TESINA - · PDF fileNube de puntos: Conjunto de coordenadas XYZ en un sistema de coordenadas...
74
1 TESINA MAESTRO EN MANUFACTURA AVANZADA PRESENTA ING. JORGE ADAN ROMERO GUERRERO Ciudad Sahagún, Hidalgo, Noviembre 2015. Elaboración de Modelos Electrónicos Tridimensionales Inteligentes usando la tecnología de escaneo láser. PARA OBTENER EL GRADO
Transcript of TESINA - · PDF fileNube de puntos: Conjunto de coordenadas XYZ en un sistema de coordenadas...
1
TESINA
MAESTRO EN
MANUFACTURA
AVANZADA
PRESENTA
ING. JORGE ADAN ROMERO GUERRERO
Ciudad Sahagún, Hidalgo, Noviembre 2015.
Elaboración de Modelos Electrónicos
Tridimensionales Inteligentes usando la tecnología de
escaneo láser.
PARA OBTENER EL GRADO

2
RESUMEN
Con la finalidad de continuar proporcionando servicios de alto valor agregado para la
industria, CIATEQ ha profundizado en el desarrollo de ingeniería concurrente en
diferentes aspectos, entre ellos la asimilación y el empleo de tecnologías de
reconocimiento láser. Lo que se pretende es crear manuales para capacitación al
personal e ir implementando el desarrollo de estándares y procedimientos para que se
integren a las fortalezas tecnológicas del centro.
La aplicación de la tecnología de reconocimiento láser, promueve aspectos de
competitividad y el empleo de tecnología de punta, incluyendo el manejo eficiente de
recursos que son materia de la ingeniería actual. Junto con la tecnología de escaneo,
las METI’s (Modelos Electrónicos Tridimensionales Inteligentes) permiten obtener el diseño
y representación tridimensional de las instalaciones, ello conlleva a obtener el análisis de
interferencias y futuras o inmediatas modificaciones, además de tener de manera rápida
y sencilla la representación del proyecto y mejora el sentido de apreciación del mismo.
La característica del Modelo Electrónico Tridimensional Inteligente (METI) es la
capacidad para relacionar cada uno de los elementos que lo componen, asociados a
una colección de datos interrelacionados y organizados en tablas, columnas y filas,
interpretado por medio de un lenguaje de consulta estructurado (Base de Datos), cuya
capacidad permite agregar, modificar atributos o asociar otras bases de datos, es decir
que podemos tener acceso a toda información que se introduce de manera manual
por medio de la Base de Datos de un objeto tridimensional del modelo con darle solo un
click.
Lo que se documentara a lo largo de esta tesina, es la obtención de un modelo
electrónico tridimensional utilizando el equipo de Ciateq a modo de referencia y guía
en los futuros proyectos
Palabras clave: METI’s, Escaneo láser, Base de Datos.
3
GLOSARIO
3D: Tridimensional, caracterizado por las coordenadas cartesianas (x, y, z).
Archivos nativos: Cualquier dato tomado por un escáner láser que esté sin procesar.
Esto puede incluir diferentes fuentes de error y datos periféricos
Artefactos del escaneado: Irregularidades en la escena resultantes de un proceso de
escaneado.
As-built: Describe cómo se construyó una estructura a partir de su diseño.
As-is: Describe el estado actual de una estructura en un momento dado.
Atributos - Características intrínsecas que definen a los elementos o componentes de un
equipo o instalación industrial.
Base de Datos - Una colección de datos relacionados y organizados en tablas, columnas
y filas, recuperable por medio de un lenguaje de consulta estructurado.
CAD- Aplicaciones de cómputo para diseño gráfico o ilustraciones técnicas en dos o tres
dimensiones.
Elemento - Cada una de las partes de un modelo electrónico con atributos propios
GPS (Sistema de Posicionamiento Global): El sistema de posicionamiento global –un
sistema de posicionamiento por satélite norteamericano utilizado para posicionar
aeronaves durante un levantamiento aéreo, también usado como técnica para
efectuar levantamientos sobre el terreno. Rusia y Europa están trabajando en sistemas
similares llamados GLONASS y GALILEO, respectivamente.
Inteligencia - Característica del Modelo Electrónico (2D y 3D) con capacidad para
relacionar cada uno de los elementos que lo componen, asociados a una Base de
Datos, cuya capacidad permite agregar o modificar atributos o asociar otras bases de
datos
Láser (acrónimo de Light Amplification by Simulated Emission of Radiation): Haz intenso
de luz que produce imágenes con impulsos electrónicos.
Modelo Electrónico Tridimensional Inteligente (METI) - Es la representación gráfica a
escala 1:1 de una instalación industrial realizada en tres dimensiones, mediante un
sistema CADD o CAE y conformada por un conjunto de elementos con atributos
asociados a una base de datos relacional.

4
Nube de puntos: Conjunto de coordenadas XYZ en un sistema de coordenadas
tridimensional. También puede incluir información adicional, como los valores de color
y de reflectividad.
Orientación del escáner: Orientación del escáner en un sistema de coordenadas
euclídeo tridimensional.
Origen del escáner: Origen de un sistema de coordenadas arbitrario en el que se
realizan los escaneados estáticos. Cuando el origen del escáner se transforma al
sistema de coordenadas local, se convierte en la posición del escáner.
Registro: Proceso de transformación de las nubes de puntos a un sistema de
coordenadas común. Este proceso también se conoce con el nombre de alineación o
consolidación.
Renderizado: Proceso de generar imágenes a partir de un modelo 3D informático, sin
las limitaciones del hardware de gráficos. El modelo es una descripción de objetos
tridimensionales en un lenguaje o estructura de datos estrictamente definidos. Debería
contener la geometría, los puntos de vista, la textura, y la información de iluminación y
sombreado.
Ruido del escáner: Nivel de desviación de una nube de puntos respecto de una
superficie real, provocado por el ángulo de inclinación, el tamaño de la huella del
punto, la reflectividad, las condiciones atmosféricas, etc.
SEPP. Separación entre un punto dado y el siguiente más cercano, en milímetros, del
MNP.

5
ABREVIATURAS.
2D Dos Dimensiones.
3D Tres Dimensiones.
CAD Diseño y Dibujo Asistido por Computadora.
DFP´s Diagramas de Flujo de Proceso.
DGN Formato gráfico de CAD.
DTI´s Diagramas de Tubería e Instrumentación.
DWG Formato gráfico de CAD.
HVAC Heating Ventilation and Air Conditioner (Calefacción, Ventilación y Aire
Acondicionado).
MEBI Modelo Electrónico Bidimensional Inteligente.
METI Modelo Electrónico Tridimensional Inteligente.
NRF Norma de Referencia.

6
ÍNDICE DE CONTENIDO
RESUMEN……………………………………………………………………………………………… i
GLOSARIO……………………………………………………………………………………………. ii
ABREVIATURAS……………………………………………………………………………………….. iii
ÍNDICE DE CONTENIDO ………………………………………………………………………….... iv
ÍNDICE DE FIGURAS ………………………………………………………………………………… v
CAPÍTULO 1 INTRODUCCIÓN……………………………………………………………………… 11
1.1 Antecedentes…………………………………………………………………………………… 11
1.2 Definición Del Problema………………………………………………………………………. 12
1.3 Justificación……………………………………………………………………………………… 12
1.4 Objetivos………………………………………………………………………………………… 13
1.5 Hipótesis………………………………………………………………………………………….. 13
CAPÍTULO 2 MARCO TEÓRICO O FUNDAMENTOS TEÓRICOS………………………………. 14
2.1 Principios Del Escáner Láser………………………………………………………………….. 14
2.1.1 ¿Qué Es El Escaneado Láser?...................................................................................... 14
2.2 Fundamentos Sobre Los Sistemas De Escaneo Láser…………………………………… 14
2.2.1 Escáneres Basados En Tiempo De Vuelo……………………………………………… 15
2.2.2 Escáneres Basados En Cambio De Fase………………………………………………. 16
2.3 Del Láser Escáner A La Nube De Puntos…………………………………………………… 17
2.4 Uso Del Escáner Láser En Campo……………………………………………………………. 18
2.4.1 Planeación Del Escaneó……………………………………………………………………. 18
2.4.2 Trabajo En Campo…………………………………………………………………………… 18
2.4.2.1 Colocación de las estaciones y targets durante el escaneo…………………….. 18
2.4.3 Post-Procesamiento De Datos……………………………………………………………... 22
2.5 Aplicaciones De Escaneo Laser Terrestre…………………………………………………. 23
2.5.1 Reconstrucción De Accidentes E Inspección De Daños Materiales………………. 23
2.5.2 Ingeniería Inversa…………………………………………………………………………….. 24
2.5.3 Protección De Patrimonios Culturales…………………………………………………… 25
2.5.4 Túneles Y Minas………………………………………………………………………………. 26
2.5.5 Forense…………………………………………………………………………………………. 27
2.6 METIS (Maqueta Electrónica Tridimensional Inteligente)………………………………. 29
2.6.1 Diseño De Tuberías…………………………………………………………………………… 31

7
2.6.2 Modelado De Equipos………………………………………………………………………. 31
2.6.3 Ingeniería Estructural………………………………………………………………………… 32
2.6.4 Modelado De Raceway……………………………………………………………………. 32
2.6.5 Diseño De HVAC……………………………………………………………………………… 33
2.6.6 Gestión Y Comprobación De Interferencias……………………………………………. 34
CAPÍTULO 3 RESULTADOS………………………………………………………………………….. 35
3.1 Planeación Escaneo AKAL Golfo………………………………………………………….. 35
3.2 Escaneo Akal Golfo……………………………………………………………………………. 36
3.3 Post-Proceso Nube De Puntos……………………………………………………………….. 38
3.4 Comparación Nube De Puntos Vs Planos Recibidos……………………………………. 42
3.5 Funcionamiento De Una METIS………………………………………………………………. 46
3.5.1 Sistema Operativo Tipo Servidor…………………………………………………………… 46
3.5.2 Base De Datos………………………………………………………………………………… 47
3.5.3 Software De Diseño…………………………………………………………………………. 47
3.5.4 Software METI’s…………………………………………………………………………….. 48
3.6 Desarrollo Y Ordenamiento De Los Catálogos De Información……………………… 48
3.7 Realización De Modelos Electrónicos Bidimensionales Inteligentes (MEBIS)……….. 52
3.8 Realización De Modelos Electrónicos Tridimensionales Inteligentes (METIS)………. 55
3.9 Reporte De Interferencias……………………………………………………………………. 60
3.10 Generación De Isométricos……………………………………………………………… 63
3.11 Estado Actual del proyecto……………………………………………………………… 67
4 CONCLUSIONES……………………………………………………………………………... 69
5 RECOMENDACIONES…………………………………………………………………………… 71
6 REFERENCIAS BIBLIOGRÁFICAS……………………………………………………………….. 72
8
LISTA DE FIGURAS
Figura 1 Asignación de un eje de referencia inercial fijo en el escáner. 15
Figura 2.-Principio de un escáner láser basado en el tiempo de vuelo. 16
Figura 3.-Principio de un escáner láser basado en cambio de fase. 17
Figura 4 Planeación de colocación de escáner y target. 19
Figura 5.- Diámetro de alcance de una toma del escáner láser terrestre. 19
Figura 6.- Diámetro de alcance dos tomas del escáner láser terrestre. 20
Figura 7. - Targets HDS y Black and White de Leica. 20
Figura 8.- Colocación de targets en la zona de escaneo. 21
Figura 9.-Distribución de escaneos en la nube de puntos. 22
Figura 10.- Selección de puntos en común en dos nubes de puntos. 22
Figura 11.- Digitalización de nube de puntos en accidente automovilístico. 23
Figura 12.- Escáner usado en análisis de daños materiales 23
Figura13.- Sede de Ciateq Aguascalientes digitalizada vs nube de puntos 24
Figura 14.- Digitalización de un barco a partir de la nube de puntos. 24
Figura 15.- Escaneo del Tajín a color 25
Figura 16.- Escáner usado en túnel para analizar daños 26
Figura 17.- Reconstrucción de la escena de un crimen usando un láser
escáner
27
Figura 18.- Aplicaciones de un escáner láser terrestre 28
Figura 19.- Funcionamiento de una Maqueta Electrónica Tridimensional
Inteligente.
30
Figura 20.- Modelado de Tuberías 31
Figura 21.- Modelado de Equipos. 31
Figura 22.- Modelado de Estructuras. 32
Figura 23.- Modelado de bandejas y charolas. 32
Figura 24.- Modelado de sistemas de calefacción y aire acondicionado. 33
Figura 25.- Detección de interferencias 34
Figura 26.- Planeación de escaneo y colocación de targets en plataforma
AKAL-GC
35
9
Figura 27. - Colocación de targets Black and White impresos. 36
Figura 28.- Soporte cámara digital para tripié. 37
Figura 29.- Selección puntos en común entre fotografías y nube de puntos. 38
Figura 30.- Error entre los puntos seleccionados de la nube de puntos y las
fotografías.
38
Figura 31.- Nube de puntos con color 39
Figura 32.- Registro de nubes por selección de puntos en común. 40
Figura 33.- Unión de nube de puntos por colocación. 41
Figura 34.- Reporte de error de unión entre nubes 42
Figura 35.- Plano de localización primer nivel plataforma AKAL-GR 42
Figura 36.- Nube de puntos primer nivel plataforma AKAL-GR 43
Figura 37.- Plano de localización segundo nivel plataforma AKAL-GP 43
Figura 38.- Nube de puntos segundo nivel plataforma AKAL-GP 44
Figura 39.- Nube de puntos final del complejo AKAL-Golfo. 45
Figura 40.- Jerarquía del funcionamiento de la METI. 46
Figura 41.- Geometrías parametrizables de bridas conforme norma ASME B
16.47A
50
Figura 42.- Parametrización de bridas en software Plant4D. 51
Figura 43.- Personalización de parámetros para los componentes en
Plant4D.
52
Figura 44.- Plano DTI proporcionado por PEMEX. 53
Figura 45. Creación de nomenclatura para las tuberías. 53
Figura 46.- Nomenclatura de componentes conforme DTI. 54
Figura 47.- Tabla para llenado de atributos para una válvula check. 54
Figura 48.- MEBI realizada en Plant4D y DTI proporcionado por PEMEX. 55
Figura 49.- Importación de nube de puntos en Plant4D. 56
Figura 50.- Modelado de plataforma en Plant4D con base en nube de
puntos.
57
Figura 51.- Perfiles, plataforma y barandales modelados en Plant4D. 57
Figura 52.- Inserción de componentes encontrados en la base de datos
conforme el número de línea.
58
Figura 53.- Error de unión al no ser compatibles los componentes. 58
10
Figura 54.- Colocación automática de empaques conforme base de datos. 59
Figura 55.- Creación de reglas para la realización del reporte de
interferencias.
60
Figura 56.- Selección de disciplinas para la realización del reporte de
interferencias.
61
Figura 57.- Choque de componentes encontrados en el reporte de
interferencias.
62
Figura 58.- Plantilla utilizada para la creación de planos isométricos. 63
Figura 59.- Personalización de símbolos para creación de planos isométricos. 64
Figura 60.- Modificación de puntos de conexión para creación de planos
isométricos.
64
Figura 61.- Creación de planos isométricos conforme número de línea. 65
Figura 62.- Creación automática de lista de materiales. 65
Figura 63.- Plano Isométrico listo para imprimir. 66
Figura 64.- Estructura civil de nueva plataforma AKAL-G2 67
Figura 65.- Estructura civil de nueva plataforma AKAL-G2 67
Figura 66.- Figura 66.- Tubería de la plataforma AKAL-G2 que pasara por
AKAL-GC,GR y GP.
68
Figura 67.- Figura 66.- Tubería de la plataforma AKAL-G2 que pasara por
AKAL-GC,GR y GP.
68
11
CAPÍTULO 1 INTRODUCCIÓN
1.1 - Antecedentes
El primer escáner láser terrestre apareció en el mercado hace 18 años, con las
compañías RIEGL (Austria) y CYRAX (USA) [1]. En 2001 CYRAX fue comprado por Leica
Geosystems que sigue siendo un líder en software de escaneo láser 3D y desarrollo de
equipos.
El escaneo láser es un gran adelanto de la ciencia, básicamente estamos usando puntos
3D para definir las superficies del mundo real que está escaneando. Ya se trate de un
coche, casa, puente, planta industrial o incluso una persona. El escaneo láser era una
de esas tecnologías que no podía avanzar, hasta que el almacenamiento de energía se
hizo más duradero y compacto y las capacidades de almacenamiento se fueron
incrementando [2].
La nube de puntos se ve atractiva en su software de exploración nativa, sin embargo, a
la entrega a los clientes, muchos lo encontrarían inutilizable, debido a su tamaño. Una
nube de puntos típica puede tener un tamaño de 1 a 300 GB, lo que hace la mayoría
de los programas de CAD inoperable. El poder real del escaneo es cuando se puede
utilizar la nube de puntos y modelar en un sistema de software actual.
El concepto de METI’s y MEBI’s comienza en 1986, cuando Intergraph lanza al mercado
Plant Design System (PDS), desde entonces se ha creado y mejorado software para la
realización de estas [3]. Actualmente los líderes en la creación de Modelos Electrónicos
Inteligentes Tridimensionales y Bidimensionales, son AVEVA, Intergraph, Autodesk y
Plant4D.
El beneficio de ser capaces de juntar ambos componentes es precisamente el objetivo
de las METIS, que permiten obtener una representación gráfica incluyendo propiedades
o atributos correspondientes a elementos capturados con el escaneo laser y deben
complementarse, con: tipo de fluido, densidad, compresibilidad, viscosidad del fluido,
etc.
12
1.2 Definición del problema
Tener a la mano información actualizada sobre una instalación industrial con atributos
técnicos asociados es muy importante para Pemex, por lo que continuamente solicita
servicios especializados para la realización de METI’s.
Ciateq actualmente ofrece servicios en la zona golfo del país para Pemex por lo que
vender los servicios de la realización de METI’s es factible sin embargo Ciateq no las
realiza, de ahí la importancia de tener el equipo necesario y el conocimiento ya que es
un mercado muy lucrativo y puede generar indirectamente más proyectos.
1.3 Justificación
No es una novedad el uso de Modelos Tridimensionales Inteligentes para Pemex, ya que
desde el 2005 ha sido un requisito para los proveedores sobre todo en plataformas
marinas, el que se realice ya sea para el Desmantelamiento y Adecuación de Áreas o el
Desarrollar la Ingeniería para la Instalación de nuevos equipos en la Plataforma Marina
o simplemente para actualizar la información de una plataforma de producción o una
plataforma de enlace.
Pemex tiene distribuidas frente a las costas del Golfo de México 248 plataformas y tan
solo entre 2012 y 2016 se tienen la expectativa de instalar en el Golfo de México: 5
plataformas habitacionales, 12 de perforación, 17 de producción, 22 de recuperación y
6 de servicios [4], un enorme mercado paras las aéreas de CAD de Ciateq y para la
realización de las METI´s y no subcontratar este servicio, si agregamos el uso de la
tecnología láser terrestre se forma una poderosa herramienta permitiendo la generación
de más capital humano, intelectual y monetario, logrando la culminación de los
proyectos en un lapso más corto.
13
1.4 Objetivos
Objetivo general:
Elaborar una Maqueta tridimensional inteligente del complejo AKAL Golfo usando la
tecnología de escaneo laser terrestre.
Objetivos específicos:
1.- Analizar la mejor manera de hacer un escaneo en campo
2.- Describir los pasos para la Integración de nube de puntos.
3.- Comparar diferentes software para la creación de una METIS.
4.- Tomar un curso para la administración y creación de una METIS.
1.5 Hipótesis
Es posible la realización de METIS del complejo AKAL Golfo, usando el escáner P20 y el
software Plant4D reduciendo el tiempo de entrega vs proveedor un 10%
14
CAPÍTULO 2 MARCO TEÓRICO O FUNDAMENTOS TEÓRICOS
2.1 Principios del Escáner Laser
2.1.1 ¿Qué es el escaneado láser?
El escaneo láser 3D es un camino muy eficaz y eficiente para obtener dimensiones
precisas en 3D as-built, describe un método mediante el cual una superficie se muestrea
usando tecnología láser. Se analiza un entorno u objeto real para tomar datos sobre su
forma y, posiblemente, su apariencia (por ejemplo el color). Los datos capturados
pueden ser usados más tarde para realizar reconstrucciones digitales, planos
bidimensionales o modelos tridimensionales útiles en una gran variedad de aplicaciones.
La ventaja del escaneado láser es el hecho de que puede tomar una gran cantidad de
puntos con una alta precisión en un periodo de tiempo relativamente corto. Es como
tomar una fotografía con información de profundidad. Y al igual que en el caso de la
fotografía, los escáneres láser son instrumentos de línea de vista. Por tanto, es necesario
realizar múltiples capturas desde diferentes estaciones para garantizar una cobertura
completa de una estructura. [5]
2.2 FUNDAMENTOS SOBRE LOS SISTEMAS DE ESCANEO LÁSER
Los sistemas de escaneo láser terrestre funcionan con movimientos oscilantes, además,
cuentan con un sistema espejos para desviar el haz del láser desde el instrumento en
ángulos variables [6]. La coordenadas cartesianas en el espacio tridimensional están
definidas por los ángulos de ubicación de los espejos al momento de ser emitido el haz
del láser, dichos ángulos se muestran en la Figura 1, como se puede observar, una vez
asignado un eje de referencia inercial fijo en el equipo con origen, O, dentro de la
cabeza del escáner; los ángulos resultantes son los grados de libertad del sistema y
representan la ubicación del punto de interés, P. Figura (1).
15
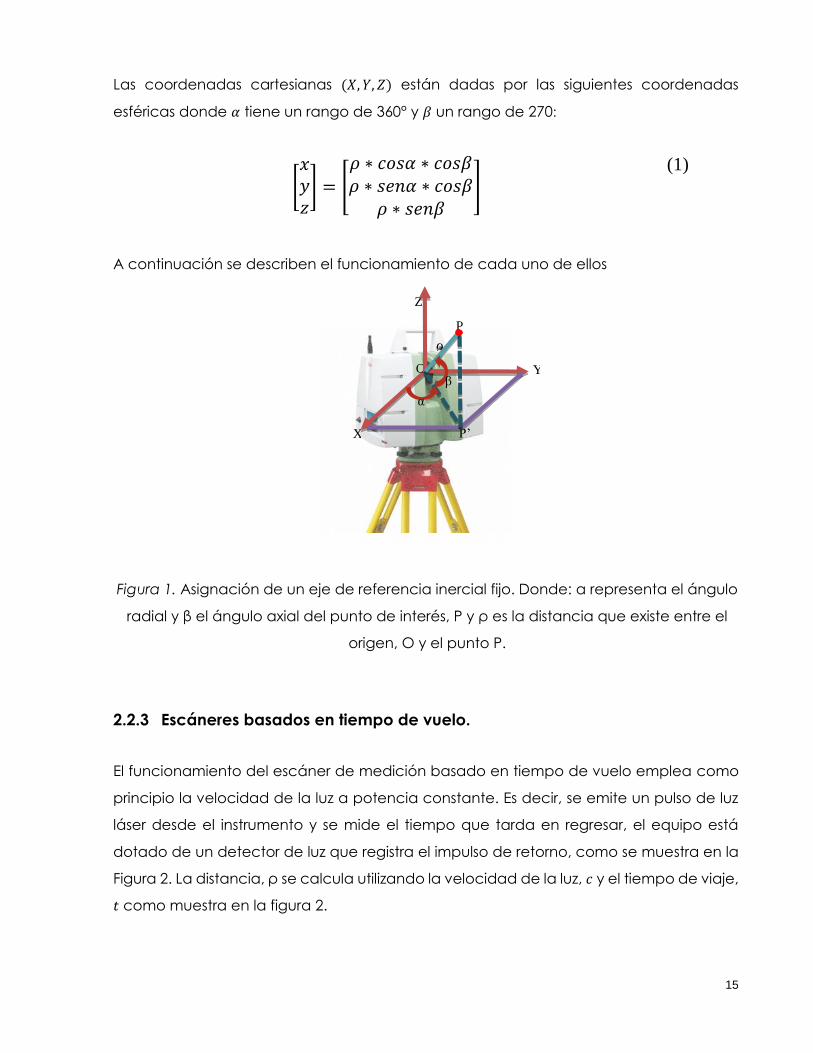
Las coordenadas cartesianas (𝑋, 𝑌, 𝑍) están dadas por las siguientes coordenadas
esféricas donde 𝛼 tiene un rango de 360° y 𝛽 un rango de 270:
[𝑥𝑦𝑧
] = [
𝜌 ∗ 𝑐𝑜𝑠𝛼 ∗ 𝑐𝑜𝑠𝛽𝜌 ∗ 𝑠𝑒𝑛𝛼 ∗ 𝑐𝑜𝑠𝛽
𝜌 ∗ 𝑠𝑒𝑛𝛽]
(1)
A continuación se describen el funcionamiento de cada uno de ellos
Figura 1. Asignación de un eje de referencia inercial fijo. Donde: α representa el ángulo
radial y β el ángulo axial del punto de interés, P y ρ es la distancia que existe entre el
origen, O y el punto P.
2.2.3 Escáneres basados en tiempo de vuelo.
El funcionamiento del escáner de medición basado en tiempo de vuelo emplea como
principio la velocidad de la luz a potencia constante. Es decir, se emite un pulso de luz
láser desde el instrumento y se mide el tiempo que tarda en regresar, el equipo está
dotado de un detector de luz que registra el impulso de retorno, como se muestra en la
Figura 2. La distancia, ρ se calcula utilizando la velocidad de la luz, 𝑐 y el tiempo de viaje,
𝑡 como muestra en la figura 2.
Z
Y
P
P’
O
X
ᵨ
β
α

