Tarea subir final
20
-
Upload
julfel2000 -
Category
Education
-
view
118 -
download
0
Transcript of Tarea subir final


LEGO MINDSTORMS EDUCATIONes la nueva generación en robótica educacional, que permite a los estudiantes descubrir la ciencia, la tecnología y las matemáticas de una forma divertida, cautivante y con participación activa. Combinando del poder del sistema de construcción de LEGO con la tecnología de LEGO MINDSTORMS Education, los equipos de estudiantes pueden diseñar, construir, programar y poner a prueba a los robots. Trabajando juntos en proyectos de ingeniería guiados y abiertos, los miembros del equipo desarrollan la creatividad y las habilidades para resolver problemas al mismo tiempo que otros conocimientos importantesde matemáticas y ciencia. Los estudiantes también adquieren más habilidades en comunicación, organización e investigación, que los ayuda a prepararse para el éxito futuro en niveles más altos de educación y en el entorno laboral.
LA TECNOLOGIA DEL FUTURO,AHORALego mindstorms education contiene un avanzado ladrillo NXT de 32 bits controlado por ordenador, servomotores interactivos, sensores de sonido, ultrasónicos y de otros tipos, ladrillos de comunicación Bluetooth, múltiples funciones de descarga y registro de datos. El software LEGO MINDSTORMS Education NXT basado en iconos está construido sobre el software deLabVIEW de National Instruments, un estándar de la industria con aplicaciones en muchos campos de la ingeniería y la investigación.
ACTIVIDADES CURRICULARES,INSPIRACION,AYUDAEl sitio Web de Lego mindstorms education www.MINDSTORMSeducation.comes su recurso principal para obtener actividades curriculares, capacitación,información sobre productos y ayuda. Nuestros socios proporcionan una sólidared de información, asesoramiento técnico y también apoyo a los profesores.Carnegie Mellon Robotics Academy es nuestro socio para desarrollar materialesy actividades curriculares. Tufts University Center for Engineering EducationOutreach (CEEO) es nuestro socio para el desarrollo del producto, talleres yconferencias. Además, nuestros socios comerciales ofrecen el respaldo local.Si está interesado en un desafío competitivo, visite nuestro sitio Web para conocermás sobre el concurso FIRST LEGO LEAGUE.
ConstruirConstruya su robot. En esta guía delusuario se proporcionan instruccionesespecíficas para construir un robot.También hay instrucciones de construcciónpara el mismo robot en la Guía de montajedel NXT en el equipo de base n° 9797 yen el Robot Educator, que es parte delsoftware LEGO® MINDSTORMS®Education NXT.
ProgramarPrograme su robot utilizando el softwareLEGO MINDSTORMS Education NXT. Seincluyen muchos ejemplos en la parteRobot Educator del software. Descarguesu programa al ladrillo NXT con la conexióninalámbrica Bluetooth o con el cable USB.
Poner a pruebaEjecute su programa. ¿Qué ocurre? ¿Surobot actuó como lo esperaba? Si no lohizo, ajuste su robot o su programa einténtelo nuevamente.
Comience aquíSi usted prefiere comenzar por construir y programar con lapantalla del ladrillo NXT sin un ordenador, consulte la Guía demontaje del NXT.


Batería recargableLa batería recargable encaja en la parte inferior delNXT. Para instalar la batería recargable, mueva lapestaña de plástico del lado con su pulgar para abrir la parte trasera. El NXT viene con una cobertura extra que se usacuando se utilizan 6 baterías tamaño AA. (Consultelos detalles en la página siguiente). Sosteniendo la batería recargable, presione haciaadentro la pestaña de plástico y coloque la batería en su lugar.Instalación de las baterías en el NXT Para recargar la batería, conecte un extremo del cable del adaptador de corriente (se vende por separado) en la toma de carga justo debajo de los puertos de entrada del NXT. Conecte el otro extremo del cable del adaptador de corriente al enchufe de pared. También puede cargarse la batería cuando no esté insertada en el NXT.• La luz indicadora verde se enciende cuando eladaptador de corriente está conectado al NXT.• La luz roja se enciende cuando la batería se está cargando.La luz roja se apaga cuando la batería tiene la cargacompleta.• Cargar la batería por completo requiere aproximadamentecuatro horas.• Puede utilizarse el NXT cuando se está cargando la batería.Sin embargo, de ese modo la carga requiere más tiempo.• Esta batería de polímero de iones de litio puede recargarsehasta 500 veces.
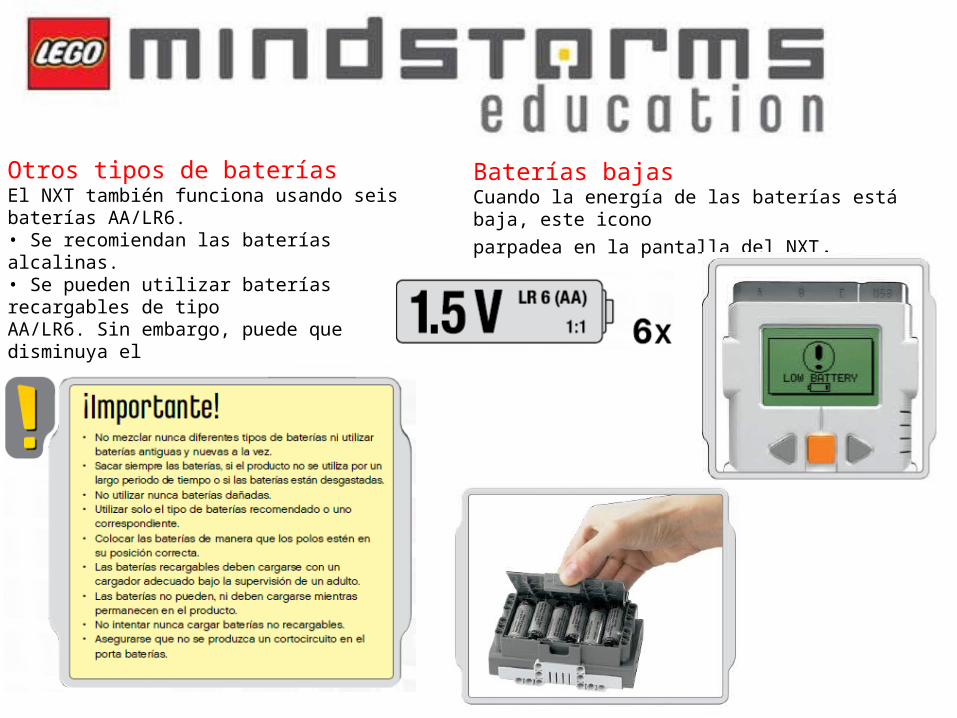
Otros tipos de bateríasEl NXT también funciona usando seis baterías AA/LR6.• Se recomiendan las baterías alcalinas.• Se pueden utilizar baterías recargables de tipoAA/LR6. Sin embargo, puede que disminuya elrendimiento de la potencia del NXT.
Baterías bajasCuando la energía de las baterías está baja, este iconoparpadea en la pantalla del NXT.
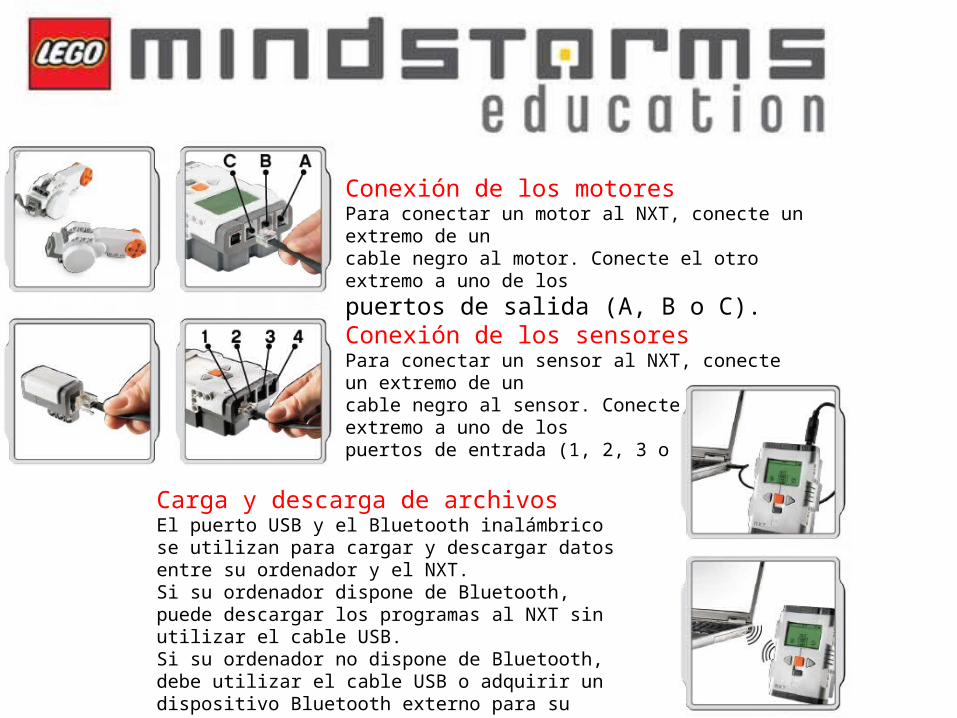
Conexión de los motoresPara conectar un motor al NXT, conecte un extremo de uncable negro al motor. Conecte el otro extremo a uno de lospuertos de salida (A, B o C).Conexión de los sensoresPara conectar un sensor al NXT, conecte un extremo de uncable negro al sensor. Conecte el otro extremo a uno de lospuertos de entrada (1, 2, 3 o 4).
Carga y descarga de archivosEl puerto USB y el Bluetooth inalámbrico se utilizan para cargar y descargar datos entre su ordenador y el NXT.Si su ordenador dispone de Bluetooth, puede descargar los programas al NXT sin utilizar el cable USB.Si su ordenador no dispone de Bluetooth, debe utilizar el cable USB o adquirir un dispositivo Bluetooth externo para su ordenador. (Lea más sobre la conexión inalámbrica Bluetooth en las páginas 37 a 46).
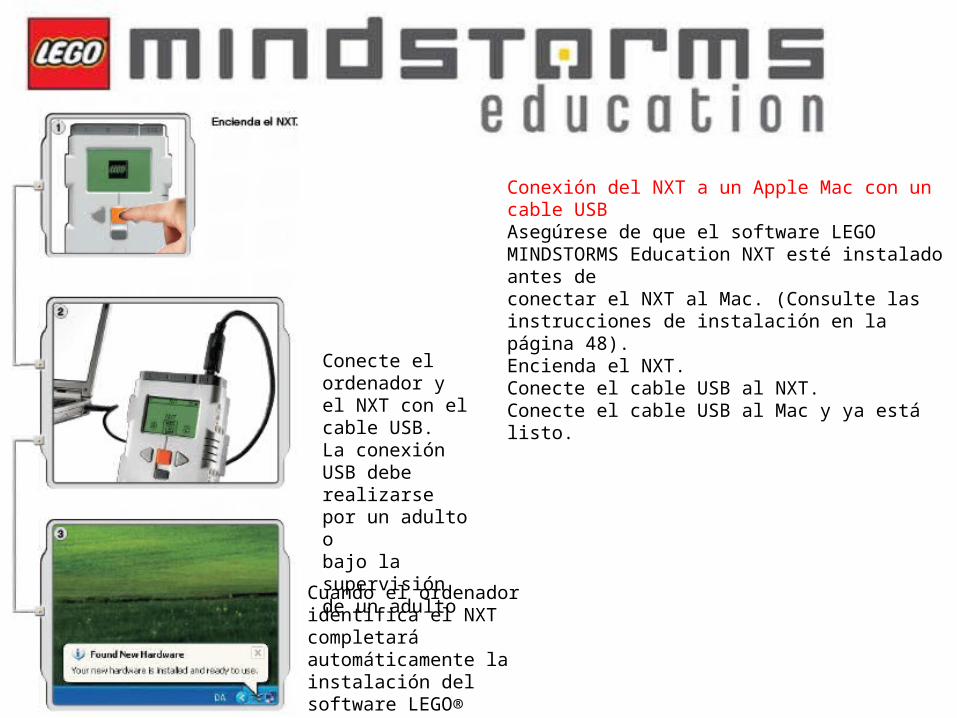
Conecte el ordenador y el NXT con el cable USB.La conexión USB debe realizarse por un adulto obajo la supervisión de un adulto
Cuando el ordenador identifica el NXT completaráautomáticamente la instalación del software LEGO®MINDSTORMS Education NXT.
Conexión del NXT a un Apple Mac con un cable USBAsegúrese de que el software LEGO MINDSTORMS Education NXT esté instalado antes deconectar el NXT al Mac. (Consulte las instrucciones de instalación en la página 48).Encienda el NXT.Conecte el cable USB al NXT.Conecte el cable USB al Mac y ya está listo.
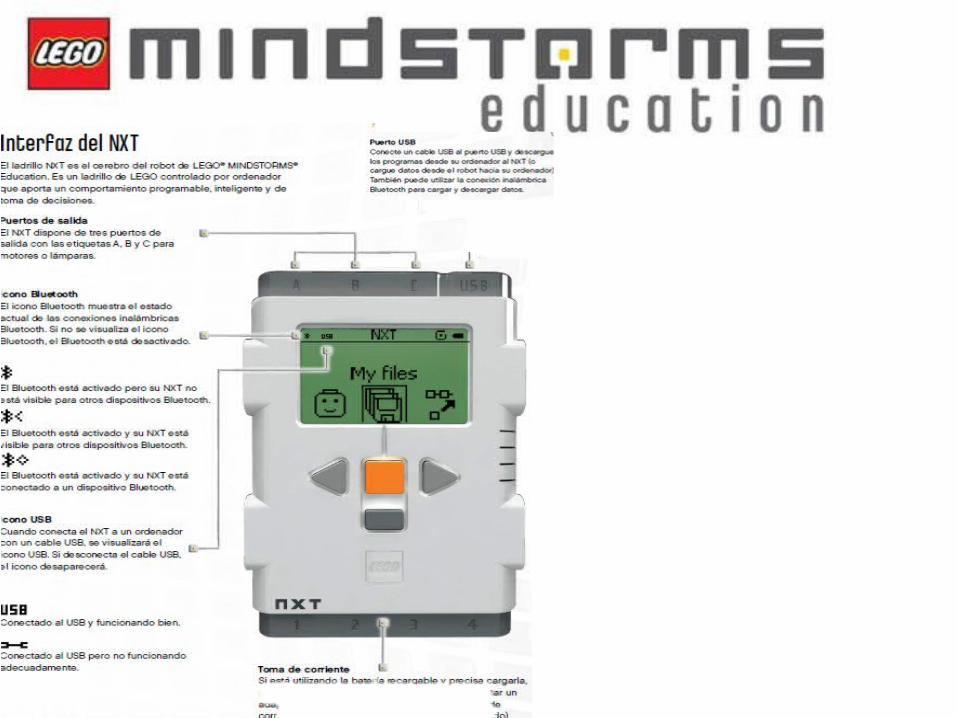
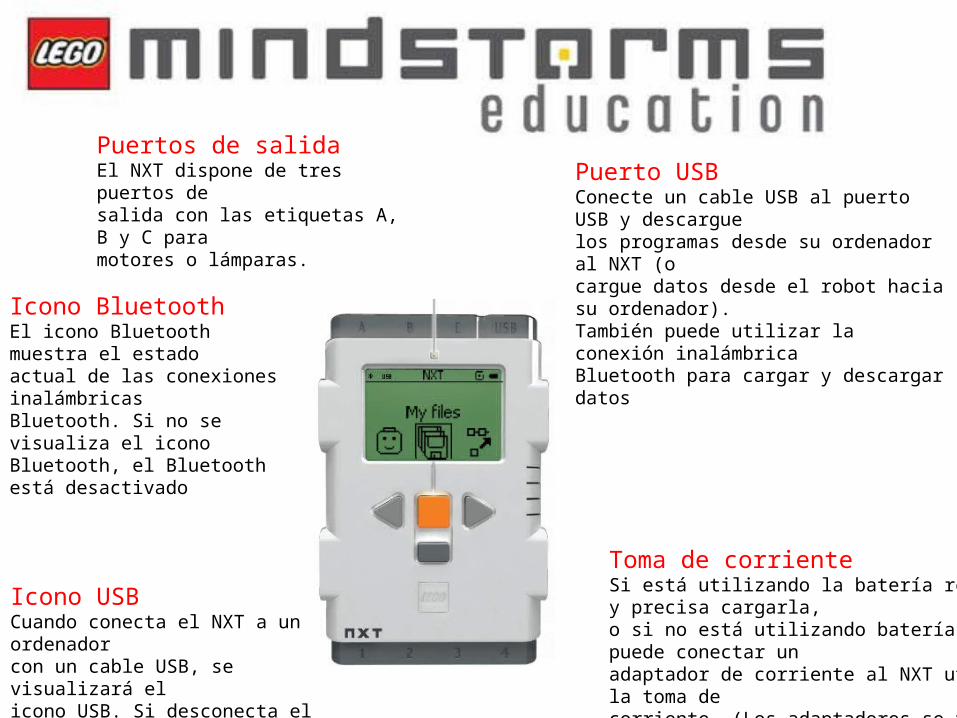
Puerto USBConecte un cable USB al puerto USB y descarguelos programas desde su ordenador al NXT (ocargue datos desde el robot hacia su ordenador).También puede utilizar la conexión inalámbricaBluetooth para cargar y descargar datos
Puertos de salidaEl NXT dispone de tres puertos desalida con las etiquetas A, B y C paramotores o lámparas.
Icono BluetoothEl icono Bluetooth muestra el estadoactual de las conexiones inalámbricasBluetooth. Si no se visualiza el iconoBluetooth, el Bluetooth está desactivado
Icono USBCuando conecta el NXT a un ordenadorcon un cable USB, se visualizará elicono USB. Si desconecta el cable USB,el icono desaparecerá.
Toma de corrienteSi está utilizando la batería recargable y precisa cargarla,o si no está utilizando baterías 6AA, puede conectar unadaptador de corriente al NXT utilizando la toma decorriente. (Los adaptadores se venden por separado).
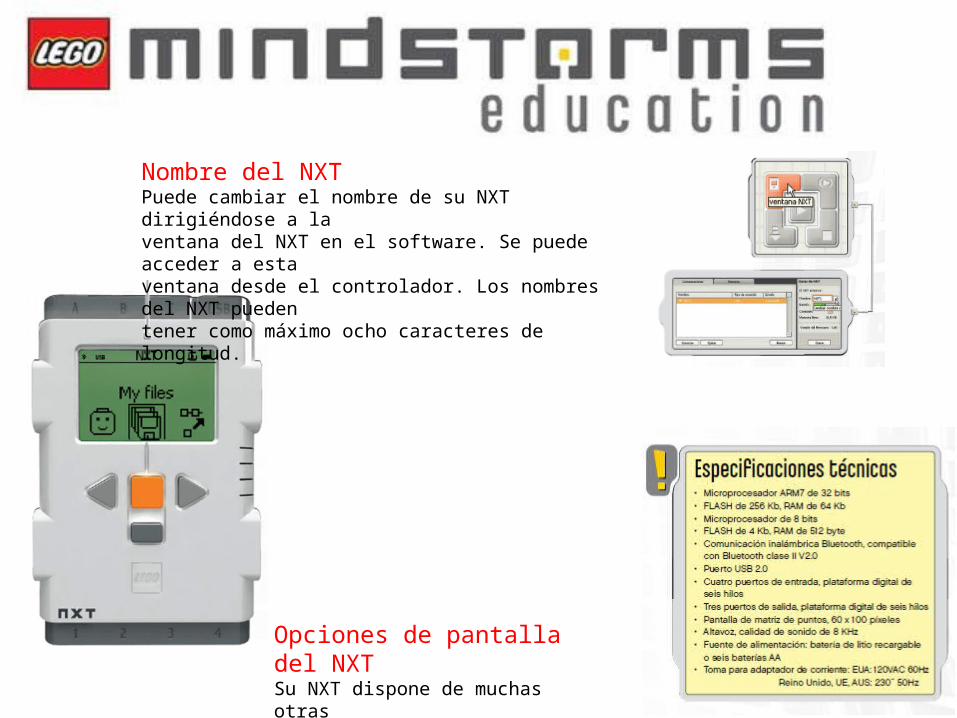
Nombre del NXTPuede cambiar el nombre de su NXT dirigiéndose a laventana del NXT en el software. Se puede acceder a estaventana desde el controlador. Los nombres del NXT puedentener como máximo ocho caracteres de longitud.
Opciones de pantalla del NXTSu NXT dispone de muchas otrasfunciones. Lea más sobre ellas enlas páginas siguientes.
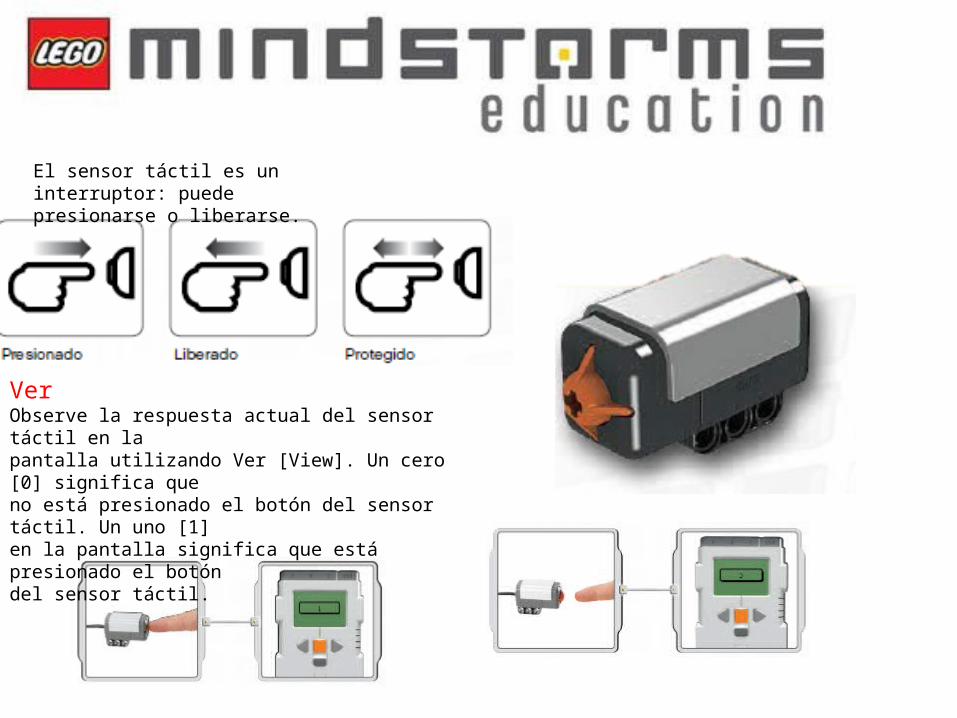
El sensor táctil es un interruptor: puede presionarse o liberarse.
VerObserve la respuesta actual del sensor táctil en lapantalla utilizando Ver [View]. Un cero [0] significa queno está presionado el botón del sensor táctil. Un uno [1]en la pantalla significa que está presionado el botóndel sensor táctil.
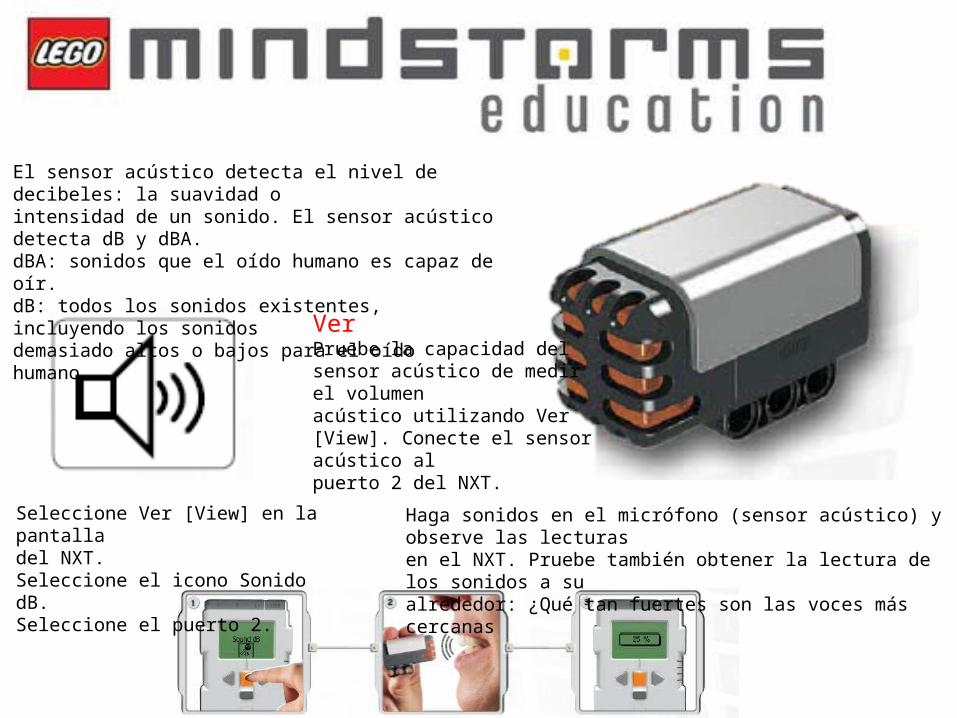
El sensor acústico detecta el nivel de decibeles: la suavidad ointensidad de un sonido. El sensor acústico detecta dB y dBA.dBA: sonidos que el oído humano es capaz de oír.dB: todos los sonidos existentes, incluyendo los sonidosdemasiado altos o bajos para el oído humano.
VerPruebe la capacidad del sensor acústico de medir el volumenacústico utilizando Ver [View]. Conecte el sensor acústico alpuerto 2 del NXT.
Seleccione Ver [View] en la pantalladel NXT.Seleccione el icono Sonido dB.Seleccione el puerto 2.
Haga sonidos en el micrófono (sensor acústico) y observe las lecturasen el NXT. Pruebe también obtener la lectura de los sonidos a sualrededor: ¿Qué tan fuertes son las voces más cercanas
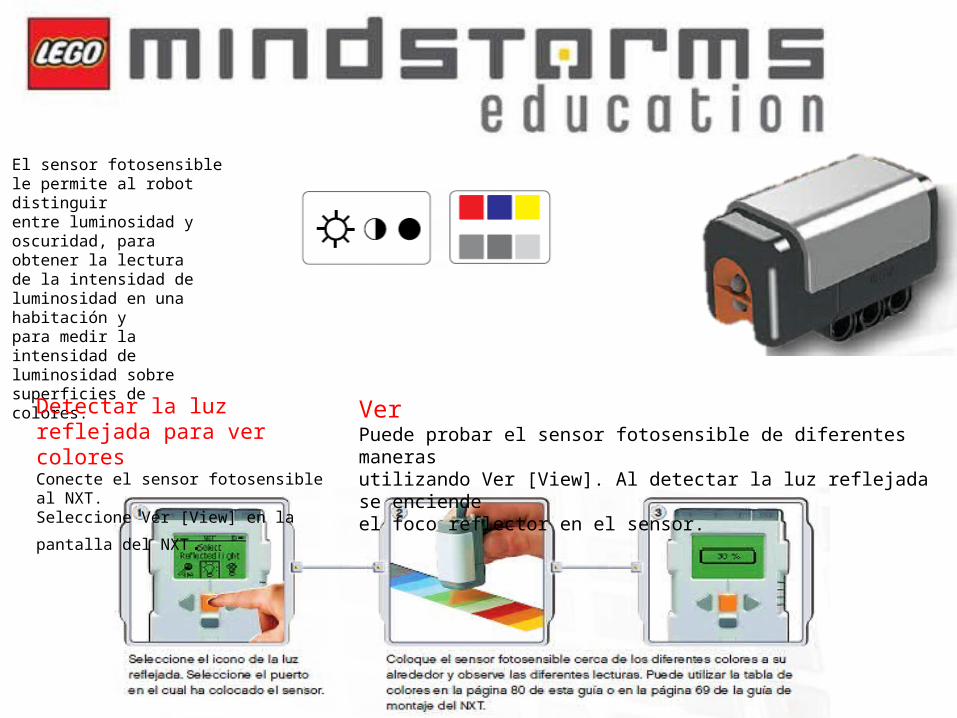
El sensor fotosensible le permite al robot distinguirentre luminosidad y oscuridad, para obtener la lecturade la intensidad de luminosidad en una habitación ypara medir la intensidad de luminosidad sobresuperficies de colores.
Detectar la luz reflejada para ver coloresConecte el sensor fotosensible al NXT.Seleccione Ver [View] en la pantalla del
NXT.
VerPuede probar el sensor fotosensible de diferentes manerasutilizando Ver [View]. Al detectar la luz reflejada se enciendeel foco reflector en el sensor.

El sensor ultrasónico le permite al robot ver yreconocer objetos, evitar obstáculos, medir distanciasy detectar movimiento.El sensor ultrasónico utiliza el mismo principiocientífico que los murciélagos: mide la distanciacalculando el tiempo que demora una onda de sonidoen golpear un objeto y volver, al igual que un eco
VerPruebe la capacidad del sensor ultrasónico de medirla distancia utilizando Ver [View].Conecte el sensor ultrasónico al NXT.Seleccione Ver [View] en la pantalla del NXT.

Se puede encender y apagar las lámparas,para crear patrones intermitentes de luz.También pueden utilizarse para activar el sensorfotosensible, para mostrar que un motor estáencendido o para indicar el estado de un sensor.También puede utilizarlas para darle vitalidad a los“ojos” de su robot u otras funciones.Utilice los cables conversores para conectar las lámparas alos puertos de salida A, B o C. Se incluyen tres lámparas ytres cables conversores.
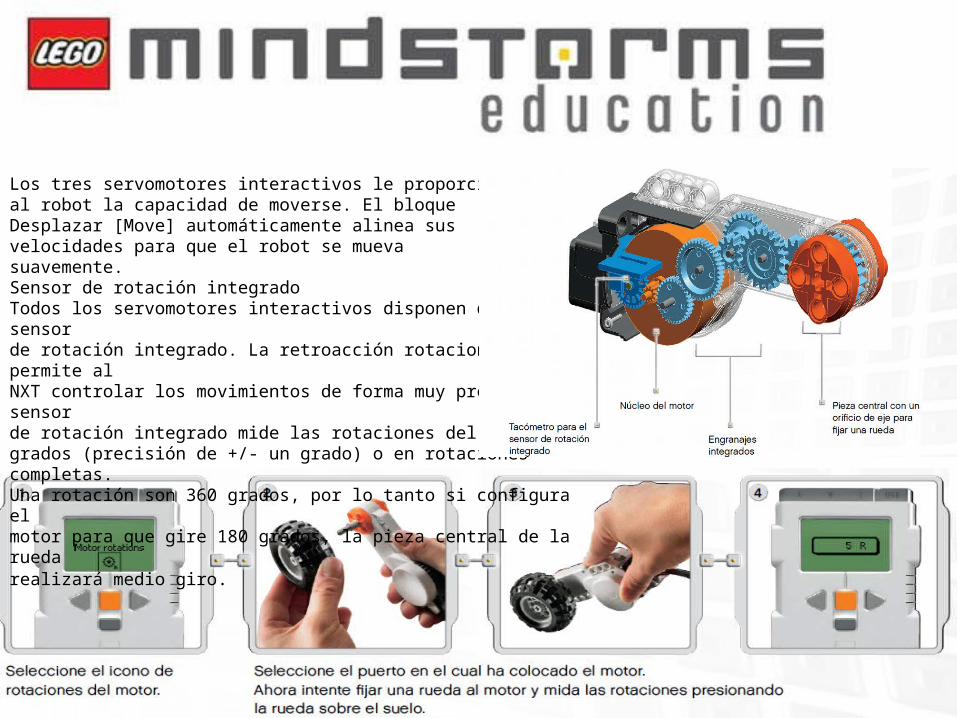
Los tres servomotores interactivos le proporcionanal robot la capacidad de moverse. El bloqueDesplazar [Move] automáticamente alinea susvelocidades para que el robot se muevasuavemente.Sensor de rotación integradoTodos los servomotores interactivos disponen de un sensorde rotación integrado. La retroacción rotacional le permite alNXT controlar los movimientos de forma muy precisa. El sensorde rotación integrado mide las rotaciones del motor engrados (precisión de +/- un grado) o en rotaciones completas.Una rotación son 360 grados, por lo tanto si configura elmotor para que gire 180 grados, la pieza central de la ruedarealizará medio giro.