UNIVERSIDAD AUTÓNOMA METROPOLITANA, UNIDAD AZCAPOTZALCO, DIVISIÓN DE...
25
UNIVERSIDAD AUTÓNOMA METROPOLITANA, UNIDAD AZCAPOTZALCO, DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA LABORATORIO DE MECANISMOS TRIMESTRE _____________ PRÁCTICA 7. 1. NOMBRE Y CARRERA: _________________________________________________ 2. NOMBRE DE LA PRÁCTICA: Análisis cualitativo y cuantitativo de los parámetros cinemáticos de una Leva de placa y seguidor con rodillo. 3. ARCHIVOS: • Leva de placa y seguidor con rodillo E 1.ipt • Leva de placa y seguidor con rodillo E 2.ipt • Leva de placa y seguidor con rodillo E 3.ipt • Leva de placa y seguidor con rodillo E 4.ipt • Leva de placa y seguidor con rodillo.iam 4. DATOS: Para la Leva de placa y seguidor con rodillo que se muestran en diferentes posiciones en las Figuras 7a, 7b, 7c y 7d; la geometría de sus eslabones 1, 2, 3 y 4 es, respectivamente, la indicada en los archivos anteriores. El eslabón 2 tiene una velocidad angular constante de -2.4 rad/s. El mecanismo obtenido, por inversión, fijando el eslabón 2; se muestra en diferentes posiciones en las Figuras 7e, 7f, 7g y 7h.
Transcript of UNIVERSIDAD AUTÓNOMA METROPOLITANA, UNIDAD AZCAPOTZALCO, DIVISIÓN DE...

UNIVERSIDAD AUTÓNOMA METROPOLITANA, UNIDAD AZCAPOTZALCO, DIVISIÓN DE CIENCIAS BÁSICAS E INGENIERÍA
LABORATORIO DE MECANISMOS TRIMESTRE _____________
PRÁCTICA 7.
1. NOMBRE Y CARRERA: _________________________________________________
2. NOMBRE DE LA PRÁCTICA: Análisis cualitativo y cuantitativo de los parámetros cinemáticos de una Leva de placa y seguidor con rodillo.
3. ARCHIVOS: • Leva de placa y seguidor con rodillo E 1.ipt • Leva de placa y seguidor con rodillo E 2.ipt • Leva de placa y seguidor con rodillo E 3.ipt • Leva de placa y seguidor con rodillo E 4.ipt • Leva de placa y seguidor con rodillo.iam
4. DATOS: Para la Leva de placa y seguidor con rodillo que se muestran en diferentes posiciones en las Figuras 7a, 7b, 7c y 7d; la geometría de sus eslabones 1, 2, 3 y 4 es, respectivamente, la indicada en los archivos anteriores. El eslabón 2 tiene una velocidad angular constante de -2.4 rad/s. El mecanismo obtenido, por inversión, fijando el eslabón 2; se muestra en diferentes posiciones en las Figuras 7e, 7f, 7g y 7h.
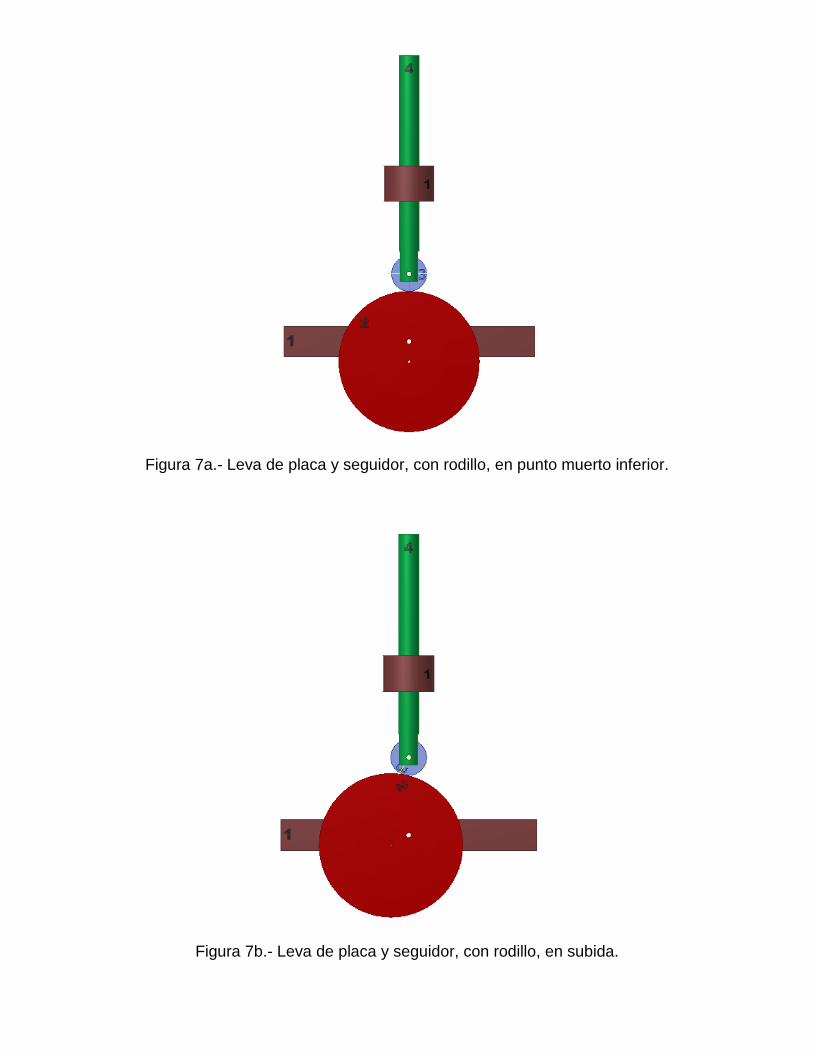
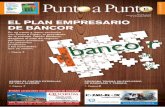
Figura 7a.- Leva de placa y seguidor, con rodillo, en punto muerto inferior.
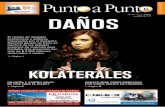
Figura 7b.- Leva de placa y seguidor, con rodillo, en subida.

