
PROPUESTA DEL USO DE MESA VIBRADORA COMO …
17
DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C. PROPUESTA DEL USO DE MESA VIBRADORA COMO COMPLEMENTO DIDÁCTICO EN LA MATERIA DE ANÁLISIS SÍSMICO DE EDIFICIOS Ana Elena Zamora Luna (1) , Emilio Ramos Ruiz (2) , Mauricio Zamora López (3) , Sebastián Serrano Issa (4) , Sebastián Serrano Vega (5) 1 Serrano Ingenieros de Puebla,Asistente de Investigación y Proyectos, Puebla, 72580, sipsa.luna@gmail.com 2 Serrano Ingenieros de Puebla, Investigación y Proyectos, Puebla, 72580, [email protected] 3 Serrano Ingenieros de Puebla,Ingeniería de Proyectos, Puebla, 72580, [email protected] 4 Serrano Ingenieros de Puebla, Director de Operaciones, Puebla, 72580, sipsa.issa@gmail.com 5 Serrano Ingenieros de Puebla, Director General, Puebla, 72580, [email protected] RESUMEN Se propone introducir un equipo para facilitar la comprensión de los conceptos básicos de dinámica estructural e ingeniería sísmica en el curso de análisis sísmico de edificios. El equipo consiste en una mesa vibradora de un grado de libertad, fabricada por estudiantes de nivel licenciatura, que será la base para realizar la demostración física de cada concepto. Esta propuesta es enunciativa y no limitativa, ya que depende de la instrumentación con la que se disponga para la obtención de resultados, así como la complejidad de los ejemplos. ABSTRACT The purpose of this article is to introduce a new tool to clearly explain the principles of st1ructural dynamics and seismic engineering. The equipment consists of a shaking table with a single degree of freedom, built by college students, the table will be the foundation to make a physical demonstration of each concept. This is an expository proposal and not a limited one, given that it depends on available instrumentation to obtain the results and on the complexity of the examples analyzed. INTRODUCCIÓN El estudio del comportamiento de los edificios ante cargas dinámicas como el caso de los sismos, es importante debido a que el país se encuentra sujeto a la interacción de 5 placas tectónicas por lo que los sismos serán frecuentes y sus magnitudes considerables. Por ello, es importante que los ingenieros civiles reciban durante su formación, por lo menos, conocimientos básicos de dinámica estructural e ingeniería sísmica. Actualmente la Benemérita Universidad Autónoma de Puebla, es una de las universidades del país que cuentan con una materia que imparte los conocimientos ya mencionados dentro de su plan de estudios. Esta materia lleva el nombre de “Análisis Sísmico de Edificios” y su temario, presentado a continuación, se basa en los apuntes realizados por el Dr. Javier Avilés López durante su época como catedrático en esta universidad. 1. Características de los sismos 1.1. Causas de los sismos 1.2. Sismos de origen tectónico 1.3. Ondas sísmicas 1.4. Acelerogramas
Transcript of PROPUESTA DEL USO DE MESA VIBRADORA COMO …

DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
PROPUESTA DEL USO DE MESA VIBRADORA COMO COMPLEMENTO
DIDÁCTICO EN LA MATERIA DE ANÁLISIS SÍSMICO DE EDIFICIOS
Ana Elena Zamora Luna (1), Emilio Ramos Ruiz (2), Mauricio Zamora López (3), Sebastián Serrano Issa (4), Sebastián Serrano Vega (5)
1Serrano Ingenieros de Puebla,Asistente de Investigación y Proyectos, Puebla, 72580, [email protected] 2 Serrano Ingenieros de Puebla, Investigación y Proyectos, Puebla, 72580, [email protected] 3Serrano Ingenieros de Puebla,Ingeniería de Proyectos, Puebla, 72580, [email protected]
4Serrano Ingenieros de Puebla, Director de Operaciones, Puebla, 72580, [email protected] 5Serrano Ingenieros de Puebla, Director General, Puebla, 72580, [email protected]
RESUMEN
Se propone introducir un equipo para facilitar la comprensión de los conceptos básicos de dinámica estructural e
ingeniería sísmica en el curso de análisis sísmico de edificios. El equipo consiste en una mesa vibradora de un grado
de libertad, fabricada por estudiantes de nivel licenciatura, que será la base para realizar la demostración física de cada
concepto. Esta propuesta es enunciativa y no limitativa, ya que depende de la instrumentación con la que se disponga
para la obtención de resultados, así como la complejidad de los ejemplos.
ABSTRACT
The purpose of this article is to introduce a new tool to clearly explain the principles of st1ructural dynamics and
seismic engineering. The equipment consists of a shaking table with a single degree of freedom, built by college
students, the table will be the foundation to make a physical demonstration of each concept. This is an expository
proposal and not a limited one, given that it depends on available instrumentation to obtain the results and on the
complexity of the examples analyzed.
