incluyen protección contra cortos circuitos, sobrecargas y polaridad incorrecta. La protección contra cortos circuitos pulsante con alta inmunidad a interferencias provee un reajuste automático, el cual es eliminado luego de la falla. La incorporación de un LED nos indica el estado de funcionamiento. La conexión es por medio de 2 metros de cable POKTTherm o conectores robustos con protección IP68.
Angulo de visión, relación de distancia
El diámetro de la superficie explorada (d)
Incrementa a medida que aumenta la distancia (s). Esta relación de distancia depende del ángulo de (α).
Cubrimiento parcial
En algunos casos el área de detección del
PIROS no llega a cubrir el objeto. En estos casos la respuesta de temperatura del sensor debe ser más baja. Por ejemplo, si el objeto cubre el 40% (10%) usar una versión de 50 K (160k) más sensitivo.
Acabado de la superficie, emisividad
La mayoría de las aplicaciones mencionadas en este catalogo, se refieren a superficies ásperas, oscuras u oxidadas. En este caso la emisividad es muy cercana a 1 y puede ser ignorada. Por otra parte una superficie brillante con emisividad < 0.1 hace que la medición sea más difícil.
Cambios en las condiciones de operación:

La flexibilidad de los cambios en las líneas de producción requiere una muy alta adaptación de los sensores. Una aplicación ideal es la del PIROS con respuesta de temperatura ajustable. El sensor puede reaccionar a cambios en la forma y temperatura del objeto.
Opciones y Accesorios
Función chequeo:
Un auto chequeo manual o automático es efectuado por control remoto.
Cubierta refrigerada:
Doble pared de acero inoxidable y agua de enfriamiento cubren la óptica.
Conexión de aire:
Por medio de aire comprimido la óptica se mantiene limpia de polvo, vapor de agua y radiación de calor.
Tubo:
Protegen contra otros factores limitando la superficie de detección. Soporte giratorio:
Accesorio de montaje simple y ajustable.
Dispositivo electrónico:
En caso de radiación de fondo una cadena de led hace posible una medición exacta.
Salida analógica:
Para detección de objetos de entre 400 – 950
° C de temperatura existen salidas de 0 – 10 V o 0 – 20 mA.
OKD / OSD:
PIROS pintados en aluminio con carcasa rectangular con abrazadera para aplicaciones fuera del área de laminación en caliente.
LSA / LRA:
Barreras ópticas con carcasa de acero inoxidable para acería y laminación. Ej. para detección del material en un horno de recocido.

Teach-in:
Un algoritmo procesado y optimizado permite condiciones variables. distancia al objeto (s) diámetro de la superficie explorada
PLC
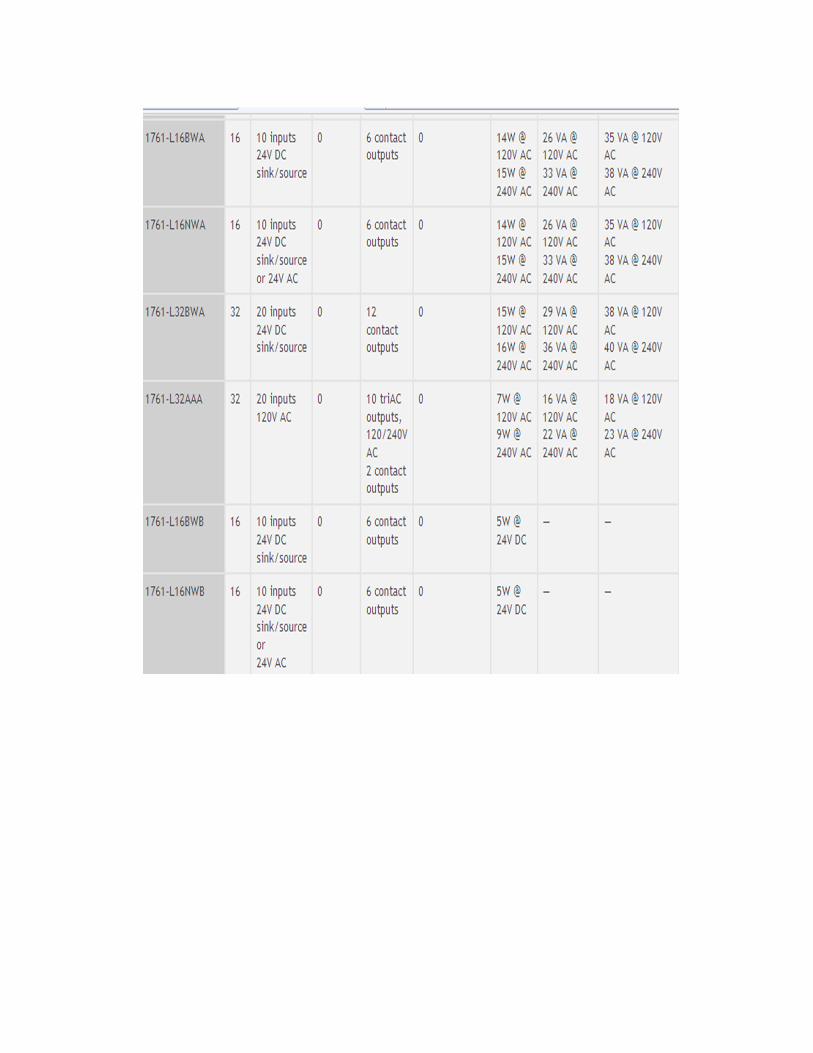
MicroLogix Programmable Controllers Overview
The MicroLogix family of controllers provides five levels of control. Small on size, big on performance, the MicroLogix 1000 controller offers control capabilities in an affordable, compact package. The MicroLogix 1200 controller is small enough to fit in tight spaces, but powerful enough to accommodate a broad range of applications. Designed to grow as your needs grow, the MicroLogix 1500 controller helps you achieve high-level control in a variety of applications. The MicroLogix family’s newest members, the MicroLogix 1100 and 1400 controllers, further enhance the MicroLogix family by expanding the application coverage area while offering great new features at an affordable price.