Figura 7c.- Leva de placa y seguidor, con rodillo, en punto muerto superior.
Figura 7d.- Leva de placa y seguidor, con rodillo, en retorno.

Figura 7.e.- Mecanismo obtenido por inversión al fijar el eslabón 2, para 𝜃𝜃 = 30°.
Figura 7.f.- Mecanismo obtenido por inversión al fijar el eslabón 2, para 𝜃𝜃 = 135°.

Figura 7.g.- Mecanismo obtenido por inversión al fijar el eslabón 2, para 𝜃𝜃 = 180°.
Figura 7.h.- Mecanismo obtenido por inversión al fijar el eslabón 2, para 𝜃𝜃 = 240°.

5. INTRODUCCIÓN.- En esta práctica se analizará: • Las posiciones, velocidades y aceleraciones del eslabón 4 para toda posición angular del
eslabón 2.
6. OBJETIVO.- Al final de la práctica el alumno será capaz de analizar cualitativa y cuantitativamente la cinemática del la Leva de placa y seguidor con rodillo para toda posición angular del eslabón 2.
7. FUNDAMENTO:
Levas. Una leva es un elemento mecánico que sirve para impulsar a otro elemento, llamado seguidor, para que desarrolle un movimiento específico. Los mecanismos de leva y seguidor son sencillos y poco costosos, tienen pocas piezas móviles y ocupan espacios muy reducidos. Además, no son difíciles de diseñar movimientos del seguidor que tengan casi cualquier característica deseada. Por estas razones, los mecanismos de leva y seguidor se emplean profusamente en la maquinaria moderna.
La teoría desarrollada en las prácticas anteriores, es aplicable a los sistemas leva - seguidor.
Clasificación de levas y seguidores.
Las levas se clasifican según sus formas básicas; en las Figuras 7.1a a 7.1d se muestran cuatro tipos diferentes:
a) Leva de placa, llamada también de disco o radial.
b) Leva de cuña.
c) Leva cilíndrica o de tambor.
d) Leva lateral o de cara.
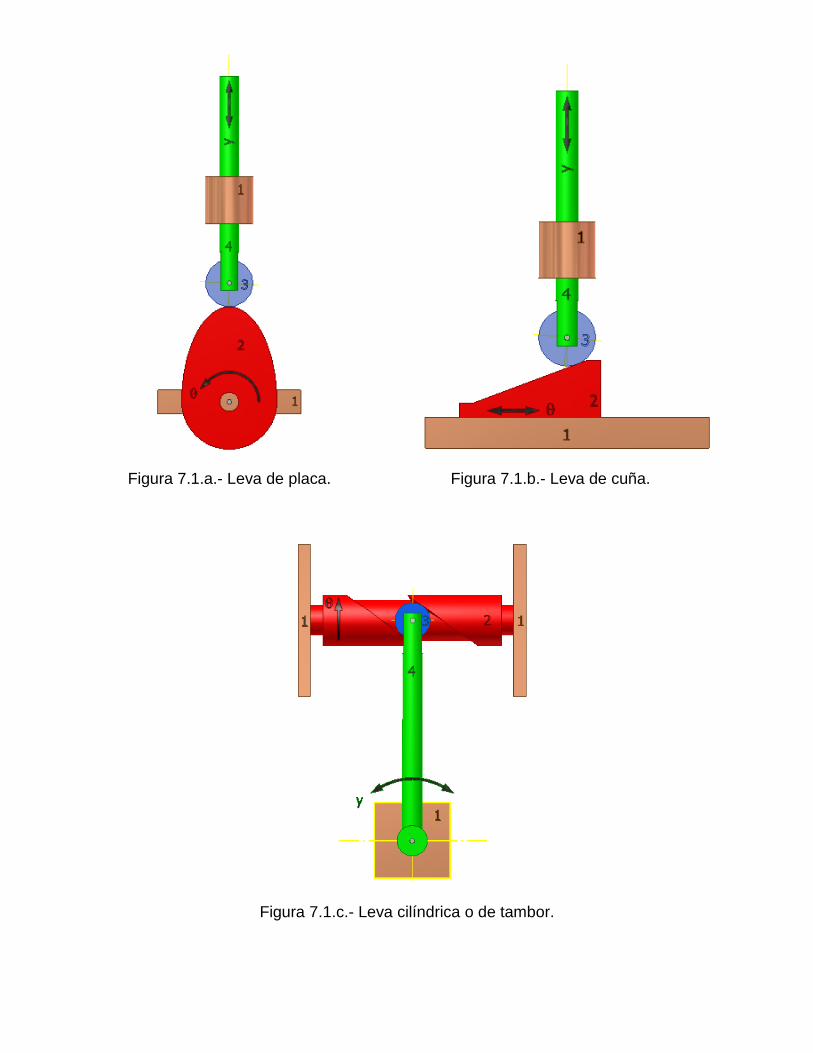
Figura 7.1.a.- Leva de placa. Figura 7.1.b.- Leva de cuña.
Figura 7.1.c.- Leva cilíndrica o de tambor.