INTRODUCCIÓN
El estudio del comportamiento de los edificios ante cargas dinámicas como el caso de los sismos, es importante debido
a que el país se encuentra sujeto a la interacción de 5 placas tectónicas por lo que los sismos serán frecuentes y sus
magnitudes considerables.
Por ello, es importante que los ingenieros civiles reciban durante su formación, por lo menos, conocimientos básicos
de dinámica estructural e ingeniería sísmica. Actualmente la Benemérita Universidad Autónoma de Puebla, es una de
las universidades del país que cuentan con una materia que imparte los conocimientos ya mencionados dentro de su
plan de estudios. Esta materia lleva el nombre de “Análisis Sísmico de Edificios” y su temario, presentado a
continuación, se basa en los apuntes realizados por el Dr. Javier Avilés López durante su época como catedrático en
esta universidad.
1. Características de los sismos
1.1. Causas de los sismos
1.2. Sismos de origen tectónico
1.3. Ondas sísmicas
1.4. Acelerogramas
XX Mexican Congress of Earthquake Engineering Acapulco, 2015
1.5. Magnitud e Intensidad
2. Dinámica de Sistemas con un grado de libertad
2.1. Introducción
2.2. Sistemas no amortiguados
2.2.1. Vibraciones libres
2.2.2. Vibraciones Forzadas
2.3. Sistemas amortiguados
2.3.1. Vibraciones Libres
2.3.2. Vibraciones Forzadas
2.3.3. Movimiento del terreno
2.4. Espectros de respuesta
2.5. Espectros de diseño
3. Dinámica de sistemas con N grados de libertad
3.1. Introducción
3.2. Vibraciones libres no amortiguadas
3.3. Cálculo de modos naturales
3.3.1. Matrices de rigidez y flexibilidad
3.3.2. Método de Holzer
3.3.3. Método de Stodola-Vianello
3.3.4. Método de Jacobi
3.4. Vibraciones forzadas no amortiguadas
3.4.1. Análisis modal
3.5. Movimiento del terreno
3.5.1. Análisis modal espectral
4. Análisis sísmico de edificios
4.1. Introducción
4.2. Edificios sin torsión
4.2.1. Análisis sísmico estático
4.2.2. Análisis sísmico dinámico
4.3. Edificios con torsión
4.3.1. Rigidez de entrepiso
4.3.2. Análisis sísmico estático
4.3.3. Análisis sísmico dinámico
En este artículo nos enfocaremos únicamente a los temas en los que se puede hacer uso de la mesa vibradora para
ejemplificar los conceptos, por lo tanto se iniciará desde la segunda unidad del programa, “Dinámica de sistemas con
un grado de libertad”, después de explicar la definición de grado de libertad y las hipótesis que simplifican la cantidad
de grados de libertad, puesto que este programa está enfocado a sistemas cercanamente acoplados.
SISTEMAS NO AMORTIGUADOS
Vibración libre no amortiguada
Una estructura se encuentra en vibración libre cuando es perturbada de su estado de equilibrio estático y dejada a vibrar
sin que exista una excitación dinámica externa. La vibración libre se inicia aplicando a la masa un desplazamiento,
una velocidad o aceleración inicial, es decir, estará vibrando únicamente a partir de condiciones iniciales.
En la figura 1 se muestra de manera gráfica el modelo de un marco que representa un sistema de un grado de libertad,
en vibración libre sin amortiguamiento; el modelo se encuentra oscilando bajo condiciones iniciales. La figura 2
representa el gráfico de la respuesta de este modelo:
DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
Figura 1.Modelo de vibración libre no amortiguada.
Figura 2. Respuesta de vibración libre no amortiguada
En vibración libre, la estructura vibra debido a las condiciones iniciales y no por una fuerza aplicada a la estructura,
por lo tanto, la ecuación de movimiento queda de la siguiente manera:
𝐹𝑖 + 𝐹𝑟 = 0 (1)
𝐹𝑟 = 𝑘 ∗ 𝑈(𝑡), es la fuerza recuperadora
k, es la rigidez
U(t), es el desplazamiento
𝐹𝑖 = 𝑚 ∗ Ü(𝑡), es la fuerza de inercia
m, es la masa
Ü(t), es la aceleración
Es decir:
𝑚 ∗ Ü(𝑡) + 𝑘 ∗ 𝑈(𝑡) = 0 (2)
La rigidez y la masa se obtendrán de las propiedades geométricas del sistema, el desplazamiento y la aceleración serán
nuestras condiciones iniciales.
Vibraciones forzadas no amortiguadas
En este caso la estructura no vibra debido a condiciones iniciales, sino que se cuenta con una fuerza dinámica aplicada
al sistema, o bien un desplazamiento o aceleración en la base. Las figuras 3 y 4, respectivamente, muestran su
representación gráfica y su respuesta:
m F(t)=0
U
t
XX Mexican Congress of Earthquake Engineering Acapulco, 2015
Figura 3. Modelo de vibración forzada no amortiguada.
