Trabajo de Graduación Francisco J. García Castillo 12 · operación se conocen con el nombre de...
46
Trabajo de Graduación Francisco J. García Castillo Capítulo II 12
Transcript of Trabajo de Graduación Francisco J. García Castillo 12 · operación se conocen con el nombre de...

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
12

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
13
CCCAAAPPPIIITTTUUULLLOOO IIIIII
PPPRRRIIINNNCCCIIIPPPIIIOOOSSS BBBAAASSSIIICCCOOOSSS DDDEEELLL PPPRRROOOCCCEEESSSAAAMMMIIIEEENNNTTTOOO
DDDEEE SSSEEEÑÑÑAAALLLEEESSS DDDIIIGGGIIITTTAAALLLEEESSS
Antes de pasar a describir como se han de procesar las señales a tratar, para
nuestro caso las señales auditivas, debemos ver los aspectos fundamentales en cuanto el
comportamiento de las señales y aquellos sistemas utilizados para su procesamiento.
Como las señales que trabajaremos son de carácter discreto nos enfocaremos
principalmente a este tema. Cabe destacar que por ser este tema tan amplio nos
dedicaremos a presentarlo a manera de enunciado con un breve análisis de cada punto; de
forma que podamos utilizar estos tratados como herramienta de trabajo.
222...111 CCCOOONNNCCCEEEPPPTTTOOOSSS GGGEEENNNEEERRRAAALLLEEESSS DDDEEE SSSEEEÑÑÑAAALLLEEESSS YYY SSSIIISSSTTTEEEMMMAAASSS
222...111...111 ¿¿¿QQQuuueee EEEsss uuunnnaaa SSSeeeñññaaalll??? ... ¿¿¿QQQuuuééé eeesss uuunnn SSSiiisssttteeemmmaaa???
Una señal se define como una cantidad física que varía con el tiempo, el espacio o
cualquier otra variable o variables independientes. Matemáticamente, una señal se
expresa como una función de una o más variables independientes, por ejemplo:

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
14
S(t) = Acos(ωωt + φφ) ec 2.1
R(t) = 5t +10t2 ec. 2.2
Z(x,y) = 3x + 8x3 –7xy2 ec. 2.3
Hay diversos fenómenos que no pueden ser descritos de manera práctica
utilizando este tipo de funciones; por ejemplo las señales de voz, los electrocardiogramas
y los electroencefalogramas.
Estudiemos un momento el caso de la generación de voz, conocemos que estas
son creadas al forzar pasar el aire a través de las cuerdas vocales. Por tanto, la forma en
que se generan las señales están asociadas con un sistema que responde a un estímulo o
fuerza. Para el caso de la señal de voz el sistema esta asociado con las cuerdas vocales y
la cavidad bucal. El estimulo en conjunto con el sistema se conocen generalmente como
fuente de la señal.
El significado de sistema va más allá del antes enunciado. Es así que también se
denomina como sistema a aquel dispositivo físico que realiza una operación sobre una
señal. Si realizamos este tipo de operación a alguna señal que atraviese un sistema,
decimos que hemos procesado la señal.
Generalmente al sistema se le conoce según el tipo de operación que realice. Si
el sistema realiza una operación lineal el sistema se conoce como lineal; si la operación
es no lineal al sistema se le conoce como no lineal. Pero el significado de sistema no
sólo abarca el sentido físico, sino también las operaciones que se le puedan aplicar a una
señal por medio software. Por ejemplo, para el procesamiento digital de una señal por
medio de un sistema computacional muchas de las operaciones matemáticas aplicadas a
la señal son especificadas mediante vía software. Para estos casos el programa
representa una implementación del sistema en software. Este proceso puede darse vía
hardware configurado para realizar las operaciones especificadas. En un sentido más
amplio un sistema digital puede ser la combinación de hardware y software cada uno de
los cuales desempeña su propio conjunto de funciones.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
15
Muchas de las operaciones que se les desea aplicar a un sistema se pueden
expresar matemáticamente. El método o conjunto de reglas para implementar el sistema
mediante un programa que ejecuta las operaciones matemáticas correspondientes se les
denomina algoritmo.
2.1.2 Clasificación De Las Señales
Los métodos utilizados para el procesamiento de una señal o del análisis de la
respuesta de una señal dependen en gran manera de las características de la señal en
particular. Por tal motivo, debemos poder identificar el tipo de señal a estudiar para
darle una clasificación especifica de manera tal que se le pueda tratar adecuadamente. A
continuación describimos brevemente algunas clasificaciones comunes para señales.
Señales Multicanales y Multidimensionales
Como hablamos anteriormente una señal puede ser representada por una función
matemática de una o más variables independientes. La variable dependiente puede ser
entonces una cantidad escalar, vectorial, real o compleja. Las señales muchas veces son
generadas por múltiples fuentes o sensores. Es posible que estas fuentes generen una
señal que se represente en forma vectorial, conociéndose a este tipo de señales como
multicanales, por ejemplo:
=
)t(s
)t(s
)t(s
)t(S
3
2
1
3 ec 2.4
donde sK(t) para k=1, 2, 3; denotan componentes de la señal vectorial original.
Las señales también se pueden clasificar según la cantidad de variables
independientes que la definan. Así tenemos que para una señal cuya función es definida
sólo por una variable independiente se le conoce como unidimensional. Si son M
variables independientes las que definen las señal se conoce como señal M-dimensional.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
16
Señales En Tiempo Continuo y Señales En Tiempo Discreto
Las señales se pueden clasificar en dos categorías diferentes dependiendo de las
características de la variable independiente tiempo y los valores que esta pueda tomar.
• Señales en tiempo continuo o señales análogas:
Están definidas para todos los valores del tiempo y pueden tomar cualquier valor en el
intervalo de tiempo (a,b) donde a puede ser -∞ y b puede ser ∞. Matemáticamente
estas señales se describen por funciones continuas de variables continuas. Ejemplo:
x1(t) = sen(πt), x2(t) = e-t para ∞− < t< ∞ .
• Señales en tiempo discreto:
Están definidas sólo en ciertos instantes de tiempo. Estos puntos no necesitan estar
equidistantes, sin embargo en la práctica se toman instantes equiespaciados. Un
ejemplo de señal discreta es la representada por la función x(tn) = nte , para n = 0, ±1,
±2,.... . Si usamos el índice n como variable independiente que representa los
instantes de tiempo, la señal pasa a ser función de una señal entera, es decir una
secuencia de números. Por lo tanto, una señal discreta puede representarse
matemáticamente como una secuencia de números reales o complejos. Para destacar
la naturaleza discreta de una señal denotamos dicha señal como x(n) en vez de x(t).
Si los instantes de tiempo están equiespaciados (tn = nT) también se utilizara x(nT).
En la práctica las señales de tiempo discreto pueden originarse de dos maneras:
(a) Eligiendo valores de una señal analógica en determinados instantes de tiempo. Este
proceso se denomina muestreo. Todos los instrumentos de medida que proporcionan
medidas en instantes de tiempo regulares generan señales en tiempo discreto.
(b) Acumulando una variable a lo largo de un determinado periodo de tiempo.
El valor de una señal en tiempo continuo o discreto puede ser del tipo continuo o
discreto. Si una señal toma todos los valores en un intervalo tanto finito como infinito,
se dice que es continua. Por el contrario, si toma valores de un conjunto finito de

