Universidad Nacional de Rosario Facultad de Ciencias ... · 7.3 Tolerancia a fallas 9 ......
24
Universidad Nacional de Rosario Facultad de Ciencias Exactas Ingeniería y Agrimensura Cátedra: Sistemas Distribuidos Monografía Tema: “Redes inalámbricas de sensores” Integrantes: Rios Villalonga, Marina Tomas Seri, Noelia Noviembre 2003
-
Upload
truongtruc -
Category
Documents
-
view
214 -
download
2
Transcript of Universidad Nacional de Rosario Facultad de Ciencias ... · 7.3 Tolerancia a fallas 9 ......

Universidad Nacional de RosarioFacultad de Ciencias Exactas Ingeniería y
Agrimensura
Cátedra: Sistemas Distribuidos
Monografía
Tema: “Redes inalámbricas de sensores”
Integrantes: Rios Villalonga, Marina Tomas Seri, Noelia
Noviembre 2003
Indice Página
1. Introducción a las redes inalámbricas 22. Medios de transmisión inalámbricos 3 2.1 Microondas terrestres 3 2.2 Microondas por satélite 4 2.3 Espectro infrarrojo (IR) 4 2.4 Transmisión por ondas de luz 5 2.5 Ondas de radio 53. Configuración de redes inalámbricas 6 3.1 Red ad-hoc 6 3.2 Red Infraestructura 74. Introducción a las redes inalámbricas de sensores 85. Características de las redes de sensores 86. Definiciones de redes de sensores 87. Medidas de desempeño 9 7.1.Eficiencia del uso de la energía y de la vida útil del sistema 9 7.2 Latencia y precisión 9 7.3 Tolerancia a fallas 9 7.4 Exactitud 10 7.5 Escalabilidad 10 7.6 Exposición de los sensores 108. Arquitectura 109. Modelos de comunicación 12 9.1. Modelos de envío de datos 12 9.2. Modelos dinámicos de red 1310. Análisis de los protocolos existentes para redes de sensores 1411. Seguridad en redes de sensores 1412 .Estándar IEEE 1451 15 12.1 Aplicación del estándar IEEE 1451 17 12.1.1 Aplicación remota (Remote Monitore Application) 17 12.1.2 Control distribuido (Distributed control) 18 12.1.3 Actuación Remota (Remote Actuating) 18 12.1.4 Medida y control de colaboración (Collaborative measurement and control) 1813. Bibliografía 22
2
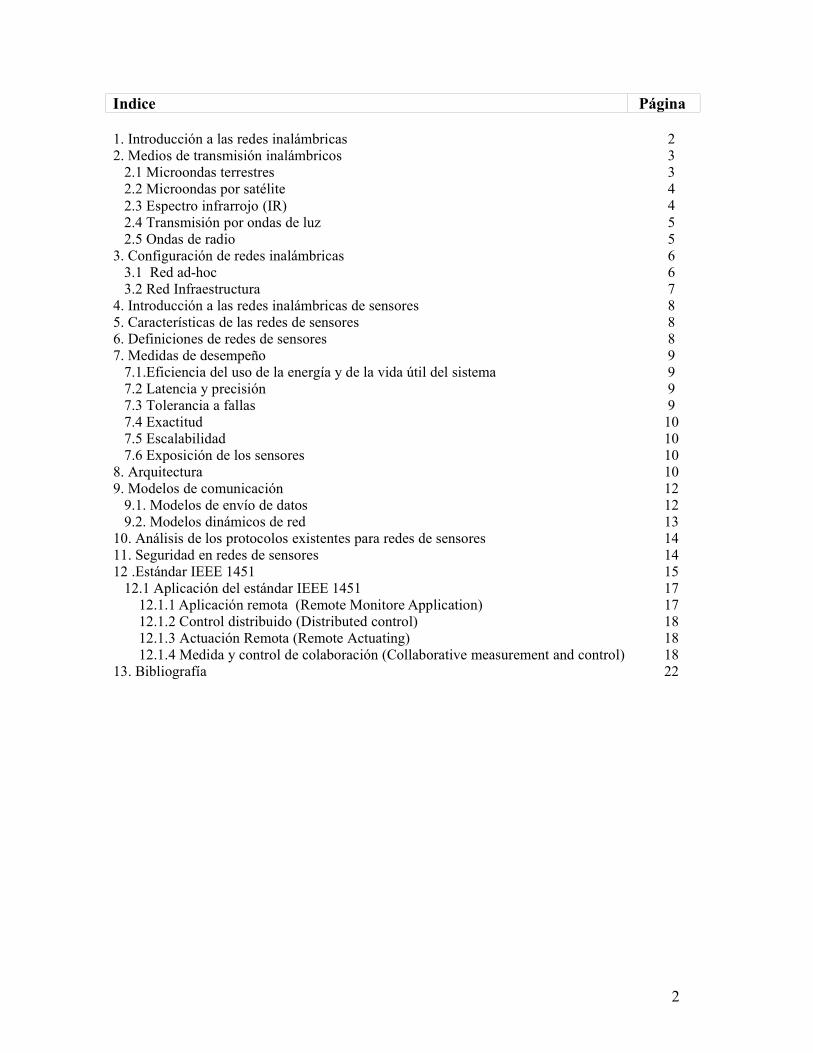
Para comenzar el desarrollo de nuestro tema sobre Redes Inalámbricas de Sensores haremosuna introducción a redes inalámbricas para comprender su funcionamiento.
1. INTRODUCCIÓN A LAS REDES INALÁMBRICAS
Las redes inalámbricas surgieron como complemento de las redes cableadas, ya que laverdadera ventaja de las redes inalámbricas son las diferentes opciones de accesibilidad ymovilidad que ofrecen frente a las cableadas.
La tecnología inalámbrica cambio el paradigma de las computadoras de escritorio en lascuales, tanto la información como el usuario se encontraban atados a la red, ahora existennuevas formas de acceso y actualización de información.Debido al desarrollo que han tenido los dispositivos inalámbricos, la tecnología inalámbrica,ha ido evolucionando con mayor fuerza en los últimos años, alcanzando avances importantesen cuanto a las velocidades de transmisión, seguridad y cobertura.
La primera empresa que desarrolló y comercializó un sistema inalámbrico de conexión a redesfue NCR, cuando a finales de 1990 lanzó un sistema que utilizaba ondas de radio parainterconectar computadoras. Desde entonces, la comunicación por redes inalámbricas hadejado de ser experimental, para convertirse en una solución real a problemas concretos.
