Robotica (2)
14
Ejercicio 3.4 Trama de vínculos desde la {0} a la {3} Tabla de parámetros de Denavit-Hartenberg para la configuración mostrada del brazo robot Parámetros D-H Articulac ión i θ i α i a i d i 1 θ 1 =0 π 2 0 L 1 +L 2 2 θ 2 =0 0 L 3 0 3 θ 3 =0 0 L 4 0 Matrices de Transformación Homogénea Cuando se aplica la representación de Denavit-Hartenberg para escoger los sistemas de coordenadas asociados a cada eslabón las matrices de transformación homogénea entre eslabones adyacentes (i-1) e (i) tiene la siguiente forma general para T i i−1 :
Transcript of Robotica (2)
Ejercicio 3.4
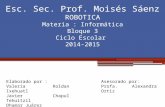
Trama de vínculos desde la {0} a la {3}
Tabla de parámetros de Denavit-Hartenberg para la configuración mostrada del brazo robot
Parámetros D-H
Articulación iθi α i a i d i
1θ1=0 π
20
L1+L2
2θ2=0 0
L3 0
3θ3=0 0
L4 0
Matrices de Transformación Homogénea
Cuando se aplica la representación de Denavit-Hartenberg para escoger los sistemas de coordenadas asociados a cada eslabón las matrices de transformación homogénea entre eslabones adyacentes ( i-1) e (i) tiene la siguiente forma general
para Tii−1 :
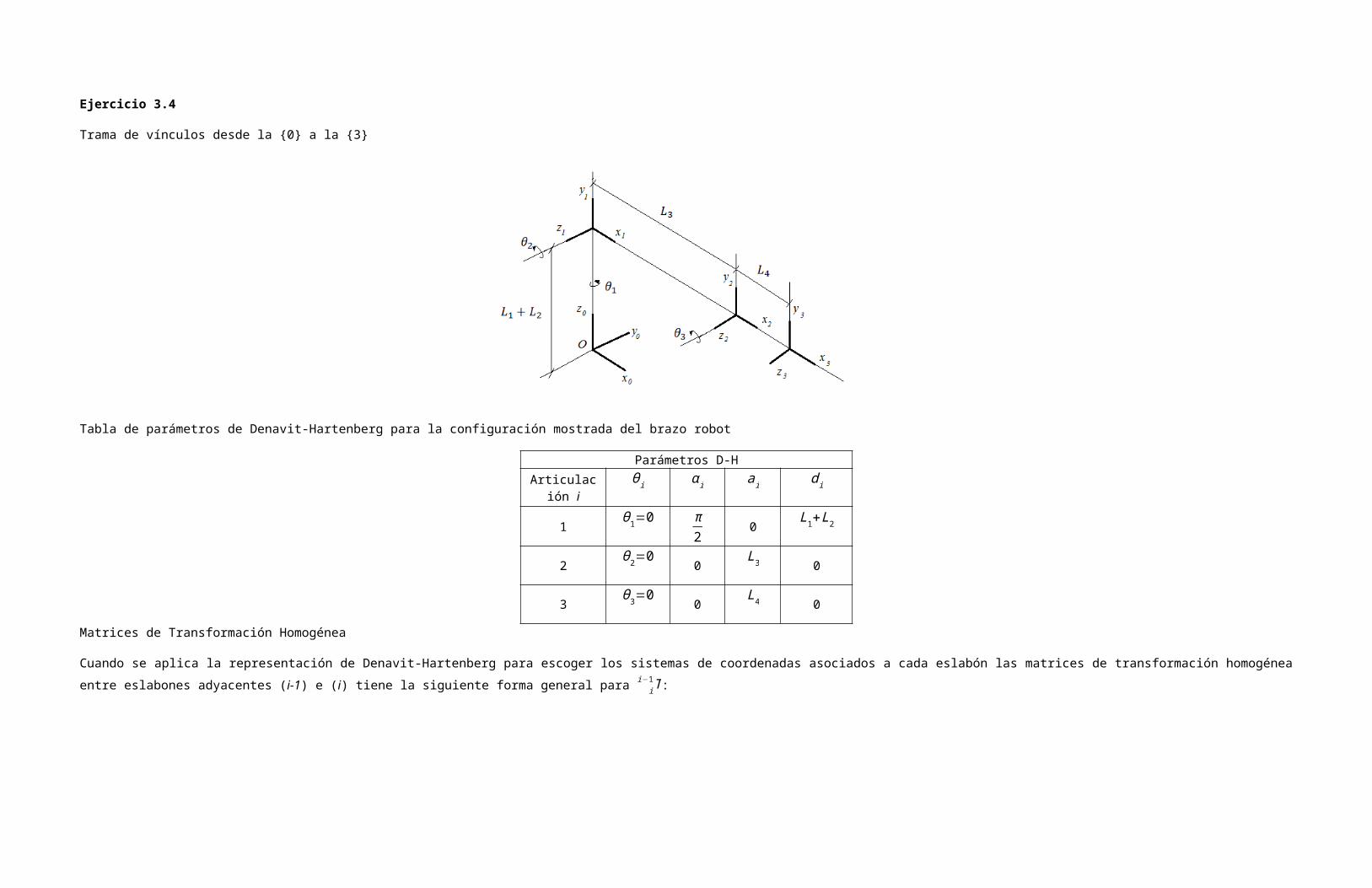
De esta manera al aplicar los parámetros D-H a esta expresión se obtiene:
Para T10
Para T21
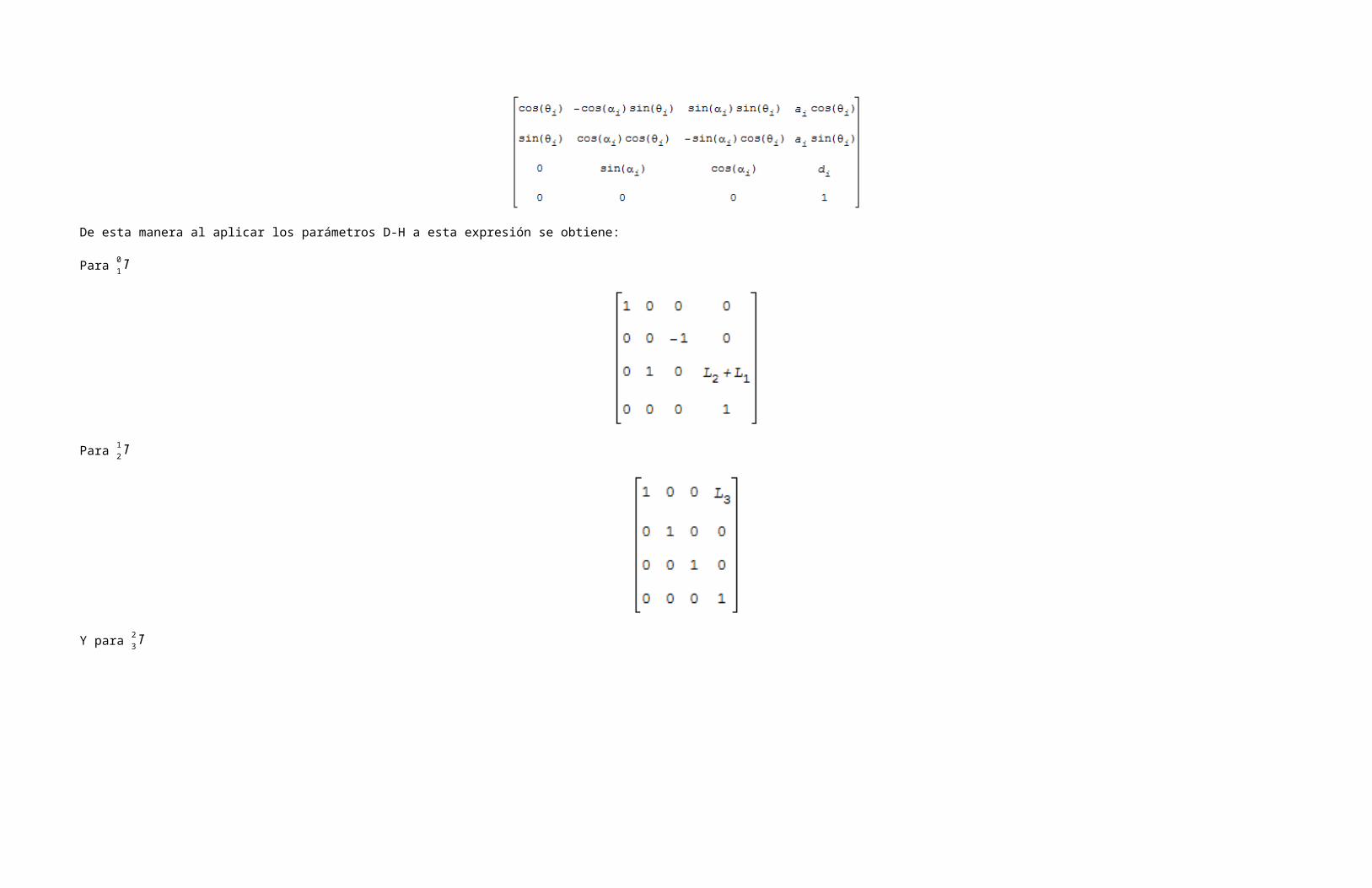
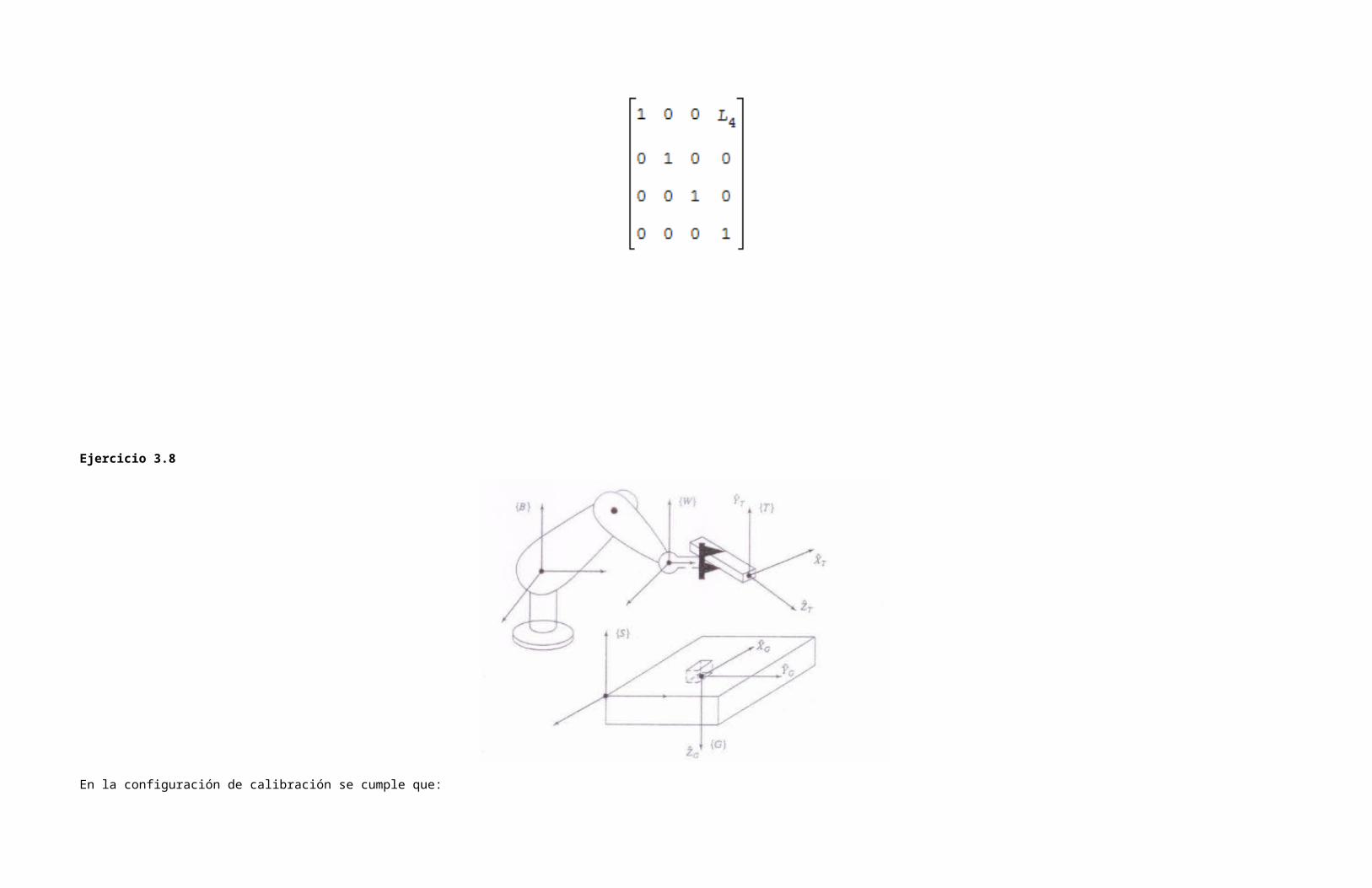
Y para T32
Ejercicio 3.8
En la configuración de calibración se cumple que:
TTB = TG
B
TWB . TT
W = TSB . TG
S
Ya que {G } y {T } son coincidente. Además como son conocidas TSB y TS
