v/ - biblioteca.unac.edu.pebiblioteca.unac.edu.pe/biblioteca_virtual/archivos/textos/1.pdf ·...
78
® • 2015 UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA INSTITUTO DE INVESTIGACION v/ DE LA FACUL TAO DE INGENIERIA ELECTRICA Y ELECTRONICA INFORME FINAL DEL TEXTO ( "TEXTO: MODELADO MATEMÁTICO DE t/ SISTEMAS DINÁMICOS" AUTOR: JUUO CESAR BORJAS CASTAÑEDA PERIODO DE EJECUCION: 01 de abril del 2014 al 31 de marzo del 2015 / RESOLUCION DE APROBACION: RR No 314-2014-R / CALLAO, 2015
Transcript of v/ - biblioteca.unac.edu.pebiblioteca.unac.edu.pe/biblioteca_virtual/archivos/textos/1.pdf ·...
® • ~ 2015
UNIVERSIDAD NACIONAL DEL CALLAO
FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA ~
INSTITUTO DE INVESTIGACION v/ DE LA FACUL TAO DE INGENIERIA ELECTRICA Y ELECTRONICA
INFORME FINAL DEL TEXTO (
"TEXTO: MODELADO MATEMÁTICO DE t/ SISTEMAS DINÁMICOS"
AUTOR: JUUO CESAR BORJAS CASTAÑEDA ~ PERIODO DE EJECUCION: 01 de abril del 2014 al 31 de marzo del 2015 /
RESOLUCION DE APROBACION: RR No 314-2014-R /
CALLAO, 2015
l. INDICE /
Lista de figuras -./"
11. INTRODUCCION \/"
111. ' CONTENIDO ./
INDICE
Capitulo 1. Modelado matemático de sistemas dinámicos
1.1 Modelo matemático
1.2 Función de transferencia
1.3 Diagrama de bloques
1.4 Modelado en el espacio de estados
1.5 Linealización de modelos matemáticos no lineales
Capítulo 2. Sistemas mecánicos
2.1 Sistemas mecánicos traslacionales
2.2 Sistemas mecánicos rotacionales
2.3 Sistemas mecánicos traslacional-rotacional
Capítulo 3. Sistemas eléctricos y electrónicos
3.1 Sistemas eléctricos
3.2 Sistemas electrónicos
Capítulo 4. Sistemas de fluidos y sistemas ténnicos
4.1 Sistemas de nivel de liquido
4.2 Sistemas neumáticos e hidráulicos
4.3
IV.
V.
VI.
Sistemas ténnicos /
REFERENCIALE}-'
APENDICES
ANEXOS /
1
2
3
4
4
4
9
10
11
15
18
19
34
42
54
54
58
62
62
66
70
73
74
76
1
Figura No 1.1 Figura No 1.2 Figura No 1.3 Figura No 2.1 Figura N° 2.2 Figura N° 2.3 Figura No 2.4 Figura No 2.5 Figura N° 2.6 Figura No 2. 7 Figura N° 2.8 Figura No 2.9 Figura No 2.1 O Figura No 2.11 Figura No 2.12 Figura No 2.13 Figura No 2.14 Figura No 2.15 Figura No 2.16 Figura No 2.17 Figura No 2.18 Figura No 2.19 Figura No 2.20 Figura No 2.21 Figura No 2.22 Figura N° 2.23 Figura No 2.24 Figura No 3.1 Figura No 3.2 Figura No 3.3 Figura No 3.4 Figura No 3.5 Figura No 3.6 Figura N° 4.1 Figura No 4.2 Figura No 4.3 Figura N° 4.4
LISTA DE FIGURAS
Paracaidista en cafda libre Elemento de un diagrama de bloques Sistema de control multivariable MIMO Elementos mecánicos traslacionales Movimiento de un cohete Sistema mecánico masa resorte Sistema mecánico masa resorte amortiguador Sistema mecánico acoplado Diagrama de cuerpo libre Sistema mecánico acoplado Máquina de Atwood Péndulo doble Péndulo ffsico doble Elementos mecánicos rotacionales Masa rotacional Rotor en medio viscoso Sistema rotacional acoplado Un par de engranajes dentados Un rotor de motor y carga acoplada Movimiento de la mano Péndulo invertido y carro Grúa puente con carga colgante Diagrama de cuerpo libre carro--grúa Diagrama de cuerpo libre del péndulo Sistema masa-resorte-péndulo Péndulo amortiguador Péndulo simple Elementos eléctricos Circuito serie RLC Circuito RC de dos etapas Circuito amplificador con operacional Filtro T Circuito electrónico T con direcciones de corriente Sistema de nivel Sistema de nivel de dos tanques Sistema de presión Sistema térmico
5 10 13 20 20 22 24 25 25 27 29 30 32 34 34 35 36 37 38 39 42 45 46 46 48 50 53 54 55 56 58 60 61 62 64 67 70
2
11. INTRODUCCION
El texto presenta las técnicas matemáticas para la obtención de modelos
matemáticos de los sistemas dinámicos. Aplicando la Segunda Ley de Newton, las
Ecuaciones de lagrange y otras definiciones de la Física Clásica se obtiene las
ecuaciones diferenciales que rigen el movimiento, tanto de traslación, rotación o una
combinación de ambos. En el caso de los sistemas eléctricos, las ecuaciones
dinámicas se hallan aplicando las leyes de Kircchoff, propiedades de la Ley de Ohm
y teoremas de análisis de los circuitos eléctricos. En el caso de los sistemas
electrónicos se incluye el Operacional como dispositivo lineal para la obtención de la
dinámica del sistema, adicionando la ganancia correspondiente.