Aunque esta tecnología puede ser una alternativa para redes fijas de área local (LAN), no pretendereemplazar al sistema tradicional con cable. Solo lo complementa en situaciones en que es difícil
3
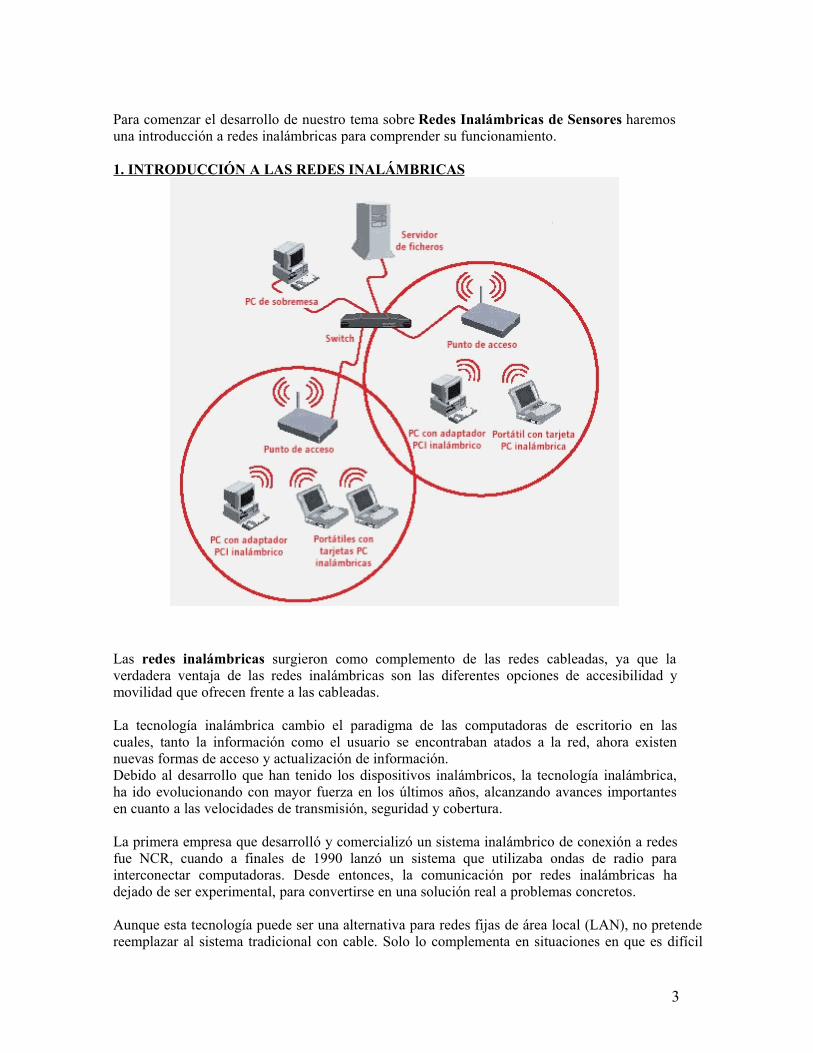
hacer una conexión. Por eso, precisamente, el primer componente de los sistemas inalámbricos esun bridge (puente) Ethernet que, conectado al cableado transporta la información hasta una antenaencargada de distribuirla a las PC. El aire actúa como medio de transmisión de las ondas quellegan de las antenas de cada computadora. Después pasa a las tarjetas de red, que tienen una salidapara una antena externa y un pequeño transmisor, encargado de recibir y enviar información hastael bridge. Ver figura 1 Las transmisiones inalámbricas constituyen una potente herramienta detransferencia de información, se emplean para comunicar estaciones de trabajo a través de ondas deradio o frecuencias de infrarrojo permitiendo la movilidad y flexibilidad del sistema en general.
Figura 1
2. MEDIOS DE TRANSMISIÓN INALÁMBRICOS
2.1 Microondas terrestres
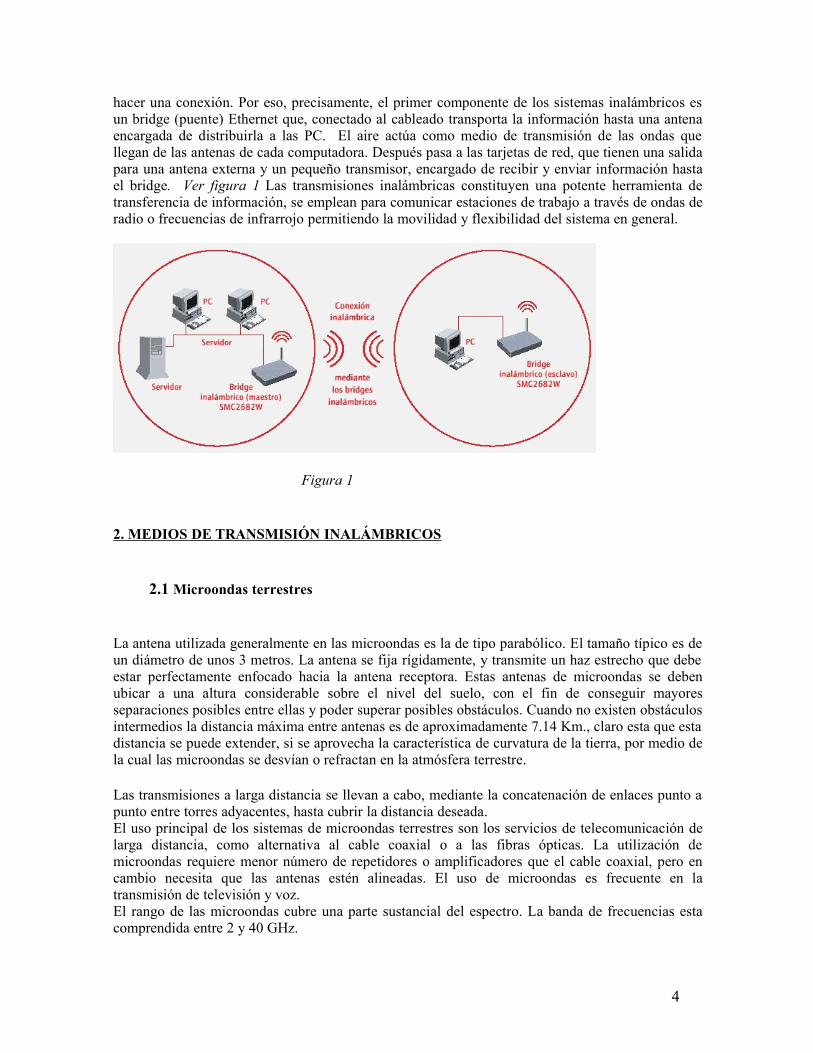
La antena utilizada generalmente en las microondas es la de tipo parabólico. El tamaño típico es deun diámetro de unos 3 metros. La antena se fija rígidamente, y transmite un haz estrecho que debeestar perfectamente enfocado hacia la antena receptora. Estas antenas de microondas se debenubicar a una altura considerable sobre el nivel del suelo, con el fin de conseguir mayoresseparaciones posibles entre ellas y poder superar posibles obstáculos. Cuando no existen obstáculosintermedios la distancia máxima entre antenas es de aproximadamente 7.14 Km., claro esta que estadistancia se puede extender, si se aprovecha la característica de curvatura de la tierra, por medio dela cual las microondas se desvían o refractan en la atmósfera terrestre.
Las transmisiones a larga distancia se llevan a cabo, mediante la concatenación de enlaces punto apunto entre torres adyacentes, hasta cubrir la distancia deseada.El uso principal de los sistemas de microondas terrestres son los servicios de telecomunicación delarga distancia, como alternativa al cable coaxial o a las fibras ópticas. La utilización demicroondas requiere menor número de repetidores o amplificadores que el cable coaxial, pero encambio necesita que las antenas estén alineadas. El uso de microondas es frecuente en latransmisión de televisión y voz.El rango de las microondas cubre una parte sustancial del espectro. La banda de frecuencias estacomprendida entre 2 y 40 GHz.
4

Cuanto mayor sea la frecuencia utilizada, mayor el ancho de banda potencial, y por consiguientemayor es virtualmente la velocidad de transmisión.
2.2 Microondas por satélite
A diferencia de las microondas terrestres, las microondas satelitales lo que hacen básicamente, esretransmitir información, se usa como enlace entre dos o más transmisores/receptores terrestres,denominados estaciones base. El satélite funciona como un espejo sobre el cual la señal rebota, suprincipal función es la de amplificar la señal, corregirla y retransmitirla a una o más antenasubicadas en la tierra.La transmisión satelital, puede ser usada para proporcionar una comunicación punto a punto entredos antenas terrestres alejadas entre si, o para conectar una estación base transmisora con unconjunto de receptores terrestres.Si dos satélites utilizan la misma banda de frecuencias y se encuentran lo suficientementepróximos, estos podrían interferirse mutuamente, por lo que es necesario que estén separados por lomenos 4 grados (desplazamiento angular medio desde la superficie terrestre), en la banda 4/6 GHz,y una separación de al menos 3 grados a 12/14 GHz, por tanto el número máximo de satélitesposibles esta bastante limitado.Las comunicaciones satelitales son una revolución tecnológica de igual magnitud que las fibrasópticas, entre las aplicaciones más importantes para los satélites tenemos: Difusión de televisión,transmisión telefónica a larga distancia y redes privadas entre otras. Una de las aplicaciones más recientes que se le ha dado al uso de satélites se denomina difusióndirecta vía satélite (DBS, Direct Broadcast Satellite), en la que la señal de vídeo se transmitedirectamente del satélite a los domicilios de los usuarios, esto se logra mediante la implantación deuna antena de bajo costo, en el domicilio de cada usuario, logrando así que la cantidad de canalesofrecidos aumente notablemente.La comunicación vía satélite se utiliza también para proporcionar enlaces punto a punto entre lascentrales telefónicas en las redes públicas de telefonía. El rango de frecuencias óptimo para la transmisión vía satélite esta en el intervalo comprendidoentre 1 y 10 GHz. Por debajo de 1 GHz, el ruido producido por causas naturales es apreciable,incluyendo el ruido galáctico, solar, atmosférico y el producido por interferencias con otrosdispositivos electrónicos.