Based on the architecture of the market-leading SLC 500 controller family, the MicroLogix 1000 controller brings high-speed, powerful instructions and flexible communication to applications that demand compact, cost-effective solutions.

The MicroLogix 1000 controller is available in 10-point, 16-point, or 32-point digital I/O versions. Analog versions are also available with 20 digital I/O points, with 4 analog inputs (2 voltages and 2 current) and 1 analog output (configurable for either voltage or current). The analog I/O circuitry for the MicroLogix 1000 controller is embedded into the base controller, not accomplished through add-on modules: so, it provides very high-speed, cost-effective analog performance. The MicroLogix 1000 controller uses Rockwell Software RSLogix 500 and RSMicro programming software and shares a common instruction set with the MicroLogix and SLC 500 families of controllers.
Advantages for the MicroLogix 1000 Controllers • Preconfigured 1 KB program and data memory to ease configuration (for example, preconfigured bit, integer, timers, and counters). • Fast processing allows for typical throughput time of 1.5 ms for a 500-instruction program. • Built-in EEPROM memory retains all of your ladder logic and data if the controller loses power, eliminating the need for battery back-up or separate memory module. • Multiple input commons lets you use the controller for either sinking or sourcing input devices and multiple output commons provide isolation in multi-voltage output applications. • RS-232 communication channel allows for simple connectivity to a personal computer for program upload, download, and monitoring by using multiple protocols, including DF1 full-duplex. • RTU slave protocol supports using DF1 half-duplex allows up to 254 slave nodes to communicate with a single master by using radio modems, leased-line modems, or satellite uplinks. • Peer-to-peer