Project1:Layout 1
66
Volumen 22, no.3 Extensión productiva de Brasil Pozos de alcance extendido Pruebas de pozos Oilfield Review
Transcript of Project1:Layout 1

Volumen 22, no.3
Extensión productiva de Brasil
Pozos de alcance extendido
Pruebas de pozos
Oilfield Review

11-OR-0004-S

La industria del petróleo y el gas está concentrando gran parte de su atención en los éxitos que está registrando Brasil en materia de exploración y producción en aguas profundas, como lo atestiguan los 50 000 visitantes y 1 300 expositores que asistieron a la Conferencia y Exposición del Petróleo y el Gas de Río de Janeiro, realizada en septiembre de 2010. El Instituto Brasileño de Petróleo, Gas y Biocombustibles (IBP) auspicia este evento bienal. Los obje-tivos del IBP son la representación efectiva de la industria, la concientización de la población acerca de la industria del petróleo y el gas, la seguridad, el fomento del desarro-llo técnico y la protección del medio ambiente del país.
Los participantes de la conferencia se mostraron muy interesados en el descubrimiento de grandes volúmenes de reservas de petróleo en las aguas ultraprofundas de la ten-dencia presalina (presalt trend) de Brasil. La importancia de esta tendencia fue resaltada recientemente por el incre-mento de la capitalización de Petrobras a través de la venta de nuevas acciones por valor de USD 67 000 millones, lo que proporciona los recursos monetarios necesarios para la consolidación del plan de desarrollo del área presalina.
El plan de negocios de la compañía, bajo la influencia significativa del desarrollo de las áreas prospectivas de la región postsalina, establece un objetivo de producción de 620 000 m3/d [3.9 MMbbl/d] para el año 2014. Una vez que se establezca la producción de los campos presalinos, esta meta se elevará a 860 000 m3/d [5.4 MMbbl/d] en el año 2020. Este nuevo objetivo duplica la producción de Brasil, cuyo nivel actual es de unos 320 000 m3/d [2 MMbbl/d]. El valor estimado de las inversiones de Petrobras para el play presalino a lo largo del quinquenio 2010-2014 es de USD 30 900 millones.
La gran extensión del play presalino requerirá varios años de perforación y desarrollo, demandando innovaciones en tecnología y logística, además de la capacidad para identificar y capitalizar las economías de escala. La situación es similar al desarrollo inicial de la cuenca de Campos, llevado a cabo en la década de 1970. Hoy, la nación se encuentra mucho más preparada tecnológicamente gracias a la experiencia adquirida por Petrobras, los otros opera-dores y las compañías de servicios que participaron en el enorme desafío de explorar y producir petróleo en el área de aguas profundas y ultraprofundas frente al litoral del sudeste de Brasil (véase “El play presalino de Brasil,” página 28).
Más allá de los desafíos impresionantes que implican las operaciones de perforación en aguas ultraprofundas, la tendencia presalina requiere nuevos procedimientos de prospección. Los métodos innovadores de adquisición y pro-cesamiento de datos sísmicos ahora permiten la generación de imágenes por debajo de 2 000 m [6 600 pies] de sal.
Un nuevo escenario posiciona a Brasil a la vanguardia de las operaciones de E&P en aguas profundas
1
La heterogeneidad común a los yacimientos carbonatados sólo incrementa la dificultad asociada con la selección de objetivos por debajo de la capa de sal. Los avances introducidos en las tecnologías electromagnéticas y magnetotelúricas están ayudando a complementar la interpretación sísmica para definir la presencia de rasgos y formaciones salinas por debajo de la sal. Además, se están desarrollando modelos geomecánicos para ayudar a los perforadores a anticipar los efectos de la sal sobre el pozo y luego asistir a los ingenieros de yacimientos en la predicción de los cambios producidos en el desempeño del campo después de iniciada la producción.
Las oportunidades generadas por los descubrimientos presalinos plantean una motivación contundente para la totalidad de la cadena del sector de bienes y servicios de E&P. Brasil acaba de crear un parque industrial cuyo propósito es agregar valor al petróleo a ser extraído del play presalino. La capacidad tecnológica desarrollada por el Centro de Investigaciones de Petrobras, combinada con los nuevos centros de investigaciones de los grandes proveedo-res de servicios —entre los que se encuentran el Centro de Investigaciones y Geoingeniería de Schlumberger en Brasil, ahora en construcción— permitirá la integración de los conocimientos necesarios para superar los desafíos de las operaciones de exploración y desarrollo del área presalina.
Estamos convencidos de que las enormes vallas tecnoló-gicas, logísticas y financieras inherentes al desarrollo de esta provincia extraordinaria serán superadas y sabemos que los logros de Brasil en este ámbito constituirán un punto de referencia por el cual se medirán las operaciones mundiales de exploración y producción de petróleo en aguas ultraprofundas.
João Carlos de Luca Presidente del Instituto Brasileño de Petróleo, Gas y BiocombustiblesRío de Janeiro, Brasil
João Carlos de Luca es presidente del Instituto Brasileño de Petróleo, Gas y Biocombustibles. Su amplia carrera en la industria del petróleo y el gas incluyó las posiciones de gerente general para la cuenca de Campos, director gerente de E&P, miembro del Directorio de Petrobras y asesor del Directorio de Braspetro (Petrobras International). Ayudó a fundar la subsidiaria brasileña de YPF, fue miembro del directorio de YPF y posteriormente se convirtió en presidente de Repsol YPF Brasil. Además, presidió el 17o Congreso Mundial del Petróleo realizado en Río de Janeiro en el año 2002 y fue miembro de la Junta Ejecutiva del Congreso Mundial del Petróleo. Joao es ingeniero civil con títulos académicos de la Universidad Federal de Paraná, en Curitiba, Brasil.

www.slb.com/oilfieldreview
Schlumberger
Oilfield Review1 Un nuevo escenario posiciona a Brasil a la vanguardia
de las operaciones de E&P en aguas profundas
Artículo de fondo aportado por João Carlos de Luca, presidente del Instituto Brasileño de Petróleo, Gas y Biocombustibles.
4 Pozos de alcance extendido
Los pozos de gran longitud y alto ángulo permiten a los operadores explotar reservas en algún momento consideradasmás allá de su alcance económico. Para aprovechar al máximo esta tecnología, los operadores deben considerarcada pozo de alcance extendido como un proyecto de ingeniería único que dé cuenta de los objetivos de perfora-ción y terminación desde las primeras etapas de planeaciónhasta la producción inicial.
16 Robots al rescate
Los robots desempeñan una diversidad de roles en la industria y la sociedad modernas. Su introducción comercial,acaecida en la década de 1950, fue seguida por un proceso de aceptación gradual en el ámbito de la manufactura; noobstante, recientemente, se ha experimentado un rápido crecimiento tanto en las aplicaciones domésticas como en las aplicaciones comerciales. Este artículo describe las perspectivas históricas del campo de la robótica y analiza el desarrollo de la robótica para ser utilizada en las fábricas,los campos petroleros, el espacio exterior y el hogar.
Editor ejecutivoMark A. Andersen
Editor consultorLisa Stewart
Editores seniorMatt VarhaugRick von Flatern
EditoresVladislav GlyanchenkoTony SmithsonMichael James Moody
ColaboradoresRana RottenbergGinger Oppenheimer
Diseño y producciónHerring DesignSteve Freeman
IlustracionesChris LockwoodMike MessingerGeorge Stewart
ImpresiónWetmore Printing CompanyCurtis Weeks
Traducción y producciónLynx Consulting, Inc.
E-mail: [email protected];http://www.linced.com
TraducciónAdriana RealEdiciónAntonio Jorge TorreSubediciónNora RosatoDiagramaciónDiego Sánchez
2
Dirigir la correspondencia editorial a:Oilfield Review1325 S. Dairy Ashford Houston, Texas 77077 EUA(1) 281-285-7847Facsímile: (1) 281-285-1537E-mail: [email protected]
Dirigir las consultas de distribución a:Joao FelixTeléfono: (55) 21 3541 7008 (Vivian)Directo: (55) 21 3541 7104 Facsímile: (55) 21 2112 4601E-mail: [email protected]
Sussumu NakamuraTeléfono: (55) 21 3824 7461 (Patricia)Directo: (55) 21 3824 7460Facsímile: (55) 21 2112 4601E-mail: [email protected]
Enlaces de interés:
Schlumbergerwww.slb.com
Archivo del Oilfield Reviewwww.slb.com/oilfieldreview
Glosario del Oilfield Reviewwww.glossary.oilfield.slb.com

Marzo de 2011Volumen 22
Número 3
57 Colaboradores
60 Nuevas publicaciones y próximamente en Oilfield Review
3
40 Objetos grandes en paquetes pequeños
La industria del petróleo y el gas está explorando la aplicación de nanotecnologías para localizar y extraer reservas de petróleo y gas. Este artículo introduce los fundamentos de la nanotecnología, describe sus aplicacionesen la industria médica, electrónica y cosmética, y analiza el potencial para los proyectos basados en nanomateriales en la producción de hidrocarburos.
28 El play presalino de Brasil
La producción proveniente de los yacimientos turbidíticos carbonatados y clásticos de la prolífica cuenca de Campos enBrasil puede ser superada debido a la presencia de una ten-dencia más profunda, originada en las adyacencias. Se ha des-cubierto un campo gigante por debajo de una capa evaporíticade gran espesor presente en la cuenca de Santos, y las campa-ñas de perforación llevadas a cabo en las cuencas vecinas estánprolongando esta extensión productiva (play) hacia el norte.
52 El separador de próxima generación: Un cambio de reglas
Las pruebas de pozos constituyen desde hace tiempo unaherramienta crítica de exploración y desarrollo de petróleo ygas. Durante más de 25 años, los separadores utilizados paraestas operaciones esenciales se mantuvieron básicamenteinalterados. Ahora, las innovaciones aplicadas a un estándarantiguo prometen eliminar las costosas demoras, reducir elriesgo ambiental y mejorar la precisión.
Abdulla I. Al-KubaisySaudi AramcoRas Tanura, Arabia Saudita
Dilip M. KaleONGC Energy CentreNueva Delhi, India
Roland HampWoodside Energy, Ltd.Perth, Australia
George KingApache CorporationHouston, Texas, EUA
Richard WoodhouseConsultor independienteSurrey, Inglaterra
Consejo editorial
En la portada:
Las zonas de fractura de rumbo este-oeste presentes en el fondo marino trazan el trayecto de la derivacontinental, generando la separaciónentre América del Sur y África. El playpresalino de Brasil —que incluye elcampo Jubarte (círculo rojo) de la cuenca de Campos— es en gran parte el resultado de esta separación de loscontinentes. La embarcación flotante de producción, almacenamiento y descarga (FPSO) P-57 de Petrobras,recién inaugurada (inserto, extremosuperior izquierdo), prestará servicios aese campo y servirá como modelo para eldiseño y la construcción de las FPSO des-tinadas a la agrupación presalina de la cuenca de Santos. (Fotografía, cortesía de Keppel Offshore & Marine.Mapa adaptado de Grothe PR: ETOPO1Ice Surface Global Relief Model. Boulder,Colorado, EUA: Instituto Cooperativopara la Investigación en CienciasAmbientales, 2009.)
Oilfield Review es una publicación tri-mestral de Schlumberger destinada a losprofesionales de la industria petrolera,cuyo objetivo consiste en brindar infor-mación acerca de los adelantos técnicosrelacionados con la búsqueda y produc-ción de hidrocarburos. Oilfield Review sedistribuye entre los empleados y clientesde Schlumberger y se imprime en losEstados Unidos de Norteamérica.
A menos que se indique lo contrario, lassiglas que aparecen en esta publicacióncorresponden al idioma inglés.
Cuando se menciona sólo el lugar deresidencia de un colaborador, significaque forma parte del personal deSchlumberger.
© 2011 Schlumberger. Todos los dere-chos reservados. Ninguna parte de estapublicación puede ser reproducida, archi-vada o transmitida en forma o medioalguno, ya sea electrónico o mecánico,fotocopiado o grabado, sin la debidaautorización escrita de Schlumberger.

4 Oilfield Review
Pozos de alcance extendido
En los últimos años, la industria del petróleo y el gas ha perfeccionado su capacidad
para perforar pozos de alto ángulo cada vez más largos, a lo largo de trayectos cada
vez más complejos. Hoy, las longitudes horizontales de estos pozos de alcance
extendido se miden en kilómetros y en millas, y múltiples depósitos aislados se
vinculan con un solo pozo.
Bjarne BennetzenMaersk Oil Qatar ASDoha, Qatar
John FullerGatwick, Inglaterra
Erhan IsevcanDoha, Qatar
Tony KreppRichard MeehanNelson Mohammed The Woodlands, Texas, EUA
Jean-Francois PoupeauHouston, Texas
Kumud SonowalZakum Development CompanyAbu Dhabi, Emiratos Árabes Unidos
Traducción del artículo publicado en Oilfield Review, Otoño de 2010: 22, no. 3.Copyright © 2011 Schlumberger.Por su colaboración en la preparación de este artículo, se agradece a Emma Jane Bloor y Mike Williams, Sugar Land, Texas.DrillMAP, PowerDrive X5 y PowerDrive Xceed son marcas de Schlumberger.

Volumen 22, no. 3 5
La tecnología innovadora se caracteriza por su capacidad para abrir nuevos horizontes. En el mundo de las operaciones de perforación de alcance extendido, ese estándar es literal. En 1997, BP estableció la pauta cuando perforó una sección horizontal de más de 10 km [aproximada-mente 6 millas] en un pozo de su campo Wytch Farm, en Inglaterra.1 Desde entonces, la indus-tria ha superado reiteradas veces esa marca. En el momento de la preparación de este artículo, la longitud horizontal récord era superior a 10,9 km [6,8 millas] y la profundidad medida récord era de 12,3 km [7.6 millas], en un pozo del área marina de Qatar.2
En pos de la explotación de sus propias reser-vas aisladas, a través de operaciones de perfora-ción de alcance extendido (ERD), los operadores pueden verse tentados a repetir lo que se ha hecho antes. No obstante, dado que los cambios aparentemente pequeños en los parámetros de los pozos ERD pueden producir impactos signifi-cativos sobre las opciones de terminación, es esencial que los ingenieros planifiquen cada pozo de alcance extendido como un proyecto de inge-niería único.
Por ejemplo, para facilitar la instalación de terminaciones inteligentes, es importante que el pozo posea un diámetro relativamente grande y un perfil suave. Los pozos inteligentes a menudo cuentan con sartas de producción con instrumen-tos instalados en la parte externa. Esos equipos pueden dañarse durante la instalación si el espa-cio anular existente entre el tubular y las paredes de la tubería de revestimiento es demasiado estrecho o irregular. Por el contrario, una termi-nación menos compleja ofrece al operador el lujo de poder rotar la tubería de revestimiento o apli-car grandes cargas para que sortee altos ángulos y puntos estrechos, eliminando de ese modo la necesidad de proveer un espacio anular extra en el programa de perforación.
Un proceso de planeación adecuado debe incluir medidas de seguimiento. A la hora de eje-cutar los planes de ERD, los ingenieros de perfo-ración experimentados a menudo llevan a cabo operaciones aparentemente familiares de un modo no familiar. Para garantizar que todos los involucrados realicen sus tareas según las direc-trices estipuladas en materia de perforación
ERD, es esencial el entrenamiento en las mejores prácticas tanto para el personal de campo como para el personal de oficina.
Gran parte del avance en materia de perfora-ción de secciones horizontales más largas se ha atribuido al mejoramiento de la tecnología en dos áreas: capacidades de direccionamiento más sen-sibles y capacidades de obtención de mediciones en tiempo real más precisas. No obstante, este artículo se concentra en un tercer componente del avance de la industria: el desarrollo de mejo-res prácticas y la importancia de conectar las lecciones aprendidas a partir de la ingeniería, la tecnología, el entrenamiento, la supervisión y el análisis posterior a la operación, con la perfora-ción del pozo de alcance extendido siguiente.
1. Para obtener más información sobre el campo Wytch Farm, consulte: Allen F, Tooms P, Conran G, Lesso B y Van de Slijke P: “Extended-Reach Drilling: Breaking the 10-km Barrier,” Oilfield Review 9, no. 4 (Invierno de 1997): 32–47.
2. Sonowal K, Bennetzen B, Wong P y Isevcan E: “How Continuous Improvement Led to the Longest Horizontal Well in the World,” artículo SPE/IADC 119506, presentado en la Conferencia y Exhibición de Perforación de las SPE/IADC, Ámsterdam, 17 al 19 de marzo de 2009.

6 Oilfield Review
Definición de pozos ERDUn pozo ERD se define como aquél que posee una relación desviación horizontal-profundidad verti-cal verdadera (HD/TVD) de más de 2,0 (arriba). Esta relación constituye una indicación cruda de la complejidad del pozo: cuanto más alta es la rela-ción, más complejo es el pozo. Pero se trata sola-mente de un indicador básico de la dificultad que implicará la perforación y la terminación del pozo.
Las operaciones de perforación que apuntan a objetivos localizados a una distancia horizontal significativa respecto de la localización superfi-cial, requieren algo más que perforar en sentido vertical, girar y perforar en sentido horizontal. Dependiendo de características de la formación tales como temperatura, presión y propiedades de las rocas, el personal de perforación determina el
peso a aplicar sobre la barrena (WOB), las rpm de la sarta de perforación, la densidad del lodo y otros parámetros. Todos estos parámetros son ajustados por la trayectoria planificada del pozo, y por el incremento y la reducción angular, y los giros acimutales necesarios para lograrla. Esto último se ha convertido en un factor significativo en la planeación de pozos de alcance extendido en los últimos años ya que la sofisticada tecnolo-gía de perforación direccional y LWD permitió a los operadores utilizar trayectos de pozos 3D menores en número, pero más complejos, para optimizar el desarrollo de los yacimientos.
Además, los pozos de alcance extendido se clasifican en general como pozos con una TVD muy profunda o muy somera (próxima página) y cada uno presenta sus propios desafíos. Los pozos
muy largos, o de alcance ultra extendido, pueden ser difíciles de perforar y terminar porque es posible que experimenten grandes esfuerzos de torsión y arrastre. Las presiones de circulación pueden ser elevadas para superar las pérdidas por fricción a medida que el fluido de perforación es bombeado por la sarta de perforación, y sus-tentar el espacio anular existente entre las pare-des del pozo y la sarta de perforación.
Los pozos con una TVD somera normalmente son perforados en formaciones no consolidadas con gradientes de fracturas relativamente bajos. La estrecha ventana entre el gradiente de pre-sión de poro y el de fractura resultante cobra más importancia a medida que el pozo se extiende en sentido horizontal y las densidades de circulación equivalentes (ECD) continúan incrementándose.3 Además, cuando la distancia existente entre el equipo de perforación y la sección yacimiento de interés es relativamente corta, es probable que los pozos someros deban ser desviados de la verti-cal formando un ángulo agudo. La trayectoria resultante puede generar problemas de torque y flexión (buckling) en la columna de perforación y en los tubulares utilizados en la terminación.4
Cuando un pozo de alcance extendido incluye una TVD profunda, también puede estar limitado por la tensión de la sarta de perforación y los grandes esfuerzos laterales que introducen pro-blemas de desgaste de la tubería de revestimiento y la columna de perforación.
Entre los subconjuntos de estos tipos de pozos básicos se encuentran los pozos de aguas profun-das, los pozos 3D y aquellos pozos cuyo diseño está restringido por las limitaciones del equipo de per-foración disponible. Los pozos de alcance exten-dido en aguas profundas son poco comunes porque normalmente conviene más desplazar un equipo de perforación flotante hacia la formación objetivo que perforar en sentido horizontal. No obstante, a medida que declinan las tasas de producción en las plataformas de producción fijas de aguas pro-fundas, es probable que los campos para los que operan se conviertan en candidatos para la perfo-ración de pozos de alcance extendido, diseñados para la conexión con los yacimientos lejanos.
Cuando un pozo de alcance extendido de aguas profundas constituye una opción más efec-tiva, los gradientes de fracturas bajos —causados por el reemplazo de miles de pies de estratos de sobrecarga por agua— exacerban la necesidad de manejar la densidad ECD más exhaustiva-mente. Por otro lado, debido a la larga sección vertical existente entre el fondo marino y la superficie, el peso suspendido del aparejo móvil del equipo de perforación es mayor, y la tensión de la tubería se incrementa significativamente.
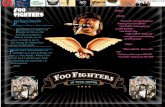
> Extensión del alcance. La relación desviación horizontal-profundidad vertical verdadera (HD/TVD) se ha incrementado a un ritmo constante desde mediados de la década de 1970 (extremo superior). Tradicionalmente, un pozo cuya relación HD/TVD es de 2,0 o mayor, se considera un pozo de alcance extendido. Aquí, los pozos profundos con una desviación horizontal considerable también se clasifican como pozos de alcance extendido. Para el año 2010, los operadores habían perforado numerosos pozos con relaciones superiores a 4,0 (extremo inferior). El pozo BD-04A del campo Al-Shaheen estableció una desviación horizontal récord de 37 956 pies.
Prof
undi
dad
verti
cal v
erda
dera
, pie
s
Desviación horizontal, pies
Operaciones mundiales de perforación de pozos de alcance extendido
Rick_ERD_Figure 01
0
5 000
10 000
15 000
20 000
25 000
30 000
35 000
40 00040 00035 00030 00025 00020 00015 00010 0000 5 000
Prof
undi
dad
verti
cal v
erda
dera
, pie
s
Desviación horizontal, pies
0
5 000
10 000
15 000
20 00040 00035 00030 00025 00020 00015 00010 0000 5 000
Hasta 1975Hasta 1980Hasta 1985Hasta 1990Hasta 1995Hasta 2000Hasta 2005Hasta 2010
Alcance corto Alcance intermedioAlcance extendidoAlcance ultra-extendidoPozo ERD
4.03.0
2.0

Volumen 22, no. 3 7
Esta tensión extra genera grandes esfuerzos late-rales, que pueden producir el desgaste de la tube-ría de revestimiento cuando la columna de perforación se extrae del pozo a través de seccio-nes de incrementos y reducciones angulares, durante las operaciones de rectificación.5
Además, las operaciones de aguas profundas afectan las propiedades de los fluidos de perfora-ción de una forma que puede incidir en el pro-ceso de limpieza del pozo. A medida que el lodo viaja desde la superficie, se enfría significativa-mente por la acción del agua del fondo marino que se encuentra próxima al punto de congela-miento. Luego, se calienta hasta alcanzar las temperaturas de la formación en la barrena, antes de readquirir la temperatura del fondo marino en la base del tubo ascendente. Este pro-ceso puede modificar la reología del lodo de per-foración, afectando su capacidad de transporte o las cargas ECD impuestas sobre el pozo. En los pozos de alcance extendido, las densidades del lodo deben controlarse cuidadosamente. Ésta es otra de las instancias en las que el margen de error es menor en los pozos de alcance extendido que en los pozos verticales.
Los pozos 3D complejos proliferaron en los últimos años, acompañando el desarrollo y la adopción de herramientas de perforación rota-tiva direccional y MWD cada vez más sofisticadas por parte de la industria. Estos pozos se caracte-rizan por los numerosos y significativos cambios de acimuts diseñados para mantener el pozo en conformidad con sus objetivos.
Los pozos limitados en términos de equipos de perforación son los pozos perforados desde unida-des de perforación con un grado inadecuado de carga en el gancho o capacidad de bombeo.6 Muchos ingenieros de perforación tratan a estos pozos como una categoría ERD diferente porque las deficiencias del equipo de perforación los obliga a utilizar tecno-logía que de lo contrario no se requeriría.
La fase de planeaciónLos pozos de alcance extendido se perforan por numerosas razones: para contactar el mayor volu-men de yacimiento posible con el pozo, para acceder a varios depósitos de hidrocarburos de amplia distribución desde una sola localización, o para eliminar las operaciones de superficie de las áreas ambientalmente sensibles. Determinado por los problemas ambientales, uno de los pro-gramas ERD más exitosos se llevó a cabo en el campo Wytch Farm de BP, situado en la costa sur de Inglaterra. En 1993, el operador optó por acce-der a los depósitos marinos de petróleo situados por debajo de Poole Harbour, mediante pozos de largo alcance y alto ángulo perforados desde loca-lizaciones superficiales, estrechamente espacia-das en tierra firme. El primer pozo tenía un alcance horizontal de 3,8 km [2,4 millas]. El pro-yecto culminó en el año 1999 con un pozo cuyo alcance horizontal fue de 10,9 km.
En la época en que superó la marca de 10 km, BP utilizaba equipos de 100 personas, que repre-sentaban a todas las entidades involucradas en la campaña de perforación. Antes de comenzar cada
pozo, el personal asignado se reunía para asistir a talleres de uno o dos días. Primero se les infor-maba cómo se relacionaban los objetivos globales de la compañía con las metas, el diseño, el costo y la viabilidad comercial del pozo del campo Wytch Farm que estaban planificando. Luego, los ingenieros especialistas en subsuelo, perfora-ción, perforación direccional, lodo y terminacio-nes, describían los detalles técnicos y los peligros potenciales del pozo cuya perforación estaba por iniciarse.7
A continuación, los equipos se dividían en grupos más reducidos, de cinco a ocho personas, que revisaban y establecían los tiempos previstos para cada fase del pozo, tal como la perforación
3. ECD es la densidad efectiva ejercida por un fluido en circulación contra la formación. La densidad ECD se calcula como: d + P/(0.052D), donde d es el densidad del lodo en libras por galón (ppg), P es caída de presión en el espacio anular entre la profundidad D y la superficie (psi), y D es la profundidad vertical verdadera (pies).
4. Mims M y Krepp T: Drilling Design and Implementation for Extended Reach and Complex Wells, 3a ed. Houston: K&M Technology Group, 2007.
5. En las operaciones de rectificación, se pasa una herramienta de diámetro externo (OD) mayor que la barrena a través de una sección del pozo perforada previamente, para incrementar el diámetro del pozo.
6. La carga en el gancho es la fuerza total que baja el gancho del equipo de perforación, al que está fijado todo el equipamiento de perforación —incluidos el vástago de perforación, la mesa rotativa y la sarta de perforación— y desde el cual se baja o se extrae del pozo todo el resto del equipamiento.
7. Meader T, Allen F y Riley G: “To the Limit and Beyond–The Secret of World-Class Extended-Reach Drilling Performance at Wytch Farm,” artículo IADC/SPE 59204, presentado en la Conferencia de Perforación de las IADC/SPE, Nueva Orleáns, 23 al 25 de febrero de 2000.
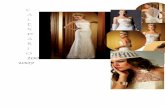
> Tipos básicos de pozos de alcance extendido. Los pozos de alcance extendido corresponden a dos categorías: pozos muy someros o pozos muy largos (extremo superior, líneas negras). Cada uno plantea sus propios desafíos y ninguno alegó relaciones HD/TVD más altas (líneas de guiones). Los perfiles de los pozos de alcance extendido pueden ser clasificados como perfiles de pozos de sección angular y sección tangencial (o de ángulo sostenido); parte del trayecto del pozo, que sigue a la sección de incremento angular, donde el ángulo y la dirección se mantienen constantes) (B&H), catenarias, en forma de S o complejos (extremo inferior). El perfil B&H se perfora con un ángulo constante una vez establecido la sección tangencial a partir del punto de comienzo de la desviación. Los pozos B&H requieren un grado mínimo de perforación y de control direccional. El perfil de pozo catenario constituye una variación del trayecto de pozo B&H. Comienza con una tasa inicial más baja de incremento angular (medida en grados por cada 100 pies perforados) que se acelera a medida que se incrementa el ángulo del pozo. Este diseño se elige a menudo para reducir los problemas de torque. Los pozos catenarios poseen mayor longitud general (MD) y secciones tangenciales más altas que los perfiles de los pozos B&H. El perfil de pozo en forma de S se caracteriza por una sección tangencial con un ángulo más alto que los pozos B&H, antes de la reducción del ángulo para conformar un ángulo más vertical al ingresar en el objetivo. Este enfoque permite reducir la incertidumbre a la hora de ajustar los datos TVD con los datos del levantamiento. Además, permite reducir el tiempo de perforación en zonas objetivo abrasivas, cuya estabilidad puede depender del tiempo, o cuando el manejo de la ECD se vuelve complicado. Los perfiles de pozos complejos, caracterizados por una tercera dimensión, se generan mediante el agregado de uno o más giros acimutales a los pozos de alto ángulo. Si bien son más difíciles de ejecutar que otros perfiles, los trayectos de pozos complejos permiten al operador penetrar más objetivos con un solo pozo.
Rick_ERD_Figure 02
3,02,01,0
4,0
5,0
6,0
Prof
undi
dad
verti
cal v
erda
dera
Desviación horizontal
Punto de comienzo de la desviación
Sección tangencial
Sección de incremento angular
Giros acimutalesComplejo
En forma de SB&H
Catenaria
Desviación horizontal
Prof
undi
dad
verti
cal v
erda
dera

8 Oilfield Review
de una sección o la bajada y la cementación de una sarta de revestimiento. Cada una de estas fases se dividía luego en componentes más pequeños. Los grupos pequeños llevaban sus con-clusiones al equipo reunido y creaban un plan de perforación integral a partir de las distintas pie-zas. A lo largo de toda la perforación del pozo, el equipo medía el avance real y los objetivos en función del plan, y dedicaba tiempo al análisis de
las causas raíces de cualquier problema que hubiera ocurrido.8
Este grado de meticulosidad en el proceso de planeación y seguimiento es ideal para los pozos complejos y de alcance extendido, y los especia-listas a menudo citan el enfoque de BP como la razón de los éxitos del campo Wytch Farm. La clave para la ejecución de planes adecuados de ERD consiste en que sean detallados y específi-
cos para cada pozo. También es útil formar y man-tener un equipo con representantes de todas las disciplinas relevantes, desde el comienzo del pro-yecto hasta su conclusión.
El tiempo necesario para planificar adecua-damente un pozo de alcance extendido depende de numerosos factores, entre los que se encuen-tran la profundidad, longitud y complejidad del pozo, la disponibilidad de equipos de perforación,
> Planeación de pozos de alcance extendido. Los programas de ERD requieren la ejecución de ciertos pasos importantes que comprenden varias partes, para entregar al campo un programa de perforación. La revisión de los datos de pozos vecinos (OWR) permite a los operadores la identificación de aspectos clave del diseño de pozos ERD. Luego, se genera un diseño preliminar del pozo (PWD) para establecer la factibilidad, los riesgos, los requerimientos de equipos, las necesidades de los contratistas, el alcance de los trabajos y una estimación de costos para el proyecto. Un diseño de pozo detallado (DWD) es un PWD refinado que incluye las especificaciones finales en materia de sarta de perforación, tubería de revestimiento y equipo de perforación, las licitaciones para los contratistas y una estimación mejorada de costos. (Adaptado de Mims y Krepp, referencia 4.)
Rick_ERD_Figure 03
Revisión de datos de pozos vecinos (OWR)
Introducción Alcance del informe Descripción de los pozos revisados Aprendizajes obtenidos a partir de la OWRCampo y geología Información general del campo Topes de formaciones Litología Presión de poro Gradiente de fractura TemperaturaDiseños de pozos Diseños de tuberías de revestimiento Elementos que determinan el diseñoDesempeño de perforación Desempeño en términos de tiempo ROP Tiempo inactivoParámetros de perforación Tasas de flujo, rpm, prácticas utilizadasFluidos de perforación Sistemas de lodo Problemas con el agujeroPerforación direccional Carreras del BHA Desempeño de la perforación direccionalBarrenas Registro de la barrena Comparación de tiposTorque y arrastre Factores de fricción Torque y arrastre de perforación EntubaciónDetalles de la evaluación de formaciones Evaluación de formaciones durante la perforación Operaciones con cable, extracción de núcleos Atascamiento de herramientas, derrumbes, obturacionesCementación Diseño de la lechada Centralización Procedimientos utilizadosPeligros Pérdidas, atascamiento de tuberías Control del pozo Estabilidad del pozo H2S, CO2
Diseño preliminar del pozo (PWD)
Introducción y resumen Alcance del informe SinopsisInformación general del campo y de la geología Posición del pozo ERD en el campo Topes de formaciones Litología Requerimiento del objetivo Presión de poro Presión de fractura TemperaturaInformación general del diseño del pozo Localización en la superficie Diseño de la tubería de revestimiento Diseño del trayecto del pozo Fluidos de perforación Factores de fricciónSecciones de pozo (171/2, 121/4, 81/2 pulgadas) Asuntos clave y prioridades Estrategia direccional Fluidos de perforación Hidráulica Torque y arrastre (T&D) Requerimientos de potencia Gráficas de T&D e hidráulicaTubería de revestimiento (133/8 pulgadas y 95/8 pulgadas) y tubería de revestimiento corta (liner) Procedimientos y equipos de operación CementaciónLimpieza y terminación Gráficas de riesgos de arrastre Rodillos FlexiónEspecificaciones de equipos Cabeza rotativa superior Bombas Malacate Tamaño de la columna de perforación Herramientas de perforaciónReferenciamiento con la industria Comparación con pozos ERD relevantes Comparación de las capacidades de los equipos de perforaciónTiempo y costo +/– 40% del tiempo, costo del PWD
Diseño detallado del pozo (DWD)
Información general del campo y de la geología Aspectos clave por sección de pozo Esquema del yacimiento Presión de poro Gradiente de fractura Gráficas de temperaturaInformación general del diseño del pozo Resumen del trayecto del pozo Resumen de entubación Resumen de cementación Fluidos de perforación Resumen de la barrena y del BHASecciones de pozo (171/2, 121/4, 81/2 pulgadas) Asuntos clave Información general de las soluciones Descripción detallada de los procedimientos Notas especiales Diagramas de T&D Tubería de revestimiento (133/8 pulgadas y 95/8 pulgadas) y tubería de revestimiento corta (liner)
Asuntos clave Información general de las soluciones Descripción detallada de los procedimientos Notas especiales Diagramas de T&D Limpieza y terminación Asuntos clave Información general de las soluciones Descripción detallada de los procedimientos Notas especiales Diagramas de T&DEspecificaciones de equipos Especificaciones finales de equipos Tamaño de la columna de perforación Herramientas de perforaciónTiempo y costo +/– 20% del tiempo, costo del PWD

Volumen 22, no. 3 9
la localización y la logística. Pero muchos inge-nieros consideran que un período de planifica-ción razonable oscila entre 6 y 12 meses, contados desde el momento de la concepción hasta el comienzo de la perforación (página anterior).
El manejo del riesgo —a través del empleo de métodos de referenciamiento, tecnología, entre-namiento y desarrollo de una curva de aprendi-zaje— subyace cualquier proceso de planeación integral de cualquier programa de perforación. No obstante, dado que ciertas medidas que son apropiadas a la hora de perforar pozos convencio-nales pueden incrementar concretamente las incertidumbres asociadas con las operaciones ERD, tales medidas plantean desafíos únicos a la toma de decisiones de los ingenieros.
Por ejemplo, los tamaños de pozos más gran-des que lo necesario se incluyen a menudo en la sección superior de los pozos verticales como plan de contingencia para reducir el riesgo de perforación. Su inclusión permite a los operado-res colocar una sarta extra de tubería de revesti-miento para afrontar presiones o gradientes de fracturas imprevistos o problemas de inestabili-dad del pozo sin reducir su tamaño a través del intervalo productivo.
No obstante, este procedimiento de contin-gencia puede resultar inoportuno en los pozos de alcance extendido por el efecto que puede produ-cir sobre los problemas de limpieza del pozo, tales como el atascamiento de la tubería. Quizás
la decisión más prudente sea renunciar a la flexi-bilidad que proporciona el tamaño más grande de la parte más somera del pozo para perforar pozos de menor diámetro interno (ID), en los que la eliminación de los recortes y los detritos es más sencilla. Por otro lado, en ciertos tipos de forma-ciones, el control direccional puede resultar más difícil en los pozos de gran diámetro.
Un pozo estableComo sucede con todas las operaciones de perfo-ración, la selección de la densidad del lodo, las velocidades de bombeo y los fluidos de perfora-ción, está determinada por el gradiente de frac-tura de la formación, la presión de poro y las pérdidas de presión por fricción en el espacio anular existente entre las paredes del pozo y la columna de perforación. La inestabilidad del pozo, exacerbada cuando se exceden los límites impuestos por estos parámetros, es una de las causas principales de fallas de perforación en todos los tipos de pozos. No obstante, la forma en que los operadores encaran el problema de colapso o derrumbe del pozo difiere según se trate de pozos convencionales o pozos ERD.
En los pozos verticales o desviados, el gra-diente de fractura de la roca habitualmente se incrementa a medida que aumenta la profundidad, con un ritmo más rápido que el del incremento de las pérdidas de presión por fricción. No obstante, cuando un pozo ERD se vuelve esencialmente hori-zontal y la profundidad no cambia, el gradiente de fractura deja de incrementarse en tanto que las densidades ECD continúan aumentando con la longitud del pozo (arriba, a la izquierda).
La lucha contra los efectos del incremento de la ECD es habitualmente una cuestión de reduc-ción de la densidad del lodo, la tasa de flujo o la velocidad de penetración (ROP). Por consi-guiente, a menudo la mejor opción consiste en modificar los factores que producen la fricción a través del incremento del área de flujo, lo que puede realizarse mediante la perforación de un pozo más grande o la reducción del tamaño de la columna de perforación. Ninguna es la solución perfecta. Un pozo ensanchado puede conducir a problemas asociados con la reducción de la ROP. El diámetro más pequeño de la columna de perfo-ración puede hacer que se exceda la presión de la columna ascendente o los límites de las bombas, o puede suceder que la sarta de perforación se vuelva demasiado flexible y se exacerben los pro-blemas de atascamiento/deslizamiento o de direc-cionamiento. El aumento del tamaño del área de flujo creada por la columna de perforación más pequeña o el pozo más grande también puede generar dificultades en la limpieza del pozo.
Cualquiera sea el desafío, la minimización de la inestabilidad del pozo es clave para la satisfac-ción de los objetivos de ERD. En los pozos de alto ángulo, la ventana de densidad del lodo, entre el colapso y la pérdida de lodo, suele ser estrecha; esa limitación se exacerba con las ECD más altas que caracterizan a estos pozos. A raíz de estas condiciones, puede resultar difícil evitar la inesta-bilidad del pozo. Los ingenieros de perforación necesitan saber dónde la deformación y el colapso constituyen un riesgo, para poder planear el manejo adecuado de la estabilidad.
La ejecución de un estudio de estabilidad del pozo previo a la perforación permite identificar zonas con probabilidad de colapsar, proporciona una estimación de la severidad de la amenaza y provee recomendaciones acerca de las densida-des del lodo para manejar la inestabilidad. Por otro lado, el estudio identifica las zonas en riesgo de inestabilidad no controlada que pueden reque-rir la reiteración de la planeación. Dependiendo del estado de los esfuerzos prevalecientes, el colapso puede producirse en cualquiera de los lados, en la parte superior o en la parte inferior del pozo. El estudio de estabilidad del pozo reconoce la orientación probable del colapso y con esta información los ingenieros pueden diseñar proce-dimientos más efectivos de limpieza del pozo.
Algunos tipos de inestabilidad, tales como la perforación a lo largo del plano de estratificación de las lutitas, pueden generar episodios incontro-lables de colapso y resultan particularmente peli-grosos en los pozos ERD.9 Atravesar fallas también es común en esos pozos. Los ingenieros estiman los esfuerzos que actúan sobre estos rasgos de manera de poder modelar su estabilidad. El estu-dio considera la interacción entre el lodo de per-foración y la lutita para prevenir o minimizar el impacto de los incrementos de la presión de poro en la lutita, que pueden conducir a la degrada-ción del pozo dependiente del tiempo. Para evitar éstos y otros problemas, los especialistas también utilizan un modelo geológico durante el mode-lado de la estabilidad del pozo.
Los resultados del estudio se entregan a tra-vés del software de planeación y manejo de la perforación DrillMAP. Esta herramienta propor-ciona una predicción de la estabilidad del pozo para el trayecto del pozo específico, identifica los peligros de perforación y recomienda densidades
8. Meader et al, referencia 7.9. Tan CP, Rahman SS, Richards BG y Mody FK: “Integrated
Approach to Fluids Optimisation for Efficient Shale Instability Management,” artículo SPE 48875, presentado en la Conferencia y Exhibición Internacional de Petróleo y Gas de China, Beijing, 2 al 6 de noviembre de 1998.
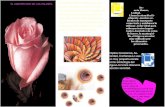
> TD limitada por la ECD. Las pérdidas de presión por fricción, experimentadas a medida que el fluido de perforación fluye entre la sarta de perforación y las paredes del pozo, son un elemento de la ECD (rojo). En los pozos verticales, la ECD se incrementa a un ritmo más lento que el gradiente de fractura (azul). No obstante, en las secciones horizontales (verde), el gradiente de fractura permanece inalterado, en tanto que la ECD se incrementa a medida que aumenta la longitud del pozo. En algún punto del trayecto horizontal del pozo, asumiendo que la densidad del lodo, la tasa de flujo y la reología se mantienen constantes, la ECD excederá al gradiente de fractura, la pérdida de fluido se volverá inmanejable y la perforación tendrá que detenerse.
Rick_ERD_Figure 04
Prof
undi
dad
verti
cal v
erda
dera
Densidad
Límite de la ECD