Figura 4.Respuesta de vibración forzada no amortiguada
La ecuación de movimiento, al existir una fuerza dinámica aplicada a la estructura, queda de la siguiente manera:
𝐹𝑖 + 𝐹𝑟 = 𝐹(𝑡) (3)
F(t), es la fuerza dinámica aplicada
Sustituyendo términos, queda:
𝑚 ∗ Ü(𝑡) + 𝑘 ∗ 𝑈(𝑡) = 𝐹(𝑡) (4)
SISTEMAS AMORTIGUADOS
El amortiguamiento es la capacidad que poseen los sistemas para disipar la energía y de esta manera volver de manera
paulatina a su posición original. En los casos anteriores se puede observar como las curvas mantienen su oscilación a
lo largo del tiempo, lo cual es un caso únicamente teórico. Existen diversos tipos de sistemas amortiguados:
Sistemas subamortiguados
Sistemas críticamente amortiguados
Sistemas sobreamortiguados
El amortiguamiento crítico de un sistema Ccr, estará determinado por la siguiente ecuación:
𝐶𝑐𝑟 = 2𝑚 ∗ 𝜔 (5)
El amortiguamiento estará expresado con la literal c, por lo cual la fracción de amortiguamiento , será igual a la
relación del amortiguamiento del sistema entre el amortiguamiento crítico:
𝜁 = 𝑐/𝐶𝑐𝑟 (6)
Por lo tanto, los diferentes sistemas toman los siguientes valores:
m F(t)
U
t

DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
Sistemas subamortiguados.
El amortiguamiento del sistema será menor que el amortiguamiento crítico, es decir que la fracción de
amortiguamiento será menor a la unidad:
c<Ccr, <1
Figura 5. Respuesta de sistemas no amortiguados.
Sistemas críticamente amortiguados
El amortiguamiento del sistema es igual al amortiguamiento crítico, por lo que la fracción de amortiguamiento
será la unidad.
c=Ccr, =1
Figura 6. Respuesta de sistemas no amortiguados.
Sistemas sobreamortiguados
Su amortiguamiento es superior al amortiguamiento crítico, es decir, una fracción de amortiguamiento
superior a la unidad.
c>Ccr, >1
Figura 7. Respuesta de sistemas no amortiguados.
Para la ingeniería sísmica los sistemas de interés son los sistemas subamortiguados, pues el amortiguamiento con que
cuentan las estructuras se modela de este tipo. Y éste es debido a la fricción interna de los materiales, agrietamientos
y mecanismos de disipación de energía propios de los materiales.
Vibración libre amortiguada
U
t
U
t
U
t

XX Mexican Congress of Earthquake Engineering Acapulco, 2015
Un marco sometido a vibración libre con amortiguamiento, se representará de la siguiente manera, con su respectivo
amortiguamiento intrínseco.
Figura8. Modelo de vibración libre amortiguada.
La respuesta de la estructura en vibración libre amortiguada, se muestra en la siguiente gráfica, donde se puede observar
que inicia con un desplazamiento generando oscilaciones que van disminuyendo de manera exponencial con el tiempo
hasta llegar al reposo.
Figura9. Respuesta de vibración libre amortiguada.
En este caso, al ser vibración libre, la estructura oscilará debido a las condiciones iniciales y al considerar el
amortiguamiento, el equilibro dinámico queda expresado de la siguiente manera:
𝑚 ∗ Ü(𝑡) + 𝑐 ∗ �̇�(𝑡) + 𝑘 ∗ 𝑈(𝑡) = 0 (7)
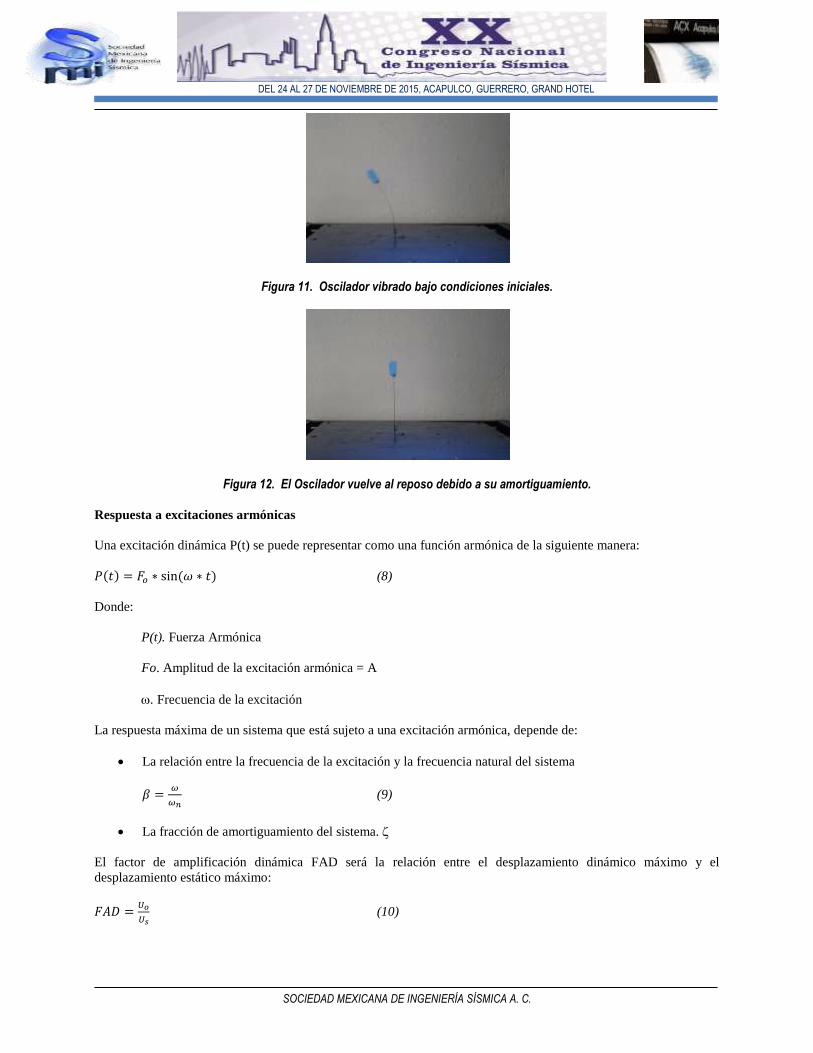