messaging capability that lets you network up to 32 controllers on a DH-485 network by (using a 1761-NET-AIC module). • Advanced communication networks, including Device Net and Ethernet/IP, through the 1761-NET-DNI and 1761-NET-ENI communication modules.

• Controllers that have 24V DC inputs include a built-in, high-speed counter (6.6 kHz). • Adjustable DC input filters let you customize the input response time and noise rejection to meet your application needs. • Regulatory agency certifications for world-wide market (CE, C-Tick, UL, and c-UL, including Class I Division 2 Hazardous Location).


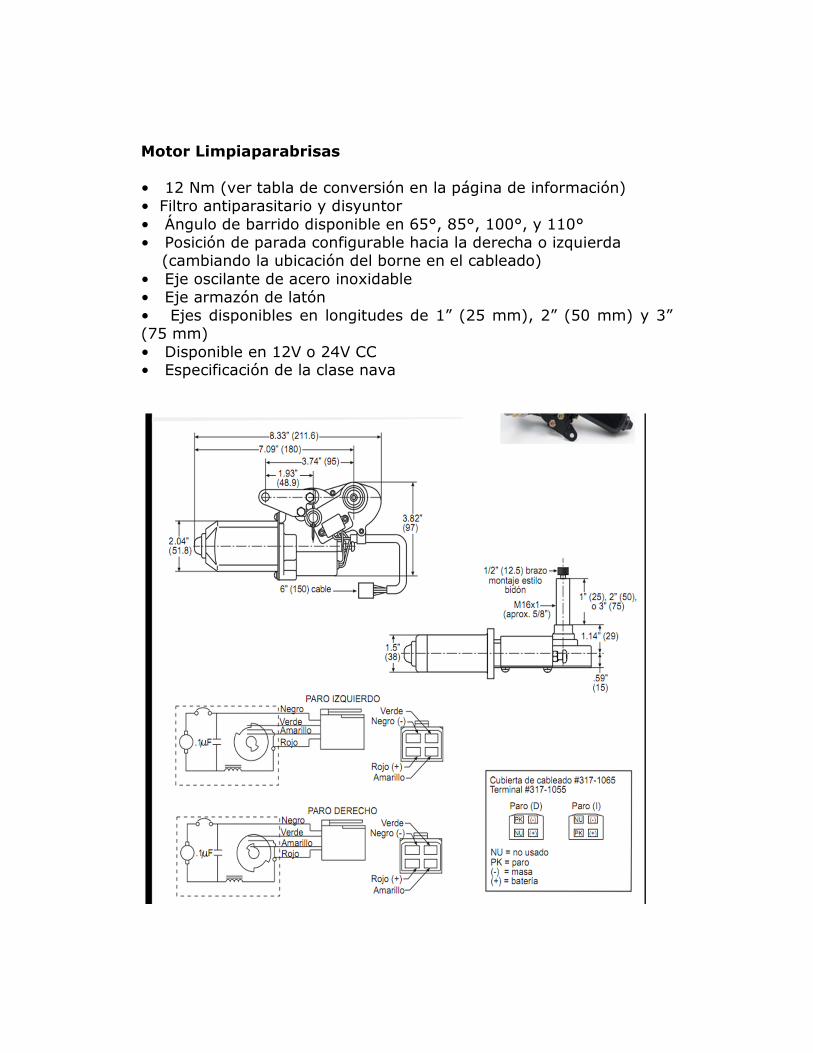
Motor Limpiaparabrisas • 12 Nm (ver tabla de conversión en la página de información) • Filtro antiparasitario y disyuntor • Ángulo de barrido disponible en 65°, 85°, 100°, y 110° • Posición de parada configurable hacia la derecha o izquierda (cambiando la ubicación del borne en el cableado) • Eje oscilante de