
SISTEMA DE SIMULACIÓN Y CONTROL PARA LA MANIPULACIÓN DE UN ... · de simulación y control de...
78
PROPUESTA PARA EL TRABAJO DE GRADO DE MAESTRÍA SISTEMA DE SIMULACIÓN Y CONTROL PARA LA MANIPULACIÓN DE UN CUADRICÓPTERO Autor. Ing. Tito González Tutor. PhD. José Luis Rodríguez San Cristóbal 07 de Marzo del 2017
-
Upload
nguyencong -
Category
Documents
-
view
216 -
download
0
Transcript of SISTEMA DE SIMULACIÓN Y CONTROL PARA LA MANIPULACIÓN DE UN ... · de simulación y control de...
PROPUESTA PARA EL TRABAJO DE GRADO DE MAESTRÍA
SISTEMA DE SIMULACIÓN Y CONTROL PARA LAMANIPULACIÓN DE UN CUADRICÓPTERO
Autor.Ing. Tito González
Tutor.PhD. José Luis Rodríguez
San Cristóbal07 de Marzo del 2017

ÍNDICE
CAPÍTULO I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.1. Planteamiento del problema . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2. Formulación del problema . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.3. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.1. Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 81.3.2. Objetivos específicos . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 8
1.4. Justificación de la Investigación . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
CAPÍTULO II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1. Antecedentes de la investigación . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2. Bases Teóricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.1. Un poco de Historia . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 142.2.2. Principios de operación del cuadrirotor . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2.3. Sistema de coordenadas . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 202.2.4. Ángulos de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . 222.2.5. Teoría de control moderno . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 24
2.2.5.1. Teoría de control moderno frente a la teoría de control clásico . . . . . . 242.2.5.2. Estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 242.2.5.3. Variables de estado . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . 252.2.5.4. Vector de estado . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . 252.2.5.5. Espacio de estados . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . 252.2.5.6. Ecuaciones en el espacio de estados . . . . . . .. . . . . . . . . . . . . . . . . . . . 25
2.2.6. Introducción al Control Óptimo . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 282.2.6.1. El principio de optimalidad . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . 292.2.6.2. Control LQ en tiempo continuo . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . 30
CAPÍTULO III . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.1. Modelo de la investigación . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.2. Nivel de la investigación . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.3. Diseño de la investigación . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.4. Cronograma de actividades . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.5. Diagrama de avance . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . 34
CAPÍTULO IV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.1. Modelado matemático del sistema. . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2. Conceptos y generalidades. . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.3. Matriz de rotación, consideración aeronáutica .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.4. Modelado matemático del cuerpo del cuadricóptero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.5. Modelado matemático del motor y la propela. . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 2 / 78

CAPÍTULO V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 455.1. Estrategia de control. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.2. Resumen del modelo matemático del cuatrirotor.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.3. Modelo en el espacio de estado. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.4. Modelo lineal en el espacio de estado. . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.5. Linealización en el espacio de estado. . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515.6. Controlabilidad y Observabilidad del sistema linealizado. . . . . . . . . . . . . . . . . . . . . . . . . . 545.7. Control de posición por medio de un Regulador Lineal Cuadrático (LQR). . . . . . . . . . . . 565.8. Estructura del programa de simulación. . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
CAPÍTULO VI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 606.1. Resultados de la simulación. . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 606.2. Análisis de los resultados de la simulación. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
CAPÍTULO VII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.1. Conclusiones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . 73
REFERENCIAS BIBLIOGRÁFICAS . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . 74
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 3 / 78

ÍNDICE DE FIGURAS
Figura 1 Cuadricóptero Convertawings Modelo A. . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 15Figura 2 V-22 Osprey. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 16Figura 3 Diseño conceptual del “QTR, V-44” de Bell Aircraft Corporation. . . . . . . . . . . . . . . . . . . . 16Figura 4 El Moller Skycar durante una prueba de despegue. .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Figura 5 Moller Volantor M200X . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 17Figura 6 Ángulos de rotación del Cuadrotor. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Figura 7 Algunas acciones para movimiento simple del Cuadrirotor. . . . . . . . . . . . . . . . . . . . . . . . . . 19Figura 8 Sistemas de coordenadas de referencia. . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Figura 9 Ejes de rotación de cualquier aeronave. . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Figura 10 Rotación según los ángulos de Euler. . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Figura 11 Diagrama de bloques del sistema de espacio de estado linealizado . . . . . . . . . . . . . . . . . . 27Figura 12 Posibles trayectorias del estado 1 al 8. . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Figura 13 Esquema de control LQR . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 57Figura 14 Mapa de polos y ceros en lazo abierto del sistema linealizado. . . . . . . . . . . . . . . . . . . . . . 60Figura 15 Respuesta al escalón unitario en lazo abierto. . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Figura 16 Respuesta de MATLAB sobre la ubicación de los polos y rangos de las matrices. . . . . . . 61Figura 17 Mapa de polos y ceros del sistema discreto. . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62Figura 18 Respuesta del sistema discreto a una entrada escalón unitario. . . . . . . . . . . . . . . . . . . . . . . 62Figura 19 Respuesta de MATLAB sobre la ubicación de los polos y rangos de las matrices. . . . . . . 63Figura 20 Respuesta al seguimiento de la trayectoria. . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Figura 21 Velocidades del vehículo en el sistema inercial de coordenadas. . . . . . . . . . . . . . . . . . . . . 64Figura 22 Valores de la postura del cuatrirotor. . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64Figura 23 Valores de los rotacionales del artefacto aéreo. .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Figura 24 Trayectoria realizada. . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . 65Figura 25 Valores de la acción de control en las propelas. .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66Figura 26 Navegación con Qz=1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 67Figura 27 Navegación con Qz=10. . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 68Figura 28 Navegación con Qz=100. . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 68Figura 29 Navegación con Qz=1000. . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 69Figura 30 Navegación con Qz=10000. . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 69Figura 31 Navegación con Qz=100000. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 70
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 4 / 78

ÍNDICE DE TABLAS
Tabla 4.1. Principales efectos que actúan sobre un cuadricóptero. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Tabla 6.1. Valores de las coordenadas de navegación, en metros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 5 / 78

CAPÍTULO I
1.1. Planteamiento del problema.
El cuadricóptero es un artefacto volador que puede modificar su posición y su orientación por mediode cuatro rotores o hélices que son controladas en su rotación de manera independiente y que en suma desus acciones proveen la actuación en esta clase de vehículos aéreos. Como tal, los cuatrirotores son una delas posibles variantes en la familia de los multicópteros o artefactos con varios elementos rotatorios parala elevación y maniobra.
Durante el siglo XX se realizaron múltiples intentos para implementaciones prácticas decuadricópteros tripulados, remontandose los primeros ensayos al año 1922 en Francia con la autoría deEtienne Oemichen [1] , y en Estados Unidos de América (EEUU) con la autoría de George Bothezat [2].Sin embargo, durante la evolución de la industria aeronáutica de los multicópteros fue necesario el ensayode diferentes esquemas de ajuste de los rotores a efectos de mejorar la maniobrabilidad.
En las últimas décadas, gracias a los avances de las tecnologías constructivas en cuanto a laminiaturización de componentes electrónicos como: microcontroladores, motores eléctricos, sensores,actuadores, y software, se incrementó en gran medida la posibilidad de construir pequeños vehículos aéreosno tripulados (Unmanned Aerial Vehicles, UAVs) pero operados a control remoto (teleoperados) lo cualfacilitó a un creciente número de investigadores retomar el interés en los dispositivos cuadrirotor por sufacilidad de construcción.
Aunque actualmente los cuadricópteros son utilizados fundamentalmente como juguetes o para lacaptura de imágenes panorámicas (fotografía, video) gracias a la altura que pueden alcanzar, hay uncreciente interés a nivel universitario para utilizarlo como banco de pruebas mecatrónico en la enseñanzade la teoría de control de sistemas no lineales, aparte de que también es un muy buen prospecto para suaplicación en otras áreas.
En cuanto al campo universitario, se busca expandir su capacidad de maniobrabilidad en lateleoperación, autonomía, e inteligencia [3] con el fin de poder utilizarlo en operaciones de vigilancia oreconocimiento, inspección de instalaciones y estructuras, mapeo de terrenos [4], búsqueda y rescate [5],combate de incendios, o como un elemento dentro de un grupo que debe dar cumplimiento a una tarea depropósito general [6].
Por otra parte, los cuadricópteros tienen ventajas tales como: alta maniobrabilidad, relativo bajoprecio, y construcción muy simple. Características que le proporcionan un gran potencial en su uso comodispositivos robóticos autónomos.
Sin embargo, existen varios problemas operativos que tienen que ser resueltos o mejorados parapoder utilizarlos en aplicaciones reales. Uno de estos problemas es el hecho de que como artefacto aéreoy en términos de la Ingeniería Aeronáutica es un sistema altamente no-lineal y multivariable, ya que poseeseis grados de libertad (6 GDL), tres para la posición (x, y, z), tres para la orientación (viraje, elevación,rotación), y solo cuatro actuadores, con lo cual se transforma en un sistema no holonómico. Es decir, es un
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 6 / 78

sistema subactuado [7] o que posee un número menor de salidas de control en relación a los grados delibertad y por tanto no puede moverse de manera traslativa sin antes rotar sobre uno de sus ejes.
Por otra parte, esta condición operativa también hace al cuadricoptero un sistema inestable pornaturaleza (lazo abierto) y de muy difícil control debido al acoplamiento no lineal entre los actuadores ylos grados de libertad [8]. Es por estas condiciones que es un proyecto de mucho interés en el área deingeniería de control, ya que la regulación de la posición (3 GDL), la regulación de la orientación (3 GDL),junto con la regulación de las velocidades lineales y angulares exige una robusta arquitectura de control, ya que es indispensable coordinar el funcionamiento de los cuatro rotores a un mismo tiempo para podercumplir con las exigencias de la maniobra de vuelo.
A pesar de las dificultades y exigencias anteriormente indicadas, se han obtenido muy buenosresultados en el control del funcionamiento del cuadricóptero como se desprende de los resultados dellaboratorio GRASP de la Universidad de Pensilvania, EEUU, y del proyecto “Flying Machine Area” dela Universidad de Zurich, Suiza.
De aquí, que la principal motivación para el desarrollo de este trabajo es la creación de un sistemade simulación y control de seis grados de libertad por medio del modelo matemático preestablecido delcuadrirotor y con el uso de las variables de estado crear un Regulador Lineal Cuadrático (Linear QuadraticRegulator, LQR) con el cual se espera controlar la posición y la orientación del cuadricóptero en funciónde las ordenes de maniobra aérea.
En relación a lo establecido en el párrafo anterior, se debe indicar que en función de laspublicaciones revisadas y que serán indicadas con mas detalle en el apartado correspondiente a losantecedentes de esta investigación, se opta por utilizar la teoría de control moderno al seleccionar uncontrolador optimo del tipo lineal cuadrático.
1.2. Formulación del problema.
Para la creación del sistema de simulación se hace imprescindible la solución de varias tareas. Alprincipio debe evaluarse diversos modelos matemáticos ya desarrollados a objeto de seleccionar el que vaa ser utilizado para representar al cuadricóptero en las simulaciones.
A este respecto debe indicarse que el modelado matemático del cuadrirotor consiste en ladescripción de su dinámica de cuerpo rígido, la cinemática con respecto a los marcos de referencia, fijosy del vehículo, y de las fuerzas aplicadas al cuadrirotor durante las maniobras. En función de lo anteriorse hace necesario indicar que existen varios métodos para determinar el modelo del artefacto. En primerlugar, estos pueden variar en la descripción de la dinámica de cuerpo rígido, ya que esta puede serdeterminada por medio de las ecuaciones de Euler [9], o por medio de la aproximación de Euler-Newton[10], o por medio de la aproximación de los Lagrangianos [11]. En segundo lugar, estos pueden variar enla representación final de la cinemática y la dirección del eje ‘z’ del marco de referencia del artefacto. Entercer lugar, estos pueden variar en la consideración de cuantas fuerzas y otros efectos de perturbacióndeben ser tomados en cuenta.
Una vez determinado el modelo a utilizar, y basado en este, se debe diseñar por medio de las
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 7 / 78

variables de estado del vehículo el controlador lineal cuadrático de seis grados de libertad con la utilizaciónde solamente cuatro acciones de control, donde la interrelación entre el modelo matemático delcuadricoptero y el controlador que realizará los ajuste para que el modelo siga las ordenes de maniobra, seimplementará utilizando el software de procesamiento matemático MATLAB y cualquiera de susherramientas asociadas.
Una vez acoplado el controlador con el modelo de la planta se ejecutarán una serie de acciones demaniobra ajustadas a la realidad operativa del artefacto, y de cuyos resultados se obtendrán lasconsideraciones para realizar la entonación del controlador. Realizados los ajustes en el regulador linealcuadrático, se ejecutarán nuevamente las maniobras preestablecidas a objeto de comprobar el correctofuncionamiento del conjunto.
1.3. Objetivos.
A continuación se indican las metas que se alcanzan lograr con la presente investigación.
1.3.1. Objetivo general.
Desarrollar un sistema de simulación en el que se utilice la teoría de control moderno para lamanipulación operativa del cuadricóptero.
1.3.2. Objetivos específicos.
Determinar el modelo matemático que representará al cuadricóptero.
Diseñar el controlador lineal cuadrático de seis grados de libertad y cuatro actuadores.
Implementar el modelo del cuadricóptero y el controlador lineal cuadrático en el programaMATLAB y sus herramientas asociadas.
Desarrollar las acciones de maniobra para la entonación del controlador lineal cuadrático.
Evaluar el funcionamiento del controlador lineal cuadrático.
1.4. Justificación de la Investigación.
El desarrollo de este trabajo permitirá la creación de un sistema de simulación computacional quefacilitará a los estudiantes de maestría en las áreas de matemática aplicada (modelado matemático) y teoríade control (Ing. Electrónica) el afianzamiento en los conocimientos adquiridos, ya que a través de lasimulación se experimentará con un sistema que representa a un dispositivo físico sin el riesgo de dañosal vehículo aéreo durante las maniobras y pruebas en las técnicas de control.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 8 / 78

Un valor agregado del sistema de simulación desarrollado, es que con las modificaciones adecuadasse puede implementar una plataforma de ensayos con fines didácticos para la enseñanza de la teoría decontrol de sistemas no lineales.
Si en una fecha posterior se hace posible obtener los recursos financieros necesarios, se puedenadquirir todos los equipos y componentes indispensables para el desarrollo e implementación de unlaboratorio donde se compruebe con la experimentación la validez de los conceptos teóricos estudiados enel presente trabajo.
Para finalizar y en términos de futuro, una posible aplicación que podría ser obtenida con eldesarrollo de este trabajo de grado de maestría, es la de potenciar los sistemas de seguridad y resguardo dela UNET con un conjunto de drones con los cuales se pueda desarrollar un mejor sistema de vigilancia delcampus universitario y sus alrededores.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 9 / 78

CAPÍTULO II
2.1. Antecedentes de la investigación.
Los artefactos aéreos con cuatro, o más, rotores horizontales han sido objeto de una aceleradaevolución en los últimos años. Grupos de investigación, estudiantes de ingeniería, y aficionados en generalse encuentran trabajando para lograr la implementación de modelos y controladores más robustos, demanera tal que se pueda trabajar con simulaciones más detalladas, precisas, y por tanto más realistas en elcomportamiento de los cuatrirotores.
De las diversas revisiones se aprecia que muchos autores pensando a futuro en una implementaciónpráctica y limitada en potencia de cálculo por la impuesta ligereza en peso, optan por mantenerrelativamente simple el modelado de la dinámica del vehículo lo cual hace posible controlar al cuadrirotor utilizando técnicas de control clásico de los sistemas lineales como el PID (Proporcional + Integral +Derivativo) como se indica en los trabajos de Hoffmann et al [12], Goela et al [13], Erginer et al [14],Jategaonkar [15], Cowling et al [16], Bouabdallah et al [17], y Pounds et al [18], por medio de lalinealización de la dinámica de comportamiento del dispositivo alrededor de un punto de operación queusualmente se escoge según donde el artefacto deba rondar. Sin embargo, el vuelo de rango amplio o conmaniobras más complejas exige un mejor desempeño del sistema de control, necesidad que solo puede serlograda por la utilización de las técnicas de control no lineal, ya que estas consideran una forma másgeneral de la dinámica del vehículo en todas las zonas de vuelo, pero estas implican a su vez un modelomás completo del artefacto aéreo.
En cuanto a los métodos no lineales de control, se han realizado trabajos con técnicas como:Regulador Lineal Cuadrático (LQR, Linear Quadratic Regulator) óptimo como se indica en los trabajos deCowling et al [19], Minh et al [20], Al-Younes et al [21], y Bouabdallah [22], además de varios esquemasadaptativos y semiadaptativos como se indica en el trabajo de Mellinger et al [23], o utilizando la técnicade Control Recursivo (Backstepping) o recursividad como se muestra en los trabajos de Altug et al [24],Madani et al [25], Madani et al [26], y Bouabdallah et al [27], o control por Modo Deslizante como seindica en los trabajos de Xu et al [28], y de Lee et al [29], o de linealización por realimentación como seindica en el los trabajos de Altug et al [24], Mokhtari et al [30], y de Das et al [31], hasta los trabajos coninversión dinámica del modelo como indica Hehn et al [32], y Das et al [31]. Trabajos de los cuales seinfiere que son técnicas efectivas para el control de un cuadrotor que debe desarrollar maniobras de pilotaje.En particular, la linealización por realimentación parece mostrar expectativas muy favorables para elcontrol de vehículos aéreos del tipo cuadrirotor, ya que hay una estructura de linealización que puederepresentar la dinámica del cuadricóptero en cuanto a la orientación y la altura dentro del lazo interno, yla posición dentro del lazo externo.
En los trabajos presentados, se asumen varias formas de realimentación de los diversos sensorestransportados por la aeronave como en el caso de las unidades de medición de la inercia (IMU, InertialMeasurenment Units), las unidades medidoras de aceleraciones lineales y angulares, dispositivos infrarojosy por sonar a efecto de medir la distancia a los obstáculos en la trayectoria de vuelo, cámaras normales yde infrarrojo, y unidades de posicionamiento global (GPS, Global Positioning System) a efectos dedeterminar la ubicación espacial. De manera típica, cuando la propuesta se implementa de forma
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 10 / 78