Figura 7.1.d.- Leva lateral o de cara.
La menos común es la leva de cuña debido a que necesita un movimiento alternativo de entrada en lugar de un movimiento continuo y, con mucho, la más común de todas es la leva de placa. Por esta razón, analizaremos específicamente las levas de placa cuyos conceptos se aplican a todos los tipos de levas.
Los seguidores se clasifican como se indica a continuación:
a) Seguidor de cuña.
b) Seguidor de cara plana.
c) Seguidor con rodillo.
d) Seguidor de cara esférica o zapata curva.
En las Figuras 7.2a a 7.2d se muestran levas de placa que actúan con los cuatro diferentes tipos de seguidores.
Figura 7.2.a.- Seguidor de cuña. Figura 7.2.b.- Seguidor de cara plana.
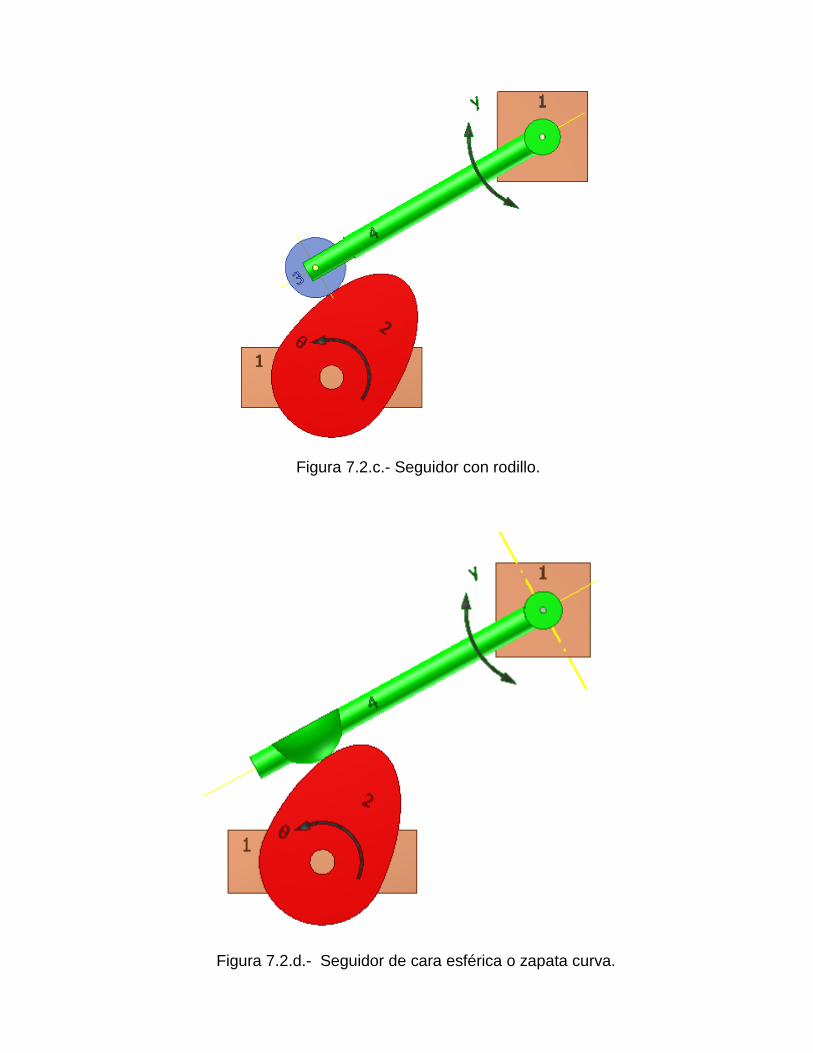
Figura 7.2.c.- Seguidor con rodillo.
Figura 7.2.d.- Seguidor de cara esférica o zapata curva.