10 Oilfield Review
Rick_ERD_Figure 05
RUSIA
CHINA
INDONESIA
JAPÓN
Isla de Sakhalin
Localizaciónde las perforaciones al norte
Localizaciónde las perforaciones al sur
Odoptu-More
0 1 2 3 km
0 1 2 millas
NOkha
Yuzhno-Sakhalinsk
Isla deSakhalin
N
, ERD en Sakhalin. Odoptu-More es una acumulación de hidrocarburos de edad Mioceno que yace frente a la costa noreste de la Isla de Sakhalin, en Rusia. A la mayor parte, por no decir a la totalidad, del campo se puede acceder desde localizaciones superficiales en tierra firme (óvalos amarillos) mediante pozos de alcance extendido (líneas negras). El campo Odoptu-More (inserto) se extiende a lo largo de aproximadamente 4 km [2,5 millas], de este a oeste, y 12 km [7,5 millas], de norte a sur, con intervalos productivos a una TVD de aproximadamente 1 500 a 1 700 m [4 900 a 5 600 pies]. Se encuentra ubicado en el extremo norte de un grupo de campos que incluye los campos Chayvo, Piltun y Arkutun-Dagi.
10. Para obtener más información sobre el software de manejo de la perforación, consulte: Ali AHA, Brown T, Delgado R, Lee D, Plumb D, Smirnov N, Marsden R, Prado-Velarde E, Ramsey L, Spooner D, Stone T y Stouffer T: “Observación del cambio de las rocas: modelado mecánico del subsuelo,” Oilfield Review 15, no. 2 (Otoño de 2003): 22–41.
Rick_ERD_Figure 08
300
400
500
600
700
800
900
1 000
1 100
1 200
1 300
1 400
1 500
1 600
1 700
1 800
1 900
2 000
2 100
2 200
2 300
2 400
2 500
2 600
2 700
2 800
2 900
3 000
3 100
3 200
3 300
3 400
3 500
3 600
3 700
3 800
3 900
4 000
4 100
4 200
4 300
4 400
4 500
4 600
4 700
4 800
4 900
5 000
199
299
400
499
600
700
800
899
1 000
1 100
1 200
1 300
1 400
1 500
1 600
Profundidad(m)
MD TVD
Modelo mecánico del subsueloV E N T A N A D E D E N S I D A D E S D E L O D O
L
M
H
I_IV
V
VI_VII
VIII
IX
X
XI
XVIII
XIX1_2
XX1
XX2
XX2_?
XX3
XX1_2
EstratigrafíaAZIM [AZIM] (°)0 200
DEVI [DEVI] (°)0 200
2_S_GRv3 [GR_ARC] (°API)0 150
ρ_lodo_Pérdida de lodo, g/cm30.6 2.6
ρ_lodo_Amago de reventón, g/cm30.6 2.6
ρ_lodo_Ruptura, g/cm30.6 2.6
ρ_lodo_Ovalización, g/cm30.6 2.6
RupturaAmago de reventón
Ángulo de fricción (°)-50 50
Resistencia dela roca (kPa)
0 50 000Presión de poro (kPa)0 50000
Esfuerzo horizontal máximo (kPa)0 50000
Esfuerzo horizontal mínimo (kPa)0 50000
Sobrecarga (kPa)0 50000
Fault
Línea de 1.6 g/cm3
Caverna?
Caverna?
Caver
R6
R2
R7
R1
R8
R9
R3
R4
R5
SeverityLight CatastrophicSeriousMajor
ProbabilityLowMediumHigh
Riesgos de perforaciónCapa
paralela
Ovalizacionespor rupturade la pared
del pozo
Problemasde fracturas
Limpiezaefectiva del
pozo conalta ROP
Otros
R1 600.0 - 2 500.0 570.2 - 1 125.8 Pueden producirse pérdidas de lodo en la formaciónsi la ECD es > 1.65 g/cm3 Detalles: Consecuencias: Desestabilización de lasfracturas, pérdidas, problemas de control del pozoCondicionante: Si es abierto, existen fracturas naturales preexistentes, la ECD alta excede el gradiente de pérdida de lodo
Prevención
Acción de remediación: Detalles: Si se observa invasión de lodo, maniobrar con cuidado a través de las zonas invadidas R2 700.0 - 1 450.0 644.1 - 892.4 Problema secundario de ovalización por ruptura de
la pared del pozo, debido a la ruptura local por cizalladura del pozo si el MW es demasiado bajoDetalles: Consecuencia: Exceso de detritos en el pozoCondicionantes: Densidad del lodo por debajo de 1.2 g/cm3, suaveo excesivo, orientación del pozo/ incremento angular, baja resistencia de la formación
Prevención
Acción de remediación Detalles: Mantener un proceso eficiente de limpieza del pozo, monitorear la DTOR, la ECD y los derrumbes. Aumentar el MW
R3 700.0 - 975.0 644.1 - 783.9 Avalancha de recortes inestables y capas desmoronables con una inclinación de pozo oscilante entre 45 y 70 gradosDetalles: Consecuencia: Atascamiento de la tubería, obturaciones, torque/arrastre erráticos, altos impulsos transitorios de ECD (choque hidráulico), obturación durante los viajes, problemas de entubación, pérdida del pozoCondicionantes: Inclinaciones oscilantes entre 45-70 grados, tamaño del pozo (pozo de 121/4), pozo ensanchado o derrumbes, tasas de flujo demasiado bajas para el tamaño del pozo, prácticas deficientes de limpieza del pozo
Prevención
Acción de remediaciónDetalles: - Utilizar los diagramas de torque y arrastre para monitorear la desviación respecto de la tendencia- Rastrear la tasa de flujo de detritos y comparar con las operaciones de perforación/circulación- Mantener un proceso eficiente de limpieza del pozo y de los equipos rotativos a lo largo de toda la sección en que se produjo la avalancha, en agujero descubierto o en pozo entubado- Utilizar equipos rotativos adecuados para remover los detritos del lado bajo del pozo- Monitorear la ECD por posibles signos de obturación- Asegurar la circulación correcta del pozo antes de la ejecución de conexiones o viajes
R4 975.0 - 3 250.0 783.9 - 1 292.4 Formación de una capa estática de recortes por encima de un pozo de 65 gradosDetalles: Consecuencias: Atascamiento de la tubería,obturaciones, torque/arrastre erráticos, altos impulsos transitorios de ECD (choque hidráulico), pérdida del pozoCondicionantes: Inclinaciones oscilantes por encima de65 grados, tamaño del pozo (pozo de 121/4), pozo ensanchado o derrumbes, tasas de flujo bajas para el tamaño del pozo, prácticas deficientes de limpieza del pozo
Prevención Detalles: Véanse acciones correspondientes al Riesgo 3 Acción de remediación Detalles: Véanse acciones correspondientes al Riesgo 3
R5 1 100.0 - 1 400.0
814.6 - 881.3 Drilling shocks, Stick & Slip, erratic torque and RPM Details: Contributing factors: Hard stringers, hole rugosity, unstable bit design Consequence: Tool failure, drillstring failure (twist-off), sidetrack
Prevention Details: Adjust drilling parameters (WOB, RPM) Remedy Details: Run MWD tools with shock sensors, good communication with driller
R6 1 420.0 - 3 400.0
885.7 - 1 325.8 Wellbore degrades and forms enlarged areas of hole after drilling (caverns, asymmetric breakout) Details: Consequences: Stuck pipe,pack-offs, erratic torque/drag, high ECD transients (hydraulic shock), packoff during trips, trouble running casing, loss of hole Contributing factors: Low mudweight, excessive swabbing, well orientation, mechanical disturbance such as excessive back-reaming, hole open for too long (excessive NPT),
Prevention Details: -If caverns noted on CDNI, avoid rotation while tripping through cavern sections -See also actions as for Risk 3 Remedy Details: - Monitor CDNI during reaming or back-reaming trips to determine if zones are forming -Track the presence of zones on Excel correlation chart - Also actions as for Risk 3
R7 3 290.0 - 5 025.0
1 301.3 - 1 681.9
Breakouts will occur if MW is less than 1.2 sg. Details: Consequence: See Risk 2 Contributing Factors: See Risk 2
Prevention Details: See Risk 2 Remedy Details: See Risk 2
R8 3 290.0 - 4 600.0
1 301.3 - 1 592.4
If open, pre-existing natural fractures exist, mud losses into the formation may occur if ECD is > 1.75 sg Details: Consequences: See Risk 1 Contributing factor: See Risk 1
Prevention Details: Keep ECD below mudloss gradient, monitor fluid losses & time-lapse resistivity fro invasion Remedy Details: -If mud invasion observed careful tripping through invaded zones -Minimise swab and surge effects -Add fluid loss additives
R9 3 620.0 - 4 460.0
1 374.6 - 1 561.3
Si existen fallas conductivas, pueden producirse pérdidas de lodo en la formación si la ECD es > 1.65 g/cm3
Detalles: Consecuencias: Desestabilizaciónde la fallaCondicionante: Alta ECD que excede el gradiente de pérdida de lodo
Prevención
Acción de remediaciónDetalles: Si se observa invasión de lodo, maniobrar con cuidado a través de las zonas invadidas- Minimizar los efectos de las presiones de suaveo y oleada
ID Profundidad del pozo MD TVD Descripción Acciones
Resumen de riesgos
Pronóstico de la estabilidad del pozo - Drillmap
Detalles: -Preparar los materiales de LCM antes de la perforación de la falla prevista entre 3 620-4 460 mMD (1 375-1 560 mTVD)Mantener la ECD por debajo del gradiente de pérdida de lodo, monitorear las pérdidas de fluido y la resistividad obtenida con la técnica de repetición (técnica de lapsos de tiempo) por la posibilidad de invasión
Detalles: - Establecer un procedimiento de circulación seguro si la ECD alcanza un pico- Si se observan síntomas de obturación, conectar y bajar la tubería (RIH) por debajo de la zona empacada, bajar la tubería con torsión mientras se trata de restablecer la circulación- Zafar con golpes del percusor, si es necesario- Después de los pasos previos, conectar y bajar uno o dos tramos de tubería y hacer circular para limpiar el pozo antes de continuar las maniobras
Detalles: Durante los viajes, limitar la perturbación de las zonasdañadas identificadas. Minimizar el funcionamiento cíclico de la bomba
Detalles: Mantener la ECD por debajo del gradiente de pérdida de lodo, monitorear las pérdidas de fluido y la resistividad obtenida con la técnica de repetición (técnica de lapsos detiempo) por la posibilidad de invasión
Ovalización por ruptura de la pared del pozo
FaultF
Caver
Si existen faallas conductivas, pueden producirselpérdidas de lodo en la formación si la ECD es> 1.65 g/cm333
Detalles: Connsecuencias: Desestabilizaciónnde la fallaCondicionante: Alta ECD que excede el gradientede pérdida de lodo
Prevenccióni
, mudis >
PreventionDetails: Keep ECD below mudloss gradient,monitor fluid losses & time-lapse resistivity froinvasionRemedyDetails: -If mud invasion observed careful trippingthrough invaded zones-Minimise swab and surge effects-Add fluid loss additives
If open, pre-existing natural fractures existlosses into the formation may occur if ECD1.75 sgDetails: Consequences: See Risk 1Contributing factor: See Risk 1
sg. PreventionDetails: See Risk 2RemedyDetails: See Risk 2
Breakouts will occur if MW is less than 1.2Details: Consequence: See Risk 2Contributing Factors: See Risk 2
as ofeakout)ffs,
uble
essive
ng, hole
PreventionDetails: -If caverns noted on CDNI, avoid rotationwhile tripping through cavern sections-See also actions as for Risk 3RemedyDetails: - Monitor CDNI during reaming orback-reaming trips to determine if zones areforming-Track the presence of zones on Excel correlationchart- Also actions as for Risk 3
Wellbore degrades and forms enlarged arehole after drilling (caverns, asymmetric breDetails: Consequences: Stuck pipe,pack-oerratic torque/drag, high ECD transients(hydraulic shock), packoff during trips, trorunning casing, loss of holeContributing factors: Low mudweight, exceswabbing, well orientation, mechanicaldisturbance such as excessive back-reamiopen for too long (excessive NPT),
and
rs, hole
re
PrevDetails: Adjust drilling parameters (WOB, RPM)RemedyDetails: Run MWD tools with shock sensors, goodcommunication with driller
Drilling shocks, Stick & Slip, erratic torqueRPMDetails: Contributing factors: Hard stringerugosity, unstable bit designConsequence: Tool failure, drillstring failu(twist-off), sidetrack
e remediaciónAcción deSi se observa invasión de lodo, maniobrar Detalles:
ado a través de las zonas invadidascon cuida- Minimizar los efectos de las presiones de suaveo y oleada
Detalles: -Preparar los materiales de LCM antes de la perforaciónde la fallaa prevista entre 3 620-4 460 mMD (1 375-1 560 mTVD)aManteneer la ECD por debajo del gradiente de pérdida rde lodo, monitorear las pérdidas de fluido y la resistividadmobtenidabt id con la técnica de repetición (técnica de lapsos de a
por la posibilidad de invasióntiempo) por la posibilidad de invasiónl ibilid d d i iópor la posibilidad de invasión
Si existen fallas conductivas, pueden producirse pérdidas de lodo en la formación si la ECD es > 1.65 g/cm3
Detalles: Consecuencias: Desestabilización de la fallaCondicionante: Alta ECD que excede el gradiente de pérdida de lodo
Prevención Detalles: -Preparar los materiales de LCM antes de la perforación de la falla prevista entre 3 620-4 460 mMD (1 375-1 560 mTVD)Mantener la ECD por debajo del gradiente de pérdida de lodo, monitorear las pérdidas de fluido y la resistividad obtenida con la técnica de repetición (técnica de lapsos de tiempo) por la posibilidad de invasión
Acción de remediaciónDetalles: Si se observa invasión de lodo, maniobrar con cuidado a través de las zonas invadidas- Minimizar los efectos de las presiones de suaveo y oleada
> Predicción de la estabilidad del pozo. Los resultados de los estudios del pozo, previos a la perforación, se entregan en formato DrillMAP. La columna 1 indica aquellos intervalos a través de los cuales pueden encontrarse ciertos factores de riesgo, explicados en la columna 2. La columna 2 proporciona además sugerencias en materia de prevención y remediación para cada factor de riesgo (inserto). La ventana de densidad del lodo del Carril 1 indica las densidades de lodo que son insuficientes a una profundidad dada para prevenir la ovalización por ruptura de la pared del pozo (rojo) o un golpe de presión (turquesa). Además, indica la consecuencia prevista de la existencia de densidades de lodo que son demasiado grandes, incluida la pérdida de lodo (púrpura) y su degradación (azul). El perforador necesita mantener la densidad del lodo entre estos límites. El Carril 2 incluye el registro de rayos gamma (verde), la desviación planificada (rosa) y el acimut (azul). El Carril 3 es la comparación entre TVD y MD, basada en la trayectoria planificada del pozo, y el Carril 4 indica las profundidades previstas de localización de cambios estratigráficos. El Carril 5 corresponde al modelo mecánico del subsuelo (MEM) e incluye la resistencia a la compresión no confinada de la roca (UCS) (marrón) y el ángulo de fricción (FANG) (negro). Ambos constituyen datos de entrada para el criterio de falla de Mohr-Coulomb, utilizado para describir una relación lineal entre el esfuerzo normal y el esfuerzo de corte (máximo y mínimo) en presencia de falla. La sobrecarga modelada (marrón), el esfuerzo horizontal mínimo (rojo), el esfuerzo horizontal máximo (verde) y la presión de poro (azul) se incluyen como parte del MEM.

Volumen 22, no. 3 11
de lodo y procedimientos operacionales para minimizar la degradación del pozo (página ante-rior, arriba).10
Rosneft SMNG (Sakhalinmorneftegaz) estaba experimentando problemas de estabilidad en los
pozos de alcance extendido que accedían a la por-ción norte de la estructura de Odoptu-More, frente a la costa de la Isla de Sakhalin, en Rusia (página anterior, abajo). El campo fue desarrollado perfo-rando pozos de alcance extendido desde 1998.
En el año 2003, el operador dejó de perforar con motores de desplazamiento positivo para uti-lizar sistemas de perforación rotativa direccional (RSS). Para el año 2006, se habían perforado y terminado 21 pozos de alcance extendido con relaciones HD/TVD de hasta 4,1.
La introducción de los sistemas RSS produjo un mejoramiento sustancial en la ROP. No obs-tante, su uso fue acompañado por el incremento del tiempo no productivo (NPT) generado por problemas de limpieza del pozo, asociados con las operaciones de rectificación a través de cier-tas zonas de la sección del pozo de 121/4 pulgadas. Estos problemas se manifestaron como un exceso de torque y arrastre, picos de ECD, obturaciones y atascamiento de la tubería.
El empleo de asistencia mecánica —tal como las operaciones de rectificación— en pozos de diá-metro grande es práctica estándar cuando las capa-cidades de velocidad de bombeo y tasa de flujo del equipo de perforación son limitadas. La no utiliza-ción del proceso de rectificación en estas condicio-nes se traduce normalmente en operaciones ineficientes de limpieza del pozo y dificultades sub-siguientes con su entubación. No obstante, en el caso de Odoptu-More, estas complicaciones surgie-ron por el volumen excesivo de retornos no tritura-dos, consistentes en detritos de fangolita dura, que fueron inducidos durante las operaciones de rectifi-cación (izquierda. extremo superior). A partir del análisis de múltiples pasos de datos, derivados de mediciones obtenidas durante la rectificación en tiempo real, finalmente se observó que la fuente de los detritos estaban localizadas en las zonas rugosas del pozo (izquierda. extremo inferior).
En respuesta, el operador y los ingenieros de Schlumberger desarrollaron un modelo mecánico del subsuelo (MEM), basado en la profundidad, especí-fico para cada pozo perforado. El equipo de trabajo modificó el programa de entubación para aislar en forma más efectiva las zonas inestables clave. A fin de complementar estos cambios, los profe-sionales diseñaron además una estrategia perso-nalizada de manejo de riesgos, basada en la comprensión de las causas raíces del NPT en pozos previos. Esta estrategia abordó de manera integral la formación de rugosidad localizada, resultante de las maniobras y las operaciones de rectificación. Además, demostró su efectividad en la limitación de la generación y la expansión aso-ciada de los detritos provenientes de estas zonas.
Luego, los ingenieros utilizaron la herra-mienta de planeación y manejo de la perforación DrillMAP para implementar una estrategia basada en métodos similares, utilizados en el Mar del Norte, el Golfo de México y América del Sur.
> Detritos del pozo debidos a la inestabilidad. Una revisión de los registros de perforación, realizada durante una investigación de un pozo del campo Odoptu-More, indicó que la mayor parte del tiempo problemático relacionado con el NPT se confinaba a rangos de profundidad relativamente cortos. Al intensificarse los problemas de limpieza del pozo, en estas áreas localizadas se recuperaron varios metros cúbicos de excedentes de retornos; fangolita dura con una estructura de grano fino, de 6 cm [2.4 pulgadas] de diámetro y 2 cm [0.8 pulgada] de altura, como la que se muestra en esta foto. La morfología de estos retornos no indicó la existencia de un mecanismo clásico de falla por corte, asociado por lo general con una densidad de lodo insuficiente. Dada su naturaleza localizada en el pozo y la capacidad para correlacionar estas zonas a través de una porción del campo, los ingenieros teorizan que el mecanismo probable de falla se relaciona con la anisotropía de la roca en sí. (Adaptado de Mohammed et al, referencia 11.)
Rick_ERD_Figure 06
> Evidencia directa de lapsos de tiempo. En un pozo problemático clave, la presencia de zonas rugosas localizadas, o cavernas, pudo inferirse directamente a partir de las anomalías de inclinación y acimut observadas en los datos del levantamiento de alta resolución y múltiples pasos, del pozo de 121/4 pulgadas. Estos datos continuos de desviación e inclinación (CDNI) fueron obtenidos con las herramientas MWD corridas a través de las secciones del pozo perforadas previamente. Los múltiples pasos de los datos CDNI se superponen para obtener las contracurvas y localizan claramente los defectos de alineación producidos por las excursiones de la herramienta de prospección, que alcanzan hasta 1.5° respecto del eje del pozo perforado. (Adaptado de Mohammed et al, referencia 11.)
Incl
inac
ión
y ac
imut
, gra
dos
Profundidad a lo largo del pozo, m
Rick_ERD_Figure 07
86
84
85
82
83
81
79
80
77
78
75
76
743 1003 000 3 010 3 020 3 030 3 040 3 050 3 060 3 070 3 080 3 090
Acimut de la perforaciónAcimut de la rectificación 1Acimut de la rectificación 2
Inclinación de la perforación Inclinación de la rectificación 1Inclinación de la rectificación 2
La herramienta de prospección sale de la caverna, en dirección ascendente y hacia la derecha
La herramienta de prospección ingresa en la caverna, en dirección descendente y hacia la izquierda

12 Oilfield Review
Este plan clasifica los riesgos medidos de perfo-ración, referenciados a la profundidad, y especi-fica las medidas de control y contingencia a adoptar en función del MEM. Para cada pozo se crea una nueva versión de este protocolo y un nuevo MEM. Por otro lado, los ingenieros agrega-ron una función técnica de soporte para la toma de decisiones en tiempo real en el equipo de perfora-ción, para implementar la estrategia de manejo de riesgos.11 Conforme continúan las actividades de desarrollo en la estructura Odoptu-More, se utili-zan datos continuos de dirección e inclinación (CDNI) para proporcionar una advertencia antici-pada de la presencia de cavidades, y su condición y localización precisas se utilizan para determinar el diseño de la tubería de revestimiento.
Empuje, tracción y torsiónA la hora de planificar un pozo de alcance exten-dido, los ingenieros deben considerar también la física de la longitud del pozo. En los pozos vertica-les, el torque, el arrastre y la flexión se ignoran en esencia y se asume que la tubería se encuentra ubicada en el centro del pozo. Las cargas genera-das por estos eventos pueden volverse tan grandes que la cabeza rotativa superior del equipo de per-foración no puede rotar la tubería, y el malacate no puede subirla o bajarla. También puede suceder que las cargas sean suficientemente grandes de manera que, en caso de que la tubería se atasque, los esfuerzos realizados para liberarla produzcan su rotura, obligando al operador a abandonar el pozo, declarar la profundidad total (TD) prematu-ramente o perforar un pozo de re-entrada.
En los pozos de alcance extendido, la fricción juega un rol más significativo que en los pozos verti-cales. Esto se debe a que la columna de perforación y la tubería de revestimiento son forzadas contra los lados del pozo de alcance extendido (derecha).
La existencia y la magnitud del torque mecá-nico (tal como el torque en la barrena y el torque fuera del fondo producido por fricción) y del arras-tre son una función de diversos factores clave:•tensiónycompresiónenlasartadeperforación•severidad de la pata de perro; tasa de incre-
mento o reducción angular o cambio de acimut•tamañodelpozoydelatubería•pesodelasartadeperforación•inclinación•lubricidad;elefectodelosreductoresdefric-
ción en el fluido de perforación.El torque mecánico se genera cuando la sarta
de perforación experimenta un fenómeno de atascamiento diferencial o interactúa con capas de recortes o formaciones inestables.12 La ejecu-ción de la selección de la barrena al comienzo del proceso de planeación del pozo ayuda a evitar el
torque en la barrena, el cual es generado por su interacción con la formación. El torque fuera del fondo, como indica el término, ocurre cuando se rota la sarta de perforación mientas se levanta por encima del fondo del pozo. Esto elimina el elemento de torque en la barrena de la medición. El arrastre es una fuerza axial, afectada por los mismos factores que el torque, y se produce cuando la tubería es desplazada hacia arriba o hacia abajo en el pozo.
Si bien todos los pozos pueden experimentar atascamiento diferencial, los pozos de alcance extendido son particularmente susceptibles a este fenómeno y la recuperación, luego de experi-mentarlo, es más difícil que en los pozos conven-cionales. La solución para el problema de inestabilidad de pozos de alto ángulo a menudo consiste en incrementar la densidad del lodo. Esto hace que se perfore en condiciones de sobre-balance, lo que constituye la causa principal del atascamiento de la tubería. Además, en compara-ción con los pozos verticales, los pozos de alcance extendido habitualmente dejan secciones de yaci-
miento más largas expuestas durante períodos más largos, con la sarta de perforación y el arreglo de fondo de pozo (BHA) sepultados en los recor-tes, en el lado bajo del pozo. Esto puede generar una condición de obturación que produce el atas-camiento de la tubería.
Dado que el fenómeno de atascamiento dife-rencial puede incrementar considerablemente la fricción general, es posible que intensifique los problemas secundarios de torque, arrastre o flexión. Cuando el atascamiento diferencial tiene
> Torque y arrastre. El torque es una medida de la resistencia a la rotación, causada por la fricción entre la tubería de revestimiento o la sarta de perforación y la pared del pozo. El arrastre es una medida de la resistencia al movimiento ascendente o descendente. La magnitud del torque y del arrastre, observada en el tubular, es una función de la tensión o la compresión y del área en contacto con el pozo. Cuando los tubulares están centrados correctamente en un pozo vertical, el contacto con la pared del pozo es insignificante, y el torque y el arrastre son esencialmente nulos (izquierda). Durante una sección de incremento angular, la columna de perforación o la tubería de revestimiento experimenta grados variables de torque y arrastre porque es presionada contra el lado superior de la pared del pozo y se encuentra en estado de compresión o tensión (centro). En la sección tangencial del pozo, los tubulares se encuentran en pleno contacto con la parte inferior del pozo y en cierto estado de compresión o tensión (derecha). La magnitud del torque y el arrastre, creados a lo largo de esta sección del pozo, es básicamente una función del peso de la tubería de revestimiento. La flexión se produce cuando las fuerzas de compresión resultantes del arrastre pliegan la tubería contra la pared del pozo, generando una configuración sinusoidal (inserto, extremo superior). Con el tiempo, si las cargas continúan creciendo, la tubería se curvará helicoidalmente (inserto, extremo inferior), y en ese momento el movimiento descendente se detendrá.
Rick_ERD_Figure 09
Tensióny compresión
de la sarta
Rotación
Tensión ycompresiónde la sarta
Peso de la tubería
Rotación
Fuerza de contacto
TorqueArrastre axial
Tensión y compresión de la sarta
TorqueArrastre axial
Fuerza de contacto
Rotación

Volumen 22, no. 3 13
lugar en un pozo de alcance extendido, la capaci-dad del perforador para liberar la tubería se reduce por el alto ángulo del pozo, lo que limita la cantidad de peso o tensión que se transmite al BHA. Habitualmente, en un pozo convencional, la tubería puede considerarse atascada en forma permanente si con 667 000 N (150 000 lbf) de sobretracción no puede ser movida. En un pozo de alcance extendido, la incapacidad para transmitir peso o tensión puede llevar ese valor a 89 000 N (20 000 lbf).13 El problema se intensifica en pre-sencia de grandes fuerzas de arrastre, ya que puede resultar imposible ejercer una fuerza ascendente suficiente como para emplazar y acti-var los percusores de perforación.14
Dado que los pozos de alcance extendido son tan susceptibles a los efectos de la fricción, los ingenie-ros de planeación deben simular todas las operacio-nes importantes para garantizar su factibilidad y el hecho de que las cargas se encuentren dentro de límites aceptables. Esto requiere el empleo de pro-gramas de modelado del torque y el arrastre.
Los modelos de torque y arrastre utilizan un factor de fricción adimensional que da cuenta de una serie de elementos que impactan el movi-miento de la tubería, a saber:•lalubricidaddelsistemadelodo•larigidezdelatubería•lascapasderecortes•lainteracciónentreelestabilizadoryelcentralizador
•elatascamientodiferencial•losefectosdepistónhidráulico•lashendiduras(canaletas).
Con la rigidez de la tubería se intenta dar cuenta de los esfuerzos laterales adicionales ejer-cidos sobre la tubería, en lugar de un modelo de “tubería blanda,” que asume que el tubular se ade-cua al perfil del pozo. Los estabilizadores y los cen-tralizadores son dispositivos mecánicos, fijados a la sarta de perforación o a la tubería de revesti-miento, para mantenerlos en el centro del pozo. Los efectos de tipo pistón hidráulico son causados por el desplazamiento de la tubería a través de los fluidos presentes en el pozo, de forma que se crean golpes de presión. Las hendiduras (canaletas) se producen cuando la columna de perforación genera un canal angosto en uno de los lados del pozo, en una sección de incremento angular, de reducción angular o de cambio de dirección. El
BHA de mayor diámetro no puede ser retrotraído a través de este canal angosto y, cuando los operado-res pretenden desplazar la sarta de perforación hacia la superficie, éste se asienta.
Las variaciones pequeñas, producidas en los factores de fricción, pueden incidir significativa-mente en los cálculos del torque y el arrastre. Los cambios introducidos en parámetros tales como la densidad del lodo, el trayecto del pozo, la selección de la profundidad de entubación y el diseño de la sarta de perforación o de la tubería de revestimiento, pueden causar estas variacio-nes durante la perforación. Por consiguiente, es crucial que durante la planeación de un pozo de alcance extendido, se considere una gama ade-cuada de factores de fricción. Los ingenieros uti-lizan los análisis de riesgos de torque y arrastre para determinar los resultados posibles cuando el factor de fricción varía (arriba).
11. Mohammed N, Chernov M, Manalac-Trøn E y Kaydalov Y: “Focused Risk-Management Brings a Step-Change Improvement in Drilling Performance at Sakhalin’s Odoptu ERD Development,” artículo SPE 102818, presentado en la Conferencia y Exhibición Técnica del Petróleo y el Gas de Rusia de la SPE, Moscú, 3 al 6 de octubre de 2006.
12. El atascamiento diferencial se produce cuando la sarta de perforación no puede ser movida (rotada o invertida), a lo largo del eje del pozo. El atascamiento diferencial tiene lugar habitualmente cuando se ejercen fuerzas de contacto altas, causadas por las presiones bajas del yacimiento, las presiones altas del yacimiento, o ambas, sobre un área suficientemente grande de la sarta de perforación. La fuerza de atascamiento es un producto de la presión diferencial, existente entre el pozo y el yacimiento, por el área sobre la que actúa esa presión diferencial. Esto significa que una presión diferencial relativamente baja, aplicada sobre un área de trabajo grande, puede ser tan efectiva para el atascamiento de la tubería como una presión diferencial alta aplicada sobre un área pequeña.
13. Mims and Krepp, referencia 4.14. Los percusores (tijeras) de perforación son dispositivos
mecánicos utilizados en el fondo del pozo para liberar la tubería atascada, a través de la transmisión de una carga de impacto a otro componente del fondo del pozo. El perforador emplaza y activa los percusores de perforación, tirando lentamente de la sarta de perforación mientras el arreglo BHA queda atascado en su lugar. Dado que la parte superior de la sarta de perforación se desplaza hacia arriba, se estira y almacena energía. Cuando los percusores alcanzan su punto de activación, una sección del percusor se desplaza súbitamente en sentido axial respecto de una segunda sección, y los percusores suben rápidamente de manera similar al movimiento del extremo de un resorte estirado cuando se lo suelta. Esta sección en movimiento golpea en un resalto de acero, impartiendo una carga de impacto.
> Análisis del riesgo de arrastre. Las variaciones secundarias de los factores de fricción pueden tener un impacto significativo sobre el torque y el arrastre en los pozos de alcance extendido. Durante la etapa de planeación, es esencial que se analicen los factores de fricción para determinar la sensibilidad a las variaciones en la densidad del lodo, el trayecto del pozo, los perfiles del pozo o la configuración de la sarta de perforación. Este ejemplo corresponde a una tubería de revestimiento flotante de 95/8 pulgadas, corrida en un pozo con un factor de fricción previsto de 0.50 en agujero descubierto. La tensión superficial al bajar la herramienta (slackoff) es equivalente a la lectura esperada de un indicador de peso ubicado en la superficie, a medida que la tubería de revestimiento se baja en el pozo. Las curvas rojas representan diversos factores de fricción, que oscilan entre 0.30 y 0.70. En este caso, si el factor de fricción es sólo levemente mayor que 0.50, el peso de la tubería de revestimiento se volverá negativo, lo que significa que la combinación de la fricción con la flotabilidad de la tubería de revestimiento en los fluidos del pozo será mayor que el peso de la tubería de revestimiento. Esto impedirá que la tubería de revestimiento llegue al fondo. La de la tubería de revestimiento flotante es una técnica en la que el fluido de perforación es reemplazado por aire en aquella parte de la tubería de revestimiento que corresponde a la sección tangencial. Esto incrementa la flotabilidad de la tubería de revestimiento, lo que reduce el torque y el arrastre mediante la reducción de la fuerza de contacto entre ésta y la pared del pozo. Si bien esto elimina la opción de circular, puede aligerar la tubería de revestimiento suficientemente como para que sea rotada, lo que hace posible contrarrestar los efectos del torque y el arrastre.
Prof
undi
dad,
m
Tensión superficial al bajar la herramienta, 1 000 lbf
0
500
1 000
1 500
2 000
2 500
3 000
3 500
4 000
4 500
5 000
5 500
6 000
6 500
7 000
7 500
8 000
Rick_ERD_Figure 10
8 500160140120100806040200–20–40–60–80–100
0,70 0,60 0,50 0,40 0,30
Sección de pozo entubado

14 Oilfield Review
Prof
undi
dad
med
ida,
pie
s
Torque fuera del fondo, 1 000 pies.lbf
0
5 000
10 000
15 000
20 000
Torque fuera de fondo y torque de perforación, medidos
Cargas ECD y tamaño promedio del pozo
25 000
30 000
35 000
40 000
Rick_ERD_Figure 11
45 0000 5 10 15 20 25 30 35 40 45
Prof
undi
dad
med
ida,
pie
s
ECD, lbm/galón estadounidense
0
5 000
10 000
15 000
20 000
25 000
30 000
35 000
40 000
45 0009 10 11 12 13 14 15 16 17 18 19 20
Torque fuera de fondo medidoTorque de perforación medidoLímite del equipo de superficie
Tamaño del agujero descubierto: 8,5 pulgadasTamaño del agujero descubierto: 9,0 pulgadasTamaño del agujero descubierto: 9,5 pulgadasDensidad medida del lodoECD calculada por MOQ450 psi por encima de la presión de poroen el talón
, Eliminación del factor limitante. A partir de una revisión del campo Al-Shaheen, MOQ dedujo que la longitud de las secciones horizontales en el campo estaba limitada por la capacidad de torque de las conexiones de la columna de perforación y las cargas ECD, más que por la capacidad de la cabeza rotativa superior o del equipo de perforación (extremo superior). Para establecer su longitud récord en el pozo BD-04A, el operador utilizó una columna de perforación de 5 pulgadas con conexiones de alto torque. A 23 600 pies, se agregó una sección de columna de perforación de 4 pulgadas por encima del BHA. Luego, a 28 000 pies, el aditivo lubricante del lodo de perforación se incrementó de 2% a 3%. Como resultado, el torque de perforación se redujo, pasando de un promedio proyectado (no mostrado) de 26 000 pies.lbf [35 000 N.m] a un promedio medido, oscilante entre 14 000 y 21 000 pies.lbf [19 000 y 28 000 N.m]. Los factores de fricción de 0.20-0,24 se redujeron a 0,18-0,21. Al mismo tiempo, el incremento del área de flujo creada por la sección de la columna de perforación de diámetro más reducido por encima del BHA redujo la ECD, de 15,2 a 14,3 lbm/galón estadounidense [1 797 a 1 714 kg/m3] (extremo inferior). (Adaptado de Sonowal et al, referencia 2.)
La flexión también puede convertirse en un desafío significativo durante la perforación de pozos de alcance extendido. Este fenómeno poco conocido es el resultado del arrastre acumulado que aplica fuerzas de compresión sobre la sarta de perforación o la tubería de revestimiento y pro-voca un cambio de comportamiento en la sarta. La flexión también se produce en el BHA, pero espe-cialmente desde la aparición de los sistemas RSS, la capacidad para manejarlo ha mejorado.
Como sucede con todos los problemas de los pozos de ERD, la posibilidad de que se produzca el fenómeno de flexión debe ser considerada durante la planeación del pozo. A la hora de seleccionar los tubulares, planificar las tasas de giro e incremento angular, y diseñar los espacios anulares en las sec-ciones inferiores del pozo, los ingenieros deben estar particularmente al tanto de la posibilidad de que se registre el fenómeno de flexión.
Otras de las medidas proactivas para ayudar a evitar el fenómeno de flexión implica mantener la sarta de perforación rígida, evitando al mismo tiempo el agregado de peso que puede exacerbar los problemas de torque y arrastre. Dado que la rigidez de la tubería es una función de su radio, en los pozos de alcance extendido se ha utilizado una columna de perforación de diámetro más grande para combatir la flexión. No obstante, es importante considerar el impacto de las pérdidas de presión por fricción resultantes sobre la ECD.

Volumen 22, no. 3 15
torque y el arrastre indicó que las cargas en la nueva TD excederían las capacidades de la cabeza rotativa superior y de la sarta de perfora-ción. Al mismo tiempo, las ECD serían inacepta-blemente altas con la columna de perforación existente de 5 pulgadas y las propiedades tradi-cionales del lodo.
El modelado indicó que estas ECD y estos esfuer-zos de torsión podrían alcanzar niveles acepta-bles, si se utilizaba una sarta de perforación cónica (tapered) de 4 por 5 pulgadas. El modelo determinó además que una sarta cónica generaría una presión de bombeo más alta y reduciría la tasa de flujo en la TD, y que la longitud de la sección de 4 pulgadas era el factor de limitación en el equilibrio del conflicto. El diseño final, que concilió los esfuerzos de torsión y arrastre, los componentes hidráulicos y los mode-los de ECD, incluyó 2 133 m [7 000 pies] de columna de perforación de 4 pulgadas y 4 572 m [15 000 pies] de columna de perforación de 5 pulgadas con conexiones de alto torque agregadas a la parte supe-rior de la sarta de perforación (página anterior).
La sección del pozo de 81/2 pulgadas fue perforada en dos carreras. En la primera se utilizó un sistema RSS de tipo empuje de la barrena PowerDrive X5 para alcanzar 10 326 m [33 877 pies], con un pro-ceso de monitoreo del torque de perforación, que indicó un factor de fricción oscilante entre 0.18 y 0.21. Durante esa primera carrera, los niveles del aditivo lubricante se incrementaron de 2% a 3% para reducir el torque y la severidad del atasca-miento/deslizamiento y, por consiguiente, las vibraciones, lo que permitió al perforador mante-ner la ROP sin dañar el BHA. El torque de perfo-ración alcanzó su punto máximo en el límite de la cabeza rotativa superior de 36 000-39 000 pies.lbf [49 000-53 000 N.m]. Luego, el operador levantó la columna de perforación de 4 pulgadas para reducir el torque y las cargas ECD.
La segunda carrera —que se realizó con una sarta de perforación cónica de 4 por 5 pulgadas— de inmediato generó un grado suficiente de tor-que y mejoras de la ECD para permitir perforar hasta una TD final de 12 290 m [40 320 pies] de MD. Esto incluyó un giro acimutal de 35°. Además, se utilizó un sistema RSS de tipo direc-cionamiento de la barrena PowerDrive Xceed porque requiere menor caída de presión a lo largo de la herramienta que el diseño del sistema de empuje de la barrena. También se incluyó en el cálculo un área de flujo más grande del sistema barrena-boquilla para mejorar la presión de bom-beo y la tasa de flujo en la barrena.
El operador logró esta longitud récord, con el énfasis puesto en el manejo de la ECD y la adopción
15. Sonowal et al, referencia 2. La desviación a lo largo del pozo es la distancia
horizontal medida, desde la superficie hasta el fondo del pozo, si se eliminan los cambios de acimut y se desenrolla el pozo.
Además, existen otras medidas disponibles, tales como herramientas especiales de fondo de pozo que reducen los esfuerzos de torsión y arrastre o que facilitan más la transferencia de la carga.
Una solución modeloEl Bloque 5 del campo Al-Shaheen, situado en el área marina de Qatar, se caracteriza por la baja productividad de sus pozos verticales, y su desa-rrollo con pozos convencionales requeriría un gran número de plataformas. Por otro lado, las reservas hidrocarburíferas del campo son areal-mente extensivas. Estos factores lo convierten en un prospecto particularmente adecuado para una estrategia de ERD, pero el operador, Maersk Oil Qatar AS (MOQ), debía superar primero los pro-blemas de torque y ECD que amenazaban con limitar las longitudes del alcance horizontal.
MOQ apuntó como objetivos a las formaciones carbonatadas Kharaib B y Shuaiba, de edad Cretácico Inferior, y a la formación de areniscas Nahr Umr. La formación Kharaib B corresponde a una capa carbo-natada lateralmente uniforme, de aproximada-mente 24 m [80 pies] de espesor, con un objetivo prospectivo de 8 m [25 pies] de espesor. La forma-ción Shuaiba exhibe cambios de facies laterales y contrastes de permeabilidad y posee un espesor de aproximadamente 60 m [200 pies] con un objetivo prospectivo de unos 6 m [20 pies] de espesor. La formación Nahr Umr corresponde a una secuencia de areniscas de 20 pies de espesor con objetivos prospectivos compuestos por areniscas de un espe-sor permeable de 1.5 m [5 pies] o menor.
En 1994, el operador perforó una sección hori-zontal de 3,1 km [1,9 milla], que batió récords, uti-lizando motores de desplazamiento positivo y estabilizadores de calibre ajustable. Mediante la adopción de nueva tecnología no bien estuvo dis-ponible, la compañía mejoró ese logro. En mayo de 2008, MOQ terminó una sección horizontal récord de 10,9 km [6,8 millas], con una profundi-dad medida de 12,3 km [7,6 millas], que en ese momento fue la desviación a lo largo del pozo de mayor longitud del mundo: 11,6 km [37 956 pies o 7,2 millas].15
La profundidad medida original del pozo iba a ser de 8,8 km [5,5 millas], pero el operador optó por extenderla para evaluar el flanco oriental e incrementar la exposición del yacimiento, utili-zando un solo pozo. No obstante, el modelado del
de medidas para controlar el factor de fricción durante la fase de planeación del pozo. Las simula-ciones indicaron que si las tasas de pérdida de circu-lación inducidas por la ECD se mantenían en niveles aceptables, el pozo podría haber sido perforado hasta aproximadamente 13 400 m [44 000 pies], punto en el cual habría alcanzado el límite de tor-que de la cabeza rotativa superior.
Perforación en cursoOriginalmente, la construcción de pozos horizon-tales largos era una decisión económica; se lograba más zona productiva expuesta por el costo de un pozo o bien se explotaban numerosas formaciones por el costo de una sola localización de superficie. Al actuar como túneles de disparos de gran diáme-tro y penetración profunda, los pozos horizontales también constituyen una respuesta para el desafío de lograr tasas de flujo económicas desde forma-ciones compactas y de escaso espesor.
Pero, dado que la industria ha aprendido a perforar pozos más allá de los límites alguna vez impuestos por el torque, el arrastre, la ECD y las capacidades del equipo de perforación, la perfo-ración de pozos ERD se ha vuelto atractiva por motivos ajenos a los aspectos económicos. Como quedó demostrado en el campo Wytch Farm de Inglaterra, los pozos horizontales de gran longi-tud constituyen además alternativas ambiental-mente aceptables. Las formaciones a las que esos pozos apuntan como objetivos se encuentran debajo del área ecológicamente sensible de Poole Harbour. Mediante el emplazamiento de las loca-lizaciones de superficie en tierra firme a cierta distancia de la línea de costa y la ejecución de las operaciones de perforación muy por debajo del piso del puerto, el curso de agua y sus adyacencias inme-diatas permanecieron aislados de la actividad del operador. Esta elección de perforación permitió que el área permaneciera visualmente atractiva y redujo la amenaza de contaminación ecológica.
Hoy, el mundo se encuentra ante un dilema. Los seres humanos han tomado conciencia de la fragilidad del medio ambiente y a la vez esa globa-lización ha elevado el estándar de vida de millones de personas. Pero el precio de esa prosperidad es la generación de una demanda insaciable de com-bustibles a base de hidrocarburos, lo que exige más perforaciones. La aplicación de prácticas de ERD para acceder a más depósitos, a la vez que se perforan menos pozos desde un número menor de localizaciones de superficie, es una medida que está utilizando la industria del sector petrolero de exploración y producción para ayudar a conciliar estas realidades en conflicto. —RvF

16 Oilfield Review
Robots al rescate
Otrora tema de ciencia ficción, los robots evolucionaron para convertirse en una
rama especializada de la ingeniería y la tecnología. Estas máquinas se encuentran
en una diversidad de aplicaciones, que abarcan desde la exploración del espacio
hasta la ayuda doméstica. Al liberar a la humanidad de peligros y tareas tediosas,
los robots están haciendo que lo improbable se torne posible.
Geoff DowntonStonehouse, Inglaterra
Steve GómezSugar Land, Texas, EUA
Mark HaciEric MaidlaHouston, Texas
Charles RoyceOceaneering International, Inc.Houston, Texas
Traducción del artículo publicado en Oilfield Review, Otoño de 2010: 22, no. 3.Copyright © 2011 Schlumberger. Por su colaboración en la preparación de este artículo, se agradece a Michael Tempel, Cambridge, Massachusetts, EUA; Charlie Vaida, iRobot Corporation, Bedford, Massachusetts; y a Summer Wood, Oceaneering International, Inc., Houston.SLIDER es una marca de Schlumberger.AESOP y da Vinci son marcas de Intuitive Surgical, Inc. Aware 2, Genghis, iRobot, PackBot y Roomba son marcas de iRobot Corporation.Google es una marca de Google, Inc.
Al revelarse la tragedia de la plataforma Deepwater Horizon, millones de personas per-manecieron paralizadas frente a sus videos y tele-visores, observando las transmisiones en vivo realizadas desde vehículos operados en forma remota (teledirigidos) (ROV), ubicados en el fondo del océano. Más allá de las capacidades humanas —a profundidades de agua mayores que las correspondientes al rango de los submari-nos inhabitables— estos héroes robóticos ejecu-taron tareas increíblemente intrincadas.
No obstante, la robótica abarca mucho más que las operaciones oceánicas remotas. En la sociedad moderna, los robots ejecutan una diver-sidad de funciones, liberando a los seres huma-nos de tareas repetitivas y cotidianas, por un lado, a la vez que realizan trabajos peligrosos que trascienden las capacidades humanas, por el otro. Los robots industriales se utilizan en una amplia gama de roles, principalmente en las fábricas. Los robots de servicio operan en los qui-rófanos de los hospitales, en los campos de bata-lla, en el espacio exterior y en los hogares, y también en los campos petroleros. Este artículo ofrece un relato del campo de la robótica y pre-senta alguna de sus diversas aplicaciones.
Máquinas amenazantesEn la Inglaterra de comienzos de la década de 1800, la Revolución Industrial produjo cambios profundos que modificaron el paisaje fabril. Uno de los subproductos de los cambios producidos en los métodos de manufactura fue el desplaza-miento de los trabajadores manuales tradiciona-les. En la industria textil, este fenómeno resultó especialmente pronunciado ya que grandes números de trabajadores no calificados fueron reemplazados por telares automatizados.
Lamentablemente, estos trabajadores conta-ban con pocas alternativas laborales y, en un estado de desesperación, un grupo se amotinó y atacó al presunto enemigo: el telar mecanizado. Este movimiento extrajo su nombre del joven Ned Ludd quien, si bien no formó parte de esta revuelta, en un arrebato de ira había destrozado los bastidores 30 años antes. Las acciones de los ludistas o luditas tuvieron una vida corta —ya que fueron reprimidas rápidamente por la inter-vención militar— pero se estableció un odio pro-fundo entre el hombre y la máquina. El concepto de robots y robótica se desarrolló en el contexto de esta relación confrontada.
La palabra robot apareció por primera vez en una obra de ciencia ficción de 1921, R.U.R. (Robots Universales de Rossum), del dramaturgo checo Karel Capek. Proveniente del vocablo eslavo “rabota,” que significa servidumbre, y “robota,” que significa trabajo forzado o tedioso, el término robot se refiere a un trabajador aplicado. Los robots de Capek fueron relegados a tareas domésticas, libe-rando a la humanidad del trabajo tedioso y del hastío. Pero, al final, los robots se rebelaron y se convirtieron en opresores de los hombres. A partir de esta aparición inoportuna, surgió un género literario en el que los robots eran caracterizados frecuentemente como enemigos más que como asistentes, que reflejaban quizás los temores de los anteriores ludistas.
Aproximadamente 20 años después, Isaac Asimov, uno de los primeros maestros de la cien-cia ficción, introdujo el concepto de ética robó-tica con sus Tres Leyes de la Robótica.1 Ésta se reconoce en general como la primera vez en que se utilizó el término robótica, que ahora se ha convertido en una rama aceptada de la ciencia y la ingeniería. En las novelas de Asimov, los robots

Volumen 22, no. 3 17
antropomórficos sensibles eran casi humanos pero carecían de emociones. Estos robots difie-ren considerablemente de las máquinas robóti-cas de la sociedad moderna que, aunque siguen careciendo de emociones, han abandonado las páginas de las obras de ciencia ficción para intro-ducirse en fábricas, granjas, campos petroleros, hogares y una diversidad de otros ambientes.
De la ficción a la industriaNo existe consenso absoluto acerca de lo que constituye un robot. Según la mayoría de las defi-niciones, se trata de una máquina guiada por con-troles automáticos que a menudo reemplaza el esfuerzo humano. Con este concepto en mente, surgió un candidato probable para el primer robot —como sucede con muchos inventos— por necesidad, si bien es difícil conferir el título de primero cuando las definiciones son un tanto borrosas y existen intereses encontrados en rela-ción con dicho título.
A comienzos de la década de 1940, durante el Proyecto Manhattan, era imposible manipular en forma directa los materiales radioactivos objeto de estudio. Los científicos desarrollaron un tele-manipulador que permitía que los operadores ejecutaran tareas rudimentarias en forma remota y con una relativa seguridad.2 Si bien el disposi-tivo podría atribuirse el carácter de primero, pues fue parte del proyecto ultra secreto de desa-rrollo de la primera bomba atómica, no estaba al alcance del público general y era desconocido para éste.
Hoy en día, el rol de la telerrobótica en la indus-tria nuclear se encuentra bien consolidado; las máquinas robóticas manejan cada una de las par-tes del ciclo de vida del combustible. Esto incluye el transporte, el almacenamiento, el aprovisiona-miento de combustible y la recuperación de las varillas de combustible y, por último, el desman-telamiento. Las centrales nucleares cuentan con robots para una segunda línea de defensa, dise-
ñada para desmantelar y remover los robots de la primera línea en caso de que queden atascados en el reactor.
El primer dispositivo robótico comercial gene-ralmente reconocido fue un invento de George Devol y Joseph Engelberger, quienes en el año 1956 ofrecieron a la venta el manipulador Unimate; definido por el Instituto de Robótica de América como un manipulador industrial. Unimate era un brazo hidráulico controlado electrónicamente para la ejecución de tareas preprogramadas, que fue vendido en primer término a General Motors y
1. Las Tres Leyes de la Robótica de Asimov son las siguientes:
Un robot no puede dañar a un ser humano o, por su inacción, dejar que un ser humano sufra daño.
Un robot debe obedecer las órdenes que le son dadas por un ser humano, excepto si estas órdenes entran en conflicto con la Primera Ley.
Un robot debe proteger su propia existencia mientras dicha protección no entre en conflicto con la Primera o la Segunda Ley.
2. Murphy RR: Introduction to AI Robotics. Cambridge, Massachusetts, EUA: The MIT Press, 2000. Fotografía utilizada con la autorización de Oceaneering International, Inc.
Fotografía utilizada con autorización de Oceaneering International, Inc.

