Proyectos Terminales I y II - Departamento de...
36
Universidad Autónoma Metropolitana Ingeniería Civil UAM Proyectos Terminales I y II Alumno: Miguel Ángel Santiago Molina Asesor: Dr. Amador Terán Gilmore
Transcript of Proyectos Terminales I y II - Departamento de...

Universidad Autónoma Metropolitana
Ingeniería Civil
UAM
Proyectos
Terminales I y II
Alumno: Miguel Ángel Santiago Molina
Asesor: Dr. Amador Terán Gilmore

2
Estudio del uso de amortiguamiento adicional para reducir la
respuesta dinámica de edificaciones de gran altura ubicadas en la
Zona del Lago del D.F.

3
CONTENIDO
1.- Introducción
1.1.- Definición del Problema
1.2.- Efecto de modos superiores en edificaciones
1.3.- Efecto de amortiguamiento adicional
1.4.- Contribución de los Proyectos Terminales
2.- Sistema Estructurales bajo consideración
3.- Movimiento del terreno
4.- Dinámica de sistemas de varios grados de libertad.
5.- Respuesta estructural
6.- Anexo 1
7.- Bibliografía

4
1. - Introducción
1.1.- Definición del Problema
La historia sísmica que presenta la ciudad de México no es alentadora. En
particular, el sismo de septiembre de 1985 dejó ver con claridad los problemas que
existen cuando se utiliza el comportamiento plástico de las estructuras para
acomodar las demandas sísmicas de deformación, tanto máximas como acumuladas.
Los estudios e investigaciones en ingeniería sísmica han dado lugar a normas de
diseño que permiten mejorar el comportamiento de las estructuras ante excitaciones
sísmicas de diferente intensidad. Aunque esto ha permitido elevar el nivel de
seguridad estructural de las edificaciones que se construyen en la capital mexicana,
el problema de daño excesivo no podrá eliminarse hasta que se cambie el enfoque
que promueve la supervivencia de las estructuras antes sismos extremos a través de
su comportamiento plástico.
En los últimos años se han construido varios edificios de gran altura en la Zona del
Lago del Distrito Federal, y actualmente se encuentran muchos más en su etapa de
planeación. Esto ha dado lugar a la necesidad de estudiar formas de controlar la
respuesta dinámica de este tipo de construcciones, particularmente de aquellas que
lleguen a desplantarse en suelos blandos.
La búsqueda de un mejor comportamiento para estas estructuras frente a sismos,
particularmente en lo que se refiere a la reducción de pérdidas humanas y
materiales, lleva a la posibilidad de utilizar soluciones innovadoras, tal como el uso
de amortiguamiento adicional. Si la energía que entra a la estructura durante un
sismo es disipada por dispositivos adicionales de manera estable, es posible pensar
en la posibilidad de desempeños sísmicos que satisfagan las múltiples y complejas
necesidades que surgen a partir de la construcción de una edificación de gran altura.

5
El presente trabajo pretende establecer medidas cuantitativas que muestren la
efectividad del amortiguamiento adicional para el control de la respuesta dinámica
para edificios de gran altura ubicados en la Zona del Lago del Distrito Federal.
1.2.- Efecto de modos superiores en edificaciones
Por lo general, la respuesta dinámica de un edificio queda descrita a partir de la
respuesta de sus tres primeros modos de vibrar. Normalmente estos modos mueven
95% o más de la masa de un edificio. En particular, el primer modo, conocido como
modo fundamental de vibración, tiene asociado cerca del 80% de la masa del
edificio.
A cada uno de estos modos le corresponde un periodo de vibración. Mientras que al
modo fundamental de vibración le corresponde el mayor periodo, el resto de los
modos se ordenan de manera secuencial de tal manera que corresponda un menor
periodo conforme crece el número que denota al modo.
Los periodos de un edificio dependen de su rigidez lateral y masa reactiva. En
cuanto a la rigidez lateral, esta depende a su vez de las propiedades mecánicas y
geométricas de los elementos estructurales. En ocasiones la rigidez lateral del
edificio depende de otros factores, tal como el tipo de suelo y cimentación sobre los
que se desplanta. En presencia de comportamiento plástico que degrade las
propiedades estructurales de los elementos estructurales, la rigidez lateral del
edificio puede exhibir cambios significativos durante una excitación sísmica.
Estudios anteriores han mostrado que en ocasiones, la degradación en la rigidez
lateral de un edificio puede resultar en comportamientos estructurales inadecuados
en sus pisos superiores. En particular, la degradación de rigidez en una estructura
resulta en que las abscisas espectrales correspondientes a sus diferentes modos se
alarguen, de tal manera que sus correspondientes ordenadas espectrales se
modifiquen de manera importante. La anterior puede resultar en que la contribución

