RED DE SENSORES INALÁMBRICA PARA MONITORIZACIÓN...
89
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS EDUARDO HIDALGO FORT 1 RED DE SENSORES INALÁMBRICA PARA MONITORIZACIÓN ESTRUCTUAL DE EDIFICIOS UNIVERSIDAD DE SEVILLA ESCUELA SUPERIOR DE INGENIEROS DE SEVILLA INGENIERÍA DE TELECOMUNICACIÓN DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA Autor: Eduardo Hidalgo Fort Tutor: Fernando Muñoz Chavero
Transcript of RED DE SENSORES INALÁMBRICA PARA MONITORIZACIÓN...

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
1
RED DE SENSORES INALÁMBRICA PARA MONITORIZACIÓN
ESTRUCTUAL DE EDIFICIOS
UNIVERSIDAD DE SEVILLA
ESCUELA SUPERIOR DE INGENIEROS DE SEVILLA
INGENIERÍA DE TELECOMUNICACIÓN
DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA
Autor: Eduardo Hidalgo Fort
Tutor: Fernando Muñoz Chavero

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
2

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
3
A mis padres, por enseñarme unos valores en la
vida y por darme la oportunidad de realizar mis
estudios.
A mis hermanos por estar siempre a mi lado
alentándome.
Gracias por todo.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
4
ÍNDICE GENERAL ÍNDICE GENERAL ....................................................................................................... 4
ÍNDICE DE FIGURA ..................................................................................................... 6
ÍNDICE DE TABLA ...................................................................................................... 8
1 INTRODUCCIÓN Y OBJETIVOS ........................................................................ 10
1.1INTRODUCCIÓN ............................................................................................................................. 10
1.2 OBJETIVOS ............................................................................................................................ 11
2 ESTADO DEL ARTE DE LAS TECNOLOGÍAS DE MONITORIZACIÓN DE
SALUD ESTRUCTURAL ............................................................................................ 14
2.1 TECNOLOGÍAS DE MONITORIZACIÓN ................................................................................ 14
2.1.1 Subsistemas de un sistema de monitorización de salud estructural ............................... 15
2.1.2 Plataformas existentes ................................................................................................... 18
2.1.3 Comparativa Bluetooth / ZigBee ..................................................................................... 30
2.1.4 Sistemas empotrados ..................................................................................................... 31
2.1.5 Determinación de cuatro niveles de sistemas de monitorización (de menor a mayor
complejidad) [4]: ................................................................................................................................ 32
2.1.6 Tipos de seguimiento ...................................................................................................... 32
2.1.7 Tipos de análisis. ............................................................................................................ 33
2.1.8 Estudio de las Tecnologías SHM a través de ejemplos representativos. ....................... 33
2.2 ALGORITMOS PARA LA IDENTIFICACIÓN DE RIESGOS EN ESTRUCTURAS ................. 39
3 VISIÓN GENERAL DEL ESTÁNDAR 802.15.4 ................................................... 43
3.1 TOPOLOGÍAS DE RED .......................................................................................................... 44
3.1.1 Formación de la estructura de la red en estrella ............................................................. 45
3.1.2 Formación de la estructura de red peer-to-peer ............................................................. 45
3.2 ARQUITECTURA .................................................................................................................... 46
3.2.1 Capa física ...................................................................................................................... 47
3.2.2 Capa MAC ...................................................................................................................... 47
3.3 VISTA GENERAL DEL FUNCIONAMIENTO .......................................................................... 47
3.3.1 Estructura Supertrama .................................................................................................... 47
3.3.2 Modelo de transmisión de datos ..................................................................................... 48
3.3.3 Sincronización ................................................................................................................ 51
3.3.4 Coordinación de transacción .......................................................................................... 52
4 MODELADO DE UNA ESTRUCTURA ................................................................ 55
4.1 MODELADO DE UNA ESTRUCTURA .................................................................................... 55
4.1.1 Métodos de cálculo simplificados para los casos más usuales de edificación................ 55
4.2 INSTALACIÓN EN EL MODELO A ESCALA .......................................................................... 60
4.2.1 Objetivo........................................................................................................................... 60

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
5
4.3 INSTALACIÓN EN EL EDIFICIO REAL .................................................................................. 61
4.3.1 Objetivo........................................................................................................................... 61
5 PROPUESTA DE ESPECIFICACIONES PARA UN SISTEMA SHM .................. 64
5.1 PROPUESTA DE ESPECIFICACIONES ................................................................................ 65
5.1.1 Obtención de las especificaciones .................................................................................. 65
5.1.2 Algunos diseños propuestos ........................................................................................... 72
5.2 PROPUESTA DE COMPONENTES HARDWARE ................................................................. 78
5.2.1 Acelerómetro .................................................................................................................. 78
5.2.2 Termómetro .................................................................................................................... 79
5.2.3 Anemómetro ................................................................................................................... 80
5.2.4 ADC ................................................................................................................................ 80
5.2.5 Microprocesador ............................................................................................................. 81
5.2.6 Transceptor inalámbrico ................................................................................................. 81
6 CONCLUSIONES Y LÍNEAS FUTURAS DE INVESTIGACIÓN .......................... 85
6.1 CONCLUSIONES ................................................................................................................... 85
6.1.1 Análisis del trabajo realizado .......................................................................................... 85
6.1.2 Objetivos alcanzados ...................................................................................................... 85
6.2 LÍNEAS FUTURAS DE INVESTIGACIÓN............................................................................... 86
7 BIBLIOGRAFÍA ................................................................................................... 89
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
6
ÍNDICE DE FIGURAS
Figura 1. Acelerómetro MEMS ......................................................................................................... 16
Figura 2. Sistema cableado. Cañón de Alamosa .............................................................................. 17
Figura 3. Sistema Inalámbrico. Cañon Alamosa ............................................................................. 17
Figura 4. Izquierda: sistema inalámbrico. Derecha: sistema cableado ........................................ 34
Figura 5. Sistema instalado ................................................................................................................ 34
Figura 6. Entrada al sistema .............................................................................................................. 35
Figura 7. Respuesta de los acelerómetros ......................................................................................... 35
Figura 8. Espectro en frecuencia de la respuesta de la estructura ................................................ 35
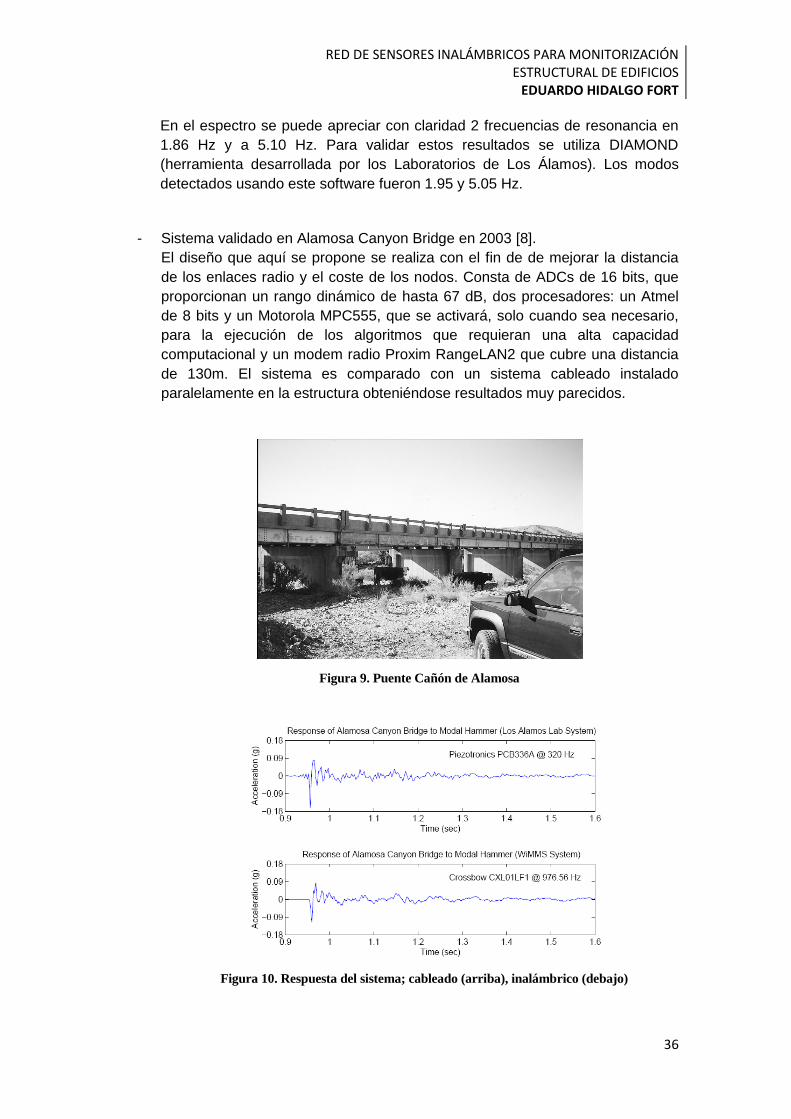
Figura 9. Puente Cañón de Alamosa ................................................................................................. 36
Figura 10. Respuesta del sistema; cableado (arriba), inalámbrico (debajo) .................................. 36
Figura 11. Funciones de respuesta en frecuencia del sistema cableado e inalámbrico ................. 37
Figura 12. Segundo piso:(a) Sistema cableado y (b) sistema con MICA2. Base: (c) aceleración
por sistema cableado y (d) aceleración por sistema con MICA2 .................................. 37
Figura 13. Puente Geumdang (a y b) y configuraciones 1 (c) y 2 (d) .............................................. 38
Figura 14. Repuesta de los sensores en varias configuraciones ....................................................... 38
Figura 15. Nodo, antena y batería instalada en el centro de la construcción ................................. 39
Figura 16. Resultados obtenidos de Simulación mediante Elementos Finitos, Abdel Ghaffar
(otro método validado) y en este estudio .......................................................................... 39
Figura 17. Topologías de red 802.15.4 ................................................................................................ 44
Figura 18. Topología Cluster Tree ...................................................................................................... 46
Figura 19. Arquitectura de capas ........................................................................................................ 46
Figura 20. Estructura Supertrama ..................................................................................................... 48
Figura 21. Estructura Supertrama con CFP ..................................................................................... 48
Figura 22. Comunicación con un coordinador en una PAN con balizas ........................................ 49
Figura 23. Comunicación con un coordinador en una PAN sin balizas ......................................... 49
Figura 24. Transmisión desde un coordinador en una PAN con balizas ....................................... 50
Figura 25. Transmisión desde un coordinador en una PAN sin balizas ......................................... 50
Figura 26. Algoritmo AR – ARX ......................................................................................................... 57
Figura 27. Esquema de los diferentes tipos de estructuras .............................................................. 59
Figura 28. Esquema de construcciones con suelos rígidos ............................................................... 59
Figura 29. Esquema de bloques de un nodo ....................................................................................... 64
Figura 30. Acelerograma Cañón Alamosa ......................................................................................... 66
Figura 31. Respuesta en frecuencia Cañón Alamosa ........................................................................ 66

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
7
Figura 32. Prueba de laboratorio ........................................................................................................ 67
Figura 33. Modelo I ............................................................................................................................... 72
Figura 34. Modelo II ............................................................................................................................. 74
Figura 35. Modelo III ............................................................................................................................ 77
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
8
ÍNDICE DE TABLAS
Tabla 1. Sistemas Académicos I ........................................................................................................ 19
Tabla 2. Sistemas Académicos II ....................................................................................................... 21
Tabla 3. Sistemas comerciales ........................................................................................................... 27
Tabla 4. Comparativa Bluetooth - ZigBee ........................................................................................ 30
Tabla 5. Capa física IEEE 802.15.4 ................................................................................................... 44
Tabla 6. ADS7821 ............................................................................................................................... 73
Tabla 7. ADS8341alimentado a 5V ................................................................................................... 75
Tabla 8. ADS8341 alimentado a 2.7V ............................................................................................... 75
Tabla 9. Transceptor MaxStream 9XCite ........................................................................................ 76
Tabla 10. ADXL335 ............................................................................................................................ 78
Tabla 11. TMP105 .............................................................................................................................. 79
Tabla 12. Ornytion 107 ...................................................................................................................... 80
Tabla 13. ADS1115 ............................................................................................................................. 80
Tabla 14. TI CC1000 RF .................................................................................................................... 82

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
9
CAPÍTULO 1
Introducción y Objetivos
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
10
1. INTRODUCCIÓN Y OBJETIVOS
1.1. INTRODUCCIÓN
Para comenzar este proyecto y situarnos en un marco de trabajo, lo primero que
hemos de hacer es explicar qué son las Tecnologías de Monitorización de la Salud
Estructural (SHM, Structural Health Monitoring en inglés). Es un sistema para analizar
el comportamiento de una estructura civil de una forma eficiente para evaluar su
rendimiento, posibles deterioros y para determinar la salud de la estructura.
SHM es una expresión que ha emergido desde hace menos de 20 años. El término
SHM empezó a ser utilizado a finales de la década de 1980, aunque en el campo de la
aviación puede considerarse a partir de 1950. Proviene del campo “smart structures”,
un campo que se refiere a la idea de hacer dispositivos sensores y actuadores e
integrarlos en una estructura.
El hecho de que haya multitud de investigadores estudiando las SHM y empresas
desarrollando sistemas y técnicas de monitorización han hecho posible que se esté
alcanzando el objetivo de sistemas de bajo coste. También se ha producido un
mejoramiento en cuanto a los materiales de fabricación y en la tecnología de
procesado, en el contexto de la composición de materiales, lo cual permite que los
dispositivos de sensado puedan ser integrados en las propias estructuras.
El gran progreso en el ámbito computacional ha permitido que las señales de sensado
puedan ser de mayor complejidad y que puedan ser tratadas cerca de la unidad de
sensado, incluso cerca de la fuente de daños (o parte de la estructura dañada),
mientras que el procesado de las señales que necesite mayor capacidad
computacional se puede realizar en otras localizaciones. Estas transmisiones de datos
la podremos realizar mediante sistemas cableados o inalámbricos, de los cuales
hablaremos detalladamente a lo largo de este documento.
Los sistemas de infraestructuras civiles son críticos para el crecimiento económico de
un país y la seguridad pública. Al igual que ocurre con los sistemas SHM, ocurre con
las infraestructuras, cada vez los códigos de diseño de éstas y la práctica son mejores
y cada vez se construyen infraestructuras mas robustas y por tanto, menos propensas
a fallos. Sin embargo existen condiciones extremas de trabajo, como terremotos,
sobrecargas, etc. que pueden hacer que la estructura tenga un comportamiento
anómalo.
En cuanto a los tipos de análisis, SHM se basa en análisis de tipo “non-destructive
testing”. Esto incluye principios basados en esfuerzo, tensión, deformación, vibración,
ondas acústicas, temperatura, etc. Estas señales deberán ser digitalizadas y
procesadas para poder ser analizadas, ya sea en el dominio temporal, como en el
domino de la frecuencia, para lo que podemos hacer uso de la FFT (Fast Fourier
Transform). Sin embargo, esto puede no ser suficiente para la interpretación de la
información y puede ser necesario tener una serie de referencias para poder
caracterizar las condiciones de estructura dañada.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
11
En el área de la investigación y desarrollo, SHM está evolucionando en varias
disciplinas, desde los principios de deterioración de los materiales y la monitorización,
hasta el procesado de las señales, los sensores, simulaciones, etc.
Una vez que conocemos el marco de trabajo en el que nos movemos, lo siguiente es
justificar la utilización de estas tecnologías en el presente proyecto. Es bastante lógico
que, dado el nivel de tecnología existente, usemos ésta para conocer la salud de las
estructuras civiles así como, para la detección temprana de problemas en la
estructura, para prevenir fallos catastróficos, para minimizar las interrupciones del
servicio que proporcione la estructura en cuestión y para la reducción de los costes de
mantenimiento.
Como es de esperar, con los años se han ido desarrollando y mejorando los sistemas
de monitorización de la salud estructural, cada vez más. Nuestro objetivo no es otro
que continuar con esta tendencia.
1.2. OBJETIVOS
Los objetivos principales del proyecto son los que a continuación se exponen
- Estudio del Estado del Arte de Tecnologías de las Structural Health Monitoring
- Estudio del estándar IEEE 802.15.4.
- Modelado de un edificio
- Estudio detallado de los diferentes algoritmos para la detección, identificación y
localización de daños en estructuras
- Propuesta de especificaciones para un sistema SHM

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
12

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
13
CAPÍTULO 2
Estado del Arte de las
tecnologías de la
Monitorización de Salud
Estructural

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
14
2. ESTADO DEL ARTE DE LAS
TECNOLOGÍAS DE MONITORIZACIÓN DE
SALUD ESTRUCTURAL
2.1. TECNOLOGÍAS DE MONITORIZACIÓN
Los códigos de diseño estructural han demostrado a lo largo de los años ser exitosos,
tanto en el propio diseño de estructuras, como en la prevención de fallos catastróficos
globales. Si bien, una vez que son construidas, las estructuras comienzan a debilitarse
debido a que en ocasiones son sometidas a duras cargas y severas condiciones de
trabajo. Mantener las estructuras en un estado fiable es importante para todos. Una
detección temprana y una evaluación de estos daños se hace necesaria para asegurar
que las estructuras siguen cumpliendo los estándares de seguridad. El proceso de
determinación y seguimiento de la integridad estructural y la evaluación de la
naturaleza de los daños en una estructura es lo que se conoce como Monitorización
de la Salud Estructural (Structural Health Monitoring, SHM).
Idealmente, las tecnologías SHM consisten en determinar la ubicación, la gravedad de
los daños y realizar una predicción a partir de los datos parámetros medidos.
El terremoto de Norhridge en 1994 supuso unos daños en las estructuras ubicadas
dentro del área metropolitana de Los Ángeles de más de 200 millones de dólares.
Después de eventos sísmicos es obligado por ley que las estructuras sean sometidas
a una inspección detallada. Estas inspecciones se realizaban contratando técnicos.
Éstos hacían uso de equipos de medida muy costosos, lo cual, junto a que los técnicos
en ocasiones podían correr algún tipo de riesgo, encarecía el servicio que
proporcionaban (en el terremoto de Norhridge se calcula que el precio de las
inspecciones estaba entre 200 y 1000 dólares por punto de medida). Posteriormente
se comenzaron a desarrollar las tecnologías SHM (se entiende sin necesidad de
personal humano). Los primeros sistemas fueron cableados, que eliminaban la
necesidad de que fuese personal humano el que desarrollara la tarea de evaluar la
estructura (lo cual reducía considerablemente el coste del servicio), pero esto seguía
suponiendo un coste demasiado elevado, pues las dimensiones del cableado pueden
llegar a ser muy grandes (podía suponer hasta un coste de 5000 $ por punto de
medida). Además también había que tener en cuenta el impacto visual del sistema, lo
cual era otro inconveniente. Es por esto que se comenzaron a desarrollar las
tecnologías SHM inalámbricas. Éstas eliminan los problemas anteriormente expuestos,
ya que el impacto visual es mínimo y se han conseguido costes inferiores a 200 $ por
punto de medida. Estos últimos sistemas presentan otras ventajas, como una mayor
densidad de nodos o la facilidad de instalación de nodos.
El hecho de que los costes de dispositivos de computación y las tecnologías de la
comunicación se viesen notablemente disminuidos, a la vez que se seguía cumpliendo
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
15
la Ley de Moore1, dio lugar a que las tecnologías inalámbricas sufrieran grandes
avances. Straser y Kiremidjian (1998) fueron los primeros en proponer la integración
de dispositivos radio en los sensores para reducir el coste de los sistemas. A partir de
ahí han sido numerosos los investigadores que han desarrollado estudios sobre estos
sistemas, como Lynch (2002), Casciati (2004), Glaser (2004), Spencer (2005), etc.
Gracias a estos estudios los sistemas SHM se están convirtiendo en tecnologías
fiables y de bajo costo.
2.1.1. Subsistemas de un sistema de monitorización de salud estructural
Existe una división clara de los elementos de un sistema SHM. El funcionamiento ideal
de un sistema sería poder tomar datos, enviarlos a los nodos encargados de realizar
las tareas computacionales, evaluar los resultados obtenidos después de realizar esas
tareas computacionales y tomar decisiones en función de las diferentes situaciones.
Los bloques necesarios en un sistema para poder realizar estas funciones son [1]:
- Adquisición de datos. Los ejemplos más típicos de características medidas son:
o Tensión. Wang y Pran (2000), entre otros, emplearon sensores de fibra
óptica para monitorizar la flexión vertical, la torsión y las fuerzas
verticales en la cubierta del Norwegian Fast Patrol Boat. El último
objetivo de estas medidas es el cálculo de los momentos globales de
flexión a los que la cubierta del barco estaba expuesta.
o Desplazamiento. Las estructuras se componen de varios componentes
estructurales. El movimiento de éstos elementos puede redistribuir las
cargas de la estructura e incluso provocar algún fallo en la estructura.
Un seguimiento del desplazamiento relativo entre los elementos podría
proporcionar información para evaluar la integridad de la estructura. Así
Su (1998) propone un modelo en el que hace uso de TDR (Time
Domain Reflectometry) para monitorizar los desplazamientos relativos
entre los elementos estructurales.
o Aceleración. Son múltiples las técnicas que se pueden utilizar con los
acelerómetros. A partir de las medidas de estos dispositivos se obtienen
las funciones de respuestas en el dominio de la frecuencia. De estas
funciones es bastante fácil extraer parámetros normalmente usados
para la monitorización de salud estructural como es la frecuencia de
resonancia, por ejemplo.
o Temperatura. Es conocido que el comportamiento de una estructura
puede variar según la temperatura a la que esta se encuentre. Por esto,
un parámetro que parece lógico medir es la temperatura. El fin de estas
medidas es, teniendo las medidas de la temperatura a la que se
encuentra la estructura en general o algún componente en particular,
eliminar el efecto de las mismas en lo que al comportamiento de la
estructura se refiere.
1 Gordon Moore afirmó en 1965, en una entrevista a la revista Electronics, que el número de
transistores por pulgada en circuitos integrados se duplicaría cada año y que la tendencia continuaría
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
16
o Viento. Al igual que con la temperatura, es obvio pensar que el viento
afecta al comportamiento de la estructura. El fin de estas medidas
vuelve a ser el mismo; introducir un parámetro que simule el viento en
el modelo de la estructura y así poder determinar el comportamiento de
la misma.
o Otros. Hay otra serie de parámetros que pueden ser útiles para evaluar
la integridad de la estructura tales como la humedad, la corrosión, etc.
Para obtener estos datos es necesario que la estructura sea excitada, bien por
excitaciones forzadas (son previamente caracterizadas, para que el algoritmo
de detección de daños las tenga en cuenta), las cuales suelen tener la ventaja
de que suelen estar muy por encima de las señales ruidosas que se introducen
en el sistema, bien por excitaciones ambientales (estas son las excitaciones
consideradas cuando la estructura esta bajo condiciones de trabajo normales),
o bien excitaciones locales, las cuales se caracterizan porque excitan solo
afectan a una parte de la estructura.
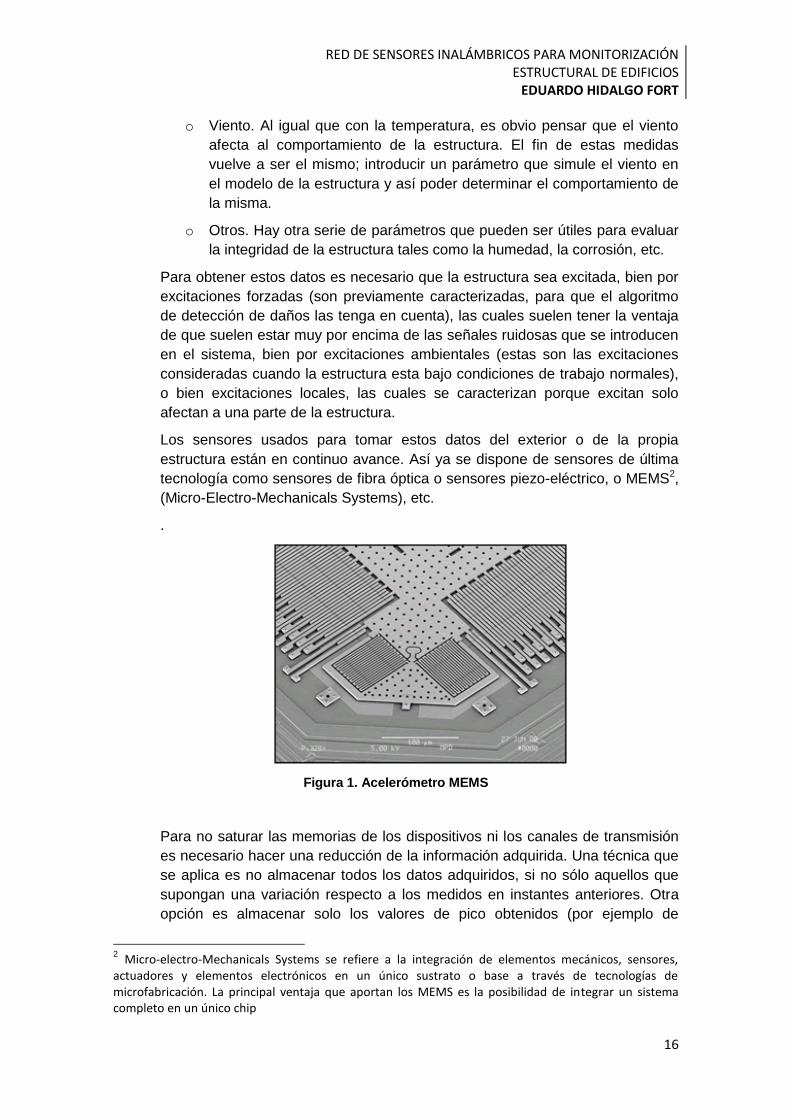
Los sensores usados para tomar estos datos del exterior o de la propia
estructura están en continuo avance. Así ya se dispone de sensores de última
tecnología como sensores de fibra óptica o sensores piezo-eléctrico, o MEMS2,
(Micro-Electro-Mechanicals Systems), etc.
.
Figura 1. Acelerómetro MEMS
Para no saturar las memorias de los dispositivos ni los canales de transmisión
es necesario hacer una reducción de la información adquirida. Una técnica que
se aplica es no almacenar todos los datos adquiridos, si no sólo aquellos que
supongan una variación respecto a los medidos en instantes anteriores. Otra
opción es almacenar solo los valores de pico obtenidos (por ejemplo de
2 Micro-electro-Mechanicals Systems se refiere a la integración de elementos mecánicos, sensores,
actuadores y elementos electrónicos en un único sustrato o base a través de tecnologías de microfabricación. La principal ventaja que aportan los MEMS es la posibilidad de integrar un sistema completo en un único chip