18 Oilfield Review
General Electric (arriba).3 Los manipuladores indus-triales y los vehículos guiados automatizados son las dos tecnologías robóticas más comunes que evolucionaron para ser utilizadas en el ámbito industrial. En el año 2000, los procesos de manipu-lación de materiales y los manipuladores utiliza-dos para las operaciones de soldadura ocupaban tres cuartas partes de las aplicaciones de los robots industriales en EUA.
Anteriormente, la tendencia en materia de aplicaciones industriales de la robótica se centró en la producción en serie, concepto que habría complacido a Henry Ford, a quien se le atribuye
el desarrollo del método de montaje en cadena de la producción automotriz. Los cuatro principios de la producción en serie de Ford —piezas inter-cambiables, flujo continuo, reducción de residuos y la división del trabajo— resultan adecuados para los robots. La división del trabajo permite que un trabajador de la línea de montaje se con-centre en la ejecución optimizada de una tarea en lugar de tener que ejecutar múltiples tareas, posiblemente con menos eficiencia. Según el legado de Ford, no debería sorprender que la industria automotriz mundial emplee más robots que todas las otras industrias juntas.
La introducción exitosa de los robots indus-triales en la fabricación de automóviles pronto fue imitada por otras industrias. La introducción generalizada de los robots en los lugares de tra-bajo trajo aparejado el hecho de que los fabrican-tes comenzaran a demandar una importante personalización para los productos. Esta necesi-dad de personalización, a diferencia de la unifor-midad que caracteriza a la cadena de montaje, fue percibida por los especialistas de la industria robó-tica como un revés en relación con la aceptación de los robots en ciertas industrias. La dificultad asociada con los procesos de reorganización y reprogramación sumó otras deficiencias indesea-das. No obstante, en la década pasada se experi-mentó un resurgimiento de los robots en el sector manufacturero, especialmente en Asia, donde Japón lidera la búsqueda de la robotización. Hoy en día, existe más de un millón de robots industria-les operando en todo el mundo (abajo).4
No obstante, las fábricas de ningún modo representan el único lugar para los robots. La exploración automatizada del espacio constituye un área ideal para el empleo de la robótica. En los primeros días de la exploración del espacio, se asu-mía que los vuelos espaciales tenían que ser tripu-lados para ejecutar las tareas necesarias para la ejecución del viaje. Pero esto no resultó ser así. La única incursión en la superficie de un planeta dife-rente del nuestro, es decir la incursión en Marte, fue la de las naves robóticas Sojourner, en 1997, y Spirit y Opportunity en 2004 (próxima página). Las naves espaciales robóticas automatizadas, Voyager 1 y Voyager 2, se destacan por ser los úni-cos dispositivos hechos por el hombre que partie-ron desde nuestro sistema solar.
Estos viajeros del espacio, aunque no son autónomos, fueron diseñados para detectar su
> El primer robot comercial. El robot industrial Unimate podía manipular piezas de 226 kg [500 lbm] de peso. Este robot removía las piezas fundidas en caliente de las prensas y las apilaba para que fueran utilizadas posteriormente. También se utilizó para colocar bastidores de automóviles soldados. (Copyright de la fotografía, Joseph Engelberger.)
Robotics—Figure 01
> Desarrollo de los robots industriales. El clima económico mundial produjo la suspensión de las nuevas instalaciones de robots industriales en el año 2009; no obstante, ese año, las existencias estimadas de robots industriales operacionales alcanzaron un millón de unidades (izquierda). Entre el año 2006 y el año 2009, Japón estuvo a la cabeza de todos los países en la búsqueda de la robotización industrial (derecha). (Adaptado de la Federación Internacional de Robótica, referencia 4.)
Robotics_Figure 02
1 200
1 000
800
600
400
200
0
Núm
ero
de u
nida
des,
1 0
00
1973 1983 1990 1995 2000
Existencias operacionales mundiales de robots industrializados
† estimado ‡ pronosticado2005 2009† 2013‡
366
454
605
750
9231 025
1 10040 000
35 000
30 000
25 000
20 000
15 000
10 000
5 000
0
Núm
ero
de u
nida
des
Japón Alemania Américadel Norte
20062007
Coreadel Sur
China Italia
Los mercados más grandes para los robots industriales entre 2006 y 2009
† estimado
20082009†

Volumen 22, no. 3 19
entorno y ejecutar tareas sobre la base de sus resultados. La distancia y el tiempo existentes entre la emisión y la recepción de los comandos tornan impracticable el proceso de control remoto. En consecuencia, la intervención de los científicos que trabajan en el área astronáutica fue esencial en muchos de los desarrollos registrados en el campo de la inteligencia artificial (AI). Las lecciones aprendidas con la nave Sojourner fueron aplicadas en las misiones espaciales poste-riores, y la tecnología de programación AI básica mejoró el tiempo de respuesta y la reacción de las naves robóticas en el entorno de Marte.
Sin embargo, para la mayoría de las personas, la experiencia más común con la robótica no está rela-cionada con la exploración del espacio sino con los robots de servicio. Esta rama de la robótica com-prende una amplia gama de aplicaciones domésti-cas, médicas, militares y de otro tipo. Un desarrollo promisorio, dentro de esta categoría, es la provi-sión de asistencia para los seres humanos minus-válidos físicos. La relación interdependiente entre los seres humanos y las máquinas, a dife-rencia de la oposición directa que prevalecía pre-viamente, está abriendo el mundo para muchos seres que padecen limitaciones físicas.
Robótica de última generaciónSi bien no se dispone de una definición universal-mente aceptada, de acuerdo con la norma ISO 8373 de la Organización Internacional para la Norma-lización, un robot se define como un aparato mani-pulador programable en tres o más ejes, controlado automáticamente, reprogramable y multifuncio-nal, que puede estar fijado en un lugar o ser móvil, y cuya finalidad es la utilización en aplicaciones de automatización industrial.
Si se tiene en cuenta la definición de la norma ISO 8373, los robots corresponden a diversas catego-rías basadas en su nivel de complejidad. La más básica es la teleoperación, en la que un operador humano controla a un robot desde cierta distancia. Dado que el operador es remoto, se requiere algún tipo de interfaz. Los ROV y los primeros telemanipu-ladores corresponden a esta categoría.
Un diseño más avanzado, la telepresencia, es similar a la teleoperación pero procura superar algunas de las deficiencias de ésta. La relación maestro-esclavo de las operaciones remotas a menudo produce fatiga cognitiva en el manipula-dor humano. Éste es básicamente el resultado de que las actualizaciones de la información son mucho más lentas de lo que espera o puede proce-sar el cerebro humano. La telepresencia a menudo incorpora la realidad virtual, un medio de inmer-sión, para reducir la fatiga cognitiva. La simula-ción de las acciones de un robot mediante
imágenes del monitor de una computadora, cons-tituye una alternativa con respecto a la realidad virtual. El operador controla una imagen gráfica del robot y los comandos son traducidos y ejecu-tados por el robot físico.
El término háptica, que proviene del griego “tocar“ “relativo al tacto,” es el estudio de la retroalimentación sensorial que ha resurgido en el campo de los manipuladores remotos telepresen-tes en proceso de desarrollo, particularmente en los robots quirúrgicos. La generación de imágenes estereográficas tridimensionales también consti-tuye una forma de mejorar la interfaz ser humano-máquina. Esta tecnología se utiliza extensivamente en la industria de la energía nuclear en la que sólo los robots pueden trabajar dentro y cerca del reactor. Cuando estas plantas fueron desarrolla-das por primera vez, el proceso de guiado de los robots, utilizando imágenes de televisión o moni-tores de computadoras convencionales, era difí-cil porque estas tecnologías no proporcionaban la capacidad de percepción de la profundidad. Las personas con visión en un solo ojo eran más hábi-les para superar esta deficiencia, y la contrata-
ción de seres con visión monocular para operar los robots constituía una práctica usual. La utili-zación de imágenes 3D permitió superar esta limitación.
Ya sea a través de la visualización 3D o de la retroalimentación sensorial, es conveniente para el operador tener el control del equipo en tiempo real o casi real. El control semiautónomo, tam-bién denominado control de supervisión, es otra forma de conectar el hombre a la máquina con mayor complejidad robótica. Existen dos tipos básicos: el control compartido y el cambio de control. En el control compartido, el teleopera-dor imparte instrucciones al robot para que eje-cute una tarea o ejecuta la tarea mediante un proceso de control directo. Un ejemplo de control semiautónomo es el uso de un brazo robótico en el espacio. El operador ordena al brazo que se
3. Dorf RC y Nof SY (eds): Concise International Encyclopedia of Robotics: Applications and Automation. Ciudad de Nueva York: John Wiley & Sons, Inc., 1990.
4. “The International Federation of Robotics Round Table on the Future of Robotics,” 9 de junio de 2010, http://www.worldrobotics.org/downloads/2010_Presentation_IFR_RoundTable.pdf (Se accedió el 31 de agosto de 2010).
> Geólogo robótico. Robots en forma de rovers exploran la superficie del planeta Marte. Equipados con brazos robóticos capaces de realizar movimientos con el codo y la muñeca, similares a los de un ser humano, los rovers emplazan diversos instrumentos contra las rocas y el suelo para obtener mediciones. Entre estos instrumentos se encuentran un espectrómetro de emisión termal para evaluar las adyacencias, un espectrómetro Mössbauer para identificar la presencia de minerales de hierro, un espectrómetro de rayos X y partículas alfa para el análisis elemental de las muestras recolectadas y un generador de imágenes microscópicas para la obtención de fotografías de alta resolución que se envían a la Tierra. La comunicación se mantiene mediante una red de antenas terrestres y dos naves espaciales que orbitan alredor de Marte, transmitiendo mensajes a la Tierra y enviando señales de control directamente a los rovers. El vehículo terrestre Spirit, diseñado para la exploración de Marte, dejó de comunicarse en julio de 2010 luego de casi siete años de exploración y es probable que no sobreviva el brutal invierno marciano. Su contraparte, la sonda Opportunity, continúa operando y el 16 de septiembre de 2010 recorrió unos 81 m [265 pies]. Desde su aterrizaje en enero de 2004, cubrió más de 23 km [14.3 millas] en lo que se planificó originalmente como una misión de tres meses. [Adaptado del sitio Web de la NASA: http://marsrovers.jpl.nasa.gov (Se accedió el 20 de septiembre de 2010). Imagen utilizada con autorización.]
Robotics—Figure 03

20 Oilfield Review
mueva hasta una posición específica y luego toma el control para las tareas que requieren destreza manual.
La modalidad de cambio de control opera según el supuesto de que la máquina robótica es capaz de ejecutar tareas que, una vez iniciadas, no requie-ren la intervención del operador. Un operador puede controlar múltiples robots siempre que no se encuentren con circunstancias inesperadas.
La incertidumbre y las situaciones inesperadas han aumentado la necesidad de contar con cierta inteligencia artificial, la cual corresponde al nivel más avanzado de la robótica.
Existen diversos niveles de robótica AI, pero el método más antiguo es el del paradigma jerárquico surgido en la década de 1960 sobre la base de una secuencia de tipo percepción-planeación-acción (izquierda).5 Los primeros robots con AI operaban habitualmente con este método. Los sensores del robot validan un mundo predefinido, se planifica una tarea en base a su comprensión de ese mundo, y luego el robot actúa en consecuencia. La principal desventaja de este método es la etapa de planeación en la cual, después de que el robot ha definido su mundo, cualquier evento imprevisto puede crear una alteración importante. Este método provee un manejo pobre de la incertidumbre y no existe nin-gún sistema de retroalimentación para validar la ejecución exitosa de una tarea.
Luego de reconocer las deficiencias de este enfoque, la robótica recurrió a las ciencias bioló-gicas como guía. El paradigma reactivo surgió en la década de 1980 y minimizó la fase de planea-ción de la metodología previa. Este sistema com-binó las secuencias de percepción y acción para generar un concepto global del comportamiento; los programadores determinan el comporta-miento deseado y pueden combinar comporta-mientos sobre la base de lo que percibe el robot. Esto es más representativo de los procesos de pensamiento biológico. Por ejemplo, en una situación de tipo luchar o huir, los animales con un pensamiento de orden menor raramente pla-nean una vía de escape; simplemente reaccionan. Las acciones y las reacciones son más rápidas que la planeación premeditada. No obstante, este tipo de reacción puede ser perjudicial si la vía de escape percibida conduce a una trampa.
El problema con la metodología reactiva es que los robots compartían una característica humana; parafraseando a George Santayana: si no aprendían de sus errores, estaban condenados a reiterarlos. En la década de 1990, los roboticistas construyeron máquinas con procesadores poten-tes pero cada vez más baratos. Este incremento de la capacidad permitió la evolución de la teoría de la programación para desarrollar el paradigma híbrido deliberativo/reactivo. Con esta metodolo-gía, un robot reactivo aprende de las experien-cias pasadas y elige una respuesta que ejecuta mejor una tarea, aprendiendo, según se espera, de los intentos pasados.
Mediante la utilización de la metodología híbrida, se han desarrollado numerosas arquitec-turas en un esfuerzo para crear máquinas de pen-samiento autónomo. Conforme la capacidad y la velocidad de procesamiento computacional conti-núan incrementándose y la complejidad del soft-ware evoluciona, es probable que la visión del autor de ciencia ficción acerca de los robots antropomór-ficos se vuelva realidad. No obstante, por ahora, los robots generalmente desempeñan un rol muy dife-rente: las tres D de la robótica.6 Con algunas excep-ciones notables, ejecutan tareas que son sucias (dirty), aburridas (dull) o peligrosas (dangerous). Las tareas difíciles corresponden a una cuarta D a menudo propuesta por los roboticistas.
El campo y la fábricaComo otros robots de servicio, los robots de cam-pos petroleros ejecutan las tres tareas: sucias, aburridas y peligrosas. Estas actividades incluyen operaciones de perforación direccional automati-zada y perforación continua de circuito cerrado. Por otro lado, los robots de servicio tales como los ROV, han hecho posibles las operaciones de per-foración en ambientes de aguas profundas.
> Inteligencia artificial (AI) organizada. La teoría de control para la robótica AI ha evolucionado con el tiempo. La metodología más antigua, el paradigma jerárquico ordenado en forma secuencial, fue desarrollada para que los robots ejecutaran tareas específicas. El paradigma reactivo, que surgió a continuación, es un protocolo más rápido pero carente de capacidades de retroalimentación y corrección de errores. El paradigma híbrido es más adaptativo y brinda mayor flexibilidad. Las versiones híbridas de la AI son en general más robustas y ofrecen un enfoque más cognitivo, o más inteligente, porque los robots se adaptan a los ambientes cambiantes y pueden aprender de sus errores. (Adaptado de Murphy, referencia 2.)
Robotics_Figure 04
Paradigma jerárquico
Paradigma reactivo
Paradigma híbrido deliberativo/reactivo
Percepción Planeación Acción
Percepción Acción
Planeación
Percepción Acción
Robotics—Figure 05
> Varios ROV en acción. Según un protocolo del tipo maestro-esclavo, el operador de control maniobra el ROV subacuático mediante secuencias de control suministradas por umbilicales. (Fotografías utilizadas con autorización de Oceaneering International, Inc.)

Volumen 22, no. 3 21
Cuando las compañías petroleras comenza-ron a explorar en aguas más profundas, el límite de profundidad del lecho marino para las perfo-raciones fue definido por la profundidad máxima de intervención humana. Con equipos de buceo especializados, ese límite llegó hasta aproxima-damente 300 m [1 000 pies]. Los submarinos tri-pulados eran una opción posible pero sólo podían operar hasta unos 600 m [2 000 pies]. Por debajo de estas profundidades, los ROV constituyen la única opción para las operaciones de interven-ción. Por este motivo, todos los equipos de perfo-ración flotantes actualmente en operación poseen al menos un ROV. Incluso en los pozos perforados en tirantes de agua en los que la inte-racción humana es posible, los ROV han reempla-zado a los seres humanos como la principal forma de intervención subacuática.
Los ROV se clasifican como manipuladores controlados en forma remota y pertenecen a la rama de los robots de servicios profesionales de la robótica (página anterior, abajo). Estos dispositi-vos pueden ejecutar una multitud de tareas, siem-pre que hayan sido diseñadas antes del comienzo de la operación. A diferencia de los operadores humanos, que pueden responder a condiciones cambiantes, para los ROV es difícil ejecutar tareas, por simples que sean, cuando las operaciones difieren del plan.7 La experimentación es una opción difícil. Por consiguiente, para los ROV, la planeación del operador es la fase más crítica de la ejecución del trabajo, y la reacción es una función de la capacidad del operador del ROV para com-prender y responder a la situación en cuestión.
Otras aplicaciones de la robótica en la indus-tria del petróleo y el gas pueden reemplazar a los procesos que requieren reacciones que exceden la capacidad humana. Por ejemplo, una técnica recién introducida automatiza un enfoque utili-zado para perforar pozos laterales con arreglos rotativos direccionales. El sistema automatizado de control de rotación de superficie SLIDER uti-liza un procedimiento de perforación robótico (derecha). Basada en una técnica de oscilación (balanceo) del esfuerzo de torsión (torque) (tor-que rocking), esta tecnología ofrece una capa de
automatización que mejora considerablemente la ROP, optimiza la seguridad e incrementa la vida útil del equipo de fondo de pozo. Con esta técnica se han logrado mejoras en la ROP del 294%.8
En la técnica de oscilación del torque que ha sido utilizada durante muchos años, se aplican valores de torque predeterminados, utilizando un sistema de perforación de cabeza rotativa supe-rior. Este torque aplicado en la superficie se disipa en la sarta de perforación antes de llegar al arreglo de fondo de pozo. El objetivo es minimi-zar el arrastre, a la vez que se mantiene inalte-rada la orientación del arreglo de fondo de pozo.
Si bien se logró el control manual de la téc-nica utilizada en secciones laterales cortas y des-viadas, ésta se ha vuelto menos exitosa con el incremento de la complejidad de los perfiles de los pozos. Virtualmente, es imposible ejecutar la técnica manual de oscilación del torque durante la perforación de geometrías de pozos laterales extendidos o pozos complejos debido al gran volu-men de información de las fuentes de datos de entrada, que debe ser integrada y procesada. El sistema SLIDER automatiza la aplicación del torque y reacciona tanto a las condiciones de superficie como a las condiciones de fondo de pozo.
> Control robótico para la técnica de oscilación (balanceo) del torque. El sistema robótico original SLIDER, que se muestra aquí fijado a una consola de perforación (extremo inferior), utilizaba servo-motores para controlar la cabeza de inyección motorizada durante la perforación. Hoy, la interfaz (no mostrada) controla electrónicamente el torque, a la vez que monitorea las condiciones de superficie y de fondo de pozo. En uno de los ejemplos, el sistema SLIDER proporcionó resultados de perforación mejorados, en comparación con el control manual (extremo superior). En 45 minutos, la barrena se bloqueó nueve veces como lo indican los picos de presión (curva roja) con el control manual (sombreado canela) y la orientación de la herramienta fue muy inestable (curva negra). Con el control automatizado (sombreado verde), sólo se produjo un episodio de bloqueo y la orientación de la herramienta fue mucho más estable.
Robotics_Figure 06
360
315
270
225
180
135
90
45
06:00 6:30 7:00 7:30
Tiempo, horas:minutos
Caja de control
Pantalla ycomputadora principal
Control automatizado del torqueControl manual
8:00 8:30Or
ient
ació
n de
la h
erra
mie
nta,
gra
dos
4 000
3 500
3 000
2 500
2 000
1 500
1 000
500
0
Pres
ión,
psi9 bloqueos 1 bloqueo
Presión
Orientaciónde la herramienta
Brazo de balanceo
5. Para obtener información más detallada sobre robótica con inteligencia artificial, consulte: Murphy, referencia 2.
6. Murphy, referencia 2.7. Bleicher A: “The Gulf Spill’s Lessons for Robotics,”
http://spectrum.ieee.org/robotics/industrial-robots/the-gulf-spills-lessons-for-robotics (Se accedió el 7 de septiembre de 2010).
8. Maidla E, Haci M y Wright D: “Case History Summary: Horizontal Drilling Performance Improvement Due to Torque Rocking in 800 Horizontal Land Wells Drilled for Unconventional Gas Resources,” artículo SPE 123161, presentado en la Conferencia y Exhibición Técnica Anual de la SPE, Nueva Orleáns, 4 al 7 de octubre de 2009.

22 Oilfield Review
Robotics—Figure 08
> Robots de asistencia quirúrgica remota. Los SAR, tales como el sistema da Vinci que se muestra en esta gráfica, introducen a los robots en la sala de operaciones. El cirujano (izquierda) se sienta frente a una consola de computación y manipula en forma remota los brazos robóticos. El paciente (centro) es operado con la asistencia del personal de soporte. Los movimientos de las manos del cirujano son percibidos y convertidos electrónicamente en micromovimientos, en la plataforma de operaciones. La capacidad para aumentar el tamaño de la imagen e inspeccionar las áreas problemáticas proporciona mayor control que el que es posible con los métodos quirúrgicos tradicionales. La observación remota (derecha) provee un grado adicional de acceso visual para los procesos de entrenamiento o consulta. (Imagen, cortesía de Intuitive Surgical, Inc., copyright 2010.)
No sólo se mide el torque reactivo en el fondo del pozo y se incorpora en la secuencia cronológica y la magnitud del torque aplicado, sino que el sis-tema detecta la presencia de condiciones peli-grosas —tales como el bloqueo de la barrena, el desenrosque y el atascamiento de la tubería— y adopta acciones correctivas inmediatas.9 La ver-
sión original utilizaba controles robóticos para accionar perillas, mover palancas y oprimir boto-nes. La versión más reciente emplea una interfaz electrónica para controlar los componentes del equipo de perforación existente, regulando la tensión y la corriente con precisión en el panel de control de mando.
Cuatro pozos modelo, que representaban un amplio espectro de tipos y complejidades, fueron estudiados y los beneficios se monetizaron en base al alcance extendido, los ahorros de aditivos para lodo, la reducción de los viajes de la barrena, la velocidad de orientación y el incremento de la ROP en modo de deslizamiento (izquierda). Este pro-ceso robótico mejoró la eficiencia de perforación, bajó los costos y redujo el tiempo inactivo resul-tante de los daños producidos en el equipo de perforación, a la vez que eliminó la formulación de conjeturas que son comunes con las técnicas de oscilación del torque.
A su servicioEl sistema SLIDER es un ejemplo de un robot de servicio, pero no existe ninguna definición inter-nacionalmente aceptada para esta clasificación. La Federación Internacional de Robótica ha adoptado la siguiente definición preliminar: un robot de servicio opera en forma semi o total-mente autónoma con el fin de ejecutar servicios de utilidad para el bienestar de los seres huma-nos y los equipos, excluyendo las operaciones de manufactura.10 Existen dos subcategorías de robots de servicio: los robots de servicios profe-sionales (como el sistema SLIDER, el sistema de desactivación de bombas y los robots quirúrgi-cos) y los robots de servicios personales (como las aspiradoras, las cortadoras de césped y los robots de asistencia a discapacitados).
>Mejoras del sistema de perforación SLIDER. Estos cuatro pozos representan una gama de tipos de pozos y exhiben diferentes eficiencias y modos de ahorro de costos: extensión del alcance (verde), ahorros de aditivos para lodo de perforación (gris), menos viajes de la barrena (rojo), orientación más rápida (naranja) e incremento de la ROP en modo de deslizamiento (azul). Los tipos de pozos se muestran con el incremento del beneficio asociado con el empleo de la técnica robótica de oscilación del torque SLIDER. El pozo 1 fue perforado hasta 396 m [1 300 pies] de TVD con un desplazamiento horizontal de 2 592 m [8 500 pies]. El comienzo de la desviación del pozo 2 se realizó a 2 052 m [6 730 pies], con un desplazamiento horizontal de 1 676 m [5 500 pies]. El pozo 3 es un pozo horizontal perforado hasta una profundidad medida de 2 431 m [7 976 pies]. El pozo 4 es un pozo direccional marino con una inclinación de 58° y que retoma la vertical con un giro de 122°.
Robotics_Figure 07
600
500
400
300
200
100
0
Valo
r del
ben
efic
io, U
SD 1
000
Pozo 1pozo de 5 días
Beneficios del sistema SLIDER
Ahorro del 24%
Pozo 2pozo de 14 días
Ahorro del 28%
Pozo 3pozo de 13 días
Ahorro del 12%
Pozo 4pozo de 30 días
Ahorro del 23%Extensión del alcance horizontal
Menos aditivos para lodo de perforación
Menos viajes de la barrena
Orientación más rápida
Incremento de la ROP en modo de deslizamiento

Volumen 22, no. 3 23
Los robots de asistencia quirúrgica (SAR) constituyen una rama especializada de los robots de servicios profesionales. Estos robots permiten que los médicos lleven a cabo procedimientos mínimamente invasivos, controlados en forma remota, a través de incisiones pequeñas. En algu-nos casos, las cirugías invasivas tradicionales se han limitado a los procedimientos ambulatorios. Gracias a la reducción del trauma físico, el dolor y los tiempos de recuperación se minimizaron considerablemente.
El primer procedimiento con asistencia robó-tica documentado, una biopsia neuroquirúrgica, se llevó a cabo en 1985 con el sistema Puma 560.11 Inmediatamente después, los investigadores de la Administración Nacional de la Aeronáutica y del Espacio (NASA), junto con el Instituto de Investigación de Stanford en Palo Alto, California, EUA, desarrollaron un telemanipulador con habili-dades para la cirugía; su objetivo era transmitir al cirujano, ubicado en otro lugar, la sensación de estar operando un paciente en forma directa. El interés de la NASA se centraba en proveer opciones qui-rúrgicas en operaciones remotas, especialmente en el espacio exterior.
A través del reconocimiento del potencial para estos desarrollos, el ejército de EUA finan-ció las actividades de investigación centradas en el acercamiento del cirujano a los soldados heri-dos mediante telepresencia. En un escenario de este tipo, un soldado es llevado hasta una unidad móvil para ser operado en forma remota. El sis-tema aún no ha sido utilizado con heridos reales en el campo, pero se han efectuado operaciones remotas exitosas en animales, lo cual demostró el tremendo potencial existente para los procedi-mientos quirúrgicos robóticos remotos.12
Los ingenieros y cirujanos que trabajaron en los proyectos anteriores desarrollaron un SAR comer-cial. Con el posicionador endoscópico AESOP, un cirujano utilizó comandos de voz para manipular un brazo robótico que contenía una cámara endoscópica. Construido y comercializado por Computer Motion Inc., éste fue el primer sistema robótico aprobado por la Administración de Alimentos y Drogas de EUA (FDA). Después de extensivos procesos de modificación y rediseño, estos primeros desarrollos evolucionaron para convertirse en el robot quirúrgico de tipo maes-tro-esclavo da Vinci, comercializado por Intuitive Surgical, Inc.
El sistema da Vinci ha sido diseñado para transmitir al cirujano la sensación de estar en contacto directo con el paciente (página ante-rior, abajo). La visualización tridimensional y la capacidad para efectuar una vista ampliada de las áreas de interés proporcionan al cirujano un
mayor control y percepción del que es posible con las técnicas quirúrgicas tradicionales. Las activi-dades de investigación en curso procuran descu-brir formas de incorporar la tecnología háptica, que proporciona a los cirujanos un control aún mayor de los procedimientos operatorios. La FDA aprobó este sistema para los procedimientos qui-rúrgicos laparoscópicos y toráxicos. Existen ensa-yos en curso en relación con la cirugía endoscópica de revascularización cardíaca.13
Entre las ventajas de la cirugía robótica con dispositivos tales como el sistema da Vinci, se encuentran una mínima invasión (a veces deno-minada cirugía sin sangre), la generación de cicatrices menores, la reducción de las tasas de infección, mínimos efectos colaterales y la posibi-lidad de obtener el alta médica en el mismo día o al día siguiente. Uno de estos procedimientos es la prostatectomía laparoscópica asistida con robots. Los métodos pre-robóticos requerían inci-siones grandes, que a menudo ocasionaban com-plicaciones postoperatorias y exigían períodos de
recuperación prolongados. Los pacientes con fre-cuencia experimentaban una excesiva pérdida de sangre durante la cirugía, lo que incrementaba el riesgo de infección postoperatoria. Debido a la internación hospitalaria prolongada y el conside-rable dolor, seguidos por una alta incidencia de disfunciones vesiculares y sexuales, la cirugía a menudo se contemplaba como último recurso. Gracias a la opción quirúrgica robótica, es proba-ble que esto ya no suceda.
En el campo de batalla y de vuelta al hogarLa necesidad de efectuar operaciones quirúrgi-cas remotas en los campos de batalla condujo al desarrollo de los primeros SAR comerciales, pero ésta no es la única aplicación militar de los robots de servicio. En 1990, iRobot Corporation concibió la idea de convertir los robots prácticos en reali-dad. Los fundadores produjeron primero el robot Genghis para la exploración del espacio (arriba).14 Luego apareció una serie de robots de servicio, incluida la serie iRobot PackBot, que se utilizó
> El robot Genghis de la NASA. Desarrollado para la exploración del espacio, el robot Genghis fue modelado con la forma de un insecto. Provisto de un arreglo de sensores, podía atravesar terrenos accidentados pero nunca fue desplegado en el espacio exterior. Actualmente, reside en el Museo Nacional del Aire y del Espacio de la Institución Smithsonian, en Washington, D.C. (Imagen, cortesía de iRobot Corporation.)
Robotics—Figure 09
9. El término “torque reactivo” es definido a los fines prácticos como el tramo de tubería, medido desde la barrena hacia la superficie, que disipa completamente el torque producido durante la perforación en modo de deslizamiento. Se mide mediante la correlación del valor del diferencial de presión en modo de rotación con el mismo valor registrado en modo de deslizamiento.
10. “Provisional Definition of Service Robots,” http://www.ifr.org/service-robots/ (Se accedió el 9 de septiembre de 2010).
11. Lanfranco AR, Castellanos AE, Desai JP y Meyers WC: “Robotic Surgery: A Current Perspective,” Annals of Surgery 239, no. 1 (Enero de 2004): 14–21.
12. Satava RM: “Virtual Reality and Telepresence for Military Medicine,” Computers in Biology and Medicine 25, no. 2 (Marzo de 1995): 229–236.
13. Argenziano M, Katz M, Bonatti J, Srivastava S, Murphy D, Poirier R, Loulmet D, Siwek L, Kreaden U y Ligon D: “Results of the Prospective Multicenter Trial of Robotically Assisted Totally Endoscopic Coronary Bypass Grafting,” Annals of Thoracic Surgery 81, no. 5 (Mayo de 2006): 1666–1675.
14. Jong A, Chen JKC, Yuan BJC y Liu JHJ: “A Study of Personal Service Robot Future Marketing Trend with the Foresight of Technological Innovation,” presentado en la 15a Conferencia Internacional sobre Manejo de la Tecnología, Beijing, 22 al 26 de mayo de 2006.

24 Oilfield Review
para la búsqueda de los restos del World Trade Center, en la Ciudad de Nueva York, en el año 2001. Al año siguiente, se desplegó por primera vez un robot PackBot para uso militar.
Los conflictos militares de Afganistán e Irak representaron la primera vez en que los sistemas robóticos desempeñaron un rol significativo en las operaciones de combate.15 Los robots ejecuta-ron en forma remota actividades tales como el reconocimiento de cuevas y refugios, la detección de sustancias químicas y radiológicas y la desacti-vación de municiones explosivas (izquierda). Entre sus roles principales se encuentran la detección y la desactivación de dispositivos explo-sivos improvisados (IED).
Durante los primeros días de un proyecto aus-piciado por las Naciones Unidas, que utilizó robots para desactivar minas terrestres en Afganistán, surgieron implicancias sociales similares a las experimentadas durante la Revolución Industrial. Para desactivar las minas terrestres se contrató un contingente de trabajadores locales, cuyas contra-partes robóticas eran consideradas una amenaza para sus vidas. Pero, con entrenamiento, descu-brieron que sus trabajos podían efectuarse de manera mucho más segura. En lugar de sentirse desplazados, se dieron cuenta de que los robots les permitían realizar más tareas con menos riesgo.16
En 2002, el mismo año en que el robot PackBot experimentó su primera acción militar, iRobot Corporation lanzó su primer robot de servicios per-sonales para uso doméstico general; el robot aspi-rador iRobot Roomba (izquierda). Este robot utiliza sensores para sortear obstrucciones y su soft-ware, similar al desarrollado para la detección de minas terrestres, garantiza una cobertura com-pleta de una manera eficiente.
Como control, el robot aspirador de pisos Roomba utiliza una lógica similar a la del para-digma reactivo. La unidad calcula un trayecto óptimo para limpiar un piso entero, utilizando el software de inteligencia robótica iRobot Aware 2 (paso correspondiente a la percepción). Luego, la unidad activa uno de los diversos modos de opera-
> Inspectores robóticos. Los dispositivos PackBot, como el que se muestra aquí, fueron los primeros robots utilizados en forma extensiva en aplicaciones militares. Los procesos remotos de inspección y detección permiten al operador evaluar los peligros potenciales desde una distancia segura. (Imagen, cortesía de iRobot Corporation.)
Robotics—Figure 11
> El robot aspiradora Roomba. Desde la introducción de este robot de servicios personales, la popularidad de la aspiradora iRobot Roomba creció de manera continua entre los consumidores. Además, iRobot Corporation vendió más de cinco millones de robots de servicios personales desde el año 2002. (Imagen, cortesía de iRobot Corporation.)
Robotics—Figure 10
15. Everett HR, Pacis EB, Kogut G, Farrington N y Khurana S: “Toward a Warfighter’s Associate: Eliminating the Operator Control Unit,” en Gage DW (ed): Mobile Robots XVII, 5609. Bellingham, Washington, EUA: SPIE Press (Octubre de 2004): 267–279.
16. “A Robotic Helping Hand,” http://www.titech.ac.jp/bulletin/archives_category/topics/topics_z1.html (Se accedió el 20 de agosto de 2010).
17. Guizzo E: “10 Stats You Should Know about Robots but Never Bothered Googling Up,” Automaton, 21 de marzo de 2008, http://spectrum.ieee.org/automaton/robotics/robotics-software/10_stats_you_should_know_about_robots (Se accedió el 7 de septiembre de 2010).
18. “Wheelchair Statistics: How Many Wheelchair Users Are There,” http://www.newdisability.com/wheelchairstatistics.htm (Se accedió el 28 de septiembre de 2010).