16
𝜌 =1
2𝑐 ∗ 𝑡
(2)
Figura 2.-Principio de un escáner láser basado en el tiempo de vuelo.
La velocidad de la luz en el vacío es 299, 792,458 kilómetros/segundos. Si la luz viaja por
el aire, se debe aplicar un factor de corrección igual al índice de refracción (en función
de la densidad del aire). La velocidad de la luz en el aire tiene un retraso de 3,108 km/s
aproximadamente, por lo que tarda 3.33 nanosegundos en recorrer un metro. Por tanto,
para alcanzar una precisión de 1 milímetro, se necesita medir intervalos de tiempo de
alrededor de 3.33 picosegundos [7]. Los escáneres por tiempo de vuelo no suelen usar
un haz continuo en el tiempo, sino pulsos de láser. Un láser escáner típico basado en el
tiempo de vuelo puede capturar de 2,000 a 50,000 puntos por segundo.
2.2.4 Escáneres basados en cambio de fase
Los escáneres basados en cambio de fase típica emplean un modulador, cuya señal
moduladora es básicamente una señal periódica, esto permite que el equipo cuente
con un espectro amplio en la potencia del láser lo cual lo hace diferente al método de
tiempo de vuelo [8] . En el caso de una señal sinusoidal como moduladora, ésta es
reflejada al chocar con el objeto físico, lo cual permite encontrar el ángulo de
desfasamiento, 𝜑 como se muestra en la Figura 3.

17
Figura 3.-Principio de un escáner láser basado en cambio de fase.
La relación entre el desfasamiento, 𝜑 la frecuencia modulada, 𝑓𝑚 , el tiempo de regreso,
𝑡 , está dada por la ecuación (3).
𝑡 =𝜑
2𝜋 ∗ 𝑓𝑚 (3)
Dado que el escáner láser emplea un haz de luz, es posible calcular la distancia
empleando (2) y (3), la distancia al objeto se calcula por:
𝜌 =1
2𝑐 ∗ 𝑡 =
𝑐
4𝜋∗
𝜑
𝑓𝑚
(4)
Un láser escáner típico basado en cambio de fase puede capturar de 50,000 a
1, 000,000 puntos por segundo.
2.3 Del láser escáner a la nube de puntos
Las nubes de puntos son sin duda el producto más genuino del láser escáner. En su
definición más simple no son otra cosa que conjuntos de puntos en un sistema de
coordenadas tridimensional [9].Como más adelante apuntaremos, un modelo de nube
de puntos no es sino una copia virtual del edificio, compuesto por puntos cuya captura
ha sido realizada de forma altamente automatizada. Como es natural, la exactitud y la
calidad de esa copia está limitada por los errores inherentes al instrumental de medida
y a los métodos de observación, pero también por la buena o mala distribución de las
tomas.
18
2.4 Uso del escáner láser en campo
La obtención de puntos del entorno escaneado funciona de manera automática, sin
embargo la planeación previa al escaneo y el trabajo en escritorio requiere un
conocimiento detallado para obtener con éxito información útil.
2.4.1 Planeación del escaneo.
Ante la diversidad de aplicaciones que nos ofrece el escaneo laser terrestre, se debe de
saber cuáles son las necesidades del cliente, si un cliente requiere solamente la nube de
puntos para recorridos, que se realicen los Layout de las instalaciones o que se digitalicen
las geometrías tiene un impacto en la cantidad de puntos requeridos y en el equipo
elegido para realizar el trabajo. Recolectar toda la información posible sobre las
instalaciones a escanear ayuda a comprender la dificultad y el tiempo necesario para
llevar a cabo el escaneo. También conocer los alrededores y restricciones del lugar
donde se realizara el escaneo son importantes para saber si habrá obstrucciones al
realizar las tomas o si hay limitantes de tiempo, teniendo toda esta información se
determina si el escaneo laser terrestre que es una técnica altamente desarrollada es la
solución adecuada y el tiempo estimado para la realización del escaneo [10]
2.4.2 Trabajo en campo
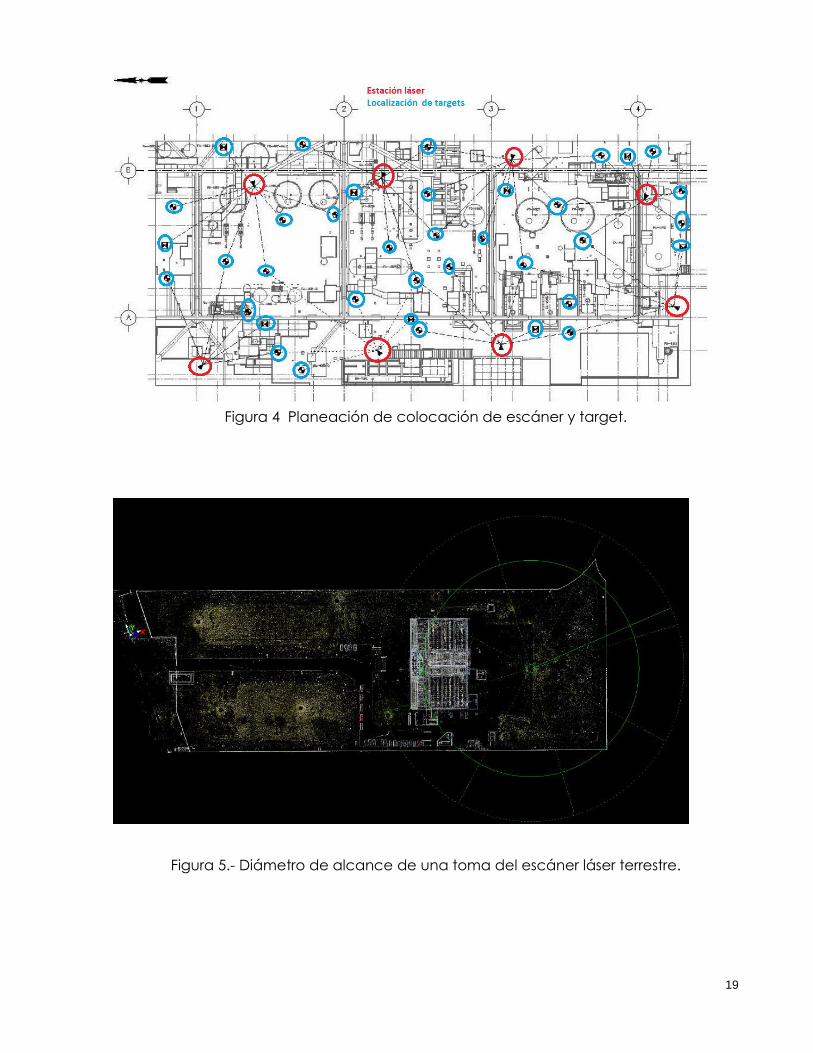
2.4.2.1Colocación de las estaciones y targets durante el escaneo.
Una vez terminada la planificación con la elección del escáner láser se comienza a
determinar cuáles serán las posiciones del escáner láser para cubrir la mayor área
posible sin obstáculos y que al mismo tiempo se reduzca el número de posiciones [11].
[Figuras 4,5 y 6].
19
Figura 4 Planeación de colocación de escáner y target.
Figura 5.- Diámetro de alcance de una toma del escáner láser terrestre.

20
Figura 6.- Diámetro de alcance dos tomas del escáner láser terrestre.
Para minimizar el esfuerzo de unir las estaciones entre si se utilizan targets (Figura 7), que
al darle un número de identificación permite la triangulación y minimiza el error a la hora
unir las tomas entre sí, una de las recomendaciones al usar targets es que tiene que estar
esparcidos lo más ampliamente posible, no en forma lineal, así evitamos que solo se
tenga un grado de libertad [12].
Figura 7. - Targets HDS y Black and White de Leica.

21
Estos targets tienen un patrón de contraste para que puedan ser detectados por el
escáner. Cuando el área a escanear es muy grande lo conveniente es usar targets
impresos en hojas blancas, así se minimiza el esfuerzo de cambiar los targets de posición
cuando se avanza y el costo por usarlos es mucho más bajo. Dependiendo de la técnica
de registro empleada, debe de haber por lo menos 3 targets distribuidos en cada
escaneo como se muestra en la figura 8.
Figura 8.- Colocación de targets en la zona de escaneo.
Durante el escaneo es recomendado tomar notas del levantamiento y marcar las tomas
que ya se realizaron en el croquis de planificación como se muestra en la figura 9, anotar
el número de identificación de los targets, si hubo algún error en alguna toma o cualquier
condición extraña que creemos que pueda afectar el escaneado, todo esto con el fin
de facilitar el trabajo de escritorio [13].

22
Figura 9.-Distribución y nombre de escaneos en la nube de puntos.
2.4.3 Post-procesamiento de datos
Una vez obtenidos los datos se exportan del escáner y se importan a la computadora,
las nubes de puntos se unen de manera automática si cada estación comparte tres
targets en común, si durante el escaneo no se utilizaron targets se unen las nubes a partir
de tres puntos en común que tengan entre sí (Figura 10), en campo la colocación de
targets consume tiempo pero la unión de tomas es más fácil, si nos ahorramos tiempo no
colocando targets en campo, nos toma más tiempo unir las nubes.
Figura 10.- Selección de puntos en común en dos nubes de puntos.
23
2.5 Aplicaciones de Escaneo Laser Terrestre
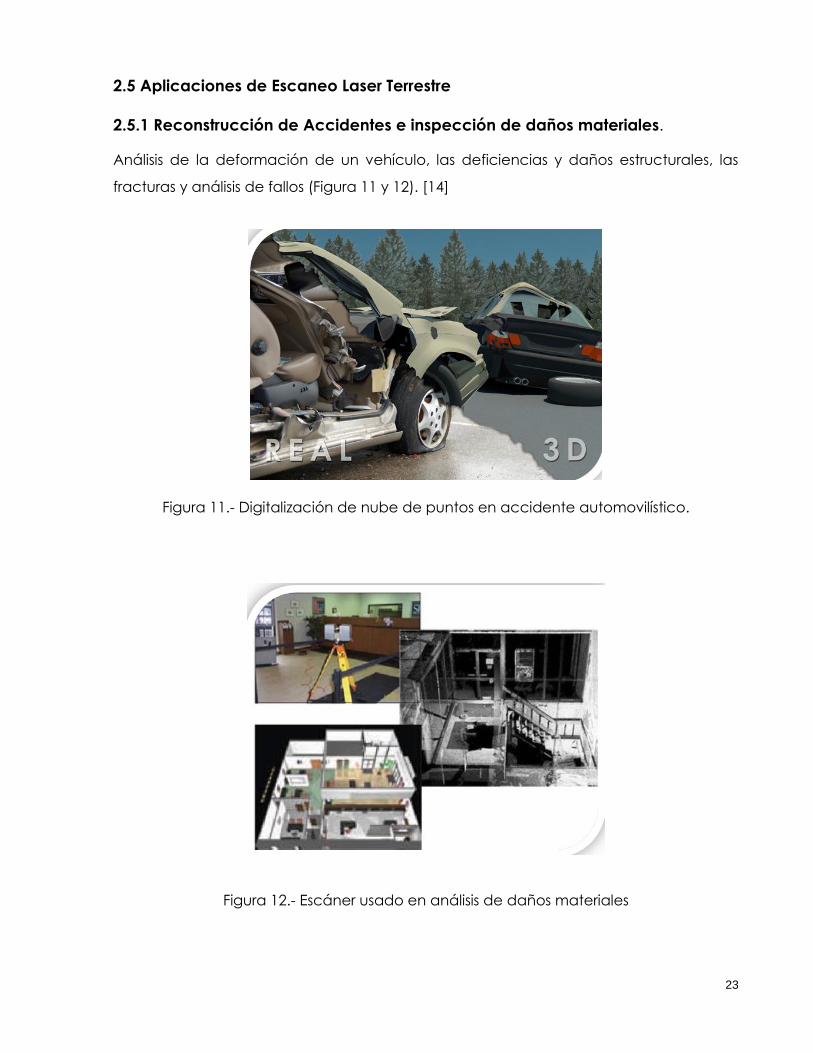
2.5.1 Reconstrucción de Accidentes e inspección de daños materiales.
Análisis de la deformación de un vehículo, las deficiencias y daños estructurales, las
fracturas y análisis de fallos (Figura 11 y 12). [14]
Figura 11.- Digitalización de nube de puntos en accidente automovilístico.
Figura 12.- Escáner usado en análisis de daños materiales

24
2.5.2 Ingeniería inversa
El escaneo laser terrestre nos ofrece digitalizar edificios, tuberías, equipos, etc. y poder
obtener de esa información mediciones para digitalizarlos y obtener una geometría 3D
fiable (Figura 13 y 14).
Se puede utilizar en interiores, en exteriores con cualquier condición de luz, a larga
distancia y con alta precisión [15].
Figura13.- Sede de Ciateq Aguascalientes digitalizada vs nube de puntos
Figura 14.- Digitalización de un barco a partir de la nube de puntos.
25
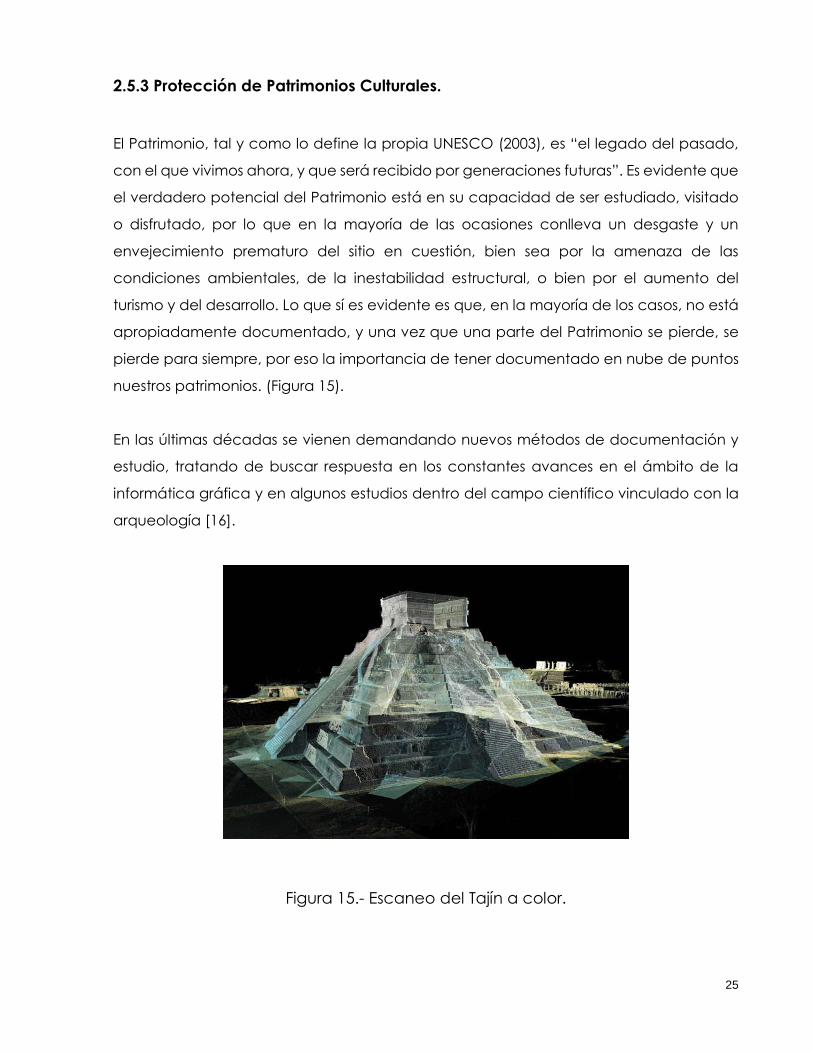
2.5.3 Protección de Patrimonios Culturales.
El Patrimonio, tal y como lo define la propia UNESCO (2003), es “el legado del pasado,
con el que vivimos ahora, y que será recibido por generaciones futuras”. Es evidente que
el verdadero potencial del Patrimonio está en su capacidad de ser estudiado, visitado
o disfrutado, por lo que en la mayoría de las ocasiones conlleva un desgaste y un
envejecimiento prematuro del sitio en cuestión, bien sea por la amenaza de las
condiciones ambientales, de la inestabilidad estructural, o bien por el aumento del
turismo y del desarrollo. Lo que sí es evidente es que, en la mayoría de los casos, no está
apropiadamente documentado, y una vez que una parte del Patrimonio se pierde, se
pierde para siempre, por eso la importancia de tener documentado en nube de puntos
nuestros patrimonios. (Figura 15).
En las últimas décadas se vienen demandando nuevos métodos de documentación y
estudio, tratando de buscar respuesta en los constantes avances en el ámbito de la
informática gráfica y en algunos estudios dentro del campo científico vinculado con la
arqueología [16].
Figura 15.- Escaneo del Tajín a color.

