Una nueva Metodolog´ıa para la Solucion de la´ Cinematica...
6
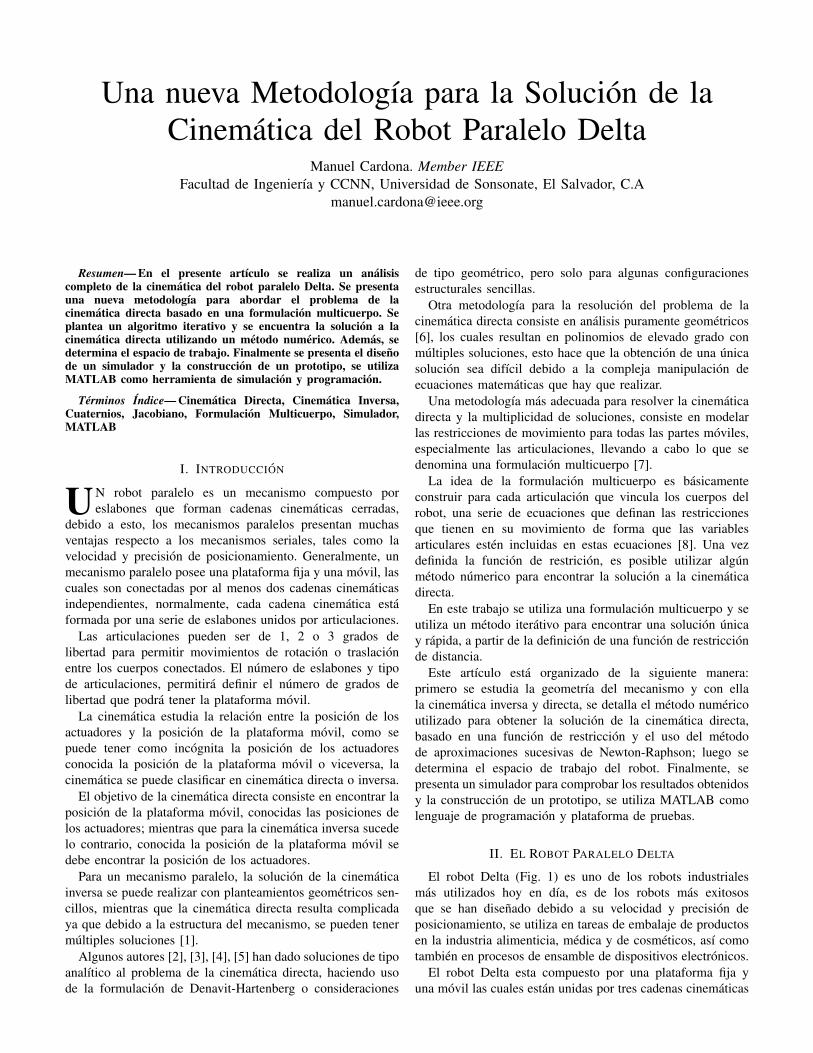
Una nueva Metodolog´ ıa para la Soluci´ on de la Cinem´ atica del Robot Paralelo Delta Manuel Cardona. Member IEEE Facultad de Ingenier´ ıa y CCNN, Universidad de Sonsonate, El Salvador, C.A [email protected] Resumen— En el presente art´ ıculo se realiza un an´ alisis completo de la cinem´ atica del robot paralelo Delta. Se presenta una nueva metodolog´ ıa para abordar el problema de la cinem´ atica directa basado en una formulaci´ on multicuerpo. Se plantea un algoritmo iterativo y se encuentra la soluci´ on a la cinem´ atica directa utilizando un m´ etodo num´ erico. Adem´ as, se determina el espacio de trabajo. Finalmente se presenta el dise ˜ no de un simulador y la construcci´ on de un prototipo, se utiliza MATLAB como herramienta de simulaci´ on y programaci´ on. T´ erminos ´ Indice— Cinem´ atica Directa, Cinem´ atica Inversa, Cuaternios, Jacobiano, Formulaci´ on Multicuerpo, Simulador, MATLAB I. I NTRODUCCI ´ ON U N robot paralelo es un mecanismo compuesto por eslabones que forman cadenas cinem´ aticas cerradas, debido a esto, los mecanismos paralelos presentan muchas ventajas respecto a los mecanismos seriales, tales como la velocidad y precisi´ on de posicionamiento. Generalmente, un mecanismo paralelo posee una plataforma fija y una m´ ovil, las cuales son conectadas por al menos dos cadenas cinem´ aticas independientes, normalmente, cada cadena cinem´ atica est´ a formada por una serie de eslabones unidos por articulaciones. Las articulaciones pueden ser de 1, 2 o 3 grados de libertad para permitir movimientos de rotaci´ on o traslaci´ on entre los cuerpos conectados. El n´ umero de eslabones y tipo de articulaciones, permitir´ a definir el n´ umero de grados de libertad que podr´ a tener la plataforma m´ ovil. La cinem´ atica estudia la relaci´ on entre la posici´ on de los actuadores y la posici´ on de la plataforma m´ ovil, como se puede tener como inc´ ognita la posici´ on de los actuadores conocida la posici´ on de la plataforma m´ ovil o viceversa, la cinem´ atica se puede clasificar en cinem´ atica directa o inversa. El objetivo de la cinem´ atica directa consiste en encontrar la posici´ on de la plataforma m´ ovil, conocidas las posiciones de los actuadores; mientras que para la cinem´ atica inversa sucede lo contrario, conocida la posici´ on de la plataforma m´ ovil se debe encontrar la posici´ on de los actuadores. Para un mecanismo paralelo, la soluci´ on de la cinem´ atica inversa se puede realizar con planteamientos geom´ etricos sen- cillos, mientras que la cinem´ atica directa resulta complicada ya que debido a la estructura del mecanismo, se pueden tener m´ ultiples soluciones [1]. Algunos autores [2], [3], [4], [5] han dado soluciones de tipo anal´ ıtico al problema de la cinem´ atica directa, haciendo uso de la formulaci´ on de Denavit-Hartenberg o consideraciones de tipo geom´ etrico, pero solo para algunas configuraciones estructurales sencillas. Otra metodolog´ ıa para la resoluci´ on del problema de la cinem´ atica directa consiste en an´ alisis puramente geom´ etricos [6], los cuales resultan en polinomios de elevado grado con m´ ultiples soluciones, esto hace que la obtenci´ on de una ´ unica soluci´ on sea dif´ ıcil debido a la compleja manipulaci´ on de ecuaciones matem´ aticas que hay que realizar. Una metodolog´ ıa m´ as adecuada para resolver la cinem´ atica directa y la multiplicidad de soluciones, consiste en modelar las restricciones de movimiento para todas las partes m´ oviles, especialmente las articulaciones, llevando a cabo lo que se denomina una formulaci´ on multicuerpo [7]. La idea de la formulaci´ on multicuerpo es b´ asicamente construir para cada articulaci´ on que vincula los cuerpos del robot, una serie de ecuaciones que definan las restricciones que tienen en su movimiento de forma que las variables articulares est´ en incluidas en estas ecuaciones [8]. Una vez definida la funci´ on de restrici´ on, es posible utilizar alg´ un m´ etodo n´ umerico para encontrar la soluci´ on a la cinem´ atica directa. En este trabajo se utiliza una formulaci´ on multicuerpo y se utiliza un m´ etodo iter´ ativo para encontrar una soluci´ on ´ unica y r´ apida, a partir de la definici´ on de una funci´ on de restricci´ on de distancia. Este art´ ıculo est´ a organizado de la siguiente manera: primero se estudia la geometr´ ıa del mecanismo y con ella la cinem´ atica inversa y directa, se detalla el m´ etodo num´ erico utilizado para obtener la soluci´ on de la cinem´ atica directa, basado en una funci´ on de restricci´ on y el uso del m´ etodo de aproximaciones sucesivas de Newton-Raphson; luego se determina el espacio de trabajo del robot. Finalmente, se presenta un simulador para comprobar los resultados obtenidos y la construcci´ on de un prototipo, se utiliza MATLAB como lenguaje de programaci´ on y plataforma de pruebas. II. EL ROBOT PARALELO DELTA El robot Delta (Fig. 1) es uno de los robots industriales m´ as utilizados hoy en d´ ıa, es de los robots m´ as exitosos que se han dise˜ nado debido a su velocidad y precisi´ on de posicionamiento, se utiliza en tareas de embalaje de productos en la industria alimenticia, m´ edica y de cosm´ eticos, as´ ı como tambi´ en en procesos de ensamble de dispositivos electr´ onicos. El robot Delta esta compuesto por una plataforma fija y una m´ ovil las cuales est´ an unidas por tres cadenas cinem´ aticas
Transcript of Una nueva Metodolog´ıa para la Solucion de la´ Cinematica...
Una nueva Metodologıa para la Solucion de laCinematica del Robot Paralelo Delta
Manuel Cardona. Member IEEEFacultad de Ingenierıa y CCNN, Universidad de Sonsonate, El Salvador, C.A
Resumen— En el presente artıculo se realiza un analisiscompleto de la cinematica del robot paralelo Delta. Se presentauna nueva metodologıa para abordar el problema de lacinematica directa basado en una formulacion multicuerpo. Seplantea un algoritmo iterativo y se encuentra la solucion a lacinematica directa utilizando un metodo numerico. Ademas, sedetermina el espacio de trabajo. Finalmente se presenta el disenode un simulador y la construccion de un prototipo, se utilizaMATLAB como herramienta de simulacion y programacion.
Terminos Indice— Cinematica Directa, Cinematica Inversa,Cuaternios, Jacobiano, Formulacion Multicuerpo, Simulador,MATLAB
I. INTRODUCCION
UN robot paralelo es un mecanismo compuesto poreslabones que forman cadenas cinematicas cerradas,
debido a esto, los mecanismos paralelos presentan muchasventajas respecto a los mecanismos seriales, tales como lavelocidad y precision de posicionamiento. Generalmente, unmecanismo paralelo posee una plataforma fija y una movil, lascuales son conectadas por al menos dos cadenas cinematicasindependientes, normalmente, cada cadena cinematica estaformada por una serie de eslabones unidos por articulaciones.
Las articulaciones pueden ser de 1, 2 o 3 grados delibertad para permitir movimientos de rotacion o traslacionentre los cuerpos conectados. El numero de eslabones y tipode articulaciones, permitira definir el numero de grados delibertad que podra tener la plataforma movil.
La cinematica estudia la relacion entre la posicion de losactuadores y la posicion de la plataforma movil, como sepuede tener como incognita la posicion de los actuadoresconocida la posicion de la plataforma movil o viceversa, lacinematica se puede clasificar en cinematica directa o inversa.
El objetivo de la cinematica directa consiste en encontrar laposicion de la plataforma movil, conocidas las posiciones delos actuadores; mientras que para la cinematica inversa sucedelo contrario, conocida la posicion de la plataforma movil sedebe encontrar la posicion de los actuadores.
Para un mecanismo paralelo, la solucion de la cinematicainversa se puede realizar con planteamientos geometricos sen-cillos, mientras que la cinematica directa resulta complicadaya que debido a la estructura del mecanismo, se pueden tenermultiples soluciones [1].
Algunos autores [2], [3], [4], [5] han dado soluciones de tipoanalıtico al problema de la cinematica directa, haciendo usode la formulacion de Denavit-Hartenberg o consideraciones
de tipo geometrico, pero solo para algunas configuracionesestructurales sencillas.
Otra metodologıa para la resolucion del problema de lacinematica directa consiste en analisis puramente geometricos[6], los cuales resultan en polinomios de elevado grado conmultiples soluciones, esto hace que la obtencion de una unicasolucion sea difıcil debido a la compleja manipulacion deecuaciones matematicas que hay que realizar.
Una metodologıa mas adecuada para resolver la cinematicadirecta y la multiplicidad de soluciones, consiste en modelarlas restricciones de movimiento para todas las partes moviles,especialmente las articulaciones, llevando a cabo lo que sedenomina una formulacion multicuerpo [7].
La idea de la formulacion multicuerpo es basicamenteconstruir para cada articulacion que vincula los cuerpos delrobot, una serie de ecuaciones que definan las restriccionesque tienen en su movimiento de forma que las variablesarticulares esten incluidas en estas ecuaciones [8]. Una vezdefinida la funcion de restricion, es posible utilizar algunmetodo numerico para encontrar la solucion a la cinematicadirecta.
En este trabajo se utiliza una formulacion multicuerpo y seutiliza un metodo iterativo para encontrar una solucion unicay rapida, a partir de la definicion de una funcion de restriccionde distancia.
Este artıculo esta organizado de la siguiente manera:primero se estudia la geometrıa del mecanismo y con ellala cinematica inversa y directa, se detalla el metodo numericoutilizado para obtener la solucion de la cinematica directa,basado en una funcion de restriccion y el uso del metodode aproximaciones sucesivas de Newton-Raphson; luego sedetermina el espacio de trabajo del robot. Finalmente, sepresenta un simulador para comprobar los resultados obtenidosy la construccion de un prototipo, se utiliza MATLAB comolenguaje de programacion y plataforma de pruebas.
II. EL ROBOT PARALELO DELTA
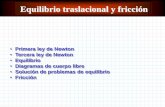
El robot Delta (Fig. 1) es uno de los robots industrialesmas utilizados hoy en dıa, es de los robots mas exitososque se han disenado debido a su velocidad y precision deposicionamiento, se utiliza en tareas de embalaje de productosen la industria alimenticia, medica y de cosmeticos, ası comotambien en procesos de ensamble de dispositivos electronicos.
El robot Delta esta compuesto por una plataforma fija yuna movil las cuales estan unidas por tres cadenas cinematicas

Fig. 1. Robot Paralelo Delta FlexPicker de ABB.
l1
l2
End-Effector
Fixed
platform
Actuators 1
2
3
Fig. 2. Partes del Robot Paralelo Delta.
independientes. En la plataforma fija se situan los actuadorespara cada cadena cinematica tal como muestra la Fig. 2.
Cada cadena cinematica posee basicamente dos eslabones(l1 y l2), el primero, l1, esta unido al actuador permitiendoun movimiento de rotacion (Punto 1, en Fig. 2). El eslabonl1, esta unido un paralelogramo, l2, a traves de articulacionesesfericas (Punto 2, en Fig 2), finalmente la plataforma moviltambien esta unida al paralelogramo atraves de articulacionesesfericas (Punto 3, en Fig. 2).
Como se puede observar en la figura 2, el eslabon l2, estaformado por un paralelogramo. La idea de utilizar un paralelo-gramo es restringir completamente el movimiento de rotacionde la plataforma movil, con lo cual la plataforma movil tendraunicamente 3 grados de libertad de tipo traslacional.
Aunque el espacio de trabajo de un robot Delta no es tangrande, el hecho de que los actuadores estan fijos en la base delrobot y los eslabones utilizados son livianos, con el robot deltase puede obtener hasta una aceleracion de 50G en ambientesexperimentales y de hasta 12 G en aplicaciones industriales[9], es por eso su principal uso se encuentra en tareas de
embalaje. Tal como comenta Bonev [9], su espacio de trabajoideal es la interseccion de tres toros circulares rectos. Losrobots Delta disponibles en el mercado operan normalmenteen un espacio de trabajo cilındrico de 1 m de diametro y 0,2m de altura.
III. CINEMATICA INVERSA
La solucion de la cinematica inversa consiste en encontrarel estado de los actuadores (θ1, θ2, θ3) (Fig. 3), conocidala posicion de la plataforma movil (x0, y0, z0). Para poderencontrar la solucion a la cinematica inversa refiramonos ala Fig. 3. Ademas, consideremos el origen del sistema dereferencia en la plataforma fija y los ejes tal como se muestraen la Fig. 3.
A
B
C
D
E
F
G
H
I
J
0
Y Z
X
l'l
l1
22
G(x0,y0,z0)
x0
71
!2
73R
r
Fig. 3. Configuracion elegida para el Calculo de la Cinematica Inversa
Para facilitar la solucion se analiza cada cadena cinematicapor separado, en el caso de la primera cadena realizamosuna proyeccion al plano YZ, con lo cual se obtiene un lazovectorial tal como se muestra en la Fig 4.
y
z
0
G' D'
A
H
l'
l
d
d
1
2 2
1
!1R
r
Fig. 4. Proyeccion en el plano YZ de la primera cadena cinematica.

A partir de la Fig. 4, tenemos que:
(d1)2 + (d2)2 = (l′2)2 (1)
Donde:(l′2)2 = (l2)2 − (x0)2 (2)
Ademas se debe cumplir que:
OA+ l1cos(θ1) = −y0 +G′D′ + d1
Resolviendo para d1, tenemos que:
d1 = T + l1cos(θ1) (3)
Donde se ha considerado que:
T = OA+ y0 −G′D′
Tambien se puede establecer que,
d2 = z0 + l1sen(θ1) (4)
Sustituyendo (2), (3) y (4) en (1) y simplificando, obtenemosque:
2T1l1cos(θ1) + 2z0l1sen(θ1) = K (5)
Siendo,
K = l22 − x20 − T 2 − l21 − z20Sustituyendo en (5) las identidades trigonometricas,
cos(θ1) =1− t2
1 + t2, sen(θ1) =
2t
1 + t2, donde : t = tan(
θ12
)
Obtenemos:e1t
2 + e2t+ e− 3 = 0 (6)
Donde:
e1 = 2T l1 +Ke2 = −4z0l1e3 = −2T l1 +K
Resolviendo (6) para t, obtendremos dos valores para θ1los cuales son correspondientes a los dos posibles posicionesdel eslabon l1, pero, segun las pruebas realizadas solo la raıznegativa proporciona el valor correcto, por lo tanto tenemosque:
θ1 = 2tan−1−e2 −
√e22 − 4e1e3
2e1(7)
Para las otras dos cadenas cinematicas se puede utilizar elmismo proceso, para facilitar el analisis se considera el hechode que la posicion de los actuadores es simetrica y solo estandispuestos 120◦ uno respecto a otro, considerando ese hechopara las otras dos cadenas y tomando de base la posicion delprimer actuador, bastara multiplicar la matriz de rotacion (120◦
para θ2 y 240◦ para θ3 ) por la posicion del primer actuador yluego aplicar el proceso que utilizamos para θ1 , con lo cualobtendrıamos los valores de θ2 y θ3.
IV. CINEMATICA DIRECTA
En el caso de la cinematica directa la solucion consisteen encontrar la posicion de la plataforma movil (x0, y0, z0),conocido el estado de los actuadores θ1, θ2, θ3 .
El metodo propuesto en este artıculo consiste en laformulacion de un modelo multicuerpo de restricciones yen aplicar el metodo de Newton-Raphson para aproximar larespuesta, se trata de un metodo numerico iterativo el cualparte de la estimacion inicial del estado de los actuadores.
Para aplicar el metodo refiramonos a la Fig. 5, donde se hanconsiderado dos instantes, primero en la posicion de “Home”y luego en una posicion cualquiera.
A
D
G
H
0
YZ
X
l
l1
2
G'
Fig. 5. Configuracion para el Calculo de la Cinematica Directa.
Comenzamos estimando la posicion de la plataforma movily escribiendo la estimacion como un vector de coordenadasgeneralizadas, es decir:
q =[r t
]t(8)
Donde r es la estimacion de la posicion de la plataformamovil (x0, y0, z0) , y p es un cuaternio (e0, e1, e2, e3) quedescribe la rotacion estimada de la plataforma movil, en estecaso como la plataforma movil solo posee movimientos detraslacion, el cuaternio sera de la forma p =
[1 0 0 0
].
Luego, considerando la primera cadena cinematica podemosescribir una ecuacion de lazo vectorial, de tal forma que:
~OA+ ~AH + ~HD − ~OG− ~GG′ − ~G′D = 0 (9)
A partir de (9) podemos escribir la funcion objetivo para laprimera cadena cinematica como:
φ(r, p, t) = l(r, p, t)− l0 (10)
Donde:
l(r, p, t) = | ~OG|+ | ~GG′|+ | ~G′D| − | ~OA| − | ~AH|l0 = | ~HD|

El vector ~OG , representa la posicion de la plataforma movilen la posicion de home (θ1 = θ2 = θ3 = 0), ~GG′ es el vectorde desplazamiento del centro de la plataforma movil, ~G′Drepresenta la posicion de la articulacion unida a la plataformamovil respecto al centro de la plataforma, ~OA es el vectorde posicion del actuador medida desde el origen (radio de laplaforma), ~AH es la longitud de eslabon unido a la plataformafija y l0 la longitud del paralelogramo.
El analisis anterior se puede generalizar para las otras doscadenas, por lo que la funcion de restricciones para el sistemacompleto es:
F (r, p, t) =
φ1(r, p, t)φ2(r, p, t)φ3(r, p, t)
=
l1(r, p, t)− l0,1l2(r, p, t)− l0,2l3(r, p, t)− l0,3
(11)
Para encontrar la posicion real de la plataforma movilpodemos comenzar realizando una expansion en series deTaylor de la funcion de restricciones, si tomamos los dosprimeros terminos de la serie y despreciamos los superiorestenemos que:
F (r, p, t) = Fq(r, p, t)∆q = 0 (12)
En (12), Fq(r, p, t), representa la derivada de la funcionde restricciones con respecto a las coordenadas generalizadasy se denomina Jacobiano de la funcion de restricciones, elJacobiano vendra dado por[10]:
Fq =
UT1 −2UT
1 Ra′1G
UT2 −2UT
2 Ra′2G
UT3 −2UT
3 Ra′3G
(13)
Donde:
Ui : Vector unitario de la funcion de restricciones.
R : Matriz de rotacion de la plataforma movil (como norota sera una matriz identidad).
ai : Matriz antisimetrica asociada a la posicion de lasarticulaciones de la plataforma movil en la posicion de“Home”.
G : Matriz que vincula la rotacion de la plataforma movilcon la variacion del cuaternio de rotacion.
Segun se define en [11], la matriz G en (13) se puedeexpresar a partir de los parametros de Euler como:
G =
−e1 e0 e3 −e2−e2 −e3 e0 e1−e3 e2 −e1 e0
(14)
Una vez definida la derivada de la funcion de restricciones,podemos retomar (12) y escribirla como:
∆q = −F (r, p, t)F †q (r, p, t) (15)
La ecuacion anterior se conoce como el metodo de Newton-Rhapson, en la cual F †q es la matriz pseudoinversa. Luego secorrige iterativamente el valor estimado a partir de:
qi = qi−1 + ∆q (16)
El algoritmo continua y se obtiene la solucion a la cinematicadirecta hasta que la norma de la funcion de restricciones seamenor o igual a un valor de error establecido previamente, esdecir,
∥∥F (r, p, t)∥∥ ≤ ε . La Fig. 6 muestra un diagrama de
flujo de la solucion a la cinematica directa.