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
17
amplitud, para una evaluación utilizando las formas de modo, más adelante se
explica). Esta elección, de qué datos almacenar, dependerá del algoritmo
seleccionado para la evaluación de la salud de la estructura.
- Comunicación de datos. Cuando se habla de comunicación de datos se refiere
a la transmisión de datos desde los nodos hasta los sistemas coordinadores o
servidores. Esta transmisión puede ser de dos tipos; por cable o inalámbrica.
Son muchas las ventajas que aportan las tecnologías de transmisión
inalámbrica, como las anteriormente mencionadas (reducción de costes e
impacto visual), o una mayor integración, mayor flexibilidad, menor consumo
(pues los nodos están activos menos tiempo), etc. En la siguiente imagen
podemos ver el impacto visual de un sistema cableado (concretamente el que
se instaló en el Cañón de Alamosa, en Nuevo México, para validar un sistema
inalámbrico)
Figura 2. Sistema cableado. Cañón de Alamosa
Figura 3. Sistema Inalámbrico. Cañon Alamosa

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
18
Según Straser (1998) el coste de la instalación en los sistemas cableados está
en torno al 25% del coste del sistema y consume el 75% del tiempo de
instalación de todo el sistema.
- Procesamiento inteligente de datos. Es normal que mucha de la información
que se recoge de los sistemas de adquisición de datos sea inútil o redundante,
por tanto es importante tener en cuenta este factor para poder realizar una
correcta interpretación de los datos. Por ejemplo, en ocasiones hay que realizar
correcciones térmicas debido a que hay sensores que pueden ver afectada su
respuesta en función de la temperatura a la que estén trabajando.
- Almacenamiento de datos procesados. Se entiende por este término al
almacenamiento de los datos listos para poder evaluar la estructura, una vez
realizadas las correcciones necesarias sobre los datos adquiridos en cada
caso.
- Diagnóstico. Se trata de la ejecución del algoritmo o los algoritmos utilizados
para la evaluación de la salud estructural.
2.1.2. Plataformas existentes
Hasta la fecha se han diseñado e implementado multitud de sistemas. A continuación
se presenta una clasificación de los mismos dividiéndolos en sistemas académicos y
comerciales, pero antes se explican una serie de conceptos utilizados durante la
descripción de los sistemas anteriormente mencionados.
- ADC
o Canales A/D. Se trata del número de entradas independientes que es
capaz de digitalizar un convertidor analógico – digital.
o Tasa de Muestreo de un ADC. Es la cantidad de muestras que se
obtienen de la señal analógica. Normalmente se mide en
muestras/segundo
o Resolución A/D. Es el nivel mínimo de tensión (para nuestro caso) que
el convertidor es capaz de digitalizar. Por debajo de ese nivel el
convertidor lo asociará a un nivel de tensión de 0V o a ruido.
o Entradas de datos: Interfaces de entrada desde el ADC al
microcontrolador
- Microcontrolador
o Tamaño de bus de un Microcontrolador. Número de bits de las
direcciones utilizadas por el microcontrolador.
o Velocidad de reloj. Se trata del tiempo que tarda el microcontrolador en
realizar sus operaciones básicas tales como poner un valor en un
registro, realizar una suma, etc.
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
19
o Memoria de programa. Se trata de la memoria donde se almacena el
Sistema Operativo y el Software que utilizará el microcontrolador.
Normalmente es de tipo no volátil.
o Memoria de datos. Es la memoria donde se almacenan los datos
obtenidos, por ejemplo de los sensores. Normalmente estas memorias
son de tipo RAM, para así tener un acceso rápido a los datos.
- Radio
o Frecuencia de trabajo. Es la parte del espectro de frecuencias donde
trabaja el transceptor
o Estándar: Norma de la que se hace uso para transmitir la información.
o Espectro expandido. Se trata de una técnica de modulación de señales
para una transmisión más fiable. Tienen como inconveniente que no
hacen un uso eficiente del espectro de frecuencias.
o Alcance exterior. Distancia salvable entre dos transceptores en un
espacio abierto, sin edificaciones.
o Alcance interior. Distancia salvable entre dos transceptores en el interior
de una zona urbanizada o dentro de un mismo edificio.
o Tasa de datos. Velocidad de transmisión de los datos entre dos
transceptores.
- Otros datos
o Potencia. Potencia consumida por el sistema completo (dependerá del
tiempo que estén encendidos, de la cantidad de datos a transmitir, etc.)
o Alimentación. Modo de alimentación
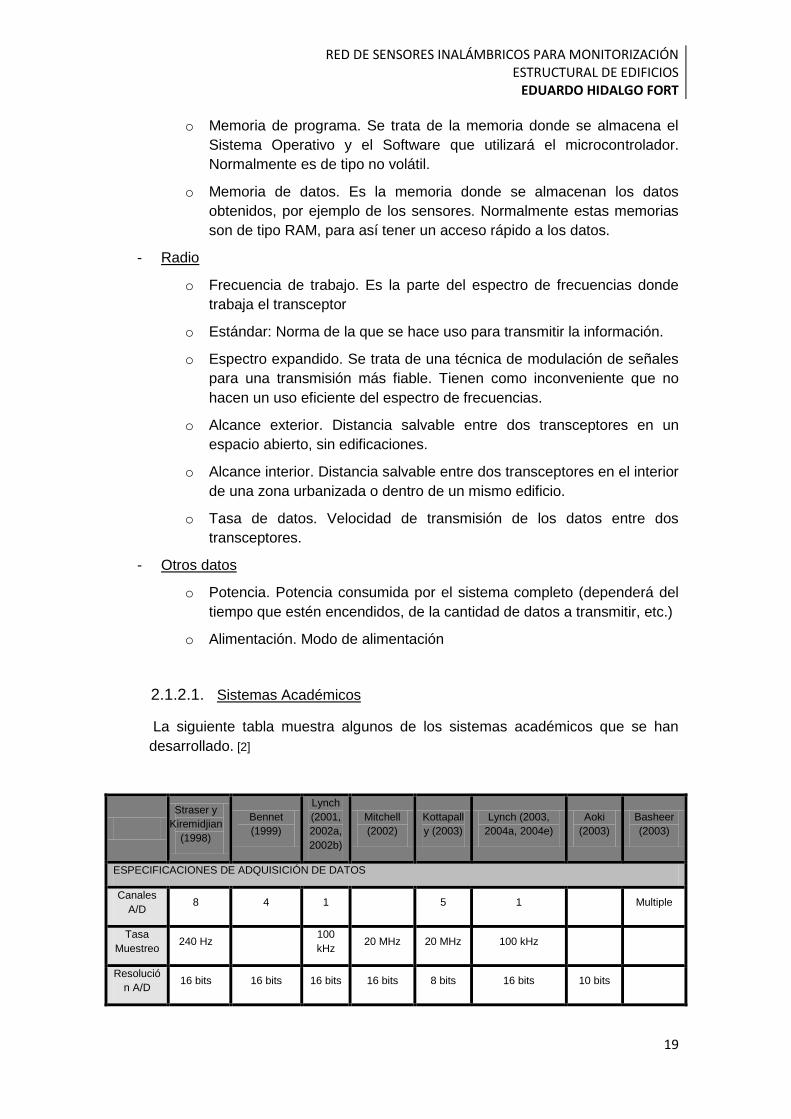
2.1.2.1. Sistemas Académicos
La siguiente tabla muestra algunos de los sistemas académicos que se han
desarrollado. [2]
Straser y
Kiremidjian
(1998)
Bennet
(1999)
Lynch
(2001,
2002a,
2002b)
Mitchell
(2002)
Kottapall
y (2003)
Lynch (2003,
2004a, 2004e)
Aoki
(2003)
Basheer
(2003)
ESPECIFICACIONES DE ADQUISICIÓN DE DATOS
Canales
A/D 8 4 1 5 1 Multiple
Tasa
Muestreo 240 Hz
100
kHz 20 MHz 20 MHz 100 kHz
Resolució
n A/D 16 bits 16 bits 16 bits 16 bits 8 bits 16 bits 10 bits

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
20
Entradas
de datos 0 2 0 2
ESPECIFICACIONES MICROPROCESADOR
Procesa-
dor
Motorola
68HC11
Hitachi
H8/329
Atmel
AVR85
15
Cygnal
8051
Microchi
p
PIC16F7
3
Atmel
AT90S8515
AVR/MPC555Po
werPC
Renesa
s
H8/4069
F
ARM7TD
MI
Tamaño
Bus 8 bits 8 bits 8 bits 8 bits 8 bits 8 bits/32 bits 8 bits 32 bits
Velocidad
Reloj 2,1 MHz 4,9 Hz 4 MHz 20 MHz 4 MHz / 20 MHz 20 MHz
Memoria
Programa 16 kB 32 kB 8 kB 2 kB 4 kB 8 kB/26 kB 128 kB
Memoria
Datos 32 kB 32 kB 128 kB 192 kB 512 kB/448 kB 2 MB
ESPECIFICACIONES WIRELESS
Radio Proxim
ProxLink
Radiometri
x
Proxim
Range
LAN2
Ericsson
Bluetooth
BuleChi
p
RBF915
Proxim
RangeLAN2
Realtek
RTL801
9AS
Phillips
Blueberry
Bluetooth
Frecuen-
cia 900 MHz 418 MHz
2.4
GHz 2.4 GHz
900
MHz 2.4 GHz 2.4 GHz
Estándar 802.15.1 802.15.1
Espectro
Expandi-
do
Si No Si Si Si Si No Si
Alcance
Exterior 300 m 300 m 300 m 10 m 500 m 300 m 50 m 100 m
Alcance
Interior 150 m 150 m 10 m 200 m 150 m 50 m
Tasa
Datos 19.2 kbps 40 kbps
1.6
Mbps 10 kbps 1.6 Mbps
OTROS DATOS
Dimensio-
nes
15x13x10
cm
15x15x30
cm
10x10
x5 dm
5x3.8x1.2
cm
10x5x1.
5 cm 12x10x2 cm
30x6x8
cm
2.5x2.5x2
.5 cm
Potencia 120 mW 100 mW
Alimenta-
ción
Batería
9V
Batería
6V
Baterí
a9V Batería
Batería
9V
Batería
9V Batería
Tabla 1. Sistemas Académicos I

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
21
Casciati
(2003b,
2004)
Mastroleon
(2004)
Shinoz
uka
(2003)
chung
(2004)
Sazanov
Farrar
(2005)
Allen
(2005)
Wang (2005)
ESPECIFICACIONES DE ADQUISICIÓN DE DATOS
Canales
A/D 8 5 6 6 4
Tasa
Muestreo 480 Hz 200 kHz 100 kHz
Resolución
A/D 12 bits 16 bits 12 bits 16 bits 16 bits
ESPECIFICACIONES MICROPROCESADOR
Entradas
de datos 0 16 0
Procesador MicroChip
PIC-micro
Texas
Instrument
s
MSP430F
1611
Intel
Pentium/
Motorola
Atmel AVR
Atmega128
Tamaño
Bus 12 bits 16 bits 16 bits 16 bits 8 bits
Velocidad
Reloj
120/233
MHz 8 MHz
Memoria
Programa 16 MB 256 MB 128 kB
Memoria
Datos 128 kB
ESPECIFICACIONES WIRELESS
Radio
Aurel
XTR-
915
BlueChip
FRB915B
Chipcon
CC2420
Motorola
neuFRo
n
Maxstream
9XCite
Frecuencia 914.5
MHz 900 MHz
433
MHz 2.4 GHz 2.4 GHz 900 MHz
Estándar 802.15.1 802.11
b 802.15.4 802.15.4
Espectro
Expandido No Si Si Si Si Si
Alcance
Exterior 200-300 m 75m 9.1m 300m
Alcance
Interior 9.1m 100m
Tasa Datos 100
kbps 19.2 kbps
76.8
kbps 250 kbps
230
kbps
OTROS DATOS
Potencia 75 mW 6W

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
22
Alimenta-
ción Batería
Bate-
ría y
solar
Batería Batería
Tabla 2. Sistemas Académicos II
Realizando la necesidad de reducir costes, en 1998 Straser y Kiremidjian proponen el
diseño de un sistema de monitorización inalámbrico de bajo coste, al cual llaman
WiMMS. Para el control del nodo inalámbrico seleccionaron el procesador Motorola
68HC11 por soportar lenguajes de programación de alto nivel, como el lenguaje C. El
68HC11 es instalado en la placa NMIT-0022 y tiene unas características de 8 bit,
temporizador de 16 bits, puerto serie RS-232, y 64kB de memoria de programa. Con el
fin de integrar el firmware para el procesamiento local de datos se le dota a la placa
con 16 kB de ROM y 32 kB de RAM. Este nodo tiene un consumo de 135mA mientras
se está comunicando con otros nodos y 1mA en estado “dormido”. En cuanto a la
comunicación inalámbrica, se consiguieron alcanzar la distancia de 300m a una tasa
máxima de 19.2 kbps. Para la digitalización de las señales se emplean convertidores
analógicos sigma-delta, concretamente el 240 Hz Harris H17188IP, que tiene como
característica interesante que su tasa de muestreo fija a 240 Hz.
En 1999, Bennett propone el diseño de un sistema inalámbrico para incrustarlo en la
superficie de las carreteras. Las medidas serían tomadas por dos galgas de tensión y
dos termómetros. De ahí que el sistema fuese diseñado con una interfaz de cuatro
canales. Para el montaje de las galgas se hace uso de la arquitectura puente de
Wheatstone (pues las medidas con galgas se basan en el principio de la variación de
la resistividad de las mismas) y un posterior circuito de amplificación. El
microcontrolador del que se hace uso es el Hitachi H8/329 de 8 bits. Además se dota
al sistema de una memoria ROM externa de 23 kB para almacenar el software de la
unidad de sensado. Para la transmisión de datos se incluye un módulo Radiometrix
que transmite en la banda de los 418 MHz. En esta banda, dicho dispositivo radio es
capaz de alcanzar los 300 m de distancia en espacio abierto a una tasa de 40kbps.
Reconociendo la importancia que tendrían los sistemas de procesamiento de datos
descentralizados, Lynch (2001, 2002a y 2002b) propone un diseño que se centra en la
energía gastada en el procesamiento de datos. Para minimizar este parámetro
selecciónaron el microcontrolador Atmel AVR AT90S8518 de 8 bits mejorado RISC
(reduced instruction set computer). Este dispositivo es capaz de realizar 8 millones de
instrucciones por segundo. Además de tener un gran rendimiento en procesamiento de
datos sin tener un consumo excesivo de potencia, dispone de otros periféricos como
osciladores, temporizadores, puertos serie, etc. También dispone de 8 kB de memoria
Flash3, 512 bytes de SRAM4 y 512 bytes de EEPROM5 para el procesamiento de
3 Se trata de memorias no volátiles que permiten la lectura o escritura simultánea en varias de
sus posiciones de memoria. Son una evolución de las EEPROM
4 Son un tipo de memorias capaces de mantener la información almacenada mientras estén
alimentadas. Son de tipo aleatorio, lo que hace posible que las posiciones de memoria puedan ser leídas o escritas en cualquier orden
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
23
datos. Como convertidor analógico digital usa el Texas Instrument de 16 bits que se
caracteriza por ser un ADC de un bajo nivel de ruido y un solo canal. Al igual que en
el modelo propuesto por Straser y Kiremidjian en 1998, se hace uso del moden
inalámbrico Proxim ProxLink operando en la anda de 902-928 MHz. La diferencia con
el modelo de Straser y Kiremidjian reside en que el modelo de Lynch mejora el
consumo de potencia y en el tamaño del nodo.
Mitchell (2002), propuso un diseño de una arquitectura de dos niveles de sensores
inalámbricos. Este sistema hace hincapié en la división de la funcionalidad del sistema
de control entre los nodos inalámbricos y servidores. En este sistema los sensores
utilizaban un potente microcontralador, Cygnal 8051F006. Este microcontrolador
realiza 25 millones de instrucciones por segundo consumiendo una potencia de 50
mW. Además dispone de 2kB de RAM. La comunicación de datos ser realizaba
mediante Bluetooth, haciendo uso de un transceptor Ericsson que opera en la banda
de 2,4 GHz. Se alcanzó una distancia de unos 10m. El problema que Bluetooth
plantea es su consumo, 35mW. Una vez que los datos son recogidos por los sensores,
son transmitidos a los servidores con la tecnología anteriormente mencionada. Cada
nodo servidor tiene una radio de corto alcance (para comunicarse con los sensores
que pertenecen a la red de la cual él es el servidor/coordinador) y una de largo alcance
(para comunicarse con los demás servidores). El servidor central se diseña para
almacenar y procesar grandes cantidades de datos. Este nodo central tiene como
sistema operativo Windows. Sobre el OS se instala MATLAB6 para el procesamiento
de datos.
Kottapalli (2003) presenta una arquitectura de red inalámbrica de sensores que se
destina a superar los principales retos asociados con la sincronización de tiempo y el
consumo de energía (limitada) en los nodos inalámbricos. Kottapally, de nuevo,
presenta una arquitectura de red de dos niveles (servidores y sensores). La única
función de los sensores es recabar información del exterior para transmitirla al servidor
correspondiente. Para tal fin utilizan el transceptor radio EVK815 BlueChip a 915MHz y
codificación Manchester para los datos, a una tasa de 10 kbps. El motivo por el que
elige este modem radio es por su bajo consumo (36 mW recibiendo y 150 mW
transmitiendo). De nuevo el microcontrolador es un Atmel AVR de 8 bits y ADCs de 16
bits. El consumo de energía para cada nodo sensor es de unos 100 mW de promedio.
Esto supone un tiempo de vida autónomo de unos 18 meses. El nivel superior de la
red está formado por los servidores. Cada nodo servidor está situado en el centro de
una topología en estrella, y su función es la de recoger los datos provenientes de los
sensores. Disponen de un microcontrolador Microchip PIC de 8 bits para el control del
5 Son un tipo de memoria no volátil que puede ser programada, borrada y reprogramada
eléctricamente
6 Se trata de un software matemático creado por The MathWorks en 1984. Hace uso de un
lenguaje de programación propio, lenguaje M, disponible para Unix, Windows y Apple MAC. Entre sus prestaciones se encuentran el tratamiento de matrices, representación de datos y funciones. Además cuenta con dos herramientas que aumentan sus prestaciones, tales como Simulink (plataforma de simulación multidominio) y GUIDE (editor de interfaces de usuario). Estas prestaciones pueden aumentarse mediante toolboxes para MATLAB y blocksets para Simulink.
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
24
almacenamiento y procesamiento de datos. Para la comunicación entre nodos
servidores se instalan transceptores Proxim RangeLAN2 que opera en la banda ISM7 a
2,4GHz, que llega hasta tasas de 1,6 Mbps y alcanza hasta 300 metros en campo
abierto y unos 150 en zonas edificadas. Este transceptor consume mucha potencia
(unos 800 mW transmitiendo y recibiendo), pero se entiende que los nodos servidores
están alimentados por la red eléctrica. La idea de que las dos radios trabajen en
diferentes bandas de frecuencias es para que haya menos interferencias.
Mientras Mitchell y Kottapalli se centran en lograr un sistema de bajo consumo por la
por la energía consumida por la transmisión inalámbrica, definiendo arquitecturas de
red de dos niveles, Lynch (2003, 2004a, 2004e) se centra en el diseño de un nodo
sensorial de bajo consumo pero de alta capacidad computacional. Para ello, Lynch
propone un diseño con doble procesador. Basándose en su anterior modelo, Lynch
(2001), hace uso del procesador Atmel AVR AT 90S8515 de 8 bits para el
funcionamiento global del nodo y la adquisición de datos. Para el procesamiento de
estos datos se utiliza otro procesador más potente, el Motorola MPC 555 PowerPC de
32 bits. Este micro dispone de 448 kB de ROM (donde se pueden almacenar los
algoritmos de detección de daños) y 26 kB de RAM (para almacenar los datos
recogidos, aunque también pueden ser almacenados en la memoria externa
propuesta, 512 kB Hitachi HM628512B SRAM). Cuando los dos procesadores se
encuentran activos, el consumo es de unos 330 mW. En modo espera, ambos
consumen 12 mW. Para la transmisión de datos se selección al transceptor Proxim
RangeLAN2
Aoki y otros investigadores (2003) propusieron un nuevo prototipo de nodo, al que
llamaron Remote Intelligent Monitoring System (RIMS). Cada componente incluido en
el diseño fue elegido con el fin de reducir costes y el tamaño del prototipo, además de
un buen rendimiento. Para ello seleccionan el microcontrolador VA H8/4069. Este
diseño incluye acelerómetros piezoresistivos (MEMS) de 3 ejes (Microstone MA3-04).
Se incluye también una memoria DRAM8 de 2 MB para el almacenamiento de datos
locales, y así intentar disminuir la cantidad de información que se transmite
inalámbricamente. Para transmitir esta información se utiliza el controlador Realtek
TRL-8019AS. Se incluye en cada sensor, además un administrador HTTP para poder
interactuar remotamente con los sensores a través de Internet.
Casciati (2003b) presenta un diseño de nodos para SHM en lugares de interés
histórico en el que los sistemas SHM cableados no son adecuados. De nuevo,
propone un diseño de arquitectura de 2 niveles. Ahora hace uso, para los sensores, de
la placa ADuC812. Ésta es un sistema de adquisición de datos que incluye un núcleo
8051, con 8 kB de memoria flash, ocho canales ADC de 12 bits y un canal de DAC,
también de 12 bits. Para la transmisión y recepción inalámbrica se instala el
transceptor XTR-915 de AUREL, que opera a 914,5 MHz, que llega hasta los 100
7 Banda para canales radio definida en las recomendaciones ITU-R 5.138, 5.150 y 5.280.
8 Se trata de un tipo de memorias muy similar a las SRAM, solo que éstas necesitan recargar sus datos
periódicamente para seguir manteniéndolos en memoria