Otro método de clasificación es de acuerdo con el movimiento de salida característico, permitido entre el seguidor y el marco. Algunos sistemas tienen seguidores de movimiento alternativo (traslación) como se ilustra en las Figuras 7.1. a, b, d y 7.2 a, b. Otros seguidores tienen movimiento oscilante (rotación) como en las Figuras 7.1 c y 7.2 c, d. Además, una subdivisión posterior de los seguidores de movimiento alternativo se basa en el hecho de si la línea central del vástago del seguidor es excéntrica, en relación con el centro de rotación de la leva, como en la Figura 7.2.a, o radial como se presenta en las Figuras 7.1.a y 7.2b.
En todos los sistemas el diseñador debe asegurarse de que el seguidor se mantenga en contacto con la leva. Esto se logra mediante la gravedad, incluyendo un resorte apropiado o por medio de otra restricción mecánica. En la Figura 7.3.a se muestra un ejemplo de leva de anchura constante, en donde se tienen dos puntos de contacto entre la leva y el seguidor generando la restricción. También se puede introducir la restricción mecánica empleando sistemas duales o conjugados, en una disposición como la que se muestra en la Figura 7.3.b. En este caso, cada leva tiene su propio rodillo; montados éstos sobre un seguidor común.
Figura 7.3.a.- Leva de anchura constante.

Figura 7.3.b.- Sistema dual o conjugado.
Diagramas de desplazamiento.
Con objeto de analizar los sistemas de levas en general, el movimiento de entrada conocido se denotará por 𝜃𝜃(𝑡𝑡) y el de salida por 𝑦𝑦. Durante la rotación de la leva una revolución completa, el seguidor ejecuta una serie de procesos como los que se muestran gráficamente en el diagrama de desplazamientos de la Figura 7.4. En un diagrama de esta índole, la abscisa representa un ciclo del movimiento de entrada 𝜃𝜃 y se dibuja a cualquier escala conveniente. La ordenada representa el recorrido 𝑦𝑦 del seguidor y, en el caso de un seguidor de movimiento alternativo, se dibuja casi siempre a escala completa para ayudar al trazado de la leva. En un diagrama de desplazamientos se puede identificar una sección de la gráfica conocida como subida, en donde el seguidor se aleja del centro de la leva. La subida máxima se llama elevación. Los periodos durante los cuales el seguidor se encuentra en reposo se conocen como detenciones y el retorno es el periodo en el que el movimiento del seguidor es hacia el centro de rotación de la leva.

Figura 7.4.- Diagrama de desplazamientos.
Muchas de las características esenciales de un diagrama de desplazamientos, por ejemplo, la elevación o la colocación y duración de las detenciones, por lo común son dictadas por las necesidades de la aplicación. Hay muchas formas posibles de movimiento para el seguidor que se pueden usar para la subida y el retorno, algunos son preferibles a otros, dependiendo de la situación. Uno de los pasos clave en el diseño de una leva es la elección de las formas apropiadas para estos movimientos, esto es, las condiciones en las que el diagrama de desplazamientos se conforma cinemáticamente. Una vez que estos se han elegido, es decir, una vez que se establece la relación exacta entre la entrada 𝜃𝜃 y la salida 𝑦𝑦, se puede construir el diagrama de desplazamientos con precisión y es una representación gráfica de la relación funcional.
𝑦𝑦 = 𝑓𝑓(𝜃𝜃) ----- (7.1)
Esta ecuación, expresada para cada sección del diagrama de desplazamientos, contendrá la naturaleza exacta del perfil de la leva, la información necesaria para su trazado y fabricación, y también las características importantes que determinan la calidad de su comportamiento dinámico.
El diagrama de desplazamientos para el movimiento uniforme es una recta con una pendiente constante. Por consiguiente, en el caso de una velocidad constante de entrada, la velocidad del seguidor también es constante. Este movimiento no es útil para la elevación completa debido a los vértices que se producen en los límites o fronteras con otras secciones del diagrama de desplazamientos. Con todo, se emplea a menudo entre otras secciones curvas, eliminando con ello esos vértices.
Diseño gráfico de perfiles de levas.

