
Planta 1: Calle San Aurelio Mz. K1 Lote. 11B – Urb. Villa ...
UNIVERSIDAD SIMÓN BOLÍVAR
DPTO. DE TECNOLOGÍA INDUSTRIAL
GUÍA DE SISTEMAS DE CONTROL TI-2233
Prof. Alexander Hoyo http://prof.usb.ve/ahoyo
2
ÍNDICE Pág.
TRANSFORMADA DE LAPLACE 3
TRANSFORMADA INVERSA DE LAPLACE Y ECUACIONES DIFERENCIALES
5
SIMPLIFICACIÓN DE DIAGRAMAS EN BLOQUES 10
ANÁLISIS DE ERROR EN ESTADO ESTACIONARIO ESS 12
SISTEMAS DE 2DO ORDEN 16
ANÁLISIS DE ESTABILIDAD 20
DISEÑO DE CONTROLADORES 23

3
TRANSFORMADA DE LAPLACE
1. Para cada función temporal, determine la Transforma de Laplace
correspondiente:
a. )cos(2
1)(sen
2
1
2
1)( tetetf
tt −− −−=
b. tteettf
3
18
5
2
5
9
25
3
10)(
−− ++−=
c. )(sen)( φ+= wttf , Sugerencia: )(sen)cos()cos()(sen)(sen bababa +=+
d. )12cos()(4.0 tetf t−=
e. )3
4()(π
+= tsentf
f. atettf −= 2)(
g. btat BeAetf −− +=)(
h. [ ])2(2)(4)(3 tseneettf tt −− ++= δ
i. ( ) )(124)(2 tutttg −+=
2. Para cada F(s) determine la función del tiempo correspondiente:
a. )10(
)5(10)(
+
+=
ss
ssF
b. )4(
)2(10)(
2 +
+=
ss
ssF
c. 256
25)(
2 ++=
sssF
d. 2
)4(
)1(5)(
+
+=
ss
ssF
e. )1(
)1()(
2 +
−=
ss
ssF
f. )3)(2(
)1(5)(
++
+=
ss
ssF

4
g. )5)(1(
6)(
++=
sssF
h. )2(
1)(
−=
sssF
i. )1(
1)(
2 −=
sssF
j. )1)(2(
795)(
23
++
+++=
ss
ssssF

5
TRANSFORMADA INVERSA DE LAPLACE Y
ECUACIONES DIFERENCIALES
1. Resuelva cada ecuación diferencial en las condiciones iniciales especificadas por
medio de Transformadas de Laplace:
a. ( )
3)0(',0)0(:..
0)(2)('''
==
=−+
yyIC
tytyty
b. ( )
7)0(',1)0(:..
0)(3)('2''
==
=−−
yyIC
tytyty
c. ( )
8)0(',1)0(:..
)(8)('2''
==
=+
