Robótica Tema 3. Introducción al Modelo Cinemá · PDF fileFundamentos de...

If you can't read please download the document
Transcript of Robótica Tema 3. Introducción al Modelo Cinemá · PDF fileFundamentos de...
19/04/2017
1
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
1
Titulacin:Grado enIngenieraElectrnicayAutomtica
rea:IngenieradeSistemasyAutomticaDepartamento deElectrnicaAutomticaeInformticaIndustrial
UNIVERSIDADPOLITCNICADEMADRIDE.T.S.deIngenierayDiseoIndustrial
RobticaTema3.IntroduccinalModeloCinemtico
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo CinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
2
Objetivos
1. Conocerlosdistintossistemasdelocalizacinespacial.2. Familiarizarseconlasoperacionesmatricialesnecesariaspara
modelarcinemticamente unrobot.3. Conocerlanomenclaturautilizadaenrobticaparalalocalizacine
espacial.
19/04/2017
2
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo CinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
3
Contenido3.1 Introduccin al modelo cinemtico3.2 Representacin de la orientacin3.3 Matrices de Transformacin Homognea.3.4 Composicin de transformaciones.3.5 Ejemplos y problemas
Bibliografa recomendada:FundamentosdeRobtica.(2Edicin)BarrientosA,Pein L.F.,BalaguerC.,Aracil R.Ed.McGrawHill1997.ISBN:8426713130
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
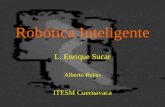
JustificacinManipulacin
de piezas
Localizacin del extremo y
de la pieza
Descripcin matemtica de la
localizacin
3.1IntroduccinalmodeloCinemtico
19/04/2017
3
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
5
3.1IntroduccinalmodeloCinemtico
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
6
Justificacin
3.1IntroduccinalmodeloCinemtico
19/04/2017
4
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
7
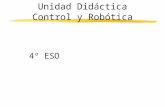
A BTomaunaplanchademetaldelpalet.B C,Ajustaelefectorfinal.C D,Ponelaplanchaenlaprensa.D E,Doblalaplancha.E F,Lasitaenelcontenedor.F G,Cogelaplanchaporelladocontrario.G H,Lallevaalaprensa.H I,Doblalaplancha.I J,Sitalaplanchaenelpalet.
3.1IntroduccinalmodeloCinemtico
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
8
Operacionestpicasquerequierendelmodelo
3.1IntroduccinalmodeloCinemtico
Katib: curso Stanford
19/04/2017
5
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
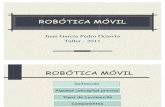
Representacindelaposicin
Vectordeposicin
2D Cartesianas ypolares
3D Cartesianas,cilndricayesfericas
3.1IntroduccinalmodeloCinemtico
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
Ejes perpendiculares con origen definido
2DOY
OX3D
OXOYOZ
vector p(x,y)
Coordenadas cartesianas
vector p(x,y,z)
Coordenadas cartesianas
Representacindelaposicin(II)CoordenadasCartesianas
3.1IntroduccinalmodeloCinemtico
19/04/2017
6
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
MatricesdeRotacin2D
El punto p se puede describir en el sistema OXY o en el sistema OUV
v
u
y
xpp
pp
R
vyuy
vxux
jjijjiii
R
3.2RepresentacindelaOrientacin
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
ParticularidadesdelasmatricesRMatricesdeorientacin
R MatrizderotacinoMatrizdecosenosdirectores
R esortonormal > TRR 1
R esunamatrizcolumna
IR 0
3.2RepresentacindelaOrientacin
19/04/2017
7
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
Matricesderotacin3D
Elpuntop sepuededescribirenelsistemaOXYZ oenelsistemaOUVW
LaspropiedadesdeR vistaspara2Dseconservanen3D
3.2RepresentacindelaOrientacin
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
MatricesBsicas(I)Matricesderotacin3D
3.2RepresentacindelaOrientacin
19/04/2017
8
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
, ,, ,, zyx RRR MatricesBASICASderotacin
MatricesBsicas(II)Matricesderotacin3D
3.2RepresentacindelaOrientacin
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
Lasmatricesderotacinpuedencomponerseparaexpresarlaaplicacincontinuadevariasrotaciones:
Rotacin enOX
Rotacin enOY
Rotacin enOZ
ComposicinderotacionesMatricesderotacin3D
3.2RepresentacindelaOrientacin
19/04/2017
9
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
ngulosdeEulerDefinicin:TodosistemaOUVWmvil,puededefinirseconrespectoalsistemaOXYZinercialatravsdetresngulos,,,denominadosngulosdeEuler .