6
relativa de cada modo a la respuesta dinámica del edificio se modifique
sustancialmente. En casos en que la contribución de los modos superiores se
incremente de manera sustancial con respecto a la del modo superior, se incrementa
sustancialmente la respuesta en los pisos superiores, lo que a veces puede resultar en
niveles de daño excesivo en dichos pisos.
1.3.- Efecto de amortiguamiento adicional.
El nivel de amortiguamiento inherente a una estructura suele ser bajo, por lo que su
capacidad de disipar energía en su rango elástico de comportamiento es muy
limitada. Durante un sismo de gran intensidad, las estructuras suelen recurrir a su
rango plástico de comportamiento para complementar su capacidad de disipación de
energía, y de esta manera incrementar sus posibilidades de supervivencia. El
comportamiento plástico suele concentrarse en rotula plásticas que suelen
representar puntos de daño excesivo en el sistema estructural después de la
excitación sísmica.
El uso de amortiguamiento adicional en edificios de gran altura es una forma de
promover su desempeño satisfactorio ante sismos de gran intensidad. En particular,
una de las maneras en que se puede contrarrestar el daño que puede llegar a
presentarse en los pisos superiores de un edificio como consecuencia de su baja
capacidad de disipar energía y la degradación de su rigidez lateral, es la adición de
amortiguamiento adicional.
Los dispositivos y sistemas que generan amortiguamiento adicional en las
estructuras han incrementado su uso en los últimos años debido a que han
demostrado su efectividad durante varios sismos recientes. Algunos de estos
dispositivos mantienen en lo esencial sus propiedades durante la excitación sísmica,
y son conocidos como disipadores pasivos de energía. Este tipo de dispositivos
puede clasificarse a su vez en viscosos, visco-elásticos e histeréticos. Otro tipo de
dispositivos “ajustan” sus propiedades en función de la respuesta dinámica de la
edificación a la que se añaden. A estos se les conoce como dispositivos activos.

7
1.4.- Contribución de los Proyectos Terminales
El objetivo de estos proyecto terminales es estudiar la efectividad del
amortiguamiento adicional para controlar la respuesta dinámica de edificaciones de
gran altura ubicadas en la Zona de Lago del Distrito Federal. Para ello se varía el
nivel de amortiguamiento viscoso en modelos simples que representan edificios de
diferente altura, y se les sujeta a excitaciones sísmicas con diferentes características
generadas en dicha zona.

8
2.- Sistema Estructurales bajo consideración.
Conforme se muestra en la Figura 2.1, se consideran edificaciones de 10, 20, 30, 40
y 50 pisos. La Figura 2.2 muestra que los modelos de los edificios se plantearon
como una serie de resortes traslacionales y masas. En particular, mientras que una
masa concentra toda la masa del entrepiso, su rigidez lateral queda concentrada en
un resorte traslacional. Las Tablas 2.1 y 2.2 resumen los valores de masa y rigidez
lateral asignados a los diferentes entrepisos de los modelos bajo consideración.
Figura 2.1 Modelos bajo consideración
Figura 2.2 Modelado para el edificio de diez pisos

9
Tabla 2.1 Masas de entrepiso (toneladas)
Tabla 2.2 Rigideces de entrepiso (kg/cm)
Para cada uno de los cinco modelos descritos con anterioridad se consideraron cinco
valores de amortiguamiento viscoso. En particular, se les asignó porcentajes de
amortiguamiento crítico de 2, 5, 10, 20 y 30 por ciento.