Volumen 22, no. 3 25
ción para limpiar el piso (paso correspondiente a la acción). Estos modos abarcan el seguimiento de las paredes (rastreo del perímetro de la habitación y navegación en torno a muebles y obstáculos), el cruce de la habitación (entrecruzamiento para garantizar una cobertura completa) y la descrip-ción de una espiral (limpieza de un área concen-trada). Un sensor de detección de suciedad advierte a la unidad que se necesita una limpieza más intensa y la unidad se ajusta automática-mente a esas condiciones.Cuando el dispositivo termina su tarea, o la batería se descarga hasta alcanzar un valor inferior a un nivel predetermi-
nado, automáticamente vuelve a su estación de recarga y se fondea.
El Levantamiento Robótico Mundial, reali-zado por las Naciones Unidas, estimó que a fines del año 2006 existían 3,54 millones de robots en funcionamiento. Desde entonces, las cifras se incrementaron rápidamente, estimándose que para fines del año 2010 habrá un total de más de 8,3 millones de unidades en funcionamiento, según las proyecciones (arriba).17 Estos robots de servicios personales, aunque inteligentes y servi-ciales, no han alcanzado un estado completa-mente autónomo y a menudo se requiere la
>Números crecientes de robots de servicio. El número de robots de servicios profesionales estuvo dominado a lo largo del año 2004 por los robots subacuáticos, principalmente los ROV (extremo superior). Desde el año 2005 hasta el año 2008, las plataformas robóticas móviles y los robots de campo mostraron un crecimiento significativo. Programadas para funcionar en un ambiente no manufacturero, las plataformas robóticas móviles abarcan una amplia categoría de vehículos con ruedas y vehículos con transmisión a orugas. Los robots de campo trabajan en ambientes no estructurados, tales como minas, bosques y granjas. En el mismo período de cuatro años, los robots de servicios profesionales experimentaron un gran crecimiento, alcanzando la cifra de USD 8 000 millones en términos de ventas (extremo inferior izquierdo). El número de aspiradoras y cortadoras de césped robóticas se incrementó casi cuatro veces para alcanzar más de cuatro millones de unidades (extremo inferior derecho). (Adaptado de Jong et al, referencia 14.)
Robotics_Figure 12
6 000
5 000
4 000
3 000
2 000
1 000
0
Núm
ero
de u
nida
des
Activid
ades
suba
cuáti
cas
Limpie
za
Labo
ratori
o
Constr
ucció
n/
demoli
ción
Medici
na
Plataf
ormas
robóti
cas m
óvile
sCam
po
Defens
a, res
cate
y seg
urida
dLo
gístic
a
Todas
las d
emás
activ
idade
s
9 000
6 000
3 000
8 000
5 000
2 000
7 000
4 000
1 000
0
Mill
ones
de
USD
Tareasdomésticas
Entretenimientoy ocio
Total derobots deservicios
personales
4 500
3 000
1 500
4 000
2 500
1 000
3 500
2 000
500
0
Núm
ero
de u
nida
des,
1 0
00
Aspiradorasy cortadoras
de césped
Entretenimientoy ocio
Otrasactividadesde limpieza
A lo largo de 2004Nuevas instalaciones entre 2005 y 2008
Número de robots de servicios profesionales existentes en todo el mundo
Ventas de robots de servicios personalesNúmero de robots de serviciospersonales vendidos
A lo largo de 2004Nuevas instalacionesentre 2005 y 2008
A lo largo de 2004Nuevas instalacionesentre 2005 y 2008
intervención humana. Con el rápido desarrollo de las tecnologías autónomas, parece razonable suponer que con el tiempo serán comunes los robots domésticos con más autonomía.
Los robots de servicios personales compren-den mascotas robóticas, dispositivos para el cui-dado del césped, la inspección del hogar y su automatización, pero un área con un enorme potencial de crecimiento es la de rehabilitación y asistencia a discapacitados. En EUA solamente, se estima que 3 millones de personas padecen alguna forma de discapacidad que necesita el empleo de una silla de ruedas.18 Muchos indivi-

26 Oilfield Review
duos utilizan exclusivamente una silla de ruedas como principal medio de movilidad. A nivel mun-dial, el número de usuarios de sillas de ruedas es superior a 67 millones.
Los ingenieros están desarrollando robots ortóticos que proveerán movilidad a las personas minusválidas físicas o que han perdido el uso de sus piernas. La Universidad de California, Berkeley Robotics y el Laboratorio de Ingeniería Humana desarrollaron el Exoesqueleto para Extremidades Inferiores (BLEEX), uno de los diversos andadores robóticos. Si bien su diseño fue concebido para permitir que el usuario mani-pule cargas grandes con un mínimo esfuerzo, también puede ser adaptado para asistir a las personas con movilidad deficiente. El sistema se fija a las caderas y las piernas; los sensores ayu-
> Dispositivo asistido por potencia para ayudar a caminar. El dispositivo biométrico BLEEX, desarrollado por la Universidad de California y el Laboratorio de Ingeniería Humana y Robótica de la Universidad de Berkeley, permite que el usuario realice maniobras con cargas extremas, sintiendo que acarrea cargas de unas pocas libras. Diseñado para la optimización de la resistencia y la tolerancia, éste y otros dispositivos similares podrían utilizarse para proveer movilidad a personas con deficiencias físicas. (Fotografía, cortesía del Dr. H. Kazerooni de la Universidad de California, en Berkeley, utilizada con autorización.)
Robotics—Figure 13
dan a los usuarios a levantar las piernas, subir y desplazarse hacia adelante a la vez que mantie-nen la estabilidad. La potencia proviene de un paquete portátil (abajo a la izquierda).19
El estado actual de las capacidades motrices robóticas sigue siendo deficiente, si se compara con las capacidades de los seres humanos y los ani-males. Existen en curso considerables actividades de investigación en este área para optimizar la interfaz ser humano-máquina con el objeto de mejorar la movilidad y restituirla en el caso de quienes la han perdido.20 Mientras tanto, las sillas de ruedas robóticas que responden a comandos y son modificadas para subir escaleras constituyen un área promisoria.
Ciertos cuadriplégicos, que perdieron el uso de las manos, emplean una técnica de tipo “soplo-succión” para controlar las sillas de ruedas motori-zadas y operar computadoras. El usuario sopla por un tubo, generando presión de aire, lo que se tra-duce en comandos que son interpretados por una interfaz de computadora. El método presenta diversas desventajas, incluida la lentitud de su res-puesta, el conjunto limitado de comandos y la necesidad de limpiar el tubo con frecuencia. Dado que esta técnica requiere el control del diafragma, es probable que no resulte beneficiosa para los usuarios de respiradores. Los investigadores del Instituto de Tecnología de Georgia en Atlanta, EUA, desarrollaron recientemente un sistema impulsado por la lengua (TDS) que ha abierto un nuevo mundo de oportunidades para las personas con discapacidades (próxima página, arriba).21 La tecnología de asistencia, operada con la len-gua, puede manejar una computadora o dirigir una silla de ruedas.
Conectada directamente al cerebro por el ner-vio hipogloso en lugar de la médula espinal, por lo general la lengua no es afectada por las lesiones de la médula espinal. Los movimientos de la lengua son rápidos, precisos y requieren poco esfuerzo concentrado para su control. Además, el músculo de la lengua no se fatiga fácilmente. Un TDS puede sustituir potencialmente los movimientos de los brazos y las manos. Los reemplazos de estas funcionalidades se consideran prioridades máximas para las personas con discapacidades severas.
El TDS es mínimamente invasivo, discreto, sin contactos, inalámbrico y portátil y utiliza un imán del tamaño de un grano de arroz implan-tado o aplicado en la lengua. Los sensores exter-nos detectan el movimiento del imán y el software lo convierte. Y es posible ejecutar una serie de operaciones, incluido el empleo de una palanca de control virtual para desplazar una silla de rue-
das u operar una computadora. Este desarrollo novedoso demuestra la existencia de una interfaz efectiva entre el hombre y la máquina, que puede mejorar considerablemente la calidad de vida.
El TDS funciona como un robot de tipo maes-tro-esclavo, convirtiendo el movimiento en coman-dos. La relación simbiótica suprema sería el control de un robot mediante la utilización de una interfaz cerebro-máquina. Si bien este planteo puede parecer ciencia ficción, en el año 2009 el sector de investigaciones de Honda Motors, junto con el Instituto de Investigaciones Avanzadas para las Telecomunicaciones, afiliado por el gobierno de Japón, y la empresa fabricante de equipos Shimadzu con base en Japón, mostraron un dispo-sitivo que responde a la actividad del cerebro y no requiere ningún movimiento del cuerpo.22 El dispo-sitivo mide la actividad eléctrica que tiene lugar en el cerebro de una persona, utilizando la técnica de electroencefalografía, y mide el flujo sanguíneo con espectroscopía de infrarrojo cercano. Honda se atribuye un índice de éxito del 90% en la utiliza-ción de este método para analizar correctamente los pensamientos.
Qué ofrece el futuroAl final del siglo pasado, debido en parte a su per-fil asociado con la ficción, a menudo los robots eran considerados enemigos potenciales de la humanidad. Hoy, la mayoría de las personas se muestran deseosas de adoptar la tecnología en general y los robots en particular. El programa Excelencia para el Desarrollo Educativo (SEED) de Schlumberger es un programa educativo sin fines de lucro, basado en voluntarios, dirigido a las comunidades insuficientemente atendidas en las que viven y trabajan empleados de Schlumberger. Los voluntarios, profesores y alumnos incorporan la robótica en los proyectos, los talleres y las acti-vidades cotidianas de las escuelas. Mediante la utilización de tableros de GoGo —microcontrola-dores baratos que pueden ser programados para ejecutar funciones robóticas— los alumnos están creando proyectos innovadores que cubren una amplia gama de tópicos.23
En un taller SEED realizado recientemente en Tyumen, Rusia, los alumnos diseñaron y cons-truyeron una tortuga robótica que se arrastraba sobre una mesa sin caerse (próxima página, abajo). Al detectar el borde de la mesa, un sensor dirigía la tortuga de manera de hacerla retroce-der y alejarse. En Brasil, alumnos y profesores construyeron un modelo de sistema de irrigación automático. El agua de lluvia, recolectada desde el techo, se almacenaba en una cisterna y cuando un sensor de humedad determinaba que el suelo

Volumen 22, no. 3 27
Robotics—Figure 14
> La potencia de la lengua. Este dispositivo accionado con la lengua utiliza un imán pequeño y sensores externos (izquierda) con una interfaz de computadora. El dispositivo provee movilidad a las personas con discapacidades físicas severas y supera las limitaciones de los métodos tradicionales de asistencia, tales como los dispositivos de soplo-succión. Además, puede ser programado para ejecutar una serie de operaciones, incluyendo el control de una silla de ruedas robótica (derecha). (Fotografías, cortesía del Instituto de Tecnología de Georgia.)
> La robótica y los talleres SEED. Este alumno utiliza un equipo de construcción durante un taller SEED para construir una tortuga robótica. Mediante el acceso a la programación con computadora, a través de equipos y tableros de GoGo de bajo costo, los alumnos de todo el mundo están aprendiendo robótica.
Robotics—Figure 15
estaba seco, el sistema activaba una bomba de irrigación. En el Colegio Alfonso Jaramillo de Bogotá, en Colombia, un club de robótica enri-queció la experiencia de todos los alumnos en materia de aprendizaje con diversos proyectos prácticos, que incluyeron un sistema robótico de recolección de agua pluvial. En parte, debido al interés generado por el club de robótica, la escuela adquirió mayor respeto dentro de la comunidad local.
Con el desarrollo continuo de la tecnología y el incremento casi exponencial de la capacidad de procesamiento computacional, el potencial para la simbiosis entre los seres humanos y las máquinas se está acercando a la realidad. Si se considera la rápida evolución de la computación personal y el crecimiento de Internet, será intere-sante observar los nuevos desarrollos que tendrán lugar en el campo de la robótica; los logros se registrarán con una rapidez jamás imaginada por los especialistas. Los roboticistas del futuro traza-rán un camino para las máquinas de pensamiento, que se extenderá más allá de las tareas sucias, aburridas o peligrosas para acceder a áreas con las que hoy sólo podemos soñar. Se espera que el resto de los países también abrace el mundo dinámico de la robótica como lo han hecho los alumnos de Rusia, Brasil y Colombia. —TS
19. “Berkeley Lower Extremity Exoskeleton,” http://bleex.me.berkeley.edu/bleex.htm (Se accedió el 1º de octubre de 2010).
20. European Robotics Research Network, http://www.euron.org/resources/projects/2010 (Se accedió el 30 de agosto de 2010).
21. Huo X y Ghovanloo M: “Using Unconstrained Tongue Motion as an Alternative Control Mechanism for Wheeled Mobility,” IEEE Transactions on Biomedical Engineering 56, no. 6 (Junio de 2009): 1719–1726.
“Magnetic Control: Tongue Drive System Allows Individuals with Disabilities to Operate Powered
Wheelchairs and Computers,” http://gtresearchnews.gatech.edu/newsrelease/tongue-drive.htm (Se accedió el 7 de septiembre de 2010).
22. “Honda, ATR y Shimadzu Jointly Develop Brain-Machine Interface Technology Enabling Control of a Robot by Human Thought Alone,” http://world.honda.com/news/2009/c090331Brain-Machine-Interface-Technology/ (Se accedió el 9 de septiembre de 2010).
23. Para obtener más información sobre los proyectos de robótica de SEED, consulte: http://www.seed.slb.com/voices_article.aspx?id=35753&terms=robotics (Se accedió el 1º de octubre de 2010).

28 Oilfield Review
El play presalino de Brasil
En Brasil, la búsqueda de autonomía energética ha dirigido las campañas de
exploración a través de la vastedad del territorio, desde sus cuencas interiores hasta
sus aguas marinas profundas. Los conocimientos técnicos especiales y las técnicas
desarrolladas para explotar los campos de aguas profundas de la cuenca de Campos
han sido adaptados a los pozos de la cuenca de Santos, algunos de los cuales están
apuntando como objetivos a los yacimientos carbonatados sellados por debajo de
una capa evaporítica de gran espesor. A su vez, los modelos de exploración de la
extensión productiva (play) presalina de la cuenca de Santos condujeron a descu-
brimientos significativos en las cuencas vecinas.
Craig J. BeasleyJoseph Carl FidukHouston, Texas, EUA
Emmanuel BizeAustin BoydMarcelo FrydmanAndrea Zerilli Río de Janeiro, Brasil
John R. DribusNueva Orleáns, Luisiana, EUA
Jobel L.P. MoreiraAntonio C. Capeleiro PintoPetrobrasRío de Janeiro, Brasil
Traducción del artículo publicado en Oilfield Review, Otoño de 2010: 22, no. 3.Copyright © 2011 Schlumberger.Por su colaboración en la preparación de este artículo, se agradece a Celso C.M. Branco y Breno Wolff, Petrobras, Río de Janeiro, Brasil; Carolina Castro, Houston; y Joao Felix, Antonio P. Ferreira, Patricia Marcolla, Attilio Pisoni y Ana Zambelli, Río de Janeiro.
1. El volumen recuperable potencial de 5 000 a 8 000 millones de barriles de petróleo equivalente, corresponde a un área cubierta por el plan de evaluación PA-RJS-628, que abarca tanto el área de Tupi como el área de Iracema.
Beltrão RLC, Sombra CL, Lage ACVM, Fagundes Netto JR y Heriques CCD: “Challenges and New Technologies for the Development of the Pre-Salt Cluster, Santos Basin, Brazil,” artículo OTC 19880, presentado en la Conferencia de Tecnología Marina, Houston, 4 al 7 de mayo de 2009.
2. Petrobras, BG Group y Partex fueron socios en el pozo de Parati, donde Petrobras actuó como operador.
3. Parshall J: “Presalt Propels Brazil into Oil’s Front Ranks,” Journal of Petroleum Technology 62, no. 4 (Abril de 2010): 40–44, http://www.spe.org/jpt/print/archives/2010/04/13Brazil.pdf (Se accedió el 6 de agosto de 2010).
4. Parshall, referencia 3.5. “BG, Petrobras Announce Discovery of Oil Field in Santos
Basin Offshore Brazil,” Drilling Contractor 62, no. 6 (Noviembre-diciembre de 2006): 8.
Período Época Edad Años,Ma
Mio
ceno
Neó
geno
Olig
ocen
oEo
ceno
Pale
ógen
o
Pale
ocen
o
Terc
iario
Cret
ácic
o
Langhiense
Burdigaliense
Aquitaniense
Chatiense
Rupeliense
Lutetiense
Ypresiense
Tanetiense
Selandiense
Daniano
Campaniano
Santoniano
Coniaciano
Turoniano
Cenomaniano
Albiano
Aptiano
Barremiano
Hauteriviano
Valanginiano
Berriasiano
Piacenziano
Zancleano
Mesiniense
Tortoniense
Serravaliense
Priaboniense
Bartoniense
Maestrichtiano
Tardío
Temprano
T
M
T
T
T
T
M
T
T
M
T
Plioceno2,6
5,3
23
33,9
55,8
65,5
99,6
145,5
San Pablo
Pagalu
Bioko
Río de Janeiro
MontevideoCiudaddel Cabo
Pointe-Noire
Monrovia
Santa Helena
Tristan da Cunha
Fosa
de B
enue
Dorsa
l de W
alvis
Promontorio submarino de Topaz
0°
10° N
10° S
20° S
30° S
San PabloSao Tome
Luanda
EtendekaMeseta de
Lagos
Mapa adaptado de Grothe PR: ETOPO1 Ice Surface Global Relief Model. Boulder, Colorado, EUA: Cooperative Institute for Research in Environmental Science, 2009. Esta publicación del gobierno de EUA es de dominio público: http://www.ngdc.noaa.gov/mgg/global/relief/ETOPO1/posters/ETOPO1–atlantic–centered–36x56.pdf (Se accedió el 28 de octubre de 2010).
Río Amazonas
Zona de fracturas de Doldrums
Dorsal Fernando de Noronha
Promontorios submarinos de Vitoria-Tindade
Lineamiento de Río de Janeiro
Lineamiento de FlorianópolisElevación de Río Grande
Zona de fracturas de RomancheZona de fracturas 4º � N
Zona de fracturas de Chain
Lineamiento de Sergipe
Dor
sal m
edio
-oce
ánic
a
Lineamiento de Salvador
Zona de fracturas
Rí
o Congo

Volumen 22, no. 3 29
El descubrimiento de una acumulación gigante de petróleo en las aguas ultraprofundas de la costa sudeste de Brasil está abriendo una nueva frontera en materia de exploración y producción. El play presalino, fundado en el descubrimiento del campo Tupi en la cuenca de Santos, está extendiendo los límites tecnológicos conforme los equipos de E&P procuran definir sus límites geográficos. Con un volumen recuperable poten-cial de 795 millones a 1 300 millones de m3 [5 000 a 8 000 millones de bbl] de petróleo equivalente, la estructura del campo Tupi es sólo una de las muchas que se encuentran ubicadas debajo de una capa de sal de gran espesor.1
El pozo del campo Tupi no fue el descubridor de los hidrocarburos presalinos de la cuenca de Santos. En el año 2005, la compañía petrolera esta-tal de Brasil, Petróleo Brasileiro SA o Petrobras,
perforó un pozo exploratorio en el área prospec-tiva de Parati, a unos 70 km [43 millas] de Tupi.2 El pozo exploratorio de Parati, situado en el Bloque BM-S-10 de la cuenca de Santos, descu-brió gas condensado por debajo de la sal.3 El pozo de Parati confirmó un modelo geológico, previa-mente no comprobado, que condujo al descubri-miento del campo Tupi en el año 2006.
El campo Tupi se encuentra ubicado en el Bloque BM-S-11 de la cuenca de Santos a una pro-fundidad de 2 126 m [6 975 pies] de agua, a aproxi-madamente 250 km [155 millas] al sudeste de Río de Janeiro. En ese campo, el pozo 1-RJS-628A des-cubrió una zona productiva al ser perforado hasta una profundidad total verdadera (TVD) de 4 895 m [16 060 pies] submarinos.4 El pozo produjo con un régimen de 779 m3/d [4 900 bbl/d] de petróleo y 187 000 m3/d [6,6 MMpc/D] de gas a través de
un estrangulador (orificio) de 5/8 pulgadas.5 Un pozo de extensión perforado al año siguiente con-firmó las estimaciones previas, anunciadas por Petrobras y sus socios BG Group y Galp Energia, lo que atrajo la atención mundial hacia el play presalino de Brasil.
Desde el punto de vista geológico, este play es un producto del desarrollo de procesos tectónicos y depositacionales interminablemente lentos, que involucraron episodios de rifting continental, expansión del fondo oceánico y sedimentación. Estos procesos se asociaron con la separación entre América del Sur y África, acaecida durante el desmembramiento de Gondwana en el Cretácico. Los procesos depositacionales formaron las capas generadoras (capas madre), las capas prospectivas y las capas que actúan como sellos, necesarias para formar un sistema petrolero viable.
Período Época Edad Años,Ma
Mio
ceno
Neó
geno
Olig
ocen
oEo
ceno
Pale
ógen
o
Pale
ocen
o
Terc
iario
Cret
ácic
o
Langhiense
Burdigaliense
Aquitaniense
Chatiense
Rupeliense
Lutetiense
Ypresiense
Tanetiense
Selandiense
Daniano
Campaniano
Santoniano
Coniaciano
Turoniano
Cenomaniano
Albiano
Aptiano
Barremiano
Hauteriviano
Valanginiano
Berriasiano
Piacenziano
Zancleano
Mesiniense
Tortoniense
Serravaliense
Priaboniense
Bartoniense
Maestrichtiano
Tardío
Temprano
T
M
T
T
T
T
M
T
T
M
T
Plioceno2,6
5,3
23
33,9
55,8
65,5
99,6
145,5
San Pablo
Pagalu
Bioko
Río de Janeiro
MontevideoCiudaddel Cabo
Pointe-Noire
Monrovia
Santa Helena
Tristan da Cunha
Fosa
de B
enue
Dorsa
l de W
alvis
Promontorio submarino de Topaz
0°
10° N
10° S
20° S
30° S
San PabloSao Tome
Luanda
EtendekaMeseta de
Lagos
Mapa adaptado de Grothe PR: ETOPO1 Ice Surface Global Relief Model. Boulder, Colorado, EUA: Cooperative Institute for Research in Environmental Science, 2009. Esta publicación del gobierno de EUA es de dominio público: http://www.ngdc.noaa.gov/mgg/global/relief/ETOPO1/posters/ETOPO1–atlantic–centered–36x56.pdf (Se accedió el 28 de octubre de 2010).
Río Amazonas
Zona de fracturas de Doldrums
Dorsal Fernando de Noronha
Promontorios submarinos de Vitoria-Tindade
Lineamiento de Río de Janeiro
Lineamiento de FlorianópolisElevación de Río Grande
Zona de fracturas de RomancheZona de fracturas 4º � N
Zona de fracturas de Chain
Lineamiento de Sergipe
Dor
sal m
edio
-oce
ánic
a
Lineamiento de Salvador
Zona de fracturas
Rí
o Congo

30 Oilfield Review
> Pluma convectiva del manto. El material del manto en ascenso se levanta desde la astenosfera con las corrientes convectivas. Dependiendo del espesor y de la resistencia de la litosfera suprayacente, la pluma convectiva puede penetrar la corteza como un volcán, o residir por debajo de la litosfera, fusionando la base de la capa suprayacente y haciendo que se estire y se dilate en sentido ascendente como un punto caliente. Cuando una placa litosférica se desplaza por encima de una pluma convectiva fija, puede dejar una huella de volcanes y promontorios submarinos que trazan la dirección de la deriva.
Fusión de la litosferaLitosfera
Astenosfera
Pluma convectiva del manto
Volcán asociado con un punto calienteLevantamiento termal debido a lapresencia de un punto caliente
Corri
ente
de
conv
ecci
ón
Oilfield ReviewAutumn 10PreSalt Fig. 2ORAUT10-Prslt Fig. 2
En parte, la viabilidad tecnológica del play presalino es el resultado de la experiencia del operador, adquirida a través de la superación de los desafíos que plantea la construcción de pozos
en aguas profundas y ultraprofundas frente a la costa de Brasil. Igualmente importantes son las mejoras registradas en materia de generación de imágenes sísmicas, que permiten a los geofísicos
identificar estructuras potenciales ocultas por debajo de las evaporitas estratificadas que pue-den alcanzar 2 000 m [6 560 pies] de espesor.
Este artículo analiza la geología y la historia del play presalino de Brasil, y describe los desa-fíos asociados con la exploración y la producción de los yacimientos carbonatados presalinos.
De los estratos postsalinos a los presalinosDesde la perspectiva de E&P, el play presalino de Brasil es un fenómeno relativamente nuevo. Efectivamente, la mayoría de los operadores de áreas marinas exploraron áreas prospectivas en canales deltaicos y turbiditas de aguas profun-das, que yacían sobre los depósitos salinos pro-fundos de las cuencas a lo largo de la costa sudeste de Brasil, recién en el año 2005. Con el descubrimiento de los yacimientos presalinos, esos objetivos presentes en los estratos que yacen por encima de la sal, se designan como áreas prospectivas postsalinas o suprasalinas.
La tendencia presalina de Brasil difiere signifi-cativamente de la tendencia subsalina del Golfo de México.6 Los pozos presalinos son perforados en for-maciones que fueron depositadas antes del empla-zamiento de una capa de sal autóctona; sal que permanece en su nivel estratigráfico original. Esta sal autóctona suprayace rocas más antiguas y, a la vez, sobre ella descansan estratos más modernos. Por el contrario, los pozos subsalinos son perforados en formaciones que yacen por debajo de domos móviles de sal alóctona; masas de sal alimentadas por la capa autóctona original, que se levantan a través de las capas suprayacentes y luego se expan-den lateralmente (izquierda, extremo superior). Sin lugar a dudas, el diapirismo salino es una fuerza activa en las cuencas del área marina de Brasil, y los pozos suprasalinos aún explotan las trampas estructurales resultantes del movimiento de la sal; no obstante, este artículo se concentrará en los objetivos presalinos más recientes.
Si bien las campañas de exploración de los depó-sitos presalinos de Brasil se centran principalmente en las cuencas de Santos, Campos y Espíritu Santo, también se han descubierto capas de sal en otras partes de la costa de Brasil; en las cuencas de Cumuruxatiba, Jequitinhonha, Camamu-Almada y Sergipe-Alagoas.7 El espesor de los depósitos eva-poríticos es considerablemente variable entre una cuenca y otra. En su punto más ancho, la cuenca salina tiene una extensión de unos 400 km [250 millas] en la cuenca de Santos, pero se estrecha hacia el norte, alcanzando un ancho de menos de 100 km [62 millas] en la cuenca de Sergipe-Alagoas.8
> Estratos presalinos versus subsalinos. Los domos móviles de sal alóctona se despegan de las capas de sal autóctona de gran espesor. Ambos tipos de sal son capaces de formar trampas y sellos para los hidrocarburos en proceso de migración. Los pozos presalinos apuntan como objetivo a los yacimientos que se encuentran debajo de la capa de sal autóctona. Los pozos subsalinos apuntan como objetivo a los yacimientos que se encuentran debajo del domo móvil de sal alóctona. Los pozos postsalinos apuntan como objetivo a las formaciones que se encuentran por encima de la sal.
Oilfield ReviewAutumn 10PreSalt Fig. 1ORAUT10-Prslt Fig. 1
Estratos presalinos
Estratossubsalinos
Estratos postsalinos
Sal autóctona
Fondo marino
Sal alóctona

Volumen 22, no. 3 31
Los cimientos tectónicosLa geología del play presalino está relacionada con los movimientos tectónicos que condujeron al des-membramiento del supercontinente de Gondwana. La separación, impulsada por el calor proveniente del núcleo de la Tierra, fue ocasionada por proce-sos de levantamiento termal y rifting que final-mente culminaron en la expansión del fondo oceánico que aún persiste en nuestros días. Estos procesos generan un marco geológico que se remonta a unos 150 millones de años atrás, en el que los eventos rápidos pueden haber insumido entre 2 y 3 millones de años y las ocurrencias loca-les pueden haberse esparcido a lo largo de 1 000 km [620 millas] o una distancia mayor, por lo que se necesita una visión global de conjunto.
Las masas continentales cabalgan sobre las placas litosféricas, por encima de un manto par-cialmente fusionado. El manto fusionado fluye lentamente a lo largo de celdas de convección que transfieren el calor desde el centro de la Tierra hasta su superficie. A medida que se desplazan, algunas placas se deslizan sobre el magma en ascenso, en la astenosfera. Este magma asciende desde las profundidades, en una pluma convec-tiva del manto que forma puntos calientes locali-zados a medida que conduce el calor hacia arriba (página anterior, abajo).9 Hoy, los volcanes, los
promontorios submarinos y las coladas basálticas pueden utilizarse para rastrear el trayecto anti-guo de la migración de las placas sobre un punto caliente.
Cuando una pluma convectiva del manto se levanta por debajo de una placa continental, tam-bién puede producir la dilatación de la corteza suprayacente. El proceso de levantamiento ter-mal, o formación de domos en la corteza conti-nental y el manto superior, es seguido por la formación de fallas conforme la corteza se estira, disminuye de espesor y se debilita. En la cresta del levantamiento se forman rifts que se irradian hacia afuera, con incrementos de aproximadamente
120º. Estos rifts se unen para formar un sistema de punto triple (triple junction); habitualmente, dos rifts activos forman un solo límite de acreción donde las placas comienzan a separarse, en tanto que el tercer rift se vuelve inactivo como un brazo fallido o un rift abortado (izquierda). El brazo fallido a menudo se convierte en el lugar especí-fico de la presencia de volcanismo u otra activi-dad magmática.10 Algunos brazos fallidos se convierten en los sitios de desarrollo de basaltos de inundación, que se asocian con el impacto de una pluma convectiva del manto contra la base de una placa litosférica. Conforme las placas con-tinúan desviándose, el magma se eleva para relle-nar los rifts en proceso de expansión.11
El decaimiento termal tiene lugar una vez que la placa se aparta del punto caliente y la corteza estirada comienza a hundirse porque el enfria-miento hace que se contraiga y se vuelva más densa.12 Las cuencas resultantes se rellenan gra-dualmente con capas generadoras potenciales, rocas yacimiento y evaporitas. Estas cuencas de hundimiento térmico (sag) se convertirían en el sitio para la exploración presalina en ambos lados del Atlántico Sur.
La geología del presalinoLos descubrimientos presalinos de Brasil y una porción sustancial de sus campos postsalinos se encuentran cargados con hidrocarburos genera-dos en rocas generadoras lacustres. Estos depósi-tos lacustres ricos en materia orgánica se formaron a través de una serie de eventos asocia-dos con el desmembramiento del oeste de Gondwana. Dicho desmembramiento acaeció en el Cretácico Temprano; con un desplazamiento de 2 a 5 cm/año [0,8 a 2 pulgadas/año], en sentido horario, la separación entre América del Sur y África requirió casi 40 millones de años; desde el Valanginiano Temprano hasta el Albiano Tardío.13
6. Para obtener más información sobre la tendencia submarina del Golfo de México, consulte: Dribus JR, Jackson MPA, Kapoor J y Smith MF: “La recompensa que yace bajo la sal,” Oilfield Review 20, no. 3 (Invierno de 2008/2009): 4–19.
7. Karner GD y Gamboa LAP: “Timing and Origin of the South Atlantic Pre-Salt Sag Basins and Their Capping Evaporites,” en Schreiber BC, Lugli S y Ba˛bel M (eds): Evaporites Through Space and Time. Londres: Sociedad Geológica, Publicación Especial 285 (2007): 15–35.
8. Szatmari P: “Habitat of Petroleum Along the South Atlantic Margins,” en Mello MR y Katz BJ (eds): Petroleum Systems of South Atlantic Margins. Tulsa: The American Association of Petroleum Geologists, Memoria 73 de la AAPG (2000): 69–75.
9. Se considera que la litosfera frágil, compuesta por la corteza y el manto juntos, cabalga sobre una astenosfera intensamente dúctil y más profunda compuesta por el manto inferior. A su vez, el manto inferior rodea al núcleo de la Tierra.
> Vista en planta de un sistema de punto triple. Los levantamientos sobre las plumas convectivas del manto desarrollan rifts crestales que se intersectan formando ángulos de aproximadamente 120°. Dos brazos activos forman un rift en expansión que se aparta del cuerpo principal de una placa, dejando un rift abortado inactivo, o brazo fallido, caracterizado habitualmente por la actividad volcánica.
10. Burke K y Dewey JF: “Plume-Generated Triple Junctions: Key Indicators in Applying Plate Tectonics to Old Rocks,” Journal of Geology 81, no. 4 (1973): 406–433.
11. Para obtener más información sobre cómo el movimiento de las placas afecta al mundo moderno, consulte: Bunting T, Chapman C, Christie P, Singh SC y Sledzik J: “La ciencia de los tsunamis,” Oilfield Review 19, no. 4 (Invierno de 2007/2008): 4–18.
Coates R, Haldorsen JBU, Miller D, Malin P, Shalev E, Taylor ST, Stolte C y Verliac M: “Tecnologías de campos petroleros para la ciencia sísmica,” Oilfield Review 18, no. 2 (Otoño de 2006): 26–37.
12. Quinlan GM: “Models of Subsidence Mechanisms in Intracratonic Basins, and Their Applicability to North American Examples,” en Beaumont C y Tankard AJ (eds): Sedimentary Basins and Basin-Forming Mechanisms. Calgary: Canadian Society of Petroleum Geologists, Memoria 12 (1987): 463–481.
13. Szatmari, referencia 8.
Actividadvolcánica
Rift abortado
Valle de rift
Valle
de
rift
120
120
120
Oilfield ReviewAutumn 10PreSalt Fig. 3ORAUT10-Prslt Fig. 3

32 Oilfield Review
, Sistema de punto triple de la cuenca del Paraná. Para trazar el sistema de punto triple del Paraná, se utilizan las correlaciones entre los enjambres de diques de Brasil y los de Angola y Namibia. A lo largo de la costa de Namibia, cerca de Etendeka, se encuentran basaltos de composición similares a los basaltos de inundación del Arco de Ponta Grossa. (Adaptado de Coutinho, referencia 16.)
Oilfield ReviewAutumn 10PreSalt Fig. 5ORAUT10-Prslt Fig. 5
NAMIBIA
Basaltos
km
millas 500
0
0
500
Bra
zo s
ur
San Paulo
Arco de Ponta Grossa
Brazo norte
Río de Janeiro
Montevideo
Florianópolis
B R A S I L
ANGOLA
Meseta deEtendeka
, Puntos calientes en el sur del Océano Atlántico. Las plumas convectivas del manto, de gran escala, ubicadas actualmente cerca de las islas de Tristan da Cunha y Santa Helena, intervinieron en el debilitamiento de la corteza durante las fases iniciales de rifting entre América del Sur y África. La pluma convectiva de Tristan fue responsable de los basaltos de inundación de la cuenca del Paraná. La pluma convectiva de Santa Helena se desarrolló posteriormente y se asocia con el rift abortado de la Fosa de Benue en Nigeria. (Adaptado de Wilson, referencia 14.)
Oilfield ReviewAutumn 10PreSalt Fig. 4ORAUT10-Prslt Fig. 4
Punto caliente deTristan da Cunha
Meseta deEtendeka
Fosa de Benue
Arco de Ponta Grossa
km
millas 1 000
0
0
1 000
Basaltos deinundacióndel Paraná
Basaltos
Punto calientede Santa Helena
El desmembramiento comenzó con la fase de rifting, en la porción meridional extrema de lo que es hoy América del Sur. Dos plumas convecti-vas principales del manto —la pluma de Santa Helena al norte y la pluma Tristan da Cunha al sur— contribuyeron al debilitamiento de la litos-fera continental (izquierda, extremo superior).14 El levantamiento termal y el adelgazamiento de la corteza continental generaron fracturas de tensión que posteriormente se convirtieron en conductos para el magma, formando diques ígneos.15 Cientos de estos diques atraviesan la actual línea de costa sudeste de Brasil, y sus orientaciones se utilizan para trazar un sistema importante de punto triple (izquierda, extremo inferior). Los enjambres de diques costeros mar-can los brazos norte y sur de un sistema de punto triple generado por una pluma convectiva, que se centra en la costa del Estado de Paraná en Brasil. Estos brazos activos ayudaron a conformar la línea de costa actual, en tanto que el tercer brazo, conocido como Arco de Ponta Grossa, fue abortado y se convirtió en el lugar específico de la actividad basáltica.16

Volumen 22, no. 3 33
Como resultado, se produjo la extrusión de los basaltos de inundación masivos en la cuenca terrestre del Paraná, extendiéndose desde el sur de Brasil hasta Paraguay, Uruguay y el norte de Argentina, y cubriendo un área de 1 200 000 km2 [463 320 millas2] (arriba). El apilamiento de los diferentes tipos de magma indica que el sitio principal del magmatismo se desplazó hacia el norte con el tiempo, lo que condujo a ciertos investigadores a deducir que la generación de los basaltos de inundación del Paraná está relacio-nada con la propagación del rifting del Atlántico Sur hacia el norte.17
Cuando la corteza continental se fracturó a lo largo de los rifts, los rifts adyacentes se asocia-ron entre sí, formando un límite transformante-
14. Wilson M: “Magmatism and Continental Rifting During the Opening of the South Atlantic Ocean: A Consequence of Lower Cretaceous Super-Plume Activity?” en Storey BC, Alabaster T y Pankhurst RJ (eds): Magmatism and the Causes of Continental Break-Up. Londres: Sociedad Geológica, Publicación Especial 68 (1992): 241–255.
15. Herz N: “Timing of Spreading in the South Atlantic: Information from Brazilian Alkalic Rocks,” Geological Society of America Bulletin 88 (Enero de 1977): 101–112.
16. Coutinho JMV: “Dyke Swarms of the Parana Triple Junction, Southern Brazil (Enxame de Diques da Juncao Triplice do Parana, Brasil Meridional),” Geologia USP, Serie Científica 8, no. 2 (Octubre de 2008): 29–52.
> Frente de un acantilado en el Cañón de Fortaleza en Brasil. Los volúmenes masivos de magma que fluyeron desde las trampas del Paraná se ponen de manifiesto a través de la distribución de las gruesas capas de basalto, dacita y riolita que forman escarpas diferenciadas. El espesor de estas coladas se refleja en esta exposición de 700 m [2 300 pies], situada en el Parque Nacional de Serra Geral del Estado de Río Grande do Sul. (Fotografía, cortesía de Marcelo Frydman.)
Oilfield ReviewAutumn 10PreSalt Fig. 6ORAUT10-Prslt Fig. 6
dorsal que anunció la separación entre América del Sur y África. Esto finalmente generó una apertura para el incipiente océano Atlántico Sur, conforme los protocontinentes se separaron diacrónica-mente, comenzando en el sur y desplazándose hacia el norte.18 Esta apertura del océano de tipo cremallera se reflejaría finalmente en la presen-cia de acumulaciones salinas de mayor espesor en las cuencas meridionales.
Si bien la energía termal impulsó los procesos de levantamiento, rift y deriva, también creó el marco para la formación de las cuencas presali-nas. La contracción termal produjo el colapso y la subsidencia de los domos corticales, lo que oca-sionó la presencia de depresiones suaves en la corteza. El relleno de carbonatos y clásticos de estas cuencas de hundimiento térmico es respon-sable del auge petrolero actual.
17. Hawkesworth CJ, Gallagher K, Kelley S, Mantovani M, Peate DW, Regelous M y Rogers NW: “Parana Magmatism and the Opening of the South Atlantic,” en Storey BC, Alabaster T y Pankhurst RJ (eds): Magmatism and the Causes of Continental Break-Up. Londres: Sociedad Geológica, Publicación Especial 68 (1992): 221–240.
18. Mohriak WU y Rosendahl BR: “Transform Zones in the South Atlantic Rifted Continental Margins,” en Storti F, Holdsworth RE y Salvini F (eds): Intraplate Strike-Slip Deformation Belts. Londres: Sociedad Geológica, Publicación Especial 210 (2003): 211–228.

34 Oilfield Review
Entre las edades Berriasiano a Aptiano Temprano del Cretácico Temprano se produjeron tres episodios de rifting (arriba). Cada uno de esos episodios formó una serie de cuencas paralelas a los márgenes de las placas, cerca de la línea de costa actual. Desarrolladas inicialmente sobre el nivel del mar, estas cuencas se convirtieron en lagos al relle-narse con agua dulce. Pero además se rellenaron con sedimentos volcánicos y sedimentos continen-tales; los ingredientes esenciales para las rocas madre, generadoras de hidrocarburos.
Al ensancharse y hundirse estas cuencas lacustres, se produjo la intrusión gradual de las aguas oceánicas y algunos lagos se volvieron salo-bres debido al incremento de la salinidad. Las condiciones existentes en estos lagos dieron ori-gen a altos niveles de productividad orgánica y se tornaron favorables para la preservación de material orgánico.19 Los sedimentos lacustres de esta edad forman la roca generadora principal en gran parte de Brasil.
Las condiciones existentes en el sistema de lagos-rift fueron igualmente favorables para la depositación de rocas yacimiento. La separación continental continuó con el tiempo, como lo hicie-ron los episodios de intrusión de agua de mar. Y el agua de mar rellenó intermitentemente los lagos, inundando las regiones bajas del valle de rift en
lenta expansión. Estas condiciones generaron un ambiente de alta salinidad y baja energía, favorable para el crecimiento de colonias de cianobacterias.
Las colonias de algas unicelulares y otros microbios producen exopolímeros que son segrega-dos como una biopelícula.20 La biopelícula atrapa y cementa los granos sedimentarios formando capas
de acreción que luego conforman matas de micro-bialitas. Los microbios presentes en la porción superior de la mata necesitan la luz del sol para la fotosíntesis y estimulan el crecimiento ascendente, dando origen a una forma laminar en domo, deno-minada estromatolito. La distribución de estos microbios productores de carbonatos es afectada
19. Katz BJ y Mello MR: “Petroleum Systems of South Atlantic Marginal Basins—An Overview,” en Mello MR y Katz BJ (eds): Petroleum Systems of South Atlantic Margins. Tulsa: The American Association of Petroleum Geologists, Memoria 73 de la AAPG (2000): 1–13.
20. Los microbios y las bacterias prosperan en una amplia gama de ambientes y son responsables no sólo de la generación de la roca yacimiento, sino también de la generación de problemas de producción.
Para obtener más información, consulte: Bass C y Lappin-Scott H: “The Bad Guys and the Good Guys in Petroleum Microbiology,” Oilfield Review 9, no. 1 (Primavera de 1997): 17–25.
21. Los estromatolitos modernos pueden encontrarse en lagos hipersalinos, lagunas marinas e incluso en lagos de agua dulce, siempre que las condiciones no favorezcan a los organismos de pastoreo o los organismos excavadores que afectan adversamente la preservación de los estromatolitos. Entre algunos ejemplos modernos se encuentran la Bahía de Shark, en Australia Occidental, y Lagoa Salgada, en Río de Janeiro. Los estromatolitos de agua dulce se encuentran en el Lago Salda, en Turquía, y en el Lago Pavilion, en Columbia Británica, Canadá.
22. Asmus HE y Baisch PR: “Geological Evolution of the Brazilian Continental Margin,” Episodes no. 4 (1983): 3–9, http://www.episodes.org/backissues/64/ARTICLES--3. pdf (Se accedió el 27 de septiembre de 2010).
23. La evaporación y la circulación restringida son claves para la depositación de la sal. Esto queda demostrado
a través de los cuerpos de agua altamente salinos, tales como el Mar Muerto y el Gran Lago Salado que no poseen salida. Al no tener influjo de agua de mar, su salinidad es producto de la evaporación que sirve para concentrar las sales aportadas a través de los tributarios de agua dulce. La sal es depositada a medida que las aguas se supersaturan.
24. Para obtener más información sobre la perspectiva africana acerca del proceso de separación, consulte: Platt N, Philip P y Walter S: “Going for the Play: Structural Interpretation in Offshore Congo,” Oilfield Review 5, no. 1 (Enero de 1993): 14–27.
25. Liro LM y Dawson WC: “Reservoir Systems of Selected Basins of the South Atlantic,” en Mello MR y Katz BJ (eds): Petroleum Systems of South Atlantic Margins. Tulsa: The American Association of Petroleum Geologists, Memoria 73 de la AAPG (2000): 77–92.
26. El concepto de aguas profundas evolucionó a lo largo de los años. Originalmente, el área de aguas profundas se definía para tirantes de agua de 200 m [656 pies]. Esta marca fue eclipsada posteriormente por las tendencias de perforación de la industria y ahora el estándar de aguas profundas se fija en 305 m [1 000 pies]. Los tirantes de agua de más de 1 524 m [5 000 pies] se consideran ultraprofundos.
27. de Luca JC: “Brazilian Petroleum Exploration and Production: From Monopoly to Free Market,” artículo OTC 15051, presentado en la Conferencia de Tecnología Marina, Houston, 5 al 8 de mayo de 2003.
28. de Luca, referencia 27.
> Del rift a la deriva. El desarrollo de las cuencas salinas se produjo gradualmente, a medida que el rifting entre América del Sur y África Occidental se convirtió también de manera gradual en un proceso de deriva, en todo el sentido del término. Hace aproximadamente 150 millones de años, la formación de fallas de extensión y la subsidencia eran procesos activos en el supercontinente de Gondwana. El estiramiento y la extensión posteriores, producidos en el Cretácico Temprano, condujeron a la formación de rifts de gran escala a lo largo de los márgenes futuros del oeste de África y el este de Brasil (izquierda). Para el Aptiano, la persistencia de la subsidencia y el ascenso del nivel global del mar permitieron la incursión del mar (centro). Al principio, esto se producía en forma intermitente y el mar ingresaba y se evaporaba de las cuencas en forma alternada, creando depósitos evaporíticos de gran espesor. Posteriormente, el área quedó completamente sumergida cuando el desmembramiento continental de Gondwana condujo a la separación, o deriva, entre América del Sur y África. Si bien las cuencas se habían vinculado previamente sobre una placa continental, la expansión creciente del océano las separó cuando la inyección de la nueva corteza oceánica en la dorsal medio-oceánica produjo la apertura del Atlántico (derecha). Se registró un predominio de sedimentación marina, con depósitos de caliza, arenisca y lutita de gran espesor. (Adaptado de Platt et al, referencia 24.)
Oilfield ReviewAutumn 10PreSalt Fig. 7ORAUT10-Prslt Fig. 7
Hace 150-120 millones de años
Escudo de África Occidental
Río C
ongo
Río A
mazon
as
Hace 120-110 millones de años
Fosa
deBe
nue
Dorsal deWalvis
Cuencadel Paraná
Hace 110 millones de años
Dorsa
l de W
alvis
Elevación deRío Grande
Dorsalmed io-oceánica