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
25
kbps. A pesar de transmitir a alta tasa, el consumo no es excesivo (como máximo 160
mW). Este modelo también incluye un filtro de paso bajo de tercer orden (ajustable)
antialiasing (el aliasing es el efecto por el que dos señales analógicas distintas son
indistinguibles después de ser digitalizadas, o visto al revés, que una señal digitalizada
no pueda reconstruir la señal analógica de la que fue digitalizada, de manera unívoca,
por no tener suficiente información de ésta).
De nuevo se introduce un segundo transceptor, en los nodos servidores, para
comunicarse con los demás servidores. En este caso se propone el transceptor
MaxStream xStream que trabaja a 2,4 GHz. Éste consume unos 750 mW
transmitiendo y 250 mW recibiendo.
En 2003, Basheer propone el diseño de un nodo inalámbrico cuyo diseño fue
optimizado para el procesamiento de datos y la colaboración entre sensores
inalámbricos. Se trata de sensores que sea capaces de auto-organizarse en una red
llamada Redundant Link Network (RLN). Estos nodos fueron llamados ISC-iBlue. Su
diseño está dividido en cuatro componentes: detección, alimentación, comunicación y
tratamiento. Para el procesamiento se hace uso del micro ARM7TDMI, ya que los
procesadores ARM (ARM es una compañía de diseño de microcontroladores) son de
bajo consumo a la vez que ofrecen un buen rendimiento, 100 MIPS. Para la
comunicación se selección el componente radio Phillips Blueberry a 2,4 GHZ. Utiliza
Bluetooth de bajo consumo y corto alcance.
Mastroleon (2004) logra un sistema con mayor eficacia, en lo que se refiere a energía
consumida partiendo del sistema de Kottapalli de 2003. El núcleo de computación que
utiliza está basado en el microcontrolador PICmicro. Éste es seleccionado por su bajo
consumo de energía a la vez de que presenta un buen rendimiento,
computacionalmente hablando. Este micro es capaz de conseguir procesamiento de
datos en tiempo real y sincronización temporal usando prioridades en sus
interrupciones multinivel. Además es capaz de cambiar dinámicamente entre seis
modos de gestión de energía para alcanzar un consumo de energía mínimo. Al igual
que Kottapalli utiliza el transceptor RFB915B BlueChip. Como convertidor analógico-
digital utiliza Maxim Max1402 de 18 bits. También incorpora un termómetro digital,
DS18S20 para poder modelar los cambios de comportamiento que tiene la estructura
debido a los cambios en temperatura.
Un paso más allá dieron Shinozuka (2003) y Chung (2004) que desarrollaron un
sistema inalámbrico llamado DuraNode. La diferencia que presenta este diseño frete a
los anteriormente expuestos es que está concebido en torno a dos tipos de
acelerómetros basados en MEMS: Analog Devices ADXL202 y Silicon SD1221. No
dan muchos más detalles de sus diseños exceptuando que incorporan una tarjeta
inalámbrica basada en el estándar 802.11b a 2,4GHz y que la alimentación se
proporciona por tecnologías de polímeros de litio. Dado que, aún así, la energía
consumida es excesiva, en comparación con la que pueden proporcionar las baterías
comentadas, se dota a los nodos DuraNode con paneles solares para recargar dichas
baterías.
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
26
En los últimos años ha emergido un nuevo estándar que está siendo la referencia para
la absoluta mayoría de las investigaciones, se trata del estándar IEEE 802.15.4,
desarrollado expresamente para redes inalámbricas. Este estándar se centra
principalmente en la eficiencia energética. Otro importante aspecto que presenta es
que ofrece una interfaz inalámbrica estándar para facilitar así la compatibilidad con
otras plataformas. Sazonov (2004) propuso el diseño de un sensor inalámbrico basado
en 802.15.4. Para las comunicaciones usó el transceptor Chipcon CC2420 que
proporciona un alcance de 10 a 75 metros en la banda de los 2,4GHz a una tasa de
hasta 250 kbps. A pesar de esto su consumo es muy bajo, unos 60mW y 52 mW
transmitiendo y recibiendo, respectivamente. Como microcontrolador hace uso del
Texas Instruments MSP430 de 16 bits que proporciona un ADC de 12 bits de 6
canales y un DAC de 12 bits con dos canales. También cuenta con una memoria de
2MB EEPROM.
Se puede apreciar que en la mayoría de los diseños anteriores, el objetivo era
minimizar el consumo de energía. Allen (2004) y Farrar (2005) proponen un sistema
con otro objetivo: proporcionar a los sensores de potencia computacional suficiente
como para poder implementar una gama de algoritmos de detección de daños. A este
sistema lo llamaron Husky.
Farrar, con colaboración con los laboratorios de Motorola, propusieron un sensor
diseñado para interactuar con Diamond II, un paquete de detección de daños existente
en lenguaje Java. Debido a esto el procesador del que se dota a los sensores es un
Pentium a 133 MHz con 256 MB de RAM y 512 MB de Flash, que hace las funciones
de disco duro. También consta de otras funcionalidades como puerto serie, Ethernet,
USB, etc. Se diseña otra placa para proporcionar a los sensores la capacidad de
comunicarse con el nodo inalámbrico a través de una interfaz. Se les dota de un
procesador Motorola DSP56858. Una vez que son tomados los datos se envía por
puerto serie a la placa principal. Este diseño tenía un inconveniente muy fuerte, su
consumo, 6W de potencia.
Wang presenta, en 2005, un diseño con nodos con capacidad multitarea. Los nodos
diseñados pueden muestrear a la vez que envían información inalámbricamente. Se le
dota a los nodos de ADC de 16 bits y cuatro canales, concretamente del convertidor
de Texas Instruments ADS8341. Este ADC se caracteriza por un bajo consumo de
energía a la vez que puede muestrear a velocidades relativamente altas, hasta 100
kHz. Como microcontrolador se selecciona de nuevo uno de Atmel, en este caso Atmel
Atmega 128. Consta de 128 kB de ROM, 4 kB de SRAM. Se le dota, además, de una
memoria SRAM externa de 128 kB (Cypress CY621128B) para almacenar los datos
medidos. Lo que más destaca de este modelo es su unidad inalámbrica, el transceptor
9XCite MaxStream. Trabaja a 900 MHz y llega hasta los 38,4 kbps y consume 250 mW
en transmisión, 150 mW en recepción y 5 mW en modo inactivo.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
27
2.1.2.2. Sistemas Comerciales.
UC
Berkeley
Crossbow
Wec
(1999)
UC
Berkeley
Crossbow
Rene
(2000)
UC Berkeley
Crossbow
MICA (2002)
UC
Berkeley
Crossbow
MICA2
(2003)
Intel
iMote
Kling
(2003)
Microstr
ain
Galbreat
h (2003)
Rckwell
Agre
(1999)
ESPECIFICACIONES DE ADQUISICIÓN DE DATOS
Canales
A/D 8 8 8 8 8 4
Tasa
Muestreo 1 kHz 1 kHz 1 kHz 1 kHz
1.7 kHz
(un
canal)
400 Hz
Resolució
n A/D 10 bits 10 bits 10 bits 10 bits 12 bits 20 bits
ESPECIFICACIONES MICROPROCESADOR
Procesad
or
Atmel
AT90LS8
535
Atmel
ATmega
163L
Atmel
ATMe
ga103
L
Atmel
Atmega128L
Zeevo
ARM7T
DMI
MicroChi
p
PIC16F8
77
Intel
StrongAR
M 1100
Tamaño
Bus 8 bits 8 bits 8 bits 8 bits 32 bits 8 bits 32 bits
Velocidad
Reloj 4 MHz 4 MHz 4 MHz 7.383 MHz 12 MHz 133 MHz
Memoria
Programa 8 kB 16 kB 128 kB 128 kB 64 kB 1 MB
Memoria
Datos 32 kB 32 kB 512 kB 512 kB 512 kB 2 MB 128 kB
ESPECIFICACIONES WIRELESS
Radio TR1000 TR1000 TR100
0 Chipcon CC1000
Wireless
BT
Zeevo
RF
Monolithi
cs
DR3000-
1
Conexant
RDSSS9
M
Frecuenci
a
868/916
MHz
868/916
MHz
868/91
6 MHz
315, 433 ó
868/916 MHz 2.4 GHz
916.5
MHZ 916 MHz
Estándar 802.15.1
Espectro
Expandid
o
No No No Si (software) Si Si
Tasa
Datos 10 kbps 10 kbps
40
kbps 38.4 kbps
600
kbps 75 kbps 100 kbps
OTROS DATOS
Dimensio
nes
2.5x2.5x
1.3 cm
7.3x7.3x
8.9 cm
Potencia 575 mAh 2850 mAh 2850
mAh 1000 mAh

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
28
Alimentaci
ón
Batería
3V
Baterí
a
3V
Batería Batería
3.6V
Batería
(9V)
Tabla 3. Sistemas comerciales
Los diseños comerciales presentan una serie de ventajas que no tiene los sistemas
académicos como la inmediata disponibilidad de los dispositivos, el apoyo técnico del
fabricante y los bajos costes de los dispositivos. Es por esto, que muchos equipos de
investigación académica usen este tipo de plataformas para sistemas de
monitorización de la salud estructural. Concretamente, la comunidad de la ingeniería
estructural ha centrado su atención en la plataforma de sensores inalámbricos “Mote”
inicialmente desarrollados conjuntamente por la Universidad de California y Berkeley y,
posteriormente, comercializados por Crossbow. Uno de los puntos fuertes de los
“Mote” es que son dispositivos abiertos y el software para sus diseños está a
disposición pública (TinyOS). Posteriormente Intel se ha unido a este tipo de
tecnologías creando sus propios diseños a los que ha llamado “iMotes”. Además hay
otras empresas que han sacado sus propios diseños, tales como Ember, MicroStrain o
Sensametrics, pero la diferencia es que estos diseños son propietarios y no de código
abierto.
El diseño Mote, ha estado en desarrollo desde finales de 1990. Su primer prototipo fue
llamado WeC, fabricado en 1999 y comercializado como Rene Mote por Crossbow.
Contaba con un microcontrolador de nuevo de Atmel de la familia AVR, concretamente
con el AT90LS8535 de 8 bits.
Incluía un ADC de 10 bits y ocho canales y velocidad de muestreo de hasta 1 kHz. En
lo que se refiere a memoria disponía de una ROM de 8 kB y 512 bytes de RAM y una
memoria adicional de 32 kB de RAM. Para establecer la comunicación inalámbrica
con otros nodos contaba con la radio RF Monolithics TR1000. Éste opera a 916 MHz,
utilizando modulación AM (modulación en amplitud) a una tasa de 10 kbps. Este
transceptor consumía tan solo 15 mW con un alcance de hasta 60 m. En 2001, el
sensor WeC fue modificado dando lugar al conocido como Rene2. El Mote Rene2 es
idéntico al WeC, salvo que el controlador ahora es un Atmel Atmega 163L, que tiene el
doble de capacidad de almacenamiento que el anterior microcontrolador, 16 kB de
ROM y 1 kB de RAM.
Glaser, en 2004, evaluó el Mote René Crossbow. Señaló algunos problemas en el
hardware, concretamente señaló problemas con la fiabilidad de los datos, al ser
transmitidos por el transceptor RF Monolithics TR1000 por un solo canal. Se
detectaron pérdidas de datos significativas. Estas pérdidas se veían incrementadas
con la presencia de equipos electrónicos, tales como cámaras, teléfonos, radios, etc.
Tanner (2002, 2003) presenta un estudio del Mote Rene2 Crossbow. En él aprueba el
funcionamiento de estos nodos. Describe su experiencia al interconectar dos
acelerómetros de tecnología MEMS al mote, concretamente el ADXL202 de Analog
Devices y el SD-1221 de Silicon. Mientras, descubre que en la interfaz de

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
29
acelerómetros del microcontrolador no se pueden tomar muestras simultáneas de dos
canales diferentes, pues se produce un desplazamiento relativo de 30 µs entre las
muestras. Este desplazamiento, como es lógico, afecta negativamente a la exactitud
de los cálculos realizados por el software del nodo, en este caso afecta a la hora de
calcular la correlación cruzada entre señales de alta frecuencia. Debido a que las
memorias no son muy grandes, los algoritmos que se utilizaron fueron los que
permitían un análisis de datos en tiempo real.
Para solucionar estos problemas y solucionar la fiabilidad del canal de comunicación
inalámbrica, Crossbow desarrolla el sensor MICA mote a principios de 2002 como la
evolución de Rene2. Incorpora como microprocesador el Atmel ATMEGA 103L que
cuenta con 128 kB de ROM y 4 kB de RAM. Como sistema operativo cuenta con
TinyOS. El transceptor utilizado es el TR1000 que sigue contando con un único canal
de comunicaciones. Este mote cuenta con 3 modos de funcionamiento para minimizar
el consumo de potencia: el modo ocioso, modo apagado y modo de bajo consumo de
energía. Gracias a esto el nodo MICA puede funcionar hasta 30 horas con dos
baterías AA.
En 2003, MICA fue modificado de nuevo, para mejorar la fiabilidad del canal de
comunicación. Se desarrolló entonces el Mote MICA2 que ofrece mayor fiabilidad. Éste
utiliza el transceptor Chipcon CC1000 que opera en la banda de los 900 MHz usando
modulación en frecuencia (FM) con gran inmunidad al ruido. La frecuencia portadora
se puede modificar en el software, lo que permite utilizar la técnica de espectro
expandido con salto en frecuencia, FHSS. Se utiliza ahora el micro Atmel
ATMEGA128L que tiene la misma capacidad de memoria que el ATMEGA103L.
Posteriormente se modificó el Mote MICA2 cambiando su transceptor por uno
compatible con el estándar IEEE 802.15.4 a 2,4 GHz, dando lugar al Mote MICAZ.
Los iMotes presentan una estructura ligeramente diferentes a los Motes. Cuentan con
el microprocesador ARM7TDMI de 32 bits que opera a 12 MHz. Este procesador
proporciona cuatro veces más de capacidad computacional que los MICA. Además
lleva una memora de 64 kB de RAM para almacenar los datos medidos y 512 kB de
ROM para ejecutar el sistema operativo TinyOS. Como transceptor, lleva integrado en
el mismo chip el Zeevo Bluetooth que trabaja a 2,4GHz. Proporciona comunicaciones
con una tasa de 720 kbps y alta fiabilidad, pues usa la técnica FHSS. Por otro lado,
cabe destacar que el control de acceso al medio Bluetooth (MAC) permite a las redes
de sensores inalámbricos iMotes ser más escalables a la vez que fiables. Spencer
(2004) señalaba la plataforma del Intel iMote como una herramienta poderosa para el
futuro de las SHM inalámbricas.
A parte de los sistemas desarrollados por las Universidades de California o Berkeley,
Crossbow e Intel, existen otras plataformas de sensores inalámbricos, como la
desarrollada por el Centro de Ciencias de Rockwell. Éstos proponen un diseño para
aplicaciones militares. La característica más importante es que se les dota de
capacidad para auto-organizarse cuando se desplieguen. El prototipo, llamado
AWAIRS, lleva el microprocesador Intel StrongARM 1110 de 32 bits que incluye 128
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
30
kB de SRAM y 1 MB de Flash. El consumo de energía de éste es de unos 200 mW en
activo y unos 0,8 mW en suspensión. Como ADC incorpora un AD7714 de 20 bits de
Analog Devices. Para la transmisión inalámbrica seleccionaron el RDSSS9M Conexant
que trabaja a 900 MHz con espectro expandido y que alcanza tasas de 100 kbps y
más de 100 m [2].
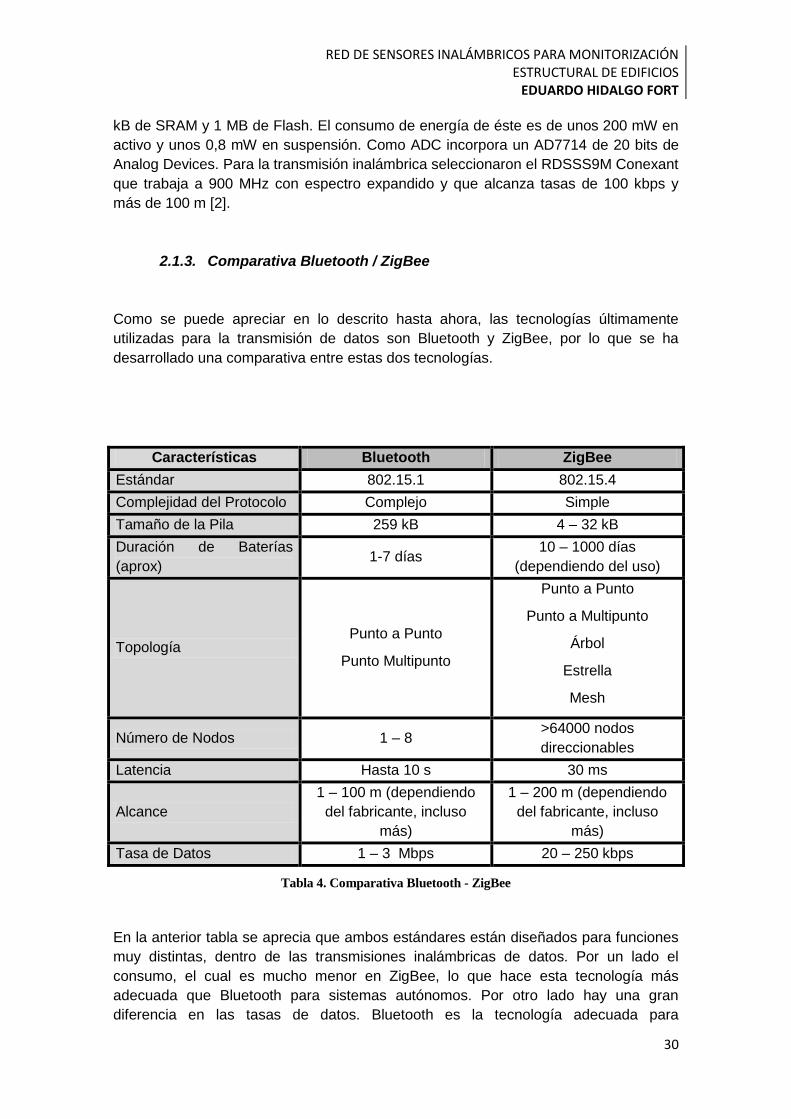
2.1.3. Comparativa Bluetooth / ZigBee
Como se puede apreciar en lo descrito hasta ahora, las tecnologías últimamente
utilizadas para la transmisión de datos son Bluetooth y ZigBee, por lo que se ha
desarrollado una comparativa entre estas dos tecnologías.
Características Bluetooth ZigBee
Estándar 802.15.1 802.15.4
Complejidad del Protocolo Complejo Simple
Tamaño de la Pila 259 kB 4 – 32 kB
Duración de Baterías
(aprox) 1-7 días
10 – 1000 días
(dependiendo del uso)
Topología Punto a Punto
Punto Multipunto
Punto a Punto
Punto a Multipunto
Árbol
Estrella
Mesh
Número de Nodos 1 – 8 >64000 nodos
direccionables
Latencia Hasta 10 s 30 ms
Alcance
1 – 100 m (dependiendo
del fabricante, incluso
más)
1 – 200 m (dependiendo
del fabricante, incluso
más)
Tasa de Datos 1 – 3 Mbps 20 – 250 kbps
Tabla 4. Comparativa Bluetooth - ZigBee
En la anterior tabla se aprecia que ambos estándares están diseñados para funciones
muy distintas, dentro de las transmisiones inalámbricas de datos. Por un lado el
consumo, el cual es mucho menor en ZigBee, lo que hace esta tecnología más
adecuada que Bluetooth para sistemas autónomos. Por otro lado hay una gran
diferencia en las tasas de datos. Bluetooth es la tecnología adecuada para