B , y TWB se determina a partir de la información de los sensores y el cálculo de la cinemática correspondiente, se obtiene TT
W invirtiendo la matriz TWB y pre-multiplicando
a la última de las igualdades anteriores:
TTW =( TWB )−1 . TSB . TG
S = TBW . TS
B . TGS
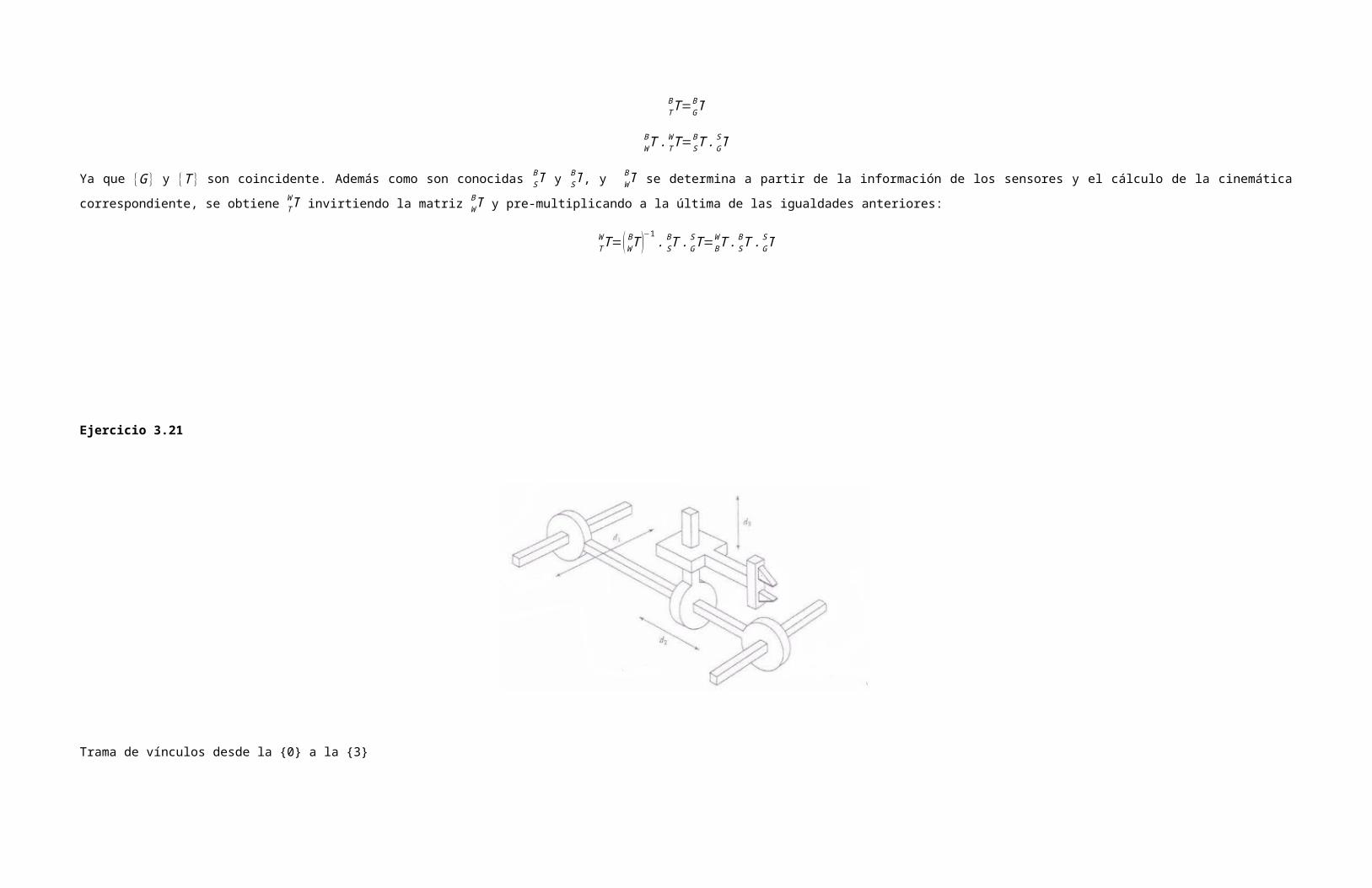
Ejercicio 3.21
Trama de vínculos desde la {0} a la {3}
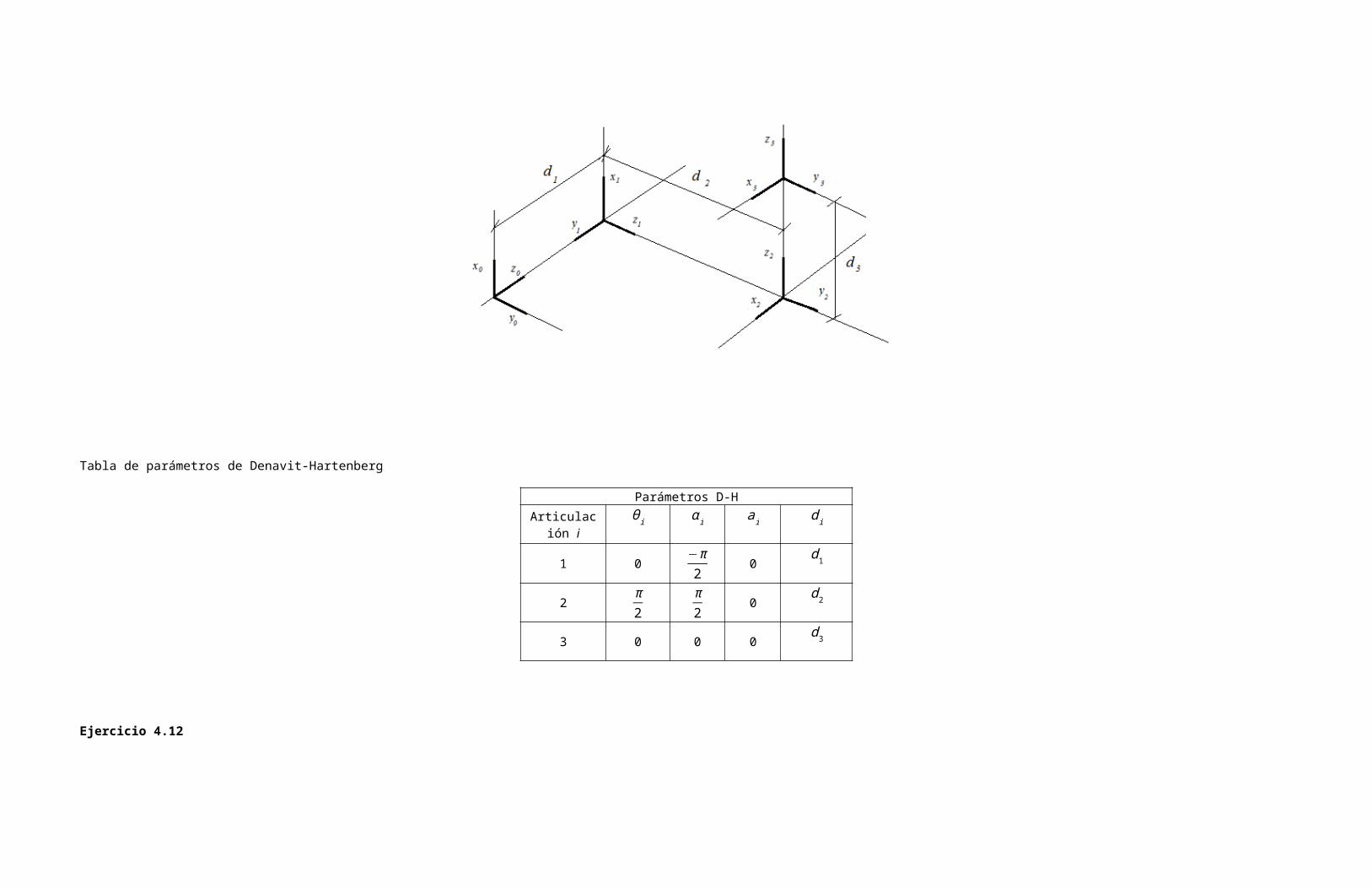
Tabla de parámetros de Denavit-Hartenberg
Parámetros D-H
Articulación iθi α i a i d i
1 0−π2
0d1
2π2
π2
0d2
3 0 0 0d3
Ejercicio 4.12
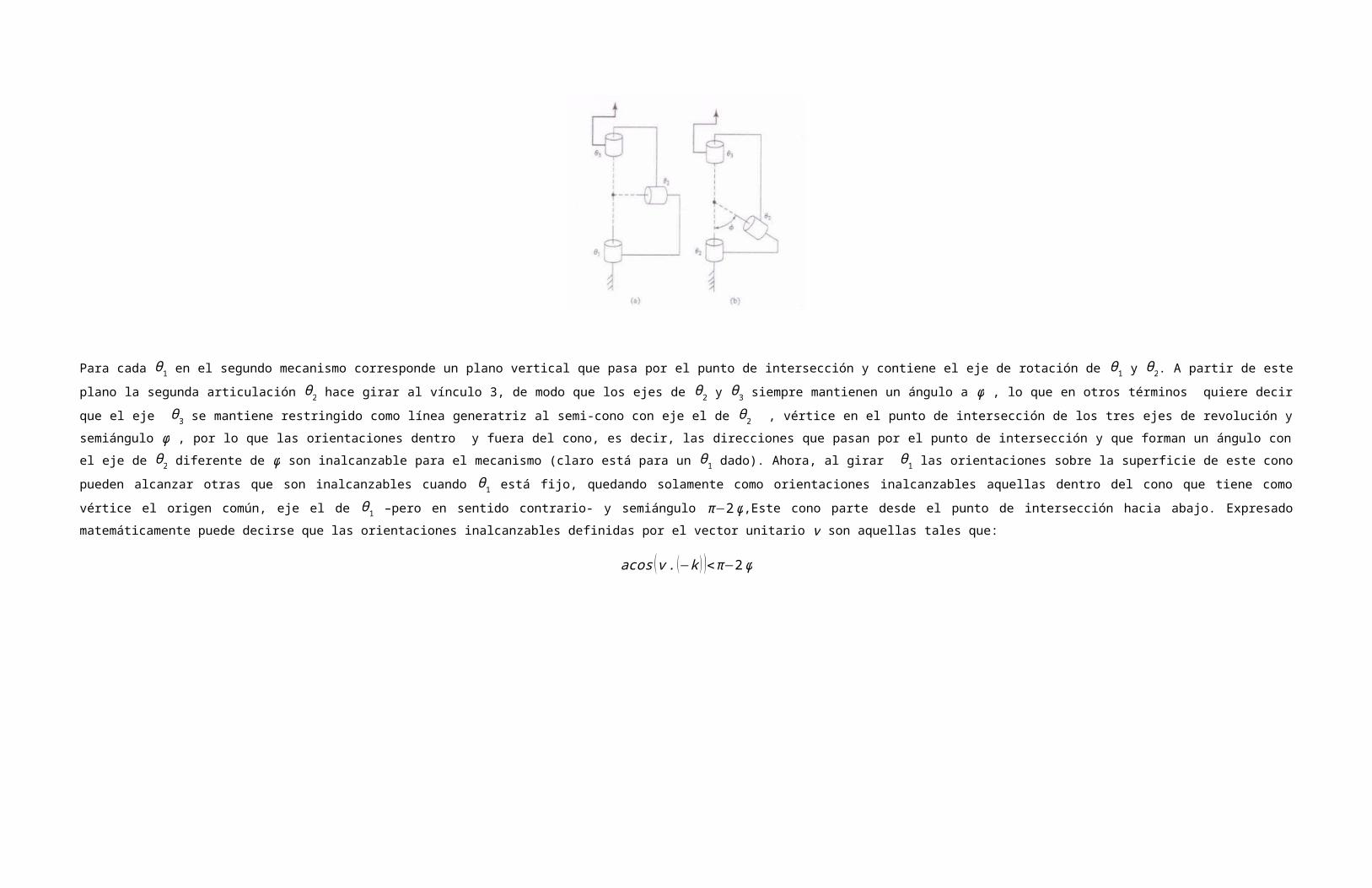
Para cada θ1 en el segundo mecanismo corresponde un plano vertical que pasa por el punto de intersección y contiene el eje de rotación de θ1 y θ2. A partir de este plano la segunda articulación θ2 hace girar al vínculo 3, de modo que los ejes
