Robótica aplicada con labview y lego -...
28
Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar
Transcript of Robótica aplicada con labview y lego -...
Robótica aplicada con labview y lego
Pedro Ponce Cruz
Víctor M. de la Cueva Hernández
Hiram Ponce Espinosa
Selecciona la imagen para entrar

Capítulo 1
Introducción a la robótica
Continuar
Introducción
Los sistemas robóticos se encuentran dentro del desarrollo
tecnológico enfocándose esencialmente en el diseño, construcción,
implementación, comercialización y aplicación de robots. Con ello se
busca obtener máquinas automáticas que permitan tomar decisiones
en los campos industrial, de la medicina, aeroespacial y biotecnológico,
entre muchos otros donde es posible que los trabajos sean peligrosos
o rutinarios para las personas.
¿Qué es un robot?
Un robot es un dispositivo electromecánico capaz de interactuar en un
medio sujeto a las leyes físicas, el cual incluye un sistema de sensores y
un sistema de actuadores, que en conjunto son regulados a través de
una unidad de control El objetivo principal de un robot es la
realización de tareas mediante ejecuciones de movimiento dentro del
medio. Para realizar las distintas tareas que se les asignan, los robots
deben contar con un diseño mecánico único y adaptado a las
necesidades o requerimientos.

Unidad de control
La unidad de control de un robot consta de hardware especializado,
como microprocesadores, y de software que incluye la lógica de
programación (algoritmos) junto con las reglas de decisión.

Componentes básicos de un robot
Un robot cuenta con cuatro componentes básicos que en conjunto le
permiten alcanzar el objetivo de las tareas especificadas. Los cuatros
componentes básicos son: sistema de sensores, sistema de actuadores,
sistema de control y estructura mecánica.
Sensores
Un sensor es un dispositivo capaz de medir cantidades físicas y
expresar esa información en una señal que pueda ser leída o
interpretada por otro dispositivo. La mayoría de los sensores actuales y
los utilizados en las aplicaciones robóticas, expresan las mediciones
mediante señales eléctricas.

Rango
Es el intervalo de medición del sensor, determinado por el valor más
pequeño de la cantidad física a medir y el valor más grande que puede
ser medido.
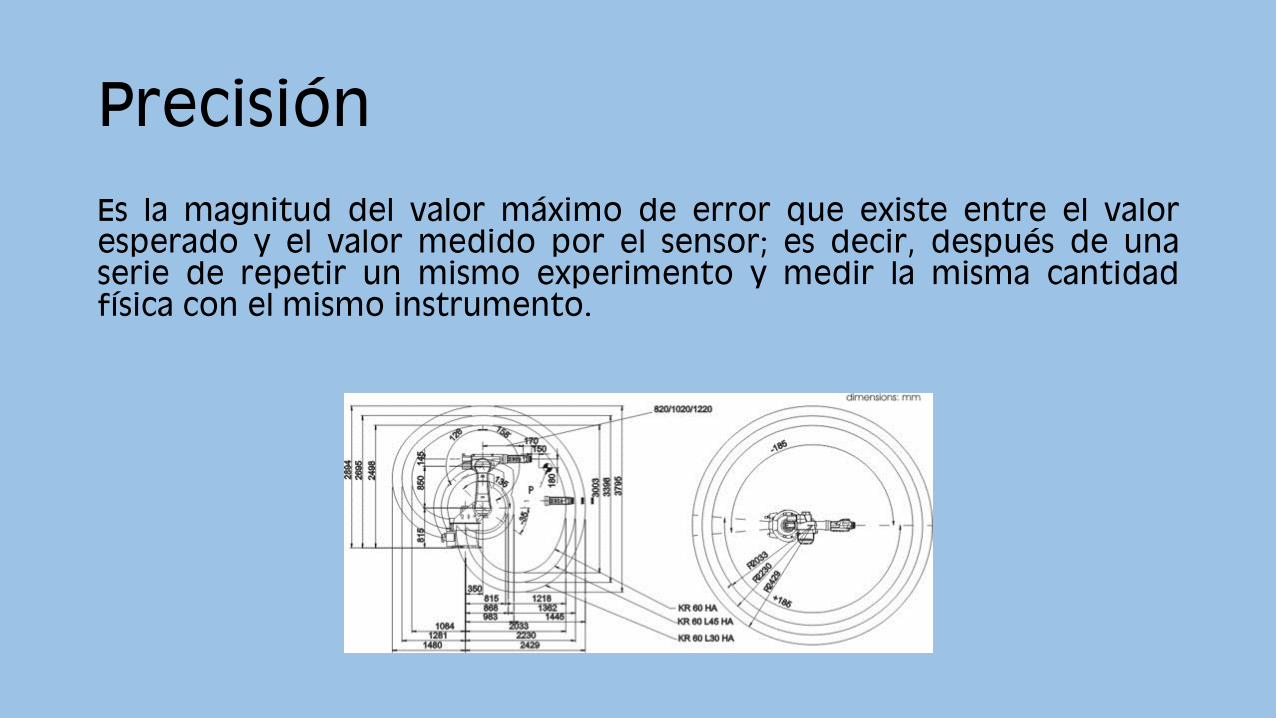
Precisión
Es la magnitud del valor máximo de error que existe entre el valor
esperado y el valor medido por el sensor; es decir, después de una
serie de repetir un mismo experimento y medir la misma cantidad
física con el mismo instrumento.

Linealidad
Determina la correlación existente entre el valor medido de la cantidad
física y el valor de interpretación o codificación del sensor.
Resolución
Valor mínimo de la magnitud de variación que puede ser medido.
Rapidez
Determina qué tan rápido o qué tan lento puede medir los cambios de
valor en la cantidad física.
Señal de salida
Es el tipo de señal que se entrega una vez que se ha medido el valor de
la cantidad física. Existen las señales de salida analógicas y las digitales.

Sensores resistivos
Basados en la resistividad eléctrica, los sensores de este tipo miden
cantidades físicas que de manera directa o indirecta afectan la
resistencia de algún componente resistivo.

Sensores capacitivos
Basados en la medida del cambio de la capacitancia sufrida por un
capacitor cuando un objeto está expuesto de manera cercana a éste,
los sensores capacitivos permiten medir presencia, posición,
aceleración, presión, nivel de líquidos, entre otros.

Sensores inductivos
Este tipo de sensores están basados en la variación de la reluctancia en
materiales inductivos; por lo que son buenos sensores para
aplicaciones como detección de presencia, determinación de posición,
contadores de piezas, finales de carrera, entre otros.
Sensores piezoeléctricos
Este tipo de sensores están basados en el efecto piezoeléctrico de
algunos materiales; lo cual permite relacionar algunas cantidades
físicas como la fuerza con respecto al material piezoeléctrico del
sensor y así producir una medición.
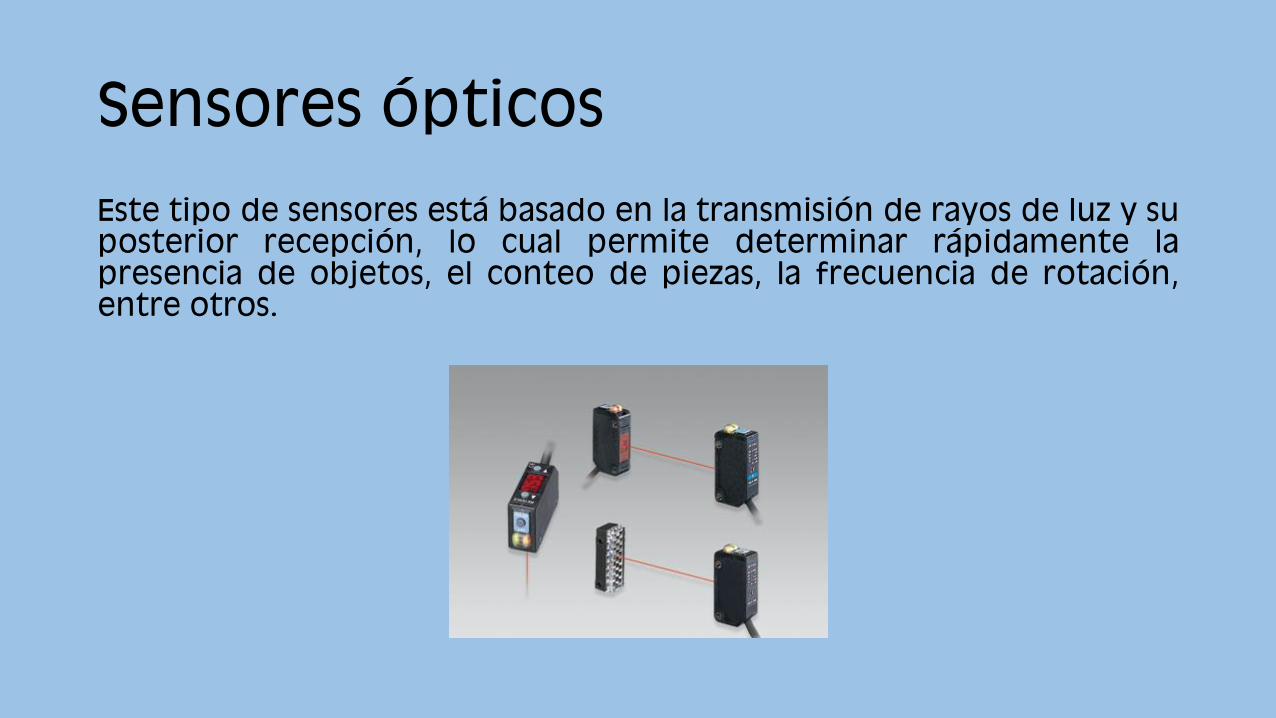
Sensores ópticos
Este tipo de sensores está basado en la transmisión de rayos de luz y su
posterior recepción, lo cual permite determinar rápidamente la
presencia de objetos, el conteo de piezas, la frecuencia de rotación,
entre otros.
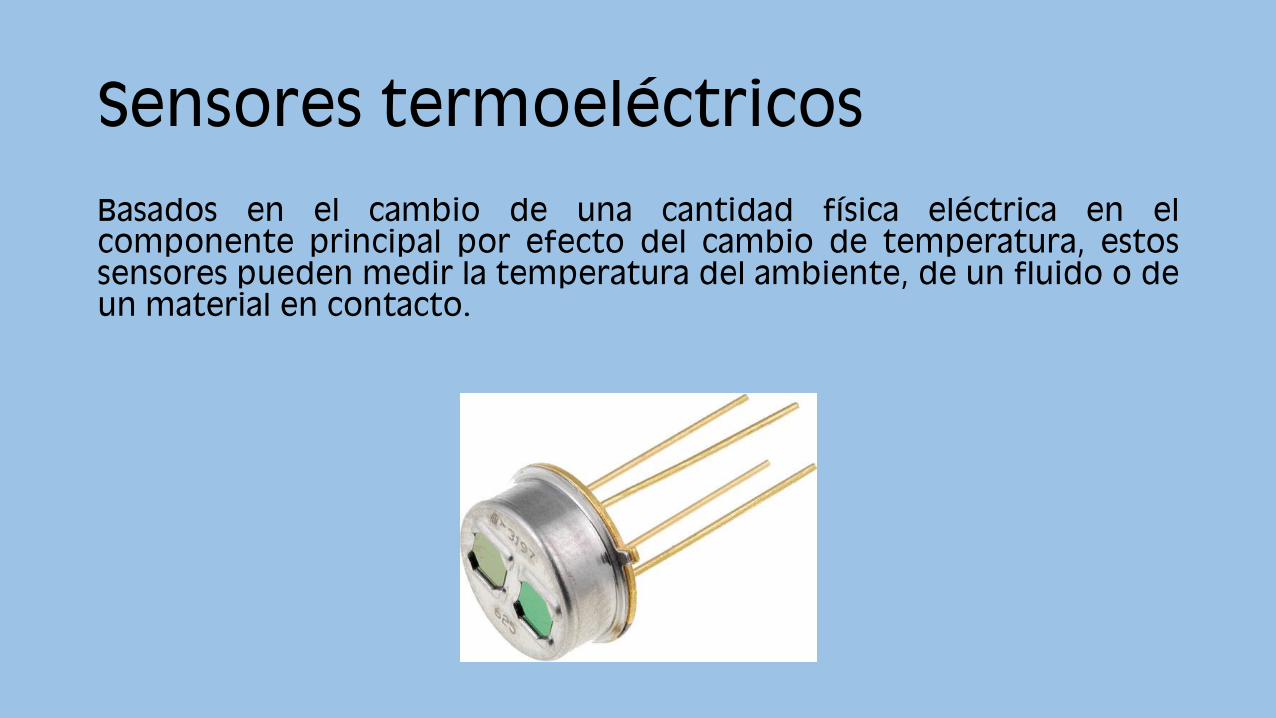
Sensores termoeléctricos
Basados en el cambio de una cantidad física eléctrica en el
componente principal por efecto del cambio de temperatura, estos
sensores pueden medir la temperatura del ambiente, de un fluido o de
un material en contacto.
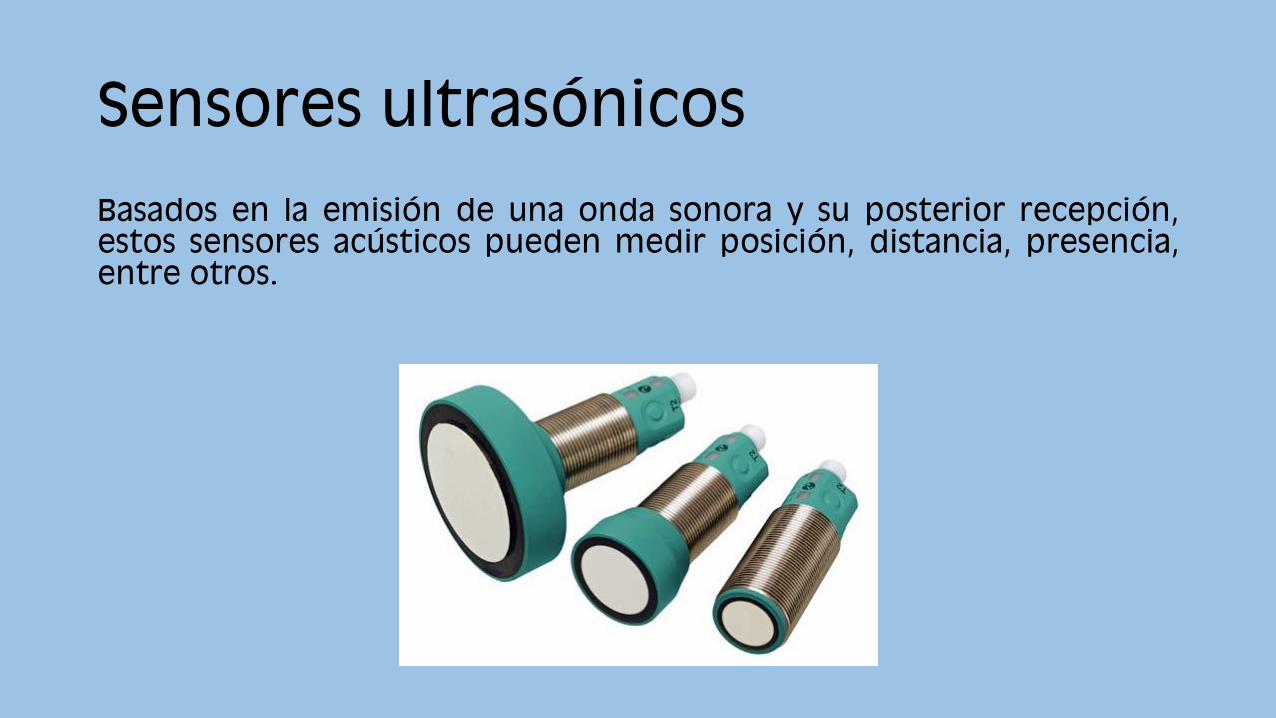
Sensores ultrasónicos
Basados en la emisión de una onda sonora y su posterior recepción,
estos sensores acústicos pueden medir posición, distancia, presencia,
entre otros.
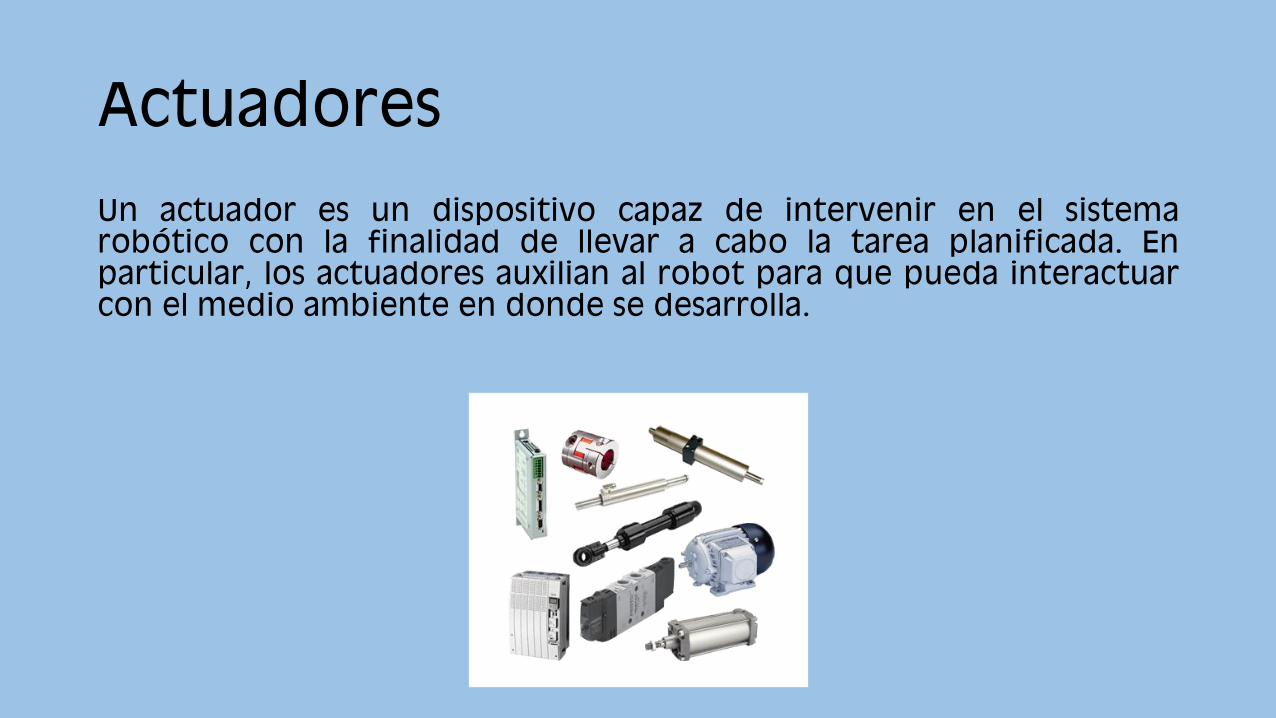
Actuadores
Un actuador es un dispositivo capaz de intervenir en el sistema
robótico con la finalidad de llevar a cabo la tarea planificada. En
particular, los actuadores auxilian al robot para que pueda interactuar
con el medio ambiente en donde se desarrolla.

Actuadores eléctricos
Los actuadores eléctricos más comunes en el ámbito de la robótica son
los relevadores, los opto acopladores y los motores eléctricos.
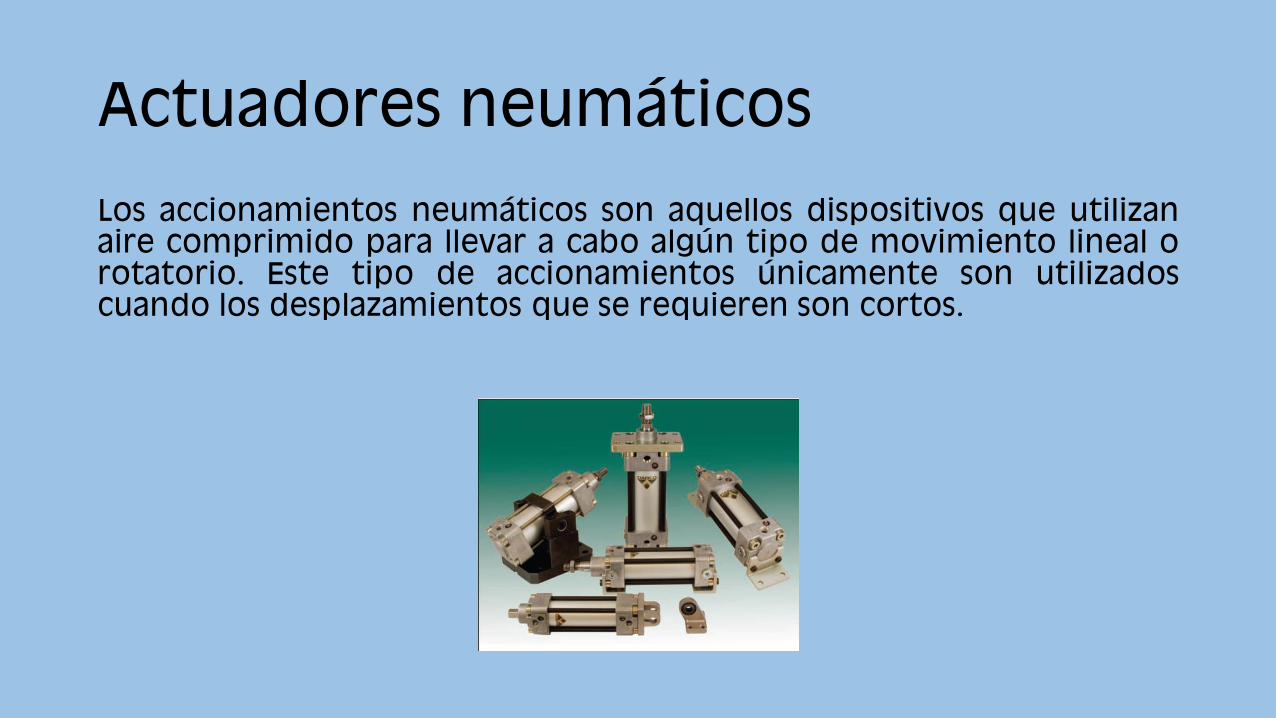
Actuadores neumáticos
Los accionamientos neumáticos son aquellos dispositivos que utilizan
aire comprimido para llevar a cabo algún tipo de movimiento lineal o
rotatorio. Este tipo de accionamientos únicamente son utilizados
cuando los desplazamientos que se requieren son cortos.

Actuadores hidráulicos
Los accionamiento hidráulicos tienen una operación similar a los
neumáticos. En este caso, el material que se ocupa para producir la
fuerza de empuje en los vástagos es el agua o algún fluido con
propiedades similares.
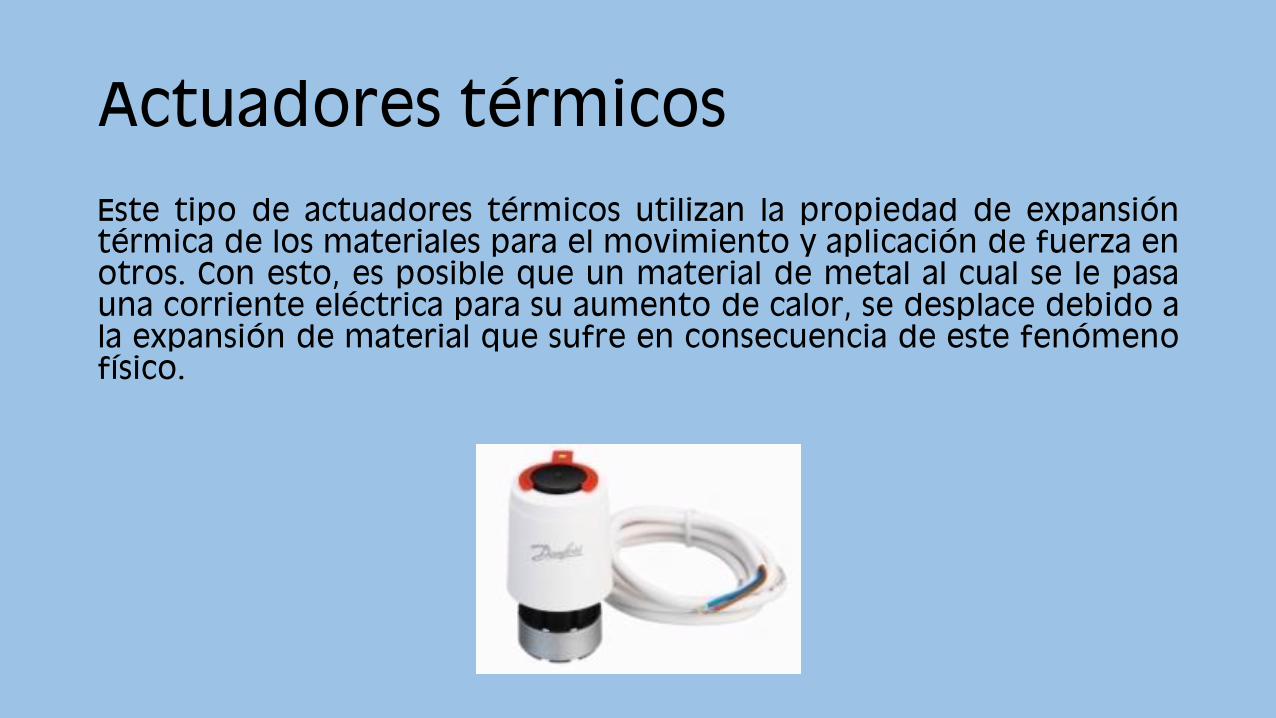
Actuadores térmicos
