Seleccion de Actuadores
29
2.3.- Selección de actuadores Un actuador es un dispositivo capaz de transformar energía hidráulica, neumática o eléctrica en la activación de un proceso con la finalidad de generar un proceso. Los actuadores eléctricos reversibles son la más moderna representación de las futuras generaciones e innovaciones para las válvulas. La correcta selección de un actuador para una línea de proceso es fundamental, ya que si no se selecciona bien esto repercutirá en el proceso de producción.
-
Upload
aldo-rivers -
Category
Documents
-
view
48 -
download
1
description
como seleccionar actuaodres neumatico e hidraulicos
Transcript of Seleccion de Actuadores
2.3.- Selección de actuadores
Un actuador es un dispositivo capaz de transformar energía hidráulica, neumática o eléctrica en la activación de un proceso con la finalidad de generar un proceso.
Los actuadores eléctricos reversibles son la más moderna representación de las futuras generaciones e innovaciones para las válvulas.
La correcta selección de un actuador para una línea de proceso es fundamental, ya que si no se selecciona bien esto repercutirá en el proceso de producción.
Para elegir un actuador, vale la pena empezar desde el requerimiento impuesto sobre la potencia mecánica, –Pu, por la fuerza y velocidad que describe el movimiento de articulaciones. Con base en la fuente de la potencia de entrada, –Pa, los actuadores pueden clasificarse en tres grupos.
Actuadores neumáticos: Estos actuadores utilizan energía hidráulica proporcionada por un compresor y la transforman en energía mecánica por medio de pistones o turbinas.
Actuadores hidráulicos: Estos actuadores emplean la energía neumática almacenada por un compresor que la transforma en energía mecánica mediante pistones o turbinas.
Actuadores eléctricos: La fuente principal de energía de entrada es la energía eléctrica que fluye desde el sistema de distribución eléctrico.
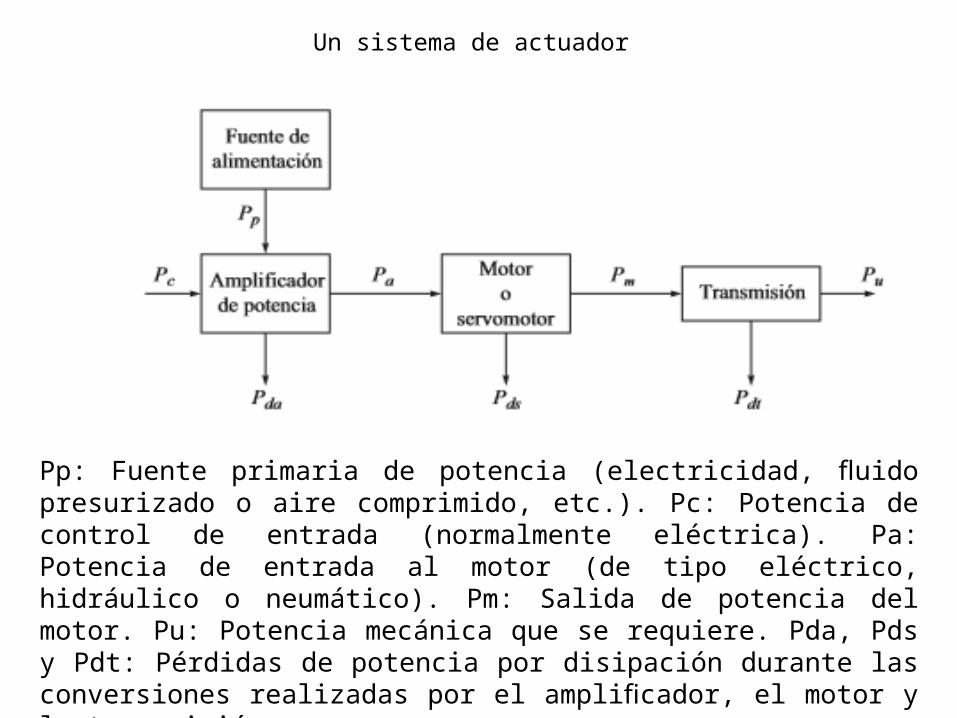
Un sistema de actuador
Pp: Fuente primaria de potencia (electricidad, fluido presurizado o aire comprimido, etc.). Pc: Potencia de control de entrada (normalmente eléctrica). Pa: Potencia de entrada al motor (de tipo eléctrico, hidráulico o neumático). Pm: Salida de potencia del motor. Pu: Potencia mecánica que se requiere. Pda, Pds y Pdt: Pérdidas de potencia por disipación durante las conversiones realizadas por el amplificador, el motor y la transmisión.
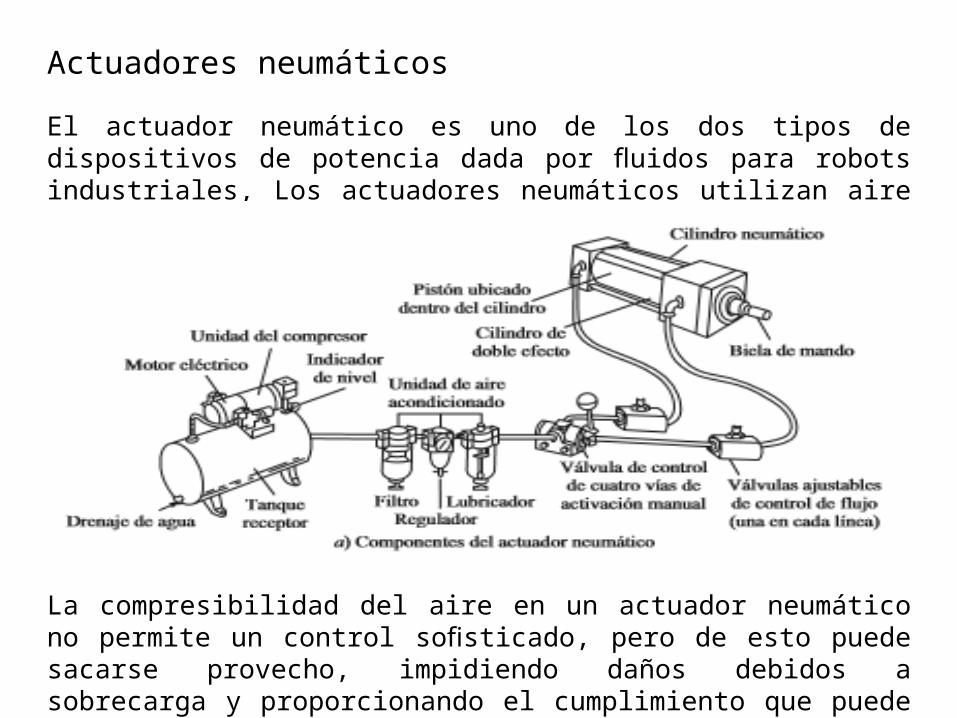
Actuadores neumáticos
El actuador neumático es uno de los dos tipos de dispositivos de potencia dada por fluidos para robots industriales, Los actuadores neumáticos utilizan aire comprimido para su accionamiento.