26
2.5.4 Túneles y Minas
La seguridad es una preocupación primordial en cualquier mina, tanto si es mina de oro
o de carbón. Un escáner láser puede identificar y registrar las grietas y fisuras, comparar
estos datos con las exploraciones previas, e identificar las áreas de preocupación. Esta
es una enorme contribución a la seguridad de las minas y un entorno de trabajo seguro.
La documentación permanente en 3D de la mina, puede evitar un colapso de la mina,
ya que detecta al instante cualquier alteración en estratos de roca locales, por lo que
las medidas de seguridad adecuadas puede ser tomadas con mucha antelación. Los
trabajos de construcción subterránea, tales como la excavación de una mina de carbón
nueva, se hacen también más fácil y seguros mediante el uso del Laser Scanner. (Figura
16).
En minas a cielo abierto, donde se encuentran ciertos tipos de carbón y minerales, el
pozo también se necesita una cuidadosa inspección. El Laser Scanner también puede
identificar determinadas cantidades de roca y las materias primas, que lo convierten en
una valiosa pieza de equipo de minería moderna [5]
Figura 16.- Escáner usado en túnel para analizar daños
27
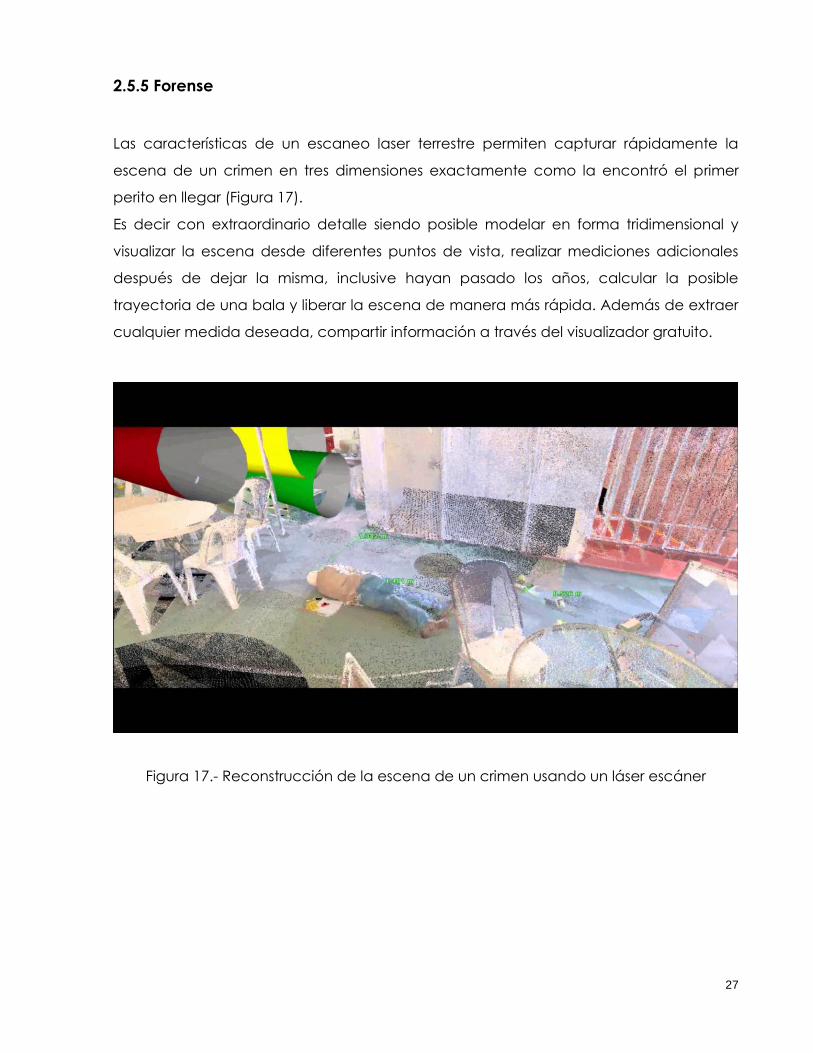
2.5.5 Forense
Las características de un escaneo laser terrestre permiten capturar rápidamente la
escena de un crimen en tres dimensiones exactamente como la encontró el primer
perito en llegar (Figura 17).
Es decir con extraordinario detalle siendo posible modelar en forma tridimensional y
visualizar la escena desde diferentes puntos de vista, realizar mediciones adicionales
después de dejar la misma, inclusive hayan pasado los años, calcular la posible
trayectoria de una bala y liberar la escena de manera más rápida. Además de extraer
cualquier medida deseada, compartir información a través del visualizador gratuito.
Figura 17.- Reconstrucción de la escena de un crimen usando un láser escáner
28
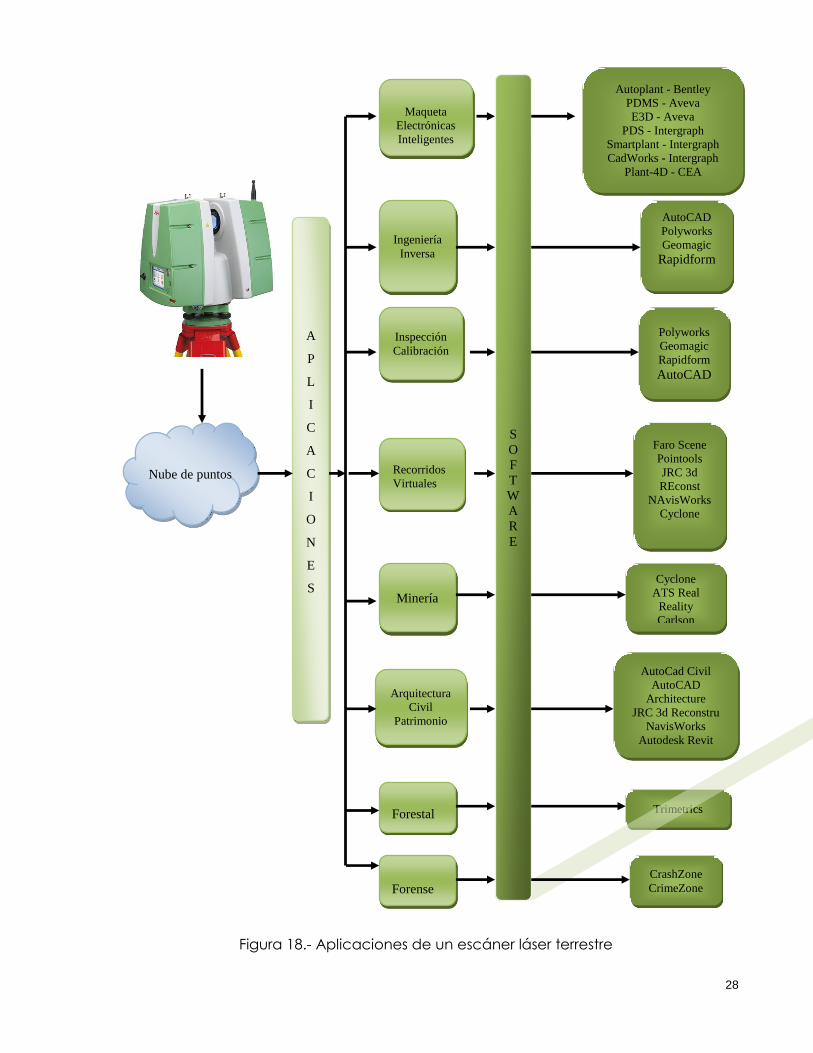
Figura 18.- Aplicaciones de un escáner láser terrestre
Nube de puntos
A
P
L
I
C
A
C
I
O
N
E
S
Maqueta
Electrónicas
Inteligentes
Ingeniería
Inversa
Inspección
Calibración
Recorridos
Virtuales
Minería
Arquitectura
Civil
Patrimonio
Forestal
Forense
Autoplant - Bentley
PDMS - Aveva
E3D - Aveva
PDS - Intergraph
Smartplant - Intergraph
CadWorks - Intergraph
Plant-4D - CEA
AutoCAD
Polyworks
Geomagic
Rapidform
Polyworks
Geomagic
Rapidform
AutoCAD
Faro Scene
Pointools
JRC 3d
REconst
NAvisWorks
Cyclone
Cyclone
ATS Real
Reality
Carlson
AutoCad Civil
AutoCAD
Architecture
JRC 3d Reconstru
NavisWorks
Autodesk Revit
Trimetrics
CrashZone
CrimeZone
S
O
F
T
W
A
R
E

29
2.6 METI (Maqueta Electrónica Tridimensional Inteligente)
El objetivo de una maqueta electrónica tridimensional inteligente es tener una base de
datos con todas las características técnicas y geometrías de una instalación para así
poder contar con planos e isométricos de la misma.
Derivado a que el desarrollo de un proyecto de ingeniería mediante la utilización de
METI's cuenta con una base de datos centralizada conformada una sola vez, nos permite
integrar catálogos de especificaciones, normas, documentos técnicos, entre otros, que
pueden ser utilizados por todas las disciplinas que intervienen de manera concurrente,
implicando que toda la información desarrollada y generada se encuentre
homologada.
Esta etapa se caracteriza por una Ingeniería concurrente debido a la participación de
diferentes disciplinas, permitiendo la expansión rápida de un conjunto de información. El
proyecto es distribuido entre varias disciplinas con una interface común de operación,
permitiendo la administración del cambio y desarrollo de ingeniería en diferentes etapas
del diseño, lo anterior nos permite realizar trabajos de manera progresiva en forma
paralela, evitando la inconsistencia de datos, que es un alcance inevitable cuando se
tienen un proceso de diseño en paralelo, gracias a un flujo de trabajo controlado las
METI’s nos permiten administrar la ingeniería concurrente (Figura 19).
Con las METI’s, se genera toda la información en 3d, y los planos de dibujos ortográficos
o isométricos podrían ser generados automáticamente a partir de la base de datos. El
modelo podría ser revisado para interferencias en fase de diseño, reduciendo problemas
durante la construcción, y la lista de materiales se generan al principio del proyecto para
comenzar con las actividades de compra. Los mayores proveedores de software para
la realización de METI’s y MEBI’s son Aveva (2005) con PDMS (PlantDesign Management
System) e Intergraph con PDS (PlantDesignSystem) y 3D-Smartplant. Ambos PDS y PDMS
han existido desde mediados de los años ochenta.

30
Figura 19.- Funcionamiento de una Maqueta Electrónica Tridimensional Inteligente.
SE PUEDE
DETECTAR
INFERFERENCIA
S O
INCONGRUENCI
AS ENTRE LOS
ELEMENTOS
QUE SE VAN
MODELANDO
OBTENCIÓN DE
VOLUMETRIA DE
CADA UNA DE
LAS
ESPECIALIDADES
QUE
CONFORMAN LA
INSTALACIÓN
OBTENCIÓN DE
PLANOS EN 2D
(ISOMETRICOS,
ELEVACIONES Y
VISTAS EN
PLANTA)
VISUALIZACIÓN
, CAMINATAS,
VIDEOS Y
FOTOGRAFIAS
DEL MODELO
GRAFICO
DETECCIÓN DE
INTERFERENCIAS
CUANTIFICACIÓN
DE MATERIALES DRAF
(EXTRACCIÓN
PLANOS DWG)
VISUALIZACIÓN
MAQUETAS
ELECTRONICAS
TRIDIMENSIONALS
INTELIGENTES
BASE DE DATOS
CON LA INFORMACIÓN
DE TODOS Y CADA UNOS
DE LOS ELEMENTOS QUE
SE VAN A UTILIZAR.
HVAC (AIRE
ACONDICIONADO)
TUBERIAS (LINEAS DE
PROCESO,
SERVICIO Y
ELECTRICO)
ESTRUCTURAS EQUIPOS (MECANICOS,
ESTATICOS Y
DINAMICOS)
ELECTRICO

