SANTIAGO BOTERO GÓMEZ -...
91
1 OBOT HEXÁPODO PARA LA DETECCIÓN DE MINAS ANTIPERSONA ARTESANALES TIPO JERINGA SANTIAGO BOTERO GÓMEZ UNIVERSIDAD DE SAN BUENAVENTURA SECCIONAL MEDELLÍN FACULTAD DE INGENIERÍAS INGENIERIA ELECTRONICA MEDELLIN 2013
Transcript of SANTIAGO BOTERO GÓMEZ -...

1
OBOT HEXÁPODO PARA LA DETECCIÓN DE MINAS ANTIPERSONA
ARTESANALES TIPO JERINGA
SANTIAGO BOTERO GÓMEZ
UNIVERSIDAD DE SAN BUENAVENTURA SECCIONAL MEDELLÍN
FACULTAD DE INGENIERÍAS
INGENIERIA ELECTRONICA
MEDELLIN
2013
2
ROBOT HEXÁPODO PARA LA DETECCIÓN DE MINAS ANTIPERSONA
ARTESANALES TIPO JERINGA
SANTIAGO BOTERO GÓMEZ
Proyecto de grado presentado para optar por el título de Ingeniero Electrónico
Asesor
Andrés Mauricio Cárdenas, Ingeniero Electrónico
UNIVERSIDAD DE SAN BUENAVENTURA SECCIONAL MEDELLÍN
FACULTAD DE INGENIERÍAS
INGENIERIA ELECTRONICA
MEDELLIN
2013
3
CONTENIDO
1. JUSTIFICACIÓN .......................................................................................... 6
2. PLANTEAMIENTO DEL PROBLEMA .......................................................... 8
3. OBJETIVO GENERAL .................................................................................. 12
4. OBJETIVOS ESPECIFICOS ...................................................................... 12
5. MARCO REFERENCIAL ............................................................................ 13
5.1 XBEE ....................................................................................................... 13
5.2 MEDICIÓN DE TEMPERATURA DEL SUELO ........................................ 13
5.3 SISTEMA TELEOPERADO ..................................................................... 15
5.4 MECANISMOS CUADRÚPEDOS Y HEXÁPODOS ................................ 15
6. DISENO METODOLOGICO PRELIMINAR ................................................ 16
6.1 METODOLOGIA ...................................................................................... 16
6.1.1 Pruebas experimentales .................................................................... 16
6.1.2 Técnicas y Herramientas ................................................................... 16
6.2 DESCRIPCION DE LA PROPUESTA ..................................................... 16
6.3 PROPOSITO DEL PROYECTO DE GRADO .......................................... 17
6.3.1Robot Hexápodo ................................................................................ 18
6.3.2 Adquisición De Datos ........................................................................ 19
6.3.3 Comunicación inalámbrica ................................................................ 19
6.3.4 Reconocimiento ................................................................................. 20
7. CRONOGRAMA ........................................................................................... 21
8. ROBOT HEXÁPODO PARA LA DETECCIÓN DE MINAS ANTIPERSONA
ARTESANALES TIPO JERINGA ...................................................................... 25
8.1 COMPONENTES ELÉCTRICOS Y ELECTRONICOS ............................ 25
8.1.1 Tarjeta ssc-32 .................................................................................... 25
8.1.2 Joystick análogo ................................................................................ 27
8.1.2.1 Conexión del joystick con un arduino .......................................... 28
8.1.3 Transmisión Inalámbrica con Xbee Serie 2 ....................................... 29
8.1.3.1 Configuración del Maestro .......................................................... 31
4
8.1.3.2 Configuración del esclavo ........................................................... 32
8.1.4 Control remoto ................................................................................... 33
8.2 CAMINAR DEL ROBOT HEXAPODO ..................................................... 34
8.2.1 Giro hacia la derecha o hacia la izquierda ......................................... 35
8.2.2 Diagonal superior izquierda, inferior izquierda, superior derecha a
inferior derecha .......................................................................................... 36
8.3 MEDICION DE LA TEMPERATURA DEL EMBOLO DE LA JERINGA ... 38
8.3.1 MLX90614 ......................................................................................... 38
8.3.1.1 Distribución de los pines ............................................................. 39
8.3.1.1 Campo de visión del sensor MLX90614 ...................................... 40
8.3.1.2 Conexión del sensor MLX90614 con arduino .............................. 41
8.3.1.3 Compensación o factor multiplicativo .......................................... 42
8.4 PRUEBAS CON LOS SENSORES MLX90614 ................................... 44
8.4.1 Primera Prueba ............................................................................. 44
8.4.1.1 Jeringa 1 (En terreno plano y pasto despejado) .......................... 46
8.4.1.2 Jeringa 2 (En terreno plano y hierba gruesa) .............................. 48
8.4.1.3 Jeringa 3 (En terreno irregular con hierba delgada y abundante)
................................................................................................................ 50
8.4.2 Segunda Prueba ........................................................................... 55
8.4.2.1 Prueba 1, Punta del cautín calentando una lata .......................... 59
8.4.2.2 Prueba 2 Cautín solo .................................................................. 62
8.4.2.3 Prueba 3 Hielera ......................................................................... 64
8.4.2.4 Prueba 4 Jeringa ......................................................................... 65
8.4.2.5 Prueba 5 Temperatura Corporal tomada en la mano .................. 66
8.4.3 Tercera prueba .............................................................................. 68
8.4.3.1 Primera prueba, Medición de la jeringa respecto a terreno en
asfalto reciclado. ..................................................................................... 68
8.4.3.2 Segunda prueba, Medición de un metal respecto a terreno en
asfalto reciclado. ..................................................................................... 70
8.4.3.3 Tercera prueba, Medición de un metal frio respecto a terreno en
asfalto reciclado. ..................................................................................... 71
8.4.3.4 Cuarta prueba, Medición de una jeringa, metal al ambiente y
metal congelado respecto a terreno con pasto ....................................... 72
5
8.4.3.5 Quinta prueba, Medición de límites entre diferentes terrenos ... 73
9. CONCLUSIONES ....................................................................................... 78
10. REFERENCIAS BIBLIOGRAFICAS ........................................................ 80
LISTA DE TABLAS ........................................................................................... 82
LISTA DE FIGURAS ......................................................................................... 84
LISTA DE ANEXOS .......................................................................................... 86
Anexo A ......................................................................................................... 86
Anexo B ......................................................................................................... 89
GLOSARIO ....................................................................................................... 90
6
1. JUSTIFICACIÓN
Colombia es uno de los países que más sufre de la problemática de las minas
antipersona y a su vez el departamento de Antioquia, debido al conflicto
armado que se vive. Su fabricación barata, peligrosa, eficiente y difícil de
detectar, debido a los materiales utilizados en su construcción convirtiéndola en
el arma perfecta.
Sin embargo la topografía Colombiana especialmente la Antioqueña hace que
ningún prototipo haya podido ser utilizado debido a que no están
acondicionados para moverse por este territorio unos por su tamaña
relativamente grande y otros por ni siquiera poder desplazarse; por lo tanto
este proyecto utilizará la debida tecnología para esta detección de minas
desarrollada para el contexto especifico de Colombia y Antioquia.
Se propone la utilización de un robot hexápodo para la detección de minas
antipersona plásticas y de tipo jeringa en los ambientes montañosos de la
geografía Antioqueña, a partir del diferencial de temperatura producido por la
jeringa respecto a la vegetación alrededor de la misma.
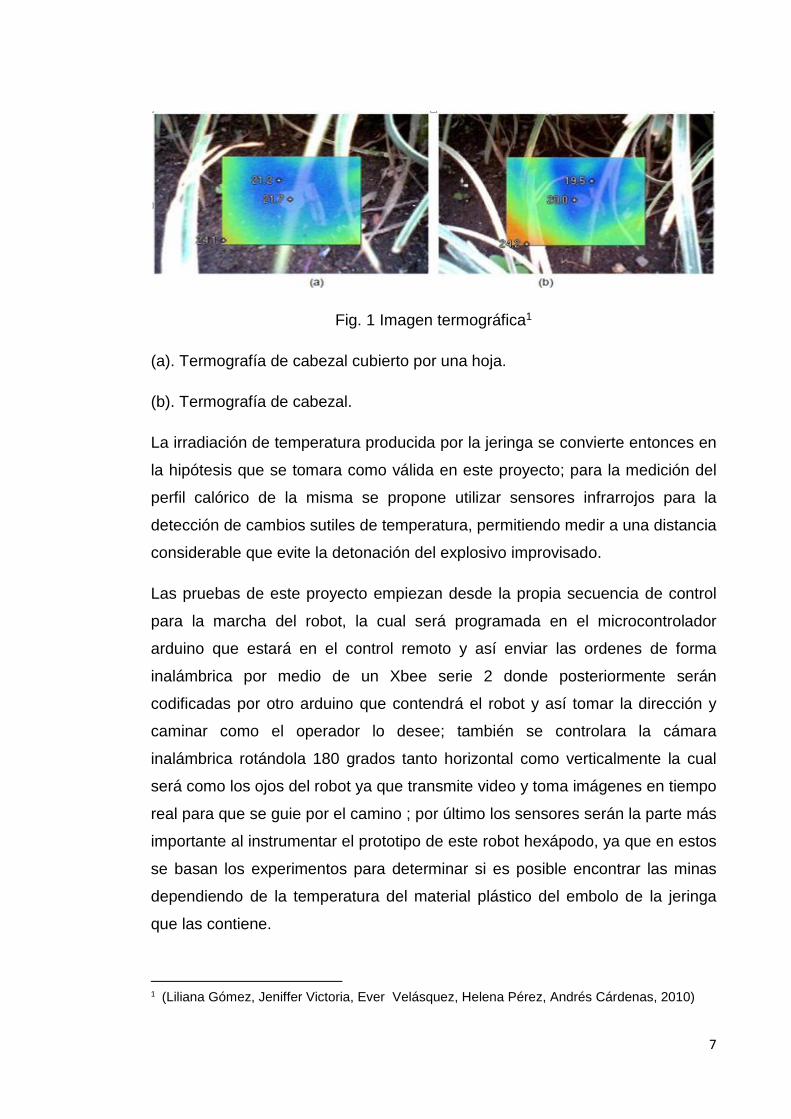
El principio de detección se basa en estudios realizados por el grupo de
investigación en modelamiento y simulación computacional, en el cual como se
observa en la Fig. 1 El cabezal de la jeringa utilizada como accionador de las
minas antipersona cambia su temperatura respecto al entorno a su alrededor,
llegando a cambios de 0.5oC, inclusive con la vegetación sobre la misma.
7
Fig. 1 Imagen termográfica1
(a). Termografía de cabezal cubierto por una hoja.
(b). Termografía de cabezal.
La irradiación de temperatura producida por la jeringa se convierte entonces en
la hipótesis que se tomara como válida en este proyecto; para la medición del
perfil calórico de la misma se propone utilizar sensores infrarrojos para la
detección de cambios sutiles de temperatura, permitiendo medir a una distancia
considerable que evite la detonación del explosivo improvisado.
Las pruebas de este proyecto empiezan desde la propia secuencia de control
para la marcha del robot, la cual será programada en el microcontrolador
arduino que estará en el control remoto y así enviar las ordenes de forma
inalámbrica por medio de un Xbee serie 2 donde posteriormente serán
codificadas por otro arduino que contendrá el robot y así tomar la dirección y
caminar como el operador lo desee; también se controlara la cámara
inalámbrica rotándola 180 grados tanto horizontal como verticalmente la cual
será como los ojos del robot ya que transmite video y toma imágenes en tiempo
real para que se guie por el camino ; por último los sensores serán la parte más
importante al instrumentar el prototipo de este robot hexápodo, ya que en estos
se basan los experimentos para determinar si es posible encontrar las minas
dependiendo de la temperatura del material plástico del embolo de la jeringa
que las contiene.
1 (Liliana Gómez, Jeniffer Victoria, Ever Velásquez, Helena Pérez, Andrés Cárdenas, 2010)
8
2. PLANTEAMIENTO DEL PROBLEMA
Casi a diario salen en los medios de comunicación noticias sobre incidentes
con las minas antipersona siendo unas de las armas más utilizadas las cuales
dejan un grandísimo costo humano causando alteraciones en el cuerpo de los
militares, civiles, hasta de los mismos integrantes de grupos subversivos o en
el peor de los casos la muerte. Debido a la gran problemática de las minas
antipersona en Colombia, se deben cubrir varios aspectos entre los cuales van
desde el social, el económico hasta el psicológico.
Colombia es el único país de América Latina donde aún se siembran minas
antipersona; los municipios afectados suman ya más de un centenar,
aproximadamente el 15% del territorio del país. En los últimos años Colombia
pasó de tener una problemática leve en esta materia a la categoría de grave,
según estándares internacionales.2
De acuerdo al reporte del centro de investigación y educación popular (CINEP),
se estima que existen más de 100.000 minas antipersonal sembradas en
Colombia, cubriendo 32 departamentos, siendo Santander, Córdoba y
Antioquía los más afectados.3
Según reportes del Programa Presidencial para la Acción Integral contra Minas
Antipersonal, desde 1990 hasta octubre del 2012, en Colombia se han
reportado 10.160 víctimas, donde los departamentos con mayor índice de
afectados se ven en la Tabla 1
2 Ministerio de Comunicaciones de Colombia, Embajada de Canadá y Fondo de Naciones Unidas (UNICEF).”Sembrando Minas…Cosechando Muerte” Bogotá, Colombia. Septiembre/2000. 3 Minas Antipersonas en Colombia Costo Físico y Emocional. Gloria Isabel Hernández Díaz.2003.

9
DEPARTAMENTO VICTIMAS
Antioquia 2263
Meta 998
Caquetá 780
Norte de Santander 708
Nariño 660
Bolívar 598
Arauca 546
Cauca 509
Tolima 505
Tabla 1. Número de afectados hasta el 2012
El Departamento de Antioquia es en la actualidad la región más afectadas por
la presencia de Minas antipersona, Del total de 125 municipios, en 93 se han
presentado accidentes y/o peligros (eventos).De las 10.160 personas que entre
1990 y 2012 han sido víctimas de minas antipersonal en Colombia, Antioquia
tiene el 22,2% de los casos con 2.263 afectados, según cifras del Sistema de
Gestión de Información sobre Actividades relativas a Minas Antipersonal
(IMSMA, por sus siglas en inglés) del Programa Presidencial para la Acción
Integral contra Minas Antipersonal (Paicma).[13]
Del total de víctimas reportadas (1990 – octubre 31 de 2012) , el 79% (7.982)
resultó herida y el 21% (2.112) murió, de los3.841 afectados civiles, 3.073
(80%) resultaron heridos y 768 (20%) murieron, de los 6.253 miembros de la
Fuerza Pública afectados, 4.909 (79%) quedaron heridos y 1.344 (21%)
fallecieron, entre enero y octubre 31 de 2012, 146 civiles y 200 miembros de la

10
Fuerza Pública quedaron heridos; 40 civiles y 28 miembros de la Fuerza
Pública murieron.4
El Gobierno Departamental de Antioquia, ha sido contundente en la Acción
Integral en Contra de las Minas Antipersonal, por tal razón se ejecuta, en
coordinación interinstitucional con la Secretaría de Educación para la Cultura,
la Dirección Seccional de Salud y la Secretaría de Gobierno Departamental, en
el marco del Convenio Unión Europea y la Gobernación de Antioquia, el
Proyecto de Institucionalización y sostenibilidad de la Educación en el Riesgo
de minas Antipersonal y la Atención Básica Biopsicosocial a las Víctimas de
Minas Antipersonal en 46 Municipios del Departamento.
El problema de las Minas Antipersonal, las Municiones sin Explotar y los
Artefactos Explosivos Improvisados, afecta a todos tanto de quienes habitan
zona urbana como rural, convirtiéndose en un problema de Salud Pública, por
lo que deben realizarse acciones en este aspecto, ya que este artefacto no
reconoce sexo ni raza ni religión mucho menos entre posible víctima o
victimario acabando así con sus sueños, con su futuro incluso causando
problemas físicos y psicológicos de por vida.
Aunque no existen cifras para la nación Colombiana, la organización
Physiciansfor Human Rights, PHR, estima que los costos de los tratamientos
médicos para garantizar una recuperación completa oscilan entre los US$3.000
y US$5.000, los costos de los aparatos para movilización que necesitarán un
niño o niña víctimas de mina se encuentran por encima de los US$3.000,
mientras que los costos para la fabricación de una mina antipersonal artesanal
se aproximan a los UDS$3, convirtiendo a este flagelo tan costoso socialmente
como económicamente.3
Hay diferentes tipos de minas Fabricadas por Grupos Armados al Margen de la
Ley; la dimensión y el tamaño de las minas artesanales dependen del objetivo
deseado por los grupos armados al margen de la ley. Anteriormente las minas
antipersona estaban compuestas por lámina galvanizada, Brea, metralla y
4 Programa Presidencial para la Acción Integral contra Minas Antipersonal (PAICMA). 2012.
11
explosivo, pero actualmente utilizan envases plásticos, jeringas, pintura lo cual
las hace casi indetectables con los dispositivos electrónicos que existen las
cuales son el objeto de estudio de este proyecto; debido a la variedad de
formas tienen diferentes sistemas de activación como lo son por presión, por
tensión, por movimiento, o la combinación de varios sistemas a la vez, hacen
de este tipo de armas casi imposibles de detectar y desactivar, convirtiéndolas
en un elemento bélico sencillo pero eficiente.
Por todo lo descrito anteriormente, se propone la implementación de un
sistema robótico liviano que permita la detección y visualización de minas
antipersonales ubicadas en la superficie terrestre. El prototipo consistirá de un
vehículo tele operado, instrumentado con una cámara que transmite y recibe
video en tiempo real, sensores infrarrojos de temperatura para la detección y
visualización de minas antipersona.
12
3. OBJETIVO GENERAL
Instrumentar un robot hexápodo controlado para el análisis y detección de
minas antipersona terrestres tipo jeringa mediante el perfil térmico generado,
en terrenos montañosos de la geografía Antioqueña.
4. OBJETIVOS ESPECIFICOS
Detectar artefactos explosivos improvisados plásticos con accionador de tipo
jeringa que son los utilizados actualmente por los grupos subversivos
Colombianos.
Optimizar la secuencia de control apropiada para emular el caminar de un
insecto en los terrenos montañosos de la geografía Antioqueña.
Desarrollar un algoritmo que permitan la medición de temperatura sin contacto
directo implementando sensores infrarrojos para determinar los cambios
térmicos generados por el cabezal y el embolo de la jeringa utilizado en las
minas antipersona artesanales.
13
5. MARCO REFERENCIAL
5.1 XBEE
Los módulos Xbee proporcionan una conectividad, transmisión y recepción de
datos inalámbricamente teniendo un rango de distancia relativamente grande
que va desde los 90 metros hasta 80 Kilómetros dependiendo de la referencia
del mismo, siendo ideal para este proyecto de detección de minas.
Los módulos Xbee tiene dos opciones de de comunicación como lo son la
transmisión serial transparente (AT), o el modo API en ingles (Application
Programming Interface), los cuales pueden ser configurados desde el
computador utilizando el programa X-CTU o desde cualquier microcontrolador
en este caso arduino; los Xbee pueden comunicarse en arquitecturas punto a
punto, punto a multipunto o en una red mesh.
Entre sus principales características están: Buen alcance siendo de 90 metros
en los modulo Xbee y 1.6 Kilómetros para los módulos Xbee Pro, tiene 9
entradas/salidas analógicas y digitales, tiene muy bajo consumo de energía,
menos de 50mA cuando está en funcionamiento y menos de 10uA cuando está
en modo sleep o reposo, tiene 65000 direcciones para cada uno de los 16
canales disponibles, por lo que se puede tener varios Xbee conectados en una
misma red, y son muy fáciles de integrar.
Existen dos series de los módulos Xbee los cuales son la serie 1 y la serie 2,
aunque la configuración de sus pines es la misma no son compatibles entre sí
ya que utilizan diferentes chipset y trabajan con protocolos diferentes.
Algunas de sus aplicaciones son: Sistemas de seguridad y controles de
iluminación, Automatización de casa o domótica, Monitoreo de sistemas
remotos, colección de datos de un sensor en sistemas embebidos. [15]
5.2 MEDICIÓN DE TEMPERATURA DEL SUELO
La temperatura de suelo se constituye en uno de los parámetros más
relevantes en la estimación de diversas variables de interés ambiental, tales
como la evapotranspiración, inercia térmica, entre otras. En la práctica, la
14
estimación de la temperatura de suelo es llevada a cabo mediante termómetros
o termistores con la problemática asociada de un alto costo económico si se
quieren cubrir extensas áreas geográficas. La solución a estos inconvenientes
surge en la década de los años cincuenta con el desarrollo de la tecnología
infrarroja y con su posterior utilización a bordo de satélites artificiales; desde el
primero de ellos, el Televisión Infrared Operation Satellite (TIROS), hasta los
actuales satélites de la Nacional Oceánica and Atmospheric Administration
(NOAA) y LandSatellite (LANDSAT), que permiten el acceso de información de
la superficie de la tierra a escala sin óptica. [10]
La capa más superficial del suelo experimenta las mayores oscilaciones de
temperatura, las cuales se propagan desde ella hacia arriba al aire, y hacia
abajo, al subsuelo, amortiguándose rápidamente sobre todo cuando es en
sentido descendente. Para medir la perdida de calor que experimenta el suelo,
que en su mayor parte pasa al aire, se utiliza su temperatura mínima durante la
madrugada, cuando no queda contrarrestada por la absorción de la radiación
solar directa y difusa. Dicha temperatura mínima se mide instalando un
termómetro ordinario de mínima en proporción horizontal, suspendido por un
ligero soporte y casi rozando el suelo, pero sin tocarlo. Normalmente se retira
durante el día. El dato de este termómetro suele denominarse termómetro de
radiación nocturna. La temperatura del subsuelo se mide a las profundidades
de 50 y 100cms con un termómetro especial acodado, de modo que su
depósito de mercurio se encuentre dentro de la tierra y la escala de medición a
la vista del observador. Debe protegerse de los rayos del sol y su lectura ha de
hacerse sin mover el termómetro de su emplazamiento.
Para profundidades mayores, se excava un estrecho pozo en el que se
introduce un tubo de madera o hierro cerrado por su parte inferior. Dentro de
este tubo va colgado un termómetro ordinario, encerrado en una vaina de vidrio
rellena de parafina. El pozo se cierra mediante una especie de tapón y se saca
con él el termómetro. La parafina, muy mala conductora del calor, evita que la
temperatura del termómetro varíe durante el tiempo necesario para su lectura.
Una vez realizada ésta se vuelve a colocar en su posición. Como las

15
oscilaciones de temperatura en el subsuelo son siempre muy lentas, la parafina
no impide que el termómetro se encuentre siempre prácticamente en equilibrio
de temperatura con la capa del terreno a cuya profundidad de encuentra. [14]
5.3 SISTEMA TELEOPERADO
Un sistema tele operado se compone principalmente de una estación de
teleoperación, un sistema de comunicación y esclavo, el esclavo puede ser un
manipulador o un robot móvil equipado con un manipulador equipado en un
entorno remoto. La estación de teleoperación permite controlar el esclavo a
distancia por medio de un sistema de comunicación el cual permite transmitir
las señales de control hacia el esclavo, y a su vez, recibir las señales de
información sobre el estado de este en la estación de teleoperación a través de
un canal de comunicación que puede ser una red de computadores, un enlace
de radiofrecuencia o microondas. [7]
5.4 MECANISMOS CUADRÚPEDOS Y HEXÁPODOS
La iniciativa de aplicar mecanismos de patas para el desminado humanitario ha
estado en desarrollo durante la última década. Al principio algunos robots de
propósito general fueron probados para esta aplicación, pero hoy en día
prototipos específicos de desarrollo características especiales están siendo
construidos y probados. El TITAN VIII caminar robot, un robot de cuatro patas
desarrollado como un robot de propósito general para caminar en el Instituto de
Tecnología de Tokio, Japón, fue uno de los primeros robots adaptados para el
desminado tareas. AMRU-2, un electro-neumático hexápodo desarrollado por
la Real Academia Militar y la Universidad Libre de Bruselas, Bélgica, y RIMHO-
2, un robot de cuatro patas desarrollado en el Instituto de Automática Industrial
- CSIC, España, son dos ejemplos más de caminando robots utilizados como
bancos de pruebas experimentales para las tareas de desminado
humanitario.[5]
16
6. DISENO METODOLOGICO PRELIMINAR
6.1 METODOLOGIA
Tipo: Exploratoria
Evaluar el diferencial de temperatura de los émbolos de las jeringas respecto a
la capa vegetal, como método para la detección de minas antipersona.
Fuente de los datos:
6.1.1 Pruebas experimentales
Captura de señales de temperatura.
Segmentación y reconocimiento de contornos.
6.1.2 Técnicas y Herramientas
Observación, Entrevistas, Clasificación de las señales con métodos
estadísticos.
Guías de entrevista y observación e instrumentos de medición y captura de
señal.
6.2 DESCRIPCION DE LA PROPUESTA
Mediante cámara se transmitirá video en tiempo real para visualizar todo lo que
hay alrededor del robot hexápodo como el terreno la vegetación, los obstáculos
que se presenten en el camino y la detección de la mina antipersona.
A partir de esto se instrumentara el robot hexápodo ch3-r de lynxmotion,
primero realizando un algoritmo que permita emular el caminar de un insecto
de 6 patas para que se pueda desplazar sobre terrenos Antioqueños que son
irregulares debido a su geografía; después se utilizarán sensores infrarrojos de
temperatura de referencia MLX90614 con su respectivo algoritmo programado
en la plataforma arduino se propone la tarea de detectar minas antipersona tipo
jeringa , encontrando pequeños cambios de temperatura en el material plástico
del cabezal de la jeringa con la ventaja que no necesitan tener contacto directo
con el objeto a medir.
17
Para evaluar los métodos de medición se utilizara la exploración y la
experimentación ya que es un tema poco tratado, se compararan diferentes
mediciones de temperatura del embolo de la jeringa que es de material plástico
con elementos de otros materiales, inclusive con elementos que están en su
alrededor como piedras, madera o la misma vegetación.
Los datos serán transmitidos y recibidos inalámbricamente mediante dos
módulos Xbee serie 2, los cuales un módulo se instalará en el control remoto
que contará con dos joystick análogos además de 5 botones digitales para
funciones adicionales que se programaran ya sea en este proyecto en la
continuación ya que es un trabajo de semillero una de las funciones puede ser
una manera diferente de medir la temperatura o de caminar, y el otro modulo
se instalará en el robot hexápodo.
6.3 PROPOSITO DEL PROYECTO DE GRADO
Ya que este es un proyecto de semillero, se ha venido desarrollando con
anterioridad, el cual ya posee una estructura con procedimientos y
experimentos ya realizados de los cuales algunos se tomaran en cuenta para
su optimización y adecuación a esta nueva propuesta la cual consta de 4
etapas fundamentales las cuales se explicaran paso a paso las cuales son : El
análisis de la estructura del robot hexápodo CH3-R, la adquisición de datos, La
transmisión inalámbrica y por último, el reconocimiento y procesamiento se las
señales.
A continuación en la Fig. 2 se muestra la propuesta a seguir para realizar este
proyecto