Este caso se ejemplificará con ayuda de un oscilador de un grado de libertad, fabricando la columna con una lámina
delgada de acero y la masa con un ortoedro de madera. Para poner a vibrar al oscilador, se le aplicará un desplazamiento
U(t) inicial para generar oscilaciones y observar que con el paso del tiempo su respuesta decrecerá exponencialmente,
hasta llegar al reposo.
Figura 10. Oscilador con desplazamiento inicial.
m
k1 k2c
F(t)=0
U
t
U(t)
DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
Figura 11. Oscilador vibrado bajo condiciones iniciales.
Figura 12. El Oscilador vuelve al reposo debido a su amortiguamiento.
Respuesta a excitaciones armónicas
Una excitación dinámica P(t) se puede representar como una función armónica de la siguiente manera:
𝑃(𝑡) = 𝐹𝑜 ∗ sin(𝜔 ∗ 𝑡) (8)
Donde:
P(t). Fuerza Armónica
Fo. Amplitud de la excitación armónica = A
. Frecuencia de la excitación
La respuesta máxima de un sistema que está sujeto a una excitación armónica, depende de:
La relación entre la frecuencia de la excitación y la frecuencia natural del sistema
𝛽 =𝜔
𝜔𝑛 (9)
La fracción de amortiguamiento del sistema.
El factor de amplificación dinámica FAD será la relación entre el desplazamiento dinámico máximo y el
desplazamiento estático máximo:
𝐹𝐴𝐷 =𝑈𝑜
𝑈𝑠 (10)

XX Mexican Congress of Earthquake Engineering Acapulco, 2015
Cuando la frecuencia de la excitación coincide con la frecuencia natural del sistema, se presenta la amplificación
dinámica máxima y este fenómeno se conoce como resonancia. En estas condiciones, la amplificación dinámica
máxima es:
𝐹𝐴𝐷 =1
2𝜁 (11)
Figura 13. Gráfico de Factor de amplificación dinámica – Relación de frecuencias.
En este caso el estudiante podrá observar el fenómeno de resonancia con ayuda del oscilador y la mesa vibradora.
Calculando previamente la frecuencia natural del oscilador y aplicándole al oscilador esa frecuencia por medio de la
mesa vibradora, como se verá en el título de “Frecuencias y periodos naturales”.
Vibración forzada amortiguada
Finalmente, este es el sistema que nos interesa. Considerando que las estructuras se ven sometidas a una excitación
dinámica en su base ante el arribo de las ondas sísmicas y cuentan con un amortiguamiento que se modela como se
mencionó anteriormente. En este caso, el modelo y la excitación se representan como sigue:
Figura 14. Modelo de vibración forzada amortiguada
Figura 15. Respuesta de vibración forzada amortiguada
m
k1 k2c
Üg(t)
U
t
DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
Como se observa en la figura 14 la estructura inicia su vibración desde el reposo, comenzando a vibrar a causa de la
excitación dinámica en su base, con oscilaciones que disminuyen exponencialmente hasta llegar al reposo gracias al
amortiguamiento. La ecuación de movimiento del sistema es la siguiente:
𝑚 ∗ Ü(𝑡) + 𝑐 ∗ �̇�(𝑡) + 𝑘 ∗ 𝑈(𝑡) = −𝑚 ∗ Ü𝑔 (𝑡) (12)
Donde:
Ü𝑔 (𝑡), es la aceleración del terreno
En la siguiente imagen se observa el oscilador desde su reposo y en la siguiente, vibrando con ayuda de la mesa:
Figura 16. Oscilador iniciando su vibración desde el reposo.