Volumen 22, no. 3 35
por factores ambientales, tales como la luz solar, la temperatura del agua y la turbidez, además de la depredación causada por los organismos de pasto-reo.21 Estos crecimientos microbianos se litifican con el tiempo, para convertirse luego en las rocas yacimiento del play presalino.
Las cuencas marginales se hundieron a medida que las placas continentales continuaron sepa-rándose. La actividad volcánica generada por las plumas convectivas a lo largo de los rasgos corti-cales del Lineamiento de Florianópolis, en la placa tectónica de América del Sur, y de la Dorsal de Walvis en la placa Africana, formó barreras que restringieron la circulación marina en el océano Atlántico Sur en proceso de expansión.22
Durante el Cretácico Temprano, las aguas mari-nas se desbordaron esporádicamente más allá de estas barreras y quedaron atrapadas en las cuencas en proceso de subsidencia. Bajo las condiciones cli-máticas áridas del Aptiano, estas aguas entrampa-das se evaporaron y dejaron depósitos salinos de gran espesor en las cuencas de los márgenes de América del Sur y África.23 Los depósitos evaporíti-cos cubrieron los sedimentos de la secuencia de rift precedente, formando un sello efectivo para los hidrocarburos que finalmente migrarían hacia la roca yacimiento microbialítica. Los depósitos sali-nos del Aptiano señalan la fase evaporítica transi-cional de la evolución del margen continental que precedió al período de deriva en estas cuencas.
Para el Cretácico Medio a Tardío, la etapa de rifting había concluido y los continentes de África y América del Sur se separaron aún más con la inyec-ción de nueva corteza oceánica en la dorsal medio-oceánica.24 A lo largo del margen de Brasil, y en condiciones de ambiente marino abierto, se desa-rrollaron plataformas carbonatadas que crecieron a lo largo del margen opuesto, entre Gabón y Angola, durante el Albiano.25 Con la persistencia de la subsi-dencia, estas plataformas se inundaron y finalmente se cubrieron con clásticos durante el Cretácico Tardío y el Terciario.
Paso a pasoPaso a paso, los horizontes exploratorios de Brasil se expandieron en busca de nuevas áreas prospectivas; pasando de tierra firme a las áreas marinas, y luego de aguas someras a aguas pro-fundas y ultraprofundas.26 El desarrollo de cada play generó nuevas formas de pensar acerca de la geología local y regional, además de nuevas respuestas a los desafíos planteados por las ope-raciones de perforación y producción.
Como sucede en muchos países, la presencia de manifestaciones superficiales de petróleo esti-muló la ejecución de las primeras actividades de
exploración. Uno de los primeros pozos de Brasil, perforado en la década de 1890 cerca de una manifestación superficial de petróleo en Bofete, San Pablo, alcanzó una profundidad total de 488 m [1 601 pies].27 Su producción fue de tan sólo dos barriles de petróleo; un presagio de los resultados de las actividades de exploración que se desarro-llarían durante las cuatro décadas siguientes. Para fines de la década de 1930, los organismos guber-namentales y las compañías de exploración priva-das habían perforado más de 80 pozos; con resultados sistemáticamente decepcionantes.
No obstante, en 1937, el Departamento Nacional de Producción Mineral (DNPM) comenzó a explo-rar la cuenca de Recôncavo; parte de un rift abor-tado situado en el noreste del Estado de Bahía. En 1939, un descubrimiento de petróleo registrado en el pozo DNPM 163 del campo Lobato dio origen a la industria petrolera nacional de Brasil. Si bien no fue comercial, este pozo instó la ejecución de acti-vidades exploratorias adicionales en la cuenca, y para el año 1941, se perforó el primer descubri-miento comercial cerca de Candeias. En la cuenca de Recôncavo, se han descubierto más de 80 cam-pos de petróleo y gas.
La exploración a lo largo de la tendencia de rift condujo a Petrobras a la cuenca Sergipe. En esa cuenca, en el año 1963, la compañía descubrió el primer campo petrolero gigante de la nación en Carmópolis, lo que instó la ejecución de un exa-
men minucioso de otras cuencas costeras de tie-rra firme. Desde entonces, se revelaron numerosos plays a través de todas las cuencas terrestres de Brasil. La expansión de las actividades de explora-ción dentro de cada cuenca, junto con el mejora-miento de la tecnología sísmica, está ayudando a los geocientíficos a descubrir más realidades de la historia geológica de la región; tanto en tierra firme como en las áreas marinas.
La década de 1960 también fue testigo de la implementación de esfuerzos concertados para explorar las aguas someras de la Plataforma Continental de Brasil. Tras un programa de adquisición gravimétrica y sísmica, implemen-tado en 1967, Petrobras comenzó a perforar las secuencias deltaicas presentes en el área marina del Estado de Espíritu Santo.28 El primer pozo de la compañía, en la cuenca de Espíritu Santo, demostró ser un pozo seco. Luego, Petrobras se desplazó hacia el norte, a la cuenca Sergipe-Alagoas, y en 1968 realizó el primer descubri-miento marino frente a las costas del delta del río São Francisco en el campo Guaricema. Perforado en un tirante de agua (profundidad del lecho marino) de 30 m [98 pies], frente a la costa del Estado de Sergipe, este pozo confirmó la existen-cia de petróleo debajo de la Plataforma.
Para el año 1971, Petrobras había comenzado a explorar la cuenca de Campos, frente a la costa sudeste de Brasil (arriba). Luego de una serie de
> El marco para un nuevo play. Desde la década de 1970, la cuenca de Campos produjo la mayor parte de los recursos de petróleo y gas de Brasil. El advenimiento del play presalino está generando gran interés en la cuenca de Santos, si bien las cuencas de Campos y Espirito Santo también alojan áreas prospectivas presalinas.
Oilfield ReviewAutumn 10PreSalt Fig. 8ORAUT10-Prslt Fig. 8
Cuenca de Santos
Cuenca de Campos
Vitoria
Río de Janeiro
Estado de
Río de JaneiroJubarte
RoncadorAlbacora
BarracudaMarlim
Alto de Abrolhos
Alto de Vitoria
Alto de Cabo Frío
Alto de Florianópolis0
0 km
200millas
200
Estado de San Pablo
San Pablo
Estado deMinas Gerais
B R A S I L
Cuenca deEspíritu Santo
Esta
do d
e Es
pírit
u Sa
nto

36 Oilfield Review
pozos secos, en el año 1974 la compañía efectuó el primer descubrimiento en esta cuenca. Mediante la ejecución de perforaciones en tiran-tes de agua de 120 m [394 pies], el noveno pozo exploratorio marino de Petrobras encontró una zona productiva en los carbonatos de edad Albiano del campo Garoupa. Este hallazgo abrió el camino para la exploración intensiva de la cuenca de Campos. Si bien los objetivos de explo-ración iniciales eran los carbonatos de edad Albiano, limitados principalmente a la Plataforma externa, se realizaron descubrimientos más gran-des en los yacimientos de areniscas terciarias, en tirantes de agua de más de 500 m [1 640 pies].29
Al año siguiente, se efectuó un descubri-miento importante en un tirante de agua de 166 m [545 pies]. El campo Namorado, con 39,7 millo-nes de m3 [250 millones de bbl], fue el primero de una serie de yacimientos de turbiditas clásti-cas que se perforó en la cuenca de Campos. Mediante la expansión de la experiencia opera-tiva en el área, Petrobras logró refinar los mode-los sedimentológicos y estratigráficos del margen continental, y para mediados de la década de 1980, la compañía estaba apuntando como objetivo a los yacimientos de turbiditas siliciclásticas mari-nas profundas, correspondientes a un ambiente de prodelta.30 Cuatro campos turbidíticos gigantes a supergigantes fueron descubiertos en aguas cada vez más profundas:31
•1984: El campo Albacora, perforado en untirante de agua de 293 m [961 pies]
•1985:ElcampoMarlim,perforadoenuntirantede agua de 853 m [2 799 pies]
•1989: El campo Barracuda, perforado en untirante de agua de 980 m [3 215 pies]
•1996: El campo Roncador, perforado en untirante de agua de 1 853 m [6 079 pies].
Para el año 2007, en la cuenca de Campos se habían perforado más de 1 100 pozos, lo que se tradujo en el descubrimiento de más de 50 cam-pos. Estas cifras contrastan fuertemente con las campañas de exploración llevadas a cabo en la cuenca adyacente, situada al sur. A comienzos del año 2007, en la cuenca de Santos sólo se habían perforado unos 115 pozos.
Estos pozos dieron como resultado un puñado de campos que incluyeron numerosos descubri-mientos significativos. Petrobras perforó el pri-mer pozo de exploración de la cuenca de Santos en 1970, pero resultó seco. En 1984, Pecten Brazil, afiliada de Shell Oil, se convirtió en la primera compañía que descubrió un campo de gas durante las operaciones de perforación llevadas a cabo en las aguas someras de la cuenca. Luego de perforar dos pozos secos, Pecten descubrió una zona pro-ductiva de turbiditas en el campo Merluza, perfo-rado en un tirante de agua de 131 m [430 pies]. En 1988, Petrobras perforó un pozo descubridor en el campo Tubarão, en un tirante de agua de 143 m [470 pies]. Un tercer campo, Estrela do Mar, fue perforado en 1990.32 Luego siguieron los campos Coral y Caravela, que producen de las calizas oolíticas de edad Albiano, depositadas por encima de una capa de sal.33
En el año 2000, Petrobras desplazó el enfoque centrado en su cuenca de Santos, a las aguas pro-fundas y ultraprofundas. Esto condujo al descu-brimiento del campo Mexilhão, que es el campo de gas natural más grande de Brasil. Otros cam-pos de gas, en Tambaú y Pirapitanga, además de los campos de petróleo de Carapiá y Tambuatá, fueron descubiertos en las turbiditas del Cretácico Tardío. Las turbiditas del Eoceno también dieron lugar a descubrimientos de petróleo pesado en el
campo Tambuatá y en el campo Atlanta operado por Shell.34 Las turbiditas del campo Uruguá pro-dujeron petróleo de densidad API intermedia.
Aproximadamente en esta época, Petrobras adquirió y procesó un gran conjunto de datos sísmi-cos 3D para ayudar a los geocientíficos a compren-der mejor las estructuras profundas y la estratigrafía de la cuenca de Santos (arriba).35 Una vez definidas las facies sísmicas, Petrobras pudo apuntar como objetivo a la sección presalina de la Meseta de San Pablo en la cuenca de Santos.36
En el año 2006, Petrobras y sus socios, BG Group y Galp Energía, descubrieron la acumula-ción presalina gigante de petróleo en Tupi, en un yacimiento a una profundidad promedio de 5 485 m [18 000 pies] por debajo de la superficie del océano. El petróleo de 28º API, hallado en las zonas presalinas, es más liviano y más dulce que el crudo pesado que domina la mayor parte de la producción postsalina de Brasil.
En agosto de 2007, Petrobras anunció el alcance de la frontera de exploración más reciente, definida por el play presalino. Según las evaluaciones de 15 pozos presalinos, esta frontera cubre un área de 800 km [497 millas] de largo por 200 km [124 millas] de ancho que abarca las cuencas de Espíritu Santo, Campos y Santos.37 Después del campo Tupi, numerosos des-cubrimientos presalinos fueron anunciados en la cuenca de Santos, incluidos los de Caramba, Carioca, Iara y Guará.38 En el año 2009, Petrobras comunicó además su plan estratégico para el desa-rrollo de los campos Tupi, Iara y Guará, en tres fases discretas, comenzando con las pruebas exten-didas de pozos, siguiendo luego con la implementa-ción de proyectos piloto, y por último la etapa de producción en gran escala a través de sistemas flo-
> Geología de la cuenca de Santos. Las rocas generadoras presalinas y los yacimientos carbonatados suprayacentes están siendo considerados como objetivos, por debajo de la gruesa capa de evaporitas. (Adaptado de Modica y Brush, referencia 35.)
Oilfield ReviewAutumn 10PreSalt Fig. 8AORAUT10-Prslt Fig. 8A
Tiem
po d
e trá
nsito
dob
le (i
da y
vue
lta),
segu
ndos
Formaciones presalinas
Basamento
Plataforma continentalPendiente (talud) continental
Hemigrábenes
Evaporitas
km
millas 25
0
0
25
NO SE0
2
4
6
8
10
Meseta deSan Pablo
Evaporitas
Formaciones postsalinas
Oligoceno Tardío-Neógeno
Paleoceno-Eoceno
CampanianoTardío-MaestrichtianoCenomaniano-CampanianoMedio
Albiano
Aptiano
Neocomiano-Barremiano
Formaciones presalinas

Volumen 22, no. 3 37
tantes de producción, almacenamiento y descarga (FPSO).39 El modelo presalino de la cuenca de Santos ha sido adaptado para la exploración de otras cuencas, y se han realizado descubrimientos importantes en los campos Caxaréu, Pirambu, Baleia Franca, Baleia Azul, Jubarte y Cachalote de la cuenca de Campos. También se apunta a la sec-ción presalina de la cuenca de Espíritu Santo con fines de exploración.
Los desafíos futurosLa cuenca de Santos, el sitio inicial de los descubri-mientos presalinos recientes realizados en Brasil, plantea numerosos desafíos de E&P, propios de un ambiente en el que las aguas ultraprofundas cubren un yacimiento carbonatado profundo oculto por
una capa de sal de gran espesor.40 El foco de la explo-ración, el agrupamiento presalino, se encuentra ubicado en tirantes de agua de entre 1 900 y 2 400 m [6 200 y 7 870 pies] (arriba). Desarrolladas a unos 300 km [185 millas] de la costa, las activida-des en el agrupamiento presalino son dirigidas mediante un proceso logístico coordinado de manera exhaustiva, que asegura el arribo de los equipos y las brigadas a la localización cuando se necesitan.41 Existe la posibilidad de que los pro-blemas asociados con la distancia a la costa se exacerben, debido a las condiciones metoceáni-cas que pueden variar de moderadas a severas: las olas en la cuenca de Santos alcanzan una altura muy superior a la de las olas experimenta-das en la cuenca de Campos al norte; llegando a
ser un 40% más altas.42 Esto agrega una dimen-sión significativa a cada misión marina; desde el cambio de brigada hasta el suministro del equipo de perforación, y desde la manipulación del ancla hasta el tendido de las tuberías. El rol logístico cobrará aún más importancia cuando se instalen las líneas de conducción, las plataformas, los sis-temas FPSO y la infraestructura asociada para soportar la producción.
En estas aguas, los equipos de exploración y producción se basan en gran medida en los datos geofísicos para hallar estructuras promisorias y, posteriormente, como asistencia en la caracteri-zación de yacimientos. No obstante, el proceso de generación de imágenes por debajo de la sal puede ser problemático. A fin de obtener los des-plazamientos necesarios para generar con éxito imágenes de las estructuras que yacen por debajo de la sal, se están utilizando estrategias de adqui-sición avanzadas que emplean métodos tales como las técnicas de cobertura azimutal amplia, rica y múltiple.43
El procesamiento también puede ser compli-cado. El alto contraste de velocidad sísmica, exis-tente entre la sal y los sedimentos, genera problemas para los métodos convencionales de migración en el tiempo, por lo que son preferibles las técnicas de migración en profundidad. Estos algoritmos de generación de imágenes requieren modelos de velocidad precisos de las estructuras que se encuentran por encima, en el interior y por debajo de la sal. Con la adaptación de la tec-nología electromagnética (EM) para los ambien-tes de aguas profundas, ahora los equipos de exploración están integrando los datos EM con los datos sísmicos.44 La inversión conjunta de los datos EM y los datos sísmicos es clave para mejo-rar la resolución estructural y localizar las reser-vas de hidrocarburos con una precisión que no sería posible de otro modo.
29. Katz and Mello, referencia 19.30. Carminatti M, Dias JL y Wolff B: “From Turbidites to
Carbonates: Breaking Paradigms in Deep Waters,” artículo OTC 20124, presentado en la Conferencia de Tecnología Marina, Houston, 4 al 7 de mayo de 2009.
31. Un campo petrolero gigante es aquel cuyas reservas exceden 1 000 millones de barriles; un campo supergigante excede 5 000 millones de barriles.
32. “Petrobras Role in Brazil’s Economy Disputed,” Oil & Gas Journal 89, no. 2 (14 de enero de 1991), http://www.ogj. com/index/article-tools-template/_saveArticle/articles/oil-gas-journal/volume-89/issue-2/in-this-issue/general-interest/petrobras-role-in-brazil39s-economydisputed.html (Se accedió el 16 de julio de 2010).
33. Carminatti et al, referencia 30.34. Carminatti et al, referencia 30.
> Agrupamiento presalino de la cuenca de Santos. El pozo del campo Tupi, RJS-628A, constituye el primer descubrimiento importante del agrupamiento presalino y fue seguido por al menos otros siete realizados en los bloques de la concesión del agrupamiento.
Oilfield ReviewAutumn 10PreSalt Fig.9ORAUT10-Prslt Fig.9
0
0 km
200millas
200Cuenca de Santos
Río de Janeiro
BM-S-9Carioca
BM-S-10Parati
BM-S-8Bem-Te-Vi
BM-S-21Caramba
BM-S-11Tupi
BM-S-11Iara
BM-S-24Júpiter
BM-S-9Guara
San Paulo
B R A S I L
35. Para obtener más información sobre la estratigrafía de la cuenca de Santos, consulte: Modica CJ y Brush ER: “Postrift Sequence Stratigraphy, Paleogeography, and Fill History of the Deep-Water Santos Basin, Offshore Southeast Brazil,” AAPG Bulletin 88, no. 7 (Julio de 2004): 923–945.
36. Carminatti et al, referencia 30. 37. Petrobras News Agency: “Petrobras Discovers Brazil’s
Biggest Oil-Bearing Area,” (11 de agosto de 2007), http://www.agenciapetrobrasdenoticias.com.br/ en_materia.asp?id_editoria=8&id_noticia=4042 (Se accedió el 27 de septiembre de 2010).
38. Administración de Información de Energía de EUA, Country Analysis Briefs: “Brazil Energy Data, Statistics and Analysis,” (Septiembre de 2009), http://www.eia.doe.gov/cabs/Brazil/Oil.html (Se accedió el 23 de julio de 2010).
39. Administración de Información de Energía de EUA, referencia 38.
40. Beltrao et al, referencia 1.
41. Formigli Filho JM, Pinto ACC y de Almeida AS: “Santos Basin’s Pre-Salt Reservoirs Development—The Way Ahead,” artículo OTC 19953, presentado en la Conferencia de Tecnología Marina, Houston, 4 al 7 de mayo de 2009.
42. Beltrao et al, referencia 1.43. Para obtener más información sobre estas técnicas de
adquisición, consulte: Buia M, Flores PE, Hill D, Palmer E, Ross R, Walker R, Houbiers M, Thompson M, Laura S, Menlikli C, Moldoveanu N y Snyder E: “Levantamiento sísmicos en círculos,” Oilfield Review 20, no. 3 (Invierno de 2008/2009): 20–35.
44. Para obtener más información sobre la tecnología EM, consulte: Brady J, Campbell T, Fenwick A, Ganz M, Sandberg SK, Buonora MPP, Rodrigues LP, Campbell C, Combee L, Ferster A, Umbach KE, Labruzzo T, Zerilli A, Nichols EA, Patmore S y Stilling J: “Sondeos electromagnéticos para la exploración de petróleo y gas,” Oilfield Review 21, no. 1 (Septiembre de 2009): 4–19.

38 Oilfield Review
Entre los desafíos más intimidantes se encuen-tra la construcción de pozos. Inmediatamente por encima del yacimiento objetivo yacen 2 000 m de evaporitas. La composición variable del intervalo evaporítico puede ser especialmente difícil de perforar. Esta sección, compuesta principalmente por halita [NaCl] y anhidrita [CaSO4], contiene además capas de carnalita [KMgCl3•6H2O] y de taquihidrita [CaMg2Cl6•12H2O]. Cada capa se caracteriza por la existencia de una velocidad de
deslizamiento diferente, que puede variar hasta en dos órdenes de magnitud entre los diversos tipos de sal. El deslizamiento puede producir restricciones en el pozo, atascamiento de la tubería y falla de la tubería de revestimiento (izquierda).45
Por otro lado, los yacimientos presalinos están compuestos por carbonatos estratificados heterogéneos que pueden afectar adversamente el avance de la perforación. El desempeño de las operaciones de perforación siempre constituye una de las inquietudes principales del ámbito de aguas ultraprofundas, en el que los equipos de perforación imponen altas tarifas diarias. La capacidad para mejorar dicho desempeño inci-dirá en los proyectos de perforación de alcance extendido, que pueden ser requeridos para desa-rrollar estos yacimientos en el futuro.46
La geomecánica desempeñará un rol impor-tante en los planes de desarrollo futuros. Los estudios geomecánicos ayudan a anticipar las posibilidades de que se produzca el hundimiento de las rocas o la deformación de la sal alrededor del pozo y pueden asistir en la selección de las barrenas y los fluidos de perforación. Estos estu-dios serán esenciales para la concepción de los programas de inyección, entubado y cementa-ción, destinados a prolongar la longevidad de los pozos en condiciones de tanta hostilidad.
Finalmente, una de las claves para la produc-ción radica en la caracterización petrofísica del yacimiento carbonatado presalino. Si bien los descubrimientos presalinos despertaron interés en los yacimientos carbonatados lacustres, aún persisten brechas significativas en el conoci-miento que posee la industria acerca de los ambientes depositacionales y los procesos diage-néticos subsiguientes. La porosidad inicial en los depósitos lacustres es altamente variable. En todo el mundo, las formaciones de microbialitas
a menudo requieren un proceso de porogénesis, o de mejoramiento diagenético, para formar yaci-mientos de petróleo adecuados. En los yacimien-tos lacustres, se considera que las redes de fallas y fracturas proveen trayectos para el suministro de los fluidos que favorecen los procesos diagené-ticos, en especial la disolución, que pueden mejo-rar la calidad del yacimiento a través de la conexión de las redes de porosidad vacuolar.47 En los pozos de exploración y de evaluación, se obtie-nen datos derivados del análisis de núcleos, junto con un conjunto extensivo de mediciones deriva-das de los registros para evaluar parámetros tales como la mojabilidad, la conectividad hidráulica, la estructura de poros y la permeabilidad.
La caracterización exhaustiva del yacimiento es necesaria para definir las mejores geometrías y esquemas de terminación de pozos. En la mayoría de los pozos presalinos, la presencia de una columna de petróleo de gran espesor y la hetero-geneidad del yacimiento indican la necesidad de efectuar terminaciones selectivas. También es conveniente un tratamiento de estimulación ácida planificado cuidadosamente para distribuir la producción en forma más uniforme a través de la zona productiva.
Las operaciones de producción o inyección pue-den producir cambios en los esfuerzos y en los flui-dos dentro de un campo. Los cambios producidos en la presión efectiva también pueden afectar las res-puestas observadas durante los levantamientos sís-micos 4D subsiguientes. Dado que la respuesta sísmica 4D puede ser sutil y difícil de detectar en los carbonatos, es necesario contar con medicio-nes sísmicas altamente precisas y sensibles. Una vez que los cambios han sido medidos con preci-sión, los modelos geomecánicos del subsuelo asis-tirán en la predicción de cómo estos cambios podrían incidir en las respuestas sísmicas y el desempeño del yacimiento en el futuro.
> Problemas de perforación potenciales. La perforación a través de la sal requiere especial atención en los fluidos de perforación. Entre los problemas potenciales se encuentran tramos ensanchados del pozo y debilitamiento de las paredes, como resultado de la lixiviación de la sal. La baja densidad del lodo puede permitir que los resaltos formados por el escurrimiento de la sal impacten la sarta de perforación. Los fluidos de perforación contaminados con sal de la formación pueden desarrollar propiedades reológicas desfavorables que reducen la capacidad del lodo para acarrear los recortes a la superficie, haciendo que la sarta de perforación se obture por encima de la barrena. (Tomado de Pérez et al, referencia 45.)
Problemas de perforación potenciales
Sal
La relajación de los esfuerzosradiales puede ocasionar elcolapso del pozo
Los resaltos formados por elescurrimiento de la salimpactan en la sarta deperforación
La pared del pozo se debilitapor el lixiviado del agua, elgas y otros minerales fuerade la sal
El ensanchamiento del pozoes el resultado de ladisolución de la sal
Los recortes acumuladosatascan la sarta de perforación
Postsalino
Oilfield ReviewAutumn 10PreSalt Fig. 10ORAUT10-Prslt Fig. 10
45. Para obtener más información sobre las operaciones de perforación a través de la sal, consulte: Perez MA, Clyde R, D’Ambrosio P, Israel R, Leavitt T, Nutt L, Johnson C y Williamson D: “Respondiendo al desafío de explotar estructuras subsalinas,” Oilfield Review 20, no. 3 (Invierno de 2008/2009): 36–52.
46. Alves I, Aragao A, Bastos B, Falcao J y Fartes E: “Pre-Salt Santos Basin—Well Construction Learning Curve Acceleration,” artículo OTC 20177, presentado en la Conferencia de Tecnología Marina, Houston, 4 al 7 de mayo de 2009.
Para obtener más información sobre la diagénesis, consulte: Ali SA, Clark WJ, Moore WR y Dribus JR: “La diagénesis y la calidad de los yacimientos,” Oilfield Review 22, no. 2 (Diciembre de 2010): 14–29.
47. Guidry SA, Trainor D, Helsing CE y Ritter AL: “Diagenetic Facies in Lacustrine Carbonates: Implications for Brazilian Pre-Salt Reservoirs,” (resumen) presentado en la Conferencia y Exhibición Internacional de la AAPG, Río de Janeiro, 15 al 18 de noviembre de 2009, http://www.searchanddiscovery.net/abstracts/html/2009/intl/abstracts/guidry.htm (Se accedió el 27 de septiembre de 2010).

Volumen 22, no. 3 39
> Dibujo conceptual del Centro de Investigación y Geoingeniería de Brasil. La nueva instalación, a ubicarse en el Parque Tecnológico de la Universidad Federal de Río de Janeiro, se centrará en numerosos proyectos relacionados con el ambiente presalino de aguas profundas.
Oilfield ReviewAutumn 10PreSalt Fig. 11ORAUT10-Prslt Fig. 11
Para superar estos y otros desafíos, los empren-dimientos presalinos necesitarán los conocimien-tos técnicos especiales y las capacidades de investigación de las compañías de servicios y del mundo académico. En septiembre de 2009, Schlumberger suscribió un acuerdo de colabora-ción conjunta con la Universidad Federal de Río de Janeiro para construir un centro internacional de investigaciones en el campus de la universidad (arriba). El Centro de Investigación y Geoingeniería de Schlumberger en Brasil (BRGC), como parte de la red global más vasta de investigación y desa-rrollo de Schlumberger, ha identificado cuatro áreas de concentración: caracterización de yaci-mientos carbonatados, generación de imágenes geofísicas 4D, construcción de pozos y geomecá-nica, e ingeniería de yacimientos. El centro BRGC admitirá un total de 350 personas y contendrá centros de última generación para actividades de visualización 3D, procesamiento de datos sísmi-cos, desarrollo de software y entrenamiento. Tres laboratorios totalmente integrados y especial-
mente diseñados proveerán datos empíricos de entrada para los modelos y las simulaciones utili-zadas para ayudar a los operadores a desarrollar una caracterización integral del yacimiento: •El Laboratorio de Investigación Regional de
Servicios al Pozo ofrece los equipos de cemen-tación y estimulación para las actividades de investigación destinadas a mejorar la produc-ción proveniente de las formaciones presalinas.
•ElLaboratoriodeNúcleosdeYacimientospro-vee el análisis de fluidos y núcleos para la inte-gración con los estudios geofísicos, petrofísicos y geomecánicos.
•El Laboratorio de Fluidos de Yacimientosofrece capacidades integradas de muestreo y análisis de fluidos bajo condiciones representa-tivas de fondo de pozo, para reducir la incerti-dumbre asociada con los datos en los proyectos de desarrollo complejos.
Las lecciones aprendidas en el centro de investigaciones podrán trasladarse a otras cuen-cas del mundo. Ya se reconoce que la geología y la
tectónica, previas al período de deriva, de las cuencas situadas a lo largo de la costa sudeste de América del Sur son similares en muchos senti-dos a las de las cuencas de la costa oeste de África. Cada costa posee cuencas de hundi-miento térmico que contienen rocas generadoras ricas en materia orgánica, cubiertas por capas de sal de gran espesor.
Si bien existen diferencias importantes entre las cuencas situadas en ambos márgenes del Atlántico, las experiencias adquiridas en uno están allanando el camino para la exploración en el otro, y algunos operadores están estableciendo una presencia en ambas costas. A lo largo de la costa de Brasil, esta experiencia está atrave-sando su período de repago, como lo demuestran los excelentes resultados de las pruebas extendi-das realizadas en un pozo de Tupi Sul. Este pozo produjo —a través del estrangulador— un pro-medio de 2 544 m3/d [16 000 bbl/d] durante el último año y medio, demostrando el potencial real de este nuevo play de Brasil. —MV

40 Oilfield Review
Objetos grandes en paquetes pequeños
Muchas industrias están desarrollando diversos métodos para explotar el potencial
de los objetos nanoescalares y producirlos en serie. La nanotecnología también
podría revolucionar las áreas clave de la recuperación de hidrocarburos.
No obstante, los éxitos de otras industrias a menudo se han registrado en condiciones
que distan considerablemente de las duras realidades de los ambientes de los campos
petroleros. Ahora, se están llevando a cabo actividades de investigación para
resolver los desafíos específicos de E&P, lográndose avances en diversas áreas.
Andrew R. BarronJames M. TourUniversidad de RiceHouston, Texas, EUA
Ahmed A. BusnainaYung Joon JungSivasubramanian SomuUniversidad del NoresteBoston, Massachusetts, EUA
Mazen Y. KanjSaudi AramcoDhahran, Arabia Saudita
David PotterUniversidad de AlbertaEdmonton, Alberta, Canadá
Daniel ResascoUniversidad de OklahomaNorman, Oklahoma, EUA
John UlloConsultorSudbury, Massachusetts
Traducción del artículo publicado en Oilfield Review, Otoño de 2010: 22, no. 3.Copyright © 2011 Schlumberger.Por su colaboración en la preparación de este artículo, se agradece a Hélène Berthet, del Centro de Productos Riboud de Schlumberger en Clamart, Francia; y a Tancredi Botto y Joyce Wong, del Centro de Investigaciones Doll de Schlumberger en Cambridge, Massachusetts.
Imaginemos un yacimiento infiltrado con disposi-tivos que pudieran informar su localización ade-más de las propiedades de los fluidos que los rodean. O sensores diminutos capaces de identi-ficar contactos agua-petróleo y ser localizados mediante métodos de detección en la superficie. No se trata de meros sueños improbables, sino de las metas a largo plazo de los grupos de investiga-ción que se dedican a investigar las nanotecnolo-
gías para la industria del petróleo y el gas. No obstante, la nanotecnología aún transita sus pri-meras etapas y es probable que hasta su mera descripción genere discusiones y debates.
Las nanopartículas pueden encontrarse por ejemplo en el enlozado de la cerámica antigua, pero ese uso inadvertido de las nanoestructuras dista mucho de la compleja ciencia de la nano-tecnología, que se sustenta en la investigación, el
1. Para conocer uno de los primeros análisis reconocidos sobre las actividades de investigación en materia de nanoescalas, consulte: Feynman RP: “There’s Plenty of Room at the Bottom: An Invitation to Enter a New World of Physics,” transcripciones de la charla realizada en la Reunión Anual de la Sociedad Física Americana de 1959, publicada por primera vez en Engineering & Science (Febrero de 1960), http://www.zyvex.com/nanotech/feynman.html (Se accedió el 26 de julio de 2010).
2. A los fines comparativos, los nanocristales pueden medir tan sólo 10 nm; un glóbulo rojo humano mide aproximadamente 5 000 nm. Para obtener más información sobre la nanotoxicología de campos petroleros, consulte: Nabhani N y Tofighi A: “The Assessment of Health, Safety and Environmental Risks of Nanoparticles and How to Control Their Impacts,” artículo SPE 127261, presentado en la Conferencia Internacional de la SPE sobre Salud, Seguridad y Medio Ambiente en la Exploración y la Producción de Petróleo y Gas, Río de Janeiro, 12 al 14 de abril de 2010.
3. Su MY y Mirin RP: “Enhanced Light Extraction from Circular Bragg Grating Coupled Microcavities,” Applied Physics Letters 89, no. 3 (17 de julio de 2006): 033105.
Oilfield ReviewAutumn 10Nanotech Fig. OpenerORAUT10-Nano Fig. Opener

Volumen 22, no. 3 41
10
CBGCanaleta
Capa DBR
2
µm
a = 525 nma = 360 nmHíbrido a = 180, 360 nmHBLED estándar
10
8
6
4
2
0
12
1 080
Intensidad normalizada
Long
itud
de o
nda,
nm
1 100 1 120 1 140 1 160 1 180 1 200
Paso degraduación, a
Oilfield ReviewAutumn 10Nanotech Fig. 1ORAUT10-Nano Fig. 1
µm
desarrollo y la manufactura. Los científicos han teorizado sobre las nanoestructuras durante más de medio siglo, pero recién en la década de 1980 fue posible construir físicamente lo que se imagi-naba.1 Además del estudio de los materiales a nanoescala, la nanotecnología abarca el desarro-llo de herramientas para crear, observar y mani-pular las nanoestructuras experimentalmente y, por último, a niveles de producción en serie.
Por otro lado, los científicos deben estudiar y definir con cuidado las propiedades físicas de los nanomateriales recién creados para utilizarlos de manera segura y efectiva. Dichas evaluaciones se necesitan especialmente cuando los nanoma-teriales se construyen a escala molecular y atómica porque sus comportamientos pueden cambiar sig-nificativamente con el tamaño. Estos tipos de estudios, que ayudarán a identificar los nanoma-teriales útiles para aplicaciones específicas o para nuevas investigaciones, son práctica usual en relación con los materiales a granel, tales como los minerales y los químicos.
Además, los descubrimientos científicos pasa-dos, tales como los materiales radioactivos, los
clorofluorocarbonos y el asbesto, planteaban riesgos toxicológicos significativos que no fueron identificados hasta después de haberse regis-trado pérdidas de vidas o daños graves en el medio ambiente. De un modo similar, dado que los nanomateriales son suficientemente peque-ños como para sortear las membranas biológicas o unirse a las células tisulares, podrían plantear serias amenazas toxicológicas, riesgos que tam-bién deben considerarse en las evaluaciones de los materiales.2 A pesar de estas advertencias desafiantes, muchos especialistas anticipan que las aplicaciones nanotecnológicas producirán beneficios revolucionarios.
Algunos de los materiales más avanzados uti-lizados en nuestros días son las aleaciones, con amplia aplicación en aeronaves, automóviles, embarcaciones y edificios. Los especialistas en ciencia de los materiales pueden crear un metal de aleación que sea resistente pero al mismo tiempo liviano y que combine las mejores propie-dades de cada metal componente. Los nanomate-riales, como las aleaciones, también pueden ser refinados para ajustarse a las necesidades de una aplicación específica. Existen dos procedimien-tos principales de diseño de nanomateriales: • El diseño descendente (top-down) de materia-
les: Los científicos realizan modificaciones nanoescalares de los materiales existentes, habitualmente de las superficies, para mejorar sus propiedades originales.
• El diseño ascendente (bottom-up) de materia-les: Los científicos desarrollan nuevos materia-les a partir de subcomponentes nanoescalares,
lo que a menudo se traduce en un mayor refina-miento del desempeño del material.
El enfoque descendente, que utiliza métodos tales como la nanolitografía, la nanoablación o el nanograbado, genera nanoestructuras a partir de objetos macroscópicos, o materiales a granel. Estos métodos de nanofabricación suelen ser ver-siones reducidas de métodos de fabricación más amplios. El mejoramiento descendente de un material existente puede visualizarse como un proceso de nanotecnología incremental porque el material original no se altera radicalmente. No obstante, los resultados impresionantes que puede arrojar fueron demostrados por los científicos del Instituto Nacional de Normas y Tecnología (NIST) de Gaithersburg, en Maryland, EUA.
Los científicos del NIST mejoraron las propie-dades luminescentes de los diodos emisores de luz de alto brillo (HBLED) a través de una técnica de nanograbado. La tecnología HBLED posee nume-rosos usos prácticos, tales como la iluminación doméstica, la iluminación de contraluz para los televisores de pantalla plana y los dispositivos láser, porque estos diodos requieren mucha menos potencia y son más pequeños que en la tecnología de iluminación más tradicional. Para mejorar sus capacidades de emisión de luz, las superficies de los HBLED son nanograbadas con un diseño circu-lar de redes de difracción de Bragg (CBG). El CBG reduce la refracción interna, lo que permite la emisión de más luz desde los HBLED (abajo). El proceso mejora la eficiencia de la emisión de luz de los HBLED utilizados en los experimentos, que pasa del 2% al 41%.3
> HBLED mejorados. Un distribuidor de la reflección Bragg (DBR, extremo superior izquierdo) mejora la extracción de la luz, a través de la reducción significativa de la luz que se refleja sobre el sustrato de cobertura de los HBLED. Una rejilla de difracción circular de Bragg (CBG) extrae la luz desde el exterior del cono de reflexión DBR no modificado. La litografía por haz de electrones genera patrones de tipo CBG, que colectivamente forman una máscara CBG. El grabado de la máscara por haz de iones, asistido con cloro, produce una rejilla CBG de 150 nm de profundidad (extremo inferior izquierdo). Alrededor de la parte externa del dispositivo se graba en seco una canaleta para permitir que la luz refractada internamente, dentro de las capas DBR, sea emitida lateralmente. Los resultados (derecha) indican que una rejilla CBG con un paso de graduación de 525 nm (curva roja) constituye el mejoramiento más significativo de la intensidad de la luz con respecto al HBLED estándar (curva negra). (Fotografías, cortesía del Instituto Nacional de Normas y Tecnología.)

42 Oilfield Review
Oilfield ReviewAutumn 10Nanotech Fig. 2ORAUT10-Nano Fig. 2
10
10 nm
Componentes electrónicosdel detector y la
retroalimentación
Sensor por fotodiodo
Láser
Ménsula y puntaSuperficie del espécimen
Escáner PZT
Punto láser reflejado
µm
Mediante el empleo del proceso de diseño ascendente de materiales, los científicos desarro-llan los nanomateriales a partir de los subcompo-nentes moleculares o atómicos o a partir de otras nanoestructuras. Existen numerosos métodos de desarrollo de nanomateriales, cada uno de los cuales posee sus propias variaciones:• Autoensamblaje molecular: Las moléculas adop-
tan disposiciones definidas, según su forma y los grupos funcionales.
• Procesos basados en aerosoles: Los químicos rociados sobre las superficies macroscópicas reaccionan con la superficie y forman gotas pequeñas, generando nanopartículas.
• Condensación atómica: Con el calor intenso, los materiales a granel tales como el metal, se atomizan en el vacío; luego, los científicos diri-
gen la materia dispersa hacia el interior de una cámara de recolección que contiene gas. Los átomos vaporizados colisionan con las molécu-las de gas, lo que produce un enfriamiento rápido con la subsiguiente condensación que forma nanopartículas.
A menudo se alude al diseño ascendente de los materiales de autoensamblaje con el término “nanotecnología evolutiva” porque los materiales creados pueden ser altamente personalizados y, por consiguiente, ofrecen capacidades únicas en comparación con los materiales producidos con otros métodos. Los métodos ascendentes han sido utilizados en la industria médica para crear agentes de contraste que mejoran las imágenes médicas y los sistemas de administración de fár-macos, diseñados para transportar las cargas úti-
les de los tratamientos hasta las áreas objetivo o hasta determinadas células del cuerpo. Además, existen nanosensores que detectan las propieda-des en sitio y nanogeneradores que pueden cap-tar energía, tal como el calor o el movimiento, y convertirla en electricidad.
Sin embargo, para el simple hecho de comen-zar a trabajar en la nanoescala, se necesitaron dos invenciones de la década de 1980 que permitieron que los científicos observaran, y posteriormente manipularan, las nanoestructuras. El microscopio de barrido de efecto túnel (STM), inventado a comienzos de la década de 1980, permitió a los científicos observar los átomos solos presentes en los materiales. Posteriormente, el microscopio de fuerza atómica (AFM), introducido en 1989, per-mitió que los científicos manipularan los átomos individuales (izquierda). En 1985, el STM fue una herramienta esencial para el descubrimiento de los fullerenos, moléculas compuestas enteramente de carbono con estructuras en forma de esferas huecas, cilindros o elipsoides.4 Los fullerenos cilín-dricos o tubulares son más conocidos como nanotu-bos de carbono (CNT); se utilizan en gran parte de los proyectos nanotecnológicos de nuestros días.
Este artículo define primero las nanoestructu-ras. Luego, describe los esfuerzos de investigación registrados recientemente en diversos campos, entre los que se encuentran las industrias electró-nica, médica y cosmética. Una descripción del tra-bajo realizado por el Consorcio de Energía de Avanzada (AEC) destaca las actividades de investi-gación precompetitivas llevadas a cabo en el área de las nanociencias y las potenciales áreas de impacto dentro del flujo de trabajo de E&P.5 El consorcio, diri-gido por el Departamento de Geología Económica de la Universidad de Texas, en Austin, EUA, está com-puesto por Baker Hughes, BP, ConocoPhillips, Halliburton, Marathon Oil Corporation, Occidental Petroleum Corporation, Schlumberger, Shell y Total. El objetivo principal del AEC es el desarrollo de nanosensores inteligentes que puedan ser inyecta-dos en los yacimientos de petróleo y gas para mejorar la recuperación de recursos. Otros ejemplos tomados de la industria del petróleo y el gas proporcionan una visión general de las aplicaciones ajenas al alcance del AEC.
Una introducción a la nanotecnologíaEn la ciencia, el término “nano” significa una mil-millonésima parte; no obstante, se utiliza normal-mente como un prefijo para describir cualquier cosa que infiera o pertenezca a la nanotecnlogía, tal como la nanociencia, la nanoelectrónica y la nanorrobótica. Si bien los tamaños exactos aún tienen que estandarizarse, el tamaño de las
> La nanotecnología de fuerza atómica. El primer microscopio de fuerza atómica (AFM) comercial fue introducido en el año 1989. Una ménsula con una punta fina (extremo superior derecho) explora físicamente la superficie de los especímenes. La deflexión de la ménsula se mide mediante la detección del movimiento de un punto láser, utilizando un sensor por fotodiodo (izquierda). Un escáner piezoeléctrico (PZT) controla el movimiento de la ménsula para asegurar que se ejerza una fuerza constante contra el espécimen. Como dato de entrada para la ley de Hooke, se utilizan la distancia de deflexión y el coeficiente de rigidez de la ménsula para determinar la fuerza. Cuando la punta entra en contacto con un átomo de un material que se está explorando, se aplica una tensión para levantar el átomo con la punta. El átomo puede ser desplazado luego a otra posición y la polaridad de la tensión puede invertirse para colocarlo en una nueva posición. Los científicos del Instituto Nacional de Normas y Tecnología utilizaron esta técnica para crear su logo con un AFM, colocando átomos de cobalto sobre una superficie de cobre (extremo inferior derecho). Cada átomo (los puntos de cada letra del logo) se comporta como un guijarro en una laguna ya que los electrones perturbados en la superficie de cobre muestran una apariencia ondulante.