yyIC
tytyty
d. ( )
4)0(',0)0(:..
0)(3)('2''
==
=−+
xxIC
txtxtx
e. ( )
3)0(',8)0(:..
)(3)('4''
==
=+
xxIC
txtxtx
f. ( )
2)0(',2)0(:..
)(8)('4''
==
−=+
xxIC
txtxtx
g. ( )
0)0(',2)0(:..
)(2)(8)('4''
==
=++
xxIC
ttxtxtx δ
2. Obtener la ecuación diferencial de cada uno de los sistemas eléctricos
mostrados y hallar la magnitud especificada en cada circuito en función de
R,L,C y V:

6
7
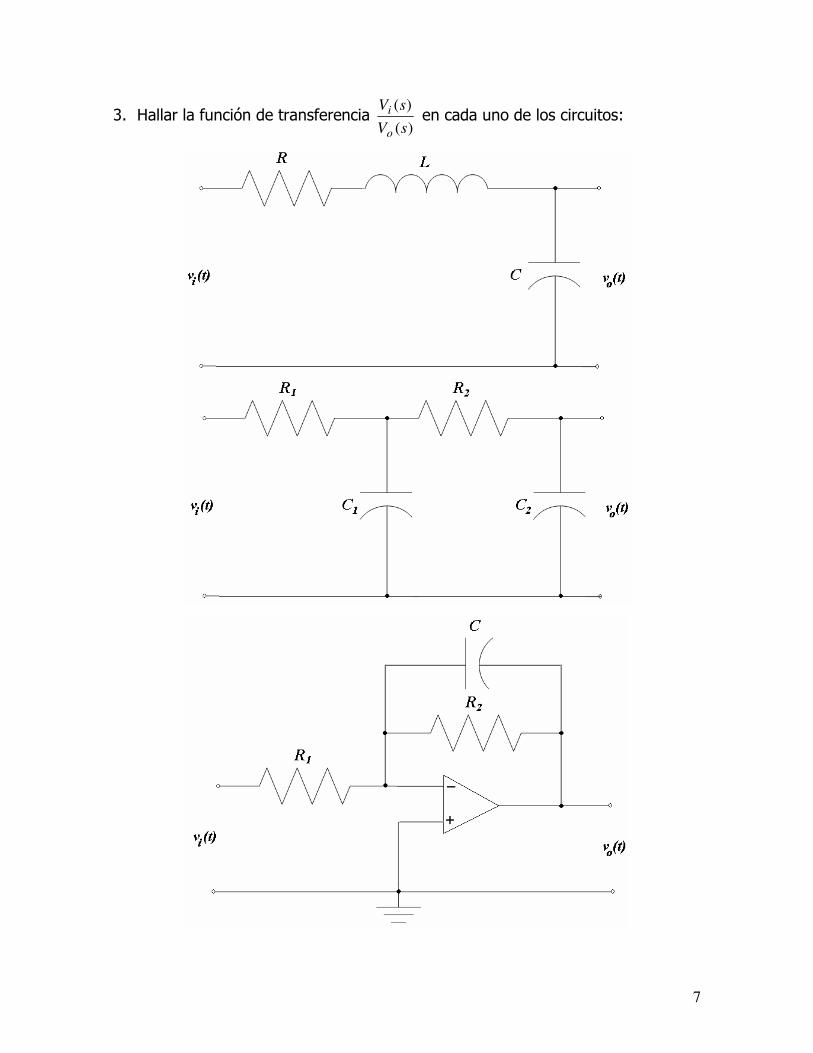
3. Hallar la función de transferencia )(
)(
sV
sV
o
i en cada uno de los circuitos:
8
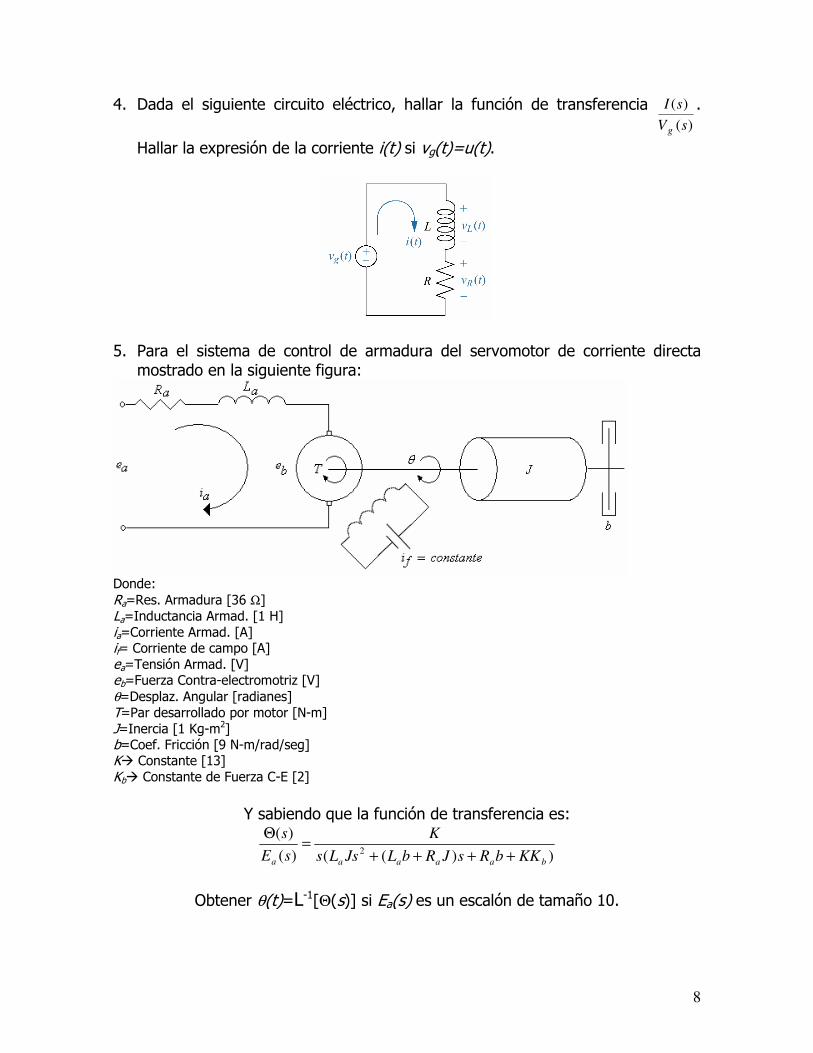
4. Dada el siguiente circuito eléctrico, hallar la función de transferencia )(
)(
sV
sI
g
.
Hallar la expresión de la corriente i(t) si vg(t)=u(t).
5. Para el sistema de control de armadura del servomotor de corriente directa mostrado en la siguiente figura:
Donde: Ra=Res. Armadura [36 Ω] La=Inductancia Armad. [1 H] ia=Corriente Armad. [A] if= Corriente de campo [A] ea=Tensión Armad. [V] eb=Fuerza Contra-electromotriz [V] θ=Desplaz. Angular [radianes] T=Par desarrollado por motor [N-m] J=Inercia [1 Kg-m2] b=Coef. Fricción [9 N-m/rad/seg] K Constante [13] Kb Constante de Fuerza C-E [2]
Y sabiendo que la función de transferencia es:
))(()(
)(2
baaaaa KKbRsJRbLJsLs
K
sE
s
++++=
Θ
Obtener θ(t)=L-1[Θ(s)] si Ea(s) es un escalón de tamaño 10.
9
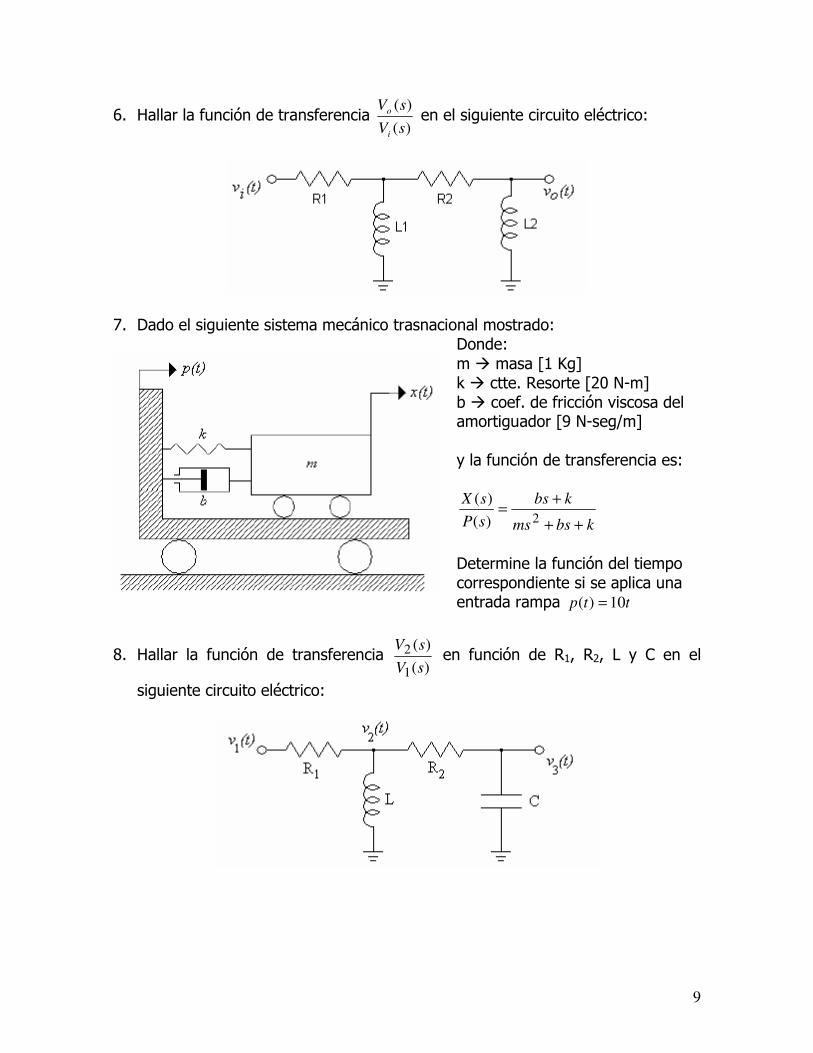
6. Hallar la función de transferencia )(
)(
sV
sV
i
o en el siguiente circuito eléctrico:
7. Dado el siguiente sistema mecánico trasnacional mostrado:
Donde: m masa [1 Kg] k ctte. Resorte [20 N-m] b coef. de fricción viscosa del amortiguador [9 N-seg/m] y la función de transferencia es:
kbsms
kbs
sP
sX
++
+=
2)(
)(
Determine la función del tiempo correspondiente si se aplica una entrada rampa ttp 10)( =
8. Hallar la función de transferencia )(
)(
1
2
sV
sV en función de R1, R2, L y C en el
siguiente circuito eléctrico:
10
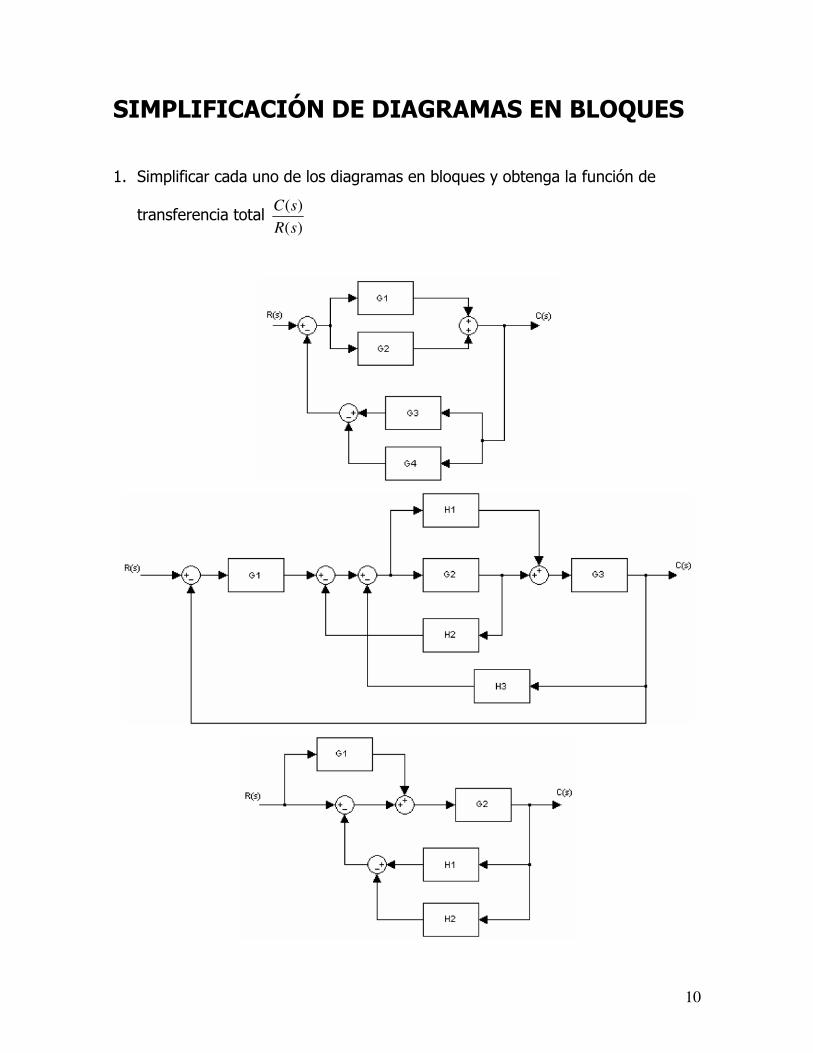
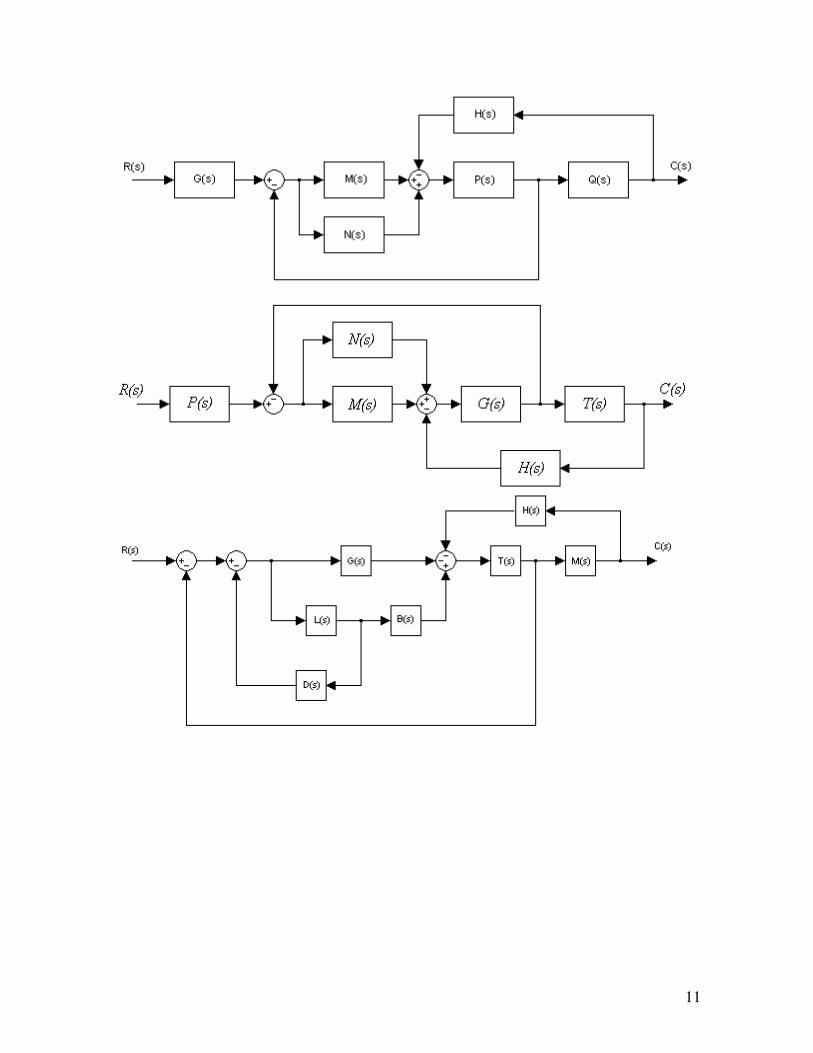
SIMPLIFICACIÓN DE DIAGRAMAS EN BLOQUES
1. Simplificar cada uno de los diagramas en bloques y obtenga la función de
transferencia total )(
)(
sR
sC
11
12
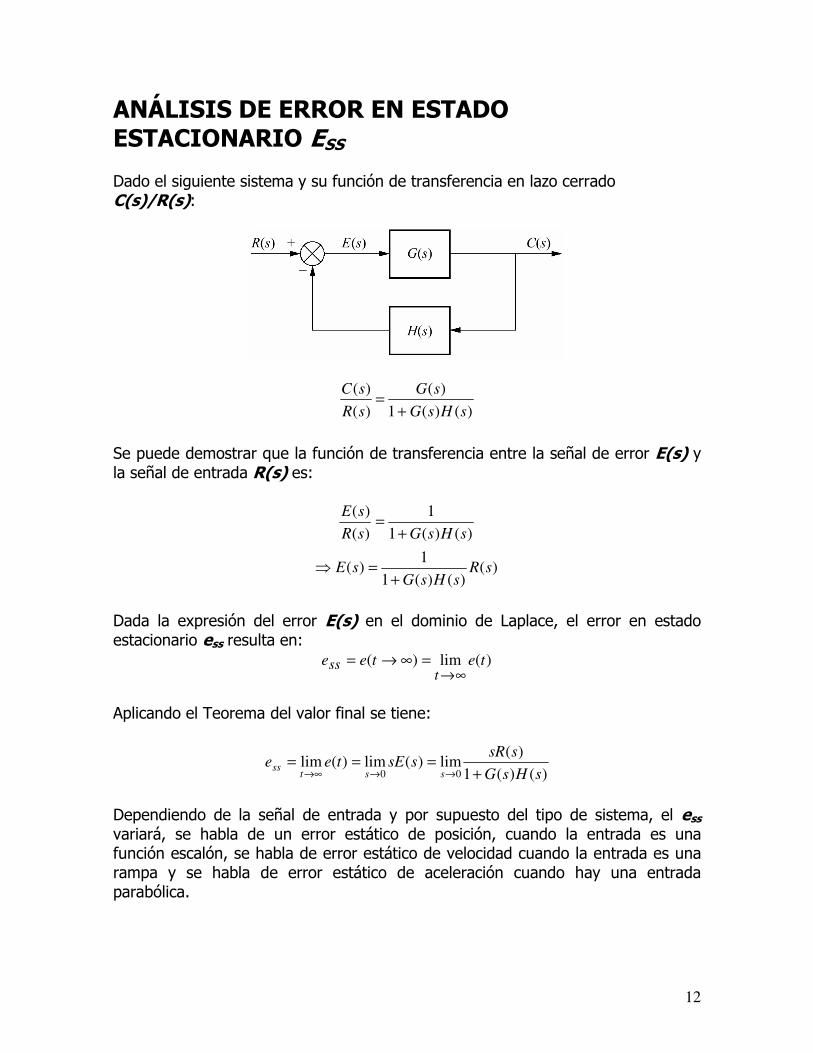
ANÁLISIS DE ERROR EN ESTADO ESTACIONARIO ESS Dado el siguiente sistema y su función de transferencia en lazo cerrado C(s)/R(s):
)()(1
)(
)(
)(
sHsG
sG
sR
sC
+=
Se puede demostrar que la función de transferencia entre la señal de error E(s) y la señal de entrada R(s) es:
)()()(1
1)(
)()(1
1
)(
)(
sRsHsG
sE
sHsGsR
sE
+=⇒
+=
Dada la expresión del error E(s) en el dominio de Laplace, el error en estado estacionario ess resulta en:
)(lim)( teteet
ss∞→
=∞→=
Aplicando el Teorema del valor final se tiene:
)()(1
)(lim)(lim)(lim
00 sHsG
ssRssEtee
sstss
+===
→→∞→
Dependiendo de la señal de entrada y por supuesto del tipo de sistema, el ess variará, se habla de un error estático de posición, cuando la entrada es una función escalón, se habla de error estático de velocidad cuando la entrada es una rampa y se habla de error estático de aceleración cuando hay una entrada parabólica.
13
1er Caso: Entrada Escalón Unitario. R(s)=1/s
)0()0(1
1
)()(1