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
17
valores se dice que es discreta. Normalmente estos valores son equidistantes y por tanto
pueden expresarse como múltiplos de la distancia entre dos valores sucesivos. Una señal
en tiempo discreto que toma valores discretos se denomina señal digital.
Señales Deterministas y Señales Aleatorias
Para el análisis matemático y el procesamiento de la señal se requiere que esté
descrita matemáticamente. Esta descripción matemática, conocida como modelo
matemático, crea un nuevo tipo de clasificación. Para aquellas señales que es posible
describir en forma explícita un conjunto de datos o una regla bien definida se denomina
deterministas. Este termino resalta el hecho de que valores de la señal, tanto presentes
como pasados como futuros, se conocen exactamente, sin incertidumbre.
Sin embargo en muchas situaciones reales existen señales que no puede
describirse con un grado de precisión razonable utilizando modelos matemáticos. La
ausencia de tal relación supone que dichas señales evolucionan con el tiempo en forma
impredecible. A este tipos de señales se les conoce como señales aleatorias. Un
ejemplo de este tipo de señal es la voz.
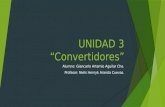
Fig. 5 Señal Senoidal Continua. Fig.6 Señal Senoidal discreta.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
18
Para señales aleatorias se ha implementado la descripción y análisis mediante
técnicas estadísticas en lugar de formulas explícitas, debido a que estudios realizados
demostraron que era viable este tipo de sistema. Es así que para estas señales se
implementan utilizando la teoría de la probabilidad y los procesos estocásticos.
2.1.3 Proceso de Conversión de Señales Continuas a Señales Digitales y Viceversa
La mayoría de las señales que rodean los ámbitos de la ingeniería y la ciencia son
de naturaleza análoga. Esta señales pueden ser procesadas directamente por sistemas
análogos adecuados para extraer las características e información que se requieran de
ella; en cuyos casos decimos que la señal ha sido tratada en forma directa.
Pero en muchos casos se ha podido comprobar que el tratamiento de estas señales
se hace más eficiente y seguro si las mismas fueran de naturaleza digital. Por tal motivo
se hace de vital importancia poder obtener una señal digital que se pueda tratar a partir de
su forma análoga. Es así que la necesidad de la transformación de señales análogas a
señales digitales.
Para realizar este proceso se requiere una interfaz denominada convertidor
análogo – digital (A/D); donde la entrada al convertidor es una señal análoga y la salida
es una señal adecuada para la entrada del procesador digital. Este procesador digital
suele ser una computadora digital programable, un pequeño microprocesador
programable o un procesador cableado configurado para que realice las operaciones
deseadas sobre la señal de entrada.
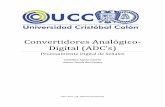
En muchas ocasiones se requiere que esta señal digital de salida del procesador se
entregue de forma analógica para una aplicación especifica. Es aquí donde se hace pues
necesario el proceso de conversión digital a análogo. Los dispositivos que realizan esta
operación se conocen con el nombre de convertidores digital – análogo (D/A). Este
proceso lo podemos observar en la figura 7.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
19
En el diagrama de bloques también se muestran otras señales que pueden formar
parte del proceso. Como podemos observar la señal de entrada al procesador puede
provenir directamente de una fuente de señales digitales, en este caso no se requiere
convertidor A/D. Similarmente la salida del procesador puede que se requiera de forma
digital para una aplicación especifica de salida, por lo tanto para estos casos no se
requerirá convertidor D/A.
Este proceso de conversión antes y después del tratamiento de la señal suele tener
más elementos que los observados anteriormente, sin embargo; el concepto de conversión
de la señal es el mismo. En los siguientes puntos aclararemos un poco más estos
procesos internos.
2.1.4 Conversión Análoga Digital
Como ya sabemos para procesar señales análogas por medios digitales se hace
necesario convertirlas en formato digital. Los dispositivos involucrados en este proceso
se conocen como convertidores análogos – digitales ADC’s. Dentro de estos dispositivos
suelen ocurrir dos procesos, que aunque conceptualmente son naturaleza distinta todos
forman parte del mismo proceso.
Estos dos pasos son el de muestreo, cuantificación (y codificación); los cuales
pasamos a detallar a continuación.
CONVERTIDOR
A/D
PROCESADOR
DIGITAL
CONVERTIDOR
D/ASeñalanálogadeentrada
Señaldigital deentrada
Señaldigital desalida
Señaldigital desalida
Fig. 7 Diagrama de bloques general de un sistema digital para el procesado de señales

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
20
Muestreo:
Esta es la conversión de una señal en tiempo continuo a una señal en tiempo
discreto por medio de muestras de la señal de entrada en tiempos discretos.
Existen diversos tipos de operaciones de muestreo de importancia práctica:
• Muestreo periódico. En este caso, los instantes de muestres están
equiespaciados de manera uniforme a tk = kT ( k = 0, 1, 2....). Este tipo de
muestreo es el más convencional
• Muestreo de orden múltiple. El patrón de los tk se repite periódicamente; es
decir, tk+r es constante para todo k.
• Muestreo de tasa múltiple. En un sistema de control que tiene lazos
múltiples, la mayor constante de tiempo involucrada en un lazo puede diferir
en gran medida de las de los otros lazos. Por lo tanto, puede ser aconsejable
muestrear lentamente en un lazo que involucre una constante de tiempo
grande, mientras que un lazo que involucre constantes de tiempo pequeñas la
tasa de muestreo debe ser más rápida. De esta manera, un sistema digital
puede tener diferentes periodos de muestreo en diferentes trayectorias de
retroalimentación o bien utilizar tasas de muestreo múltiples .
• Muestreo aleatorio. En este caso, los instantes de muestreo son aleatorios,
o t, es una variable aleatoria.
El método a utilizar por nosotros corresponde al muestreo periódico. Como
hemos visto para este tipo de muestreo se toman muestras a intervalos periódicos de
tiempo de una señal análoga de frecuencia F; a este intervalo de muestreo se le conoce
como periodo de muestreo (T) y su inverso 1/T = Fs como velocidad de muestreo
(muestras por segundos) o frecuencia de muestreo (hertz). De esta forma este tipo de
muestreo crea una relación entre las variables t y n de tiempo continuo y tiempo discreto,
respectivamente; esta relación se muestra a continuación
t = nT = n / Fs ec. 2.5