Este texto está escrito para estudiantes de ingeniería de Pregrado (eléctrica,
electrónica y otra especialidades) y también para estudiantes de Postgrado, con la
finalidad de que se pueda utilizar como texto para el modelamiento de los procesos
o plantas, objetos de control.
Las ecuaciones dinámicas encontradas, están listas para su análisis tanto como
función de transferencia, como su análisis en ecuaciones de estado y de esta manera
observar su comportamiento ante una señal de prueba y así determinar la estabilidad
del sistema para el caso de sistemas lineales e invariantes con el tiempo. También
se toca el caso de sistemas no lineales y se conduce a su linealización.
El texto está organizado en 4 capítulos. A continuación se describe brevemente el
contenido de cada capitulo. El capitulo 1 presenta las definiciones preliminares del
modelado matemático de sistemas dinámico. El capitulo 2 aborda los sistemas
mecánicos. El capitulo 3 trata de los sistemas eléctricos y electrónicos y el capitulo
4 trata de los sistemas de fluidos y de los sistemas térmicos.
Se ha incluido figuras que detallan el sistema del cual se quiere encontrar su modelo
matemático; estas han sido elaboradas con el software Visio.
3

111. CONTENIDO
CAPITULOI
MODELADO MATEMATICO DE SISTEMAS DINAMICOS
1.1 MODELO MATEMATICO
Un modelo matemático se define, de manera general, como una formulación o una
ecuación que expresa las características esenciales de un sistema ffsico o de un
proceso en términos matemáticos. En general el modelo se representa mediante una
relación funcional de la forma:
variable ( variables funciones ) d d . = f . d nd" ,parametros, d f epen tente m epe lentes e uerza
Donde:
variable dependiente = comportamiento o estado de un sistema variable independiente = dimensiones que determinan el comportamiento
(1.1)
parámetros = reflejo de las propiedades o la composicion del sistema funciones de fuerza = influencias externas que actuan sobre el sistema
La expresión matemática ( 1.1) va desde una simple relación algebraica hasta un
enorme y complicado grupo de ecuaciones diferenciales. Por ejemplo, la segunda
ley Newton del movimiento, la cual establece que la razón de cambio del momentum
con respecto al tiempo de un cuerpo, es igual a la fuerza resultante que actúa sobre
él. Le expresión matemática, o el modelo, de la segunda ley es la conocida ecuación
F = ma, donde F es la fuerza neta que actúa sobre el objeto, m es la masa del objeto
y a es su aceleración. La segunda ley puede escribirse de la forma
F a=- (1.2)
m Donde a es la variable dependiente que refleja el comportamiento del sistema, F es
la función de fuerza y m es un parámetro que representa una propiedad del sistema.
Obsérvese que en este caso especifico no existe variable independiente porque aún
no se predice como varia la aceleración con respecto al tiempo o al espacio.
4

La ecuación posee varias de las características típicas de los modelos matemáticos
del mundo físico:
1. Describe un proceso o sistema natural en términos matemáticos.
2. Representa una idealización y una simplificación de la realidad. Es decir, ignora
los detalles insignificantes del proceso natural y se concentra en sus
manifestaciones esenciales. Por ende, la segunda ley de Newton no incluye los
efectos de la relatividad, que tienen una importancia cuando se aplica a objetos y
fuerzas que interactúan sobre o alrededor de la superficie de la Tierra, a
velocidades y en escalas visibles a los seres humanos.
3. Finalmente, conduce a resultados reproducibles y, en consecuencia, llega a
emplearse con la finalidad de predecir. Por ejemplo, dada la fuerza aplicada sobre
un objeto de masa conocida, la ecuación se emplea para calcular la aceleración.
Debido a su forma algebraica sencilla, la solución de la ecuación se obtiene con
facilidad. Sin embargo, es posible que otros modelos matemáticos de fenómenos
físicos sean mucho más complejos y no se resuelven con exactitud, o que requieran
para su solución de técnicas matemáticas más sofisticadas que la simple algebra.