1
lim0 HGsHsG
ss
es
ss+
=+
=→
La constante Kp de error estático de posición se define como:
)0()0()()(lim
0HGsHsGK
sp ==
→
Entonces, el error estático se puede escribir en términos de Kp como:
p
ssK
e+
=1
1
2do Caso: Entrada Rampa Unitaria. R(s)=1/s2
)()(
1lim
)()(
1lim
)()(1
1
lim00
2
0 sHssGsHssGssHsG
ss
esss
ss→→→
=+
=+
=
La constante Kv de error estático de velocidad se define como:
)()(lim
0sHssGK
sv
→=
Entonces, el error estático se puede escribir en términos de Kv como:
v
ssK
e1
=
3er Caso: Entrada Parábola Unitaria. R(s)=1/s3
La Función Parábola unitaria está definida como:
3
2
1)(
0,0
0,2)(
ssR
t
tt
tr =⇒
<
≥
=
)()(
1lim
)()(
1lim
)()(1
1
lim20220
3
0 sHsGssHsGsssHsG
ss
esss
ss→→→
=+
=+
=

14
La constante Ka de error estático de aceleración se define como:
)()(lim2
0sHsGsK
sa
→=
Entonces, el error estático se puede escribir en términos de Ka como:
a
ssK
e1
=
EJERCICIOS 1. Considere el sistema con realimentación unitaria cuya función de transferencia
de lazo abierto es:
)()(
BJss
KsG
+=
a. Hallar la función de transferencia en lazo cerrado. b. Si se aplica en la entrada R(s) una rampa unitaria, hallar la expresión en
el dominio de Laplace del error E(s).
c. Hallar la constante de error estático de velocidad Kv y el ess. 2. Considere el sistema con realimentación unitaria y cuya función de
transferencia de lazo cerrado es:
bass
bKs
sR
sC
++
+=
2)(
)(
a. Determine la función de transferencia de lazo abierto G(s). b. Determine el error en estado estacionario para una rampa unitaria.
c. ¿Qué le pasa al ess si K=a?