La compresibilidad del aire en un actuador neumático no permite un control sofisticado, pero de esto puede sacarse provecho, impidiendo daños debidos a sobrecarga y proporcionando el cumplimiento que puede ser requerido en muchas aplicaciones prácticas.
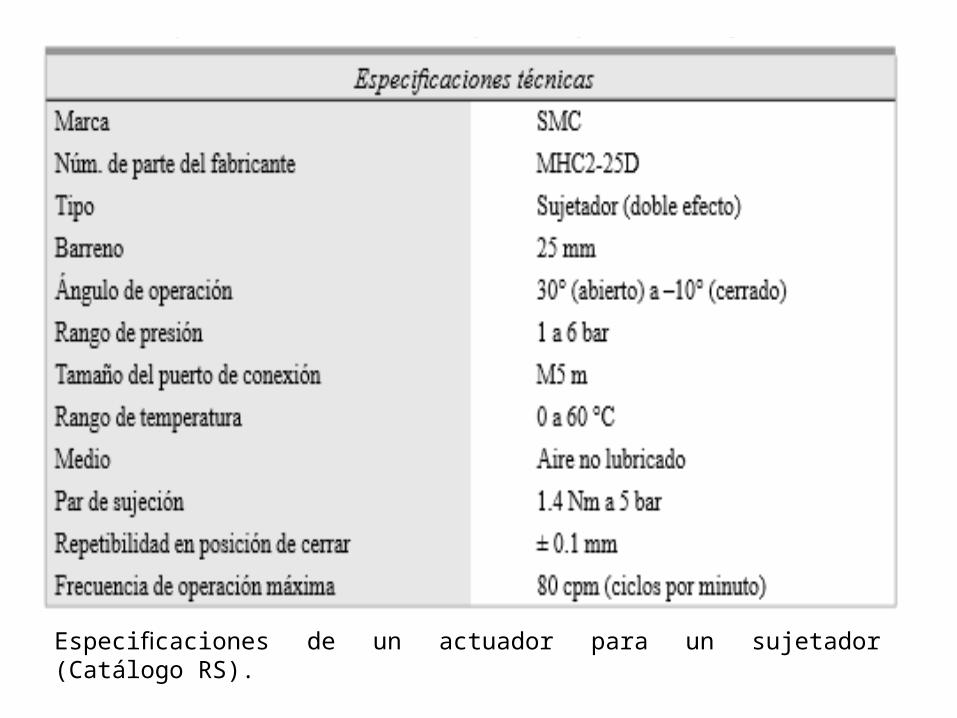
Especificaciones de un actuador para un sujetador (Catálogo RS).
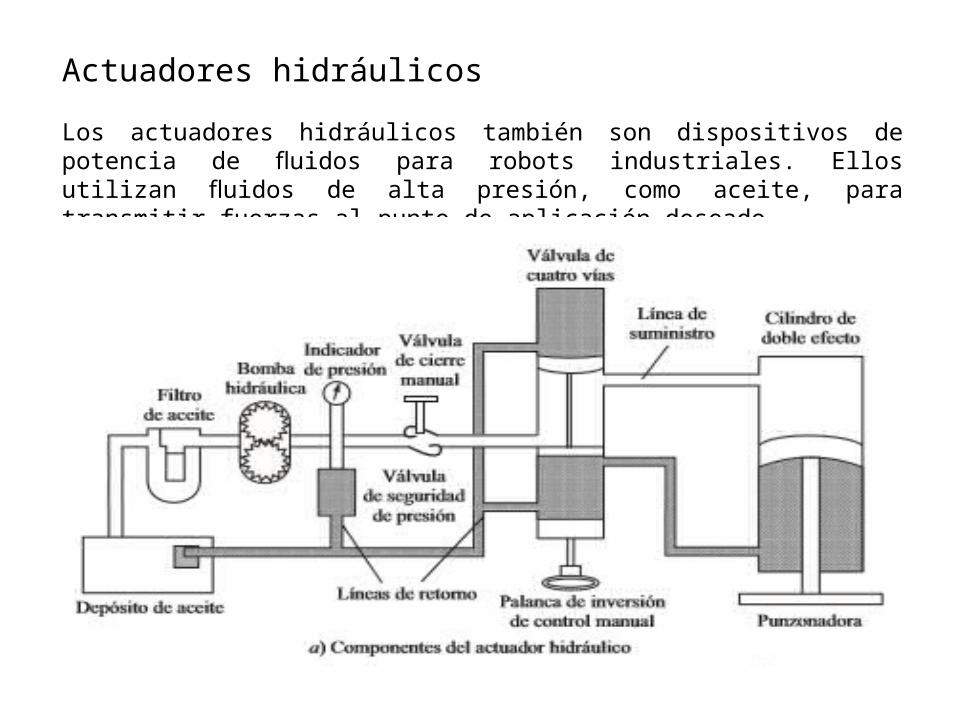
Actuadores hidráulicos
Los actuadores hidráulicos también son dispositivos de potencia de fluidos para robots industriales. Ellos utilizan fluidos de alta presión, como aceite, para transmitir fuerzas al punto de aplicación deseado.