acero inoxidable • Eje armazón de latón • Ejes disponibles en longitudes de 1” (25 mm), 2” (50 mm) y 3” (75 mm) • Disponible en 12V o 24V CC • Especificación de la clase nava
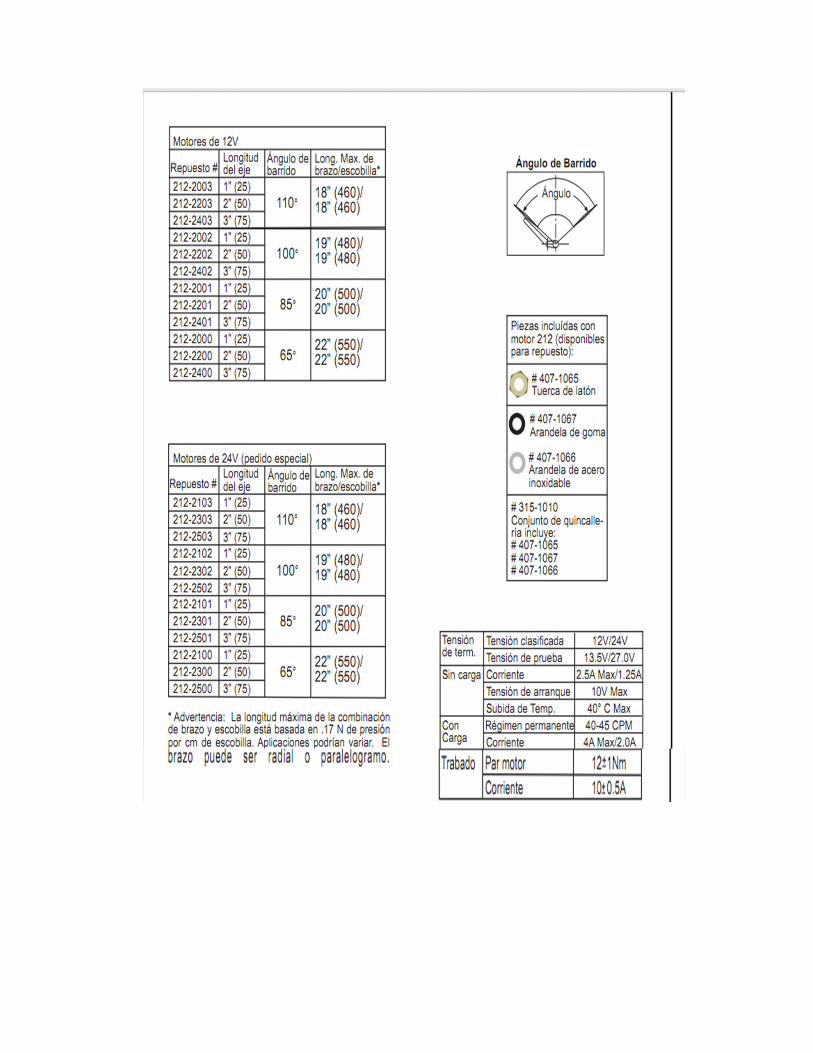
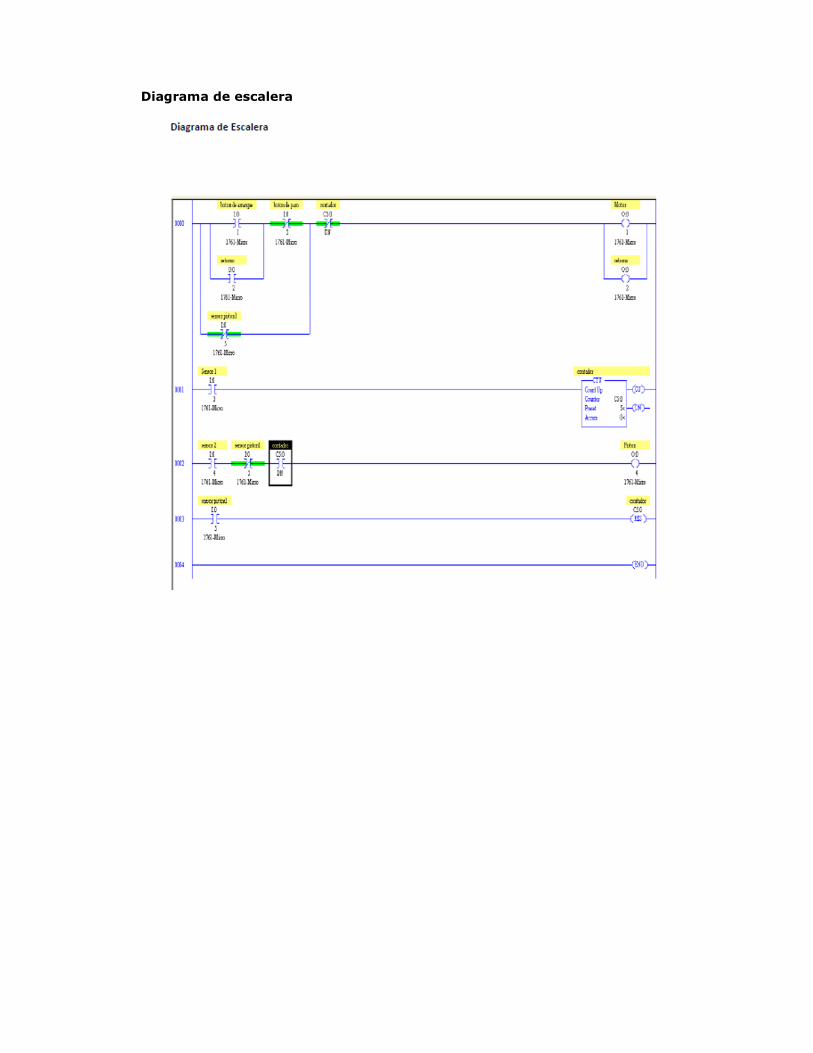
Diagrama de escalera
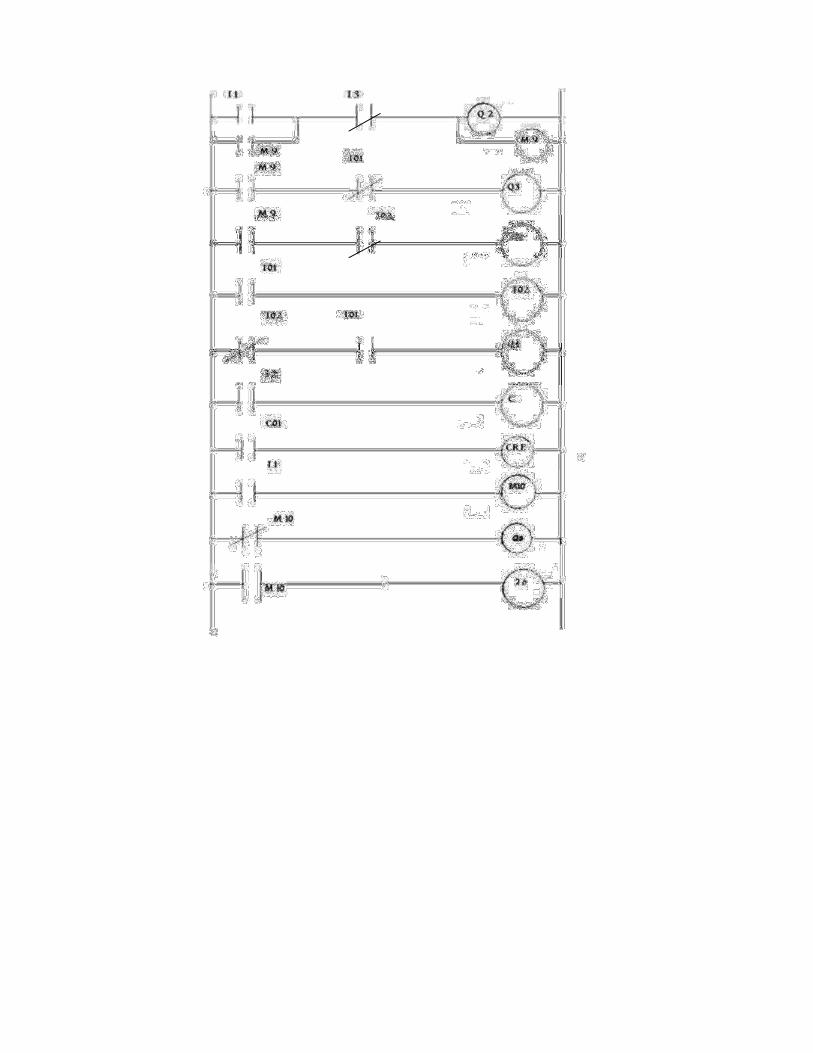
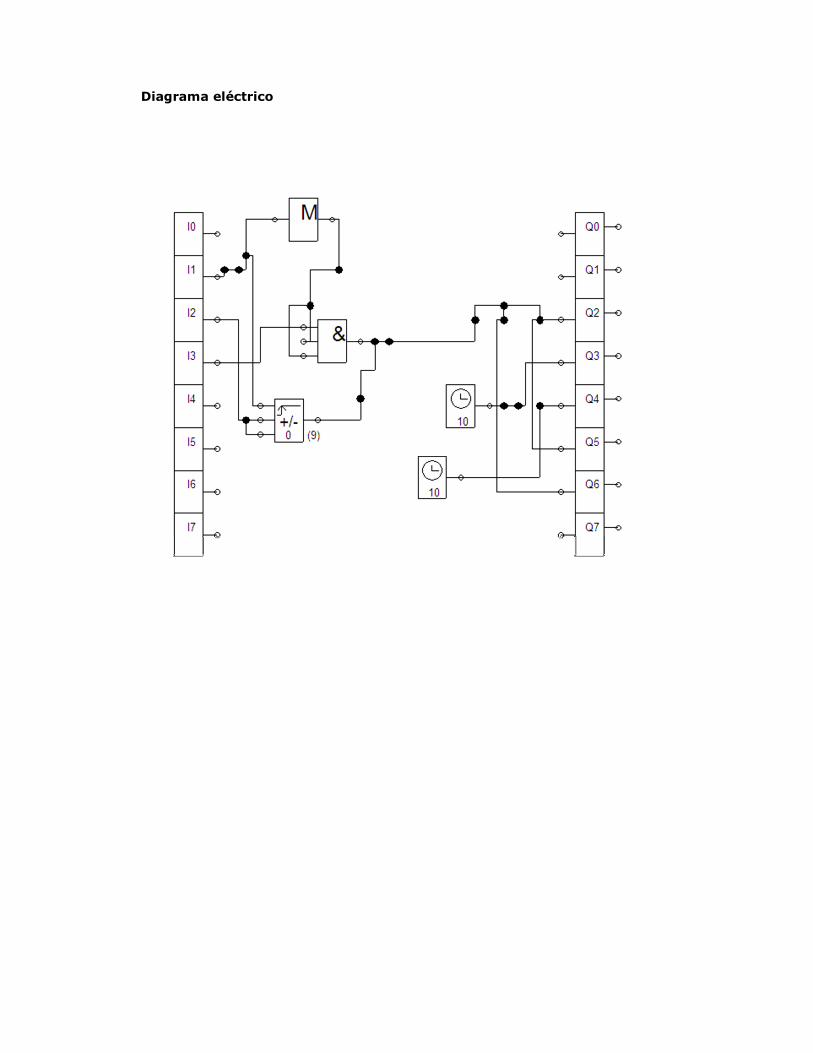
Diagrama eléctrico

Diagrama neumático
0V
Q0
Q1
24V
I0I1
Q3
Q2
Q4
Q5
Q6
Q7
I3I2
I4I5
I6I7
+24V
0V
LIMIT_SWITCH
SOLENOIDE_2
SOLENOIDE_1
MOTOR
BOTON_DE_PARO1
2 3 4
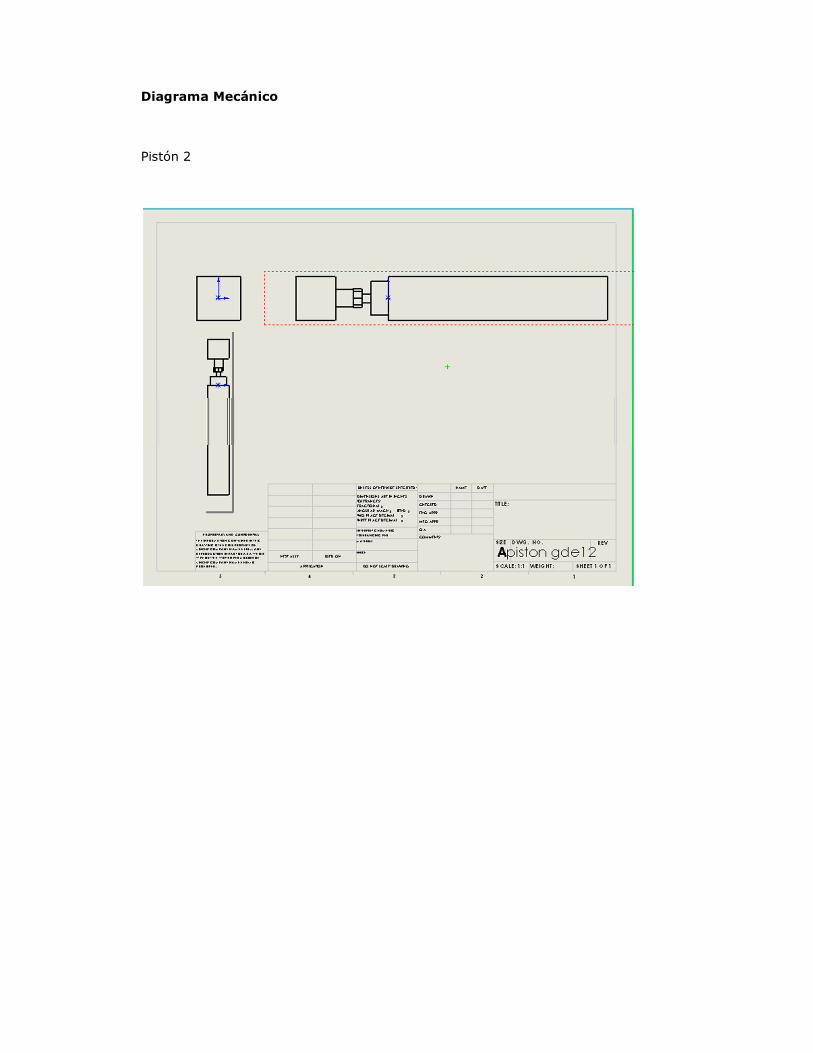
Diagrama Mecánico
Pistón 2

Pistón 1
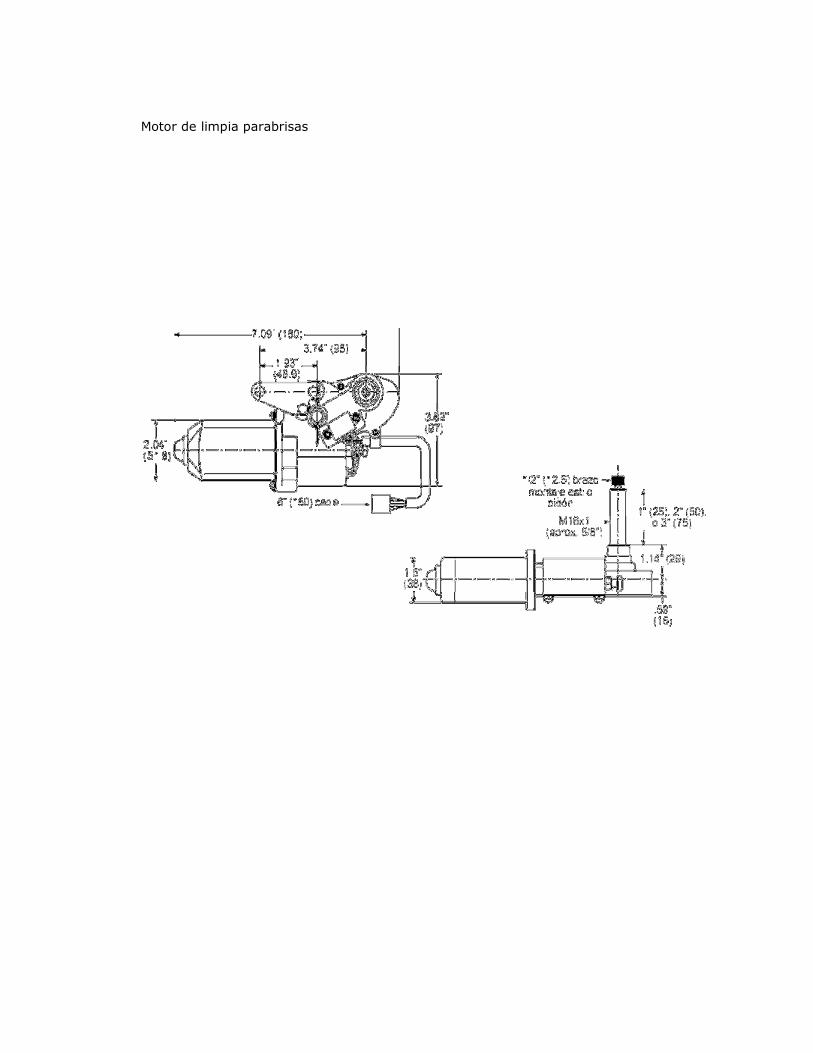
Motor de limpia parabrisas
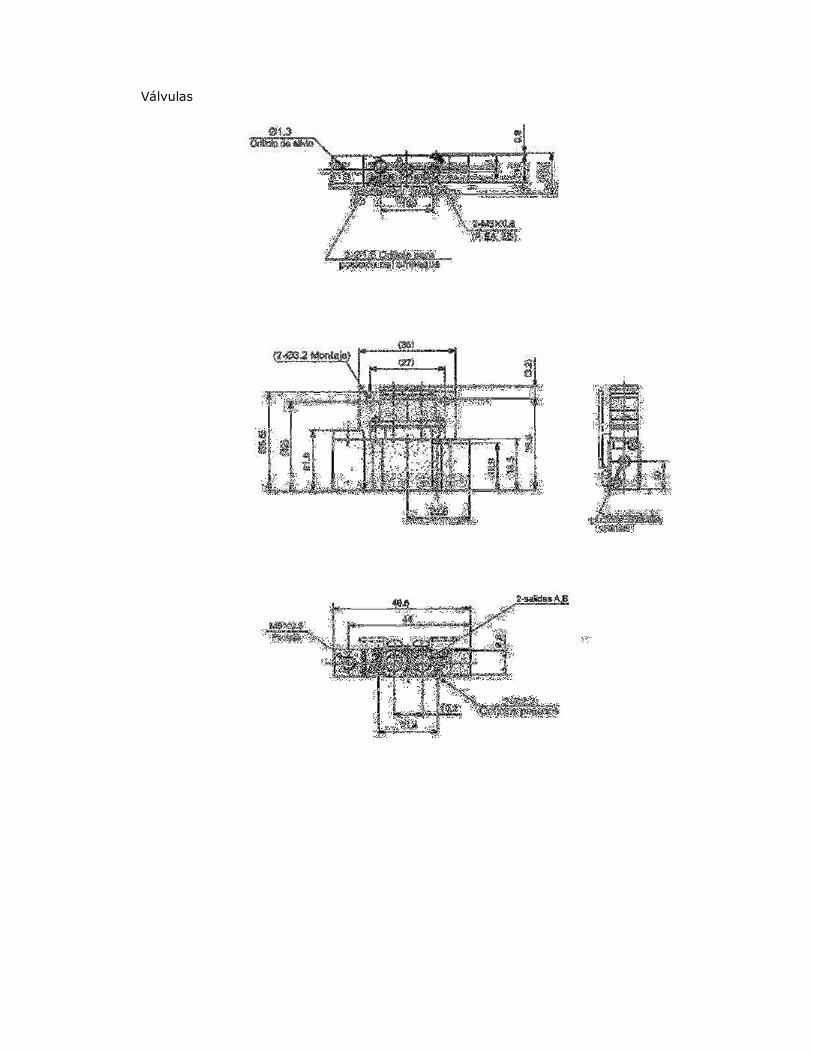
Válvulas
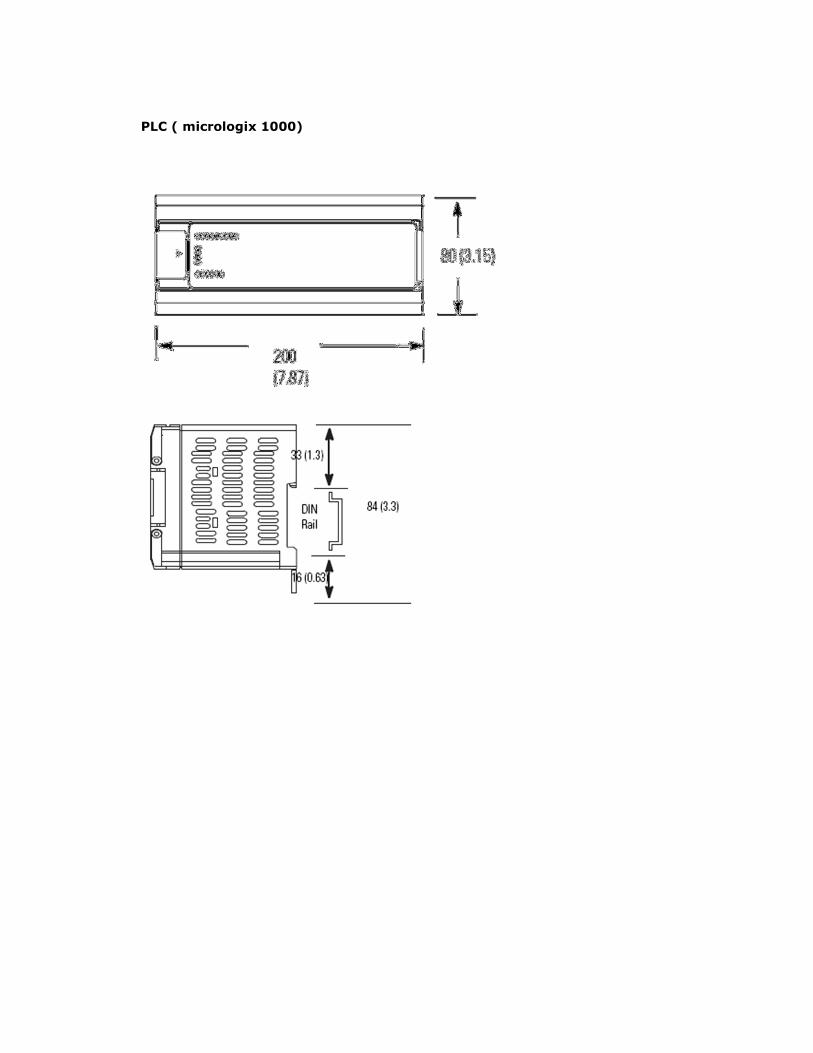
PLC ( micrologix 1000)

Estructura


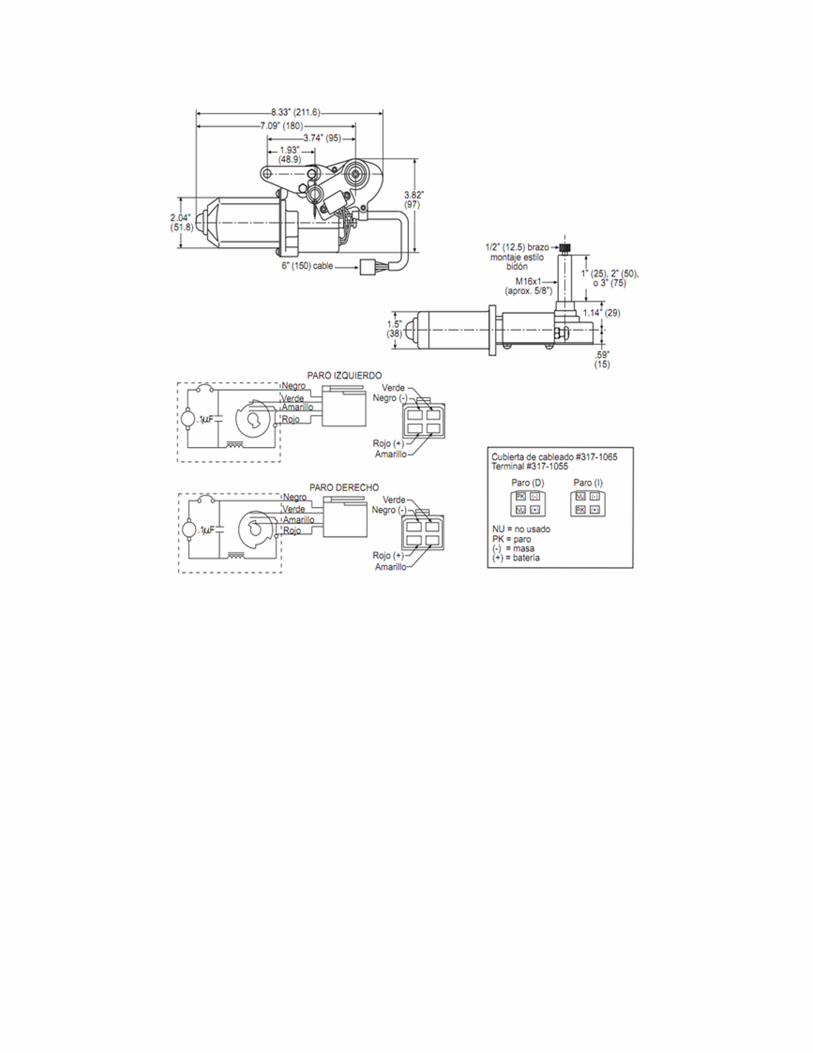
Motor Limpiaparabrisas
• 12 Nm (ver tabla de conversión en la página de información)
• Filtro antiparasitario y disyuntor