experimental se hace utilizando la circuitería electrónica de la aeronave, y en algunos casos, se utilizainfraestructura externa al vehículo pero enlazado inalambricamente con una estación en tierra para elcontrol de la planificación o la generación de la trayectoria. Desafortunadamente, muchas de las propuestasy esquemas de control no son implementados de manera experimental y solo se suministra la justificaciónmatemática o las simulaciones con los análisis de los resultados, y cuando se llega a la implementaciónexperimental, por lo general no se establece una comparación entre lo simulado y lo obtenido en idénticascondiciones a afectos de verificación y validación del modelo.
Retornando a la idea de la manipulación matemática, todas las técnicas de control sugeridasanteriormente requieren un completo conocimiento del modelo y los parámetros del sistema, pero loserrores numéricos en los valores de los parámetros utilizados pueden conducir a un deterioro significativoen el desempeño del controlador. Además, variaciones no modeladas en los parámetros del sistema comola masa y por tanto la inercia durante las maniobras de vuelo pueden ser causa en la ocurrencia de erroressignificativos en la estabilización, para el caso de los sistemas linealizados y con técnicas de control clásico.
Por otra parte, la necesidad de un modelo no lineal preciso de la dinámica del cuadrirotor puede sersatisfecha por medio de la utilización de métodos adaptativos que puedan reaccionar ante la perturbacióny corregir los errores en las estimaciones de los parámetros del modelo por medio del ajuste de losparámetros ante situaciones adversas. En ese sentido, métodos como el Control Adaptativo por Referenciadel Modelo (Model Reference Adaptative Control, MRAC) propuesto por Whitehead et al [33] podríanser utilizados para tal fin.
Sin embargo, con respecto a muchos de los métodos de control linealizado, la trayectoria realizabledel vehículo se encuentra restringida por la misma utilización de la linealización. En el trabajo desarrolladopor Huang et al [34] se sugiere un método de control recursivo adaptativo el cual puede ser extendido paraincluir los parámetros de inercia en la ley de adaptación desarrollada por Zeng et al [35].
Trabajos recientes en la búsqueda de la autonomía operativa de un dispositivo cuadrirotor utilizaronmétodos adaptativos indirectos basados en los mínimos cuadrados para el problema de la masa del vehículocomo el propuesto por Mellinger et al [23]. Sin embargo, todos los métodos indirectos basados en lasdiferencias entre las salidas esperadas y las actuales de la planta corrigen los errores en los parámetros, perono lo hacen de manera explicita en los parámetros del modelo, como sí lo hacen los métodos adaptativosdirectos sugeridos por Craig et al [36] para los manipuladores mecánicos robóticos.
En otro orden de ideas, es importante tener presente que, el progreso en la tecnología de lossensores, los procesadores de la información, y la integración de los actuadores han hecho posible laexistencia de los robots voladores realmente pequeños. Bouabdallah et al [37] describe una posibleaproximación en el sentido de desarrollar un micro cuatrirotor para uso en interiores el cual llaman “OS4".
En otro tabajo, Bouabdallah et al [17] presentan los resultados obtenidos con la utilización delclásico controlador PID (Proporcional + Integral + Derivativo) y de un controlador cuadrático lineal (LQ,Linear Quadratic) al ser implementados en el OS4, controladores basados en un modelo mas desarrolladoal originalmente utilizado [37]. Los resultados obtenidos con el controlador cuadrático revelan que tiendea ser problemático ya que es difícil encontrar los valores de las matrices que satisfagan la condición deestabilidad del conjunto robótico. Sin embargo, la clásica aproximación del controlador PID se desempeñafavorablemente en comparación con el controlador LQ debido a la simplicidad del método escogido para
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 11 / 78

lidiar con las incertidumbres del modelo, siempre y cuando las perturbaciones por ráfagas de aire semantengan nulas o al mínimo.
En el trabajo presentado por Becker et al [38], se desarrolla una herramienta computacionaldiseñada específicamente para simular la dinámica del OS4 la cual se implementa en MATLAB por mediodel Simulink, el programa permite la prueba de respuesta de diversos sensores y filtros para las señalesgeneradas, así como varias técnicas de control. Este ambiente de simulación fue específicamente utilizado,en este caso, para probar la capacidad de evasión de obstáculos utilizando sensores por ultrasonido.Obviamente, antes de proceder a la implementación y prueba experimental en el OS4.
Con el objetivo de diseñar un helicóptero cuatrirotor práctico, Pounds et al [39] crean el “X-4 FlyerMark II” el cual es una plataforma cuatrirotor estructuralmente robusta con armazón y aviónica construidaa la medida y capacidad de carga de hasta 4 kg. Tiene la particularidad de que el diseño y construcción delas propelas es aero-elástico y se dan a conocer los resultados de desempeño de esta característica. Comotal, el cuatrirotor incluye en los rotores balanceo por resortes lo cual permite el ajuste de las característicasde batido de la pala. Efecto que también se incluye en el modelado dinámico del artefacto desarrollado enMATLAB y de cuyas simulaciones se despende que la configuración y funcionamiento inverso de laspropelas es beneficioso para el vuelo del cuadrirotor.
Este mismo equipo de investigadores presenta en trabajo posterior [40] el análisis de la dinámicaen la postura del vehículo, lo cual permite la puesta a punto del diseño mecánico para mejorar la respuestaen el rechazo a las perturbaciones y la sensibilidad al control. A efectos de control de la postura delvehículo se implementó un controlador lineal SISO (Single In Single Out, entrada simple salida simple)con el objetivo de estabilizar los modos dominantes y desacoplados de elevación (Pitch) e inclinación(Roll) cuando se utiliza un modelo de entradas perturbadas para estimar el desempeño de la planta(cuadrirotor). El modelo de la planta también implementa el batido de las palas de las propelas, resultadosque concuerdan con los valores experimentales obtenidos del “X4 Flyer” y los cuales indican que lacaracterística de batido en las palas introduce efectos estabilizadores de vuelo muy significativos en elvehículo. En general, los resultados muestran que la compensación por batido de las propelas permite elcontrol en la orientación a baja velocidad en los rotores.
Por otra parte, Mokhtari et al [41] presentan una linealización mixta por realimentación robusta concontrolador lineal GH4 aplicado a las no linealidades del cuadrirotor. La saturación de los actuadores y lasrestricciones en las salidas del espacio de estado se implementaron para analizar el escenario del peor casoen el diseño de las leyes de control. Además, el comportamiento del controlador se comprobó por mediode incertidumbres subyugadas en los parámetros, perturbaciones externas, y ruido en las mediciones de lossensores. Las simulaciones muestran que el comportamiento general del sistema viene a ser robusto cuandolos valores de ponderación de las funciones son seleccionados de manera cuidadosa.
La visión artificial también ha probado ser una herramienta provechosa para el control espacial delos cuadrirotores. Tournier et al [42] presentan la estimación y el control de un cuatrirotor basados en visiónpor medio de una cámara simple (Webcam) en relación a un vehiculo aéreo que utiliza patrones de Moiré.El propósito de esta investigación fue la adquisición de seis grados de libertad estimados, los cuales sonesenciales para la operación de vehículos aéreos que se aproximan entre sí o en la aproximación a laplataforma de aterrizaje. Los resultados de las pruebas indican que es posible la utilización de este sistemapara de manera autónoma mantener la posición flotante de acercamiento del artefacto aéreo siempre y
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 12 / 78

cuando la ubicación objetivo se mantenga dentro del campo de visión de la cámara.
Tomando en cuenta que los actuales diseños de cuadrirotores por lo general sólo considerancondiciones de operación nominales en el diseño de las estrategias de control, Hoffman et al [12] se ocupandel estudio del problema que se presenta cuando la operación del artefacto se desvía de manera significativade su punto de flotación por efecto de las perturbaciones a causa de las ráfagas de viento. En particular,investigan sobre tres efectos diferentes en la aerodinámica del cuatrirotor y su relación con la velocidad dedesplazamiento del vehículo, ángulo de ataque, y diseño de la armazón. El primer efecto estudiado fue lamanera como el empuje total varia y no solo con las variaciones en la potencia de los motores queenergizan los rotores. Se incluyo el efecto del chorro de salida del rotor con relación al ángulo de ataquede la pala con respecto a la ráfaga libre. El segundo fenómeno estudiado fue el “batido de las palas de lapropela”, que resulta de las diferentes velocidades del aire que entra o se dirige hacia la propela por efectode su rotación y que se produce por el avance y la retirada de la pala. Este fenómeno, induce momentos deinclinación (roll) y elevación (pitch) en el buje del rotor así como deflexiones en el vector de empuje. Porúltimo, el efecto de interferencia causado por los componentes que conforman el cuerpo del vehículo y quese encuentran cerca del flujo deslizado desde las propelas, el cual se investigó ya que es el principalresponsable de las inestabilidades en el empuje neto y dificultades en el seguimiento de la postura denavegación.
El alcance total de todos estos efectos aerodinámicos fueron observados en la práctica por mediodel cuatrirotor STARMAC II el cual dispone de control autónomo sobre su postura y su elevación,demostrándose en los resultados obtenidos que existen modelos matemáticos del artefacto y técnicas decontrol derivadas que son inadecuadas para un seguimiento preciso de la trayectoria pautada a unavelocidad significativa o elevada y en ambientes incontrolados.
Por otra parte, Courses et al [43], suministran un modelo matemático totalmente dinámico de uncuatrirotor comercialmente disponible al público en general y presentan su desempeño a poca altura bajoun esquema de control por modo deslizante, la cual es una técnica conocida por su robustes en mantenerel punto de operación a pesar de las perturbaciones y variaciones durante la operación. La planta fuemodelada de manera no lineal y con variables de estado fuertemente acopladas. Las presunciones hechasincluyen: dominios insaturados, perturbaciones climáticas mínimas, elementos actuadores con unavelocidad de respuesta razonablemente rápida. Las simulaciones mostraron que el algoritmo de controlpilotea el sistema de manera exitosa según la trayectoria programada con seguimiento en las señales decontrol.
Katie Miller [44] busca diseñar leyes de control para un helicóptero cuatrirotor que recorra una rutapredeterminada por medio de la definición de puntos de interés, de manera más específica, utiliza uncontrolador PD para el control de posición, y un controlador PID para el control de rotación que define lanueva dirección una vez alcanzado el punto de interés. Las leyes de control fueron desarrolladas a partirdel modelo dinámico del cuadrirotor, el cual fue obtenido por la linealización de sus ecuaciones demovimiento que son no lineales. El comportamiento de estas leyes de control fue estudiado bajo lapresencia de las incertidumbres del modelo y perturbaciones externas como las ráfagas de viento. Losresultados muestran que mientras las leyes de control por linealización son adecuadas bajo condiciones decasi nula perturbación, ante la presencia de perturbaciones ambientales el desempeño desmejora de manerasignificativa.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 13 / 78

Gjioni et al [45] diseñaron un robot cuatrirotor para la sexta competición anual de sistemas aéreosno tripulados, donde este cuatrirotor utiliza un GPS (Global Positioning System) para seguimiento de laruta y control de la altitud, también utiliza una cámara y tiene capacidad de computo gracias a que disponede un procesador dual con lo cual es capaz de navegación autónoma e intercambio de información con laestación en tierra. El control de postura se realiza por medio de cuatro controladores PID (control deelevación, inclinación, viraje, y aceleración) donde para cada caso la entonación de los controladores serealizó de manera experimental. En relación a los resultados prácticos, se debe indicar que durante lacompetición el artefacto se enfrento a fuerte turbulencia por vientos cruzados, pero los controladores sedesempeñaron excepcionalmente bien ya que fueron capaces de estabilizar al sistema mientras realizabael recorrido.
2.2. Bases Teóricas.
A continuación se indican los conceptos mínimos necesarios para la comprensión de lasformalidades matemáticas del proyecto de investigación.
2.2.1. Un poco de Historia.
La historia como tal, comienza a principios del siglo XX, cuando Charles Richet, un académico ycientífico Francés construyó un pequeño prototipo de helicóptero no tripulado [46]. Aunque este intentono fue un éxito, Louis Bréguet, un estudiante de Richet se inspiro con los ensayos de su profesor, de maneratal que para 1906 Louis y su hermano, Jacques Bréguet, comenzaron la construcción de su primercuadrirotor . Louis realizo muchas pruebas sobre el perfil de la pala para el diseño de las propelas, demanera tal que logró un conocimiento básico en los requerimientos necesarios para lograr un vuelo vertical.
En 1907 lograron finalizar la construcción de un artefacto para vuelo vertical que llamaron:Giroplano Bréguet-Richet No 1, el cual era un cuadrirotor con propelas dobles de 8.1 metros de diámetrocada una, un peso de 578 Kg (incluyendo los dos pilotos), y un solo motor de combustión interna de 50 HP(37.3 kW) que energizaba a las propelas por medio de una correa a manera de transmisión. Una de lascuriosidades de estos primeros ensayos, es que ninguno de los pilotos tenia idea de como controlar lapostura del artefacto, solo se consideraba como aspecto principal el poder realizar un despegue vertical,rondar sobre una posición particular, y luego realizar el aterrizaje vertical.
Otro pionero de la aeronáutica, el ingeniero Etienne Oemichen también experimento para 1920 condiseños que utilizaban alas rotatorias. En total, diseño seis diferentes máquinas de sustentación vertical.El primer modelo fallo en su intento de levantarse desde el suelo pero, por la determinación de Oemichen,resolvió adicionar globos rellenos de hidrogeno para suministrar al artefacto tanto estabilidad como empujeascencional. El segundo artefacto, el Oemichen No2, disponía de cuatro rotores y ocho propelas soportadaspor una armazón de tubos de acero en forma de cruz. Cinco de las propelas eran para elevar y estabilizaral artefacto, una propela para la dirección, y dos propelas para la propulsión de avance.
Aunque muy rudimentaria, esta máquina lograba un considerable grado de estabilidad ycontrolabilidad de manera tal que para mediados del 20 hizo más de mil vuelos de prueba sin mayoresinconvenientes. Fue el primer artefacto que se mantuvo varios minutos en el aire sin apoyo alguno de tierra,
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 14 / 78

y para el 14 de Mayo esta máquina se aerotransportó por 14 minutos y realizo un recorrido de mas de 1600metros.
Como era de esperarse, el Ejercito Norteamericano tomo interés en las máquinas de ascensovertical, de manera tal que para 1921 contrataron al Dr. George de Bothezat e Ivan Jerome para desarrollarun dispositivo ha ser utilizado por los Cuerpos Aereos del Ejercito de los Estados Unidos (US Army AirCorps). El resultado fue una estructura de 1678 kg con brazos de 9 metros y cuatro rotores con propelasde seis palas de 8.1 metros de diámetro. Una de las condiciones del contrato del ejercito requería que elartefacto construido pudiere rondar a una altura de 100 metros, pero la mayor altura lograda por eldispositivo fue de solamente 5 metros. Al final del proyecto Bothezat demostró que el vehículo podría sermuy estable, sin embargo, múltiples problemas técnicos propios de la tecnología disponible a la fechadieron al traste con la continuidad del proyecto.
Muy posteriormente, en 1956, se construyó un prototipo de helicóptero cuadrirotor al que llamaron“Convertawings Modelo A”. Véase la Figura 1. El cual fue diseñado tanto para aplicaciones civiles comomilitares. Como tal, se controlaba por la variación del empuje de los diferentes rotores y que si bien fuetodo un éxito para la época en cuanto al despegue y aterrizaje vertical, tenia el inconveniente de que todaslas maniobras debían realizarse con vuelo frontal, lo cual no era una limitante significativa por laposibilidad de maniobrar en estacionario. El proyecto fue abandonado principalmente por la falta dedemanda para este vehículo.
De esa fecha a la actualidad es mucho el desarrollo que se ha logrado con helicópteros de una solapropela y rotor de cola, sin embargo, recientemente se ha incrementado el interés en el diseño de loscuadrirotores gracias, por una parte, a la disponibilidad de drones de muy bajo costo, y por la otra, elinterés de las grandes companías aeronáuticas en la construcción de artefactos con dos o mas propelasgracias a la disponibilidad de mayor empuje para el transporte voluminoso y pesado de personal o equipo.
En ese sentido, Bell Aircraft Corporation se encuentra trabajando en un cuadrirotor de propelainclinable que supere en versatilidad al Bell-Boeing V-22 Osprey. Véase la Figura 2. Que sea capaz detransportar de manera normal gran carga, que alcance alta velocidad, y pueda realizar tanto despegues comoaterrizajes en una pista mínima de no poderlos hacer de manera vertical (VTOL, Vertical Take-Off and
Figura 1 Cuadricóptero Convertawings Modelo A.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 15 / 78
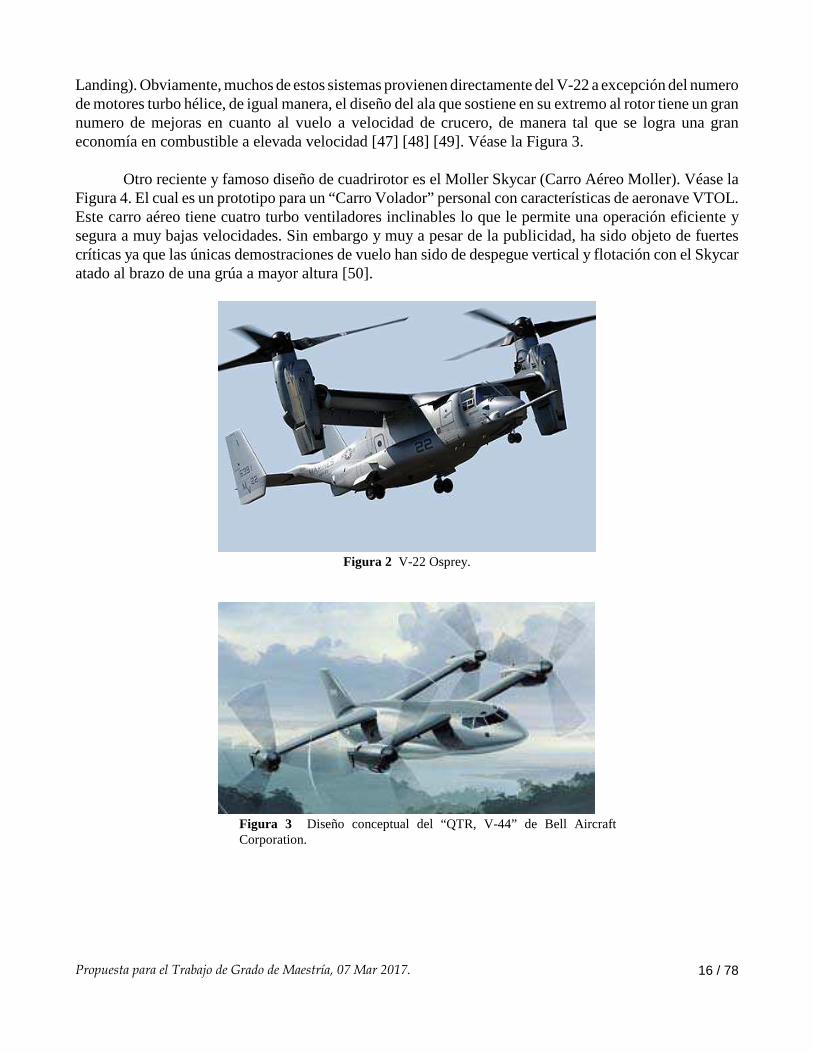
Landing). Obviamente, muchos de estos sistemas provienen directamente del V-22 a excepción del numerode motores turbo hélice, de igual manera, el diseño del ala que sostiene en su extremo al rotor tiene un grannumero de mejoras en cuanto al vuelo a velocidad de crucero, de manera tal que se logra una graneconomía en combustible a elevada velocidad [47] [48] [49]. Véase la Figura 3.
Otro reciente y famoso diseño de cuadrirotor es el Moller Skycar (Carro Aéreo Moller). Véase laFigura 4. El cual es un prototipo para un “Carro Volador” personal con características de aeronave VTOL.Este carro aéreo tiene cuatro turbo ventiladores inclinables lo que le permite una operación eficiente ysegura a muy bajas velocidades. Sin embargo y muy a pesar de la publicidad, ha sido objeto de fuertescríticas ya que las únicas demostraciones de vuelo han sido de despegue vertical y flotación con el Skycaratado al brazo de una grúa a mayor altura [50].
Figura 2 V-22 Osprey.
Figura 3 Diseño conceptual del “QTR, V-44” de Bell AircraftCorporation.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 16 / 78