Volumen 22, no. 3 43
nanoestructuras habitualmente oscila entre 1 nm y 1 μm (1 × 10-9 and 1 × 10-6 m) (arriba). Como comparación, el tamaño de las microestructuras varía entre 1 y 100 μm. En este artículo, se utiliza una clasificación estándar para definir los princi-pales tipos de unidades nanoescalares básicas.6 Estas unidades básicas forman nanomateriales, tales como los nanoaerosoles, los nanopolvos o las nanoláminas:• Las unidades básicas 0 dimensionales (0D) (en
las que la longitud es igual al ancho) compren-den las nanopartículas, los nanoclusters y los nanocristales.
• Las unidades básicas unidimensionales (1D) (en las que la longitud es mayor que el ancho) comprenden los nanotubos, las nanofibras y los nanocables.
De los objetos 0D, las nanopartículas son estructuras amorfas o bien semicristalinas, cuyo tamaño oscila entre 10 nm y 1 μm. Durante la fabricación, las nanopartículas que forman los nanomateriales pueden ser de diferentes tamaños, que pueden variar en más de un 15% y así y todo formar el nanomaterial, sin afectar su especifica-ción de diseño. A diferencia de las nanopartículas,
los nanoclusters son sensibles a su tamaño y pue-den ser más reactivos si se aumentan o se reducen proporcionalmente.7 Por consiguiente, la produc-ción de nanomateriales a partir de nanoclusters requiere variaciones de tamaño mucho más peque-ñas, habitualmente de menos del 15%, o el nano-material se comportará de manera diferente; por ejemplo, los nanoclusters de una nanoemulsión podrían aglomerarse de manera indeseada, produ-ciendo lotes fallidos.8
Los nanoclusters, como las nanopartículas, poseen una estructura amorfa o bien semicrista-lina, pero son más pequeños que las nanopartícu-las: su diámetro oscila entre 1 y 10 nm. En el extremo más pequeño de esta escala, se caracteri-zan a veces por su número de átomos: que oscilan entre 200 y 1 000 aproximadamente. Los nano-cristales son nanoestructuras monocristalinas, cuyo tamaño varía de 1 a 30 nm.9 Los nanocristales semiconductores se conocen más comúnmente como puntos cuánticos y poseen numerosas aplica-ciones potenciales en los nanosensores y en otros componentes eléctricos; además, se utilizan como marcadores de fácil detección en aplicaciones tales como la generación de imágenes médicas.
Las unidades básicas de nano tamaño que son 1D poseen diámetros que oscilan entre 1 nm y 1 μm, pero sus longitudes son ilimitadas y a menudo exceden 1 μm. Los nanotubos pertenecen al grupo de las unidades básicas 1D y poseen un núcleo hueco, en tanto que los nanocables, las nanofibras y los nanorods son sólidos. Las nanofibras son amorfas y típicamente no conductoras. Los nano-cables son cristalinos y pueden ser conductores, semiconductores o aislantes. Se encuentran en muchos de los nanocircuitos existentes, tales como los nanocircuitos de los microchips.
Aplicaciones industrialesHoy, una de las aplicaciones más comunes de la nanotecnología gira en torno de la industria elec-trónica, específicamente, de las unidades centra-les de procesamiento (CPU). Estos componentes se utilizan en las computadoras; su tarea es eje-cutar instrucciones binarias con la mayor eficacia posible. Están conformados por millones de tran-sistores, que son interruptores de dos etapas. Cuanto más cerca se encuentran unos de otros y cuanto más pequeños son los transistores, más rápido se transmite una señal eléctrica. Esta com-binación de proximidad y tamaño pequeño incre-menta el número de instrucciones que pueden ser calculadas por segundo y mejora la eficiencia del procesador en términos de energía eléctrica.
Las CPU se fabrican habitualmente con obleas de silicio. A la oblea se le aplica una capa de mate-rial fotorresistivo, mediante un proceso de revesti-miento por rotación, que distribuye la solución de manera uniforme sobre la superficie. A través de un proceso de nanofabricación, denominado lito-grafía por inmersión, se forman canales por curado en la capa fotorresistiva para crear un patrón de
4. Kroto HW, Heath JR, O’Brien SC, Curl RF y Smalley RE: “C60: Buckminsterfullerene,” Nature 318, no. 6042 (14 de noviembre de 1985): 162–163.
5. Para obtener más información sobre el AEC, consulte: http://www.beg.utexas.edu/aec/ (Se accedió el 8 de septiembre de 2010).
6. Fahlman BD: Materials Chemistry. Dordrecht, Países Bajos: Springer (2007): 275–357.
7. En química organometálica se utiliza el término “cluster” para describir las jaulas moleculares de tamaños fijos.
8. Para obtener más información sobre la dispersión del tamaño de los nanocristales, consulte: Wan YM, Van Der Jeugd K, Baron T, De Salvo B y Mur P: “Improved Size Dispersion of Silicon Nanocrystals Grown in a Batch PSIVD Reactor,” en Claverie A, Tsoukalas D, King T-J y Slaughter JM (eds): Materials Research Society Symposium Proceedings 830.
Warrendale, Pensilvania, EUA: Materials Research Society (2005): 257–262.
9. Un material monocristalino posee una red cristalina que es continua hasta los bordes del material, sin ningún límite intergranular.
>Nanoestructuras en primer plano. Normalmente, se utiliza una solución de nanocristales de sílice coloidal, suspendida en agua (extremo superior izquierdo), como abrasivo para el pulido fino de las obleas de silicio. Otra forma de nanocristal, el dióxido de vanadio (extremo superior, centro) ha sido utilizado para los obturadores ópticos de alto rendimiento. La velocidad de transmisión entre la fase semiconductora transparente y la fase conductora reflectora puede ser de una décima de una trillonésima parte de un segundo. Los nanocables (extremo superior derecho) poseen potencial para los nanocircuitos futuros. Los puntos cuánticos (extremo inferior izquierdo) son semiconductores con aplicaciones en los paneles solares, los dispositivos láser y los marcadores para la generación de imágenes. Los nanotubos de carbono (extremo inferior, centro) se encuentran entre las formas más utilizadas de nanoestructuras. Los nanocubos (extremo inferior derecho) ilustran la diversidad de formas que pueden fabricarse actualmente. [Imágenes, cortesía del Instituto Nacional de Normas y Tecnología y Furmanj (extremo superior, centro) en Wikipedia en idioma inglés, http://en.wikipedia.org/wiki/File:Nanostars-it1302.jpg (Se accedió el 9 de noviembre de 2010.)]
Oilfield ReviewAutumn 10Nanotech Fig. 3ORAUT10-Nano Fig. 3
20 nm 5 µm
20 µm
20 µm 1µm 50 nm

44 Oilfield Review
diseño de circuito (arriba). La luz proveniente de una fuente de longitud de onda estrecha, tal como un excimer láser de argón-fluoruro de 193 nm, atra-viesa una máscara del tipo del patrón de diseño de circuito y luego una serie de lentes que enfocan el patrón de diseño en la nanoescala. La exposición de la capa fotorresistiva deja un patrón de diseño de circuito nanoescalar. El patrón expuesto a la luz se remueve mediante un proceso de grabado quí-mico que no afecta a la sustancia fotosensible no expuesta. Para construir circuitos tridimensionales de alta complejidad, se agregan y se remueven por grabado más capas de semiconductor, aislador y sustancia fotosensible. Mediante la utilización del proceso de litografía por inmersión, ahora es posi-ble lograr rasgos de menos de 32 nm de ancho.10
En la industria farmacéutica, las motivacio-nes clave para la investigación de nuevos produc-tos consisten en desarrollar fármacos que puedan combatir determinadas dolencias, con efectos colaterales mínimos para el paciente, y que admi-nistren los tratamientos con la mayor rapidez posible. Si bien los métodos terapéuticos contra el cáncer han mejorado significativamente en los últimos 50 años, prolongando muchas vidas, cier-tos elementos de los tratamientos tales como la quimioterapia antineoplástica, siguen siendo conceptualmente iguales desde la década de 1950.11 Esta medicación, basada en el uso de quí-micos, retarda las velocidades de división de las células. Combinada con la eliminación quirúr-gica de los tumores cancerosos y la radioterapia, la quimioterapia es una forma efectiva de dete-ner la diseminación del cáncer. No obstante,
dado que dichos métodos de tratamiento contie-nen procesos que son perjudiciales para las célu-las sanas, los investigadores están haciendo esfuerzos para descubrir procedimientos médi-cos que sean menos dañinos o completamente seguros de aplicar en los pacientes.
Los sistemas de administración de fármacos (DDS) basados en técnicas nanotecnológicas constituyen un área de investigación con potencial para mejorar significativamente muchos trata-mientos.12 Mediante la aplicación de esta técnica, las moléculas de los fármacos se pueden unir a través de un enlace covalente a la superficie rela-tivamente grande de los nanotubos de carbono (CNT). Además de transportar la medicación adosada, el paquete de CNT se configura con moléculas dirigidas a blancos, que identifican a los receptores de determinadas células. Este pro-ceso limita los efectos negativos de la medicación sobre las células sanas del cuerpo, mejorando la eficacia del tratamiento.
Un proyecto de investigación reciente, que contó con la colaboración del Centro de Salud de la Universidad de Connecticut, en Farmington, EUA, y los Institutos Nacionales de Salud de Bethesda, en Maryland, se centró en la utiliza-ción de nanotubos de carbono de una sola pared (SWNT) como mecanismo de transporte para los agentes anticancerígenos.13 A los SWNT se les aplica un proceso complejo de múltiples etapas
que los prepara para recibir los medicamentos anticancerígenos. Los tubos se oxidan en ácido, produciendo grupos carboxilatos en sus superfi-cies. Luego, se utiliza un promotor químico con el fin de crear una reacción de amidación para ado-sar la medicación anticancerígena a los SWNT.
Uno de los fármacos que está siendo probado es una droga quimioterapéutica a base de platino que interfiere con la división celular en la mito-sis. La droga se combina en el SWNT con un fac-tor de desarrollo epidérmico, que representa el componente del DDS dirigido al blanco (abajo). Un grupo de ensayo de ratones de laboratorio fue inyectado con células cancerígenas, monitoreán-dose el desarrollo de tumores de 500 mg. La mitad de este grupo fue tratada con el nuevo DDS, que detuvo el crecimiento posterior de los tumores durante un período de 10 días. La otra mitad de los sujetos del ensayo estaba compuesta por un grupo de control, en el que los tumores se desarrollaron hasta alcanzar más de 2 000 mg.
La industria cosmética también posee un sec-tor de investigación y desarrollo nanotecnológicos, que goza de buena reputación.14 Por ejemplo, en muchas pantallas solares modernas se utilizan par-tículas de óxido metálico, tales como el dióxido de titanio [TiO2] y el óxido de cinc [ZnO], porque su
Fuente de luz
Lente
Capa delíquido
Obleade silicio
Máscara
AireCapa
de líquido
Lente
Plano focalen el líquido
Plano focalen el aire
Luz
Oilfield ReviewAutumn 10Nanotech Fig. 4ORAUT10-Nano Fig. 4
> Sistema de administración de fármacos mediante nanotubos de una sola pared (SWNT). Los receptores del factor de crecimiento epidérmico (EGFR) son producidos en exceso en las células epidérmicas cancerosas. La inserción de las proteínas del factor de crecimiento epidérmico (EGF) en los SWNT hace posible que los nanotubos favorezcan a las células cancerosas con respecto a las células sanas. Una vez en el lugar, cada SWNT puede transportar una selección de tratamientos con drogas contra el cáncer que son expuestos a las células cancerosas, tales como el enlace químico. En este ejemplo, también se adosaron puntos cuánticos fluorescentes (nanopartículas semiconductoras <10 nm) para ayudar a los científicos a localizar y confirmar la inserción exitosa de los SWNT en los tumores cancerígenos.
Sistema deadministración
de fármacos
O
O
Punto cuántico como marcador
NH
SWNT
OON
H
NH
NH2
ONH
Superficie de la célula cancerosa
EGFREGF
O
NH2
Pt
Cl
Tratamiento a base de platino
Oilfield ReviewAutumn 10Nanotech Fig. 5ORAUT10-Nano Fig. 5
> Litografía por inmersión. Una fuente de luz de longitud de onda estrecha se coloca sobre una máscara que contiene un patrón de diseño de circuito (izquierda). Luego, la luz canalizada se enfoca a través de una lente que reduce el tamaño del patrón de diseño de circuito a la nanoescala. Un medio líquido que posee un índice de refracción mayor que el del aire, que es 1,0, ocupa el lugar del intervalo de aire utilizado en el proceso de fotolitografía. El mayor índice de refracción de la capa de líquido incrementa la longitud focal y el ángulo de refracción (derecha). En la fabricación de unidades centrales de procesamiento (CPU), este proceso puede reiterarse más de 50 veces; cada ciclo consiste en el tratamiento químico, la limpieza, el dopado (dopaje) y el agregado de más sustancia fotosensible para crear muchas capas de circuitos.

Volumen 22, no. 3 45
10. Para obtener más información sobre el proceso de litografía por inmersión, consulte: “Technology Backgrounder: Immersion Lithography,” http://www.icknowledge.com/misc_technology/Immersion%20Lithography.pdf (Se accedió el 30 de agosto de 2010).
11. Hirsch J: “An Anniversary for Cancer Chemotherapy,” JAMA 296, no. 12 (27 de septiembre de 2006): 1518–1520.
12. Prato M, Kostarelos K y Bianco A: “Functionalized Carbon Nanotubes in Drug Design and Discovery,” Accounts of Chemical Research 41, no. 1 (Enero de 2008):60–68.
13. Bhirde AA, Patel V, Gavard J, Zhang G, Sousa AA, Masedunskas A, Leapman RD, Weigert R, Gutkind JS y Rusling JF: “Targeted Killing of Cancer Cells in Vivo and
tamaño pequeño les permite limitar la adsorción de los rayos ultravioleta a parámetros seguros. Además, las partículas son invisibles a simple vista cuando se aplican en la piel y no se aglomeran, lo que facilita la aplicación de la pantalla solar.
Existe cierta preocupación acerca de los ries-gos toxicológicos que implica la aplicación de nanopartículas directamente en la piel, y algunos resultados indican que el TiO2 puede penetrar en la epidermis, en tanto que otros resultados con-tradicen esas conclusiones. Actualmente, la Administración de Alimentos y Medicamentos de EUA está llevando a cabo un estudio de los efec-tos del tamaño de las nanopartículas sobre la penetración en la piel y un segundo estudio acerca de los efectos específicos del TiO2 y del ZnO sobre la piel extirpada de los seres humanos, durante un período de 24 horas.15
La nanotecnología en los ambientes de E&PSi bien las nanotecnologías están siendo cada vez más utilizadas en otras industrias, la industria del petróleo y el gas recién transita las primeras eta-pas de exploración de este nuevo campo. La princi-pal dificultad que implica la aplicación de los éxitos experimentados por otras industrias es el ambiente operativo hostil del fondo del pozo, que incluye condiciones de alta temperatura y alta pre-sión, y a menudo una diversidad de fluidos corrosi-vos. Por consiguiente, no sólo la industria de E&P debe considerar cómo aprovechar la nanotecnolo-gía para resolver los problemas asociados con los campos petroleros, sino que además las activida-des de investigación deben contemplar el desarro-llo de nanoestructuras capaces de sobrevivir a los rigores que imponen estas condiciones tan com-plejas. No obstante, la industria ha logrado ciertos avances en diversas áreas.
La caracterización de yacimientos requiere un software de modelado y simulación de avan-zada para pronosticar cómo se comportarán los fluidos del yacimiento y las rocas durante la fase de producción. La disponibilidad de datos físicos precisos es esencial para reducir la incertidum-bre asociada con estas predicciones. Diversas fuentes, incluidos estudios geológicos, levanta-mientos sísmicos, registros y pruebas de pozos, y datos de producción, proporcionan datos de entrada para generar un panorama preciso del yacimiento. Pero las herramientas de adquisición de registros de alta resolución pueden recolectar datos solamente en las proximidades del pozo, y los levantamientos sísmicos, si bien cubren áreas extensas, poseen un grado de resolución compa-rativamente bajo.
No obstante, si fuera posible conocer las propie-dades físicas y químicas del yacimiento y sus flui-
dos, al mismo tiempo que se mantienen los niveles de resolución de los datos más cercanos a los de los registros, los operadores podrían hallar formas de mejorar considerablemente la eficiencia de la recuperación. A estos efectos, los investigadores están investigando el empleo de nanopartículas que puedan ser inyectadas en un yacimiento para asistir en su caracterización. Una de las primeras metas consiste en crear nanopartículas que posean las propiedades correctas, tales como el tamaño, para atravesar las estructuras del yaci-miento, y resistencia a la floculación para evitar el taponamiento de las estructuras. Un paso poste-rior consistirá en posibilitar que estas partículas midan las propiedades del yacimiento a medida que son transportadas. Se están desarrollando dos tipos de aplicaciones para explotar este potencial: los nanosensores y las nanopartículas que acen-túan los contrastes.
Inyectados en los yacimientos, los sensores explorarán físicamente los fluidos y las rocas yacimiento a medida que son transportados por el flujo de fluido. Los datos serán recuperados mediante la ejecución de un análisis directo de los nanosensores recuperados con los fluidos de
producción, o en forma más ambiciosa, mediante la comunicación inalámbrica con los sensores en sitio. Por otro lado, las nanopartículas que acen-túan los contrastes no poseen capacidades de recolección de datos. Pero se utilizarán para mejorar los métodos tradicionales de adquisición de datos, tales como la generación de imágenes mediante resonancia magnética nuclear (NMR) o los levantamientos electromagnéticos con fuen-tes controladas (CSEM), de un modo similar al que los agentes de contraste mejoran la genera-ción de imágenes médicas.
Transporte durante el proceso de detecciónUn ejemplo sin precedentes de nanotecnología aplicada a los campos petroleros proviene de Medio Oriente. En el año 2007, Saudi Aramco puso en marcha un proyecto de investigación a largo plazo, que pudo utilizarse en los yacimien-tos carbonatados de Arabia. En una etapa inicial del proyecto se determinó cuán pequeñas necesi-taban ser las nanopartículas para atravesar las gargantas de poros; es decir, los canales de flui-dos permeables más pequeños presentes en las rocas yacimiento (arriba). Se efectuaron pruebas
Oilfield ReviewAutumn 10Nanotech Fig. 6ORAUT10-Nano Fig. 6
400
2 200 Garganta de poro
Espacio de poro
NanopartículaGrano
µm µm
µm
in Vitro with EGF-Directed Carbon Nanotube Based Drug Delivery,” ACS Nano 3, no. 2 (13 de enero de 2009): 307–316.
14. En el año 2008, el sexto mayor número de patentes de EUA relacionadas con las nanotecnologías perteneció a una compañía de productos cosméticos: Chen H, Roco MC, Li X y Lin Y: “Trends in Nanotechnology Patents,” Nature Nanotechnology 3, no. 3 (Marzo de 2008): 123–125.
15. Katz LM: “Nanotechnology and Applications in Cosmetics: General Overview,” en Morgan SE, Havelka KO y Lochhead RY (eds): Cosmetic Nanotechnology: Polymers and Colloids in Cosmetics. Washington, DC: American Chemical Society, ACS Symposium Series 961 (2007): 193–200.
> Poros y gargantas. Los poros son cavidades microescalares (áreas con tinte azul) existentes entre los granos (áreas blancas y amarillas) que contienen fluidos o gases. Las gargantas de poros son los conductos estrechos que vinculan los poros (extremo superior izquierdo) y constituyen las estructuras permeables más pequeñas de la roca yacimiento. Para garantizar el éxito de la nanotecnología en un yacimiento, es preciso que los agentes de contraste o los nanosensores atraviesen (líneas rojas) una formación sin flocular, obturar los poros, o dañar la permeabilidad del yacimiento. Una visualización 3D más compleja de los poros y las gargantas se observa en la imagen del extremo superior derecho. (Fotografía, cortesía de Dave L. Cantrell, Saudi Aramco.)

46 Oilfield Review
de inyección de mercurio a alta presión en aproxi-madamente 850 núcleos pequeños de diferentes áreas del campo Ghawar. El análisis resultante indicó la existencia de gargantas de poros de tan sólo 0.5 μm de diámetro.16 En base a estudios pre-vios sobre fenómenos de transporte, los científi-cos dedujeron que un límite de tamaño seguro
partículas de 10 nm en 250 bbl [40 m3] de agua de inyección.17 La solución nanoenriquecida, de 100 partes por millón (ppm), fue bombeada luego en la formación Arab-D del campo Ghawar. A continua-ción, se inyectó salmuera para transportar la mez-cla a lo largo de una distancia estimada de 5 a 6 m [15 a 20 pies] lejos del pozo. Luego, se cerró el pozo de inyección durante tres días antes de explo-tar el yacimiento. Los ingenieros realizaron un muestreo extensivo de los fluidos de producción durante dos días a fin de determinar la presencia de nanopartículas mediante la técnica de espec-troscopía de fluorescencia.
A través de la comparación de las concentra-ciones de nanopartículas presentes en las mues-tras de agua producida y en el agua a inyectar, los investigadores de Saudi Aramco confirmaron un factor de recuperación alto de aproximadamente 86%, lo que demostró la capacidad de las nano-partículas para mantenerse coloidalmente esta-bles en condiciones de alta temperatura y alta salinidad. La alta recuperación indicó además que las nanopartículas lograron atravesar las gargan-tas de poros sin ninguna afinidad con la formación carbonatada. Las pruebas aceleradas de laborato-rio y las mediciones de presión de boca de pozo, obtenidas durante la prueba de pozo, no mostra-ron signos de reducción de las tasas de flujo de fluido ni de la permeabilidad del yacimiento.
Las instituciones académicas están procurando proyectos similares, que investiguen el transporte de los nanosensores a través de los yacimientos. Entre las diversas aplicaciones potenciales se encuentran la detección del petróleo residual y de otras propiedades del yacimiento, tales como aci-dez, salinidad, presión y concentraciones de dióxido de carbono [CO2] y ácido sulfhídrico [H2S]. Si bien son aún incipientes, muchos proyectos ya han registrado avances.
Un equipo ha comenzado a explorar el trans-porte y la retención de las nanopartículas a través de muestras de roca yacimiento.18 Recientemente, este trabajo se extendió para demostrar un método de estimación del petróleo residual en sitio (ROIP). Los científicos de la Universidad de
> La importancia de la funcionalización de la superficie de las nanopartículas. En este ejemplo, luego de la inyección de nanopartículas con funcionalización inadecuada, grandes cantidades de nanopartículas quedaron en las superficie de los granos de rocas (izquierda). Este hecho indudablemente reduciría la permeabilidad del yacimiento; por consiguiente, los científicos buscaron formas de modificar la química de la superficie de las nanopartículas. Después de que los científicos inyectaron nanopartículas bien funcionalizadas, los granos de rocas quedaron limpios (derecha).
Oilfield ReviewAutumn 10Nanotech Fig. 7ORAUT10-Nano Fig. 7
2 2 µm µm
Efluente
Afluente
Columna empacadacon dolomía o arenisca1
Oilfield ReviewAutumn 10Nanotech Fig. 8ORAUT10-Nano Fig. 8
µm
16. Kanj MY, Funk JJ y Al-Yousif Z: “Nanofluid Coreflood Experiments in the ARAB-D,” artículo SPE 126161, presentado en el Simposio y la Exhibición Técnica de la Sección de Arabia Saudita de la SPE, Al-Khobar, Arabia Saudita, 9 al 11 de mayo de 2009.
17. Para obtener más información sobre el estado reciente del proyecto, consulte: Bence H: “Nanobot Trial a Winner,” http://www.aramcoexpats.com/Articles/Pipeline/Saudi-Aramco-News/Dhahran-Media/6346.aspx (Se accedió el 20 de agosto de 2010).
18. Yu J, Berlin JM, Lu W, Zhang L, Kan AT, Zhang P, Walsh EE, Work SN, Chen W, Tour JM, Wong MS y Tomson MB: “Transport Study of Nanoparticles for Oilfield Application,” artículo SPE 131158, presentado en la Conferencia Internacional sobre Acumulación de Incrustaciones en Campos Petroleros de la SPE, Aberdeen, 26 al 27 de mayo de 2010.
>Montaje de laboratorio. Los científicos trituraron muestras de núcleos de dolomía y arenisca Berea y luego filtraron el residuo para obtener una distribución de los tamaños de grano, oscilantes entre 106 y 250 μm. Luego, los granos fueron lavados con tolueno y metanol para eliminar el petróleo entrampado y se empacaron en columnas de vidrio individuales. Los científicos calcularon la incursión y la concentración de las nanopartículas [imagen del microscopio electrónico de barrido (SEM), inserto] mediante la inyección de un volumen de poros y el posterior empleo de un espectrofotómetro para detectar la fluorescencia ultravioleta de las nanopartículas presentes en el efluente.
para las nanopartículas equivalía a una quinta-séptima parte del límite de las gargantas de poros, o un valor oscilante entre 70 y 100 nm. Con estas restricciones, los científicos investigaron diversos métodos de funcionalización de las nanopartícu-las para abordar la compatibilidad con las condi-ciones rigurosas del yacimiento (arriba).
Recientemente, el proyecto logró un hito importante en la inyección y producción de nano-partículas en un yacimiento activo. En el primer semestre de 2010, los científicos dispersaron nano-

Volumen 22, no. 3 47
Conc
entra
ción
de
nano
partí
cula
s, %
0
20
40
60
80
100
0 5 10 15 20 25 30 35 40
Número de volúmenes de poros inyectados
Columna de dolomía con cationes divalentes
Conc
entra
ción
de
nano
partí
cula
s, %
0
20
40
60
80
100
0 5 10 15 20 25 30 35 40
Número de volúmenes de poros inyectados
Columna de dolomía con agua de mar sintética
Esquema de puentes salinos
Mg2+ or Ca2+
Nanopartículas
Oilfield ReviewAutumn 10Nanotech Fig. 10ORAUT10-Nano Fig. 10
Comienzo delproceso de lavado
Agua desionizada
Agua de mar sintética[Ca2+] = 3,5 mmol[Mg2+] = 5,5 mmol
[Ca2+], [Mg2+] = 6.0 mmol[Ca2+], [Mg2+] = 0.8 mmol
Comienzo delproceso de lavado
NanopartículastratadasNanopartículasno modificadas
Rice, en Houston, y de la Universidad de Nankai, en Tianjin, República Popular de China, prepara-ron un procedimiento de inundación de núcleos para determinar cómo el cambio de la composi-ción de los fluidos de inyección y de las propieda-des de las rocas podría afectar el transporte de las nanopartículas (página anterior, abajo).
Durante una serie de pruebas de las propieda-des de los fluidos, los científicos descubrieron que el incremento de la fuerza iónica del fluido, mediante el agregado de cloruro de potasio [KCl], incrementó el tiempo requerido para detectar la presencia de nanopartículas en el efluente. Además, el incremento de la fuerza iónica redujo significativamente la concentra-ción de nanopartículas en el efluente (derecha). No obstante, en el peor de los casos, cuando las pruebas detectaron sólo un 40% de las nanopartí-culas inyectadas, el lavado con agua desionizada posibilitó la recuperación de más del 90% de las nanopartículas atrapadas.
En otro estudio se consideró cómo los cationes divalentes, abundantes en el agua de mar, afecta-rían el transporte a través de una columna de dolo-mía empacada. Los cationes divalentes son moléculas, o iones, que han perdido dos electrones, lo que los hace altamente reactivos. Los iones de calcio [Ca2+] y los iones de magnesio [Mg2+] son
dos ejemplos de cationes divalentes que se encuen-tran en grandes cantidades tanto en el agua de mar como en la dolomía, una de las muestras de rocas utilizadas en la prueba. Los científicos confirmaron la presencia de puentes salinos en las nanopartícu-las y los iones de Ca y Mg del fluido de inyección y la columna de dolomía (abajo).
> Efecto del cloruro del potasio [KCl]. Se utilizó agua desionizada (curva azul) para caracterizar el flujo a través de una columna de dolomía. Con el agregado de concentraciones cada vez mayores de KCl (curvas púrpura, verde y rojo) a una solución de nanopartículas desionizadas, se redujo significativamente el factor de recuperación. La recuperación total de las nanopartículas fue determinada mediante un proceso de lavado con agua desionizada (círculos negros). Los resultados indican que el incremento de la fuerza iónica hace que las nanopartículas sean depositadas sobre las partículas de dolomía, tal como se pronosticó.
Oilfield ReviewAutumn 10Nanotech Fig. 9ORAUT10-Nano Fig. 9
Conc
entra
ción
de
nano
partí
cula
s, %
0
20
40
60
80
100
0 5 10 15 20 25Número de volúmenes de poros inyectados
Columna de dolomía con cloruro de potasio
Comienzo delproceso de lavado
Agua desionizada0,01% en peso de KCI
1% en peso de KCI0,1% en peso de KCI
> Cationes divalentes y superficies de nanopartículas modificadas. Las nanopartículas con cargas negativas naturales son puenteadas fácilmente por los iones de magnesio [Mg2+] y calcio [Ca2+], que se encuentran normalmente en el agua de mar (izquierda, extremo superior). Los científicos realizaron varios experimentos para determinar el impacto de estos iones sobre el flujo de fluido a través de columnas de rocas empacadas. Cuando se agregó en concentraciones cada vez mayores a las soluciones de nanopartículas (izquierda, extremo inferior), en todas las pruebas, se incrementó la concentración de nanopartículas en el efluente aproximadamente con la misma concentración que la del agua desionizada, para luego reducirse rápidamente. En la solución que contiene la mayor concentración de cationes divalentes (curva púrpura), la cantidad de nanopartículas presentes en el efluente fue mucho menor que la existente con concentraciones más bajas. El agua de mar sintética, que contiene iones monovalentes, fue sometida a prueba con Mg2+ y Ca2+ (curva azul). Sin los cationes divalentes del agua de mar (no mostrado), la concentración de nanopartículas en el efluente fue similar a la del agua desionizada. Luego, las superficies de las nanopartículas fueron tratadas para ajustar su carga, lo que redujo significativamente el efecto puente observado con el agua de mar sintética mezclada con los cationes divalentes en las columnas de rocas dolomíticas (derecha).

48 Oilfield Review
Las pruebas de fluidos se reiteraron luego, utilizando una columna de arenisca empacada. Una de las características predominantes de la arenisca es que se compone principalmente de granos de sílice que, a diferencia de los minerales de dolomía, poseen carga negativa. En una de las pruebas, los científicos observaron que después de inyectar 15 volúmenes de poros, se recuperaba casi el 100% de las nanopartículas, en compara-ción con el 55% observado en la dolomía bajo las mismas condiciones de fluido.
Para mejorar la velocidad de irrupción y el factor de recuperación, los científicos se concen-traron en el tratamiento de las superficies de las nanopartículas para minimizar las interacciones de las cargas. Cuando se reiteraron las pruebas, tanto en la dolomía como en la arenisca, las nanopartículas tratadas alcanzaron un grado de irrupción del 100% en el tercer volumen de poros. Como resultado de este estudio, los científicos pudieron demostrar, bajo condiciones de yaci-miento simuladas en el laboratorio, que las nano-partículas pueden ser inyectadas en los yacimientos con una tasa de recuperación muy alta. Ahora, el equipo está considerando la utilización de nano-partículas similares y moléculas tipo marcadores de hidrocarburos para detectar el ROIP. Los resul-tados iniciales indican que los nanosensores pudie-
ron diferenciar claramente las columnas sin petróleo de las columnas saturadas de petróleo.
Un chip pequeño que se adecua a todoOtra área de investigación nanotecnológica, dentro del estatuto del AEC, extiende los paradigmas de las herramientas existentes a los chips con senso-res de fluidos: en este caso, a los sensores que detectan la presencia de químicos altamente corro-sivos, tales como el gas H2S. Los científicos de la Universidad del Noreste, en Boston, Massachusetts, EUA, desarrollaron un chip con nanosensores incorporados para detectar concentraciones pequeñas de H2S en el aire, el nitrógeno, el vapor de agua y el gas licuado de petróleo. Dado que cada componente es diminuto, los desarrollos futuros de chips podrían incluir múltiples senso-res de diversos tipos para detectar diversos quími-cos y condiciones de fondo de pozo. Con el fin de lograr redundancia en caso de falla y mayor preci-sión, fue posible incorporar uno o más de estos chips con multisensores en una herramienta de fondo de pozo para detectar las propiedades de los yacimientos.
El chip sensor de H2S se basa en un diseño de circuito electrónico de dos terminales (arriba). Estos dos terminales de oro se encuentran conec-tados a lo largo de un canal compuesto por SWNT
funcionalizados. Los SWNT reciben un trata-miento químico durante el proceso de funcionali-zación. Luego, los científicos agregan una solución que contiene millones de moléculas 4-Amino-TEMPO, que se unen en forma covalente con la superficie de los SWNT modificados.19 Estas moléculas producen un efecto especial sobre los SWNT: en ausencia de H2S, la corriente pasa libremente a través de los SWNT, pero ante la presencia de H2S, las moléculas TEMPO se des-componen y reducen la conductividad del canal. Por consiguiente, la conductividad del dispositivo es una medida del nivel de H2S.
Si se exponen nuevamente a las condiciones atmosféricas, las moléculas TEMPO se reforman y el sensor puede recuperarse completamente, lo que posibilita la reutilización del chip. En condicio-nes de laboratorio, los científicos demostraron que el chip puede ser utilizado para detectar la presen-cia de H2S en concentraciones muy pequeñas y en varios ambientes diferentes (próxima página). A fin de resultar comercialmente viable para aplica-ciones de campos petroleros, el chip tendrá que ser desarrollado posteriormente para lograr su nanofa-bricación a bajo costo y luego será necesario pro-barlo en condiciones de fondo de pozo.
Nanopartículas de contrasteLos agentes de contraste son ampliamente utili-zados en la generación de imágenes médicas. Por ejemplo, se inyectan en un paciente para mejorar la resolución de los rayos X o las imágenes de resonancia magnética.20 De un modo similar, los especialistas pronostican que las mediciones de la región vecina al pozo, tales como las medicio-nes derivadas de los registros de resonancia mag-nética nuclear, susceptibilidad magnética, acústicos y de resistividad, pueden ser mejoradas utilizando nanopartículas preparadas especial-mente, que responden mejor que los fluidos de yacimiento en sitio o la roca yacimiento. Estas partículas serían transportadas por todo un yaci-miento, utilizando técnicas de inundación de yacimientos similares a las de las operaciones de campos petroleros de nuestros días. Este con-cepto particular ha sido adaptado para ilustrar los usos potenciales de la nanotecnología en la detección de fracturas hidráulicas.
Los operadores desearían conocer los resulta-dos de las operaciones de fracturamiento antes de comenzar las pruebas de pozos. Después del bombeo, las fracturas que fueron abiertas por el fluido de alta presión que ingresa en las forma-ciones, se cierran una vez que el bombeo se detiene. Cuando las presiones de fondo de pozo producen su cierre, se agrega apuntalante al fluido de fracturamiento para mantener abiertas
> Chip sensor de H2S. Bajo las condiciones iniciales (sin H2S), la corriente puede circular desde el Terminal 1, pasando por el canal de los SWNT, hasta el Terminal 2 (extremo inferior). No obstante, cuando se introduce H2S en el sistema, las moléculas de 4-Amino TEMPO se reducen químicamente, lo que incrementa la resistencia del canal de los SWNT. Esto bloquea completamente la corriente (extremo superior izquierdo). Por consiguiente, la conductividad es una medida del volumen de H2S presente en el sistema. La fotografía (derecha) muestra los terminales (hilos de oro) que conducen al área de los nanosensores.
Oilfield ReviewAutumn 10Nanotech Fig. 11ORAUT10-Nano Fig. 11
NH HNO O
CH3
F F
Molécula de4-AminoTEMPO
Imagen de los SWNT obtenida con elmicroscopio de barrido electrónico (SEM)
Ausencia de corriente
Terminal 1 Terminal 2
Corriente
Capa aislanteSustrato
H2S
Fotografía del chip sensor de H2S
400 nm
Corriente

Volumen 22, no. 3 49
las fracturas. No obstante, puede suceder que el apuntalante no rellene completamente una frac-tura o que retorne al pozo antes de estabilizarse. Si el volumen final de fracturas resultantes es muy pequeño, la operación de fracturamiento no será efectiva para incrementar la permeabilidad hasta que alcance niveles comercialmente via-bles. En este caso, puede ser necesario refractu-rar los pozos mediante fluidos de fracturamiento improvisados y presiones de bombeo más altas.
La identificación de estas oportunidades de fracturamiento pasadas por alto, antes de efec-tuar las pruebas de pozos, constituye un desafío importante ya que los datos de alta resolución de la región vecina al pozo, tales como los registros
de resonancia magnética o de resistividad, no pueden determinar el alcance total de las fractu-ras más profundas. No obstante, para visualizar la formación a mayor profundidad, los operadores pueden “escuchar” las fracturas mediante el monitoreo microsísmico. Así y todo, es probable que este método carezca del nivel de resolución necesario para definir las fracturas con precisión suficiente para calcular los volúmenes con exac-titud.21 En busca de una solución, los socios del AEC, la Universidad de Rice y la Universidad de Alberta, en Edmonton, Canadá, están investi-gando los agentes de contraste nanoescalares para mejorar las mediciones de la susceptibilidad magnética.
19. Para obtener más información sobre el compuesto 2,2,6,6-Tetramethylpiperidin-1-oxyl (TEMPO): Barriga S: “2,2,6,6-Tetramethylpiperidin-1-oxyl(TEMPO),” Thieme Ejournals, https://www.thiemeconnect.de/ejournals/pdf/synlett/doi/10.1055/s-2001-12332.pdf (Se accedió el 11 de octubre de 2010).
20. Ananta JS, Matson ML, Tang AM, Mandal T, Lin S, Wong K, Wong ST y Wilson LJ: “Single-Walled Carbon Nanotube Materials as T2-Weighted MRI Contrast Agents,” Journal of Physical Chemistry C 113, no. 45 (Noviembre de 2009): 19369–19372.
21. Para obtener más información sobre el método de monitoreo microsísmico, consulte: Burch DN, Daniels J, Gillard M, Underhill W, Exler VA, Favoretti L, Le Calvez J, Lecerf B, Potapenko D, Maschio L, Morales JA, Samuelson M y Weimann MI: “Monitoreo y divergencia de los tratamientos de fracturamiento hidráulico,” Oilfield Review 21, no. 3 (Marzo de 2010): 18–31.
> Resultados obtenidos con el chip sensor de H2S. Un chip sensor de H2S fue probado en diversos fluidos de yacimiento simulados en el laboratorio. Los científicos introdujeron el H2S en una cámara estanca de gas, que contenía el chip, y midieron la caída de corriente eléctrica. Para permitir la recuperación del chip, los científicos abrieron la cámara, extrajeron el H2S y la llenaron con aire. En todos los ambientes, el chip detectó la presencia de H2S; el mayor grado de sensibilidad observado fue de aproximadamente 10 ppm en el aire (extremo superior izquierdo). En una de las pruebas, (curva azul, extremo superior derecho), los científicos no permitieron la recuperación del chip después de cada incremento de H2S; cuando abrieron la cámara para extraer el H2S y llenarla con aire, el chip se recuperó completamente, retornando a su estado inicial.
Oilfield ReviewAutumn 10Nanotech Fig. 12ORAUT10-Nano Fig. 12
1,30 x 10-4
1,35 x 10-4
1,40 x 10-4
1,45 x 10-4
1,50 x 10-4
1,55 x 10-4
1,25 x 10-4
Corri
ente
, A
1 200 2 400 3 600 4 800 6 000 7 200 8 4000Tiempo, segundos
H2S en ambiente de aire
10 ppm 25 ppm 50 ppm 75 ppm 100 ppm
Recuperación en el aire
1,25 x 10-4
1,30 x 10-4
1,35 x 10-4
1,40 x 10-4
1,45 x 10-4
1 200 2 400 3 6000 4 800 6 000
Corri
ente
, A
H2S en ambiente de gas licuado de petróleo
Recuperación en el aire
500 ppm700 ppm 1 000 ppm 1 200 ppm 1 500 ppm
1,2 x 10-4
1,3 x 10-4
1,4 x 10-4
1,5 x 10-4
1,1 x 10-4
1,0 x 10-4
Corri
ente
, A
1 200 2 400 3 6000
Tiempo, segundos4 800 6 000 7 200
H2S en ambiente de vapor de agua
Recuperaciónen el aire
10 ppm
25 ppm 50 ppm 75 ppm100 ppm
1,4 x 10-4
1,5 x 10-4
1,6 x 10-4
1,7 x 10-4
1,3 x 10-4
1,2 x 10-4
Corri
ente
, A
2 400 4 800 7 2000Tiempo, segundos
9 600 12 000 14 400
H2S en ambiente de nitrógeno
700 ppm
500ppm
1 000 ppm1 200 ppm
1 500 ppm
1 000 ppm
Recuperaciónen el aire
700ppm
Tiempo, segundos

50 Oilfield Review
Las nanopartículas superparamagnéticas poseen un grado mayor de susceptibilidad mag-nética que cualquier material natural presente en un yacimiento, y cuando se considera su loca-lización, pueden utilizarse para resaltar las frac-turas de la formación. Para representar los volúmenes de fracturas, los investigadores tienen previsto insertar las nanopartículas en el apunta-
lante (arriba). Esto permite la detección del apuntalante, a partir de lo cual se puede calcular el volumen de fracturas. Esta información pro-porciona a los operadores las razones para modi-ficar el material apuntalante o los criterios de bombeo, y además podría suscitar la ejecución de más actividades de investigación para el mejora-miento de los materiales apuntalantes.
Las nanopartículas que acentúan el contraste deben mantener su susceptibilidad magnética superior mientras se encuentran en el fondo del pozo, pero las condiciones de yacimiento, tales como alta temperatura, pueden reducir el grado de reacción de ciertos nanomateriales. El grupo de la Universidad de Rice fabricó diversas nanopartí-culas potenciales con propiedades superparamag-néticas. Los científicos de la Universidad de Alberta probaron las nanopartículas a temperatu-ras de yacimiento y observaron que algunas con-servaban propiedades magnéticas aceptables.
Ahora, ambos grupos se están concentrando en las partículas resistentes a la temperatura y han iniciado estudios sobre el transporte. Los investigadores también están investigando una herramienta de susceptibilidad magnética de fondo de pozo que finalmente detectará los agen-tes de contraste presentes en las fracturas del yacimiento. Las partículas paramagnéticas simi-lares también pueden ser transportadas a través de las formaciones y utilizarse para mejorar la sensibilidad de las mediciones tradicionales de resonancia magnética, con una escasa o nula adaptación de las herramientas existentes.22
Recuperación mejorada de petróleoLa nanotecnología posee el potencial para mejo-rar la caracterización de yacimientos, mediante el mejoramiento de las técnicas de recolección de datos. No obstante, el mayor impacto sobre la industria quizás resida en el empleo de la nano-tecnología para incrementar el volumen de hidrocarburos recuperables, más allá de las capa-cidades de los métodos existentes de recupera-ción mejorada de petróleo. A esos efectos, se ha
> Apuntalante revestido con nanosensores. Un apuntalante sensor revestido especialmente se inyecta en las formaciones de interés mediante métodos tradicionales (izquierda). Cuando la fractura comienza a cerrarse, el apuntalante sensor mantiene la fractura abierta (centro). El apuntalante se estabiliza bajo la presión de la fractura en proceso de cierre e impide un grado posterior de contracción (derecha). Luego, el apuntalante puede detectarse mediante mediciones de la susceptibilidad magnética.
Formación objetivo
Tubería de revestimiento
Volumende la fractura
Apuntalante sensor
Apuntalantesensor en sitio
Volumen final de la fractura
Pérdida de volumende la fractura
Oilfield ReviewAutumn 10Nanotech Fig. 13ORAUT10-Nano Fig. 13
> Fabricación de nanopartículas de Janus. Los científicos producen una emulsión de agua, cera y nanopartículas de sílice; las nanopartículas de sílice se encastran parcialmente en las pequeñas gotas de cera (extremo superior izquierdo). En la fase siguiente, (extremo superior derecho) se agregan partículas de metal. Estas partículas se adosan solamente a la superficie expuesta de las partículas de sílice. Luego, la solución se seca al vacío, lo que remueve la cera y el agua, dejando las nanopartículas con un doble recubrimiento (extremo inferior izquierdo). El recubrimiento metálico de las superficies de las partículas permite que éstas atraigan los SWNT en la fase final del proceso (extremo inferior derecho).
Oilfield ReviewAutumn 10Nanotech Fig. 14ORAUT10-Nano Fig. 14
Emulsión de cera y agua
Partículasde sílice
Cera
Solución acuosa de partículas de metal
Metales
Secado en condiciones devacío a temperatura ambiente Partículas de sílice recubiertas con SWNT
SWNTs