Para ilustrar un modelo más complicado de este tipo, se utiliza la segunda ley de
Newton para determinar la velocidad final de la caída libre de un cuerpo que se
encuentra cerca de la superficie de la tierra. Nuestro cuerpo en caída libre será el de
un paracaidista, como se muestra en la ftgura 1.1
Figura 1.1 Paracaidista en caída libre
Fv
m
Fd
S

Un modelo para este caso se obtiene expresando la aceleración como la razón de
cambio de la velocidad con respecto al tiempo.
dv F=ma=m-dt
Donde ves la velocidad de caída del paracaidista, m es la masa, Fes la fuerza
resultante, Fa es la fuerza hacia abajo debida a la atracción de la gravedad y F, es la
fuerza hacia arriba debida a la resistencia del aire.
Fa=mg
F11 = CV
Aquí e es el coeficiente de resistencia o arrastre.
Fa -F11 =ma
dv mg-cv=m
dt dv
--c....-- = dt g--v m
f d ~fñ V - g) = - .:_ f dt mv-g m
ln (~ v - g) = -: t + In( K)
ln(: v- g) = ln( e-~t) + ln(K) = ln(Ke-~t) e ~ -v-g=Ke m m
Inicialmente el paracaidista esta en reposo, es decir v = O en t = O entonces K = - g
Resolviendo se encuentra que
mg( ct) v=c 1-em (1.3)
Note que la ecuación (1.3) obtenida es un ejemplo de la forma general de ecuación
modelo, donde v = v(t) es la variable dependiente, tes la variable independiente, e
y m son parámetros y g es la función de fuerza. A la ecuación obtenida se le llama
solución analítica o exacta ya que satisface con exactitud la ecuación diferencial
6

original. Por desgracia, hay muchos modelos matemáticos que no pueden resolverse
con exactitud. En muchos de estos casos, la única alternativa consiste en desarrollar
una solución numérica que se aproxime a la solución exacta. Como ya se mencionó,
los métodos numéricos son aquellos en los que se reformula el problema matemático
para lograr resolverlo mediante operaciones aritméticas. Esto puede ilustrarse para
el caso de la segunda ley de Newton, observando que la razón de cambio de la
velocidad con respecto al tiempo se puede aproximar por el método de Euler,
mediante:
dv .L\v v(t¡+1) - v(t¡) -:::-=-..;..;...;;; __ _.;.... dt .L\t ti+1 - t¡
(1.4)
Donde Av y At son diferencias en la velocidad y en el tiempo, respectivamente,
calculadas sobre intervalos finitos, v(t¡) es la velocidad en el tiempo inicial t¡ y v(ti+1)
es la velocidad algún tiempo más tarde ti+1· A la ecuación anterior se le denomina
una aproximación en diferencia finita dividida de la derivada en el tiempo t¡.
Sustituyendo en la ecuación, tenemos
v(tt+l)- v(t¡) e ) -----= g- -v(tt
ti+1 - tt m
v(tt+t) = v(t¡) + [o-~ v(tD] (tt+t - t¡) (1.5)
v[i + 1] = v[i] +[o-~ v[i]] (t[i + 1]- t[i]) (1.6)
Note que el termino entre corchetes en el lado derecho de la propia ecuación
diferencial. Es decir, este término nos da un medio para calcular la razón de cambio
o la pendiente de v. Así, la ecuación diferencial se ha transformado en una ecuación
que puede utilizarse para determinar algebraicamente la velocidad en tt+t usando la
pendiente y los valores anteriores de v y t. Si se da un valor inicial para la velocidad
en algún tiempo t¡, es posible calcular con facilidad la velocidad en un tiempo
posterior tt+t· Este nuevo valor de la velocidad en ti+t sirve para calcular la velocidad
en tt+z y asi sucesivamente. Es decir, a cualquier tiempo,
valor nuevo= valor anterior+ pendiente x tamaño del paso (1.7)
Obsérvese que esta aproximación formalmente se conoce como método de Euler.
7

Los modelos matemáticos pueden adoptar muchas formas distintas. Dependiendo
del sistema del que se trate y de las circunstancias específicas, un modelo
matemático puede ser más conveniente que otros. Por ejemplo, en problemas de
control optimo, es provechoso usar representaciones en el espacio de estados. En
cambio, para los análisis de la respuesta transitoria o dela respuesta en frecuencia
de sistemas lineales con una entrada y una salida invariantes en el tiempo, la
representación mediante la función de transferencia puede ser más conveniente que
cualquier otra. Una vez obtenido un modelo matemático de un sistema, se usan
diversos recursos analiticos, asf como computadoras para estudiarlo y sintetizarlo.
Simplicidad contra precisión. Al obtener un modelo matemático se debe establecer
un compromiso entre la simplicidad del mismo y la precisión de los resultados del
análisis. Al obtener un modelo matemático razonablemente simplificado, a menudo
resulta necesario ignorar ciertas propiedades físicas inherentes al sistema. En
particular, si se pretende obtener un modelo matemático de parámetros
concentrados lineal (es decir, uno en el que se empleen ecuaciones diferenciales),
siempre es necesario ignorar ciertas no linealidades y parámetros distribuidos que
pueden estar presentes en el sistema dinámico. Si los efectos que estas propiedades
ignoradas tienen sobre la respuesta son pequet'ios, se obtendrá un buen acuerdo
entre los resultados del análisis de un modelo matemático y los resultados del estudio
experimental del sistema físico. Se debe ser consciente de que un modelo de
parámetros concentrados lineal, que puede ser válido si opera a bajas frecuencias,
tal vez no sea válido en frecuencias suficientemente altas, debido a que la propiedad
no considerada de los parámetros distribuidos puede convertirse en un factor
importante en el comportamiento dinámico del sistema.