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
21
De igual manera existe una relación entre la variable de frecuencia F (ó Ω) de las
señales análogas y la variable f (ó ω) de las señales discretas, definidas de la siguiente
relación:
f = F / Fs ec. 2.6
ωω = ΩΩT ec. 2. 7
recordando que ω = 2πf y Ω = 2πF.
Esta correspondencia entre variables de frecuencia se ve asociada al rango de
existencia de ellas. Este esta dado por:
-∞∞ < ΩΩ < ∞∞ ec. 2.8
-ππ < ωω < ππ ec. 2. 9
El muestreo de toda señal debe cumplir con el teorema del Muestreo.
Teorema del muestreo
Si se define ωs, como 2π/T, donde T es el periodo de muestreo; y ω1 como la
componente de mayor frecuencia presente en la señal de tiempo continuo x(t) y la señal
x*(t) como la señal muestreada.
Sólo se podrá reconstruir completamente x(t) a partir de x*(t) si durante el periodo
de muestreo se cumple con la condición de que ωs sea mayor a 2ω1 (ωs > 2ω1).
El incumplimiento de este teorema al momento del muestreo introduce
distorsiones a la señal muestreada y utilizada de esta forma puede crear errores al
momento de reconstruir la señal o en el tratamiento de ella. Estos inconvenientes
generalmente son el doblamiento, traslape, y oscilaciones escondidas de la señal original;
comúnmente llamados fenómenos de aliasing.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
22
Cuantificación y Codificación:
Es el proceso donde la señal en tiempo discreto con valores continuos se
convierte en una señal en tiempo discreto pero con valores discretos (señal digital). Aquí
el valor de cada muestra de la señal se representa mediante un valor seleccionado de un
conjunto finito de valores posibles.
El estado de salida de cualquier muestra cuantificada se describe entonces
mediante un código numérico; esto se conoce como codificación. De este modo, la
codificación es el proceso de asignación de una palabra o código digital a cada uno de
los estados discretos. Generalmente el código utilizado para este proceso es el código
binario en el cuál existen n pulsos que indican el encendido (1) o apagado (0) de cada
pulso. Para la cuantificación los n pulsos representan 2n niveles de amplitud de salida o
estados de salida.
El nivel de cuantificación Q se define como el intervalo entre dos puntos
adyacentes de decisión y esta dado mediante:
Q = (FSR) / 2n =LSB ec 2.10
donde FSR es el intervalo a escala completa y LSB es el bit menos significativo.
Estos procesos afectan la señal original creando errores. El error ocasionado por
la cuantificación varia dentro de un rango de 0 y ± ½Q. Este error se puede hacer más
pequeño al disminuir el nivel de cuantificación. A este error también se le conoce como
ruido de cuantificación.
2.1.5 Conversión Digital Análoga
Para convertir una señal digital a una señal análoga utilizamos un convertidor
digital a analógico (DAC’s); cuyo objetivo es interpolar entre muestras.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
23
El teorema del muestreo especifica la interpolación óptima para una señal de
banda limitada. Sin embargo, este tipo de interpolación es demasiado complicada y, por
ello, impráctico; por tal motivo generalmente se emplean otros tipos de convertidores.
El convertidor D/A mantenedor de orden cero es el más simple de todos; y
simplemente mantiene constante el valor de una muestra hasta que recibe la siguiente.
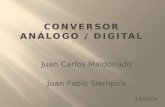
Se logra un mejor desempeño si se coloca un convertidor que realice interpolación lineal
entre muestra y muestra; a este tipo de convertidor se le conoce con el nombre de
convertidor lineal. Es de esperarse que con interpolaciones de mayor grado se obtenga un
mejor resultado. En la siguiente figura podemos observar un posible resultado de ambos
convertidores.
Fig. 8 (a) Convertidor de orden cero, (b) Convertidor de primer orden

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
24
En general las técnicas de interpolación subóptimas resultan en el paso de
frecuencias por encima de la frecuencia de plegado. Tales componentes de frecuencia
son indeseables y deben ser eliminadas pasando la salida del interpolador a través de un
filtrado analógico adecuado, que se conoce como postfiltro o filtro suavizante.
222...222 SSSEEEÑÑÑAAALLLEEESSS YYY SSSIIISSSTTTEEEMMMAAASSS DDDIIISSSCCCRRREEETTTOOOSSS
2.2.1 Señales en tiempo discreto
Una señal en tiempo discreto x(n) es una función de una variable independiente
entera. Gráficamente, se representa como en la siguiente figura.
Es importante destacar que una señal en tiempo discreto no está definida para
instantes entre dos muestras sucesivas; por tal motivo es incorrecto pensar que x(n) es
igual a cero si n no es un entero. Simplemente, la señal x(n) no está definida para
valores no enteros de n. Para los apartados siguientes supondremos que una señal en
tiempo discreto se define para cada valor entero n para - ∞ < n < ∞.
Fig. 9 Ejemplo de una señal discreta
... ...
1.9
-1.45
11.45
-1.9
1.64
-0.6
-1.2
n

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
25
para n = 0
para n ≠≠ 0
para n ≥≥ 0
para n < 0
2.2.1.1 Señales elementales en tiempo discreto
En el estudio de sistemas y señales discretas en el tiempo existen varias señales
básicas que aparecen con frecuencia y juegan un papel importante en su estudio. En las
siguientes líneas hacemos un resumen de estas.
Señal impulso unitario
Se denomina δ(n) y se define como
=,0
,1)(nδ ec. 2.11
En otras palabras, el impulso unitario es una señal que vale cero siempre, excepto para
n = 0 donde vale 1. La representación gráfica de δ(n) se muestra en la figura 10.
Señal escalón unidad
Se denota como u(n) y se define como:
=,0
,1)(nu ec. 2.12
La figura 11 ilustra la señal escalón unidad.
Fig. 10 Ejemplo de una señal impulso unitario
... ...
1
n0 1 2 3 4 5 6-6 -5 -4 -3 -2 -1

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
26
para n ≥≥ 0
para n < 0
Señal rampa unidad
Esta señal se denota como ur(n) y se define como:
==,0
,n)n(u ec. 2.13
La señal la podemos observar en la figura 12.
Señales senoidales en tiempo discreto
Una señal senoidal en tiempo discreto puede expresarse como:
∞<<−∞+= t),tncos(A)n(x ω ec. 2.14
donde n es una variable entera, denominada número de muestra, A es la amplitud de la
sinusoide, ω es la frecuencia en radianes por muestra, y θ es la fase en radianes.
Fig. 11 Ejemplo de una secuencia escalón unitario
...
1
n
...0 1 2 3 4 5 6-6 -5 -4 -3 -2 -1
...1
n
...0 1 2 3 4 5 6-6 -5 -4 -3 -2 -1
23
45
6
Fig. 12 Ejemplo de una secuencia rampa unitaria

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
27
Si en lugar de ω, utilizamos la variable de frecuencia f definida por
fπω 2≡ ec. 2.15
la relación se convierte en:
∞<<−∞+= t),tfncos(A)n(x π2 ec. 2.16
La frecuencia f tiene dimensiones de ciclos por muestra. Al considerar el
muestreo de senoidales analógicas, relacionamos la variable de frecuencia f de una
senoidal en tiempo discreto con la frecuencia F en ciclos por segundo de la senoidal
analógica.
Las señales senoidales en tiempo discreto se caracterizan por las siguientes
propiedades:
• Una senoidal en tiempo discreto es periódica sólo si su frecuencia f es un número
racional. Por definición, una señal en tiempo discreto es x(n) es periódica con
periodo N(N>0) si y sólo si
)n(x)Nn(x =+ para todo n ec.2.17
El valor más pequeño de N para el que se cumple la ecuación anterior se
denomina periodo fundamental.
Fig. 13 Ejemplo de señal senoidal discreta (ωω = ππ/6 y θθ =ππ/3 )

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
28
• Las senoidales en tiempo discreto cuyas frecuencias están separadas por un múltiplo
entero de 2π, son idénticas.
• La mayor tasa de oscilación en una sinusoide en tiempo discreto se alcanza cuando
ω = π ( o ω = -π) o, equivalentemente, f = ½ (o f = -½) .
Estos se debe principalmente, a que como sabemos de antemano, las señales
senoidales múltiplos de 2π son idénticas; se deduce que las frecuencias en cualquier
intervalo πωωω 211 +≤≤ constituyen todas las senoidales o exponenciales
complejas en tiempo discreto. Por tanto, el rango de frecuencias para senoidales en
tiempo discreto es finito con duración de 2π. Habitualmente, se elige le rango
πω 20 ≤≤ ó πωπ ≤≤− ( 10 ≤≤ f , 21
21 ≤≤− f ), que denominamos rango
fundamental.
Señales exponenciales en tiempo discreto
La señal exponencial en tiempo discreto es una secuencia de la forma:
x(n) = an ec. 2.18
si el parámetro a es real, entonces x(n) es real. La siguiente figura muestra una señal
exponencial discreta para a = 0.7.
0 5 10 150
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
n
Fig. 14 Ejemplo de una secuencia exponencial