10
3.- Movimiento del terreno.
Para poder obtener la respuesta dinámica de las edificaciones se usaron los
acelerogramas graficados en las Figuras 3.1 y 3.2. Ambos movimientos del terreno
fueron registrados en la Zona del Lago del Distrito Federal. Mientras que para el
registro Xotepingo se utilizó un factor de escala de 5.736, el movimiento registrado
en la Secretaría de Comunicaciones y Transportes se utilizó sin escalar.
Figura 3.1 Historia de aceleraciones de registro Xotepingo
Figura 3.2 Historia de aceleraciones de registro Secretaria de Comunicaciones y
Transportes, dirección Este-Oeste

11
Las Figuras 3.3 y 3.4 muestran los espectros elásticos de seudo-aceleración
correspondientes a los dos movimientos bajo consideración. Los espectros fueron
obtenidos para un 5% de amortiguamiento crítico. En las figuras T denota periodo,
el cual se da en segundos, y Sa la seudo-aceleración. Conforme muestran las
figuras, mientras que el movimiento registrado en Xotepingo exhibe un periodo
dominante del terreno (Ts) de un segundo, el correspondiente al movimiento
registrado en la Secretaría de Comunicaciones y Transportes es de dos segundos.
Figura 3.3 Espectro de seudo-aceleración, Xotepingo
Figura 3.4 Espectro de seudo-aceleración, Secretaría de Comunicaciones y
Transportes

12
4.- Dinámica de sistemas de varios grados de libertad.
La Respuesta dinámica de un sistema de varios grados de libertad está representada por los
desplazamientos laterales de las masas, las cuales indican el número modos de vibrar que
tienen las estructuras. Al superponer la vibración de cada masa obtendremos la respuesta
total del sistema. Ahora cada modo de vibrar tiene un periodo independiente a los demás
modos lo cual nos permite usarlo como un sistema simple o de un grado de libertad.
Ecuación de Movimiento.
Donde [M],[C] y [K] son las Matrices de masas, amortiguamiento y rigidez
respectivamente y {u’’},{u’}y{u} los Vectores de aceleración, velocidad y desplazamiento
respectivamente. P(t) la carga arbitraria aplicada al estructura. Para n pisos con vigas
infinitamente rígidas las matrices [M] y [K] son:
La matriz M es diagonal para este estudio será diagonal debido a que no se toman los giros
de los grados de libertad, por lo que quedaría.
Y la matriz K quedaría de la siguiente forma considerando un sistema cercanamente
acoplado.

13
Debido a que la Matriz C de amortiguamiento no es practico determinarla, la expresaremos
en términos de coeficiente de amortiguamiento (ξ). Como sabemos es parte importante de
la cual trata este estudio, el uso de amortiguamiento adicional en estructuras de gran altura.
Análisis Modal
Para determinar la respuesta dinámica de las estructuras se utilizo el procedimiento de
análisis modal, obteniendo la respuesta máxima de cada modo y así después combinarlos
para conseguir su respuesta total.
Si la respuesta dinámica de una estructura depende de su frecuencia o periodo de vibración,
y forma desplazada. El primer paso es obtener el estos datos considerando que en este
análisis no existen fuerzas externas y el amortiguamiento es cero.
La vibración Libre de un sistema no amortiguado en uno de sus modos de vibrar se describe
de la siguiente forma:
Donde es una coordenada de referencia modal y es la forma de la deformada del
movimiento o modo de vibrar, no varía con el tiempo y la variación de desplazamiento con
el tiempo es descrita por una función armónica.
A y B son constantes de integración que pueden ser obtenidas a partir de condiciones
iníciales. Si sustituimos en la ecuación anterior.
Sustituyendo esta forma de en la ecuación inicial tenemos:

14
La Ecuación anterior debe satisfacer las siguientes dos condiciones:
Donde y son desconocidos y denotan los eigenvalores y los eigenvectores
respectivamente de donde se obtienen los periodos y los modos de vibra de las estructuras.
Combinación de Respuestas máximas Modales.
Después de haber sido calculados el valor de los desplazamientos máximos para cada modo
de vibrar, se lleva a cabo una combinación de estos valores modales que nos permite
obtener la respuesta máxima de la estructura.
Método SRSS (Square Root of the Sum of the Squares) Raíz cuadrada de la suma de los
cuadrados.
Método CQC (Complete Quadratic Combination) Combinación cuadrática completa.
Con
y ξ = coeficiente de amortiguamiento que se supone constante en todos los
modos de vibrar.