2.3 Espectro infrarrojo (IR)
La zona de infrarrojos del espectro abarca en términos generales desde los 3 x 1011 hasta los 2 x1014Hz. Los infrarrojos son útiles para las conexiones locales punto a punto así como paraaplicaciones multipunto dentro de áreas de cobertura limitada como por ejemplo una habitación.Una diferencia significativa entre la transmisión de rayos infrarrojos y las microondas es que losprimeros no pueden atravesar paredes. Por lo tanto los problemas de seguridad y de interferenciasque aparecen en las microondas no se presentan en este tipo de transmisión. Es más, no hayproblemas de asignación de frecuencias, ya que en esta banda no se necesitan permisos. Por sunaturaleza y características de transmisión la tecnología infrarroja es utilizada en aplicaciones LAN(como las médicas o de inventario de almacenes), clientes conectándose en grandes áreas abiertas,impresión inalámbrica y la transferencia de archivos. La velocidad de transmisión máximaalcanzada hasta ahora es de 10 Mbps. La cobertura de este tipo de tecnología esta limitada a LAN oal un campo más amplio si se utilizan repetidores inalámbricos y puentes. Entre las ventajas quepodemos resaltar posee una mayor velocidad que las de amplio espectro, y es inmune a lainterferencia de fuentes de radiofrecuencia. Pero por el contrario de las otras tecnologías, como se
5
mencionó anteriormente la tecnología de espectro infrarrojo, no puede penetrar paredes y ademássu rango de alcance es bastante corto.
2.4 Transmisión por ondas de luz
La señalización óptica con láser es inherentemente unidireccional, de modo que cada punto acomunicarse necesita su propio láser y su propio fotodetector, este esquema proporciona un anchode banda muy alto y un costo muy bajo. También es relativamente fácil de instalar y, a diferenciade las microondas, no requiere de una licencia de la FCC (Comisión Federal de Comunicaciones).El láser posee una debilidad ya que a grandes distancia, requiere de una gran precisión,generalmente se le añaden lentes al sistema para desenfocar ligeramente el rayo.Otra desventaja de los rayos láser es que no pueden atravesar la niebla, ni la lluvia, normalmentefuncionan bien en los días soleados.
2.5 Ondas de radio
Las ondas de radio son fáciles de generar, pueden viajar distancias muy largas y penetrar edificiossin problema, de modo que se utilizan mucho en la comunicación tanto en interiores como enexteriores. Las ondas de radio también son omnidireccionales, lo que significa que viajan en todaslas direcciones desde la fuente, por lo que el transmisor y el receptor no tienen que alinearsefísicamente.Básicamente hay dos tipos de transmisiones inalámbricas:
2.5.1 Direccional.
También llamada sistemas de banda angosta (narrow band), donde la antena de transmisión emitela energía electromagnética en un haz. Las antenas de emisión y recepción deben estarperfectamente alineadas.Para que la transmisión pueda ser enviada en una dirección especifica, debemos tener en cuenta lafrecuencia, la cual debe ser mucho mayor que la utilizada en transmisiones omnidireccionales.
6

2.5.2 Omnidireccional
También llamados sistemas basados en espectro disperso o extendido (spread spectrum), alcontrario que las direccionales, el diagrama de radiación de la antena es disperso, emitiendo entodas direcciones, pudiendo la señal ser recibida por varias antenas.
7
3. CONFIGURACIÓN DE REDES INALÁMBRICAS
Las redes inalámbricas pueden ser configuradas en los siguientes entornos:
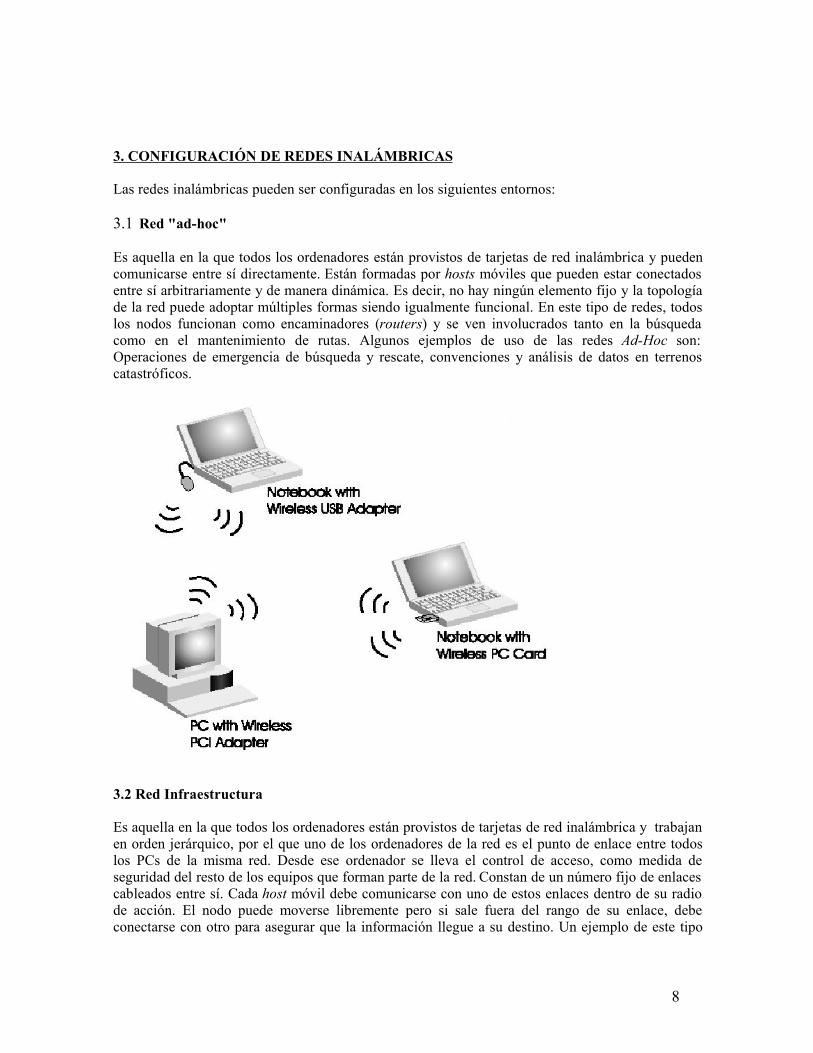
3.1 Red "ad-hoc"
Es aquella en la que todos los ordenadores están provistos de tarjetas de red inalámbrica y puedencomunicarse entre sí directamente. Están formadas por hosts móviles que pueden estar conectadosentre sí arbitrariamente y de manera dinámica. Es decir, no hay ningún elemento fijo y la topologíade la red puede adoptar múltiples formas siendo igualmente funcional. En este tipo de redes, todoslos nodos funcionan como encaminadores (routers) y se ven involucrados tanto en la búsquedacomo en el mantenimiento de rutas. Algunos ejemplos de uso de las redes Ad-Hoc son:Operaciones de emergencia de búsqueda y rescate, convenciones y análisis de datos en terrenoscatastróficos.
3.2 Red Infraestructura
Es aquella en la que todos los ordenadores están provistos de tarjetas de red inalámbrica y trabajanen orden jerárquico, por el que uno de los ordenadores de la red es el punto de enlace entre todoslos PCs de la misma red. Desde ese ordenador se lleva el control de acceso, como medida deseguridad del resto de los equipos que forman parte de la red. Constan de un número fijo de enlacescableados entre sí. Cada host móvil debe comunicarse con uno de estos enlaces dentro de su radiode acción. El nodo puede moverse libremente pero si sale fuera del rango de su enlace, debeconectarse con otro para asegurar que la información llegue a su destino. Un ejemplo de este tipo
8

de redes es la red de telefonía móvil formada por numerosas estaciones y antenas dispersas portodas las ciudades.