3. Para el siguiente sistema, determinar la función de transferencia de lazo
cerrado C(s)/R(s) si la función de transferencia del controlador Gc(s) es la que se especifica.

15
Hallar el error en estado estacionario si r(t) está definida como:
Si en la expresión del controlador, se anula la acción integral, calcular que le pasa al error en estado estacionario. Comente.
4. Para el siguiente sistema, determinar la función de transferencia de lazo
cerrado C(s)/R(s) si la función de transferencia del controlador Gc(s) es la que se especifica.
5. En el ejercicio anterior, hallar la expresión del error en estado estacionario si la entrada r(t) esta definida de la siguiente forma:

16
SISTEMAS DE 2DO ORDEN 1. Dado los siguientes sistemas de segundo orden, especificar el tipo de
amortiguamiento, determinar wn, ζ y σ, trazar el diagrama de polos y ceros y obtener la respuesta temporal del sistema c(t) si r(t)=u(t):
a.
b.
c.
d. 2. Con base al sistema mostrado, determine los valores de K y b de modo que el
sistema tenga una relación de amortiguamiento ζ=0.7 y un frecuencia natural no amortiguada wn = 4 rad/seg.
3. Determine el valor de b en el sistema mostrado de modo que la relación de
amortiguamiento sea 0.5. Luego obtenga el tiempo de crecimiento, tiempo de pico, sobreimpulso máximo y tiempo de establecimiento, dado que la entrada es un escalón unitario.
17
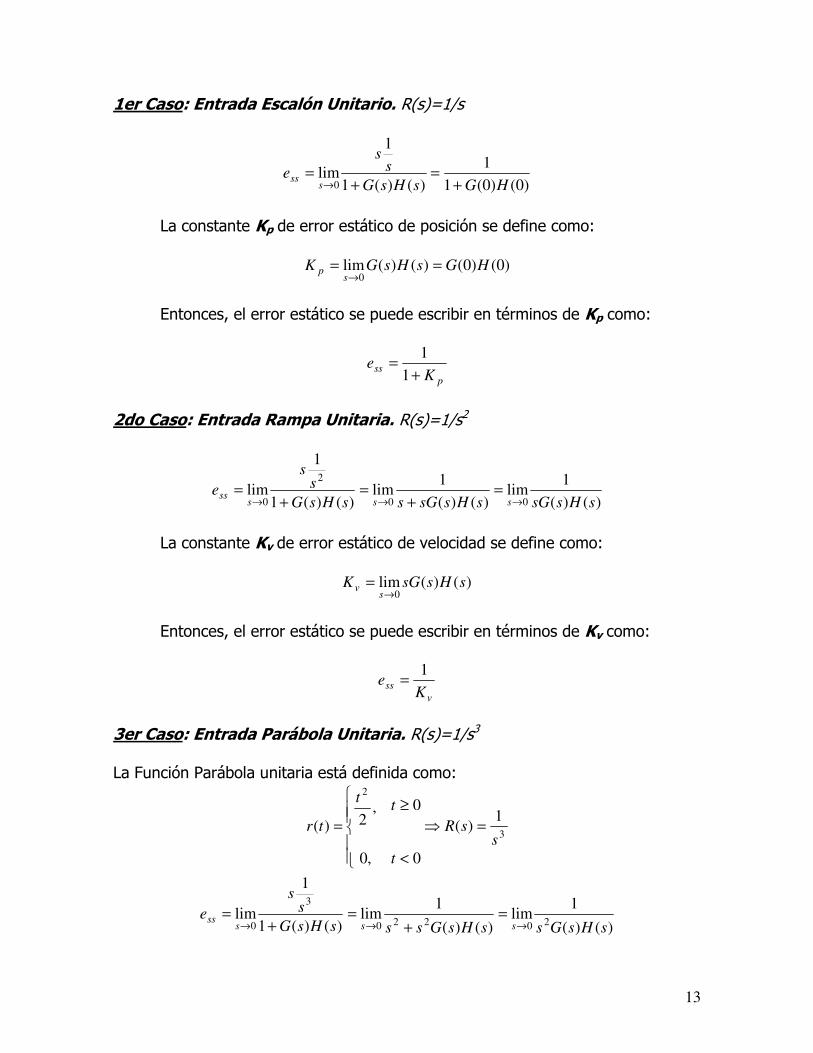
4. Dado el siguiente sistema, hallar el valor de K para que el sistema el lazo cerrado presente un amortiguamiento crítico. Hallar el rango de valores de K para que el sistema este sub-amortiguado y para que este sobre-amortiguado.
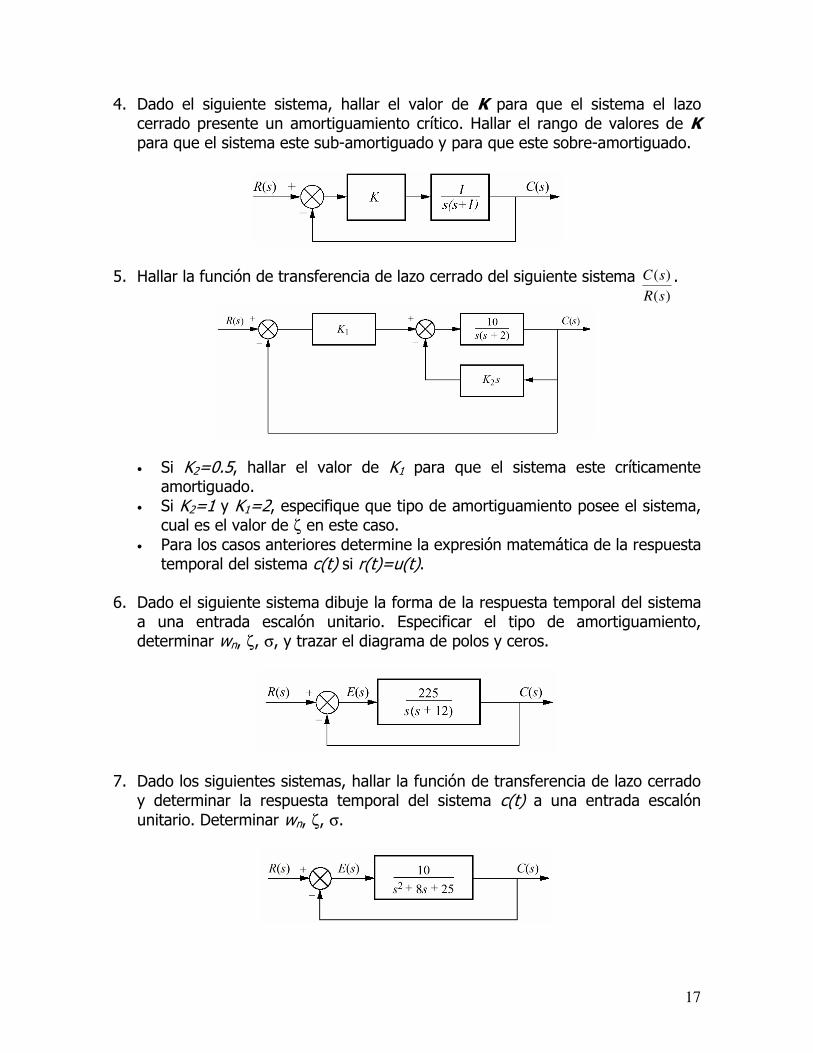
5. Hallar la función de transferencia de lazo cerrado del siguiente sistema
)(
)(
sR
sC .