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
31
transferencias de datos a una tasa alta, como pueden ser, transferencias de ficheros,
de sonido, etc. Otro aspecto a tener en cuenta es el tipo de topología de red que
soportan ambos estándares.
2.1.4. Sistemas empotrados
El software integrado en los microprocesadores suele estar estructurado en capas
jerárquicas. En la capa más baja reside el Sistema Operativo. La función principal del
OS es ocultar detalles del hardware de los sensores inalámbricos (en este caso) a las
capas de software superiores y de formar la topología de la red de una manera eficaz.
Por encima del OS se sitúan las capas destinadas a la explotación de los sensores
inalámbricos, con funciones como la adquisición de datos, almacenamiento de los
mismos, comunicación con otros sensores y a la ejecución de los algoritmos de
detección de daños.
Uno de los sistemas operativos más utilizados es TinyOS, que fue desarrollado
conjuntamente por investigadores de la universidad de California y Berkeley en
colaboración con el Laboratorio de Investigación de Intel. Así es el OS empotrado por
defecto en los Motes de Crossbow y en los iMotes de Intel. La principal ventaja que
tiene TinyOS sobre el resto de sistemas operativos es que es de código abierto y por
tanto está a disposición pública para su libre uso y modificación. Según lo descrito por
Hill (2000), TinyOS está destinado a maximizar el potencial de los limitados recursos
disponibles en sensores inalámbricos para lograr un funcionamiento eficaz. Además
tiene la característica de que ocupa muy poco espacio (256 bytes de RAM y 4 kB de
ROM), por lo que puede ser empotrado en la mayoría de las plataformas existentes.
Por otro lado está escrito en lenguaje de programación de alto nivel, como es C,
lenguaje ampliamente extendido. Incluye servicios como la adquisición de datos a
través de sensores, varios modos de funcionamiento de bajo consumo. Se distingue
de otros OS por su apoyo a crear redes ad-hoc y transmisiones multi-hop
(retransmisión de datos por medio de sensores inalámbricos de modo que los datos
lleguen al sensor destino, aún estando fuera del alcance de su transceptor). Cuando
un sensor está listo para enviar datos, TinyOS ejecuta la función RouteSelector para
recomendar una ruta óptima.
Por otro lado, investigadores como Lynch (2004) han descrito otro tipo de Sistema
Operativo. Este OS está escrito en forma modular para encapsular la funcionalidad de
los subsistemas del sensor inalámbrico, concretamente se crean seis subdivisiones,
las cuales se programan también en lenguaje C. La primera de las subdivisiones opera
sobre el puerto serie del microcontrolador para el funcionamiento de la radio
inalámbrica. Las subdivisiones segunda y tercera utilizan el módem inalámbrico
RangeLAN2 mediante la aplicación de los protocolos de comunicación del módem. La
cuarta se centra en operar sobre el ADC. La quinta subdivisión se encarga del
almacenamiento eficiente de los datos. La última es la encargada de realizar
mediciones de los sensores digitales.
Este último OS comentado fue objeto de una actualización por parte de Wang en
2005. Este rediseño tuvo como finalidad permitir que múltiples tareas se ejecutasen al
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
32
simultáneamente. Esto permite que los sensores puedan tomar medidas y transmitir
datos a la vez, además de mejorar la sincronización de los relojes de los nodos a
través de la red.
Otro de los sistemas operativos que están emergiendo es Contiki. Es desarrollado por
un grupo de investigadores dirigidos por Adam Dunkels en el Instituto Sueco de
Ciencias de la Computación. Actualmente cuenta con dieciséis miembros del SICS,
SAP AG, Cisco, Atmel y TU Münich. Contiki es, al igual que TinyOS, de código abierto,
multitarea. Diseñado para obtener una mayor eficiencia en memoria en sistemas de
redes inalámbricas. Es un OS diseñado para microcontroladores con una capacidad
de memoria no elevada, pues requiere de 2kB de RAM y 40 kB de ROM. Proporciona
comunicaciones IP, tanto IPv4 como IPv6. Proporciona la creación de redes IP tanto
de alto como bajo consumo por transmisión inalámbrica. Para proporcionar una larga
duración de las baterías de los sensores, Contiki proporciona un mecanismo basado
en el software de perfiles de energía que realiza un seguimiento de los gastos de
energía de cada nodo sensor [3].
2.1.5. Determinación de cuatro niveles de sistemas de monitorización (de
menor a mayor complejidad) [4]:
- Detección de los daños. Nivel I. Los sistemas de este nivel sólo tienen
capacidad de detectar la presencia de algún tipo de daños en la estructura en
la que esté instalado
- Localización de los daños. Nivel II. A medida que se aumenta la densidad de
sensores en la estructura se podrá detectar la localización de los daños
- Cuantificación de los daños Nivel III. Estos sistemas son capaces de cuantificar
de algún modo los daños. Por ejemplo tiene la capacidad de (suponiendo que
el daño de una estructura ha supuesto una grieta en la misma) localizar la
grieta y además sus dimensiones
- Predicción de posibles consecuencias. Nivel IV. Los sistemas capaces de
realizar estas predicciones son muy complejos. De nuevo nos encontramos
ante unos sistemas que requieren mucha carga computacional, por tanto
mucho tiempo de funcionamiento y consecuentemente mucho consumo de
energía, por lo que se descarta. La elevada carga computacional se debe a
que, para hacer un pronóstico, hay que combinar el modelo de cargas de la
estructura con el modelo de daños que presenta la estructura. Además hay que
tener en cuenta muchos factores difíciles de medir, como la humedad en el
interior de la estructura, la corrosión, etc.
2.1.6. Tipos de seguimiento
Seguimiento continuo: En este tipo de seguimiento, los nodos están continuamente
obteniendo datos del exterior y procesándolos. Esto supone un consumo de energía
muy alto y dado que el sistema que estamos diseñando debe tener alta autonomía, en
lo que se refiere a alimentación, este tipo no es adecuado.
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
33
Seguimiento periódico: Normalmente, el seguimiento continuo sólo se aplica en
estructuras sumamente importantes, o si hay alguna duda de su integridad estructural.
Para el caso en el que la estructura esté expuesta a eventos extremos, tales como
terremotos, huracanes, o si el diseño de la estructura es tan innovador que no existe
un historial de estructuras que pueda demostrar su solvencia a largo plazo. Se basa en
que los nodos están la mayor parte del tiempo en stand-by y sólo pasan a modo activo
en ciertos momentos. Es en estos instantes cuando se recoge la información del
exterior y se analiza. Este método, por tanto, es mucho más adecuado que el anterior
para el proyecto que nos atañe. Esto hace imposible que se pueda detectar el fallo de
una estructura justo en el momento en el que se produce el daño, pero éste daño será
detectado cuando los sensores pasen a modo activo.
2.1.7. Tipos de análisis.
Las SHM se dividen en dos grandes grupos [5].
Parámetros Locales: Se basan en el estudio de componentes o partes concretas de la
estructura. Como sensores típicos para realizar este tipo de evaluación se pueden
tomar las galgas de tensión o deformación. Normalmente este tipo de análisis requiere
de tasas de muestreo relativamente altas (del orden de kHz). En este grupo es donde
entran la mayoría de los métodos NDE (Non-Destructive Evaluations) [6], que suelen
ser utilizados para localizar la parte dañada de la estructura. Por otro lado cabe
comentar que estos métodos, a menudo, son muy lentos y costosos. Los NDE son
métodos que son capaces de evaluar la estructura sin realizar tener que excitar la
estructura dañándola, como ocurre en el caso de someter una estructura a cargas muy
altas. Un ejemplo es la evaluación por ultrasonidos.
Parámetros Globales: Estas tecnologías hacen una valoración de la salud de la
estructura analizando parámetros globales de la estructura, como la frecuencia de
vibración, las formas de modo de la estructura, la temperatura de la misma, etc. Este
es tipo de análisis es muy útil, ya que existen multitud de algoritmos que se basan en
principios físicos como la aceleración para evaluar la salud de la estructura. El tipo de
sensor que normalmente se usa para este tipo de análisis es el acelerómetro. La
evaluación de la salud estructural mediante este tipo de parámetros, no requiere una
tasa de muestreo tan alta como en el caso de la evaluación mediante parámetros
locales. Procedimientos para la detección de daños típicos en este tipo de análisis son
la detección por cambios en la frecuencia de resonancia, en las formas de modo, etc.
[4] - [6]
2.1.8. Estudio de las Tecnologías SHM a través de ejemplos
representativos.
En éste epígrafe se da una visión general de algunos de los sistemas que se han
instalado en construcciones físicas y además se muestran algunos resultados
obtenidos.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
34
- Sistema de monitorización propuesto en 2002 por Lynch, Law, Kiremidjian,
Kenny y Carryer [7].
Este modelo nos presenta como novedad a los sistemas anteriores la inclusión
de un módulo inalámbrico. Permite una arquitectura de red en modo peer-to-
peer, centralizado o una arquitectura hibrida combinando las dos. Otra novedad
que presenta es que no se requiere un nodo central donde realizar todo el
proceso computacional de la información, si no que los nodos están dotados de
un microprocesador (aunque el nodo central seguirá realizando mas
procesamiento de datos que los sensores). El tipo de sensores que, en este
caso, se utilizan son acelerómetros. Como dispositivo inalámbrico utiliza un
modem ProxLink. Alcance de unos 30 metros en construcciones.
Figura 4. Izquierda: sistema inalámbrico. Derecha: sistema cableado
Figura 5. Sistema instalado

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
35
A continuación se muestra la entrada a la estructura (la excitación) y las
medidas obtenidas.
Figura 6. Entrada al sistema
Figura 7. Respuesta de los acelerómetros
Figura 8. Espectro en frecuencia de la respuesta de la estructura
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
36
En el espectro se puede apreciar con claridad 2 frecuencias de resonancia en
1.86 Hz y a 5.10 Hz. Para validar estos resultados se utiliza DIAMOND
(herramienta desarrollada por los Laboratorios de Los Álamos). Los modos
detectados usando este software fueron 1.95 y 5.05 Hz.
- Sistema validado en Alamosa Canyon Bridge en 2003 [8].
El diseño que aquí se propone se realiza con el fin de de mejorar la distancia
de los enlaces radio y el coste de los nodos. Consta de ADCs de 16 bits, que
proporcionan un rango dinámico de hasta 67 dB, dos procesadores: un Atmel
de 8 bits y un Motorola MPC555, que se activará, solo cuando sea necesario,
para la ejecución de los algoritmos que requieran una alta capacidad
computacional y un modem radio Proxim RangeLAN2 que cubre una distancia
de 130m. El sistema es comparado con un sistema cableado instalado
paralelamente en la estructura obteniéndose resultados muy parecidos.
Figura 9. Puente Cañón de Alamosa
Figura 10. Respuesta del sistema; cableado (arriba), inalámbrico (debajo)

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
37
Figura 11. Funciones de respuesta en frecuencia del sistema cableado e inalámbrico
- Sistema propuesto por Kurata, Spencer Jr y Ruiz-Sandoval en 2005 [9].
Este proyecto va más allá y se propone determinar los límites de las
plataformas de sensores autónomos. Para ello se basa en los nodos MICA y
MICA2 desarrollados conjuntamente por investigadores de las Universidades
de California y Berkeley. Se trata de software y hardware libre. Como Sistema
Operativo usan TinyOS, también de código abierto. Este OS cuenta con
mensajería radio, autoconfiguración de redes, multi-hopping y modo de bajo
consumo, entre otras características. Los nodos se comunican
inalámbricamente MICA y MICA2 con una estación base. Se utiliza la placa
MTS310, a la que se le conectan los nodos MICA o MICA2. En el caso de
MICA2 se simula la acción de un terremoto. En ambos casos la información
recibida es correcta.
Figura 12. Segundo piso:(a) Sistema cableado y (b) sistema con MICA2. Base: (c) aceleración
por sistema cableado y (d) aceleración por sistema con MICA2

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
38
- Sistema validado en Geumdang Bridge en Corea en 2006 [10]. En este estudio
se pretende medir la precisión de un sistema SHM de bajo costo difíciles
condiciones ambientales. Para ello se instalan en el puente Geumdang de
Korea. Los resultados obtenidos por el sistema inalámbrico instalado (de 14
nodos) se comparan don los obtenidos por un sistema cableado y testeado. El
puente se somete a las vibraciones forzadas producidas por el paso de
camiones a través de él. El comportamiento se analiza a través de parámetros
modales, haciendo uso de la FFT. Se realizan dos tipos de pruebas: con y sin
acondicionador de señal externo al nodo para eliminar algunas fuentes de ruido
(el nivel de ruido baja de 2.2 a 0.13mg). El resultado fue la validación de un
sistema de alta precisión inalámbrico.
Figura 13.Puente Geumdang (a y b) y configuraciones 1 (c) y 2 (d)
El sistema se instala en varias configuraciones para ver el efecto que se
produce al tener diferentes topologías de red y la importancia de
seleccionar los puntos de medida adecuados
Figura 14. Repuesta de los sensores en varias configuraciones
- Golden Gate Bridge en San Francisco en el año 2007 [11].
El sistema se instala sobre dicho puente de 1.2 km de longitud. De nuevo los
nodos implicados están formados por acelerómetros (uno de alta y otro de
menor precisión), filtros antialiasing, ADCs de 16 bits y el nodo MICAZ para el

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
39
control y las comunicaciones. El sistema instalado consta de 64 nodos
sincronizados con hasta 46 hops. Se consiguen menos de 10us de jitter, una
precisión de 30µg y consiguiendo una tasa binaria de 441bps.
Figura 15. Nodo, antena y batería instalada en el centro de la construcción
.
Figura 16. Resultados obtenidos de Simulación mediante Elementos Finitos, Abdel Ghaffar
(otro método validado) y en este estudio
2.2. ALGORITMOS PARA LA IDENTIFICACIÓN DE
RIESGOS EN ESTRUCTURAS
Son muchas las posibilidades que existen en lo que se refiere a algoritmos. A
continuación se enumeran y explican brevemente [1] y [12].
- Frecuencia de Resonancia. Según las referencias indicadas, cambios en la
rigidez de la estructura implica cambios en las propiedades modales de esta y
por tanto en su frecuencia fundamental.
Pero éste método presenta muchas limitaciones. Para poder detectar daños
por cambios en las frecuencias fundamentales es necesario realizar medidas
muy precisas o bien que los daños sean graves. Por ejemplo Farrar (1994)
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
40
realizó pruebas en la autopista interestatal 40 de EE.UU. Se redujo la rigidez de
la sección transversal de la autopista el 96,4%, reduciendo la rigidez de flexión
en un 21%. No se obtuvieron cambios significativos en las frecuencias
fundamentales.
La frecuencia natural es un parámetro global de la estructura, por lo que el
sistema de monitorización no podrá ser de un nivel superior a 1.
- Formas de Modo. Consiste en realizar correlaciones entre las formas de modo
que tenía la estructura en cuestión recién construida (se entiende en estado
saludable) y las formas de modo que se van obteniendo en sucesivos instantes
de muestreo. Una variante simplificada de éste método es comparar los picos
de amplitud de cada modo con los que tenía cuando en el momento de
construcción de la estructura. Cabe comentar que, mientas más alto es el
número de modos, más fácil es detectar y localizar daños.
- Curvaturas en Formas de Modo. Pandey (1990) demostró que cambios en la
curvatura de las formas de modo puede ser un buen indicador de la existencia
de daños.
En el caso de vigas, existe cierta relación entre la curvatura de las formas de
modo y la rigidez de flexión de la misma (la rigidez de flexión es igual al
momento flector dividido por la curvatura correspondiente, que es la segunda
derivada de la deformación de flexión). Chance (1994) encontró errores en el
cálculo matemático de las formas de modo, por lo que propuso realizar
medidas de la tensión en lugar de medir la curvatura directamente. Los
resultados mejoraron enormemente.
- Modal Strain Energy. Este método es propuesto por Zhang, Qiong y Link
(1998). Utiliza medidas de las formas de modo y de las frecuencias
fundamentales de la estructura, tanto dañada como no dañada y un modelo de
elementos finitos de la misma para localizar los daños.
- Amortiguamiento. El método de amortiguamiento puede ser más adecuado
según los tipos de daños que se produzcan. Cuando se producen cambios no
lineales en la estructura (como grietas), este método es más eficaz que la
detección por frecuencias fundamentales o formas de modo. Modena, Sonda y
Zonta (1999) demuestran que grietas visualmente no detectables pueden
producir pequeños cambios en las frecuencias fundamentales mientras que el
amortiguamiento sufre grandes cambios.
- Vector de Ritz. Es una alternativa a las formas de modo. Sin embargo presenta
muchos problemas por la complejidad que supone la extracción de los vectores
de Ritz de las medidas de vibración.
- AR-ARX. Sohn y Farrar (2001) [13] aplican técnicas de control de procesos
estadísticos a diagnostico de daños mediante vibración. Primero se construye
un modelo autorregresivo (AR) y posteriormente uno con entradas exógenas
(ARX). ARX se usa para extraer del modelo parámetros modales como las
condiciones ambientales. Este método se explica con más detalle en el
epígrafe 4.1.1.2.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
41
- Existen otros métodos como Flexibilidad Dinámica, Antiresonancia, Análisis
Canónico, Análisis Tiempo-Frecuencia, Descomposición de Modo Empírica,
Transformada de Hilbert, etc.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
42
CAPÍTULO 3
Visión general del Estándar
IEEE 802.15.4
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
43
3. VISIÓN GENERAL DEL ESTÁNDAR
802.15.4
Este estándar define el protocolo y la interconexión de dispositivos vía radio en una
red de área personal (PAN) con acceso múltiple al medio sin colisión (CSMA-CA).
Soporta topología punto a punto y estrella.
Para poder entender el resto del epígrafe se hace necesario anotar una serie de
definiciones y aclaraciones:
- Alternate personal area network (PAN) coordinator: Un coordinador que es
capaz de reemplazar al coordinador PAN cuando este se cae de la red.
- Beacon-enabled personal area network: Un PAN en la cual todos los
coordinadores emiten balizas (beacon)
- Contention Access period (CAP): Es el periodo inmediatamente después a la
llegada de la trama baliza (beacon) durante el cual los dispositivos que deseen
transmitir competirán por el acceso al canal usando CSMA-CA
- Contention Access period (CAP) symbol: Un símbolo que “ocurre” durante el
periodo CAP
- Coordinador: Es un full-function device (FFD) capaz de retransmitir mensajes.
Si el coordinador es el controlador principal de la PAN, se denomina PAN
coordinator.
- Dispositivo: Dos tipos: Full-function device (FFD) y reduced-function
device(RFD).
- FFD: Dispositivo capaz de operar como un coordinador.
- Idle period: duración del tiempo donde no hay programada ninguna acción
para los tranceptores
- Self-healing: Es la capacidad de la red para detectar y recuperarse de los
fallos que aparecen tanto en los nodos de la red o en los enlaces de
comunicación, sin intervención humana.
- Self-organizing: Es la capacidad de la red de detectar la presencia de otros
nodos y organizarlos en la estructura de la red sin intervención humana.
- Un FFD puede operar en 3 modos: como PAN coordinador, como coordinador
o como dispositivo de funciones reducidas (RFD).
- Un FFD puede hablar con RFDs u otros FFD, mientras que un RFD puede
hablar solo con un FFD. Un RFD está destinado a aplicaciones
extremadamente simples, tales como sensor pasivo de infrarrojos. No tienen
necesidad de enviar grandes cantidades de datos y solo pueden asociarse con
un FFD en un instante de tiempo (no deben asociarse a varios FFD
simultáneamente).
El estándar cuenta con cuatro capas físicas definidas:
- 868/915 MHz Espectro expandido por secuencia directa (DSSS) empleando
modulación por cambios de fase binarios por desplazamiento (BPSK)
- 868/915 MHz DSSS empleando modulación O-QPSK