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
29
Cuando a es complejo este puede escribirse como:
a ≡≡ re jθθ ec. 2.19
donde r y θ son ahora los parámetros; de manera que podemos escribir la secuenciacomo:
x(n) = r n e jθθn = r n ( cosθθn + jsenθθn) ec. 2.20
Dado que x(n) es ahora complejo esta se puede representar gráficamente
dibujando su parte real e imaginaria, en función de n, separadamente según las siguientes
ecuaciones.
xR(n) = r n cosθθn ec. 2.21
xI(n) = r n senθθn ec. 2.22
donde xR(n) representa la parte real y xI(n) la parte imaginaria de x(n).
Alternativamente, la señal x(n) dada por la ec. 2. 20 se puede representar
gráficamente mediante su amplitud y su fase según las siguientes relaciones.
x(n) = A(n) = rn ec. 2. 23
∠∠ x(n) = φφ(n) = θθn ec. 2. 24
2.2.1.2 Clasificación de señales en tiempo discreto
Generalmente los métodos empleados en el análisis de los sistemas discretos
dependen de las características de las señales. Por tal motivo daremos una breve
explicación a las clasificaciones más utilizadas para el estudio de señales discretas.
Señales de energía y señales de potencia
La energía de una señal se define como:

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
30
∑∑∞∞
−∞−∞==
==n
2)n(xE ec. 2.25
Esta definición se aplica tanto a señales reales como a señales complejas. La
energía de una señal puede ser finita o infinita. Si E es finita entonces se dice que x(n) es
una señal de energía. Es común agregar un subíndice x a E para denotar que es la
energía de la señal x(n).
Muchas de las señales que poseen energía infinita tienen potencia media finita.
La potencia media de una señal discreta en el tiempo x(n) se define como
∑∑−−==∞∞→→ ++
==N
Nn
2
N)n(x
1N21
limP ec. 2.26
definiendo la energía de la señal para un intervalo finito de –N ≤ n ≤ N como
∑∑−−==
≡≡N
Nn
2
N )n(xE ec. 2.27
de forma tal que podemos expresar la energía de la forma
NN
ElimE∞∞→→
≡≡ ec. 2.28
y la potencia media de la señal como
NN
E1N2
1limP
++≡≡
∞∞→→ec. 2.29

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
31
Podemos observar que si E es finita P = 0 ; sin embargo E es infinita la potencia
puede ser tanto finita como infinita. Si la P es finita y distinta de cero la señal se
denomina como señal de potencia.
Señales periódicas y aperiódicas
Una señal x(n) es periódica con periodo N (N > 0) si y sólo si
x(n+N) = x(n) para todo N ec. 2.30
El valor más pequeño de N para el que esta ecuación es cierta se denomina
periodo fundamental. Si esta ecuación no se verifica para ningún valor de N se
denomina aperiódica.
Señales simétricas (pares) y antisimétricas (impares)
Una señal real x(n) se considera simétrica (par) si:
x(-n) = x(n) ec. 2.31
Por otra parte una señal se considera antisimétrica (impar) si:
x(-n) = - x(n) ec. 2.32
En la figura mostrada a continuación podemos ver un ejemplo de señales
simétricas y antisimétricas.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
32
2.2.1.3 Operaciones simples de señales en tiempo discreto
A continuación enunciaremos algunas de las operaciones sencillas comunes al
analizar sistemas discretos.
Transformación de la variable independiente
Entre las modificaciones más importantes a la variable independiente tiempo
tenemos:
• Una señal x(n) puede ser desplazada en el tiempo reemplazando la variable
independiente n por n – k , donde k es un entero. Si k es un entero positivo, el
desplazamiento temporal resulta un retraso en la señal en k unidades de
tiempo; si k es un entero negativo el desplazamiento temporal resulta en un
adelanto de la señal en |k| unidades de tiempo.
• Se puede reemplazar la variable n por –n, obteniendo como resultado la
reflexión de la señal con respecto al origen de tiempos (n = 0). Es importante
Fig. 15 a) Señal simétrica(par); b) señal antisimétrica(impar)

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
33
destacar que las operaciones de reflexión y retardo temporal no son
conmutativas.
• Se puede reemplazar n por µn, siendo µ un entero; esto producirá un
escalamiento en el tiempo. Esta condición se conoce con el nombre de
escalado temporal o submuestreo.
Suma, multiplicación y escalado de secuencias.
Dentro de las modificaciones a la amplitud de la señal en el tiempo, las más
importantes relaciones son:
• El escalado en amplitud de una señal por una constante A se obtiene
multiplicando el valor de cada muestra de la señal por A.
• La suma de dos señales x1(n) y x2(n) es una señal y(n) cuyo valor en cada
instante es igual a la suma de los valores en ese instante de las dos señales
originales.
• El producto de dos señales x1(n) y x2(n) es una señal y(n) cuyo valor en cada
instante es igual al producto de los valores en ese instante de las dos señales
originales.
2.2.2 Sistemas en tiempo discreto
Se conocen como sistemas discretos a aquellos elementos o conjunto de ellos que
son diseñados para procesar las señales de carácter digital. Estos elementos pueden ser
del tipo software y/o hardware.
Generalmente se considera un sistema discreto como una operación o conjunto de
operaciones que se realizan sobre la señal de entrada x(n) para producir la señal de salida
y(n). Diremos que la señal x(n) es transformada por el sistema en y(n), y expresamos la
relación general de x(n) e y(n) como:
[[ ]])n(x)n(y τ≡≡ ec. 2.33

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
34
donde el símbolo τ denota la transformación o procesado realizado por el sistema sobre
la señal x(n) para producir y(n).
Los sistemas tienen ciertas propiedades particulares que permiten su clasificación
interna. Esto facilita el estudio debido al tipo de procesamiento que pueden efectuar y
cómo afectará éste a la señal de entrada al sistema. A continuación damos una breve
descripción de esta clasificación de los sistemas.
2.2.2.1 Clasificación de sistemas discretos
Para el diseño y análisis de sistemas resulta conveniente clasificar éstos según sus
propiedades generales que cumplan. Es más las técnicas matemáticas desarrolladas para
el diseño y/o análisis de sistemas en tiempo discreto tienen dependencia con las
características generales de los sistemas.
Sistemas estáticos y sistemas dinámicos
Se considera un sistema como estático o sin memoria si su salida en cualquier
instante de tiempo n depende a lo sumo de la entrada en ese mismo instante de tiempo,
pero no de las muestras futuras ni pasadas. Para cualquier otro caso se considera al
sistema como dinámico o con memoria.
Si la salida del sistema en el instante n está determinada completamente por las
muestras de entrada en el intervalo n – N a n( N ≥ 0 ), se dice que el sistema tiene
memoria de duración N. Si N = 0 el sistema es estático. Si 0 < N < ∞, se dice que el
sistema tiene memoria finita, mientras que si N = ∞, se dice que el sistema tiene
memoria infinita.
Sistemas invariantes en el tiempo y sistemas variantes en el tiempo
Se puede subdivir la clase general de sistemas en dos grandes subgrupos: los
sistemas invariantes con el tiempo y los sistemas que varían con el tiempo. Básicamente