• Ángulo de barrido disponible en 65°, 85°, 100°, y 110°
• Posición de parada configurable hacia la derecha o izquierda
(Cambiando la ubicación del borne en el cableado)
• Eje oscilante de acero inoxidable
• Eje armazón de latón
• Ejes disponibles en longitudes de 1” (25 mm), 2” (50 mm) y 3” (75 mm)
• Disponible en 12V o 24V CC
• Especificación de la clase nava
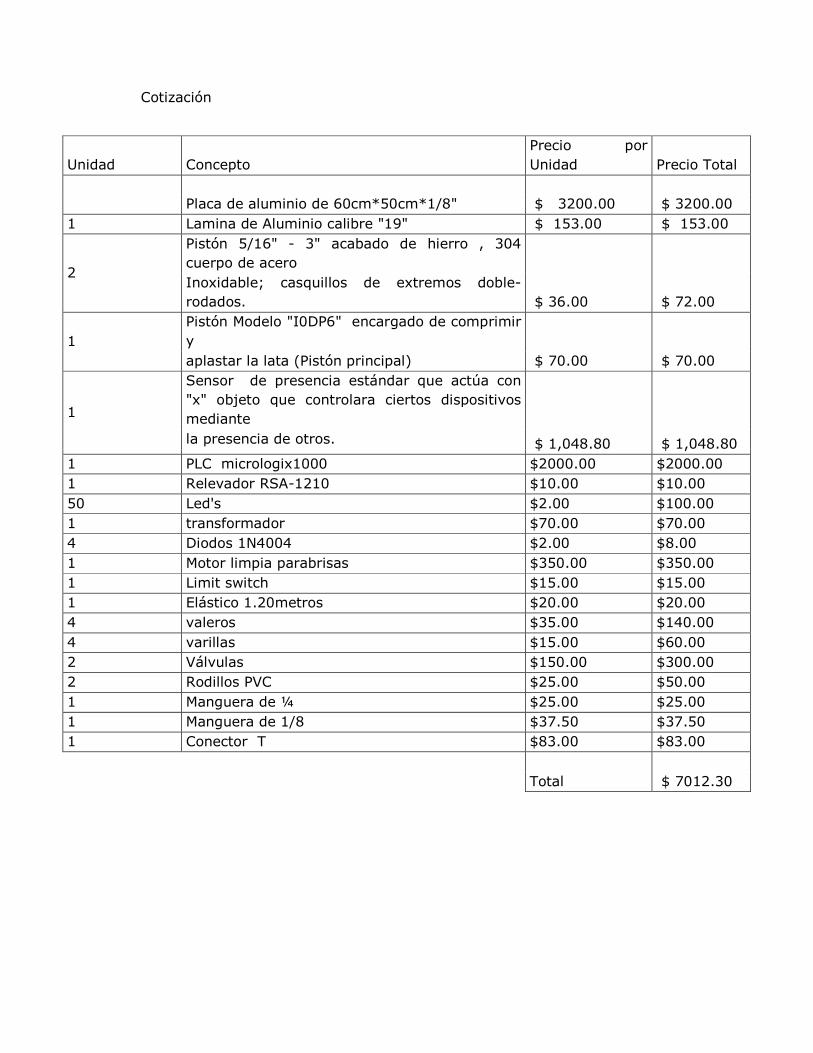
Cotización
Unidad Concepto Precio por Unidad Precio Total
$ 3200.00 $ 3200.00 Placa de aluminio de 60cm*50cm*1/8" 1 Lamina de Aluminio calibre "19" $ 153.00 $ 153.00
2
Pistón 5/16" - 3" acabado de hierro , 304 cuerpo de acero
$ 36.00 $ 72.00 Inoxidable; casquillos de extremos doble-rodados.
1 Pistón Modelo "I0DP6" encargado de comprimir y
$ 70.00 $ 70.00 aplastar la lata (Pistón principal)
1
Sensor de presencia estándar que actúa con "x" objeto que controlara ciertos dispositivos mediante
$ 1,048.80 $ 1,048.80 la presencia de otros.
