Uso de Bluetooth de Baja Energía en Aplicaciones …diego/docs/JP2017-XtremeLoc.pdfUso de Bluetooth...
7
1 2 3 4 5 6
Transcript of Uso de Bluetooth de Baja Energía en Aplicaciones …diego/docs/JP2017-XtremeLoc.pdfUso de Bluetooth...

Uso de Bluetooth de Baja Energía enAplicaciones de Localización Indoor
Daniel Barba 1 , Ana Moretón-Fernández 2 , Héctor del Campo-Pando 3 ,
Sergio García-Villanueva 4 , Juan March 5 y Diego R. Llanos 6
Resumen� La localización de activos en el interior
de edi�cios es un problema con aplicaciones en dife-
rentes campos y actividades, como la sanidad, pre-
vención de riesgos laborales o diferentes actividades
comerciales. En estos lugares, donde la localización
mediante GPS no está disponible, es necesario ofrecer
una nueva solución que permita resolver el problema
ofreciendo una precisión adecuada y manteniendo la
viabilidad económica del proyecto. En este paper pre-
sentamos Xtremeloc, un sistema de posicionamiento
indoor basado en tecnología Bluetooth de Baja Ener-
gía. Además, compararemos nuestra propuesta con las
diferentes alternativas disponibles, describiendo sus
ventajas e inconvenientes.
Palabras clave� Indoor Positioning, localización,
Bluetooth, BLE
I. Introducción
La Localización Indoor es una técnica aún en desa-rrollo para el posicionamiento de objetos y personasen el interior de un edi�cio. En estas circunstanciasel uso de GPS no es viable bien por una baja cober-tura que limita a la obtención de conexión tras 15-30minutos de funcionamiento, o bien por una precisióncon un margen de error en el rango de las decenas demetros, se hace necesario encontrar una alternativade bajo coste y con la precisión requerida.Frente al Global Positioning System (GPS), apare-
ce el concepto de Local Positioning System (LPS) [1].Estos sistemas, al contrario que el GPS y similares,no ofrecen cobertura global sino que abarcan una zo-na relativamente pequeña, delimitada por el alcancede las balizas detectoras. Estas balizas se ubican enposiciones que son conocidas de antemano y, median-te el uso de distintos algoritmos, permiten ubicar unobjeto o persona en su sistema de coordenadas local.En concreto, un subtipo de LPS es el denominadoReal-time Locating System o RTLS. Estos sistemasañaden a la identi�cación la posibilidad de ubicar enun instante dado su posición en una zona delimitada.Durante los últimos años se han propuesto técni-
cas basadas en diferentes tecnologías inalámbricas,como Infrarrojos, Ultrasonidos, WIFI, RFID, Blue-tooth, etc. Recientemente están surgiendo algunasnuevas, como el uso de la tecnología Ultra-Wideband
1Departamento de Informática, Universidad de Valladolid,e-mail: [email protected].
2Departamento de Informática, Universidad de Valladolid,e-mail: [email protected].
3Departamento de Informática, Universidad de Valladolid,e-mail: [email protected].
4Departamento de Informática, Universidad de Valladolid,e-mail: [email protected].
5RDNest SL, e-mail: [email protected] de Informática, Universidad de Valladolid,
e-mail: [email protected].
(UWB). No obstante, aún no se ha conseguido un sis-tema de tiempo real con una adecuada respuesta alos movimientos y una precisión aceptable, así comocon un coste su�cientemente bajo para animar a sudespliegue comercial.
Nuestro trabajo ha consistido en el desarrollo deuna solución que hemos llamado Xtremeloc. Estasolución se basa en el uso de tecnología Bluetoothde Baja Energía (BLE), permitiendo localizar en elplano de un edi�cio dispositivos BLE emisores gra-cias al despliegue de un número de dispositivos re-ceptores llamados RDHubs. En este paper, ademásde explorar las diferentes tecnologías disponibles, ex-plicamos la arquitectura de Xtremeloc, describiendolos diferentes dispositivos implicados. Comentamoslos diferentes problemas relacionados con la gran va-riabilidad en la intensidad de la señal Bluetooth, ymostramos los resultados obtenidos al aplicar un al-goritmo de �ltrado, desarrollado en colaboración conRDNest SL.