• Si K2=0.5, hallar el valor de K1 para que el sistema este críticamente amortiguado.
• Si K2=1 y K1=2, especifique que tipo de amortiguamiento posee el sistema, cual es el valor de ζ en este caso.
• Para los casos anteriores determine la expresión matemática de la respuesta temporal del sistema c(t) si r(t)=u(t).
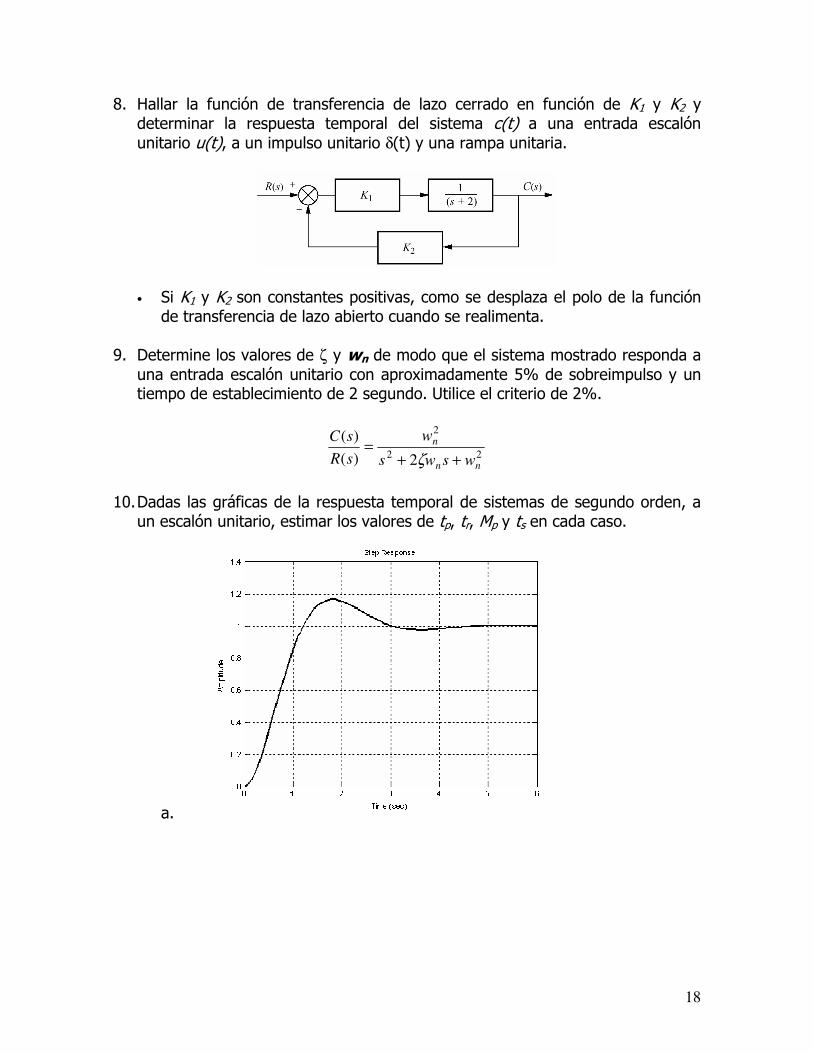
6. Dado el siguiente sistema dibuje la forma de la respuesta temporal del sistema
a una entrada escalón unitario. Especificar el tipo de amortiguamiento, determinar wn, ζ, σ, y trazar el diagrama de polos y ceros.
7. Dado los siguientes sistemas, hallar la función de transferencia de lazo cerrado
y determinar la respuesta temporal del sistema c(t) a una entrada escalón unitario. Determinar wn, ζ, σ.
18
8. Hallar la función de transferencia de lazo cerrado en función de K1 y K2 y determinar la respuesta temporal del sistema c(t) a una entrada escalón unitario u(t), a un impulso unitario δ(t) y una rampa unitaria.
• Si K1 y K2 son constantes positivas, como se desplaza el polo de la función de transferencia de lazo abierto cuando se realimenta.
9. Determine los valores de ζ y wn de modo que el sistema mostrado responda a
una entrada escalón unitario con aproximadamente 5% de sobreimpulso y un tiempo de establecimiento de 2 segundo. Utilice el criterio de 2%.
22
2
2)(
)(
nn
n
wsws
w
sR
sC
++=
ζ
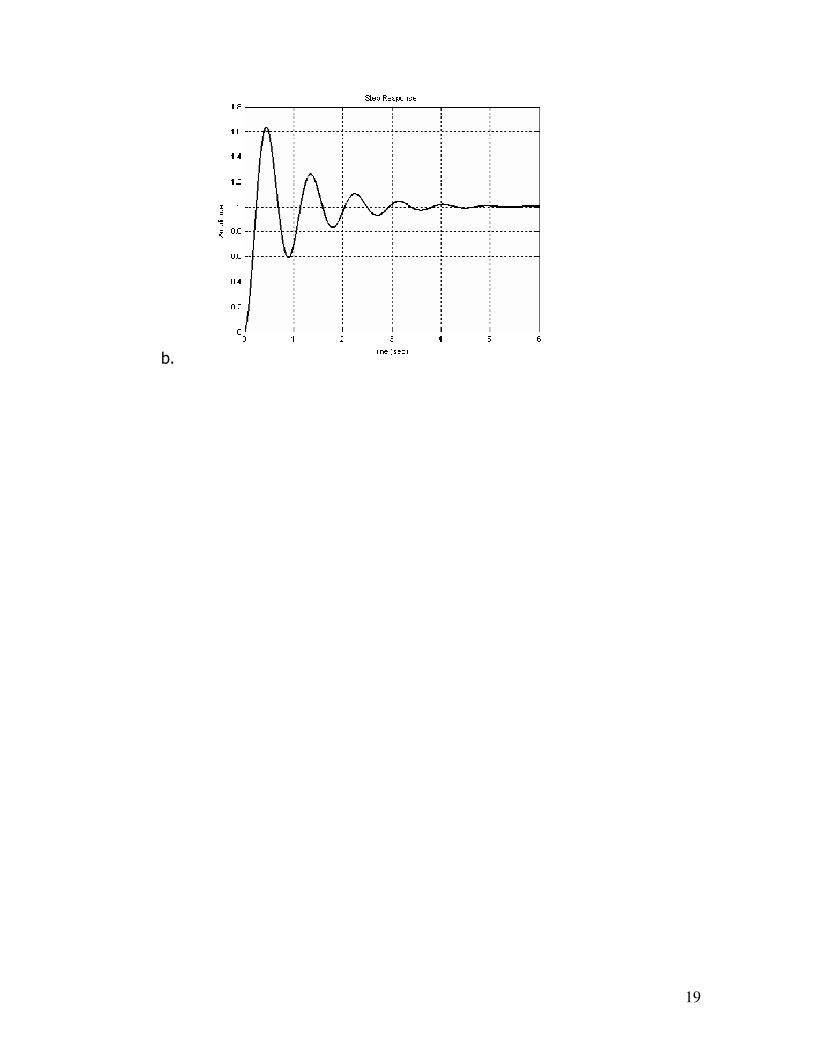
10. Dadas las gráficas de la respuesta temporal de sistemas de segundo orden, a
un escalón unitario, estimar los valores de tp, tr, Mp y ts en cada caso.
a.
19
b.
20
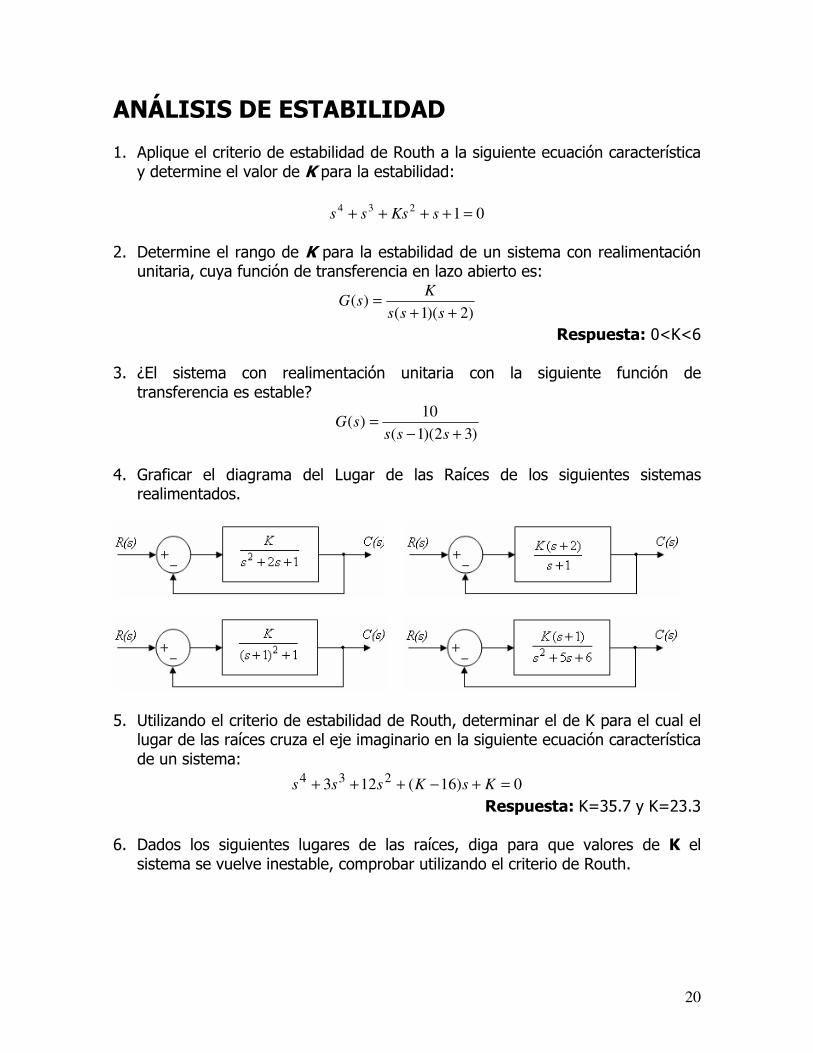
ANÁLISIS DE ESTABILIDAD 1. Aplique el criterio de estabilidad de Routh a la siguiente ecuación característica
y determine el valor de K para la estabilidad:
01234 =++++ sKsss
2. Determine el rango de K para la estabilidad de un sistema con realimentación
unitaria, cuya función de transferencia en lazo abierto es:
)2)(1()(
++=
sss
KsG
Respuesta: 0<K<6 3. ¿El sistema con realimentación unitaria con la siguiente función de
transferencia es estable?
)32)(1(
10)(
+−=
ssssG
4. Graficar el diagrama del Lugar de las Raíces de los siguientes sistemas
realimentados.