31
2.6.1 Diseño de Tuberías
Estas nos entregan especificaciones de diseño, datos completos de referencias además
de especificaciones de cualquier tubería, también se tiene acceso a bibliotecas
paramétricas, se pueden generar tablas de dimensión y material. Se pueden generar
planos directamente a partir del 3D (Figura 20).
Figura 20.- Modelado de Tuberías
2.6.2 Modelado de equipos
Se pueden modelar fácilmente, posicionar y modificar equipos, que pueden ir desde
formas primitivas y paramétricas (Figura 11). Se controla y se obtiene un posicionamiento
preciso de la boquilla, además se puede observar la interferencia para el mantenimiento
de los mismos. Se conectan a las tuberías fácilmente adoptando las características de
estas, tales como especificaciones, tamaño, clasificación y orientación.
Figura 21.- Modelado de Equipos.
32
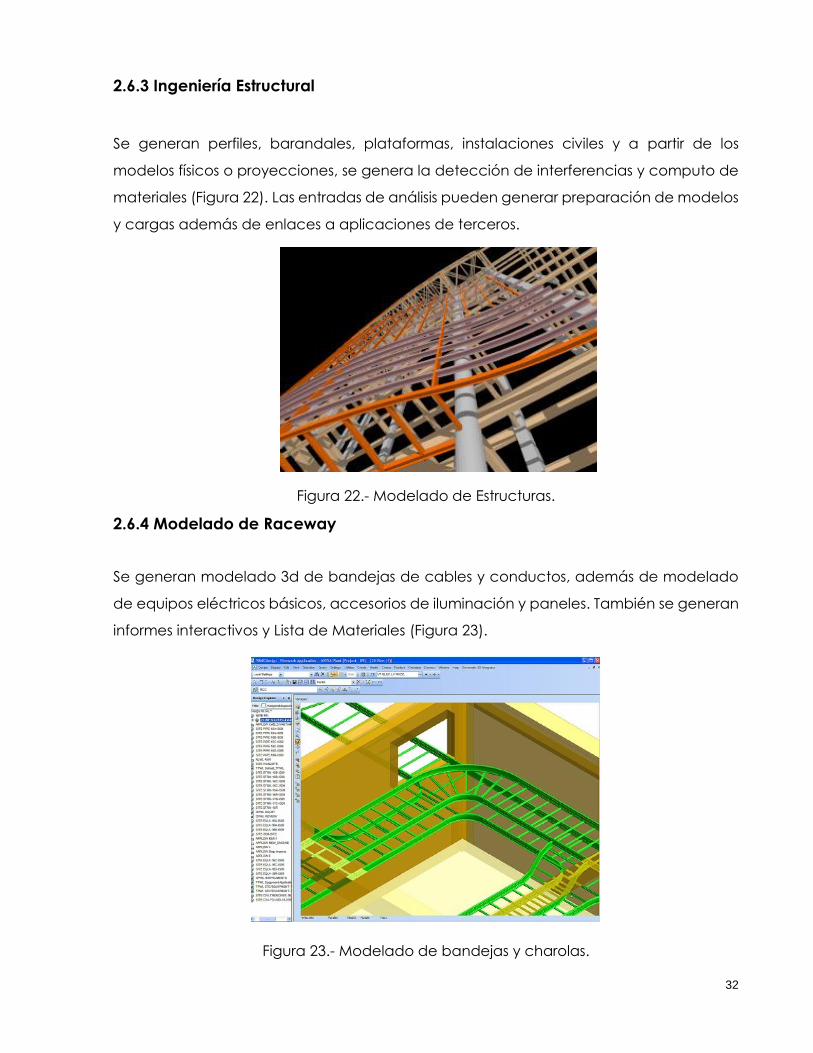
2.6.3 Ingeniería Estructural
Se generan perfiles, barandales, plataformas, instalaciones civiles y a partir de los
modelos físicos o proyecciones, se genera la detección de interferencias y computo de
materiales (Figura 22). Las entradas de análisis pueden generar preparación de modelos
y cargas además de enlaces a aplicaciones de terceros.
Figura 22.- Modelado de Estructuras.
2.6.4 Modelado de Raceway
Se generan modelado 3d de bandejas de cables y conductos, además de modelado
de equipos eléctricos básicos, accesorios de iluminación y paneles. También se generan
informes interactivos y Lista de Materiales (Figura 23).
Figura 23.- Modelado de bandejas y charolas.
33
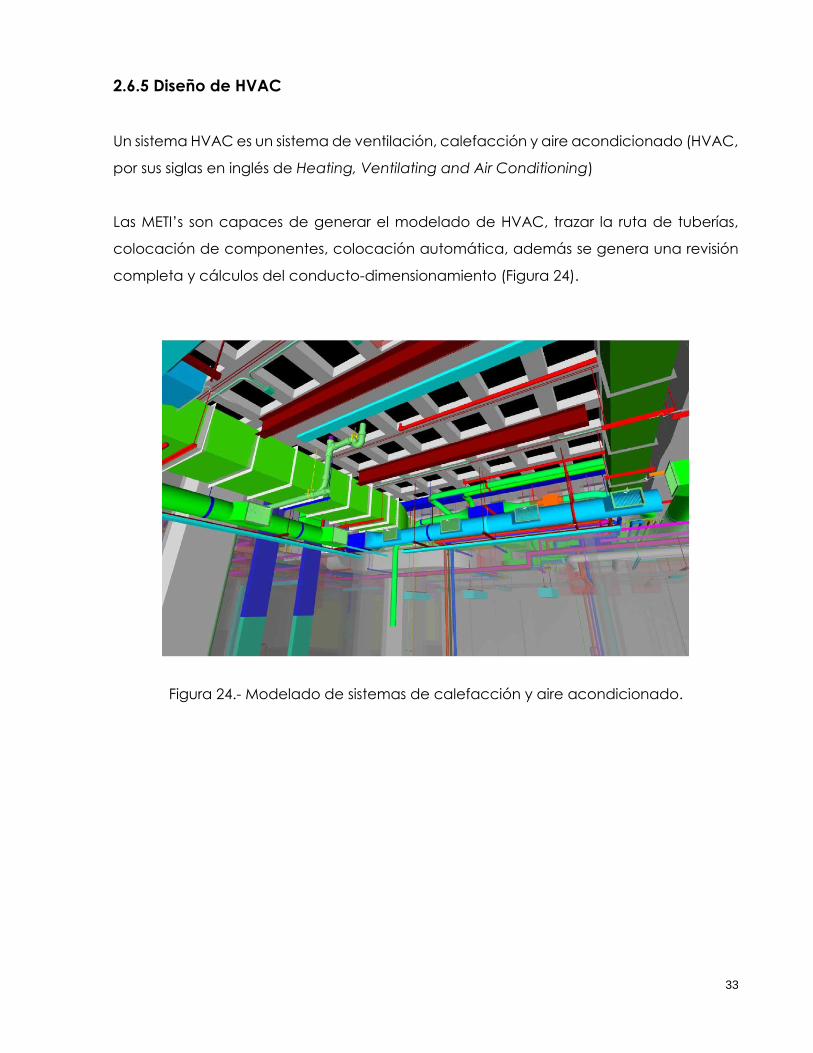
2.6.5 Diseño de HVAC
Un sistema HVAC es un sistema de ventilación, calefacción y aire acondicionado (HVAC,
por sus siglas en inglés de Heating, Ventilating and Air Conditioning)
Las METI’s son capaces de generar el modelado de HVAC, trazar la ruta de tuberías,
colocación de componentes, colocación automática, además se genera una revisión
completa y cálculos del conducto-dimensionamiento (Figura 24).
Figura 24.- Modelado de sistemas de calefacción y aire acondicionado.
34
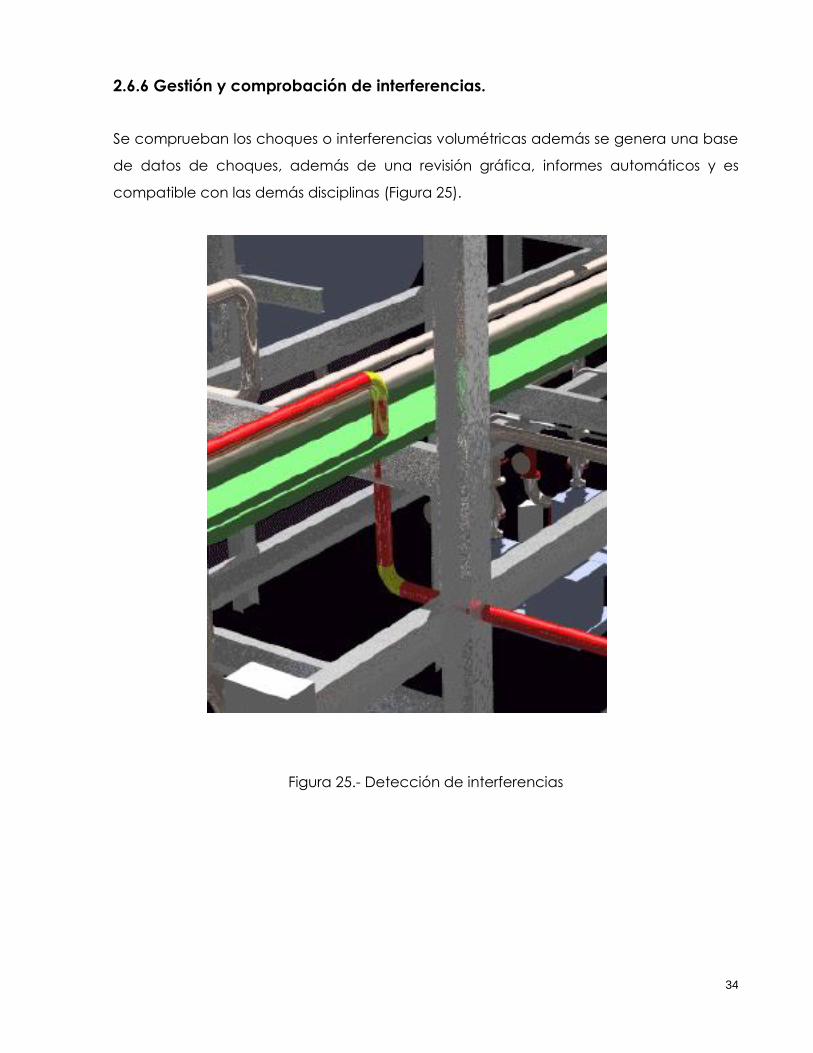
2.6.6 Gestión y comprobación de interferencias.
Se comprueban los choques o interferencias volumétricas además se genera una base
de datos de choques, además de una revisión gráfica, informes automáticos y es
compatible con las demás disciplinas (Figura 25).
Figura 25.- Detección de interferencias
35
CAPÍTULO 3 RESULTADOS
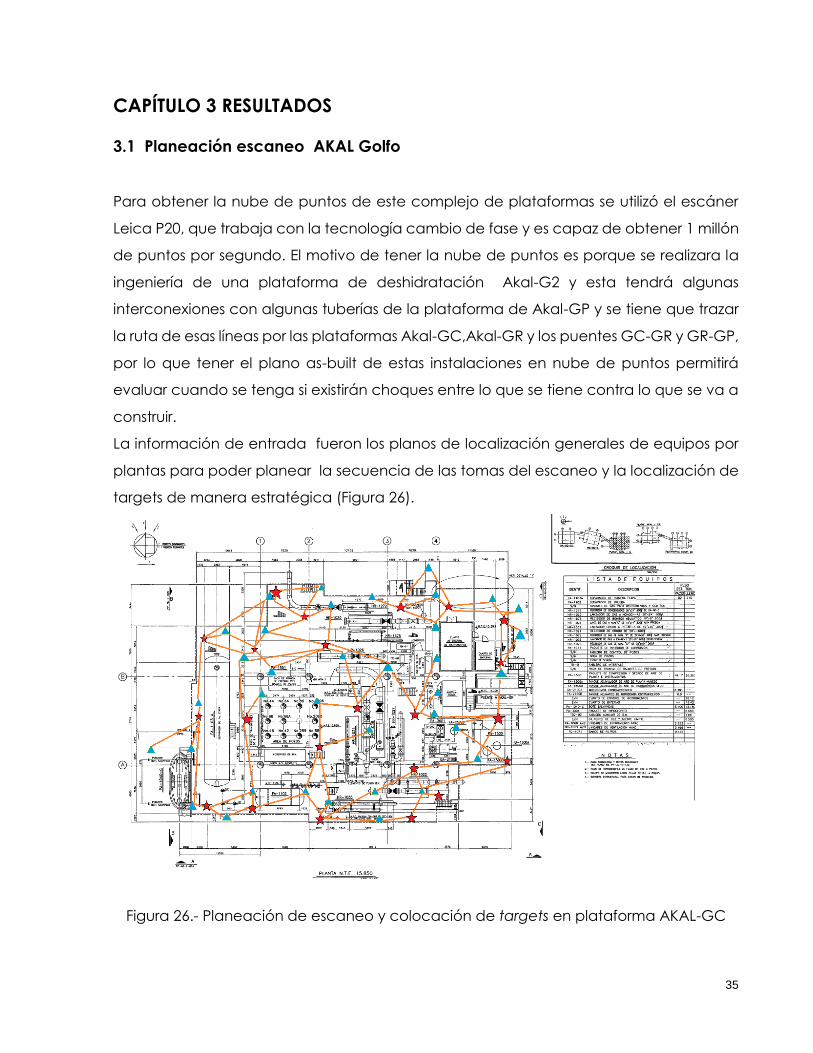
3.1 Planeación escaneo AKAL Golfo
Para obtener la nube de puntos de este complejo de plataformas se utilizó el escáner
Leica P20, que trabaja con la tecnología cambio de fase y es capaz de obtener 1 millón
de puntos por segundo. El motivo de tener la nube de puntos es porque se realizara la
ingeniería de una plataforma de deshidratación Akal-G2 y esta tendrá algunas
interconexiones con algunas tuberías de la plataforma de Akal-GP y se tiene que trazar
la ruta de esas líneas por las plataformas Akal-GC,Akal-GR y los puentes GC-GR y GR-GP,
por lo que tener el plano as-built de estas instalaciones en nube de puntos permitirá
evaluar cuando se tenga si existirán choques entre lo que se tiene contra lo que se va a
construir.
La información de entrada fueron los planos de localización generales de equipos por
plantas para poder planear la secuencia de las tomas del escaneo y la localización de
targets de manera estratégica (Figura 26).
Figura 26.- Planeación de escaneo y colocación de targets en plataforma AKAL-GC
36
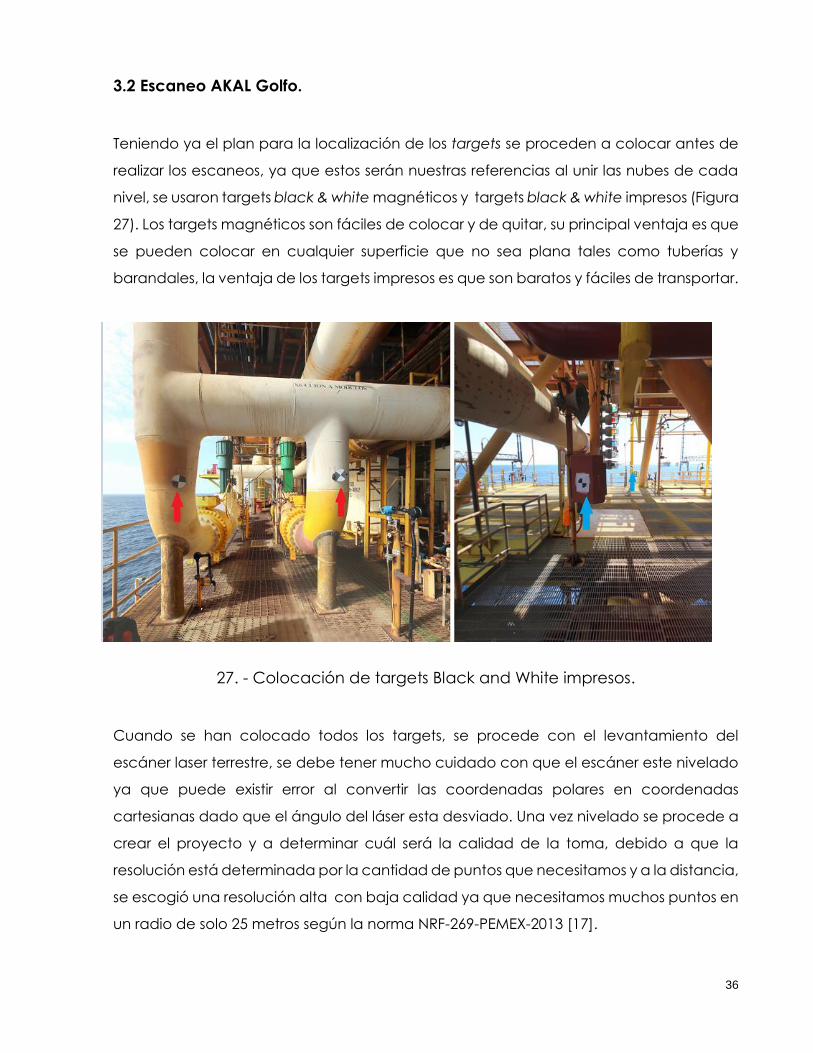
3.2 Escaneo AKAL Golfo.
Teniendo ya el plan para la localización de los targets se proceden a colocar antes de
realizar los escaneos, ya que estos serán nuestras referencias al unir las nubes de cada
nivel, se usaron targets black & white magnéticos y targets black & white impresos (Figura
27). Los targets magnéticos son fáciles de colocar y de quitar, su principal ventaja es que
se pueden colocar en cualquier superficie que no sea plana tales como tuberías y
barandales, la ventaja de los targets impresos es que son baratos y fáciles de transportar.
27. - Colocación de targets Black and White impresos.
Cuando se han colocado todos los targets, se procede con el levantamiento del
escáner laser terrestre, se debe tener mucho cuidado con que el escáner este nivelado
ya que puede existir error al convertir las coordenadas polares en coordenadas
cartesianas dado que el ángulo del láser esta desviado. Una vez nivelado se procede a
crear el proyecto y a determinar cuál será la calidad de la toma, debido a que la
resolución está determinada por la cantidad de puntos que necesitamos y a la distancia,
se escogió una resolución alta con baja calidad ya que necesitamos muchos puntos en
un radio de solo 25 metros según la norma NRF-269-PEMEX-2013 [17].

37
Cuando se determina la calidad y resolución del escaneo, simplemente se tiene que dar
un click de SCAN en la pantalla del equipo cada vez que coloquemos el escáner en
diferentes lugares. Cuando se acaba de realizar una toma con el escáner y para poder
agregar color a la nube de puntos, se retira el equipo y se coloca en el tripié un soporte
especial para cámara fotográfica con lente de pescado para realizar tomas cada 30
grados radialmente y axialmente para formar una imagen esférica del punto donde se
colocó el escáner (Figura 28).
Figura 28.- Soporte cámara digital para tripié.

38
3.3 Post-proceso nube de puntos
Cuando se han realizado todas las tomas necesarias con el escáner y con la cámara
fotográfica se importan los archivos nativos en el software de Cyclone para poder
visualizar cada estación y agregar color a las nubes. Se utilizan los programas de PANO
y PTGUI para crear una imagen de 360° y después convertirla en imágenes cubicas. El
programa importa las imágenes y nos pide que se seleccionen tres puntos en común
entre las fotos y la nube de puntos para sincronizarlos (Figura 29 y 30), cuando asigna a
cada punto su color nos muestra un cuadro con la diferencia que hubo entre la foto y la
nube.
Figura 29.- Selección puntos en común entre fotografías y nube de puntos.
Figura 30.- Error entre los puntos seleccionados de la nube de puntos y las fotografías.
39
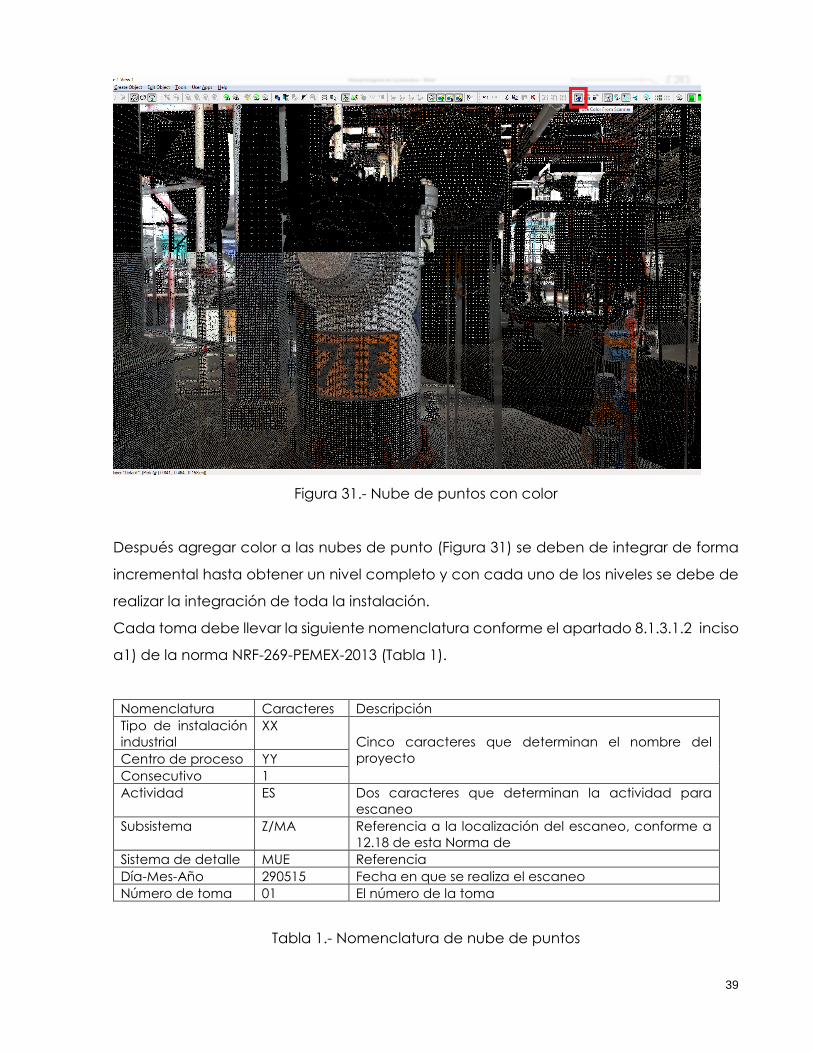
Figura 31.- Nube de puntos con color
Después agregar color a las nubes de punto (Figura 31) se deben de integrar de forma
incremental hasta obtener un nivel completo y con cada uno de los niveles se debe de
realizar la integración de toda la instalación.
Cada toma debe llevar la siguiente nomenclatura conforme el apartado 8.1.3.1.2 inciso
a1) de la norma NRF-269-PEMEX-2013 (Tabla 1).
Nomenclatura Caracteres Descripción
Tipo de instalación
industrial
XX
Cinco caracteres que determinan el nombre del
proyecto Centro de proceso YY
Consecutivo 1
Actividad ES Dos caracteres que determinan la actividad para
escaneo
Subsistema Z/MA Referencia a la localización del escaneo, conforme a
12.18 de esta Norma de
Sistema de detalle MUE Referencia
Día-Mes-Año 290515 Fecha en que se realiza el escaneo
Número de toma 01 El número de la toma
Tabla 1.- Nomenclatura de nube de puntos

40
Como se usaron targets el software realiza una detección de estos en todas las tomas y
de acuerdo a su posición forma patrones, como entre tomas continuas comparten por
lo menos tres targets estos patrones se empalman fusionando así las nubes.
Cuando algunas estaciones no se pueden relacionar debido a que el software no
detecta algunos targets, se utiliza la técnica ICP (Iterative Closest Point) donde se tiene
que seleccionar tres puntos en común entre las dos nubes después el software
comprueba por medio de iteraciones las distancias entre los puntos de las dos nubes
para alinearlas minimizando el error de empalme (Figura 32).
Figura 32.- Registro de nubes por selección de puntos en común.
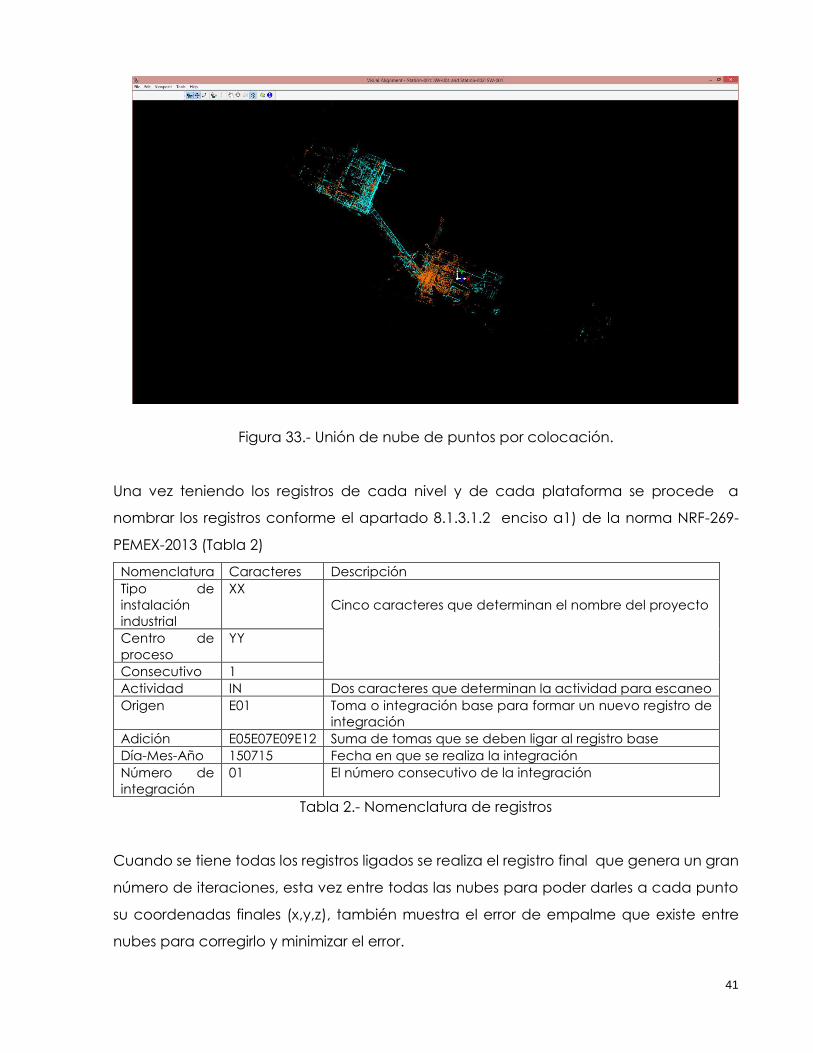
Una técnica más reciente y fácil de usar consiste en alinear las nubes de puntos desde
una vista top y una vista lateral, al hacer esto el software también por medio de
iteraciones comprueba la distancia entre todos los puntos de la nube y las acomoda de
manera que se minimice el error (Figura 33).
41
Figura 33.- Unión de nube de puntos por colocación.
Una vez teniendo los registros de cada nivel y de cada plataforma se procede a
nombrar los registros conforme el apartado 8.1.3.1.2 enciso a1) de la norma NRF-269-
PEMEX-2013 (Tabla 2)
Tabla 2.- Nomenclatura de registros
Cuando se tiene todas los registros ligados se realiza el registro final que genera un gran
número de iteraciones, esta vez entre todas las nubes para poder darles a cada punto
su coordenadas finales (x,y,z), también muestra el error de empalme que existe entre
nubes para corregirlo y minimizar el error.
Nomenclatura Caracteres Descripción
Tipo de
instalación
industrial
XX
Cinco caracteres que determinan el nombre del proyecto
Centro de
proceso
YY
Consecutivo 1
Actividad IN Dos caracteres que determinan la actividad para escaneo
Origen E01 Toma o integración base para formar un nuevo registro de
integración
Adición E05E07E09E12 Suma de tomas que se deben ligar al registro base
Día-Mes-Año 150715 Fecha en que se realiza la integración
Número de
integración
01 El número consecutivo de la integración
42
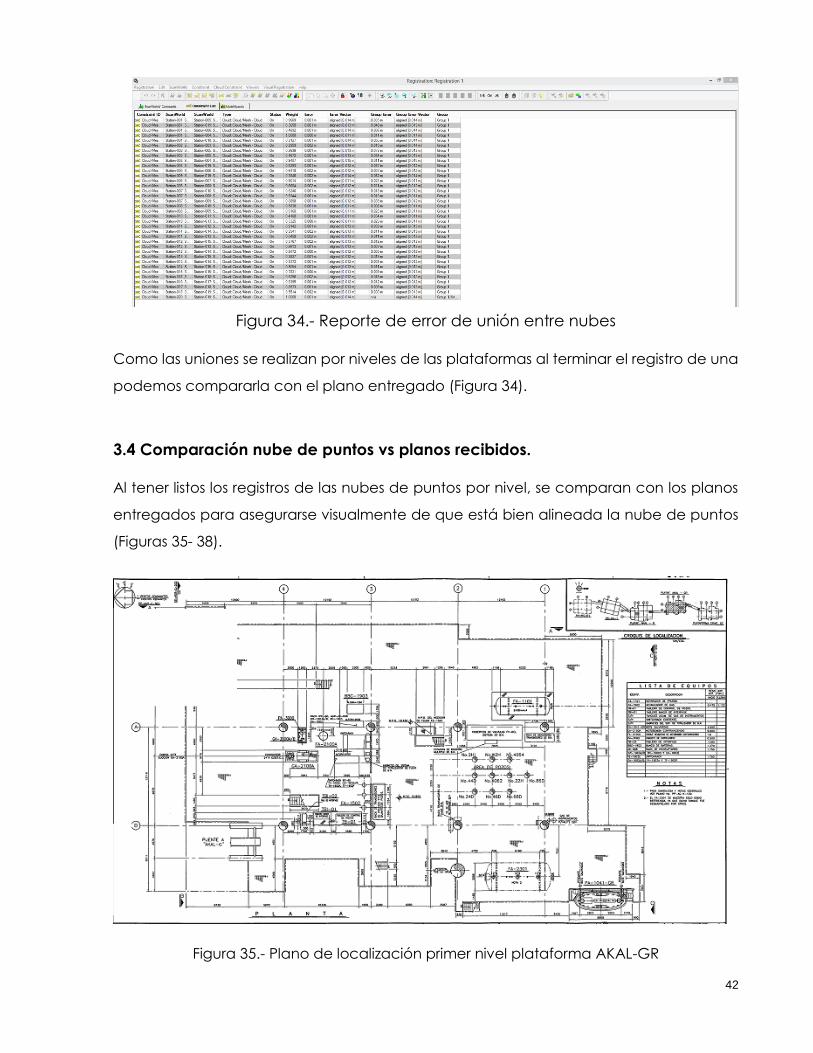
Figura 34.- Reporte de error de unión entre nubes
Como las uniones se realizan por niveles de las plataformas al terminar el registro de una
podemos compararla con el plano entregado (Figura 34).
3.4 Comparación nube de puntos vs planos recibidos.
Al tener listos los registros de las nubes de puntos por nivel, se comparan con los planos
entregados para asegurarse visualmente de que está bien alineada la nube de puntos
(Figuras 35- 38).
Figura 35.- Plano de localización primer nivel plataforma AKAL-GR

43
Figura 36.- Nube de puntos primer nivel plataforma AKAL-GR
Figura 37.- Plano de localización segundo nivel plataforma AKAL-GP
44
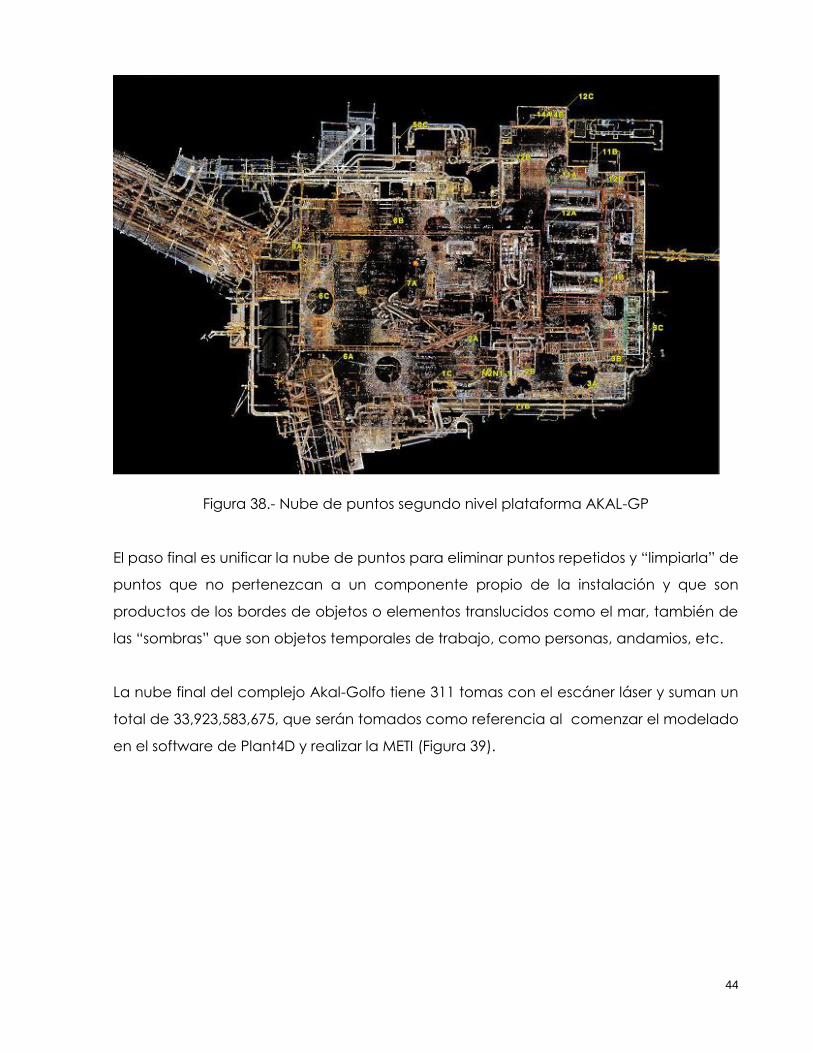
Figura 38.- Nube de puntos segundo nivel plataforma AKAL-GP
El paso final es unificar la nube de puntos para eliminar puntos repetidos y “limpiarla” de
puntos que no pertenezcan a un componente propio de la instalación y que son
productos de los bordes de objetos o elementos translucidos como el mar, también de
las “sombras” que son objetos temporales de trabajo, como personas, andamios, etc.
La nube final del complejo Akal-Golfo tiene 311 tomas con el escáner láser y suman un
total de 33,923,583,675, que serán tomados como referencia al comenzar el modelado
en el software de Plant4D y realizar la METI (Figura 39).

45
Fig
ura
39
.- Nu
be
de
pu
nto
s fina
l de
l co
mp
lejo
AK
AL-G
olfo
.

46
3.5 Funcionamiento de una METI
Para poder tener acceso a las librerías, interoperabilidad entre máquinas, software de diseño y
de atributos, los programas que realizan METI’s usan la siguiente jerarquía (Figura 40).
Figura 40.- Jerarquía del funcionamiento de la METI’s.
3.5.1 Sistema Operativo tipo Servidor
El término cliente/servidor describe un sistema en el que una máquina cliente solicita a una
segunda máquina llamada servidor que ejecute una tarea específica. El cliente suele ser una
computadora conectada a una LAN, y el servidor es, por lo general, una máquina anfitriona,
como un servidor de archivos PC. El programa cliente cumple dos funciones distintas: por un lado
gestiona la comunicación con el servidor, solicita un servicio y recibe los datos enviados por aquél.
Por otro, maneja la interfaz con el usuario: presenta los datos en el formato adecuado y brinda
las herramientas y comandos necesarios para que el usuario pueda utilizar las prestaciones del
servidor de forma sencilla. El programa servidor en cambio, básicamente sólo tiene que
encargarse de transmitir la información de forma eficiente. No tiene que atender al usuario. De
esta forma un mismo servidor puede atender a varios clientes al mismo tiempo.
Los Sistemas Operativos tipo servidor que existen en el mercado son: Netware, Windows NT
Server, Vines, Unix.
Sistema Operativo Servidor
Base de datos
Software de diseño
Software Metis
47
3.5.2 Base de Datos
Una base de datos (cuya abreviatura es BD) es una entidad en la cual se pueden
almacenar datos de manera estructurada, con la menor redundancia posible diferentes
programas y diferentes usuarios deben poder utilizar estos datos. Por lo tanto, el
concepto de base de datos generalmente está relacionado con el de red ya que se
debe poder compartir esta información. De allí el término base. "Sistema de información"
es el término general utilizado para la estructura global que incluye todos los mecanismos
para compartir datos que se han instalado. Toda base de datos debe tener una serie de
características tales como seguridad (sólo personas autorizadas podrán acceder a la
información), integridad (la información se mantendrá sin pérdidas de datos), e
independencia (esta característica es fundamental ya que una buena base de datos
debería ser independiente del sistema operativo o programas que interactúen con ella).
Hay más características que debe reunir una base de datos como ser consistente (es
decir, que la información se guarde sin duplicidades y de manera correcta). Y
finalmente, las bases de datos actuales permiten el manejo correcto de transacciones.
Esto significa que se ha de permitir efectuar varias operaciones sobre la base de datos
pero tratadas a modo de una sola. Es decir, si en el conjunto de las operaciones de una
transacción se produce un error, entonces se deshacen todas las operaciones realizadas
anteriormente y se cancela la transacción.
Algunas de las Bases de datos que existen en el mercado son: MySQL, dBase, Microsoft
SQL, Oracle, Access.
3.5.3 Software de diseño.
El software de diseño (diseño y dibujo asistido por computadora) permite hacer uso de
las tecnologías informáticas para el diseño y la documentación sobre diseño. El software
de diseño remplaza los dibujos a mano con procesos automatizados. Se utiliza en
sectores de arquitectura, mecánica, electricidad e ingeniería estructural, estos
programas ayudan a explorar ideas de diseño, visualizar conceptos mediante objetos
tridimensionales y así simular el diseño en el mundo real.
Los software de diseño más utilizados son: Solidworks, Catia, Autocad, Microstation,
ProEngineer.
48
3.5.4 Software METIS
El software utilizado para crear las METI’s conecta los atributos que se encuentran en
las librerías de las base de datos, con las geometrías que se realizan en el software de
diseño, de esta manera valida conforme librerías los objetos 3d, dando atributos a las
tuberías, racks eléctricos, soportes, etc.
Los programas para elaborar METI’s más comunes son: Autoplant de Bentley, PDMS y
E3D de AVEVA, PDS, Smartplant y CadWorx de Intergraph, Plant4D de CEA.
Usaremos el sistema operativo Windows Server 2008, con base de datos de Access, el
software de diseño será Autocad y el software de METI’s será Plant4D.
3.6 Desarrollo y ordenamiento de los catálogos de información.
Uno de los principios que usa el software para diseñar conforme a normas, son los datos
que se introducen en sus librerías, es decir que todo lo que se modela esta validado por
los valores que se introducen previamente, para lograr esto la base de datos tiene
interacción con las tablas tanto de modelado como de atributos, de tal manera que
cuando colocamos una tubería, válvula, soporte, etc. la geometría se considera ya
inteligente.
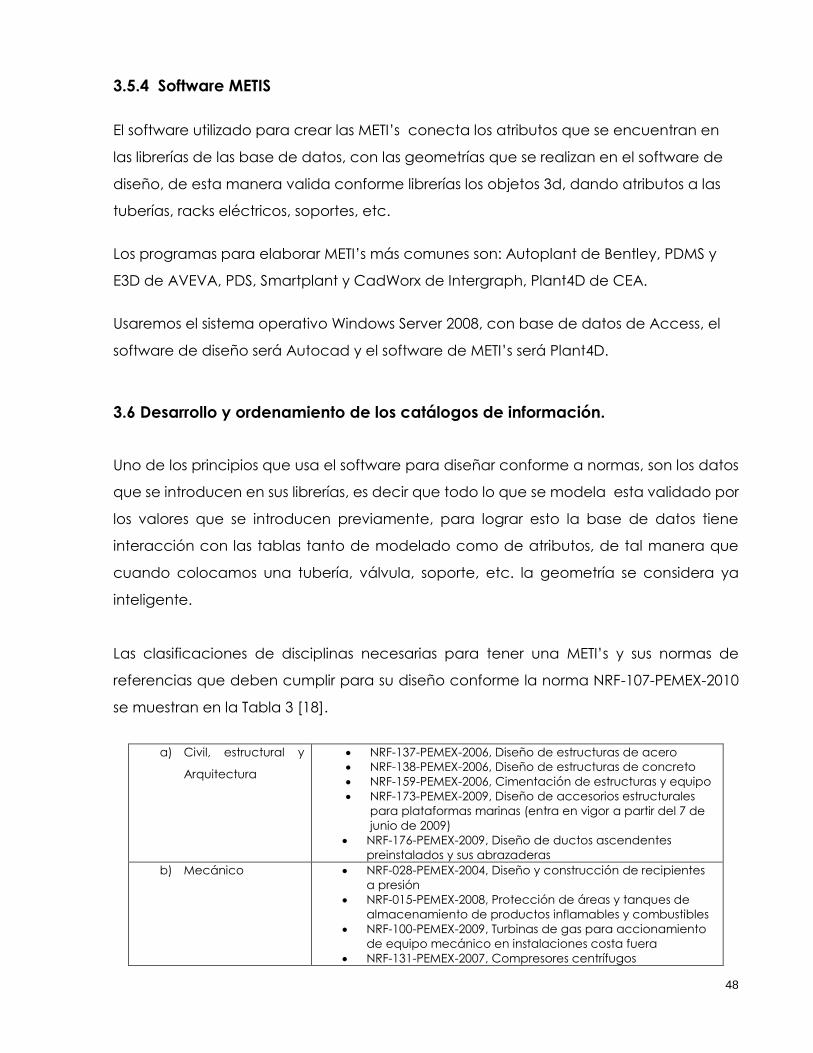
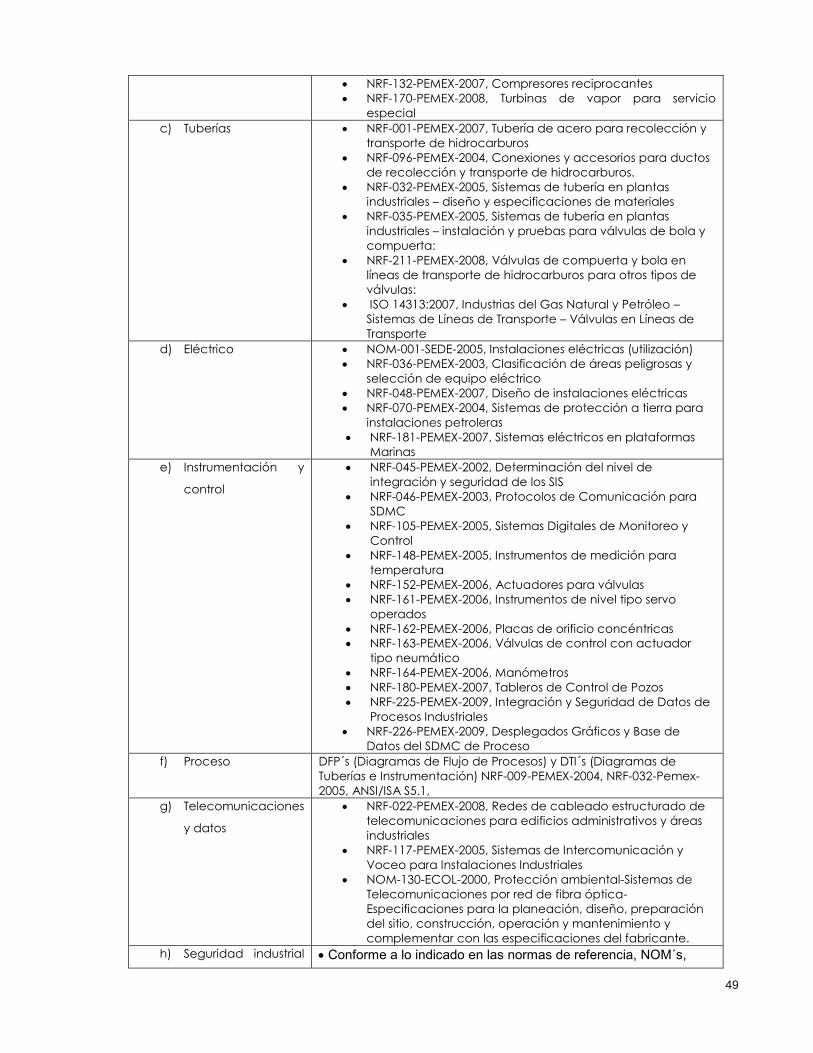
Las clasificaciones de disciplinas necesarias para tener una METI’s y sus normas de
referencias que deben cumplir para su diseño conforme la norma NRF-107-PEMEX-2010
se muestran en la Tabla 3 [18].
a) Civil, estructural y
Arquitectura
NRF-137-PEMEX-2006, Diseño de estructuras de acero
NRF-138-PEMEX-2006, Diseño de estructuras de concreto
NRF-159-PEMEX-2006, Cimentación de estructuras y equipo
NRF-173-PEMEX-2009, Diseño de accesorios estructurales
para plataformas marinas (entra en vigor a partir del 7 de
junio de 2009)
NRF-176-PEMEX-2009, Diseño de ductos ascendentes
preinstalados y sus abrazaderas
b) Mecánico NRF-028-PEMEX-2004, Diseño y construcción de recipientes
a presión
NRF-015-PEMEX-2008, Protección de áreas y tanques de
almacenamiento de productos inflamables y combustibles
NRF-100-PEMEX-2009, Turbinas de gas para accionamiento
de equipo mecánico en instalaciones costa fuera
NRF-131-PEMEX-2007, Compresores centrífugos
49
NRF-132-PEMEX-2007, Compresores reciprocantes
NRF-170-PEMEX-2008, Turbinas de vapor para servicio
especial
c) Tuberías NRF-001-PEMEX-2007, Tubería de acero para recolección y
transporte de hidrocarburos
NRF-096-PEMEX-2004, Conexiones y accesorios para ductos
de recolección y transporte de hidrocarburos.
NRF-032-PEMEX-2005, Sistemas de tubería en plantas
industriales – diseño y especificaciones de materiales
NRF-035-PEMEX-2005, Sistemas de tubería en plantas
industriales – instalación y pruebas para válvulas de bola y
compuerta:
NRF-211-PEMEX-2008, Válvulas de compuerta y bola en
líneas de transporte de hidrocarburos para otros tipos de
válvulas:
ISO 14313:2007, Industrias del Gas Natural y Petróleo –
Sistemas de Líneas de Transporte – Válvulas en Líneas de
Transporte
d) Eléctrico NOM-001-SEDE-2005, Instalaciones eléctricas (utilización)
NRF-036-PEMEX-2003, Clasificación de áreas peligrosas y
selección de equipo eléctrico
NRF-048-PEMEX-2007, Diseño de instalaciones eléctricas
NRF-070-PEMEX-2004, Sistemas de protección a tierra para
instalaciones petroleras
NRF-181-PEMEX-2007, Sistemas eléctricos en plataformas
Marinas
e) Instrumentación y
control
NRF-045-PEMEX-2002, Determinación del nivel de
integración y seguridad de los SIS
NRF-046-PEMEX-2003, Protocolos de Comunicación para
SDMC
NRF-105-PEMEX-2005, Sistemas Digitales de Monitoreo y
Control
NRF-148-PEMEX-2005, Instrumentos de medición para
temperatura
NRF-152-PEMEX-2006, Actuadores para válvulas
NRF-161-PEMEX-2006, Instrumentos de nivel tipo servo
operados
NRF-162-PEMEX-2006, Placas de orificio concéntricas
NRF-163-PEMEX-2006, Válvulas de control con actuador
tipo neumático
NRF-164-PEMEX-2006, Manómetros
NRF-180-PEMEX-2007, Tableros de Control de Pozos
NRF-225-PEMEX-2009, Integración y Seguridad de Datos de
Procesos Industriales
NRF-226-PEMEX-2009, Desplegados Gráficos y Base de
Datos del SDMC de Proceso
f) Proceso DFP´s (Diagramas de Flujo de Procesos) y DTI´s (Diagramas de
Tuberías e Instrumentación) NRF-009-PEMEX-2004, NRF-032-Pemex-
2005, ANSI/ISA S5.1,
g) Telecomunicaciones
y datos
NRF-022-PEMEX-2008, Redes de cableado estructurado de
telecomunicaciones para edificios administrativos y áreas
industriales
NRF-117-PEMEX-2005, Sistemas de Intercomunicación y
Voceo para Instalaciones Industriales
NOM-130-ECOL-2000, Protección ambiental-Sistemas de
Telecomunicaciones por red de fibra óptica-
Especificaciones para la planeación, diseño, preparación
del sitio, construcción, operación y mantenimiento y
complementar con las especificaciones del fabricante.
h) Seguridad industrial Conforme a lo indicado en las normas de referencia, NOM´s,
50
Tabla 3.- Clasificación de disciplinas y sus normas de referencias conforme la norma NRF-032-
PEMEX-2010
Para la creación de los catálogos se realizan las geometrías 2D y 3D en el Component
Builder de Plant4D utilizando formas primarias como esferas, cubos, cuadrados, torus,
pirámides, líneas, círculos, cuadrados, etc. Dado a que el nivel de modelado será el 1,
que en la norma NRF-107-PEMEX-2010 esta descrito como solidos de formas geometrías
básicas, las formas primitivas de los componentes son suficientes.
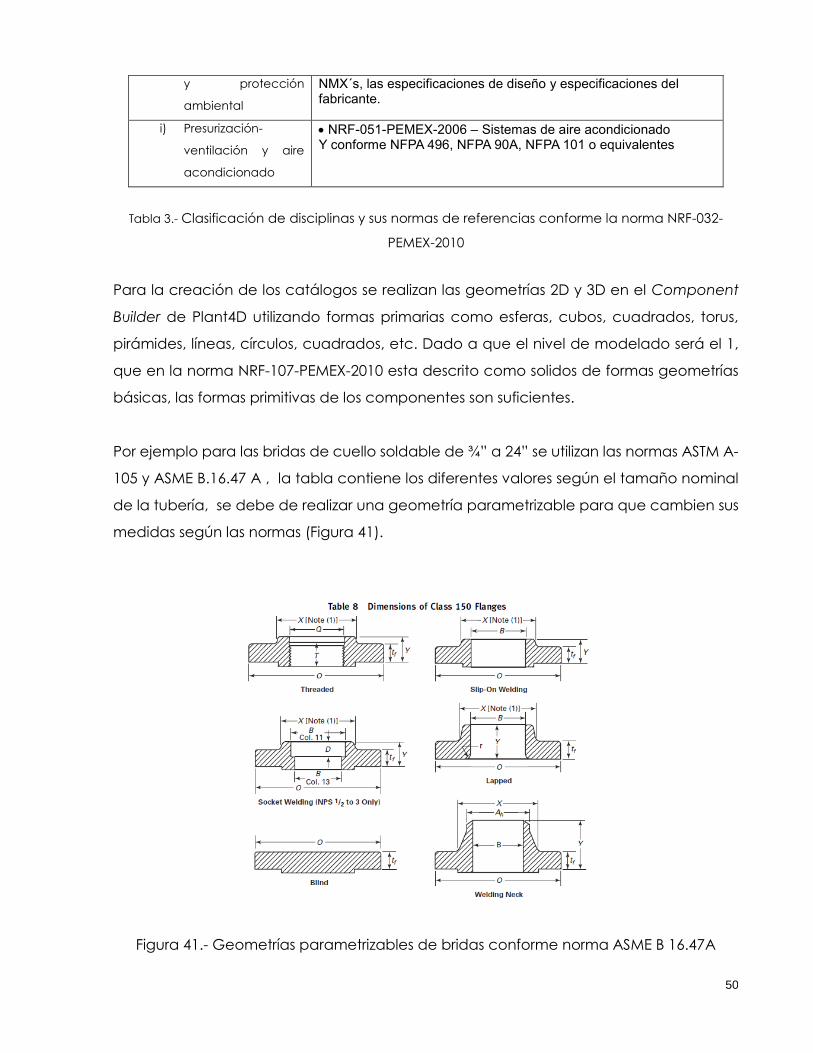
Por ejemplo para las bridas de cuello soldable de ¾” a 24” se utilizan las normas ASTM A-
105 y ASME B.16.47 A , la tabla contiene los diferentes valores según el tamaño nominal
de la tubería, se debe de realizar una geometría parametrizable para que cambien sus
medidas según las normas (Figura 41).
Figura 41.- Geometrías parametrizables de bridas conforme norma ASME B 16.47A
y protección
ambiental
NMX´s, las especificaciones de diseño y especificaciones del fabricante.
i) Presurización-
ventilación y aire
acondicionado
NRF-051-PEMEX-2006 – Sistemas de aire acondicionado Y conforme NFPA 496, NFPA 90A, NFPA 101 o equivalentes