XtremeLoc es un sistema de localización indooren tiempo real (RTLS) de bajo coste. En el momen-to de la escritura de este paper, un prototipo pilotodel sistema ha sido desplegado en la Escuela de Inge-niería Informática de Valladolid, dónde ya se puedeutilizar el sistema para la ubicación de personas oactivos en un área del edi�cio. Este sistema puedeimplantarse fácilmente y con un coste muy asequi-ble en otros edi�cios públicos o industriales en losque la ubicación de personas o activos puede ser in-teresante. Los hospitales y centros de salud son unclaro ejemplo. Con un elevado número de personasen constante movimiento, la ubicación a tiempo realde los pacientes puede mejorar las condiciones de se-guridad de los mismos. Grandes centros industrialespueden mejorar sensiblemente las condiciones de se-guridad en caso de emergencia, como por ejemplo laposibilidad de conocer la ubicación de los trabajado-res durante un incendio o accidente. Existen tambiénaplicaciones fuera del ámbito de la seguridad o de lasalud. La localización a tiempo real de material en al-macenes o recintos industriales en los que dichos ma-teriales suelen moverse con relativa frecuencia puedereducir las situaciones en las que estos materiales sepierden durante los transportes. La principal contri-bución de XtremeLoc frente a sistemas tradicionaleses la capacidad de disponer de la ubicación real en uninstante dado, sin necesidad de control de accesos oanotaciones manuales, además de permitir el alma-cenamiento de los desplazamientos de la persona oactivo en seguimiento.
El resto del paper se estructura de la siguiente ma-nera. La Sección II presenta una descripción de lastecnologías que se utilizan en Localización Indoor conun coste medio-bajo de implementación y una preci-sión media-alta, analizando sus fortalezas y debilida-des. En la Sección III presentamos nuestra solución,Xtremeloc. La Sección IV describe los problemas dela tecnología Bluetooth relativos a la intensidad dela señal y su efecto en el sistema de localización. LaSección V contiene las conclusiones y trabajo futurorelativos a este trabajo.
II. Estado del Arte
En esta sección se describen las técnicas actualesde Localización Indoor [2, 3], especialmente RFID,Ultra-Wideband, Bluetooth y Ultrasonidos, anali-zando su funcionamiento así como sus ventajas e in-convenientes en un despliegue real. La literatura esmuy amplia en este campo y algunas tecnologías lle-van años utilizandose en el campo del LPS y RTLS.Para los propósitos de nuestro estudio, analizaremoslas tecnologías mejor indicadas para los siguientesrequisitos:
Posicionamiento en tiempo real.Despliegue en entornos con un alto número deobstáculos y trá�co de personas.Posicionamiento con interacción mínima de lapersona o activo a localizar.Soluciones de bajo coste cuyo despliegue sea eco-nómicamente viable.
Estas características hacen difícil la implementa-ción de sistemas de localización indoor que ya hansido probadas y utilizadas en situaciones como elguiado de robots en fábricas. Esto se debe a que mu-chos de esos sistemas no son capaces de funcionarcorrectamente en entornos menos controlados.
A. RFID: Radio Frequency Identi�cation
La tecnología RFID [4, 5] existe desde hace años.Se basa en el uso de pequeñas etiquetas, compuestaspor un chip y una antena. Su uso más conocido espara la lectura de información almacenada en dichasetiquetas. Los sistemas RFID se dividen en dos tipos:
RFID Pasivo: Las etiquetas son más simples,activándose mediante energía transferida por ellector RFID por radio frecuencia. Debido a es-to, su alcance y potencia son extremadamentepequeños (del orden de tres metros).RFID Activo: Las etiquetas tienen su propia ba-tería, lo que permite aumentar su potencia y sualcance (hasta 100m).
A pesar de que las etiquetas RFID son extremada-mente baratas, en particular las de RFID pasivo, estatecnología presenta varios inconvenientes. En primerlugar, el precio de los lectores RFID es muy alto.En segundo lugar, la lectura RFID tiene una fuertecomponente direccional, obligando a aumentar enor-memente el número de lectores a instalar para unacobertura aceptable. Los sistemas de posicionamien-
to basados en este sistema consisten más en un se-guimiento del paso de las etiquetas RFID bajo loslectores que en una ubicación a tiempo real.
B. UWB: Ultra-Wideband
La tecnología Ultra-Wideband [6, 7] es relativa-mente nueva y consiste en el envío de pulsos de granancho de banda. Un sistema de posicionamiento ba-sado en UWB consistiría en una serie de estaciones�jas y un número de dispositivos móviles a localizar.
El funcionamiento de un sistema basado en UWBconsiste en el siguiente proceso:
1. El dispositivo móvil emite un primer mensaje.2. La estación �ja recibe el mensaje y envía unarespuesta.
3. El dispositivo móvil recibe la respuesta y envíaun segundo mensaje.
4. La estación �ja recibe el segundo mensaje y,con los tiempos de recepción de ambos mensajes,calcula la distancia existente entre ambos.