Sistemas lineales. Un sistema se denomina lineal si se aplica el principio de
superposición. Este principio establece que la respuesta producida por la aplicación
simultánea de dos funciones de entradas diferentes es la suma de las dos respuestas
individuales. Por tanto, para el sistema lineal, la respuesta a varias entradas se
calcula tratando una entrada cada vez y sumando los resultados.
8

Este principio permite desarrollar soluciones complicadas para la ecuación
diferencial lineal a partir de soluciones simples. Si en una investigación experimental
de un sistema dinámico son proporcionales la cusa y el efedo, lo cual implica que se
aplica el principio de superposición, el sistema se considera lineal.
Sistemas lineales invariantes y variantes en el tiempo. Una ecuación diferencial
es lineal si sus coeficientes son constantes o son funciones solo de la variable
independiente. Los sistemas dinámicos formados por componentes de parámetros
concentrados lineales invariantes con el tiempo se describen mediante ecuaciones
diferenciales lineales invariantes en el tiempo (de coeficientes constantes). Tales
sistemas se denominan sistemas lineales invariantes en el tiempo (o lineales de
coeficientes constantes). Los sistemas que se representan mediante ecuaciones
diferenciales cuyos coeficientes son funciones del tiempo se denominan sistemas
lineales variantes en el tiempo. Un ejemplo de un sistema de control variante en el
tiempo es un sistema de control de naves espaciales. (La masa de una nave espacial
cambia debido al consumo de combustible.)
1.2 FUNCION DE TRANSFERENCIA
La función de transferencia de un sistema descrito mediante una ecuación diferencial
lineal e invariante en el tiempo se define como el cociente entre la transformada de
Laplace de la salida (función de respuesta) y la transformadas de Laplace de la
entrada (función excitación) bajo la suposición de que todas las condiciones iniciales
son cero.
. . L[salida] Y(s) Func1.on de transferencla = G(s) =.![entrada] = X(s) (1.8)
A partir del concepto de función de transferencia es posible representar la dinámica
de un sistema mediante ecuaciones algebraicas en s. si la potencia más alta de sen
el denominador de la función de transferencia es igual a n, el sistema se denomina
sistema de orden n-ésirño.
9
Comentarios acerca de la función de transferencia.
1. la función de transferencia de un sistema es un modelo matemático porque
es un método operacional para expresar la ecuación diferencial que relaciona la
variable de salida con la variable de entrada.
2. la función de transferencia es una propiedad de un sistema, independiente
de la magnitud y naturaleza de la entrada o función de excitación.
3. la función de transferencia incluye las unidades necesarias para relacionar la
entrada con la salida; sin embargo no proporciona información acerca de la
estructura física del sistema.
4. Si se conoce la función de transferencia de un sistema, se estudia la salida o
respuesta para varias formas de entrada, con la intención de comprender la
naturaleza del sistema.
5. Si se desconoce la función de transferencia de un subsistema, puede
establecerse experimentalmente introduciendo entradas conocidas y estudiando la
salida del sistema. Una vez establecida una función de transferencia, proporciona
una descripción completa de las caracteristicas dinámicas del sistema, a diferencia
de su descripción fisica.