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
44
- 868/915 MHz espectro expandido por secuencia en paralelo empleando BPSK
y modulación por desplazamiento en amplitud (ASK)
- 2450 MHz DSSS empleando O-QPSK
Las frecuencias, las modulaciones y las tasas binarias que se soportan son las que se
muestran en la siguiente tabla:
Capa Física Frecuencia Modulación Tasa de bits
868/915 868-868.6 BPSK 20
902-928 BPSK 40
868/915 (opcional) 868-868.6 ASK 250
902-928 ASK 250
868/915 (opcional) 868-868.6 O-QPSK 100
902-928 O-QPSK 250
2450 2400-2483.5 O-QPSK 250
Tabla 5. Capa física IEEE 802.15.4
Un FFD puede operar en 3 modos: como PAN coordinador, como coordinador o como
dispositivo de funciones reducidas (RFD).
Un FFD puede hablar con RFDs u otros FFD, mientras que un RFD puede hablar solo
con un FFD. Un RFD está destinado a aplicaciones extremadamente simples, tales
como sensor pasivo de infrarrojos. No tienen necesidad de enviar grandes cantidades
de datos y solo pueden asociarse con un FFD en un instante de tiempo (no deben
asociarse a varios FFD simultáneamente).
3.1. TOPOLOGÍAS DE RED
Estrella ó Peer-to-Peer
Figura 17. Topologías de red 802.15.4
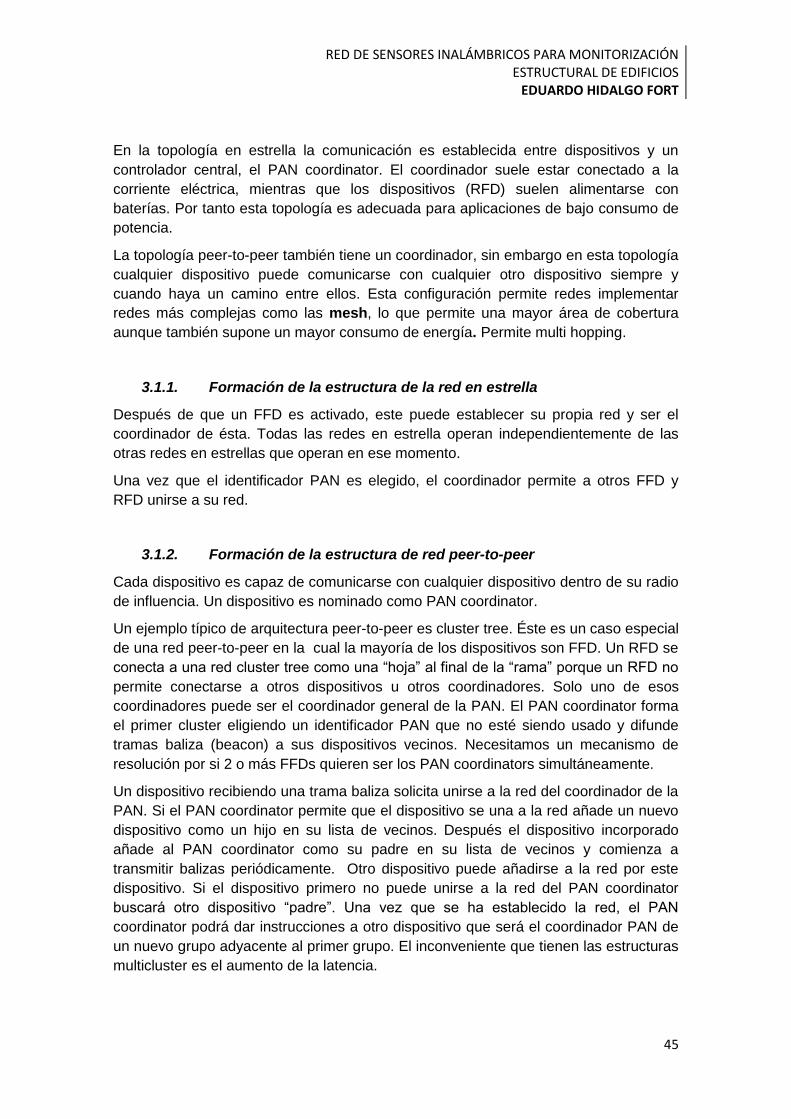
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
45
En la topología en estrella la comunicación es establecida entre dispositivos y un
controlador central, el PAN coordinator. El coordinador suele estar conectado a la
corriente eléctrica, mientras que los dispositivos (RFD) suelen alimentarse con
baterías. Por tanto esta topología es adecuada para aplicaciones de bajo consumo de
potencia.
La topología peer-to-peer también tiene un coordinador, sin embargo en esta topología
cualquier dispositivo puede comunicarse con cualquier otro dispositivo siempre y
cuando haya un camino entre ellos. Esta configuración permite redes implementar
redes más complejas como las mesh, lo que permite una mayor área de cobertura
aunque también supone un mayor consumo de energía. Permite multi hopping.
3.1.1. Formación de la estructura de la red en estrella
Después de que un FFD es activado, este puede establecer su propia red y ser el
coordinador de ésta. Todas las redes en estrella operan independientemente de las
otras redes en estrellas que operan en ese momento.
Una vez que el identificador PAN es elegido, el coordinador permite a otros FFD y
RFD unirse a su red.
3.1.2. Formación de la estructura de red peer-to-peer
Cada dispositivo es capaz de comunicarse con cualquier dispositivo dentro de su radio
de influencia. Un dispositivo es nominado como PAN coordinator.
Un ejemplo típico de arquitectura peer-to-peer es cluster tree. Éste es un caso especial
de una red peer-to-peer en la cual la mayoría de los dispositivos son FFD. Un RFD se
conecta a una red cluster tree como una “hoja” al final de la “rama” porque un RFD no
permite conectarse a otros dispositivos u otros coordinadores. Solo uno de esos
coordinadores puede ser el coordinador general de la PAN. El PAN coordinator forma
el primer cluster eligiendo un identificador PAN que no esté siendo usado y difunde
tramas baliza (beacon) a sus dispositivos vecinos. Necesitamos un mecanismo de
resolución por si 2 o más FFDs quieren ser los PAN coordinators simultáneamente.
Un dispositivo recibiendo una trama baliza solicita unirse a la red del coordinador de la
PAN. Si el PAN coordinator permite que el dispositivo se una a la red añade un nuevo
dispositivo como un hijo en su lista de vecinos. Después el dispositivo incorporado
añade al PAN coordinator como su padre en su lista de vecinos y comienza a
transmitir balizas periódicamente. Otro dispositivo puede añadirse a la red por este
dispositivo. Si el dispositivo primero no puede unirse a la red del PAN coordinator
buscará otro dispositivo “padre”. Una vez que se ha establecido la red, el PAN
coordinator podrá dar instrucciones a otro dispositivo que será el coordinador PAN de
un nuevo grupo adyacente al primer grupo. El inconveniente que tienen las estructuras
multicluster es el aumento de la latencia.
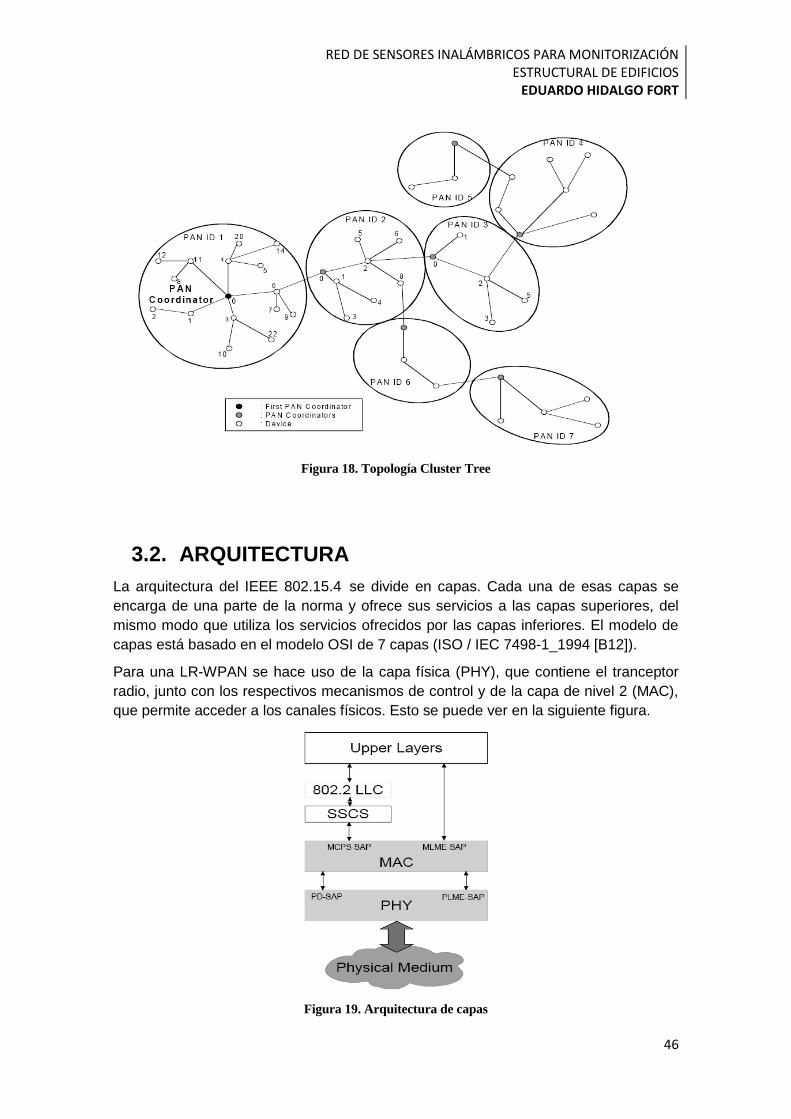
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
46
Figura 18. Topología Cluster Tree
3.2. ARQUITECTURA
La arquitectura del IEEE 802.15.4 se divide en capas. Cada una de esas capas se
encarga de una parte de la norma y ofrece sus servicios a las capas superiores, del
mismo modo que utiliza los servicios ofrecidos por las capas inferiores. El modelo de
capas está basado en el modelo OSI de 7 capas (ISO / IEC 7498-1_1994 [B12]).
Para una LR-WPAN se hace uso de la capa física (PHY), que contiene el tranceptor
radio, junto con los respectivos mecanismos de control y de la capa de nivel 2 (MAC),
que permite acceder a los canales físicos. Esto se puede ver en la siguiente figura.
Figura 19. Arquitectura de capas
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
47
Las capas superiores son las encargadas de proporcionar la configuración de la red, la
manipulación y los mensajes de rutado, además de una capa de aplicación, la cual
designe la función del dispositivo.
3.2.1. Capa física
La capa física proporciona 2 servicios: servicio de datos y servicio de gestión de la
interfaz física a la capa de gestión (PLME), a su punto de acceso al servicio (SAP)
(conocido como PLME-SAP). El servicio de datos permite la transmisión y recepción
de unidades de protocolo de datos PHY (PPDUs) a través del canal radio.
Las características de la capa física son:
- Activación y desactivación del transceptor radio.
- ED (energy detection)
- LQI (link quality indication)
- Selección de canal
- Clear cannel assessment (CCA)
3.2.2. Capa MAC
Proporciona 2 servicios: servicio de datos y servicio de gestión de la interfaz entre la
subcapa mac y la subcapa de gestión de la entidad (MLME) con su SAP (conocido
como MLME-SAP). El servicio de datos habilita tanto la transmisión como la recepción
MPDUs a través del servicio de datos de la capa física.
Las características de la subcapa MAC son:
- Gestión de la baliza
- Acceso al canal
- GTS (guaranteed time slot) management
- Validación de trama
- Asentimiento de entrega de trama
- Asociación y disociación
- También aporta la base para implementar mecanismos de seguridad.
3.3. VISTA GENERAL DEL FUNCIONAMIENTO
3.3.1. Estructura Supertrama
Este estándar permite usar supertrama opcionalmente. El formato de la supertrama es
definido por el coordinador. Esta supertrama es delimitada por las balizas enviadas por
el coordinador y es dividida en 16 slots del mismo tamaño. Opcionalmente, la
supertrama puede tener un tiempo activo e inactivo. Durante el tiempo de inactividad el
coordinador entrará en el modo de bajo consumo. La baliza es transmitida en el primer
slot de la supertrama. Si un coordinador no desea usar supertrama, dejará de
transmitir balizas. Las balizas se utilizan para sincronizar los dispositivos conectados,
para identificar la PAN y para descubrir la estructura de la supertrama. Cualquier
dispositivo que desee comunicarse durante el periodo CAP entre 2 balizas compite
con otros dispositivos con CSMA-CA.
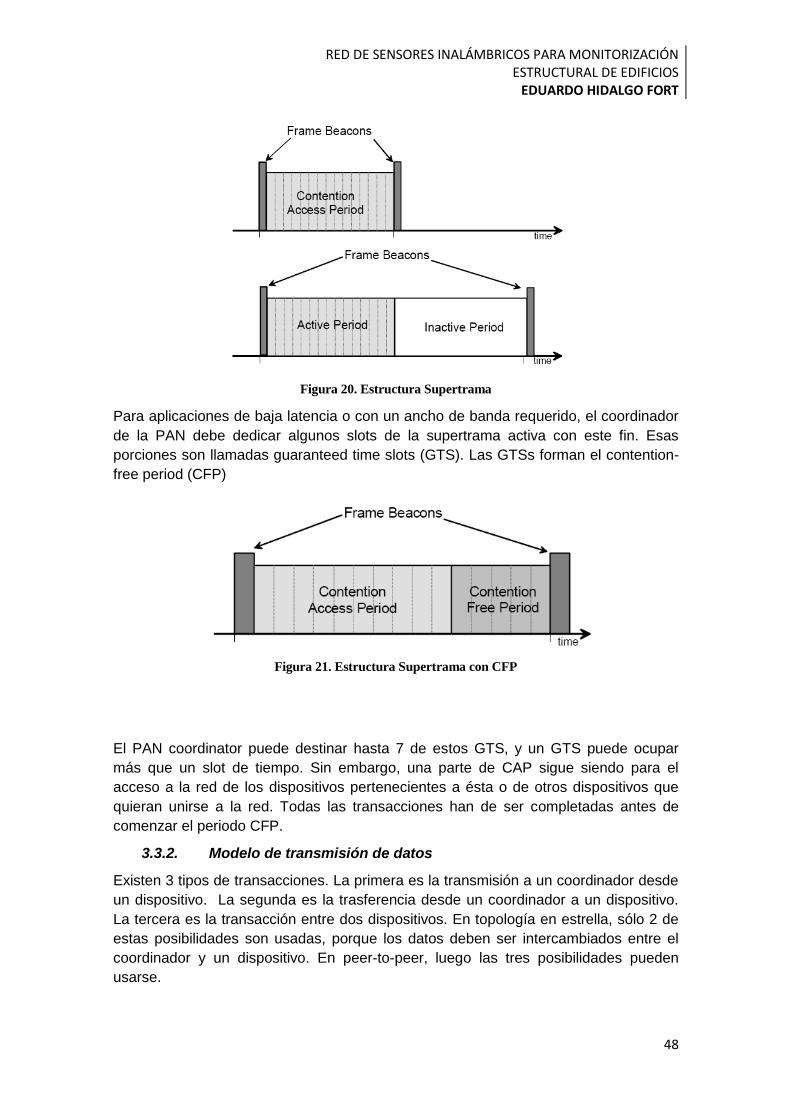
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
48
Figura 20. Estructura Supertrama
Para aplicaciones de baja latencia o con un ancho de banda requerido, el coordinador
de la PAN debe dedicar algunos slots de la supertrama activa con este fin. Esas
porciones son llamadas guaranteed time slots (GTS). Las GTSs forman el contention-
free period (CFP)
Figura 21. Estructura Supertrama con CFP
El PAN coordinator puede destinar hasta 7 de estos GTS, y un GTS puede ocupar
más que un slot de tiempo. Sin embargo, una parte de CAP sigue siendo para el
acceso a la red de los dispositivos pertenecientes a ésta o de otros dispositivos que
quieran unirse a la red. Todas las transacciones han de ser completadas antes de
comenzar el periodo CFP.
3.3.2. Modelo de transmisión de datos
Existen 3 tipos de transacciones. La primera es la transmisión a un coordinador desde
un dispositivo. La segunda es la trasferencia desde un coordinador a un dispositivo.
La tercera es la transacción entre dos dispositivos. En topología en estrella, sólo 2 de
estas posibilidades son usadas, porque los datos deben ser intercambiados entre el
coordinador y un dispositivo. En peer-to-peer, luego las tres posibilidades pueden
usarse.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
49
Una PAN con baliza habilitada se usa en redes que en las que cualquiera requiera
sincronización o soporte para dispositivos de baja latencia. Si la red no necesita
sincronización o soporte para dispositivos de baja latencia (tales como PCs), puede no
usar baliza para una transferencia normal. Sin embargo, la baliza es necesaria para
formar la red.
3.3.2.1. Transmisión de datos a un coordinador
Cuando un dispositivo desea comunicarse con un coordinador en una PAN con baliza
habilitada, primero ha de escuchar la baliza que el coordinador envía periódicamente.
Cuando escucha esta baliza el dispositivo se sincroniza con la supertrama y, en el
momento adecuado, transmite los datos, usando CSMA-CA o ALOHA ranurado. El
coordinador posteriormente le asiente la recepción correcta de los datos
transmitiéndole un asentimiento opcional.
Figura 22. Comunicación con un coordinador en una PAN con balizas
Cuando un dispositivo desea enviar información en una PAN que no tiene la baliza
habilitada, simplemente transmite sus datos, usando unslotted CSMA-CA. El
coordinador le asiente la correcta recepción de los datos con un ack opcional.
Figura 23. Comunicación con un coordinador en una PAN sin balizas
3.3.2.2. Transmisión de datos desde un coordinador
Cuando un coordinador desea enviar datos a un dispositivo en una PAN con baliza
habilitada, indica en la baliza que va a enviar un mensaje. El dispositivo escucha
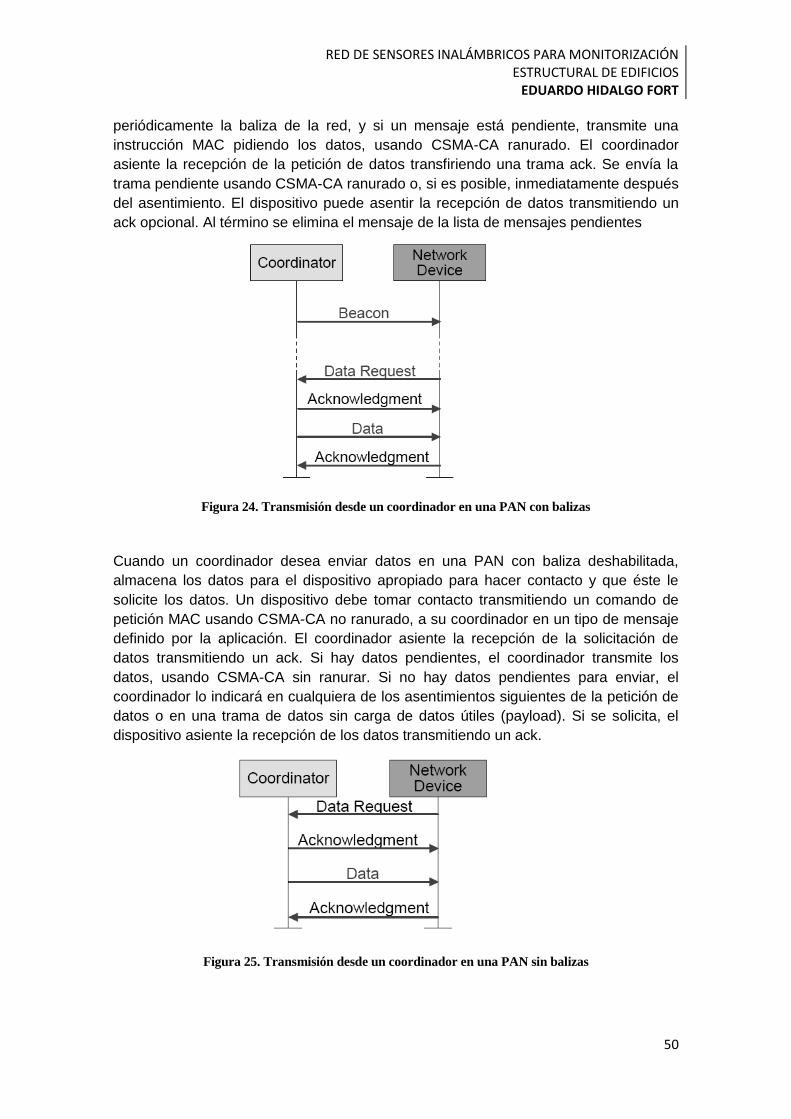
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
50
periódicamente la baliza de la red, y si un mensaje está pendiente, transmite una
instrucción MAC pidiendo los datos, usando CSMA-CA ranurado. El coordinador
asiente la recepción de la petición de datos transfiriendo una trama ack. Se envía la
trama pendiente usando CSMA-CA ranurado o, si es posible, inmediatamente después
del asentimiento. El dispositivo puede asentir la recepción de datos transmitiendo un
ack opcional. Al término se elimina el mensaje de la lista de mensajes pendientes
Figura 24. Transmisión desde un coordinador en una PAN con balizas
Cuando un coordinador desea enviar datos en una PAN con baliza deshabilitada,
almacena los datos para el dispositivo apropiado para hacer contacto y que éste le
solicite los datos. Un dispositivo debe tomar contacto transmitiendo un comando de
petición MAC usando CSMA-CA no ranurado, a su coordinador en un tipo de mensaje
definido por la aplicación. El coordinador asiente la recepción de la solicitación de
datos transmitiendo un ack. Si hay datos pendientes, el coordinador transmite los
datos, usando CSMA-CA sin ranurar. Si no hay datos pendientes para enviar, el
coordinador lo indicará en cualquiera de los asentimientos siguientes de la petición de
datos o en una trama de datos sin carga de datos útiles (payload). Si se solicita, el
dispositivo asiente la recepción de los datos transmitiendo un ack.
Figura 25. Transmisión desde un coordinador en una PAN sin balizas
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
51
3.3.2.3. Envío de datos entre dispositivos (peer-to-peer)
Todos los dispositivos deben comunicarse con los demás en su radio de influencia.
Con el fin de hacerlo de manera eficaz, los dispositivos que deseen comunicarse
necesitan recibir constantemente o sincronizarse con los demás.
3.3.3. Sincronización
En PANs que soportan balizas la sincronización es realizada recibiendo y
decodificando las tramas de las balizas. En las que no soportan balizas, la
sincronización es realizada por elección del coordinador.
3.3.3.1. Sincronización con balizas
En este tipo de redes (PANs con balizas habilitadas, macBeaconOrder < 15), todos los
dispositivos deben ser capaces de adquirir sincronización con el fin de detectar
cualquier mensaje pendiente o para seguir la baliza. Los dispositivos deben permitir la
sincronización por balizas sólo con las balizas que contengan el identificador de la
PAN (especificado en macPANId). Si el identificador que aparece es el de difusión
(0xffff) el dispositivo no intentara adquirir la sincronización por baliza.
Si un dispositivo se ha instruido para obtener la sincronización a través de balizas
(mediante la primitiva MLME-SYNC.request), el dispositivo deberá tratar de obtener la
baliza y el seguimiento de la misma mediante la activación periódica y oportuna de su
receptor. Si el seguimiento no se ha especificado, el dispositivo podrá optar por tratar
de obtener la baliza una sola vez o terminar el seguimiento después de la siguiente
baliza, si el seguimiento fue posible gracias a una petición anterior.
Para adquirir la sincronización por baliza, un dispositivo debe habilitar su receptor y
buscar como mucho durante [aBaseSuperframeDuration * (2n + 1)] símbolos, donde n
es macBeaconOrder. Si no se recibe ninguna trama de baliza con el identificador PAN
al que está asociado, el MLME repetirá la búsqueda. Si el número de búsquedas llega
a aaMaxLostBeacons, el MLME debe notificar a su capa superior usando la primitiva
correspondiente.
Si la sincronización por baliza está activada, el MLME activará su receptor antes de la
siguiente transmisión esperada, es decir justo antes del inicio de la siguiente
supertrama. Si el número de balizas consecutivas perdidas por el MLME alcanza el
valor aMaxLostBeacons, el MLME deberá responder con la primitiva MLME-sync-
Loss.indicacion a su capa superior.
3.3.3.2. Sincronización sin balizas
Todos los dispositivos operando con las balizas desactivadas tienen que ser capaz de
elegir un coordinador para los datos en la siguiente capa.
Un dispositivo es instruido para elegir el coordinador cuando el MLME recibe la
primitiva MLME-POLL.request. En la recepción de esa primitiva, el MLME debe buscar
el procedimiento para extraer los datos pendientes del coordinador.
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
52
3.3.4. Coordinación de transacción
Debido a que esta norma intenta reducir el consumo, los dispositivos estarán
alimentados por baterías. Dicho esto, cabe pensar que es lógico que las transacciones
estén promovidas por los dispositivos y no por los coordinadores, es decir, cualquier
coordinador debe indicar en su baliza cuándo hay mensajes pendientes para
dispositivos o los propios dispositivos necesitan elegir el coordinador para determinar
si ellos tienen mensajes pendientes. Estas transmisiones se llaman transacciones
indirectas
El coordinador tiene que comenzar la gestión de una transacción en la recepción de
una solicitud de transmisión indirecta, ya sea a través de la primitiva MCPS-
DATA.request o a través de una solicitud de la MLME para enviar un comando MAC
promovida por una primitiva de la capa superior, como la MLME –
ASSOCIATE.response. Al término de la transacción, el subnivel MAC deberá indicar
un valor de estado de la capa superior siguiente. Si una primitiva de solicitud es
instigada para la transmisión indirecta, la primitiva correspondiente a la confirmación
debe ser usada para transmitir el valor de estado apropiado. Por el contrario, si una
primitiva de respuesta pide la transmisión indirecta, para transmitir el valor de estado
apropiado se utiliza MLME-COOM-STATus.indication.
En una PAN con balizas habilitadas, un dispositivo que recibe una baliza conteniendo
su dirección en la lista de direcciones pendientes tiene que intentar extraer los datos
del coordinador. En una PAN con las balizas deshabilitadas, un dispositivo tiene que
intentar extraer los datos del coordinador en la recepción de la primitiva MLME-
POLL.request. Si el dispositivo recibe una señal con el subcampo Frame Pending a
uno, deberá dejar su receptor activado hasta macMaxFrameTotalWaitTime símbolos
para recibir la trama de difusión de datos del coordinador.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
53