Figura 17. Oscilador vibrando en vibración forzada con amortiguamiento.
FRECUENCIA Y PERIODO NATURALES
La frecuencia natural de un sistema, depende únicamente de las propiedades físicas y geométricas de la estructura y se
calcula mediante las siguientes ecuaciones, cuyas unidades son radianes sobre segundo.
𝜔 = √(𝑘 ⁄ 𝑚) (13)
𝜔 = 2𝜋/𝑇 (14)
Donde T es el periodo natural de vibración, es decir el tiempo que tarda el sistema en efectuar un ciclo. Despejando
este dato, tenemos:
𝑇 = 2𝜋/𝜔 (15)

XX Mexican Congress of Earthquake Engineering Acapulco, 2015
El valor inverso del periodo natural de vibración es la frecuencia cíclica:
𝑓 = 1/𝑇 (16)
La frecuencia cíclica consiste en el número de ciclos que efectúa un sistema en una unidad de tiempo, obteniendo como
unidades ciclos/segundo o hertz.
Figura 18. Posiciones del oscilador al efectuar un ciclo
Figura 19. Gráfico de un ciclo.
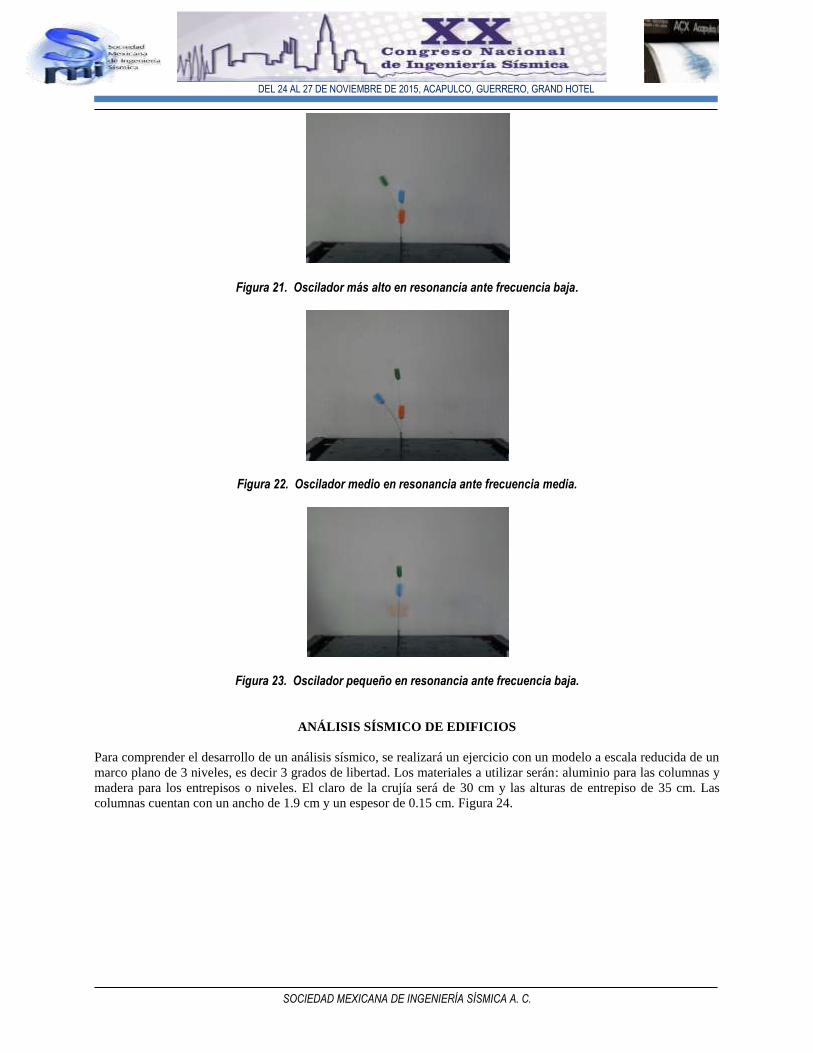
Para representar físicamente este concepto, se utilizarán 3 osciladores de distintas alturas, empotrados a la mesa
vibradora. Se activará la mesa a una determinada frecuencia, de esta manera el alumno podrá observar en un tiempo
determinado, cuántas veces pasa cada oscilador por el mismo sitio completando ciclos. El alumno podrá observar
también la diferencia de comportamiento entre los osciladores sometidos a la misma excitación, como se muestra en
las figuras 21, 22 y 23.
Figura 20. Osciladores en reposo.
m
U
t
T
DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
Figura 21. Oscilador más alto en resonancia ante frecuencia baja.
Figura 22. Oscilador medio en resonancia ante frecuencia media.
Figura 23. Oscilador pequeño en resonancia ante frecuencia baja.