Examinaremos ahora el problema de determinar el perfil de la leva requerido para producir un movimiento específico del seguidor. Aquí se supone que el movimiento requerido se determinó por completo en forma gráfica, analítica o numérica. Por consiguiente, se puede trazar un diagrama de desplazamientos completo para una revolución de la leva, ver Figura 7.5.a. El problema ahora es trazar el perfil apropiado de la leva para obtener el movimiento del seguidor indicado en dicho diagrama.
Se presenta una ilustración para el caso de una leva de placa y seguidor con rodillo, como la que se ve en las Figuras 7.5, en las que se muestra:
• El punto de trazo.- Es un punto teórico del seguidor; corresponde a un punto de la línea de un seguidor de cuña ficticio. Usaremos 𝑹𝑹 para referirnos al vector de posición correspondiente. En el caso de seguidor con rodillo, pertenece a la línea alrededor de la cual éste gira. Para un seguidor de cara plana, pertenece a la cara plana.
• La curva de paso.- Es el lugar geométrico generado por el punto de trazo conforme el seguidor se mueve. Para un seguidor de cuña, la curva de paso y el perfil de la leva son idénticas. En el caso de un seguidor de rodillo, están separadas por el radio del rodillo. En la Figura 7.5. b, c, d y e la parte de la curva de paso que no coincide con la circunferencia primaria es de color verde.
• La circunferencia primaria es la más pequeña que se puede trazar con centro en el eje de rotación de la leva y tangente a la curva de paso. El radio de esta circunferencia es 𝑹𝑹0. En la Figura 7.5. b, c, d y e media circunferencia primaria, la que no coincide con la curva de paso, es de color cyan.
• La circunferencia base es la más pequeña que se puede trazar con centro en el eje de rotación de la leva y tangente al perfil de ésta. Usaremos 𝑹𝑹𝑏𝑏 para referirnos al radio de está circunferencia. En el caso de un seguidor de rodillo, es más pequeña que la circunferencia primaria, siendo la diferencia el radio del rodillo. Tanto para un seguidor de cara plana como para un seguidor de cuña, la circunferencia base es idéntica a la circunferencia primaria. En la Figura 7.5. b, c, d y e la circunferencia base es de color morado.
Ubicando los centros instantáneos de velocidad y usándolos para definir las longitudes de los cuatro eslabones es posible obtener el mecanismo de cuatro eslabones equivalente RRRR.
Figura 7.5.a.- Diagrama de desplazamientos. Figura 7.5.b.- Leva de placa y seguidor con rodillo.

Figura 7.5.c.- Inversión de 7.5b. Figura 7.5.d.- Punto muerto superior de 7.5.b.
Figura 7.5.e.- Inversión en posición intermedia.

Al construir un perfil de leva se aplica el principio de inversión cinemática, fijando la leva y haciendo que el seguidor gire en sentido opuesto al de rotación original de la leva; como se muestra en la Figura 7.5.b para 12 posiciones incluyendo solo leva y rodillo. También se indica dicha inversión cinemática, para las posiciones 4, 6 y 7, en las Figuras 7.5. c, d y e, respectivamente, incluyendo marco, leva, rodillo y seguidor.
Como se muestra en las Figuras 7.5, una revolución de la leva se divide en una cierta cantidad de líneas radiales (12 en este caso, por lo que cada línea radial i está a 30 grados de las líneas radiales i-1 e i+1) y se asignan números de estación a los puntos de trazo de éstas; los cuales se obtienen sobre las líneas radiales, considerando que para cada línea radial la parte verde se debe tomar del diagrama de desplazamientos y su longitud debe ser igual a 𝑹𝑹− 𝑹𝑹0. Una curva suave que pase por estos puntos de trazo es la curva de paso. En el caso de un seguidor con rodillo, como el de este ejemplo, simplemente se dibuja una circunferencia, representando al rodillo, en cada una de sus 12 posiciones y luego se construye el perfil de la leva como una curva suave tangente.
Una solución por el método gráfico tendrá siempre la correspondiente solución analítica para encontrar la curva tangente a una familia de circunferencias. Para un ejemplo numérico o paramétrico el alumno deberá obtener la ecuación de la familia de curvas (o rectas), derivar respecto de 𝜃𝜃 para obtener una segunda ecuación, hacer simultáneas ambas ecuaciones para obtener el perfil correspondiente de la leva.
Derivadas del movimiento del seguidor.
El diagrama de desplazamientos es una función matemática que relaciona los movimientos de entrada y salida del sistema leva – seguidor. En términos generales, esta relación es
𝑦𝑦 = 𝑦𝑦(𝜃𝜃) ----- (7.2)
Su primera derivada representa la pendiente del diagrama de desplazamientos para cada ángulo 𝜃𝜃. Se tendrá dificultades si la 𝑦𝑦/ tiene un valor demasiado alto.
𝑦𝑦´(𝜃𝜃) = 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
----- (7.3)
Cuando la segunda derivada se hace infinita, el perfil de la leva se hace puntiagudo, lo que constituye una condición no satisfactoria desde el punto de vista de los esfuerzos de contacto entre las superficies de leva y seguidor.
𝑦𝑦 ´´ = 𝑑𝑑2𝑑𝑑𝑑𝑑𝑑𝑑2
----- (7.4)
La tercera derivada no deberá ser nunca infinita.
𝑦𝑦 ´´´ = 𝑑𝑑3𝑑𝑑𝑑𝑑𝑑𝑑3
----- (7.5)