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
54
CAPÍTULO 4
Modelado de una
Estructura

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
55
4. MODELADO DE UNA ESTRUCTURA
En el presente epígrafe se realiza un estudio sobre las estructuras en las cuales se
debería instalar el sistema. El objetivo principal de éste epígrafe es determinar el
comportamiento (al menos en lo que se refiere a periodos o frecuencias
fundamentales) de un edificio.
Para corroborar los datos obtenidos del modelado y el correcto funcionamiento del
sistema, la instalación del sistema a desarrollar se debería realizar en dos tipos de
estructuras:
- Instalación del sistema de monitorización de salud estructural en un modelo a
escala que emule el comportamiento de un edificio real con el fin de evitar la
dificultad que supone trabajar en un edificio de grandes dimensiones en
comparación con un modelo a escala.
- Instalación del sistema en un edificio real con el fin de corroborar los
resultados obtenidos en el modelo a escala y, por supuesto, para que
desempeñe la función para la que es desarrollado: Monitorizar la Salud
Estructural.
4.1. MODELADO DE UNA ESTRUCTURA
Para el modelado de la estructura se ha usado principalmente la norma publicada en
el número 244 del BOE [14]. Éste documento nos proporciona los criterios para la
determinación de:
- Las masas del edificio a considerar en el cálculo
- Los periodos y modos de vibración de la estructura
- La respuesta de la estructura ante las acciones sísmicas resultantes de la
aplicación del capítulo 2 de dicha norma
- La verificación de la seguridad de la estructura.
Para el caso que nos atañe, principalmente nos centraremos en lo que tiene que ver
con el análisis en frecuencia de la estructura (además de la detección por cambios en
frecuencia y formas de modo también se evaluará la salud de la estructura mediante
coeficientes autorregresivos, que se explicará más adelante), pues el fin de este
documento no es el diseño de la estructura en sí, sino obtener un modelo del tipo de
estructura real (nosotros estudiaremos el caso de edificios que han de cumplir ciertas
características que se explicarán más adelante) que emule su comportamiento, para
así poder testear el sistema que se pretende diseñar.
4.1.1. Métodos de cálculo simplificados para los casos más usuales de
edificación
La norma usada para determinar el comportamiento de la estructura establece el
análisis de la estructura mediante espectros de respuesta como método de referencia,
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
56
aunque también permite el estudio dinámico por integración de registros de
aceleración.
Nos interesa un modelo simplificado que, a continuación, se expone. Este método solo
se podrá usar en edificios que cumplan las siguientes especificaciones:
- El número de plantas es inferior a veinte
- La altura del edificio sobre rasante es inferior a sesenta metros
- Existe regularidad geométrica en planta y en alzado, sin entrantes ni salientes
importantes
- Dispone de soportes continuos hasta cimentación, uniformemente distribuidos
en planta y sin cambios bruscos en su rigidez
- Dispone de regularidad mecánica en la distribución de rigideces, resistencias
y masas, de modo que los centros de gravedad y de torsión de todas las
plantas estén situados, aproximadamente, en la misma vertical
- La excentricidad del centro de las masas que intervienen en el cálculo sísmico
respecto al de torsión es inferior al 10% de la dimensión en planta del edificio
en cada una de las direcciones principales.
4.1.1.1. Modelo de la estructura
Este método se puede aplicar a modelos de estructuras que cumplan los requisitos
expuestos en el apartado 4.1.1. De este modo se podrán asimilar éstas construcciones
a un modelo unidimensional constituido por un oscilador múltiple con un solo grado de
libertad de desplazamiento por planta. Su análisis se realiza, en el caso simplificado, a
partir de un sistema de fuerzas horizontales que equivalen a las de los terremotos. (Se
desprecian las fuerzas verticales, aunque en casos de eventos sísmicos muy fuertes
pueden ser bastante importantes).
4.1.1.2. Métodos de detección de daños
Como ya se ha comentado, para testear el sistema, éste será instalado en una
maqueta a escala que emule el comportamiento de la estructura real. El
comportamiento se evaluará en diferentes condiciones de funcionamiento, bajo
diferentes niveles de daños, etc. Para la detección de daños podemos usar varios
algoritmos diferentes (aunque los métodos de detección de daños que se exponen a
continuación serán explicados detalladamente en sucesivos entregables, cabe
mencionarlos en este epígrafe para tenerlos presentes):
- Cambio de la frecuencia natural de la estructura [15]
Tal y como se comentaba en 2.2 la frecuencia fundamental de la estructura,
normalmente, baja a medida que se incrementan los daños. El problema está
en que esta frecuencia es proporcional a la raíz cuadrada de la rigidez de la
estructura, por lo que para notar un cambio significativo en la frecuencia
fundamental hemos de causar importantes daños en la estructura. El cálculo
de las frecuencias fundamentales se detalla en el epígrafe 4.1.1.2.1.
- Cambio de los modos de vibración [15]

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
57
Los modos de vibración cambian cuando la estructura en cuestión sufre
daños o está en condiciones de funcionamiento diferentes. Son más sensibles
a daños en la estructura que la frecuencia natural, por lo que parecen una
mejor solución.
La siguiente cuestión es decidir cuántos modos de vibración se han de
considerar en el análisis [14]:
El primer modo, si 𝑇𝐹 ≤ 0.75 𝑠
Los dos primeros modos si 0.75 𝑠 ≤ 𝑇𝐹 ≤ 1.25 𝑠
Los tres primeros modos si 𝑇𝐹 > 1.25 𝑠
Donde 𝑇𝐹 es el periodo fundamental de la estructura (el cálculo de este
parámetro se explica en el apartado 4.1.1.2.1).
Para considerar los efectos de los distintos modos se usa la siguiente
relación:
𝑇𝑖 =𝑇𝐹
(2𝑖 − 1)
- Algoritmo AR-ARX (Modelo de coeficientes autorregresivos y autorregresivos
con entradas exógenos) [15], [16].
Este algoritmo es más apropiado pues, básicamente, consiste en comparar
los datos obtenidos de las mediciones en un estado de salud estructural
desconocido y compararlos con los que hay almacenados en una base de
datos. Los datos de esta base de datos fueron adquiridos en un estado de
buena salud estructural y bajo diferentes condiciones de trabajo. Dicho esto
podemos decir que, teniendo una base de datos suficientemente amplia
podremos detectar daños en la estructura. Aunque es un modelo que requiere
más procesamiento de datos, es más fiable que la detección por cambios en
las frecuencias naturales o en las formas de modo. El funcionamiento del
algoritmo se resume en la siguiente imagen.
Figura 26. Algoritmo AR - ARX

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
58
Donde
- 𝑦𝑘 = 𝑏𝑖𝑦𝑦𝑘−𝑖
𝑝𝑖=1 + 𝑟𝑘
𝑦. Los coeficientes 𝑏𝑖
𝑦 son los coeficientes AR
- 𝛼𝑖 y 𝛽𝑖 son los coeficientes ARX
4.1.1.2.1. Cálculo del periodo fundamental de los edificios
4.1.1.2.1.1. Método 1
De forma simplificada podemos calcular el periodo fundamental de la estructura (y por
tanto la frecuencia) como [14]:
- Para edificios con muros de fábrica de ladrillo o bloques
𝑇𝐹 = 0.06𝐻 𝐻 (2𝐿 + 𝐻)
𝐿
- Edificios con pórticos de hormigón armado sin la colaboración de pantallas
rigidizadoras
𝑇𝐹 = 0.09𝑛
- Edificios con pórticos de hormigón armado con la colaboración de pantallas
rigidizadoras
𝑇𝐹 = 0.07𝑛 𝐻 (𝐵 + 𝐻)
- Edificios de pórticos rígidos de acero laminado.
𝑇𝐹 = 0.11𝑛
- Edificios de pórticos de acero laminado con planos triangulados resistentes.
𝑇𝐹 = 0.085𝑛 𝐻 (𝐵 + 𝐻)
Siendo:
𝐻: Altura de la edificación, sobre rasante, en metros.
𝑛: Número de plantas sobre rasante
𝐵: Dimensión de las pantallas rigidizadoras, o de los planos triangulados, en el sentido
de la oscilación, en metros
𝐿: Dimensión en planta de la edificación, en el sentido de la oscilación, en metros.
- Para el resto de edificios de hasta cuatro plantas podemos asumir que, para
el método simplificado, 𝑇𝐹 = 0.3 𝑠

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
59
Figura 27. Esquema de los diferentes tipos de estructuras
4.1.1.2.1.2. Método 2
Para el caso de construcciones con suelos rígidos podemos tomar otro modelo [17].
Figura 28. Esquema de construcciones con suelos rígidos
Consideramos que hay 𝑝 columnas en cada piso (en el caso que se muestra en la
Figura 28, 𝑝 = 2 )
𝜏0 = 4 𝑀(∆)
12 · 𝐸 · 𝐼 · 𝑝
Donde se ha considerado que la rigidez por planta es: 𝐺𝐴𝑠 =12 · 𝐸 · 𝐼 · 𝑝
(∆)2
Si las columnas no son iguales, pero están fabricadas con el mismo material, 𝐼 · 𝑝
debe ser reemplazado por 𝐼𝑖 para cada piso.
En el caso anterior tenemos que la masa del “suelo” superior es 𝑀/2. Si tenemos una
masa 𝑀 en tal piso:

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
60
𝜏𝑡 = 2𝜋 𝑛(∆)
12 · 𝐸 · 𝐼 · 𝑝
𝜏2 = 𝜏𝑜2 + 𝜏𝑡
2
Donde 𝜏 es el periodo fundamental, incluyendo la masa adicional.
4.2. INSTALACIÓN EN EL MODELO A ESCALA
La decisión de instalar primero el sistema en éste modelo se justifica por las
siguientes razones:
- Instalar el sistema desarrollado directamente sobre la estructura real significa
una importante inversión económica, pues para tal caso se debería disponer
de la estructura real sin conocer la viabilidad del sistema.
- El modelo a escala permite realizar modificaciones sobre él, así como
pruebas destructivas sin suponer ningún coste de gran magnitud,
económicamente hablando. De esta forma es posible evaluar el
comportamiento de la estructuras en diferentes condiciones de salud.
- El comportamiento de la estructura real sólo podemos evaluarlo cuando ésta
se encuentra en un buen estado de salud, pues de lo contrario la instalación
del podría resultar peligroso. Otra opción sería instalar el sistema en la
estructura real en condiciones saludables y posteriormente causarle daños,
pero de nuevo, esto resulta muy costoso desde el punto de vista económico.
4.2.1. Objetivo
Los objetivos perseguidos en la instalación del sistema, en el modelo que emula el
comportamiento de las estructuras a tamaño real, son los siguientes [18]-[24]:
- Comprobación de que la estructura de la red de sensores se realiza de forma
correcta
- Verificación de la correcta comunicación entre dichos sensores.
- Calibración de los sensores instalados
- Analizar la precisión de los algoritmos de detección de daños utilizados. El
estudio de estos algoritmos se realizará en posteriores informes.
- Comprobación del correcto funcionamiento del sistema como conjunto
- Comprobar que los resultados obtenidos son muy próximos a los calculados
teóricamente
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
61
4.3. INSTALACIÓN EN EL EDIFICIO REAL
4.3.1. Objetivo
Una vez que hemos realizado la instalación (y el testeo del sistema) en el modelo
escalado y el funcionamiento del sistema es correcto pasamos a instalarlo en un
edificio real (que cumpla con las especificaciones del epígrafe 4.1.1) con los siguientes
fines:
- Comprobar que la comunicación entre sensores es correcta. Este punto es
importante, pues en este caso las distancias son mayores y las
comunicaciones deben soportar las atenuaciones producidas por los muros
- Corroborar que los datos obtenidos se ajustan a los calculados teóricamente
mediante los modelos simplificados expuestos anteriormente.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
62

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
63
CAPÍTULO 5
Propuesta de
especificaciones para un
sistema SHM

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
64
5. PROPUESTA DE ESPECIFICACIONES
PARA UN SISTEMA SHM
El objetivo de este epígrafe no es otro que proponer una serie de especificaciones mínimas a cumplir por el hardware del sistema para, partiendo de ahí, poder implementar el sistema.
En la mayoría de los casos, estas especificaciones se obtienen realizando simulaciones de la estructura que se desea monitorizar. A dicha estructura se le provocan diferentes niveles daños (en la simulación) y se comprueba la resolución del sistema. Si la respuesta no es la esperada se imponen a los componentes hardware unas características más restrictivas, hasta que se obtiene la respuesta esperada.
Hasta la fecha, para la realización de este proyecto, no se dispone de ninguna estructura ni de las herramientas de simulación y por tanto no es posible simularla por lo que se tratará de buscar unas especificaciones mínimas a cumplir por el hardware a partir de otros sistemas de Monitorización de Salud Estructural (SHM) desarrollados y de una serie de razonamientos.
Lo primero será especificar qué bloques hardware se incluirán en el sistema para poder establecer las especificaciones de los mismos.
El modelo es el que a continuación se presenta.
Figura 29. Esquema de bloques de un nodo
Basándonos en el modelo propuesto, las características en las que hemos de fijarnos de cada dispositivo serán:
- Sensores. o Acelerómetros
Alimentación Rango Sensibilidad
o Termómetros Rango
o Anemómetros Rango
- ADC o Frecuencia de digitalización o Resolución o Número de canales
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
65
- Procesador o Frecuencia o Nº bits
- Memoria o RAM o FLASH
- Transceptor RF o Alcance o Tasa de datos
5.1. PROPUESTA DE ESPECIFICACIONES
5.1.1. Obtención de las especificaciones
En este apartado se tratará de buscar unas especificaciones a cumplir mínimas para los componentes hardware del sistema de monitorización.
- Sensores. Primero de todo cabe decir que son muchos los tipos de sensores que se pueden instalar en el sistema (acelerómetros, termómetros, anemómetros, sensores de desplazamiento, sensores de humedad, etc.) pero en nuestro caso nos centraremos en acelerómetros. A partir de acelerómetros y usando el algoritmo AR-ARX (que se resume en el apartado 4.1.1.2) se puede conocer el estado de la estructura sin necesidad de tener información acerca de las condiciones ambientales. Si fuese necesario se añadirían al sistema termómetros y anemómetros, por lo que también se realizará el estudio para las especificaciones de estos sensores.
o Acelerómetros.
Alimentación: Este es un parámetro general para todos los componentes del sistema. Uno de los objetivos de este proyecto es que los dispositivos sean de bajo consumo. Por tanto, nos interesa un valor de tensión (y de corriente) de alimentación lo más bajo posible, así una primera estimación puede ser tomar valores entre 3 y 5 V aproximadamente.
Rango dinámico: Según [24], para monitorizar grandes estructuras, es suficiente con un rango dinámico de unas 2g, es decir, [-1g, 1g]. En nuestro caso tomaremos un rango del doble de magnitud para asegurarnos que tenemos suficiente rango, esto es [-2g, 2g].
Sensibilidad: Al igual que se ha hecho para la determinación de rango dinámico, para la determinación de la sensibilidad nos basaremos en la bibliografía. Así en [26] se utiliza el CXL01LF1 que tiene un ruido de 0.5 mg9 (depende del ancho de banda). Realizando una serie de pruebas, en el Puente Cañón de
9 La sensibilidad vendrá dada, en gran parte, por el nivel de ruido pues no tiene sentido de
hablar de una sensibilidad por debajo del nivel de ruido ya que no podrá ser medida.
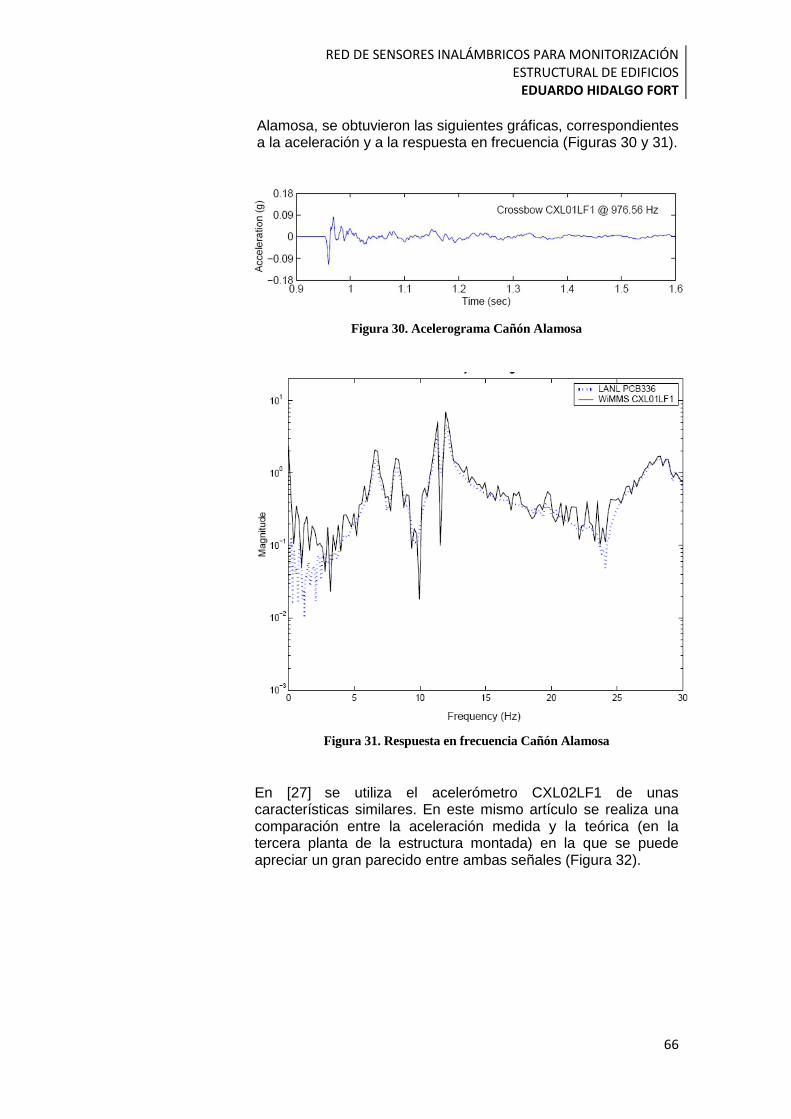
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
66
Alamosa, se obtuvieron las siguientes gráficas, correspondientes a la aceleración y a la respuesta en frecuencia (Figuras 30 y 31).
Figura 30. Acelerograma Cañón Alamosa
Figura 31. Respuesta en frecuencia Cañón Alamosa
En [27] se utiliza el acelerómetro CXL02LF1 de unas características similares. En este mismo artículo se realiza una comparación entre la aceleración medida y la teórica (en la tercera planta de la estructura montada) en la que se puede apreciar un gran parecido entre ambas señales (Figura 32).
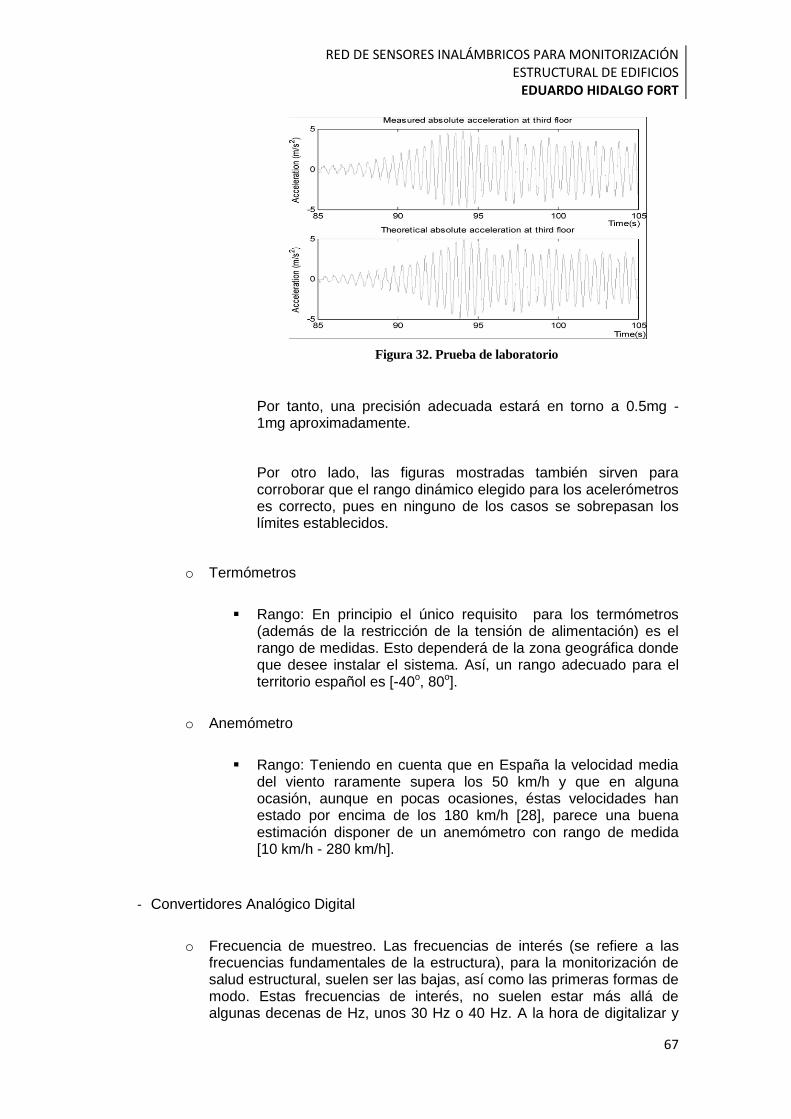
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
67
Figura 32. Prueba de laboratorio
Por tanto, una precisión adecuada estará en torno a 0.5mg - 1mg aproximadamente.
Por otro lado, las figuras mostradas también sirven para corroborar que el rango dinámico elegido para los acelerómetros es correcto, pues en ninguno de los casos se sobrepasan los límites establecidos.
o Termómetros
Rango: En principio el único requisito para los termómetros (además de la restricción de la tensión de alimentación) es el rango de medidas. Esto dependerá de la zona geográfica donde que desee instalar el sistema. Así, un rango adecuado para el territorio español es [-40o, 80o].
o Anemómetro
Rango: Teniendo en cuenta que en España la velocidad media del viento raramente supera los 50 km/h y que en alguna ocasión, aunque en pocas ocasiones, éstas velocidades han estado por encima de los 180 km/h [28], parece una buena estimación disponer de un anemómetro con rango de medida [10 km/h - 280 km/h].
- Convertidores Analógico Digital
o Frecuencia de muestreo. Las frecuencias de interés (se refiere a las frecuencias fundamentales de la estructura), para la monitorización de salud estructural, suelen ser las bajas, así como las primeras formas de modo. Estas frecuencias de interés, no suelen estar más allá de algunas decenas de Hz, unos 30 Hz o 40 Hz. A la hora de digitalizar y
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
68
teniendo en cuenta el Teorema de Nyquist – Shannon, la frecuencia de muestreo debería estar en unos 70 u 80 Hz.
Un factor a tener en muy en cuenta es que las estructuras son amortiguadas. Si la estructura es fuertemente amortiguada la respuesta en frecuencia ante una excitación se atenúa rápidamente, luego el tiempo de ventana para poder muestrear es muy corto (puede ser menor de 1 segundo), por lo que hay que aumentar más la frecuencia para tener un número significativo de muestras y así poder realizar un análisis fiable [29]. Estaríamos hablando de unas frecuencias de muestreo de unos 200 Hz.
También existe la posibilidad de realizar un suavizado (promediado de la señal). Esto será posible si aumentamos la frecuencia de muestreo y así poder realizar sobremuestreo sobre la señal que se quiera digitalizar. Un factor de sobremuestreo Sover=10 supone una reducción del ruido en un factor Sover
1/2=3.16 [30]. Por tanto una frecuencia de muestreo adecuada puede ser 1 kHz.
o Resolución. Suponiendo que el rango dinámico elegido (4g) y la resolución (0.5 mg – 1 mg) son adecuados y teniendo en cuenta que la
sensibilidad de los acelerómetros está en torno a 300 𝑚𝑉 𝑔 , el cálculo
del número de bits necesarios para el ADC es simple.
4 𝑉
211= 1.953125
𝑚𝑔𝑏𝑖𝑡
4 𝑉
212= 0.9765625
𝑚𝑔𝑏𝑖𝑡
Por tanto una buena estimación para el número de bits será 𝑁 = 12. Este parámetro podrá variar en función de la sensibilidad del acelerómetro escogido, su rango dinámico, su nivel de ruido (que depende del ancho de banda), etc.
o Número de canales. Ya que se utilizarán acelerómetros tri-axiales, lo
adecuado es utilizar convertidores con el mismo número de canales. Un
canal por cada dimensión.
- Procesador
No se dispone de datos suficientes para establecer unos mínimos para un procesador, pero sí que se dispone de información sobre algunos sistemas desarrollados, instalados y testeados (y de los procesadores que se utilizan). Para establecer las características del procesador se hará uso de la información que se comentaba al respecto en el Estado del Arte, pues las necesidades computacionales del sistema que se está desarrollando en el presente proyecto son similares a las de los sistemas en los que se basa éste.
Los procesadores comúnmente utilizados y sus características más relevantes son las que a continuación se muestran (en posteriores epígrafes se detallarán