Volumen 22, no. 3 51
demostrado que las nanopartículas son alta-mente personalizables y es posible desarrollarlas con muchas propiedades que pueden ser dispara-das en condiciones muy específicas. Por ejemplo, podrían inyectarse suspensiones de nanopartículas en formaciones agotadas para localizar la presen-cia de petróleo inmóvil y producir reacciones en sitio para liberar los hidrocarburos entrampados.
Los científicos de la Universidad de Oklahoma demostraron cómo pueden refinarse las nanopartí-culas de Janus para identificar, estabilizar y produ-cir reacciones en las interfaces agua-petróleo.23 Las nanopartículas de Janus, llamadas así por su naturaleza bifacial, poseen propiedades opuestas en sus dos extremos, tales como un lado hidrofó-bico y un lado hidrofílico. Estas características hacen que las nanopartículas posean una tenden-cia a la búsqueda de interfaces agua-petróleo. Mediante la fijación de catalizadores de metal,
tales como el paladio, en estas nanopartículas, los científicos también lograron inducir reacciones de migración de fases, a través del uso de la tempera-tura como control. Con la financiación del AEC, los científicos están explorando ahora el empleo de partículas con propiedades similares para movili-zar el petróleo remanente después del proceso de inyección de agua.24 Este recuso representa aproxi-madamente las dos terceras partes del petróleo original en sitio (OOIP).25
La creación de una partícula bipolar es un pro-ceso de múltiples etapas, que consiste en revestir las partículas hidrofílicas, tales como el sílice, con un componente hidrofóbico, tal como los SWNT (página anterior, abajo). En este caso, mediante el control de la concentración de SWNT en las partículas de sílice, los científicos pueden cam-biar el ángulo de contacto de hidrofóbico a hidro-fílico, pasando por el estado anfifílico. Luego,
mediante el depósito de los catalizadores en un lado específico de las nanopartículas, se pueden provocar reacciones tales como la oxidación, la reducción o la condensación en forma selectiva.
Los científicos de la universidad están visuali-zando métodos de recuperación secundaria y ter-ciaria, basados en la nanotecnología, con el objetivo final de extraer el 100% del OOIP. Su tra-bajo más reciente investiga la modificación de las propiedades reológicas de los hidrocarburos entrampados además del mejoramiento del des-empeño de los fluidos de inyección en cuanto a empuje (izquierda).
Revelaciones de la nanotecnologíaA medida que las operaciones de búsqueda y recuperación de petróleo se vuelven más comple-jas, a menudo se requiere nueva tecnología que reajuste lo que los operadores consideran prácti-cas estándar de exploración y producción. No obstante, el costo de la tecnología es un condicio-nante de lo que se conoce como hidrocarburos recuperables. El costo real de la nanotecnología para la industria del petróleo y el gas es en gran medida una incógnita, ya que actualmente existe casi por completo en investigación. Los factores de costo pueden incluir la reciclabilidad de las nanostructuras y los rendimientos de los proce-sos de fabricación, el saneamiento ambiental y la composición de los nanomateriales. El uso gene-ralizado de nanotecnologías similares en otras industrias también puede ayudar a bajar los cos-tos; por ejemplo, actualmente existe un mercado creciente para los nanomateriales en existencia.
Es probable que lo que ayude a sustentar la ejecución de más actividades de investigación y desarrollo nanotecnológicos sea la introducción de la primera herramienta comercial exitosa para la recuperación de hidrocarburos. En opinión de un grupo, esa herramienta estará representada por los agentes nanoescalares de contraste ya que podrán hacerse accesibles, resistentes, recupera-bles y reutilizables. Además, esta nanotecnología se integraría de manera fluida con los flujos de trabajo operacionales actuales, lo que significa que los operadores podrán optar por incorporar-los en sus paquetes de sensores como lo harían con cualquier otra herramienta de medición. Indudablemente, en la próxima década, el tér-mino “nanotecnología” se volverá mucho más familiar dentro del ámbito de E&P. —MJM
> Catálisis subterránea. Las nanopartículas catalíticas que se estabilizan en la interfase agua-petróleo pueden ser inyectadas con gases oxidantes (aire) o reductores (hidrógeno [H2] y monóxido de carbono [CO]) para producir reacciones que modifican la viscosidad del fluido de inyección y las propiedades reológicas de los fluidos, tales como las tensiones interfaciales agua-petróleo y roca-petróleo. El aire puede ser inyectado directamente, y el H2 y el CO podrían ser producidos en el lugar mediante la oxidación parcial del gas natural en el yacimiento. Este proceso posibilita la recuperación secundaria y terciaria de hidrocarburos.
Oilfield ReviewAutumn 10Nanotech Fig. 15ORAUT10-Nano Fig. 15
Emulsión denanopartículascatalíticasinyectadascon el aire
Pozo de inyección
Zona de catálisis
YacimientoPozo de producción
22. Yu H, Kotsmar C, Yoon KY, Ingram DR, Johnston KP, Bryant SL y Huh C: “Transport and Retention of Aqueous Dispersions of Paramagnetic Nanoparticles in Reservoir Rocks,” artículo SPE 129887, presentado en el Simposio sobre Recuperación Mejorada del Petróleo de la SPE, Tulsa, 24 al 28 de abril de 2010.
23. Crossley S, Faria J, Shen M y Resasco DE: “Solid Nanoparticles That Catalyze Biofuel Upgrade Reactions at the Water/Oil Interface,” Science 327, no. 5961 (1º de enero de 2010): 68–72.
Cole-Hamilton DJ: “Janus Catalysts Direct Nanoparticle Reactivity,” Science 327, no. 5961 (1º de enero de 2010):41–42.
24. Villamizar L, Lohateeraparp P, Harwell J, Resasco DE y Shiau B: “Interfacially Active SWNT/Silica Nanohybrid Used in Enhanced Oil Recovery,” artículo SPE 129901, presentado en el Simposio sobre Recuperación Mejorada del Petróleo de la SPE, Tulsa, 24 al 28 de abril de 2010.
25. Hartstein A, Kusskraa V y Godec M: “Recovering ‘Stranded Oil’ Can Substantially Add to U.S. Oil Supplies,” US Department of Energy Office of Fossil Energy (Oficina de Energía Fósil del Departamento de Energía de EUA, Project Fact Sheet (Hoja Informativa de Proyectos) (Febrero de 2006), http://fossil.energy.gov/programs/oilgas/publications/eor_co2/C_-_10_Basin_Studies_Fact_Sheet.pdf (Se accedió el 8 de noviembre de 2010).

52 Oilfield Review
El separador de próxima generación: Un cambio de reglas
Tradicionalmente, los operadores se vieron obligados a esperar hasta que todos los
fluidos de perforación y terminación fluyeran desde un yacimiento recién perforado
antes de hacer circular el flujo hacia el separador para su manipulación y medición.
El resultado fue la generación de largas demoras para la obtención de información
sobre la tasa de flujo y las características del fluido. Los cambios introducidos
recientemente en los componentes básicos del diseño de los separadores están
eliminando estas demoras, a la vez que proporcionan a los operadores resultados
más precisos.
Paul SimsClamart, Francia
Traducción del artículo publicado en Oilfield Review, Otoño de 2010: 22, no. 3.Copyright © 2011 Schlumberger.Por su colaboración en la preparación de este artículo, se agradece a Francis Allouche, Clamart, Francia; y a David Harrison y Richard Byrd, Sugar Land, Texas, EUA.CleanPhase y SmartWeir son marcas de Schlumberger.
Las pruebas de pozos se realizan en un intento por cuantificar las potenciales tasas de flujo de petró-leo, agua y gas de un yacimiento. Estas pruebas pueden efectuarse en cualquier punto del ciclo de vida de un campo: durante las fases de explo-ración y evaluación, desarrollo o producción. La información recogida de las pruebas de pozos y de otras mediciones es esencial para la caracte-rización precisa de los yacimientos y el diseño de estrategias destinadas a optimizar los nuevos desarrollos o mejorar el desempeño de los pozos y de los campos petroleros.1
Hasta hace poco, la tasa de flujo y las caracte-rísticas de los fluidos no podían cuantificarse mediante mediciones de los separadores hasta después de la limpieza del pozo; el período en el cual los detritos y los fluidos no hidrocarburífe-ros, introducidos en el pozo y en la formación por la actividad de perforación o las operaciones de disparos, se eliminan de la formación. La razón de esta demora es que los separadores convencio-nales no están diseñados para procesar los gran-des volúmenes de agua y sólidos que componen la mayor parte del efluente de limpieza.
El proceso de limpieza, en el que los fluidos que no son fluidos de yacimiento se desvían del separador a través de un colector múltiple de derivación y hasta un tanque compensador de baja presión, puede durar varias horas o días. Luego, una vez que el operador determina que el pozo sólo está produciendo fluidos de yacimiento, el flujo del colector múltiple es desviado manual-mente hacia el separador y los operadores pue-den comenzar a obtener mediciones de flujo.
Una larga tradición de servicioEn los separadores convencionales, el fluido fluye hacia uno de los extremos de un recipiente cilín-drico en el que golpea una placa deflectora de acero. La combinación de volumen expandido y velocidad reducida permite que la fuerza de gra-vedad inicie el proceso de separación natural de los fluidos de yacimiento —agua, petróleo y gas— de densidad variable.3 La eficiencia de esta metodología depende del tiempo, de modo que la clave para la separación óptima de fases es el tiempo de retención. Cuanto más tiempo pueden mantenerse los fluidos en el recipiente, más com-pleta será la separación.
Para mantener los fluidos un tiempo sufi-ciente en los recipientes tradicionales, existen placas vertedero que generan secciones indepen-dientes en el fondo del separador. En la primera sección después de la entrada, el petróleo y el agua se acumulan en el fondo del recipiente; el petróleo sube hacia la parte superior y fluye hacia una segunda sección por encima de la placa verte-dero, mientras que el agua más pesada queda en el fondo del recipiente en la primera sección. Dado que los fluidos pueden permanecer más tiempo en el separador, el gas escapa hacia el espacio vacío que existe por encima de los líqui-dos y es liberado a través de un extractor de vapo-res, en la parte superior del recipiente. El ascenso de los niveles de petróleo y agua levanta los flota-dores que, al alcanzar un valor predeterminado, disparan las válvulas de accionamiento neumá-tico situadas en el fondo del recipiente. Esto per-mite que el petróleo y el agua drenen hacia las
Si bien resultó útil para la industria durante muchos años, este proceso presenta ciertas defi-ciencias. Por ejemplo, una vez que los ingenieros determinan que el pozo ha eliminado el lodo de perforación y los detritos, redirigen los fluidos desde la línea de derivación hasta la entrada del separador que desestabiliza el flujo. Esta pertur-bación induce una demora porque el flujo debe reestabilizarse para poder obtener mediciones útiles. Por otro lado, dado que el efluente del pozo se hace fluir hacia el interior de un tanque de baja presión durante la limpieza, el técnico debe controlar la tasa de flujo y las presiones existentes en la superficie mediante un estrangu-lador ajustable. Esta tasa subóptima hace que sea más largo el tiempo requerido para llevar los flui-dos a la superficie y limpiar el pozo.
Es necesario el conocimiento de la historia de producción a lo largo de todo el período de la prueba, incluida la limpieza, para efectuar la inter-pretación moderna de la prueba de pozo. El hecho de contar con una historia de producción deta-llada ayuda a aplicar el concepto de deconvolución en la interpretación de las pruebas y permite que los analistas visualicen el yacimiento a más pro-fundidad.2 Los resultados de las pruebas son menos certeros cuando no se dispone de datos de tasas de flujo e información sobre los volúmenes producidos, como consecuencia de haber eludido el separador durante el período de limpieza. Por otro lado, es importante para los ingenieros moni-torear el desarrollo del período de limpieza, lo que no puede hacerse con precisión si los datos no son adquiridos y registrados correctamente.

Volumen 22, no. 3 53
líneas separadas, provistas de medidores, a medida que el gas sale por la salida situada en la parte superior del separador. Dadas las densida-des relativamente similares del petróleo y el agua, diseñar un flotador capaz de controlar en forma automática la salida del agua es problemá-tico y la mayoría de los operadores deben drenar manualmente la pata de agua.
Si bien ha sido utilizado en forma satisfacto-ria durante más de 25 años, este sistema presenta inconvenientes significativos. Dado que el reci-piente está diseñado para el flujo de fluidos de yacimiento, no puede admitir los volúmenes de agua y detritos que caracterizan a los fluidos de limpieza y, como se describió previamente, sor-tear el sistema implica tiempo de equipo de per-foración. Por otro lado, en cualquier momento a lo largo del período de duración de la prueba de flujo pueden producirse oleadas iniciales de petróleo y agua. Un incremento repentino del agua producida puede hacer que el agua sea des-cargada con el petróleo ya que el primer compar-timiento se inunda rápidamente.
A fin de contrarrestar estas posibilidades, los ingenieros de Schlumberger han desarrollado el separador de pruebas de pozos CleanPhase para manipular el flujo de fluido durante los períodos de limpieza y pruebas de yacimientos (derecha). Este nuevo separador posee cuatro característi-cas que lo diferencian de los separadores tradi-cionales: utiliza la tecnología de separación de fases SmartWeir para reemplazar las placas ver-tedero fijas, señales de radar en vez de flotadores para activar las válvulas de control, y medidores de flujo másico tipo Coriolis en lugar de los medi-dores de flujo volumétrico tradicionales; además, posee un compartimiento diseñado para la reco-lección y eliminación de los sólidos.
Una solución limpiaLos separadores convencionales no pueden mani-pular el proceso de limpieza y las oleadas porque la placa vertedero es una instalación permanente cuya altura —equivalente al 35% del diámetro interno (ID) del recipiente— no puede modifi-carse. Esto hace que el espacio disponible dentro del separador para contener el agua o el petróleo sea fijo. Por el contrario, los dispositivos SmartWeir pueden ser ajustados verticalmente para ubicar la admisión de petróleo —la entrada del reci-piente por la cual el petróleo separado fluye hacia la línea de petróleo y atraviesa el medidor de petróleo— en una posición que equivale a entre un 35% y un 64% del diámetro interno del recipiente.
1. Para obtener más información sobre las pruebas de pozos, consulte: Aghar H, Carie M, Elshahawi H, Gómez JR, Saeedi J, Young C, Pinguet B, Swainson K, Takla E y Theuveny B: “Nuevos alcances en pruebas de pozos,” Oilfield Review 19, no. 1 (Verano de 2007): 44–59.
2. La deconvolución es una operación matemática que, en este caso, utiliza las velocidades de flujo de superficie para convertir las mediciones de la presión de boca de pozo en una forma interpretable.
> Separador convencional y separador CleanPhase. Tanto los separadores convencionales (extremo superior) como los separadores CleanPhase (extremo inferior) están diseñados de manera que cuando el efluente ingresa en el recipiente, el fluido es retenido el tiempo suficiente como para que el petróleo se separe y flote hacia la parte superior del agua. Este proceso es optimizado mediante las placas deflectoras, que reducen la velocidad de flujo, y a través de las placas coalescentes que hacen que el petróleo forme gotas más grandes. En el separador convencional, el petróleo fluye luego a través de un vertedero hacia una sección independiente del recipiente, en tanto que agua permanece en otro compartimiento. Los brazos de control mecánico del nivel del agua y del petróleo—con flotadores adosados que son levantados por el fluido en ascenso—disparan las válvulas (no exhibidas) que liberan el petróleo y el agua a lo largo de sus respectivas líneas. A una altura predeterminada, producen la liberación de la presión de gas o de la presión de aire y el accionamiento de las válvulas neumáticas. Los extractores de vapores remueven las gotas de petróleo de la fase gaseosa antes de que el gas salga del separador a través de una línea situada en la parte superior del recipiente, en dirección hacia un medidor de placa de orificio (no exhibido). Las válvulas de seguridad permiten que el gas sea liberado en la atmósfera en vez de sobrepresionar el recipiente. El separador CleanPhase reemplaza la placa vertedero tradicional por un dispositivo SmartWeir cuya altura puede ser ajustada para admitir la fase dominante; el dispositivo SmartWeir incluye el mecanismo de admisión de petróleo. Los controladores mecánicos de nivel tradicionales son reemplazados por un sistema de radar de dos componentes que detecta las interfases gas-petróleo y agua-petróleo. Estas mediciones se vinculan con el nivel total del líquido y con los puntos de ajuste del espesor de la capa de petróleo, y proporcionan las señales que regulan la posición de las válvulas de petróleo y agua. En el fondo del recipiente, un vertedero de sólidos independiente recolecta los sólidos que a menudo acompañan a los fluidos durante la limpieza. Los sólidos pueden ser removidos a través de la línea de chorro de arena.
Oilfield ReviewAutumn 10CleanPhase Fig. 1ORAUT10-CLNPSE Fig. 1
Separador CleanPhase Sistema de radar
SistemaSmartWeir y admisiónde petróleo
Línea de chorro de arena Vertedero de sólidos
Pared antiespumante Líneade petróleo
Línea de agua
Línea de gasPlacas coalescentesVálvula de seguridad
Entrada de efluente
Placa deflectora
Controlador delnivel de agua y flotador
Controlador del nivel de petróleo y flotador
Extractorde vapores
Línea depetróleo
Línea de agua
Placa rompe vórtice
Antiespumante
Separador convencional
Placa vertedero
Ruptor de admisión
Oilfield ReviewAutumn 10CleanPhase Fig. 1ORAUT10-CLNPSE Fig. 1
Separador CleanPhase Sistema de radar
SistemaSmartWeir y admisiónde petróleo
Línea de chorro de arena Vertedero de sólidos
Pared antiespumante Líneade petróleo
Línea de agua
Línea de gasPlacas coalescentesVálvula de seguridad
Entrada de efluente
Placa deflectora
Controlador delnivel de agua y flotador
Controlador del nivel de petróleo y flotador
Extractorde vapores
Línea depetróleo
Línea de agua
Placa rompe vórtice
Antiespumante
Separador convencional
Placa vertedero
Ruptor de admisión
3. Katapodis L: “Oil and Gas Separation Theory, Application and Design,” artículo SPE 6470, presentado en la Reunión Regional de la Ciudad de Oklahoma, Ciudad de Oklahoma, Oklahoma, EUA, 21 al 22 de febrero de 1977.

54 Oilfield Review
El sistema de admisión de petróleo está fijado a la unidad SmartWeir y su altura es controlada por un posicionador (arriba). Para un desempeño óptimo, la admisión de petróleo tiene que estar ubicada en el centro de la capa de petróleo, que debe tener un espesor mínimo equivalente al 20% del diámetro interno del recipiente. El punto de admisión está diseñado para generar un flujo radial en la salida. Esto elimina la generación de un efecto de torbellino, en el que el arrastre (carryunder) puede tener un impacto perjudi-cial sobre las mediciones de la tasa de flujo y ade-más reduce el riesgo de fuga (blowby).4
Esta capacidad para aumentar y reducir la altura de la admisión de petróleo hace que la con-figuración interna del recipiente pueda ser modi-ficada en cualquier momento para admitir la fase de flujo dominante y de ese modo extender el tiempo de retención. Por ejemplo, durante la lim-pieza, la fase dominante suele ser agua. La gene-ración de niveles de agua altos en el separador hace que los fluidos permanezcan en éste más tiempo antes de ser descartados. En una etapa posterior de la prueba, la fase dominante será petróleo o gas y el sistema SmartWeir podrá ser ajustado en consecuencia para proporcionar
tiempos de retención más largos y mejorar, por consiguiente, el proceso de separación.
La capacidad para hacer fluir los fluidos de limpieza a través del separador es particular-mente ventajosa ya que permite a los operadores monitorear y medir el flujo con precisión, prove-yéndoles información acerca de los volúmenes de los fluidos de perforación y terminación de retorno. Además, dicha capacidad proporciona a los ingenieros una indicación temprana de la pro-ductividad del yacimiento.
Y, dado que los fluidos pueden ser dirigidos a través de un recipiente de 9,9 MPa [1 440 psi] en
> Posicionador neumático SmartWeir. Mediante la regulación manual de la deflexión angular θ del posicionador (azul) en su brazo de soporte (púrpura), utilizando un enlace electroneumático, es posible desplazar la admisión de petróleo (rojo) fijada al sistema SmartWeir (verde), hasta la altura deseada, como porcentaje del diámetro interno (ID) del recipiente. El límite superior de la admisión de petróleo del 64% (izquierda) y el límite inferior del 35% (derecha) son dictaminados por la envolvente de operación del mecanismo.
Posición inferior
0
10
20
30
40
50
60
70
80
90
100
Diám
etro
inte
rno
del r
ecip
ient
e, %
θ
64%
35%
Posición superior
0
10
20
30
40
50
60
70
80
90
100
Diám
etro
inte
rno
del r
ecip
ient
e, %
64%
35%
Oilfield ReviewAutumn 10CleanPhase Fig. 3ORAUT10-CLNPSE Fig. 3
Posición inferior
0
10
20
30
40
50
60
70
80
90
100
Diám
etro
inte
rno
del r
ecip
ient
e, %
θ
64%
35%
Posición superior
0
10
20
30
40
50
60
70
80
90
100
Diám
etro
inte
rno
del r
ecip
ient
e, %
64%
35%
Oilfield ReviewAutumn 10CleanPhase Fig. 3ORAUT10-CLNPSE Fig. 3
Posición inferior
0
10
20
30
40
50
60
70
80
90
100
Diám
etro
inte
rno
del r
ecip
ient
e, %
θ
64%
35%
Posición superior
0
10
20
30
40
50
60
70
80
90
100
Diám
etro
inte
rno
del r
ecip
ient
e, %
64%
35%
Oilfield ReviewAutumn 10CleanPhase Fig. 3ORAUT10-CLNPSE Fig. 3
Posición inferior
0
10
20
30
40
50
60
70
80
90
100
Diám
etro
inte
rno
del r
ecip
ient
e, %
θ
64%
35%
Posición superior
0
10
20
30
40
50
60
70
80
90
100
Diám
etro
inte
rno
del r
ecip
ient
e, %
64%
35%
Oilfield ReviewAutumn 10CleanPhase Fig. 3ORAUT10-CLNPSE Fig. 3
> Control de nivel. Las señales reflejadas de los pulsos de microondas (línea verde, derecha) enviados desde dos sensores de radar, situados en la parte superior del recipiente del separador (derecha), detectan el nivel total de líquido (TLL) y la interfase petróleo-agua en base a los contrastes de la constante dieléctrica (derecha). Mediante una sustracción simple se obtiene el espesor de la capa de petróleo (OLT). (Las dos señales de radar se exhiben como una por razones de conveniencia. Ambas señales de radar pueden ejecutar cualquiera de las dos mediciones pero el protocolo de transmisión las limita a una señal cada una). El radar OLT envía una señal de 4 a 20 mA a un convertidor electroneumático, que la convierte en una señal de 3 a 15 psi (extremo superior izquierdo). Luego, esta señal neumática es enviada al controlador neumático del OLT que abre la válvula de petróleo si el OLT se encuentra fuera de la configuración del controlador (extremo superior). El radar TLL pone en marcha el mismo método para abrir la válvula de agua si el TLL está fuera de la configuración del controlador.
Convertidorelectroneumático
Válvula decontrol de petróleo
Controladorneumático
Radar del espesorde la capa depetróleo (OLT)
Línea de petróleo
Punto de ajuste localOLT
20% a 65%
Convertidorelectroneumático
Válvula decontrol de agua
Radar denivel total delíquido (TLL)
Controladorneumático
Línea de agua
Punto de ajuste localOLT
40% a 65%
Nivel totalde líquido
Interfaseagua-petróleo
Radar
Oilfield ReviewAutumn 10CleanPhase Fig. 5ORAUT10-CLNPSE Fig. 5
Convertidorelectroneumático
Válvula decontrol de petróleo
Controladorneumático
Radar del espesorde la capa depetróleo (OLT)
Línea de petróleo
Punto de ajuste localOLT
20% a 65%
Convertidorelectroneumático
Válvula decontrol de agua
Radar denivel total delíquido (TLL)
Controladorneumático
Línea de agua
Punto de ajuste localOLT
40% a 65%
Nivel totalde líquido
Interfaseagua-petróleo
Radar
Oilfield ReviewAutumn 10CleanPhase Fig. 5ORAUT10-CLNPSE Fig. 5

Volumen 22, no. 3 55
lugar de los tanques compensadores de baja pre-sión, el pozo puede producir con regímenes más altos que los que son posibles con los escenarios de limpieza tradicionales. Esto significa que los operadores podrán ver y caracterizar los fluidos de yacimiento más rápido y ejecutar la prueba en menos tiempo. Con las tarifas actuales de los equipos de perforación, los ahorros generados por tales eficiencias pueden ser considerables.
En el separador CleanPhase, el petróleo y el agua no se encuentran en compartimientos de contención independientes. Eso significa que las válvulas de petróleo y agua no pueden abrirse con la acción de los flotadores como sucede con los separadores convencionales. Por el contrario, las válvulas son activadas por las señales iniciadas por un sistema de radar de dos componentes, fijado a la parte superior del separador. Uno de los componentes detecta el nivel total de líquido (TLL), en tanto que el otro registra la interfase agua-petróleo para el cálculo simple del espesor de la capa de petróleo (OLT). Cuando el controla-dor del radar detecta un valor de OLT predetermi-nado, emite una señal para un convertidor electroneumático que abre la válvula de la línea de petróleo. De un modo similar, cuando el nivel total de líquido es suficientemente alto, el radar TLL ejecuta los mismos pasos para abrir la válvula de agua (página anterior, abajo). El gas, si existe, fluye en forma continua a través de la salida de gas situada en la parte superior del separador.
Tasas de flujo másicoUna vez que los fluidos son separados en tres fases, las corrientes individuales pasan de los separadores a los medidores de flujo. A diferencia de los separadores convencionales, que utilizan medidores de flujo volumétrico, los separadores CleanPhase están provistos de medidores de flujo másico tipo Coriolis para medir las tasas de flujo de petróleo, agua y gas. La ventaja metrológica principal es que las mediciones obtenidas con el medidor tipo Coriolis son independientes de los cambios producidos en la densidad, la viscosidad, la presión o la temperatura del fluido. Además, carecen de piezas móviles y no requieren inter-vención manual como sí sucede con los medido-res convencionales de orificio.
Los medidores de flujo másico miden la masa del fluido. La sección de medición consta de dos tubos vibratorios en cuyo interior la corriente de fluido se divide de manera uniforme. Antes de que se inicie el período de flujo, una bobina de trans-misión hace que los tubos oscilen en forma ascen-dente y descendente, en sentido opuesto entre sí.
En la entrada y en la salida de cada tubo se dis-pone de transductores; bobinas con insertos mag-néticos. En uno de los lados de cada tubo se instala una bobina y los imanes en el otro. A medida que la bobina se desplaza a través del campo magné-tico del imán adyacente, la tensión generada crea una onda senoidal. Esto representa el movi-miento de un tubo respecto del otro: 180° en sen-tido opuesto, de modo que cuando uno se desplaza en forma ascendente el otro lo hace en forma descendente. Por consiguiente, las ondas senoidales generadas por los transductores de entrada y salida se encuentran en fase entre sí (arriba).
No obstante, durante el período de flujo, cuando el tubo se encuentra en la mitad ascen-dente de su ciclo, el fluido que fluye hacia su inte-rior crea una fuerza descendente. Luego, habiendo
absorbido el impulso ascendente del tubo a medida que se desplaza alrededor de su codo, el fluido que sale del medidor resiste las reducciones de su movimiento vertical mediante el empuje ascendente del tubo, lo que produce su torsión.
Esta torsión hace que las ondas senoidales generadas por los transductores se desfasen con-forme el lado de entrada se retrasa por detrás del lado de salida. Este desfase es la cantidad de tiempo existente entre las ondas senoidales y se mide en microsegundos. El desfase es directa-mente proporcional a la tasa de flujo másico.
>Medidores tipo Coriolis. En los separadores CleanPhase, los medidores tipo Coriolis son configurados como dos tubos paralelos en la línea de flujo. Cuando no hay flujo, la corriente que atraviesa los transductores (extremo superior izquierdo) genera ondas senoidales tanto en el lado de entrada como en el lado de salida del medidor (extremo inferior izquierdo y extremo superior derecho) que están en fase entre sí. El fluido que se desplaza a través de los tubos produce su torsión en direcciones opuestas (extremo inferior derecho) y hace que las ondas senoidales se desfasen en un factor Δt, que puede ser convertido en una tasa de flujo másico.
Oilfield ReviewAutumn 10CleanPhase Fig. 6ORAUT10-CLNPSE Fig. 6
Admisión de flujo
Salida de flujo
Onda senoidal
Imán
Transductor de entrada
Transductor de salida
Flujo
Lado de entrada
Lado de salida
Vista en planta
Lado de salida
Ausencia de flujo
Lado de entrada
Lado de salida
En fase
Transductor de entrada
Transductor de salida
Lado de entrada
Ausencia de flujo
4. El fenómeno de arrastre (carryunder) tiene lugar cuando las burbujas de gas libre salen del separador a través de la línea de petróleo. La fuga (blowby) es un caso único y más severo de arrastre, y se produce cuando el nivel de petróleo del separador cae hasta el punto en que sólo sale gas del recipiente a través de la línea de petróleo. Esto es particularmente peligroso porque puede generar sobrepresión en los tanques ubicados aguas abajo.
Δt

56 Oilfield Review
La frecuencia de vibración natural de los tubos es una función de la masa del tubo y del fluido. Si se conoce la frecuencia resonante natu-ral del tubo, es posible deducir la masa del fluido contenido en el tubo. La densidad se calcula fácilmente, dividiendo esa masa por el volumen conocido de los tubos. Los medidores utilizados en los separadores CleanPhase poseen un rango de operación que oscila entre 16 y 2 385 m3/d [100 y 15 000 bbl/d] de líquido, y entre 14 158 y 1 840 595 m3/d [0,5 y 65 MMpc/D] de gas.
Menos desechos, más precisiónEn muchos casos, se escoge la opción de hacer fluir los fluidos a través del separador durante la limpieza para ahorrar tiempo o deducir algo acerca del potencial del yacimiento, ya que éste descarga los fluidos no hidrocarburíferos o los detritos. Pero, dependiendo del ambiente de tra-bajo, quizás se obtengan retornos más inmedia-tos a partir de la capacidad para atrapar y separar los fluidos de limpieza desde el comienzo.
Por ejemplo, en el campo Franklin de alta pre-sión y alta temperatura, situado en el Mar del Norte, Total deseaba recuperar y reutilizar un fluido de terminación muy costoso, elaborado a base de salmuera de formiato de cesio. Con la tecnología
CleanPhase, los ingenieros de Schlumberger logra-ron recuperar 100 bbls [16 m3] del fluido, lo que se tradujo en un ahorro de USD 350 000 para el operador.
El hecho de hacer fluir los fluidos de limpieza a través del separador posee numerosas ventajas y constituye un elemento clave de la tecnología CleanPhase. Pero el principio facilitador subya-cente— el incremento del tiempo de retención para logar un proceso de separación más efectivo y, por consiguiente, mediciones más precisas— también puede agregar un valor considerable.
La importancia de la precisión se puso de manifiesto en otro ejemplo de África del Norte. Sirte Oil Company observó que las mediciones de la tasas de flujo que había obtenido para un campo importante, diferían considerablemente respecto de las de una compañía de pruebas independiente. Sirte, que dependía de la National Oil Corporation de Libia, sometió a prueba 22 pozos de producción del campo Lahib en su centro de medición de tasas de flujo. La producción total de petróleo y condensado, según Sirte, era levemente superior a 3 180 m3/d [20 000 bbl/d].
Mediante la utilización de un separador bifá-sico convencional, la compañía de servicio midió la tasa de flujo total de líquido y estimó la tasa de
flujo de petróleo, utilizando el corte de agua. Las pruebas realizadas por la compañía de servicio en 22 pozos indicaron una tasa de flujo total de petró-leo y condensado de 2 627 m3/d [16 500 bbl/d]; al menos un 17% inferior a las mediciones obteni-das en el centro de Sirte.
Sirte recurrió a Schlumberger para verificar el flujo acumulado, utilizando la tecnología CleanPhase. El separador de pruebas de pozos trifásicos fue equipado con medidores tipo Coriolis y un medidor electromagnético para monitorear la tasa de flujo de agua.
Debido a la eficiencia de la separación, cada una de las tres fases pudo ser medida con preci-sión. Las mediciones del sistema CleanPhase proporcionaron una tasa de flujo acumulado de 3 191 m3/d [20,068 bbl/d]; lo que representó una concordancia casi exacta con los resultados origi-nales del operador.
Luego Sirte realizó una prueba, colocando un separador convencional y un separador CleanPhase en serie, y obtuvo resultados casi idénticos (izquierda). No obstante, debido al tiempo y a las ventajas ambientales de no tener que sortear el separador durante la limpieza, la compañía optó por desmovilizar el separador convencional a favor del sistema CleanPhase para su empleo futuro en el campo.
Intereses más elevados Las pruebas de pozos constituyen un componente indispensable del éxito de los programas de exploración y producción. Las mediciones exac-tas de las tasas de flujo son esenciales para los pla-nes de desarrollo de campos petroleros. Junto con otros datos de entrada —mediciones derivadas de registros, mediciones de núcleos y mediciones obtenidas en la región vecina al pozo— el dimen-sionamiento de los pozos, sus localizaciones, el diseño de la infraestructura y numerosas decisio-nes de inversión dependen de lo que las pruebas de pozos revelan acerca de un yacimiento.
Hoy, no es común encontrar yacimientos de fácil desarrollo. Eso significa que la tarea de des-cubrir, producir y transportar hidrocarburos se ha vuelto más compleja y más costosa que nunca. A la vez, las recompensas potenciales en las fron-teras actuales también son más grandes. Estos escenarios con intereses significativos requieren que los responsables de la toma de decisiones reciban información más precisa y más completa en el menor plazo posible. —RvF
> Comparación entre separadores. Durante una campaña de pruebas de pozos de producción, llevada a cabo en el campo Lahib, se requirió la unidad CleanPhase para verificar la tasa de flujo acumulada de 22 pozos de producción. Mediante la utilización del separador CleanPhase, Schlumberger logró separar y medir cada fase con precisión. Se observó que la tasa de flujo combinado era casi idéntica a la tasa de producción mezclada.
15:00
15:15
15:30
15:45
16:00
16:15
16:30
16:45
17:00
17:15
17:30
17:45
18:00
18:15
18:30
2 645
2 638
2 664
2 691
2 630
2 667
2 567
2 579
2 652
2 624
2 659
2 544
2 517
na
2 509
Aguabbl/d
756
754
747
738
750
752
757
748
739
738
744
734
737
na
731
Petróleobbl/d
1,27
1,27
1,27
1,27
1,28
1,25
1,24
1,24
1,22
1,22
1,22
1,21
1,21
1,21
1,21
GasMMpc/D
2 634
2 628
2 621
2 621
2 618
2 620
2 621
2 597
2 571
2 568
2 565
2 565
2 565
2 548
2 532
Aguabbl/d
751
749
747
746
746
746
747
740
733
732
731
731
731
726
722
Petróleobbl/d
1,26
1,26
1,25
1,24
1,23
1,22
1,22
1,22
1,21
1,21
1,21
1,21
1,21
1,21
1,21
GasMMpc/D
Hora Tasas de producción conel separador del cliente
Tasas de producción conel separador CleanPhase
Oilfield ReviewAutumn 10CleanPhase Fig. 7ORAUT10-CLNPSE Fig. 7

Andrew R. Barron se encuentra al frente de la cátedra“Welch” de química y es profesor de ciencia de losmateriales en la Universidad de Rice, en Houston. Es el creador de los primeros programas educativosque abarcaron las facultades de ciencia, ingeniería y administración de la Universidad de Rice; además, está involucrado en los programas de la sección de la Universidad de Rice correspondiente a la Sociedad de Ingenieros Automotrices. En colaboración con laUniversidad de Alberta, el grupo de Andrew ha investi-gado los agentes de contraste utilizados en resonanciamagnética para la generación de imágenes de fracturasy yacimientos. Su primer posición fue la de investigadorasociado posdoctoral en la Universidad de Texas, enAustin, EUA. Obtuvo una licenciatura (con menciónhonorífica), una maestría, un doctorado y un diplomaDIC del Colegio Imperial de Ciencia y Tecnología de la Universidad de Londres, en Inglaterra.
Craig J. Beasley es jefe de geofísica de WesternGecocon base en Houston. En 1981, ingresó en WesternGeophysical para convertirse luego en vicepresidentemundial de investigación y desarrollo y vicepresidentemundial de procesamiento de datos. Recibió dos pre-mios Litton Technology, un premio Silver Award delprograma Performed by Schlumberger, y el premio ala Mejor Presentación de la SEG; y fue conferenciantedistinguido de Esso Australia. Fue primer vicepresi-dente y presidente de la SEG y conferenciante distin-guido de la SEG. Fue presidente fundador del ComitéFundacional de Geocientíficos sin Fronteras de laSEG, recién formado. Asociado de Schlumberger, es miembro honorario de la Sociedad Geofísica deHouston y miembro extranjero de la Academia deCiencias Naturales de Rusia. Ha presentado artículos y posee numerosas publicaciones sobre una diversidadde tópicos, tales como la generación de imágenes de la pared del pozo antes del apilamiento, la migración y la adquisición. Craig obtuvo una licenciatura de la Universidad de Houston; una maestría de laUniversidad de Emory, en Atlanta, Georgia, EUA; y un doctorado de la Universidad del Norte de Texas, en Denton, todos en matemáticas.
Bjarne Bennetzen se desempeña como superinten-dente de perforación para Maersk Oil Qatar AS(MOQ), con base en Doha, Qatar. Desde 1993 hasta1998, Bjarne trabajó para Schlumberger Dowell comosupervisor de operaciones con tubería flexible en elMar del Norte y Dinamarca. En el año 2005, se convirtió en supervisor de perforación para Maersk enTurkmenistán y el Mar del Norte; asumió su posiciónactual en el año 2006. Bjarne posee una licenciaturaen ingeniería marina.
Emmanuel Bize comenzó su carrera como geocientífico senior en el Centro de Investigación de Carbonatos de Schlumberger en Dhahran, ArabiaSaudita, trabajando en sistemas de porosidad y en suimpacto sobre el flujo en los carbonatos. Con base enRío de Janeiro, actualmente se desempeña como geólogo de dominio senior a cargo tanto del soportetécnico para las herramientas de geología como de lastécnicas de procesamiento e interpretación avanzadaen evaluación de yacimientos para el GeoMarket* deBrasil. Antes de trabajar en Brasil, estuvo a cargo de la geología para la región de Europa continental.Emmanuel, cuyos intereses actuales son la cuantifica-ción de los sistemas de fracturas, la cuantificación
de los sistemas de porosidad y sus aplicaciones a los sistemas globales de tipificación de rocas, obtuvo una licenciatura en sedimentología y paleontología de la Universidad Claude Bernard, en Lyon, Francia.
Austin Boyd es gerente de petrofísica en el Centro de Investigaciones y Geoingeniería de SchlumbergerBrasil, en Río de Janeiro. Antes de ser trasladado aBrasil, fue jefe de dominio de petrofísica paraSchlumberger Data and Consulting Services. Ocupó una diversidad de posiciones de desarrollo de interpretación en investigación e ingeniería, tantoen EUA como en Medio Oriente. Austin ingresó enSchlumberger en 1981 como ingeniero de campo después de obtener una licenciatura en ingenieríaeléctrica de la Universidad Técnica de Nueva Escocia en Halifax, Canadá.
Ahmed A. Busnaina es director del Centro de Cienciae Ingeniería Nanoescalares para Nanomanufactura de Alto Rendimiento de la Fundación Nacional deCiencias (NSF) y profesor y director del Centro deControl de la Microcontaminación de la NSF, en laUniversidad del Noreste en Boston, Massachussets,EUA. Recibió el premio Nanotech Briefs NationalNano50 en la categoría innovadores, el premioOutstanding Faculty, Soren Buus Outstanding Researchy el premio a la Aspiración, ambos de la Universidad delNoreste. Fue colaborador del Handbook of Nanoscience,Engineering, and Technology, segunda edición, y editor del Nanomanufacturing Handbook. Organizómás de 80 conferencias, talleres y simposios y es autorde más de 420 artículos. Ahmed posee un doctorado en ingeniería mecánica de la Universidad Estatal deOklahoma, en Stillwater, EUA.
João Carlos de Luca es presidente del InstitutoBrasileño de Petróleo, Gas y Biocombustibles. Suamplia carrera en la industria del petróleo y el gasincluyó los cargos de gerente general para la cuencade Campos, director gerente de E&P, miembro delDirectorio de Petrobras y asesor del Directorio deBraspetro (Petrobras International). Ayudó a fundar la subsidiaria brasileña de YPF, fue miembro del directorio de YPF y posteriormente se convirtió en presidente de Repsol YPF Brasil. Además, presidió el 17o Congreso Mundial del Petróleo realizado en Río de Janeiro en el año 2002 y fue miembro de laJunta Ejecutiva del Congreso Mundial del Petróleo.João es ingeniero civil con títulos académicos de laUniversidad Federal de Paraná, en Curitiba, Brasil.
Geoff Downton es gerente de desarrollo de productosde segmento para Schlumberger D&M y asociado deSchlumberger, con base en Stonehouse, Inglaterra.Comenzó su carrera en el año 1976 como ingeniero en Sperry Gyroscopes, en Inglaterra, compañía que se convirtió en British Aerospace en 1983. En BritishAerospace, pasó de desempeñarse como ingenieroprincipal senior a trabajar como jefe de proyectos ensistemas de seguimiento, guía y control de navegación.En el año 1989, se incorporó en la industria nuclearcomo oficial de investigación. Se convirtió en gerentede programas, primero en el Laboratorio de IngenieríaMarchwood de la Junta Central de Generación deElectricidad en Southampton, Inglaterra, y luego enNuclear Electric en el Laboratorio de Ingeniería deBerkeley, donde desarrolló robots para inspeccionar,reparar y poner fuera de servicio reactores nucleares.En 1998, ingresó en Camco (adquirida posteriormente
por Schlumberger) como gerente de ingeniería para el sistema de perforación rotativa direccionalPowerDrive*. Actualmente preside la sección técnicade automatización de sistemas de perforación de laSPE. Geoff obtuvo una licenciatura (con menciónhonorífica) de la Universidad de Birmingham, unamaestría en ingeniería de sistemas de control de laUniversidad de la Ciudad de Londres y un doctoradoen cibernética de la Universidad de Brunel, enUxbridge, todas en Inglaterra.
John R. Dribus es asesor global de geología paraSchlumberger. Con base en Nueva Orleáns, se desem-peña como geólogo de yacimiento con más de 30 añosde experiencia en el Golfo de México; su enfoqueactual se centra en las cuencas del margen delAtlántico. Sus funciones han abarcado todos los aspec-tos de la geología de exploración, explotación y pro-ducción para Schlumberger y para una importantecompañía de petróleo y gas, incluyendo más de 15 añosen el área de aguas profundas del Golfo de México y cinco años como geólogo de un campo de uranio. Sus áreas de conocimientos técnicos especializadosabarcan el análisis de los sistemas petroleros, los aná-logos de aguas profundas, el análisis de riesgos geoló-gicos y la formación en geociencias. Actualmente,John preside el Capítulo Delta del Instituto Americanodel Petróleo e integra las Comisiones de DivulgaciónPública y de la Competencia Barril Imperial de laAsociación Americana de Geólogos de Petróleo (AAPG).Posee una licenciatura y una maestría en geología dela Universidad Estatal de Kent, en Ohio, EUA.
Joseph Carl Fiduk es jefe de geología paraWesternGeco, con base en el Centro de Excelencia en Construcción de Modelos del Subsuelo en Houston.Trabajó para el Servicio Geológico de EUA (USGS), Gulf Oil, Discovery Logging, la Dirección de GeologíaEconómica de Texas, BP, la Universidad A&M de Texas, laUniversidad de Colorado, y como consultor privado. Carldicta clases de formación profesional para Schlumbergery cursos industriales para Nautilus Corporation y parasociedades geológicas con base en Houston. Obtuvo unalicenciatura y una maestría de la Universidad de Floridaen Gainesville, EUA; una maestría en administración de empresas de la Universidad de Texas de la cuencaPérmica en Odessa; y un doctorado en geología y geofísica de la Universidad de Texas en Austin.
Marcelo Frydman se desempeña como asesor cientí-fico en el Centro de Investigaciones y Geoingeniería de Schlumberger en Río de Janeiro. Comenzó su carreraindustrial trabajando en proyectos de investigación,brasileños e internacionales, en el Grupo de Tecnologíae Ingeniería Petrolea de la Universidad Católica de Río de Janeiro (PUC-Río). Después de ingresar enSchlumberger en el año 2001, se desempeñó comogerente de geomecánica de aguas profundas, gerente de geomecánica y gerente de servicios geomecánicos en América Latina. Antes de ocupar su posición actualen el año 2009, supervisó el grupo de geomecánica enAmérica Latina durante dos años. Autor de diversosartículos e informes, se ha involucrado en numerososestudios geomecánicos relacionados con cuestiones deestabilidad de pozos, manejo de la producción de arena,geomecánica de yacimientos, tecnología sísmica 4D ymodelado de tratamientos de fracturamiento hidráu-lico. Marcelo obtuvo una licenciatura, una maestría y un doctorado en ingeniería civil de la PUC-Río.
Volumen 22, no.3 57
Colaboradores

