
Servomotores
5
Control básico de servomotores con Arduino María Guadalupe García Muñoz|Programar o morir UNIVERSIDAD TECNOLOGICA DEL VALLE DE TOLUCA
-
Upload
morita-munoz -
Category
Documents
-
view
212 -
download
0
description
Control de servos con Arduino
Transcript of Servomotores

Control básico de servomotores con Arduino
María Guadalupe García Muñoz|Programar o morir UNIVERSIDAD TECNOLOGICA DEL VALLE DE TOLUCA

MARÍA GUADALUPE GARCÍA MUÑOZ|PROGRAMAR O MORIR
1
Contenido OBJETIVO ............................................................................................................................................. 2
EJEMPLO .............................................................................................................................................. 3
CIRCUITO ......................................................................................................................................... 3
CÓDIGO ........................................................................................................................................... 4
MARÍA GUADALUPE GARCÍA MUÑOZ|PROGRAMAR O MORIR
2
OBJETIVO Conocer el funcionamiento de los servomotores y control de estos sobre arduino, todo de una
manera sencilla y gráfica para simplificar todo el proceso, siendo sin duda un buen ejemplo para
iniciarse en el uso de Arduino + Servomotores.
MARÍA GUADALUPE GARCÍA MUÑOZ|PROGRAMAR O MORIR
3
EJEMPLO Elementos necesarios para copletar la practica con Arduino:
Arduino
Servomotor no importa el peso que soporte.
Cables M/M para conexión facil, fiable y flexible entre Arduino, ProtoBoard y Servo
Protoboard
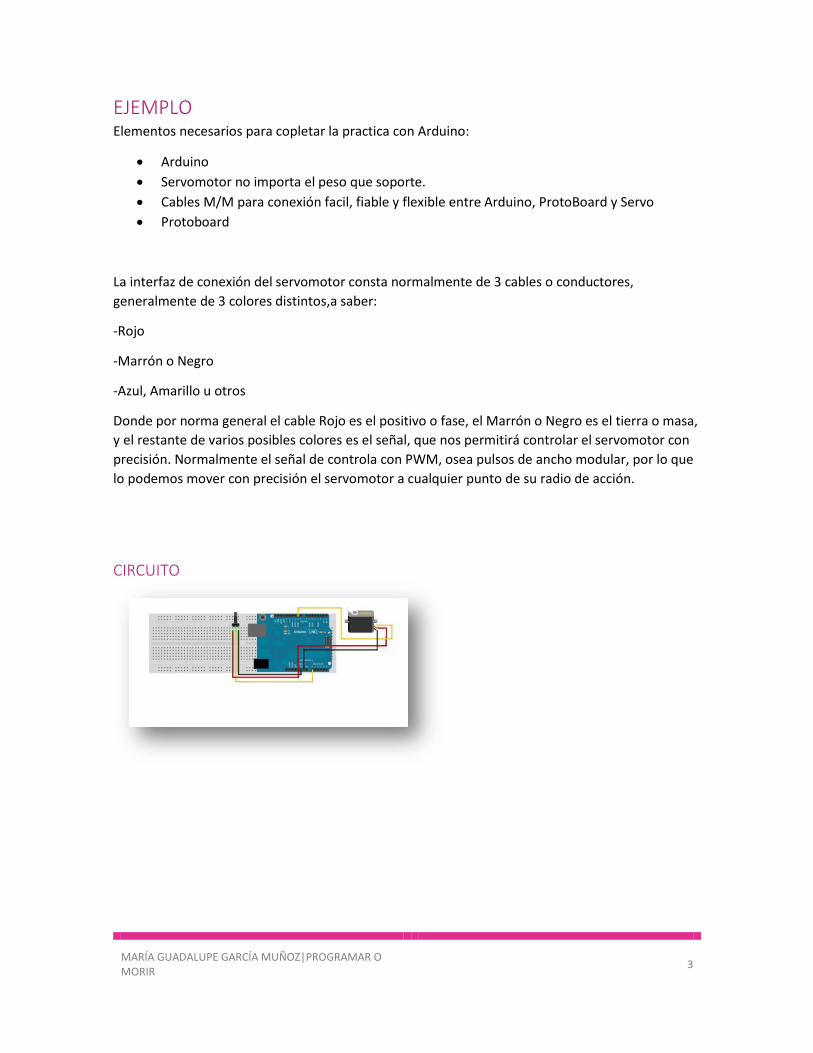
La interfaz de conexión del servomotor consta normalmente de 3 cables o conductores,
generalmente de 3 colores distintos,a saber:
-Rojo
-Marrón o Negro
-Azul, Amarillo u otros
Donde por norma general el cable Rojo es el positivo o fase, el Marrón o Negro es el tierra o masa,
y el restante de varios posibles colores es el señal, que nos permitirá controlar el servomotor con
precisión. Normalmente el señal de controla con PWM, osea pulsos de ancho modular, por lo que
lo podemos mover con precisión el servomotor a cualquier punto de su radio de acción.
CIRCUITO

MARÍA GUADALUPE GARCÍA MUÑOZ|PROGRAMAR O MORIR
4
CÓDIGO Las librerías las puedes encontrar en http://arduino.cc/en/Tutorial/HomePage en la sección de
librerías.
#include <Servo.h>
1. 2. Servo servo1; // Crea un Objeto servo 3. int posicion; // Variable de la posicion del servo 4. 5. void setup() 6. { 7. servo1.attach(2); // Selecionamos el pin 2 como el pin de control para els ervo 8. } 9. 10. void loop() 11. { 12. 13. posicion = 150; // Establecemos el valor de la posicion a 150º 14. posicion = map(posicion, 0, 1023, 0, 179); // Establecemos la relacion entre
los grados de giro y el PWM 15. /* Con el mapa de valores anterior establecemos una relacin proporcional */ 16. /* entre el pulso minimo 0 con el grado minimo, 0 tambien y el pulso maximo*/ 17. /* 1023 con el grado maximo, 179*/ 18. servo1.write(posicion); // Escribimos la posicion con el mapa d
e valores al servo 19. delay(150); // Y le damos un tiempo para que sea capaz
de moverse 20. }












![MADEL SQR 2017 ES [Modo de compatibilidad]€¦ · Belimo LM/NM Belimo LF/NF Siemens GEB/GMA 04/17 ACCESSORIOS - SERVOMOTORES Servomotores ON/OFF ... TF Termostato con cables, de](https://static.fdocumento.com/doc/165x107/5ea3c6bf8f049511f2332f7e/madel-sqr-2017-es-modo-de-compatibilidad-belimo-lmnm-belimo-lfnf-siemens-gebgma.jpg)