El cálculo de la distancia es realizado utilizando eltiempo transcurrido en el envío de los mensajes entrelos dos dispositivos, cuya velocidad es conocida (lavelocidad de la luz).
La tecnología UWB es una de las más prometedo-ras para el posicionamiento indoor. Tiene numerosasventajas, como por ejemplo:
Bajo consumo de energía.Los obstáculos tienen un escaso impacto en elsistema.Permite una rápida transferencia de informaciónentre dispositivos emisores y receptores graciasal gran ancho de banda utilizado.El margen de error está en el orden de los cen-tímetros.
A pesar de todo, actualmente esta tecnología tienetambién algunas desventajas:
El coste del sistema es, por el momento, bastanteelevado para su despliegue a gran escala.La señal inter�ere con sistemas como GPS, osistemas que operen en las bandas de frecuencia250-750MHz, 3.2-4.7GHz, y 5.9-10.2GHz.
Si los efectos de las interferencias son aceptables yel coste de despliegue de este sistema continua redu-ciéndose, esta tecnología permitirá dar una solucióneconómicamente viable con un margen de error muypequeño para sistemas de posicionamiento indoor detiempo real.
C. Ultrasonidos
Pueden utilizarse soluciones basadas principal-mente en ultrasonidos [8,9] (a veces se complementancon radiofrecuencia para tareas de sincronización dedispositivos) para la localización indoor de objetos ypersonas.
No obstante, su bajo coste puede convertir unasolución basada en ultrasonidos en una alternativaviable.

Existen tres tipos de sistemas de localización ba-sados en ultrasonidos. El primero de ellos es el de-nominado sistema bat. En este sistema, las personasu objetos que se pretenden localizar llevan un dispo-sitivo emisor de ultrasonidos que se activa al recibiruna señal. Una red de receptores desplegada a cor-ta distancia unos de otro reciben los ultrasonidos ypermiten ubicar el punto de emisión.
Otro sistema, bajo el nombre de cricket consisteen el despliegue de emisores en posiciones �jas. Estosdispositivos emiten ultrasonidos que permiten a losreceptores localizarse.
La tercera alternativa se trata del sistema DOLP-HIN. Este sistema se basa en la igualdad entre todoslos dispositivos, con la salvedad de que algunos deellos están ubicados en posiciones �jas y sirven dereferencia. Los dispositivos móviles utilizan esta in-formación junto con los datos obtenidos mediante eluso de ultrasonidos para calcular su posición.
Esta tecnología tiene una serie de limitaciones, en-tre las cuales se encuentran:
Las señales se limitan a la habitación en la quese producen.Las refracciones afectan severamente a las me-dicionesLa identi�cación del objeto o persona localiza-dos es problemática.
D. Infrarrojo
La tecnología de infrarrojo se ha utilizado para lalocalización indoor [10, 11] en numerosas ocasiones.Estos sistemas se basan en la existencia de una lineade visión sin obstáculos entre un emisor de luz infra-rroja y un detector. El posicionamiento de activos seefectúa mediante triangulación, para lo cual se ne-cesita conocer el ángulo de incidencia de la luz, asícomo la posición de las balizas �jas.
Como en otras tecnologías, este sistema puede uti-lizar indistintamente como baliza �ja tanto los re-ceptores como los emisores. En cualquier caso, es ne-cesario que exista una linea visual entre emisores yreceptores, lo cual limita su uso a situaciones en lasque sea posible mantener esta visual entre un númerode dispositivos su�ciente para realizar la triangula-ción.
Con el objetivo de identi�car distintos emisores enun sistema de infrarrojos es necesario que dichos dis-positivos emitan un identi�cador. La capacidad detransmisión está ligada a la frecuencia de toma dedatos de los receptores y necesita de una sincroniza-ción adecuada.
Los dispositivos de infrarrojos pueden alcanzaruna precisión muy alta, de unos pocos centímetros.No obstante, su uso en un sistema localización entiempo real presenta un número de problemas condifícil solución:
Necesidad de una linea visual directa y constan-te entre dispositivos.Di�cultad para conseguir una cobertura comple-ta en un edi�cio.
Identi�cación de los dispositivos y baja frecuen-cia de transmisión de datos.
E. Computer Vision
El concepto de Computer Vision o Visión Arti�-cial consiste en la automatización del proceso llevadoa cabo por el sistema visual humano. Las imágenesadquiridas mediante cámaras digitales se procesanpara extraer información. Es posible desarrollar unsistema de posicionamiento indoor mediante el usode Visión Arti�cial [12].
Este sistema consiste en el uso de dispositivos concámara que toman imágenes de los alrededores delusuario o activo a localizar. Estos dispositivos envíanlas imágenes a un servidor remoto que las procesa,identi�cando la posición del activo o persona. Es-ta tarea requiere de la detección de los denominadosmarcadores identi�cativos que permiten la asociaciónde una imagen con una ubicación real. Posteriormen-te, mediante el uso de secuencias de imágenes, se cal-cula la posición con más exactitud.
Esta tecnología no necesita dispositivos emisores yreceptores, no obstante, sigue requiriendo de balizas�jas (marcadores) que permitan asociar la posiciónactual con una posición conocida. El grueso del cos-te del sistema se encuentra en los dispositivos concámara utilizados, así como en el servidor central,que tiene una carga computacional bastante elevadaen comparación con otras alternativas. Debido a estoúltimo, su utilización a gran escala en un entorno detiempo real puede presentar problemas de escalabili-dad.
Además, este sistema necesita que el usuario es-té involucrado activamente en el proceso de localiza-ción, lo cual hace inviable su uso en la localización depersonas o activos en un gran número de situaciones.
F. Bluetooth Low Energy
Los dispositivos Bluetooth se engloban en los deno-minados dispositivos WPAN (Wireless Personal AreaNetwork). No obstante, su alcance puede llegar a los30-40m fácilmente a costa de una reducción en lascapacidades de transferencia bidireccional de infor-mación. Para aplicaciones de posicionamiento indooresto no supone un problema demasiado grave. Estetipo de dispositivos opera en la banda de 2.4GHz ysu consumo energético es muy bajo, permitiendo unalarga autonomía con baterías comunes.
Los sistemas de posicionamiento indoor basadosen Bluetooth Low Energy [13, 14] consisten en lo si-guiente:
Dispositivos emisores o beacons.Dispositivos receptores de paquetes BLE (Blue-tooth Low Energy).
Existen dos enfoques diferentes en el uso de Blue-tooth para el posicionamiento indoor, en función deltipo de dispositivo que se pretenda localizar. La so-lución más común consiste en el despliegue de un nú-mero de beacons en ubicaciones �jas de un edi�cio.Estos beacons emiten cada cierto tiempo un pequeño
paquete de datos (habitualmente utilizando el proto-colo iBeacon [15]). Un dispositivo receptor se encargade leer estos paquetes y, basándose en la intensidadde la señal recibida puede calcular su distancia conrespecto a cada uno de los beacons, permitiendo asísu posicionamiento.
Este enfoque tiene una serie de ventajas:
Las necesidades de cómputo pueden trasladarsea los dispositivos receptores, quienes únicamentetienen que preocuparse de su ubicación según lospaquetes que reciben.La complejidad del despliegue se reduce.Los dispositivos receptores pueden ser de di-ferentes tipos, habitualmente smartphones conuna aplicación Android o iOS.
No obstante, las desventajas son numerosas:
Su uso sólo tiene sentido para la localización depersonas que portan smartphones con una apli-cación determinada instalada.Se traslada la responsabilidad de la localizaciónal usuario, quien tiene que hacer un esfuerzo pa-ra que el sistema funcione, lo cual imposibilitael uso del sistema bajo ciertas circunstancias.Dado que los receptores son más caros que losbeacons, el coste del sistema aumenta.
El segundo enfoque consiste en el uso de los bea-cons como dispositivos a localizar. Para ello, son losdispositivos receptores los que se despliegan por eledi�cio en puntos �jos. Los beacons se desplieganjunto a los objetos o personas que desean localizarseen el interior del edi�cio. Los dispositivos recepto-res reciben los paquetes de los beacons y, de nuevobasándose en la intensidad de la señal, calculan ladistancia entre ellos y la almacenan en un servidorcentral.
Este segundo enfoque tiene las siguientes ventajas:
Dado el pequeño tamaño de los beacons y su au-tonomía, puede usarse para la localización tantode objetos como de personas.El usuario no necesita realizar ningún esfuerzopara que el sistema funcione, únicamente llevarel beacon consigo.Se reemplaza el uso de un smartphone por per-sona por un beacon, por lo que el coste globaldel sistema disminuye.El hardware es homogéneo, lo que reduce dife-rencias en las intensidades de la señal entre dis-positivos.
Este método tiene también desventajas:
El grueso del cómputo necesario para el posicio-namiento se centraliza en el servidor.Se incrementa la complejidad del software re-querido.La infraestructura necesaria para el desplieguede los receptores es más costosa que el desplieguede beacons estáticos.Las antenas receptores tienen que poder conec-tarse a una infraestructura de comunicaciones,
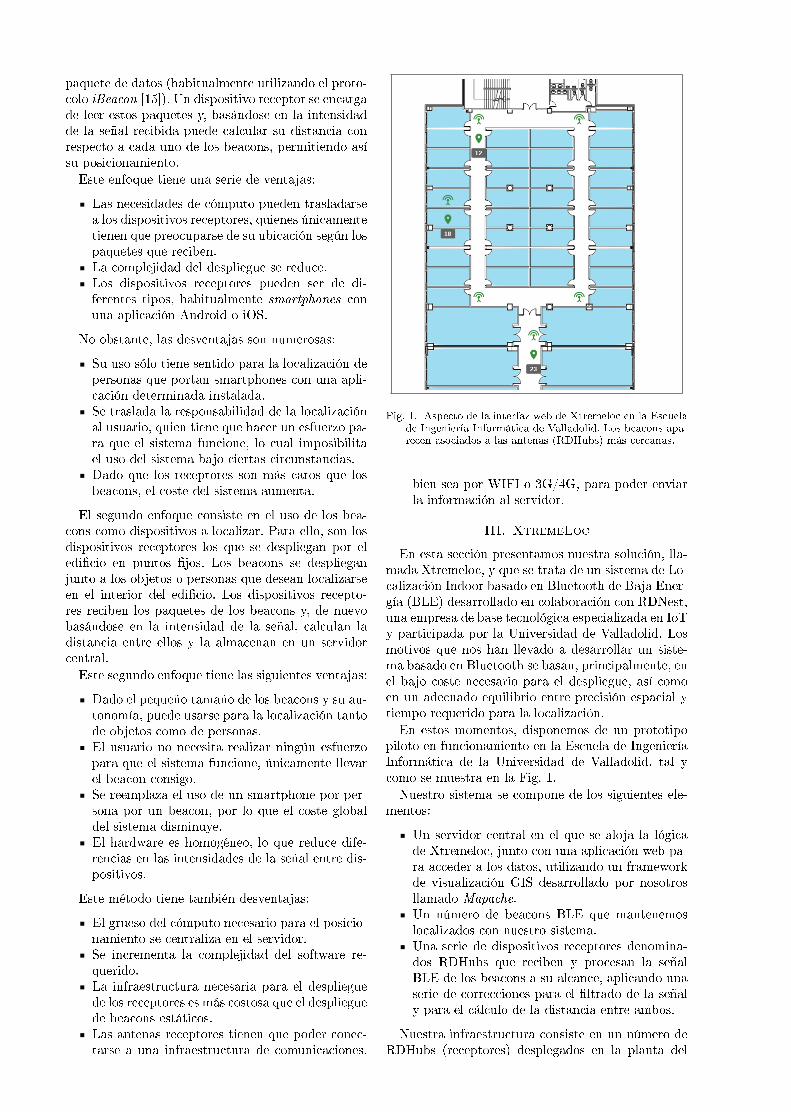
Fig. 1. Aspecto de la interfaz web de Xtremeloc en la Escuelade Ingeniería Informática de Valladolid. Los beacons apa-recen asociados a las antenas (RDHubs) más cercanas.
bien sea por WIFI o 3G/4G, para poder enviarla información al servidor.
III. XtremeLoc
En esta sección presentamos nuestra solución, lla-mada Xtremeloc, y que se trata de un sistema de Lo-calización Indoor basado en Bluetooth de Baja Ener-gía (BLE) desarrollado en colaboración con RDNest,una empresa de base tecnológica especializada en IoTy participada por la Universidad de Valladolid. Losmotivos que nos han llevado a desarrollar un siste-ma basado en Bluetooth se basan, principalmente, enel bajo coste necesario para el despliegue, así comoen un adecuado equilibrio entre precisión espacial ytiempo requerido para la localización.
En estos momentos, disponemos de un prototipopiloto en funcionamiento en la Escuela de IngenieríaInformática de la Universidad de Valladolid, tal ycomo se muestra en la Fig. 1.
Nuestro sistema se compone de los siguientes ele-mentos:
Un servidor central en el que se aloja la lógicade Xtremeloc, junto con una aplicación web pa-ra acceder a los datos, utilizando un frameworkde visualización GIS desarrollado por nosotrosllamado Mapache.Un número de beacons BLE que mantenemoslocalizados con nuestro sistema.Una serie de dispositivos receptores denomina-dos RDHubs que reciben y procesan la señalBLE de los beacons a su alcance, aplicando unaserie de correcciones para el �ltrado de la señaly para el cálculo de la distancia entre ambos.