18
Fig. 2 Descripción de la propuesta5
6.3.1Robot Hexápodo
Se parte del prototipo CH3-R debido a sus características, como el peso, el
material y su fácil ensamblaje ahorrando así tiempo; primero que todo se
realizara una investigación previa para el debido caminar del robot hexápodo
CH3-R de Lynxmotion que cuenta con 6 extremidades, cada una cuenta con 3
servomotores lo cual serian en total18 servomotores, con 3 grados de libertad
para el movimiento, los cuales están enlazados en un chasis redondo
simétrico para mayor flexibilidad y así emular los movimientos de un insecto,
entre los más opcionados están un cucarrón y una hormiga debido a su
anatomía y a la cantidad de patas.
Después de escoger el caminar del insecto más adecuado se parte de una
secuencia de unas pruebas ya realizadas con anterioridad sobre terreno plano
específicamente sobre baldosa el cual se va a optimizar a partir de la
construcción de un control remoto, después se analizaran los resultados de la
5 Autoría propia
19
motricidad sobre este terreno como el piso de cualquier edificación ,
dependiendo de los resultados obtenidos se pasara analizar terrenos más
irregulares, como caminos destapados, arenosos, o con obstáculos como
piedras siendo lo más parecido a una montaña o un bosque, estas pruebas se
van a realizar en una finca que cuenta con terrenos muy parecidos a estos.
6.3.2 Adquisición De Datos
Se programara un control secuencial o algoritmo en la tarjeta de desarrollo
arduino Mega, debido a su memoria y a su cantidad de entradas análogas y
digitales apropiadas, este trabajara como receptor ya que es el que recibe las
ordenes y las procesa, y como transmisor se utilizara un arduino uno ya que
necesita menos procesamiento de la señal e ira instalado en el control remoto.
Se recibirán y se enviaran diferentes señales entre las cuales están las de los
joystick análogos los cuales forman parte del control remoto inalámbrico
cumpliendo la función de movilizar el robot hexápodo, otra señal es la que
ofrecen los sensores infrarrojos de temperatura MLX90614 los cuales se
configuran para que trabajen con el protocolo I2C el cual realiza una
transmisión serial, estos cumplirán la función de medir diferentes temperaturas
a objetos sin contacto directo.
6.3.3 Comunicación inalámbrica
Las primeras pruebas se realizaron con un modulo Bluetooth RN-42, los cuales
generaron respuestas satisfactorias pero tiene una limitante y es el rango de la
distancia, pues solo alcanza de 4 a 5 metros para obtener una transmisión y
recepción de datos aceptable por lo cual se tendrá que optimizar la forma de
comunicar cambiando esta tecnología.
Por esto se opto por cambiar la forma de transmitir inalámbricamente por el
módulo Xbee serie 2 que proporciona rangos de distancia superiores en
comparación con el Bluetooth RN-42, debido que en la vida real una mina
antipersona es una de las armas más peligrosas que existen y para no afectar
la integridad de la persona que está manejando el robot hexápodo tiene que
estar a una distancia considerablemente lejos ni sufrir la pérdida del mismo
robot.
20
Para esto se necesitan dos módulos Xbee serie 2 uno que se pone en el
control remoto que se diseñe y otro en el robot hexápodo para que estén
sincronizados todo el tiempo de la operación configurándolos de tal modo que
uno sea el maestro o coordinador y el otro como esclavo o router y así sean
tanto transmisor y receptor.
6.3.4 Reconocimiento
El robot hexápodo lleva una cámara la cual muestra en una pantalla sea de un
computador, televisor u otro dispositivo el terreno que va siendo recorrido por el
robot y de esta forma observar cómo responde al momento de desplazarse por
terrenos irregulares ya sea boscoso o entre piedras de la región Antioqueña,
tomando la decisión de cuál es el camino más adecuado para avanzar o
retroceder según sea la necesidad de la búsqueda.
La principal etapa de reconocimiento será analizada por los datos que
entreguen los sensores infrarrojos de temperatura mediante un apropiado
algoritmo y así comprobar si son los sensores adecuados para detectar una
mina tipo jeringa encontrando una diferencia de 0.5oC entre el cabezal de la
jeringa y su entorno.
Para realizar esto se procede a sembrar tres jeringas para simular una mina
antipersona; la primera se sembrara en un terreno plano boscoso pero
despejado de hierba, la segunda en un terreno plano boscoso con mucha
hierba y la tercera en un terreno irregular con mucha hierba y así hacer una
comparación entre los datos entregados por los sensores al momento de medir
la temperatura.
21
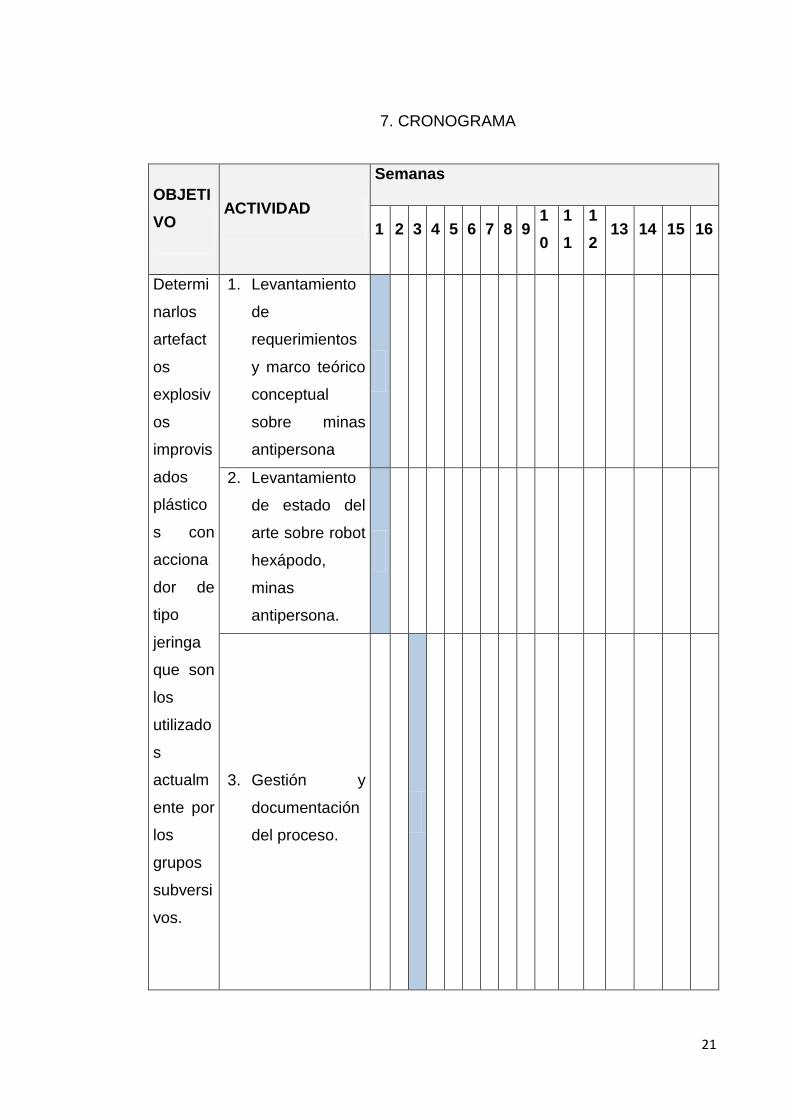
7. CRONOGRAMA
OBJETI
VO ACTIVIDAD
Semanas
1 2 3 4 5 6 7 8 9 1
0
1
1
1
2 13 14 15 16
Determi
narlos
artefact
os
explosiv
os
improvis
ados
plástico
s con
acciona
dor de
tipo
jeringa
que son
los
utilizado
s
actualm
ente por
los
grupos
subversi
vos.
1. Levantamiento
de
requerimientos
y marco teórico
conceptual
sobre minas
antipersona
2. Levantamiento
de estado del
arte sobre robot
hexápodo,
minas
antipersona.
3. Gestión y
documentación
del proceso.
22
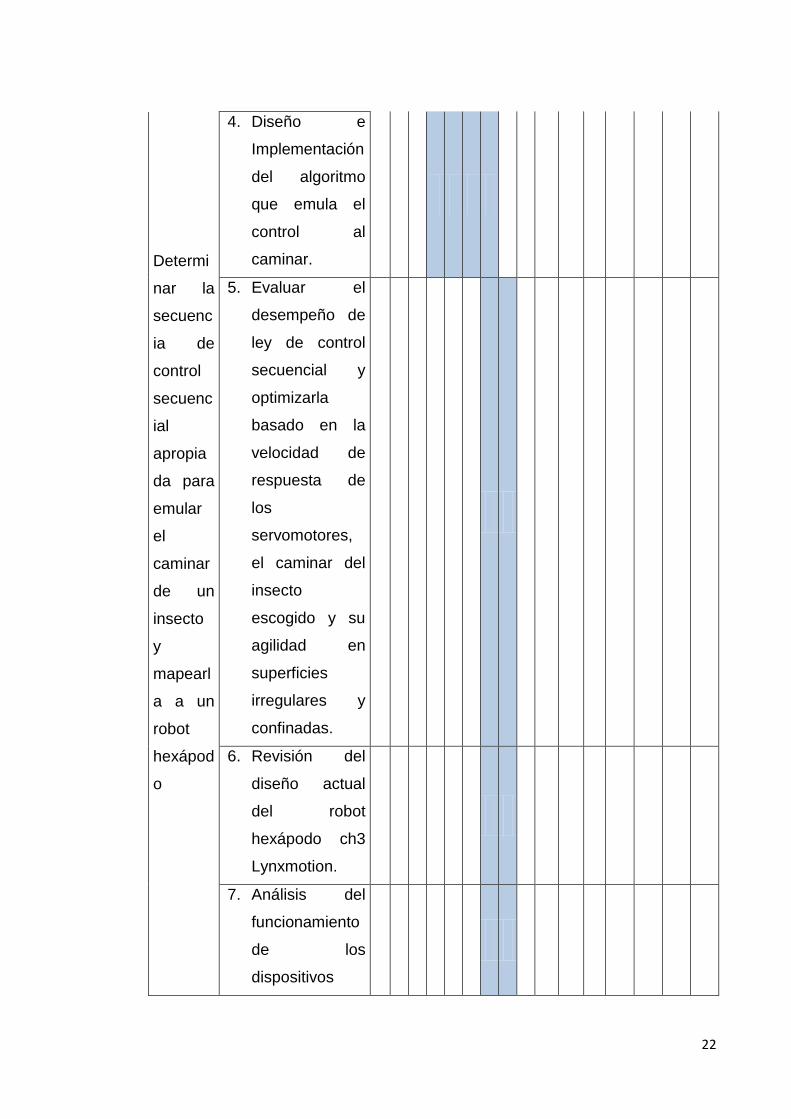
Determi
nar la
secuenc
ia de
control
secuenc
ial
apropia
da para
emular
el
caminar
de un
insecto
y
mapearl
a a un
robot
hexápod
o
4. Diseño e
Implementación
del algoritmo
que emula el
control al
caminar.
5. Evaluar el
desempeño de
ley de control
secuencial y
optimizarla
basado en la
velocidad de
respuesta de
los
servomotores,
el caminar del
insecto
escogido y su
agilidad en
superficies
irregulares y
confinadas.
6. Revisión del
diseño actual
del robot
hexápodo ch3
Lynxmotion.
7. Análisis del
funcionamiento
de los
dispositivos
23
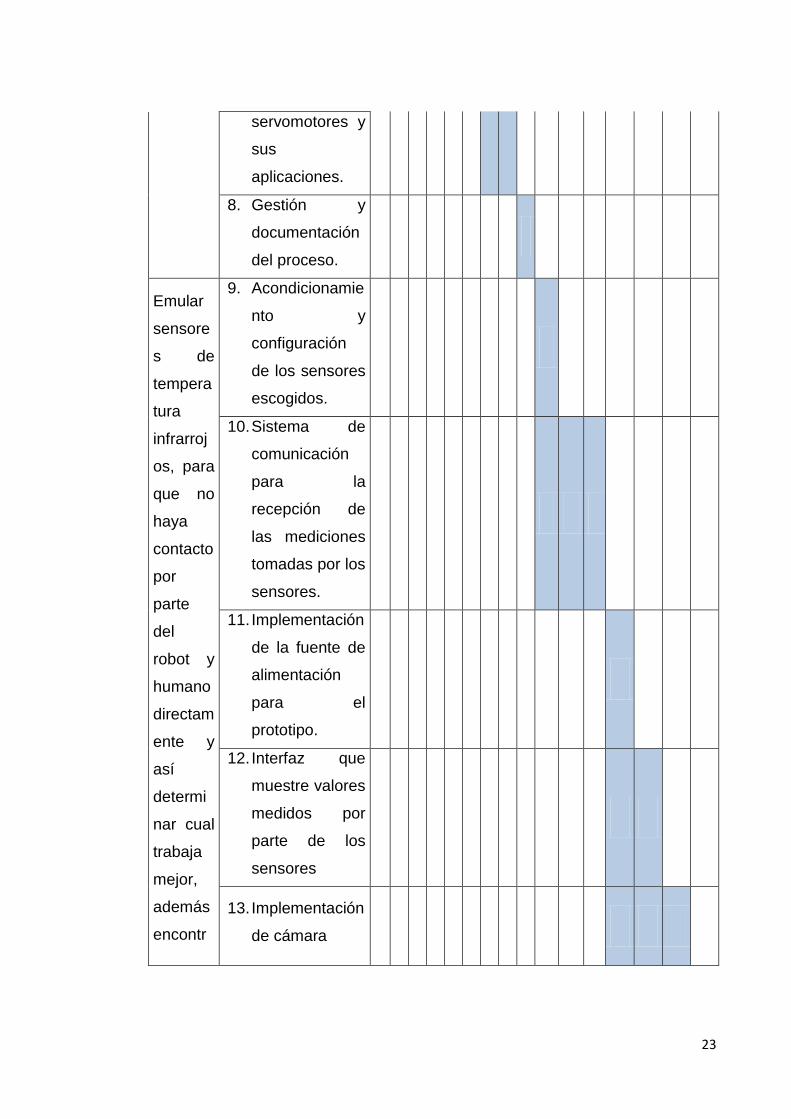
servomotores y
sus
aplicaciones.
8. Gestión y
documentación
del proceso.
Emular
sensore
s de
tempera
tura
infrarroj
os, para
que no
haya
contacto
por
parte
del
robot y
humano
directam
ente y
así
determi
nar cual
trabaja
mejor,
además
encontr
9. Acondicionamie
nto y
configuración
de los sensores
escogidos.
10. Sistema de
comunicación
para la
recepción de
las mediciones
tomadas por los
sensores.
11. Implementación
de la fuente de
alimentación
para el
prototipo.
12. Interfaz que
muestre valores
medidos por
parte de los
sensores
13. Implementación
de cámara
24
ar un
algoritm
o que
permita
la
detecció
n de los
cambios
de
tempera
tura del
émbolo
y la
cabeza
de una
mina
antipers
ona tipo
jeringa.
14. Gestión y
documentación
del
proceso.(esto
en cada uno)
Docume
ntación
total de
proceso.
15. Gestión y
documentación
final del
proceso.
25
8. ROBOT HEXÁPODO PARA LA DETECCIÓN DE MINAS ANTIPERSONA
ARTESANALES TIPO JERINGA
8.1 COMPONENTES ELÉCTRICOS Y ELECTRONICOS
Para lograr el funcionamiento de la secuencia de control se utilizaron diferentes
componentes eléctricos y electrónicos con los cuales se realizaron varias
pruebas con cada dispositivo por aparte para después unirlos y lograr el
objetivo del movimiento o de la emulación del caminar de un insecto en el robot
hexápodo.
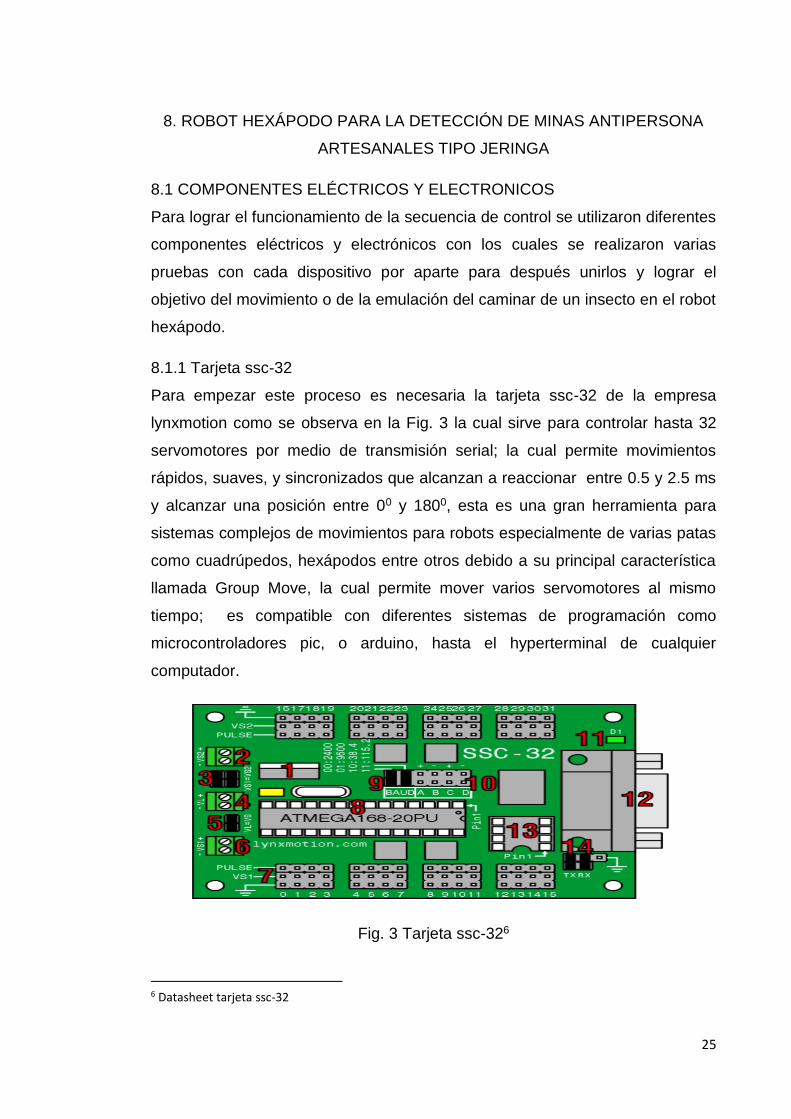
8.1.1 Tarjeta ssc-32
Para empezar este proceso es necesaria la tarjeta ssc-32 de la empresa
lynxmotion como se observa en la Fig. 3 la cual sirve para controlar hasta 32
servomotores por medio de transmisión serial; la cual permite movimientos
rápidos, suaves, y sincronizados que alcanzan a reaccionar entre 0.5 y 2.5 ms
y alcanzar una posición entre 00 y 1800, esta es una gran herramienta para
sistemas complejos de movimientos para robots especialmente de varias patas
como cuadrúpedos, hexápodos entre otros debido a su principal característica
llamada Group Move, la cual permite mover varios servomotores al mismo
tiempo; es compatible con diferentes sistemas de programación como
microcontroladores pic, o arduino, hasta el hyperterminal de cualquier
computador.
Fig. 3 Tarjeta ssc-326
6 Datasheet tarjeta ssc-32
26
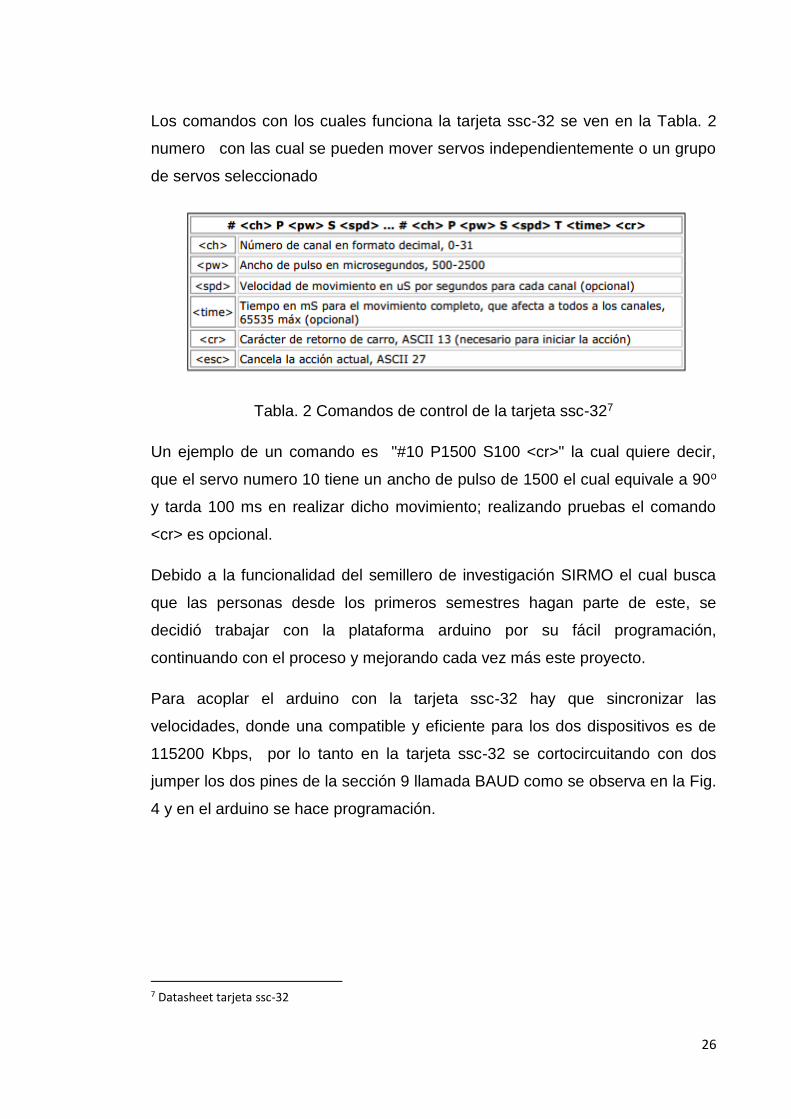
Los comandos con los cuales funciona la tarjeta ssc-32 se ven en la Tabla. 2
numero con las cual se pueden mover servos independientemente o un grupo
de servos seleccionado
Tabla. 2 Comandos de control de la tarjeta ssc-327
Un ejemplo de un comando es "#10 P1500 S100 <cr>" la cual quiere decir,
que el servo numero 10 tiene un ancho de pulso de 1500 el cual equivale a 90o
y tarda 100 ms en realizar dicho movimiento; realizando pruebas el comando
<cr> es opcional.
Debido a la funcionalidad del semillero de investigación SIRMO el cual busca
que las personas desde los primeros semestres hagan parte de este, se
decidió trabajar con la plataforma arduino por su fácil programación,
continuando con el proceso y mejorando cada vez más este proyecto.
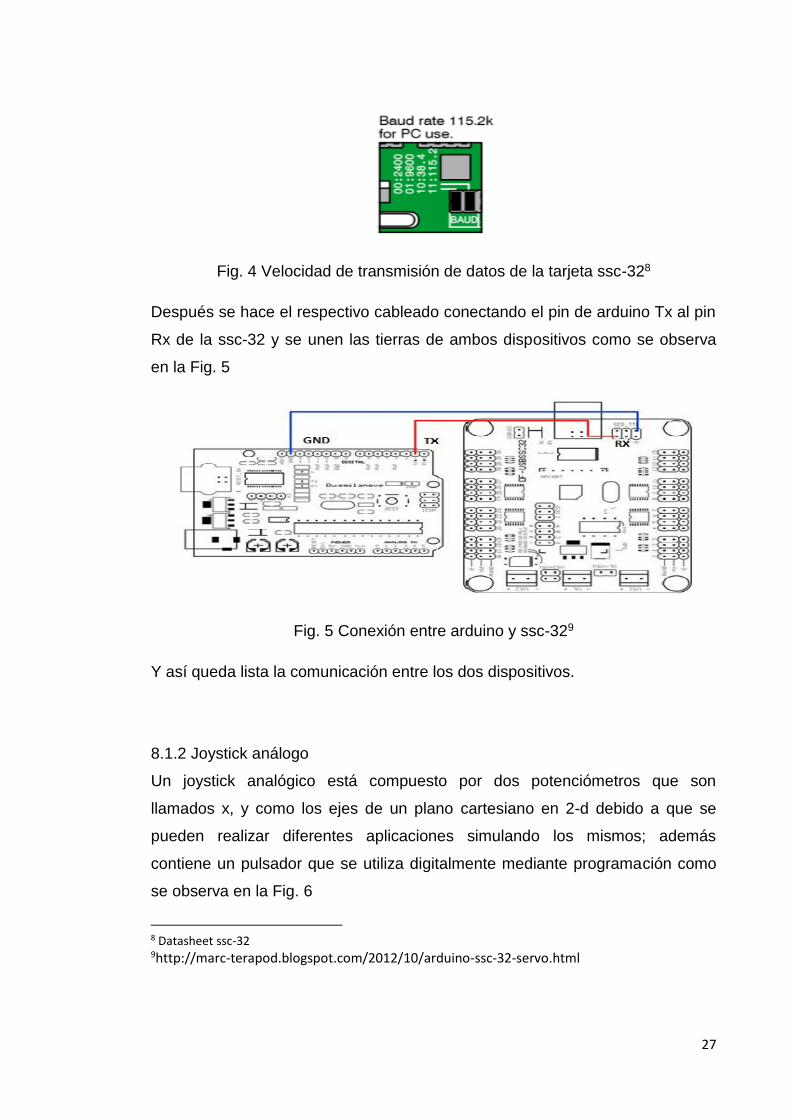
Para acoplar el arduino con la tarjeta ssc-32 hay que sincronizar las
velocidades, donde una compatible y eficiente para los dos dispositivos es de
115200 Kbps, por lo tanto en la tarjeta ssc-32 se cortocircuitando con dos
jumper los dos pines de la sección 9 llamada BAUD como se observa en la Fig.
4 y en el arduino se hace programación.
7 Datasheet tarjeta ssc-32
27
Fig. 4 Velocidad de transmisión de datos de la tarjeta ssc-328
Después se hace el respectivo cableado conectando el pin de arduino Tx al pin
Rx de la ssc-32 y se unen las tierras de ambos dispositivos como se observa
en la Fig. 5
Fig. 5 Conexión entre arduino y ssc-329
Y así queda lista la comunicación entre los dos dispositivos.
8.1.2 Joystick análogo
Un joystick analógico está compuesto por dos potenciómetros que son
llamados x, y como los ejes de un plano cartesiano en 2-d debido a que se
pueden realizar diferentes aplicaciones simulando los mismos; además
contiene un pulsador que se utiliza digitalmente mediante programación como
se observa en la Fig. 6
8 Datasheet ssc-32 9http://marc-terapod.blogspot.com/2012/10/arduino-ssc-32-servo.html
28
Fig. 6 Joystick análogo10
Dependiendo de la posición del joystick cada eje toma un valor propio, y
realizando una combinación de los dos se pueden controlar diferentes
dispositivos en este caso los servomotores del robot hexápodo
Los valores se ajustan para que la tarjeta ssc-32 reconozca los valores de los
ejes, ya que al conectarlos a 5V DC del arduino uno que tiene una resolución
de 10 bits su conversor ADC muestra valores de 0 a 1024, por lo tanto se
realiza una escalización para que el ancho del pulso quede entre 500 y 2500
que son los valores que recibe la tarjeta.
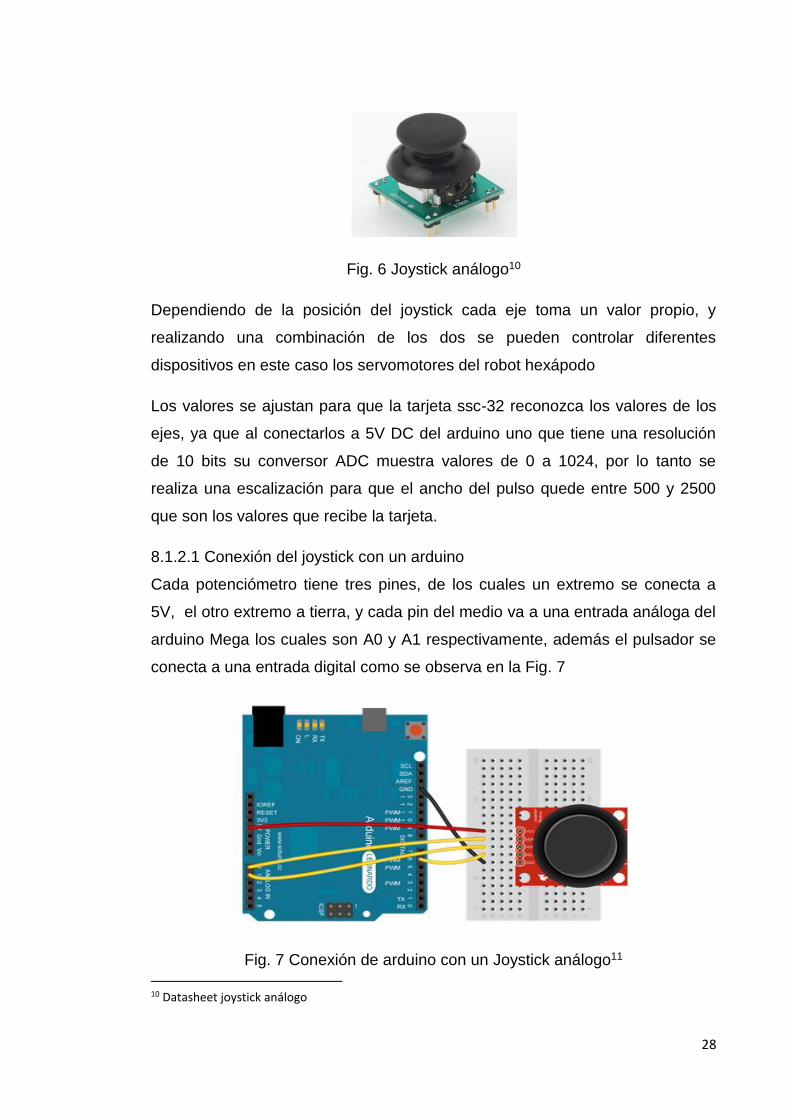
8.1.2.1 Conexión del joystick con un arduino
Cada potenciómetro tiene tres pines, de los cuales un extremo se conecta a
5V, el otro extremo a tierra, y cada pin del medio va a una entrada análoga del
arduino Mega los cuales son A0 y A1 respectivamente, además el pulsador se
conecta a una entrada digital como se observa en la Fig. 7
Fig. 7 Conexión de arduino con un Joystick análogo11
10 Datasheet joystick análogo
29
Es necesario dos joysticks análogos, para tener más funciones, algunas
realizadas en este proyecto por ejemplo para controlar el caminar del robot
hexápodo y la rotación de la cámara, y otras que se realizaran a futuro dentro
del semillero.
8.1.3 Transmisión Inalámbrica con Xbee Serie 2
Continuando con el proceso del semillero se llego a la conclusión de que la
forma de transmitir debería de cambiar, de pasar a trabajar con el modulo
bluetooth RN-42 al modulo Xbee serie 2 debido a que una de las principales
variables para que este proyecto tenga éxito es el rango de distancia entre el
operador del control remoto y el robot hexápodo que estará explorando en
campo abierto.
El bluetooth es un dispositivo muy común y se encuentra integrado en otros
sistemas como computadores y teléfonos celulares pero su limitante es que
solo tiene un rango de transmisión de 5 metros, mientras que el Xbee serie 2
alcanza un rango entre los 40 mts y 120 mts aproximadamente.
Para lograr la transmisión se necesita configurar dos Xbee serie 2, uno que va
en el control remoto diseñado donde toma el rol de maestro o coordinador; el
otro se coloca en el cuerpo del robot hexápodo y toma el papel de esclavo o
router; ambos funcionan como transmisor (Tx) y receptor (Rx) como se observa
en la Fig. 8
Fig. 8 Transmisión de datos entre dos Xbee serie 212
11 http://arduino.cc/en/Tutorial/JoystickMouseControl 12 Autoría propia
30
Para configurar los Xbee serie 2 se necesita de un software llamado X-CTU, en
el cual se pueden observar los seriales de cada modulo que son necesarios
para la comunicación.
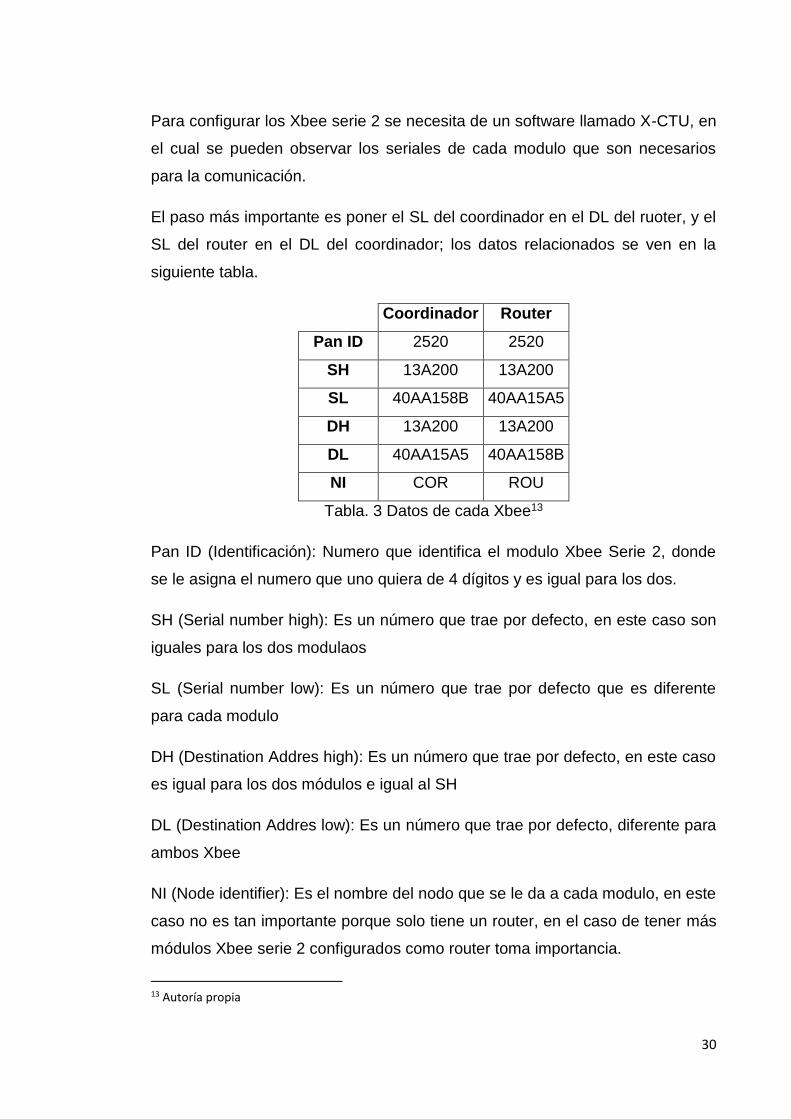
El paso más importante es poner el SL del coordinador en el DL del ruoter, y el
SL del router en el DL del coordinador; los datos relacionados se ven en la
siguiente tabla.
Coordinador Router
Pan ID 2520 2520
SH 13A200 13A200
SL 40AA158B 40AA15A5
DH 13A200 13A200
DL 40AA15A5 40AA158B
NI COR ROU
Tabla. 3 Datos de cada Xbee13
Pan ID (Identificación): Numero que identifica el modulo Xbee Serie 2, donde
se le asigna el numero que uno quiera de 4 dígitos y es igual para los dos.
SH (Serial number high): Es un número que trae por defecto, en este caso son
iguales para los dos modulaos
SL (Serial number low): Es un número que trae por defecto que es diferente
para cada modulo
DH (Destination Addres high): Es un número que trae por defecto, en este caso
es igual para los dos módulos e igual al SH
DL (Destination Addres low): Es un número que trae por defecto, diferente para
ambos Xbee
NI (Node identifier): Es el nombre del nodo que se le da a cada modulo, en este
caso no es tan importante porque solo tiene un router, en el caso de tener más
módulos Xbee serie 2 configurados como router toma importancia.
13 Autoría propia
31
Después de obtener los datos de cada Xbee serie 2 se procede a configurar
cada uno igual para los dos.
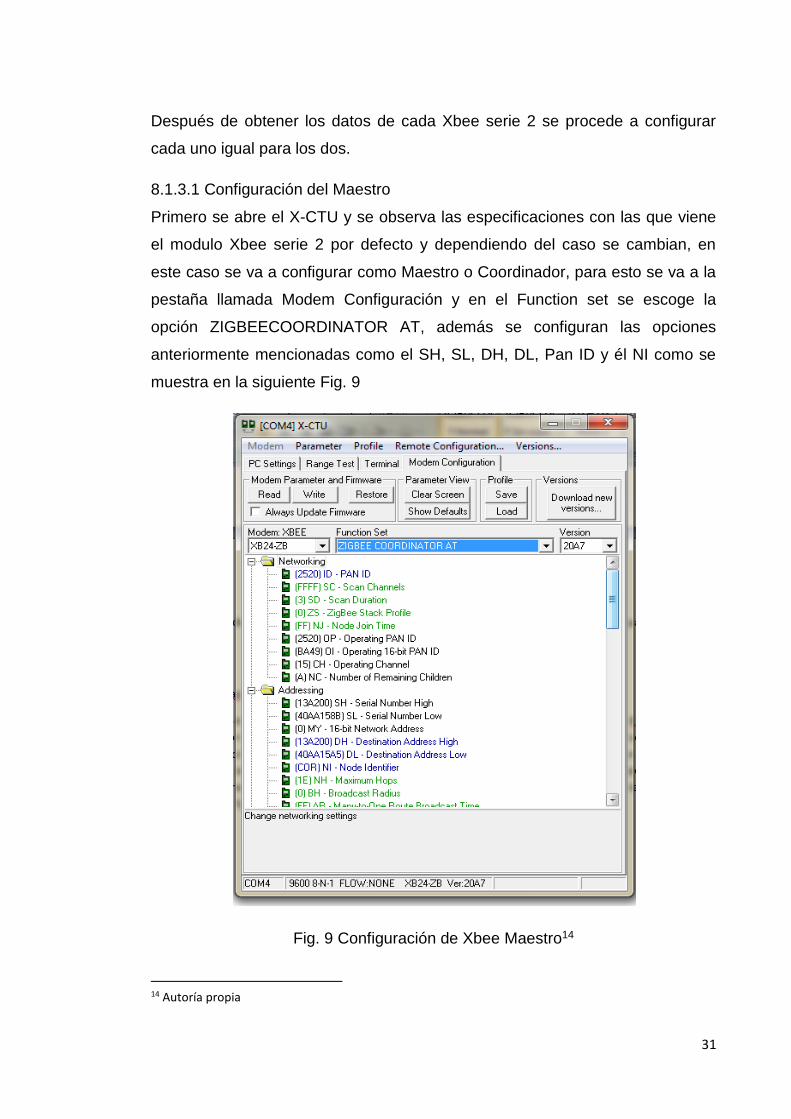
8.1.3.1 Configuración del Maestro
Primero se abre el X-CTU y se observa las especificaciones con las que viene
el modulo Xbee serie 2 por defecto y dependiendo del caso se cambian, en
este caso se va a configurar como Maestro o Coordinador, para esto se va a la
pestaña llamada Modem Configuración y en el Function set se escoge la
opción ZIGBEECOORDINATOR AT, además se configuran las opciones
anteriormente mencionadas como el SH, SL, DH, DL, Pan ID y él NI como se
muestra en la siguiente Fig. 9
Fig. 9 Configuración de Xbee Maestro14
14 Autoría propia