Esunadelasrepresentacionesmshabitualesentrelasquerealizanlosgirossobreejespreviamentegirados.Selesueleasociarconlosmovimientosbsicosdeungirscopo.SisepartedelossistemasOXYZyOUVW,inicialmentecoincidentes,sepuedecolocaralsistemaOUVWencualquierorientacinsiguiendolossiguientespasos.
ngulosdeEuler ZXZ(313)
3.2RepresentacindelaOrientacin
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
Angulos deEuler ZXZ(313)(cont.)
1. GirarOUVWunngulo conrespectoalejeOZ OUVW.
2. GirarOUVWunngulo conrespectoalejeOU,convirtindoseasenelOUVW.
3. GirarelsistemaOUVWunngulo conrespectoalejeOWconvirtindosefinalmenteenelOUVW.
3.2RepresentacindelaOrientacin
ngulosdeEuler
19/04/2017
10
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
Angulos deEuler XYZ Roll,Pitch,YawSetratadelarepresentacinutilizadageneralmenteenaeronutica.
EstambinlamshabitualdeentrelasqueseaplicanalosgirossobrelosejesdelsistemafijodenominndoseentoncescomongulosdeCardan.
1. GirarelsistemaOUVWunnguloconrespectoalejeOZ.EseldenominadoYaw oguiada.
2. GirarelsistemaOUVWunngulo conrespectoalejeOV.EseldenominadoPitch ocabeceo.
3. GirarelsistemaOUVWunngulo conrespectoalejeOU.EseldenominadoRolloalabeo.
3.2RepresentacindelaOrientacin
ngulosdeEuler
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
20
19/04/2017
11
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
Angulos deEuler XYZ Roll,Pitch,YawVistodesdeelpuntodevistadelarobtica:
EstambinlamshabitualdeentrelasqueseaplicanalosgirossobrelosejesdelsistemafijodenominndoseentoncescomongulosdeCardan.
1. GirarelsistemaOUVWunngulo conrespectoalejeOX.EseldenominadoRoll.
2. GirarelsistemaOUVWunngulo conrespectoalejeOV.EseldenominadoPitch.
3. GirarelsistemaOUVWunngulo conrespectoalejeOW.EseldenominadoYaw.
3.2RepresentacindelaOrientacin
ngulosdeEuler
1. GirarelsistemaOUVWunngulo conrespectoalejeOZ.EseldenominadoYaw.
2. GirarelsistemaOUVWunngulo conrespectoalejeOY.EseldenominadoPitch.
3. GirarelsistemaOUVWunngulo conrespectoalejeOX.EseldenominadoRoll.
R=Rot(x,roll)Rot(y,pitch)Rot(z,yaw)
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
Otrasrepresentaciones
Parderotacin
Quaternios
zyx kkkk
v,/ 32103210 sQkqjqiqeqqqqqQ
2sin,2cos, kk RotQ
3.2RepresentacindelaOrientacin
19/04/2017
12
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
PardeRotacin
Definicin:LarepresentacindelaorientacindeunsistemaOUVWconrespectoalsistemadereferenciaOXYZtambinpuederealizarsemedianteladefinicindeunvectoryunngulo:
zyx kkkktalqueelsistemaOUVW correspondealsistemaOXYZ giradounngulosobreelejek.Elejek hadepasarporelorigenOdeambossistemas.
Alpar(k,)seledenominaparderotacin yesnico.
cos1sincos, pkpkppkRot
3.3Cuaternios
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
Concepto
ElconjuntoR,C,Q formanuncampo.
SeaC elconjuntodenmeroscomplejostalque:
1
,/2
ibabiaC
Definicin: UncampoF consistedeunconjuntocondosoperaciones(sumayproducto)enelquesedemuestranlaspropiedadesdecerradura,conmutatividad,neutro,asociatividad,inversoydistributividad.
Definicin: Loscuaternios sedefinencomoelconjuntodenmerosdelaforma:
1
,,,/222
IJKKJIdcbadKcJbIaH
3.3Cuaternios
19/04/2017
13
ASIGNATURA:RobticaTEMA:3-Introduccin al modelo cinemticoFECHA:Marzo de 2017Profesores:CeciliaGarca&MiguelHernando
Concepto
i
ii
i0
0
00
0110
KJISi
Se define el cuaternio:
diacibcibdia
hHh /
Este conjunto de cuaternios cumple toda