Nuestra infraestructura consiste en un número deRDHubs (receptores) desplegados en la planta del

edi�cio. Estos RDHubs son ordenadores con Linux debajo coste alimentados por la misma red eléctrica quealimenta a las luminarias del edi�cio y conectados auna red WIFI para el envío de los datos al servidory para la recepción de actualizaciones software.
Los beacons son pequeños y ligeros, con una au-tonomía de varios meses incluso bajo condiciones dealta frecuencia y potencia de transmisión.
Xtremeloc es un sistema en desarrollo y actual-mente consiste en un sistema de Localización Indoorbasado en el modo de Receptor más cercano, es de-cir, la ubicación de los beacons viene dada por laubicación del RDHub más cercano a ellos. En estosmomentos, nuestro desarrollo se centra en �ltrar ade-cuadamente la señal BLE recibida en los RDHubs, asícomo analizar el comportamiento del sistema frentea los obstáculos. Una vez concluida esta etapa deldesarrollo, nos centraremos en desarrollar un modode Ubicación Real basado en trilateración.
Para el cálculo de la distancia nos decantamos poruna función exponencial que relaciona la distanciacon la intensidad de la señal:
d = x · ey·rssiDonde x e y son constantes que nos permiten ajustarla curva a las particularidades de nuestro hardware, yrssi es la intensidad de la señal para un par RDHub-beacon.
Dado que nuestro sistema utiliza los beacons comodispositivos a localizar, Xtremeloc no supone ningúninconveniente para el usuario más allá de llevar consi-go el beacon, cuyo tamaño es su�cientemente peque-ño como para ser integrado en colgantes, pulseras,o similares. Por otra parte, dado que no requiere eluso del smartphone del usuario, reduce la posibilidadde que existan problemas relacionados con la privaci-dad. Además, dado que cada beacon emite su propioidenti�cador, el sistema no necesita almacenar datosrelativos al usuario (salvo el identi�cador puntual pa-ra poder distinguir a las personas localizadas en uninstante dado, pudiendo usar un pseudónimo paraello).
IV. Problemas Asociados a la Señal
La utilización de Bluetooth para la LocalizaciónIndoor presenta un número de problemas derivadosde la inestabilidad inherente a la señal. Esta señalpresenta una enorme variación en la intensidad in-cluso en situaciones estáticas. La variación dependede una serie de factores entre los que se encuentran:
Variaciones producidas por el hardware de losdispositivos.Variaciones de intensidad entre las distintasbandas de emisión, ya que el protocolo BLE emi-te simultaneamente en tres bandas [16].Atenuaciones de la señal por objetos que blo-quean el beacon.Fenómenos de propagación multicamino [17].
Estas variaciones provocan que los datos en crudoobtenidos por el sistema sean demasiado volátiles co-
mo para obtener una precisión adecuada. En la Fig.2 se presenta un histograma de las intensidades deseñal (RSSI) de un beacon con respecto a uno de losRD Hubs, situado exactamente a dos metros de dis-tancia. En este histograma se aprecia cómo existendiferentes zonas de pico en la recepción de la señal.
La variabilidad en la intensidad es bastante regu-lar a lo largo del tiempo, tal y como se puede apreciaren la Fig. 3(a), en la que se puede observar la dis-tribución de la intensidad de los diferentes paquetesrecibidos a lo largo de cuatro horas. En la Fig. 4(a)se muestra un intervalo más corto de cinco minutos.Como se puede apreciar, los datos se obtienen conuna considerable variabilidad, de ± 15dB.
Debido a estos problemas, en colaboración conRDNest [18] se ha desarrollado un algoritmo de �ltra-do de la señal que nos permite obtener datos muchomás estables para utilizarlos en el cálculo de las dis-tancias. Este algoritmo tiene en cuenta los siguientespuntos:
Alta escalabilidad en un entorno de tiempo real.Capacidad de respuesta ante un comportamien-to dinámico no previsible.
Esto es importante puesto que el sistema tiene queser capaz de mostrar información instantánea, de mo-do que se pueda disponer de datos a tiempo real dela situación de los beacons en movimiento en un edi-�cio. Además los beacons pueden tanto moverse li-bremente como estar estáticos, por tanto el sistematiene que poder dar respuesta a ambas situaciones.El mayor problema es distinguir entre una variaciónde posición o una variación en la intensidad produci-da por los fenómenos descritos anteriormente, y lasvariaciones producidas por cambios reales en la po-sición.