51
Tabla 4.- Dimensiones de válvulas según su tipo y diámetro.
Por lo que para realizar la geometría en 3D se utiliza un cilindro y un cono, suficiente para
la forma básica de la brida, al tener parametrizable las figuras primitivas se cambia su
tamaño automáticamente al cambiar el tamaño nominal de la tubería, finalmente se
agregan los nodos que son básicamente los puntos de conexión (Figura 42).
Figura 42.- Parametrización de bridas en software Plant4D.
52
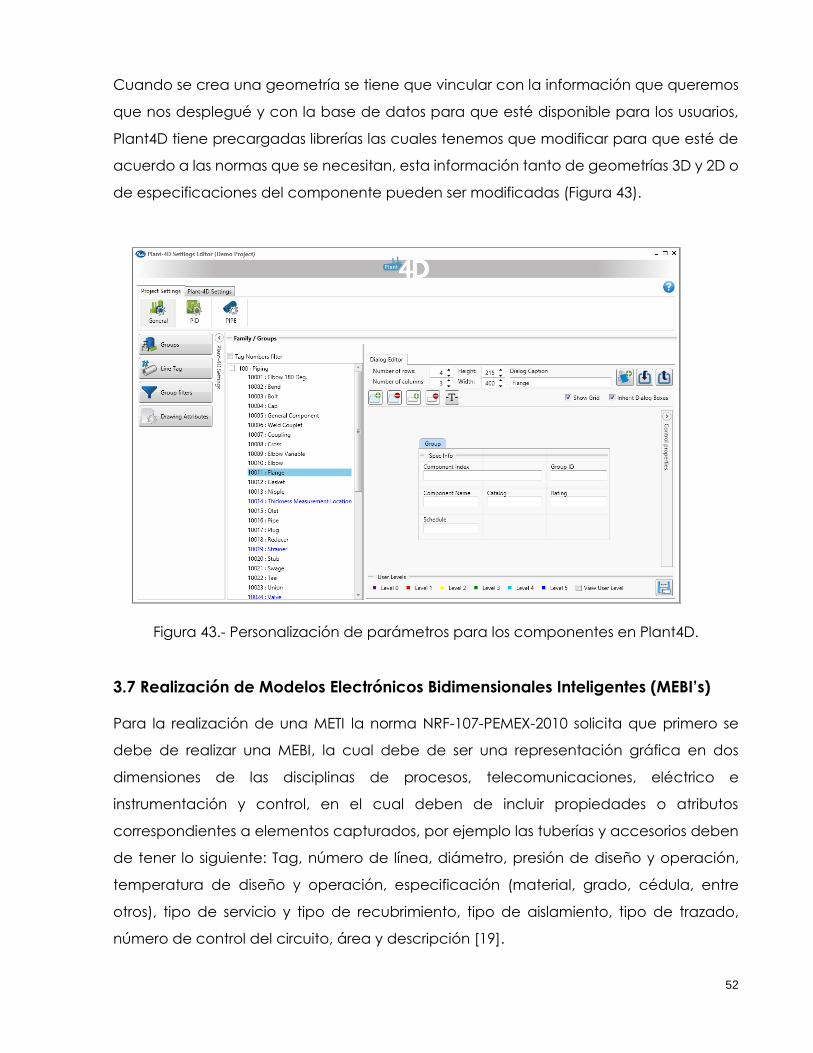
Cuando se crea una geometría se tiene que vincular con la información que queremos
que nos desplegué y con la base de datos para que esté disponible para los usuarios,
Plant4D tiene precargadas librerías las cuales tenemos que modificar para que esté de
acuerdo a las normas que se necesitan, esta información tanto de geometrías 3D y 2D o
de especificaciones del componente pueden ser modificadas (Figura 43).
Figura 43.- Personalización de parámetros para los componentes en Plant4D.
3.7 Realización de Modelos Electrónicos Bidimensionales Inteligentes (MEBI’s)
Para la realización de una METI la norma NRF-107-PEMEX-2010 solicita que primero se
debe de realizar una MEBI, la cual debe de ser una representación gráfica en dos
dimensiones de las disciplinas de procesos, telecomunicaciones, eléctrico e
instrumentación y control, en el cual deben de incluir propiedades o atributos
correspondientes a elementos capturados, por ejemplo las tuberías y accesorios deben
de tener lo siguiente: Tag, número de línea, diámetro, presión de diseño y operación,
temperatura de diseño y operación, especificación (material, grado, cédula, entre
otros), tipo de servicio y tipo de recubrimiento, tipo de aislamiento, tipo de trazado,
número de control del circuito, área y descripción [19].
53
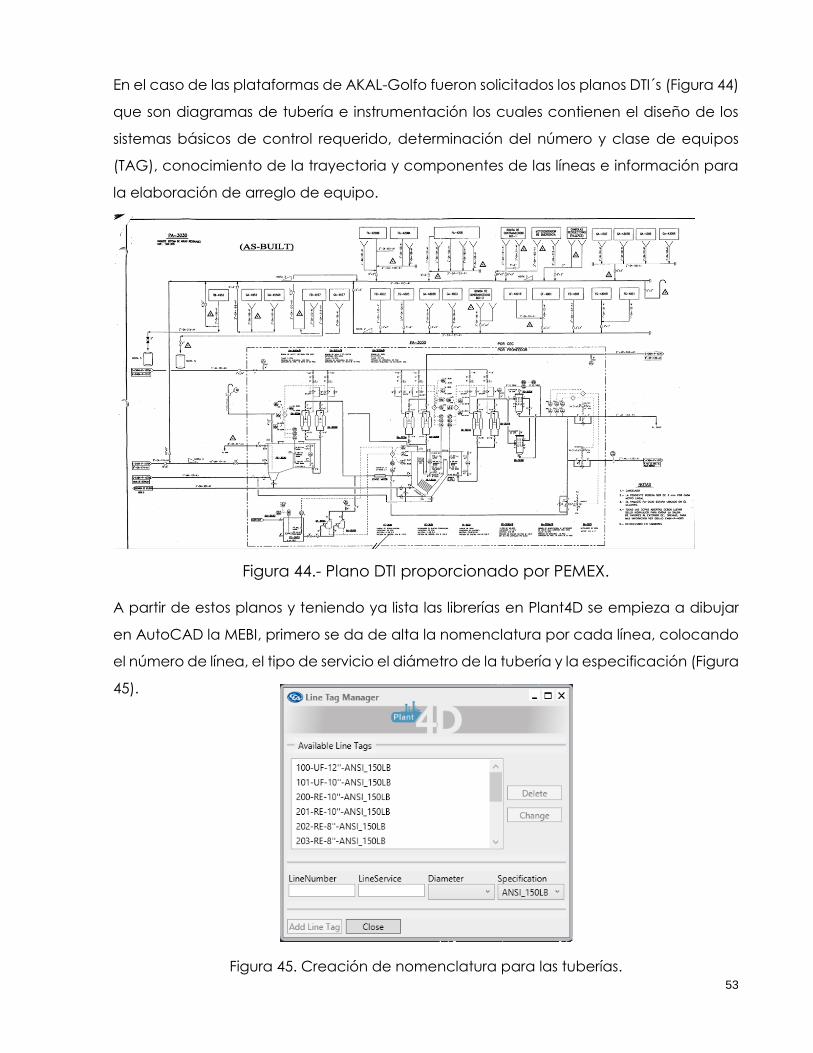
En el caso de las plataformas de AKAL-Golfo fueron solicitados los planos DTI´s (Figura 44)
que son diagramas de tubería e instrumentación los cuales contienen el diseño de los
sistemas básicos de control requerido, determinación del número y clase de equipos
(TAG), conocimiento de la trayectoria y componentes de las líneas e información para
la elaboración de arreglo de equipo.
Figura 44.- Plano DTI proporcionado por PEMEX.
A partir de estos planos y teniendo ya lista las librerías en Plant4D se empieza a dibujar
en AutoCAD la MEBI, primero se da de alta la nomenclatura por cada línea, colocando
el número de línea, el tipo de servicio el diámetro de la tubería y la especificación (Figura
45).
Figura 45. Creación de nomenclatura para las tuberías.

54
Teniendo listas la nomenclatura de las líneas se selecciona una para poder empezar a
dibujar e ir colocando los componentes sobre ella, cuando se inserta un componente
como una válvula check el programa solicita que se le dé un nombre al elemento
conforme el DTI (Figura 46).y a continuación se introduzcan los atributos del componente,
como temperatura de operación, presión máxima, espesor de recubrimiento, color, etc.
(Figura 47).
Figura 46.- Nomenclatura de componentes conforme DTI.
Figura 47.- Tabla para llenado de atributos para una válvula check.

55
Al terminar de dibujar los PID por disciplina se obtiene la MEBI y se considera inteligente
ya que tiene asociados propiedades y atributos de cada elemento (Figura 48).
Figura 48.- MEBI realizada en Plant4D y DTI proporcionado por PEMEX.
3.8 Realización de Modelos Electrónicos Tridimensionales Inteligentes (METI’s)
Cuando se tiene realizado la MEBI’s cada componente tiene asignado su Tag,
propiedades y atributos, pero al ser una representación gráfica no tiene dimensiones
reales, con el uso de la nube de puntos como guía todas los componentes en 3D que se
coloquen tendrán las medidas más reales posibles.
Para poder visualizar la nube en el software de AutoCAD se utiliza el plugin de Leica
llamado CloudWorx que permite trabajar con secciones de nube de puntos, al tener
subdividida la nube por niveles y por áreas según la norma NRF-269-PEMEX-2013
utilizamos las secciones para insertarlas y dibujar usándolas como base (Figura 49).