ANÁLISIS SÍSMICO DE EDIFICIOS
Para comprender el desarrollo de un análisis sísmico, se realizará un ejercicio con un modelo a escala reducida de un
marco plano de 3 niveles, es decir 3 grados de libertad. Los materiales a utilizar serán: aluminio para las columnas y
madera para los entrepisos o niveles. El claro de la crujía será de 30 cm y las alturas de entrepiso de 35 cm. Las
columnas cuentan con un ancho de 1.9 cm y un espesor de 0.15 cm. Figura 24.

XX Mexican Congress of Earthquake Engineering Acapulco, 2015
Figura 24. Modelo de un marco plano de tres niveles empotrado a la mesa vibradora.
El primer paso será obtener los pesos de cada nivel como se muestra en las siguientes tablas:
Tabla 1. Análisis de cargas del primer y segundo nivel.
Elemento Long. (cm) Base (cm) Altura (cm) ɣ (Kg/cm³) W (Kg)
Columnas 70 0.15 1.9 0.0027 0.054
Entrepiso 0.725
0.779
Tabla 2. Análisis de cargas del tercer nivel.
Elemento Long. (cm) Base (cm) Altura (cm) ɣ (Kg/cm³) W (Kg)
Columnas 35 0.15 1.9 0.0027 0.027
Entrepiso 0.725
0.752
Se prosigue a calcular las rigideces de entrepiso, considerando la suma de las rigideces de las dos columnas de cada
entrepiso, designándose por k1, k2 y k3 a la rigidez del entrepiso correspondiente.
Tabla 3. Cálculo de la rigidez de entrepiso.
Rigidez de una columna:
b= 0.15 cm
h= 1.9 cm
L= 35 cm
Iy= 5.34E-04 cm4
E= 700000 Kgf/cm2
K= 0.1047 Kgf/cm
Rigidez de entrepiso:
Ki= 20.939 Kgf/m
Ya que para el análisis sísmico no se requieren los pesos sino las masas, en la siguiente tabla se realiza la conversión:
Tabla 4. Masas por nivel y rigideces de entrepiso
Concepto W (Kgf) Masa (kgf*s²/m) K
(Kgf/m)

DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
1 0.7789 0.0794 20.939
2 0.7789 0.0794 20.939
3(azotea) 0.7519 0.0766 20.939
La matriz de masas se ensambla como sigue:
[𝑀] = [
𝑚1 0 00 𝑚2 00 0 𝑚3
] (17)
Por lo que la matriz de masas de nuestro ejemplo queda de la siguiente manera:
[𝑀] = [0.0794 0 0
0 0.0794 00 0 0.0766
] (17.1)
La matriz de rigideces para una estructura de tres niveles queda ensamblada como sigue:
[𝐾] = [
𝑘1 + 𝐾2 −𝑘2 0−𝑘2 𝑘2 + 𝑘3 −𝑘3
0 −𝑘3 𝑘3
] (18)
Sustituyendo con los datos del ejemplo:
[𝐾] = [41.88 −20.94 0
−20.94 41.88 −20.940 −20.94 20.94
] (18.1)
La matriz característica será la diferencia entre la matriz de rigideces menos el producto de la frecuencia natural al
cuadrado, por la matriz de masas, es decir:
|[𝐾] − 𝜔𝑛2 [𝑀]| = 0 (19)
El determinante de la ecuación 19 será el polinomio característico, el cual, para nuestro ejercicio, consta de una
ecuación de tercer grado:
−4.832 ∗ 10−04 ∗ 𝜆3 + 64.166 ∗ 10−02 ∗ 𝜆2 − 205.249 ∗ 𝜆 + 9180.531 = 0 (20)
Siendo:
𝜆 = 𝜛𝑛2 (21)
Dándonos como resultado las frecuencias modales de vibración al cuadrado:
Tabla 5. Valores característicos.
wn12= 53.23
wn22= 415.195
wn32= 859.66
Cuyas raíces son las frecuencias de vibración de cada modo:

XX Mexican Congress of Earthquake Engineering Acapulco, 2015
Tabla 6. Frecuencias modales de vibración.
wn1= 7.30 rad/s
wn2= 20.38 rad/s
wn3= 29.32 rad/s
Utilizando la ecuación 15, obtendremos los periodos de vibración de cada modo:
Tabla 7. Periodos modales de vibración.