de θ2 y θ3 siempre mantienen un ángulo a ϕ , lo que en otros términos quiere decir que el eje θ3 se mantiene restringido como línea generatriz al semi-cono con eje el de θ2 , vértice en el punto de intersección de los tres ejes de revolución y
semiángulo ϕ , por lo que las orientaciones dentro y fuera del cono, es decir, las direcciones que pasan por el punto de intersección y que forman un ángulo con el eje de θ2 diferente de ϕ son inalcanzable para el mecanismo (claro está para
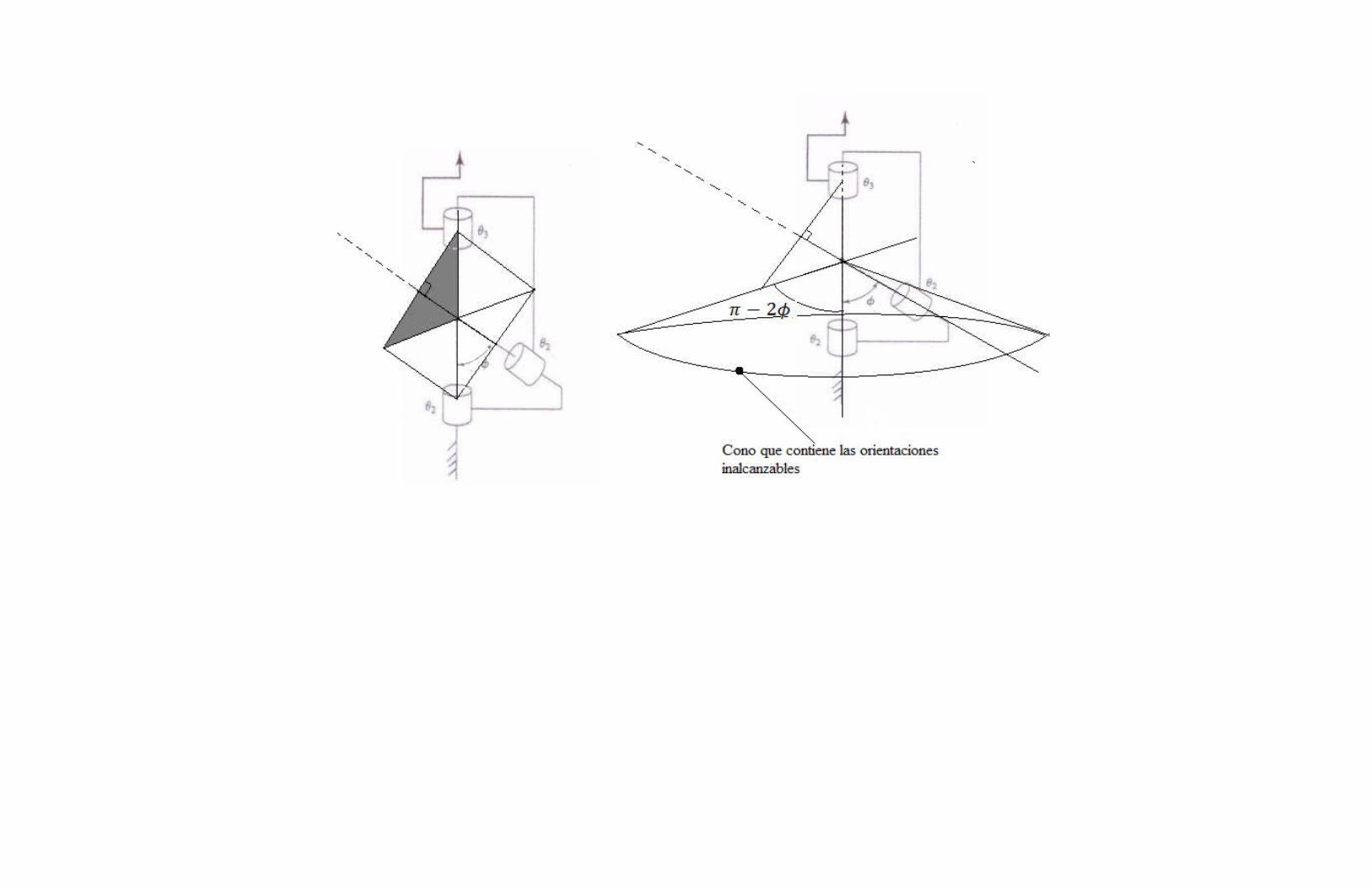
un θ1 dado). Ahora, al girar θ1 las orientaciones sobre la superficie de este cono pueden alcanzar otras que son inalcanzables cuando θ1 está fijo, quedando solamente como orientaciones inalcanzables aquellas dentro del cono que tiene