56
Figura 49.- Importación de nube de puntos en Plant4D.
La disciplina de civil, estructura y arquitectura es la primera que se debe de modelar,
para después seguir con la mecánica, tuberías, eléctrico, instrumentos y control,
telecomunicaciones, seguridad industrial y ventilación, al estar todos los componentes
en la base de datos y que todos los usuarios puedan visualizarlos permite el trabajo
simultaneo entre disciplinas.
Para crear la base estructural de un nivel de plataforma Plant4D tiene componentes ya
cargados para que puedan ser editados, tales como barandales, plataformas
rectangulares y triangulares, escaleras, perfiles, etc.
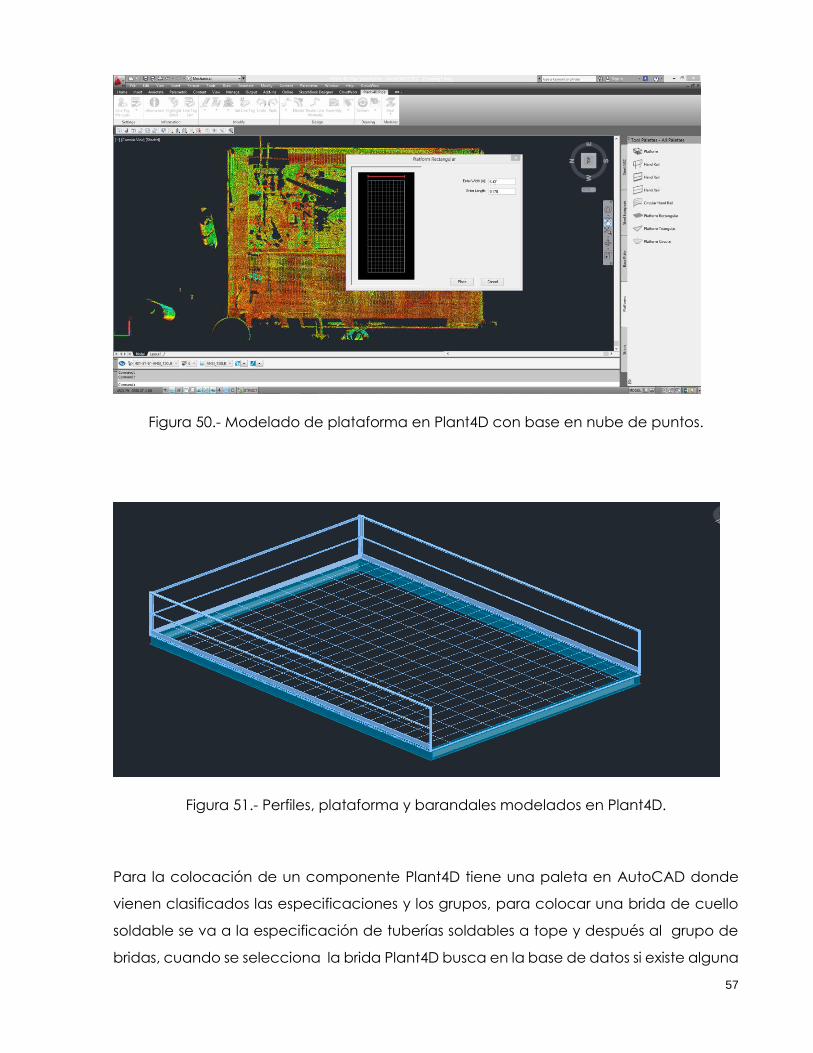
Usando como referencia la nube de puntos sacamos las medidas de ancho, largo y
altura para insertar la plataforma rectangular, y de la misma manera se colocan los
perfiles, barandales y todos los elementos civiles y estructurales para este nivel (Figuras
50 y 51).
57
Figura 50.- Modelado de plataforma en Plant4D con base en nube de puntos.
Figura 51.- Perfiles, plataforma y barandales modelados en Plant4D.
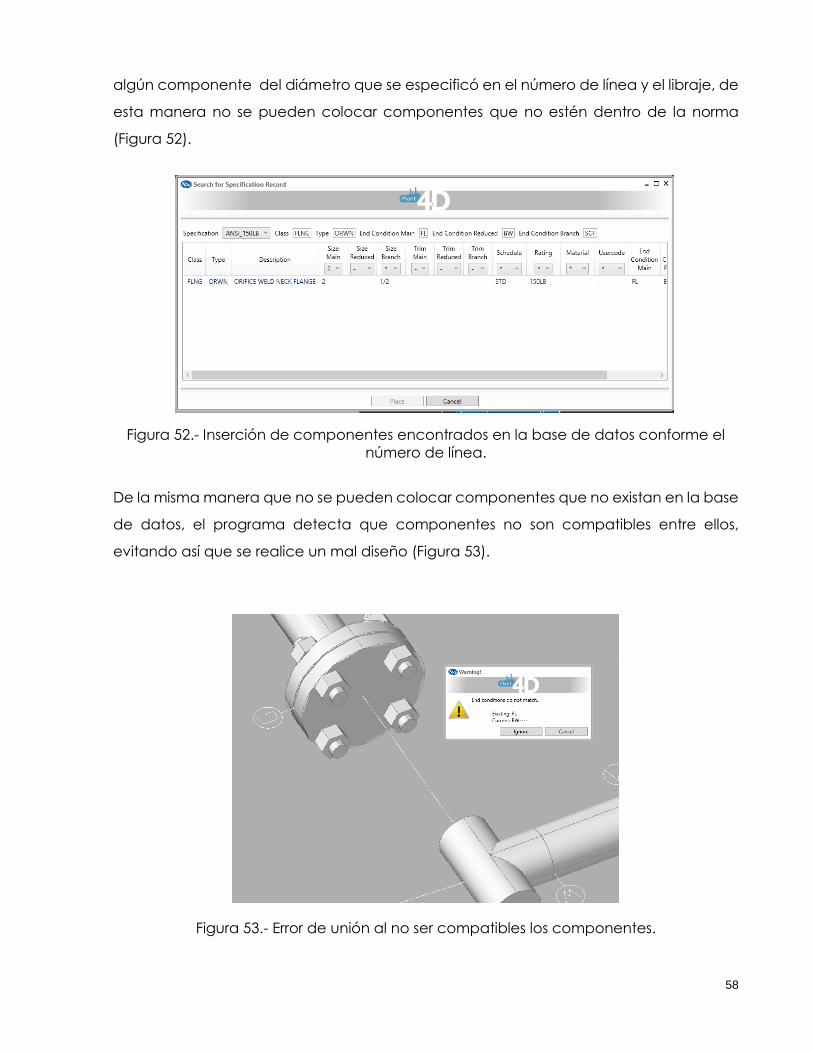
Para la colocación de un componente Plant4D tiene una paleta en AutoCAD donde
vienen clasificados las especificaciones y los grupos, para colocar una brida de cuello
soldable se va a la especificación de tuberías soldables a tope y después al grupo de
bridas, cuando se selecciona la brida Plant4D busca en la base de datos si existe alguna
58
algún componente del diámetro que se especificó en el número de línea y el libraje, de
esta manera no se pueden colocar componentes que no estén dentro de la norma
(Figura 52).
Figura 52.- Inserción de componentes encontrados en la base de datos conforme el
número de línea.
De la misma manera que no se pueden colocar componentes que no existan en la base
de datos, el programa detecta que componentes no son compatibles entre ellos,
evitando así que se realice un mal diseño (Figura 53).
Figura 53.- Error de unión al no ser compatibles los componentes.
59
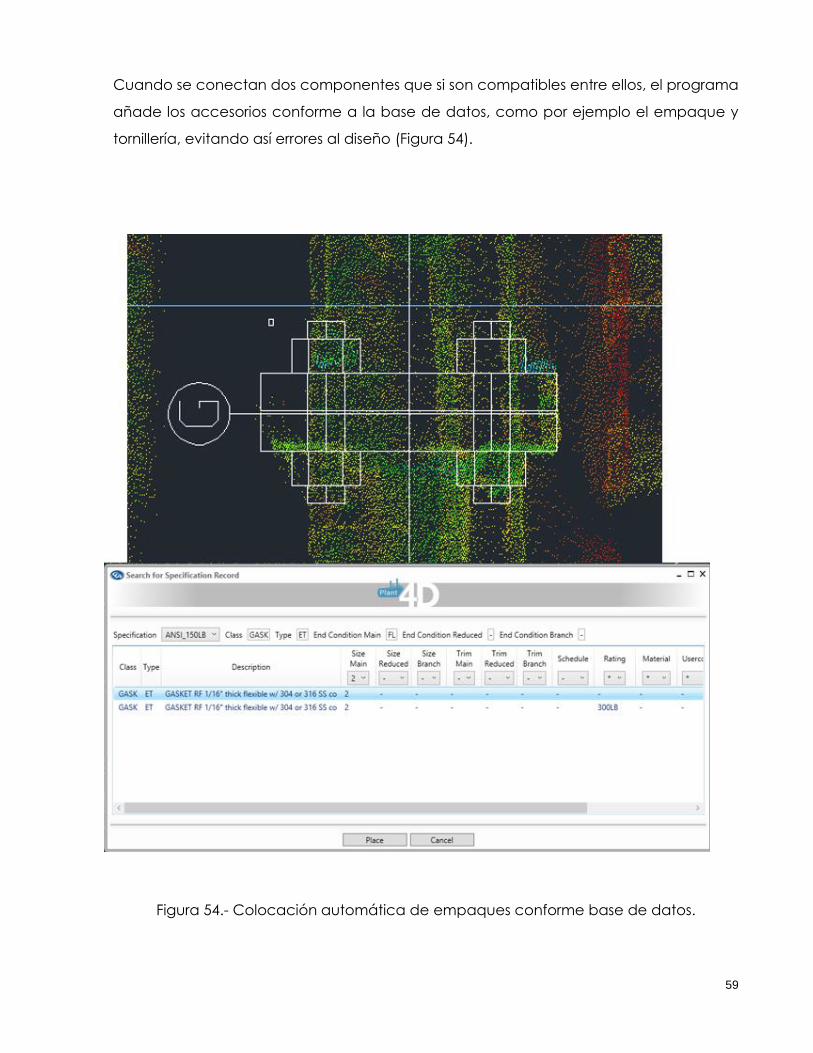
Cuando se conectan dos componentes que si son compatibles entre ellos, el programa
añade los accesorios conforme a la base de datos, como por ejemplo el empaque y
tornillería, evitando así errores al diseño (Figura 54).
Figura 54.- Colocación automática de empaques conforme base de datos.
60
Usando los componentes de la base de datos y la nube de puntos como guía, las
diferentes especialidades realizan más rápido el trabajo, con menos errores y con mayor
interacción entre ellas, pudiendo comparar las geometrías 3D con la nube de puntos en
cualquier momento.
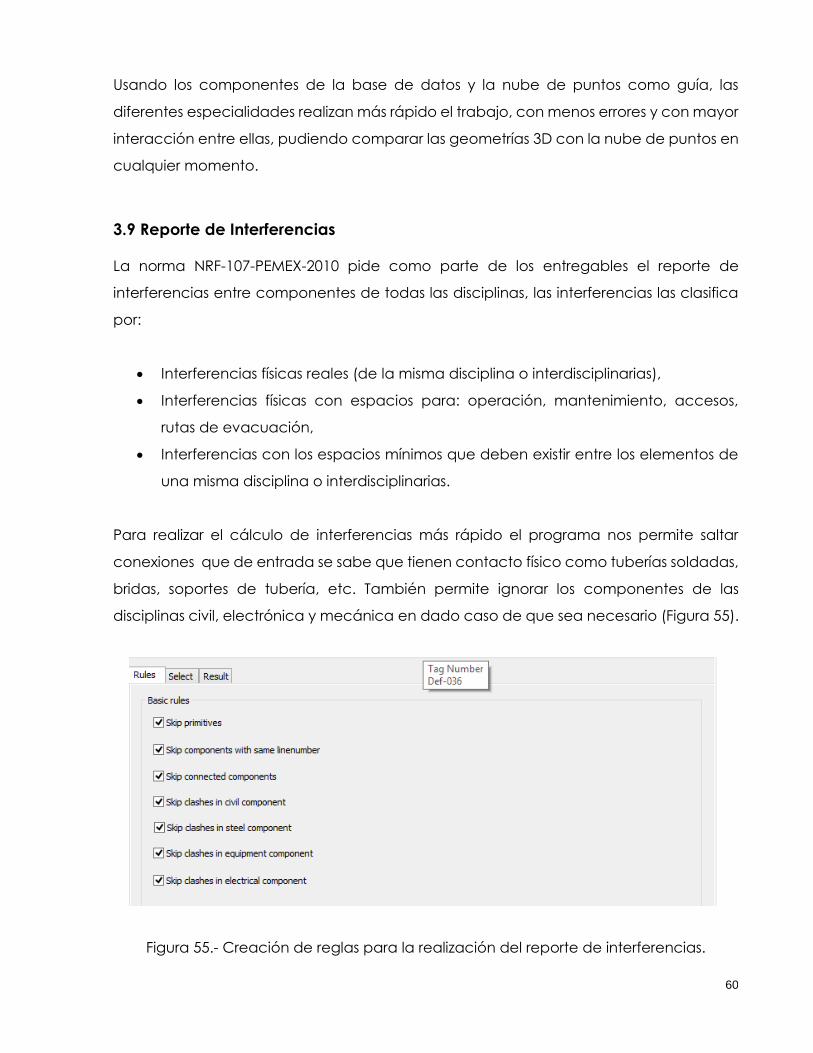
3.9 Reporte de Interferencias
La norma NRF-107-PEMEX-2010 pide como parte de los entregables el reporte de
interferencias entre componentes de todas las disciplinas, las interferencias las clasifica
por:
Interferencias físicas reales (de la misma disciplina o interdisciplinarias),
Interferencias físicas con espacios para: operación, mantenimiento, accesos,
rutas de evacuación,
Interferencias con los espacios mínimos que deben existir entre los elementos de
una misma disciplina o interdisciplinarias.
Para realizar el cálculo de interferencias más rápido el programa nos permite saltar
conexiones que de entrada se sabe que tienen contacto físico como tuberías soldadas,
bridas, soportes de tubería, etc. También permite ignorar los componentes de las
disciplinas civil, electrónica y mecánica en dado caso de que sea necesario (Figura 55).
Figura 55.- Creación de reglas para la realización del reporte de interferencias.
61
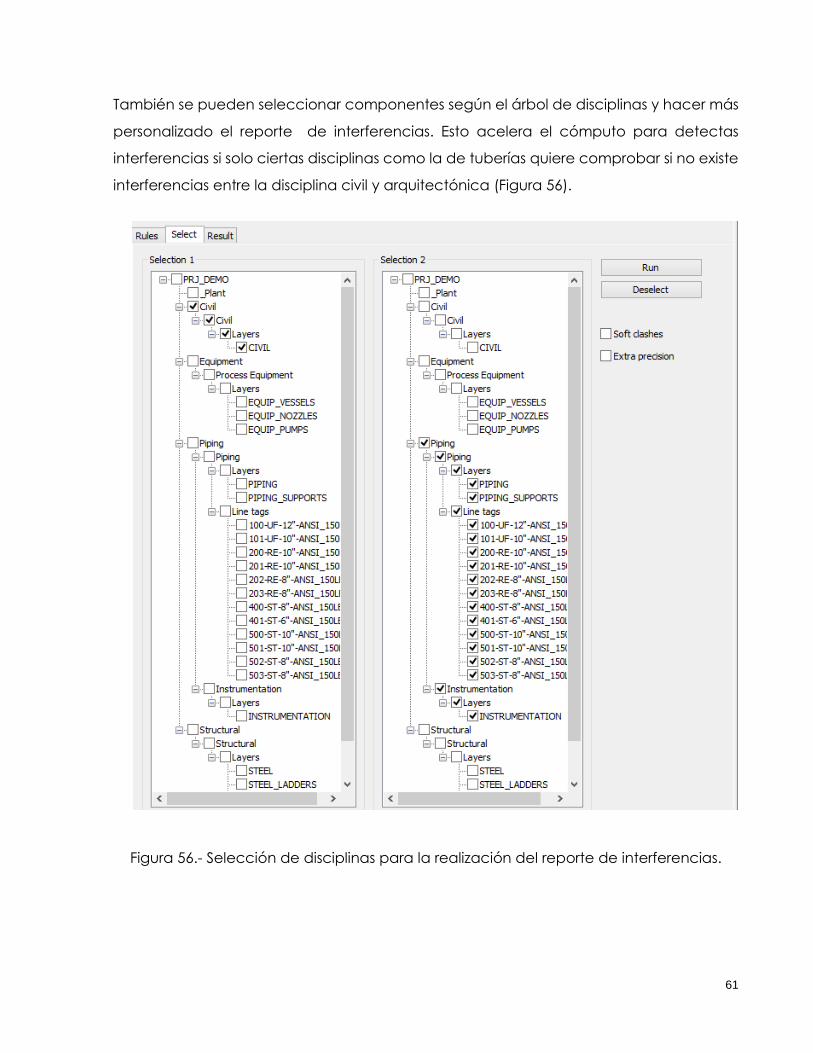
También se pueden seleccionar componentes según el árbol de disciplinas y hacer más
personalizado el reporte de interferencias. Esto acelera el cómputo para detectas
interferencias si solo ciertas disciplinas como la de tuberías quiere comprobar si no existe
interferencias entre la disciplina civil y arquitectónica (Figura 56).
Figura 56.- Selección de disciplinas para la realización del reporte de interferencias.
62
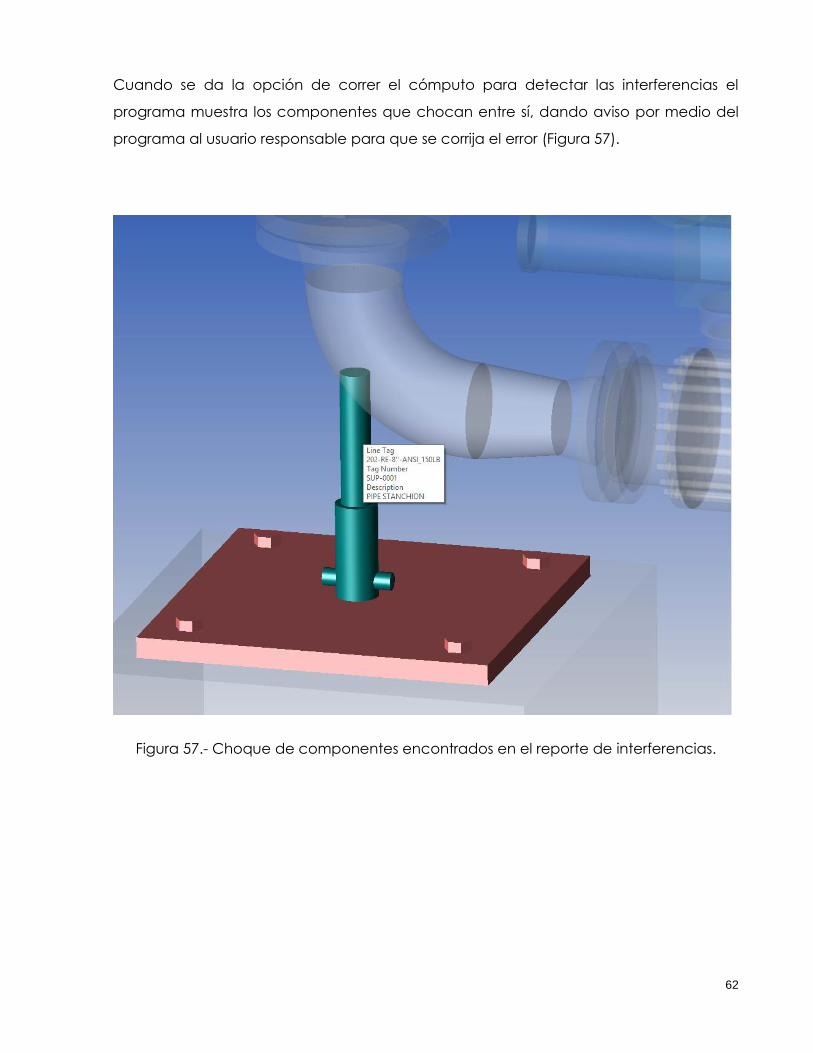
Cuando se da la opción de correr el cómputo para detectar las interferencias el
programa muestra los componentes que chocan entre sí, dando aviso por medio del
programa al usuario responsable para que se corrija el error (Figura 57).
Figura 57.- Choque de componentes encontrados en el reporte de interferencias.
63
3.10 Generación de isométricos
Uno de los puntos más fuertes de la METI’s es la generación de planos isométricos que
permite crear toda la documentación que se entrega al cliente de manera automática
ajustando los parámetros conforme la norma NRF-107-PEMEX-2010.
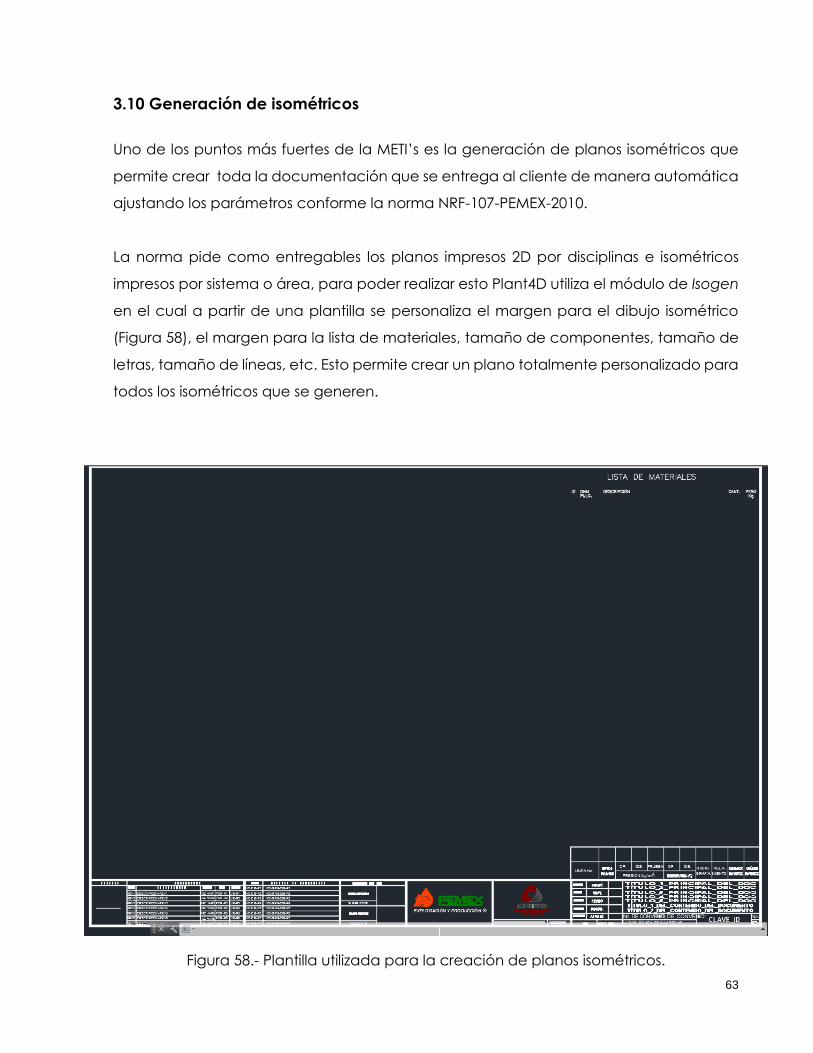
La norma pide como entregables los planos impresos 2D por disciplinas e isométricos
impresos por sistema o área, para poder realizar esto Plant4D utiliza el módulo de Isogen
en el cual a partir de una plantilla se personaliza el margen para el dibujo isométrico
(Figura 58), el margen para la lista de materiales, tamaño de componentes, tamaño de
letras, tamaño de líneas, etc. Esto permite crear un plano totalmente personalizado para
todos los isométricos que se generen.
Figura 58.- Plantilla utilizada para la creación de planos isométricos.