El inventor del Skycar, Paul Moller ha tratado de vender en subasta este vehículo sin éxito alguno.Razón por la cual actualmente ha enfocado su trabajo en el precursor del Skycar, el “Volantor M200G”,un aerodeslizador tipo platillo volador en el que su ultima variante utiliza ocho turbo ventiladorescontrolados por computadora y es capaz de rondar o flotar hasta tres metros sobre el suelo, véase la Figura5. Esta limitación en la altura máxima es impuesta en los sistemas de control de la computadora debido alas regulaciones de la Administración Federal de la Aviación de los EEUU (FAA, Federal AviationAdministration) las cuales establecen que cualquier artefacto que vuele a más de 3 metros sobre el suelose encuentra bajo las leyes que regulan a los aeroplanos [51].
2.2.2. Principios de operación del cuadrirotor.
En un cuatrirotor, cada rotor y su propela asociada es responsable de cierta cantidad de empuje enel eje vertical (uz, Figura 6) y par torsor sobre su centro de rotación en el plano horizontal de ubicación(plano ux, uy, Figura 6), así como de cierta fuerza de arrastre opuesta a la dirección de vuelo por los efectos
Figura 4 El Moller Skycar durante una prueba de despegue.
Figura 5 Moller Volantor M200X.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 17 / 78

de la velocidad de desplazamiento sobre el perfil aerodinámico.
En cuanto a las cuatro propelas, asociadas a cada rotor, estas no son todas iguales. De hecho, estasse dividen en dos pares, dos que empujan por girar a derechas y dos que halan por rotar a izquierdas, esdecir, un par rota y el otro par contrarrota. Como consecuencia, el torque resultante en el plano horizontalde ubicación puede ser nulo si todas las propelas giran con idéntica velocidad angular, lo cual le permitea este tipo de vehículo aéreo permanecer en la misma posición y sobre su centro de gravedad. Véase laFigura 6.
Con el objeto de determinar, la orientación o postura del aeroplano en torno a su centro de masa,los ingenieros aeroespaciales usualmente definen tres parámetros dinámicos identificados como losángulos: Viraje (Yaw), Cabeceo o Elevación (Pitch), y Rotación o Inclinación (Roll), los cuales se muestranen la Figura 6 siguiendo la regla de la mano derecha para la definición de los ejes. Estos parámetros queson muy útiles ya que las fuerzas utilizadas para controlar el aeroplano actúan sobre el centro de masa demanera tal que al encontrarse el vehículo elevado este describe virajes, elevaciones, e inclinaciones.
En cuanto al cuadrirotor, según se aprecia en la Figura 7, los cambios en el valor del ángulo deelevación se logran por la variación en la velocidad de rotación entre las propelas 1 y 3, manteniendoconstante la velocidad de las propelas 2 y 4, lo cual resulta en la traslación hacia atrás, Figura 7a, o haciaadelante, Figura 7b.
Figura 6 Ángulos de rotación del Cuadrotor.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 18 / 78

Si se hace lo mismo con la velocidad de rotación de las propelas 2 y 4, manteniendo constante lavelocidad de las propelas 1 y 3, se logra el cambio en el ángulo de inclinación lo cual resulta en unmovimiento de traslación hacia la izquierda, Figura 7c, y la derecha, Figura 7d.
Si se incrementa de igual manera la velocidad de rotación de las cuatro propelas, Figura 7e, elartefacto asciende por el incremento en el empuje, y si se disminuye por igual la velocidad de rotación delas cuatro propelas, Figura 7f, el artefacto desciende por la reducción en el empuje neto.
Por otra parte, los cambios en el ángulo de viraje se logran por medio del desequilibrio en el balancede los torques aerodinámicos, es decir, se incrementa en la misma proporción la velocidad de rotación delas propelas 1 y 3 mientras se reduce en la misma proporción la velocidad de las propelas 2 y 4, Figura 7g,si bien se mantiene constante el empuje ascensional se logra el viraje a la izquierda.
En esa misma idea, si se incrementa en la misma proporción la velocidad de rotación de las propelas2 y 4 mientras se reduce en la misma proporción la velocidad de las propelas 1 y 3, Figura 7h, el dispositivoflota en la horizontal pero ahora vira a la derecha.
Por lo tanto, el cambio en cualquiera de estos tres ángulos ya sea de manera individual o enconjunto, hace posible que el cuadrirotor pueda realizar maniobras en cualquier dirección.
Como se puede inferir al observar la Figura 7 en su conjunto, los helicópteros cuatrirotor no
Figura 7 Algunas acciones para movimiento simple del Cuadrirotor.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 19 / 78

requieren rotor de cola ni requieren control en el ángulo de ataque de las palas de los rotores para eldesarrollo de maniobras aéreas, ya que esta funcionalidad de controlar de manera independiente lavelocidad de rotación de cada una de las hélices, aparte de incrementar o decrementar el empuje vertical,permite cambiar el par de torsión aplicado sobre el cuerpo principal, con lo cual se elimina la necesidadde un par de torsión adicional para controlar los virajes.
Esta característica de utilizar cuatro o más, rotores independientes permite la existencia de algunasventajas de importancia como: decremento en la complejidad mecánica; incremento en la robustez delbastidor principal; simplificar de alguna manera el modelado del rotor, si se asume que la fuerza de empujeejercida por cada rotor y su vector de par de torsión tiene una orientación efectivamente constante conrespecto al fuselaje del vehículo e ignorando, por supuesto, el efecto aerodinámico del batido de las palasdel rotor.
Además, la existencia de dos o más rotores posibilita la utilización de la potencia disponible parael ascenso o levantamiento, lo cual permite que el peso de la carga útil sea significativo en relación con elpeso del vehículo. Esto último hace que esta clase de vehículos sean plataformas ideales para aplicacionesen las que se utilicen cámaras de video, instrumentos sensores, transporte de materiales y herramientas, enaplicaciones de vigilancia autónoma, exploración de espacios relativamente abiertos o zonas peligrosas.
2.2.3. Sistema de coordenadas.
Cuando un cuadricóptero está navegando por un espacio tridimensional lo hace en dos sistemas decoordenadas diferentes. Uno de estos sistemas es el de coordenadas del vehículo, con supra indice “B”, queestá afectado por el empuje desarrollado por los rotores. El otro, es el marco de navegación con subíndice“E”, donde fuerzas como la gravitacional tienen representación en su influencia.
En ese sentido, para poder desarrollar el modelo matemático del cuadricóptero se haceimprescindible definir primero los sistemas de coordenadas con los cuales se pueda describir losmovimientos del vehículo aéreo. Estos dos sistemas según Beard [52] son:
1. Sistema de coordenadas inercial o de navegación (fijado en la tierra, FE).2. Sistema de coordenadas móvil o del cuerpo (fijado en el vehículo, FB).
Donde algunas propiedades físicas del cuadricóptero como: inclinación, elevación, viraje, velocidadangular pueden ser son medidas en FE, mientras que otras propiedades como la aceleración lineal puedeser cuantificada en FB.
FE es el sistema inercial de coordenadas de navegación y es el punto de referencia para el artefacto.Este sistema de coordenadas de referencia puede ser colocado donde sea conveniente, pero una vezestablecido debe quedar fijo en cuanto el cuadrirotor comienza a moverse. Una de las consideraciones parael sistema de coordenadas de referencia es que se ignora la curvatura de la tierra. Es decir, el sistema dereferencia se ubica sobre un plano, y el cuadricóptero tiene sobre este plano un área de proyección limitadapara navegar en el espacio, donde esta asunción no afecta ningún resultado posible.
Como tal, FE se rige por la regla de la mano derecha tanto en la definición de los ejes como en el
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 20 / 78
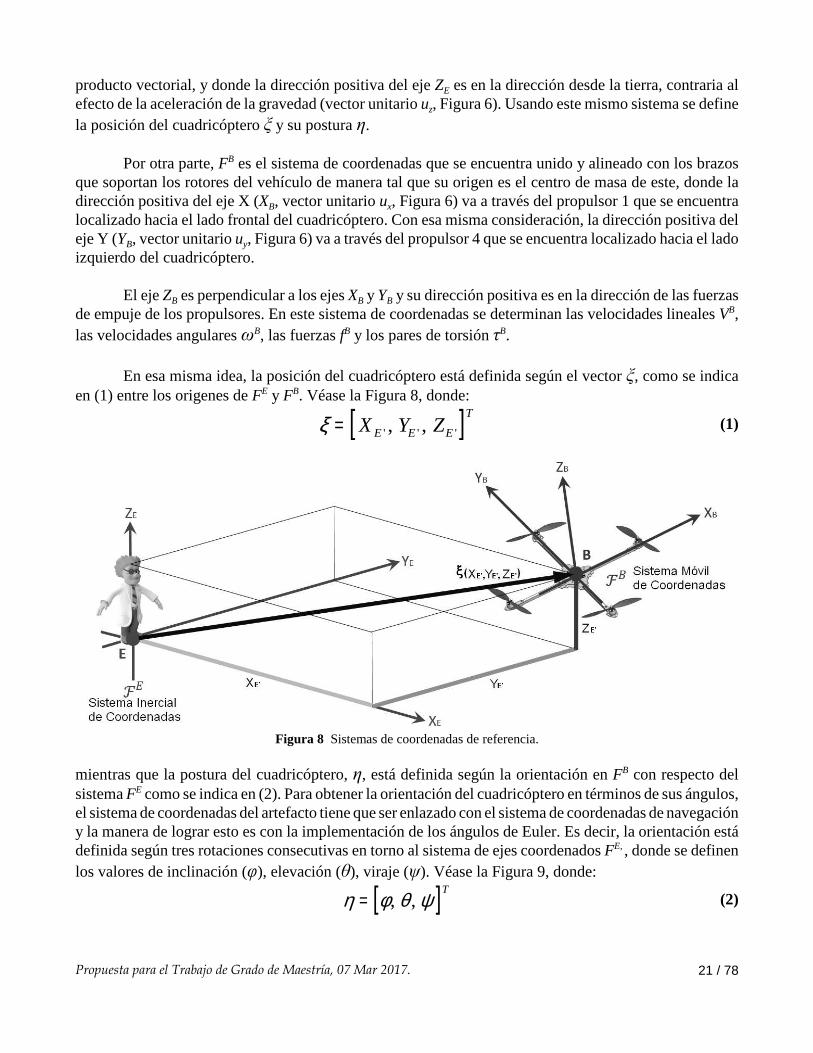
producto vectorial, y donde la dirección positiva del eje ZE es en la dirección desde la tierra, contraria alefecto de la aceleración de la gravedad (vector unitario uz, Figura 6). Usando este mismo sistema se definela posición del cuadricóptero ξ y su postura η.
Por otra parte, FB es el sistema de coordenadas que se encuentra unido y alineado con los brazosque soportan los rotores del vehículo de manera tal que su origen es el centro de masa de este, donde ladirección positiva del eje X (XB, vector unitario ux, Figura 6) va a través del propulsor 1 que se encuentralocalizado hacia el lado frontal del cuadricóptero. Con esa misma consideración, la dirección positiva deleje Y (YB, vector unitario uy, Figura 6) va a través del propulsor 4 que se encuentra localizado hacia el ladoizquierdo del cuadricóptero.
El eje ZB es perpendicular a los ejes XB y YB y su dirección positiva es en la dirección de las fuerzasde empuje de los propulsores. En este sistema de coordenadas se determinan las velocidades lineales VB,las velocidades angulares ωB, las fuerzas fB y los pares de torsión τB.
En esa misma idea, la posición del cuadricóptero está definida según el vector ξ, como se indicaen (1) entre los origenes de FE y FB. Véase la Figura 8, donde:
mientras que la postura del cuadricóptero, η, está definida según la orientación en FB con respecto delsistema FE como se indica en (2). Para obtener la orientación del cuadricóptero en términos de sus ángulos,el sistema de coordenadas del artefacto tiene que ser enlazado con el sistema de coordenadas de navegacióny la manera de lograr esto es con la implementación de los ángulos de Euler. Es decir, la orientación estádefinida según tres rotaciones consecutivas en torno al sistema de ejes coordenados FE, , donde se definenlos valores de inclinación (φ), elevación (θ), viraje (ψ). Véase la Figura 9, donde:
[ ]ξ = X Y ZE E E
T
' ' ', , (1)
Figura 8 Sistemas de coordenadas de referencia.
[ ]η φ θ ψ= , ,T
(2)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 21 / 78

En cuanto a las ecuaciones de movimiento del vehículo, es más adecuado formularlas en el sistemadefinido por FB por diversas razones, entre ellas: la matriz de inercia del sistema es invariante en el tiempo,las ecuaciones de sistema se simplifican a causa de la simetría en la armazón del cuadricóptero, lasmediciones de la sensórica son fácilmente convertibles al sistema de coordenadas de referencia FB, con locual se simplifican las variables en las ecuaciones de control.
2.2.4. Ángulos de Euler.
Los ángulos de Euler son tres ángulos introducidos por Leonard Euler para describir la orientaciónde un cuerpo rígido en el espacio con respecto a un punto de referencia en ese mismo espacio. De manerageneral, para describir la orientación de un objeto en un espacio Euclidiano se requieren tres parámetrosZ Y X, los cuales pueden ser dados de diversas maneras aunque en aviónica se prefieren los ángulos deEuler [53]. Véase la Figura 9.
Estos, también pueden ser utilizados para describir la orientación de un marco o sistema decoordenadas de referencia, relativo a otro y su transformación en las coordenadas de un punto en un marcoA en las coordenadas del mismo punto espacial en otro marco de referencia, B. Los ángulos de Euler se
denotan típicamente como: , , .] ]φ π π∈ − , θπ π
∈−
2 2, ] ]ψ π π∈ − ,
Un aspecto muy importante de los ángulos de Euler es que representan una secuencia de tresrotaciones elementales sobre ejes distintos, de manera tal que cualquier orientación puede ser obtenida porla composición de estas tres rotaciones elementales, como se indica en (3), (4), y (5). Obviamente, estasrotaciones inician en una orientación comúnmente conocida, indicandose a continuación cada una de lasmatrices de rotación [54].
Figura 9 Ejes de rotación de cualquier aeronave.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 22 / 78

( ) ( ) ( )( ) ( )
Rx φ φ φφ φ
= −
1 0 0
0
0
cos
cos
sen
sen
(3)
De manera tal que las coordenadas inerciales de posición y las coordenadas de referencia del cuerpose encuentran relacionadas por la matriz de rotación tridimensional, que es lo equivalente a lamultiplicación de las matrices de rotación de cada eje como se indica en (6) y en (7).
Donde la matriz indicada en (7) describe la rotación experimentada por el sistema de referencia delcuerpo reflejado en el sistema inercial de referencia, como se muestra en la figura 10.
( )( ) ( )
( ) ( )Ry θ
θ θ
θ θ=
−
cos
cos
0
0 1 0
0
sen
sen
(4)
( )( ) ( )( ) ( )Rz ψψ ψψ ψ=
−
cos
cos
sen
sen
0
0
0 0 1
(5)
( ) ( ) ( ) ( )R R R R RBE
xyz x y z= = ⋅ ⋅φ θ ψ φ θ ψ, , (6)
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )RB
E =− ++ −
−
cos cos
cos
θ ψ φ θ ψ φ ψ φ θ ψ φ ψθ ψ φ θ ψ φ ψ φ θ ψ φ ψ
θ φ θ φ θ
sen sen cos cos sen cos sen cos sen sen
sen sen sen sen cos cos cos sen sen sen cos
sen sen cos cos cos
(7)
Figura 10 Rotación según los ángulos de Euler.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 23 / 78

Como se indica en (7), esta matriz proporciona la conversión desde el cuadricóptero al marco denavegación. Aunque también puede ser necesario en algunos casos realizar la transformación desde elmarco de navegación al marco del vehículo, lo cual puede ser logrado sin mayor problema al realizar latransposición de la matriz de rotación definida en (7) como se indica en (8) y en (9).
2.2.5. Teoría de control moderno.
La tendencia moderna en los sistemas de ingeniería es hacia una mayor complejidad, debido sobretodo a que se requieren tareas más complejas y buena precisión [55]. Los sistemas complejos pueden tenermúltiples entradas y múltiples salidas y pueden ser variantes en el tiempo.
Debido a la necesidad de cumplir requisitos cada vez más exigentes en el comportamiento de lossistemas de control, el aumento en la complejidad del sistema, y el fácil acceso a programas y computadoras con elevada capacidad de cálculo, aparte de los sistemas de adquisición de datos, la teoríamoderna de control, que es una nueva aproximación al análisis y diseño de los sistemas de controlcomplejo, ha tenido desarrollo y aplicabilidad desde los años 60. Esta nueva aproximación se basa en elconcepto de estado, el cual como tal y por sí mismo no es nuevo, puesto que ha existido durante bastantetiempo en el área de la dinámica clásica y en otros campos.
2.2.5.1. Teoría de control moderno frente a la teoría de control clásico.
La teoría de control moderno contrasta con la teoría de control convencional en que su formulaciónes aplicable a sistemas de múltiples-entradas, múltiples-salidas, que pueden ser lineales o no lineales,invariables en el tiempo o variables en el tiempo, mientras que la teoría clásica sólo es aplicable a sistemasde una entrada-una salida invariantes en el tiempo. Además, la teoría de control moderna es esencialmenteuna aproximación en el dominio temporal, mientras que la teoría de control clásica es una aproximaciónen el dominio de la frecuencia compleja. Tomando en cuenta que para el control del cuadricóptero sepropone un Regulador Lineal Cuadrático (LQR) que pertenece al dominio de la teoría de control moderno,se hace necesario definir conceptos como: estado, variables de estado, vector de estado, y espacio deestados, que se describen a continuación.
2.2.5.2. Estado.
El estado de un sistema dinámico es el conjunto de variables más pequeño (llamadas variables deestado), de forma que el conocimiento de estas variables en t = t0, junto con el conocimiento de la entradapara t$t0, determinan completamente el comportamiento del sistema en cualquier t$t0.
[ ]R REB
BE T
= (8)
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
REB =
−− +
+ −
cos cos cos
cos cos cos cos cos
cos cos cos cos cos cos
θ ψ θ ψ θφ θ ψ φ ψ φ ψ φ θ ψ φ θφ ψ φ θ ψ φ θ ψ φ ψ φ θ
sen sen
sen sen sen sen sen sen sen
sen sen sen sen sen sen
(9)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 24 / 78