32
8.1.3.2 Configuración del esclavo
La configuración exactamente igual al maestro, pero en el function set se
escoge la opción ZIGBEE ROUTER AT, y el SH, SL, DH, DL, Pan ID y NI como
se especifico anteriormente, y se observa en la siguiente Fig. 10
Fig. 10 Configuración Xbee Esclavo15
La primera prueba es transmitir la palabra “Hola mundo”, comprobando que la
configuración está funcionando con éxito.
De esta forma quedan configurados Los Xbee serie 2 listos para terminar de
acoplar el circuito, el Maestro en el control remoto junto con el arduino uno, y el
Esclavo en el robot hexápodo junto con el arduino Mega y la tarjeta ssc-32.
15 Autoría propia
33
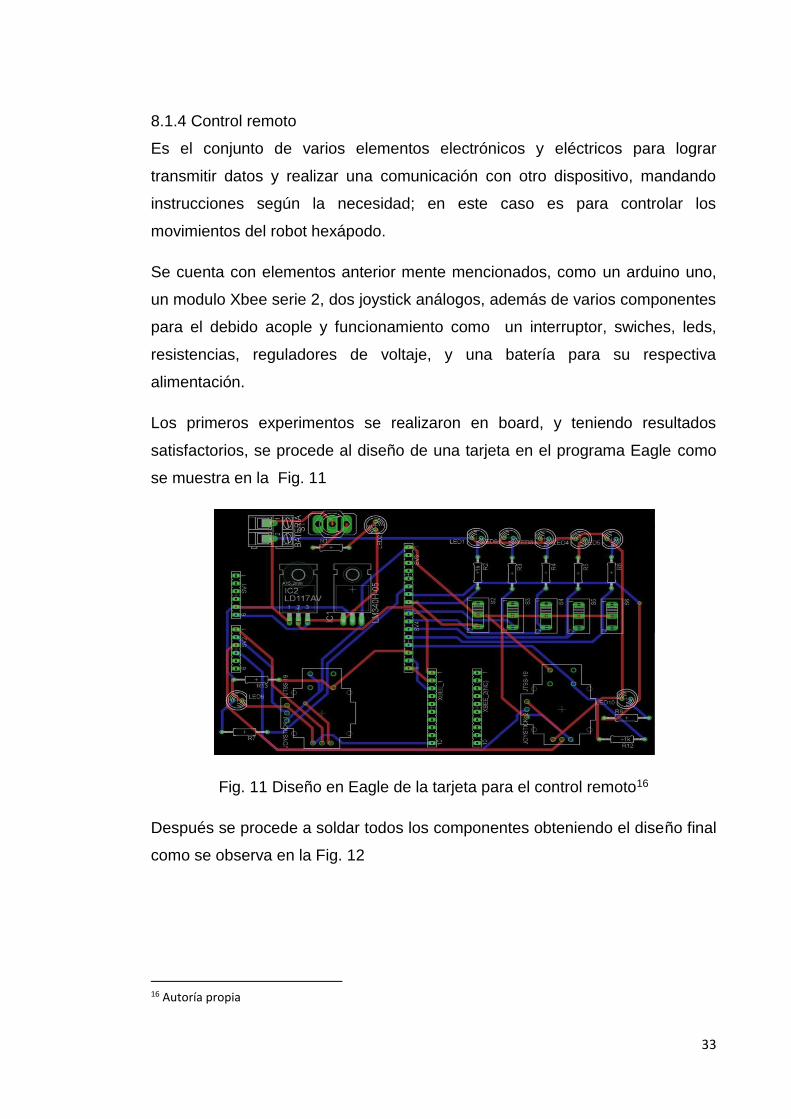
8.1.4 Control remoto
Es el conjunto de varios elementos electrónicos y eléctricos para lograr
transmitir datos y realizar una comunicación con otro dispositivo, mandando
instrucciones según la necesidad; en este caso es para controlar los
movimientos del robot hexápodo.
Se cuenta con elementos anterior mente mencionados, como un arduino uno,
un modulo Xbee serie 2, dos joystick análogos, además de varios componentes
para el debido acople y funcionamiento como un interruptor, swiches, leds,
resistencias, reguladores de voltaje, y una batería para su respectiva
alimentación.
Los primeros experimentos se realizaron en board, y teniendo resultados
satisfactorios, se procede al diseño de una tarjeta en el programa Eagle como
se muestra en la Fig. 11
Fig. 11 Diseño en Eagle de la tarjeta para el control remoto16
Después se procede a soldar todos los componentes obteniendo el diseño final
como se observa en la Fig. 12
16 Autoría propia
34
Fig. 12 Control Remoto en la caja portatil17
8.2 CAMINAR DEL ROBOT HEXAPODO
Con todos los pasos anteriores realizados con éxito se procede a la evaluación
de uno de los principales objetivos que se plantearon el cual es la optimización
del caminar del un robot hexápodo emulando un insecto.
Como se mencionó anteriormente este es un proyecto de semillero que viene
siendo desarrollado con anterioridad, del cual se han obtenido resultados y se
pretenden mejorar.
Entre sus principales resultados esta la primera secuencia de control la cual
emula a un insecto, según observaciones y estudios se relaciona y se acerca
más a la forma de una hormiga, siendo el principal argumento que tanto el
robot hexápodo como la hormiga tienen 6 extremidades perteneciendo al grupo
de los hexápodos.
17 Autoría propia
35
En la secuencia de control se logro que el hexápodo caminara en dirección
norte, sur, oriente occidente, las cuales equivalen a arriba, abajo, derecha, e
izquierda, además que diera un giro sobre sí misma.
Como parte de la mejora en este proyecto se mejoró la secuencia de control
añadiéndole las direcciones diagonales las cuales son diagonal superior
izquierda, diagonal superior derecha, diagonal inferior izquierda, diagonal
inferior derecha, la cuales se explican a continuación.
Optimizando así el proceso para que el hexápodo desarrolle su caminar en
terrenos que no son planos, mejor llamados terrenos irregulares.
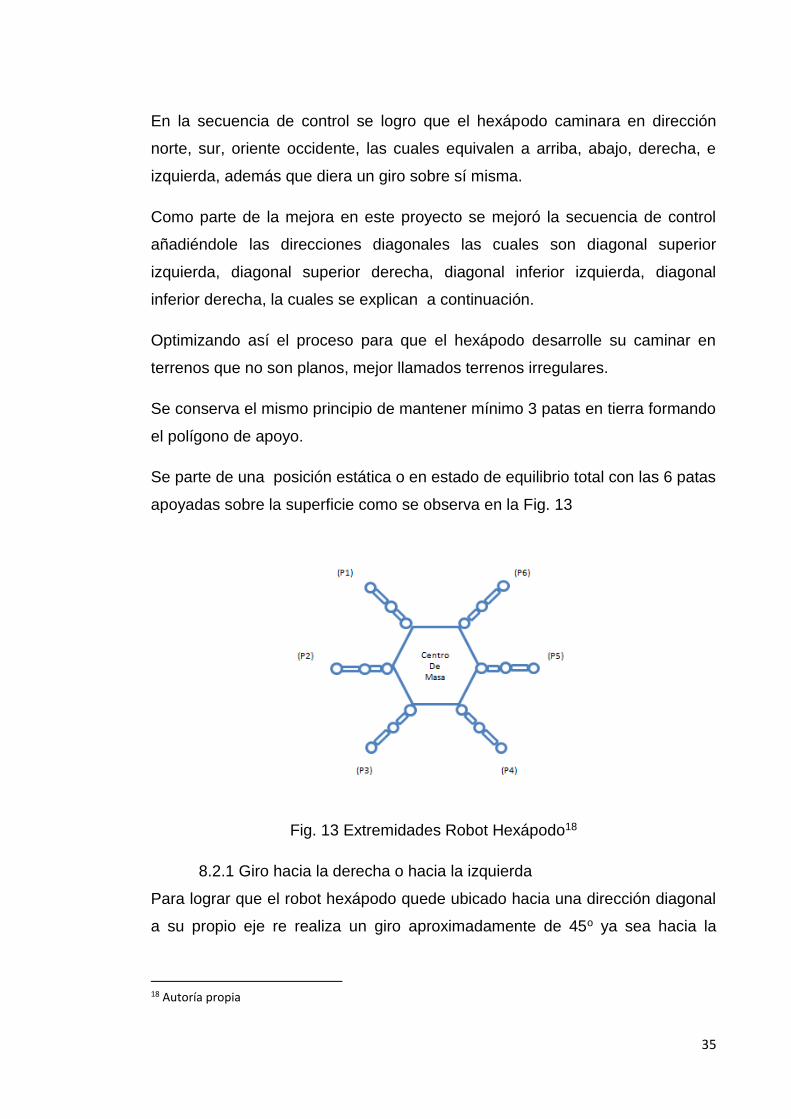
Se conserva el mismo principio de mantener mínimo 3 patas en tierra formando
el polígono de apoyo.
Se parte de una posición estática o en estado de equilibrio total con las 6 patas
apoyadas sobre la superficie como se observa en la Fig. 13
Fig. 13 Extremidades Robot Hexápodo18
8.2.1 Giro hacia la derecha o hacia la izquierda
Para lograr que el robot hexápodo quede ubicado hacia una dirección diagonal
a su propio eje re realiza un giro aproximadamente de 45o ya sea hacia la
18 Autoría propia
36
izquierda o hacia la derecha según la necesidad, después se realiza el
movimiento normal hacia a delante.
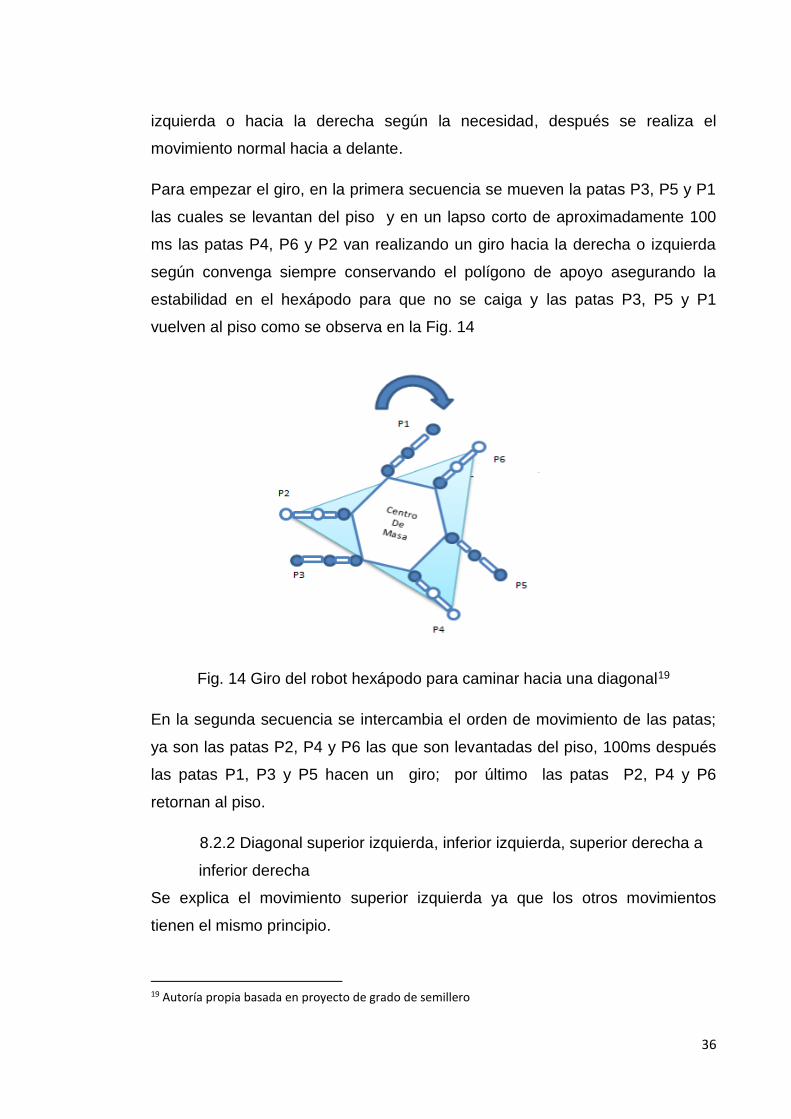
Para empezar el giro, en la primera secuencia se mueven la patas P3, P5 y P1
las cuales se levantan del piso y en un lapso corto de aproximadamente 100
ms las patas P4, P6 y P2 van realizando un giro hacia la derecha o izquierda
según convenga siempre conservando el polígono de apoyo asegurando la
estabilidad en el hexápodo para que no se caiga y las patas P3, P5 y P1
vuelven al piso como se observa en la Fig. 14
Fig. 14 Giro del robot hexápodo para caminar hacia una diagonal19
En la segunda secuencia se intercambia el orden de movimiento de las patas;
ya son las patas P2, P4 y P6 las que son levantadas del piso, 100ms después
las patas P1, P3 y P5 hacen un giro; por último las patas P2, P4 y P6
retornan al piso.
8.2.2 Diagonal superior izquierda, inferior izquierda, superior derecha a
inferior derecha
Se explica el movimiento superior izquierda ya que los otros movimientos
tienen el mismo principio.
19 Autoría propia basada en proyecto de grado de semillero