John Fuller es asesor de geomecánica paraSchlumberger Data and Consulting Services enGatwick, Inglaterra. Actualmente está a cargo de la formación profesional dentro de la comunidad geo-mecánica de Schlumberger. Ingresó en Schlumbergercomo ingeniero de campo especialista en operacionescon cable en 1980, desempeñando cargos en AbuDhabi, Turquía, Jordania, Siria, Egipto y Dubai. En el año 1990, se desplazó a Europa para concen-trarse en geomecánica; este trabajo incluyó el desarro-llo de técnicas geomecánicas en el Departamento deGeomecánica del Centro de Investigaciones deSchlumberger en Cambridge, Inglaterra. Durante losúltimos 20 años, ayudó a desarrollar el negocio de geo-mecánica de Schlumberger, dirigiendo numerosos pro-yectos de soporte de las operaciones de construcciónde pozos, tanto operaciones de perforación como determinación, y llevando a cabo el desarrollo general delos campos petroleros. Además fue vicepresidente téc-nico para el capítulo Londres de la SPWLA y miembrodel comité directivo del Foro SPE 1999 sobre proble-mas de producción de arena. John obtuvo una licenciatura en física de la Universidad de Portsmouth en Inglaterra.
Steve Gómez es gerente de un proyecto de tractorespara el segmento de Wireline del Centro Integrado de Productividad y Operaciones con Cable deSchlumberger en Sugar Land, Texas. Comenzó sucarrera como ingeniero mecánico en el equipo deSchlumberger que desarrolló la herramientaSlimPulse* MWD. En el año 2002, se desempeñó comogerente de proyectos para el desarrollo de la herra-mienta TeleScope*, un componente clave de la familiade herramientas LWD Scope* de Schlumberger. En elaño 2005, se incorporó al programa de Excelencia enDesarrollo Educativo (SEED) de Schlumberger y dirigió la introducción de la robótica a los alumnos de las comunidades insuficientemente atendidas detodo el mundo. Steve colaboró con el Laboratorio deMedios del Instituto Tecnológico de Massachussets(MIT) en Cambridge, Massachussets, la Universidadde Massachussets, la Universidad de Rice en Houston y la Universidad de Texas, en Austin, para que losalumnos de escuelas primarias y secundarias tuvieranacceso a la formación en tecnología robótica. Además,dirige el grupo de intereses especiales en robótica deSchlumberger. Steve obtuvo una licenciatura del MIT y una maestría en robótica de la Universidad deStanford en Palo Alto, California, EUA.
Marc Haci es vicepresidente de operaciones para el sistema automatizado de control de rotación desuperficie SLIDER*, en Schlumberger. Comenzó sucarrera en 1990 como miembro del cuerpo docente de la Universidad Técnica de Estambul en Turquía. En 1993, se desempeñó como investigador asociado enel Instituto Francés del Petróleo, en Ruel-Malmaison,Francia, y al año siguiente ingresó en DrillingManagement International, Inc. en Houston, para tra-bajar como gerente de operaciones y vicepresidente de servicios de perforación direccional. En el año2000, inauguró y dirigió la sucursal norteamericana de Welltec, Inc. Dos años después, ingresó en NobleDrilling para ayudar a desarrollar la tecnología de per-foración robótica, siendo luego cofundador de SLIDER,LLC. Marc obtuvo una licenciatura de la UniversidadTécnica de Estambul y una maestría y un doctorado dela Universidad Estatal de Luisiana, en Baton Rouge,EUA, todas en ingeniería petrolera.
Erhan Isevcan se desempeña como gerente de serviciosde perforación de Schlumberger en Doha, Qatar.Comenzó su carrera en Telsim Telecommunications en Estambul, Turquía, en el año 1999. Ingresó enSchlumberger en París como campeón de productospara las tarjetas SIM antes de ser trasladado aNoyabrsk, en Rusia, como ingeniero especialista en operaciones MWD y operaciones de perforación direc-cional en el año 2003. Erhan trabajó como ingenieroespecialista en perforación direccional y gerente delcentro de perforación en Oklahoma City, Oklahoma,antes de ocupar su posición actual en Doha en el año2007. Posee una licenciatura en ciencias de la computa-ción de la Universidad de Galatasaray en Estambul.
Yung Joon Jung se desempeña como profesor auxiliaren el Departamento de Ingeniería Mecánica eIndustrial de la Universidad del Noreste, en Boston,Massachussets. Su trabajo en el desarrollo de un sensorquímico multifuncional, basado en el empleo de redesde nanotubos de carbono de pared simple (SWNT), alta-mente organizadas, ha sido financiado por el Consorciode Energía de Avanzada (AEC). Trabajó en la síntesis,procesamiento y aplicaciones de materiales nanoestruc-turados de carbono durante más de 10 años, primerocomo estudiante del doctorado y luego como asociadopostdoctoral en el Instituto Politécnico Rensselaer, enTroy, Nueva York, EUA, y desde 2005 como profesor auxiliar en la Universidad del Noreste. Sus actividadesde investigación actuales se centran en la síntesis controlada y el autoensamblaje enfocado de los SWNT y en su integración en dispositivos funcionales, así como en la síntesis de los materiales nanoestructuradosde grafito de pequeñas dimensiones.
Mazen Y. Kanj es ingeniero de petróleo especialistadel Equipo de Tecnología de Ingeniería de Yacimientos(RETT) del Centro de Investigaciones Avanzadas delCentro de Ingeniería de Exploración y Petróleo deAramco (EXPEC ARC) con base en Dhahran, ArabiaSaudita. Además, es campeón del Área de Enfoque para las tecnologías de detección e intervenciones de yacimientos en sitio, en Saudi Aramco. Antes deingresar a la compañía en el año 2003, se desempeñócomo investigador científico senior en el Instituto de Poromecánica de la Universidad de Oklahoma, en Norman. En ese instituto, dictó diversas clases de ingeniería y un curso sobre mecánica de rocas. Fue miembro invitado de la comisión de poromecánicade la división de mecánica de ingeniería de la SociedadAmericana de Ingenieros Civiles y editor asociado para SPE Journal. Mazen obtuvo una licenciatura y una maestría de la Universidad Americana de Beirut,en Líbano, y un doctorado de la Universidad deOklahoma, todos en ingeniería civil.
Tony Krepp se desempeña como vicepresidente senior de servicios técnicos para K&M Technology, una división de Schlumberger, con base en TheWoodlands, Texas. Comenzó su carrera como ingenierode perforación en Esso Australia; su trabajo incluyóproyectos de pozos horizontales y de alcance exten-dido en los programas de perforación de Mackerel,Fortescue, Tuna, West Tuna y Moonfish. Junto con Mike Mims, cofundador de K&M Technology, recibieronel premio Excelencia en Ingeniería 1996 del Institutode Ingenieros de Australia, por los avances logrados en las tecnologías de perforación de pozos de alcanceextendido (ERD). Tony desempeñó roles de liderazgo y diseño de ingeniería en muchos de los proyectos depozos ERD y pozos complejos, que batieron récords anivel mundial y que incluyeron a BP Niakuk, Exxon
Sacate, ExxonMobil Sakhalin Island y ChevronPetronius. Autor de numerosos artículos técnicos, Tony posee una licenciatura en ingeniería mecánica y ciencias de la computación de la Universidad deMonash en Melbourne, Victoria, Australia.
Eric Maidla se desempeña como vicepresidente dedesarrollo de negocios de Schlumberger para el sistema automatizado de control SLIDER. Es copropie-tario de TDE Thonhauser Data Engineering (GmbH) y presidente de su subsidiaria norteamericana.Además, es fundador y copropietario de Nexen DataSolutions Inc, compañía consultora que se dedica alanálisis de datos, y de Genesis Lone Star, LLC. En1988, fundó y presidió el Departamento de IngenieríaPetrolera de la Universidad Estatal de Campinas, enSan Pablo, Brasil. Luego, ayudó a poner en operaciónel grupo de investigaciones de perforación de laOrganización de Investigación Científica e Industrialdel Commonwealth (CSIRO), la agencia nacional de ciencias de Australia. En el año 2001, fue vicepresi-dente de desarrollo de negocios para NobleEngineering and Development en Sugar Land. Integra el Comité Asesor de la Industria Petrolera de la Universidad Estatal de Luisiana (LSU) y ocupónumerosas posiciones en la Comisión de Perforaciónde la SPE y la IADC. Titular de numerosas patentes yautor de más de 50 artículos técnicos, Eric obtuvo unalicenciatura de la Escola de Engenharia Maua, en SanPablo, Brasil, además de una maestría y un doctoradoen ingeniería petrolera de la LSU, en Baton Rouge.
Richard Meehan comenzó su carrera en 1985 en el Centro de Investigaciones de Schlumberger enCambridge, Inglaterra, donde se concentró en las propiedades físicas de las lutitas, las vibraciones de la columna de perforación, la sísmica de pozo y los sistemas de telemetría para las mediciones durante la perforación. Desde el año 2000 hasta el año 2006, trabajó en Texas como gerente de sección para los productos de interpretación de perforación y comogerente de línea de productos para el software de perforación. En el año 2006, se convirtió en gerente de desarrollo de productos para el software de perforación en el Centro GeoScience de Schlumbergeren Beijing, China. Asumió su posición actual comogerente de integración para el Grupo de Tecnología de K&M en The Woodlands, Texas, en el año 2008.Richard obtuvo una licenciatura en ingeniería mecánica de la Universidad de Strathclyde en Glasgow,Escocia, y una maestría en energía termal del Institutode Tecnología Cranfield en Bedfordshire, Inglaterra.
Nelson Mohammed se desempeña como ingeniero de perforación principal de Schlumberger para opera-ciones de perforación de pozos de alcance extendido.Ingresó en Schlumberger en 1980 como ingenieroespecialista en operaciones con cable, en Canadá.Después de una carrera de campo de 15 años, ocupódiversas posiciones directivas y técnicas en Europa,Asia, Australia, Rusia y Medio Oriente. Nelson desem-peñó roles clave en diversos proyectos de pozos ERD,líderes en la industria, que abarcan desde su posiciónde perforador direccional principal para el proyectoWytch Farm de BP, en 1995, a la posición de asesor de ingeniería para la prueba de concepto del campoManifa en Arabia Saudita. Actualmente, está involu-crado en el proyecto de perforación de pozos ERD del campo Odoptu en Sakhalin Island, Rusia. Nelsonobtuvo una licenciatura en ingeniería física de laUniversidad McMaster, en Hamilton, Ontario, Canadá.
58 Oilfield Review

Jobel L.P. Moreira obtuvo su licenciatura en geologíade la Universidad Federal de Para en Brasil. Fue gerente del equipo de interpretación de Petrobraspara la porción norte de la cuenca de Santos desde elaño 2008. Ingresó en Petrobras en 1980, trabajando engeología para operaciones para la cuenca de Campos.Desde 1989 hasta 1996, como miembro del equipo deinterpretación para la cuenca de Campos, propusodiversas áreas prospectivas de exploración en los cam-pos Barracuda, Caratinga, South Marlim y EastMarlim. Después de obtener su doctorado en cienciasde la tierra de la Universidad de Rennes, en Francia,Jobel tuvo a su cargo la evaluación de la estratigrafía,los sistemas depositacionales y los sistemas petrolerospara el equipo de interpretación de la cuenca de Santos.
Antonio C. Capeleiro Pinto es gerente del equipo dediseño de proyectos de desarrollo de Petrobras para elproyecto presalino de la cuenca de Santos desde el año2008, con base en Río de Janeiro. Ingresó en Petrobrasen el año 1983 para trabajar en operaciones de manejode yacimientos y simulación de flujo. En 1994, se incor-poró en el equipo de proyectos asignado al desarrollodel complejo Marlim y posteriormente fue coordinadorde yacimientos de ese equipo. Su misión siguiente fuela coordinación del programa de Petrobras de produc-ción de petróleo pesado en el área marina. Además,fue gerente del grupo de tecnología de yacimientos del Centro de Investigaciones de Petrobras (CENPES)desde el año 2003 hasta el año 2006 y, posteriormente,jefe del equipo de proyectos de desarrollo de fase temprana del Departamento de E&P. Autor de más de40 artículos técnicos, la sección brasileña de la SPEdesignó a Antonio profesional del año en excelenciatécnica. Posee una licenciatura en ingeniería eléctricadel Instituto Militar de Ingeniería (IME), en Río deJaneiro, y una maestría en ingeniería petrolera de laUniversidad de Campinas, en San Pablo, Brasil.
David Potter es profesor del Departamento de Física y del Departamento de Ciencias de la Tierra y CienciasAtmosféricas de la Universidad de Alberta, enEdmonton, Canadá. Además es director del programade la maestría de ciencias en Geociencias Integradasdel Petróleo (IPG). En colaboración con laUniversidad de Rice, el grupo de David ha investigadolos agentes de contraste para uso en resonancia magnética para la generación de imágenes de fracturas y yacimientos.
Jean-Francois Poupeau es presidente del grupo deoperaciones de perforación de Schlumberger, con baseen Houston. Comenzó su carrera en Schlumberger enel año 1985 como ingeniero de campo de Wireline, enel Golfo de México. Desde entonces, Jean-Francoisocupó diversos cargos en Europa, Asia, África y EUA.Obtuvo una licenciatura en geología y una maestría en ingeniería petrolera, ambas de la Universidad deTulane en Nueva Orleáns.
Daniel Resasco se encuentra al frente de la CátedraBourne de la Facultad de Ingeniería de MaterialesQuímicos y Biológicos de la Universidad de Oklahoma,en Norman. Además, es profesor George Lynn Cross, el máximo honor en investigación que concede laUniversidad. Recibió el premio Químico del Año deOklahoma, que otorga la Sociedad Química Americana;el premio Yale por el avance de las ciencias básicas yaplicadas, que otorga la Asociación de Ciencia eIngeniería de Yale, Universidad de Yale, New Haven,Connecticut, EUA; fue premiado con la beca Regentspor las actividades de Investigación Superior y obtuvo lacátedra Sam A. Wilson de la Universidad de Oklahoma.
El trabajo de su grupo sobre nanohíbridos a base desílice/SWNT interfacialmente activos fue seleccionadopor el AEC para ser aplicado en la industria del petróleoy el gas. Daniel obtuvo su licenciatura en ingeniería quí-mica de la Universidad Nacional del Sur, en Bahía Blanca,Argentina, y un doctorado de la Universidad de Yale.
Charles Royce es vicepresidente de ventas y mercadeode Oceaneering International, Inc., en Houston.Comenzó su carrera en el área de los vehículos opera-dos en forma remota (ROV), en 1976, como operadorde ROV marinos para Martech y trabajó en el Golfo de México, la Costa Oeste de EUA y Brasil. Además,trabajó para Jered, la primera compañía de serviciosque se especializó en vehículos ROV, y para PerryOceanographics, una compañía fabricante de ROV. Se desempeña en Oceaneering desde 1988, donde ha ocupado diversos cargos de venta. Charles obtuvouna licenciatura de la Universidad de Houston.
Paul Sims se desempeña como campeón de productosde Schlumberger con base en Clamart, Francia. Es responsable de la dirección del desarrollo de nue-vos productos y de la introducción de las pruebas desuperficie y de las ameradas. Ingresó en Schlumbergeren el año 2004 como ingeniero de campo, en Australia,antes de convertirse en gerente de servicios de campoy luego gerente de localizaciones para MalasiaOriental, Brunei y Filipinas. Paul posee licenciaturasen ingeniería petrolera y en finanzas, ambas de laUniversidad de Australia Occidental en Perth.
Sivasubramanian Somu se desempeña como investi-gador científico asociado en el Centro de Ciencias eIngeniería Nanoescalares para Nanomanufactura deAlto Rendimiento de la Fundación Nacional deCiencias (NSF), en la Universidad del Noreste enBoston, Massachussets. Es autor de más de 50 artícu-los de publicaciones y actas de conferencias y sedesempeña como árbitro para diversas publicacionesde ciencia e ingeniería. Cuenta con más de siete añosde experiencia en métodos de fabricación estándarpara dispositivos de estado sólido, sistemas nanoelec-tromecánicos y diversos dispositivos magnéticos con su caracterización. Sus proyectos actuales incluyen eldesarrollo de nanointerruptores biestables, sensoresquímicos multifuncionales basados en nanotubos decarbono de pared simple (SWNT) y estudios de trans-porte electrónico en SWNT. Obtuvo su doctorado enfísica de la Universidad del Noreste.
Kumud Sonowal se desempeña como especialista en soporte técnico de perforación para ZakumDevelopment Company en Abu Dhabi, Emiratos Ára-bes Unidos. Antes de ingresar en Schlumberger comoingeniero especialista en perforación direccional en el año 2006, trabajó como ingeniero de perforaciónsenior en Oil India Limited, donde comenzó su carreraen 1999. Además, se desempeñó como ingeniero deoperaciones de perforación para Maersk Oil, en AbuDhabi, desde el año 2009 hasta el año 2010. Kumudposee una licenciatura en ingeniería minera de laEscuela de Minas de la India, en Dhanbad, Jharkhand, India.
James M. Tour se desempeña como profesor de quí-mica, ciencias de la computación e ingeniería mecá-nica y ciencia de los materiales en la Universidad deRice en Houston. Allí se especializa en diversas áreasde investigación de la nanotecnología. Luego de inte-grar 11 años el cuerpo docente del Departamento deQuímica y Bioquímica de la Universidad de Carolinadel Sur en Columbia, EUA, ingresó en el Centro deCiencias Nanoescalares de la Universidad de Rice
para concentrarse en diversas áreas de la nanociencia,incluida la investigación del carbón verde para la recu-peración mejorada de petróleo y la extracción ecoló-gica de petróleo y gas. El trabajo de su grupo sobre lautilización de nanomateriales de carbono funcionaliza-dos para ayudar a determinar la información química yambiental de fondo de pozo fue financiado por el AEC.Miembro de la Asociación Americana para el Avancede la Ciencia, recibió el premio Feynman en nanotec-nología y el premio al logro en nanotecnología delCentro de Tecnología de Houston. James obtuvo sulicenciatura en química de la Universidad de Siracusa,en Nueva York; su doctorado en química organometá-lica y química orgánica sintética de la Universidad dePurdue, en Lafayette Oeste, Indiana, EUA; y realizócursos postdoctorales en química orgánica sintética enla Universidad de Wisconsin, en Madison, EUA, y en laUniversidad de Stanford en Palo Alto, California.
John Ullo obtuvo una licenciatura en física delInstituto Politécnico Rensselaer en Troy, Nueva York, y un doctorado en física nuclear del Instituto deTecnología de Massachussets en Cambridge. Ahora, sedesempeña como consultor independiente sobre inicia-tivas de investigación futuras, luego de una carrera de30 años en la Schlumberger Technology Corporation.Muchos de sus intereses actuales incluyen la adaptaciónde las nuevas nanotecnologías y aplicaciones a los pro-blemas de exploración y extracción de petróleo y gas, yel manejo a largo plazo de subproductos tales como eldióxido de carbono. Estos abarcan nuevos materiales ysistemas de sensores para operaciones en ambientesrigurosos y la nueva exploración de los procesos funda-mentales que rigen el transporte de fluidos y partículasen medios porosos complejos. John integra los comitésasesores externos de la Universidad A&M de Texas, enCollege Station (Ingeniería Nuclear); la Universidaddel Noreste (Centro de Nanomanufactura de AltoRendimiento); Universidad de Princeton en NuevaJersey, EUA (Ingeniería Civil y Ambiental); Universidadde Boston (Consejo de Liderazgo para la Facultad deIngeniería y el Grupo de Asesoramiento para losPremios Ignition); Universidad de Texas (AEC); y elLaboratorio Nacional de Oak Ridge (PRIMER Centrode Investigaciones de Fronteras Energéticas).
Andrea Zerilli se desempeña como investigador cien-tífico en el Centro de Investigación y Geoingeniería deSchlumberger Brasil en Río de Janeiro. Con más de 30 años en la industria petrolera y experiencia mun-dial en actividades de Investigación y Desarrollo, susintereses incluyen las tecnologías electromagnéticas(EM) emergentes, de lectura profunda, las nuevas tec-nologías EM marinas de alta resolución y tecnologíasgeofísicas integradas para el fondo marino, el desarro-llo de soluciones integradas y el manejo de proyectosmultidisciplinarios de Investigación y Desarrollo y pro-yectos de múltiples productos. Antes de ingresar enSchlumberger en el año 2003, trabajó para la Eni, enItalia, como líder de proyectos de investigación, paraKMS Technologies en Houston como director de geofí-sica integrada, para el Servicio Geológico de EUA enDenver como científico visitante, para la Escuela deMinas de Colorado en Golden, EUA, como investigadorasociado, y para la Universidad Macquarie, en NorthRyde, Sydney, New South Wales, Australia.Conferenciante invitado y organizador de muchas reuniones de sociedades técnicas, Andrea posee unalicenciatura en ciencias de la tierra de la Universidadde Parma en Italia.
Volumen 22, no.3 59
Se utiliza un asterisco (*) para denotar una marca de Schlumberger.

Oilfield Review60
NUEVAS PUBLICACIONESPróximamente en Oilfield Review
Esquistos bituminosos. Las lutitas petrolíferas son abundantes, pero la extracción del petróleo que contienen es a la vez complicada y costosa. En el pasado, estas rocas eran soca-vadas y cargadas en instalaciones de superficie para generar hidrocarburos líquidos. Ahora, las compañías están probando métodos para calentar la roca en sitio y producir el petróleo en forma convencional. La tecnología de campos petroleros puede desempeñar un rol clave en la evaluación de la riqueza potencial y el rendimiento de los depósitos de lutitas petrolíferas.
Operaciones en el Ártico. Si bien constituye sólo un 6% de la superficie terrestre, el Ártico aloja aproximada-mente un 30% de las reservas no descubiertas de gas y un 13% de las reservas no descubiertas de petróleo de todo el mundo. Las actividades de exploración y producción en el Ártico implican numerosos desafíos, entre los que se encuentran un clima rigu-roso, una estación operacional corta, condiciones complejas de superficie y subsuelo somero, y un ambiente frágil. Este artículo examina los primeros descubrimientos de hidro-carburos y analiza la utilización de las tecnologías existentes e innova-doras, necesarias para encarar los problemas singulares de las opera-ciones de exploración, desarrollo y producción en esta región remota.
Recuperación mejorada de petróleo. Para ayudar a satisfacer las demandas energéticas actuales y futuras, la industria de E&P debe recuperar de los pozos existentes todo el petróleo que resulte econó-micamente factible. Después del proceso de inyección de agua, el volumen sustancial del recurso remanente constituye el objetivo de las técnicas de recuperación mejorada de petróleo (EOR), que incluyen los métodos de inyección de fluidos calientes, gas miscible y químicos. Este artículo analiza los fundamentos de las técnicas EOR e incluye algunos casos de estudio recientes de Medio Oriente y EUA.
La naturaleza de la tecnología: Qué es y cómo evoluciona W. Brian ArthurFree Press, división de Simon & Schuster, Inc.1230 Avenue of the AmericasNueva York, Nueva York 10020 EUA2009. 256 páginas. USD 27.00ISBN 978-1-4165-4405-0
De qué modo funciona la tecnología, cómo evoluciona y de qué forma incita a que se produzca el cambio económico son algunas de las preguntas exploradas en este libro que hace reflexionar. Mediante abundantes ejemplos, que se extienden desde las invenciones históricas hasta las actuales maravillas de la alta tecnología, el autor explica cómo surgen las nuevas tecnologías transformadoras y de qué manera funciona realmente la innovación.
Contenido:
• Las preguntas
• Combinación y estructura
• Los fenómenos
• Dominios, o mundos a los que se ingresa para visualizar qué puede lograrse en ellos
• La ingeniería y sus soluciones
• El origen de las tecnologías
• La profundización estructural
• Revoluciones y redominaciones
• Los mecanismos de la evolución
• La economía que evoluciona a medida que evolucionan sus tecnologías
• ¿En qué lugar nos hallamos con esta creación que nos es propia?
• Notas, Bibliografía, Índice
De vez en cuando, aparece un libro que cubre un tópico seminal de manera tan reveladora que debe ser leído por todos aquellos que quieran entender la sociedad y la cultura en que vivimos. La naturaleza de la tecnología es ese tipo de libro: proporciona una comprensión fundamental de qué es, de dónde proviene y cómo evoluciona la tecnología. . . Para todo aquél que lea este libro será evidente que W. Brian Arthur ha efectuado un
aporte radical para nuestro entendimiento de la tecnología.
Nelson MR: European Affairs (Abril-mayo
de 2010), http://www.europeaninstitute.org/
April-May-2010/w-brian-arthurs-qthe-nature-of-
technology-what-it-is-and-how-it-evolvesq.html
(Se accedió el 8 de junio de 2010)
Los nanomateriales: Mecánica y mecanismosK.T. RameshSpringer233 Spring StreetNueva York, Nueva York 10013 EUA2009. 316 páginas. USD 169.00ISBN 078-0-387-09782-4
Mediante la integración de gran parte de la nueva literatura sobre los nanomateriales, este libro cumple con el objetivo de brindar al lector una comprensión básica de la mecánica de los nanomateriales y explicar puntos de vista acerca de estos nuevos materiales que podrían ser útiles tanto para la investigación como para las aplicaciones prácticas.
Contenido:
• Los nanomateriales
• Fundamentos de la mecánica y de los materiales
• Mecánica y materiales nanoescalares: Técnicas experimentales
• Propiedades mecánicas: densidad y elasticidad
• La deformación plástica de los nanomateriales
• Los procesos de falla mecánica en los nanomateriales
• Los mecanismos dominantes en términos de escala en los nanomateriales
• Modelado de los nanomateriales
• Referencias. Índice
El autor aporta numerosos ejemplos a lo largo del texto, los cuales respaldan la comprensión conceptual general además de mostrar casos reales. . . . Muy recomendado.
Guesche G: Choice 287, Nº 3
(Noviembre de 2009): 535
La ciencia y las decisiones: Presentación de la evaluación de riesgosNational Research Council (Consejo Nacional de Investigación)The National Academies Press500 Fifth Street NWWashington, DC 20055 EUA2009. 424 páginas. USD 54.95ISBN 0-309-12046-2
Como actualización del libro de las Academias Nacionales publicado en 1983, Evaluación de Riesgos en el Gobierno Federal (también conocido como el Libro Rojo), esta nueva edición proporciona recomendaciones prácticas, científicas y técnicas, para encarar los desafíos que se presentan en materia de evaluación de riesgos con respecto a la protección de la salud pública y del medio ambiente.
Contenido:
• Introducción
• Evolución y utilización de la evaluación de riesgos en la Agencia de Protección Ambiental: Práctica actual y perspectivas futuras
• El diseño de la evaluación de riesgos
• Incertidumbre y variabilidad: Los elementos recurrentes y recalcitrantes de la evaluación de riesgos
• Hacia un enfoque unificado para la evaluación de la relación dosis-respuesta
• Selección y uso de valores predeterminados
• Implementación de la evaluación de riesgos acumulados
• Mejoramiento de la utilidad de la evaluación de riesgos
• Hacia una toma de decisiones mejorada basada en riesgos
Este informe del NRC sugiere enfoques para superar los obstáculos que se plantean para una efectiva evaluación de riesgos, tales como las prolongadas demoras en la evaluación de problemas complejos, las grandes incertidumbres que surgen por la falta de datos, la acumulación de trabajo que implican los productos químicos que no han sido evaluados, y el desarrollo continuo de materiales nuevos que exigen estudio. . . .

El océano desaparecido: Cómo Tetis remodeló el mundoDorrik StowOxford University Press198 Madison AvenueNueva York, Nueva York 10016 EUA2010. 288 páginas. USD 29.95ISBN 978-0-19-921428-0
El autor ofrece pruebas científicas de la existencia de un océano hoy desaparecido, denominado Tetis, que existió durante casi doscientos cincuenta millones de años. Describe las fuerzas que modelaron el océano, la vida marina que éste albergaba, el modo en que la vida marina creó posteriores depósitos ricos en petróleo y el impacto de las corrientes oceánicas en el medio ambiente y el clima.
Contenido:
• Tetis, la diosa del mar
• Pangea, el supercontinente, y el nacimiento de Tetis
• La extinción, la evolución y los grandes ciclos de vida
• La fecundidad de Tetis en los mares jurásicos
• De la muerte negra al oro negro
• La mayor inundación de todos los tiempos: El surgimiento y la desaparición de los mares
• El final de una era: El debate continúa
• Retrato de la ruta marítima de Tetis
• El océano en proceso de cierre. La montaña en proceso de surgimiento
• La agonía de un océano
• Epílogo: Perspectiva sobre el futuro
Volumen 22, no. 3 61
El informe es un logro fundamental. Aborda con audacia las preguntas que muchos de sus predecesores legendarios y la mayoría de los otros trabajos sobre evaluación de riesgos no se formulan o no llegan a responder.
Brewer GD: Science 325, Nº 5944 (28 de agosto
de 2009): 1075-1076
global: síntesis y nuevos órdenes del día para el siglo veintiuno.
• Índice
Este libro constituye un excelente panorama general de los efectos presentes y potenciales que el cambio climático ejerce sobre diversos paisajes. . . . Aunque los capítulos están redactados por diversos autores, el estilo y la calidad son uniformes y de buen nivel en todo el texto. . . . Las ilustraciones son abundantes y bien realizadas. . . . Sumamente recomendado.
Sasowsky W. Choice-47, Nº 7
(Marzo de 2010):1315
• Otras lecturas sugeridas, Glosario de Términos, Índice
Su descubrimiento sorprendente es que la contracción de Tetis alcanzó un punto crucial hace 65 millones de años. Al reducirse la distancia que los separaba uno del otro, los continentes bloquearon la circulación oceánica global, lo cual hizo que la Tierra se enfriara más. Stow alega que estos cambios, y no el impacto de un asteroide, provocaron el evento que implicó la extinción del período Cretáceo Terciario. Este libro brinda un aporte bien argumentado para uno de los grandes debates científicos de los últimos 30 años.
Beard, J. New Scientist (3 de junio de 2010),
http://www.newscientist.com/blogs/culturelab/
2010/06/a-sea-change-in-earths-pehistory.html.
(Se accedió el 23 de septiembre de 2010)
Al perseguir su quimérico mar, Stow navegó cada océano (salvo, por supuesto, el que sigue siendo su favorito), y vuelve a contar su historia mediante un viaje de descubrimiento autobiográfico personal. En ese carácter, este libro es un himno de alegría para la vida de un geólogo activo que viaja por el globo. . . El océano desaparecido es un patrimonio de conocimiento nutritivo, revelado a través de la historia del Reino de Tetis . . ., [y] un libro de lectura general, ideal para los estudiantes y para aquellos muy leídos en las ciencias naturales.
Nield, T. Geoscientist 20, Nº 8 (Agosto de 2010): 8,
http://www.geolsoc.org.uk/gst/geoscientist/page
8407.html (Se accedió el 20 de septiembre de 2010).
procesos volcánicos, y proporciona fundamentos físicos y matemáticos para los modelos. Segall subraya los métodos analíticos de la mecánica del continuum. También se incluyen cálculos modelos y comparaciones entre predicciones de modelos y datos de campo provenientes de las actividades sísmicas y volcánicas de todo el mundo.
Contenido:
• Las leyes de la deformación, el esfuerzo y la conservación
• Modelos de dislocación de las fallas de desplazamiento de rumbo
• Fallas de desplazamiento de echado y dislocaciones en tres dimensiones
• Modelos de fisura de fallas
• La heterogeneidad elástica
• La relajación postsísmica
• La deformación volcánica
• La topografía y la curvatura de la tierra
• Los efectos gravitacionales
• Los efectos poroelásticos
• La fricción de las fallas
• La deformación intersísmica y los modelos de ciclos de límites de placas
• Apéndice A: Transformadas integrales
• Apéndice B: Solución de la ecuación de difusión
• Apéndice C: Desplazamientos debidos al modelo de fisura de la falla de desplazamiento de rumbo por integración de curvas de contorno
• Índice
El libro es el primero en concentrarse en los modelos utilizados para relacionar las fallas del subsuelo y el movimiento del magma con la deformación superficial. . . . Es un libro oportuno y bien redactado que presenta las herramientas matemáticas necesarias para interpretar el efecto de los nuevos datos sobre la deformación de la superficie. Para encontrar el mismo material cubierto en este libro de texto, un científico tendría que investigar centenares de trabajos y libros científicos y aunque lo hiciere no vería que los tópicos estuvieran presentados con tanta claridad o acompañados de los nuevos adelantos producidos en este tema.
Pritchard M.: “Deformation Explained,” Nature
Geoscience 3, Nº 8 (Agosto de 2010): 515
Segall . . . proporciona el primer trabajo sobre el tema que destaca, desde una base matemática exhaus-tiva, nuevas ideas sobre la teoría básica de los modelos mecánicos y aplicaciones de los sistemas GPS e InSAR para mejorar la comprensión de los procesos de deformación de la Tierra. . . . Muy recomendado.
Grose TLT: Choice 48, Nº 1
(Septiembre de 2010): 126
La geomorfología y el cambio ambiental globalOlav Slaymaker, Thomas Spencer y Christine Embleton-Hamann (eds)Cambridge University Press32 Avenue of the AmericasNueva York, Nueva York 10013 EUA2009. 450 páginas. USD 83.00ISBN 978-0-521-87812-8
Redactados por 27 geocientíficos líderes de muchos países, los 15 capítulos de este libro proveen una declaración que constituye un punto de referencia sobre el estado actual del medio ambiente y los cambios potenciales que se presentan para éste. Además, se centra en los catalizadores del cambio de paisaje, además del clima, e incluye el hidroclima, las variaciones del nivel del mar y la actividad humana.
Contenido:
• El paisaje y los procesos a escala de paisaje como el nicho no cubierto en el debate acerca del cambio ambiental: Una introducción
• Las montañas
• Los lagos y las áreas de captación de lagos
• Los ríos
• Los estuarios. Los pantanos costeros, las llanuras de marea y las dunas costeras
• Las playas, los acantilados y los deltas
• Los arrecifes de coral
• Las selvas tropicales
• Las sabanas tropicales
• Los desiertos
• Los paisajes mediterráneos
• Los bosques y tierras de pastoreo templados
• La tundra y la taiga dominada por la presencia de permafrost
• Mantos de hielo y casquetes glaciares
• El paisaje, los procesos a escala de paisaje, y el cambio ambiental
Terremotos y deformación volcánicaPaul SegallPrinceton University Press41 William StreetPrinceton, Nueva Jersey 08540 EUA2010. 458 páginas. USD 90.00ISBN 978-0-691-11302-7
Este libro de texto se centra en la medición de la deformación de la corteza terrestre para interpretar los datos obtenidos con los receptores del sistema de posicionamiento global (GPS), el radar interferométrico (InSAR) y los medidores de esfuerzo e inclinómetros de pozos. El autor utiliza modelos mecánicos de terremotos y

Oilfield Review62
Elementos esenciales del paleomagnetismoLisa Tauxe, con aportes de Robert F. Butler, Rob Van der Vooy Subir K. Banerjee University of California Press2120 Berkeley WayBerkeley, California 94704 EUA2010. 512 páginas. USD 49.95 ISBN 978-0-52026031-3
El libro de texto —basado en las notas de curso de Tauxe provenientes del Instituto Oceanográfico de Scripps en San Diego, California, donde esta autora es profesora de geofísica— se centra en la extracción y la utilización de datos de rocas y paleomagnéticos en aplicaciones arqueológicas, geológicas y geofísicas. El libro describe tanto la teoría como la práctica del paleomagnetismo.
Contenido:
• La física del magnetismo
• El campo geomagnético
• Magnetismo inducido y remanente
• Anisotropía y dominios magnéticos
• La histéresis magnética
• La mineralogía magnética
• Cómo las rocas se magnetizan y permanecen magnetizadas
• El magnetismo aplicado de las rocas (ambiental)
• Obtención de una dirección paleomagnética
• La paleointensidad
• Las estadísticas de Fisher
• Más allá de las estadísticas de Fisher
• Los tensores paleomagnéticos
• El campo geomagnético antiguo
• La GPTS y la magnetoestratigrafía
• Aplicaciones tectónicas del paleomagnetismo
• Apéndices, Bibliografía
Recomendar la compra de un libro cuyo contenido se puede encontrar en Internet sin cargo podría parecer inusual, pero este libro excepcional e importante merece que se lo recomiende. El contenido ha sido testeado en forma exhaustiva por diversos usuarios, y varios expertos también han realizado sus aportes para el trabajo. En general, el libro
es excelente como referencia, pero su buena organización y su redacción clara también hacen que sea útil como manual de instrucción, com-pleto con ejercicios. . . . Esencial.
Sasowsky, ID: Choice 47, Nº 12
(Agosto de 2010): 2358
[Susan Casey] examina las olas grandes desde todos los ángulos, y profundiza con aquellos que conocen el fenómeno muy de cerca. . . . Casey alega de modo convincente y entretenido (con hábiles trepadores de precipicios y todo lo demás) que existe un monstruo, poco conocido hasta ahora en nuestro medio . . . Insta a los científicos a que se formulen la gran pregunta. . . . Casey tiene dominio fluido de los aspectos intrincados, conoce la especialidad y escribe con lucidez, para que el resto de nosotros pueda sumarse al paseo. Su narrativa maravillosamente vívida y cinética ofrece una visión clarivi-dente de los peligros del agua; y a veces triunfos agridulces … Entre las imágenes de demolición, Casey se aferra a la magia y la belleza de las olas.
Morris, H: “Surf’s Up”: The New York Times
Sunday Book Review (17 de septiembre de 2010),
http://www.nytimes.com/2010/19/books/review/
Morris-t.html?_r=1&scp=1&sq=The Wave: In the
Pursuit of the Rogues (Se accedió el 25 de octubre
de 2010).
Contenido:
• La curiosidad mata el prejuicio … Marcos de referencia; codificación y decodificación; La curiosidad y el placer de descubrir cosas; Según fuentes confiables; El cruce de fronteras; La persistencia del prejuicio; Revelación de la madre tierra; El trueno, el relámpago y los agujeros negros; Desde la evolución hasta el HIV; La lucha contra el miedo.
• La doble hélice de la ciencia y la tecnología: Cuestiones básicas; Oferta y demanda; La ciencia empírica; La máquina del conocimiento; Qué no puede hacer la ciencia.
• Momentos de decisión; El uróboros de la ciencia; La empresa científica; Las estructuras; Hacia fuera: El macrocosmos; Hacia adentro: El microcosmos; Las escalas; Las cuatro fuerzas fundamentales; El círculo de las ciencias; Las tecnologías; La evolución cósmica; Una naturaleza, Una ciencia; Preguntas esenciales; La búsqueda del origen; El desafío de la complejidad.
• La búsqueda de la verdad: Los hechos hablan por sí mismos; El Discurso del Método; Un intermezzo restringido; ¿Se deja a Popper de lado?; Una sociología de la ciencia; ¿Pasa la ciencia a ser Google†?; La ciencia y el corazón de la cultura.
Este atractivo librito es muchas cosas a la vez: un texto para la mesita del café, una carta de amor para la ciencia y un bastión contra el analfabetismo científico .... La pasión de Bais por la ciencia y su respeto por sus métodos son contagiosos, incluso cuando sus meditaciones a veces parecen aleatorias y mezcladas cuando pasea desde la negación del HIV hasta la teoría de cuerdas, del postmodernismo a las peta-máquinas.
Gefter, A. New Scientist 205, Nº 2749
(Febrero de 2010): 48
† Google es una marca de Google, Inc.
La ola: En búsqueda de los ogros, monstruos y gigantes del océanoSusan CaseyDoubleday, división de Random House, Inc.1745 BroadwayNueva York, Nueva York 10019 EUA2010. 352 páginas. USD 27.95ISBN 978-0-7679-2884-7
Susan Casey explora la convergencia de la ciencia y la belleza de las olas gigantes; las que los surfistas extremos están dispuestos a montar, que tumban los barcos enormes y desafían a las plataformas de petróleo. Su derrotero oceánico incluye un panorama de las metas de los científicos que consisten en revelar la física de estas olas colosales, los cambios climáticos que están provocando esas olas y el caos que operan estas olas monstruosas.
Contenido:
• Introducción
• La gran empresa
• Cascos destruidos
• La onda de Schrodinger
• El karma, los tiburones tigre y la zanahoria de oro
• El adiós de las olas
• Los aventureros
• “Jamás percibí algo así”
• Asesinos
• Tiempo meteorológico duro
• Egipto
• Cortes Bank, una cordillera de montañas bajo el agua
• La costa salvaje
• Al borde del horizonte
• Epílogo
• Bibliografía seleccionada
En elogio de la ciencia: Curiosidad, comprensión y avanceSander BaisThe MIT Press55 Hayward StreetCambridge, Massachusetts 02142 EUA2010. 192 páginas. USD 24.95ISBN 0-262-01435-1
El físico teórico Bais alega que los momentos decisivos de la historia de la ciencia han sido acompañados de hitos similares en el cambio social, que afectan nuestra visión de la naturaleza, nuestra percepción de la condición humana y nuestra comprensión del universo y nuestro lugar en él. Describe aquello que él denomina el “círculo de la ciencia” —el microcosmos y el macrocosmos como imágenes especula-res— y demuestra la unidad en una secuencia de temas que incluyen la jerarquía de las estructuras, las fuerzas de la naturaleza, la evolución cosmológica y el desafío de la complejidad. También se analizan los obstáculos que encuentra la ciencia en un mundo dominado por intereses políticos y económicos de corto plazo.