Obsérvese que el concepto de estado no está limitado a sistemas físicos. Es aplicable a sistemasbiológicos, sistemas económicos, sistemas sociales y muchos otros.
2.2.5.3. Variables de estado.
Las variables de un sistema dinámico son las variables que constituyen el menor conjunto devariables que determinan el estado del sistema dinámico. Si al menos se necesitan n variables x1, x2, ..., xnpara describir completamente el comportamiento de un sistema dinámico (de forma que una vez que laentrada para t$t0 está dada y el estado inicial en t = t0 está especificado, el estado futuro del sistema estádeterminado completamente), entonces tales n variables son un conjunto de variables de estado.
Obsérvese que las variables de estado no necesitan ser físicamente medibles o cantidadesobservables. Se pueden seleccionar como variables de estado que no representan cantidades físicas yaquellas que no son medibles ni observables. Tal libertad en la elección de las variables de estado es unaventaja de los métodos en el espacio de estados. Sin embargo, desde el punto de vista práctico esconveniente seleccionar para las variables de estado cantidades físicamente medibles, de ser posible, porquelas leyes de control óptimo requerirán realimentar todas las variables de estado con una ponderaciónadecuada.
2.2.5.4. Vector de estado.
Si se necesitan n variables de estado para describir completamente el comportamiento de un sistemadado, entonces esas n variables de estado se pueden considerar como las n componentes de un vector x.Este vector se denomina vector de estado. Un vector de estado es, por lo tanto, un vector que determinaunívocamente el estado del sistema x(t) en cualquier instante del tiempo t$t0, una vez que se conoce elestado en t = t0 y se especifica la entrada u(t) para t$t0.
2.2.5.5. Espacio de estados.
El espacio n-dimensional cuyos ejes de coordenadas están formados por el eje x1, eje x2, ..., eje xn,donde x1, x2, ..., xn son las variables de estado, se denomina espacio de estados. Cualquier estado se puederepresentar como un punto en el espacio de estados.
2.2.5.6. Ecuaciones en el espacio de estados.
En el análisis en el espacio de estados se centra la atención en los tres tipos de variables queaparecen en el modelado de los sistemas dinámicos; las variables de entrada, las variables de salida y lasvariables de estado. Donde la representación en el espacio de estados de un sistema dado no es única, salvoque el número de variables de estado sea el mismo para cualquier representación en variables de estado deun sistema cualquiera.
El sistema dinámico debe contener elementos que recuerden los valores de la entrada para t$t1.Puesto que los integradores en un sistema de control en tiempo continuo sirven como dispositivo dememoria, las salidas de tales integradores se pueden considerar como las variables que describen el estadointerno del sistema dinámico. Así las salidas de los integradores sirven como variables de estado. Elnúmero de variables de estado para definir completamente la dinámica del sistema es igual al número de
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 25 / 78

integradores que aparezcan en el mismo.
Sea un sistema de múltiples entradas y de múltiples salidas con n integradores. Supóngase tambiénque hay r entradas u1(t), u2(t), ..., ur(t) y m salidas y1(t), y2(t), ..., ym(t). Se definen las n salidas de losintegradores como variables de estado: x1(t), x2(t), ..., xn(t). Entonces el sistema se puede describir medianteel conjunto de ecuaciones indicado en (10) para las entradas, y en (11) para las salidas.
En cuanto a las salidas y1(t), y2(t), ..., ym(t) del sistema se obtienen mediante el conjunto deecuaciones indicado en (11).
Si ahora se expresan los conjunto de ecuaciones indicados en (10) y en (11) como vectores ymatrices, se tiene el sistema indicado en (12), (13), y (14).
( ) ( )( ) ( )
( ) ( )
& , , ..., ; , , ..., ;
& , , ..., ; , , ..., ;
& , , ..., ; , , ..., ;
x t f x x x u u u t
x t f x x x u u u t
x t f x x x u u u t
n r
n r
n n n r
1 1 1 2 1 2
2 2 1 2 1 2
1 2 1 2
==
=M
(10)
( ) ( )( ) ( )
( ) ( )
y t g x x x u u u t
y t g x x x u u u t
y t g x x x u u u t
n r
n r
m n n r
1 1 1 2 1 2
2 2 1 2 1 2
1 2 1 2
==
=
, , ..., ; , , ..., ;
, , ..., ; , , ..., ;
, , ..., ; , , ..., ;
M(11)
( )
( )( )
( )
( )
( )( )
( )
( )
( )( )
( )
&
&
&
&
, ,x y ut
x t
x t
x t
t
y t
y t
y t
t
u t
u t
u tn m r
=
=
=
1
2
1
2
1
2
M M M(12)
( )( )( )
( )f x u, ,
, , , ; , , , ;
, , , ; , , , ;
, , , ; , , , ;
t
f x x x u u u t
f x x x u u u t
f x x x u u u t
n r
n r
n n r
=
1 1 2 1 2
2 1 2 1 2
1 2 1 2
K K
K K
M
K K
(13)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 26 / 78

Los cuales por simplicidad pueden ser expresadas en las ecuaciones (15) y (16).
Donde la ecuación (15) es la ecuación de estado y la ecuación (16) es la ecuación de la salida. Silas funciones vectoriales f y/o g involucran explícitamente el tiempo t, el sistema se denomina: SistemaVariante con el Tiempo.
Si se sabe que el sistema se desvia poco o muy poco del punto de operación, las ecuaciones (15)y (16) pueden ser linealizadas, obteniendose la ecuación de estado (17) y la ecuación de salida (18).
Donde A(t) se denomina matriz de estado, B(t) matriz de entrada, C(t) matriz de salida, y D(t)matriz de transmisión directa. En la Figura 11 se muestra un diagrama de bloques en el que se representangráficamente las relaciones de las ecuaciones (17) y (18).
Si las funciones vectoriales f y g no involucran a la variable tiempo, t, de manera explicita, elsistema se denomina invariante con el tiempo, con lo cual las ecuaciones (17) y (18) se simplifican segúnlo indicado en las ecuaciones (19) y (20).
( )( )( )
( )g x u, ,
, , , ; , , , ;
, , , ; , , , ;
, , , ; , , , ;
t
g x x x u u u t
g x x x u u u t
g x x x u u u t
n r
n r
m n r
=
1 1 2 1 2
2 1 2 1 2
1 2 1 2
K K
K K
M
K K
(14)
( ) ( )& , ,x t t= f x u (15)
( ) ( )y g x ut t= , , (16)
( ) ( ) ( ) ( )& ( )x A x B ut t t t t= + (17)
( ) ( ) ( ) ( ) ( )y C x D ut t t t t= + (18)
Figura 11 Diagrama de bloques del sistema de espacio de estado linealizado
( ) ( ) ( )&x Ax But t t= + (19)
( ) ( ) ( )y Cx Dut t t= + (20)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 27 / 78

2.2.6. Introducción al Control Óptimo.
En la teoría de control moderno, el método de diseño combinando un observador y realimentaciónde estados ha sido una herramienta fundamental en el control de sistemas en variable de estados. Sinembargo, no siempre es el método más útil a causa de las siguientes tres dificultades [56]:
1. La traducción de especificaciones de diseño a ubicación de polos no es directa,especialmente en sistemas complejos; ¿Cuál es la mejor configuración de polos paraespecificaciones dadas?.
2. Las ganancias de realimentación en sistemas MIMO no son únicas; ¿Cuál es la mejorganancia para una configuración de polos dada?.
3. Los autovalores del observador deben elegirse más rápidos que los del controlador, pero,¿Qué criterio adicional se debe utilizar para preferir una configuración a otra?.
Las respuestas a las preguntas anteriores son las que implican el desarrollo del Control Óptimo, lacual es una técnica matemática que utiliza las variables de estado que describen al proceso para resolverproblemas de optimización en sistemas que evolucionan en el tiempo y que son susceptibles de serinfluenciados por fuerzas externas. Estos sistemas variables en el tiempo son tan diversos que van desdeel cuerpo humano, pasando por los sistemas económicos, hasta llegar a los sistemas planetarios.
Como tal, la técnica se basa en la elección las ganancias de realimentación de estados y delobservador de forma que minimicen un criterio de optimización dado. Una vez que el problema ha sidoresuelto el control óptimo nos da una senda de comportamiento para las variables de control, es decir, nosindica qué acciones se deben seguir para poder llevar a la totalidad del sistema de un estado inicial a unofinal de forma óptima.
El criterio particular de optimización o función de costo, es un funcional cuadrático del estado yla entrada de control como se indica en la ecuación (21).
donde Q y R son matrices constantes (aunque no necesariamente) semi definida y definida positivasrespectivamente.
El control que se obtiene de minimizar este criterio es lineal. Como el criterio se basa en funcionalescuadráticos, el método se conoce como lineal-cuadrático (LQ: Linear-Quadratic), del que se obtiene elregulador lineal cuadrático (LQR, Linear-Quadratic-Regulator).
Para el diseño de observadores se siguen criterios similares de optimización, sólo que el funcionaldependerá en esta caso del error de estimación, y se basa en una caracterización estadística de los ruidosque afectan al sistema, generalmente ruido blanco o gaussiano por la caracterización estadística del ruidoempleada, donde este estimador óptimo lineal-cuadrático se conoce más comúnmente como el filtro de
( ) ( )( ) ( ) ( ) ( ) ( )[ ]J x t u t x x u u dT T
t
T
, = +∫ τ τ τ τ τQ R (21)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 28 / 78

Kalman. Cuando se combinan la ganancia de realimentación de estados LQ con el filtro de Kalman,obtenemos lo que se conoce como un Controlador Lineal Cuadrático gaussiano (LQR).
2.2.6.1. El principio de optimalidad.
Para facilitar el entendimiento del criterio de optimización en variable de estados, se recurrirá a unaforma muy simple de la teoría de grafos en la que los nodos son el estado del sistema y las trayectorias quelos conectan son las transiciones de un estado a otro bajo el efecto de una entrada al sistema. Véase laFigura 12.
Cuando se asocia un criterio de optimización al sistema, cada transición entre estados tiene asociadoun costo o penalidad. Por ejemplo, el costo bien podría ser la distancia entre estados de manera tal quedesde el punto de vista práctico pueden penalizarse las transiciones que se alejan demasiado del estado finaldeseado, o que realizan un recorrido excesivo, o acciones de control de valor muy elevado. A medida queel sistema evoluciona de estado en estado, los costos se suman hasta acumular un costo total asociado a latrayectoria desde el estado origen al estado final.
Este concepto puede apreciarse mejor con el diagrama de la Figura 12, que representa 8 estados deun sistema con sus transiciones posibles. El estado inicial es el 1, y el final el 8. El sistema pasa de unestado a otro en cada tiempo k determinado por la entrada u[k] y las ecuaciones x[k+1]=Ax[k]+Bu[k] , quees una forma discreta de la ecuación (19).
Las transiciones posibles se representan por los arcos que conectan el estado inicial al final a travésde los estados intermedios. El costo asociado a cada transición se representa con la letra J; por ejemplo, elcosto de moverse del estado 3 al 5 es J35.
Asumiendo que los costos se acumulan en forma aditiva, vemos que la trayectoria marcada en rojo,por ejemplo, tiene un costo total J13 + J35 + J56 +J68.
Como hay varias rutas alternativas del estado 1 al 8, el costo total dependerá de la trayectoriaelegida. La señal de control u[k] que determina la trayectoria de menor costo es la estrategia óptima. Encuanto a los sistemas en tiempo continuo, la acumulación de costos se representa mediante integración, envez de la suma propia de los sistemas discretos.
Es fundamental establecer que la herramienta matemática utilizada para determinar la estrategiaóptima es: El principio de optimalidad de Bellman, el cual se enuncia de la siguiente manera:
Figura 12 Posibles trayectorias del estado 1 al 8.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 29 / 78

En cualquier punto intermedio xi en una trayectoria óptima entre x0
y xf, la estrategia desde xi al punto final xf debe ser en sí unaestrategia óptima.
Aunque pueda parecer muy obvio, este principio permite resolver en forma cerrada los problemasde control óptimo, aparte de que en la práctica también se utiliza usa el cómputo recursivo de las solucionesóptimas en un procedimiento llamado: programación dinámica.
2.2.6.2. Control LQ en tiempo continuo.
La deducción del control óptimo LQ para el sistema en tiempo continuo inicia con lo establecidoen la ecuación (19), donde las “transiciones” se reducen a “incrementos” infinitesimales, con lo cual laecuación de costo se manifiesta ahora como se indica en la ecuación (22).
Si se considera que los incrementos tienden a cero, se obtienen las ecuaciones (23), (24), y (25) lascuales definen el control óptimo LQ según lo indicado por Bay [57].
La ecuación (25) es la ecuación diferencial matricial de Riccati, que debe resolverse hacia atrás en
el tiempo con condiciones “iniciales” , y las siguientes consideraciones:( )P t Sf =
1. El control óptimo LQ es una realimentación lineal de estados, aunque inestacionaria.
2. Los “transitorios” en y ocurrirán sobre el final del intervalo .( )P t ( )K t [ ]t t f0,
En cualquier caso, la ecuación diferencial (25) es en general de difícil solución, aún por métodosnuméricos ya que: ¿Cómo pueden guardarse los casi infinitos valores de P(t) calculados en tiempo invertidopara ser aplicados luego al sistema?. Esta dificultad lleva a buscar una solución óptima estacionaria,
, que surge de considerar el caso de horizonte infinito: .( )K t K= t f → ∞
Para finalizar, se indica que la condición de optimalidad no garantiza automáticamente buenaspropiedades de solidez o robustez [58]. En tal sentido, la estabilidad del sistema de lazo cerrado debe serrevisada por separado después del diseño e implementación del controlador LQR, ya que el tratar depromover robustez en algunos de los parámetros del sistema puede suponer condiciones estocásticas en
( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( )( )J x t u t t x t S x t x t x t u t u t dtTf f
T
t
t f
0 0 0
1
2
1
20
, , = + +∫ Q R (22)
( ) ( ) ( )u t K t x t* = − (23)
( ) ( ) ( )K t B P t x tT= −R 1 (24)
( ) ( ) ( ) ( ) ( )&P t P t B B P t P t A A P tT T= − − −−R Q1 (25)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 30 / 78

lugar de determinísticas. La condición anterior se puede interpretar como que la diferencia entre doscontroladores en el cual sólo uno de ellos es óptimo, se deba a que únicamente algunos parámetros delcontrolador sean diferentes [59].
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 31 / 78

CAPÍTULO III
3.1. Modelo de la investigación.
La investigación científica tiene como fundamento la necesidad de que el hecho o hechosestudiados, las relaciones que surjan entre ellos, así como la obtención de resultados y evidencias queprovengan del problema de la investigación reúnan una serie de características como fiabilidad, objetividady validez [60]. Por tal razón, para lograr proporcionar una respuesta al problema de la investigación sedeben delimitar los procedimientos de orden metodológico que se llevaran a cabo [61].
De acuerdo con el problema planteado y en función de sus objetivos, esta investigación sefundamenta en el enfoque cuantitativo, caracterizado por representar la expresión completa que simbolizauna realidad por medio del uso de hipótesis sujeta a la verificación empírica y la aplicación del métodohipotético deductivo, apoyado en el análisis racional y lógico que se representa en los diseñosexperimentales. En la presente investigación el objeto de estudio es externo al sujeto que lo investiga,tratando de lograr la máxima objetividad.
3.2. Nivel de la investigación.
Según el propósito que persigue la investigación, el estudio es de carácter aplicado. En ese sentido,Padrón [62], menciona que la investigación aplicada se refiere a aquel tipo de estudio científico orientadoa resolver problemas o a controlar situaciones prácticas. Dentro de esa concepción general, puededistinguirse: aquella que solo considera estudios que explotan teorías científicas previamente validadas parala solución de problemas prácticos y el control de situaciones de la vida cotidiana. En este sentido solo soninvestigaciones aplicadas las que se enmarcan dentro de una secuencia programática de búsquedas quetienen como núcleo el diseño de teorías científicas.
De acuerdo a lo anterior, el presente trabajo se puede clasificar como un proyecto de investigaciónaplicada, ya que busca utilizar los conocimientos acerca de las técnicas de optimización por medio de unregulador lineal cuadrático (LQR) para lograr desarrollar una metodología para realizar el control desistemas dinámicos que presentan incertidumbre en sus parámetros, por medio de la técnica derealimentación multivariable de los estados.
3.3. Diseño de la investigación.
Se entiende por diseño de la investigación a aquella estrategia que establece el investigador pararesolver el problema planteado, el cual puede ser de tipo documental o bibliográfico, de campo oexperimental de acuerdo al tipo de datos a ser recogidos para llevar a cabo la investigación [60]. El presenteproyecto está enmarcado como una investigación experimental.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 32 / 78
3.4. Cronograma de actividades.
Para el desarrollo del sistema de simulación en el que se controlen las maniobras operativas de uncuadricóptero, se hace imprescindible la ejecución de las siguientes actividades a fin de lograr suconsecución.
Se inicia con la revisión de la documentación a nivel de artículos generados por los diversos gruposde investigación que se encuentran trabajando en el adelanto de las técnicas de control de esta clase dedispositivos aéreos, a objeto de tener la mejor idea posible de hacia donde se encuentran orientadas laslíneas de investigación de dichos grupos.
Una vez definida la dirección en que se debe llevar o ejecutar el trabajo, se hace necesario recopilartodas las bases teóricas disponibles al momento, a objeto de facilitar en cierto grado cualquier investigaciónposterior o que otros grupos locales de trabajo continúen con el desarrollo del tema propuesto.
En función de la orientación del trabajo investigativo y las bases teóricas ya establecidas, se debedeterminar el modelo de ecuaciones matemáticas que describirán el comportamiento tanto estático comodinámico del cuadricóptero.
Una vez determinadas las ecuaciones del vehículo, se debe realizar el diseño del controlador pormedio de la técnica de regulador lineal cuadrático con el fin de que el artilugio volador siga y mantengalos valores de consigna que representan las órdenes operativas le suministra el manipulador humano.
Una vez definido tanto el modelo del artilugio como la forma matemática del controlador, sedesarrollaran los programas computacionales utilizando el software MATLAB y cualquiera de susherramientas informáticas asociadas para interrelacionar el modelo del dispositivo aéreo con el controladorque indicará la magnitud de las acciones de control que corregirán las desviaciones en los valores deseados de los parámetros del sistema.
A objeto de lograr el mejor desempeño posible en el conjunto cuadricóptero-controlador, se hacenecesaria la definición y desarrollo de ciertas maniobras operativas que permitan entonar las acciones decontrol del regulador lineal cuadrático.
Una vez lograda la entonación del controlador, se debe comprobar el funcionamiento del sistemapor medio de la ejecución de acciones de maniobra parecidas, más no iguales, a las utilizadas en laentonación a objeto de observar la respuesta operativa del dispositivo aéreo ante eventualidadesimprevistas.
Para finalizar, se debe poner en orden la información y resultados obtenidos para escribir elcorrespondiente informe o tomo del trabajo especial de grado.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 33 / 78

3.5. Diagrama de avance.
SemanaActividad
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
RevisiónDocumental
BasesTeóricas
ModeloMatemático
DiseñoControlador
ProgramaciónMATLAB
Acciones deManiobra
ComprobaciónFuncional
Generación delDocumento
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 34 / 78

CAPÍTULO IV
4.1. Modelado matemático del sistema.
Para el modelado matemático que describe el comportamiento del sistema conformado por elcuatrirotor, se utilizarán algunas de las ecuaciones de la tesis doctoral del Prof. Samir Bouabdallah [22].Selección basada por el alto grado de impacto que tiene al ser uno de los trabajos más referenciados en losdiversos artículos de investigación publicados, y que fueron revisados durante la etapa investigativadocumental del presente trabajo.
4.2. Conceptos y generalidades.
El concepto seguido en este trabajo para el modelado dinámico fue el de escribir las ecuacionesfísicas del sistema, obtener los parámetros de relevancia para el desarrollo del modelo computacional eidentificar solamente la dinámica de los actuadores (propelas), que son los de mayor importancia para elcaso del cuadrirotor.
Con esta aproximación, se hace un poco más fácil la determinación y construcción computacionalde los modelos dinámicos de sistemas inestables, ya que no es posible realizar la identificación deparámetros en lazo cerrado durante el vuelo del vehículo. El formalismo de las ecuaciones de Euler-Lagrange y las ecuaciones de un motor de corriente continua comercial se utiliza para modelar con la mayorprecisión plausible una posible maqueta de trabajo. El formalismo de las ecuaciones de Newton-Euler, laidentificación de modelos, los elementos aerodinámicos de las palas en rotores comerciales, y la teoría demomentos se utilizan para modelar un cuadrirotor que sea factible de construir. En cualquier caso, elmodelo que se pretende desarrollar tiene las siguientes consideraciones:
< La estructura o cuerpo del dispositivo se asume que es rígida.< El cuerpo de la estructura tiene simetría longitudinal y transversal.< Hay coincidencia entre el centro de gravedad y el origen de los ejes de simetría.< Las propelas son rígidas.< El empuje y el arrastre de las propelas son proporcionales al cuadrado de la velocidad
angular de esta.
Los dispositivos aéreos bajo el principio de sustentación tipo helicóptero son sistemas mecánicosde elevada complejidad que reúnen numerosos efectos físicos resultantes de la aerodinámica y del dominiode la mecánica [63]. Uno de los efectos principales que se debe considerar el modelado del cuatrirotor ésel giroscópico, tanto por la rotación de las hélices como por la rotación del conjunto durante la realizaciónd las maniobras de vuelo. A continuación, en la Tabla 4.1 se indica una corta lista de los principales efectosa los que se encuentra sometido un cuadricóptero según lo establecido por Mullhaupt [64].