37
Para empezar el movimiento diagonal superior izquierda, en la primera
secuencia se mueven las patas P1, P3 y P5 las cuales solo son levantadas de
el piso y un lapso corto de tiempo de aproximadamente 100 ms la patas P2,
P4, y P6 hacen un pequeño avance pero siempre formando el polígono de
apoyo asegurando estabilidad para que el hexápodo no se caiga y así
conservando su centro de masa, este movimiento en la programación equivale
a 135o respecto al eje de origen en un plano cartesiano ósea al horizontal o eje
x en sentido contrario a las manecillas del reloj; posteriormente las patas P1,
P3, y P5 que estaban en el aire vuelven apoyarse en el suelo como se observa
en la Fig. 15
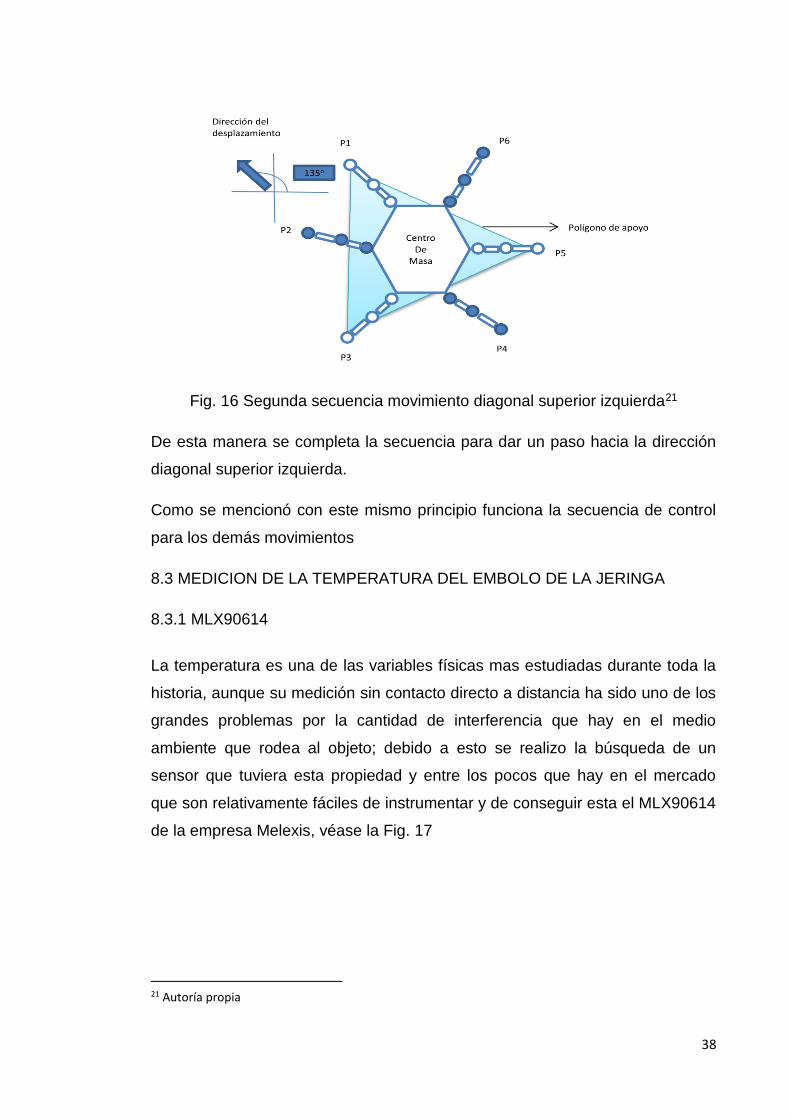
Fig. 15 Primera secuencia movimiento diagonal superior izquierda20
En la segunda secuencia se intercambia el orden de movimiento de las patas;
ya son las patas P2, P4 y P6 las que son levantadas del piso, 100ms después
las patas P1, P3 y P5 hacen un pequeño avance y forman el polígono de
apoyo, siguiendo la dirección de 135o respecto al eje x; por último las patas
P2, P4 y P6 retornan al piso como se observa en la Fig. 16
20 Autoría propia
38
Fig. 16 Segunda secuencia movimiento diagonal superior izquierda21
De esta manera se completa la secuencia para dar un paso hacia la dirección
diagonal superior izquierda.
Como se mencionó con este mismo principio funciona la secuencia de control
para los demás movimientos
8.3 MEDICION DE LA TEMPERATURA DEL EMBOLO DE LA JERINGA
8.3.1 MLX90614
La temperatura es una de las variables físicas mas estudiadas durante toda la
historia, aunque su medición sin contacto directo a distancia ha sido uno de los
grandes problemas por la cantidad de interferencia que hay en el medio
ambiente que rodea al objeto; debido a esto se realizo la búsqueda de un
sensor que tuviera esta propiedad y entre los pocos que hay en el mercado
que son relativamente fáciles de instrumentar y de conseguir esta el MLX90614
de la empresa Melexis, véase la Fig. 17
21 Autoría propia
39
Fig. 17Sensor MLX9061422
Este sensor alcanza medir temperaturas en un rango desde -70oC hasta los
380oC, El elemento sensor en el MLX90614 es un chip de silicio con una fina
membrana micromecanizada sensible a la radiación infrarroja de un objeto
distante. Una etapa de adaptación de medida de la señal amplifica y digitaliza
la señal procedente de la membrana y calcula la temperatura del objeto usando
la calibración configurada en fábrica. La temperatura de salida digital es
linealizada y compensada completamente contra las variaciones de la
temperatura ambiente.
El sensor MLX90614 incorpora amplificadores avanzados de bajo ruido, un
ADC de 17 bits y un potente procesador digital de señales en su chip de
acondicionamiento de señal, a la vez que mantiene una resolución de la
temperatura de 0,02 ºC debido a su resolución se escogió este sensor ya que
se busca encontrar un cambio de temperatura con una diferencia de 0.5 grados
del embolo de la jeringa respecto al entorno que lo rodea.
Dispone de una salida SMBus (compatible con I2C) y puede ser configurado
para una salida PWM de 10bits. (Datasheet MLX90614, 2013)
8.3.1.1 Distribución de los pines
Este sensor solo cuenta con 4 pines como se observa en la Fig. 18, de los
cuales 2 son para su respectiva alimentación, y los otros dos son para la
sincronización y envío de datos
22 Datasheet MLX90614
40
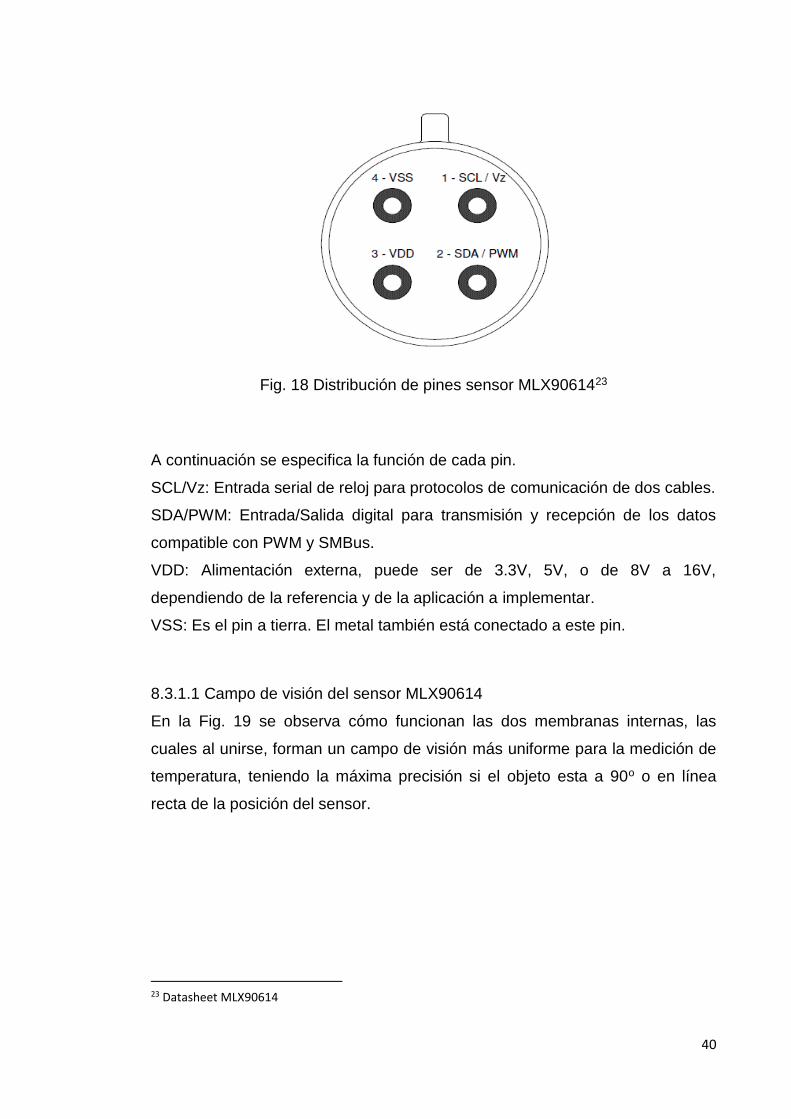
Fig. 18 Distribución de pines sensor MLX9061423
A continuación se especifica la función de cada pin.
SCL/Vz: Entrada serial de reloj para protocolos de comunicación de dos cables.
SDA/PWM: Entrada/Salida digital para transmisión y recepción de los datos
compatible con PWM y SMBus.
VDD: Alimentación externa, puede ser de 3.3V, 5V, o de 8V a 16V,
dependiendo de la referencia y de la aplicación a implementar.
VSS: Es el pin a tierra. El metal también está conectado a este pin.
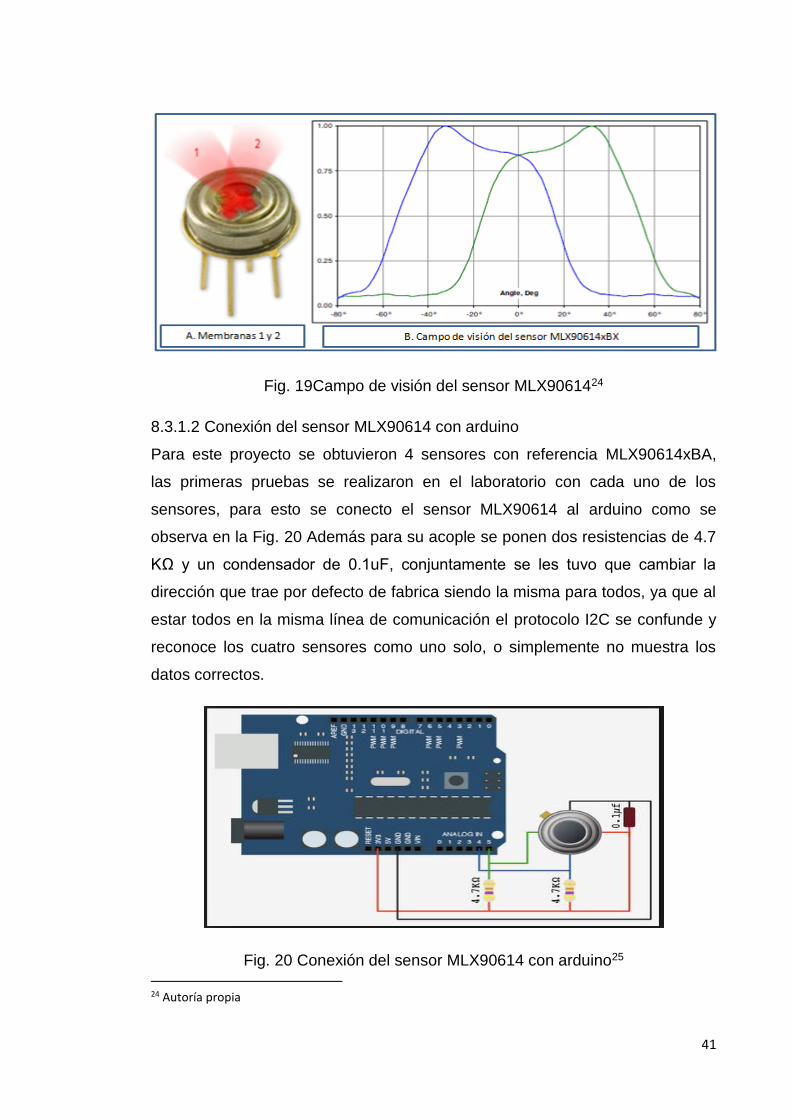
8.3.1.1 Campo de visión del sensor MLX90614
En la Fig. 19 se observa cómo funcionan las dos membranas internas, las
cuales al unirse, forman un campo de visión más uniforme para la medición de
temperatura, teniendo la máxima precisión si el objeto esta a 90o o en línea
recta de la posición del sensor.
23 Datasheet MLX90614
41
Fig. 19Campo de visión del sensor MLX9061424
8.3.1.2 Conexión del sensor MLX90614 con arduino
Para este proyecto se obtuvieron 4 sensores con referencia MLX90614xBA,
las primeras pruebas se realizaron en el laboratorio con cada uno de los
sensores, para esto se conecto el sensor MLX90614 al arduino como se
observa en la Fig. 20 Además para su acople se ponen dos resistencias de 4.7
KΩ y un condensador de 0.1uF, conjuntamente se les tuvo que cambiar la
dirección que trae por defecto de fabrica siendo la misma para todos, ya que al
estar todos en la misma línea de comunicación el protocolo I2C se confunde y
reconoce los cuatro sensores como uno solo, o simplemente no muestra los
datos correctos.
Fig. 20 Conexión del sensor MLX90614 con arduino25
24 Autoría propia
42
Después de asignarle una dirección propia a cada sensor, se programa el
arduino para que los sensores midan la temperatura ambiente, obteniendo
resultados satisfactorios, dependiendo de la variación del aire acondicionado
en el laboratorio que perturbaba la medición del sensor, la temperatura esta
oscilaba entre 23oC y 27oC, cuando el aire acondicionado no variaba, la
temperatura se mantenía constante.
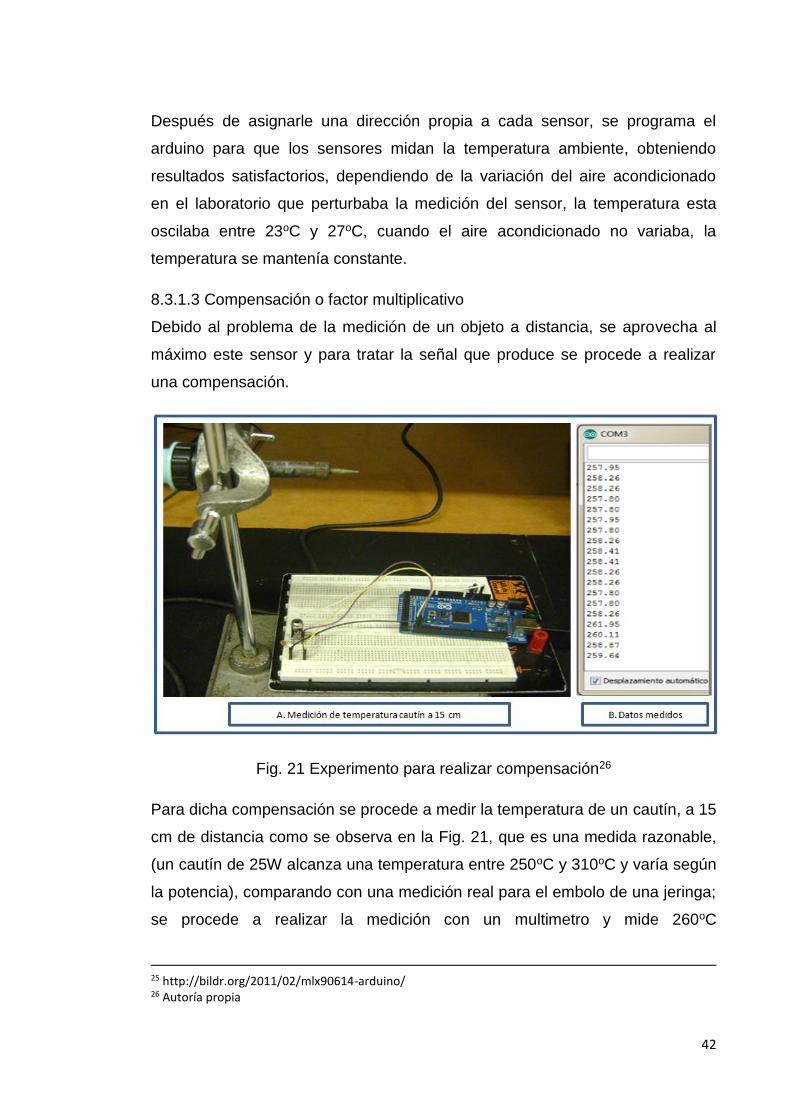
8.3.1.3 Compensación o factor multiplicativo
Debido al problema de la medición de un objeto a distancia, se aprovecha al
máximo este sensor y para tratar la señal que produce se procede a realizar
una compensación.
Fig. 21 Experimento para realizar compensación26
Para dicha compensación se procede a medir la temperatura de un cautín, a 15
cm de distancia como se observa en la Fig. 21, que es una medida razonable,
(un cautín de 25W alcanza una temperatura entre 250oC y 310oC y varía según
la potencia), comparando con una medición real para el embolo de una jeringa;
se procede a realizar la medición con un multimetro y mide 260oC
25 http://bildr.org/2011/02/mlx90614-arduino/ 26 Autoría propia
43
aproximadamente, pero el sensor mide 34oC aproximadamente por lo cual se
aplica la siguiente formula
𝑪𝒐𝒏𝒔𝒕𝒂𝒏𝒕𝒆 𝒅𝒆 𝒄𝒐𝒎𝒑𝒆𝒏𝒔𝒂𝒄𝒊ó𝒏 =𝑽𝒂𝒍𝒐𝒓 𝒓𝒆𝒂𝒍 (𝒎𝒆𝒅𝒊𝒅𝒐 𝒄𝒐𝒏 𝒎𝒖𝒍𝒕𝒊𝒎𝒆𝒕𝒓𝒐)
𝑽𝒂𝒍𝒐𝒓 𝒎𝒆𝒅𝒊𝒅𝒐 𝒄𝒐𝒏 𝒆𝒍 𝒔𝒆𝒏𝒔𝒐𝒓
𝑪𝒐𝒏𝒔𝒕𝒂𝒏𝒕𝒆 𝒅𝒆 𝒄𝒐𝒎𝒑𝒆𝒏𝒔𝒂𝒄𝒊ó𝒏 =𝟐𝟔𝟎𝒐𝑪
𝟑𝟒𝒐𝑪= 𝟕. 𝟕 𝒂𝒑𝒓𝒐𝒙𝒊𝒎𝒂𝒅𝒂𝒎𝒆𝒏𝒕𝒆.
Por último en la programación se multiplica la señal de salida por 7.7 que es la
constante de compensación, esto se hace para cada sensor.
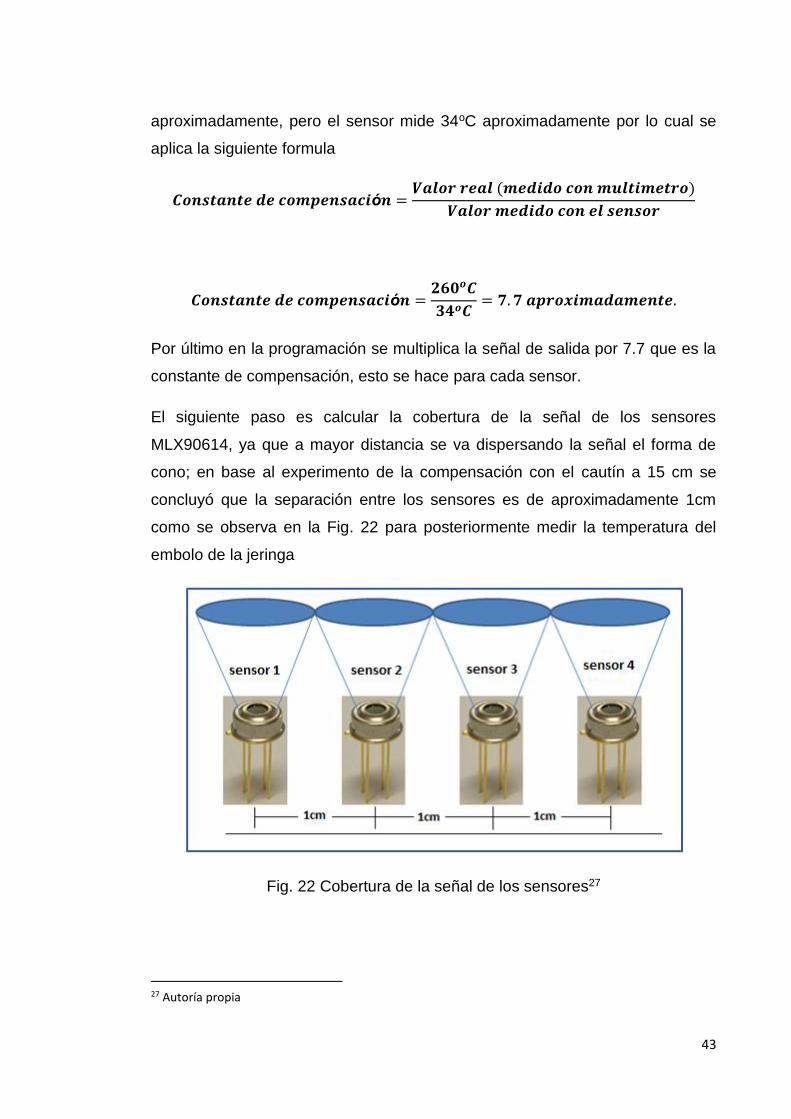
El siguiente paso es calcular la cobertura de la señal de los sensores
MLX90614, ya que a mayor distancia se va dispersando la señal el forma de
cono; en base al experimento de la compensación con el cautín a 15 cm se
concluyó que la separación entre los sensores es de aproximadamente 1cm
como se observa en la Fig. 22 para posteriormente medir la temperatura del
embolo de la jeringa
Fig. 22 Cobertura de la señal de los sensores27
27 Autoría propia
44
8.4 PRUEBAS CON LOS SENSORES MLX90614
8.4.1 Primera Prueba
Para comenzar cabe aclarar que las jeringas se sembraron a comienzos del
mes de julio por lo que estuvieron expuestas al sol, al agua, y diversas
condiciones climáticas simulando las jeringas usadas para dichas minas
antipersona.
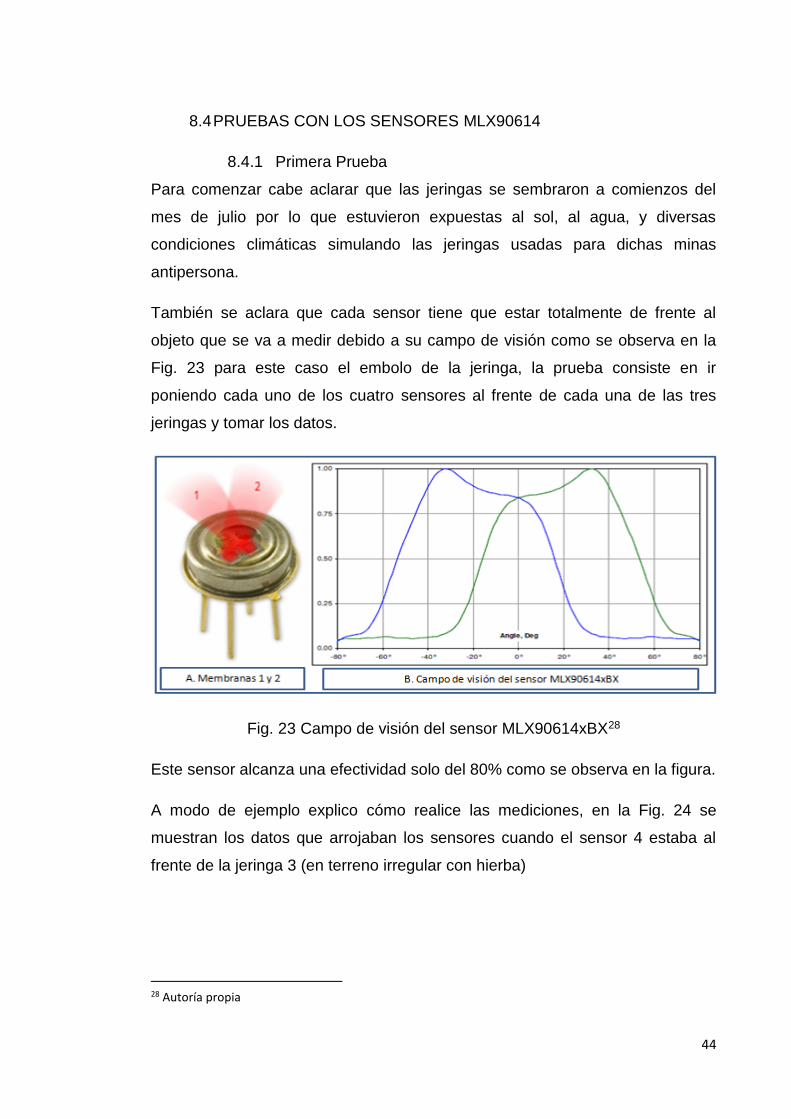
También se aclara que cada sensor tiene que estar totalmente de frente al
objeto que se va a medir debido a su campo de visión como se observa en la
Fig. 23 para este caso el embolo de la jeringa, la prueba consiste en ir
poniendo cada uno de los cuatro sensores al frente de cada una de las tres
jeringas y tomar los datos.
Fig. 23 Campo de visión del sensor MLX90614xBX28
Este sensor alcanza una efectividad solo del 80% como se observa en la figura.
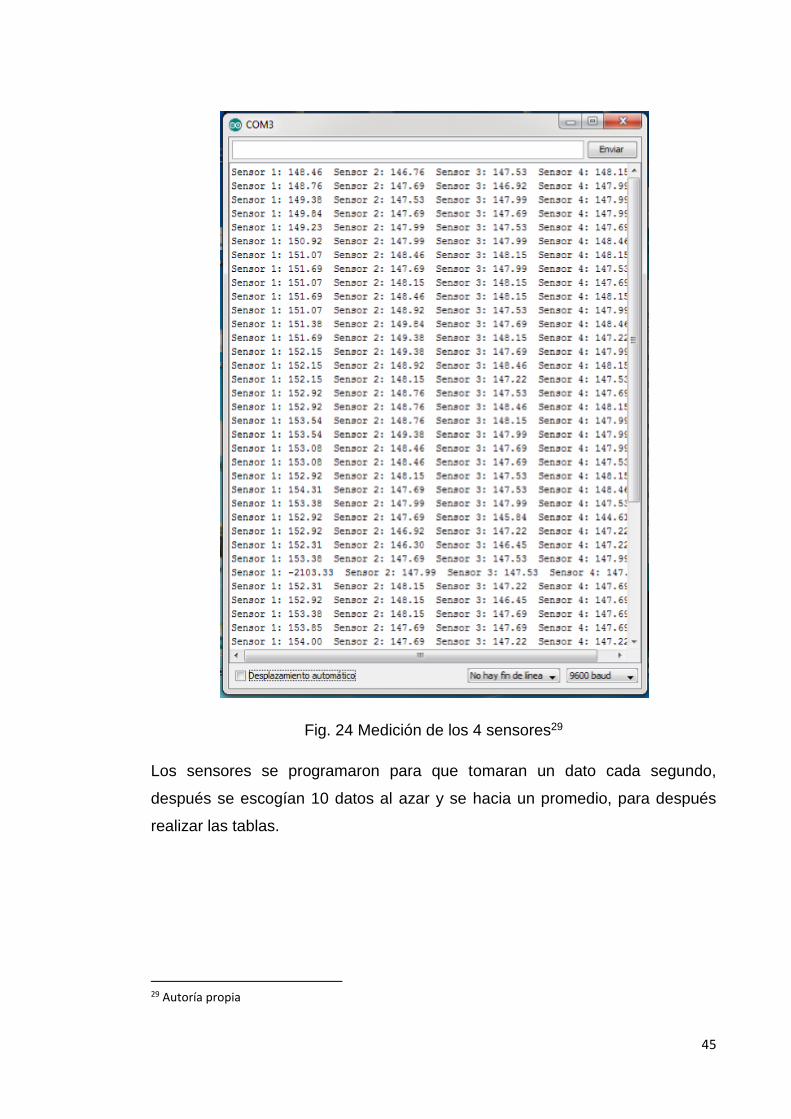
A modo de ejemplo explico cómo realice las mediciones, en la Fig. 24 se
muestran los datos que arrojaban los sensores cuando el sensor 4 estaba al
frente de la jeringa 3 (en terreno irregular con hierba)
28 Autoría propia
45
Fig. 24 Medición de los 4 sensores29
Los sensores se programaron para que tomaran un dato cada segundo,
después se escogían 10 datos al azar y se hacia un promedio, para después
realizar las tablas.
29 Autoría propia