15
5.- Respuesta estructural
Después de haber idealizado las estructuras, considerar los movimientos del suelo a los que
fueron sometidas así como hacer una pequeña ilustración de la dinámica de sistemas de
varios grados de libertad y con la ayuda de un programa realizado en MATLAB el cual se
describe en el Anexo 1 . Hemos obtenido la respuesta dinámica de nuestros sistemas
A continuación se presentan los tres primeros periodos de vibración de cada una de las
edificaciones que se consideraron según los niveles.
Niveles Periodos
1 2 3
10 0.4038 0.1576 0.0999
20 0.8671 0.3778 0.2379
30 1.5684 0.6149 0.3951
40 2.4722 0.9487 0.6046
50 3.5463 1.4906 0.9139
En las primeras imágenes se muestran los espectros de resistencia junto con las abscisas de
los tres primeros periodos de vibrar de las cinco estructuras.
Y en las páginas siguientes se publica los valores máximos de desplazamientos y
distorsiones, así como los tres primeros modos de vibrar. Empezando de izquierda a
derecha las imágenes exponen la grafica de la respuesta total del edificio siguiendo las
graficas de los modos de vibrar. El contraste que se revela nos indica el nivel de
amortiguamiento que se agrego siendo la más clara la de menor 2% y la más obscura la de
mayor amortiguamiento 30%.
La ultima serie de imágenes indica los cocientes obtenidos al dividir el valor máximo de
desplazamiento y distorsión que arroja el porcentaje de amortiguamiento que se adiciono a
la estructura después de realizar el análisis dinámico entre el 5% de amortiguamiento que
es el consumido normalmente por las estructuras
El conjunto de graficas han sido obtenidas en primer lugar con el acelerograma de
Xotepingo siendo el segundo grupo de resultados correspondiente al acelerograma de
SCT.

16

17

18
XOTEPINGO
Edificio de 10 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 1.3024 1.3552 1.4256 1.4347 1.4152
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 0.2037 0.2066 0.2129 0.213 0.2099
Piso 1 1 1 1 1

19
Edifico de 20 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 8.5981 10.4519 14.4186 18.5927 23.4395
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 0.7703 0.8968 1.2002 1.5383 1.9358
Piso 14 14 13 13 13

20
Edificio de 30 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 16.14 18.1992 20.8938 24.7797 31.8482
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 1.1418 1.1386 1.2419 1.4454 1.8576
Piso 25 25 21 21 21

21
Edifico de 40 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 26.5283 33.987 45.5092 65.8286 92.7398
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 1.9602 2.2168 2.7547 3.669 5.9275
Piso 33 33 33 33 33

22
Edificio de 50 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 41.5036 51.5012 69.1116 83.3064 97.0944
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 4.1361 4.0199 4.0639 4.3695 5.9385
Piso 49 49 48 46 48

23
SCT
Edificio de 10 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 1.0221 1.0645 1.1231 1.206 1.3618
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 0.1608 0.1629 0.168 0.1793 0.2019
Piso 1 1 1 1 1

24
Edificio de 20 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 5.7978 6.0334 6.3911 6.7831 7.2757
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 0.5311 0.5325 0.5446 0.572 0.614
Piso 14 14 14 14 14

25
Edificio de 30 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 23.5163 28.0608 34.5872 40.6755 50.4792
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 1.4223 1.6401 1.9737 2.3024 2.8443
Piso 21 21 21 21 21