4. INTRODUCCION A LAS REDES INALAMBRICAS DE SENSORES
Dentro de las redes inalámbricas, podemos citar las redes de sensores inalámbricas WSN’s, éstasestán introduciéndose cada vez con más importancia tecnológica, se usan en una gran variedad deaplicaciones, tales como, monitorización ambiental, control de infraestructuras médicas, seguridadpublica, seguridad en el hogar y en la oficina, transporte y aplicaciones militares. Las redes inalámbricas de sensores WSN’s proporcionan redes distribuidas para acceder a lossensores, actuadores y procesadores dispuestos con equipamientos y entornos variables. Un WSN combina tecnologías de sistemas electrónicos, nuevos materiales para sensores, potenciade procesamiento de la señal, computadoras y bajo costo de las redes inalámbricas, formando unsistema compacto. Los avances durante la última década en circuitos integrados han facilitado la manufacturación desensores más potentes, permitiendo la producción en masa de sofisticados sistemas para conectar elmundo físico a la red de computadoras. El gran uso de WSN depende del diseño y desarrollo del factor a monitorear, del costo de lasarquitecturas de redes de sensores, de las aplicaciones necesarias para enviar información desde lossensores a los usuarios o entidades de red, tratando siempre de obtener a un bajo bit-rate utilizandouna baja potencia de transmisión.
5. CARACTERÍSTICAS DE LAS REDES DE SENSORES
Las redes de sensores poseen como partes principales: sensor, observador y fenómeno.El sensor es el dispositivo que monitorea un fenómeno físico del ambiente y genera informes conlas medidas realizadas (a través de la comunicación inalámbrica). Un sensor produce una respuestamensurable de los cambios de las condiciones físicas, tales como temperatura, campo magnético oluz. Se pueden construir muchos modelos diferentes, de acuerdo a la necesidad, al uso ydependiendo de las características de los dispositivos. En la mayoría de los modelos de dispositivossensoriales la capacidad de detención disminuye con el aumento de la distancia del sensor al
9
fenómeno y mejora con el aumento del tiempo que el sensor está expuesto para recoger lainformación.Un sensor, consiste típicamente en cinco componentes: detector del hardware, de la memoria, de labatería y el procesador emisor- receptor.El observador es el usuario final interesado en conseguir la información diseminada por la red desensores en relación a un fenómeno. Puede realizar consultas a la red y recibir respuestas de estas.Además, pueden existir, simultáneamente, observadores múltiples en la red de sensores.El fenómeno es la entidad de interés para el observador, que esta siendo monitoreada y cuyainformación será analizada/filtrada por la red de sensores. Se pueden observar múltiples fenómenossimultáneamente. El observador está interesado en monitorizar el comportamiento del fenómenobajo algún requisito de desempeño específico (por ejemplo, precisión o latencia). En una red desensores típica, los sensores individuales muestran los valores medidos y luego se separa lainformación, cuando es necesario, para otros sensores y eventualmente para el observador.
6. DEFINICIONES DE REDES DE SENSORES
Una WSN se dice que es homogénea cuando todos los nodos tienen el mismo hardware, en otrocaso será heterogénea. Los nodos son autónomos cuando son capaces de ejecutar ellos mismos las tareas de configuración,sin intervenciónl humana. Una WSN es jerárquica, cuando los nodos son agrupados por plataformas. En una red jerárquica,es común tener una estación base que trabaje como un puente hacia otras estaciones externas. Un WSN es estática cuando los nodos son estacionarios, siendo dinámica en caso contrario. Podemos observar que la topología puede ser dinámica igual cuando los nodos son estacionarios,ya que unos nuevos nodos pueden ser añadidos a la red o existiendo nodos que llegan a serindispensables. Una WSN es simétrica cuando cada transmisor tiene el mismo rango de transmisión y asimétricocuando no. Un WSN es continua cuando los nodos sensores recogen datos y envían esos datos a unobservador continuamente, sin embargo, son demandantes cuando ellos responden a las preguntasde los observadores. Un WSN es reactivo cuando los nodos sensores envían datos referentes a eventos ocurridos en elmedio y programados cuando los nodos recogen datos de acuerdo a las condiciones definidas porla aplicación Una WSN es híbrida, cuando tiene al menos dos características de las anteriores.
7. MEDIDAS DE DESEMPEÑO
Las medidas para evaluar los protocolos de las redes de sensores son: Eficiencia del uso de laenergía y de la vida útil del sistema, latencia, precisión, tolerancia a fallas, la escalabilidad y laexposición de los sensores.
7.1 Eficiencia del uso de la energía y de la vida útil del sistemaComo los sensores son operados por baterías, los protocolos deben ser eficientes en el uso de laenergía para maximizar la vida útil del sistema. Dicha vida útil del sistema se puede medir porparámetros genéricos, como el tiempo activo o el tiempo de envío de la información a la aplicación.En vista del problema de la eficiencia en el uso de la energía, fue creado el protocolo S-MAC(Sensor-Medium Access Control). Lo que se busca es que los sensores se pongan rápidamenteactivos cuando se detecta un cierto fenómeno. Este protocolo utiliza técnicas para reducir elconsumo de energía y soportar los sensores que permanecen mucho tiempo inactivos en la red.
10

La energía es un recurso crítico en una WSN, de este modo todas las operaciones deberían sereficientes en cuanto al consumo de esta.
7.2 Latencia y precisiónLa latencia se refiere, al intervalo de tiempo entre el instante en que el sensor recoge el dato y elmomento en que se decide cual es el destino, dentro de la red, por ejemplo puede ir desde los sink-nodes a otro y desde los sink-nodes al observador.El observador esta interesado en estudia el fenómeno dentro de un espacio de tiempo (latencia). Porlo tanto, la semántica necesaria de latencia depende del fenómeno y de la aplicación sobre elfenómeno. Obtener información de precisión es el objetivo principal del observador, y dichaprecisión va a estar determinada por la aplicación.
7.3 Tolerancia a fallasLos sensores puede fallar debido a las malas condiciones físicas o cuando su batería se estéacabando. Como el intercambio de los sensores existentes puede ser difícil es necesario que la redsea tolerante a fallas. Dicha tolerancia se puede alcanzar con la replicación de los datos, sinembargo, la respuesta de éstos requiere energía. Un ejemplo que podemos citar de la replicación esel protocolo SPIN (Sensor Protocols for Information via Negotiation). Estos comprenden unafamilia de protocolos adaptativos para difundir la información en las redes de sensores. Cuandoejecutamos el protocolo SPIN, utiliza datos de alto nivel, llamados metadatos. Existen 4protocolos SPIN: SPIN-PP y SPIN-EC, que se utilizan para una red punto a punto y SPIN-BC ySPIN-RL, que se utilizan para una red broadcast. Los resultados encontrados en la comparación deprotocolos SPIN con otros mecanismos posibles, indican que los protocolos SPIN pueden enviar el60% más de datos para cierta cantidad de energía que los mecanismos convencionales en una redpunto a punto y el 80% en una red broadcast.
7.4 ExactitudIndica la exactitud de la red frente a los resultados, puede definirse como la división entre losresultados validos y todos los resultados obtenidos. Los factores que condicionan el medio cuandolos datos son obtenidos y comunicados pueden degradar la exactitud.La aplicación juega un papel importante en las medidas ya que es responsable en el incremento deenergía gastado en obtener los datos. Como consecuencia, la red debería adaptarse a la medida deexactitud definida por la aplicación de acuerdo al más alto nivel de latencia permitido.
7.5 EscalabilidadLa escalabilidad en la redes de sensores es también un factor crítico. Para las redes de gran escala,son comunes las interacciones de jerarquía y la agregación, es por eso que es crítico asegurar laescalabilidad del sistema.
7.6 Exposición de los sensoresLas redes de sensores tiene el potencial de proporcionar la interfaz entre el mundo físico e Internet,admitiendo una gran cantidad de usuarios. La calidad del servicio debe ser expresada en lostérminos de la precisión y/o de la latencia cuando se observa un acontecimiento en el mundo físico.Por lo tanto, uno de los problemas básicos en las redes de sensores es la capacidad que tengan estosde detectar objetos. La exposición se puede definir como la medida de cómo una red de sensorespuede observar un objeto, moviéndose de una manera arbitraria, en un determinado período detiempo. Existen algoritmos que permiten calcular la exposición mínima necesaria.