46
8.4.1.1 Jeringa 1 (En terreno plano y pasto despejado)
Al momento de sembrarse (Julio) Fig. 25
Fig. 25 Jeringa 1 al momento de sembrarse 30
Al momento de medir (Diciembre) Fig. 26
Fig. 26 Jeringa 1 al momento de medir31
Se asegura que el sensor este a 15 cms de la jeringa con un metro
30 Autoría propia 31 Autoría propia
47
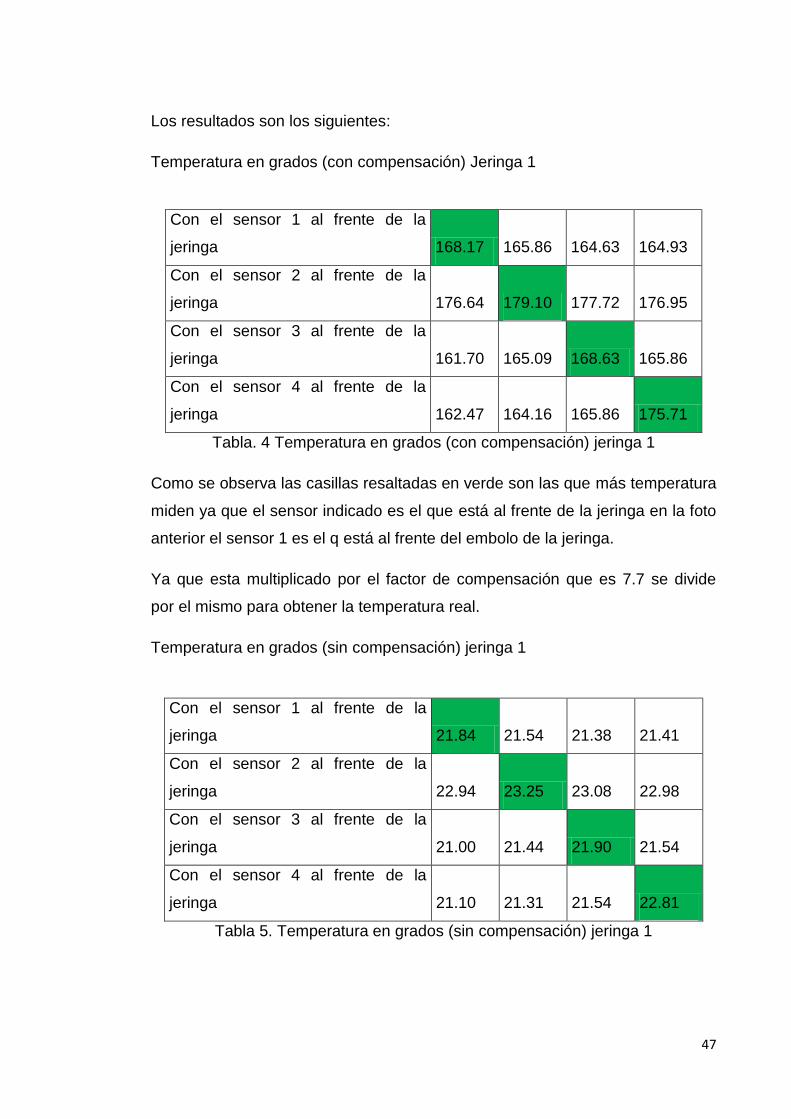
Los resultados son los siguientes:
Temperatura en grados (con compensación) Jeringa 1
Con el sensor 1 al frente de la
jeringa 168.17 165.86 164.63 164.93
Con el sensor 2 al frente de la
jeringa 176.64 179.10 177.72 176.95
Con el sensor 3 al frente de la
jeringa 161.70 165.09 168.63 165.86
Con el sensor 4 al frente de la
jeringa 162.47 164.16 165.86 175.71
Tabla. 4 Temperatura en grados (con compensación) jeringa 1
Como se observa las casillas resaltadas en verde son las que más temperatura
miden ya que el sensor indicado es el que está al frente de la jeringa en la foto
anterior el sensor 1 es el q está al frente del embolo de la jeringa.
Ya que esta multiplicado por el factor de compensación que es 7.7 se divide
por el mismo para obtener la temperatura real.
Temperatura en grados (sin compensación) jeringa 1
Con el sensor 1 al frente de la
jeringa 21.84 21.54 21.38 21.41
Con el sensor 2 al frente de la
jeringa 22.94 23.25 23.08 22.98
Con el sensor 3 al frente de la
jeringa 21.00 21.44 21.90 21.54
Con el sensor 4 al frente de la
jeringa 21.10 21.31 21.54 22.81
Tabla 5. Temperatura en grados (sin compensación) jeringa 1
48
Se realiza una resta para saber la diferencia en grados en cuanto al sensor
referente respecto a los otros.
Diferencia
sensor 1 respecto los demás 0.0 0.3 0.46 0.43
sensor 2 respecto los demás 0.31 0.0 0.17 0.27
sensor 3 respecto los demás 0.9 0.46 0.0 0.36
sensor 4 respecto los demás 1.71 1.5 1.27 0.0
Tabla 6. Diferencia grados de temperatura jeringa 1
Se observan diferentes cambios en la medición de temperatura, no de 0.5
como es la hipótesis planteada, sino que varía un poco más o un poco menos
excepto el sensor 4 que varia demasiado.
Este mismo procedimiento se realiza con las jeringas 2 y 3
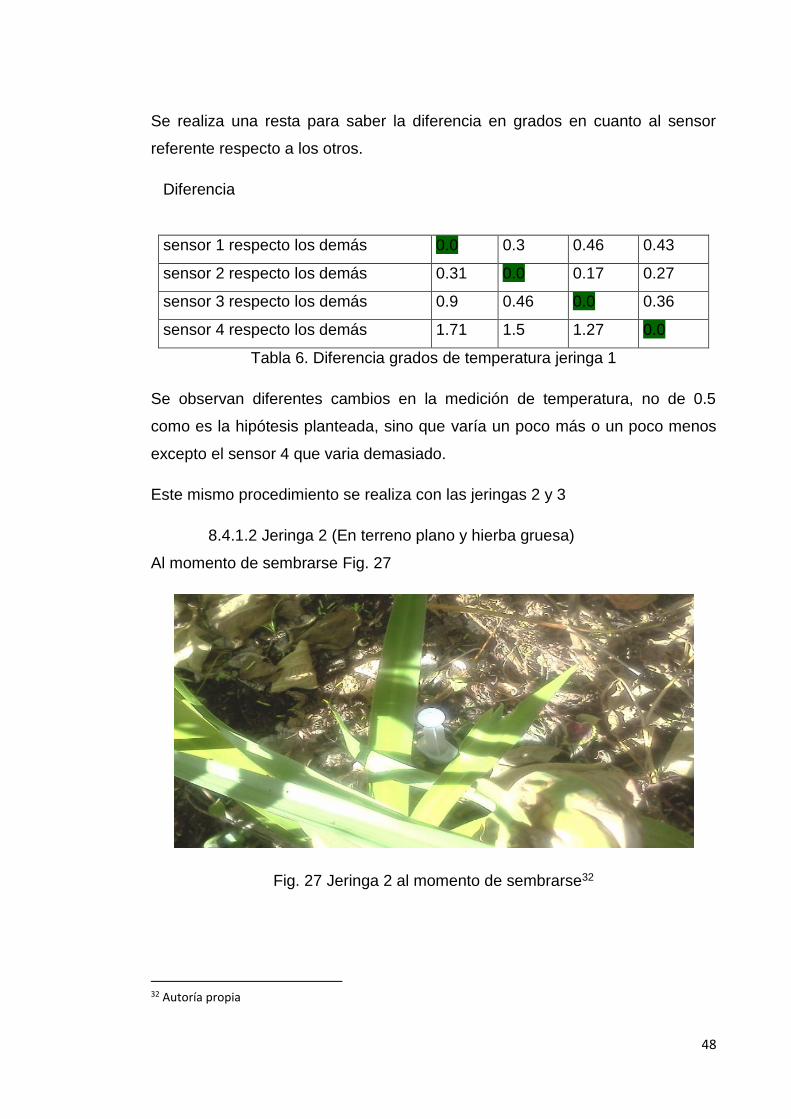
8.4.1.2 Jeringa 2 (En terreno plano y hierba gruesa)
Al momento de sembrarse Fig. 27
Fig. 27 Jeringa 2 al momento de sembrarse32
32 Autoría propia
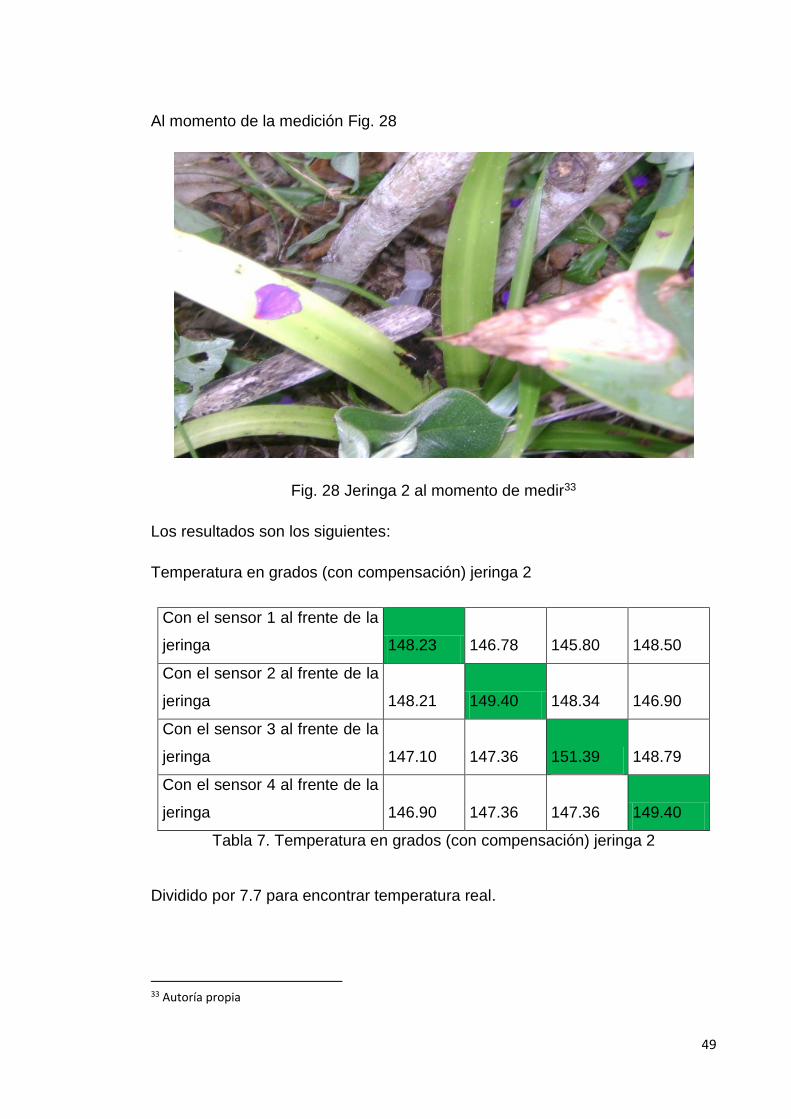
49
Al momento de la medición Fig. 28
Fig. 28 Jeringa 2 al momento de medir33
Los resultados son los siguientes:
Temperatura en grados (con compensación) jeringa 2
Con el sensor 1 al frente de la
jeringa 148.23 146.78 145.80 148.50
Con el sensor 2 al frente de la
jeringa 148.21 149.40 148.34 146.90
Con el sensor 3 al frente de la
jeringa 147.10 147.36 151.39 148.79
Con el sensor 4 al frente de la
jeringa 146.90 147.36 147.36 149.40
Tabla 7. Temperatura en grados (con compensación) jeringa 2
Dividido por 7.7 para encontrar temperatura real.
33 Autoría propia
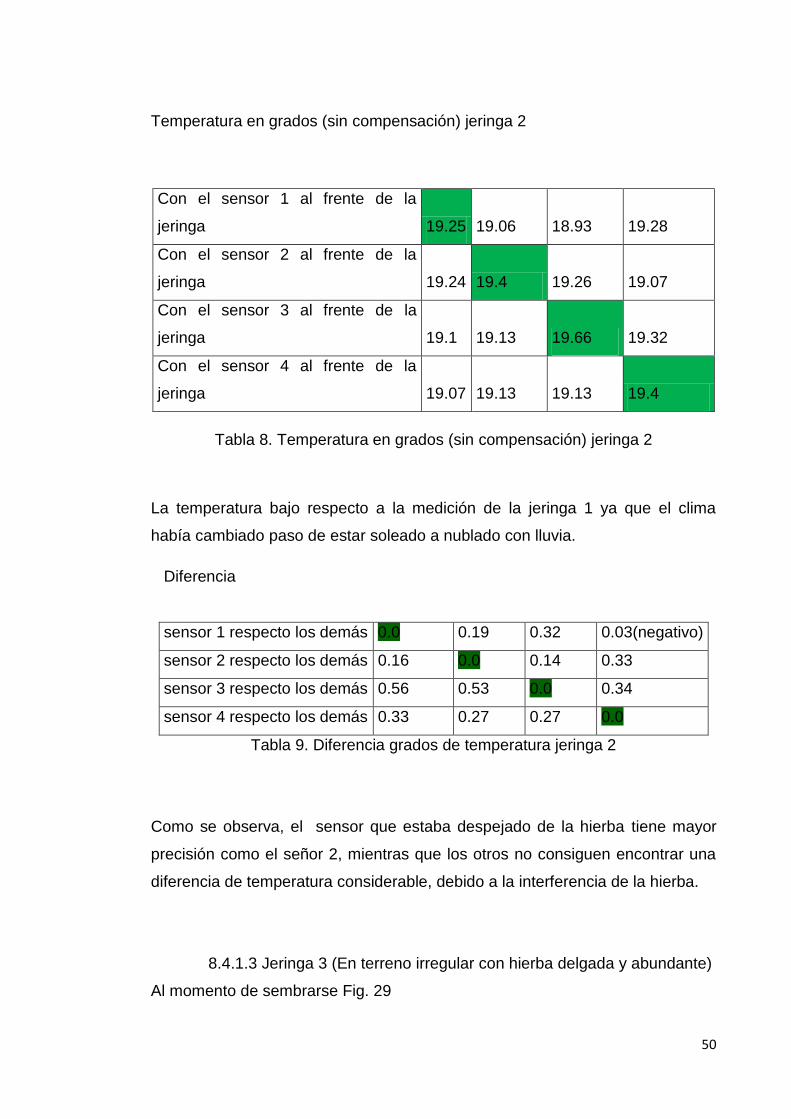
50
Temperatura en grados (sin compensación) jeringa 2
Con el sensor 1 al frente de la
jeringa 19.25 19.06 18.93 19.28
Con el sensor 2 al frente de la
jeringa 19.24 19.4 19.26 19.07
Con el sensor 3 al frente de la
jeringa 19.1 19.13 19.66 19.32
Con el sensor 4 al frente de la
jeringa 19.07 19.13 19.13 19.4
Tabla 8. Temperatura en grados (sin compensación) jeringa 2
La temperatura bajo respecto a la medición de la jeringa 1 ya que el clima
había cambiado paso de estar soleado a nublado con lluvia.
Diferencia
sensor 1 respecto los demás 0.0 0.19 0.32 0.03(negativo)
sensor 2 respecto los demás 0.16 0.0 0.14 0.33
sensor 3 respecto los demás 0.56 0.53 0.0 0.34
sensor 4 respecto los demás 0.33 0.27 0.27 0.0
Tabla 9. Diferencia grados de temperatura jeringa 2
Como se observa, el sensor que estaba despejado de la hierba tiene mayor
precisión como el señor 2, mientras que los otros no consiguen encontrar una
diferencia de temperatura considerable, debido a la interferencia de la hierba.
8.4.1.3 Jeringa 3 (En terreno irregular con hierba delgada y abundante)
Al momento de sembrarse Fig. 29
51
Fig. 29 Jeringa 3 al momento de sembrarse34
Al momento de la medición Fig. 30
Fig. 30 Jeringa al momento de medir35
La hierba creció mucho, y la jeringa casi no se nota, por eso se resalta en el
cuadro, al hacer un acercamiento se observa así Fig. 31
34 Autoría propia 35 Autoría propia
52
Fig. 31 Acercamiento a la jeringa 336
Y se procede a la medición como se observa en la Fig. 32
Fig. 32 Mediciones jeringa 337
36 Autoría propia 37 Autoría propia
53
Los resultados son los siguientes:
Temperatura en grados (con compensación) jeringa 3
Con el sensor 1 al frente de la
jeringa 145.84 145.53 145.84 146.76
Con el sensor 2 al frente de la
jeringa 146.76 147.53 146.76 146.76
Con el sensor 3 al frente de la
jeringa 147.22 146.45 147.99 146.92
Con el sensor 4 al frente de la
jeringa 148.76 147.69 146.92 147.99
Tabla 10. Temperatura en grados (con compensación) jeringa 3
Dividido por 7.7 para encontrar la temperatura real
Temperatura en grados (sin compensación) jeringa 3
Con el sensor 1 al frente de la
jeringa 18.94 18.90 18.94 19.05
Con el sensor 2 al frente de la
jeringa 19.05 19.15 19.05 19.05
Con el sensor 3 al frente de la
jeringa 19.11 19.01 19.21 19.08
Con el sensor 4 al frente de la
jeringa 19.31 19.18 19.08 19.21
Tabla 11. Temperatura en grados (sin compensación) jeringa 3
54
Diferencia
sensor 1 respecto los demás 0.0 0.04 0.0 0.11(negativo)
sensor 2 respecto los demás 0.1 0.1 0.1 0.1
sensor 3 respecto los demás 0.1 0.2 0.0 0.13
sensor 4 respecto los demás 0.1(negativo) 0.03 0.13 0.0
Tabla 12. Diferencia grados de temperatura jeringa 3
Debido a tanta hierba esta interfiere con la medición de los sensores por lo
tanto las mediciones no son precisas y el cambio de temperatura es casi
indetectable.
Se puede concluir que el clima del día afecta demasiado las mediciones;
dependiendo si el día esta soleado o nublado arroja diferentes mediciones,
pero los sensores pueden detectar este cambio
La hierba es otro de los factores que más afecta las mediciones, ya que estos
sensores miden la temperatura de un objeto, y si la hierba se interpone en esta
medición el sensor no alcanza a medir la temperatura del embolo de la jeringa
si no la temperatura de la hierba.
Esta metodología está arrojando resultados satisfactorios, hay que recalcar que
cuando hay demasiada hierba no funciona, solo funciona si el alrededor de la
jeringa está despejado o semidespejado dependiendo del ángulo de la
medición.
Estas son solo las primeras pruebas, debido a que es un proyecto de semillero
está sujeto a varias mediciones por parte de las personas que continúan con la
investigación.
55
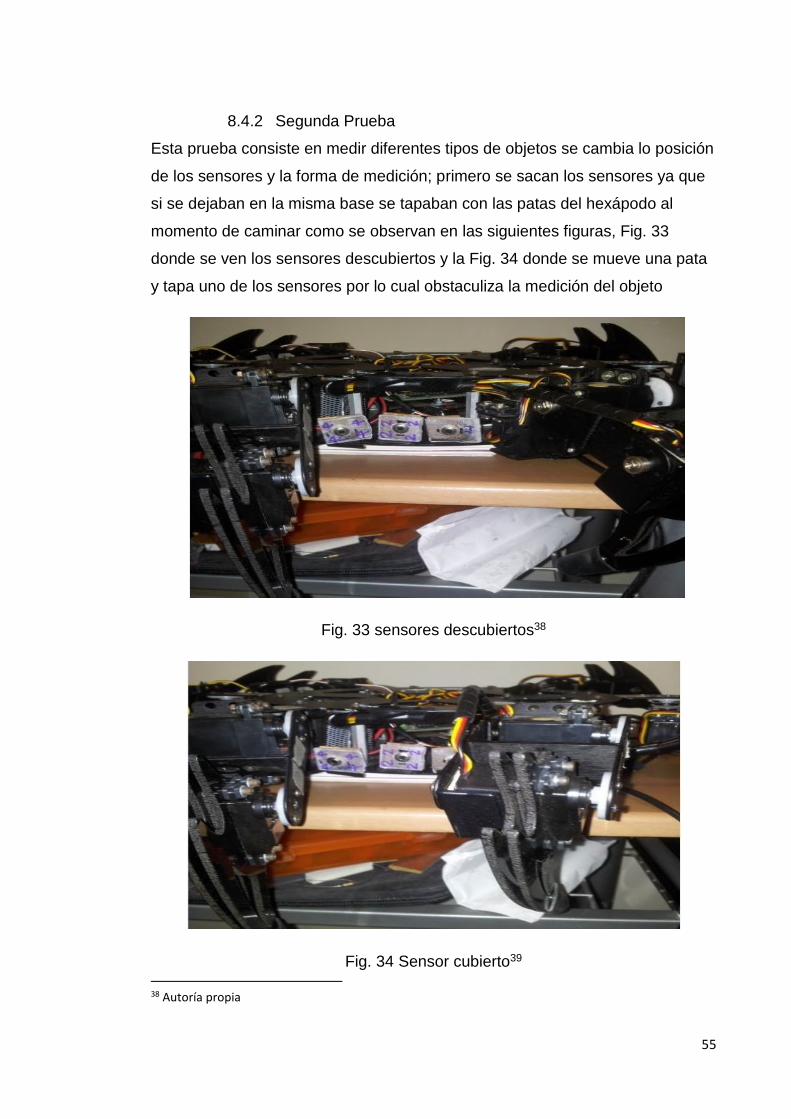
8.4.2 Segunda Prueba
Esta prueba consiste en medir diferentes tipos de objetos se cambia lo posición
de los sensores y la forma de medición; primero se sacan los sensores ya que
si se dejaban en la misma base se tapaban con las patas del hexápodo al
momento de caminar como se observan en las siguientes figuras, Fig. 33
donde se ven los sensores descubiertos y la Fig. 34 donde se mueve una pata
y tapa uno de los sensores por lo cual obstaculiza la medición del objeto
Fig. 33 sensores descubiertos38
Fig. 34 Sensor cubierto39 38 Autoría propia
56
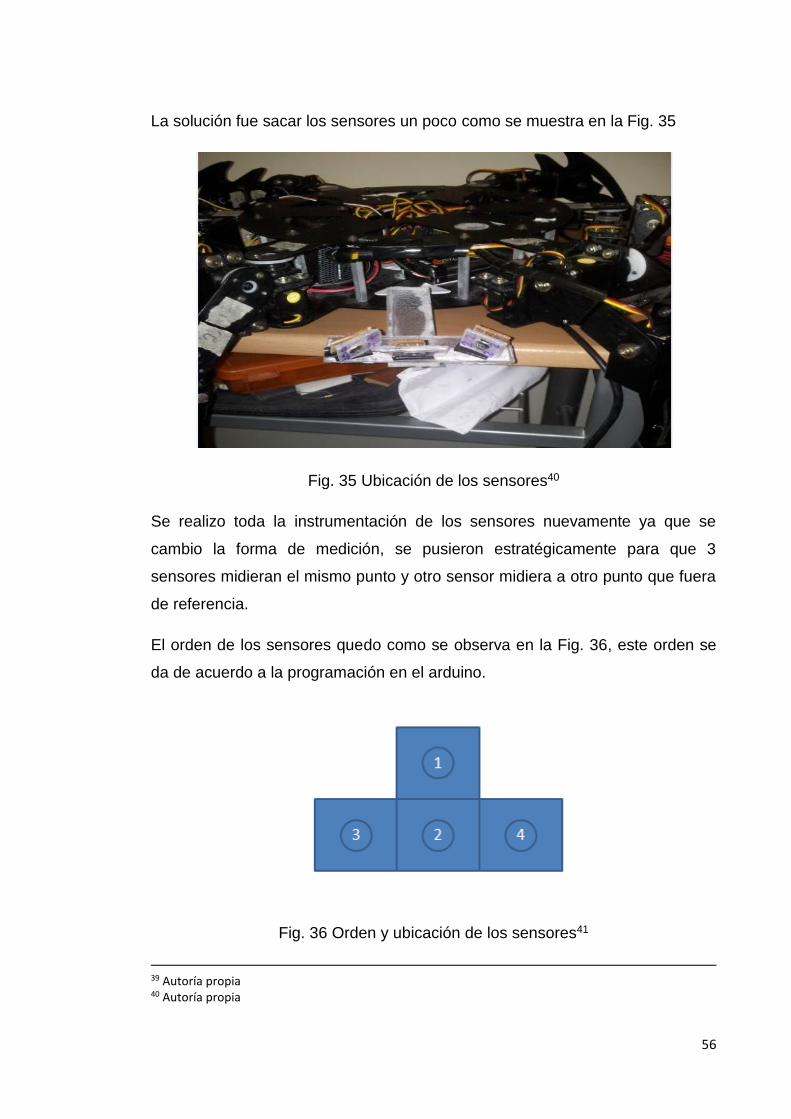
La solución fue sacar los sensores un poco como se muestra en la Fig. 35
Fig. 35 Ubicación de los sensores40
Se realizo toda la instrumentación de los sensores nuevamente ya que se
cambio la forma de medición, se pusieron estratégicamente para que 3
sensores midieran el mismo punto y otro sensor midiera a otro punto que fuera
de referencia.
El orden de los sensores quedo como se observa en la Fig. 36, este orden se
da de acuerdo a la programación en el arduino.
Fig. 36 Orden y ubicación de los sensores41
39 Autoría propia 40 Autoría propia
57
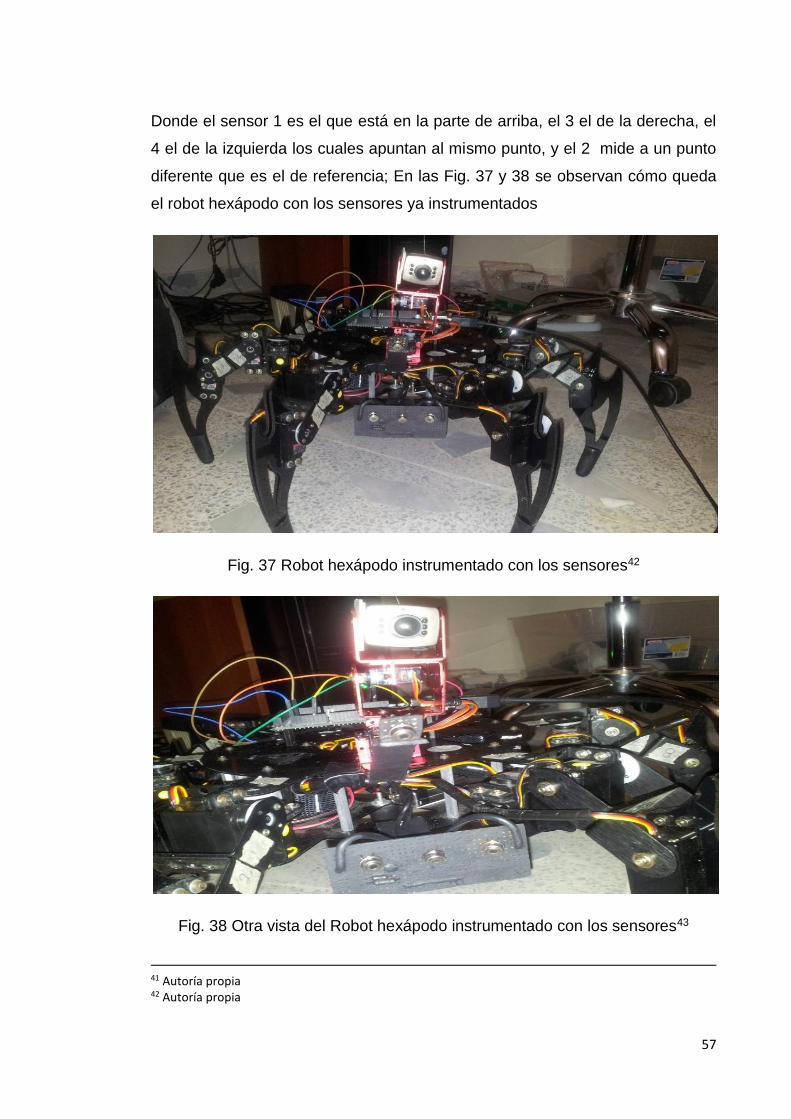
Donde el sensor 1 es el que está en la parte de arriba, el 3 el de la derecha, el
4 el de la izquierda los cuales apuntan al mismo punto, y el 2 mide a un punto
diferente que es el de referencia; En las Fig. 37 y 38 se observan cómo queda
el robot hexápodo con los sensores ya instrumentados
Fig. 37 Robot hexápodo instrumentado con los sensores42
Fig. 38 Otra vista del Robot hexápodo instrumentado con los sensores43
41 Autoría propia 42 Autoría propia
58
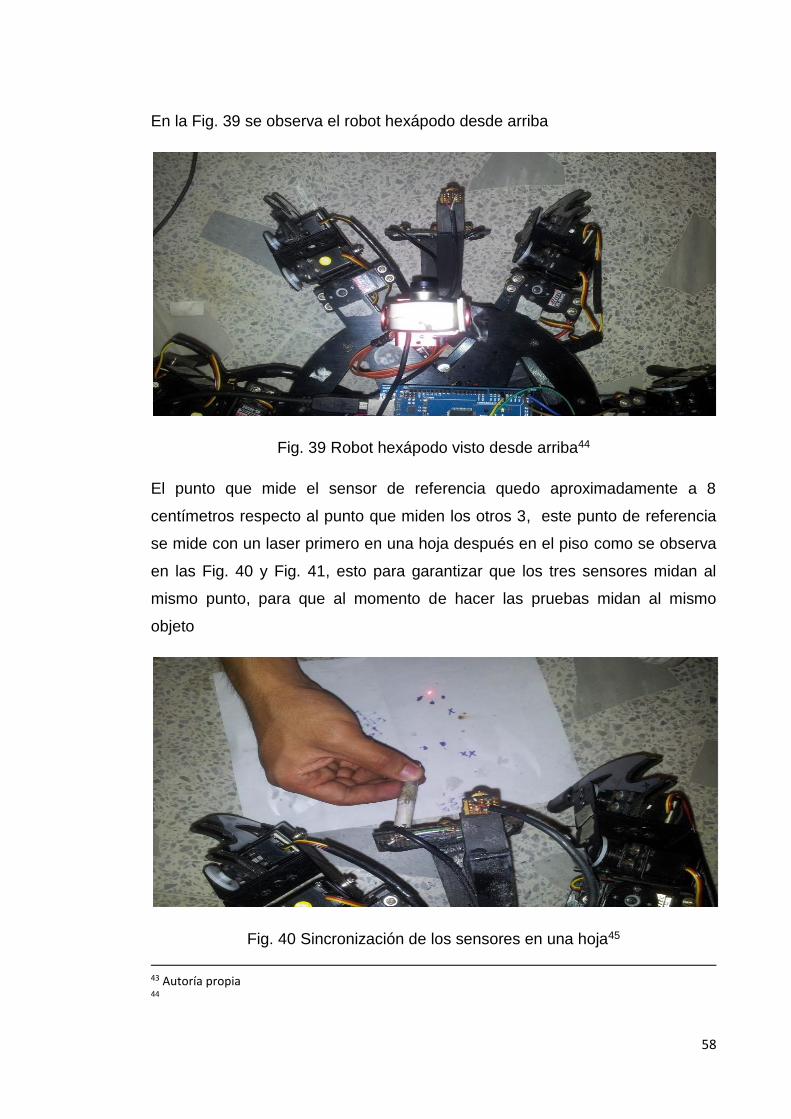
En la Fig. 39 se observa el robot hexápodo desde arriba
Fig. 39 Robot hexápodo visto desde arriba44
El punto que mide el sensor de referencia quedo aproximadamente a 8
centímetros respecto al punto que miden los otros 3, este punto de referencia
se mide con un laser primero en una hoja después en el piso como se observa
en las Fig. 40 y Fig. 41, esto para garantizar que los tres sensores midan al
mismo punto, para que al momento de hacer las pruebas midan al mismo
objeto
Fig. 40 Sincronización de los sensores en una hoja45
43 Autoría propia 44
59
Fig. 41 Sincronización de los sensores en el piso46
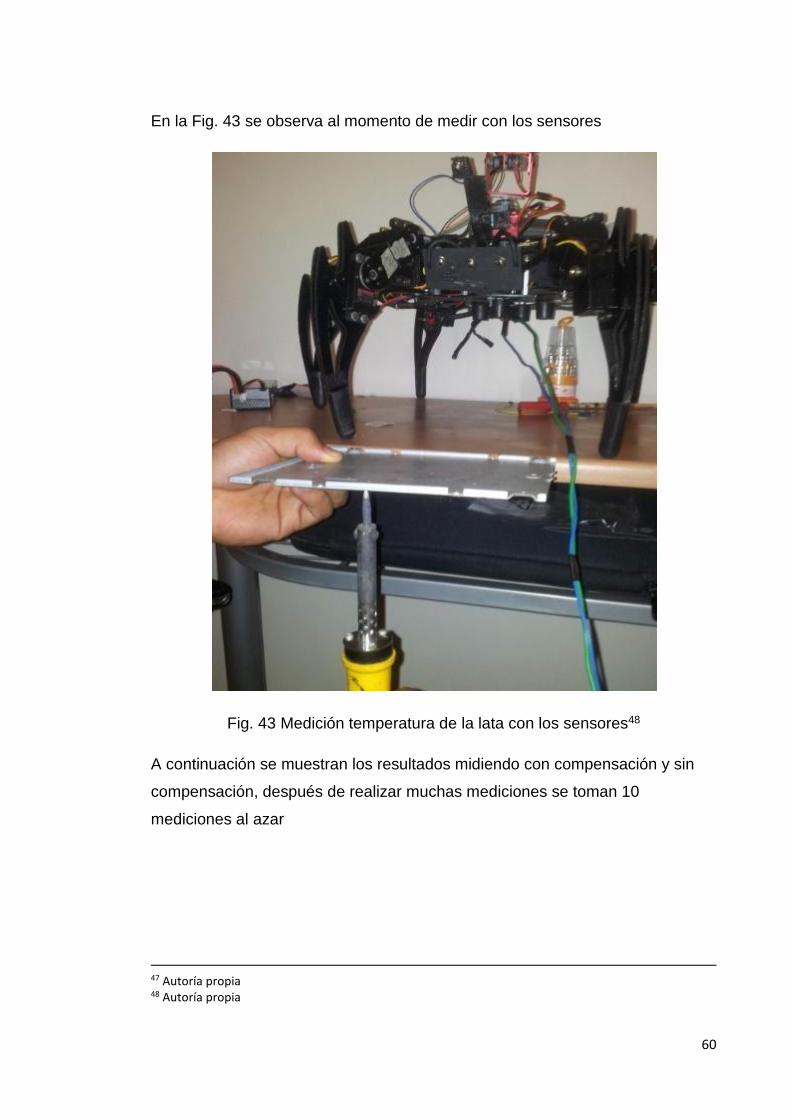
8.4.2.1 Prueba 1, Punta del cautín calentando una lata
Medida con termocupla, se observa en la Fig. 42 que la medición es
aproximadamente 80 grados centígrados, (así se realizan todas las pruebas
primero con una termocupla para estar seguros de que los sensores si midan
un valor aproximado)
Fig. 42 Medición con termocupla y multimetro47
45 Autoría propia 46 Autoría propia
60
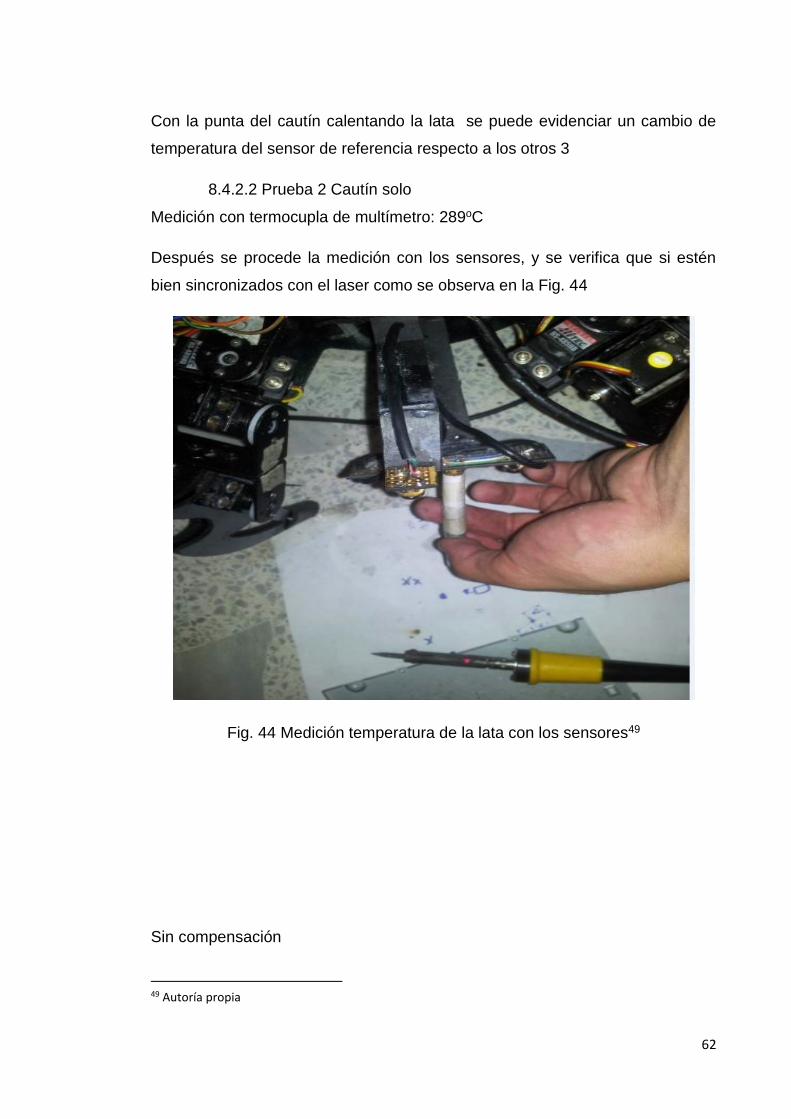
En la Fig. 43 se observa al momento de medir con los sensores
Fig. 43 Medición temperatura de la lata con los sensores48
A continuación se muestran los resultados midiendo con compensación y sin
compensación, después de realizar muchas mediciones se toman 10
mediciones al azar
47 Autoría propia 48 Autoría propia