Tn1= 0.8612 seg
Tn2= 0.3084 seg
Tn3= 0.2143 seg
Las frecuencias cíclicas, utilizando la ecuación 16, son:
Tabla 8. Frecuencias cíclicas de cada modo.
f1= 1.16 ciclos/seg
f2= 3.24 ciclos/seg
f3= 4.67 ciclos/seg
Formas modales
Las formas modales o vectores característicos, se obtendrán a partir de la matriz característica, mediante la siguiente
ecuación:
([𝐾] − 𝜔𝑛𝑖2 ∗ [𝑀]) ∗ {𝐴𝑖} = 0 (22)
Sustituyendo valores para el primer modo:
([41.88 −20.94 0
−20.94 41.88 −20.940 −20.94 20.94
] − [0.0794 0 0
0 0.0794 00 0 0.0766
] ∗ 53.23) ∗ {
𝐴11
𝐴21
𝐴31
} = {000
} (23)
Para el segundo modo:
([41.88 −20.94 0
−20.94 41.88 −20.940 −20.94 20.94
] − [0.0794 0 0
0 0.0794 00 0 0.0766
] ∗ 415.195) ∗ {
𝐴12
𝐴22
𝐴32
} = {000
} (24)
Para el tercer modo:
([41.88 −20.94 0
−20.94 41.88 −20.940 −20.94 20.94
] − [0.0794 0 0
0 0.0794 00 0 0.0766
] ∗ 859.66) ∗ {
𝐴13
𝐴23
𝐴33
} = {000
} (25)
Donde se obtendrán tres ecuaciones con tres variables para cada modo, dos de las tres ecuaciones serán equivalentes por lo cual para la obtención de éstas variables, se le asignará a A11, A12y A13un valor unitario. Los
DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
valores de estas variables serán cualitativos y no cuantitativos, pues representarán únicamente la posición de las masas de cada nivel con respecto a las otras. Obteniendo finalmente los vectores característicos:
{
𝐴11
𝐴21
𝐴31
} = {1
1.7982.233
} (26)
{
𝐴12
𝐴22
𝐴32
} = {1
0.426−0.819
} (27)
{
𝐴13
𝐴23
𝐴33
} = {1
−1.260.587
} (28)
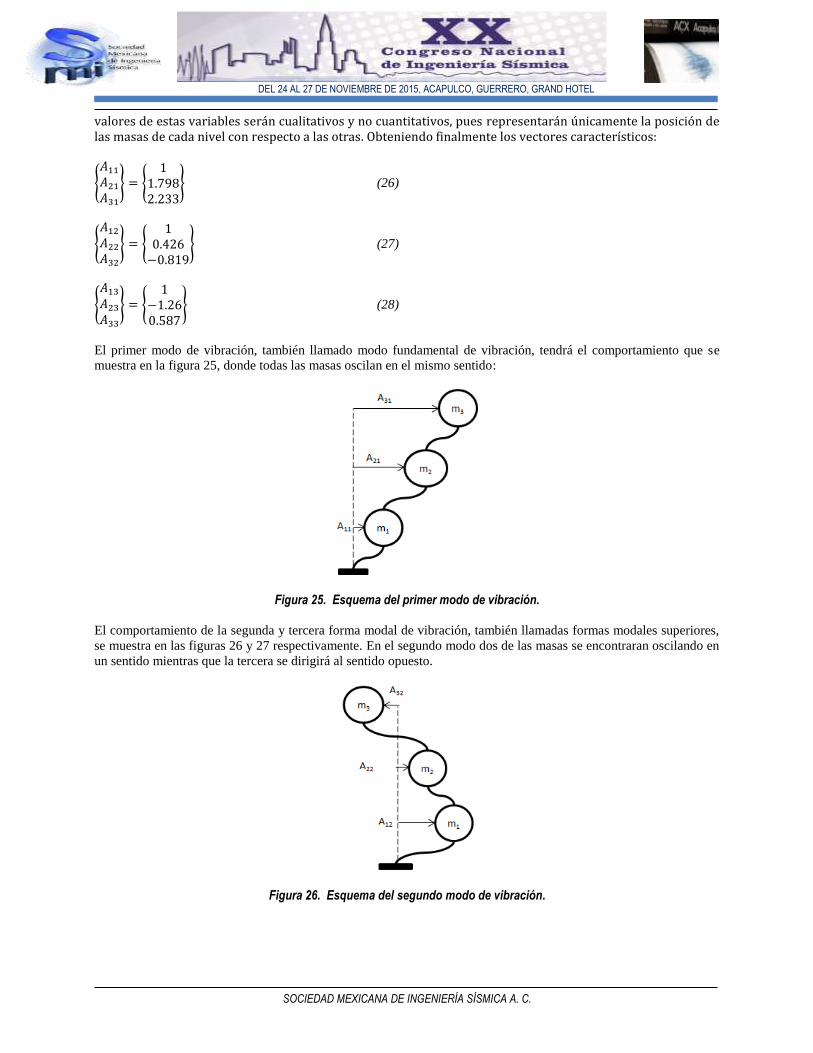
El primer modo de vibración, también llamado modo fundamental de vibración, tendrá el comportamiento que se
muestra en la figura 25, donde todas las masas oscilan en el mismo sentido:
Figura 25. Esquema del primer modo de vibración.
El comportamiento de la segunda y tercera forma modal de vibración, también llamadas formas modales superiores,
se muestra en las figuras 26 y 27 respectivamente. En el segundo modo dos de las masas se encontraran oscilando en
un sentido mientras que la tercera se dirigirá al sentido opuesto.