8. ARQUITECTURA
11
Una red de sensores es una herramienta para medir y pasar información sobre un fenómeno a unobservador dentro de los límites de desempeño deseados y con el mejor costo/beneficio posible. Espor eso que la red se debe organizar de la siguiente forma: infraestructura, protocolo de la red yaplicación.La infraestructura consiste en los sensores y la forma de cómo utilizarlos. Más específicamente,la infraestructura es influenciada por el número de sensores, por las características de ellos(precisión de la detención, tamaño de la memoria, vida útil de la batería, extensión de latransmisión) y la estrategia de utilización (cantidad, localización y movilidad del sensor).El protocolo de red es el responsable de crear caminos y de realizar la comunicación entre lossensores y el observador(es).La aplicación depende del interés que tenga un observador en un fenómeno y se expresa por mediode las consultas realizadas con respecto al fenómeno. Para contestar a las consultas se proporcionanlos datos distribuidos captados por los sensores. Estas consultas pueden ser estáticas (cuando lossensores se programan para divulgar los datos de acuerdo con un estándar específico) o dinámicas. Es posible realizar optimizaciones en cualquiera de los tres niveles para mejorar el funcionamiento.El protocolo en una red, es el responsable de brindar soporte a toda la comunicación, entre sensoresy a su vez, entre sensores y observadores. El funcionamiento del protocolo esta altamenteinfluenciado por el dinamismo de las redes, así como por el modelo construido para enviar datosespecíficos. Para determinar como se comporta el protocolo de red en diversas situaciones,debemos clasificar ciertas características. Intuitivamente, para un dado tipo de sensor, aumentar elnúmero de sensores en el campo tendría que dar lugar a un mejor funcionamiento en la red,considerando que: (i) la precisión de monitorización debería aumentar, ya que hay mas sensorespara captar el fenómeno; (ii) la disponibilidad de la energía dentro de la red aumentaría y (iii) ladensidad del sensor adicional ofrecería el potencial para una red mejor conectada con caminos máseficientes entre los sensores y los observadores.Sin embargo, aumentar el número de sensores da lugar a mayores reportes de resultados en unamisma unidad del tiempo. Si el aumento de la carga excede la capacidad de la red en términos delacceso a una red inalámbrica compartida, y genera la congestión en puntos intermedios, se puededecir que, un aumento del número de activos puede afectar el funcionamiento de la red. En cuanto ala capacidad, el problema se puede considerar en términos de la colisión y de la congestión. Paraprevenir colisiones, los sensores que están en la extensión de la transmisión hacia otros sensores,no deben transmitir simultáneamente. Además, debemos saber que no todos los sensores soniguales en términos de precisión: dependiendo de la localización, un sensor específico puede teneruna mejor calidad de datos o una combinación de sensores puede proveer de una precisión másgrande que otra.En cuanto a la perspectiva de la red, la precisión depende de factores como localizacionesgeográficas de los sensores que generan informes, el tamaño del buffer y el tiempo deprocesamiento de paquetes.En las redes de sensores, la infraestructura en términos de la capacidad de la detención del sensor,el número de sensores y la estrategia de uso eficiente demuestran una significativa influencia en ladeterminación del funcionamiento de la red.
Los nodos con sensores en WSN extendidos sobre una región se comunican entre ellos mismosusando comunicación inalámbrica punto-punto, posiblemente formando una red ad-hoc.
12

Esta figura muestra una sencilla red Ad-hoc. El nodo origen quiere enviar un paquete al nododestino, pero éste está fuera del alcance de su sistema de transmisión (representado por círculosen la figura). Es necesario que los nodos intermedios formen parte del juego y retransmitan elpaquete desde origen hasta destino. En el ejemplo, el camino por el que viaja el paquete de datosestá representado por flechas.
Los sensores recogen, procesan y envían los datos observados desde el medio a otros nodos.Básicamente hay tres tipos de nodos:
1. Nodos ComunesResponsables de ir coleccionando y enviando los datos.2. Sink-nodosResponsables de ir recibiendo, almacenando y procesando los datos desde los nodoscomunes.3. Nodos-gatewayQue conectan Sink-nodos a entidades externas que permitan el control o actuaciones sobreun área de monitorización.
9. MODELOS DE COMUNICACIÓN
Hay diversas maneras para que una red de sensores alcance los requisitos de precisión. Una redbien proyectada alcanza estos requisitos optimizando el uso de la energía de los sensores yproporcionando tolerancia a fallas. Estudiando los estándares de la comunicación, el diseñador deuna red puede ser capaz de elegir la infraestructura y los protocolos de comunicación queproporcionen la mejor combinación de desempeño, robustez, eficiencia y el menor costo posible.Conceptualmente, la comunicación en una red de sensores se puede clasificar en dos categorías:aplicación e infraestructura. El protocolo de red debe soportar estos dos tipos de comunicación.La comunicación de aplicación se relaciona con la transferencia de los datos monitoreados (o de lainformación conseguida de ellos) con el objeto de informar al observador sobre el fenómeno. La infraestructura de la comunicación se refiere a la comunicación necesaria para configurar,mantener y optimizar la operación. Más específicamente, debido a la naturaleza ad- hoc de lasredes de sensores, ellas deben ser capaces de descubrir los caminos para comunicarse con otrossensores apropiados y con el observador. La infraestructura de la red es necesaria para mantener elfuncionamiento de la misma, asegurando la robustez de las operaciones en ambientes dinámicos yoptimizando el desempeño global.Además, una infraestructura de comunicación esta altamente influenciada por la aplicaciónrequerida, ya que las redes deben ser auto-reconfigurables para poder satisfacer correctamente lorequerido.La infraestructura de la comunicación es generada por el protocolo de la red en respuesta a losrequerimientos de aplicación o eventos en la red.
13
9.1 Modelos de envío de datosLas redes de sensores se pueden clasificar en relación con el envío de los datos requeridos por elusuario. Pueden ser clasificadas como: continua, orientada al evento, iniciada por el observador ehíbrida.En el modelo continuo los sensores comunican continuamente sus datos a una tasa previamenteespecificada.En el modelo de datos orientado a eventos, los sensores envían la información solamente si ocurreun acontecimiento de interés. En este caso, el observador está interesado en la ocurrencia de unfenómeno específico o de un conjunto de fenómenos determinados.En el modelo iniciado por el observador (o request-replay) los sensores divulgan solamente susresultados en contestación a una solicitación explícita del observador (ya sea directamente, oindirectamente a través de otros sensores).En el modelo híbrido las tres estrategias coexisten en la misma red.En los modelos citados, se clasifican los ruteamientos como: el flooding (basado en broadcast), elunicast, y el multicast.Usando una estrategia de flooding, los sensores realizan un broadcast de su información para susvecinos, que realizan un nuevo broadcast de estos datos hasta alcanzar al observador. Estaestrategia puede causar altos gastos indirectos, pero es inmune a los cambios dinámicos en latopología de la red.Alternativamente, los sensores se pueden comunicar directamente con el observador o con uncluster-head, usando un mensaje unicast.En la estrategia multicast, los sensores forman grupos de acuerdo con la aplicación y utilizan elmulticast para la comunicación entre los miembros del grupo. El observador puede comunicarsecon cualquier miembro del grupo para conseguir los datos deseados. La desventaja más grande delflooding o broadcast es la necesidad de un protocolo complejo en la capa de red para el ruteamientoy el gerenciamiento de localización.