Fq=J(F(r,p,t))
||F(r,p,t)||≤ɛ
F(r,p,t)=l(r,p,t)-lo
r, p ,t
q=[r p], l(r,p,t), lo
INICIO
qi=qi-1-F*F'q
l(r,p,t), F(r,p,t)
posición=p
orientación=rFIN
Se tienen como datos de entrada, la posición (r) y orientación estimada (p), y los ángulos de los actuadores (t)
Se determina el vector de coordenadas generalizadas(q) yla función objetivo, l(r,p,t) y lo
Se establece la función de restricciones F(r,p,t)
Se calcula el Jacobiano de la función de restricciones Fq
Se corrige el estado de la plataforma móvil con Newton-Raphson
Se recalcula la Función de restricciones F(r,p,t)
SI
NO
Fig. 6. Algoritmo para el Calculo de la Cinematica Directa [8].
V. ESPACIO DE TRABAJO
El espacio de trabajo se puede definir como aquel conjuntode puntos en los cuales el robot se puede posicionar cuando lasvariables articulares evolucionan de tal manera que se alcanzantodos los puntos del dominio de configuraciones admisibles.En la determinacion del espacio de trabajo de los robotsparalelos influyen tres factores: los lımites mecanicos de lasarticulaciones pasivas; la interferencia entre eslabones; y losvalores lımites de las variables articulares en los actuadores.
Para analizar el espacio de trabajo ideal en funcion de lasdimensiones del robot, se realizo un programa en MATLAB, ladimension de la plataforma fija se tomo de 7 cm, la plataformamovil de 2.5 cm, el eslabon unido al actuador de 15.5 cm y ladimension del paralelogramo de 30 cm. Se evaluaron 928,291voxeles a partir de (7). El resultado se muestra en la Fig. 7.
Segun los resultados obtenidos y de acuerdo a la Fig.7,el espacio de trabajo ideal es la intersecccion de 3 torosrectos circulares. Ademas, se encontro que a medida que la
XX
YY
Z
Z
Workspace of the Delta Parallel Robot
Fig. 7. Espacio de Trabajo Ideal del Robot Paralelo Delta.
coordenada en z se vuelve mas negativa (descenso del robot),el espacio de trabajo se reduce. La figura 8 permite observarde manera clara como se reduce el espacio de trabajo cuandola coordenada en z tiende a valores mas negativos.
Workspace for different values of Z
50 40 30 20 10 0 10 20 30 40 5050
40
30
20
10
0
10
20
30
40
50
z=-15
z=-10
z=-5
z=0
z=5
z=7
X
Y
Fig. 8. Espacio de Trabajo Ideal Para Diferentes Valores de z.
VI. SIMULADOR
Para validar la solucion propuesta para la cinematicadel robot paralelo Delta, se desarrollo un simulador enMATLAB R© 7.6.0. El simulador tiene como entrada lageometrıa del robot (Dimensiones de los eslabones, plataformafija y movil), posicion inicial y final de la plataforma movily el numero de pasos de la simulacion. El programa muestracomo resultado una ventana grafica en la que se puede observarla evolucion del movimiento del robot, si en un momentodeterminado se entra en un punto singular o la coordenada noes alcanzable, el programa muestra un mensaje de advertenciay la ejecucion se detiene. El programa esta compuesto de 5funciones principales, la Fig. 9 muestra la estructura de lasfunciones del simulador, mientras que la Fig. 10 muestra unacaptura de pantalla del programa en ejecucion.
VII. PROTOTIPO
Ademas del simulador se construyo un prototipo a escalapara probar el funcionamiento de los algoritmos planteados enel presente artıculo. El prototipo utiliza servomotores estandar
robot_delta
I=[geo,posini,posfin,pasos]
O=[posefect,angact]
c_inversa
I=[geo,pos]
O=[angact,posact,posmov]
c_directa
I=[geo,angact]
O=[posefect]
Jacobiano
I=[posmov,posact,posefect]
O=[ J ]
grafica
I=[geo,posmov,posact]
O=
Fig. 9. Funciones del Simulador para el Robot Delta.