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
69
algunos de los sistemas completos en los que se utilizan estos microcontroladores, otros ya fueron desarrollados en el informe del Estado del Arte) [31]:
o La placa MICA2 (ya mencionada en otros entregables) hace uso del bloque MPR400 (procesador más transceptor radio). El procesador en el que está basado es el Atmel ATmega128L que presenta las siguientes características:
Bus de datos de 8 bits Hasta 16 MIPS a 16 MHz (solo se puede alcanzar con el
ATmega128) 128 kB de memoria Flash 4 kB de memoria EEPROM 4 kB de memoria SRAM Posible ampliación de memoria hasta 64 kB de memoria externa Interfaz SPI 8 canales ADC de 10 bits 6 modos de ahorro de energía (Ocioso, Reducción de ruido
ADC, Power-save, Apagado, Standby y Standby extendido) Frecuencia del microcontrolador programable por software Voltaje de 2.7 a 5.5 V. Trabaja de 0 a 8 MHz. Consumo: 15 mA trabajando a 8 MHz
o La placa MICAZ hace uso del bloque MPR2400CA, que al igual que el MPR400 está basada en el microprocesador Atmel ATmega128L.
o Atmel AT90S8515 AVR Procesador de 8 bits Hasta 8 MIPS a 8 MHz 8 kB de memoria Flash 512 Bytes de memoria SRAM 412 Bytes de memoria EEPROM Consumo
Activo: 3 mA
Modo ocioso: 1 mA
Apagado: < 1 mA Voltaje entre 2.7 y 6 V Trabaja de 0 a 8 MHz dependiendo del modelo (AT90S8518-4 ó
AT90S8515-8).
o Motorola MPC555 Se suele utilizar de apoyo a un microcontrolador de bajo
consumo Procesador de 32 bits 448 kB de memoria EEPROM 26 kB de memoria SRAM Rango de voltaje: 4V a 6V Trabaja a 40 MHz

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
70
o Atmel ATmega163L Bus de 8 bits Hasta 8 MIPS a 8 MHz 4 modos de ahorro de energía: Ocioso, Reducción de ruido
ADC, Power-save y apagado 16 kB de memoria Flash 512 Bytes EEPROM 1024 Bytes de memoria SRAM Convertidor analógico-digital de 8 canales y 10 bits Interfaz SPI Consumo
Activo: 5mA
Modo Ocioso: 1.9mA
Apagado < 1µA Rango de voltaje: 2.7V – 5.5V Velocidad: 0 – 4 MHz
o MicroChip PIC16F87 Bus de 8 bits Modo de ahorro de energía Rango de voltaje: 2V – 5.5V 4 kB de memoria Flash Memoria RAM:
PIC16F873, 4: 192 bytes
PIC16F876, 7: 368 bytes Memoria EEPROM:
PIC16F873, 4: 128 bytes
PIC16F876, 7: 256 bytes Bajo consumo
<0.6 mA a 3V, 4 MHz
20 µA a 3V, 32 kHz
<1 µA en standby Convertidor analógico-digital multicanal de 10 bits Interfaz SPI Interfaz I2C Interfaz PSP (puerto paralelo) de 8 bits
o Texas Instruments MSP430F1611 Arquitectura de 16 bits Convertidor analógico-digital de 12 bits Convertidor digital-analógico de 2 canales de 12 bits Interfaz SPI Interfaz I2C 48 kB de memoria Flash 256 bytes de memoria EEPROM 10 kB de memoria RAM Rango de voltaje: 1.8V – 3.6V Cinco modos de ahorro de energía Consumo ultra bajo
Modo activo: 330 µA a 1 MHz, 2.2 V
Modo standby: 1.1µA

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
71
- Memoria Al igual que ocurre con los microprocesadores, para las memorias no se dispone de unas necesidades mínimas, todo dependerá del algoritmo que se decida utilizar, la cantidad de datos que se desee almacenar, el tamaño de los propios datos, el tamaño del Sistema Operativo, del software que se quiera instalar, etc. De los modelos presentados en el Estado del Arte obtenemos las siguientes especificaciones de memoria:
o No volátil (Flash o Flash más EPROM ó EEPROM)
128 kB son suficientes para almacenar un algoritmo de procesado de señales como es la FFT [26], a menos que se use algún algoritmo que ocupe más memoria. En cualquier caso, si ocupa más memoria habría que utilizar otro microcontrolador con una capacidad de memoria de programa superior o conectar una memoria no volátil externa, si fuera posible (por ejemplo el microcontrolador MPC555 de Motorola).
o Volátil (RAM, SRAM, DRAM, ó alguna variante)
El micro Atmel ATmega128L cuenta con 4 kB SRAM y se ha utilizado en varios sistemas [26], [27], [29], etc., siendo suficiente ésta capacidad, por lo que parece una buena estimación. Por el contrario en otro de los sistemas que se exponen en los próximos puntos, se ha añadido una memoria externa de 128 kB SRAM para almacenar los datos medidos, pues no es suficiente con la memoria que proporciona el microcontrolador (4 kB). Por tanto no se puede hacer una estimación exacta hasta que no esté seleccionado el microcontrolador, el Sistema Operativo, el algoritmo de evaluación, la cantidad de medidas a almacenar, el tamaño de las medidas, etc.
- Transceptor.
En cuanto al transceptor hay dos aspectos principales a tener en cuenta (además del consumo de potencia) como son el alcance y la tasa de datos.
o Alcance. Este es un factor determinante, pues los nodos deben comunicarse entre ellos (o con su nodo servidor). En las tablas de características que se presentaron en el Estado del Arte se puede apreciar claramente que el alcance de los enlaces radio depende notablemente de la frecuencia de trabajo. Así tenemos tres frecuencias de trabajo posibles: 2.4 GHz, 915 y 868 MHz (IEEE 802.15.4). Si de nuevo nos fijamos en las tablas anteriormente mencionadas, los transceptores que trabajan a 2.4 GHz son adecuados para espacios exteriores, mientras que para espacios interiores son más adecuados los transceptores que trabajan a 915 o 868 MHz. Esto se corrobora con el estudio presentado por Barry McLarnon en 1997. Según esto, las
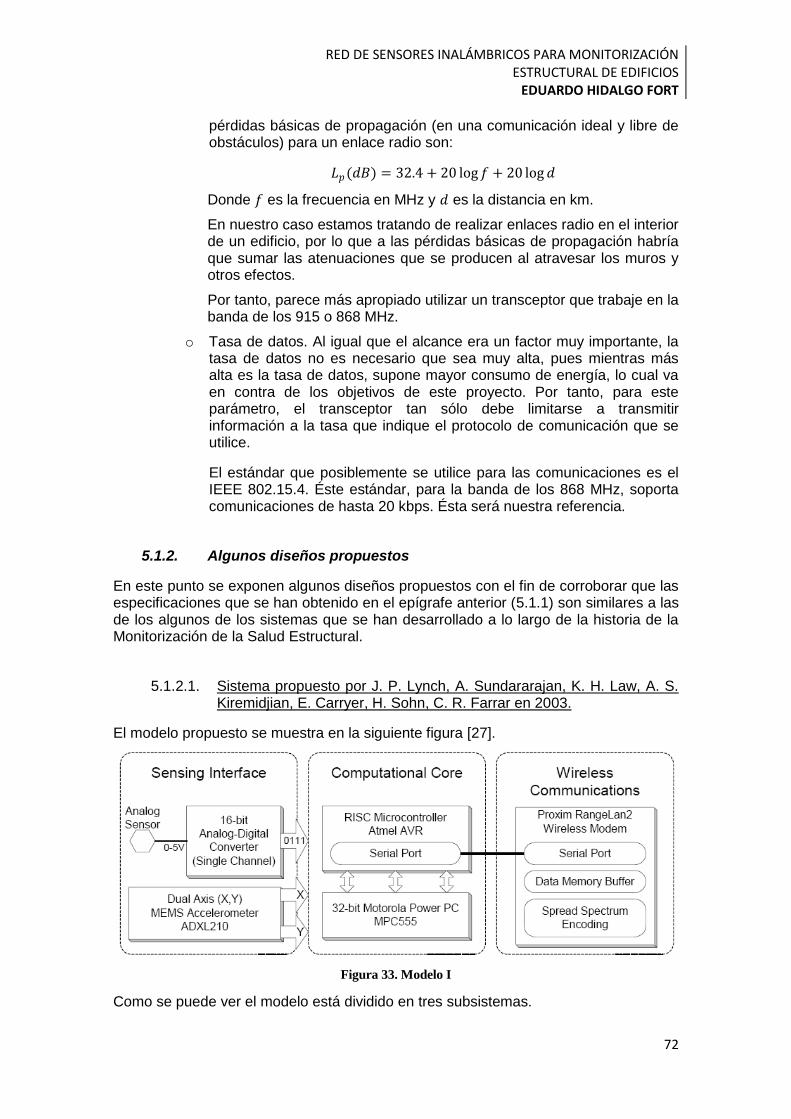
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
72
pérdidas básicas de propagación (en una comunicación ideal y libre de obstáculos) para un enlace radio son:
𝐿𝑝(𝑑𝐵) = 32.4 + 20 log𝑓 + 20 log𝑑
Donde 𝑓 es la frecuencia en MHz y 𝑑 es la distancia en km.
En nuestro caso estamos tratando de realizar enlaces radio en el interior de un edificio, por lo que a las pérdidas básicas de propagación habría que sumar las atenuaciones que se producen al atravesar los muros y otros efectos.
Por tanto, parece más apropiado utilizar un transceptor que trabaje en la banda de los 915 o 868 MHz.
o Tasa de datos. Al igual que el alcance era un factor muy importante, la tasa de datos no es necesario que sea muy alta, pues mientras más alta es la tasa de datos, supone mayor consumo de energía, lo cual va en contra de los objetivos de este proyecto. Por tanto, para este parámetro, el transceptor tan sólo debe limitarse a transmitir información a la tasa que indique el protocolo de comunicación que se utilice.
El estándar que posiblemente se utilice para las comunicaciones es el IEEE 802.15.4. Éste estándar, para la banda de los 868 MHz, soporta comunicaciones de hasta 20 kbps. Ésta será nuestra referencia.
5.1.2. Algunos diseños propuestos
En este punto se exponen algunos diseños propuestos con el fin de corroborar que las especificaciones que se han obtenido en el epígrafe anterior (5.1.1) son similares a las de los algunos de los sistemas que se han desarrollado a lo largo de la historia de la Monitorización de la Salud Estructural.
5.1.2.1. Sistema propuesto por J. P. Lynch, A. Sundararajan, K. H. Law, A. S. Kiremidjian, E. Carryer, H. Sohn, C. R. Farrar en 2003.
El modelo propuesto se muestra en la siguiente figura [27].
Figura 33. Modelo I
Como se puede ver el modelo está dividido en tres subsistemas.
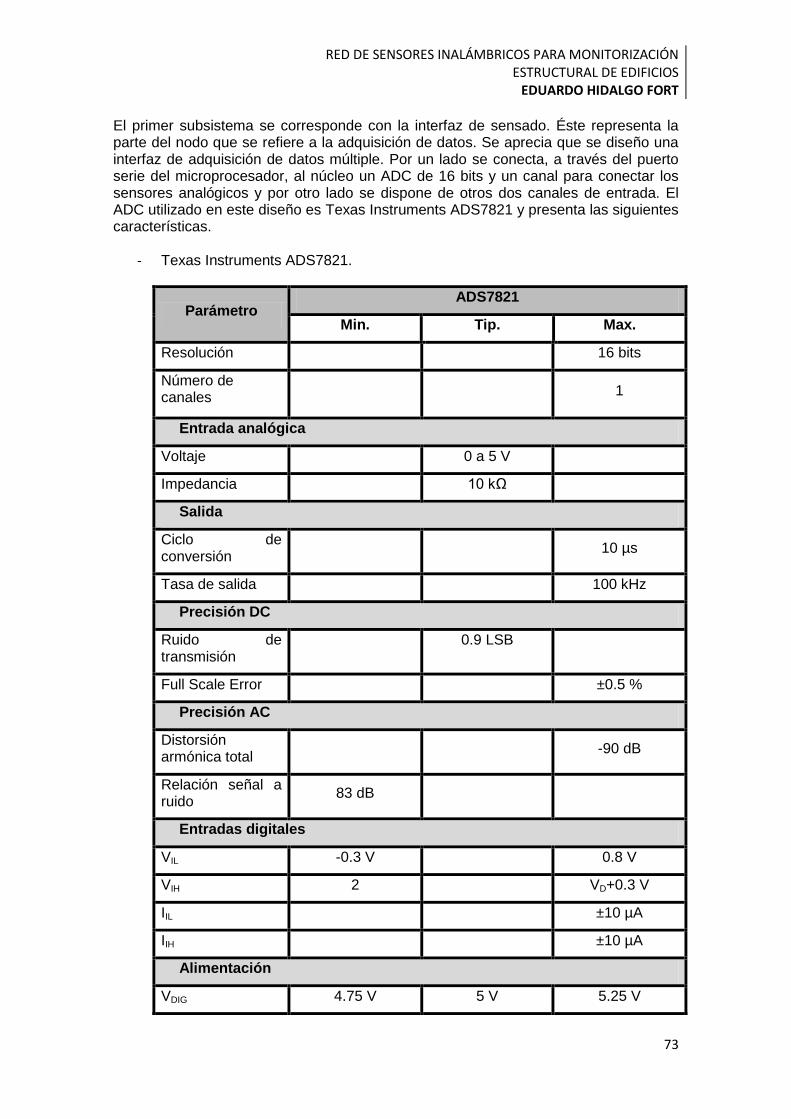
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
73
El primer subsistema se corresponde con la interfaz de sensado. Éste representa la parte del nodo que se refiere a la adquisición de datos. Se aprecia que se diseño una interfaz de adquisición de datos múltiple. Por un lado se conecta, a través del puerto serie del microprocesador, al núcleo un ADC de 16 bits y un canal para conectar los sensores analógicos y por otro lado se dispone de otros dos canales de entrada. El ADC utilizado en este diseño es Texas Instruments ADS7821 y presenta las siguientes características.
- Texas Instruments ADS7821.
Parámetro ADS7821
Min. Tip. Max.
Resolución 16 bits
Número de canales 1
Entrada analógica
Voltaje 0 a 5 V
Impedancia 10 kΩ
Salida
Ciclo de conversión
10 µs
Tasa de salida 100 kHz
Precisión DC
Ruido de transmisión
0.9 LSB
Full Scale Error ±0.5 %
Precisión AC
Distorsión armónica total
-90 dB
Relación señal a ruido
83 dB
Entradas digitales
VIL -0.3 V 0.8 V
VIH 2 VD+0.3 V
IIL ±10 µA
IIH ±10 µA
Alimentación
VDIG 4.75 V 5 V 5.25 V
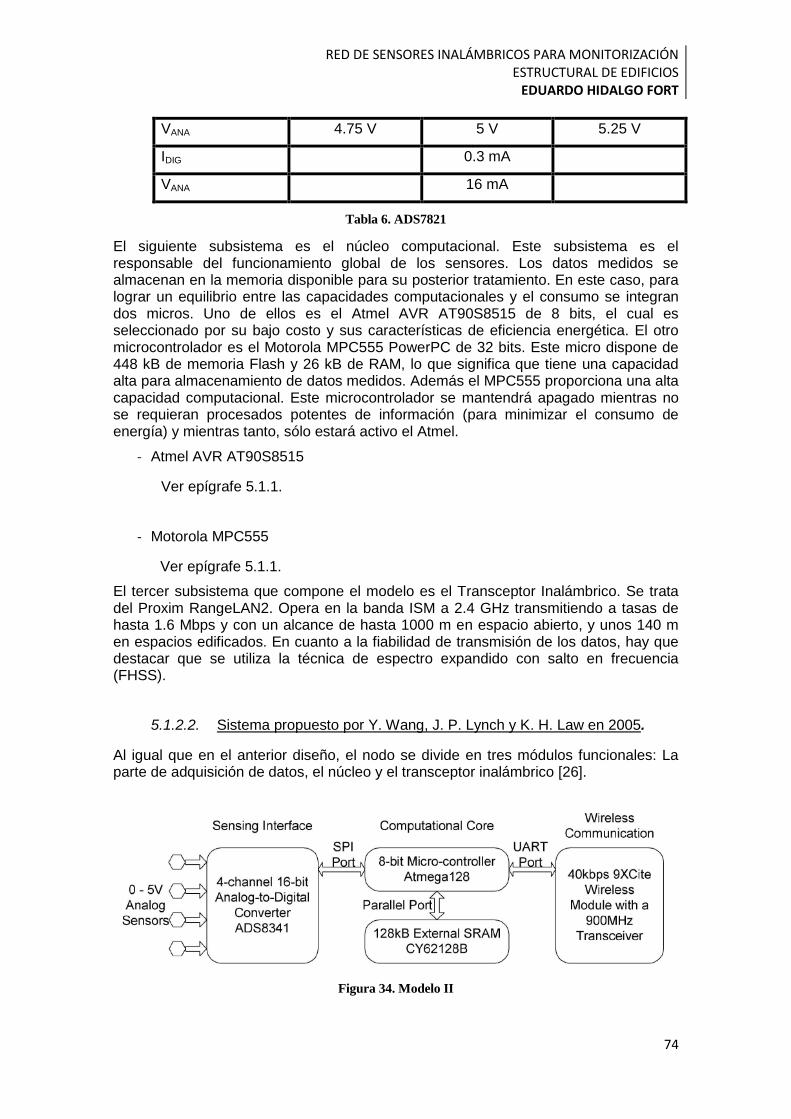
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
74
VANA 4.75 V 5 V 5.25 V
IDIG 0.3 mA
VANA 16 mA
Tabla 6. ADS7821
El siguiente subsistema es el núcleo computacional. Este subsistema es el responsable del funcionamiento global de los sensores. Los datos medidos se almacenan en la memoria disponible para su posterior tratamiento. En este caso, para lograr un equilibrio entre las capacidades computacionales y el consumo se integran dos micros. Uno de ellos es el Atmel AVR AT90S8515 de 8 bits, el cual es seleccionado por su bajo costo y sus características de eficiencia energética. El otro microcontrolador es el Motorola MPC555 PowerPC de 32 bits. Este micro dispone de 448 kB de memoria Flash y 26 kB de RAM, lo que significa que tiene una capacidad alta para almacenamiento de datos medidos. Además el MPC555 proporciona una alta capacidad computacional. Este microcontrolador se mantendrá apagado mientras no se requieran procesados potentes de información (para minimizar el consumo de energía) y mientras tanto, sólo estará activo el Atmel.
- Atmel AVR AT90S8515
Ver epígrafe 5.1.1.
- Motorola MPC555
Ver epígrafe 5.1.1.
El tercer subsistema que compone el modelo es el Transceptor Inalámbrico. Se trata del Proxim RangeLAN2. Opera en la banda ISM a 2.4 GHz transmitiendo a tasas de hasta 1.6 Mbps y con un alcance de hasta 1000 m en espacio abierto, y unos 140 m en espacios edificados. En cuanto a la fiabilidad de transmisión de los datos, hay que destacar que se utiliza la técnica de espectro expandido con salto en frecuencia (FHSS).
5.1.2.2. Sistema propuesto por Y. Wang, J. P. Lynch y K. H. Law en 2005.
Al igual que en el anterior diseño, el nodo se divide en tres módulos funcionales: La parte de adquisición de datos, el núcleo y el transceptor inalámbrico [26].
Figura 34. Modelo II