La exposición anterior se relaciona con las derivadas cinemáticas del movimiento del seguidor. Estas son derivadas con respecto a 𝜃𝜃 y se relacionan con la geometría del sistema. Ahora consideraremos las derivadas de los movimientos del seguidor con respecto al tiempo. En primer lugar se supondrá que se conoce la historia del movimiento de entrada 𝜃𝜃(𝑡𝑡). También se supondrá conocida su
velocidad 𝜔𝜔 = 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
, su aceleración ∝= 𝑑𝑑2𝑑𝑑𝑑𝑑𝑑𝑑2
y su tirón ∝̇= 𝑑𝑑3𝑑𝑑𝑑𝑑𝑑𝑑2
. Por lo común, la leva de placa es impulsada por un eje a velocidad angular constante. En este caso, 𝜔𝜔 es conocida, 𝜃𝜃 = 𝜔𝜔𝑡𝑡, y ∝=∝̇=0. Sin embargo, durante el arranque del sistema (estado transitorio) éste no es el caso, y primero se considerará la situación más general.
Partiendo de la ecuación general del diagrama de desplazamientos, 𝑦𝑦 = 𝑦𝑦(𝜃𝜃) y 𝜃𝜃 = 𝜃𝜃(𝑡𝑡), se puede encontrar las derivadas respecto del tiempo del seguidor.
�̇�𝑦 = 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
= 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
= 𝑦𝑦´𝜔𝜔 ----- (7.6)
�̈�𝑦 = 𝑑𝑑2𝑑𝑑𝑑𝑑𝑑𝑑2
= 𝑦𝑦´´𝜔𝜔2 + 𝑦𝑦´ ∝ ----- (7.7)
𝑦𝑦 = 𝑑𝑑3𝑑𝑑𝑑𝑑𝑑𝑑3
= 𝑦𝑦´´´𝜔𝜔3 + 3𝑦𝑦´´𝜔𝜔𝜔𝜔 + 𝑦𝑦´�̇�𝜔 ----- (7.8)
Cuando la velocidad de la leva es constante (estado permanente), estas expresiones se reducen a
�̇�𝑦 = 𝑦𝑦´𝜔𝜔 ----- (7.9)
�̈�𝑦 = 𝑦𝑦´´𝜔𝜔2 ----- (7.10)
𝑦𝑦 = 𝑑𝑑3𝑑𝑑𝑑𝑑𝑑𝑑3
= 𝑦𝑦´´´𝜔𝜔3 ----- (7.11)
Por esta razón se ha hecho costumbre común referirse a las gráficas de las derivadas cinemáticas 𝑦𝑦´, 𝑦𝑦´´, 𝑦𝑦´´´ como las curvas de “velocidad”, “aceleración”, “tirón” para un movimiento dado. Estos nombres serían apropiados solo para una leva de velocidad constante, en estado permanente, y solo en el caso de que su escala fuera determinada por 𝜔𝜔, 𝜔𝜔2, 𝜔𝜔3, respectivamente.
Semejanzas entre levas y mecanismos de cuatro barras.
El mecanismo plano de cuatro eslabones RRRR es el más estudiado. Otros mecanismos, como el de leva de placa con seguidor de rodillo centrado, pueden visualizarse como tal. En las Figuras 7.6 y 7.7 se muestras el primero y el segundo, respectivamente, para analizar sus similitudes.

Figura 7.6.- Mecanismo de cuatro eslabones RRRR.
Figura 7.7.- Leva de placa y seguidor con rodillo, centrado, como mecanismo de cuatro eslabones RRRR.
Para el segundo los centros instantáneos de velocidad están indicados en la Figura 7.7. Las longitudes de sus eslabones son