5. Utilizando el criterio de estabilidad de Routh, determinar el de K para el cual el
lugar de las raíces cruza el eje imaginario en la siguiente ecuación característica de un sistema:
0)16(123234 =+−+++ KsKsss
Respuesta: K=35.7 y K=23.3
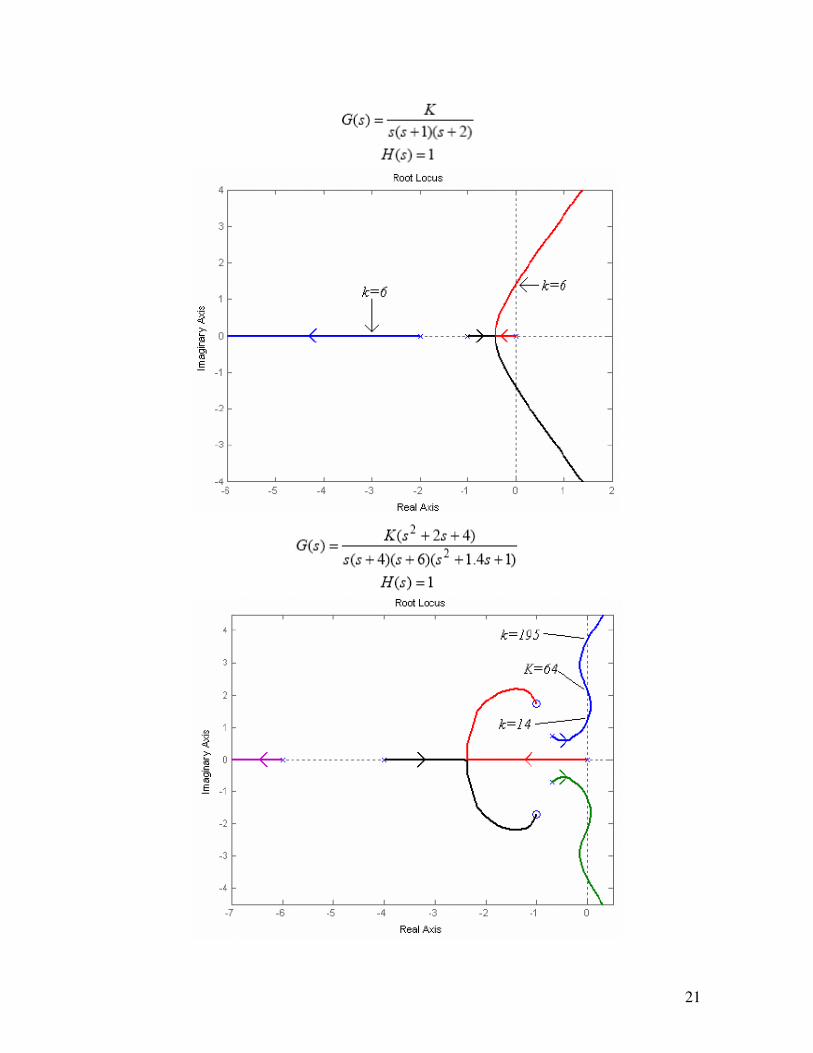
6. Dados los siguientes lugares de las raíces, diga para que valores de K el sistema se vuelve inestable, comprobar utilizando el criterio de Routh.
21

22
7. Dados los siguientes lugares de las raíces, señale en la gráfica las zonas donde el sistema es estable.
23
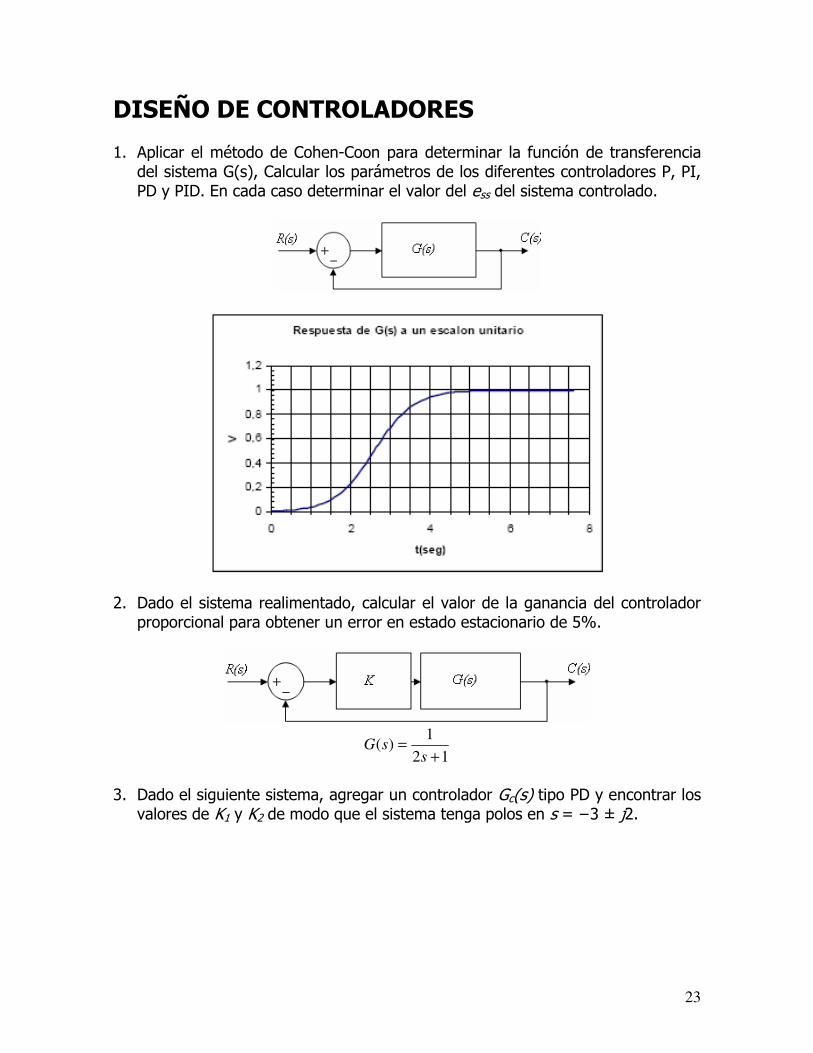
DISEÑO DE CONTROLADORES 1. Aplicar el método de Cohen-Coon para determinar la función de transferencia
del sistema G(s), Calcular los parámetros de los diferentes controladores P, PI, PD y PID. En cada caso determinar el valor del ess del sistema controlado.
2. Dado el sistema realimentado, calcular el valor de la ganancia del controlador proporcional para obtener un error en estado estacionario de 5%.
12
1)(
+=
ssG
3. Dado el siguiente sistema, agregar un controlador Gc(s) tipo PD y encontrar los
valores de K1 y K2 de modo que el sistema tenga polos en s = −3 ± j2.

24
4. Para el ejercicio anterior, determine el error en estado estacionario si la entrada
r(t) esta definida como:


