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
35
para lograr que los sistemas sean clasificados dentro de uno u otro grupo debe observarse
su comportamiento en relación con el siguiente teorema.
Teorema
Un sistema en reposo τ es invariante en el tiempo o invariante a desplazamiento si
y sólo si
)n(y)n(x →→== τec. 2.34
implica que
)kn(y)kn(x −−→→==−− τec. 2.35
para toda señal de x(n) y todo desplazamiento temporal k.
Si el sistema no cumple con esta condición se considera como sistema variante en
el tiempo.
Sistemas lineales y no lineales
Se considera como sistema lineal con aquel que cumpla con el principio de
superposición. Este principio exige que la respuesta del sistema a una suma ponderadas
de señales sea igual a la correspondiente suma ponderada de las salidas a cada una de las
señales de entrada.
Teorema
Un sistema es lineal si y sólo si
[[ ]] [[ ]] [[ ]])n(xa)n(xa)n(xa)n(xa 22112211 τττ ++==++ ec. 2.36
para cualquier secuencia arbitraria de entrada x1(n) y x2(n), y cualquier constante
arbitrarias a1 y a2.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
36
Si algún sistema no cumple con esta condición se considera como sistema no
lineal.
Sistemas causales y no causales
Se considera un sistema causal en base al siguiente teorema.
Teorema
Se dice que un sistema es causal si la salida del sistema en cualquier instante n
(es decir, y(n) ) depende sólo de las entradas presentes y pasadas (es decir, x(n),
x(n - 1), x(n - 2), ...) pero no de las futuras ( es decir, x(n + 1), x(n + 2), ...). En
términos matemáticos la salida de un sistema causal debe cumplir con la forma:
y(n) = F [x(n), x(n – 1), x(n –2), ...] ec. 2. 37
donde F es una función arbitraria.
Si un sistema no satisface con esta condición se considera como un sistema no
causal. En un sistema de este tipo, la salida depende no sólo de las entradas presentes y
pasadas sino también de las futuras. Se observa que físicamente es imposible utilizar
este tipo de sistemas para el procesamiento de la señal en tiempo real, debido a su
dependencia con las muestras futuras.
Sistemas estables e inestables
La estabilidad es una propiedad muy importante que debe ser considerada en
cualquier aplicación práctica de un sistema. Los sistemas inestables presentan un
comportamiento errático y extremo que es causa de desbordamiento del sistema en
aplicaciones prácticas. Se utiliza el siguiente teorema para determinar si el sistema es
estable o inestable.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
37
Teorema
Un sistema arbitrario en reposo se dice de entrada acotada – salida acotada
(BIBO, bounded input-bounded output), si y sólo si toda la entrada acotada
produce una salida acotada.
Matemáticamente podemos ver el acotamiento de las secuencias de entrada y
salida, x(n) e y(n), como la existencia de un par de números finitos, digamos Mx y My,
tales que:
|x(n)| ≤≤ Mx <∞∞ y |y(n)| ≤≤ My <∞∞ ec. 2.38
para todo n. Si para alguna entrada acotada x(n) la salida no está acotada (es infinita), el
sistema se califica como inestable.
2.2.2.2 Técnicas para el análisis de sistemas lineales
El estudio de los sistemas lineales e invariantes en el tiempo es de vital
importancia para el tratamiento de la señal ya que básicamente cualquier sistema puede
emularse bajo estas características; siendo su análisis de fácil comprensión y muy bien
explorado. Esto no quiere decir que nunca nos toparemos con sistemas que no
respondan a estas características, sin embargo los sistemas utilizados para este trabajo son
de este tipo.
Existen dos métodos básicos para el análisis de sistemas del comportamiento
respuesta de un sistema lineal a una determinada señal de entrada. Uno de estos métodos
se basa en obtener la solución de las ecuaciones de diferencias que relacionan la entrada
con la salida del sistema. Generalmente esta ecuación tiene la forma:
y(n) = F[ y(n –1), y(n –2),........, y(n –N), x(n –1), ............., x(n –M)] ec. 2.39

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
38
donde F[...] representa cualquier función de las cantidades entre corchetes. Por lo
general los sistemas LTI responden a la ecuación de entrada - salida dada por:
∑∑∑∑====
−−++−−−−==M
1kk
N
1kk )kn(xb)kn(ya)n(y ec. 2.40
donde ak y bk son parámetros constantes que especifican el sistema y son independientes
de x(n) e y(n).
El otro método de análisis del comportamiento de un sistema lineal ante una
determinada entrada se basa en descomponer dicha señal de entrada en señales
elementales. Las señales elementales se escogen de manera tal que sea fácil determinar
la respuesta del sistema a cada una de ellas. Utilizando la propiedad de linealidad del
sistema, se suman las respuestas del sistema a la señal de entrada global.
Básicamente la señal de entrada x(n) se expresa como una suma ponderada de
señales elementales ( xk(n) ) de manera que:
∑∑==k
kk )n(xc)n(x ec. 2. 41
donde los ck definen el conjunto de amplitudes (coeficientes de ponderación) de la
descomposición de la señal x(n). Suponiendo ahora que la respuesta del sistema a la
señal elemental xk(n) es yk(n). Entonces:
yk(n) ≡≡ ττ[ xk(n)] ec. 2.42
suponiendo que el sistema está en reposo y que la respuesta a ckxk(n) es ckyk(n), como
consecuencia de la propiedad de escalado de un sistema lineal. Finalmente la respuesta a
la entrada x(n) queda determinada por:

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
39
∑∑==k
kk )n(yc)n(y ec. 2.43
utilizando la propiedad aditiva de los sistemas lineales.
El análisis de ambos métodos es fundamental para la comprensión de los métodos
de diseño de los filtros, por tal motivo en las siguientes secciones daremos un análisis un
poco más detallada de ambos.
2.2.3 Análisis de sistemas lineales por el método de la convolución
Como vimos en la sección anterior los sistemas lineales invariantes en el tiempo
se pueden analizar por dos métodos diferentes. En esta sección nos dedicaremos a
comentar las principales características del segundo método mencionado en la sección
anterior, basado en la descomposición de la señal de entrada en señales elementales para
observar la respuesta del sistema.
En este método prevalece la descomposición de la señal de entrada en una suma
ponderada de impulsos unitarios. Para realizar esto debemos determinar en primer lugar
la respuesta del sistema a un impulso unitario y a continuación usar las propiedades de
escalado y aditiva de un sistema lineal para determinar la fórmula de la señal de salida a
una entrada arbitraria.
A continuación describimos este proceso y la utilización de la convolución como
herramienta matemática del análisis. A la vez aprovechamos para enunciar algunas de
las propiedades más relevantes de la convolución que nos ayudarán en el desarrollo de
sistemas.
2.2.2.1 Descomposición de una señal discreta en impulsos unitarios
Si deseamos expresar una señal x(n) como la suma ponderada de impulsos
unitarios, debemos cumplir con ciertas normas que detallamos a continuación.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
40
• Definimos las señales elementales xk(n) como:
xk(n) = δδ (n – k) ec. 2.44
donde k representa el retraso del impulso unitario. Para poder manejar una señal
arbitraria x(n) que puede tener infinitos valores, el conjunto de impulsos unitarios
debe ser también infinito, para poder contener el número infinito de
desplazamientos.
• Luego multiplicamos x(n) por δ (n – k). Debido a las propiedades del impulso
unitario esto nos da por resultado una secuencia en que todos los valores son
cero excepto en n = k donde vale x(k). Por tanto:
x(n) δδ (n – k) = x(k) δδ (n – k) ec. 2.45
es una secuencia que se anula en todos los puntos excepto en n = k.
• Realizamos el procedimiento anterior para valores de k comprendidos entre
-∞ < k < ∞, de manera que cada impulso unitario extraiga los valores de la
secuencia x(n) y los almacene independientemente en señales xk(n).
• Luego por medio de una suma ponderada de estas señales, como se muestra en
la ec. 2.46, podemos obtener la señal original igual a la secuencia x(n).
∑∑∞∞
−∞−∞==
−−==k
)kn()k(x)n(x δ ec. 2.46
2.2.2.2 Respuesta de un sistema LTI a entradas arbitrarias (la convolución)
Si denotamos la respuesta del sistema y(n. k) a un impulso unitario en el instante
n = k mediante el símbolo h(n, k), - ∞ < k < ∞; de forma que:
)]Kn([)k,n(h)k,n(y −−==≡≡ δτ ec. 2.47