Figura 26. Esquema del segundo modo de vibración.
XX Mexican Congress of Earthquake Engineering Acapulco, 2015
Figura 27. Esquema del tercer modo de vibración
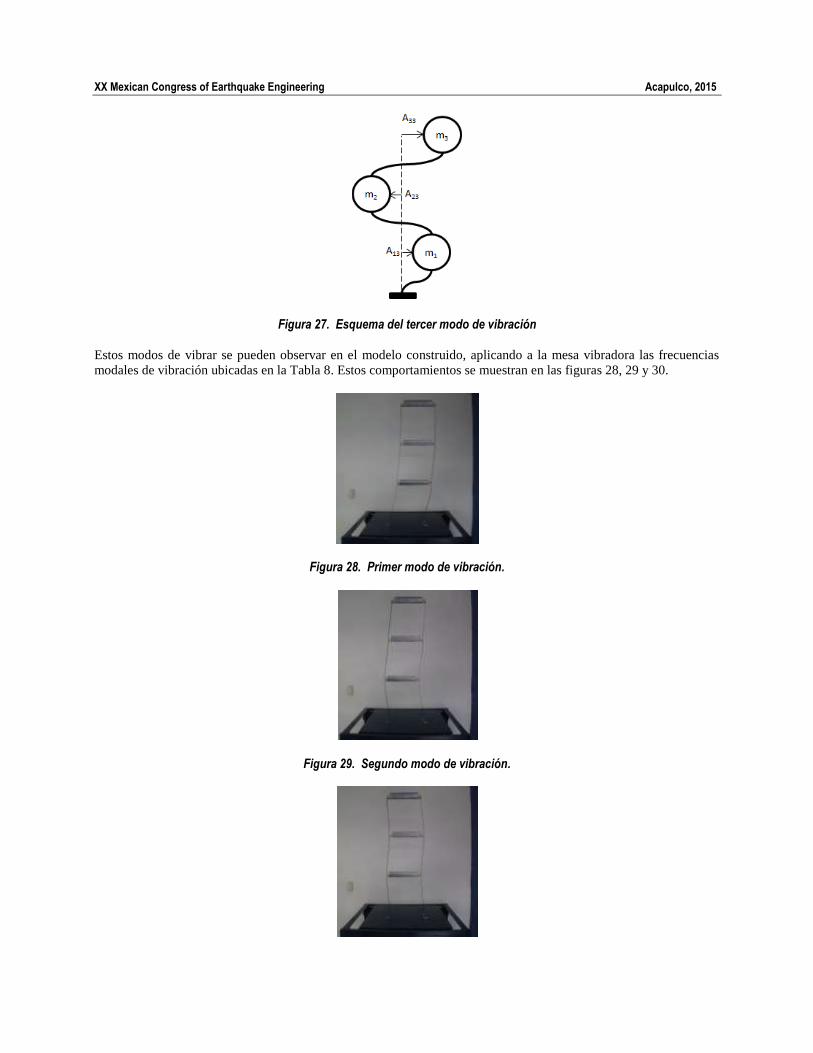
Estos modos de vibrar se pueden observar en el modelo construido, aplicando a la mesa vibradora las frecuencias
modales de vibración ubicadas en la Tabla 8. Estos comportamientos se muestran en las figuras 28, 29 y 30.
Figura 28. Primer modo de vibración.
Figura 29. Segundo modo de vibración.

DEL 24 AL 27 DE NOVIEMBRE DE 2015, ACAPULCO, GUERRERO, GRAND HOTEL
SOCIEDAD MEXICANA DE INGENIERÍA SÍSMICA A. C.
Figura 30. Tercer modo de vibración.
CONCLUSIONES
Debido a la presencia frecuente de sismos en nuestro país, es importante que las universidades incluyan en sus planes
de estudio para la licenciatura de Ingeniería Civil, una materia que incluya conocimientos básicos de dinámica
estructural e ingeniería sísmica. Estos conocimientos deberán ser adecuadamente comprendidos por los estudiantes,
por lo cual la mesa vibradora resulta de gran ayuda para el logro de este objetivo. Los alumnos podrán observar
físicamente el comportamiento que tendrán las estructuras y de esta manera comprender el proceso de un análisis
sísmico de edificios, entenderán también de manera dinámica conceptos como frecuencia, vibración y modos de vibrar.
Este artículo se llevó a cabo con una mesa vibradora construida artesanalmente, por lo que una mesa más sofisticada
resultará conveniente para un desarrollo más amplio del programa de la materia y para la elaboración de ejercicios más
complejos.
REFERENCIAS
Avilés López, J. Apuntes.
Chopra, Anil K. (2013), Dinámica de Estructuras, Ed. Addison-Wesley
Paz, Mario. (1992), Dinamica estructural: Teoría y cálculo, Ed. Reverte


