9.2 Modelos dinámicos de red
Una red de sensores forma un camino entre el fenómeno y el observador. El objetivo del protocoloen la red de sensores es crear y guardar este camino o caminos bajo condiciones dinámicas.Además, deben encontrar los requerimientos de uso de la energía y baja latencia, alta precisión ytolerancia a fallas.Existen diversas estrategias para construir y mantener un camino entre el observador y elfenómeno, que difieren dependiendo de la dinámica de la red. Se clasifican como: redes desensores estáticas y redes de sensores móviles. La movilidad, la imperfección del sensor y elcambio del interés del observador son fuentes de condiciones dinámicas.Redes de sensores estáticasEn este tipo de red no hay movimiento entre los sensores que se comunican, entre los observadoresy el fenómeno. Un ejemplo es un grupo de sensores separados para supervisar temperatura. Paraestos tipos de redes de sensores, se utilizan algoritmos locales. Los sensores en los algoritmoslocales se comunican entre sí. Luego, un nodo local transmite un resumen de los comentarioslocales para el observador, pudiendo ser implementado en uno o más niveles de la jerarquía.Redes de sensores dinámicasEn las redes de sensores dinámicas, los sensores, el observador y/o el fenómeno son móviles.Siempre que cualquiera de los sensores asociados a un camino entre el observador y el fenómeno semueve, el camino puede fallar. En este caso, el observador o el sensor deben iniciar lareconstrucción de un nuevo camino. Durante la fase de la configuración inicial el observador puedeconstruir múltiples caminos entre él y el fenómeno y colocarlos en Cache, eligiendo uno que seamás beneficioso en ese momento. Si este camino falla, otro camino que estará en Cache puede serutilizado. Si todos los caminos en Cache son inválidos, el observador debe construir nuevos
14
caminos. La estrategia iniciada por el observador (observador-iniciador) es una estrategia reactiva,donde la acción recuperar el camino se lleva a cabo solamente después de observar unaimperfección.Otro modelo para reconstruir nuevos caminos entre el observador y el fenómeno es una estrategiainiciada por el sensor (sensor-iniciador). En este procedimiento la recuperación del camino esiniciada por el sensor, este, realiza un procedimiento para construir un nuevo camino enviando unbroadcast para todos los sensores vecinos, solicitando la participación para el flujo lógico de losdatos. Los sensores vecinos envían una contestación indicando la disponibilidad para formar partedel nuevo camino. Si ningunos de los sensores vecinos contesta, el sensor/iniciador envía unarespuesta de anulación del camino al observador.Así, el observador puede comenzar a construir un nuevo camino. Esta estrategia iniciada por elsensor es una estrategia favorable-activa por que las operaciones de la recuperación del camino seinician con anticipación a una falla futura del mismo.Las redes de sensores dinámicas pueden ser clasificadas de acuerdo al movimiento de loscomponentes (sensores, observador, fenómeno). Para cada movimiento de los componentes existeuna infraestructura diferente y protocolos.A continuación describiremos las situaciones donde uno de los componentes tiene movilidad.El observador es móvil con respecto a los sensores y el fenómeno. Un ejemplo de este es el uso desensores en un área hospitalaria para monitorizar el ambiente. Otro ejemplo, es un aeroplano quevuela en un campo periódicamente para recoger la información de una red de sensores, de estamanera el observador esta en movimiento en el aeroplano y los sensores y el fenómeno quietos enel suelo.En el caso de sensores móviles, podemos citar por ejemplo, la monitorización del tráfico a través desensores dispuestos en los taxis.En el caso de un fenómeno móvil, un ejemplo típico son los sensores usados para monitorizaranimales.
10. ANALISIS DE LOS PROTOCOLOS EXISTENTES PARA REDES DE SENSORES
Los protocolos de ruteamiento ad-hoc se pueden utilizar como protocolos para las redes desensores. Sin embargo, estos protocolos, no son generalmente buenos candidatos para las redes desensores por las siguientes razones: (i) los sensores tiene baja carga de batería y disponibilidad bajade la memoria; (ii) el tamaño de la tabla de ruteamiento crece con el tamaño de la red; (iii) estasredes se proyectan para comunicaciones de extremo a extremo y reaccionan inapropiadamente sitiene movimiento; (iv) sus solicitaciones de direccionamiento pueden ser inapropiadas para lasredes de sensores.Dentro de los protocolos utilizados podemos mencionar:El LEACH es un protocolo eficiente en el uso de energía para las redes de sensores que sonproyectadas con el mecanismo de envío continuo de datos y sin movilidad. El LEACH utiliza una arquitectura clustering donde los miembros envían sus datos hacia unacluster-head local, luego agregan datos de cada sensor y envían la información a un Clusterheads. El LEACH se puede utilizar para las redes donde los nodos envían datos en intervalos regulares.Pero se lo debe ampliar para poder ser utilizados en modelos dirigidos y para sensores móviles.La difusión dirigida (DD) es un protocolo datacentric, el cual no difunde los datos en la red perosí los datos que monitoriza. Los datos son nominados por pares de atributovalor. En la difusióndirigida el interés expresado por los observadores a través de una consulta se difunde por la redusando interacciones locales. Una vez que un nodo sensor (nodo fuente) satisface la consulta, estenodo comienza a retransmitir los datos a un nodo inferior usando otra vez, interacciones locales.El modelo publish/subscribe tiene un modelo de comunicación típicamente anónima,intrínsecamente asincrónica y multicast por naturaleza. Del punto de vista del uso, el modelo
15

publish/subscribe captura la relación entre el observador y el fenómeno para algunos usos. En estemodelo la comunicación no es extremo a extremo, sino anónima con la formación del multicastespecífico del grupo de aplicación. En lo referente a la puesta en práctica, la comunicaciónasincrónica ayuda a preservar energía y a aumentar la vida útil de la red.
11. SEGURIDAD EN REDES DE SENSORES
Para que una red de sensores provea seguridad son necesarios los siguientes requisitos:Confidencialidad de los datos: una red de sensores no debe dejar que cierta información seatransmitida a las redes vecinas. Una estrategia para mantener los datos de manera confidencial escriptografiar los datos con una llave privada que solo la posee el receptor, garantizando laconfidencialidad.Autentificación de datos: la autentificación de mensajes es importante para muchas aplicacionesen las redes de sensores, principalmente para las funciones administrativas, como por ejemplo,reprogramación de la red. El receptor necesita asegurar que los datos usados en cualquier procesode decisión se originen de una fuente correcta. En el caso de la comunicación en dos partes, laautentificación de los datos se puede alcanzar a través de un mecanismo simétrico, donde elremitente y el receptor comparten una llave privada para computar un código de autentificación delmensaje (MAC-Message Authentication Code) de todos los datos comunicados. Cuando unmensaje con un código de autentificación correcto llega el receptor, este conoce al emisor queenvió el mensaje. Este estilo de autentificación no es seguro para ser aplicado en broadcast.Integridad de los datos: en la comunicación, la integridad de los datos asegura al receptor que losdatos recibidos no fueron modificados durante su tránsito. La integridad de datos es alcanzada porla autentificación de los datos.Datos recientes: Garantizar que los datos son recientes implica asegurar que no existe interferenciade viejos mensajes. Esto se puede garantizar a través del ordenamiento parcial de los mensajes,pero sin causar retraso de la información (usada para la medida de sensores).
Para atender las condiciones de seguridad de las redes de sensores existe un sistema de protocolosde seguridad para redes de sensores SPINS (Security Protocols for Sensor Networks). Losprotocolos SPINS tienen dos bloques constitutivos: SNEP (Secure Network Encryption Protocol) ymTESLA (una versión de Timed, Efficient, Streaming, Losstolerant Authetication Protocol). Elprotocolo SNEP provee confidencialidad de los datos, autentificación de datos en dos grupos y laactualización de los mismos. Un problema particularmente difícil es proveer la autentificacióneficiente en broadcast.El mTESLA es un mecanismo importante para las redes de sensores, es un nuevo protocolo queprovee broadcast autentificado para diversos ambientes de recursos restrictos. Sin embargo, en muchos usos de redes de sensores, la red puede ser puesta ante una situacióndonde un intruso puede modificar la función de la red. Un intruso puede ser capaz de posicionarsedentro de la red y utilizarla para transmitir mensajes falsos, o comprometer el funcionamiento de unnodo de la red y obtener el acceso a su información principal.
12. ESTANDAR IEEE 1451
El desarrollo y la rápida aparición de tecnologías de redes de sensores han establecido una red detransductores inteligentes (los sensores y los actuadores) que brindan una solución económica yatractiva para una amplia gama de aplicaciones y el control. Sin embargo, con la multiplicidad de las especificaciones incompatibles de la red se ha creado uncierto grado de confusión, esta confusión ha impuesto carga económica innecesaria a los usuarios ya los vendedores de transductores de redes. En vista de esta situación el comité técnico sobre la
16

tecnología de sensor del IEEE ha patrocinado una serie de proyectos, señalada como IEEE P1451,para tratar el desarrollo de una familia de estándares de interfaces inteligentes para lostransductores que conectan a las redes. Con estas interfaces estandardizadas, los productores de transductores pueden diseñar susdispositivos en un solo sistema de especificaciones para la conectividad de las redes.
