Unidad Vi Criterio de Ziegler y Nichols

of 11
-
Upload
xaviertorres -
Category
Documents
-
view
219 -
download
0
Transcript of Unidad Vi Criterio de Ziegler y Nichols
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
1/11
Unidad VI: Criterio de Ziegler
Nichols (Reglas de sintonía de
controladores PID)
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
2/11
Los controladores PID son ampliamente usados en los sistemas
de control industrial.
Se aplican a la mayoría de los sistemas de control. Pero se
aprecia más su utilidad cuando el modelo de la planta a controlar
no se conoce y los métodos analíticos no pueden ser empleados.
El controlador PID recibe una señal de entrada (generalmente es
el error ) y proporciona una salida (acción de control, )
dt
t dedt t et eK t u d
t
i
p
)()(
1)()(
)(t e )(t u
Criterio de Ziegler-Nichols para sintonizar controladores PID
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
3/11
Entonces, la función de transferencia del controlador PID es
s
sK sG d
i
pc
11)(
donde es la ganancia proporcional, el tiempo integral y .
es el tiempo derivativo. El esquema habitual de uso delcontrolador PID es:
pK i d
s
sK
d i p
11 planta
Figura1. Control PID de una planta.
Criterio de Ziegler-Nichols para sintonizar controladores PID
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
4/11
Reglas de Ziegler-Nichols para sintonización de controladores PID
Ziegler y Nichols propusieron una serie de reglas para afinar controladores PID con base a una respuesta experimental.
Definieron dos métodos.
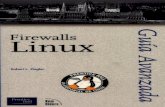
Primer método. Se obtiene experimentalmente la respuesta dela planta a una entrada escalón y si la respuesta no tiene
oscilaciones y además posee un retardo tal que se forma una
“ese”, puede obtenerse los parámetros del controlador PID
utilizando el primer método. En la figura 2 se observa la
respuesta en forma de s.
Criterio de Ziegler-Nichols para sintonizar controladores PID
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
5/11
T Lt
)(t c
lexióninf de
puntoalgentetanrecta
Esta respuesta se caracteriza con el tiempo de atraso y la
constante de tiempo . Y se puede aproximar por un sistema de
primero orden con atraso de transporte.
L
T
1)(
)(
Ts
Ke
sU
sC Ls
Figura 2. Curva experimental en forma de “ese”
Criterio de Ziegler-Nichols para sintonizar controladores PID
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
6/11
para obtener y , se traza una recta tangente al punto de
inflexión de la respuesta, la intersección con el eje del tiempo y
con el valor final de la amplitud forman las distancias y .
L T
L T
Con y , se obtienen los parámetros del controlador PID
utilizando la tabla 1.
L T
Tipo de controlador pK i d
L
T
LT 9.0
L
T 2.1
3.0 L
L2 L5.0
0
0P
PI
PID
Tabla 1. Valores de sintonización, método uno.
Criterio de Ziegler-Nichols para sintonizar controladores PID
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
7/11
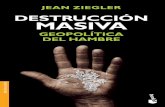
Segundo método. Se utiliza para sistemas que pueden tener
oscilaciones sostenidas. Primero se eliminan los efectos de la
parte integral y derivativa. Después, utilizando solo la ganancia
. , haga que el sistema tenga oscilaciones sostenidas. El valor
de ganancia con que se logre esto se llama ganancia crítica
. , que corresponde a un periodo crítico .
pK
cr K cr P
cr P
t
Figura 3. Oscilación sostenida.
Criterio de Ziegler-Nichols para sintonizar controladores PID
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
8/11
Tipo de controlador pK i d
cr K 5.0
cr P2
10
0P
PI
PID
cr K 45.0
cr K 6.0 cr P5.0 cr P125.0
Con los valores de y se calculan lo valores de los
parámetros del controlador PID, utilizando la tabla 2..
cr K cr P
Tabla 2. Valores de sintonización, método dos.
Criterio de Ziegler-Nichols para sintonizar controladores PID
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
9/11
Ejemplo: Utilice las reglas de Ziegler-Nychols para encontrar los
parámetros del controlador PID del siguiente sistema de control
ss
K d i
p
11
Figura4. Control PID de una planta.
)5)(1(
1
sss
)(sC )(s R
p
p
K sss
K
s R
sC
56)(
)(23
Solución:
Como el sistema tiene un integrador, se usa el método dos. Se
cancela la parte integral y derivativa del controlador. Se obtiene
la función de transferencia de lazo cerrado
Criterio de Ziegler-Nichols para sintonizar controladores PID
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
10/11
056 23 pK sss
De la ecuación característica se obtiene el valor de la ganancia
que produce oscilaciones sostenidas (método Routh-Hurwitz)
0)(5)(6)( 23 pK j j j
056 23 p
K j j
30 pK 5
El valor de ganancia es la ganancia crítica
30cr
K
Mientras que el período crítico se obtiene de 5
81.22
cr P
Criterio de Ziegler-Nichols para sintonizar controladores PID
-
8/16/2019 Unidad Vi Criterio de Ziegler y Nichols
11/11
Criterio de Ziegler-Nichols para sintonizar controladores PID
Por último se calculan los parámetros del controlador PID:
405.15.0 cr i
P
35124.0125.0 cr d P
186.0 cr p K K
sssGc 351246.04054.1
1
118)(