1.3 DIAGRAMAS DE BLOQUES
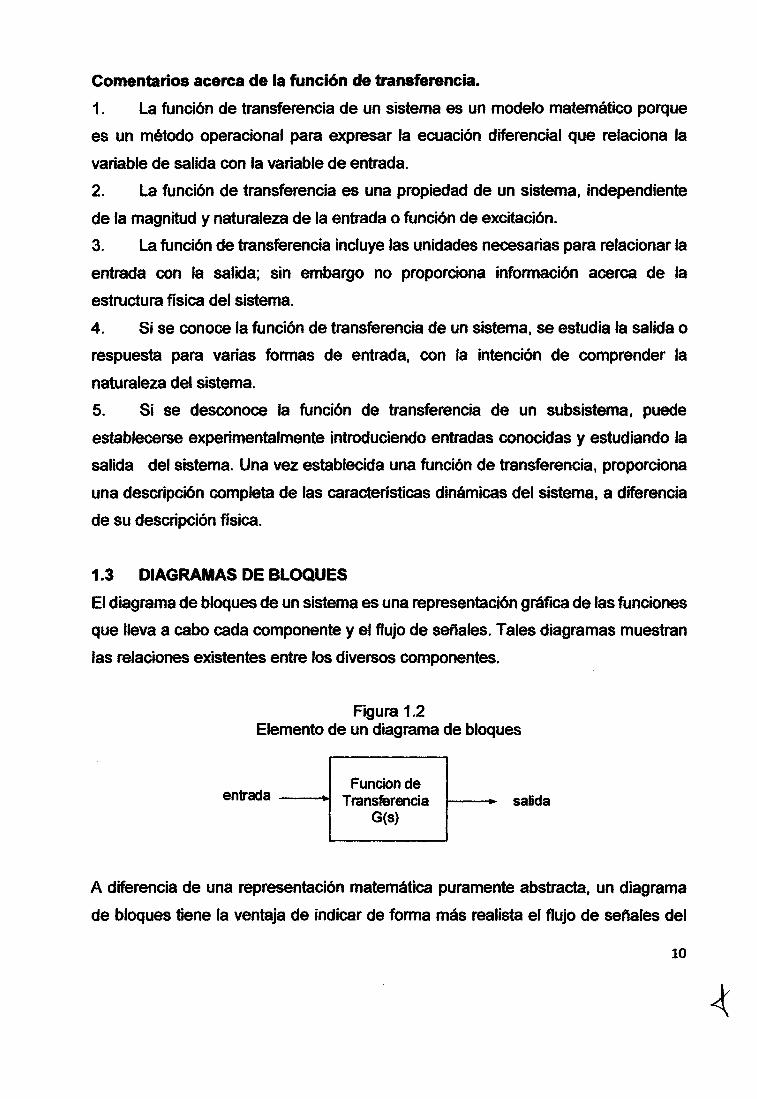
El diagrama de bloques de un sistema es una representación gráfica de las funciones
que lleva a cabo cada componente y el flujo de senales. Tales diagramas muestran
las relaciones existentes entre los diversos componentes.
Figura 1.2 Elemento de un diagrama de bloques
entrada ---.~ Funcion de
Transferencia G(s)
salida
A diferencia de una representación matemática puramente abstracta, un diagrama
de bloques tiene la ventaja de indicar de forma más realista el flujo de senales del
10

sistema real. En un diagrama de bloques todas las variables del sistema se enlazan
unas con otras mediante bloques funcionales. El bloque funcional o simplemente
bloque es un símbolo para representar la operación matemática que sobre la señal
de entrada hace el bloque para producir la salida. Un diagrama de bloques contiene
información relacionada con el comportamiento dinámico, pero no incluye
información de la construcción física del sistema. En consecuencia, muchos sistemas
diferentes y no relacionados pueden representarse mediante el mismo diagrama de
bloques.
1.4 MODELADO EN EL ESPACIO DE ESTADOS
La tendencia moderna en los sistemas de ingeniería es hacia una mayor
complejidad, debido sobre todo a que se requieren tareas más complejas y buena
precisión. Los sistemas complejos pueden tener múltiples entradas y múltiples
salidas y pueden ser variantes en el tiempo. Debido a la necesidad de cumplir
requisitos cada vez más exigentes en el comportamiento de los sistemas de control,
el aumento de la complejidad del sistema y el fácil acceso a la computadora a gran
escala, la teoría moderna de control, que es una nueva aproximación al análisis y
diseno de los sistemas de control complejo, se ha desarrollado desde 1960. Esta
nueva aproximación se basa en el concepto de estado. El concepto de estado por si
mismo no es nuevo, puesto que ha existido durante bastante tiempo en el campo de
la dinámica clásica y en otros campos.
Estado. El estado de un sistema dinámico es el conjunto de variables más pequeño
(llamadas variables de estado), de forma que el conocimiento de estas variables en
t = t0 , junto con el conocimiento de la entrada para t ~ t0 , determinan
completamente el comportamiento del sistema en cualquier tiempo t ~ t 0 .
Variables de estado. Las variables de un sistema dinámico son las variables que
constituyen el menor conjunto de variables que determinan el estado del sistema
dinámico. Si al menos se necesitan n variables x1, x2, ••• , xn para describir
completamente el comportamiento de un sistema dinámico (de forma que una vez
11

que la entrada para t > t0 esta dada y el estado inicial en t = t0 esta especificado,
el estado futuro del sistema está determinado completamente), entonces tales n
variables son un conjunto de variables de estado.
Vector de estado. Si se necesitan n variables de estado para describir
completamente el comportamiento de un sistema dado, entonces esas n variables
de estado se pueden considerar como las n componentes de un vector x. este vector
se denomina vector de estado. Un vector de estado es, por lo tanto, un vector que
determina univocamente el estado del sistema x(t) en cualquier instante del tiempo
t > t 0 especificado.
Espacio de estados. El espacio n-dimensional cuyos ejes coordenados están
formados por el eje x1 , eje x2 , ... , eje Xn donde x1, x2, ..• Xn son las variables de estado,
se denomina espacio de estados. Cualquier estado se puede repres4entar como un
punto en el espacio de estados.
Ecuaciones en el espacio de estados
El estado de un sistema se describe por el conjunto de ecuaciones diferenciales de
primer orden escritas en función de las variables de estado (x1, x2, ... Xn). Estas
ecuaciones pueden escribirse de forma general como
f1 = au X1 + a12Xz + ··· + a1nXn + bu U1 + ··· + b1m Um
Xz = a21X1 + azzXz + ··· + aznXn + bz1U1 + ··· + bzmUm
En forma matricial
[~1] [au x2 _ a21 . - . . . . . Xn an1
(1.9)
12

La matriz de columnas formada por las variables de estado se denomina vector de
estado y se escribe
{1.10)
El vector de las senales de entrada se define como u. Entonces el sistema puede
representarse en forma compacta de la ecuación diferencial de estados como
x =Ax+Bu {1.11)
Esta ecuación suele denominarse ecuación de estado. Donde A es una matriz
cuadrada de n x n y B es una matriz den x m. En general, las salidas de un sistema
lineal pueden relacionarse con las variables de estado y con las senales de entrada
por la ecuación de salida
y= Cx+Du {1.12)
La figura 1.3 es la representación en diagramas de bloque de la ecuación de estado
y la ecuación de salida.
Figura 1.3 Sistema de control multivariable MIMO
• + y
13

Correlación entre funciones de transferencia y ecuaciones en el espacio de estados
A continuación se obtendrá la función de transferencia de un sistema con una sola
entrada y una sola salida a partir de las ecuaciones en el espacio de estados.
x =Ax+8u
y=Cx+Du
Tomando transformadas de laplace a estas ecuaciones, se obtiene
sX(s)- x(O) = AX(s) + 8u(s)
Y(s) = CX(s) + DU(s)
X(s) = (si- A)-1x(O) +(si- A)-18U(s)
Y(s) = C(si- A)-1x(O) + C(si- A)-1x(0)8U(s) + DU(s)
Si la condición inicial x(O) = o X(s) =(si- A)-18U(s)
Y(s) = C(si- A)-1x(0)8U(s) + DU(s)
la función de transferencia será
Y(s) = C(sl- A)-18 + D U(s)
(1.13)
A manera de aplicación, sea un sistema definido por las siguientes ecuaciones en el
espacio de estado
x =[~S =~]x +[~]u y= [1 2]x
En este caso D =O, por lo que, la función de transferencia en lazo cerrado será
T(s) = C(sl- A)-18
si -A = [s + S 1 ] -3 s+l
14

( l A)-1 1 [s + 1 -1 ] s - = (s + S)(s + 1) + 3 3 s + 5
1 [S + 1 -1 ] [2] T(s) = (s + S)(s + 1) + 3 [1 2] 3 s + 5 5
1 ( 2s- 3] T(s)=s2+6s+8[1 2] 5s+31
12s +59 T(s) = -:s2~+-6s_+_8
1.5 LINEALIZACION DE MODELOS MATEMATICOS NO LINEALES
Sistemas no lineales. Un sistema es no lineal si no se aplica el principio de
superposición. Por tanto, para un sistema no lineal la respuesta a dos entradas no
puede calcularse tratando cada entrada a la vez y sumando los resultados.
Aunque muchas relaciones físicas se representan a menudo mediante ecuaciones
lineales, en la mayor parte de los casos las relaciones reales no son verdaderamente
lineales. De hecho, un estudio cuidadoso de los sistemas físicos revela que incluso
los llamados "sistemas lineales" solo lo son en rango de operación limitados. En la
práctica muchos sistemas electromecánicos, hidráulicos, neumáticos, etc.,
involucran relaciones no lineales entre las variables. Por ejemplo la salida de un
componente puede saturarse para senales de entrada grandes. Puede haber una
zona muerta que afecte a las sefiales pequenas. (La zona muerta de un componente
es un rango pequeño de variaciones de entrada a las cuales el componente es
insensible.) Puede ocurrir una no linealidad de ley cuadrática en algunos
componentes. Por ejemplo, los amortiguadores que se utilizan en los sistemas físicos
pueden ser lineales para operaciones a baja velocidad, pero pueden volverse no
lineales a altas velocidades, y la fuerza de amortiguamiento puede hacerse
proporcional al cuadrado de la velocidad de operación.
Linealización de sistemas no lineales. En la ingenierfa de control, una operación
normal del sistema puede ocurrir alrededor de un punto de equilibrio, y las senales
15

pueden considerarse pequeñas alrededor del equilibrio. (Debe señalarse que hay
muchas excepciones a tal caso.) Sin embargo, si el sistema opera alrededor de un
punto de equilibrio y si las señales involucradas son pequeñas, es posible aproximar
el sistema no lineal mediante un sistema lineal. Este sistema lineal es equivalente al
sistema no lineal, considerando dentro de un rango de operación limitado. Tal modelo
linealizado (lineal e invariante con el tiempo) es muy importante en la ingeniería de
control.
El procedimiento de Linealización que se presenta aquí se basa en el desarrollo de
la función no lineal en series de Taylor alrededor del punto de operación y la retención
solo del ténnino lineal. Debido a que no se consideran los términos de orden superior
del desarrollo en serie de Taylor, estos términos no considerados deben ser
suficientemente pequeños; es decir, las variables solo se desvían ligeramente de la
condición de operación.
Aproximación lineal de modelos matemáticos no lineales. Con la finalidad de
obtener un modelo matemático lineal para un sistema no lineal, se supone que las
variables solo se desvían ligeramente de alguna condición de operación.
Considérese un sistema cuya entrada es x(t) y cuya salida es y(t). La relación entre
y(t) y x(t) se obtiene mediante
y=f(x)
Si la condición de operación normal corresponde a x, y , la ecuación es expande en
series de Taylor alrededor de ese punto, del modo siguiente
df 1 d 2/ y = f(x) = f(x) + dx (x- x) + 2! dx2 (x- x)2 + ... (1.14)
Donde las derivadas~· =~·· ... se evalúan en x = x. Si la variación x - x es pequeña,
es posible no considerar los términos de orden superior en x - x. Entonces tenemos
y = f(x) ~ f(x) + df (x- x) dx
y= y+K(x-x)
Donde y = f(x) y K = ~ en x = x
y-y= K(x-x)
16

Considérese un sistema no lineal cuya salida y es una función de dos entradas x1 y
x2 de modo que
Y= f(xl, Xz)
Con la finalidad de obtener una aproximación lineal para este sistema no lineal, es
posible expandir la ecuación en series de Taylor alrededor del punto de operación
normal x1, x2 , entonces la ecuación se convierte en
Y= f(X¡,Xz) + [:~ (xl- x1)- ::. (x2- Xz)]
1 ¡az¡ iJ2 az¡ l +- ~(x1- X1)2 + 2 (xl- X1)(x2- Xz) + - 2 (x2- Xz) 2 + ··· 2! iJx1 iJx1 OXz iJx2
(1.15}
Donde las derivadas parciales se evalúan en x1 = x1 y x2 = x2 . Cerca del punto de
operación normal, es posible no considerar los términos de orden superior.
A continuación, el modelo matemático lineal de este sistema no lineal alrededor de
la condición de operación normal se obtiene mediante
y- y= K1Cx1- x1) + K2Cx2- Xz) cony = !Cx1,x2)
K iJf _ - K iJf - -1 = -
0 enx1 = x1,x2 = x2 , 2 = -
0 enx1 = x1,x2 = x2
x1 ' Xz
Como ejemplo se linea liza la ecuación no lineal z = xy, en la región
5 <X< 7, 10 S x S 12.
Se pide encontrar el error si la ecuación linealizada se utiliza para calcular el valor
de z cuando x=5 e y=10. Escogiendo x = 6,y = 11 entonces z = xy = (6)(11) = 66.
Se va a obtener la ecuación linealizada alrededor del punto x = 6,y = 11.
Desarrollando la ecuación no lineal en series de Taylor alrededor del punto x, y sin
considerar los términos de orden más aHos, se tiene
z- z = a(x - x) + b(y- y)
iJ(xy) iJ(xy) a = = y = 11, b = - = x = 6
iJx iJy
z- 66 = 11(x- 6) + 6(y- 11)
Cuando x=5, y=10 entonces z = 66 + 11(5- 6) + 6(10- 11) = 49
El valor exacto de z es 50. El error es, por lo tanto, 50-49 = 1. En términos de
porcentaje el error es del 2%.
17
CAPITULO 11
SISTEMAS MECANICOS
En esta sección se analizara el modelo matemático de los sistemas mecánicos. La
ley fundamental que controla los sistemas mecánicos es la segunda ley de Newton,
que se aplica a cualquier sistema mecánico. También se aplicara la ecuación de
Lagrange para deducir las ecuaciones del movimiento usando energías potenciales
y cinéticas.
Segunda ley de Newton.
La derivada del momento lineal o ímpetu de un cuerpo respecto al tiempo es igual a
la fuerza que actúa sobre él, es decir
F=p (2.1)
Donde p = mv es el momento, m es la masa y v la velocidad. Esta ecuación se usa
cuando la masa es variable como ocurre en los cohetes. Pero cuando la masa es
constante, entonces
. d(mv) dv d2x F=p= =m-=ma=m-
dt dt dt2 (2.2)
donde a es la aceleración y x es el desplazamiento
Ecuaciones de Lagrange de movimiento
Considerando un sistema con N grados de libertad que se describe por medio de un
conjunto de N coordenadas generalizadas q¡ para i = 1. 2 • .... N. Estas coordenadas
son irrestrictas e independientes; es decir no están relacionadas entre si por medio
de condiciones geométricas o cinemáticas. Entonces, en términos de las
coordenadas generalizadas elegidas, las ecuaciones de Lagrange tiene la forma
j = 1.2 • ..... N (2.3)
18

donde i¡i son las velocidades generalizadas, T es la energía cinética del sistema, V
es la energía potencial, O es la función de disipación de Rayleigh y Qi es la fuerza
generalizada que aparece en la j-ésima ecuación.