La familia 1451 Existen cuatro estándares 1451,1/ 1451,2/ 1451,3 y 1451,4 de la tecnología de sensores. Un diagrama que demuestra la relación de la familia de estándares se demuestra en el cuadrosiguiente:
17
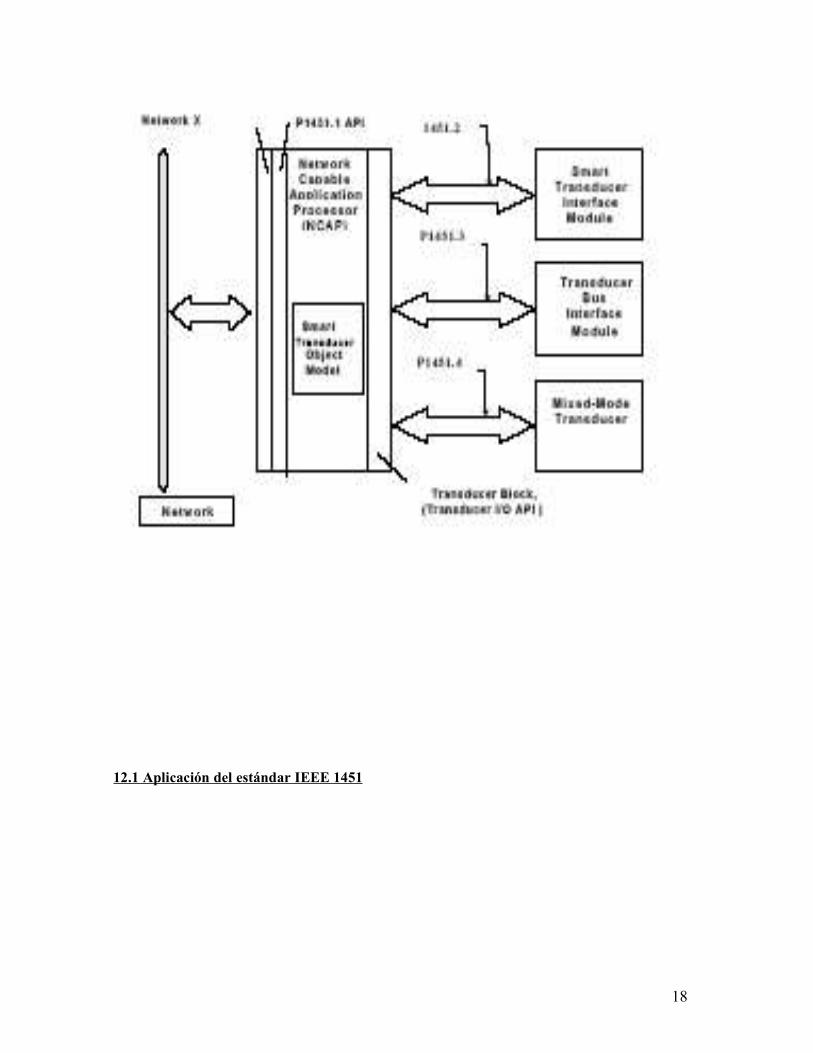
12.1 Aplicación del estándar IEEE 1451
18
A continuación desarrollaremos cada una de las aplicacionesdescriptas en el cuadro:
12.1.1 Aplicación remota (Remote Monitore Application)
Utilización de la aplicación remota
Cuando un NCAP está conectado con un STIM que consistesolamente en un sensor o sensores, los parámetros físicos que sonmedidos se pueden supervisar remotamente a través del NCAP quepuede enviar los datos a través de la red. Cualquier estación delmonitor conectada con la red puede supervisar los parámetros, y lared puede incluso ampliarse a Internet.
Un ejemplo de aplicación remota
Un NCAP conectado solamente con el sensor STIMs puederealizar funciones de supervisión remota del proceso o decondición tales como supervisión del nivel de la vibración de unsistema de cojinetes en una turbina de una nave, o supervisión de latemperatura de un baño de agua en una industria química a través deInternet.
12.1.2 Control distribuído (actuación basada en la medidalocal) (Distributed control)
Utilización del control distribuido
Se utiliza un STIM que contiene transductores de tipo sensor y actuador, estos estánconectados a un Procesador (NCAP) conectado a la red. El STIM puede realizar funcioneslocales de medición y de control según lo pedido por el NCAP en cualquier puerto de lared.
Un ejemplo del control distribuido
19
Los sensores y los actuadores conectados con el STIM de un NCAP pueden realizar unafunción de control localizada como mantener la temperatura constante de un baño, lapresión constante de un sistema hidráulico o el flujo constante de un líquido en un tubo. ElNCAP divulga datos medidos, el estado de procesamiento de la información y del control aotro NCAP(s), situado en una estación alejada.
12.1.3 Actuación Remota (Remote Actuating)
Utilización de la actuación por telecontrol
La actuación alejada ocurre cuando el uso del Procesador (NCAP) está conectado con unSTIM que consiste solamente en actuadores, es decir un actuador STIM. Proporciona unmecanismo permitiendo la manipulación alejada de los actuadores a través de la red en lacual el NCAP está conectado.
Un ejemplo de la actuación por telecontrol
NCAPs conectados solamente con un actuador STIM, reciben los datos de la difusiónproveniente de otro NCAPs, de esta manera activa una alarma cuando el nivel de lavibración de los cojinetes en una turbina en una nave excede un punto de ajuste crítico, oenvían una advertencia cuando la temperatura de un baño de agua en una pileta químicaalcanza una temperatura crítica (etc).
12.1.4 Medida y control de colaboración (Collaborative measurement and control)
Utilización de medición y control de colaboración
La medición y el control de colaboración se produce cuando 2 o más (NCAPs) estánconectados con un sensor STIM y actuador STIM, estos pueden hacer medidas yoperaciones de control alejadas en colaboración, comunicándose el uno con el otro através del NCAPs .
Un ejemplo de la medida y del control de colaboración
Un ejemplo de medición y control en colaboración sería la regulación de la temperatura deun horno en alguna parte del país. Se utilizaría un NCAP con un sensor STIM para medir la
20
temperatura arriba y después para controlar la operación de un horno abajo. El sensorSTIM/NCAP enviaría la información de la temperatura al actuador STIM/NCAP según lomandado. Un punto de ajuste sería fijado en el actuador STIM/NCAP. Cuando latemperatura alcanza el punto de ajuste, el actuador STIM/NCAP regularía el horno paraproporcionar calor a través del hogar. El sensor múltiple STIMs/NCAPs y actuadorSTIMs/NCAPs se puede utilizar para el control en distintas zonas de un horno o paraoperaciones más eficientes. Como por ejemplo, estos NCAPs se pueden conectar vía unared de área local (LAN) como Ethernet, y todas las operaciones se pueden supervisarremotamente a través de Internet.