como vértice el origen común, eje el de θ1 –pero en sentido contrario- y semiángulo π−2ϕ,Este cono parte desde el punto de intersección hacia abajo. Expresado matemáticamente puede decirse que las orientaciones inalcanzables definidas por el vector unitario v son aquellas tales que:
acos (v . (−k ) )<π−2ϕ
Ejercicio 5.2
Parámetros D-H
Articulación iθi α i a i d i
1θ1 π
2L1 0
2θ2 0
L2 0
3 θ3 0 0 0
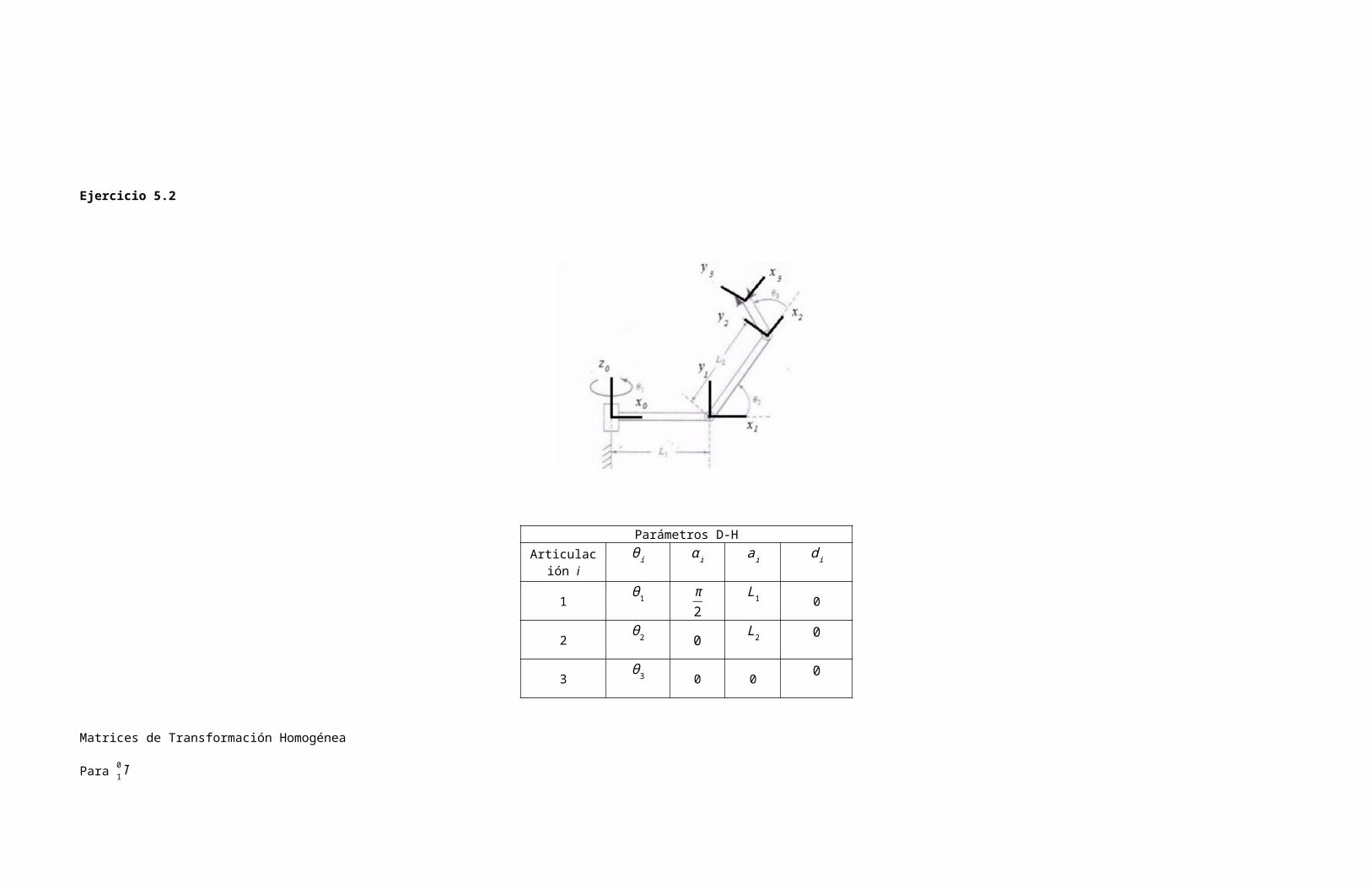
Matrices de Transformación Homogénea
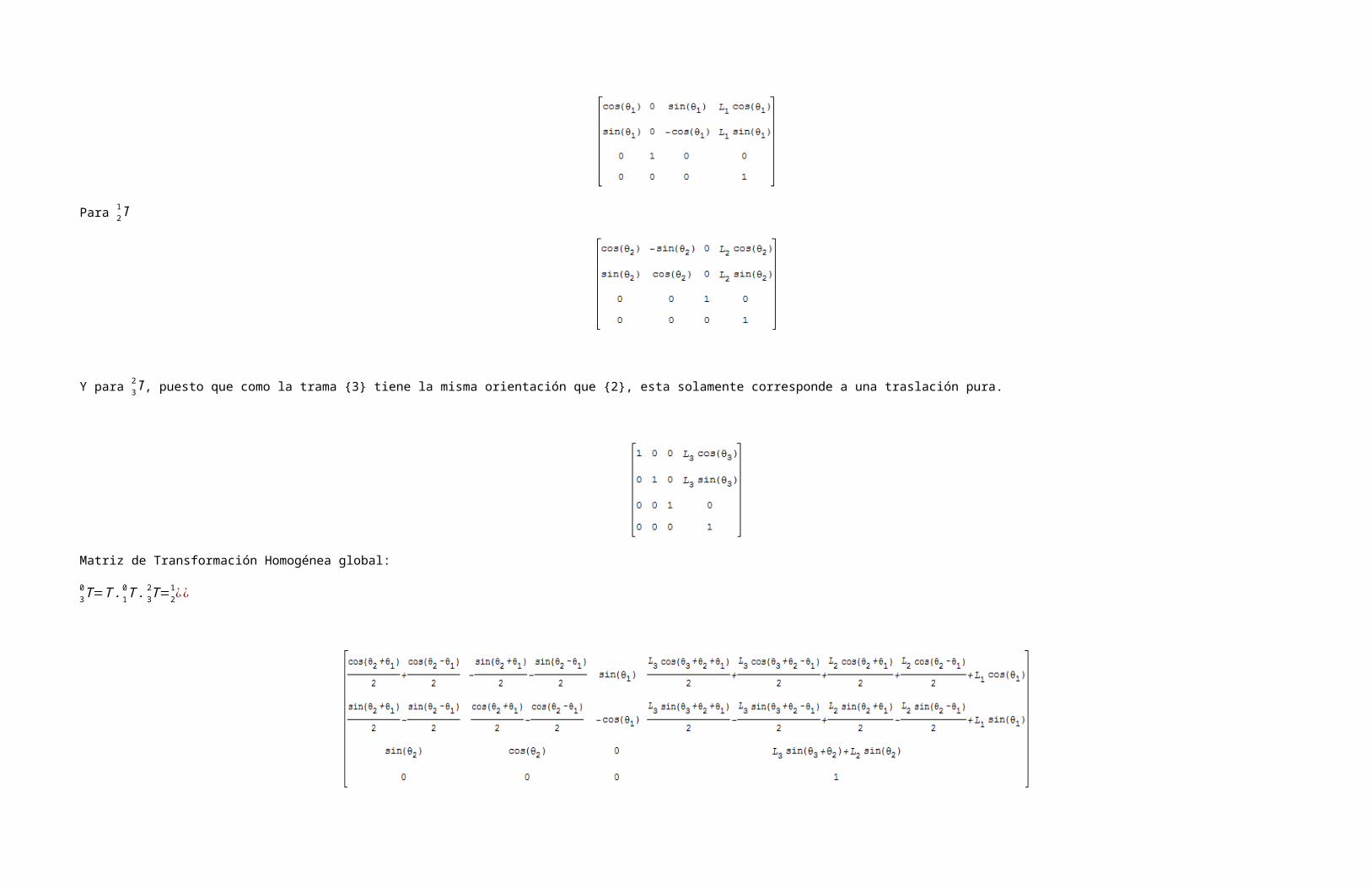
Para T10
Para T21
Y para T32 , puesto que como la trama {3} tiene la misma orientación que {2}, esta solamente corresponde a una traslación pura.
Matriz de Transformación Homogénea global:
T30 =T . T . T3
2 = ¿21
10 ¿
