
Sensores inductivos y plc
16
description
Jimmy,Jhonathan, Jorge
Transcript of Sensores inductivos y plc
Los sensores inductivos son detectoreselectrónicos que sirven para detectarmateriales ferrosos sin necesidad decontacto físico, se basa en la variación delos campos electromagnéticos.
Pueden detectar objetos que se le acerquentanto axial como lateralmente. La distanciamáxima a la que son capaces de detectarun objeto está en torno a los 20 milímetrossegún el tipo y tamaño de este.
son insensibles a las vibraciones y no
presentan inseguridad de contacto
debido a acercamientos lentos como
puede suceder en sensores o
detectores con actuadores mecánicos
Sus principales aplicaciones suelen ser:
Detectar la presencia y paso de piezas
metálicas.
Fin de carrera.
Rotación, contaje ...
Los sensores inductivos hacen uso de las propiedades
magnéticas de diversos materiales, y de las
variaciones de diferentes parámetros asociados a los
circuitos magnéticos (longitudes o secciones de
núcleos, entrehierros, ...), para alterar la inductancia
de bobinas normalmente fijas, consiguiendo variar la
geometría del circuito magnético, permitiéndole
detectar la presencia de objetos metálicos.
Cuando un metal conductor o placa metálica se
mueven dentro de un campo magnético, sobre la