26
Edificio de 40 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 50.3642 68.6081 109.6736 151.6532 191.4366
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 2.4897 3.0053 4.7339 6.5249 8.2296
Piso 33 25 25 25 25

27
Edificio de 50 pisos.
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Desplazamiento Máximo(cm) 52.746 59.4204 67.6714 80.1321 88.4144
ξ(% de amortiguamiento) 30% 20% 10% 5% 2%
Distorsión Máxima(cm) 3.8761 3.6576 3.5435 3.885 4.5928
Piso 49 46 46 46 46

28
Xotepingo
Cocientes obtenidos al dividir el valor máximo que arroja el porcentaje de amortiguamiento
que se adiciono a la estructura después de realizar el análisis dinámico entre el 5% de
amortiguamiento que es el consumido normalmente por las estructuras utilizando el
acelerograma de Xotepingo, con un periodo dominante del terreno de 1seg.
Respuesta Máxima
Modo 1
Modo 2
Modo 3
29
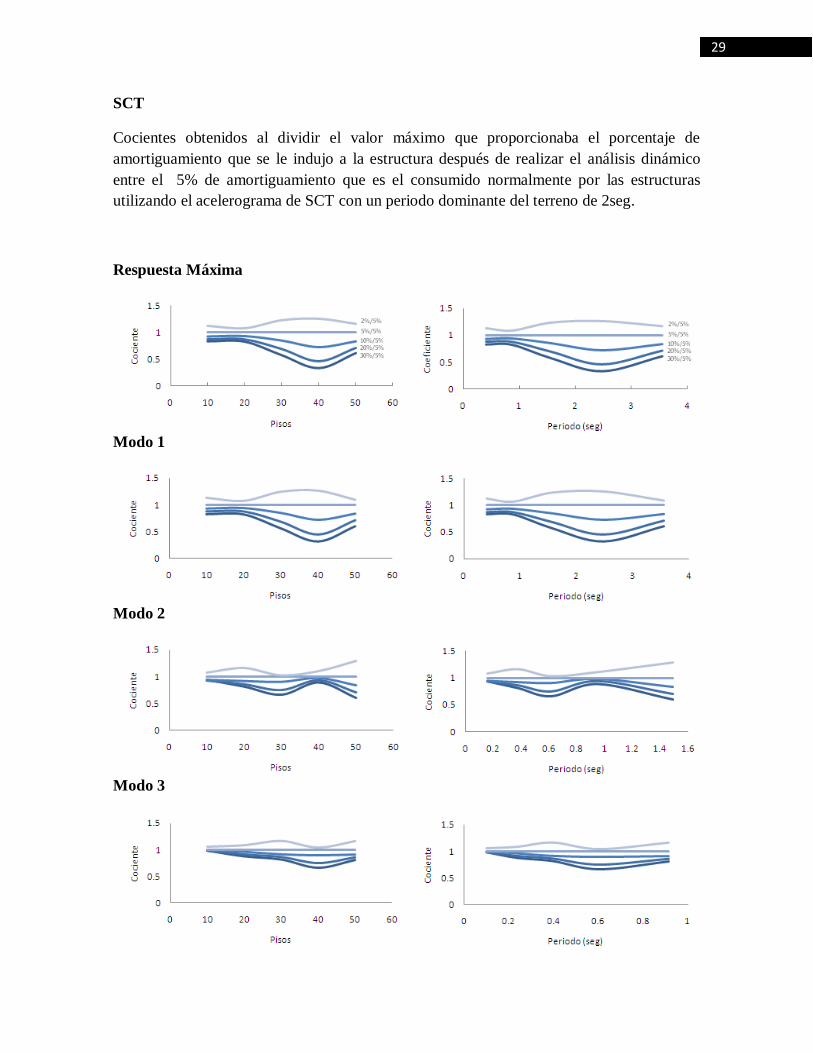
SCT
Cocientes obtenidos al dividir el valor máximo que proporcionaba el porcentaje de
amortiguamiento que se le indujo a la estructura después de realizar el análisis dinámico
entre el 5% de amortiguamiento que es el consumido normalmente por las estructuras
utilizando el acelerograma de SCT con un periodo dominante del terreno de 2seg.
Respuesta Máxima
Modo 1
Modo 2
Modo 3