La aplicación de este algoritmo, desarrollado en co-laboración con RDNest, produce los resultados mos-trados en las Figs. 3(b) y 4(b), correspondientes alos datos en crudo mostrados en las Figs. 3(a) y 4(a)respectivamente.
Como se puede apreciar en estas �guras, consegui-mos reducir la variabilidad a ± 5dB. Si bien se siguetrabajando en este campo, en este punto podemostrabajar con una precisión aceptable en la mayoríade situaciones.
V. Conclusiones
En este paper hemos introducido Xtremeloc, nues-tra solución de Localización Indoor basada en Blue-tooth de Baja Energía, desarrollada en colaboracióncon RDNest SL. Hemos presentado nuestro prototipopiloto en funcionamiento en la Escuela de IngenieríaInformática de la Universidad de Valladolid, descri-biendo el hardware empleado y las responsabilidadesde los distintos dispositivos para el funcionamientodel sistema.
Hemos elaborado un resumen de las diferentes tec-nologías de Localización Indoor existentes en la ac-tualidad, seleccionando aquellas cuyo coste y preci-sión pueden ser viables para un despliegue en situa-

-100
-90
-80
-70
-60
-50
-40
0 2000 4000 6000 8000 10000 12000 14000
RSSI(dB)
Time(s)
-100
-90
-80
-70
-60
-50
-40
0 2000 4000 6000 8000 10000 12000 14000
RSSI(dB)
Time(s)
(a) Señales sin �trar. (b) Señales �ltradas.
Fig. 3. Distribución de RSSI de un beacon en un periodo de cuatro horas.
-100
-90
-80
-70
-60
-50
-40
0 50 100 150 200 250 300
RSSI(dB)
Time(s)
-100
-90
-80
-70
-60
-50
-40
0 50 100 150 200 250 300
RSSI(dB)
Time(s)
(a) Señales sin �ltrar. (b) Señales �ltradas.
Fig. 4. Distribución de RSSI de un beacon en un periodo de cinco minutos.
0
1000
2000
3000
4000
5000
6000
-100 -90 -80 -70 -60 -50 -40
Count
RSSI(dB)
Fig. 2. Histograma de RSSI de un beacon durante cuatrohoras.
ciones reales. Se han descrito las diferencias de fun-cionamiento de las diferentes tecnologías menciona-das, con especial atención a las necesidades de undespliegue basado en esas tecnologías, así como enlas fortalezas y debilidades de las mismas.Finalmente, hecho un análisis de los problemas re-
lativos a la señal Bluetooth, mostrando resultados encrudo así como el correspondiente �ltrado utilizandolos algoritmos desarrollados por RDNest. Nuestrosalgoritmos consiguen reducir la variabilidad de la se-
ñal Bluetooth de ± 15 dB a ± 5dB, aumentandoconsiderablemente la precisión del sistema al mismotiempo que mantenemos un buen comportamientodel sistema a tiempo real y asegurando la escalabili-dad del mismo.
Nuestro trabajo continua en diferentes frentes. Poruna parte, en colaboración con RDNest continuamosintentando reducir la variabilidad Bluetooth sin afec-tar al rendimiento del sistema. Con los actuales ni-veles de precisión, comenzamos el trabajo para im-plementar un sistema de Localización Real basadoen trilateración con los mismos criterios de manteni-miento de la escalabilidad del sistema y de la capaci-dad de respuesta a tiempo real del mismo. Por otrolado, continuamos expandiendo el prototipo pilotoañadiendo más RDHubs y beacons para extender lacobertura en la Escuela de Ingeniería Informática deValladolid.
Agradecimientos
Esta investigación ha sido parcialmente �nanciadapor el MICINN y el programa ERDF de la Unión Eu-ropea: proyecto HomProg-HetSys (TIN2014-58876-P), la red CAPAP-H6 (TIN2016-81840-REDT) y elCOST Program Action IC1305: Network for Sustai-nable Ultrascale Computing (NESUS).
Los autores desean agradecer a la Escuela de In-

geniería Informática de la Universidad de Valladolidpor su autorización y colaboración en el desplieguedel prototipo piloto de Xtremeloc.También agradecemos los comentarios recibidos
por parte de los revisores asignados, cuyas reseñasnos han sido de gran ayuda para mejorar el artículo.
Referencias
[1] Krzysztof W Kolodziej and Johan Hjelm, Local positio-ning systems: LBS applications and services, CRC press,2006.
[2] Luca Mainetti, Luigi Patrono, and Ilaria Sergi, �A surveyon indoor positioning systems,� in Software, Telecom-munications and Computer Networks (SoftCOM), 201422nd International Conference on. IEEE, 2014, pp. 111�120.
[3] Zhenlong Song, Gangyi Jiang, and Chao Huang, �A sur-vey on indoor positioning technologies,� in Theoreticaland Mathematical Foundations of Computer Science, pp.198�206. Springer, 2011.
[4] Abdelmoula Bekkali, Horacio Sanson, and Mitsuji Mat-sumoto, �R�d indoor positioning based on probabilisticr�d map and kalman �ltering,� in Wireless and Mobi-le Computing, Networking and Communications, 2007.WiMOB 2007. Third IEEE International Conference on.IEEE, 2007, pp. 21�21.
[5] Samer S Saab and Zahi S Nakad, �A standalone r�dindoor positioning system using passive tags,� IEEETransactions on Industrial Electronics, vol. 58, no. 5, pp.1961�1970, 2011.
[6] Suheer Alhadhrami, A Al-Salman, H Al-Khalifa, Ab-dulrahman Alari�, Ahmad Alnafessah, Mansour Alsa-leh, and M Al-Ammar, �Ultra wideband positioning: Ananalytical study of emerging technologies,� in Procee-dings of the Eighth International Conference on SensorTechnologies and Applications, SENSORCOMM, 2014,pp. 1�9.
[7] Marco Gunia, Florian Protze, Niko Joram, and FrankEllinger, �Setting up an ultra-wideband positioning sys-tem using o�-the-shelf components,� in Positioning,Navigation and Communications (WPNC), 2016 13thWorkshop on. IEEE, 2016, pp. 1�6.
[8] Mike Hazas and Andy Hopper, �Broadband ultrasoniclocation systems for improved indoor positioning,� IEEE
Transactions on mobile Computing, vol. 5, no. 5, pp. 536�547, 2006.
[9] Yasuhiro Fukuju, Masateru Minami, Hiroyuki Morikawa,and Tomonori Aoyama, �Dolphin: An autonomous in-door positioning system in ubiquitous computing envi-ronment.,� WSTFES, vol. 3, pp. 53, 2003.
[10] Erwin Aitenbichler and Max Muhlhauser, �An ir localpositioning system for smart items and devices,� in Dis-tributed Computing Systems Workshops, 2003. Procee-dings. 23rd International Conference on. IEEE, 2003, pp.334�339.
[11] Chunhan Lee, Yushin Chang, Gunhong Park, JaeheonRyu, Seung-Gweon Jeong, Seokhyun Park, Jae WhePark, Hee Chang Lee, Keum-shik Hong, and Man HyungLee, �Indoor positioning system based on incident anglesof infrared emitters,� in Industrial Electronics Society,2004. IECON 2004. 30th Annual Conference of IEEE.IEEE, 2004, vol. 3, pp. 2218�2222.
[12] Jongbae Kim and Heesung Jun, �Vision-based locationpositioning using augmented reality for indoor naviga-tion,� IEEE Transactions on Consumer Electronics, vol.54, no. 3, 2008.
[13] Fazli Subhan, Halabi Hasbullah, Azat Rozyyev, andSheikh Tahir Bakhsh, �Indoor positioning in bluetoothnetworks using �ngerprinting and lateration approach,�in Information Science and Applications (ICISA), 2011International Conference on. IEEE, 2011, pp. 1�9.
[14] Paul K Yoon, Shaghayegh Zihajehzadeh, Bong-Soo Kang,and Edward J Park, �Adaptive kalman �lter for indoorlocalization using bluetooth low energy and inertial mea-surement unit,� in Engineering in Medicine and BiologySociety (EMBC), 2015 37th Annual International Con-ference of the IEEE. IEEE, 2015, pp. 825�828.
[15] Markus Koühne and Jürgen Sieck, �Location-based ser-vices with ibeacon technology,� in Arti�cial Intelligence,Modelling and Simulation (AIMS), 2014 2nd Internatio-nal Conference on. IEEE, 2014, pp. 315�321.
[16] Inc. Bluetooth SIG, �Bluetooth core version4.2,� https://www.bluetooth.com/specifications/adopted-specifications, 2014, Accedido: 25-05-2017.
[17] Sheng Zhou and John K Pollard, �Position measurementusing bluetooth,� IEEE Transactions on Consumer Elec-tronics, vol. 52, no. 2, pp. 555�558, 2006.
[18] �RDNest SL.,� https://www.rdnest.com, Accedido: 25-05-2017.