De esta matriz se extraen las siguientes ecuaciones cinemáticas para la posición de la punta de la herramienta (extrayendo la cuarta columna de la fila 1 hasta la 3 de T30 )
px=L3 cos (θ1+θ2+θ3 )
2+L3 cos (−θ1+θ2+θ3 )
2+L2cos (θ1+θ2 )
2+L2 cos (−θ1+θ2)
2+L1 cos (θ1 )
py=L3 sin (θ1+θ2+θ3 )
2−L3sin (−θ1+θ2+θ3 )
2+L2 sin (θ1+θ2 )
2+L2 sin (−θ1+θ2 )
2+L1sin (θ1)
pz=L2 sin (θ2 )+L3sin (θ2+θ3 )
Derivando se obtienen las correspondientes componentes de velocidades
vx=(−L3 sin (θ1+θ2+θ3 )2
+L3sin (−θ1+θ2+θ3 )
2−L2sin (θ1+θ2 )
2+L2sin (−θ1+θ2)
2−L1 sin (θ1 )) θ1+¿
v y=( L3 cos (θ1+θ2+θ3 )2
+L3cos (−θ1+θ2+θ3 )
2+L2cos (θ1+θ2 )
2+L2 cos (−θ1+θ2 )
2+L1cos (θ1 ))θ1+( L3cos (θ1+θ2+θ3 )
2+L3 cos (−θ1+θ2+θ3 )
2+L2 cos (θ1+θ2 )
2−L2 cos (−θ1+θ2 )
2 )θ2+(L3 cos (θ1+θ2+θ3 )2
−L3cos (−θ1+θ2+θ3 )
2 ) θ3vz=(L3 cos (θ2+θ3 )+L2 cos (θ2) )θ2+ L3cos (θ2+θ3 ) θ3