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
41
donde n es el índice temporal y k indica la posición del impulso unitario. Si la entrada del
impulso unitario se escala en cierta cantidad ck ≡ x(k), la entrada x(n) expresada como un
suma ponderada también estará escalada, como se muestra:
∑∑∞∞
−∞−∞==
−−==k
)kn()k(x)n(x δ ec. 2.48
Finalmente la respuesta del sistema queda determinada por una suma ponderada
de las respuestas de los impulsos, como se muestra:
[[ ]] ∑∑∞∞
−∞−∞==
−−====k
)]kn([)k(x)n(x)n(y δττ ec. 2.49
es importante saber que como sólo se aplico la propiedad de linealidad este resultado
también es valida para sistemas que varían con el tiempo. Pero si el sistema es además
invariante en el tiempo esta respuesta queda reducida a:
∑∑∞∞
−∞−∞==
−−==k
)kn(h)k(x)n(y ec. 2.50
De esta forma conocemos que para un sistema LTI su respuesta queda totalmente
definida por la función h(n), es decir su respuesta al impulso unitario. A la ec. 2.50 se le
conoce con el nombre de convolución.
2.2.2.3 Propiedades de la convolución
En esta sección se estudian algunas propiedades importantes de esta operación;
que como sabemos de antemano, es una de las herramientas utilizadas para conocer la
respuesta de un sistema a una determinada entrada.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
42
Para simplificar la notación denotaremos la operación de la convolución mediante
una asterisco; de esta manera tenemos que:
∑∑∞∞
−∞−∞==
−−≡≡==k
)kn(h)k(x)n(h*)n(x)n(y ec. 2.51
según esta notación, la secuencia que sigue al asterisco (en este caso la respuesta al
impulso h(n)), es la que se refleja y desplaza.
Ley conmutativa
Esta responde a la siguiente ecuación:
x(n)*h(n) = h(n)*x(n) ec. 2.52
Ley asociativa
Esta responde a la siguiente ecuación:
[x(n)*h1(n)]* h2(n) = x(n)*[h1(n)* h2(n)] ec. 2.53
Propiedad distributiva
Esta responde a la siguiente ecuación:
x(n)*[h1(n) + h2(n)] = x(n)*h1(n) + x(n)* h2(n) ec. 2.54
2.2.2.4 Sistemas con respuestas impusional de duración finita e infinita
Hasta este momento hemos visto los sistemas lineales e invariantes en el tiempo
por medio de su respuesta al impulso h(n). Sin embargo, resulta provechoso realizar una

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
43
clasificación más objetiva acerca de cómo se da esta respuesta del sistema; en términos
de que si la misma presenta una respuesta finita o infinita al impulso unitario.
De esta manera si el sistema tiene una respuesta al impulso de duración finita se
les conoce como sistemas FIR (finite duration impulse response). Centraremos nuestro
estudio a sistemas causales tales que:
h(n) = 0 n<0 y n ≥≥ M ec. 2.55
de esta manera la convolución para este tipo de sistemas queda determinada por:
∑∑−−
==
−−==1M
0k
)kn(x)k(h)n(y ec. 2.56
Esta expresión nos indica que la salida en cualquier instante n se obtiene como la
suma ponderada de las siguientes muestras de la señal de entrada: x(n), x(n – 1), ..... ,
x(n – M + 1).
Un sistema lineal invariante en el tiempo que tiene una respuesta al impulso de
duración infinita es conocido como sistema IIR (infinite-duration impulse response). Su
salida, según la convolución, responde a la siguiente ecuación:
∑∑∞∞
==
−−==0k
)kn(x)k(h)n(y ec. 2.57
donde se ha supuesto causalidad, aunque no es necesario. En este caso la salida del
sistema consiste en la combinación lineal ponderada (por la respuesta impulsional h(k) )
de las muestras de la señal de entrada, x(n), x(n-1), x(n-2), ... . Dado que esta suma
ponderada tiene la muestra presente y todas las pasada de la señal de entrada, decimos
que el sistema tiene memoria infinita.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
44
2.2.4 Análisis de sistemas discretos descritos mediante ecuaciones de diferencias
Pudimos ver en la sección anterior como queda caracterizado la relación entrada –
salida del sistema a partir de la convolución de la respuesta al impulso unitario del
sistema con la entrada. Sin embargo, observamos que para los sistemas del tipo IIR esta
respuesta era de duración infinita, por lo cual su realización a través de este método se
hacia irrealizable.
Sin embargo existe una manera práctica y eficiente para la realización de sistemas
IIR. Esta proceso se basa en la implementación del sistema a través de la relación de
entrada y salida descrita mediante su ecuación de diferencias.
En forma general el método de la convolución expresaba la relación entrada -
salida sólo en términos de la señal de entrada; sin embargo, esto no es estrictamente
necesario. A veces resulta conveniente el expresar el sistema no sólo en términos de los
valores presentes y pasados de la señal de entrada, sino también en función de los valores
pasados de la señal de salida.
Con ésto en mente podemos clasificar a los sistemas discretos en dos nuevos
grupos. Si un sistema cuya salida en el instante n depende de los valores anteriores de la
misma y( n - 1), y( n - 2), ... se denomina sistema recursivo. Si por el contrario el
sistema sólo depende de los valores presentes de la entrada el mismo se denomina como
sistema no recursivo. Al ser dependiente los sistemas de las salidas pasadas (recursivos)
permite un nuevo desarrollo de sistemas en función de su ecuación de diferencias, como
veremos más adelante.
A continuación damos una descripción de los parámetros más relevantes para
llevar a cabo este tipo de análisis al sistema.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
45
2.2.4.1 Sistemas LTI descritos por ecuaciones en diferencias con coeficientes
constantes
De ahora en adelante nos enfocaremos en la familias de sistemas LTI que pueden
ser descritos por una relación de entrada – salida denominada ecuación de diferencias de
coeficientes constantes; los cuales son un subgrupo de los sistemas recursivos y no
recursivos.
De manera general los sistemas de este tipo se pueden describir por la ecuación:
∑∑∑∑====
−−++−−−−==M
0kk
N
1kk )kn(xb)kn(ya)n(y ec. 2.56
donde el entero N recibe el nombre de orden de la ecuación en diferencias u orden del
sistema. El signo negativo del primer termino de la derecha de la ecuación se incluye
por conveniencia para permitirnos expresar la ecuación en diferencias sin ningún signo
negativo.
Se puede observar que la salida del sistema en el instante n esta en función de la
suma de las salidas pasadas y(n - 1), y(n - 2), ... , y(n – N) así como de muestras de
entrada presentes y pasadas. De esta forma para determinar y(n) para n ≥ 0, necesitamos
la entrada x(n) para todo n ≥ 0, y las condiciones iniciales y(-1), y(-2), ... , y(-N). Por tal
motivo las condiciones iniciales resumen todo lo que necesitamos saber sobre la historia
pasada de la respuesta del sistema para calcular las salidas presentes y futuras.
Es bueno mencionar algunas de las propiedades que rigen este tipo de sistemas de
manera que faciliten nuestro análisis para este tipo de sistemas. Entre estas propiedades
tenemos:
• Un sistema recursivo descrito por una ecuación en diferencias lineal de
coeficientes constantes es lineal e invariante en el tiempo.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
46
• Los sistemas descritos mediante ecuaciones de diferencias lineal de
coeficientes constantes será estable si y sólo si para toda entrada acotada y
toda condición inicial acotada la respuesta total del sistema está acotada.
2.2.4.1 Solución de ecuaciones en diferencias con coeficientes constantes
Nuestro objetivo ahora es poder desarrollar la ecuación de diferencias del sistema
a manera de obtener el resultado de la relación de entrada – salida que nos permita
desarrollar el sistema por estructuras físicas o vía software. Por tal motivo debemos
determinar la salida del sistema y(n), n ≥ 0, para una determinada x(n), n ≥ 0 y un
conjunto de condiciones iniciales.
Existen dos métodos para lograr este desarrollo. Uno se basa en el empleo de la
transformada z como herramienta para obtener la solución de la ecuación de diferencias.
A este se le conoce como método indirecto, y su desarrollo lo abarcaremos cuando
estudiemos las propiedades de la transformada z.
El método directo hace uso de las relaciones matemáticas conocidas para el
desarrollo convencional de solución de ecuaciones de diferencias de un sistema. La
solución dada por este método supone que la solución total es la suma de dos partes:
y(n) = yh(n) + yp(n) ec. 2.57
La parte yh(n) se conoce como solución homogénea o complementaria, mientras
que yp(n) se le denomina solución particular.
Solución homogénea
Para obtener la solución homogénea del sistema suponemos primero que x(n) = 0,
lo cual nos da por resultado la ecuación en diferencias homogénea, dada por:

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
47
0)kn(yaN
0kk ==−−∑∑
==
ec. 2.58
para la cual suponemos una solución exponencial de la forma:
yh(n) = λλn ec. 2.59
donde el subíndice h de y(n) denota que corresponde a la solución homogénea de la
ecuación en diferencias. Luego sustituimos está solución en la ec. 2.58 de manera que:
0aN
0k
knk ==∑∑
==
−−λ ec. 2.60
o
0)aa...aa( N1N2N
21N
1NNn ==++++++++++++ −−
−−−−−− λλλλλ ec. 2.61
El polinomio entre paréntesis se le denomina polinomio característico del
sistema; que en general tiene N raíces que denotamos por λ1, λ2, ... , λN . De esta forma
la solución más general a la ecuación de diferencias homogénea es:
nNN
n212
n11h C...CC)n(y λλλ ++++++== ec. 2.62
donde C1, C2, ... , CN son coeficientes de ponderación; estos se determinan a partir de las
condiciones iniciales especificadas para el sistema.
Solución particular
Para desarrollar la solución particular de la ecuación en diferencias se debe
especificar la entrada para x(n), n ≥ 0 ; por lo tanto la yp(n) es cualquier solución que
satisfaga a:
∑∑∑∑====
−−==−−M
0kk
N
0kpk )kn(xb)kn(ya a0 = 1 ec. 2.58

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
48
Para resolver esta ecuación suponemos yp(n) tiene una forma que depende de la
forma de la entrada x(n).
Solución total a la ecuación en diferencias
Debido a la propiedad de linealidad de las ecuaciones en diferencia con
coeficientes constantes podemos sumar las soluciones homogénea y particular para
obtener la solución total, de forma que:
y(n) = yh(n) + yp(n) ec. 2.57
La suma resultante y(n) contiene los parámetros constantes Ci incluidos en la
solución homogénea yh(n). Estas condiciones pueden determinarse para cumplir con las
condiciones iniciales.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
49
222...333 LLLAAA TTTRRRAAANNNSSSFFFOOORRRMMMAAADDDAAA ZZZ
Similar al caso de la transformada de Laplace, la transformada z es una
herramienta que nos facilita de gran manera la manipulación de los sistemas discretos
cuando éstos son caracterizados por su relación de entrada y salida utilizando ecuaciones
en diferencia. La transformada z, como veremos más adelante nos permitirá de una
manera más simplificada, expresar las relaciones de entrada y salida del sistema. Sus
propiedades nos ayudarán a conocer aspectos relevantes del sistema como la estabilidad y
relaciones de entrada – salida.
Cabe destacar que no pensamos hacer un tratado explicativo de cada aspecto de la
transformada z; sino enunciar las propiedades más importantes de la misma. De esta
forma tendremos a mano las herramientas que faciliten nuestra labor.
2.3.1 Definición
Se conoce como transformada z de una señal discreta x(n) como la serie de
potencia:
∑∑∞∞
−∞−∞==
−−≡≡n
nz)n(x)z(X ec. 2.58
donde z es una variable compleja. Esta relación se denomina como transformada z
directa porque transforma una señal en el dominio del tiempo x(n) en la señal compleja
X(z). El procedimiento inverso, es decir, el que obtiene x(n) a partir de X(z), se
denomina transformada z inversa.
La transformada z de una función se denota por:
X(z) ≡≡ Z x(n) ec. 2.59

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
50
Mientras que la relación entre x(n) y X(z) se indica mediante:
)z(X)n(xz
↔↔ ec. 2.60
Dado que la transformada z es una serie infinita de potencias, ésta existe sólo para
aquellos valores para los que la serie converge. La región de convergencia (ROC) de
X(z) es el conjunto de todos los valores de z para los cuales X(z) es finita.
Matemáticamente hablando la transformada z es simplemente una forma
alternativa de representar una señal. Observaremos que el coeficiente de z-n, para una
transformada determinada, es el valor de la señal en el instante n.
Si expresamos la variable compleja z en su forma polar, como:
z = r e jθθ ec. 2.61
donde r =| z| y θ =∠ z. De esta forma queda determinada X(z) como:
∑∑∞∞
−∞−∞==
−−−−==
≡≡n
njn
rezer)n(x|)z(X j
θθ ec. 2.62
tenemos que para la ROC de X(z), | X(z)| < ∞. Sin embargo
∑∑∑∑∞∞
−∞−∞==
−−∞∞
−∞−∞==
−−−− ==≡≡n
n
n
njn r)n(xer)n(x)z(X θ ec. 2.63
por tal motivo |X(z)| debe ser finita si la secuencia x(n)r -n es absolutamente sumable.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
51
2.3.2 Propiedades de la transformada z
Los estudios de los sistemas discretos a través de la transformada z se pueden
facilitar de gran manera si se aplican muchas propiedades de ella. Entre estas
propiedades de la transformada z podemos desatacar las siguientes.
Linealidad
Si
)z(X)n(x 1z
1 →→←← ec. 2.64
y
)z(X)n(x 2z
2 →→←← ec. 2.65
entonces
)z(Xa)z(Xa)z(X)n(xa)n(xa)n(x 2211z
2211 ++==→→←←++== ec. 2.66
para cualesquiera constantes a1 y a2. La propiedad de la linealidad se puede generalizar
a un número arbitrario de señales.
Desplazamiento en el tiempo
Si
)z(X)n(x z→→←← ec. 2.67
entonces
)z(Xz)kn(x kz −−→→←←−− ec. 2.68
La ROC de z-k X(z) es la misma que la de X(z), excepto por z = 0, si k > 0, y
z = ∞, si k < 0.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
52
Las propiedades de linealidad y desplazamiento en el tiempo son las
características claves que hacen que la transformada z sea extremadamente útil para el
análisis de sistemas discretos LTI.
Escalado en el domino de z
Si
)z(X)n(x z→→←← ROC: r1 < |z| < r2 ec. 2.69
entonces
)za(X)n(xa 1zn −−→→←← ROC: |a|r1 < |z| < |a|r2 ec. 2.70
para cualquier valor constante a, real o compleja.
Inversión temporal
Si
)z(X)n(x z→→←← ROC: r1 < |z| < r2 ec. 2.71
entonces
)z(X)n(x 1z −−→→←←−− ROC: | 1 / r2| < |z| < | 1 / r1| ec. 2.72
Diferenciación en el dominio z
Si
)z(X)n(x z→→←← ec. 2.73
entonces
dz)z(dX
z)n(nx z −−→→←← ec. 2.74