Tabla 4.1. Principales efectos que actúan sobre un cuadricóptero.
Efecto Fuente o Causa Formulación Matemática
Aerodinámica Rotación de las propelas C ⋅ Ω2
Batido de las palas.
Contra par inercial de torsión Cambio en la velocidad derotación de la propela.
J ⋅ &Ω
Aceleración de la gravedad Posición del centro de masa.
Efectos giroscópicos Cambio en la orientación delcuerpo del vehículo
I ⋅ ⋅θ ψ
Cambio en la orientación delplano de la propela
J r⋅ ⋅Ω θ φ,
Fricción Con el aire en todos lossentidos de movimiento
C C C⋅ ⋅ ⋅&, &, &φ θ ψ
4.3. Matriz de rotación, consideración aeronáutica.
Como se indicó en el apartado 2.2.4, la rotación de un cuerpo rígido en el espacio puede serparametrizada utilizando los Ángulos de Euler. Sin embargo, existen otros métodos como: Cuaternios olos ángulos de Tait-Bryan [65] más adecuados para su aplicación en una aeronave real.
En particular, los ángulos de Tait-Bryan (también llamados Ángulos de Cardano) son utilizados demanera extensa en Ingeniería Aeroespacial, donde también se les puede identificar como ángulos de Eulerajustados, ya que se limitan a los valores en los que puede girar o rotar parcialmente la aeronaveconsiderando que la posición horizontal “absoluta” corresponde a un valor angular 0 en cada eje derotación.
Particularmente para ingeniería aeroespacial, los ejes están referenciados para una aeronave que semueve en la dirección positiva del eje x, es decir, el desplazamiento horizontal a izquierdas se considerapositivo de manera tal que el lado derecho en el avance de la aeronave corresponde a la dirección positivadel eje y, con lo cual el eje z positivo es hacia abajo y como ya fue establecido en el apartado 2.2.2. estosángulos corresponden a la inclinación, elevación, y viraje.
En particular, considerando un sistema de coordenadas orientado según la regla de la mano derecha,las tres rotaciones más simples que se pueden hacer de manera individual y separada se pueden representarpor:
< R(x, ), para la rotación sobre el eje x.φ< R(y, ), para la rotación sobre el eje y.θ< R(z, ), para la rotación sobre el eje z.ψ
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 36 / 78

cuyas expresiones matriciales corresponden a (3), (4), y (5), con las siguientes limitaciones en el valor de
giro: , , , las cuales se establecen por el hecho de que lasφ π π∈ −
2 2, θ π π∈ −
2 2, ψ π π∈ −
2 2,
variaciones angulares (derivadas con respecto al tiempo) en los ángulos de Tait-Bryan pueden dar lugar afunciones discontinuas, lo cual es una condición muy diferente de las variaciones angulares de unaaeronave (p, q, r) que son medidas físicamente por giroscopios o unidades de medición inercial (IMU enidioma inglés) y comúnmente utilizadas en ingeniería aeroespacial para medir las rotaciones y orientaciónespacial de la aeronave.
En cuanto al aspecto matemático, la matriz de transformación para llevar desde [ ]p q rT
, ,
a viene dada según Etkin [66] como:[ ]&, &, &φ θ ψT
siendo la forma de la matriz de transformación la que se indica a continuación:
4.4. Modelado matemático del cuerpo del cuadricóptero.
Para la determinación del modelo dinámico de cualquier artefacto aéreo, se hace uso del conjuntode consideraciones de Euler-Lagrange [2] y la presunciones establecidas en el apartado 4.2, recordando queel Lagrangiano = Energía Cinética - Energía Potencial, es decir:
y la forma general de las ecuaciones de movimiento por el método de Lagrange es:
donde qi es el sistema de coordenadas generalizado, y Γi es el sistema de fuerzas generalizado.
Según lo establecido en la Figura 8, el sistema inercial de coordenadas fijado en la tierra, E, con la
base ortogonal definida por: , y el sistema móvil de coordenadas fijado en el vehículo, B, con[ , , ]r r rX Y Z
p
q
r
Rr
=
&
&
&
φθψ
(26)
Rr =−
1 0
0
0
sen
sen cos
- sen cos cos
θφ φ θφ φ θ
cos (27)
L T V= − (28)
Γii i
d
dt
L
q
L
q=
−
δδ
δδ&
(29)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 37 / 78

la base ortogonal definida por: y como ya ha sido establecido previamente, si cualquier punto[ , , ]r r rx y z
del vehículo experimenta tres rotaciones sucesivas, es posible expresar su ubicación espacial en cualquiermomento utilizando la expresión:
que es equivalente a:
Expresión que al ser derivada con respecto al tiempo nos da las correspondientes velocidades encada eje:
que por simplicidad puede ser expresada como:
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )
r x y z x y z
r x y z x y os z
r x y z x y z
X
Y
Z
, , cos cos cos cos cos cos
, , cos cos cos cos
, , cos cos cos
= + − + +
= + − + −
= − + +
ψ θ ψ θ φ ψ φ ψ θ φ ψ φψ θ ψ θ φ ψ φ ψ θ φ ψ φ
θ φ φ φ θ
sen sen sen sen sen sen
sen sen sen sen c sen sen sen
sen sen
(31)
( ) ( )r x y z R
x
y
zX Y Z, , , , , ,=
φ θ ψ (30)
( ) ( )( )( )
v x y z x
y
z
X , , cos & cos &
cos cos & & & cos cos & cos cos &
cos & cos & cos & cos & cos cos cos &
= − −
+ − + − + +
+ + − − +
sen sen
sen sen sen sen sen sen sen
sen sen sen sen sen sen
θ ψθ θ ψψ
ψ φψ ψ φφ ψ φ θψ ψ φ θφ ψ φ θθ
ψ φψ ψ φφ ψ φ θψ ψ φ θφ ψ φ θθ
(32)
( ) ( )( )( )
v x y z x
y
z
Y , , & cos cos &
cos & cos & cos & cos & cos &
& cos cos & cos cos & & cos cos &
= − +
+ − − + + +
+ + + − +
sen sen
sen sen sen sen sen sen sen sen
sen sen sen sen sen sen sen
θ ψθ θ ψψ
ψ φψ ψ φφ ψ φ θψ ψ φ θφ ψ φ θθ
ψ φψ ψ φφ ψ φ θψ ψ φ θφ ψ φ θθ
(33)
( ) ( )( )( )
v x y z x
y s
z
Z , , cos &
cos cos & &
cos & cos &
= −
+ −
+ − −
θθ
φ θφ φ θθ
φ θφ φ θθ
en sen
sen sen
(34)
( ) ( )v x y z xv yv zv v v v
x
y
zX Xx Xy Xz Xx Xy Xz, , = + + =
(35)
( ) ( )v x y z xv yv zv v v v
x
y
zY Yx Yy Yz Yx Yy Yz, , = + + =
(36)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 38 / 78

Donde la magnitud cuadrática de la velocidad para cualquier punto esta dada por:
con:
y donde:
siendo posible escribir la expresión anterior como:
( ) ( )v x y z xv yv zv v v v
x
y
zZ Zx Zy Zz Zx Zy Zz, , = + + =
(37)
( ) ( ) ( ) ( )v x y z v x y z v x y z v x y zX Y Z2 2 2 2, , , , , , , ,= + + (38)
( ) ( )( ) ( )( )( ) ( )( )
( )( )
v x y z x
y
z
xy
2 2 2 2 2
2 2 2 2 2
2 2 2 2
2
2
2
2
2
, , cos & &
& cos & cos cos & & & &
& cos & cos cos & & & &
& & cos & cos & & &
= +
+ + + − − + +
+ + + − + +
+ + − −
+
θψ θ
ψ φ φ θ ψ φ φ θθ φ θ φθ φ
ψ φ φ θ ψ φ φ θθ φ θ φθ φ
ψ φ θ θ ψ φ θθ φ θφ φφθ
sen sen sen sen sen
sen sen sen sen cos
sen sen cos sen sen cos
2 2 2
2 2 2 2
2
2
( )( )( )( )
xz
yz
& & cos & & & &
& & & cos cos & &
ψ φ θ θ ψ φ θφ φ θθ φφθ
ψ φ φ θ ψ φ θθ φ θθ φ φθ
2
2 2 22
cos sen cos cos sen sen sen
sen cos cos sen cos sen cos2 2
+ − − +
+ − + − +
(42)
( ) ( ) ( ) ( )v x y z v v v
v
v
v
v v v
v
v
v
v v v
v
v
vXx Xy Xz
Xx
Xy
Xz
Yx Yy Yz
Yx
Yy
Yz
Zx Zy Zz
Zx
Zy
Zz
2 , , =
+
+
Λ Λ Λ (39)
Λ =
x xy xz
xy y yz
xz yz z
2
2
2
(40)
( ) ( )( )( )
( )( )( )
v x y z x v v v
y v v v
z v v v
xy v v v v v v
xz v v v v v v
yz v v v v v v
Xx Yx Zx
Xy Yy Zy
Xz Yz Zz
Xx Xy Yx Yy Zx Zy
Xx Xz Yx Yz Zx Zz
Xy Xz Yy Yz Zy Zz
2 2 2 2 2
2 2 2 2
2 2 2 2
2
2
2
, , = ⋅ + +
+ ⋅ + +
+ ⋅ + +
+ ⋅ ⋅ + ⋅ + ⋅
+ ⋅ ⋅ + ⋅ + ⋅
+ ⋅ ⋅ + ⋅ + ⋅
(41)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 39 / 78

En cuanto a la expresión para la energía cinética se tiene la siguiente ecuación:
donde aparecen los momentos de inercia (elementos de la diagonal principal de la matriz) y los productosde inercia (elementos aledaños a la diagonal principal).
Una de las ventajas de la simetría mecánica del cuadrirotor es que permite ignorar los productosde inercia ya que la magnitud de estos son por lo general mil veces más pequeños que los momentos deinercia con lo cual la matriz de inercias se simplifica a solamente la diagonal principal. Con estaconsideración, la expresión para la energía cinética viene a ser:
Por otra parte, la expresión para la Energía Potencial viene a ser:
que bien puede ser expresada de la siguiente manera:
( ) ( )( )( )( )( )( )
( )( )
v x y z y z
x z
x y
xy
xz os
2 2 2 2
2 2 2 2 2
2 2 2 2 2
2
2
2
2
2
2
, , & & & &
& cos & & &
& cos cos & & &
& & & & cos & &
& &
= + − +
+ + +
+ + −
+ −
+
ψ θ θφψ φ
ψ φ θ φ φ θθψ φθ
ψ φ θ φ φ θθψ φθ
ψ φ θ θ ψ φ θθ φ θφ φφθ
ψ φ θ θ
sen sen
sen sen cos cos + cos
sen cos cos +sen
sen sen cos + cos sen -sen cos
c sen cos +
2 2
2 2
2 22
( )( )( )( )
ψ φ θφ φ θθ φφθ
ψ φ φ θ ψ φ θθ φ θθ φ φθ
- cos -sen sen sen
sen cos + sen - cos sen2 2 2
cos & & & &
& cos & cos & cos & cos &
+
+ − +2 2 2yz
(43)
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
T y z R dm r
z x R dm r
x y R dm r
xy R dm r
= + ⋅ −
+ + ⋅ +
+ + ⋅ −
+ ⋅ −
∫
∫
∫
1
22
1
22
1
22
2 2 2
2 2 2 2 2
2 2 2 2
2
& & & &
& cos & & & cos
& & & & cos cos
& & & & cos &
φ ψφ θ ψ θ
θ φ θψ φ φ θ ψ φ θ
θ φ θψ φ φ θ ψ φ θ
ψ φ θ θ ψ φ θθ φ θφ φφ
sen + sen
sen cos cos + sen
sen sen cos cos +
sen sen cos + cos sen -sen cos
2 2
2 2
2 2 2
( )( ) ( ) ( )( )( ) ( ) ( )( )
&
& cos & cos & & & &
& cos & cos & cos cos & cos &
θ
ψ φ θ θ ψ φ θφ φ θθ φφθ
ψ φ φ θ ψ φ θθ φ θθ φ φθ
∫
∫
∫
+ ⋅ +
+ ⋅ − +
xz R dm r
yz R dm r
2
2 2 2
sen cos + - cos -sen sen sen
sen cos + sen - sen2 2
(44)
( ) ( ) ( ) ( ) ( ) ( )V xdm x g ydm y g zdm z g= ⋅ − + ⋅ + ⋅∫∫ ∫ sen sen cosθ φ θ φ θcos cos (47)
( ) ( ) ( )T Ixx Iyy Izz= − + + +1
2
1
2
1
2
2 2& & &cos & & &φ ψ θ θ φ ψ φ θ θ φ ψ φ θsen sen cos sen - cos cos
2(45)
( ) ( )V g dm r= −∫ xsen + y sen cos + zcos cosθ φ θ φ θ (46)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 40 / 78

sustituyendo ahora en el lagrangiano (29) y considerando la ecuación de movimiento tenemos:
que después de desarrollar de manera sucesiva para cada una de las ecuaciones de: inclinación, elevación,y viraje, se obtienen las siguientes ecuaciones:
Estas ecuaciones pueden ser simplificadas por medio de la expresión de las velocidades yaceleraciones según los ángulos de Euler en el sistema inercial de referencia en función de las velocidadesy aceleraciones instantáneas del vehículo según el sistema móvil de coordenadas por medio de la utilizaciónde la matriz de transformación indicada en (27), de manera tal que los lagrangianos quedan expresados de
( ) ( )
( ) ( )
( )( ) ( ) ( )( ) ( ) ( ) ( )
d
dt
L LIyy Izz Iyy Izz
Ixx Iyy Izz Izz-Iyy
Iyy Izz Ixx xdm x g
ydm y g zdm z g
∂∂θ
∂∂θ
θ φ φ ψ φ θ
ψ θ φ φ θφ φ
ψφ θ φ θ
φ θ φ θ
&&& cos && cos
& cos & &
& & cos cos cos
cos
− = ⋅ + + ⋅ ⋅ −
+ ⋅ + + + ⋅
+ ⋅ ⋅ − + + ⋅ −
− ⋅ − ⋅
∫
∫∫
2
2 2
1
2
1
22
2
sen sen2
sen2 sen sen
sen sen sen
2
2
(50)
d
dt
L L
d
dt
L L
d
dt
L L
∂∂φ
∂∂φ
τ
∂∂θ
∂∂θ
τ
∂∂ψ
∂∂ψ
τ
φ
θ
ψ
&
&
&
− =
− =
− =
(48)
( )( )( )( ) ( )
( ) ( ) ( ) ( )
d
dt
L LIxx Ixx Ixx Iyy Izz
Iyy-Izz Iyy Izz
ydm y g zdm z g
∂∂φ
∂∂φ
φ ψ θ ψθ θ φ
θ φ ψ φ θ
φ θ φ θ
&&& && & & cos cos
& &
cos cos
− = ⋅ − ⋅ ⋅ − ⋅ + − −
+ ⋅ − ⋅ −
+ ⋅ − + ⋅∫∫
sen
sen2 sen2 cos
sen cos
2
2 1
1
2
1
2
2
2 2 (49)
( )( )( ) ( )( ) ( )( )( )( )
d
dt
L LIzz Iyy Ixx Ixx
Iyy Izz Ixx Izz Iyy
Iyy Izz Ixx Iyy Izz
Iyy Izz
∂∂ψ
∂∂ψ
ψ θ φ φ θ φ θ
θ φ θ θψ θ φ φ
ψφ φ θ θφ θ φ
θ φ θ
&&& cos cos &&
&& & & cos
& & cos & & cos cos
&
− = ⋅ + + − ⋅
+ ⋅ − + ⋅ − +
− ⋅ − + ⋅ + − −
− ⋅ −
2 2 2
2 2
2 2
2
1
22
2 2 1
1
22
sen sen sen
sen2 cos sen sen
sen
sen sen
2
(51)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 41 / 78

la siguiente forma:
Siendo los momentos no conservativos de la siguiente forma:
Es el desequilibrio en el empuje entre los motores 4 y 2.( )bl Ω Ω42
22−
Es el desequilibrio en el empuje entre los motores 3 y 1.( )bl Ω Ω32
12−
Es el desequilibrio en el empuje entre las propelas (1, 3) y (2, 4).( )d Ω Ω Ω Ω12
22
32
42− + −
Es el efecto giroscópico por causa de la rotación de las propelas.( )Jr yω Ω Ω Ω Ω1 3 2 4+ − −
Es el efecto giroscópico por causa de la rotación de las propelas.( )Jr xω − − + +Ω Ω Ω Ω1 3 2 4
donde el momento total actuando sobre los ejes x, y, z es:
Si ahora se considera una pequeña desviación en todos los ángulos del artefacto aéreo, la dinámicade los subsistemas de rotación viene a ser:
( ) ( )&&
&& &φ
θψθ=
+ − −+ − +
−J
Ixx
Iyy Izz
Ixx
bl
Ixxr Ω Ω Ω Ω Ω Ω
1 3 2 4 22
42
(58)
( )
( ) ( ) ( ) ( )
d
dt
L LIxx Iyy Izz
ydm y g zdm z g
x y z
∂∂φ
∂∂φ
ω ω ω
φ θ φ θ
&&
cos cos
− = − −
+ ⋅ − + ⋅ +∫∫ sen cos
(52)
( )( ) ( )( )( ) ( ) ( ) ( ) ( ) ( )
d
dt
L LIzz Ixx Iyy Iyy Izz Ixx
xdm x g ydm y g zdm z g
x y y x z
∂∂θ
∂∂θ
φ ω ω ω φ ω ω ω
θ φ θ φ θ
&& cos &
cos cos
− = − − − + ⋅ − −
+ ⋅ − − ⋅ − ⋅∫∫∫
sen
sen sen sen
z
(53)
( )( ) ( )( )( )( )
d
dt
L LIxx Iyy Izz Iyy Izz Ixx
Izz Ixx Iyy
y z x
z x y
∂∂ψ
∂∂ψ
θ ω ω ω φ θ ω ω ω
φ θ ω ω ω
&& &
cos cos &
− = − ⋅ − − + ⋅ − −
+ ⋅ − −
sen sen cosx y (54)
( ) ( )τ ωx r ybl J= − + + − −Ω Ω Ω Ω Ω Ω42
22
1 3 2 4 (55)
( ) ( )τ ωy r xbl J= − + − − + +Ω Ω Ω Ω Ω Ω32
12
1 3 2 4 (56)
( )τ z d= − + −Ω Ω Ω Ω12
22
32
42
(57)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 42 / 78