placa o el metal se generan unas corrientes léctricas
conocidas como corrientes de Eddy o corrientes de
Focault.
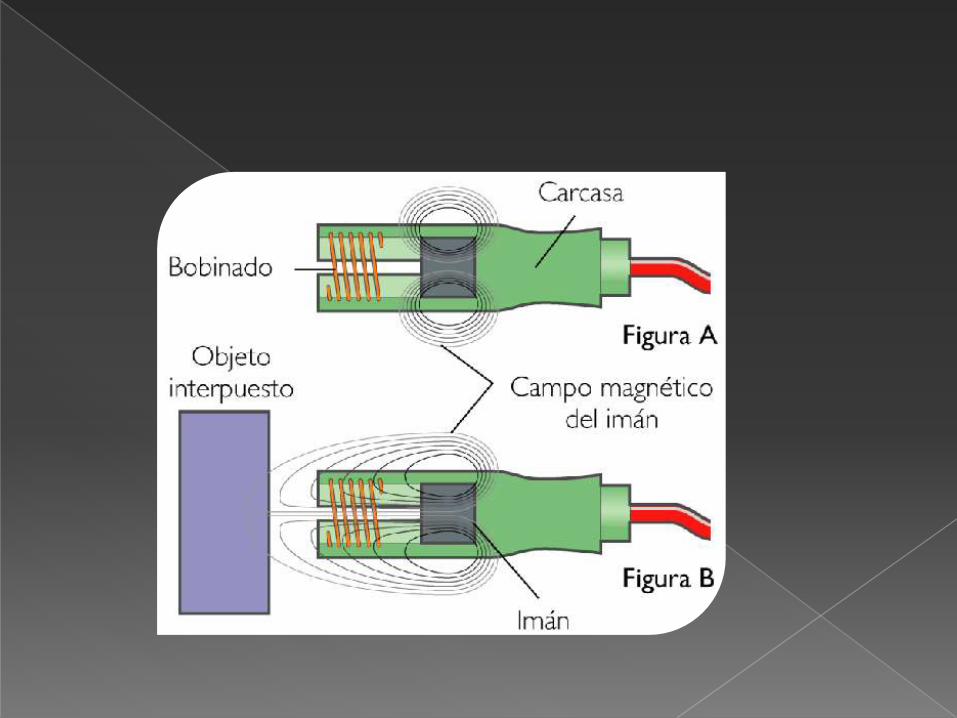
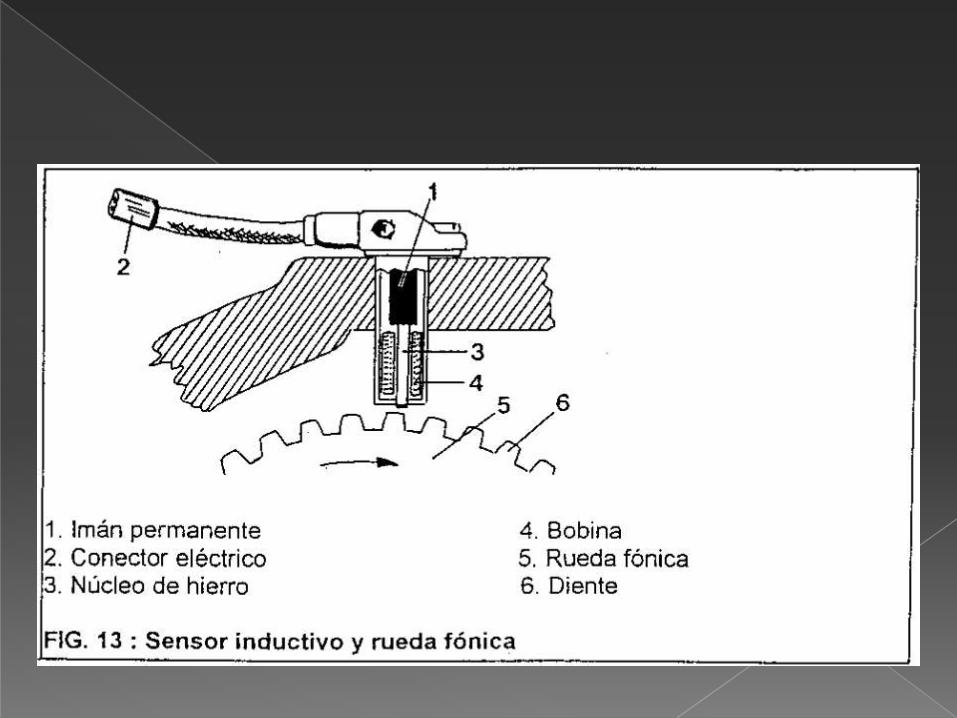
Este es el principio que usan la mayor parte de los
sensores inductivos empleados en la industria. En ellos
la bobina sensora está provista de un núcleo
descubierto hacia el lado de detección, al aplicar
tensión al sensor la bobina produce un campo
magnético alterno de alta frecuencia, dirigido hacia
el lado activo o sensible.
Al acercarse un metal al lado activo, se
presenta en éste una inducción parásita
y unas corrientes parásitas, las cuales
influyen en el circuito oscilador,
reduciendo la amplitud de oscilación y
reduciendo el consumo de corriente del
sensor. Estas señales son tratadas por el
circuito rectificador y comparador,
emitiendo la correspondiente señal de
salida
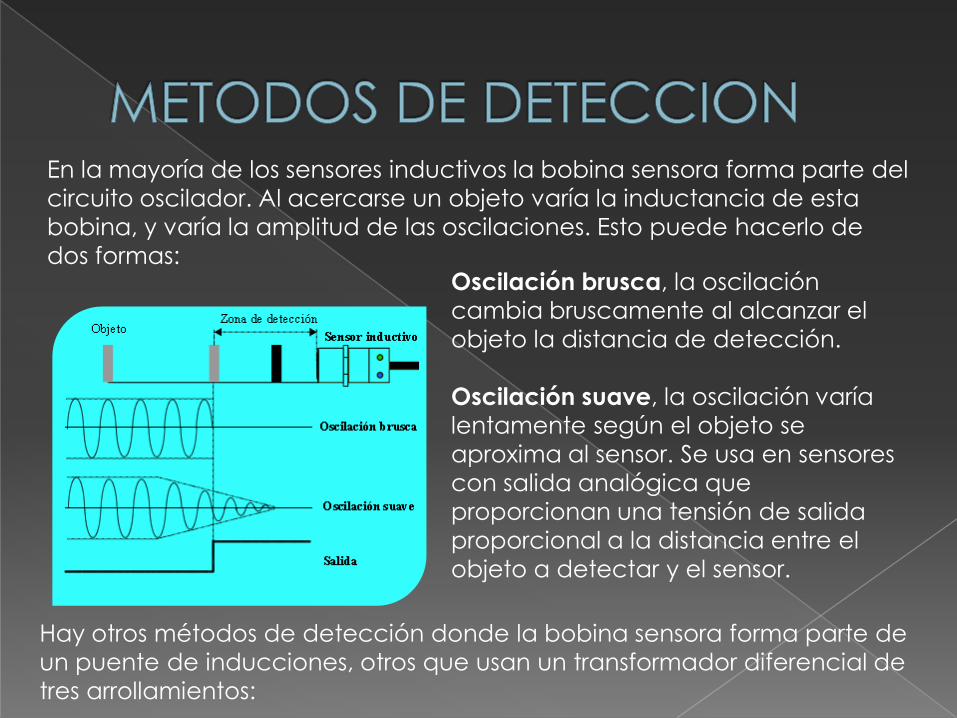
En la mayoría de los sensores inductivos la bobina sensora forma parte del
circuito oscilador. Al acercarse un objeto varía la inductancia de esta
bobina, y varía la amplitud de las oscilaciones. Esto puede hacerlo de
dos formas:Oscilación brusca, la oscilación
cambia bruscamente al alcanzar el
objeto la distancia de detección.
Oscilación suave, la oscilación varía
lentamente según el objeto se
aproxima al sensor. Se usa en sensores
con salida analógica que
proporcionan una tensión de salida
proporcional a la distancia entre el
objeto a detectar y el sensor.
Hay otros métodos de detección donde la bobina sensora forma parte de
un puente de inducciones, otros que usan un transformador diferencial de
tres arrollamientos:

Para la elección de un sensor inductivo se deben tener en
cuenta las características que el fabricante nos proporciona.
ELECTRICAS MECANICAS DE DETECCION
Alimentación
Consumo
Corriente de
carga
Nominal
Grado de
Protección
Carcasa
Resistencia
Golpes
Histéresis
Objeto a detectar
Sensibilidad
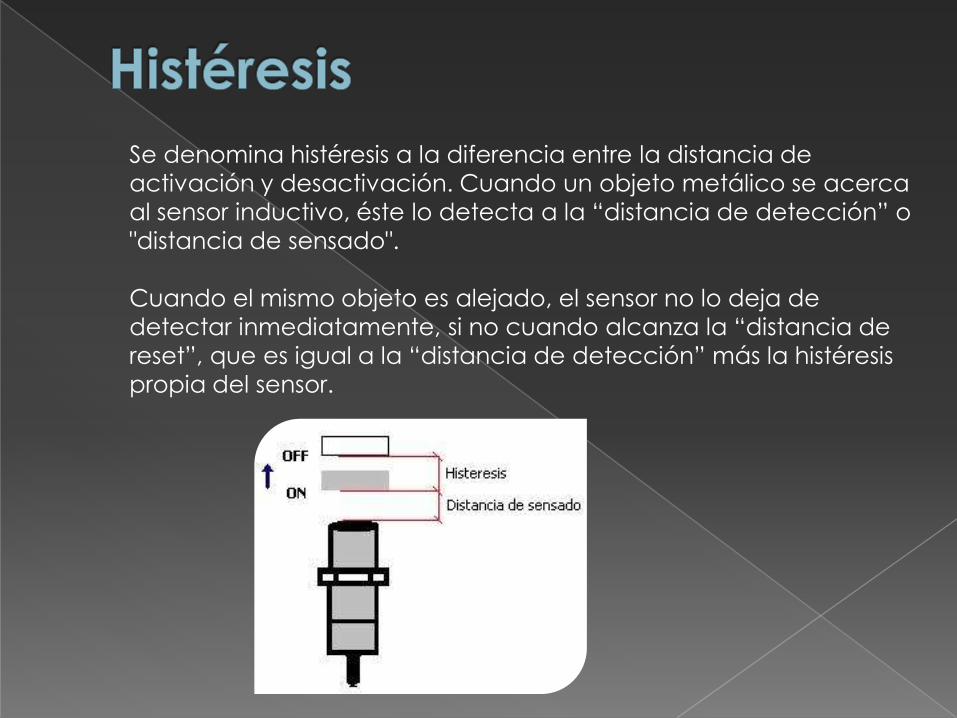
Se denomina histéresis a la diferencia entre la distancia de
activación y desactivación. Cuando un objeto metálico se acerca
al sensor inductivo, éste lo detecta a la “distancia de detección” o
"distancia de sensado".
Cuando el mismo objeto es alejado, el sensor no lo deja de
detectar inmediatamente, si no cuando alcanza la “distancia de
reset”, que es igual a la “distancia de detección” más la histéresis
propia del sensor.
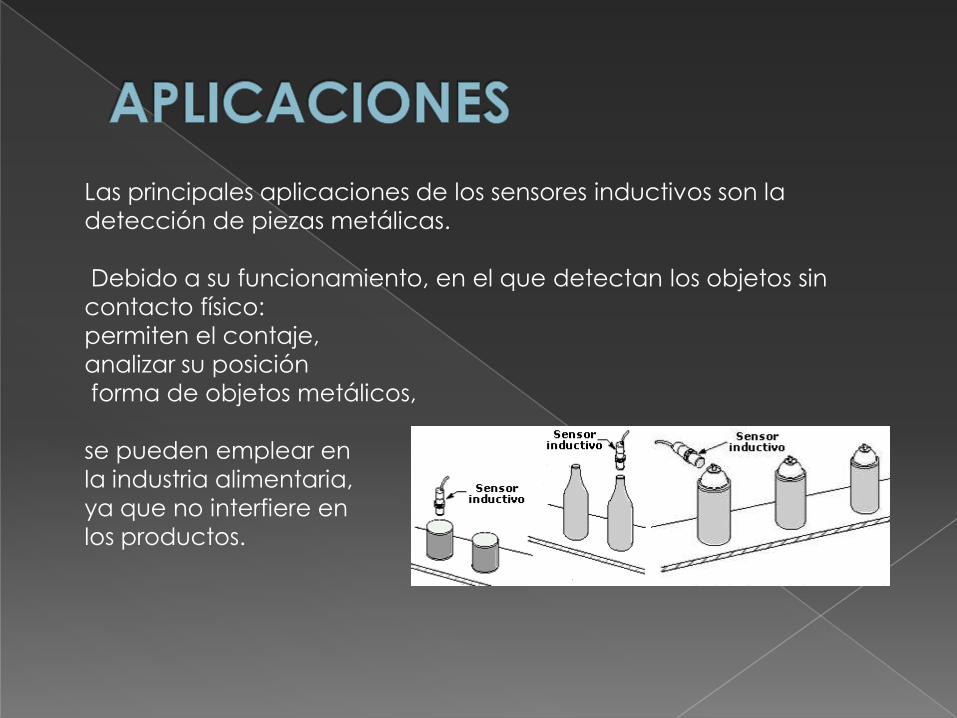
Las principales aplicaciones de los sensores inductivos son la
detección de piezas metálicas.
Debido a su funcionamiento, en el que detectan los objetos sin
contacto físico:
permiten el contaje,
analizar su posición
forma de objetos metálicos,
se pueden emplear en
la industria alimentaria,
ya que no interfiere en
los productos.
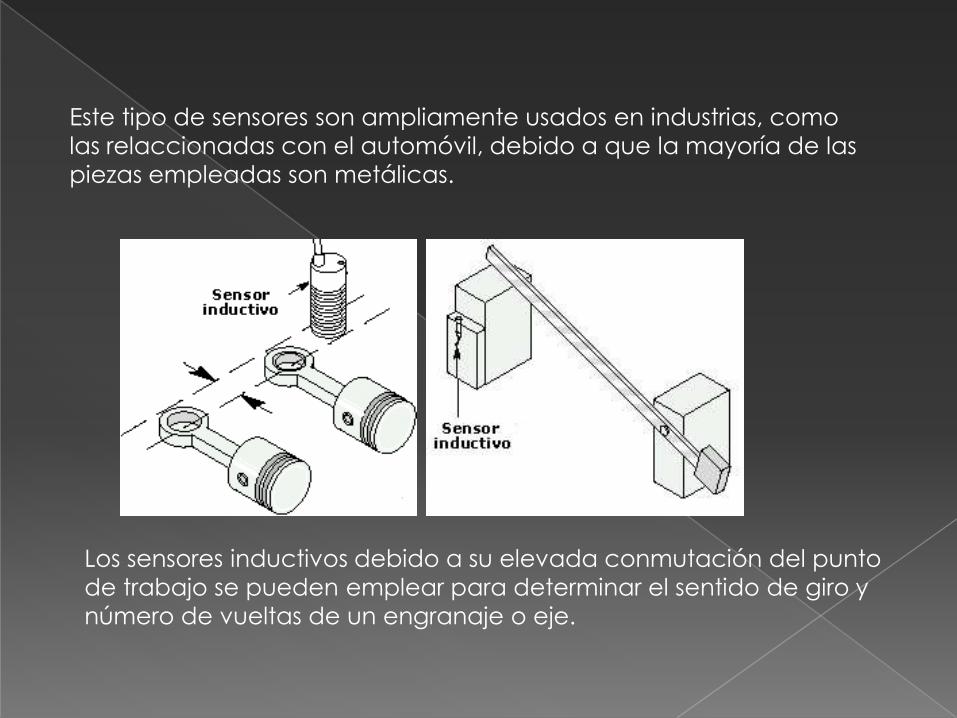
Este tipo de sensores son ampliamente usados en industrias, como
las relaccionadas con el automóvil, debido a que la mayoría de las
piezas empleadas son metálicas.
Los sensores inductivos debido a su elevada conmutación del punto
de trabajo se pueden emplear para determinar el sentido de giro y
número de vueltas de un engranaje o eje.

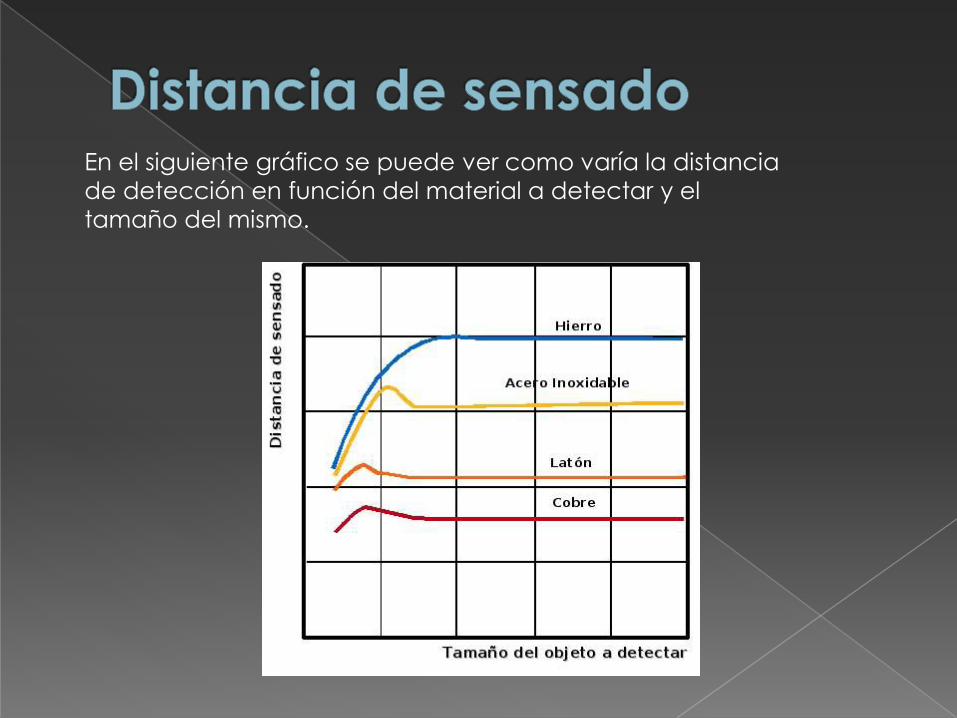
En el siguiente gráfico se puede ver como varía la distancia
de detección en función del material a detectar y el
tamaño del mismo.


