En forma matricial se obtiene:
[ vxv yvz ]=¿
Las velocidades angulares se obtienen a partir de la sub-matriz de rotación R
De la cual se obtiene la matriz anti-simétrica,
Ω=[ 0 −ωz ωyωz 0 −ωx
−ω y ωx 0 ]=R RT
Que define el vector velocidad angular como su vector axial ω=[ωx ,ω y ,ωz]T
Derivando R con respecto al tiempo se obtiene:
R=[(sin (θ1+θ2)−sin (θ2−θ1)
2 ) θ1+(−sin (θ1+θ2)+sin (θ2−θ1)2 )θ2 (−cos (θ1+θ2 )−cos (θ2−θ1 )
2 ) θ1+(−cos (θ1+θ2 )+cos (θ2−θ1 ) 2 )θ2 θ1 cos (θ1)
( cos (θ1+θ2 )+cos (θ2−θ1 ) 2 )θ1+( cos (θ1+θ2)−cos (θ2−θ1 )
2 )θ2 (−sin (θ1+θ2 )+sin (θ2−θ1)2 )θ1+(−sin (θ1+θ2 )−sin (θ2−θ1)
2 )θ2 θ1sin (θ1)
θ2cos (θ2) −θ2sin(θ2) 0]
La transpuesta de R es:
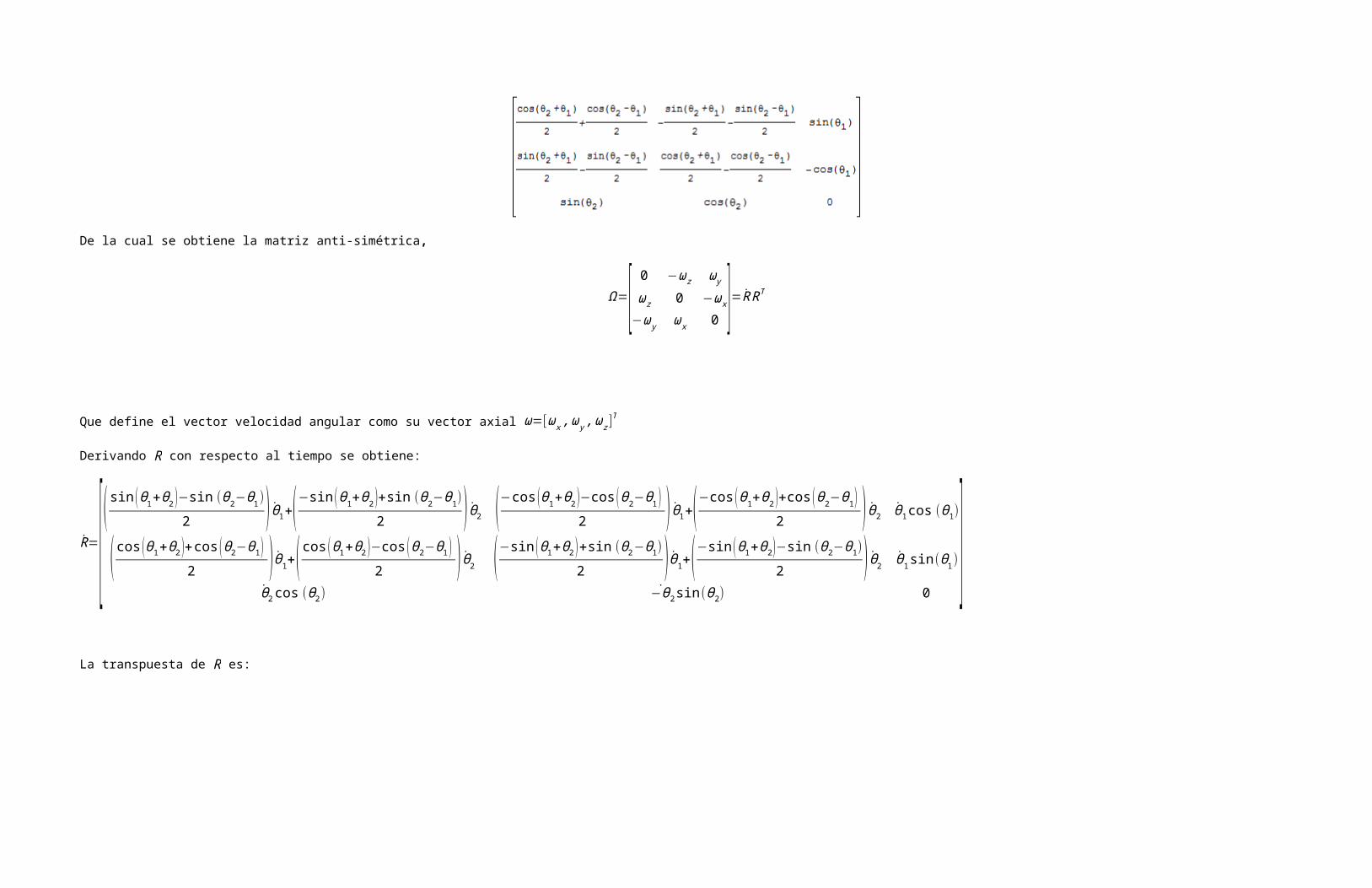
RT=[ cos (θ1+θ2 )+cos (θ2−θ1 ) 2 ( sin (θ1+θ2 )−sin (θ2−θ1)