Este tipo de actuadores térmicos utilizan la propiedad de expansión
térmica de los materiales para el movimiento y aplicación de fuerza en
otros. Con esto, es posible que un material de metal al cual se le pasa
una corriente eléctrica para su aumento de calor, se desplace debido a
la expansión de material que sufre en consecuencia de este fenómeno
físico.
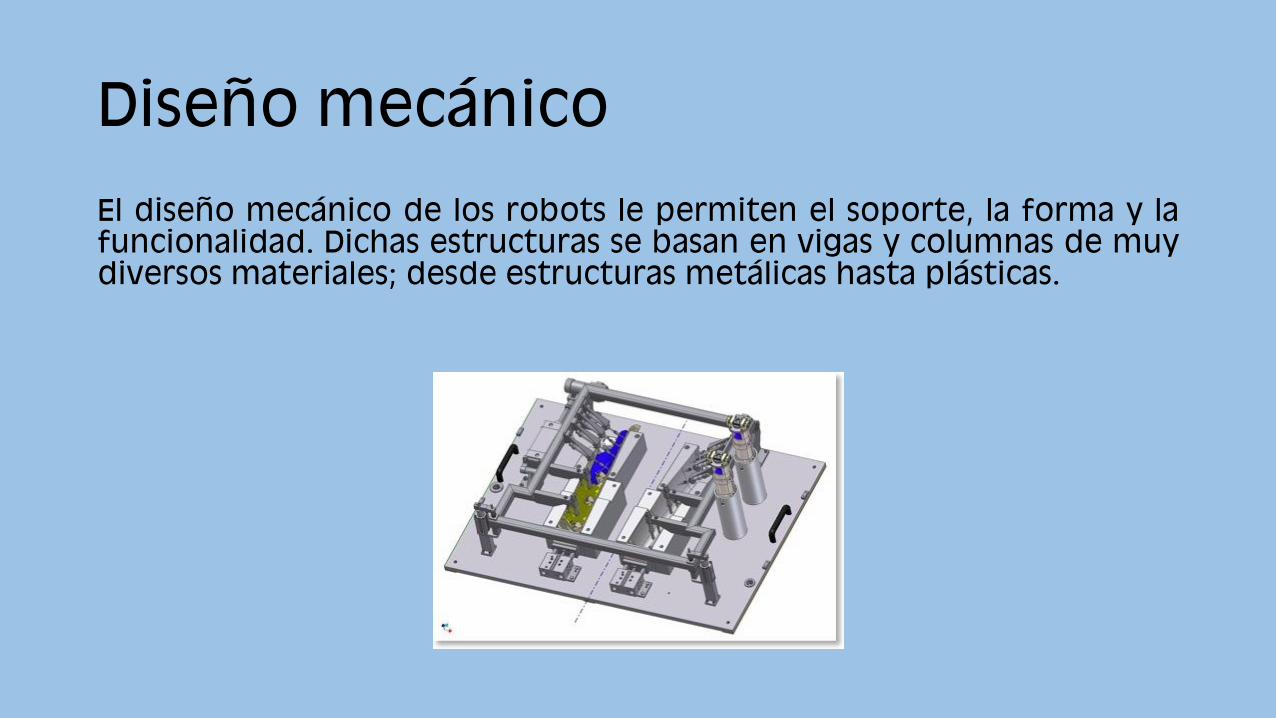
Diseño mecánico
El diseño mecánico de los robots le permiten el soporte, la forma y la
funcionalidad. Dichas estructuras se basan en vigas y columnas de muy
diversos materiales; desde estructuras metálicas hasta plásticas.