Para comprender mejor estas aplicaciones detallaremos algunos conceptos sobre NCAP,sensor STIM, y sensor/actuador STIM:
NCAP
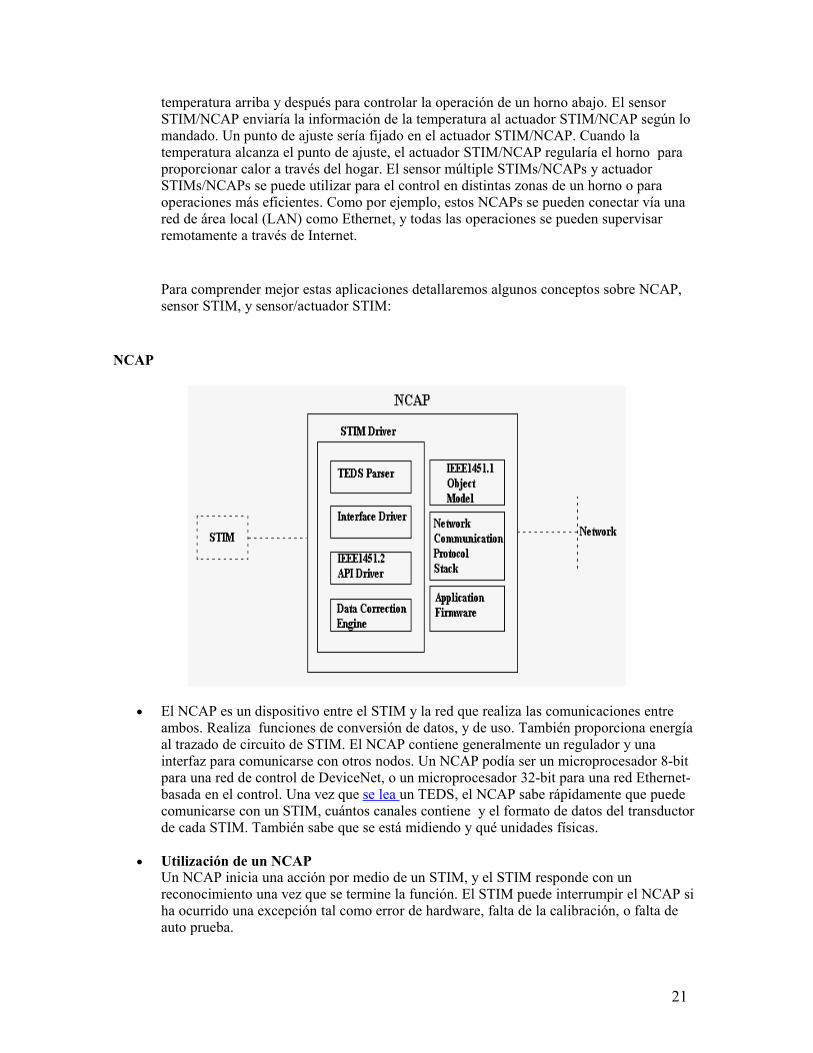
El NCAP es un dispositivo entre el STIM y la red que realiza las comunicaciones entreambos. Realiza funciones de conversión de datos, y de uso. También proporciona energíaal trazado de circuito de STIM. El NCAP contiene generalmente un regulador y unainterfaz para comunicarse con otros nodos. Un NCAP podía ser un microprocesador 8-bitpara una red de control de DeviceNet, o un microprocesador 32-bit para una red Ethernet-basada en el control. Una vez que se lea un TEDS, el NCAP sabe rápidamente que puedecomunicarse con un STIM, cuántos canales contiene y el formato de datos del transductorde cada STIM. También sabe que se está midiendo y qué unidades físicas.
Utilización de un NCAP
Un NCAP inicia una acción por medio de un STIM, y el STIM responde con unreconocimiento una vez que se termine la función. El STIM puede interrumpir el NCAP siha ocurrido una excepción tal como error de hardware, falta de la calibración, o falta deauto prueba.
21

Un NCAP se puede utilizar como regulador del nodo en una red de nodos múltiples. Puedecomunicarse con otros nodos de NCAP vía el protocolo client/server o el protocolo depublish/subscribe.
Sensor STIM
Diagrama detallado de un sensor STIM. .
Un STIM es un módulo que contiene TEDS , que es la lógica para poner el interfaz deltransductor en ejecución, y realizar cualquier conversión de la señal o condicionamientode la misma. Contiene de 1 a 255 sensores o actuadores en cualquier combinación DAC ,ADC y Digital. También traza el circuito de conversión, la lógica de la dirección, y laelectrónica digital para convertir las lecturas del sensor en forma digital, o para convertirsalida digital y de esta manera manejar a los actuadores desde la red. A través del sensor deNCAP los datos se pasan a una red. Cuando un STIM contiene más de un transductor, sepuede utilizar un STIM de varios canales o un STIM multivariable.
Cuando la energía se aplica al STIM, la información que lleva adentro el TEDS se pone adisposición del NCAP para el uso local, y para la distribución al resto de la red cuando seanecesario. Una vez que se lea el TEDS, el NCAP sabe rápidamente que puede comunicarsecon el STIM, cuántos canales el STIM tiene, y el formato de datos de cada canal. Puedeentonces enviar la información al STIM, o pedirle al sensor que realice una lectura opuede conseguir información sobre lecturas del sensor.
Un STIM que contiene unos o más sensores sería llamado un sensor STIM. Si el sensor esuna temperatura, una presión o un sensor de flujo, se llama temperatura, presión o flujoSTIM respectivamente.
Para tomar una lectura del sensor se realizan los siguientes pasos:
1. Seleccionar el canal (el sensor que será utilizado)
22
2. Accionar el sensor.
3. Esperar hasta que el STIM indica que la lectura está disponible.
4. Acceder a la lectura cruda del sensor.
5. Convertir la lectura cruda del sensor en unidades del SI usando las constantes de lacalibración almacenadas en el TEDS.
Un sensor STIM se puede utilizar para tomar medidas de cualquier tipo con sensoresanálogos apropiados, tales como presión, temperatura, flujo de aire, volumen, y sensoresdigitales de entrada como los interruptores.
Sensor/Actuator STIM
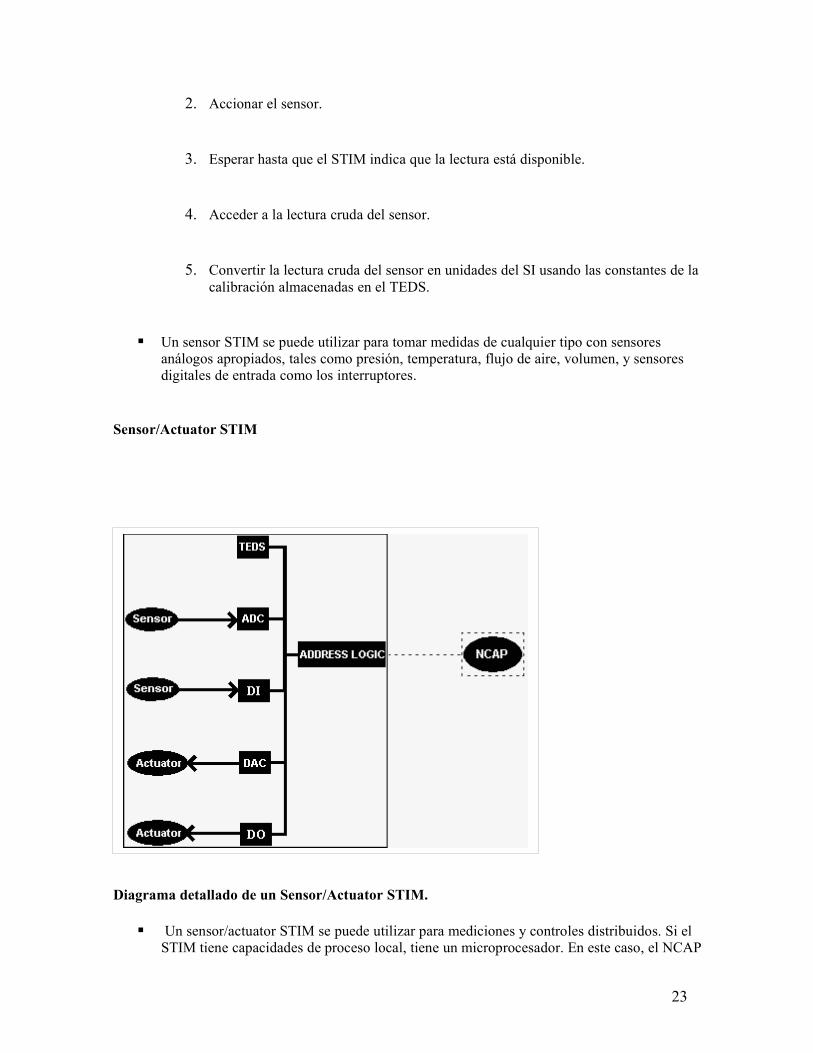
Diagrama detallado de un Sensor/Actuator STIM.
Un sensor/actuator STIM se puede utilizar para mediciones y controles distribuidos. Si elSTIM tiene capacidades de proceso local, tiene un microprocesador. En este caso, el NCAP
23
dirige remotamente el control de un proceso, que localmente es controlado por el STIM. ElSTIM utiliza los sensores para medir las variables y los parámetros del proceso, de acuerdocon las entradas del sensor, los puntos de control preestablecidos y los algoritmos decontrol.
13. BIBLIOGRAFIA
G. COLOURIS, J. DOLLIMORE, TIM, KINDBERG, Sistemas Distribuidos,Conceptos y Diseño, Tercera edición, Editorial Addison Wesley, 2001.
Sitios Web:www.aulir.com www.baluma.comwww.casadomo.com/revista_domotica_redeshttp://ccc.inaoep.mx http://gsyc.escet.urjc.eshttp://ieee1451.nist.govwww.infoser.cl/eredes.phphttp://magnum.ime.uerj.brwww.microsoft.com/latam/windowsxp/pro/biblioteca
24