2 ) sin(θ2)
(−sin (θ1+θ2 )+sin (θ2−θ1)2 ) ( cos (θ1+θ2 )−cos (θ2−θ1 )
2 ) cos (θ2)
sin (θ1) −cos (θ1) 0]
Por tanto
Ω=R RT=[ 0 −θ1 −θ2 cos (θ1)θ1 0 −θ2 sin(θ1)
θ2 cos (θ1) θ2sin (θ1) 0 ]=[ 0 −ωz ω y
ωz 0 −ωx−ωy ωx 0 ]
Y de aquí que las componentes del vector de velocidad angular son:
ωx=θ2sin(θ1)
ω y=−θ2 cos (θ1)
ωz=θ1
En forma matricial
[ωxω y
ωz]=[0 sin(θ1) 00 −cos (θ1) 01 0 0 ][
θ1θ2θ3
]Combinando las ecuaciones matriciales para ω y v se obtiene:
[ vxv yvz ]=¿
[vxv yv zωxωyωz
]=¿
Donde la matriz jacobiana J es:
J=¿
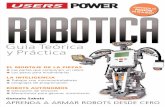
Ejercicio 4.9
De acuerdo con las relaciones entre las longitudes de los vínculos y los rangos de los ángulos se obtiene el área de trabajo alcanzada como se muestra en la siguiente figura: