tema2.pdf
43
Tema 2: Campos tensoriales y operadores diferenciales. 1 Sistemas de coordenadas 1.1 Coordenadas cartesianas Sea {~e 1 ,~e 2 ,~e 3 } = { ~ i, ~ j, ~ k} una base ortonormal de V . Todo punto P de R 3 tiene asociado un vector de posici´ on ~ r P que puede ser representado por sus componentes ~ r P = x P ~ i + y P ~ j + z P ~ k. Definici´ on 1 Llamaremos coordenadas cartesianas de un punto P ∈ R 3 a las cantidades (x P ,y P ,z P ) que definen su vector de posici´ on. Cuando hablemos de un punto gen´ erico de R 3 notaremos su vector de posici´on ~ r = x ~ i + y ~ j + z ~ k, y sus componentes cartesianas (x, y, z ), es decir sin hacer referencia al punto. Para simplificar la notaci´ on a menudo escribiremos las coordenadas cartesianas en la forma (x, y, z )=(x 1 ,x 2 ,x 3 ) que permite escribir el vector de posici´on en forma abreviada ~ r = x i ~e i . Definici´ on 2 Llamaremos l´ ıneas coordenadas asociadas a las coordenadas cartesianas a las rectas que se obtienen al fijar dos de las tres coordenadas y hacer variar la tercera. Es f´ acil comprobar que las l´ ıneas coordenadas son rectas paralelas a alguno de los tres ejes coordenados. Adem´ as, dado un punto P existen tres l´ ıneas coordenadas que pasan por ´ el. Son las tres rectas paralelas a los tres ejes coordenados que pasan por P . 1.2 Coordenadas cil´ ındricas Todo punto de R 3 tiene asociado un vector de posici´ on ~ r que puede ser representado por las siguientes cantidades 1. Longitud de la proyecci´ on ortogonal del vector de posici´ on del punto sobre el plano z = 0, que llamaremos ρ 2. El ´ angulo que forma dicha proyecci´ on y el semieje positivo OX , que llamaremos θ 1
Transcript of tema2.pdf

Tema 2: Campos tensoriales yoperadores diferenciales.
1 Sistemas de coordenadas
1.1 Coordenadas cartesianas
Sea {~e1, ~e2, ~e3} = {~i,~j,~k} una base ortonormal de V . Todo punto P de R3 tiene asociadoun vector de posicion ~rP que puede ser representado por sus componentes
~rP = xP~i+ yP~j + zP~k.
Definicion 1 Llamaremos coordenadas cartesianas de un punto P ∈ R3 a las cantidades(xP , yP , zP ) que definen su vector de posicion.
Cuando hablemos de un punto generico de R3 notaremos su vector de posicion
~r = x~i+ y~j + z~k,
y sus componentes cartesianas (x, y, z), es decir sin hacer referencia al punto.Para simplificar la notacion a menudo escribiremos las coordenadas cartesianas en la
forma (x, y, z) = (x1, x2, x3) que permite escribir el vector de posicion en forma abreviada
~r = xi~ei.
Definicion 2 Llamaremos lıneas coordenadas asociadas a las coordenadas cartesianas alas rectas que se obtienen al fijar dos de las tres coordenadas y hacer variar la tercera.
Es facil comprobar que las lıneas coordenadas son rectas paralelas a alguno de los tresejes coordenados.
Ademas, dado un punto P existen tres lıneas coordenadas que pasan por el. Son lastres rectas paralelas a los tres ejes coordenados que pasan por P .
1.2 Coordenadas cilındricas
Todo punto de R3 tiene asociado un vector de posicion ~r que puede ser representado porlas siguientes cantidades
1. Longitud de la proyeccion ortogonal del vector de posicion del punto sobre el planoz = 0, que llamaremos ρ
2. El angulo que forma dicha proyeccion y el semieje positivo OX, que llamaremos θ
1

copia.jpg
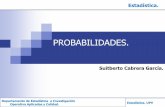
Figure 1: Coordenadas cilındricas
3. La coordenada cartesiana respecto al eje OZ, que llamaremos z
Definicion 3 Llamaremos coordenadas cilındricas de un punto P ∈ R3 a las cantidades(ρ, θ, z) que definen su vector de posicion.
En principio, las coordenadas cilındricas tienen sentido si ρ ≥ 0, θ ∈ R y z ∈ R.Sin embargo, si tomamos todos estos valores obtenemos varias representaciones del mismopunto. Por ejemplo las coordenadas cilındricas (1, 0, 1) y (1, 2π, 1) representan el mismopunto. Lo mismo pasa con (0, 0, 1) y (0, 1, 1).
Para evitar esta representacion multiple vamos a suponer ρ > 0 y θ ∈ (0, 2π). Esto dejaalgunos puntos de R3 fuera, como los del eje OZ, que no admiten una buena representacionen coordenadas cilındricas. Diremos que el eje OZ es singular para este sistema de coor-denadas. Otros puntos, como los del semiplano y = z = 0, x > 0 pueden representarsesin mayor dificultad tomando sımplemente otra region angular para θ, como por ejemploθ ∈ (−π, π).
Proposicion 4 Las relaciones que permiten pasar de coordenadas cartesianas a cilındricasy viceversa son:
x = ρ cos θy = ρ sin θz = z
,
ρ =√x2 + y2
θ = atan (y/x)z = z
Definicion 5 Llamaremos lıneas coordenadas asociadas a las coordenadas cilındricas a lascurvas que se obtienen al fijar dos de las tres coordenadas y hacer variar la tercera.
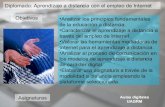
Si fijamos ρ = ρ0 y θ = θ0, y dejamos variar z obtenemos rectas paralelas a OZ quepasan por (ρ0, θ0, 0) para diferentes valores de ρ0 y θ0. Si fijamos ρ = ρ0 y z = z0 obtenemoscircunferencias alrededor del eje OZ que pasan por (ρ0, 0, z0). Por ultimo, si fijamos θ = θ0y z = z0 obtenemos semirectas que se inician en el origen y pasan por el punto (1, θ0, z0).
2

copia.jpg copia.jpg copia.jpg
Figure 2: Lıneas coordenadas asociadas a las coordenadas cilındricas
1.3 Coordenadas esfericas
Todo punto de R3 tiene asociado un vector de posicion ~r que puede ser representado porlas siguientes cantidades
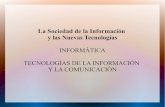
1. Longitud del vector de posicion del punto, que llamaremos r
2. El angulo que forma el eje OZ con el vector de posicion del punto, que llamaremosϕ (colatitud)
3. El angulo que forma la proyeccion ortogonal del vector de posicion y el semiejepositivo OX, que llamaremos θ
copia.jpg
Figure 3: Coordenadas esfericas
Definicion 6 Llamaremos coordenadas esfericas de un punto P ∈ R3 a las cantidades(r, ϕ, θ) que definen su vector de posicion.
En principio, las coordenadas esfericas tienen sentido si r ≥ 0, ϕ ∈ R y θ ∈ R.Sin embargo, al igual que con las coordenadas cilındricas, para evitar esta representacion
3

multiple vamos a suponer r > 0, ϕ ∈ (0, π) y θ ∈ (0, 2π). Diremos ademas que el origen esun punto singular para este sistema de coordenadas.
Proposicion 7 Las relaciones que permiten pasar de coordenadas cartesianas a esfericasy viceversa son:
x = r sinϕ cos θy = r sinϕ sin θz = r cosϕ
,
r =
√x2 + y2 + z2
θ = atan (y/x)
ϕ = atan (√x2 + y2/z)
Definicion 8 Llamaremos lıneas coordenadas asociadas a las coordenadas esfericas a lascurvas que se obtienen al fijar dos de las tres coordenadas y hacer variar la tercera.
2 Coordenadas curvilıneas
2.1 Definicion y ejemplos
Definicion 9 Sean (x1, x2, x3) las coordenadas cartesianas respecto a un sistema ortonor-mal {~e1, ~e2, ~e3} y D ⊂ R3 un conjunto abierto. Diremos que la transformacion
F : D 7−→ R3
(x1, x2, x3) F (x1, x2, x3),
dada porF (x1, x2, x3) = (x1(x
1, x2, x3), x2(x1, x2, x3), x3(x
1, x2, x3)),
define un sistema de coordenadas curvilıneas en D si se verifca:
1. F es diferenciable con diferencial continua, es decir las funciones xi, que expresanlas coordenadas cartesianas respecto a las curvilıneas (x1, x2, x3), admiten derivadascontinuas en D.
2. La funcion F es inyectiva en D y por tanto admite una funcion inversa F−1 sobre laimagen de F .
3. La inversa F−1 es diferenciable.
Observacion 10 Cuando queramos indicar un una transformacion
x1 = x1(x
1, x2, x3),x2 = x2(x
1, x2, x3),x3 = x3(x
1, x2, x3).define un sistema de coordenadas curvilıneas (x1, x2, x3) en D lo haremos de la siguienteforma simplificada:
x1 = x1(x1, x2, x3), (x1, x2, x3) ∈ D,
x2 = x2(x1, x2, x3),
x3 = x3(x1, x2, x3).
4

Las coordenadas cilındricas como las esfericas son dos ejemplos muy importantes decoordenadas curvilineas.
• Coordenadas cilındricas En este caso las coordenadas cartesianas las designamospor (x1, x2, x3) = (x, y, z) y las curvilıneas por (x1, x2, x3) = (ρ, θ, t).
Consideramos el abierto
D = {(ρ, θ, t) : ρ ∈ (0,∞), θ ∈ (0, 2π), t ∈ R} ,
y la transformacionF : D 7−→ R3
(ρ, θ, t) F (ρ, θ, t),
dada por
F (ρ, θ, t) = (x(ρ, θ, t), y(ρ, θ, t), z(ρ, θ, t)) = (ρ cos θ, ρ sin θ, t).
La matriz jacobiana asociada a F contiene todas las derivadas de las componentesde F ,
Jac(F ) =
cos θ sin θ 0−ρ sin θ ρ cos θ 0
0 0 1
Observemos que
1. Todas las componentes de la matriz jacobiana son funciones continuas en D
2. La funcion F es inyectiva en D (comprobarlo) y por tanto tiene inversa sobrela imagen.
3. det(Jac(F )) 6= 0 en D. Por el Teorema de la funcion inversa, la funcion inversaes diferenciable sobre la imagen.
Por tanto, (ρ, θ, t) define un sistema de coordenadas en D ⊂ R3. Es usual, en lascoordenadas cilındricas, identificar t y z.
• Coordenadas esfericas Se les deja al alumno.
2.2 Base natural asociada a un sistema de coordenadas curvilıneas
Seax1 = x1(x
1, x2, x3), (x1, x2, x3) ∈ D,x2 = x2(x
1, x2, x3),x3 = x3(x
1, x2, x3),
y tomemos ahora un punto (x10, x20, x
30) ∈ D. Si fijamos la segunda y tercera coordenadas
x20, x30 pero damos valores a la primera obtenemos la funcion
x1 → (x1(x1, x20, x
30), x2(x
1, x20, x30), x3(x
1, x20, x30)) ∈ R3
5

que describe los puntos de una curva que pasa por (x10, x20, x
30). El vector de posicion de los
puntos de esta curva es
~r(x1) = x1(x1, x20, x
30)~e1 + x2(x
1, x20, x30)~e2 + x3(x
1, x20, x30)~e3
Al vector velocidad de esta trayectoria, en el punto (x10, x20, x
30), los denotaremos ~g1(x
10, x
20, x
30),
es decir
~g1(x10, x
20, x
30) =
∂xi∂x1
(x10, x20, x
30)~ei.
Cuando estemos trabajando en un punto generico (x1, x2, x3) evitaremos la notacion ~g1(x1, x2, x3)
y solo pondremos ~g1.De modo similar se definen
~gj =∂xi∂xj
~ei.
para j = 2, 3.Observemos que los vectores {~g1, ~g2, ~g3} = {~g1(x1, x2, x3), ~g2(x1, x2, x3), ~g3(x1, x2, x3)}
cambian en cada punto (x1, x2, x3) ∈ D.
copia.jpg
Figure 4: Base natural asociada a un sistema de coordenadas curvilıneas
Proposicion 11 Supongamos que la transformacion
x1 = x1(x1, x2, x3), (x1, x2, x3) ∈ D,
x2 = x2(x1, x2, x3),
x3 = x3(x1, x2, x3),
define un sistema de coordenadas curvilıneas en D. El conjunto {~g1, ~g2, ~g3} forma una basede V y la matriz de cambio a la base {~e1, ~e2, ~e3}, que llamaremos Qi
j, coincide con la matriz
jacobiana Qij =
(∂xi∂xj
). Por tanto,
~gj = Qij~ei =
∂xi∂xj
~ei
6

Proof. Lo unico que hay que probar realmente es que {~g1, ~g2, ~g3} forma una base.Recordemos que, puesto que xi(x
1, x2, x3) son diferenciables y tienen inversa diferenciableen la region D ⊂ R3, se verifica que la matriz jacobiana J tiene determinante no nulo enD, es decir
det (J) = det
(∂xi∂xj
)6= 0.
Por otro lado, la matriz jacobiana tiene por columnas las componentes de {~g1, ~g2, ~g3} en labase ortonormal {~e1, ~e2, ~e3} y por tanto
det (J) = [~g1, ~g2, ~g3] 6= 0,
lo que demuestra que {~g1, ~g2, ~g3} forma una base.
Definicion 12 Llamaremos base natural asociada a las coordenadas curvilıneas (x1, x2, x3)en D a la base {~g1, ~g2, ~g3}.
Si {~g1, ~g2, ~g3} = {~g1(x1, x2, x3), ~g2(x1, x2, x3), ~g3(x1, x2, x3)} es ortogonal (ortonormal)cualquiera que sea (x1, x2, x3) ∈ D, diremos que {~g1, ~g2, ~g3} es la base natural ortogonal(ortonormal) asociada a las coordenadas curvilıneas (x1, x2, x3) en D.
Ejemplo 13 Si (x, y, z) representan las coordenadas cartesianas, la transformacion
x = x(ρ, θ, z) = ρ cos θ, ρ > 0, θ ∈ (0, 2π) z ∈ R,y = y(ρ, θ, z) = ρ sin θ,z = z(ρ, θ, z) = z,
define las coordenadas cilındricas.
1. Defina la base natural cilındrica {~gρ, ~gθ, ~gz} en un punto general (ρ, θ, z) ∈ (0,∞)×(0, 2π)× R.
2. Determine las matrices de cambio de la base {~gρ, ~gθ, ~gz} a la base ortonormal {~e1, ~e2, ~e2},(que esta definiendo las coordenadas cartesianas), y de la base {~e1, ~e2, ~e2} a la base{~gρ, ~gθ, ~gz}.Demuestre que la base natural cilındrica {~gρ, ~gθ, ~gz} esta definida positiva.
3. Obtenga la matriz de Gram de la base {~gρ, ~gθ, ~gz}.
4. Calcule la base recıproca{~gρ, ~gθ, ~gz
}de la base {~gρ, ~gθ, ~gz} y su matriz de Gram.
Proof.
1. Consideramos el vector de posicion de un punto generico dado en coordenadas cilındricas
~r(ρ, θ, z) = x(ρ, θ, z)~e1 + y(ρ, θ, z)~e2 + z~e3 = ρ cos θ~e1 + ρ sin θ~e2 + z~e3.
La base natural cilındrica en un ponto (ρ0, θ0, z0) esta formada por los vectores{~gρ(ρ0, θ0, z0), ~g
θ(ρ0, θ0, z0), ~gz(ρ0, θ0, z0)
}donde
7

• ~gρ(ρ0, θ0, z0) es el vector tangente a la curva
rθ0,z0(ρ) = x(ρ, θ0, z0)~e1+y(ρ, θ0, z0)~e2+z0~e3 = ρ cos θ0~e1+ρ sin θ0~e2+z0~e3, ρ > 0,
en ρ0,
~gρ(ρ0, θ0, z0) =drθ0,z0dρ
(ρ0) = cos θ0~e1 + sin θ0~e2.
• ~gθ(ρ0, θ0, z0) es el vector tangente a la curva
rρ0,z0(θ) = x(ρ0, θ, z0)~e1+y(ρ0, θ, z0)~e2+z0~e3 = ρ0 cos θ~e1+ρ0 sin θ~e2+z0~e3, θ ∈ (0, 2π),
en θ0,
~gθ(ρ0, θ0, z0) =drρ0,z0dθ
(θ0) = −ρ0 sin θ0~e1 + ρ0 cos θ0~e2.
• ~gz(ρ0, θ0, z0) es el vector tangente a la curva
rρ0,θ0,(z) = x(ρ0, θ0, z)~e1+y(ρ0, θ0, z)~e2+z~e3 = ρ0 cos θ0~e1+ρ0 sin θ0~e2+z~e3, z ∈ R,
en z0,
~gz(ρ0, θ0, z0) =drρ0,θ0dz
(z0) = ~e3.
En un punto generico (ρ, θ, z) la base natural cilındrica es
{~gρ(ρ, θ, z), ~gθ(ρ, θ, z), ~gz(ρ, θ, z)} = {cos θ~e1 + sin θ~e2,−ρ sin θ~e1 + ρ cos θ~e2, ~e3} .
La base natural cilındrica depende del punto (ρ, θ, z). Si tomamos(2, π
3,−1
)que
corresponde al punto en coordenadas cartesianas(2 cos π
3, 2 sin π
3,−1
)= (1,
√3,−1),
la base natural cilındrica es{~gρ
(2,π
3,−1
), ~gθ
(2,π
3,−1
), ~gz
(2,π
3,−1
)}=
{1
2~e1 +
√3
2~e2,−
√3~e1 + ~e2, ~e3
}.
La base natural cilındrica se escribira usualm ente sin especificar el punto (ρ, θ, z),sobreentendiendose, por supuesto, la dependencia de este.
2. Matriz de cambio de la base natural cilındrica {~gρ, ~gθ, ~gz} a la cartesiana {~e1, ~e2, ~e2}
Q =
cos θ −ρ sin θ 0sin θ ρ cos θ 0
0 0 1
.
Ya que
[~gρ, ~gθ, ~gz] = det(Q) =
∣∣∣∣∣∣cos θ −ρ sin θ 0sin θ ρ cos θ 0
0 0 1
∣∣∣∣∣∣ = ρ > 0, ρ ∈ (o,∞),
8

{~gρ, ~gθ, ~gz} esta definida positiva.
Matriz de cambio de la base {~e1, ~e2, ~e2} a la base natural cilındrica {~gρ, ~gθ, ~gz}
Q−1 =
cos θ sin θ 0−ρ−1 sin θ ρ−1 cos θ 0
0 0 1
.
3. La matriz de Gram de {~gρ, ~gθ, ~gz} es
G = (Gij) =
~gρ · ~gρ ~gρ · ~gθ ~gρ · ~gz~gθ · ~gρ ~gθ · ~gθ ~gθ · ~gz~gz · ~gρ ~gz · ~gθ ~gz · ~gz
=
1 0 00 ρ2 00 0 1
,
lo que nos dice que la base natural cilındrica es ortogonal.
4. Es facil comprobar que la matriz inversa de la matriz de Gram de la base {~gρ, ~gθ, ~gz}es
G−1 = (Gij) =
1 0 00 ρ−2 00 0 1
. (1)
La base recıproca de {~gρ, ~gθ, ~gz} es
~gρ =~gρ
|~gρ|2= ~gρ, ~gθ =
~gθ
|~gθ|2=~gθρ2, ~gz =
~gz
|~gz|2= ~gz.
La matriz de Gram de la base recıproca{~gρ, ~gθ, ~gz
}es
(Gij) =
1 0 00 ρ−2 00 0 1
.
Ejemplo 14 Si (x, y, z) representan las coordenadas cartesianas, la transformacion
x = x(r, ϕ, θ) = r sinϕ cos θ, r > 0, ϕ ∈ (0, π), θ ∈ (0, 2π),y = y(r, ϕ, θ) = r sinϕ sin θ,z = z(r, ϕ, θ) = r cosϕ,
define las coordenadas esfericas.
1. Defina la base natural esferica {~gr, ~gϕ, ~gθ}.
2. Determine las matrices de cambio de la base {~gr, ~gϕ, ~gθ} a la base ortonormal {~e1, ~e2, ~e2},(que esta definiendo las coordenadas cartesianas), y de la base {~e1, ~e2, ~e2} a la base{~gr, ~gϕ, ~gθ}.Determine que la base natural esferica esta definida positiva.
9

3. Obtenga la matriz de Gram de la base {~gr, ~gϕ, ~gθ}.
4. Calcule la base recıproca{~gr, ~gϕ, ~gθ
}de la base {~gr, ~gϕ, ~gθ} y su matriz de Gram.
Proof.
1. La base natural esferica {~gr, ~gϕ, ~gθ} en un punto arbitrario (r, ϕ, θ) esta dada por
• ~gr(r, ϕ, θ) = sinϕ cos θ~e1 + sinϕ sin θ~e2 + cosϕ~e3,
• ~gϕ(r, ϕ, θ) = r cosϕ cos θ~e1 + r cosϕ sin θ~e2 − r sinϕ~e3,
• ~gθ(r, ϕ, θ) = −r sinϕ sin θ~e1 + r sinϕ cos θ~e2.
La base natural esferica depende del punto donde la estemos calculando. Si consider-
amos el punto(2, π
4, π6
)que corresponde a las coordenadas cartesianas
(√62,√22,√
3)
,
la base natural en(2, π
4, π6
)es{
~gr
(2,π
4,π
6
), ~gϕ
(2,π
4,π
6
), ~gθ
(2,π
4,π
6
)}=
{ √3
2√
2~e1 +
1
2√
2~e2 +
1√2~e3,
√3
2~e1 +
1√2~e2 −
1√2~e3,−
1√2~e1 +
√3
2~e3
}.
2. La matriz de cambio de la base {~gr, ~gϕ, ~gθ} a la base {~e1, ~e2, ~e2} es
Q =
sinϕ cos θ r cosϕ cos θ −r sinϕ sin θsinϕ sin θ r cosϕ sin θ r sinϕ cos θ
cosϕ −r sinϕ 0
.
Ya que
[~gr, ~gϕ, ~gθ] = det(Q) =
∣∣∣∣∣∣sinϕ cos θ r cosϕ cos θ −r sinϕ sin θsinϕ sin θ r cosϕ sin θ r sinϕ cos θ
cosϕ −r sinϕ 0
∣∣∣∣∣∣ = r2 sinϕ > 0, r > 0, ϕ ∈ (0, π),
la base natural esferica {~gr, ~gϕ, ~gθ} esta definida positiva.
La matriz de cambio de la base {~e1, ~e2, ~e2} a la base {~gr, ~gϕ, ~gθ} es
Q−1=
sinϕ cos θ sinϕ sin θ cosϕr
cosϕ cos θr
cosϕ sin θr
− sinϕr
− sin θr sinϕ
cos θr sinϕ
0
.
3. La matriz de Gram de la base {~gr, ~gϕ, ~gθ} es
G = (Gij) =
1 0 00 r2 00 0 r2 sin2 ϕ
.
La base natural esferica es ortogormal.
10

4. No es difıcil comprobar que
G−1 = (Gij) =
1 0 00 1
r20
0 0 1r2 sin2 ϕ
.
La base recıproca{~gr, ~gϕ, ~gθ
}de {~gr, ~gϕ, ~gθ} es
~gr =~gr
|~gr|2= ~gr, , ~gϕ =
~gϕ
|~gϕ|2=~gϕr2, , ~gθ =
~gθ
|~gθ|2=
~gθr2 sin2 ϕ
.
La matriz de Gram de la base reccıproca{~gr, ~gϕ, ~gθ
}es
(Gij) =
1 0 00 1
r20
0 0 1r2 sin2 ϕ
.
Ejemplo 15 Sea {~e1, ~e2, ~e3} una base ortonormal y (x1, x2, x3) las coordenadas cartesianasasociadas a la misma. Consideramos la transformacion
x1(u, v, w) = eu − ev, u, v, w ∈ R,
x2(u, v, w) = eu + ev,
x3(u, v, w) = ew.
(2)
1. Demuestre que la transformacion define un sistema de coordenadas curvilıneas.
2. Calcule la base natural {~gu, ~gv, ~gw} del sistema de coordenadas curvilıneas, su baserecıproca {~gu, ~gv, ~gw} y las matrices de Gram asociadas a la base natural y a larecıproca.
Proof.
1. Es facil ver que xi(u, v, w) son de clase C1(R3) y que la transformacion (2) admiteuna inversa definida por
u(x1, x2, x3) = log x1+x22
, 0 < x2 < |x1|, x3 > 0,v(x1, x2, x3) = log x2−x1
2,
w(x1, x2, x3) = log x3
,
y por lo tanto (2) define un sistema de coordenadas curvilıneas.
2. Sea
~r(u, v, w) = x1(u, v, w)~e1+x2(u, v, w)~e2+x3(u, v, w)~e3 = (eu − ev)~e1+(eu + ev)~e2+ew~e3,
entonces la base nariral curvilınea {~gu, ~gv, ~gw} esta dada po
11

• ~g1(u, v, w) = ~gu = ∂~r∂u
(u, v, w) = eu~e1 + eu~e2,
• ~g2(u, v, w) = ~gv = ∂~r∂u
(u, v, w) = −ev~e1 + ev~e2,
• ~g3(u, v, w) = ~gw = ∂~r∂u
(u, v, w) = ew~e3.
Esta base esta orientada positivamente, ya que
[~gu, ~gv, ~gw] =
∣∣∣∣∣∣eu eu 0−ev ev 0
0 0 ew
∣∣∣∣∣∣ = 2eu+v+w > 0.
La matriz de Gram de {~gu, ~gv, ~gw} es
G = (Gij) =
~gu · ~gu ~gu · ~gv ~gu · ~gw~gv · ~gu ~gv · ~gv ~gv · ~gw~gw · ~gu ~gw · ~gv ~gw · ~gw
=
2e2u 0 00 2e2v 00 0 e2w
.
La base recıproca {~gu, ~gv, ~gw} esta dada
• ~g1(u, v, w) = ~gu = 1[~gu,~gv ,~gw]
~gv × ~gw = 12eu~e1 + 1
2eu~e2,
• ~g2(u, v, w) = ~gv = 1[~gu,~gv ,~gw]
~gw × ~gu = − 12ev~e1 + 1
2ev~e2,
• ~g3(u, v, w) = ~gw = 1[~gu,~gv ,~gw]
~gu × ~gv = 1ew~e3.
Es facil ver que G−1 = (Gij) =
12e−2u 0 00 1
2e−2v 0
0 0 e−2w
. Podrıamos gaber calculado
la base recıproca de la forma~gu~gv~gw
= (Gij)
~gu~gv~gw
=
12e−2u 0 00 1
2e−2v 0
0 0 e−2w
eu~e1 + eu~e2−ev~e1 + ev~e2
ew~e3
=
12eu~e1 + 1
2eu~e2
− 12ev~e1 + 1
2ev~e2
1ew~e3
.
La matriz de Gram de {~gu, ~gv, ~gw} es G−1 = (Gij).
3 Campos tensoriales
Definicion 16 Un campo tensorial T definido sobre un dominio D ⊂ R3, (conjunto abiertode R3), es una aplicacion que asigna a cada punto de D un tensor. En coordenadascartesianas,
(x, y, z)→ T (x, y, z).
Como casos particulares estan los campos escalares, campos tensoriales de orden cero,que asignan a cada punto de D un escalar (tensor de orden 0), o los campos vectoriales,campos tensoriales de orden 1, que asignan a cada punto de D un vector.
12

Ejemplos de campos vectoriales son los que asignan a cada punto de R3 el vectorconstante ~e1, o el vector variable ~gρ. Un ejemplo de campo tensorial de orden 2 es el queasigna a cada punto el tensor identidad
T (x, y, z) = ~e1 ⊗ ~e1 + ~e2 ⊗ ~e2 + ~e3 ⊗ ~e3.
Ademas de las tres variables espaciales, los campos pueden depender de la variabletemporal, es decir
T = T (x, y, z, t).
3.1 Campos escalares
Los campos son difıcilmente representables graficamente salvo en dimension 2, donde eluso de mapas de colores o curvas de nivel (mapas geograficos) permite una interpretacionadecuada.
Definicion 17 Sea f = f(x1, x2, x3), (x1, x2, x3) ∈ D un campo escalar expresado en unsistema de coordenadas cartesianas. Llamaremos superficies de nivel (curvas en R2) alconjunto de puntos (x, y, z) ∈ R3 para los cuales f(x, y, z) = C con C constante.
Ejemplo 18 Consideramos el campo escalar
f(x1, x2, x3) = x21 + x22 + x23, (x1, x2, x3) ∈ R3.
Si tomamos C = 4, la superficie de nivel asociada a C = 4 es
S4 ={
(x1, x2, x3) ∈ R3 : x21 + x22 + x23 = 4},
que corresponde con la esfera de centro (0, 0, 0) y radio 2.Si C = −3,
S−3 ={
(x1, x2, x3) ∈ R3 : x21 + x22 + x23 = −3}
= ∅.
La superficies de nivel asociadas al campo escalar f(x1, x2, x3) = x21 +x22 +x23 son todas lascircunsferencias de centro (0, 0, 0) y radio r > 0.
Ejemplo 19 Consideramos el campo escalar
f(x1, x2, x3) = x1 − 2x2 + x3, (x1, x2, x3) ∈ R3.
Si tomamos C = 4, la superficie de nivel asociada a C = 4 es
Π4 ={
(x1, x2, x3) ∈ R3 : x1 − 2x2 + x3 = 4},
que corresponde a un plano perpendicular al vector ~v = ~i − 2~j + ~k y pasa por el punto(3, 1, 3).
13

Si C = −3,Π−3 =
{(x1, x2, x3) ∈ R3 : x1 − 2x22 + x3 = −3
},
que corresponde a un plano perpendicular al vector ~v = ~i − 2~j + ~k y pasa por el punto(1, 3, 2).
La superficies de nivel asociadas al campo escalar f(x1, x2, x3) = x1−2x2+x3 son todos
los planos perpendiculares al vector ~v =~i− 2~j + ~k.
Definicion 20 Sea f = f(x1, x2, x3), (x1, x2, x3) ∈ D ⊂ R3 un campo escalar expresadoen un sistema de coordenadas cartesianas. Llamaremos gradiente de f al campo vectorial
∇f : D ⊂ R3 7−→ V(p1, p2, p3)
∂f∂xi
(p1, p2, p3)~ei = ∂f∂x1
(p1, p2, p3)~i+ ∂f∂x2
(p1, p2, p3)~j + ∂f∂x3
(p1, p2, p3)~k.
∇f(p1, p2, p3) =∂f
∂x1(p1, p2, p3)~i+
∂f
∂x2(p1, p2, p3)~j +
∂f
∂x3(p1, p2, p3)~k.
Puesto que ∇f(p1, p2, p3) ∈ V , ∇f(p1, p2, p3) puede verse como un tensor d de primerorden
∇f(p1, p2, p3)· : ~v ∈ V → ∇f(p1, p2, p3) · ~v ∈ R.
La interpretacion geometrica del gradiente se obtiene facilmente a partir de un nuevoconcepto:
Definicion 21 Dado un vector unitario ~e, llamaremos derivada direccional de f en ladireccion ~e y en el punto P = (p1, p2, p3) al producto
D~ef(P ) = ∇f(P ) · ~e.
La derivada direccional de f es la direccion del vector unitario ~e coincide con el siguientelımite
limh→0
f(P + h~e)− f(P )
h.
Por tanto, coincide con la pendiente del campo escalar f en la direccion unitaria ~e. Losvalores de pendiente cero corresponden a las direcciones en las que f no cambia (superficiesde nivel)
Proposicion 22 Los valores extremos de la derivada direccional ocurren en las direccionesdel gradiente y su opuesto.
Proof. Basta darse cuenta de que
D~ef = ∇f · ~e = |∇f ||~e| cos θ = |∇f | cos θ
que es maximo cuando θ = 0 (e.d. ~e = ∇f/|∇f |) y mınimo cuando θ = π (e.d. ~e =−∇f/|∇f |).
14

Ejemplo 23 Consideramos el campo escalar
f(x, y, z) = x2e−yz, (x, y, z) ∈ R3.
Calcule la tasa de cambio de f en la direccion del vector unitario ~v =(
1√3, 1√
3, 1√
3
)en el
punto (1, 0, 0).
Proof. La tasa de cambio requerida es
∇f(1, 0, 0) ·(
1√3,
1√3,
1√3
)=(2xe−yz,−x2ze−yz,−x2ye−yz
)∣∣(x,y,)=(1,0,0)
·(
1√3,
1√3,
1√3
)
= (2, 0, 0) ·(
1√3,
1√3,
1√3
)=
2√3.
El siguiente importante resultado relaciona el gradiente y lascurvas de vivel de un campoescalar.
Teorema 24 Consideramos el campo escalar definido en coordenadas cartesianas
f(x1, x2, x3), (x1, x2, x3) ∈ D ⊂ R3,
y (p1, p2, p3) un punto de la superficie de nivel definida por
SC ={
(x1, x2, x3) ∈ R3 : f(x1, x2, x3) = C}.
∇f(p1, p2, p3) es normal a la superficie de nivel SC en el sentido siguiente: si
c(t) = (x1(t), x2(t), x3(t)), t ∈ I, es una trayectoria en SC , (f(x1(t), x2(t), x3(t)) = C, t ∈ I,
con c(0) = (p1, p2, p3) y ~v ∈ V es el vector tamgente a la trayectoria c(t) , ~v = c′(0) =
x′1(0)~i+ x′2(0)~j + x′3(0)~k, entonces
∇f(p1, p2, p3) · ~v = 0.
Proof. Como c(t)esta en SC se tiene que
f(c(t)) = (f(x1(t), x2(t), x3(t)) = C, t ∈ I.
Si derivamos en la igualdad anterior, esta tiene queser 0. Una aplicacion de la regla delacadena nos da
0 =d
dt(f(x1(t), x2(t), x3(t))
∣∣∣∣t=0
=∂
∂x1(f(x1(0), x2(0), x3(0))x′1(0)
+∂
∂x2(f(x1(0), x2(0), x3(0))x′2(0) +
∂
∂x3(f(x1(0), x2(0), x3(0))x′3(0) = ∇f(p1, p2, p3) · ~v.
15

Ejemplo 25 Hallar un vector unitario normal a la superficie
S ={
(x, y, z) ∈ R3 : z = x2y2 + y + 1},
en (0, 0, 1).
Proof. Sea f(x, y, z) = x2y2+y+1−z y consideramos la superficie definida por f(x, y, z) =0. Esta superficie de nivel coincide con S. El gradiente en un punto generico (x, y, z) estadado por
∇f(x, y, z) = 2xy2~i+ (2x2y + 1)~j − ~k,
y ∇f(0, 0, 1) = ~j − ~k. Este vector es perpendicular a S en (0, 0, 1) y el perpendicular
unitario es ~n = 1√2(~j − ~k).
Si el campo esta dado en terminos de unas coordenadas curvilıneas (cilındricas oesfericas) la expresion del gradiente se obtiene de aplicar la regla de la cadena. La formulase enuncia en la siguiente proposicion.
Proposicion 26 Sea {~e1, ~e2, ~e3} una base ortonormal definida positiva y h(x1, x2, x3) unafuncion escalar definida en las coordenadas cartesianas asociadas a la base {~e1, ~e2, ~e3}.Definimos
∇h(x1, x2, x3) =∂h
∂x1(x1, x2, x3)~e1 +
∂h
∂x2(x1, x2, x3)~e2 +
∂h
∂x3(x1, x2, x3).~e3. (3)
Supongamos que la transformacion
xi = xi(x1, x2, x3), (x1, x2, x3) ∈ D abierto de R3,
define un sistema de coordenadas curvilineas (x1, x2, x3). Sea
f(x1, x2, x3) = h(x1(x1, x2, x3), x2(x
1, x2, x3), x3(x1, x2, x3)), (x1, x2, x3) ∈ D. (4)
Si {~g1, ~g2, ~g3} es la base natural ortogonal del sitema de coordenadas curvilıneas y {~g1, ~g2, ~g3}su base recıproca, se tiene
∂f
∂xi(x1, x2, x3) = ∇h(x1(x
1, x2, x3), x2(x1, x2, x3), x3(x
1, x2, x3)) · ~gi(x1, x2, x3), (5)
y por lo tanto
∇h(x1(x1, x2, x3), x2(x
1, x2, x3), x3(x1, x2, x3)) =
∂f
∂xi(x1, x2, x2)~gi(x1, x2, x3), (6)
∇h(x1(x1, x2, x3), x2(x
1, x2, x3), x3(x1, x2, x3)) =
∂f
∂xi(x1, x2, x2)
~gi(x1, x2, x3)
|~gi(x1, x2, x3)|2. (7)
16

Proof. De (4), de la regla de la cadena y recordando que
~gi = ~gi(x1, x2, x3) =
∂xj∂xi
(x1, x2, x3)~ej,
obtenemos (5) y de aquı (6) y (7). En efecto, vamos a expresar el ∇h en terminos de suscoordenadas covariantes,
∇h = (∇h · ~g1)~g1 + (∇h · ~g2)~g2 + (∇h · ~g3)~g3 = (∇h · ~gi)~gi,
pero como
∂f
∂xi(x1, x2, x3) =
∂h
∂xj(x1(x
1, x2, x3), x2(x1, x2, x3), x3(x
1, x2, x3))∂xj∂xi
(x1, x2, x2)
=
(∂h
∂xj(x1(x
1, x2, x3), x2(x1, x2, x3), x3(x
1, x2, x3))~ej
)·(∂xj∂xi
(x1, x2, x2)~ej
)= ∇h(x1(x
1, x2, x3), x2(x1, x2, x3), x3(x
1, x2, x3)) · ~gi(x1, x2, x3) ≡ ∇h · ~gi,
obtenemos (6) y (7).
Observacion 27 Observese que (6) nos da la expresion de ∇h en terminos de las compo-nentes covariantes asociadas a la base natural correspondiente a las coordenadas curvilineas(x1, x2, x3). Mientra que (7) da la expresion en terminos de las coordenadas contravari-antes.
Ejercicio 28 Calcule las componentes covariantes y contravariantes del gradiente del cam-poi escalar
f(ρ, θ, z) = ρ2 + z2,
en la base natural cilındrica.
Proof. Sea{~i,~j,~k
}la base ortonormal estandar y designamos por (x1, x2, x3) sus
coordenadas cartesianas asociadas. Las coordenadas cilındricas (ρ, θ, z) estan definidaspor
x1(ρ, θ, z) = ρ cos θ, ρ > 0, θ ∈ (0, 2π), z ∈ R,
x2(ρ, θ, z) = ρ sin θ,
x3 = z.
,
y la base natural cilındrica por
{~gρ(ρ, θ, z), ~gθ(ρ, θ, z), ~gz(ρ, θ, z)} = {~gρ, ~gθ, ~gz} = {cos θ~e1 + sin θ~e2,−ρ sin θ~e1 + ρ cos θ~e2, ~e3} .
Sea h(x1, x2, x3) la funcion que satisface
h(x1(ρ, θ, z), x2(ρ, θ, z), x3(ρ, θ, z)) = f(ρ, θ, z) = ρ2 + z2. (8)
17

Observese que no tenemos porque conocer la funcion h(x1, x2, x3) de forma ex-plicita.
Para simplificar la notacion, identificamos
∇h(x1(ρ, θ, z), x2(ρ, θ, z), x3(ρ, θ, z)) = ∇f(ρ, θ, z).
Segun (6)
∇f(ρ, θ, z) =∂f
∂ρ(ρ, θ, z)~gρ +
∂f
∂θ(ρ, θ, z)~gθ +
∂f
∂z(ρ, θ, z)~gz = 2ρ~gρ + 0~gθ + 2z~gz, (9)
y las coordenadas covariantes de ∇f(ρ, θ, z) en la base natural cilindrica son 2ρ, 0 y 2z.Ahora calculamos las componentes contravariantes de ∇f(ρ, θ, z) en la base natural cilin-drica
∇f(ρ, θ, z) = 2ρ~gρ
|~gρ|2+ 0
~gθ
|~gθ|2+ 2z
~gz
|~gz|2= 2ρ~gρ + 0~gθ + 2z~gz, (10)
y las componentes contravariantes son 2ρ, 0 y 2z.
Observacion 29 Es facil ver que la funcion h(x1, x2, x3) que satisface (8) es
h(x1, x2, x3) = x21 + x22 + x23.
∇h(x1(ρ, θ, z), x2(ρ, θ, z), x3(ρ, θ, z))
= 2x1(ρ, θ, z)~i+ 22(ρ, θ, z)~j + 2x3(ρ, θ, z)~k = 2ρ cos θ~i+ 2ρ sin θ~j + 2z~k,
nos da el gradiente de f(ρ, θ, z), (identificada esta con h(x1(ρ, θ, z), x2(ρ, θ, z), x3(ρ, θ, z))),
en la base cartesian{~i,~j,~k
}en el punto (ρ, θ, z). (9) y (10) nos la expresion del gradiente
de f(ρ, θ, z) en las bases{~gρ, ~gθ, ~gz
}y {~gρ, ~gθ, ~gz} respectivamente.
Ejercicio 30 Sea {~e1, ~e2, ~e3} una base ortonormal y (x1, x2, x3) sus coordenadas carte-sianas asociadas. Consideramos los campos escalares
h1(x1, x2, x3) = x1x3, h2(x1, x2, x3) = x21 + x22.
1. Defina los campos escalares en coordenadas cilındricas y esfericas.
2. Calcule las componentes covariantes y contravariantes de los campos ∇h1 y ∇h2 conrespecto a las bases naturales cilındricas y esfericas.
3. Calcule las componentes covariantes y contravariantes del campo h = h1h2 + 2h21 conrespecto a la base naturale cilındrica.
Proof.
18

1.
f1(ρ, θ, z) = h1(ρ cos θ, ρ sin θ, z) = ρz, f2(ρ, θ, z) = h2(ρ cos θ, ρ sin θ, z) = ρ2,
g1(r, ϕ, θ) = h1(r sinϕ cos θ, r sinϕ sin θ, r cosϕ) = r2 sinϕ cosϕ sin θ =r2 sin(2ϕ) sin θ
2,
g2(r, ϕ, θ) = h2(r sinϕ cos θ, r sinϕ sin θ, r cosϕ) = r2 sin2 ϕ cos2 θ+r2 sin2 ϕ sin2 θ = r2 sin2 ϕ.
2.
∇f1(ρ, θ, z) =∂f1∂ρ
(ρ, θ, z)~gρ +∂f1∂θ
(ρ, θ, z)~gθ +∂f1∂z
(ρ, θ, z)~gz = z~gρ + ρ~gz
= z~gρ
|~gρ|2+ ρ
~gz
|~gz|2= z~gρ + ρ~gz,
y las componentes convariantes y contravariantes de ∇h1 con respecto a la basenatural cilındrica son z, 0 y ρ.
∇f2(ρ, θ, z) = 2ρ~gρ = 2ρ~gρ,
y las componentes convariantes y contravariantes de ∇h2 con respecto a la basenatural cilındrica son 2ρ, 0 y 0.
∇g1(r, ϕ, θ) =∂g1∂r
(r, ϕ, θ)~gr +∂g1∂ϕ
(r, ϕ, θ)~gϕ +∂g1∂θ
(r, ϕ, θ)~gθ
= 2r sin(2ϕ) sin θ~gr + r2 cos(2ϕ) sin θ~gϕ +r2 sin(2ϕ) cos θ
2~gθ
= 2r sin(2ϕ) sin θ~gr
|~gr|2+ r2 cos(2ϕ) sin θ
~gϕ
|~gϕ|2+r2 sin(2ϕ) cos θ
2
~gθ
|~gθ|2
= 2r sin(2ϕ) sin θ~gr + cos(2ϕ) sin θ~gϕ +cosϕ cos θ
sinϕ~gθ,
y las componentes convariantes y contravariantes de ∇h1 con respecto a la base
natural esferica son 2r sin(2ϕ) sin θ, r2 cos(2ϕ) sin θ y r2 sin(2ϕ) cos θ2
y 2r sin(2ϕ) sin θ,
cos(2ϕ) sin θ y cosϕ cos θsinϕ
resspectivamente.
∇g2(r, ϕ, θ) = 2r sin2 ϕ~gr + r2 sin(2ϕ)~gϕ = 2r sin2 ϕ~gr + sin(2ϕ)~gϕ,
y las componentes convariantes y contravariantes de ∇h2 con respecto a la basenatural esferica son 2r sin2 ϕ, r2 sin(2ϕ) y 0 y 2r sin2 ϕ, sin(2ϕ) y 0 resspectivamente.
19

3. Vamos a utilizar∇(h1h2) = h2∇h1 + h1∇h2.
Sea f(ρ, θ, z) = h(ρ cos θ, ρ sin θ, z).
∇f(ρ, θ, z) = f2(ρ, θ, z)∇f1(ρ, θ, z) + f1(ρ, θ, z)∇f2(ρ, θ, z) + 4f1(ρ, θ, z)∇f1(ρ, θ, z)
= ρ2 (z~gρ + ρ~gz) + ρz(2ρ~gρ
)+ 4ρz (z~gρ + ρ~gz)
=(3zρ2 + 4ρz2
)~gρ +
(ρ3 + 4ρ2z
)~gz =
(3zρ2 + 4ρz2
)~gρ +
(ρ3 + 4ρ2z
)~gz.
3.2 Campos vectoriales
Definicion 31 Sea {~e1, ~e2, ~e3} una base ortonormal con coordenadas cartesianas asociadas(x1, x2, x3) y consideramos el un campo vectorial
~u(x1, x2, x3) = u1(x1, x2, x3)~e1+u2(x1, x2, x3)~e2+u3(x1, x2, x3)~e3 = ui~ei, (x1, x2, x3) ∈ D.
Si P = (p1, p2, p3) ∈ D es un punto, llamaremos gradiente de ~u en el punto P , al tensorde orden 2
∇~u(P ) =∂ui∂xj
(P )~ei ⊗ ~ej. (11)
La matriz de componentes del tensor ∇~u(P ) con respecto a la base {~e1, ~e2, ~e3} es∂u1∂x1
(p1, p2, p3)∂u1∂x2
(p1, p2, p3)∂u1∂x3
(p1, p2, p3)∂u2∂x1
(p1, p2, p3)∂u2∂x2
(p1, p2, p3)∂u2∂x3
(p1, p2, p3)∂u3∂x1
(p1, p2, p3)∂u3∂x2
(p1, p2, p3)∂u3∂x3
(p1, p2, p3)
Observamos que ∇~u define un campo tensorial de orden dos sobre D ⊂ R3. Escribire-
mos ∇~u(P ) solo cuando la dependencia en el punto P sea relevante.Para interpretar el tensor ∇~u le aplicamos un vector ~v,
∇~u · ~v = ∇~v~u =∂ui∂xj
~ei ⊗ ~ej · (vk~ek) =∂ui∂xj
vj~ei = (∇ui~v)~ei. (12)
es decir, es el vector que contiene los gradientes de cada una de las componentes aplicadosa ~v. En particular
∇~u · ~ei = ∇~ei~u =∂uj∂xi
~ej =∂~u
∂xi. (13)
Ejemplo 32 Dado el campo vectorial
~u = (2x1 + x2x3)~i+ (x22 − x23)~j + x1x2ex3~k, (x1, x2, x3) ∈ R3,
20

1. determine la matriz de componentes y la representacion diadica de ∇~u(2,−1, 0) con
respecto a la base {~e1, ~e2, ~e3} ={~i,~j,~k
},
2. obtenga det (∇~u(2,−1, 0)) y Tr (∇~u(2,−1, 0)),
3. si ~v = 2~e1 − 3~e3 = 2~i− 3~k, calcule ∇~u(2,−1, 0) · ~v.
Proof.
1. Lamatriz de componentes es∂u1∂x1
∂u1∂x2
∂u1∂x3
∂u2∂x1
∂u2∂x2
∂u2∂x3
∂u3∂x1
∂u3∂x2
∂u3∂x3
(x1,x2,x3)=(2,−1,0)
=
2 x3 x20 2x2 −2x3
x2ex3 x1e
x3 x1x2ex3
(x1,x2,x3)=(2,−1,0)
=
2 0 −10 −2 0−1 2 −2
.
La representacion diadica
∇~u(2,−1, 0) = 2~e1 ⊗ ~e1 − ~e1 ⊗ ~e3 − 2~e2 ⊗ ~e2 − ~e3 ⊗ ~e1 + 2~e3 ⊗ ~e2 − 2~e3 ⊗ ~e3.
2. det (∇~u(2,−1, 0)) = 10 y Tr (∇~u(2,−1, 0)) = −2.
3. Empezamos aplicando la linealidad y luego (13),
∇~u(2,−1, 0)·~v = 2∇~u(2,−1, 0)·~e1−3∇~u(2,−1, 0)·~e3 = 2∂~u
∂x1(2,−1, 0)−3
∂~u
∂x3(2,−1, 0)
= 2(
2~i+ x2ex3~k)(x1,x2,x3)=(2,−1,0)
− 3(x2~i− 2x3~j + x1x2e
x3~k)(x1,x2,x3)=(2,−1,0)
= 2(
2~i− ~k)− 3
(−~i− 2~k
)= 7~i+ 4~k.
Proposicion 33 Sean ~u,~v : D ⊂ R3 7−→ R3 dos campos vectoriales y f : D ⊂ R3 7−→ Run campo escalar. Se verifican las siguientes propiedades:
1. Dados α, β ∈ R, ∇(α~u+ β~v) = α∇~u+ β∇~v.
2. ∇(f~u) = ~u⊗∇f + f∇~u.
3. ∇(~u · ~v) = ~v · ∇~u+ ~u · ∇~v.
La identidad de encima es una igualdad de tensores de orden 1. Si ~w es un vectorarbitrario, podemos leer la identidad de encima como
∇(~u · ~v) · ~w = ~v · ∇~w~u+ ~u · ∇~w~v.
Proof.
21

1. Es inmediato de la propia definicion de ∇~u.
2. Sea {~e1, ~e2, ~e3} una base ortonormal, (o lo que es lo mismo, introducimos un sistemade coordenadas cartesianas) , ~u = ui~ei y P un punto.
∇(f~u)(P ) =∂(fui)
∂xj(P )~ei ⊗ ~ej = ui(P )
∂(f)
∂xj(P )~ei ⊗ ~ej + f(P )
∂(ui)
∂xj(P )~ei ⊗ ~ej
= (ui(P )~ei)⊗(∂f
∂xj~ej
)+ f(P )∇~u(P ) = ~u(P )⊗∇f(P ) + f(P )∇~u(P ).
3. Sea ~w un vector, ~u = ui~ei = ui(x1, x2, x3)~ei y ~v = vi~ei.
∇(~u · ~v)(P ) · ~w = ∇(uivi)(P ) · ~w = vi(P )
(∂ui∂xj
(P )~ej
)· ~w + ui(P )
(∂vi∂xj
(P )~ej
)· ~w
= vi(P )
(∂ui∂xj
(P )(~ej · ~w)
)+ ui(P )
(∂vi∂xj
(P )(~ej · ~w)
)=
(∂ui∂xj
(P )(~ej · ~w)~ei
)· (vi~ei) +
(∂vi∂xj
(P )(~ej · ~w)~ei
)· (ui~ei)
=
(∂ui∂xj
(P )~ei ⊗ ~ej · ~w)· ~v +
(∂vi∂xj
(P )~ei ⊗ ~ej · ~w)· ~u = ∇~w~u · ~v +∇~w~v · ~u.
Ejemplo 34 Comprobar que el gradiente del vector de posicion es el tensor identidad.
Proof. Sea {~e1, ~e2, ~e3} una base ortonorma. Si ~x es un vector,
~x = x1~e1 + x2~e2 + x3~e3.
El vector de posicion ~r es el campo vectorial, definido en los puntos P = (x1, x2, x2)identificados con los vectores P − 0 = xi~ei = ~x,
~r(x1, x2, x3) = (r1(x1, x2, x3), r2(x1, x2, x3), r3(x1, x2, x3)) = (x1, x2, x3).
Entonces
∇~r =∂ri∂xj
~ei ⊗ ~ej = δij~ei ⊗ ~ej = ~ei ⊗ ~ei = ~e1 ⊗ ~e1 + ~e2 ⊗ ~e2 + ~e3 ⊗ ~e3 = 1.
22

4 Sımbolos de Christofel
Definicion 35 Sea
x1 = x1(x1, x2, x3), (x1, x2, x3) ∈ D ⊂ R3
x2 = x2(x1, x2, x3),
x3 = x3(x1, x2, x3),
un sistema de coordenadas curvilıneas (x1, x2, x3) tal que su base natural asociada {~g1, ~g2, ~g3}es ortonormal. Se tiene
∂~gi∂xj
(x1, x2, x3) = Γkij(x1, x2, x3)~gk(x
1, x2, x3), (14)
con
Γkij(x1, x2, x3) =
∂~gi∂xj
(x1, x2, x3) · ~gk(x1, x2, x3). (15)
Los{
Γkij}i,j,k∈1,2,3 son conocidos como los sımbolos de Christoffel asociados al sistema de
coordenadas curvilıneas (x1, x2, x3)
Proposicion 36 Sea
x1 = x1(x1, x2, x3), (x1, x2, x3) ∈ D ⊂ R3
x2 = x2(x1, x2, x3),
x3 = x3(x1, x2, x3),
un sistema de coordenadas curvilıneas (x1, x2, x3) tal que su base natural asociada {~g1, ~g2, ~g3}es ortogormal. Se tiene
Γkij = Γkji (16)
Proof. Sabemos que
~gi(x1, x2, x3) =
∂xk∂xi
(x1, x2, x3),
entonces
∂~gi∂xj
(x1, x2, x3) =∂
∂xj
(∂xk∂xi
(x1, x2, x3)
)=
∂2xk∂2xjxi
(x1, x2, x3) =∂2xk∂2xixj
(x1, x2, x3)
=∂
∂xi
(∂xk∂xj
(x1, x2, x3)
)=∂~gj∂xi
(x1, x2, x3) =⇒ Γkij = Γkji.
Ejemplo 37 Sımbolos de Christoffel del sistema de coordenadas efericas.
23

Proof.Sea (x1, x2, x3) las coordenadas cartesianas asociadas a una cierta base {~e1, ~e2, ~e3}
ortonormal. Las coordenadas esfericas estan definidas por
x1 = x1(r, ϕ, θ) = r sinϕ cos θ, r > 0, ϕ ∈ (0, π), θ ∈ (0, 2π),x2 = x2(r, ϕ, θ) = r sinϕ sin θ,x3 = x3(r, ϕ, θ) = r cosϕ.
Segun el Ejemplo 14, la base natural esferica {~gr, ~gϕ, ~gθ} esta dada por
• ~gr(r, ϕ, θ) = ~gr = ~g1 = sinϕ cos θ~e1 + sinϕ sin θ~e2 + cosϕ~e3,
• ~gϕ(r, ϕ, θ) = ~gϕ = ~g2 = r cosϕ cos θ~e1 + r cosϕ sin θ~e2 − r sinϕ~e3 ,
• ~gθ(r, ϕ, θ) = ~gθ = ~g3 = −r sinϕ sin θ~e1 + r sinϕ cos θ~e2,
y la recıproca por
• ~gr(r, ϕ, θ) = ~gr = ~g1 = sinϕ cos θ~e1 + sinϕ sin θ~e2 + cosϕ~e3,
• ~gϕ(r, ϕ, θ) = ~gϕ = ~g2 = cosϕ cos θr
~e1 + cosϕ sin θr
~e2 − sinϕr~e3 ,
• ~gθ(r, ϕ, θ) = ~gθ = ~g3 = −r sin θr sinϕ
~e1 + cos θr sinϕ
~e2.
Definimos las matrices
Γ1 =
Γ111 Γ1
12 Γ113
Γ121 Γ1
22 Γ123
Γ131 Γ1
32 Γ133
, Γ2 =
Γ211 Γ2
12 Γ213
Γ221 Γ2
22 Γ223
Γ231 Γ2
32 Γ233
, Γ3 =
Γ311 Γ3
12 Γ313
Γ321 Γ3
22 Γ323
Γ331 Γ3
32 Γ333
Usando la proposicion anterior, vamos a calcular
Γ3 =
Γ311 Γ3
12 Γ313
Γ312 Γ3
22 Γ323
Γ313 Γ3
23 Γ333
.
Γ311 =
∂~gr∂r· ~gθ = ~0 · ~gθ = 0,
Γ312 =
∂~gr∂ϕ· ~gθ = (cosϕ cos θ~e1 + cosϕ sin θ~e2 − sinϕ~e3) ·
(−r sin θ
r sinϕ~e1 +
cos θ
r sinϕ~e2
)= 0,
Γ313 =
∂~gr∂θ· ~gθ = (− sinϕ sin θ~e1 + sinϕ cos θ~e2) ·
(−r sin θ
r sinϕ~e1 +
cos θ
r sinϕ~e2
)=
1
r,
Γ322 =
∂~gϕ∂ϕ·~gθ = (−r sinϕ cos θ~e1 − r sinϕ sin θ~e2 − cosϕ~e3)·
(−r sin θ
r sinϕ~e1 +
cos θ
r sinϕ~e2
)= 0,
Γ323 =
∂~gϕ∂θ· ~gθ = (−r cosϕ sin θ~e1 + r cosϕ cos θ~e2) ·
(−r sin θ
r sinϕ~e1 +
cos θ
r sinϕ~e2
)=
cosϕ
sinϕ,
24

Γ333 =
∂~gθ∂θ· ~gθ = (−r sinϕ cos θ~e1 − r sinϕ sin θ~e2) ·
(−r sin θ
r sinϕ~e1 +
cos θ
r sinϕ~e2
)= 0,
y
Γ3 =
0 0 1r
0 0 cosϕsinϕ
1r
cosϕsinϕ
0
.
Se deja como ejercicio al estudiante que compruebe
Γ1 =
0 0 00 −r 00 0 −r sin2 ϕ
Γ2 =
0 1r
01r
0 00 0 sin 2ϕ
2
.
Ejemplo 38 Si {~gr, ~gϕ, ~gθ} designa la base natural esferica, calcule las componentes co-variantes de ∂~gr
∂θ
Proof. Sabemos que
∂~gr∂θ
= Γ113~gr + Γ2
13~gϕ + Γ313~gθ = Γ1
13 |~gr|2 ~gr + Γ2
13 |~gϕ|2 ~gϕ + Γ3
13 |~gθ|2 ~gθ = r sin2 ϕ~gθ.
La siguiente proposicion, que no demostraremos, permite calcular los sımbolos deChristoffel de una base natural ortogonal de una manera bastante rapida.
Proposicion 39 Sea
x1 = x1(x1, x2, x3), (x1, x2, x3) ∈ D ⊂ R3
x2 = x2(x1, x2, x3),
x3 = x3(x1, x2, x3),
un sistema de coordenadas curvilıneas (x1, x2, x3) tal que su base natural asociada {~g1, ~g2, ~g3}
es ortogormal. Si G =
~g1 · ~g1 0 00 ~g2 · ~g2 00 0 ~g3 · ~g13
es su matriz de Gram, se tiene
Γkij =1
2Gkk
(∂Gkk
∂xjδik +
∂Gkk
∂xiδjk −
∂Gij
∂xkδij
)o equivalentemente,
Γ1 =1
2G11
∂G11
∂x1∂G11
∂x2∂G11
∂x3∂G11
∂x2−∂G22
∂x10
∂G11
∂x30 −∂G33
∂x1
Γ2 =
1
2G22
−∂G11
∂x2∂G22
∂x10
∂G22
∂x1∂G22
∂x2∂G22
∂x3
0 ∂G22
∂x3−∂G33
∂x2
25

Γ3 =1
2G33
−∂G11
∂x30 ∂G33
∂x1
0 −∂G22
∂x3∂G33
∂x2∂G33
∂x1∂G33
∂x2−∂G33
∂x3
Ejemplo 40 Sımbolos de Christoffel del sistema de coordenadas cilındricas.
Proof. Se deja al aumno que compruebe que
Γ1 =
0 0 00 −ρ 00 0 0
, Γ2 =
0 1ρ
01ρ
0 0
0 0 0
, Γ3 =
0 0 00 0 00 0 0
.
5 Derivada parcial covariante de un campo vectorial
Supongamos ahora que tenemos un sistema de coordenadas curvilıneas (x1, x2, x3) y expre-samos el campo ~u en estas coordenadas ~u = ~u(x1, x2, x3). Sea {~g1, ~g2, ~g3} la base naturalasociada a las coordenadas curvilineas y {~g1, ~g2, ~g3} su base recıproca. Como ∇~u es untensor de orden dos, admite una representacion diadica de la forma
∇~u = ui,j~gi ⊗ ~gj
para unos ciertos coeficientesui,j = ~gi · ∇~u · ~gj,
que llamaremos derivada parcial covariante del campo ~u, en analogıa con la formula(11) obtenida para las componentes cartesianas.
Proposicion 41 Sea {~g1, ~g2, ~g3} la base natural asociada al sistema de coordenadas curvilıneo(x1, x2, x3) y ~u = ui~gi un campo vectorial. Las derivadas parciales covariantes del campo~u, ui,j vienen dadas por
ui,j =∂ui
∂xj+ Γikju
k (17)
Observacion 42 La formula de las derivadas parciales covariantes (17) contiene dosterminos. El primero es la derivada parcial con respecto a la coordenada curvilınea (similaral coeficiente que aparece cuando se usan coordenadas cartesianas en (11)) y el segundo esun termino que aparece por el hecho de que la base natural no es constante, y que involucralas derivadas de los vectores de la base {~g1, ~g2, ~g3}. Los sımbolos de Cristoffel contienen lascomponentes de estas derivadas y no dependen del campo ~u. Por ello, suelen tabularse paracada sistema de coordenadas y ası no tener que calcularlos cada vez que se quiera derivarun campo.
26

Proof. Dado el campo ~u = uk~gk, segun Proposicion 33
∇~u = ∇(ui~gi
)= ~gi ⊗∇ui + ui∇~gi = ~gi ⊗
(∂ui
∂xj~gj)
+ ui∇~gi =∂ui
∂xj~gi ⊗ ~gj + uk∇~gk (18)
Por tanto, es suficiente ver que∇~gk = Γikj~gi ⊗ ~gj (19)
donde Γikj estan definidos en (??). Ahora bien, teniendo en cuenta (??),
Γikj = ~gi · ∂~gk∂xj
= ~gi · ∇~gk · ~gj
que demuestra (19).En la ultima igualdad hemos usado que ∂~gk
∂xj= ∇~gk · ~gj. En realidad, dado cualquier
campo vectorial ~u, se verifica ∂~u∂xj
= ∇~u ·~gj. Para comprobarlo basta con escribir el campoen coordenadas cartesianas y recordar la definicion de ∇u · ~gj como el vector que contienelos gradientes de las componentes de ~u aplicadas a ~gj,
∇~u · ~gj = (∇ui · ~gj)~ei =∂ui∂xj
~ei =∂~u
∂xj
6 Operadores diferenciales
6.1 El operador divergencia
Definicion 43 Llamaremos divergencia de un campo ~u a la traza del tensor ∇~u. Deno-taremos la divergencia de ~u como ∇ · ~u
Si el campo esta dado en un sistema de coordenadas cartesianas (x1, x2, x3) asociadasa la base ortonormal {~e1, ~e2, ~e3} entonces ~u = ui~ei, y la divergencia de ~u viene dada por
∇ · ~u = Tr
(∂ui∂xj
~ei ⊗ ~ej)
=∂u1∂x1
+∂u2∂x2
+∂u3∂x3
Ejemplo 44 Calcule la divergencia del vector de posicion ~r(x1, x2, x3) = x1~i+ x2~j + x3~k.
Proof.
∇ · ~r =∂
∂x1(x1) +
∂
∂x2(x2) +
∂
∂x3(x3) = 1 + 1 + 1 = 3.
27

Proposicion 45 Si un campo vectorial ~u esta dado en un sistema de coordenadas curvilıneas(x1, x2, x3) con base natural {~g1, ~g2, ~g3} ortogonal entonces ~u = ui~gi, y la divergencia de ~uviene dada por
∇ · ~u = Tr(ui,j~gi ⊗ ~gj
)= u1,1 + u2,2 + u3,3 = ui,i
si adoptamos la notacion de ındices mudos.
Proof. Sabemos que {~e1, ~e2, ~e3} ={
~g1|~g1| ,
~g2|~g2| ,
~e3|~g3|
}es una base ortonormal.
∇u = ui,j~gi ⊗ ~gj = ui,j|~gi||~gj|
(~gi|~gi|⊗ ~gj
|~gj|
)= ui,j
|~gi||~gj|
~ei ⊗ ~ej,
∇ · ~u = Tr
(ui,j|~gi||~gj|
~ei ⊗ ~ej)
= ui,i|~gi||~gi|
= ui,i.
La principal dificultad de esta formula es que precisa del calculo de los sımbolos deCristoffel para calcular las derivadas covariantes. Veremos que esto no es necesario en lapractica.
Proposicion 46 Dado un campo ~u = ui~gi, se tiene
∇ · ~u =1√g
∂
∂xi(√gui),
donde g = det(G) y G es la matriz de Gram de la base natural {~g1, ~g2, ~g3}.
Proof. Recordemos que[~g1, ~g2, ~g3] =
√g.
Derivando esta expresion obtenemos
∂
∂xj√g = [
∂
∂xj~g1, ~g2, ~g3] + [~g1,
∂
∂xj~g2, ~g3] + [~g1, ~g2,
∂
∂xj~g3]
= [Γk1,j~gk, ~g2, ~g3] + [~g1,Γk2,j~gk, ~g3] + [~g1, ~g2,Γ
k3,j~gk]
= (Γ11,j + Γ2
2,j + Γ33,j)[~g1, ~g2, ~g3] = Γiij
√g
Por tanto,
Γiij =∂∂xj√g
√g
y la formula de la divergencia queda
∇ · ~u = ui,i =∂ui
∂xi+ Γikiu
k =∂ui
∂xi+
∂∂xi√g
√gui =
1√g
∂
∂xi(√gui).
28

Ejemplo 47 Calcule la divergencia de los siguientes campo
1. ~u(x1, x2, x3) = x1√x21+x
22
~i+ x2√x21+x
22
~j + x3~k.
2. ~u(x1, x2, x3) = x2√x21+x
22
~i− x1√x21+x
22
~j + x3~k.
Solucion Por la expresion de los campos, las cooedenadas mas adecuadas son las cilındricas.x1 = ρ cos θ,x2 = ρ sin θ,x3 = z,
~gρ = cos θ~i+ sin θ~j,
~gθ = −ρ sin θ~i+ ρ cos θ~j,
~gz = ~k,
~gρ = ~gρ,~gθ = 1
ρ2~gθ,
~gz = ~gz,
√g = ρ.
1. El campo lo escribimos en la forma
~u = cos θ~i+ sin θ~j + z~k.
~u = uρ~gρ + uθ~gθ + uz~gz =
uρ = ~u · ~gρ = 1uθ = ~u · ~gθ = 0uz = ~u · ~gz = z
= ~gρ + z~gz.
∇ · ~u =1√g
∂
∂xi(√
gui)
=1
ρ
(∂
∂ρ(ρuρ) +
∂
∂θ
(ρuθ)
+∂
∂z(ρuz)
)=
1
ρ
(∂
∂ρ(ρ) +
∂
∂θ(0) +
∂
∂z(ρz)
)=
1
ρ(1 + ρ) =
1
ρ+ 1.
2. El campo lo escribimos en la forma
~u = sin θ~i− cos θ~j + z~k.
~u = uρ~gρ + uθ~gθ + uz~gz =
uρ = ~u · ~gρ = 0uθ = ~u · ~gθ = −1
ρ
uz = ~u · ~gz = z
= −1
ρ~gθ + z~gz.
∇ · ~u =1√g
∂
∂xi(√
gui)
=1
ρ
(∂
∂ρ(ρuρ) +
∂
∂θ
(ρuθ)
+∂
∂z(ρuz)
)=
1
ρ
(∂
∂ρ(0) +
∂
∂θ(−1) +
∂
∂z(ρz)
)=
1
ρ(0 + ρ) = 1.
Ejercicio 48 Si ~r(x1, x2, x3) = x1~i + x2~j + x3~k designa el vector de posicion y r = |~r| =√x21 + x22 + x23, determine la divergencia del campo ~u = 1
r3~r.
29

Proof. Por las expresion del campo, lo mas razonable es usar coordenadas esfericas. Recor-dando que ~gr = ~r
ry que el determinante de la matriz de Gram asociada a las coordenadas
esfericas es r4 sin2 ϕ, tenemos que
~u(r, ϕ, θ) =1
r2~gr = ur~gr + uϕ~gϕ + uθ~gθ, con
ur = 1
r2
uϕ = 0uθ = 0
,
y
∇ · ~u =1√g
∂
∂xi(√
gui)
=1
r2 sinϕ
(∂
∂r(sinϕ) +
∂
∂ϕ
(r2 sinϕ · 0
)+
∂
∂θ
(r2 sinϕ · 0
))= 0.
6.2 El operador rotacional
Definicion 49 Llamaremos rotacional de un campo ~u al doble del vector axial ~ω asociadoa la parte antisimetrica de ∇~u. Si denotamos por ∇× ~u el rotacional de ~u entonces
∇× ~u = 2~ω
donde
~ω× =1
2
(∇~u−∇~ut
)Si el campo esta dado en un sistema de coordenadas cartesianas (x1, x2, x3) entonces
~u = ui~ei, y la parte antisimetrica de ∇~u viene dada por
1
2
(∇~u−∇~ut
)=
0 1
2
(∂u1∂x2− ∂u2
∂x1
)12
(∂u1∂x3− ∂u3
∂x1
)−1
2
(∂u1∂x2− ∂u2
∂x1
)0 1
2
(∂u2∂x3− ∂u3
∂x2
)−1
2
(∂u1∂x3− ∂u3
∂x1
)−1
2
(∂u2∂x3− ∂u3
∂x2
)0
Por tanto,
∇× ~u = 2~ω = −(∂u2∂x3− ∂u3∂x2
)~e1 +
(∂u1∂x3− ∂u3∂x1
)~e2 −
(∂u1∂x2− ∂u2∂x1
)~e3,
que puede escribirse en la forma
∇× ~u =
∣∣∣∣∣∣~e1 ~e2 ~e3∂∂x1
∂∂x2
∂∂x3
u1 u2 u3
∣∣∣∣∣∣ .Ejercicio 50 Calcular el rotacional del vector de posicion ~r = x~i+ y~j + z~k.
30

Proof. El campo lo tenemos expresado en coordenadas cartesianas.
~r(x, y, z) = r1(x, y, z)~i+ r2(x, y, z)~j + r3(x, y, z)~k, con
r1(x, y, z) = xr2(x, y, z) = yr3(x, y, z) = z
∇× ~r = −(∂r2∂z− ∂r3∂y
)~i+
(∂r1∂z− ∂r3∂x
)~j −
(∂r1∂y− ∂r2∂x
)~k = 0~i+ 0~j + 0~k = ~0.
Supongamos ahora que el campo esta dado en un sistema de coordenadas curvilıneas(x1, x2, x3) con base natural {~g1, ~g2, ~g3} ortogonal. En este caso tambien tenemos unaformula sencilla para calcular su rotacional sin necesidad de calcular los sımbolos de Cristof-fel.
Proposicion 51 Dado un campo ~u = ui~gi, se tiene
∇× ~u =1√g
∣∣∣∣∣∣~g1 ~g2 ~g3∂∂x1
∂∂x2
∂∂x3
u1 u2 u3
∣∣∣∣∣∣ , (20)
donde g = det(G) y G la matriz de Gram de la base natural {~g1, ~g2, ~g3}.
Proof. Para seguir la demostracion el estudiante debe de ver Ejercicio 75Expresamos el tenso ∇~u en su representacion diadica 2-covariante con respecto a la
base natural {~g1, ~g2, ~g3}, ∇~u = ui,j~gi ⊗ ~gj con ui,j = ~gi · ∇~u · ~gj.
La parte antisimetrica de ∇~u viene dada por
1
2
(∇~u−∇~ut
)=ui,j − uj,i
2~gi ⊗ ~gj.
Ahora bien,
ui,j − uj,i =∂ui∂xj− Γkijuk −
(∂uj∂xi− Γkjiuk
)=∂ui∂xj− ∂uj∂xi
,
de donde se deduce
1
2
(∇~u−∇~ut
)=
1
2
(∂ui∂xj− ∂uj∂xi
)~gi ⊗ ~gj
=1
2
(∂u1∂x2− ∂u2∂x1
)(~g1 ⊗ ~g2 − ~g2 ⊗ ~g1)
+1
2
(∂u2∂x3− ∂u3∂x2
)(~g2 ⊗ ~g3 − ~g3 ⊗ ~g2)
+1
2
(∂u3∂x1− ∂u1∂x3
)(~g3 ⊗ ~g1 − ~g1 ⊗ ~g3)
=1
2
(∂u1∂x2− ∂u2∂x1
)(~g2 × ~g1)×+
1
2
(∂u2∂x3− ∂u3∂x2
)(~g3 × ~g2)×
+1
2
(∂u3∂x1− ∂u1∂x3
)(~g1 × ~g3)×
31

Por tanto, el doble del vector axial asociado ~ω viene dado por
2~ω =
(∂u1∂x2− ∂u2∂x1
)(~g2 × ~g1) +
(∂u2∂x3− ∂u3∂x2
)(~g3 × ~g2) +
(∂u3∂x1− ∂u1∂x3
)(~g1 × ~g3)
= −(∂u1∂x2− ∂u2∂x1
)~g3√g−(∂u2∂x3− ∂u3∂x2
)~g1√g−(∂u3∂x1− ∂u1∂x3
)~g2√g
que coincide con (20)
Ejemplo 52 Sea {~e1, ~e2, ~e3} una base ortonormal y (x1, x2, x3) sus coordenadas cartesianasasociadas. Consideramos los campos vectoriales
~r(x1, x2, x3) = x1~e1 + x2~e2 + x3~e3, campo vecorial posicion,
~u(x1, x2, x3) = f(r)~r(x1, x2, x3), r = (x21 + x22 + x33)1/2, f ∈ C1(0,∞).
1. Calcule ∇ · ~u.
2. Calcule ∇× ~u
Proof. Por la forma de los campos vectoriales, es aconsejable utilizar coordenadas esfericas.x1 = r sinϕ cos θx2 = r sinϕ sin θx3 = r cosϕ
,
~gr = sinϕ cos θ~e1 + sinϕ sin θ~e2 + cosϕ~e3~gϕ = r cosϕ cos θ~e1 + r cosϕ sin θ~e2 − r sinϕ~e3~gθ = −r sinϕ sin θ~e1 + r sinϕ cos θ~e2
,
~gr = ~gr~gϕ = 1
r2~gϕ
~gθ = 1r2 sin2 ϕ
~gθ
.
Expresamos el campo vectorial ~u en terminos de sus coordenadas contravariantes y vari-antes con respecto a la base natural esferica.
~u(r, ϕ, θ) = f(r)r sinϕ cos θ~e1 + f(r)r sinϕ sin θ~e2 + f(r)r cosϕ~e3,
~u = ur~gr + uϕ~gϕ + uθ~gθ =
ur = ~u · ~gr = rf(r)uϕ = ~u · ~gϕ = 0uθ = ~u · ~gθ = 0
= rf(r)~gr,
~u = ur~gr + uϕ~g
ϕ + uθ~gθ =
ur = ~u · ~gr = rf(r)uϕ = ~u · ~gϕ = 0uθ = ~u · ~gθ = 0
= rf(r)~gr.
Recordamos que detG = r4 sin2 ϕ, por lo tanto√g = r2 sinϕ.
1. ∇ · ~u = 1√g∂∂xi
(√gui) = 1
r2 sinϕ∂∂r
(r2 sinϕrf(r)) = 3r2f(r)+r3f ′(r)r2
= 3f(r) + rf ′(r).
2. ∇× ~u = 1r2 sinϕ
∣∣∣∣∣∣~gr ~gϕ ~gθ∂∂r
∂∂ϕ
∂∂θ
ur uϕ uθ
∣∣∣∣∣∣ = 1r2 sinϕ
∣∣∣∣∣∣~gr ~gϕ ~gθ∂∂r
∂∂ϕ
∂∂θ
rf(r) 0 0
∣∣∣∣∣∣= 1
r2 sinϕ
(∂∂θ
(rf(r))~gϕ − ∂∂ϕ
(rf(r))~gθ
)= 0.
32

Ejemplo 53 Dado el campo vectorial, en coordenadas cartesianas,
~u(x1, x2, x3) =x2√x21 + x22
~i− x1√x21 + x22
~j + x3~k,
1. calcule su rotacional en coordenadas cartesianas y expreselo en terminos de la basenatural cilındrica;
2. exprese el campo en terminos de la base natural cilındrica y calcule directamente elrotacional en terminos esta base.
Solucion
1. ~u(x1, x2, x3) = u1(x1, x2, x3)~i+ u2(x1, x2, x3)~j + u3(x1, x2, x3)~k,
donde
u1(x1, x2, x3) = x2√
x21+x22
u2(x1, x2, x3) = − x1√x21+x
22
u3(x1, x2, x3) = x3
.
∇×~u =
∣∣∣∣∣∣~i ~j ~k∂∂x1
∂∂x2
∂∂x3
u1 u2 u3
∣∣∣∣∣∣ =
(u3∂x2− ∂u2∂x3
)~i+
(u1∂x3− ∂u3∂x1
)~j+
(u2∂x1− ∂u1∂x2
)~k = − 1√
x21 + x22
~k.
Lo expresamos ahora en la base natural cilındrica.
∇× ~u(ρ, θ, z) = −1
ρ~k.
∇× ~u = vρ~gρ + vθ~gθ + vz~gz =
vρ = (∇× ~u) · ~gρ = 0vθ = (∇× ~u) · ~gθ = 0vz = (∇× ~u) · ~gz = −1
ρ
= −1
ρ~gz.
2. Empezamos expresando ~u en terminos de las coordenadas covariantes con respecto ala base natural cilındrica.
~u(ρ, θ, z) = sin θ~i− cos θ~j + z~k.
~u = uρ~gρ + uθ~g
θ + uz ~gz =
uρ = ~u · ~gρ = 0uθ = ~u · ~gθ = −ρuz = ~u · ~gz = z
= −ρ~gθ + z~gz.
El rotacional en coordenadas cilındricas esta dado por
∇× ~u(ρ, θ, z) =1√g∣∣∣∣∣∣
~gρ ~gθ ~gz∂∂ρ
∂∂θ
∂∂z
uρ uθ uz
∣∣∣∣∣∣ =1
ρ
(∂uz∂θ− ∂uθ
∂z
)+
1
ρ
(∂uρ∂z− ∂uz
∂ρ
)+
1
ρ
(∂uθ∂ρ− ∂uρ
∂θ
)= −1
ρ~gz.
33

6.3 Los operadores Hessiano y Laplaciano
Definicion 54 Llamaremos Hessiano de un campo escalar f al gradiente del campo vec-torial ∇f . Denotaremos al Hessiano de f por
∇⊗∇f = ∇(∇f).
Si el campo esta dado en un sistema de coordenadas cartesianas (x1, x2, x3) entonces∇f = ∂f
∂xi~ei, y el Hessiano viene dada por
∇⊗∇f = ∇(∇f) = ∇(∂f
∂xi~ei
)=
∂2f
∂xi∂xj~ei ⊗ ~ej
Ejercicio 55 Calcular el Hessiano del campo escalar f = x2 + y2 + z4.
Proof. El Hessiano del campo escalar f es el tensor de segundo orden ∇(∇f). La matriz
de componentes del Hessiano con respecto a la base canonica{~i,~j,~k
}es
∂2f∂2x
∂2f∂y∂x
∂2f∂z∂x
∂2f∂x∂y
∂2f∂2y
∂2f∂z∂y
∂2f∂x∂z
∂2f∂y∂z
∂2f∂2z
=
2 0 00 2 00 0 12z2
.
Definicion 56 Llamaremos Laplaciano de un campo escalar f a la divergencia de ∇f ,que coincide con la traza de su Hessiano. Denotaremos al Laplaciano de f por
∆f = ∇2f = ∇ · ∇f.
Si el campo esta dado en un sistema de coordenadas cartesianas (x1, x2, x3) entonces
∆f =∂2f
∂x21+∂2f
∂x22+∂2f
∂x23.
Ejercicio 57 Calcular el Laplaciano del campo escalar f = x2 + y2 + z4.
Proof. ∆f = ∂2
∂2x+ ∂2
∂2y+ ∂2
∂2z= 2 + 2 + 12z2 = 4 + 12z2.
Supongamos ahora que el campo esta dado en un sistema de coordenadas curvilıneas(x1, x2, x3) con base natural {~g1, ~g2, ~g3}. En este caso tambien tenemos una formula sencillapara calcular su Laplaciano sin necesidad de calcular los sımbolos de Cristoffel.
Proposicion 58 Dado un campo escalar f , se tiene
∆f =1√g
∂
∂xi(
√g
|~gi|2∂f
∂xi) =
1√g
(∂
∂x1
( √g
|~g1|2∂f
∂x1
)+
∂
∂x2
( √g
|~g2|2∂f
∂x2
)+
∂
∂x3
( √g
|~g3|2∂f
∂x3
)),
(21)donde g = det(G) y G la matriz de Gram de la base natural {~g1, ~g2, ~g3} ortogonal.
34

Proof. Basta combinar las ecuaciones de ∇f en coordenadas curvilıneas con las de ladivergencia de ∇f .
Si ∇f lo expresamos en teminos de sus componentes contravariantes con respecto a labase natural {~g1, ~g2, ~g3} ortogonal
∇f =∂f
∂xj~gj =
(1
|~gi|2∂f
∂xj
)~gi,
despues de la expresion de la divergencia en coordenadas curvilıneas, tenemos
∆f = ∇ · ∇f =1√g
∂
∂xi
( √g
|~gi|2∂f
∂xj
).
Ejercicio 59 Calcular el Laplaciano del campo
f(x, y, z) = g(r), r = (x2 + y2 + z2)1/2, g ∈ C2((0,∞)),
usando coordenadas esfericas.
Proof. En coordenadas esferica el campo escalar f esta dado por
f(r, ϕ, θ) = g(r).
Recordamos la matriz de Gram, su inversa y su determinante de la base natural esferica
G =
1 0 00 r2 00 0 r2 sinϕ
, g = detG = r4 sin2 ϕ, G−1 =
1 0 00 1
r20
0 0 1r2 sin2 ϕ
.
Ya que Gij = 0 si ı 6= j
∆f =1√g
{∂
∂r
(√gG11∂f
∂r
)+
∂
∂ϕ
(√gG22 ∂f
∂ϕ
)+
∂
∂θ
(√gG33∂f
∂θ
)},
y como ∂f∂ϕ
= ∂f∂θ
= 0
∆f(r, ϕ, θ) =1
r2 sinϕ
∂
∂r
(r2 sinϕg′(r)
)=
1
r2∂
∂r
(r2g′(r)
)=
2g′(r)
r+ g′′(r).
En coordenadas cartesianas
∆f(x, y, z) =2
(x2 + y2 + z2)1/2g′((x2 + y2 + z2)1/2) + g′′((x2 + y2 + z2)1/2).
35

Proposicion 60 El rotacional del gradiente de un campo escalar f es siempre nulo,
∇×∇f = 0. (22)
La divergencia del rotacional de un campo vectorial ~u es siempre nula,
∇ · (∇× ~u) = 0. (23)
Proof. Se comprueban sin dificultad usando sus expresiones en coordenadas carte-sianas.
Mas adelante veremos un recıproco de la proposicion anterior. Concretamente, veremosque bajo ciertas condiciones los campos de rotacional nulo pueden escribirse como gradi-entes de un campo escalar, y que los campos de divergencia nula pueden escribirse comorotacionales de un campo vectorial.
La siguiente proposicion contiene algunas reglas sencillas que facilitan el calculo deoperadores diferenciales
Proposicion 61 Sea f un campo escalar y ~u, ~v dos campos vectoriales. Se verifican lassiguientes identidades:
1. ∇ · (f~u) = f∇ · ~u+∇f · ~u
2. ∇× (f~u) = f∇× ~u+∇f × ~u
3. ∇ · (~u× ~v) = ∇× ~u · ~v − ~u · ∇ × ~v
4. ∇× (~u× ~v) = ~v · ∇~u− ~u · ∇~v + (∇ · ~v)~u− (∇ · ~u)~v
7 Ejercicios propuestos
7.1 Seccion 1. Sistemas de coordenadas.
Ejercicio 62 Dados los puntos P1 = (1, 1, 1), P2 = (1,−√
3,−2) y P3 = (−2,−2, 0) encoordenadas cartesianas, determine estos en sus coordenadas cilındricas.
Ejercicio 63 Dados los puntos Q1 =(2, 2π
3,−3
), Q2 =
(4, 3π
2, 0)
y Q3 =(3, 5π
6, 1)
encoordenadas cilındricas, determine estos en sus coordenadas cartesianas.
Ejercicio 64 Dados los puntos P1 = (0,−2, 0), P2 =(√
32,√
32, 1)
y P3 =(
0, 3√2,− 3√
2
)en coordenadas cartesianas, determine estos en sus coordenadas esfericas.
Ejercicio 65 Dados los puntos Q1 =(1, 5π
6, π), Q2 =
(3, 5π
6, 5π
6
)y Q3 =
(√2, 2π
6, π3
)en
coordenadas esfericas, determine estos en sus coordenadas cartesianas.
Ejercicio 66 Determinar las lıneas coordenadas de las coordenadas esfericas.
36

7.2 Seccion 2. Coordenadas curvilıneas.
Ejercicio 67 Sea (x, y, z) las coordenadas cartesianas asociadas a una base ortonormal{~e1, ~e2, ~e3}. Consideramos la transformacion
x = x(u, v, θ) = uv cos θ, (u, v, θ) ∈ R2 × (0, 2π),y = y(u, v, θ) = uv sin θ,z = z(u, v, θ) = 1
2(u2 − v2).
.
1. Demuestre que la transformacion define un sistema de coordenadas curvilıneas (u, v, θ)en un abierto que contiene al punto
(1, 1, π
2
).
2. Determine la base natural {~gu, ~gv, ~gθ}, la matriz de Gram y base recıproca en(1, 1, π
2
).
Solucion {~gu, ~gv, ~gθ} = {~e2 + ~e3, ~e2 − ~e3,−~e1}, G =
2 0 00 2 00 0 1
,{~gu, ~gv, ~gθ
}={
12(~e2 + ~e3),
12(~e2 − ~e3),−~e1
}.
Ejercicio 68 Calcular el vector de posicion en las bases naturales asociadas a los sistemasde coordenadas cilındrico y esferico.
Solucion El vector de posicion en coordenadas cartesianas es ~r(x1, x2, x3) = x1~i+x2~j+x3~k.En la base natural cilındrica ~r(ρ, θ, t) = ρ~gρ(ρ, θ, t) + t~gz(ρ, θ, t) = ρ~gρ + t~gz. En la basenatural esferica ~r(r, ϕ, θ) = r~gr(r, ϕ, θ) = r~gr.
Ejercicio 69 Consideramos l la transformacion
x1 = 12
(u2 − v2) , (u, v, w) ∈ R× (0,∞)× R,x2 = uv,x3 = w.
1. Demuestre que define un sistema de coordenadas curvilıneas (u, v, w). Estas coorde-nadas son llamadas cilındrico-parabolicas.
2. Determine las lineas coordenadas es (u0, v0, w0).
3. Calcule la base natural asociada al sistema de coordenadas colındrico-elıpticas en unpunto generico (u, v, w).
37

7.3 Seccion 3. Campos tensoriales.
Ejercicio 70 Calcule las superficies de nivel asociadas a los campos escalares
1. f1(x1, x2, x3) = 2x+ 3z, (x1, x2, x3) ∈ R3.
2. f2(x1, x2, x3) = x− y2, (x1, x2, x3) ∈ R3.
3. f3(x1, x2, x3) = z + x2 − y2, (x1, x2, x3) ∈ R3.
4. f4(x1, x2, x3) = z − x2 − y2, (x1, x2, x3) ∈ R3.
5. f5(x1, x2, x3) = z2 + 1− x2 − 4y2, (x1, x2, x3) ∈ R3.
Tome como C los valores {2, 0,−1}
Ejercicio 71 El capitan Ralph tiene dificultades cerca del lado soleado de Mercurio. Latemperatura del casco de la nave, cuando el esta en la posicion (x, y, z); estara dada porT (x, y, z) = e−x
2−2y2−3z2, donde x, y y z estan medidas en metros. Actualmente el esta en(1, 1, 1).
1. ¿En que direccion debera avanzar para disminuir mas rapido la temperatura?.
2. Si la nave viaja a e8 metros por segundo, ¿con que rapidez decrecera la temperaturasi avanza en esa direccion?.
3. Desafortunadamente, el metal del casco se cuarteara si se enfrıa a una tasa mayorque√
14e2 grados por segundo. Describir el conjunto de direcciones posibles en lasque puede avanzar para bajar la temperatura a una tasa no mayor que esa?
Ejercicio 72 Sea{~i,~j,~k
}la base ortonormal estandar y designamos por (x1, x2, x3) sus
coordenadas cartesianas asociadas. Consideramos el campo escalar difinido en estas coor-denadas
h(x1, x2, x3) = x2 + x21 + x22 + x23, (x1, x2, x3) ∈ R3.
1. Exprese h en terminos de las coordenadas cilındricas y esfericas.
2. Obtenga ∇h en terminos de la base natural cilındrica y su recıproca.
3. Obtenga ∇h en terminos de la base natural esferica y su recıproca.
Solucion 1. f(ρ, θ, z) = h(x1(ρ, θ, z), x2(ρ, θ, z), x3(ρ, θ, z)) = ρ sin θ + ρ2 + z2, g(r, ϕ, θ) =h(x1(r, ϕ, θ), x2(r, ϕ, θ), x3(r, ϕ, θ)) = r sinϕ sin θ + r2; 2. ∇f(ρ, θ, z) = (sin θ + 2ρ)~gρ +ρ cos θ~gθ + 2z~gz = (sin θ + 2ρ)~gρ + cos θ
ρ~gθ + 2z~gz; 3. ∇g(r, ϕ, θ) = (sinϕ sin θ + 2r)~gr +
r cosϕ sin θ~gϕ + r sinϕ cos θ~gθ = (sinϕ sin θ + 2r)~gr + cosϕ sin θr
~gϕ + cos θr sinϕ
~gθ.
38

Ejercicio 73 Sea {~e1, ~e2, ~e3} una base ortonormal y definimos las campos escalares y vec-toriales, en coordenadas cartesianas,
f(x1, x2, x3) = x1x3, ~u(x1, x2, x3) = x2x3~e1+x3x1~e2+x1x2~e3, ~v(x1, x2, x3) = x2~e1+x3~e2+x1~e3.
Determine la representiacion diadica con respecto a la base ortonormal {~e1, ~e2, ~e3} de lostensores
1. ∇~v.
2. ∇~u.
3. ∇(f~u+ ~v).
Solucion 1. ~e1 ⊗ ~e2 + ~e2 ⊗ ~e3 + ~e3 ⊗ ~e1; 2. x3~e1 ⊗ ~e2 + x2~e1 ⊗ ~e3 + x3~e2 ⊗ ~e1 + x1~e2 ⊗ ~e3 +x2~e3⊗~e1 + x1~e3⊗~e2; 3. x2x
23~e1⊗~e1 + (x1x
23 + 1)~e1⊗~e2 + (x1x2x3 + x1x2)~e1⊗~e3 + (x1x
23 +
x1x3)~e2⊗~e1 + (x21x3 + x21 + 1)~e2⊗~e3 + (x1x2x3 + x1x2 + 1)~e3⊗~e1 + x21~e3⊗~e2 + x1x2~e3⊗~e3.
7.4 Seccion 4. Sımbolos de Chritoffel.
Ejercicio 74 La posicion de un movil en el instante t viene dada por ρ(t) = t2, θ(t) = t yz(t) = sin t, donde (ρ, θ, z) son lascoordenadas cilındricas. En terminos de la base naturalcilındrica calculela posicion y velocidad del movil en el instante t.
Proof. Empezamos calculando la posicion.
~r(t) = x1(t)~i+ x2(t)~j + x3(t)~k = ρ(t)~gρ(ρ(t), θ(t), z(t)) + z(t)~gz(ρ(t), θ(t), z(t))
= t2~gρ(t2, t, sin t) + sin t~gz(t
2, t, sin t).
Ahora calculamos la velocidad
~v(t) =d
dt~r(t) = 2t~gρ(t
2, t, sin t)+t2d
dt~gρ(t
2, t, sin t)+cos t~gz(t2, t, sin t)+sin t
d
dt~gz(t
2, t, sin t),
d
dt~gρ(t
2, t, sin t) =∂~gρ∂ρ
(t2, t, sin t)2t+∂~gρ∂θ
(t2, t, sin t) +∂~gρ∂z
(t2, t, sin t) cos t
= 2t(Γ111(t
2, t, sin t)~gρ(t2, t, sin t) + Γ2
11(t2, t, sin t)~gθ(t
2, t, sin t)
+Γ311(t
2, t, sin t)~gθ(t2, t, sin t)~gz(t
2, t, sin t))
+(Γ112(t
2, t, sin t)~gρ(t2, t, sin t)
+Γ212(t
2, t, sin t)~gθ(t2, t, sin t) + Γ3
12(t2, t, sin t)~gθ(t
2, t, sin t)~gz(t2, t, sin t)
)+ cos t
(Γ113(t
2, t, sin t)~gρ(t2, t, sin t) + Γ2
13(t2, t, sin t)~gθ(t
2, t, sin t)
+Γ313(t
2, t, sin t)~gθ(t2, t, sin t)~gz(t
2, t, sin t))
= 2t (0 · ~gρ + 0 · ~gθ + 0 · ~gz) +
(0 · ~gρ +
1
ρ(t)· ~gθ + 0 · ~gz
)+ cos t (0 · ~gρ
39

+0 · ~gθ + 0 · ~gz) =1
t2~gθ(t
2, t, sin t),
d
dt~gz(t
2, t, sin t) = 2t∂~gz∂ρ
+∂~gz∂θ
+ cos t∂~gz∂z
= 2t(Γ131~gρ + Γ2
31~gθ + Γ331~gz
)+(Γ132~gρ + Γ2
32~gθ + Γ332~gz
)+ cos t
(Γ133~gρ + Γ2
33~gθ + Γ333~gz
)= 0,
entonces~v(t) = 2t~gρ(t
2, t, sin t) + ~gθ(t2, t, sin t) + cos t~gz(t
2, t, sin t).
7.5 Seccion 5. Derivada covariante.
Ejercicio 75 Sea ~u(x1, x2, x3) un campo vetorial . Supongamos que la transformacion
x1 = x1(x1, x2, x3), (x1, x2, x3) ∈ D abierto de R3,
x2 = x2(x1, x2, x3),
x3 = x3(x1, x2, x3),
define una coordenadas curvilıneas. Definir ui,j y demostrar que ui,j = ∂ui∂xj− Γkijuk.
Proof. Los valores ui,j seran las componentes del tensor ∇u en la siguiente formadiadica
∇~u = ui,j~gi ⊗ ~gj.
Aunque el calculo de estos valores se puede hacer de forma analoga a como calculamos ui,jarriba, vamos a cambiar ligeramente el argumento por ilustrar otra forma de realizar elmismo calculo.
Sea {~e1, ~e2, ~e3} una base ortonormal y (x1, x2, x3) las coordenadas cartesianas asociadas.Supongamos que la transformacion
x1 = x1(x1, x2, x3), (x1, x2, x3) ∈ D abierto de R3,
x2 = x2(x1, x2, x3),
x3 = x3(x1, x2, x3),
y sea {~g1, ~g2, ~g3} la base natural asociada al sistema de coordenadas curvilıneas (x1, x2, x3).Consideramos el campo vectorial ~u expresado en termino de las cooordenada covariantescon respecto a {~g1, ~g2, ~g3}
~u = ui~gi, ui = ~u · ~gi.
Vamos a calcular la representacion diadica 2-covariante del tensor ∇~u
∇~u = ui,j~gi ⊗ ~gj,
donde a los coeficientes ui,j = ~gi · ∇~u · ~gj le llamaremos derivada parcial covariante delcampo ~u.
ui,j = ~gi · ∇~u · ~gj = ui,j = ~gi · ∇(uk~gk) · ~gj = ~gi ·
(~gk ⊗∇uk + uk∇~gk
)· ~gj
40

= ~gi ·(~gk∇uk
)· ~gj + ~gi ·
(uk∇~gk
)· ~gj = ~gi · (∇uk · ~gj)~gk + uk~gi ·
∂~gk
∂xj
= ∇ui~gj + uk~gi ·∂~gk
∂xj=∂ui∂xj
+ uk~gi ·∂~gk
∂xj.
Derivamos con respecto a xj la identidad ~g1 · ~gk = δ ki
~gk · ∂~gi∂xj
+ ~gi ·∂~gk
∂xj= 0 =⇒ ~gi ·
∂~gk
∂xj= −~gk · ∂~gi
∂xj= −Γkij,
de donde
ui,j =∂ui∂xj− ukΓkij.
Ejercicio 76 Sea {~e1, ~e2, ~e3} una base ortonormal y (x1, x2, x3) sus componentes carte-sianas asociadas. Consideramos la transformacion
x1(u, v, w) = 2u+ v, u, v, w ∈ R,x2(u, v, w) = u− 2v,x3(u, v, w) = w2.
1. Demuestre que la transformacion define un sistema de coordenadas curvilıneas en elabierto D = {(u, v, w) ∈ R3 : w 6= 0}.
2. Obtenga la base natural curvilınea {~gu, ~gv, ~gw}, su recıproca y las matrices de Gramde estas bases.
3. Considere el campo vectorial
~r(u, v, w) = (2u+ v)~e1 + (u− 2v)~e2 + w2~e3.
(Vector de posicion). Determine las componentes contravariantes de ~r(u, v, w) conrespecto a la base {~gu, ~gv, ~gw}.
4. Cacule la derivada parcial covariante del campo ~r. (La matriz 1-contravariante 1-covariante del tensor ∇~r con respecto a la base {~gu, ~gv, ~gw}.
Solucion 2. {~gu, ~gv, ~gw} = {2~e1 + ~e2, ~e1 − 2~e2, 2w~e3}, {~gu, ~gv, ~gw} ={
25~e1 + 1
5~e2,
15~e1 − 2
5~e2,
12w~e3}
,
G = (Gij) =
5 0 00 5 00 0 4w2
, G−1 = (Gij) =
15
0 00 1
50
0 0 14w2
; 3. ~r(u, v, w) = r1(u, v, w)~g1 +
r2(u, v, w)~g2 + r3(u, v, w)~g3 = u~g1 + v~g2 + w2~g3; 4. Γ1 =
0 0 00 0 00 0 0
, Γ2 =
0 0 00 0 00 0 0
,
Γ3 =
0 0 00 0 00 0 1
w
, (uij) =
∂r1
∂u+ Γ1
k1rk ∂r1
∂v+ Γ1
k2rk ∂r1
∂w+ Γ1
k3rk
∂r2
∂u+ Γ2
k1rk ∂r2
∂v+ Γ2
k2rk ∂r2
∂w+ Γ2
k3rk
∂r3
∂u+ Γ3
k1rk ∂r3
∂v+ Γ3
k2rk ∂r3
∂w+ Γ3
k3rk
=
1 0 00 1 00 0 1
.
41

Ejercicio 77 Sea {~e1, ~e2, ~e3} una base ortonormal y (x1, x2, x3) sus componentes carte-sianas asociadas. Consideramos la transformacion
x1(u, v, w) = 2u+ v, u, v, w ∈ R,x2(u, v, w) = u− 2v,x3(u, v, w) = w2.
1. Demuestre que la transformacion define un sistema de coordenadas curvilıneas en elabierto D = {(u, v, w) ∈ R3 : w 6= 0}.
2. Obtenga la base natural curvilınea {~gu, ~gv, ~gw}, su recıproca y las matrices de Gramde estas bases.
3. Determine la matriz de cambio de la base {~gu, ~gv, ~gw} a la base {~e1, ~e2, ~e3}.
4. Considere el campo vectorial
~r(u, v, w) = (2u+ v)~e1 + (u− 2v)~e2 + w2~e3.
(Vector de posicion). Calcule la matriz 2-covariante del tensor T = ~r⊗~r con respectoa las bases {~e1, ~e2, ~e3} y {~gu, ~gv, ~gw}.
Solucion Matriz 2-covariante del tensor T = ~r ⊗ ~r con respecto a la base {~e1, ~e2, ~e3} (2u+ v)2 (2u+ v)(u− 2v) (2u+ v)w2
(u− 2v)(2u+ v) (u− 2v)2 (u− 2v)w2
w2(2u+ v) w2(u− 2v) w4
, matriz 2-covariante del tensor T =
~r ⊗ ~r con respecto a la base {~g1, ~g2, ~g3}
25w2 25uv 10uw3
25uv 25v2 10vw3
10uw3 10vw3 4w6
.
7.6 Secion 6. Operadores diferenciales
Ejercicio 78 Si ~r(x1, x2, x3) = x1~i + x2~j + x3~k designa el vector de posicion y r = |~r| =√x21 + x22 + x23, determine la divergencia del campo ~u = rn~r, n ∈ Z.
Solucion (n+ 3)rn.
Ejercicio 79 Sea ~u un campo vectorial. ¿Tiene ∇× ~u que ser perpendicular a ~u?.
Solucion x1~i+ x1x2~j + ~k.
Ejercicio 80 Calcule el rotacional de los siguientes campos vectoriales.
1. ~u = x~i− y~j,
2. ~u = ~gθρ2
+ ρ2~gρ,
42

3. ~u = ρ~gρ + zρ2~gθ + θ~gz,
4. ~u = ϕ~gr + 1r~gϕ + θ
r2 sin2 ϕ~gθ,
5. ~u = 2xyz~i+ (x2z + 2yz)~j + y(x2 + y)~k,
6. ~u = 2ρ~gρ + z ~gz.
Solucion Todos los campos tiene rotacional nulo.
43