61
Sin compensación
sensor 1 sensor 2 sensor 3 sensor 4
31.98 31.38 31.94 31.66
31.94 31.42 31.82 31.70
31.94 31.40 31.88 31.80
32.02 31.52 31.84 31.70
31.94 31.46 31.82 31.82
31.90 31.42 31.42 31.76
31.80 31.46 31.84 31.90
31.84 31.52 31.90 31.76
31.76 31.52 31.90 31.76
31.90 31.48 31.82 31.66
Tabla 13. Medición temperatura de la lata sin compensación
Con compensación
sensor 1 sensor 2 sensor 3 sensor 4
86.51 85.55 86.61 86.29
86.13 85.49 86.29 86.29
86.29 84.91 86.35 86.08
86.45 85.01 86.13 86.08
86.24 84.96 86.29 86.08
86.08 85.01 86.13 85.87
86.13 84.53 85.97 85.71
85.76 84.64 86.08 85.87
85.76 84.64 86.08 85.76
85.97 84.53 85.76 85.76
Tabla 14. Medición temperatura de la lata con compensación
62
Con la punta del cautín calentando la lata se puede evidenciar un cambio de
temperatura del sensor de referencia respecto a los otros 3
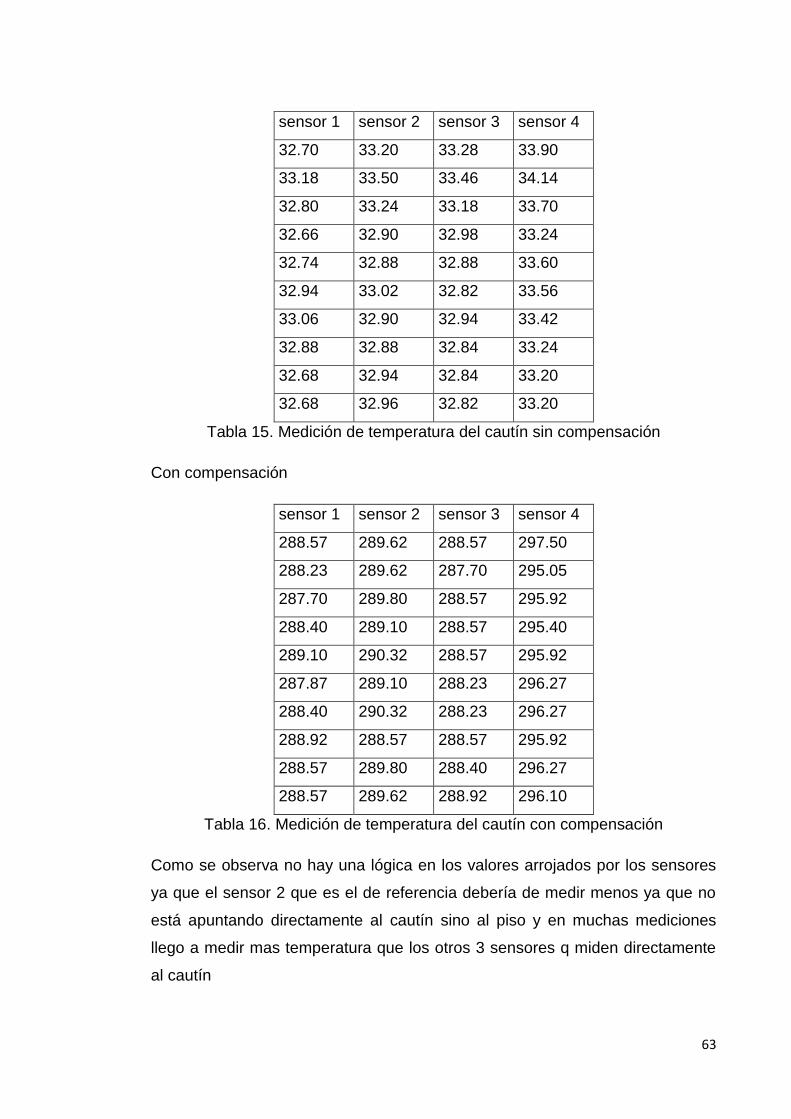
8.4.2.2 Prueba 2 Cautín solo
Medición con termocupla de multímetro: 289oC
Después se procede la medición con los sensores, y se verifica que si estén
bien sincronizados con el laser como se observa en la Fig. 44
Fig. 44 Medición temperatura de la lata con los sensores49
Sin compensación
49 Autoría propia
63
sensor 1 sensor 2 sensor 3 sensor 4
32.70 33.20 33.28 33.90
33.18 33.50 33.46 34.14
32.80 33.24 33.18 33.70
32.66 32.90 32.98 33.24
32.74 32.88 32.88 33.60
32.94 33.02 32.82 33.56
33.06 32.90 32.94 33.42
32.88 32.88 32.84 33.24
32.68 32.94 32.84 33.20
32.68 32.96 32.82 33.20
Tabla 15. Medición de temperatura del cautín sin compensación
Con compensación
sensor 1 sensor 2 sensor 3 sensor 4
288.57 289.62 288.57 297.50
288.23 289.62 287.70 295.05
287.70 289.80 288.57 295.92
288.40 289.10 288.57 295.40
289.10 290.32 288.57 295.92
287.87 289.10 288.23 296.27
288.40 290.32 288.23 296.27
288.92 288.57 288.57 295.92
288.57 289.80 288.40 296.27
288.57 289.62 288.92 296.10
Tabla 16. Medición de temperatura del cautín con compensación
Como se observa no hay una lógica en los valores arrojados por los sensores
ya que el sensor 2 que es el de referencia debería de medir menos ya que no
está apuntando directamente al cautín sino al piso y en muchas mediciones
llego a medir mas temperatura que los otros 3 sensores q miden directamente
al cautín
64
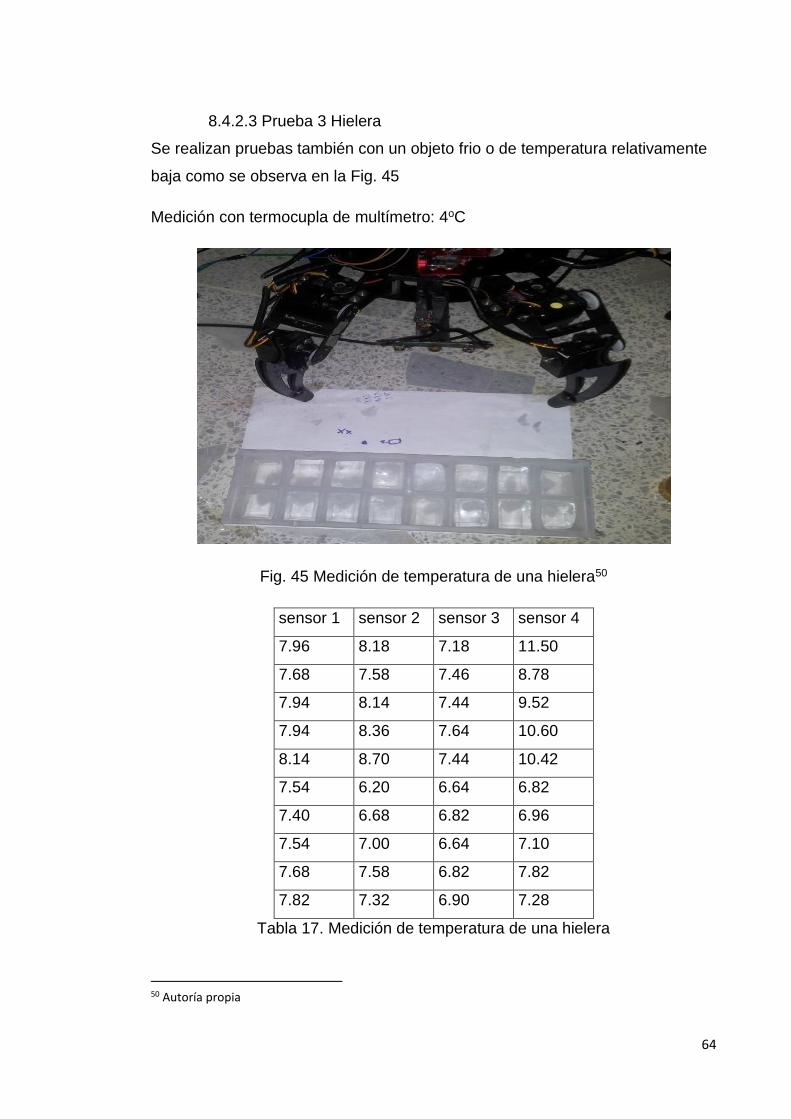
8.4.2.3 Prueba 3 Hielera
Se realizan pruebas también con un objeto frio o de temperatura relativamente
baja como se observa en la Fig. 45
Medición con termocupla de multímetro: 4oC
Fig. 45 Medición de temperatura de una hielera50
sensor 1 sensor 2 sensor 3 sensor 4
7.96 8.18 7.18 11.50
7.68 7.58 7.46 8.78
7.94 8.14 7.44 9.52
7.94 8.36 7.64 10.60
8.14 8.70 7.44 10.42
7.54 6.20 6.64 6.82
7.40 6.68 6.82 6.96
7.54 7.00 6.64 7.10
7.68 7.58 6.82 7.82
7.82 7.32 6.90 7.28
Tabla 17. Medición de temperatura de una hielera
50 Autoría propia

65
Se evidencia que los sensores entre más cerca del objeto son más precisos,
pero la distancia tiene que ser de 2 o 3 centímetros.
8.4.2.4 Prueba 4 Jeringa
La jeringa esta a la misma temperatura que el ambiente en este caso se
calienta un poco para verificar el cambio de temperatura como se observa en la
Fig. 46
Fig. 46 Medición de temperatura de una jeringa51
sensor 1 sensor 2 sensor 3 sensor 4
27.84 26.90 27.30 27.02
27.74 26.92 27.36 27.02
27.60 26.92 27.40 26.96
27.62 26.90 27.30 26.96
27.62 26.84 27.34 27.02
27.68 26.86 27.34 26.96
27.66 26.82 27.30 26.98
27.54 26.90 27.30 26.92
27.60 26.86 27.40 26.98
27.62 26.96 27.34 27.02
Tabla 18. Medición de temperatura de una jeringa
51 Autoría propia
66
Muestra datos aparentemente coherentes pues el sensor 2 mide menos
temperatura.
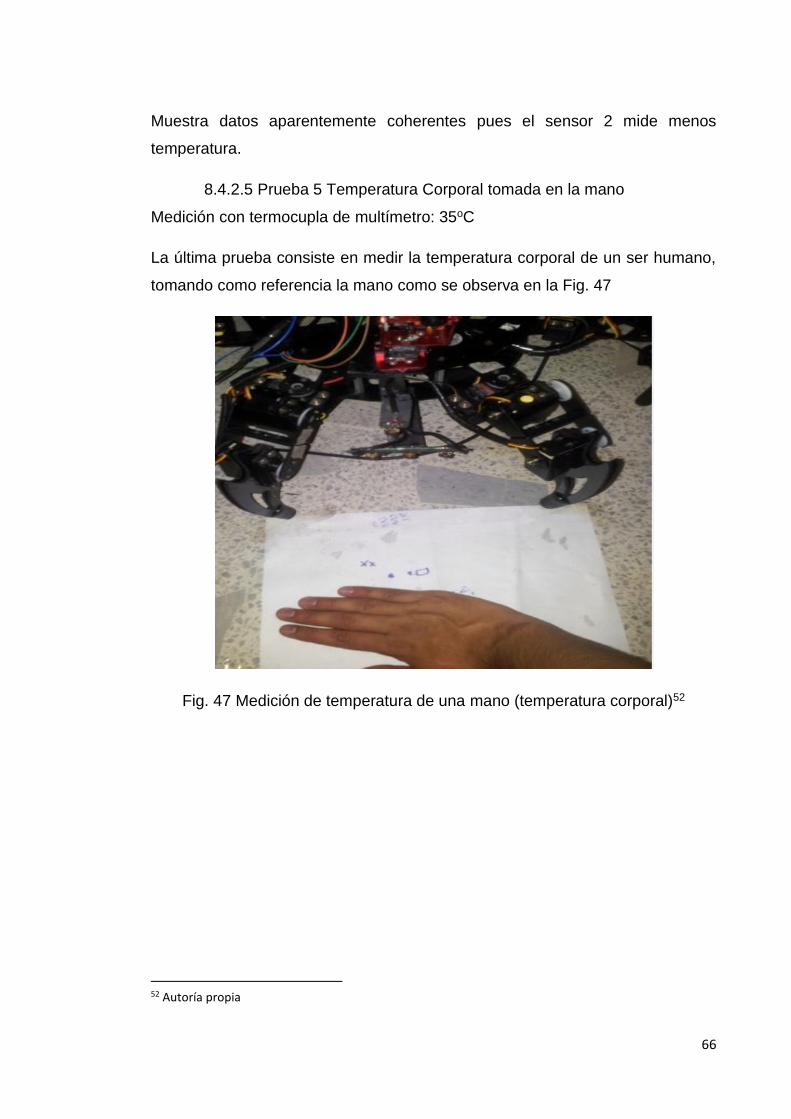
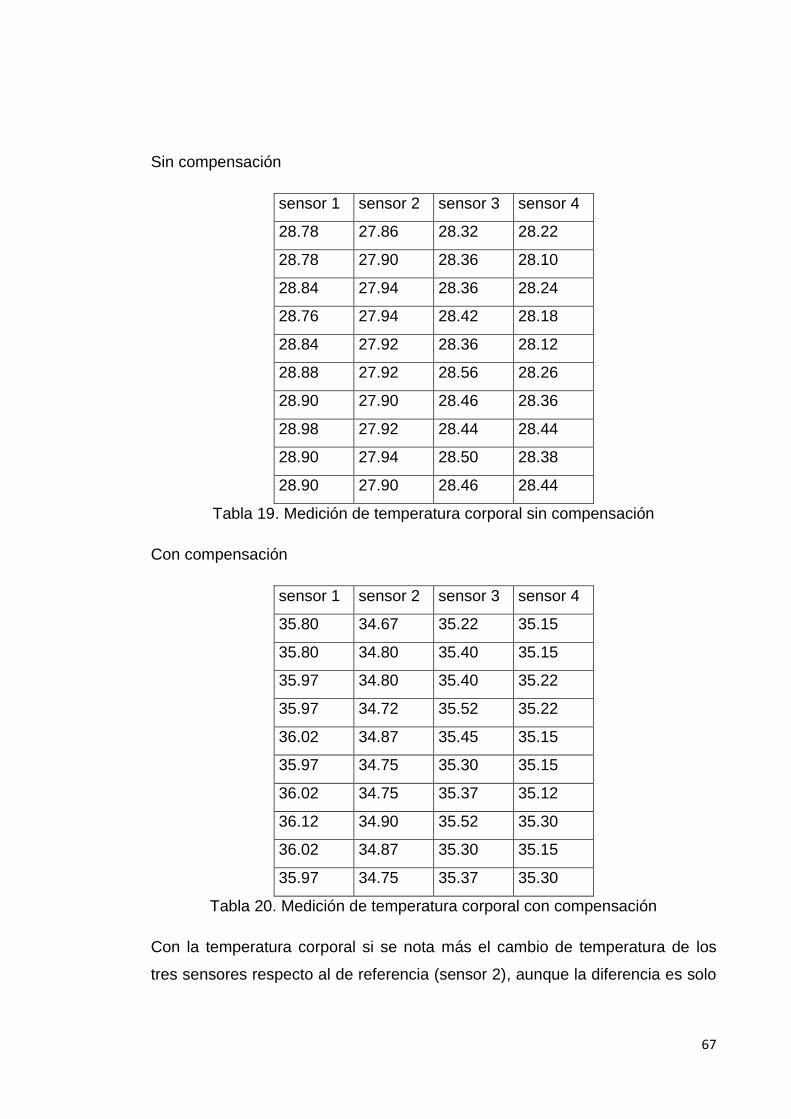
8.4.2.5 Prueba 5 Temperatura Corporal tomada en la mano
Medición con termocupla de multímetro: 35oC
La última prueba consiste en medir la temperatura corporal de un ser humano,
tomando como referencia la mano como se observa en la Fig. 47
Fig. 47 Medición de temperatura de una mano (temperatura corporal)52
52 Autoría propia
67
Sin compensación
sensor 1 sensor 2 sensor 3 sensor 4
28.78 27.86 28.32 28.22
28.78 27.90 28.36 28.10
28.84 27.94 28.36 28.24
28.76 27.94 28.42 28.18
28.84 27.92 28.36 28.12
28.88 27.92 28.56 28.26
28.90 27.90 28.46 28.36
28.98 27.92 28.44 28.44
28.90 27.94 28.50 28.38
28.90 27.90 28.46 28.44
Tabla 19. Medición de temperatura corporal sin compensación
Con compensación
sensor 1 sensor 2 sensor 3 sensor 4
35.80 34.67 35.22 35.15
35.80 34.80 35.40 35.15
35.97 34.80 35.40 35.22
35.97 34.72 35.52 35.22
36.02 34.87 35.45 35.15
35.97 34.75 35.30 35.15
36.02 34.75 35.37 35.12
36.12 34.90 35.52 35.30
36.02 34.87 35.30 35.15
35.97 34.75 35.37 35.30
Tabla 20. Medición de temperatura corporal con compensación
Con la temperatura corporal si se nota más el cambio de temperatura de los
tres sensores respecto al de referencia (sensor 2), aunque la diferencia es solo