𝐿𝐿1 = 𝑂𝑂12𝑂𝑂14 = ∞
𝐿𝐿2 = 𝑂𝑂12𝑂𝑂23
𝐿𝐿3 = 𝑂𝑂23𝑂𝑂34
𝐿𝐿4 = 𝑂𝑂34𝑂𝑂14 = ∞
Puesto que de la Figura 7.7 podemos aseverar que 𝐿𝐿3 < 𝐿𝐿2, el eslabón fijo (1) es el opuesto al de menor longitud. Por la Ley de Grashof, que por cierto se cumple, tendríamos un oscilador – oscilador.
Eslabonamientos equivalentes.
Con el propósito de análisis cinemático, un mecanismo plano, de circuito cerrado, con par superior puede ser reemplazado por un eslabonamiento plano equivalente, también de circuito cerrado, consistiendo solo de pares inferiores. Puede enfatizarse que esta equivalencia, en general, es válida solo para estudiar velocidades y aceleraciones características instantáneas. Por ejemplo, consideremos el mecanismo con par superior mostrado en la Figura 7.8.a. Los eslabones 2 y 3, ambos conectados al eslabón fijo a través de pares cinemáticos R, están en contacto uno con el otro en el punto C, formando el par superior. Este par superior permite simultáneamente movimiento de rodadura y deslizamiento entre los eslabones 2 y 3. Sean A y B los centros de curvatura de las superficies 2 y 3, respectivamente, en el punto C. El eslabonamiento de pares inferiores equivalente instantáneo mostrado en la Figura 7.8.b, es generado por adición del eslabón AB y el reemplazo del par superior por un par de revoluta en A y otro par de revoluta en B. Puede notarse que las posiciones relativas entre los eslabones 2 y 3 del mecanismo original y del mecanismo equivalente son las mismas mientras A y B sean centro de curvatura de C. Consecuentemente, la equivalencia instantánea es buena solo para análisis de velocidad y aceleración. Note que, en general, los centros de curvatura A y B cambian cuando el mecanismo se mueve. Luego, solo para las situaciones especiales de perfiles circulares o rectos, la equivalencia puede permanecer válida para el ciclo completo de movimiento, ver Figuras 7.9, 7.11 y 7.12.
Figura 7.8.a.- Mecanismo, con par cinemático superior, con equivalente temporal.
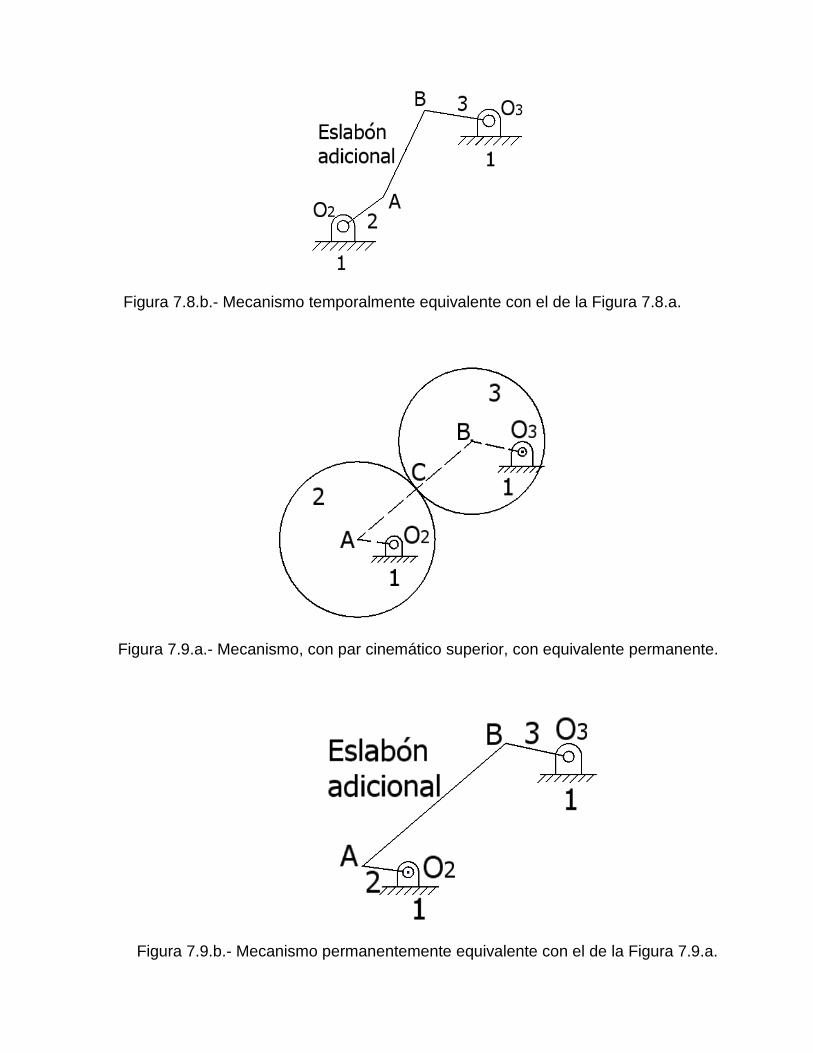
Figura 7.8.b.- Mecanismo temporalmente equivalente con el de la Figura 7.8.a.
Figura 7.9.a.- Mecanismo, con par cinemático superior, con equivalente permanente.
Figura 7.9.b.- Mecanismo permanentemente equivalente con el de la Figura 7.9.a.