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
75
En este caso, para el módulo de adquisición de datos se selecciona el convertidor ADS8341 de Texas Instruments. Este ADC presenta las siguientes características.
Si la alimentación es 5V:
Parámetro ADS8341
Min. Tip. Max.
Resolución 16 bits
Número de canales
4
Rendimiento
Error de offset 2 mV
Salida
Tasa de salida 100 kHz
Características dinámicas
Distorsión armónica total
-90 dB
Relación Señal-(Ruido+Distorsión)
86 dB
Aislamiento entre canales
100 dB
Entradas digitales
VIL -0.3V 0.8V
VIH 3V 5.5V
VOL 0.4V
VOH 3.5V
Tabla 7. ADS8341alimentado a 5V
Si la alimentación es 2.7V
Parámetro ADS8341
Min. Tip. Max.
Resolución 16 bits
Número de canales
4

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
76
Rendimiento
Error de offset 1 mV
Salida
Tasa de salida 100 kHz
Características dinámicas
Distorsión armónica total
-90 dB
Relación Señal-(Ruido+Distorsión)
86 dB
Aislamiento entre canales
100 dB
Entradas/Salidas digitales
VIL -0.3V 0.8V
VIH 1.89V 5.5V
VOL 0.4V
VOH 2.16V
Tabla 8. ADS8341 alimentado a 2.7V
Para controlar los diferentes elementos hardware del nodo y realizar el procesamiento de datos se hace uso de un microcontrolador de bajo consumo como es el Atmel ATmega128L. Para conocer algunas especificaciones ver epígrafe 5.1.1. Este microcontrolador da la posibilidad de utilizar una memoria externa de 64 kB. En este diseño se conecta una memoria RAM externa de 128 kB para almacenar datos de medidas, pudiéndose seleccionar los 64 kB superiores o los 64 kB inferiores.
Para la transmisión de información inalámbrica se elige el transceptor MaxStream 9XCite porque provee un alcance relativamente alto consumiendo poca cantidad de energía.
MaxStream 9XCite
Rendimiento
Interior / Urbano Hasta 90 m
Exterior Hasta 300 m
Potencia de salida 4 mW (6dBm)
Tasa de salida 9600 bps 38400 bps
Sensibilidad -108 dBm -104 dBm
Alimentación Tensión Alimentación 2.85 – 5.5 VDC
Corriente en transmisión 55 mA

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
77
Corriente en recepción 35 mA
Corriente apagado < 20 µA
General
Dimensiones 4.06cm x 7.18 cm x 0.89
cm
Peso 24g
Temperatura de operación 0 – 70 Co
Red y seguridad
Frecuencia de trabajo ISM 902 – 928 MHz
Topologías soportadas Peer-to-Peer, Punto a Multipunto, Multipunto
Número de canales
7 canales para frequency hopping y 25 canales para transmisiones en una sola
frecuencia
Tabla 9. Transceptor MaxStream 9XCite
5.1.2.3. Sistema diseñado por J. Wu, S. Yuan, X. Zhao, Y. Yin y W. Ye en 2007.
De nuevo el sistema se asemeja a los 2 mostrados anteriormente, constando de los mismos bloques funcionales [32].
Figura 35. Modelo III
Como microprocesador se usa de nuevo el ATmega128 de Atmel, al que también se le añade una memoria externa para conseguir un mayor almacenamiento de las medidas

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
78
tomadas a lo largo del tiempo. En este caso el transceptor inalámbrico que se utiliza es el TI CC1000 RF, cuyas características se exponen más adelante (4.5.).
5.2. PROPUESTA DE COMPONENTES HARDWARE
5.2.1. Acelerómetro
Como acelerómetro se propone el modelo ADXL335 de Analog Devices. Se selecciona este acelerómetro porque cumple con los requisitos propuestos en el epígrafe correspondiente (5.1.1). Sus características son:
Parámetro Condición ADXL335
Min. Tip. Max.
Entrada
Rango de medida ±3g ±3.6g
No linealidad % del fondo de
escala ±0.3%
Sensibilidad
Sensibilidad en los 3 ejes
Vs=3V 270mV/g 300mV/g 330mV/g
Dependencia con la temperatura
Vs=3V ±0.01 %/oC
Ruido
Densidad de ruido en ejes X e Y
Vs=3V 150µg/ 𝐻𝑧
Densidad de ruido en eje Z
Vs=3V 300µg/ 𝐻𝑧
Frecuencia
Ancho de banda ejes X e Y
Según condensador de
salida 0.5 Hz 1600 Hz
Ancho de banda eje Z Según
condensador de salida
0.5 Hz 550 Hz
Alimentación
Voltaje 1.8 V 3.6 V
Corriente Vs=3V 350 µA
Temperatura
Rango de operación -40 µA 85 µA
Tabla 10. ADXL335

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
79
5.2.2. Termómetro
El modelo de termómetro a instalar en el sistema, en caso de que fuera necesario es el TMP105 de Texas Instruments. Se trata de un cuyas características principales son las siguientes.
Parámetro Condición TMP105
Min. Tip. Max
Entrada de Temperatura
Rango -40 oC 125oC
Precisión -25 oC a 85 oC ±0.5 oC ±2 oC
-40 oC a 125 oC ±1 oC ±3 oC
Resolución Seleccionable 0.0625
oC
Entradas/Salidas Digitales
VIH 1.2V 6V
vIL -0.5V 0.6V
Resolución Seleccionable 9 a 12
Bits
Tiempo de conversión
9 Bits 27.5ms 37.5ms
10 Bits 55ms 75ms
11 Bits 110ms 150ms
12 Bits 220ms 300ms
Tiempo de salida 25ms 54ms 74ms
Alimentación
Rango operación 2.6V 3.3V
Corriente de reposo
Bus serie inactivo 50µA 85µA
Bus serie activo, Frec=400kHz
100µA
Corriente de apagado
Bus serie inactivo 1.5µA 3µA
Bus serie activo, Frec=400kHz
60µA
Rango de temperatura
Rango específico -40 oC 125 oC
Tabla 11. TMP105

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
80
5.2.3. Anemómetro
Como anemómetro se ha seleccionado el Ornytion 107, pues sus características se ajustan a las buscadas. Éstas son:
Ornytion 107
Generales
Función de transferencia V(m/s)=0.14+0.62·f(Hz)
Rango de operación 0 a 60 m/s
Rango de temperatura -25 a 60 oC
Umbral de arranque 0.3 m/s
Precisión 0.03 m/s
Eléctricas
Amplitud de salida Onda senoidal de 2VPP a 50 Hz
Frecuencia de salida 50 Hz=31.14 m/s
Tabla 12. Ornytion 107
5.2.4. ADC
El convertidor analógico-digital que se propone es el ADS115 de Texas Instruments. Presenta las siguientes características.
Parámetro Condición ADS1115
Min. Tip. Max
Rendimiento
Resolución Sin pérdidas 16 Bits
Tasa de muestreo
8, 16, 32, 64, 128, 250, 475
ó 860 samples/s
Variación de tasa de muestreo
Para todas las tasas -10% 10%
Número de canales Diferenciales 1 2
Simples 1 4

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
81
Entradas/Salidas Digitales
VIH 0.7
VDD 5.5 V
VIL GND-0.5V
0.3VDD
VOL IOL=3mA GND 0.15V 0.4V
IH
IL
Alimentación
Voltaje 2V 5.5V
Corriente Apagado a 25oC 0.5µA 2 µA
Apagado a 125oC 5 µA
Operando a 25oC 150 µA 200 µA
Operando a 125oC 300 µA
Potencia disipada VDD=5V 0.9mW
VDD=3.3V 0.5mW
VDD=2V 0.3mW
Temperatura
Rango de operación -40oC 125oC
Tabla 13. ADS1115
5.2.5. Microprocesador
Como se comentaba anteriormente, no es posible seleccionar un microprocesador concreto asegurando un máximo rendimiento con un mínimo consumo, debido a que dependerá de multitud de factores que aún no se han resuelto, como la selección del Sistema Operativo, de los convertidores ADC, de la cantidad de datos que se quieran tomar, del tamaño de estos datos, del consumo que estemos dispuestos a aceptar, etc. Según [27], el microcontrolador Atmel ATmega128 dispone de una cantidad de memoria suficiente como para almacenar el Sistema Operativo y algoritmos para realizar, transformadas de Wavelet, FFT, etc. El algoritmo que en nuestro caso implementaremos será AR-ARX, que según [33] requiere más capacidad de procesado que la FFT. Si no se pudiese realizar con este micro se seleccionaría otro más potente u otro microprocesador de refuerzo a éste. Por ejemplo el MPC555, que es el que se utiliza en [33].
5.2.6. Transceptor inalámbrico
Anteriormente se justificó utilizar transceptores de 868 MHz, por lo que nos centraremos en alguno que trabaje a esta frecuencia. En el epígrafe 5.1.2.2. se presentó el transceptor 9XCite. A continuación presentamos un transceptor que

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
82
presenta similares características, además de un menor consumo, se trata del TI CC1000 RF de Texas Instruments
Parámetro Condición CC1000
Min Tip Max
Frecuencia RF Programable en pasos
de 250 MHz 300 MHz 1000 MHz
Alimentación Misma para analógico
y digital 2.1 V 3 V 3.6 V
Transmisión
Tasa de datos 0.6 kBaud 76.8 Kbaud
Potencia de salida 433 MHz -20 dBm 10 dBm
868 MHz -20 dBm 5 dBm
Recepción
Sensibilidad (11.8 mA) 868 MHz -107 dBm
IP3 entrada -18 dBm
Consumo de corriente
Apagado 0.2 uA 1uA
Recibiendo La corriente es
programable para mejorar la sensibilidad
7.4/9.6
mA
Transmitiendo
0.01 mW (-20 dBm) 5.3/8.6
mA
0.3 mW (-5 dBm) 8.9/13.8
mA
1 mW (-0 dBm) 10.4/16.5
mA
3 mW (5 dBm) 14.8/25.4
mA
10 mW (10 dBm) 26.7 mA
Tabla 14. TI CC1000 RF

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
83
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
84
CAPÍTULO 6
Conclusiones y Líneas
Futuras de Investigación

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
85
6. CONCLUSIONES Y LÍNEAS FUTURAS
DE INVESTIGACIÓN
6.1. CONCLUSIONES 6.1.1. Análisis del trabajo realizado
Del estudio realizado se desprende, como conclusión principal ,que es muy
complicado diseñar un Sistema SHM general, es decir, apropiado para cualquier
estructura civil. Esto es debido a que cada estructura puede comportarse de una
manera diferente y por tanto, por un lado, los dispositivos hardware y, por otro, los
algoritmos de detección y localización, deberán ser elegidos específicamente para esa
estructura. Prueba de ello es que hay multitud de sistemas desarrollados (y validados)
y a día de hoy siguen apareciendo nuevos sistemas, (con nuevos componentes
harware y nuevos algoritmos) síntoma evidente de que no es suficiente con lo que
existe.
Otra conclusión extraída de este proyecto es la evidente progresión de las Tecnologías
de Monitorización de la Salud Estructural. Este campo se está haciendo tan importante
que ya se están diseñando elementos hardware orientados principalmente a este tipo
de tecnologías.
Tras la realización de este Proyecto, creo que se han adquirido suficientes
conocimientos para poder inicializarse en el desarrollo de sistemas para la
Monitorización de la Salud Estructural.
6.1.2. Objetivos alcanzados
- Estudio del Estado del Arte en las Structural Health Monitoring.
o Se ha realizado un estudio bastante amplio y detallado del Estado del
Arte en el que se han analizando la historia de los sistemas SHM, las
tecnologías utilizadas (así como cada uno de los componentes) y se
han mostrado la mayoría de los sistemas desarrollados hasta la fecha.
Este objetivo se ha cumplido.
- Estudio del estándar IEEE 802.15.4.
o Se ha realizado un análisis del estándar IEEE 802.15.4, debido a que
parece la mejor solución para la comunicación entre nodos. Gracias a
ellos se han podido proponer algunos elementos hardware como los
transceptores inalámbricos. Este objetivo se ha cumplido
- Modelado de un edificio
o Se ha realizado un estudio en el que se muestra cómo realizar el
modelado de un edificio, el cual es muy útil de cara a la implementación
del sistema en un edificio real. Este objetivo se ha cumplido
- Estudio detallado de los diferentes algoritmos para la detección, identificación y
localización de daños en estructuras

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
86
o Se ha realizado un estudio general de los algoritmos utilizados para la
detección, localización e identificación de daños estructurales. Incluso
se ha profundizado en alguno de ellos, los cuales pueden ser los más
interesantes de cara a la hora de realizar la implementación del sistema
que se propone. No obstante el resto de algoritmos no se ha podido
analizar en profundidad, principalmente, por falta de documentación y
difícil acceso a la documentación disponible. Por otro lado cabe decir
que estos algoritmos que no se han estudiado en detalle se mueven
fuera del campo que compete a las Telecomunicaciones, por lo que fue
muy complicado poder comprender apenas la idea general de éstos.
Por estas razones creo que este objetivo se ha cumplido.
- Propuesta de especificaciones para un sistema SHM
o Se ha propuesto un sistema compuesto por una serie de módulos
funcionales y se han obtenido una serie de especificaciones para éstos
módulos. En este punto hay que comentar que las especificaciones
propuestas podrían variar en función de algunas decisiones tomadas
(como el tamaño de los datos, el algoritmo elegido, etc.). En cualquier
caso, las especificaciones que se seleccionen para un la monitorización
de un edificio concreto no variarán en exceso de las propuestas en este
Proyecto, por lo que este objetivo se ha cumplido.
6.2. LÍNEAS FUTURAS DE INVESTIGACIÓN Como líneas futuras de investigación se proponen básicamente la continuación de
este Proyecto hasta la instalación del sistema:
- Estudio detallado de los diferentes algoritmos de detección de daños,
analizando minuciosamente la carga computacional y de memoria necesaria
para poder ejecutarlos correctamente. Esto puede ser muy útil de cara a
seleccionar el hardware óptimo para el sistema.
- Diseño de una red basada en IEEE 802.15.4.
- Implementación de la Red y de los Protocolos necesarios.
- Implementación de los algoritmos SHM.
- Testeado y validación del sistema.

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
87
RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
88
CAPÍTULO 7
Bibliografía

RED DE SENSORES INALÁMBRICOS PARA MONITORIZACIÓN ESTRUCTURAL DE EDIFICIOS
EDUARDO HIDALGO FORT
89
7. BIBLIOGRAFÍA [1] Los Alamos National Laboratory Report, LA-13976 – MS, 2003 “A Review of Structural Health Monitoring Literature: 1996 –
2001” [2] J. P. Lynch y K. J. Loh. “ A Summary Review of Wireless Sensors and Sensor Networks for Structural Health Monitoring” [3] http://www.sics.se/contiki/ [4] Isis Canada – September 2001 “Guidelines for Structural Health Monitoring” [5] Peter C.Chang, Alison Flatau y S.C.Liu. “Review Paper: Health Monitoring of Civil Ingrastructure” [6] Y. Zou, L. Tong y G.P. Steven, 2000. “Vibration-based model-dependent damage (delamination) identification and health
monitoring for composite structures – A review” [7] J. P. Lynch, K. H. Law, A. S. Kiremidjian, T. Kenny y E. Carryer. “A wireless modular monitoring system for civil structures” [8] J. P. Lynch, A. Sundararajan, K. H. Law, A. S. Kiremidjian, E. Carryer, H. Sohn y C. R. Farrar. “Field validation of a wireless
structural monitoring system on the Alamosa Canyon Bridge” [9] N. Kurata, B. F. Spencer Jr y M. Ruiz-Sandoval. “Risk monitoring of buildings with Wireless sensor networks” [10] J.P. Lynch, Y. Wang, K. J. Loh, J-H. Yi y C-B. Yun. “Performance monitoring of the Geumdang Bridge using a dense network of
high-resolution wireless sensors” [11] S. Kim, S. Pakzad, D. Culler, J. Demmel, G. Fenves, S. Glaser, M. Turon, 2007, “Health monitoring of Civil Ingrastructures
Using Wireless Sensor Networks” [12] S. W. Doebling, C. R. Farrar y M. B. Prime. “A summary review of vibration-based damage identification methods”. [13] S. Kim, S. Pakzad, d. Culler, J. Demmel, G. Fenves, S. Glaser, M. Turon. “Health Monitoring of Civil Infrastructures Using
Wireless Sensor Networks” [14] BOE núm. 244. Viernes, 11 de octubre de 2002 [15] Doebling S.W., Farrar C.R., Prime M.B. “A summary review of vibration-based damage identification methods [16] Zhang Q.W. “Statistical damage identification for bridges using ambient vibration data” [17] Szuladzinski G. Formulas for Mechanical and Structural Shock and Impact. “Natural Frequency”. 28-29 [18] Kurata N., F. Spencer Jr., Sandoval M.R. “Risk monitoring of buildings with wireless sensor networks” [19] Lynch JP, Law K.H., Kiremidjian A.S., Kenny T., Carryer E. “A wireless modular monitoring system for civil
structures” [20] Loh CH, Lynch JP., Lu KC., Wang Y., Chang CM., Lin PY., Yeh TH. “Experimental verification of a wireless
sensing and control system for structural control using MR dampers” [21] Lynch JP, Wang Y, Swartz R.A., Lu K.C., Loh C.H. “Implementation of a closed-loop structural control system using wireless
sensor networks” [22] Kopsaftopoulos F.P., Fassois S.D. “Vibration-Based Structural Damage Detection and Precise Assessment via
Stochastic Functionally Pooled Models” [23] Lynch JP. “Decentralization of wireless monitoring and control technologies for smart civil structures” [24] Wang Y., Lynch JP, Law K.H. “A wireless structural health monitoring system with multithreaded sensing devices:
design and validation” [25] N. Xu, S. Rangwala, K. K. chintalapudi, D. Ganesan, A. Broad, R. Govindan y D. Estrin, 2004. “A Wireless Sensor Network For
Structural Monitoring” [26] Y. Wang, J. P. Lynch y K. H. Law, 2005. “A wireless structural health monitoring system with multithreaded sensing devices:
design and validation” [27] J. P. Lybch, A. Sundararajan, K. H. Law, A. S. Kiremidjian, E. Carryer, H. Sohn y C. R. Farrar, 2003. “Field validation of a
wireless structural monitoring system on the Alamosa Canyon Bridge” [28] http://www.tecnun.es/asignaturas/ecologia/hipertexto/08RiesgN/150Viento.htm
[29] J. Paek, K. Chintalapudi, R. Govindan, J. Caffrey y S. Masri, 2004. “A Wireless Sensor Network for Structural Health Monitoring: Perfromance and Experience”
[30] S. Kim, S. Pakzad, D. Culler, J. Demmel, G. Fenves, S. Glaser y M. Turon, 2007. “Health Monitoring of Civil Infrastructures Using Wireless Sensor Networks”
[31] J. P. Lynch y K. J. Loh. “ A Summary Review of Wireless Sensors and Sensor Networks for Structural Health Monitoring” [32] J. Wy, S. Yuan, X. Zhao, Y. Yin y W. YE, 2007. “A Wireless sensor network node designed for exploring a Structural Health
Monitoring application” [33] J. P. Lynch, 2006. “An overview of wireless structural health monitoring for civil structures”