30
6.- Anexo I
Clear;
%%%%%%%% CÁLCULO DE LA RESPUESTA DINÁMICA DE UN EDIFICIO %%%%%%%%
%%%%%%%% SISMOS DE MEXICO %%%%%%%%
%%%%%%% INTRODUCCION DE VARIABLES %%%%%%%
% CARÁCTERISISTICAS EDIFICIO %
Num_pis =50;
Amo_edi1 = .02; % en porcentaje %
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%% CREACION DE MATRICES DEL EDIFICIO %%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%% MATRIZ DE MASA %%%%
%%%% M_edi %%%%
load Masas.m
Masas = flipud(Masas);
M_edi = zeros(Num_pis,Num_pis);
for i=1:Num_pis
M_edi(i,i) = Masas(i);
end
%%%% MATRIZ DE RIGIDEZ, MATRIZ MODAL Y MATRIZ DE FRECUENCIAS PROPIAS %%%%
%%%% K_edi , Phi_edi y W_edi %%%%
load Rigidez.m
Rigidez = flipud(Rigidez);
K_edi = zeros(Num_pis,Num_pis);
K_edi(1,1) = Rigidez(1) + Rigidez(2);
K_edi(1,2) = -Rigidez(2);
for i = 2:(Num_pis-1)
K_edi(i,i) = Rigidez(i) + Rigidez(i+1);
K_edi(i,i-1) = -Rigidez(i);
K_edi(i,i+1) = -Rigidez(i+1);
end
K_edi(Num_pis,Num_pis-1) = -Rigidez(Num_pis);
K_edi(Num_pis,Num_pis) = Rigidez(Num_pis);
[A,W2] = eig(K_edi,M_edi);
W = sqrt(W2);
for i = 1:Num_pis
T(i) = (2*pi)./W(i,i);
end

31
for i = 1:Num_pis
for j = i+1:Num_pis
if T(i) < T(j)
aux = T(i);
T(i) = T(j);
T(j) = aux;
auxv = A(:,i);
A(:,i) = A(:,j);
A(:,j) = auxv;
end
end
end
T(1:9)'
for i = 1:Num_pis
B(1,i) = A(1,i);
for j = 2:Num_pis
B(j,i) = A(j,i) - A(j-1,i);
end
end
%%%% Masas Modales %%%%
%%%% %%%%
unos = ones(Num_pis,1);
Masatot = sum(sum(M_edi));
for i = 1:Num_pis
mast(i) = A(:,i)'*M_edi*A(:,i);
L1(i) = A(:,i)'*M_edi*unos;
Porcen_masa(i) = L1(i)^2/mast(i)/Masatot;
end
Porcen_masa(1:9)'
Phi_edi = A;
W_edi = W;
%%%% Movimiento del terreno %%%%
%%%% %%%%
%load UC448904.m
load DX378904.m
%load SCTEW.dat
%load tg1n5.txt
%Sismo = UC448904(:,1);
%Sismo = Sismo * 3.673;
Sismo = DX378904(8000:18000,1);
Sismo = Sismo * 5.736;
%Sismo = SCTEW;
%Sismo = Sismo * 1;
%Sismo = tg1n5*0.1975*981;
N_puntos=length(Sismo);
Delta_T = 0.005;
%Delta_T = 0.015;
%Delta_T = 0.020;

