Robótica Industrial - Clase 02: Sensores y Actuadores para ... · Robótica Industrial Clase 02:...
25
Robótica Industrial Clase 02: Sensores y Actuadores para Robots Industriales, y sus Interfaces de Conexión Ricardo Mendoza Manuel Fuentes [email protected] [email protected] Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile November 18, 2011 R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 1 / 25
Transcript of Robótica Industrial - Clase 02: Sensores y Actuadores para ... · Robótica Industrial Clase 02:...

Robótica IndustrialClase 02: Sensores y Actuadores para Robots Industriales,
y sus Interfaces de Conexión
Ricardo Mendoza Manuel [email protected] [email protected]
Escuela Universitaria de Ingeniería MecánicaUniversidad de Tarapacá
Arica, Chile
November 18, 2011
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 1 / 25

Outline
Outline
1 Componentes de Robots Industriales
2 Sensores
3 Actuadores
4 Interfaces de conexión
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 2 / 25

Componentes de Robots Industriales
Outline
1 Componentes de Robots Industriales
2 Sensores
3 Actuadores
4 Interfaces de conexión
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 3 / 25

Componentes de Robots Industriales
Controlador
es el cerebro;provee interfaz de conexión; yprovee interfaz de control (joystick) yprogramación.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 4 / 25

Componentes de Robots Industriales
Brazo
posiciona el actuador final.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 5 / 25

Componentes de Robots Industriales
Actuador final (end effector)
permite ejercer acciones en elentorno;puede ser pinza de agarre, bombade vacío, imán, soldadora, etc.; yalgunos se pueden cambiar sinasistencia humana.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 6 / 25

Componentes de Robots Industriales
Sensores
permiten recibir información delentorno; ypueden ser sensores de proximidad,cámaras de visión artificial, etc.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 7 / 25

Componentes de Robots Industriales
Conductor (drive)
energiza mecanismos de rotaciónde los ejes;puede ser hidráulico, neumático, oeléctrico.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 8 / 25

Sensores
Outline
1 Componentes de Robots Industriales
2 Sensores
3 Actuadores
4 Interfaces de conexión
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 9 / 25

Sensores
Fuerza y torque (six-axis)
fx, fy, fz;tx, ty, tz;provee 6 salidas análogas; o1 salida serial, e.g., RS-232.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 10 / 25
Sensores
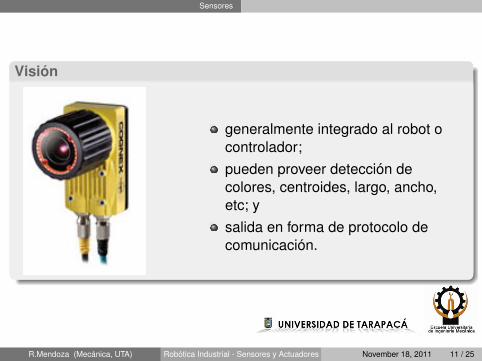
Visión
generalmente integrado al robot ocontrolador;pueden proveer detección decolores, centroides, largo, ancho,etc; ysalida en forma de protocolo decomunicación.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 11 / 25

Sensores
Proximidad-distancia (láser)
salida RS232;análoga 0-20mA.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 12 / 25
Sensores
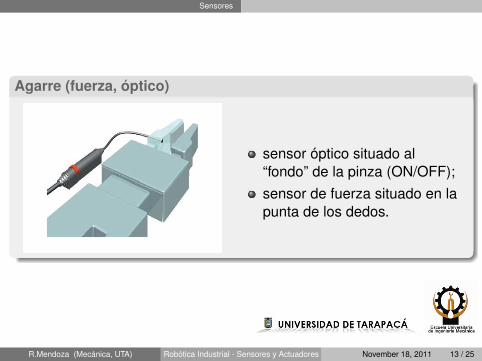
Agarre (fuerza, óptico)
sensor óptico situado al“fondo” de la pinza (ON/OFF);sensor de fuerza situado en lapunta de los dedos.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 13 / 25