4.5. Modelado matemático del motor y la propela.
Para el modelado del motor, se considerará que este es de tipo estándar de corriente continua queobedece a las siguientes ecuaciones:
donde es el par de torsión del motor y Mfr es el momento opositor por efecto de la( )M k i tem m= ⋅fricción a causa del arrastre de la propela. Donde, si se ignora la inductancia, L, del motor por su pequeñotamaño, tenemos entonces que:
donde:
que es equivalente a:
en el caso de la propela se acople al motor por medio de un engranaje reductor de velocidad, el momentoopositor por efecto de la fricción a causa del arrastre aerodinámico queda de la siguiente forma:
donde η es la eficiencia del engranaje reductor de velocidad y r es la relación de reducción. Lo cual esequivalente a:
( ) ( )&&&
& &θφ
ψφ=− − + +
+ − +−J
Iyy
Izz Ixx
Iyy
bl
Iyyr Ω Ω Ω Ω Ω Ω
1 3 2 4 32
12
(59)
( )&& & &ψ θφ=
− + −+ −d
Izz
Ixx Iyy
Izz
Ω Ω Ω Ω12
22
32
42
(60)
( ) ( )Ldi t
dtu R i t kmot e m= − − ω (61)
Jd
dtM Mm
mem fr
ω= − (62)
( )i tu k
Re m
mot
=− ω
(63)
Jd
dtk
u k
RMm
mm
e m
motfr
ω ω= ⋅
−− (64)
Jk
RM
k
Rum m
m
motm fr
m
mot
&ω ω= − − +2
(65)
Md
rfrm=
ωη
2
(66)
ω ωη
ωpropelam
fr mrM
d
r= ⇒ =
32
(67)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 43 / 78

La inercia vista por el motor es:
si la inercia de la propela vista por el motor es Jpropela6motor. La ecuación del motor puede ser expresada enla siguiente forma:
Sí Jt es la inercia total vista por el motor, tenemos entonces que:
ecuación que puede ser reescrita si se considera que: 1 2
τ=
k
RJm
t
Si se considera que la velocidad de rotación de la propela, , experimenta variaciones pequeñas&ωm
alrededor de la velocidad de operación, la ecuación anterior puede ser linealizada en torno de porω0
medio de una serie de Taylor de primer orden, de forma tal que (71) puede ser reescrita con la forma:
De esta manera, se obtiene la expresión que nos indica la velocidad de rotación necesaria en lospropulsores para desarrollar las distintas maniobras de vuelo necesarias para acometer la ruta de vuelo.
J J JJ
rpropela propela popela motor m propela motorpropelaω η ωη
2 22
= ⋅ ⇒ =→ → (68)
J
rJ
k
R
d
r
k
Rupropela
m mm
motm
m
motηω ω
ηω
2
2
32+
= − − +& (69)
&ω ωη
ωmm
tm
tm
m
t
k
RJ
d
r J
k
RJu= − − +
2
32
(70)
&ωτ
ωη
ωτm m
tm
m
d
r J ku= − − +1 1
32
(71)
&
: , ,
ω ω
τω
η τω
η
m m
t m t
A Bu C
Con Ad
r JB
kC
d
r J
= − + +
= + = =1 2 103
03
(72)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 44 / 78

CAPÍTULO V
5.1. Estrategia de control.
En esta sección se planteará el desarrollo del controlador lineal cuadrático de seis grados de libertadcon la utilización de solamente cuatro acciones de control, las cuales corresponden con la velocidad de girode los rotores. Sin embargo, antes de entrar en la aplicación de la teoría de control óptimo, se pondrán en“orden” el conjunto de ecuaciones desarrolladas en la sección anterior y correspondientes con el modeladomatemático del vehículo a objeto de establecer las variables que definirán el espacio de estado del artefactoaéreo vehículo, y de estas se desprenderá el referido controlador.
5.2. Resumen del modelo matemático del cuatrirotor.
Según lo pautado por el desarrollo matemático del capítulo anterior, se puede establecer que el
vector definido por es el contentivo de las coordenadas de posición lineal y angular del[ ]x y zT
, , , , ,φ θ ψ
cuatrirotor en el sistema inercial de coordenadas, y el vector definido por es el[ ]u v w p q rT
, , , , ,contentivo de las coordenadas de posición lineal y angular del cuatrirotor en el sistema móvil decoordenadas. De las ecuaciones sobre la dinámica del vehículo en tres dimensiones, se puede establecerque los dos sistemas de referencia se encuentran enlazados por las siguientes relaciones:
donde , , , , con[ ]v x y zT= ∈&, &, & R 3 [ ]ω φ θ ψ= ∈&, &, &
TR 3 [ ]v u v wB
T= ∈, , R 3 [ ]ωB
Tp q r= ∈, , R 3
R la matriz del rotacional definida en (7), y T la matriz para las transformaciones angulares según Lee [67].
de manera tal que el modelo cinemático del cuatrirotor se puede resumir en:
v R vB= ⋅ (73)
ω ω= ⋅T B (74)
T = −
1
0
0
sen
sen sen
cos
cos
cos
φ θ φ θφ φφθ
φθ
tan cos tan
cos (75)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 45 / 78

y el modelo dinámico completo, considerando las fuerzas, del cuatrirotor en el sistema móvil decoordenadas en el que f representa las fuerzas, m la masa del vehículo, I las inercias del sistema, g laaceleración de la gravedad, τ los pares de torsión por efecto de los rotores, τw los pares de torsión porefecto de las ráfagas de viento, viene a ser:
5.3. Modelo en el espacio de estado.
Según lo establecido en el resumen anterior, se define el vector de espacio de estado que describela cinemática y la dinámica del vehículo aéreo, el cual viene a ser:
y con esta definición es posible reescribir las ecuaciones que describen de la dinámica completa delcuadrirotor establecida en (76) y (77) en la siguiente forma:
[ ] ( )[ ] ( )[ ] ( )
− + = + −
+ = − +
+ − = + −+ = − +
+ = + −+ = − +
mg f m u qw rv
mg f m v pw ru
mg f f m w pv qu
pI qrI qrI
qI prI prI
rI pqI pqI
wx
wy
wz t
x wx x y z
y wy y x z
z wz z x y
sen
sen
θθ φθ φ
τ ττ ττ τ
&
cos &
cos cos &
&
&
&
(77)
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ]
[ ] [ ][ ] [ ]
& cos cos cos
& cos cos cos
& cos cos cos
& cos tan
& cos
&cos
cos
x w v u
y v w u
z w u v
p r q
q r
r q
= − +
= − +
= − +
= + +
= −
= +
sen sen + cos cos sen sen -cos sen sen
cos +sen sen sen sen -cos sen sen sen
sen sen
sen tan
sen
sen
cos
φ ψ φ ψ θ φ ψ ψ φ θ ψ θφ ψ φ ψ θ ψ φ φ ψ θ θ ψφ θ θ θ φ
φ φ θ φ θ
θ φ φ
ψ φθ
φθ
(76)
[ ]X p q r u v w x y zT= ∈φ θ ψ, , , , , , , , , , , R12 (78)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 46 / 78

si ahora se aplican las leyes del movimiento de Newton se pueden obtener dos formas alternativas delmodelo dinámico del cuadricoptero, muy útiles para el estudio del control del vehículo.
La primera, relacionada con (76) se puede expresar de forma matricial como se indica acontinuación:
con lo que la segunda, relacionada con (77) se puede expresar de la siguiente manera:
[ ] [ ][ ] [ ]
[ ]
[ ]
[ ]
& cos tan
& cos
&cos
cos
&
&
&
&
&
& cos cos
&
φ φ θ φ θ
θ φ φ
ψ φθ
φθ
τ τ
τ τ
τ τ
θ
φ θ
θ φ
= + +
= −
= +
=−
++
=−
++
=−
++
= − − +
= − + +
= − + +−
=
p r q
q r
r q
pI I
Irq
I
qI I
Ipr
I
rI I
Ipq
I
u rv qw gf
m
v pw ru gf
m
w qu pv gf f
mx
y z
x
x wx
x
z x
y
y wy
y
x y
z
z wz
z
wx
wy
wz t
sen tan
sen
sen
cos
sen
sen cos
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ]
w v u
y v w u
z w u v
sen sen + cos cos sen sen - cos sen sen
cos cos + sen sen sen sen - sen cos sen sen
sen sen
φ ψ φ ψ θ φ ψ ψ φ θ ψ θφ ψ φ ψ θ φ ψ ψ φ θ ψ θφ θ θ θ φ
− +
= − +
= − +
cos cos cos
& cos cos
& cos cos cos
(79)
m mg ft& $ $v R f e R eB z 3= ⋅ = − ⋅ (80)
[ ]
[ ]
[ ]
&&
&& cos
&& cos cos
xf
m
yf
m
z gf
m
t
t
t
= −
= −
= −
sen sen + cos cos sen
sen sen - cos sen
φ ψ φ ψ θ
φ ψ θ ψ φ
φ θ
(81)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 47 / 78

Si ahora se toma en cuenta la consideración de Das [68] en la que el vehículo solo experimentapequeños cambios en sus ángulos de orientación durante las maniobras a causa de su baja velocidad de
desplazamiento, se puede realizar la siguiente simplificación: , de manera tal que[ ] [ ]&, &, & , ,φ θ ψT T
p q r=el modelo dinámico del cuadrirotor en el sistema inercial de coordenadas viene a ser:
lo cual permite redefinir el vector de estado a la siguiente forma:
haciéndose posible reescribir las ecuaciones del cuatrirotor en el espacio de estado en forma compactacomo:
donde f(x) y gi(x) vienen a ser de la siguiente forma:
[ ]
[ ]
[ ]
&&
&&
&& cos cos
&& & &
&& & &
&& & &
xf
m
yf
mf
mI I
I I
I I
I I
I I
I I
t
t
t
y z
x
x
x
z x
y
y
y
x y
z
z
z
= −
= − −
−
=−
+
= − +
=−
+
sen sen + cos cos sen
cos sen sen cos sen
z = g
φ ψ φ ψ θ
φ ψ θ ψ φ
φ θ
φ θψ τ
θ φψτ
ψ φθ τ
(82)
[ ]X x y z x y z p q rT= ∈, , , , , ,&, &, &, , ,φ θ ψ R12 (83)
( ) ( )&x x x ui ii
= +=∑f g
1
4
(84)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 48 / 78

donde para g1(x) se tiene que:
( )
[ ] [ ][ ] [ ]
f
sen
sen
p + q sen tan
x
x
y
z
q r
q r
r
gI I
Iqr
I I
Ipr
I I
Ipq
y z
x
z x
y
x y
z
=
+
−+
−
−
−
&
&
&
cos
cos
coscos
cos tan
φθ
φθ
φ φφ θ φ θ
0
0(85)
( ) [ ]( )
( )
( )
g
g
g
g
1 x g g g
xI
xI
xI
a b c
T
x
T
y
T
z
T
= ∈
=
∈
=
∈
=
∈
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 01
0 0
0 0 0 0 0 0 0 0 0 01
0
0 0 0 0 0 0 0 0 0 0 01
12
212
312
312
, , , , , , , , , , ,
, , , , , , , , , , ,
, , , , , , , , , , ,
, , , , , , , , , , ,
R
R
R
R
(86)
[ ]
[ ]
[ ]
gm
gm
gm
a
b
c
= −
= − −
= −
1
1
1
sen sen + cos cos sen
sen cos cos sen sen
cos cos
φ ψ φ ψ θ
φ ψ φ ψ θ
φ θ
(87)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 49 / 78

5.4. Modelo lineal en el espacio de estado.
Si se define la variable u como el vector de control con la siguiente forma:
. El procedimiento de linealización se desarrollará alrededor de un punto de[ ]u ft x y z
T= ∈, , ,τ τ τ R4
equilibrio , que para una entrada definida es la solución del sistema de ecuaciones algebraicas. Lo quex utambién puede ser definido como el conjunto de valores del vector de espacio de estado que para unaentrada constante es la solución del sistema algebraico de ecuaciones, es decir:
Como la función en (88) es no lineal, los problemas relacionados con la existencia o no de una$fúnica solución al sistema de ecuaciones se incrementa ampliamente.
En particular, para el sistema de ecuaciones ya establecido y que definen el comportamiento delcuadricóptero, es muy difícil de encontrar una solución cerrada por causa de que las funcionestrigonométricas se encuentran relacionadas unas con otras de una manera no elemental. Por esta razón, lalinealización se desarrolla para un modelo simplificado donde las oscilaciones en la postura sean pequeñas,de manera tal que la simplificación se fundamenta en la aproximación de la función senoidal a suargumento y la función cosenoidal a la unidad.
Consideraciones que son válidas si el valor en el incremento del argumento es pequeño ya que seconsidera que el vehículo se encuentra sobre la horizontal absoluta y por tanto el valor de los ángulos escero como se establece en el sistema de coordenadas angular de Tait-Bryan. En las ecuaciones acontinuación se describe el sistema resultante por la linealización.
( )$ ,f x u = 0 (88)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 50 / 78

sistema de ecuaciones que puede ser escrito de manera compacta con la siguiente expresión:
5.5. Linealización en el espacio de estado.
Como se indicó anteriormente, a objeto de realizar la linealización es imprescindible definir unpunto de equilibrio, el cual puede ser el que se indica a continuación:
ya que de las ecuaciones indicadas en (89), se puede demostrar que la condición de punto de equilibrio para(91) se obtiene para un valor constante de entrada definido por:
( )& ,x f x u= (90)
( ) ( )( ) ( )
&
&
&
&
&
&
&
&
&
&
&
&
φ θ φθθ φψ φ
τ τ
τ τ
τ τ
θ
φ
φψ θ ψ φθφψθ φ ψθ ψ
≈ + +
≈ −≈ +
≈−
+ +
≈ − ++
≈−
+ +
≈ − − +
≈ − + +
≈ − + + −
≈ + − − +
≈ + − − +
p r q
q r
r q
pI I
Irq
I
qI I
Ipr
I
rI I
Ipq
I
u rv qw gf
m
v pw ru gf
m
w qu pv gf f
mx w v u
y v w u
y z
x
x wx
x
z x
y
y wy
y
x y
z
z wz
z
wx
wy
wz t
1
z w u v≈ − +θ φ
(89)
[ ]x x y zT= ∈0 0 0 0 0 0 0 0 0 12, , , , , , , , , , , R (91)
[ ]u mgT= ∈, , ,0 0 0 4R (92)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 51 / 78

del cual se hace imprescindible indicar que este valor en particular representa la fuerza necesaria paracontrarrestar el peso del artefacto aéreo y mantener una posición de flotación o merodeo en función de lasperturbaciones por efecto de las corrientes atmosféricas. Después de determinarse el punto de equilibrio xy la entrada nominal correspondiente , se puede determinar las matrices asociadas con el sistema linealuy que se encuentran determinadas por las siguientes relaciones:
y si se consideran las perturbaciones por efecto del viento atmosférico, definiendoselas como:
( )A
x, u
x g
g
= =−
∂∂
f
0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 1 0 0 0
(93)
[ ]d f f fwx wy wz wx wy wz= ∈, , , , ,τ τ τ R6(95)
( )B
x u
u
I
I
I
m
x
y
z
= =
∂∂
f ,
0 0 0 0
0 0 0 0
0 0 0 0
01
0 0
0 01
0
0 0 01
0 0 0 0
0 0 0 01
0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
(94)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 52 / 78

se obtiene la matriz correspondiente con la forma:
con lo que de manera compacta el modelo linealizado queda definido según (97):
Quedando el sistema de variables de estado como se indica a continuación:
( )D
f x u d
d
I
I
I
m
m
m
x
y
z= =
∂∂
, ,
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 01
0 0
0 0 0 01
0
0 0 0 0 01
10 0 0 0 0
01
0 0 0 0
0 01
0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
(96)
&x A x B u D d= ⋅ + ⋅ + ⋅ (97)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 53 / 78

5.6. Controlabilidad y Observabilidad del sistema linealizado.
La controlabilidad y la observabilidad son los dos principales conceptos aportados por la teoría decontrol moderno [69]. Estos conceptos como tal fueron introducidos por R. Kalman en su tesis doctoralen 1960, los cuales pueden ser enunciados de manera general como se indica a continuación:
Un sistema es controlable a un tiempo si es posible transferir mediante el uso de unt0
vector de control sin restricciones al sistema desde el estado inicial a cualquier otro( )x t0
estado en un intervalo finito de tiempo, con lo cual se puede establecer que un sistemaexhibe controlabilidad completa si todos los estados son controlables.
Un sistema es observable a un tiempo si con el sistema en un estado inicial ; est0 ( )x t0
posible determinar este estado a partir de las observaciones de la salida durante un( )y tintervalo finito de tiempo, con lo cual se puede establecer que un sistema exhibeobservabilidad completa si todos los estados son observables.
&
&
&
&
&
&
&
&
&
&
&
&
φθψ
τ τ
τ τ
τ τ
θ
φ
=
==
= +
=+
= +
= − +
= +
= −
===
p
q
r
pI
qI
rI
u gf
m
v gf
m
wf f
mx u
y v
z w
x wx
x
y wy
y
z wz
z
wx
wy
wz t
(98)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 54 / 78

Los conceptos de controlabilidad y observabilidad para un sistema dinámico lineal invariante enel tiempo puede ser apropiadamente relacionado con un sistema de ecuaciones algebraicas lineales del quees ampliamente sabido que el sistema tiene solución sí y solo sí el rango del sistema matricial es completo.En tal sentido, las pruebas de controlabilidad y observabilidad de un sistema pueden relacionarse con laspruebas de rango de ciertas matrices, las cuales se llaman de controlabilidad y observabilidad si cumplencon el criterio. A efectos de estudio o demostración del concepto de observabilidad, considerese elsiguiente sistema lineal:
donde A está definido según (93) y con la siguiente ecuación de medición:
donde las dimensiones de las diferentes variables son:
de manera tal que la matriz de observabilidad se encuentra dada por:
de manera tal que el sistema lineal continuo en el tiempo definido por (99) y con mediciones como seindica en (100) es observable si y solo el rango de la matriz definida en (102) es completo.
Por otra parte, la matriz de controlabilidad viene definida por:
donde B se encuentra definida en (94), y el sistema lineal continuo en el tiempo se encuentra definido en(99) con ecuación de medición definida en (100). De manera tal que este sistema es controlable si y solosi la matriz de controlabilidad tiene rango completo.
Desde el punto de vista práctico y por el tamaño de las matrices involucradas, la verificación de lacontrolabilidad y la observabilidad del modelo del cuadricóptero se realizará utilizando MATLAB.
( )& ,x A x x t x= ⋅ =0 0 (99)
y C x= ⋅ (100)
x y A Cx x∈ ∈ ∈ ∈R R R R12 12 12 12 12 12, , , (101)
O
C
C A
C A
C A
C A
x=
⋅⋅⋅
⋅
∈2
3
11
144 12
M
R (102)
[ ]C B A B A B A B A B x= ⋅ ⋅ ⋅ ⋅ ∈, , , , ,2 3 11 12 48L R (103)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 55 / 78