32
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%% Método de Newmark %%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Num_modos = 9;
for i = 1: Num_modos
mm = mast(i);
Tm = T(i);
wm = 2*pi/Tm;
cm = 2*mm*wm*Amo_edi1;
km = mm*wm^2;
facm = L1(i)/mm;
Sismom = facm*Sismo;
%1. Cálculos iniciales
quant = 0;
qvant = 0;
qwant = Sismom(1);
a = 4*mm/Delta_T + 2*cm;
b = 2*mm;
%2. Iteraciones
for j = 2:N_puntos
Delta_P = (Sismom(j)-Sismom(j-1))*mm + a*qvant + b*qwant;
K_efec = km + 2*cm/Delta_T + 4*mm/Delta_T^2;
Delta_qu = Delta_P/K_efec;
Delta_qv = 2/Delta_T*Delta_qu - 2*qvant;
qupost = quant + Delta_qu;
qvpost = qvant + Delta_qv;
qwpost = (mm*Sismom(j) - cm*qvpost - km*qupost)/mm;
q_post(j,i) = qupost;
quant = qupost;
qvant = qvpost;
qwant = qwpost;
end
end
u_post = zeros(Num_pis+1,N_puntos);
deriva = zeros(Num_pis+1,N_puntos);
sumabs = zeros(Num_pis+1,2);
srss = zeros(Num_pis+1,2);
cqc = zeros(Num_pis+1,2);
sumder = zeros(Num_pis+1,2);
srsder = zeros(Num_pis+1,2);
cqcd = zeros(Num_pis+1,2);
for i = 1:N_puntos
for j = 1:Num_modos
u_post(2:Num_pis+1,i) = u_post(2:Num_pis+1,i) + A(:,j)*q_post(i,j);
deriva(2:Num_pis+1,i) = deriva(2:Num_pis+1,i) + B(:,j)*q_post(i,j);
end
end

33
umodo1 = A (:,1)*max (abs (q_post (:,1)));
umodo2 = A (:,2)*max (abs (q_post (:,2)));
umodo3 = A (:,3)*max (abs (q_post (:,3)));
dmodo1 = B (:,1)*max (abs (q_post (:,1)));
dmodo2 = B (:,2)*max (abs (q_post (:,2)));
dmodo3 = B (:,3)*max (abs (q_post (:,3)));
for j = 1:Num_modos
sumabs (2:Num_pis+1,1) = sumabs(2:Num_pis+1,1) +
abs(A(:,j))*max(abs(q_post(:,j)));
srss (2:Num_pis+1,1) = srss (2:Num_pis+1,1) +
(A(:,j)*max(abs(q_post(:,j)))).^2;
sumder (2:Num_pis+1,1) = sumder(2:Num_pis+1,1) +
abs(B(:,j))*max(abs(q_post(:,j)));
srsder (2:Num_pis+1,1) = srsder(2:Num_pis+1,1) +
(B(:,j)*max(abs(q_post(:,j)))).^2;
for i = 1:Num_modos
betaij = T(j)/T(i);
roij = (8*Amo_edi1^2*(1+betaij)*betaij^1.5)/((1-
betaij^2)^2+4*Amo_edi1^2*betaij*(1+betaij)^2);
cqc (2:Num_pis+1,1) = cqc (2:Num_pis+1,1) +
(A(:,j).^2*roij*max(abs(q_post(:,j)))*max(abs(q_post(:,i))));
cqcd(2:Num_pis+1,1) = cqcd(2:Num_pis+1,1) +
(B(:,j).^2*roij*max(abs(q_post(:,j)))*max(abs(q_post(:,i))));
end
end
srss = sqrt(srss);
cqc = sqrt(cqc);
srsder = sqrt(srsder);
cqcd = sqrt(cqcd);
sumabs(2:Num_pis+1,2) = -sumabs(2:Num_pis+1,1);
srss (2:Num_pis+1,2) = -srss (2:Num_pis+1,1);
cqc (2:Num_pis+1,2) = -cqc (2:Num_pis+1,1);
sumder(2:Num_pis+1,2) = -sumder(2:Num_pis+1,1);
srsder(2:Num_pis+1,2) = -srsder(2:Num_pis+1,1);
cqcd (2:Num_pis+1,2) = -cqcd (2:Num_pis+1,1);
z=0:Num_pis;
tt = (1:N_puntos)*Delta_T;
tmax = N_puntos*Delta_T;
for j=1:10:N_puntos
subplot(2,2,1)
plot (u_post(:,j),z,'o',u_post(:,j),z)
axis([-100 100 0 Num_pis+2])
xlabel('Desplazamiento (cm)')
ylabel('Nivel')
title('Historia para amortiguamiento %')
subplot (2,1,2)
plot (tt(1:j),Sismo(1:j))
axis([0 tmax -200 200])
xlabel('Tiempo (seg)')
ylabel('Aceleración (cm/seg2)')
%title('Xotepingo EO, Factor de Escala 5.736 => Amax = 0.1975g')
%title('SCTWE, Factor de Escala 1')
subplot(2,2,2)