64
También es personalizable los símbolos que representan a los componentes ya que el
programa permite la creación de estos en dado caso que no se encuentre el que se
necesita y también modificar donde serán sus puntos de conexión, dándole al usuario
completa personalización de los documentos (Figuras 59 y 60)
Figura 59.- Personalización de símbolos para creación de planos isométricos.
Figura 60.- Modificación de puntos de conexión para creación de planos isométricos.
65
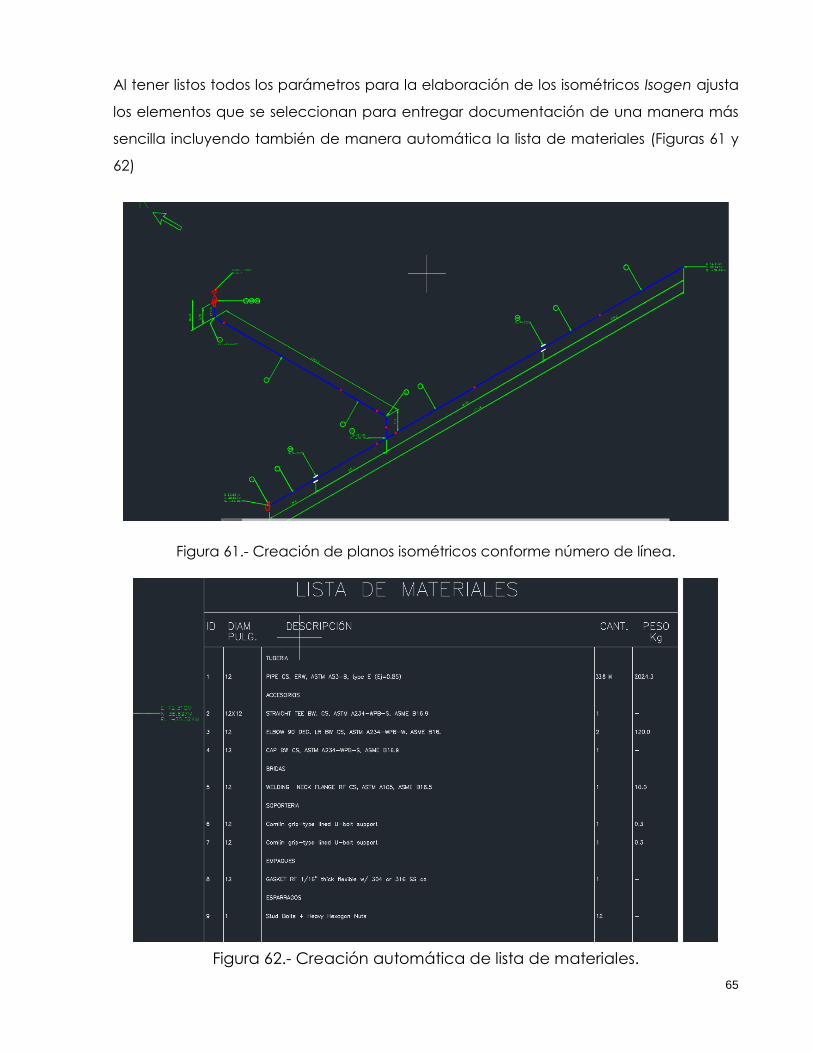
Al tener listos todos los parámetros para la elaboración de los isométricos Isogen ajusta
los elementos que se seleccionan para entregar documentación de una manera más
sencilla incluyendo también de manera automática la lista de materiales (Figuras 61 y
62)
Figura 61.- Creación de planos isométricos conforme número de línea.
Figura 62.- Creación automática de lista de materiales.
66
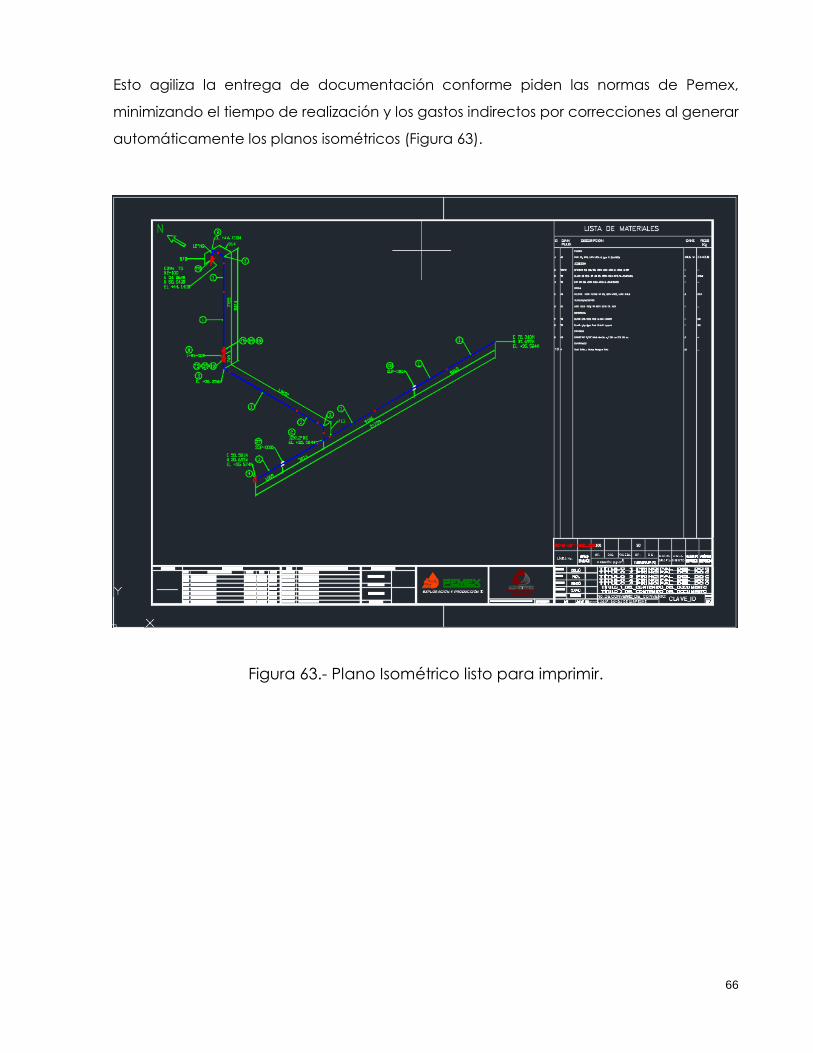
Esto agiliza la entrega de documentación conforme piden las normas de Pemex,
minimizando el tiempo de realización y los gastos indirectos por correcciones al generar
automáticamente los planos isométricos (Figura 63).
Figura 63.- Plano Isométrico listo para imprimir.
67
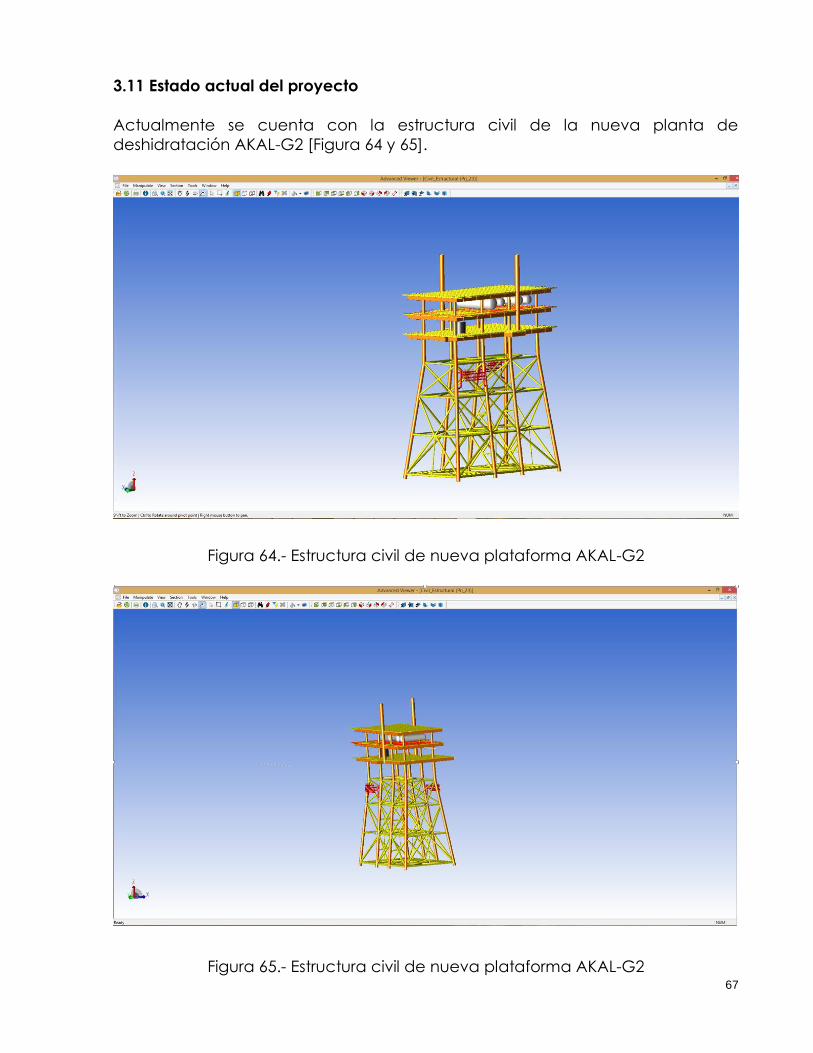
3.11 Estado actual del proyecto
Actualmente se cuenta con la estructura civil de la nueva planta de
deshidratación AKAL-G2 [Figura 64 y 65].
Figura 64.- Estructura civil de nueva plataforma AKAL-G2
Figura 65.- Estructura civil de nueva plataforma AKAL-G2
68
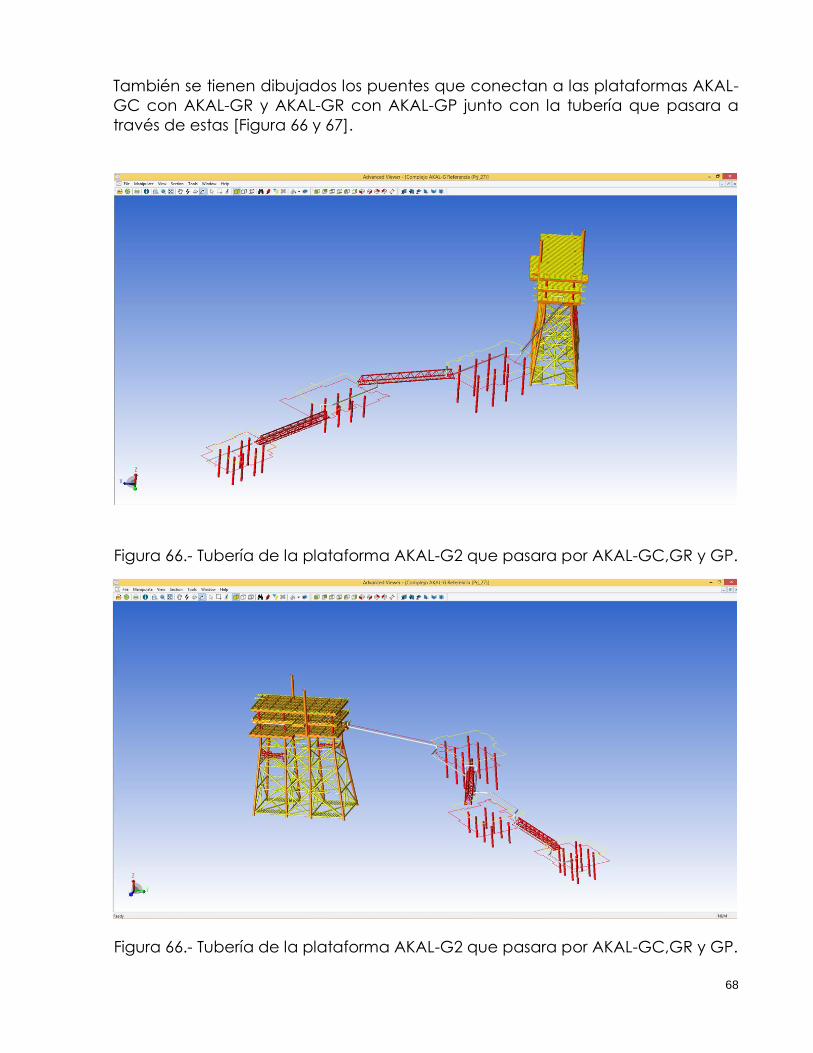
También se tienen dibujados los puentes que conectan a las plataformas AKAL-
GC con AKAL-GR y AKAL-GR con AKAL-GP junto con la tubería que pasara a
través de estas [Figura 66 y 67].
Figura 66.- Tubería de la plataforma AKAL-G2 que pasara por AKAL-GC,GR y GP.
Figura 66.- Tubería de la plataforma AKAL-G2 que pasara por AKAL-GC,GR y GP.

69
3 CONCLUSIONES
Las nuevas tecnologías del escáner láser terrestre permiten obtener en poco tiempo una
gran cantidad de información con una gran fiabilidad, esto permite explotar y utilizar
correctamente toda la información obtenida tanto a nivel arquitectónico, urbano e
industrial. Conforme al tratamiento de los datos mediante el software de Cyclone
podemos concluir que los resultados obtenidos son satisfactorios en cuanto a la precisión
de los modelos digitales y este nivel de detalle alcanzado permite modelar la METI con
facilidad ya que se tiene una referencia para realizarla.
Aunque para la realización de este proyecto las limitantes son el elevado costo del
software Plant4D y del equipo de escáner láser terrestre los beneficios son los siguientes:
Reducción sustancial de tiempo y horas hombres utilizadas en la fase de
levantamiento de información.
Reducción sustancial de tiempo y horas hombres utilizadas en la fase generación
de planos isométricos y 2D.
Reducción de tiempos y costos en logística y hospedaje.
Mayor calidad y precisión en la información de ingeniería "As built"
Menor personal en los levantamientos y por ende en áreas de alto riesgo.
Información electrónica de fácil administración y almacenamiento.
Disminución de re-trabajos en las etapas de ingeniería y construcción por las
interferencias entre componentes.
Experiencia para la planeación y ejecución de futuros proyectos.
La facilidad del manejo de información para el diseño de las METI’s permite el trabajo
de ingeniería de manera concurrente esto significa que cualquier cambio que haga
cualquier usuario se ve reflejado de manera automática evitando así errores de
duplicado de información, la correcta administración permite clasificar los niveles de
usuario y así limitar la creación, modificación, revisión y eliminación de información.
70
Esta tesina es producto de la experiencia que ha tenido nuestra área de trabajo en el
uso de la tecnología del escaneo láser. Aunque son muchos aspectos los que se deben
mejorar, los avances empiezan a ser significativos y las herramientas más fácil de usar,
debemos acompañar el perfeccionamiento del uso de las METI’s para poder
aprovecharlas y tener los servicios del centro a la altura de la tecnología.

71
4 RECOMENDACIONES
Con la planeación previa al escaneo y una inspección al objeto de estudio se obtienen
mejores resultados, ya que se calculan la cantidad y colocación de targets, los
levantamientos necesarios y la calidad y resolución de estos nos permite estimar el
tiempo necesario para realizar el proyecto. Pueden llegar a ocurrir eventualidades que
no se tengan previstas como movimiento de personal en la zona de escaneo, elementos
brillantes como metales maquinados, vidrios, agua, que producen ruido en la nube de
puntos y su eliminación manual representa un esfuerzo considerable en la totalidad del
trabajo. También se debe considerar que las plataformas al no ser un elemento
totalmente inmóvil provocan desestabilización del equipo y esto genera que algunas
tomas estén erróneas, se debe de tener mucho cuidado al usar estas tomas que no nos
sirven ya que provocan errores muy grandes en el registro final.
En casos como el escaneo en plataformas el ascenso, descenso y realizar el trabajo en
estas depende de muchas variables que no pueden ser controladas y se debe de
considerar una holgura de tiempo en la planeación y de ser conscientes de los peligros
que puedan llegar a ocurrir.
Se debe tomar en cuenta que las nubes de puntos como la del complejo AKAL-Golfo
consumen mucho espacio en la computadora donde se realice el registro ya que para
realizar la unificación total de las estaciones el programa necesita 150% de espacio libre
en la computadora de lo que pesa el proyecto, es decir las 311 tomas a color ocupan
456 GB y se necesitó 670 Gb libres para poder realizar la unificación.
Se debe tener una correcta configuración de las especificaciones de los componentes
en la base de datos, esto es fundamental para evitar errores a la hora de elaborar las
METI's ya que el usuario de cada disciplina no crea los componentes solo los llama de la
base de datos. Aunque el programa permite la creación y unión de componentes
conforme a norma no significa que estén bien diseñados, por lo que se debe de tener
especialistas en cada disciplina a los que las ventajas del software les permita realizar
más fácil su trabajo
72
5 REFERENCIAS BIBLIOGRÁFICAS [1] Morais, Denis. Waldie, Mark. Larkins, Darren. Driving the Adoption of Cutting Edge
Technology in Shipbuilding. Autodesk ® based Shipbuilding & Offshore solutions. [ 5 de
Febrero 2015]. Disponible en Web: http://www.ssi-
corporate.com/documents/white_papers/CuttingEdgeTech-COMPIT2011.pdf
[2] Jon Moe (2005) Conservation of attribute data during geometric upgrading of 3D
models. Tesis de Maestría, Universidad de Oslo, Noruega.
[3] David E. Weisberg, The Engineering Design Revolution, Mountain View, CA [ ref 15 de
Junio de 2015]. Disponible en web: http://www.cadhistory.net/toc.htm
[4] Cruz, Noe. Sale Pemex a comprar plataformas. El Universal. Disponible en Web:
http://m.eluniversal.com.mx/notas/cartera/2013/sale-pemex-a-comprar-plataformas-
105857.html
[5] García-Gómez, Ismael. Fernández, Miren. Mesanza, Amaia. (2011). Láser escáner y
nubes de puntos. Un horizonte aplicado al análisis arqueológico de edificios.
Arqueologia de la Arquitectura. ISSN 1695-2731
[6] Genechten, Björn. Santana, Maria. Seif, Assaad. Laser Scanning the Past for the
Future: Baalbek Temple. Director: Assaad Seif, Shassan Ghattas. University College St.
Lieven. Belgica 2011.
[7] Buill Pozuelo, F. Nuñez Andrés, M.A., Marambio Castillo, A. (2005). Estudio de la
calidad en la medida con escáner láser. Universidad Politecnica de Cataluña.
[8] Esparca Sánchez-garnica, F.J. (2002). Introducción a los Sistemas de Medición
Tridimensional con Láser. Mapping. ISSN: 1.131-9.100. Septiembre 2002.

73
[9] Farjas, M. Moreno, E., García Lázaro, F.J. (2011). La realidad virtual y el análisis
científico: De la nube de puntos al documento analítico. Virtual Archaeology Review.
ISSN: 1989-9947. Vol. 2°, n°4, mayo 2011.
[10] Fabris; M (2009) High resolution data from laser scanning and digital photogramtry
terrestrial methodologies. Test site: an architectural surface. ISPRS – International
Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences. Laser
Scanning. Paris, September 2009.
[11] Lerma. J.L., Navarro, S., Cabrelles, M., Seguí, A.E., Haddad, N., Akasheh, T. (2011).
Integration of láser Scanning and Imagery for Photorealistic 3D Architectural
Documentation. Láser Scanning, Theory and Applications, Marzo 2011.
[12] Ingesand, H., A. Ryf, and T. Schulz. Performances and experiences in terrestrial
scanning. in Proc. Optical 3D Measurement Techniques. 2003. Zurich, Switzerland.
[13] Mechelke, K., T.P. Kersten, and M. Lindstaedt. Comparitive investigations into
accuracy behaviour of the new generation of terrestrial laser scanning systems. in
Optical 3D Measuremnet techniques VIII. 2007. Zurich.
[14] Saubra, O.P., Lorenzo, A. (2004). Aplicaciones de láser escáner 3D Trimble-MENSI en
estudios de accidentes y de criminología (forensics). Trimble 2004.
[15 ] Abmayr, T. Härt,F, Renköster,M., Fröhlivh, C.(2005). Terrestrial laser scanning-
Applications in cultural heritage conservation and civil engineering. GmbH. Germany
[16] Sternberg, H., Kersten, T. (2007). Comparison of terrestrial laser scanning systems in
industrial as-built documentation applicatons. Optical 3-D Measurement Techniques VIII.
Vol. I. Zurizh, July 2007.
García-Gomez, Ismael,. Fernández, Miren., Mesanza, Amaia,.(2011),. Láser escáner y
nubes de puntos. Un horizonte aplicado al análisis arqueológico de edificios.,
Arqueología de la arquitectura. ISSN 1695-2731., Diciembre 2011.
74
[17] NRF 269- PEMEX- 2013- Levantamiento con equipo láser 3D para generación de
información técnica de instalaciones Junio 2013.
[18] NRF-107-PEMEX-2010. Modelos Electrónicos Bidimensionales y Tridimensionales
Inteligentes para Instalaciones. Mayo de 2005.
[19] NRF-032-PEMEX-20212 Sistemas de Tubería en Plantas Industriales, Diseño y
Especificaciones de Materiales. Marzo 2006