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
53
Convolución de dos secuencias
Si
)z(X)n(x 1z
1 →→←← ec. 2.75
)z(X)n(x 2z
2 →→←← ec. 2.76
entonces
)z(X*)z(X)z(X)n(x*)n(x)n(x 21z
21 ==→→←←== ec. 2.77
La ROC de X(z) es, cuando menos, la intersección de las X1(z) y X2(z).
Esta propiedad es una de las más relevantes de la transformada z, ya que convierte
la convolución de dos señales (en el dominio del tiempo) en la multiplicación de sus
transformadas.
Correlación de dos secuencias
Si
)z(X)n(x 1z
1 →→←← ec. 2.78
)z(X)n(x 2z
2 →→←← ec. 2.79
entonces
)z(X)z(X)z(R)ln(x)n(x)l(r 121xx
z
n21xx 2121
−−∞∞
−∞−∞==
==→→←←−−== ∑∑ ec. 2.80
Multiplicación de dos secuencias
Si
)z(X)n(x 1z
1 →→←← ec. 2.81
)z(X)n(x z22 →← ec. 2.82
entonces
dvv)vz
(X)v(Xj2
1)z(X)n(x)n(x)n(x
C
121
z21 ∫∫ −−==→→←←==
πec. 2.83

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
54
donde C es un contorno cerrado que encierra al origen y se encuentra en la región de
convergencia común a X1(v) y X2(1/v).
Relación de Parseval
Si x1(n) y x2(n) son dos secuencias complejas, entonces
dvv)v
z(X)v(X
j21
)n(x)n(xC
1*
*21
n
*21 ∫∫∑∑ −−
∞∞
−∞−∞==
==π
ec. 2.84
siempre que r1l r2l < 1 < r1u r2u, donde r1l < |z| < r1u, y r2l < |z| < r2u, son las ROC de
X1(z) y X2(z).
El teorema del valor inicial
Si x(n) es causal entonces:
)z(Xlim)0(xz ∞∞→→
== ec. 2.86
2.3.3 Funciones de transferencia en el dominio de z
Como es conocido, en el mundo análogo, conocemos como función de
transferencia la relación entre la salida y la entrada en el domino de Laplace (s). De
manera similar podemos encontrar una relación de salida entrada para los sistemas
digitales, pero esta vez utilizaremos como herramienta de expresión la transformada z.
Las características de la relación de salida entrada en el dominio de z
generalmente nos brindan una información fiable y de gran trascendencia para el diseño,
y análisis de estos sistemas. Estas relaciones racionales y sus diversas características
serán tratadas a continuación.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
55
Polos y ceros
Son considerados como ceros a aquellos valores para los cuales X(z), la
transformada z de x(n), es cero. Se conocen como polos de la transformada z X(z) a
aquellos valores donde X(z) = ∞. Si X(z) es una función racional, tenemos que:
∑∑
∑∑
==
−−
==
−−
−−−−
−−−−
==++++++++++++
====N
0k
kk
M
0k
kk
NN
110
MM
110
za
zb
za...zaa
zb...zbb
)z(D)z(N
)z(X ec. 2.87
Si los valores de a0 ≠ 0 y b0 ≠ 0 (para evitar la potencias negativas) y con la
manipulación de las variables podemos obtener:
∏∏
∏∏
==
==−−++−−
−−
−−==
−−−−−−−−−−−−
==N
1kk
M
1kk
MN
N21
M21NM
0
0
)pz(
)zz(Gz
)pz)...(pz)(pz(
)zz)...(zz)(zz(z
a
b)z(X ec. 2.88
donde G ≡ b0 / a0 ; de esta forma X(z) tiene M ceros en zk = z1, z2, ..., zM (raíces del
polinomio del numerador), N polo en pk = p1, p2, ..., pN (raíces del polinomio del
denominador), y |N – M| ceros (si N > M) o polos (si M > N) en el origen z = 0.
Estos polos y ceros puede representarse en un plano complejo, similar al plano s,
denominado plano z. Aquí se muestran la localización de los polos en el plano z por
cruces; y con círculos en el caso de que sean ceros.
Por lo tanto existe una relación entre el plano s y el plano z; en la cuál todos los
puntos del semiplano izquierdo del plano s (valores reales del plano son negativos) están
encerrados dentro de un circulo de radio unitario concéntrico en z = 0. Y todo punto en
el semiplano derecho del plano s estará fuera de dicho circulo de radio unitario.

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
56
Como es de esperar entonces un sistema será estable si y sólo si todos sus polos de
su función de transferencia se encuentran dentro del circulo de radio unitario concéntrico
en z = 0.
Como hemos visto la transformada z X(z) es una función compleja
z = Re(z) + j Im(z). El módulo de X(z), |X(z)|, es una función real y positiva de z. Dado
que z representa un punto del plano complejo, |X(z)| es una función bidimensional y
describe una superficie.
Es de gran relevancia hacer notar también que para una señal real y causal, un
polo (o un par de polos complejos conjugados) cerca del origen hace que decrezca más
rápido que una señal con un polo (o un par de polos complejos conjugados) más cerca de
la circunferencia unidad. Como podemos ver la colocación de los polos en relación con
referencia a la circunferencia unidad afectan al comportamiento de la señal en el tiempo.
Los ceros también afectan al comportamiento en el tiempo de las señales, pero no tan
fuertemente como los polos.
R = 1
Im(z)Im(s)
Re(s)Re(z)
Plano z Plano s
Fig. 16 Relación entre el plano s y el plano z

TTrraabbaajjoo ddee GGrraadduuaacciióónnFFrraanncciissccoo JJ.. GGaarrccííaa CCaassttiilllloo
CCaappííttuulloo IIII
57
Es importante destacar que todo lo dicho sobre señales causales se aplica también
a sistemas LTI causales debido a que la respuesta al impulso del sistema es una señal
causal.
Señal x(n) Transformada z, X(z) ROC
δ(n) 1 Todo z
u(n)1z1
1−−
|z| > 1
an u(n)1za1
1−−
|z| > |a|
nan u(n)2
1
)za(1az
1−
−
−
|z| > |a|
-an u(-n-1)1za1
az−
−
−
1 |z| < |a|
-nan u(-n-1)2
1
)za(1az
1−
−
−
|z| < |a|
(cos ω0n)u(n)2
01
01
21
1−−
−
+−−
zcosz
cosz
ωω |z| > 1
(sen ω0n)u(n)2
01
01
21 −−
−
+− zcosz
senz
ωω |z| > 1
(an cos ω0n)u(n)22
01
01
21
1−−
−
+−−
zacosaz
cosaz
ωω |z| > |a|
(an sen ω0n)u(n)22
01
01
21 −−
−
+− zacosaz
senaz
ωω |z| > |a|
Tabla 2. Resumen de algunas transformadas z importantes