34
plot (deriva(:,j),z,'o',deriva(:,j),z)
axis([-15 15 0 Num_pis+2])
xlabel('Deriva (cm)')
ylabel('Nivel')
title('Historia para amortiguamiento %')
F(j)=getframe;
end
pause
umax = max(u_post');
umin = min(u_post');
umax2 = max(deriva');
umin2 = min(deriva');
subplot(2,2,1)
plot (umax,z,'o',umax,z)
Hold on
plot (umin,z,'o',umin,z)
axis([-150 150 0 Num_pis+2])
xlabel('Desplazamiento (cm)')
ylabel('Nivel')
title('Envolvente para amortiguamiento %')
subplot(2,2,2)
plot (umax2,z,'o',umax2,z)
Hold on
plot (umin2,z,'o',umin2,z)
axis([-15 15 0 Num_pis+2])
xlabel('Deriva (cm)')
ylabel('Nivel')
title('Envolvente para amortiguamiento %')
pause
umax = sumabs(:,1);
umin = sumabs(:,2);
umax2 = srss (:,1);
umin2 = srss (:,2);
umax3 = cqc (:,1);
umin3 = cqc (:,2);
subplot(2,2,1)
plot (umax,z,'x',umax,z,umax2,z,'x',umax2,z,umax3,z,'x',umax3,z)
plot (umin,z,'x',umin,z,umin2,z,'x',umin2,z,umin3,z,'x',umin3,z)
axis([-150 150 0 Num_pis+2])
xlabel('Desplazamiento (cm)')
ylabel('Nivel')
title('Envolvente para amortiguamiento %')
umaxd = sumder(:,1);
umind = sumder(:,2);
umax2d = srsder(:,1);
umin2d = srsder(:,2);
umax3d = cqcd (:,1);
umin3d = cqcd (:,2);

35
subplot(2,2,2)
plot (umaxd,z,'x',umaxd,z,umax2d,z,'x',umax2d,z,umax3d,z,'x',umax3d,z)
plot (umind,z,'x',umind,z,umin2d,z,'x',umin2d,z,umin3d,z,'x',umin3d,z)
axis([-15 15 0 Num_pis+2])
xlabel('Deriva (cm)')
ylabel('Nivel')
title('Envolvente para amortiguamiento %')
pause
delete(1)

36
6.- Bibliografía
TERÁN, Amador y ARROYO, Danny. (2006) “Efecto de la degradación de rigidez en el
desempeño sísmico de los pisos superiores de edificaciones desplantadas en la Zona del
Lago del D.F.”, XV Congreso Nacional de Ingeniería Estructural, Puerto Vallarta Jalisco.
BAZÁN, Enrique y MELI, Roberto. (2008) “Diseño Sísmico de Edificios”, Ed. Limusa
S.A de C.V., México D.F.
GÓMEZ, Salvador I. (2007) “Análisis Sísmico Moderno” Ética Aplicada, Ed. Trillas,
México D.F.
TERÁN, Amador (2008) “Ingeniería Sísmica”, Unidad de Enseñanza Aprendizaje, UAM-
Azcapotzalco, México D.F.
CHOPRA, Anil K. (1995) “Dynamics of Structures”, theory and applications to
earthquake engineering, University of California at Berkeley, Editorial Prentice Hall, New
Jersey, Estados Unidos.
PAZ, Mario. (1991) “Dinámica estructural: teoría y cálculo” Ed. Reverte
Páginas Web de la Universidad Mayor de San Simón Bolivia
http://www.umss.edu.bo/epubs/etexts/downloads/19/default.htm


