5.7. Control de posición por medio de un Regulador Lineal Cuadrático (LQR).
El objetivo de las técnicas de control óptimo según Murray [70] es determinar las señales de controlnecesarias de manera tal que para que el sistema sea controlado se cumpla con restricciones físicas quepermitan minimizar la función de costo y/o maximizar la función de desempeño. Específicamente, la
solución de un problema de optimización es pretender llevar el estado del sistema por la trayectoria( )x t
deseada minimizando el costo del traslado. Además, debe minimizar el uso de las entradas de control,xd
para de este modo se reduzca el uso de los actuadores.
Aunado a lo anterior, las necesidades secundarias en la optimización del control son:
< Un modelo capaz de describir de la mejor manera posible el comportamiento del sistemadinámico objeto de control.
< Un índice de costo J , que tome en cuenta las especificaciones del sistema y las necesidadesdel diseñador.
< Definición de posibles condiciones de frontera y restricciones físicas que limiten el sistema.
Considerese un sistema dinámico donde las variables de estado pertenecen al conjunto x, y lasentradas de control pertenecen al conjunto u, de manera tal que:
siendo x un vector con longitud n-1, y u un vector con longitud r-1, de manera tal que es posible definir lafunción de costo, J, como:
donde el costo terminal, e, es una función no negativa al igual que la función de peso, w, de manera tal que
, y , donde las condiciones de frontera son: , y sin( )e 0 0= ( )w t0 0 0, , = ( )x t x0 0= ( )x t f t f
restricciones. Siendo posible definir la solución del problema de optimización como:
que es una función que busca minimizar a J. Considerando que el límite del intervalo de tiempo es unaaproximación infinita, con lo cual el sistema y el índice de costo se manifiestan de la siguiente manera:
( )[ ] ( ) ( )[ ]J e x tf w x t u t t dt
t
t f
= +∫ , ,
0
(105)
( ) ( ) ( )[ ]& , ,x t f x t u t t= (104)
( ) [ ]u t t t t f, ,∀ ∈ 0 (106)
&x A x B u
y C x
= ⋅ + ⋅= ⋅
(107)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 56 / 78

siendo R y Q matrices que:
< R es el costo de los actuadores (R = R T que es una matriz definida positiva; R 0 Rmxm ).< Q es el costo de los estados (Q = Q T que es una matriz semi definida positiva; Q 0 Rrxr ).
Y según demuestra Murray [70] la entrada de control u(t) que minimiza al funcional es una realimentaciónlineal de estados con la forma:
donde:
Siendo S la matriz que es solución de la ecuación algebraica de Ricatti, la cual se indica a continuación:
donde S es una matriz definida positiva, siendo la Figura 13 el esquema del sistema implementado.
Debe tenerse presente que aunque el esquema de control pueda parecer muy simple, se trata de unsistema matricial con el vector xd definiendo las coordenadas de la posición espacial deseada y el vector x definiendo la posición espacial obtenida en función del tiempo, es decir, la trayectoria recorrida para irde una posición a la otra.
Es de hacerse notar que la ecuación algebraica puede ser resuelta por medio del método de Ricattial utilizarse la función de MATLAB; LQR, cuya sintaxis se define a continuación:
Según el trabajo de Murray [70], sobre el problema del controlador LQR para un horizonte infinito
y la factorización de la matriz , si el par conformado por las matrices A y B es controlable yQ = ⋅E ET
el par conformado por las matrices A y E es observable, se puede establecer que:
( ) ( ) ( ) ( )[ ] ( ) ( )[ ] J u t u t x t x t x t x t dtT
d
T
d
t
= ⋅ ⋅ + − ⋅ ⋅ −
∞
∫ R Q
0
(108)
( ) ( ) ( )[ ]u t K x t x td= − ⋅ − (109)
K B ST= ⋅ ⋅−R 1 (110)
S A A S S B B S C CT T T⋅ + ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅ =−R Q1 0 (111)
Figura 13 Esquema de control LQR
( )K LQR A B= , , ,Q R (112)
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 57 / 78

< Debe existir una matriz S que es una solución definida positiva de la ecuación algebraicade Ricatti.
< El sistema de lazo cerrado es asintóticamente estable, con( )&x A BK x= − ⋅.K B ST= ⋅ ⋅−R 1
Una prueba numérica sencilla que permite escoger los valores de las matrices Q y R tomando encuenta las matrices A (93) y B (94) se logra considerando el sistema lineal definido en (97) sin considerarla parte correspondiente a las perturbaciones por las ráfagas de viento atmosférico.
Obviamente, tomando en cuenta la complejidad de las ecuaciones por su estructura matricial, elsistema de simulación se desarrollará utilizando el software MATLAB y todas sus funciones asociadas pormedio de un guión de línea de comandos ya que permite un mayor control en cuanto a secuencia yestructura de funcionamiento en relación a la utilización del SIMULINK.
5.8. Estructura del programa de simulación.
Como tal, el programa de simulación desarrollado para el modelado del cuadricóptero y sudesempeño con el controlador LQR en el seguimiento de una trayectoria cualquiera tiene una extensión demás de 800 líneas de código en instrucciones de MATLAB, razón por la cual no se anexa al presentedocumento, más sin embargo, se indica a continuación la estructura general u orden de secuencia deactividades para el logro de la meta propuesta.
En primer lugar y como factor común de todo programa de computadora, se “Limpió” el espaciode trabajo y memoria de todas las variables numéricas y gráficas. A continuación, se definieron lasparámetros de resolución gráfica del monitor, ya que obviamente, al ser el trabajo principal una simulacióntodos los resultados deben ser visualizados. Definiéndose a continuación y en formato de matriz de n filasx 3 columnas las coordenadas de los diferentes puntos espaciales de interés en la trayectoria a recorrer. Laventaja que presenta este formato matricial es que pueden ser definidas varias trayectorias a efectos deobservación de resultados de comportamiento. Para finalizar este segmento de configuración inicial delprograma y tomando en cuenta la gran cantidad de resultados gráficos, se creó un menu que permite definirque resultados desean ser visualizados en cada corrida del programa.
Posterior a la configuración inicial, se cargan los valores dimensionales físicos del cuadricópteroy se desarrolla el modelo analítico de ecuaciones linealizadas que describen al artefacto y en las cuales sesustituirán los valores dimensionales durante la simulación. En este punto se hace necesario realizar laverificación de las matrices en el espacio de estado que modelan al cuatrimotor. Se verifica la estabilidaddel modelo matemático continuo del sistema por medio de la observación de la respuesta de esta ante unaentrada escalón unitario, se verifican también las matrices de controlabilidad y de observabilidad delsistema continuo por medio del cálculo del rango de estas.
Una vez verificada la funcionalidad matemática de las diversas matrices que describen el modelodel artefacto aéreo y tomando en cuenta que el MATLAB como sistema de simulación trabaja porincrementos de tiempo, se opta por discretizar al sistema continuo lineal a efectos de utilizar un mismoperíodo de muestreo para todos los cálculos a ser realizados, y en todas las funciones de necesario uso.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 58 / 78

Ya con el sistema de ecuaciones discretizadas, se realiza nuevamente la verificación de las matricesen el espacio de estado que modelan al cuatrimotor. Se verifica la estabilidad del modelo matemático del sistema por medio de la observación de la respuesta de esta ante una entrada escalón unitario, se verificantambién las matrices de controlabilidad y de observabilidad por medio del calculo del rango de estas y loscuales deben ser iguales en resultado numérico a los del sistema continuo a efectos de correspondencia.
Para finalizar, se realiza la visualización de los resultados de la navegación tridimensional, delcomportamiento de las variables de estado, y de las acciones de control necesarias para el seguimiento dela trayectoria definida al inicio por medio de sus puntos de interés a objeto de comprobar el desempeño delcontrolador LQR.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 59 / 78

CAPÍTULO VI
6.1. Resultados de la simulación.
A continuación se anexan una serie de imágenes que son resultantes de la graficación de los valoresnuméricos tanto del modelo matemático continuo y discreto en lazo abierto que describe al vehículo, comodel sistema en lazo cerrado con la utilización de un controlador LQR que permite obtener la simulación devuelo del cuadricóptero en la trayectoria más simple cuando desde un punto de origen con coordenadasx=0, y=0, y z=0 se dirige a un único punto de llegada con coordenadas x = 5.0, y = 5.1, z = 5.2.
En la Figura 14, se puede apreciar el mapa de polos y ceros en el plano S del modelo matemáticocontinuo y linealizado.
En la Figura 15, se puede apreciar la respuesta del sistema en lazo abierto ante una entrada escalónunitario. La razón para escoger este tipo de entrada se basa en el hecho de que la trayectoria de navegaciónse encuentra definida por puntos de interés separados entre si, de manera tal que el viaje del cuatrirotor deun punto de interés a otro se puede considerar como un cambio escalón no unitario tridimensional.
Figura 14 Mapa de polos y ceros en lazo abierto del sistema linealizado.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 60 / 78

En la Figura 16, se observa la respuesta que suministra MATLAB cuando se le consulta sobre elvalor de los polos del sistema en tiempo continuo, lazo abierto, y sobre los rangos de las matrices decontrolabilidad y observabilidadilidad a efectos de verificar si las consideraciones de linealización permitencontrolar al vehículo y observar de manera directa sus variables de estado.
Figura 15 Respuesta al escalón unitario en lazo abierto.
Figura 16 Respuesta de MATLAB sobrela ubicación de los polos y rangos de lasmatrices.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 61 / 78

En la Figura 17, se puede apreciar el mapa de polos y ceros en el plano Z del modelo matemáticodel sistema discretizado con un periodo de muestreo de 0.1 segundos.
En la Figura 18, se puede apreciar la respuesta del sistema discretizado con un periodo de muestreode 0.1 segundos y en lazo abierto ante una entrada escalón unitario.
Figura 17 Mapa de polos y ceros del sistema discreto.
Figura 18 Respuesta del sistema discreto a una entradaescalón unitario.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 62 / 78

En la Figura 19, se observa la respuesta que suministra MATLAB cuando se le consulta sobre elvalor de los polos del sistema en tiempo discreto, lazo abierto, y sobre los rangos de las matrices decontrolabilidad y observabilidadilidad a efectos de verificar si las consideraciones de linealización permitencontrolar al vehículo y observar de manera directa sus variables de estado.
En la Figura 20, se observa la respuesta del cuadricóptero a las coordenadas de cambio de posiciónque originan la navegación del vehículo con un valor de penalización para la variable de estado del ejecoordenado Z de 1000 en la matriz de costo Q.
Figura 19 Respuesta de MATLAB sobrela ubicación de los polos y rangos de lasmatrices.
Figura 20 Respuesta al seguimiento de la trayectoria.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 63 / 78

En la Figura 21, se muestran las velocidades de desplazamiento con respecto al sistema inercial decoordenadas que experimenta el cuatrirotor a efecto de lograr el cambio de posición espacial, con un valorde penalización de 1000 para la variable de estado del eje coordenado Z en la matriz de costo Q.
En la Figura 22, se muestra el valor de los ángulos que definen la postura del cuadricóptero en elsistema de coordenadas del vehículo o móvil, con un valor de penalización para la variable de estado deleje coordenado Z de 1000 en la matriz de costo Q.
Figura 21 Velocidades del vehículo en el sistemainercial de coordenadas.
Figura 22 Valores de la postura del cuatrirotor.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 64 / 78

En la Figura 23, se observan los valores de los rotacionales que experimenta el vehículo aéreo ensus ejes y con respecto al sistema inercial de coordenadas, con un valor de penalización de 1000 para lavariable de estado del eje coordenado Z en la matriz de costo Q.
En la Figura 24, se observa la navegación espacial efectuada por el vehículo aéreo, con un valor depenalización para la variable de estado del eje coordenado Z de 1000 en la matriz de costo Q.
Figura 23 Valores de los rotacionales delartefacto aéreo.
Figura 24 Trayectoria realizada.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 65 / 78

En la Figura 25, se observa la velocidad rotacional que deben tener las distintas propelas paraefectuar la navegación descrita en la Figura 24 con un valor de penalización de 1000 para la variable deestado del eje coordenado Z en la matriz de costo Q.
A continuación se anexan una serie de figuras para una misma trayectoria compleja a efectos decomprobar el real funcionamiento del sistema de simulación por medio del incremento en el valor depenalización únicamente para la matriz de costo Q, la cual se encuentra relacionada con los estados delsistema, de manera tal que en esta se pueden penalizar los estados indeseados con el objeto de alcanzar elestado estacionario lo antes posible. Estos valores de penalización son una forma de modificar los valoresde la matriz de ganancia K a objeto de entonar el controlador.
En cuanto a la matriz de costo R, la cual se encuentra relacionada con las acciones de control, seopta a efecto de los ensayos asignarle como valor la unidad, matriz identidad, ya que al incrementarsele lospesos (manteniendo los pesos de Q constantes) se incrementa la penalización por acciones de control másenérgicas o con mayor consumo de energía, con lo cual los esfuerzos de control son más pequeños al igualque los valores de la matriz de ganancia K, y por tal razón el sistema alcanza el estado estacionario más lentamente.
De lo anteriormente pautado, se establece que a efectos del sistema de simulación la premisa decontrol que se busca cumplir es que el sistema se estabilice lo antes posible, respuesta rápida, sin tener encuenta los requerimientos energéticos de las acciones de control.
Como ya fue indicado, la matriz de costo Q corresponde a las variables de estado, que son doce,y la matriz de costo R corresponde a la acción de control por medio de las propelas, que son cuatro. Comose puede inferir, el número de combinaciones crece de manera exponencial lo cual queda fuera del alcancede este trabajo. En tal sentido, como el objeto de un vehículo aéreo es levantar vuelo venciendo el efectodel peso por acción de la aceleración de la gravedad, únicamente se incrementará la penalización para lavariable de estado correspondiente al eje z en la matriz de costo Q.
Figura 25 Valores de la acción de control en laspropelas.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 66 / 78

Los valores de peso que tomará Qz a objeto de incrementar la penalización son: 1, 10, 100, 1000,10000, y 100000, lo que significa que en cada caso el sistema aéreo será menos tolerante a las desviaciones en la elevación del vehículo en estado estacionario.
Los valores de las coordenadas de navegación para la trayectoria compleja son los que se indicanen la Tabla 6.1.
Tabla 6.1. Valores de las coordenadas de navegación, enmetros.
X Y Z Observación
0 0 0 Arranque
0 0 1.8
0 2.3 1.8
2.2 2.1 1.8
2.7 -1.8 1.3
-2.3 -2.7 1.8
-2.4 1.3 0.8
-1.75 1.1 0 Llegada
Figura 26 Navegación con Qz=1.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 67 / 78

Figura 27 Navegación con Qz=10.
Figura 28 Navegación con Qz=100.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 68 / 78

Figura 29 Navegación con Qz=1000.
Figura 30 Navegación con Qz=10000.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 69 / 78

6.2. Análisis de los resultados de la simulación.
En la Figura 14, se observa que el sistema continuo, linealizado, y en lazo abierto tiene solamentedos polos, sistema de segundo orden, y uno de los polos se encuentra sobre el origen con lo cual seestablece que es un sistema marginalmente estable.
En la Figura 15, a diferencia de lo inferido de la Figura 14, se observa que el sistema en lazo abiertono es de segundo orden ni marginalmente estable, ya que varias de las respuestas del sistema ante unaentrada del tipo escalón unitario son no acotadas.
En la Figura 16, se aprecia la respuesta de MATLAB al preguntarsele tanto por el valor de los polosdel sistema en lazo abierto, como por el rango de las matrices de controlabilidad y observabilidad. Encuanto al valor de los polos del sistema se aprecia que son nueve los que se encuentran sobre el origen conlo cual se establece sin lugar a dudas que el sistema es inestable por naturaleza propia ya que lamultiplicidad de polos sobre el eje imaginario es mayor a uno. En cuanto a los rangos de las matrices seaprecia que la respuesta es 12 para cada una de ellas; lo cual indica que el número de ecuacioneslinealmente independientes es igual al número de variables de estado, razón por la cual se puede establecerque el sistema es controlable y observable en lazo cerrado.
Para el caso de la Figura 17, se ha discretizado el sistema continuo con un periodo de muestreo de0.1 segundo para una adecuada simulación en MATLAB, apreciandose que este modelo en lazo abiertotiene polos sobre el círculo unitario lo cual indica que el sistema discreto en lazo abierto es inestable pornaturaleza propia.
Figura 31 Navegación con Qz=100000.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 70 / 78