68
de 1 grado centígrado más o menos, cuando debería de ser aproximadamente
de 8 grados centígrados.
Las mediciones que presentaron un resultado más satisfactorio fueron la de la
temperatura corporal, y la de la punta del cautín calentando la lata
La de la jeringa muestra un aparente buen resultado pero la quitaba y media lo
mismo (suelo)
La de la hielera tocaba hacer una compensación pequeña entre 0 y 1
El cautín solo no mostraba algún resultado del cual se pudiera sacar una
conclusión ya que irradia mucho calor y los sensores media prácticamente lo
mismo.
8.4.3 Tercera prueba
La tercera prueba reúne los métodos de medición de las dos primeras pruebas
ya que se miden diferentes objetos en diferentes terrenos con los sensores de
temperatura en la posiciones de la segunda prueba, pero en el terreno de la
primera prueba.
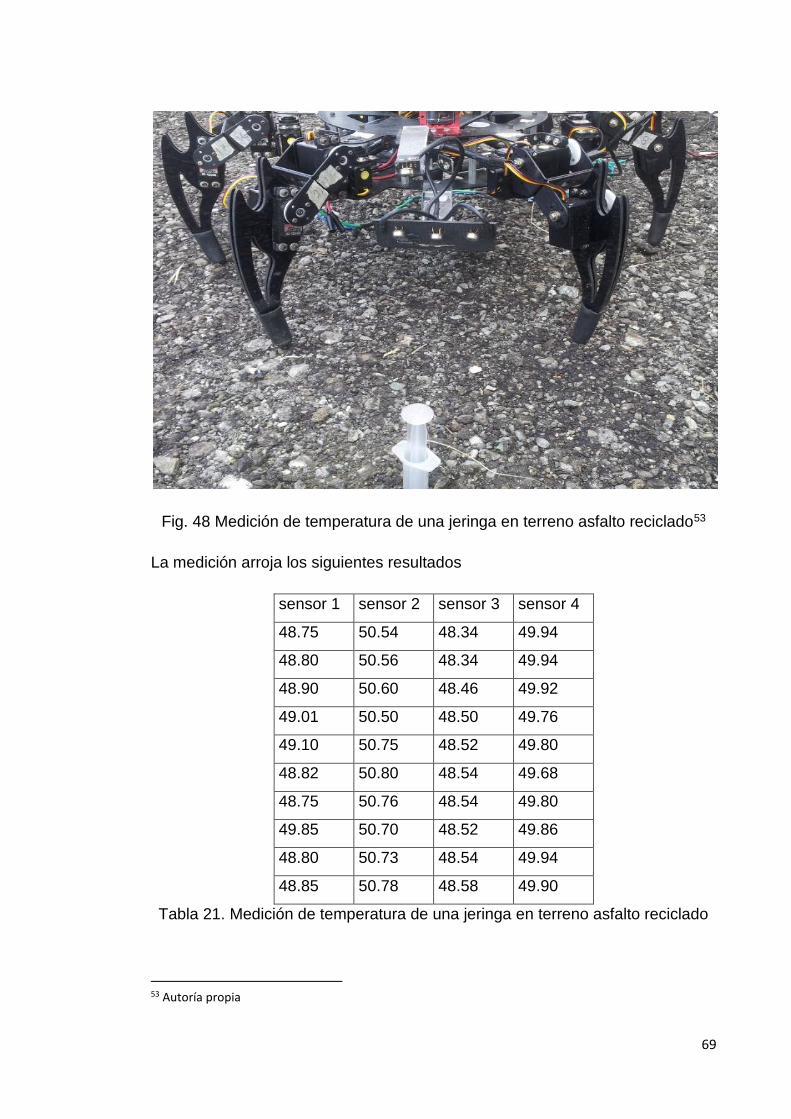
8.4.3.1 Primera prueba, Medición de la jeringa respecto a terreno en
asfalto reciclado.
Consiste en sembrar una jeringa en un terreno compuesto de asfalto reciclado,
el cual está en una finca la cual está en terreno montañoso.
Se pone el robot hexápodo de tal forma que quede al frente de la jeringa para
proceder a tomar las mediciones de temperatura con los sensores como se
observa en la Fig.48
69
Fig. 48 Medición de temperatura de una jeringa en terreno asfalto reciclado53
La medición arroja los siguientes resultados
sensor 1 sensor 2 sensor 3 sensor 4
48.75 50.54 48.34 49.94
48.80 50.56 48.34 49.94
48.90 50.60 48.46 49.92
49.01 50.50 48.50 49.76
49.10 50.75 48.52 49.80
48.82 50.80 48.54 49.68
48.75 50.76 48.54 49.80
49.85 50.70 48.52 49.86
48.80 50.73 48.54 49.94
48.85 50.78 48.58 49.90
Tabla 21. Medición de temperatura de una jeringa en terreno asfalto reciclado
53 Autoría propia
70
Como se observa el asfalto es más caliente que la jeringa, la jeringa no alcanza
a calentarse a la misma temperatura o mayor que la temperatura del asfalto en
este caso.
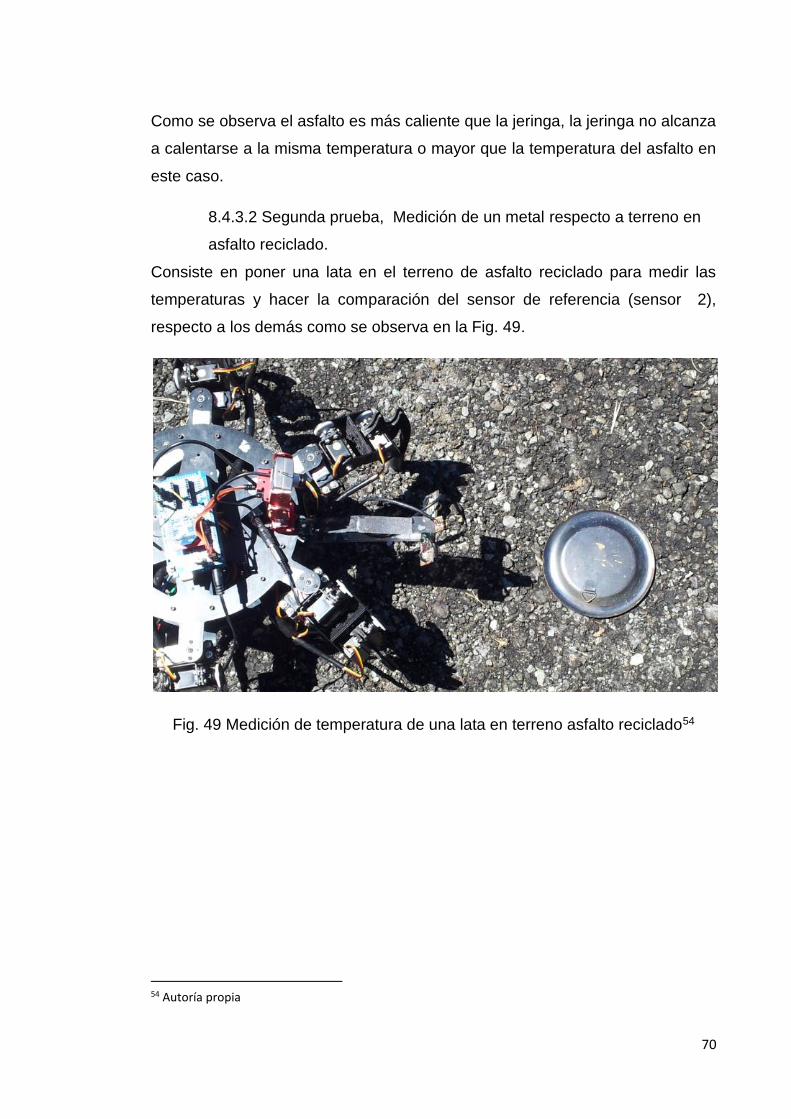
8.4.3.2 Segunda prueba, Medición de un metal respecto a terreno en
asfalto reciclado.
Consiste en poner una lata en el terreno de asfalto reciclado para medir las
temperaturas y hacer la comparación del sensor de referencia (sensor 2),
respecto a los demás como se observa en la Fig. 49.
Fig. 49 Medición de temperatura de una lata en terreno asfalto reciclado54
54 Autoría propia
71
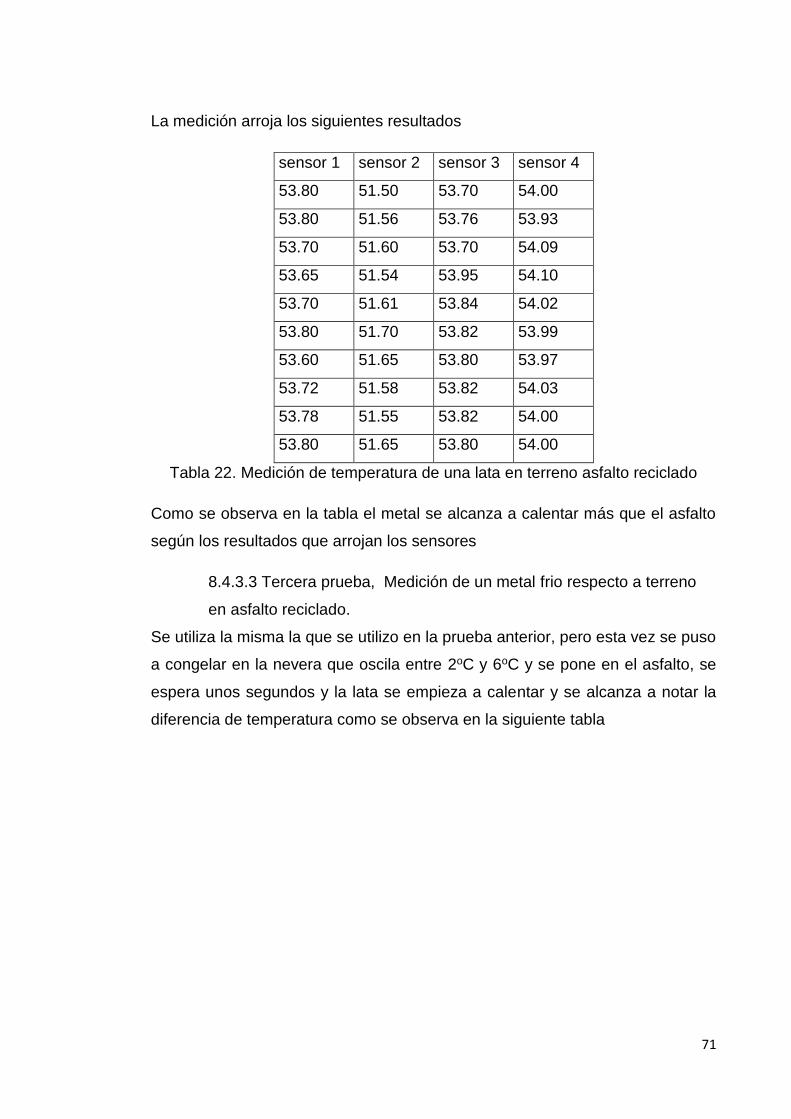
La medición arroja los siguientes resultados
sensor 1 sensor 2 sensor 3 sensor 4
53.80 51.50 53.70 54.00
53.80 51.56 53.76 53.93
53.70 51.60 53.70 54.09
53.65 51.54 53.95 54.10
53.70 51.61 53.84 54.02
53.80 51.70 53.82 53.99
53.60 51.65 53.80 53.97
53.72 51.58 53.82 54.03
53.78 51.55 53.82 54.00
53.80 51.65 53.80 54.00
Tabla 22. Medición de temperatura de una lata en terreno asfalto reciclado
Como se observa en la tabla el metal se alcanza a calentar más que el asfalto
según los resultados que arrojan los sensores
8.4.3.3 Tercera prueba, Medición de un metal frio respecto a terreno
en asfalto reciclado.
Se utiliza la misma la que se utilizo en la prueba anterior, pero esta vez se puso
a congelar en la nevera que oscila entre 2oC y 6oC y se pone en el asfalto, se
espera unos segundos y la lata se empieza a calentar y se alcanza a notar la
diferencia de temperatura como se observa en la siguiente tabla
72
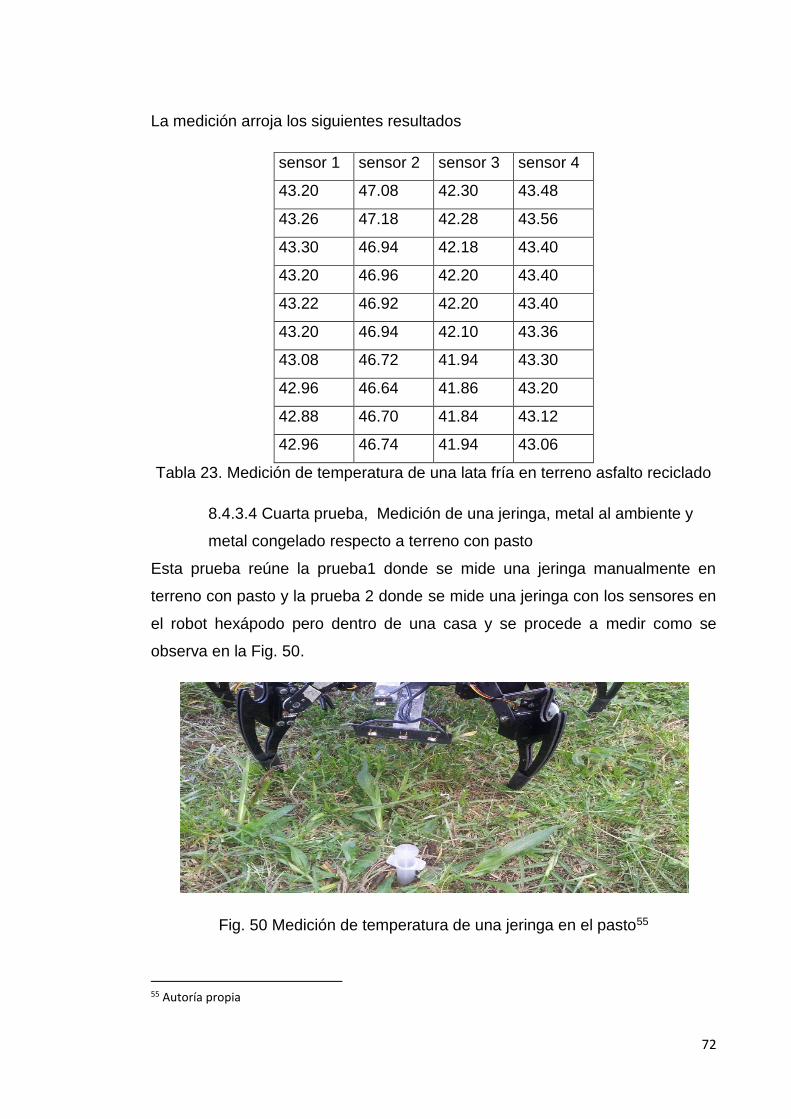
La medición arroja los siguientes resultados
sensor 1 sensor 2 sensor 3 sensor 4
43.20 47.08 42.30 43.48
43.26 47.18 42.28 43.56
43.30 46.94 42.18 43.40
43.20 46.96 42.20 43.40
43.22 46.92 42.20 43.40
43.20 46.94 42.10 43.36
43.08 46.72 41.94 43.30
42.96 46.64 41.86 43.20
42.88 46.70 41.84 43.12
42.96 46.74 41.94 43.06
Tabla 23. Medición de temperatura de una lata fría en terreno asfalto reciclado
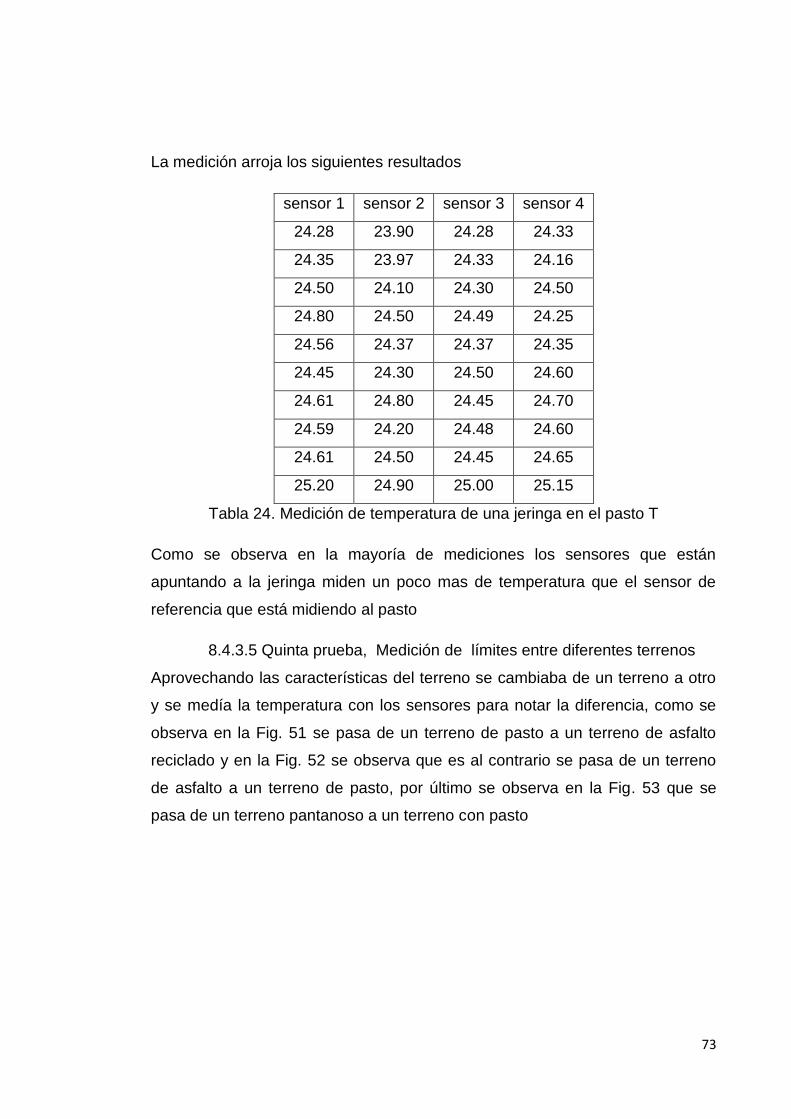
8.4.3.4 Cuarta prueba, Medición de una jeringa, metal al ambiente y
metal congelado respecto a terreno con pasto
Esta prueba reúne la prueba1 donde se mide una jeringa manualmente en
terreno con pasto y la prueba 2 donde se mide una jeringa con los sensores en
el robot hexápodo pero dentro de una casa y se procede a medir como se
observa en la Fig. 50.
Fig. 50 Medición de temperatura de una jeringa en el pasto55
55 Autoría propia
73
La medición arroja los siguientes resultados
sensor 1 sensor 2 sensor 3 sensor 4
24.28 23.90 24.28 24.33
24.35 23.97 24.33 24.16
24.50 24.10 24.30 24.50
24.80 24.50 24.49 24.25
24.56 24.37 24.37 24.35
24.45 24.30 24.50 24.60
24.61 24.80 24.45 24.70
24.59 24.20 24.48 24.60
24.61 24.50 24.45 24.65
25.20 24.90 25.00 25.15
Tabla 24. Medición de temperatura de una jeringa en el pasto T
Como se observa en la mayoría de mediciones los sensores que están
apuntando a la jeringa miden un poco mas de temperatura que el sensor de
referencia que está midiendo al pasto
8.4.3.5 Quinta prueba, Medición de límites entre diferentes terrenos
Aprovechando las características del terreno se cambiaba de un terreno a otro
y se medía la temperatura con los sensores para notar la diferencia, como se
observa en la Fig. 51 se pasa de un terreno de pasto a un terreno de asfalto
reciclado y en la Fig. 52 se observa que es al contrario se pasa de un terreno
de asfalto a un terreno de pasto, por último se observa en la Fig. 53 que se
pasa de un terreno pantanoso a un terreno con pasto
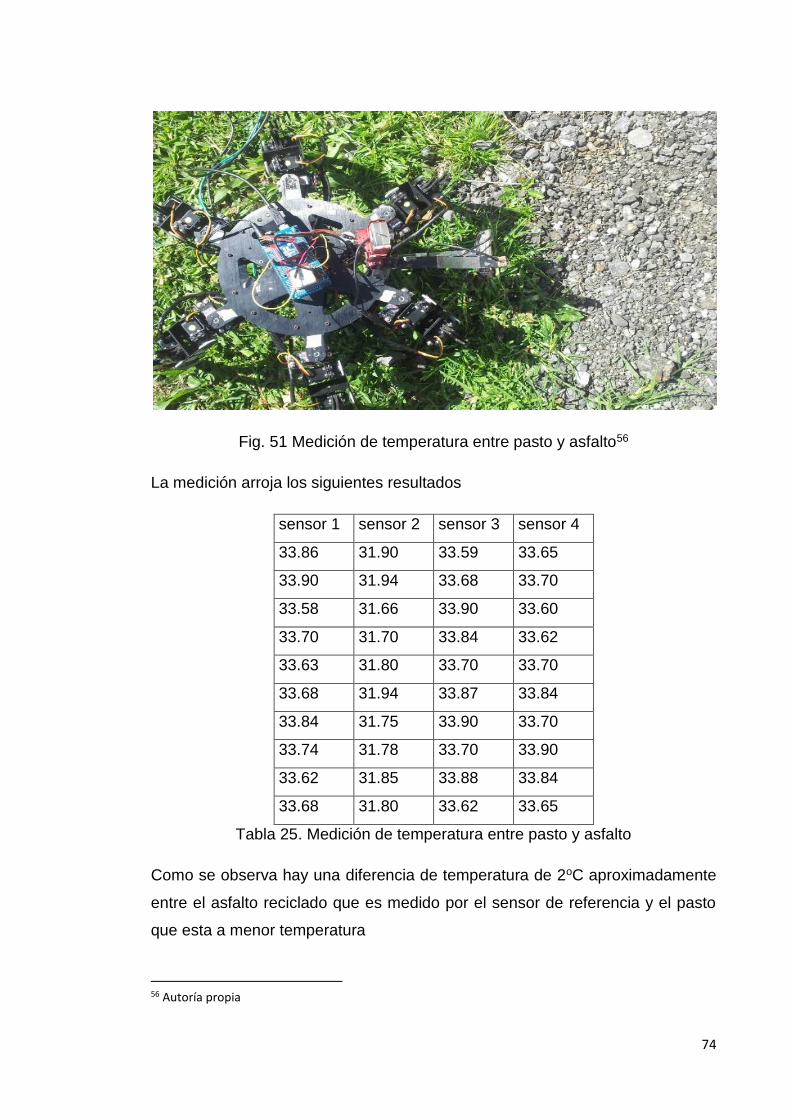
74
Fig. 51 Medición de temperatura entre pasto y asfalto56
La medición arroja los siguientes resultados
sensor 1 sensor 2 sensor 3 sensor 4
33.86 31.90 33.59 33.65
33.90 31.94 33.68 33.70
33.58 31.66 33.90 33.60
33.70 31.70 33.84 33.62
33.63 31.80 33.70 33.70
33.68 31.94 33.87 33.84
33.84 31.75 33.90 33.70
33.74 31.78 33.70 33.90
33.62 31.85 33.88 33.84
33.68 31.80 33.62 33.65
Tabla 25. Medición de temperatura entre pasto y asfalto
Como se observa hay una diferencia de temperatura de 2oC aproximadamente
entre el asfalto reciclado que es medido por el sensor de referencia y el pasto
que esta a menor temperatura
56 Autoría propia

75
Fig. 52 Medición de temperatura entre asfalto y pasto57
Los resultados se observan en la siguiente tabla
sensor 1 sensor 2 sensor 3 sensor 4
31.80 33.86 30.42 31.06
31.70 33.70 30.46 31.04
31.66 33.70 30.52 31.04
31.76 33.62 30.66 31.12
31.90 33.84 30.58 31.34
31.94 33.90 30.84 31.40
32.16 33.70 30.76 31.40
32.16 33.68 30.76 31.42
32.18 33.82 30.76 31.66
31.94 33.78 30.84 31.54
Tabla 26. Medición de temperatura entre asfalto y pasto
Al igual que la medición anterior hay una diferencia de temperatura de
aproximadamente entre el pasto y la hierba siempre se evidencia que el asfalto
siempre esta más caliente que el pasto, debido a esto un objeto que este en el
57 Autoría propia
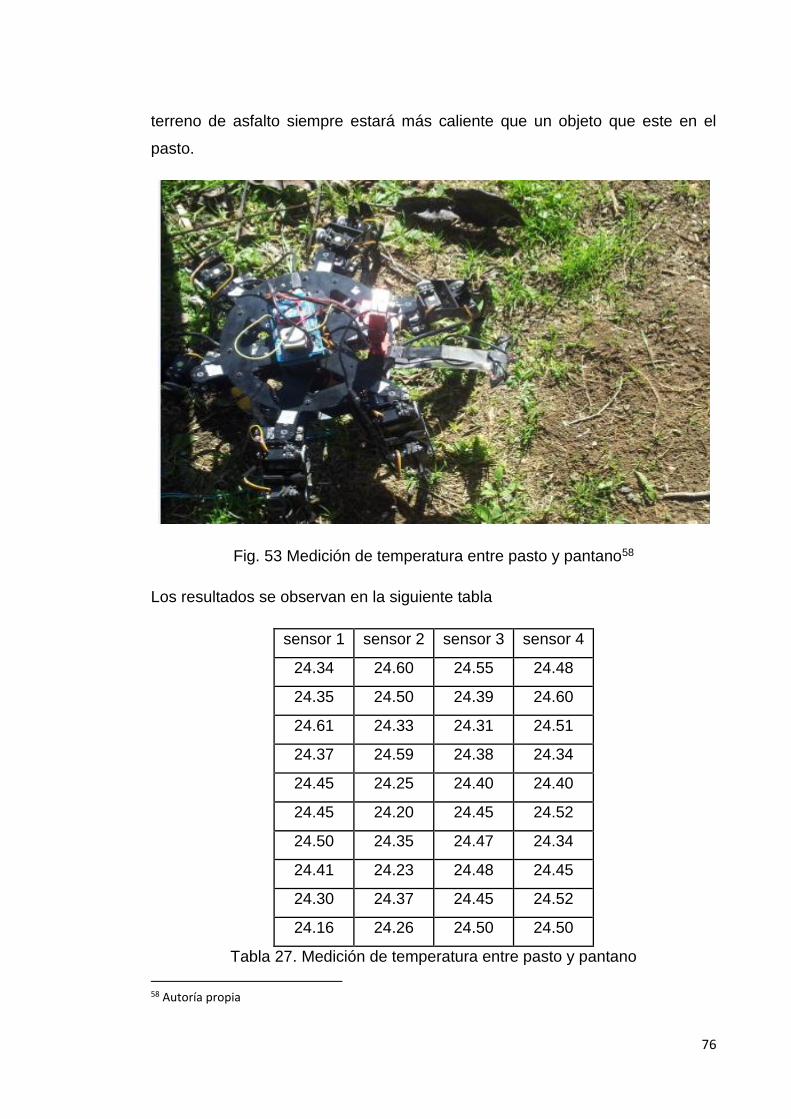
76
terreno de asfalto siempre estará más caliente que un objeto que este en el
pasto.
Fig. 53 Medición de temperatura entre pasto y pantano58
Los resultados se observan en la siguiente tabla
sensor 1 sensor 2 sensor 3 sensor 4
24.34 24.60 24.55 24.48
24.35 24.50 24.39 24.60
24.61 24.33 24.31 24.51
24.37 24.59 24.38 24.34
24.45 24.25 24.40 24.40
24.45 24.20 24.45 24.52
24.50 24.35 24.47 24.34
24.41 24.23 24.48 24.45
24.30 24.37 24.45 24.52
24.16 24.26 24.50 24.50
Tabla 27. Medición de temperatura entre pasto y pantano
58 Autoría propia

77
En el límite de terreno pantanoso y pasto se evidencia que no hay un cambio
de temperatura significativo ya que tanto el sensor de referencia como en los
otros no hay un cambio de temperatura significativo, aunque físicamente se
evidencia que el pantano es húmedo.
78
9. CONCLUSIONES
Con los sensores MLX90614 se obtuvieron buenos resultados pero no muy
satisfactorios debido a que esta referencia solo está diseñada para trabajar al
80% de su capacidad, por lo cual no son muy precisos, si pueden notar
cambios de temperatura de 0.5oC, inclusive de menos pero en cualquier
ambiente este cambio de temperatura se puede producir en cualquier objeto en
cuestión de milisegundos.
Los sensores son más precisos cuando están a 1 o 2 cms del objeto, a medida
que se van alejando del objeto van perdiendo dicha precisión en cuanto a la
temperatura debido a esto se programaron los sensores con un factor
multiplicativo, pero este a su vez también multiplica el error, el campo de visión
por esto ya no median directamente el objeto sino que también alcanzaban a
medir un poco de la temperatura del entorno dificultando así las mediciones.
El ambiente afecta mucho las mediciones, es decir, en el momento de realizar
una prueba si el sol estaba despejado arrojaba unos resultados, si pasaba una
nube y tapaba el sol haciendo la misma prueba los valores de dichos
resultados cambiaban inmediatamente.
Con la metodología, los sensores y las pruebas realizadas no se puede
asegurar con exactitud que se puede detectar una mina antipersona artesanal
tipo jeringa pero si existe la posibilidad ya que en las diferentes pruebas se
pueden evidenciar cambios de temperatura entre diferentes objetos, terrenos y
materiales.
Se realizaron pruebas para el control secuencial del robot hexápodo donde
siempre tiene que estar en equilibrio distribuyendo bien el peso de todos los
componentes electrónicos con los que se iba instrumentando y siempre
garantizando que mínimo 3 de sus patas estuvieran fijas en el piso para que no
se cayera conservando así su centro de masa.
Se probo el control secuencial en diferentes terrenos todos en una finca en
Marinilla- Antioquia, donde el robot hexápodo se desenvolvía mejor en terreno