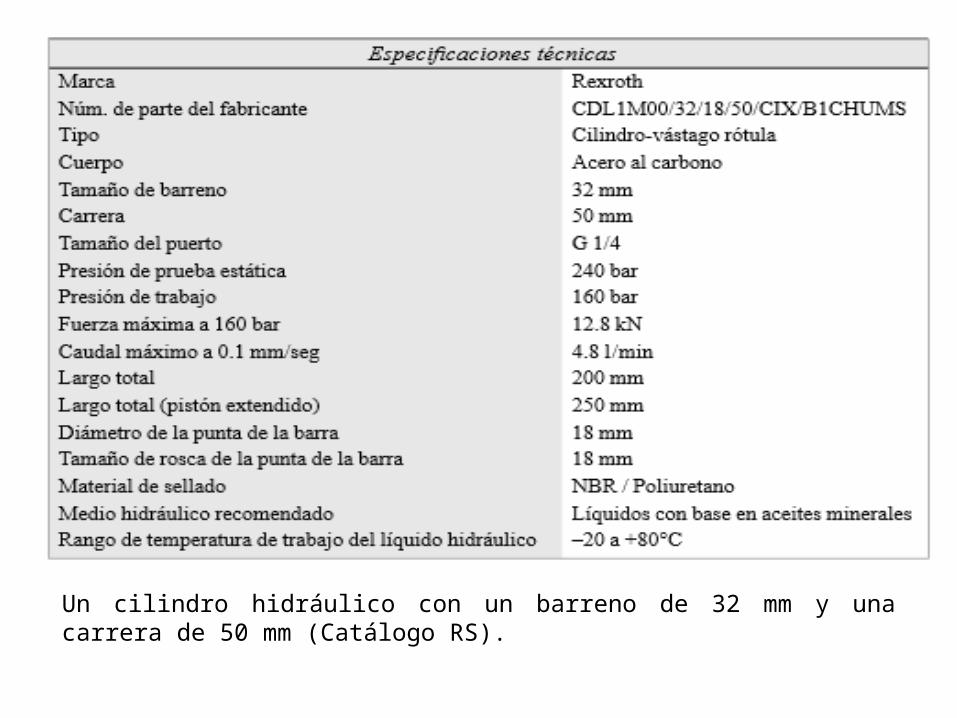
Un cilindro hidráulico con un barreno de 32 mm y una carrera de 50 mm (Catálogo RS).
Los pasos que se deben seguir ante el proceso de selección son: 1. Identificar qué se quiere automatizar, por ejemplo:
Válvula de bolaVálvula de mariposaVálvula de compuertaVálvula de macho
2. Posteriormente se debe determinar si se quiere automatizar:
NeumáticamenteEléctricamenteHidráulicamente
3. Determinar el toque de la válvula y del actuador para que la válvula abra en los tiempos requeridos y no se seleccione un actuador muy grande o muy chico.
4. Tomar en cuenta los siguientes parámetros para asegurarse de la correcta selección de un actuador eléctrico:
VoltajeManiobra en operación (torque)Tiempo de maniobraÁngulo de maniobraTemperaturaConectoresPeso
5. La alineación eléctrica cuentan con un mando manual y con una pantalla de led que informa el status que está teniendo el actuador ya que cuentan con accesorios adicionales como tarjeta servo. Esta alineación eléctrica puede ser:
AlternaContinuaIndistinta
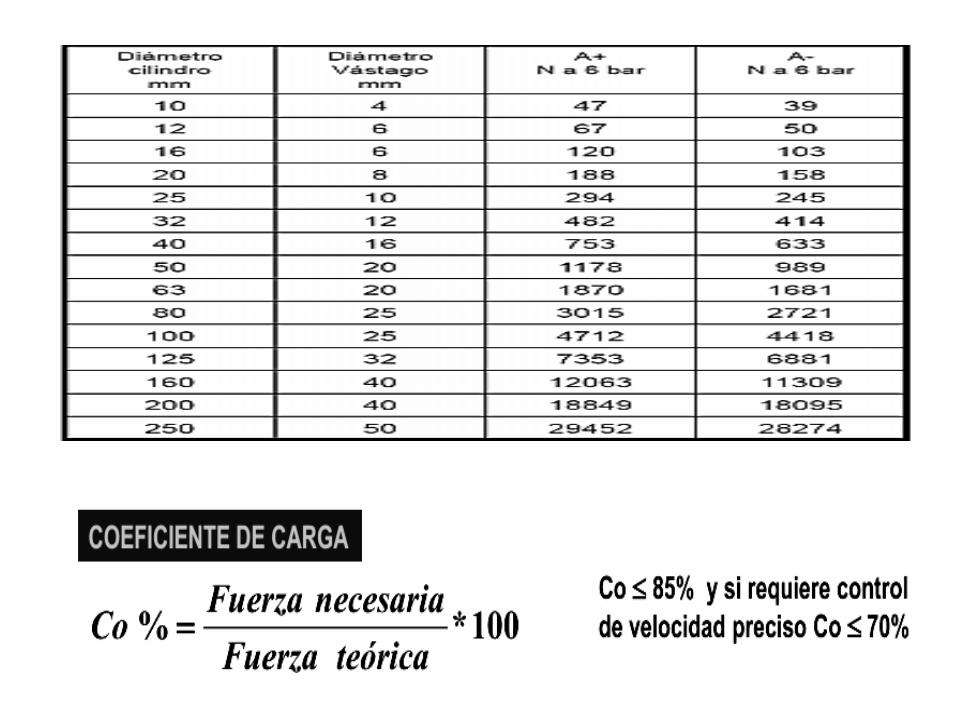
Cuando se trata de seleccionar un actuador, se realizan las siguientes operaciones básicas de cálculo:
Cálculo de la fuerzaLongitud De CarreraVelocidad Del ÉmboloVerificación del pandeo.Capacidad de amortiguaciónConsumos de aire Fijaciones
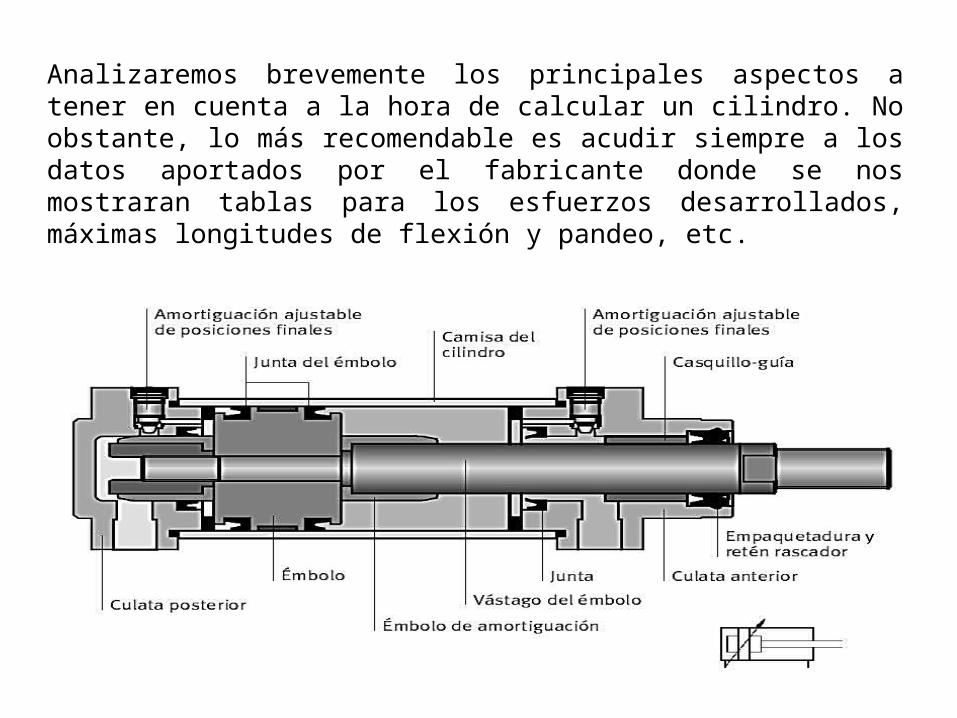
Analizaremos brevemente los principales aspectos a tener en cuenta a la hora de calcular un cilindro. No obstante, lo más recomendable es acudir siempre a los datos aportados por el fabricante donde se nos mostraran tablas para los esfuerzos desarrollados, máximas longitudes de flexión y pandeo, etc.