Otro ejemplo de un eslabonamiento de par inferior equivalente para un sistema leva seguidor es mostrado en las Figura 7.10. La corredera 4 es el eslabón adicional y el par superior es reemplazado por dos pares inferiores, uno de revoluta y el otro prismático. El centro de curvatura de la superficie de la leva está en 𝐴𝐴. El centro de curvatura del seguidor de cara plana está en el infinito y, consecuentemente, el par inferior adicional cambia a prismático. En las Figuras 7.13 se muestra un caso similar en el que se sustituyeron los eslabones unidimensionales por eslabones tridimensionales. En las Figuras 7.11 a y b se muestra un mecanismo con par superior, en el que la entrada tiene rotación y la salida traslación, y su equivalente permanente. En las Figuras 7.12 a y b se muestra un mecanismo con par superior, en el que la entrada y la salida tienen rotación, y su equivalente permanente.
Figura 7.10.a.- Mecanismo con par superior. Figura 7.10.b.- Mecanismo equivalente.
Figura 7.11.a.- Mecanismo con par superior. Figura 7.11.b.- Mecanismo equivalente.

Figura 7.12.a.- Mecanismo con par superior. Figura 7.12.b.- Mecanismo equivalente.
Figura 7.13.a.- Mecanismo con par superior. Figura 7.13.b.- Mecanismo equivalente.

Dos engranes también puede ser visualizados como un mecanismo de cuatro eslabones RRRR. Los dos engranes y su mecanismo equivalente se muestran en las Figuras 7.14 a y b. En la Figura 7.14a el engrane 2 (rojo) gira con respecto al eslabón fijo, haciendo girar en sentido contrario al engrane 4 (verde). En la Figura 7.14b se muestra el mecanismo equivalente.
Figura 7.14a.- Dos engranes
Figura 7.14b.- Mecanismo equivalente.
8. PROCEDIMIENTO.- Para el análisis del mecanismo virtual, primero se deberá abrir cada uno de los archivos de los cuatro eslabones para conocer medidas y detalles de los mismos.
• Para 𝜃𝜃2 = 60° trazar el polígono unifilar de posiciones, del mecanismo equivalente, ubicar los centros instantáneos de velocidad y medir la distancia de O23 a O13 y de O24 a O12. Ver Figura 7.15.

Figura 7.15.- Polígono de posiciones con centros instantáneos de velocidad.
• Calcular la velocidad de O23 y dividirla entre la distancia de O23 a O13 para obtener la velocidad angular del eslabón 3.
• Determinar el sentido de la velocidad angular del eslabón 3. • Calcular la velocidad de O24 y dividirla entre la distancia de O24 a O14, para obtener la
velocidad angular del eslabón 4. • Determinar el sentido de la velocidad angular del eslabón 4. • Trazar la imagen de velocidades de los eslabones 2, 3 y 4; la imagen de velocidades del
eslabón 2 deberá tener una longitud igual a la velocidad de O23, las imágenes de velocidades de los eslabones 2, 3 y 4 deberán formar un ángulo de 90 con su imagen de posiciones si su velocidad angular es positiva o un ángulo de 270 grados si su velocidad angular es negativa. Ver Figura 7.16.
Figura 7.16.- Polígono de velocidades.

• Medir la velocidad de O34 respecto a O23 y dividirla entre la longitud del eslabón 3 para obtener su velocidad angular, determinando su sentido. Comparar con el valor obtenido previamente.
• Medir la velocidad de O34 respecto a O14 y dividirla entre la longitud del eslabón 4 para obtener su velocidad angular, determinando su sentido. Comparar con el valor obtenido previamente.
• Calcular las aceleraciones normales de O23O12, O34O23, O34O14 y la tangencial de O23O12.Trazar la imagen de aceleraciones normales y tangenciales de los eslabones 2, 3 y 4; las imágenes de aceleraciones normales deberán formar un ángulo de 180 grados con su imagen de posiciones; las imágenes de aceleraciones tangenciales deberán formar un ángulo de 90 grados con su imagen de posiciones si su aceleración angular es positiva o un ángulo de 270 grados si su aceleración angular es negativa. Ver Figura 3.6.
Figura 7.17.- Polígono de aceleraciones.
• Medir las aceleraciones tangenciales de O34O23 y O34O14 y dividirlas, respectivamente, entre la longitud del eslabón 3 y 4; para obtener sus aceleraciones angulares.
• Trazar la imagen de posiciones considerando la inversión y, analíticamente, resolver posiciones, velocidades y aceleraciones para cualquier valor de 𝜃𝜃2. Ver Figura 7.18.

Figura 7.18.- Circunferencia base, circunferencia primaria y curva de paso.
9. RESULTADOS:
10. CONCLUSIONES:
11. CUESTIONARIO: • ¿Cuál es la relación funcional 𝑦𝑦 = 𝑓𝑓(𝜃𝜃)?
12. REFERENCIAS:
13. PONDERACIÓN:
Sobre una escala de 100; el polígono de velocidades corresponderá a 10 puntos, el polígono de aceleraciones corresponderá a 20 puntos, la respuesta al cuestionario corresponderá a 20 puntos, la velocidad del seguidor obtenida analíticamente para cualquier valor de 𝜃𝜃2 corresponderá a 20, la aceleración del seguidor obtenida analíticamente para cualquier valor de 𝜃𝜃2 corresponderá a 30.