En la Figura 18, se comprueba la inestabilidad del sistema discreto en lazo abierto ya que varias delas respuestas ante una entrada del tipo escalón unitario son no acotadas.
En la Figura 19, se aprecia la respuesta de MATLAB al preguntarsele tanto por el valor de los polosdel sistema discreto en lazo abierto, como por el rango de las matrices de controlabilidad y observabilidad.En cuanto al valor de los polos del sistema se aprecia que son nueve los que se encuentran sobre el circulounitario con lo cual se establece sin lugar a dudas que el sistema es inestable por naturaleza propia. Encuanto a los rangos de las matrices se aprecia que la respuesta es 12 para cada una de ellas; lo cual indicaque el sistema discreto es observable y controlable en lazo cerrado.
En la Figura 20, se aprecia la respuesta del sistema al seguimiento de una trayectoria simple, en lacual el sistema en lazo cerrado y con controlador LQR tiene cierto nivel de sobrepaso en régimen transitoriopero error cero de posición en régimen permanente. Por otra parte, se aprecia que el sistema tiene un tiempode estabilización de unos cuatro segundos, lo cual indica que la constante de tiempo del sistema en lazocerrado es de un segundo aproximadamente. El aspecto a resaltar acá es que se comprueba que el sistemaes controlable en lazo cerrado a pesar de que es inestable en lazo abierto.
En la Figura 21, se aprecian las velocidades que desarrolla el vehículo aéreo para desplazarse enel espacio desde el punto A (0, 0, 0) hasta el punto B (5.0, 5.1, 5.2) con respecto al sistema inercial decoordenadas.
En la Figura 22, se aprecian los valores que toman los ángulos que describen la postura del vehículoen el sistema móvil de coordenadas.
En la Figura 23, se aprecian los valores de velocidad angular que experimenta el vehículo en susejes con respecto al sistema inercial de coordenadas.
En la Figura 24, se observa de manera tridimensional la trayectoria seguida por el cuatrirotor parair desde el punto A al punto B. Si bien está claro que la distancia mas corta entre dos puntos es una línearecta, con los valores definidos en las matrices Q y R, costo de funcionamiento, la trayectoria óptima paraesas consideraciones es un arco de espiral ya que solo se está penalizando las desviaciones en el eje Z.
En la Figura 25, se observan los valores de velocidad angular, en revoluciones por minuto, quedebieron experimentar los elementos finales de control, propelas o rotores, para acometer con un valor depeso en 1000 como penalización en Qz para navegar la trayectoria desde el punto A hasta el punto B.
Desde la Figura 26 hasta la Figura 31 se aprecian los resultados para la navegación de unatrayectoria compleja en la que solo se modifica la penalización en el eje Z para la matriz de costo Q.
Para el caso específico de la Figura 26, la penalización es tan baja (Qz=1) que los errores deposición son muy significativos y los esfuerzos de control (velocidad de rotación de las propelas) son tanbajos que el vehículo tiene un tiempo de estabilización mayor a 10 segundos, con lo cual ni siquiera alcanzaa llegar a los puntos de interés de la trayectoria pautada.
En cuanto a la Figura 27, se incrementa el peso en la penalización hasta un valor de 10 y si bien los
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 71 / 78

errores de posición siguen siendo significativos, el aumento en el esfuerzo de control hace que se reduzcael tiempo de estabilización con lo cual se alcanza a llegar al menos a los puntos de interés de la trayectoria.
Con relación a la Figura 28, se lleva hasta 100 el valor del peso en la penalización de Qz con lo cualse logra disminuir el error de posición y mejorar la respuesta en tiempo del sistema. Obviamente,incrementandose el esfuerzo de control.
Para el caso de la Figura 29, ahora el valor de peso en la penalización de Qz es de 1000obteniendose una reducción significativa en el error de posición con un esfuerzo de control moderado y enel cual la constante de tiempo del sistema se reduce a aproximadamente un segundo, de manera tal que elvehiculo aprovecha la inercia por efecto de la aceleración de la gravedad para alcanzar el siguiente puntode interés en la trayectoria definida.
En cuanto a la Figura 30, El valor del peso en Qz es de 10000 con lo cual la penalización por loserrores de posición es grande produciendose una reducción aún mayor en los errores de posición delvehículo pero con un incremento significativo en el esfuerzo de control que no se traduce necesariamenteen una reducción de la constante de tiempo del sistema pero si en un mayor consumo de energía. Condiciónesta que se ignora por lo establecido en la premisa de control pautada y según la cual lo importante es queel sistema se estabilice o alcance el punto de interés en el menor tiempo posible.
Con relación a la Figura 31, la penalización en Qz es la mayor de todas al utilizarse un peso convalor de 100000. Sin embargo, la reducción en el error de posición no es significativa en comparación conlos casos en que Qz=10000 o Qz=1000. Por otra parte, un Qz=100000 implica un esfuerzo de control tangrande que la velocidad de rotación de las propelas bien podría ser prohibitiva tanto por la resistenciamecánica a la tracción, como por la posibilidad de que el motor no la alcance, o por el rápido agotamientode la batería que energiza al cuadricóptero.
De los resultados obtenidos de las Figuras 29, 30, y 31 se infiere que hay una relación inversa entrelas matrices Q y R, ya que al incrementarse la penalización en Qz para que la desviación en la variable deestado de posición sea mínima, requiere a su vez de un incremento en el esfuerzo de control o acciones decontrol más enérgicas en magnitud que no necesariamente podrían ser llevadas a cabo por los elementosfinales de control.
La conjetura anterior, permite inferir que en control óptimo la principal línea de investigación debeser el establecimiento de al menos una metodología que permita definir los valores de las matrices Q y Rmas apropiados al sistema físico que se busca manipular según las premisas de control deseadas.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 72 / 78

CAPÍTULO VII
7.1. Conclusiones.
A partir de las ecuaciones de Euler fue posible desarrollar el modelo matemático que describe elcomportamiento y desempeño del cuadricóptero que se espera simular y controlar en su trayectoria devuelo.
Linealizando las ecuaciones matemáticas en un sistema de variables de estado fue posibledeterminar tanto en tiempo continuo como en tiempo discreto los rangos de las matrices de controlabilidady observabilidad, con lo cual se determinó que en ambos dominios de tiempo era posible observar lasvariables de estado del sistema aeronáutico y controlar su trayectoria de vuelo.
Utilizando el programa de análisis numérico MATLAB fue posible desarrollar el sistema desimulación, en el cual para una trayectoria cualquiera definida por n puntos de interés se controló eldesempeño del vehículo aéreo en el seguimiento de dicha trayectoria.
El hecho de que la matriz de ganancias K no sea dinámica ya que depende de los pesos en lamatrices Q y R, hace necesario probar con distintos valores de penalización según la premisa de controlbuscada con lo cual se estaría entonando al controlador para incrementar la calidad en su diseño.
La evaluación de funcionamiento del controlador LQR en una trayectoria compleja indica lodeterminante en el desempeño del vehículo aéreo que es la adecuada escogencia de los valores de lasmatrices Q y R, ya que estas determinan la conveniencia o no para el operador humano del comportamientode vuelo.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 73 / 78

[1] Descripción del helicóptero creado por Etienne Oemichen. Disponible en:http://www.aviastar.org/helicopters_eng/oemichen.php. Revisado: 06 de Junio del 2016.
[2] Descripción del helicóptero creado por George Bothezat. Disponible en:http://www.aviastar.org/helicopters_eng/bothezat.php. Revisado: 06 de Junio del 2016.
[3] S. Raza and Wail Gueaieb, Intelligent Flight Control of an Autonomous Quadrotor, MotionControl, InTech, University of Ottawa, Canada, 2010. Disponible en:http://cdn.intechopen.com/pdfs/6587/intech-intelligent_flight_control_of_an_autonomous_quadrotor.pdf.Revisado: 06 de Junio del 2016.
[4] Eduard Santamaria , Florian Segor, Igor Tchouchenkov, Rapid Aerial Mapping with MultipleH e t e r o g e n e o u s U n m a n n e d V e h i c l e s . D i s p o n i b l e e n :http://www.iscramlive.org/ISCRAM2013/files/211.pdf. Revisado: 06 de Junio del 2016.
[5] Dron para rescate marítimo. Disponible en: http://www.wired.co.uk/article/iranian-rescue-robot.Revisado: 06 de Junio del 2016.
[6] Alex Kushleyev, Daniel Mellinger, Vijay Kumar, GRASP Lab, University of Pennsylvania. ASwarm of Nano Quadrotors. Disponible en: http://www.youtube.com/watch?v=YQIMGV5vtd4.Revisado: 06 de Junio del 2016.
[7] Hongning Hou, Jian Zhuang, Hu Xia, Guanwei Wang, and Dehong Yu. A simple controller ofminisize quad-rotor vehicle. In Mechatronics and Automation (ICMA), 2010 InternationalConference on, pages 1701-1706, 2010.
[8] Jinhyun Kim, Min-Sung Kang, and Sangdeok Park. Accurate modeling and robust hovering controlfor a quadrotor vtol aircraft. Journal of Intelligent and Robotic Systems, 57(1-4):9-26, 2010. ISSN0921-0296. doi: 10.1007/s10846-009-9369-z. URL http://dx.doi.org/10.1007/s10846-009-9369-z.
[9] Randal W. Beard. Quadrotor Dynamics and Control. Lecture notes. Brigham Young University.Disponible en: http://scholarsarchive.byu.edu/cgi/viewcontent.cgi?article=2324&context=facpub.Revisado: 06 de Junio del 2016.
[10] Teppo Luukkonnen, Modelling and control of quadrocopter, Independent research project in appliedmathematics, Aalto Universi ty, Espoo, Finland 2011. Disponible en:http://sal.aalto.fi/publications/pdf-files/eluu11_public.pdf. Revisado: 06 de Junio del 2016.
[11] Samir Bouabdallah, Roland Siegwart. Full Control of a Quadrotor. Disponible en:https://e-collection.library.ethz.ch/eserv.php?pid=eth:7848&dsID=eth-7848-01.pdf. Revisado: 06de Junio del 2016.
[12] G., Hoffmann. Huang, S. Waslander, and C. Tomlin, “Quadrotor helicopter flight dynamics and
REFERENCIAS BIBLIOGRÁFICAS
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 74 / 78

control: Theory and experiment,” in Proc. of the AIAA Guidance, Navigation, and ControlConference, 2007, pp. 1–20.
[13] R. Goela, S. Shahb, N. Guptac, and N. Ananthkrishnanc, “Modeling, simulation and flight testingof an autonomous quadrotor,” Proceedings of ICEAE, 2009.
[14] B. Erginer and E. Altug, “Modeling and pd control of a quadrotor vtol vehicle,” in IntelligentVehicles Symposium, 2007 IEEE. IEEE, 2007, pp. 894–899.
[15] R.V. Jategaonkar. Flight vehicle system identification: a time domain methodology. AmericanInstitute of Aeronautics and Astronautics, 2006.
[16] I.D. Cowling, O.A. Yakimenko, J.F. Whidborne, and A.K. Cooke. A prototype of an autonomouscontroller for a quadrotor uav. In European Control Conference, pages 1–8, 2007.
[17] S. Bouabdallah, A. Noth, and R. Siegwart. PID vs LQ control techniques applied to an indoor microquadrotor. In International Conference on Intelligent Robots and Systems 2004, volume 3, pages2451 – 2456 vol.3, 2004.
[18] P. Pounds, R. Mahony, and P. Corke. Modelling and control of a quadrotor robot. In Australasianconference on robotics and automation 2006, Auckland, NZ, 2006.
[19] I. Cowling, J. Whidborne, and A. Cooke, “Optimal trajectory planning and lqr control for aquadrotor uav,” in Proceedings of the International Conference Control–2006, Glasgow, Scotland,vol. 30, 2006.
[20] L. Minh and C. Ha, “Modeling and control of quadrotor mav using vision-based measurement,” inStrategic Technology (IFOST), 2010 International Forum on. IEEE, 2010, pp. 70–75.
[21] Y. Al-Younes, M. Al-Jarrah, and A. Jhemi, “Linear vs. nonlinear control techniques for a quadrotorvehicle,” in Mechatronics and its Applications (ISMA), 2010 7th International Symposium on.IEEE, 2010, pp. 1–10.
[22] S. Bouabdallah, “Design and control of quadrotors with application to autonomous flying” Ph.D.dissertation, Federal Polytechnic School of Lausanne, 2007.
[23] D. Mellinger, Q. Lindsey, M. Shomin, and V. Kumar, “Design, modeling, estimation and controlfor aerial grasping and manipulation,” in Intelligent Robots and Systems (IROS), 2011 IEEE/RSJInternational Conference on. IEEE, 2011, pp. 2668–2673.
[24] E. Altug, J. Ostrowski, and R. Mahony, “Control of a quadrotor helicopter using visual feedback,”in Robotics and Automation, 2002. Proceedings. ICRA’02. IEEE International Conference on, vol.1. IEEE, 2002, pp. 72–77.
[25] T. Madani and A. Benallegue, “Control of a quadrotor mini-helicopter via full state backsteppingtechnique,” in Decision and Control, 2006 45th IEEE Conference on. IEEE, 2006, pp. 1515–1520.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 75 / 78

[26] T. Madani and A. Benallegue. Backstepping Control for a Quadrotor Helicopter. In IntelligentRobots and Systems, 2006 IEEE/RSJ International Conference on, pages 3255 –3260, 2006.
[27] S. Bouabdallah and R. Siegwart. Backstepping and sliding-mode techniques applied to an indoormicro quadrotor. In International Conference on Robotics and Automation 2005, pages 2247 –2252, april 2005.
[28] R. Xu and U. Ozguner. Sliding mode control of a quadrotor helicopter. In Decision and Control,2006 45th IEEE Conference on, pages 4957 –4962, dec. 2006.
[29] D. Lee, H. Jin Kim, and S. Sastry. Feedback linearization vs. adaptive sliding mode control for aquadrotor helicopter. International Journal of Control, Automation and Systems, 7(3):419–428,2009.
[30] A. Mokhtari, N. M’Sirdi, K. Meghriche, and A. Belaidi, “Feedback linearization and linear observerfor a quadrotor unmanned aerial vehicle,” Advanced Robotics, vol. 20, no. 1, pp. 71–91, 2006.
[31] A. Das, K. Subbarao, and F. Lewis, “Dynamic inversion with zero-dynamics stabilisation forquadrotor control,” Control Theory & Applications, IET, vol. 3, no. 3, pp. 303–314, 2009.
[32] M. Hehn and R. DAndrea, “Quadrocopter trajectory generation and control,” in Proceedings of theIFAC world congress, 2011.
[33] B. Whitehead and S. Bieniawski. Model Reference Adaptive Control of a Quadrotor UAV. InGuidance Navigation and Control Conference 2010, Toronto, Ontario, Canada, 2010. AIAA.
[34] M.Huang, B.Xian, C.Diao, K.Yang, and Y.Feng. Adaptive tracking control of underactuatedquadrotor unmanned aerial vehicles via backstepping. In American Control Conference (ACC),2010, pages 2076 –2081, 30 2010-july 2 2010.
[35] W. Zeng, B. Xian, C. Diao, Q. Yin, H. Li, and Y. Yang. Nonlinear adaptive regulation control ofa quadrotor unmanned aerial vehicle. In Control Applications (CCA), 2011 IEEE InternationalConference on, pages 133 –138, 2011.
[36] J.J. Craig, P. Hsu, and S.S. Sastry. Adaptive control of mechanical manipulators. The InternationalJournal of Robotics Research, 6(2):16, 1987.
[37] S. Bouabdallah, P. Murrieri, and R. Siegwart. Design and control of an indoor micro quadrotor. InRobotics and Automation, 2004. Proceedings. ICRA’04. 2004 IEEE International Conference on,volume 5.
[38] Becker, M. ; Bouabdallah, S. ; Siegwart, R. (2006). Desenvolvimento de um Controlador de Desviode Obstáculos para um Mini-Helicóptero Quadrirotor Autônomo 1ª Fase: Simulação. In proc. ofCBA 2006 - Congresso Brasileiro de Automática, Salvador - BA, Brazil, Vol. 1. pp. 1201-1206.
[39] P. Pounds, R. Mahony, J. Gresham, P. Corke, and J. Roberts. Towards Dynamically-FavourableQuad-Rotor Aerial Robots. 2004.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 76 / 78

[40] P. Pounds, R. Mahony, and P. Corke. Modelling and Control of a Quad-Rotor Robot. 2006.
[41] A. Mokhtari, A. Benallegue, and B. Daachi. Robust feedback linearization and gh8 controller fora quad rotor unmanned aerial vehicle. Journal of Electrical Engineering, 57(1):20–27, 2006.
[42] G.P. Tournier, M. Valenti, J.P. How, and E. Feron. Estimation and control of a quadrotor vehicleusing monocular vision and moirè patterns. 2006.
[43] E. Courses and T. Surveys. Robust low altitude behavior control of a quadrotor rotorcraft throughsliding modes. pages 1–6, 2007.
[44] Katie Miller. Path tracking control for quadrotor helicopters. July 2008.
[45] Gjioni E. AbouSleiman R., Korff D. and Yang H. The oakland university unmanned aerialquadrotor system. 2008.
[46] J. Gordon Leishman. A History of Helicopter Flight. Disponible en: http://itlims.meil.pw.edu.pl/zsis/pomoce/WTLK/ENG/Sup/A_History_of_Helicopter_Flight.pdf.Revisado: 25 de Abril del 2016.
[47] B e l l B o e i n g Q u a d T i l t R o t o r . D i s p o n i b l e e n :https://en.wikipedia.org/wiki/Bell_Boeing_Quad_TiltRotor. Revisado: 25 de Abril del 2016.
[48] B e l l Q T R Q u a d T i l t r o t o r p r o j e c t . D i s p o n i b l e e n :http://www.aviastar.org/helicopters_eng/bell_qtr.php. Revisado: 25 de Abril del 2016.
[49] D i v e r s i t y i n d e s i g n . D i s p o n i b l e e n :http://www.boeing.com/news/frontiers/archive/2006/december/i_ids03.pdf. Revisado: 25 de Abrildel 2016.
[50] M o l l e r S k y c a r M 4 0 0 , J a n u a r y 2 0 0 9 . D i s p o n i b l e e n:http://en.wikipedia.org/wiki/Moller_Skycar_M400. Revisado: 25 de Abril del 2016.
[51] Moller M200G Volantor. Disponible en: https://en.wikipedia.org/wiki/Moller_M200G_Volantor.Revisado: 25 de Abril del 2016.
[52] Beard, Randal, "Quadrotor Dynamics and Control Rev 0.1" (2008). All Faculty Publications. Paper1325. Disponible en: http://scholarsarchive.byu.edu/facpub/1325. Revisado: 28 de Junio del 2016.
[53] B. Siciliano, L. Sciavicco, L. Villani, G. Oriolo. Robotics. McGraw-Hill.
[54] D. Lee, T. Burg, D. Dawson, D. Shu, B. Xian, and E. Tatlicioglu, “Robust tracking control of anunderactuated quadrotor aerial-robot based on a parametric uncertain model”, in Systems, Man andCybernetics, 2009. SMC 2009. IEEE International Conference on, 2009, pp. 3187–3192.
[55] Katsuhiko Ogata. Ingeniería de control moderna. Pearson Education S.A, Madrid 2010. ISBN: 978-84-8322-660-5
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 77 / 78

[56] Julio H. Braslavsky. Introducción al control óptimo. Lecturer notes 2001. Disponible en:http://www.eng.newcastle.edu.au/~jhb519/teaching/caut2/clases/Cap9.pdf. Revisado: 05 de Juliodel 2016.
[57] John S. Bay. Fundamentals of Linear State Space Systems. WCB/McGraw-Hill, 1999.
[58] Green, Limebeer: Linear Robust Control.
[59] Van Willigenburg L.G., De Koning W.L. (1999). «Optimal reduced-order compensators fortime-varying discrete-time systems with deterministic and white parameters». Automatica 35:129-138.
[60] F. Arias. El proyecto de investigación. Guía para su elaboración. Episteme, Caracas, 1999.
[61] M. Balestrini. Cómo se elabora el proyecto de investigación. Editorial BL Consultores Asociados,Caracas, 1997.
[62] J. Padrón. Paradigmas de investigación en ciencias sociales. Disponible en:http://padron.entretemas.com/paradigmas.htm. Revisado: 20 de Julio del 2016.
[63] G. Done and D. Balmford, Bramwell’s Helicopter Dynamics. Oxford Butterworth-Heinemann,2001.
[64] P. Mullhaupt, Analysis and Control of Underactuated Mechanical Nonminimum-phase Systems.PhD thesis, EPFL, 1999.
[65] H. Goldstein et al., Classical Mechanics. Addison Wesley, 2002.
[66] B. Etkin and L. Reid, Dynamics of Flight: Stability and Control. John Wiley and Sons, 1996.
[67] D. Lee, T. Burg, D. Dawson, D. Shu, B. Xian, and E. Tatlicioglu, “Robust tracking control of anunderactuated quadrotor aerial-robot based on a parametric uncertain model”, in Systems, Man andCybernetics, 2009. SMC 2009. IEEE International Conference on, 2009, pp. 3187–3192.
[68] A. Das, K. Subbarao, and F. Lewis. Dynamic inversion with zero-dynamics stabilisation forquadrotor control. Control Theory & Applications, IET, 3(3):303–314, 2009.
[69] OGATA, KATSUHIKO. Ingeniería de Control Moderna. 3ra edición. Prentice-HallHispanoamericana, S.A.. 1998.
[70] M.Murray. Optimization-Based Control. California Institute of Technology.
Propuesta para el Trabajo de Grado de Maestría, 07 Mar 2017. 78 / 78


