Actuadores
Outline
1 Componentes de Robots Industriales
2 Sensores
3 Actuadores
4 Interfaces de conexión
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 14 / 25

Actuadores
Pinzas (gripper)
neumáticos, hidráulicos, oeléctricos;controladas por ordenes digitales(ON/OFF).
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 15 / 25

Actuadores
Ventosas (vacío)
neumáticas;controladas por ordenesdigitales (ON/OFF).
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 16 / 25

Actuadores
Soldadora
controladas por ordenesdigitales (ON/OFF); ocontroladas por protocolos decomunicación (Ethernet).
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 17 / 25

Actuadores
Herramientas de desbarbado
neumáticas o eléctricas;controladas por orden digital(ON/OFF).
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 18 / 25

Actuadores
Cambiadores automáticos de herramientas
propagan señaleseléctricas, neumáticas, ohidráulicas;desconectadas pororden digital (ON/OFF).
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 19 / 25

Interfaces de conexión
Outline
1 Componentes de Robots Industriales
2 Sensores
3 Actuadores
4 Interfaces de conexión
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 20 / 25
Interfaces de conexión
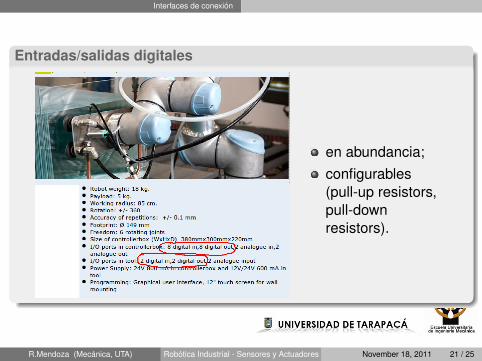
Entradas/salidas digitales
en abundancia;configurables(pull-up resistors,pull-downresistors).
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 21 / 25
Interfaces de conexión
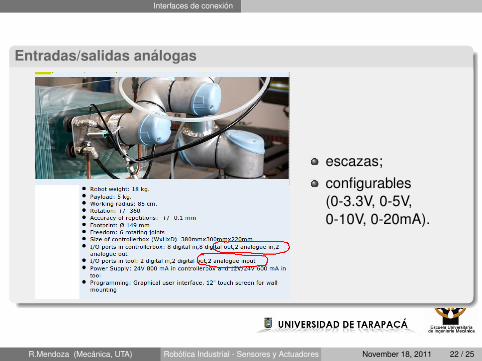
Entradas/salidas análogas
escazas;configurables(0-3.3V, 0-5V,0-10V, 0-20mA).
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 22 / 25

Interfaces de conexión
Interfaces de comunicación
CANbus;RS-485;RS-232 (e.g., sensor de fuerzatorque);Ethernet;etc.
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 23 / 25

Interfaces de conexión
Consideraciones de conexión - I
Tomado de la hoja de datos del CRS-A465
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 24 / 25
Interfaces de conexión
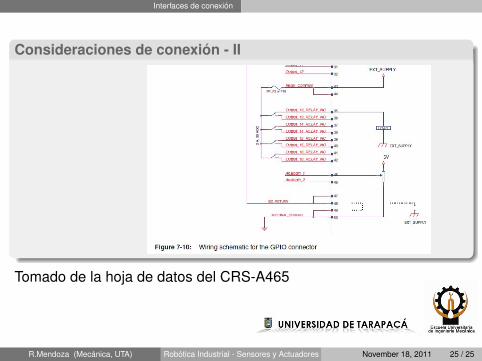
Consideraciones de conexión - II
Tomado de la hoja de datos del CRS-A465
R.Mendoza (Mecánica, UTA) Robótica Industrial - Sensores y Actuadores November 18, 2011 25 / 25