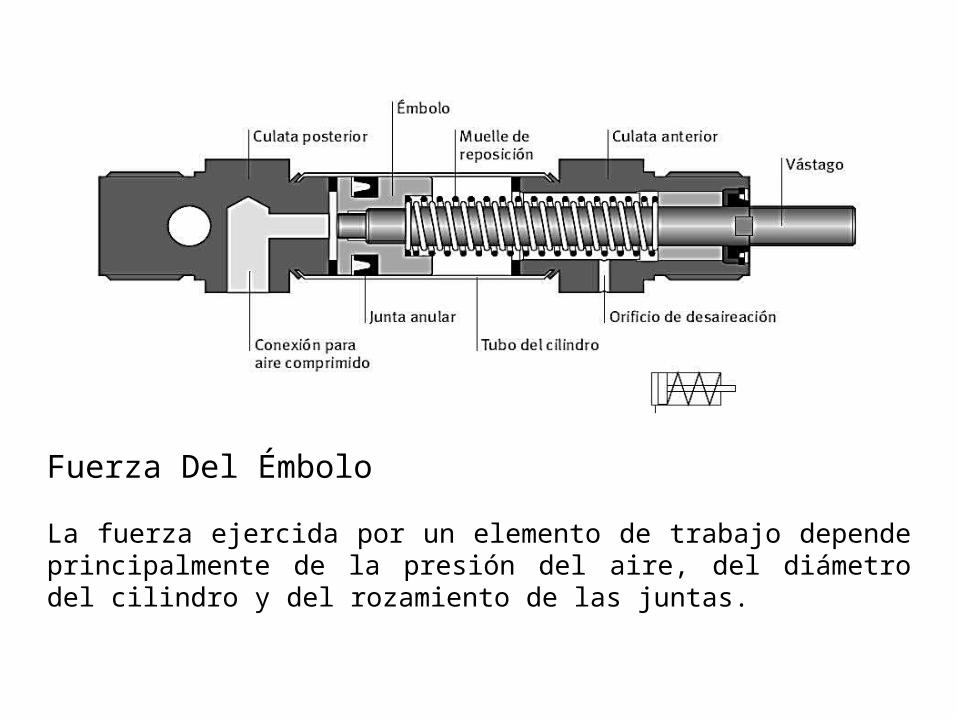
Fuerza Del Émbolo
La fuerza ejercida por un elemento de trabajo depende principalmente de la presión del aire, del diámetro del cilindro y del rozamiento de las juntas.

La fuerza teórica del émbolo se calcula con la siguiente fórmula: F teórica = P · A Dónde:Ft = Fuerza teórica del vástago en Kgf.P= Presión relativa en Kg. / cm2
A= Superficie del émbolo en cm2
En la práctica, es necesario conocer la fuerza real que ejercen los actuadores. Para determinarla, también hay que tener en cuenta los rozamientos. En condiciones normales de servicio (presiones de 400 a 800 kPa. / 4 a 8 bar) se puede suponer que las fuerzas de rozamiento representan de un 3 a un 20% de la fuerza calculada.
Si el cilindro es de simple efecto, a la fuerza teórica calculada, hay que reducirle además la del resorte.
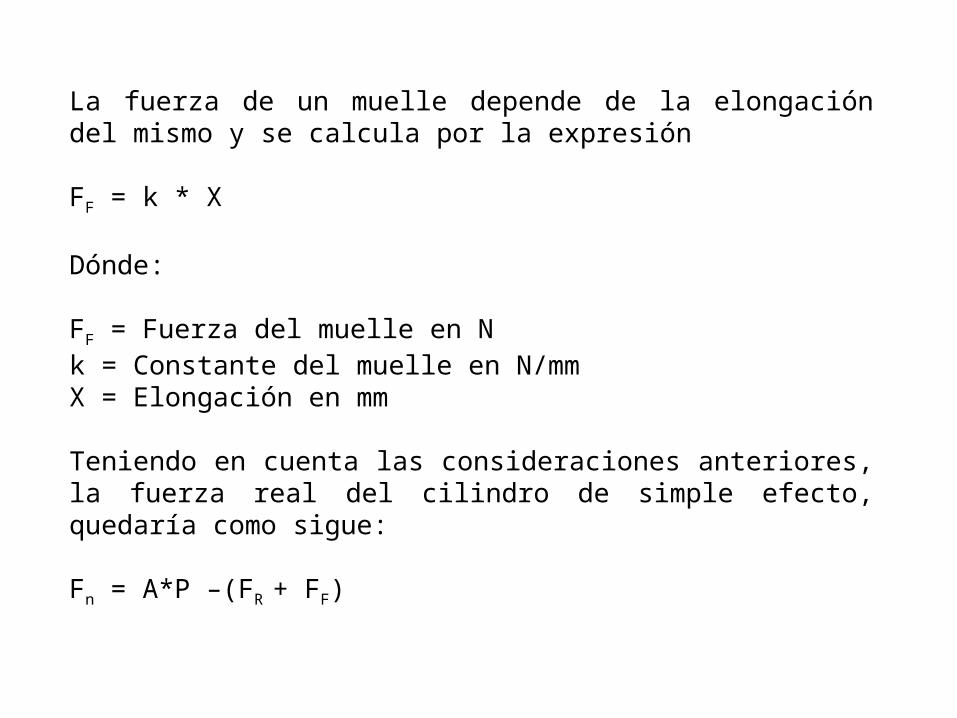
La fuerza de un muelle depende de la elongación del mismo y se calcula por la expresión FF = k * X Dónde:
FF = Fuerza del muelle en N k = Constante del muelle en N/mmX = Elongación en mm Teniendo en cuenta las consideraciones anteriores, la fuerza real del cilindro de simple efecto, quedaría como sigue: Fn = A*P –(FR + FF)
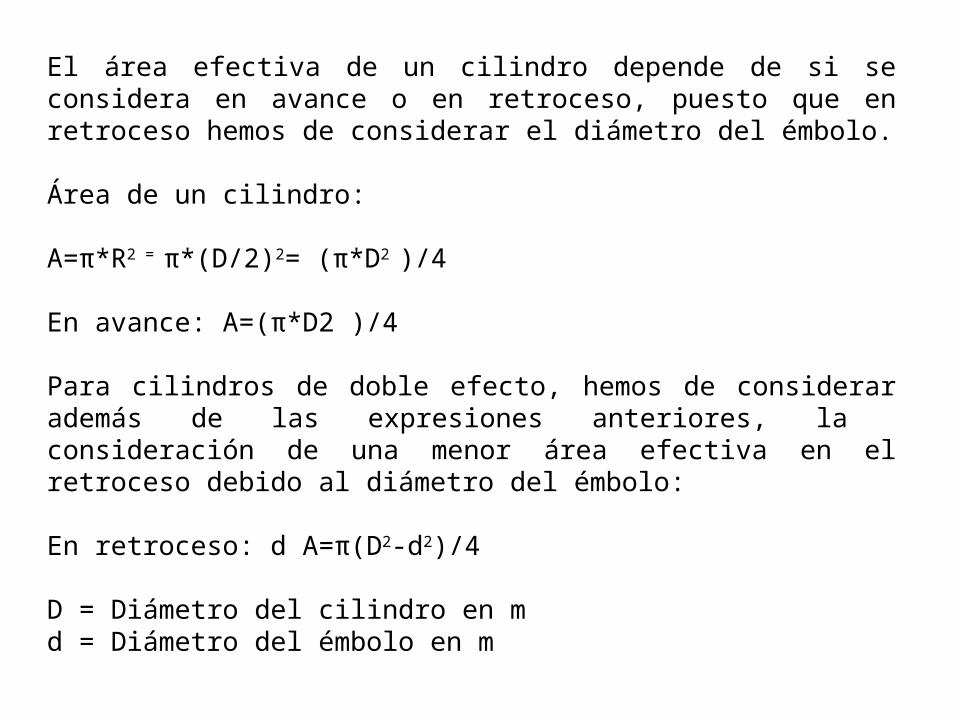
El área efectiva de un cilindro depende de si se considera en avance o en retroceso, puesto que en retroceso hemos de considerar el diámetro del émbolo.
Área de un cilindro:
A=π*R2 = π*(D/2)2= (π*D2 )/4 En avance: A=(π*D2 )/4 Para cilindros de doble efecto, hemos de considerar además de las expresiones anteriores, la consideración de una menor área efectiva en el retroceso debido al diámetro del émbolo:
En retroceso: d A=π(D2-d2)/4
D = Diámetro del cilindro en md = Diámetro del émbolo en m
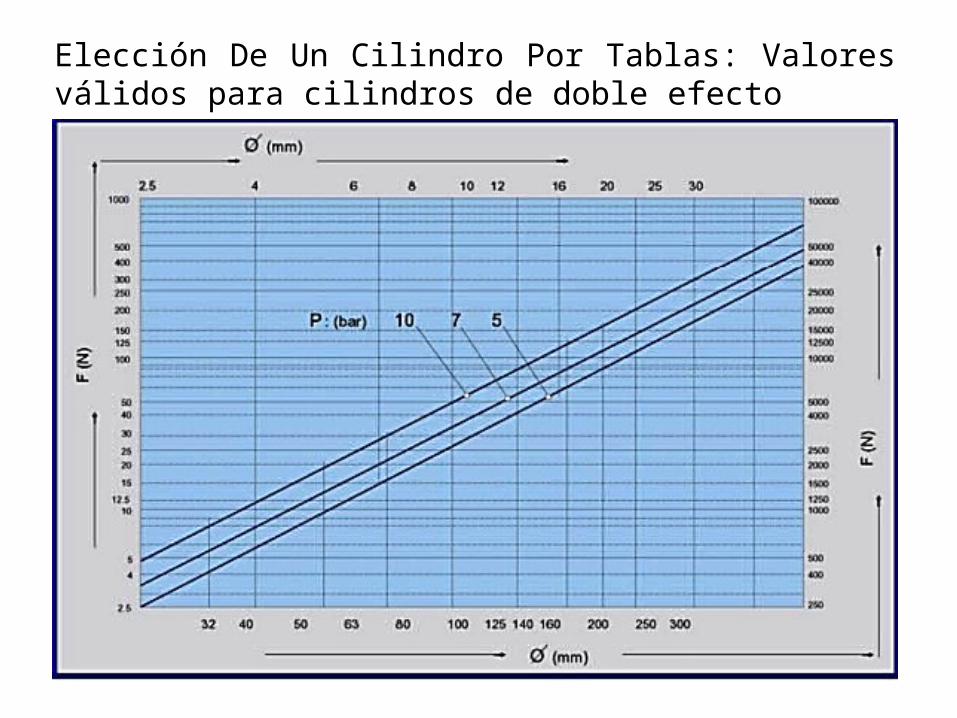
Elección De Un Cilindro Por Tablas: Valores válidos para cilindros de doble efecto
Longitud De Carrera
La longitud de carrera en cilindros neumáticos no debe exceder de 2000 mm. Con émbolos de gran tamaño y carrera larga, el sistema neumático no resulta económico por el elevado consumo de aire y precio de los actuadores.
Cuando la carrera es muy larga, el esfuerzo mecánico del vástago y de los cojinetes de guía, es demasiado grande.
Para evitar el riesgo de pandeo, si las carreras son grandes, deben adoptarse vástagos de diámetro superior a lo normal.
Además, al prolongar la carrera, la distancia entre cojinetes aumenta y, con ello, mejora la guía del vástago.
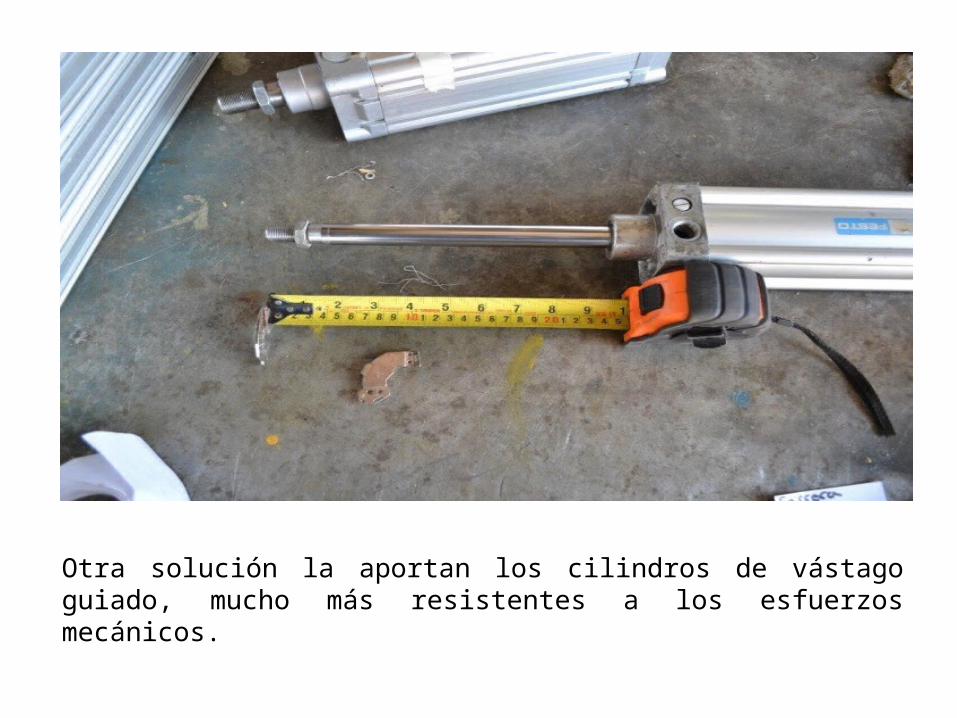
Otra solución la aportan los cilindros de vástago guiado, mucho más resistentes a los esfuerzos mecánicos.
Velocidad Del Émbolo
La velocidad del émbolo, en cilindros neumáticos depende de la fuerza antagonista, de la presión del aire, de la longitud de la tubería, de la sección entre los elementos de mando y trabajo y del caudal que circula por el elemento de mando.
Además, influye en la velocidad la amortiguación de final de carrera. Cuando el émbolo abandona la zona de amortiguación, el aire entra por una válvula antirretorno y de estrangulación y produce un aumento de la velocidad.
La velocidad media del émbolo, en cilindros estándar, está comprendida entre 0,1 y 1,5 m/s. Con cilindros especiales (cilindros de impacto) se alcanzan velocidades de hasta 10 m/s.
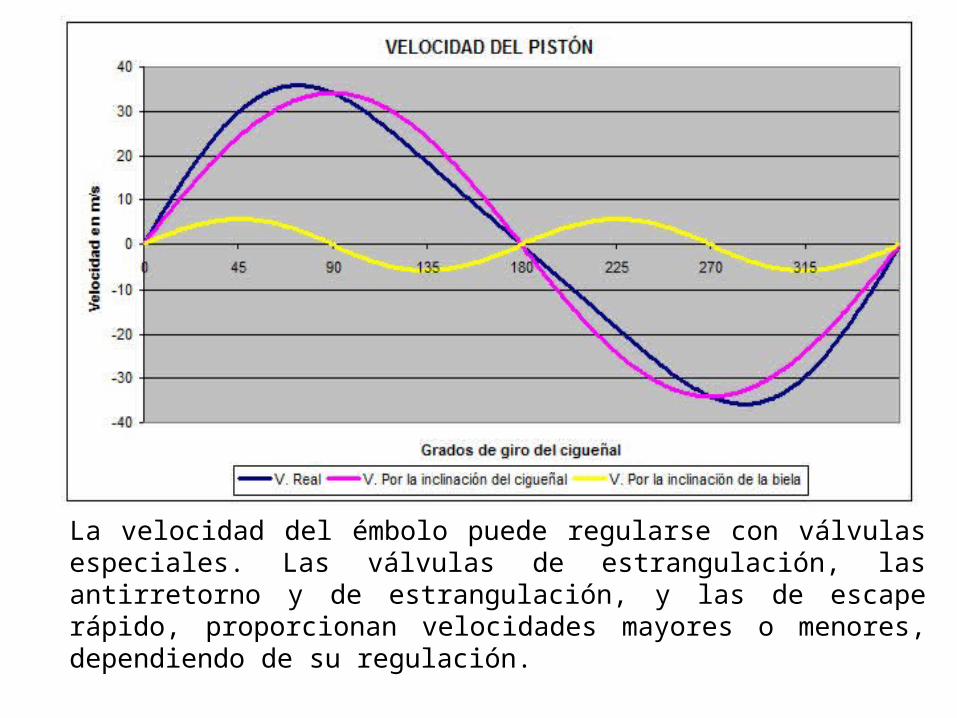
La velocidad del émbolo puede regularse con válvulas especiales. Las válvulas de estrangulación, las antirretorno y de estrangulación, y las de escape rápido, proporcionan velocidades mayores o menores, dependiendo de su regulación.
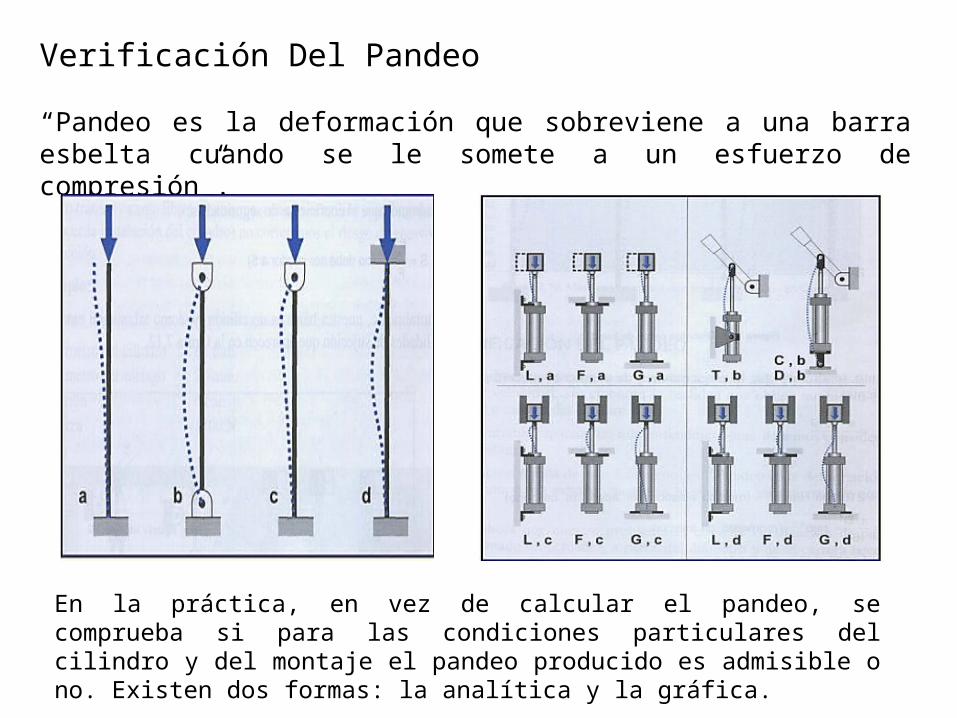
Verificación Del Pandeo
“Pandeo es la deformación que sobreviene a una barra esbelta cuando se le somete a un esfuerzo de compresión”.
En la práctica, en vez de calcular el pandeo, se comprueba si para las condiciones particulares del cilindro y del montaje el pandeo producido es admisible o no. Existen dos formas: la analítica y la gráfica.
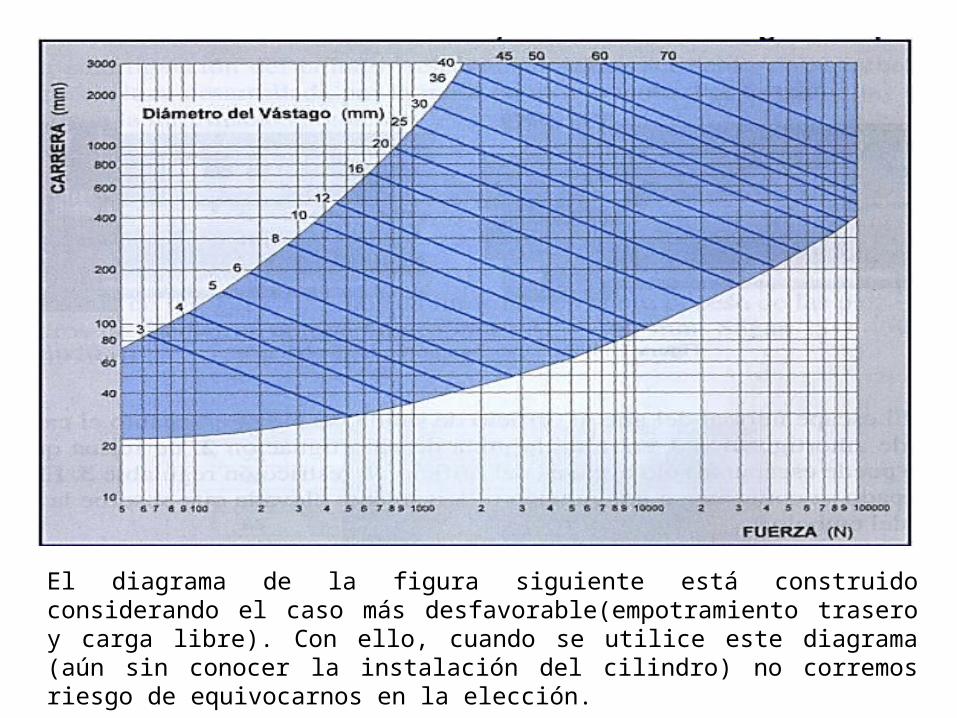
El diagrama de la figura siguiente está construido considerando el caso más desfavorable(empotramiento trasero y carga libre). Con ello, cuando se utilice este diagrama (aún sin conocer la instalación del cilindro) no corremos riesgo de equivocarnos en la elección.
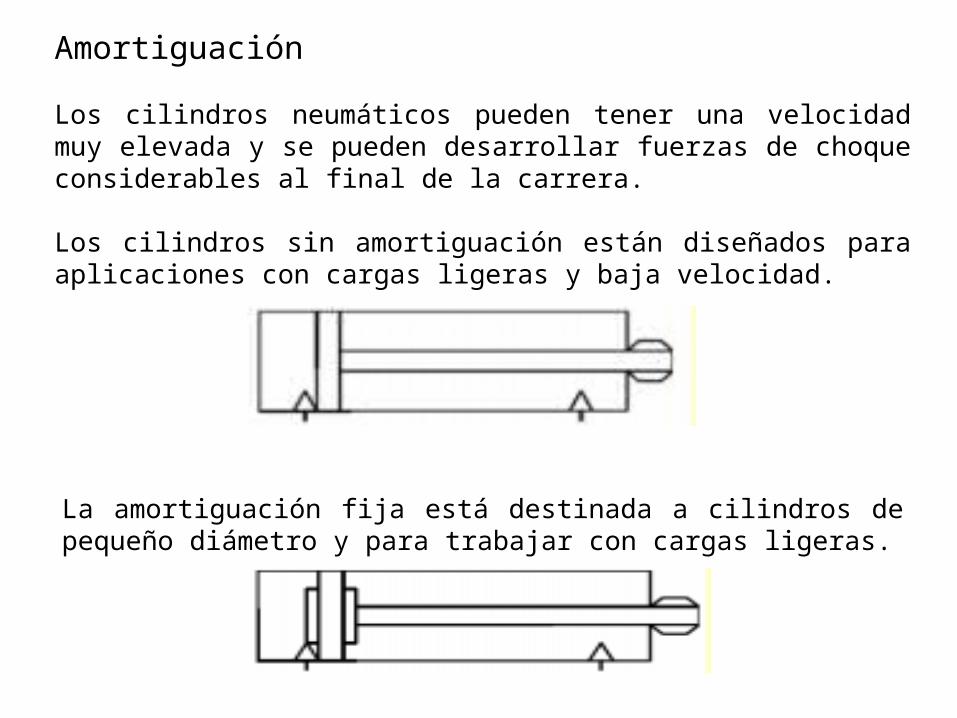
Amortiguación
Los cilindros neumáticos pueden tener una velocidad muy elevada y se pueden desarrollar fuerzas de choque considerables al final de la carrera.
Los cilindros sin amortiguación están diseñados para aplicaciones con cargas ligeras y baja velocidad.
La amortiguación fija está destinada a cilindros de pequeño diámetro y para trabajar con cargas ligeras.
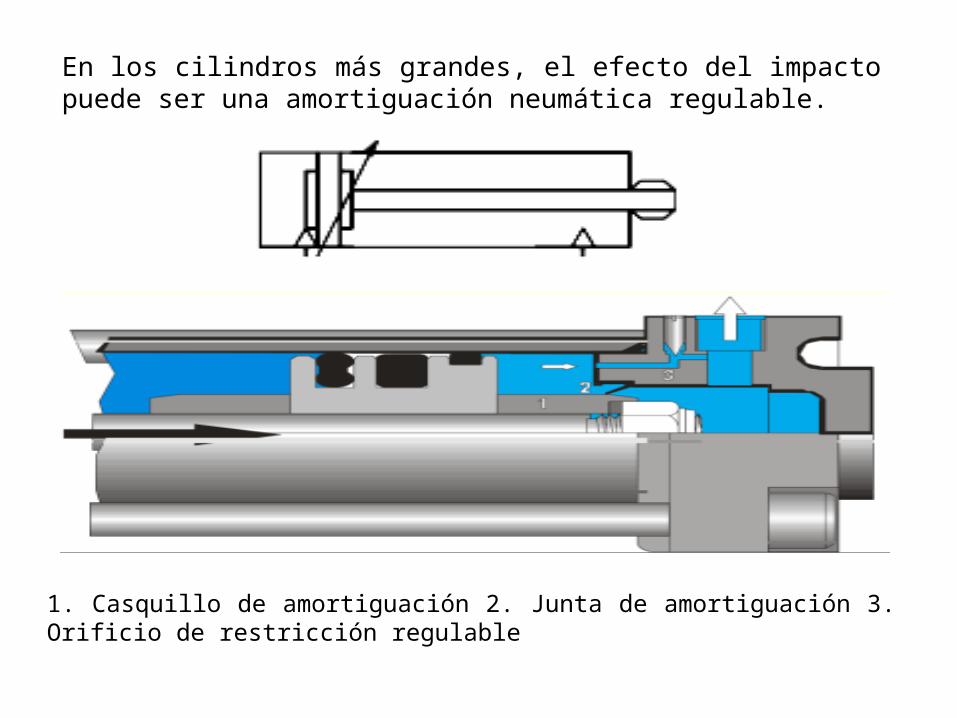
En los cilindros más grandes, el efecto del impacto puede ser una amortiguación neumática regulable.
1. Casquillo de amortiguación 2. Junta de amortiguación 3. Orificio de restricción regulable
Consumo De Aire
Para disponer de aire y conocer el gasto de energía, es importante conocer el consumo de la instalación, cálculo que comenzará por los actuadores (potencia). Para una presión de trabajo, un diámetro y una carrera de émbolo determinado, el consumo de aire se calcula como sigue: La formula de cálculo por embolada, resulta: Q = 2 (S n q)⋅ ⋅
Con ayuda de tablas, se puede establecer los datos del consumo de aire de una manera más sencilla y rápida. Los valores están expresados por cm de carrera para los diámetros más corrientes de cilindros y para presiones de 100 a 1500 kPa. (1-15 bar).
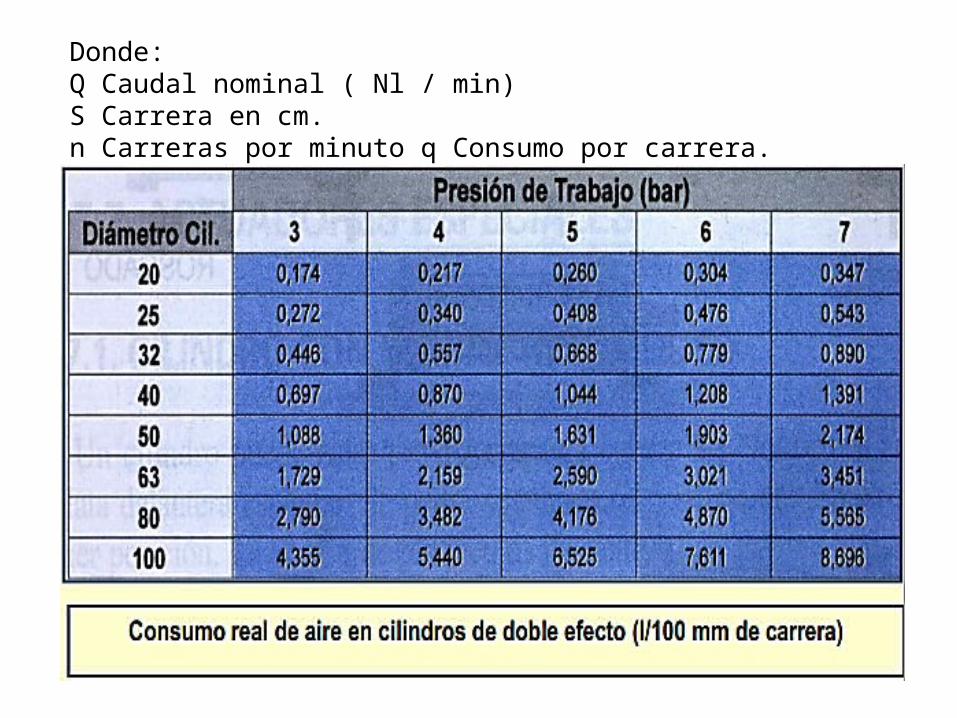
Donde:Q Caudal nominal ( Nl / min)S Carrera en cm.n Carreras por minuto q Consumo por carrera.
Fijaciones
El tipo de fijación es importante ya que el cilindro puede ir equipado de los accesorios de montaje necesarios. De lo contrario, como dichos accesorios se construyen según el sistema de piezas estandarizadas, también más tarde puede efectuarse la transformación de un tipo de fijación a otro.
Este sistema de montaje facilita el almacenamiento en empresas que utilizan a menudo el aire comprimido, puesto que basta combinar el cilindro básico con las correspondientes piezas de fijación.
La principal ventaja que ofrecen los sistemas de fijación no fijos, es que un mismo cilindro puede colocarse en una máquina de distintas formas según el tipo de fijación.