79
regular, en los terrenos irregulares se le dificulta un poco el caminar por esto se
programaron secuencias adicionales para que se estabilizara al momento que
se le envíe la orden; debido a los terrenos irregulares los servomotores del
robot hexápodo sufrieron demasiado donde se llegaron a dañar 12
servomotores, donde los que más sufren son los que están ubicados en las
extremidades y se ponen en la superficie ya que son los que aguantan todo el
peso.
Para el robot hexápodo solo se pueden utilizar los servos originales de
referencia hs-485hb delux hitec ya que el hexápodo está diseñado solo para
trabajar con estos, se probaron otros servos y no encajaban bien o se dañaban
fácilmente, por lo cual se dificultó un poco las pruebas del control secuencial.
Cada componente electrónico como xbee, arduino, sensores MLX90614, GPS,
por aparte funcionan bien, al momento de unirlos y realizar la instrumentación
se dificulta el proceso ya que hay que acoplar cada componente tanto en la
parte de hardware como en la parte de software y garantizar que cada uno si
envíe su debida señal al momento de ser requerido.
80
10. REFERENCIAS BIBLIOGRAFICAS
[1]Beatriz Liliana Gómez Gómez, Jeniffer Victoria Torres Romero, Ever Alberto
Velásquez Sierra Helena Pérez Garcés, Andrés Mauricio cárdenas torres,
“Chortellus: Vehículo Teledirigido Para La Destrucción De Artefactos
Explosivos Improvisados Plásticos”, 08 DE OCTUBRE DE 2010
[2]Melvin Andrés González Pino, Cristhian Manuel Durán Acevedo. “El tmr-1.
Un robot movil teleoperado”. Revista Colombiana de Tecnologías de
Avanzada. Vol. 2 #14 – 2009 Pag 26-33.
[3]Kenneth M. Dawson-Howe ,Tomos G. Williams. “The detection of buried
landmines usin g probing robots”.Robotics and Autonomous Systems 23
(1998) 235-243.
[4]Maki K. Habib.“Controlled biological and biomimetic systems for landmine
detection”.Biosensors and Bioelectronics 23 (2007) 1–18, Available online 2
June 2007
[5]P. González de Santos, J.A. Cobano, E. García, J. Estremera, M.A. Armada.
“A six-legged robot-based system for humanitarian demining
missions”.Mechatronics 17 (2007) 417–430, accepted 23 April 2007
[6] Luis Antonio García Gutiérrez,”Diseño Y Construcción De Un Sistema
Robótico Para La Exploración De Campos Sembrados Con Minas Antipersona”
pag 49-55 Aceptación: Diciembre 2 de 2008
[7] Alexander Cerón Correa. “Sistemas Robóticos Teleoperados”. Ciencian e
Ingeniería Neogranadina, Numero 015, pag 62-69, 2005
[8] Ángela María Bedoya Hernández, Gustavo Adolfo Guzmán Cadavid, José
Andrés Chaves Osorio. “Propuesta de desarrollo robótico para el desminado
humanitario”. Scientia et Technica Año XVI, No 49, Diciembre de 2011. Pag
239-244.
81
[9] Roberto Carlo Ponticelli Lima, “sistema de exploración de terrenos con
robots móviles: aplicación en tareas de detección y localización deminas
antipersonas.” Madrid, 2011
[10]J.C. Parra, J.A. Sobrinob, P.S. Acevedoy L.J. Morales. “Estimación de la
temperatura de suelo desde datos satelitales AVHRR-NOAA aplicando
algoritmos de splitwindow”, revista mexicana de fisica52 (3) 238–245, aceptado
el 26 de 04 de 2006
[11]www.wikipedia.org
[12] www.unicef.org.co/masartemenosminas/4.htm
[13]http://www.ipc.org.co/agenciadeprensa/index.php?option=com_content&vie
w=article&id=690:minas-antipersonal-una-guerra-que-se-mueve-por-
antioquia&catid=37:general&Itemid=150
[14]http://foro.tiempo.com/la-importancia-de-la-temperatura-del-suelo-y-como-
se-mide-t9910.0.html
[15]http://www.xbee.cl
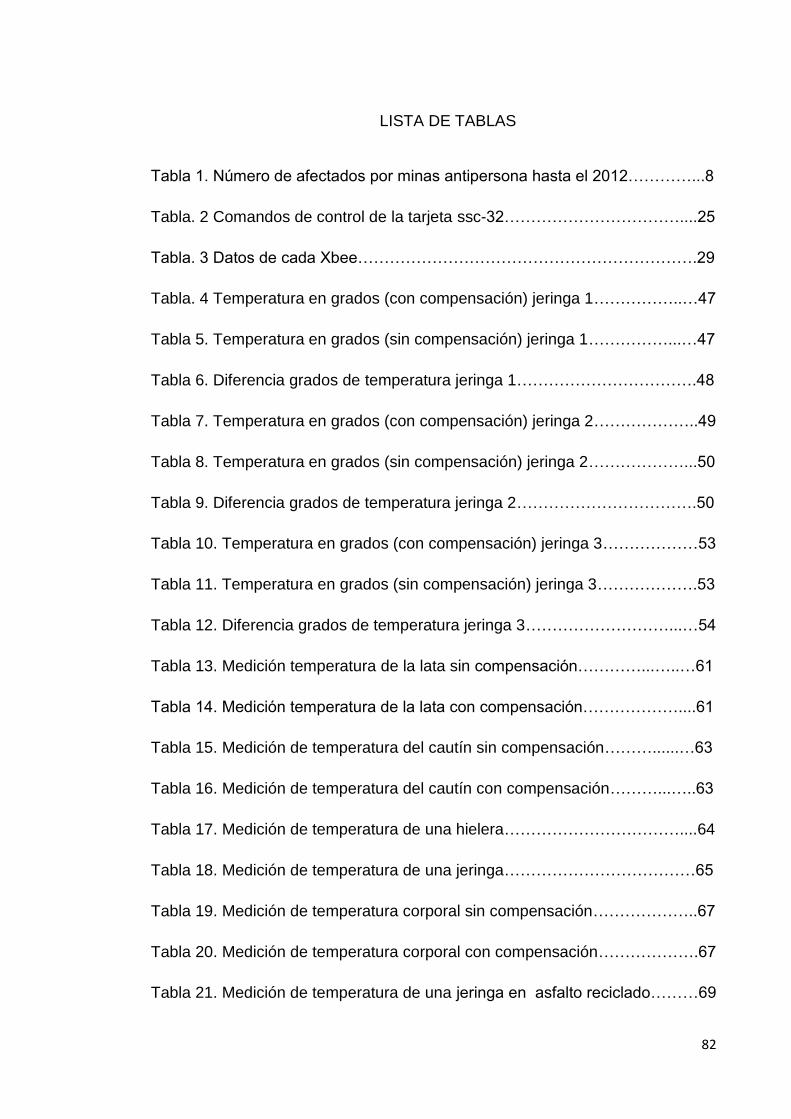
82
LISTA DE TABLAS
Tabla 1. Número de afectados por minas antipersona hasta el 2012…………...8
Tabla. 2 Comandos de control de la tarjeta ssc-32……………………………....25
Tabla. 3 Datos de cada Xbee……………………………………………………….29
Tabla. 4 Temperatura en grados (con compensación) jeringa 1……………..…47
Tabla 5. Temperatura en grados (sin compensación) jeringa 1……………...…47
Tabla 6. Diferencia grados de temperatura jeringa 1…………………………….48
Tabla 7. Temperatura en grados (con compensación) jeringa 2………………..49
Tabla 8. Temperatura en grados (sin compensación) jeringa 2………………...50
Tabla 9. Diferencia grados de temperatura jeringa 2…………………………….50
Tabla 10. Temperatura en grados (con compensación) jeringa 3………………53
Tabla 11. Temperatura en grados (sin compensación) jeringa 3……………….53
Tabla 12. Diferencia grados de temperatura jeringa 3………………………...…54
Tabla 13. Medición temperatura de la lata sin compensación…………...…..…61
Tabla 14. Medición temperatura de la lata con compensación………………....61
Tabla 15. Medición de temperatura del cautín sin compensación………......…63
Tabla 16. Medición de temperatura del cautín con compensación………...…..63
Tabla 17. Medición de temperatura de una hielera……………………………....64
Tabla 18. Medición de temperatura de una jeringa………………………………65
Tabla 19. Medición de temperatura corporal sin compensación………………..67
Tabla 20. Medición de temperatura corporal con compensación……………….67
Tabla 21. Medición de temperatura de una jeringa en asfalto reciclado………69
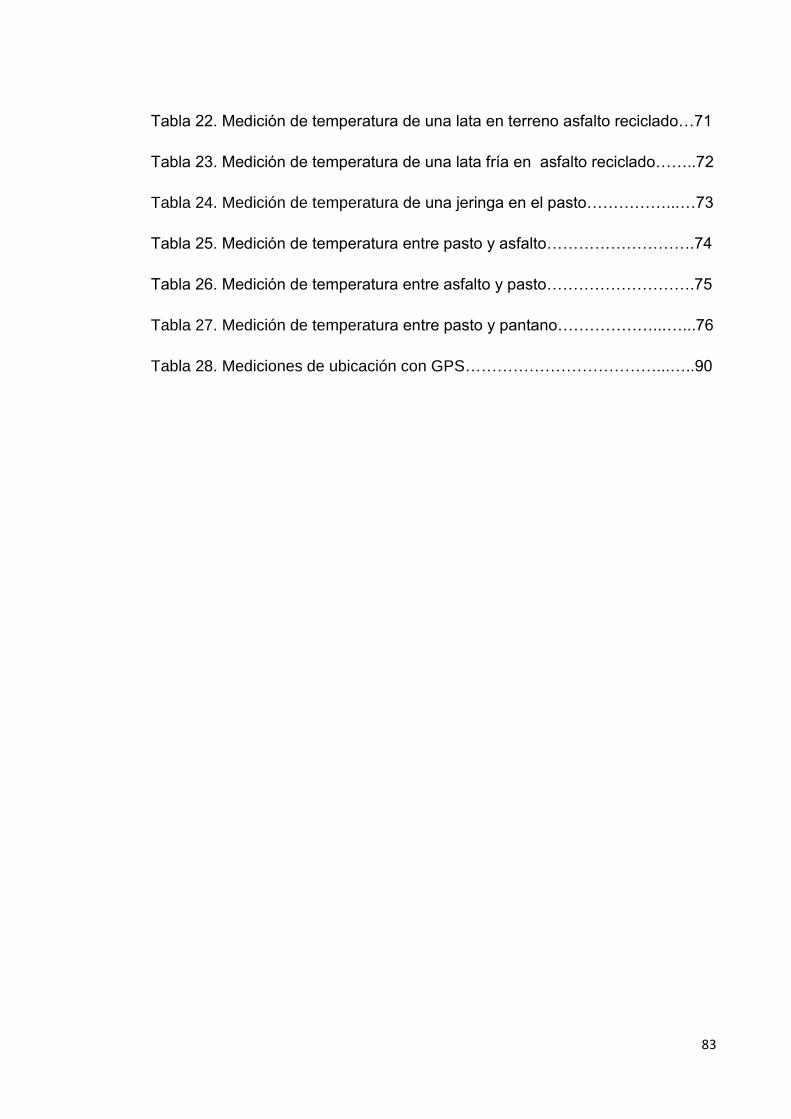
83
Tabla 22. Medición de temperatura de una lata en terreno asfalto reciclado…71
Tabla 23. Medición de temperatura de una lata fría en asfalto reciclado……..72
Tabla 24. Medición de temperatura de una jeringa en el pasto……………...…73
Tabla 25. Medición de temperatura entre pasto y asfalto……………………….74
Tabla 26. Medición de temperatura entre asfalto y pasto……………………….75
Tabla 27. Medición de temperatura entre pasto y pantano………………...…...76
Tabla 28. Mediciones de ubicación con GPS………………………………...…..90
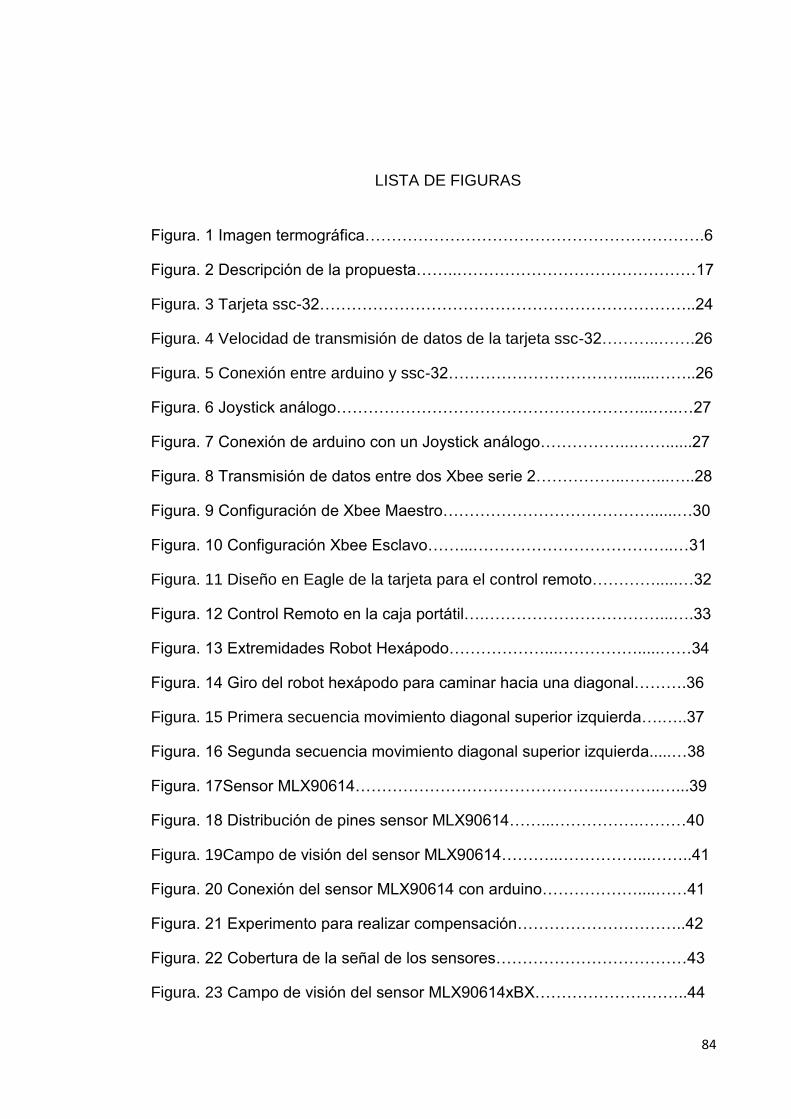
84
LISTA DE FIGURAS
Figura. 1 Imagen termográfica……………………………………………………….6
Figura. 2 Descripción de la propuesta……..………………………………………17
Figura. 3 Tarjeta ssc-32……………………………………………………………..24
Figura. 4 Velocidad de transmisión de datos de la tarjeta ssc-32………..…….26
Figura. 5 Conexión entre arduino y ssc-32…………………………….......……..26
Figura. 6 Joystick análogo…………………………………………………...…..…27
Figura. 7 Conexión de arduino con un Joystick análogo……………...……......27
Figura. 8 Transmisión de datos entre dos Xbee serie 2……………..……...…..28
Figura. 9 Configuración de Xbee Maestro…………………………………......…30
Figura. 10 Configuración Xbee Esclavo……...………………………………..…31
Figura. 11 Diseño en Eagle de la tarjeta para el control remoto………….....…32
Figura. 12 Control Remoto en la caja portátil….……………………………...….33
Figura. 13 Extremidades Robot Hexápodo………………...…………….....……34
Figura. 14 Giro del robot hexápodo para caminar hacia una diagonal……….36
Figura. 15 Primera secuencia movimiento diagonal superior izquierda….…..37
Figura. 16 Segunda secuencia movimiento diagonal superior izquierda.....…38
Figura. 17Sensor MLX90614………………………………………..………..…...39
Figura. 18 Distribución de pines sensor MLX90614……...…………….………40
Figura. 19Campo de visión del sensor MLX90614………..……………...……..41
Figura. 20 Conexión del sensor MLX90614 con arduino………………....……41
Figura. 21 Experimento para realizar compensación…………………………..42
Figura. 22 Cobertura de la señal de los sensores………………………………43
Figura. 23 Campo de visión del sensor MLX90614xBX………………………..44
85
Figura. 24 Medición de los 4 sensores…………………………………………...45
Figura. 25 Jeringa 1 al momento de sembrarse……………………….…………46
Figura. 26 Jeringa 1 al momento de medir……………………………………..…46
Figura. 27 Jeringa 2 al momento de sembrarse………….………………………48
Figura. 28 Jeringa 2 al momento de medir………………………………………..49
Figura. 29 Jeringa 3 al momento de sembrarse……………………………….…51
Figura. 30 Jeringa al momento de medir…………………………………………..51
Figura. 31 Acercamiento a la jeringa 3………………………………………….…52
Figura. 32 Mediciones jeringa 3…………………………………………………….52
Fig. 33 sensores descubiertos…………………………………………………...…55
Figura. 34 Sensor cubierto………………………………………………………….55
Figura. 35 Ubicación de los sensores……………………………………………...56
Figura. 36 Orden y ubicación de los sensores……………………………………56
Figura. 37 Robot hexápodo instrumentado con los sensores…………………..57
Figura. 38 Otra vista del Robot hexápodo instrumentado con los sensores…..57
Figura. 39 Robot hexápodo visto desde arriba……………………………………58
Figura. 40 Sincronización de los sensores en una hoja………………………....58
Figura. 41 Sincronización de los sensores en el piso……………………………59
Figura. 42 Medición con termocupla y multimetro……………………………..…59
Figura. 43 Medición temperatura de la lata con los sensores………………..…60
Figura. 44 Medición temperatura de la lata con los sensores…………………..62
Figura. 45 Medición de temperatura de una hielera…………………………...…64
Figura. 46 Medición de temperatura de una jeringa……………………………...65
Figura. 47 Medición de temperatura de una mano (temperatura corporal)……66
Figura. 48 Medición de temperatura de la jeringa en terreno asfalto reciclado.69
Figura. 49 Medición de temperatura de una lata en terreno asfalto reciclado...70
86
Figura. 50 Medición de temperatura de una jeringa en el pasto………………..72
Figura. 51 Medición de temperatura entre pasto y asfalto………………………74
Figura. 52 Medición de temperatura entre asfalto y pasto……………………....75
Figura. 53 Medición de temperatura entre pasto y pantano………………….…76
Figura. 54 Prueba de caminata en terreno irregular……………………………..87
Figura. 55 Prueba de caminata en terreno regular destapado y con hierba…..88
Figura. 56 Prueba de caminata en una pendiente……………………………….89
Figura. 57 Modulo GPS l20 Bee……………………………………………………90
LISTA DE ANEXOS
Como trabajo de semillero, se trabajo y colaboró en conjunto con el proyecto
“ROBOT HEXÁPODO PARA DETECCIÓN, UBICACIÓN Y SEÑALIZACIÓN DE
MINAS ANTIPERSONA ARTESANALES TIPO JERINGA”, realizando varias
pruebas en la programación y en el caminar del robot hexápodo en diferentes
terrenos, en una finca ubicada en Marinilla en la vereda la Esmeralda donde se
disponen de varios terrenos como plano con vegetación, sin vegetación,
pantanoso, rocoso, con inclinaciones y declinaciones, además de mediciones
de posición con un GPS.
Anexo A
Terreno irregular

87
En este terreo pantanoso como se observa en la Fig. 54 se le dificulto a el robot
hexápodo su caminata ya que se que se lisaba en algunas partes y perdía la
estabilidad, lograba salir de este terreno pero con mucho esfuerzo y mucho
tiempo, debido a esto se programo un algoritmo de estabilidad donde con un
comando activado por un botón el hexápodo se estabiliza.
Fig. 54 Prueba de caminata en terreno irregular59
En el terreno destapado y con hierba pero plano como se observa en la Fig. 55
es donde mejores resultados obtuvo el robot hexápodo ya que se podía mover
fácilmente y los obstáculos y las complicaciones eran menores
Fig. 55 Prueba de caminata en terreno regular destapado y con hierba60
59 Autoría propia 60 Autoría propia
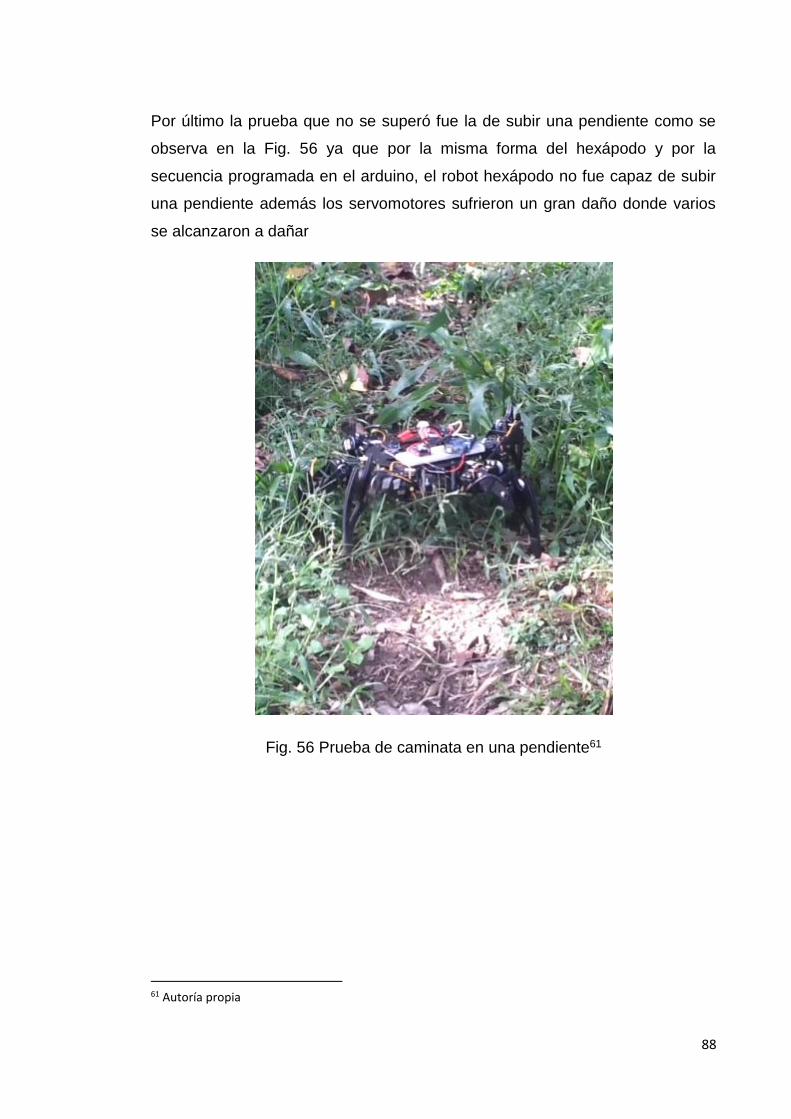
88
Por último la prueba que no se superó fue la de subir una pendiente como se
observa en la Fig. 56 ya que por la misma forma del hexápodo y por la
secuencia programada en el arduino, el robot hexápodo no fue capaz de subir
una pendiente además los servomotores sufrieron un gran daño donde varios
se alcanzaron a dañar
Fig. 56 Prueba de caminata en una pendiente61
61 Autoría propia
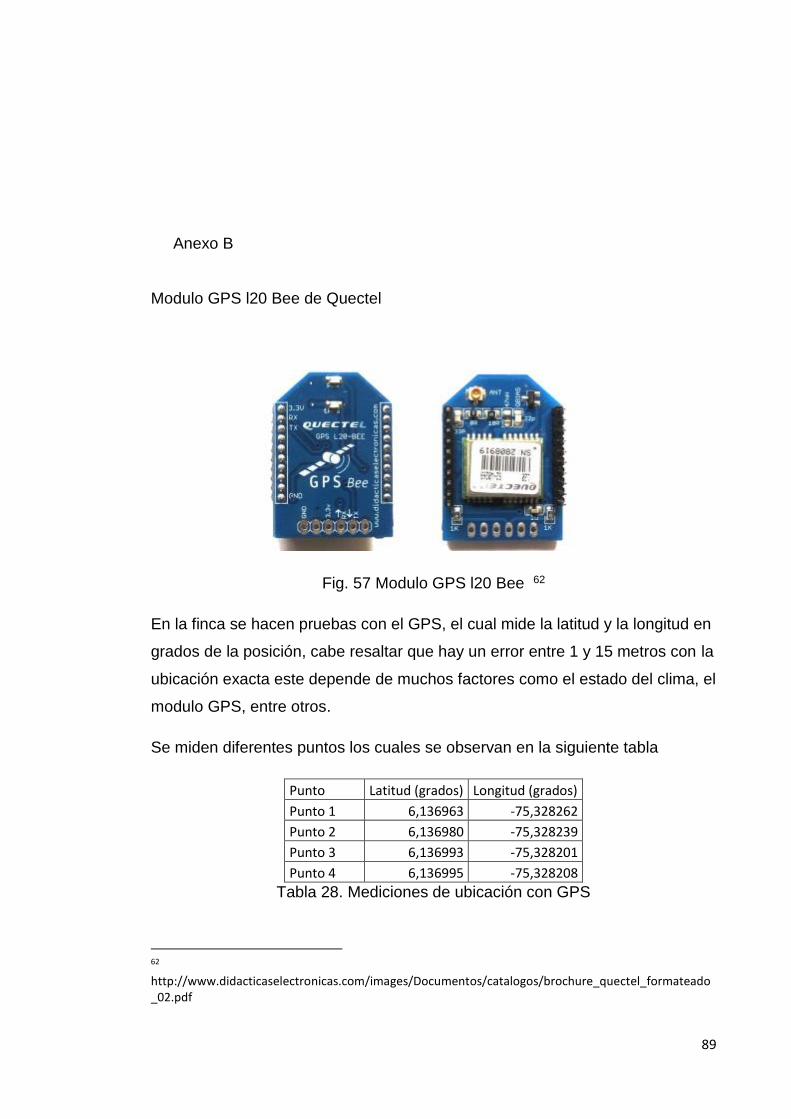
89
Anexo B
Modulo GPS l20 Bee de Quectel
Fig. 57 Modulo GPS l20 Bee 62
En la finca se hacen pruebas con el GPS, el cual mide la latitud y la longitud en
grados de la posición, cabe resaltar que hay un error entre 1 y 15 metros con la
ubicación exacta este depende de muchos factores como el estado del clima, el
modulo GPS, entre otros.
Se miden diferentes puntos los cuales se observan en la siguiente tabla
Punto Latitud (grados) Longitud (grados)
Punto 1 6,136963 -75,328262
Punto 2 6,136980 -75,328239
Punto 3 6,136993 -75,328201
Punto 4 6,136995 -75,328208
Tabla 28. Mediciones de ubicación con GPS
62 http://www.didacticaselectronicas.com/images/Documentos/catalogos/brochure_quectel_formateado_02.pdf
90
Por último se realiza una prueba para verificar cual es la distancia de
comunicación entre los xbee y el resultado es que el control remoto tiene un
alcance de 40 metros aproximadamente
GLOSARIO
API: Programación de aplicativos por interfaz (Application Programming
Interface)
V: Voltios
A: Amperios
F: Faradios
µ: micro
m: mili
mts: metros
s: segundos
Tx: Transmisión
Rx: Recepción
2-d: Dos dimensiones
DC: Corriente directa
ADC: Conversor análogo-digital
PWM: Modulación por ancho de pulsos
GPS: Sistema global de posicionamiento (Global Positioning System)
oC: Grados Centígrados
91