1 PLC micrologix1000 $2000.00 $2000.00 1 Relevador RSA-1210 $10.00 $10.00 50 Led's $2.00 $100.00 1 transformador $70.00 $70.00 4 Diodos 1N4004 $2.00 $8.00 1 Motor limpia parabrisas $350.00 $350.00 1 Limit switch $15.00 $15.00 1 Elástico 1.20metros $20.00 $20.00 4 valeros $35.00 $140.00 4 varillas $15.00 $60.00 2 Válvulas $150.00 $300.00 2 Rodillos PVC $25.00 $50.00 1 Manguera de ¼ $25.00 $25.00 1 Manguera de 1/8 $37.50 $37.50 1 Conector T $83.00 $83.00
$ 7012.30 Total
Conclusión El proyecto realizado cumplió con las expectativas del equipo que se planteó en un principio de su desarrollo. Este proyecto es funcional que contiene conocimientos de autocontrol y nos permite ver el proceso que debe realizar mediante dispositivos controlados electrónicamente, neumáticamente y mecánicamente. Con el desarrollo del mismo nos ayudó a obtener habilidades que no teníamos ya que llegamos a tener desacuerdos con miembros de nuestro equipo ya que no estábamos acostumbrados realizar trabajos de este tipo con personas que no estaban allegadas a nuestro círculo de amigos. Ahora contamos con bases sólidas en la automatización además de desarrollar lo que planteamos físicamente en plano que no lo es, es decir plasmarlo en programas computacionales que muestren los dispositivos de una manera más detallada así como la elaboración de los dispositivos en 3D. Ahí aprendidos a tener un mejor manejo en los programas que tienen que ver con la realización de circuitos electrónicos. Nos llevamos la satisfacción de haber realizado un proyecto en cual pusimos todo nuestro empeño para poder sobre llevarlo de una manera adecuada, no fue fácil ya que lo desarrollamos en un tiempo después de lo recomendado, por la falta de habilidad y por problemas de comunicación entre los miembros del equipo. Pero pese a las dificultades logramos dejar los problemas aun lado. Para terminar esperamos que sea de su agrado el trabajo realizado por nosotros.