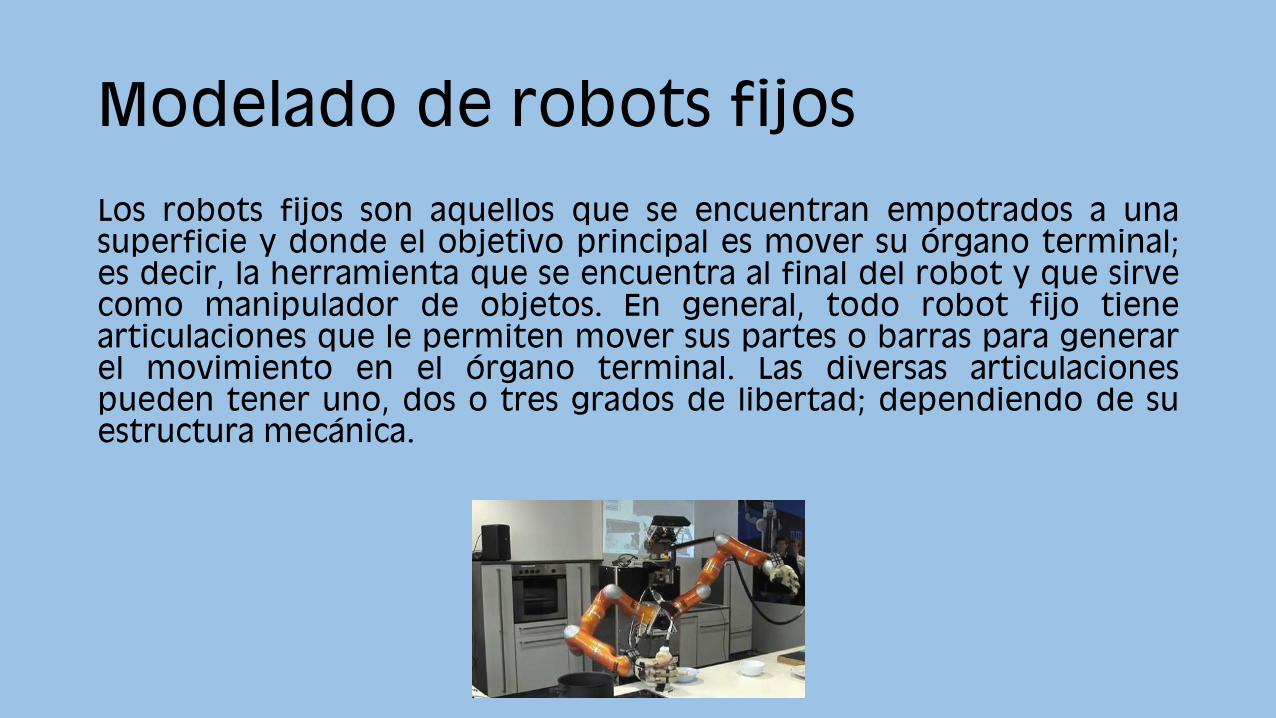
Modelado de robots fijos
Los robots fijos son aquellos que se encuentran empotrados a una
superficie y donde el objetivo principal es mover su órgano terminal;
es decir, la herramienta que se encuentra al final del robot y que sirve
como manipulador de objetos. En general, todo robot fijo tiene
articulaciones que le permiten mover sus partes o barras para generar
el movimiento en el órgano terminal. Las diversas articulaciones
pueden tener uno, dos o tres grados de libertad; dependiendo de su
estructura mecánica.
Modelado de robots móviles
Los robots móviles son aquellos que pueden moverse a través de un
espacio en donde no tienen puntos fijos. Por lo tanto, su objetivo
principal es llevar a cabo el movimiento de todo el robot a través del
espacio. Al igual que en los robots fijos, su estudio se puede llevar a
cabo mediante su modelación.