−20 −10 0 10 20−20
−10
0
10
20
−30
−25
−20
−15
−10
−5
0
5
Delta Robot Simulation
X
Y
Z
Fig. 10. Ventana del Simulador en Ejecucion.
como actuadores, los datos son envıados vıa RS232 desde elsimulador a traves de MATLAB y son recibidos y procesadospor una tarjeta controladora de servos (Fig 11). La tarjetacontroladora es una Lynxmotion SSC-32 con capacidad demanejar hasta 32 servomotores. La Fig. 12 muestra una imagendel prototipo construido.
Entrada de
Datos
Fig. 11. Envıo de datos al prototipo desde MATLAB.
VIII. CONCLUSIONES
En este artıculo se ha analizado la solucion a la cinematicainversa y directa del robot paralelo Delta. La solucion de laCinematica Inversa es mas simple comparada con la solucionde la Cinematica Directa y es facilmente deducible conmetodos geometricos, aunque algunos autores efectuan lasolucion de la Cinematica Inversa considerando la interseccion
Fig. 12. Prototipo del Robot Paralelo Delta.
de 3 esferas, en el presente documento se presento un metodomas facil de abordarla.
En el caso de la Cinematica Directa la mayorıa de losinvestigadores dan soluciones basadas en metodos geometricosobteniendo polinomios de grado elevado lo cual implicamultiples soluciones. El metodo utilizado en el presentedocumento consiste en una formulacion multicuerpo y en eluso de una funcion de restriccion, luego, partiendo de unaposicion estimada se corrige iterativamente con el metodo deNewton-Rhapson obteniendo una solucion unica y rapida alproblema de la Cinematica Directa.
Tambien, se presento el diseno de un simulador utilizandoMATLAB 7.6.0., el cual permite validar las metodologıasplanteadas para la solucion de la Cinematica del RobotParalelo Delta. Finalmente, se construyo un prototipo a escalael cual funciona con 3 servomotores como actuadores, lasordenes a los servomotores se dan desde el simulador. Almismo tiempo que se resuelve la cinematica con MATLABse envıan los datos vıa RS232.
VIII. REFERENCIAS
[1] Cardona, Manuel. N. (2010). Analisis Cinematico de Robots ParalelosPlanares 3RRR. XXIX Convencion de Electricidad y Electronica delIEEE, CONCAPAN. San Pedro Sula, Honduras.
[2] Merlet J.P. (1992 ). Direct kinematics and assembly modes of parallelmanipulators. Internactional Journal of Robotics Research 11(2), 150-162.
[3] Innocenti, C. and V. Parenti-Castelli (1993). Closed form direct positionanalisis of a 5-5 parallel mechanism. ASME Transaction, Journal ofmechanical design 120, 73-99.
[4] Angeles, J. and C.S. Lopez-Cajun (1992). The design of isotropicmanipulator architectures in the presence of redundancies. InternacionalJournal of Robotic Research 11, 196 -201.
[5] Ait-Ahmed, M. and M. Renaud (1993) . Polinomyal representation ofthe forward kinematics of a 6 dof parallel manipulator. In: Proc. of Int.Symp. On Intelligent robotics. (Bangalore, Ed.). Vol. 1.
[6] Lung-Wen Tsai (1999). Robot Analysis, The Mechanics of Serial andParallel Manipulators. John Wiley and Sons, Inc.
[7] Merlet J.P. (1997). Les robots parallles. Hermes.[8] Cardona, Manuel. N. (2011). Algoritmo para la Solucion de la
Cinematica Directa de Robots Paralelos Planares 3RRR Destinadosa Aplicaciones en Tiempo Real. XVIII International Congress ofElectronic, Electrical ans Systems Engineering, IEEE. Lima Peru.
[9] Bonev, I.A. (2011). Delta Parallel Robot - The Story of Success. [EnLınea]. Disponible en: www.parallemic.org/Reviews/Review002p.html [
[10] Yime, E. Saltaren, R. (2007). Reporte interno. Universidad Politecnicade Madrid, ETSII, DISAM. Grupo de Robots y Maquinas Inteligentes.
[11] Haugh, E. J. (1989). Computer aided kinematics and dynamics ofmechanical systems. Allyn and Bacon.