Las fuerzas generalizadas Q i se obtienen con
~ orz ~ ow1 Qi = ¿Fz.~+ ¿Mz.-¡¡:-:
l q} l qJ (2.4)
donde F1 y Mt son las representaciones vectoriales de las fuerzas y los momentos
aplicados externamente, el índice l indica cual fuerza o momento externo se esta
considerando, r1 es el vector de posición para el lugar donde la fuerza se aplica y 6}z
es la velocidad angular del sistema con respecto al eje a lo largo del se aplica el
momento considerado. El símbolo"." Que aparece en la ecuación indica el producto
escalar puntual de dos vectores.
Para sistemas conservativos
!!_(iJT)- iJT + iJD + iJV =O j = 1,2, .... ,N dt aqi aqi oqi aqi (2.5)
2.1 SISTEMAS MECANICOS TRASLACIONALES
Elementos mecánicos lineales traslacionales. En la figura siguiente se muestran
un conjunto de elementos mecánicos pasivos, suponiendo movimiento traslacional.
El primer elemento que se describe es un amortiguador viscoso. El amortiguador
viscoso traslacional se compone de un cilindro con un pistón móvil. El cilindro está
lleno con un fluido y un camino con restricción permite que el fluido retorne al lado
opuesto del pistón. Los amortiguadores viscosos producen una fuerza o par que
varian con la velocidad traslacional. Estos dispositivos disipan energia y no la
almacenan.
Los otros fenómenos que se muestran son relaciones para masas y resortes lineales.
La masa y los resortes almacenan energia como energia cinética o energía potencial,
respectivamente.
19
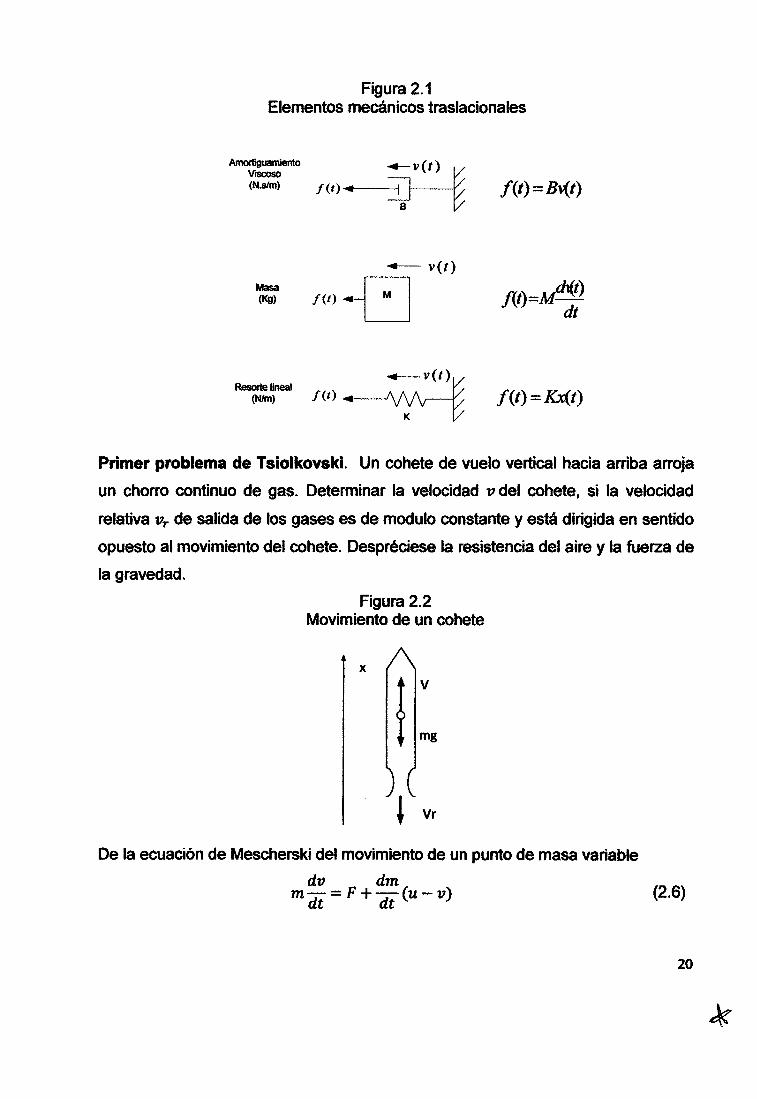
Figura 2.1 Elementos mecánicos traslacionales
- .. 1•(1) ~ Vrscoso (N.slm) f (t) -.~-- 1
B
Masa (Kg)
,.__ v(t)
f(t)-[J
f(t)=Bl(t)
f(t)=~t) dt
f(t)=Kx(t)
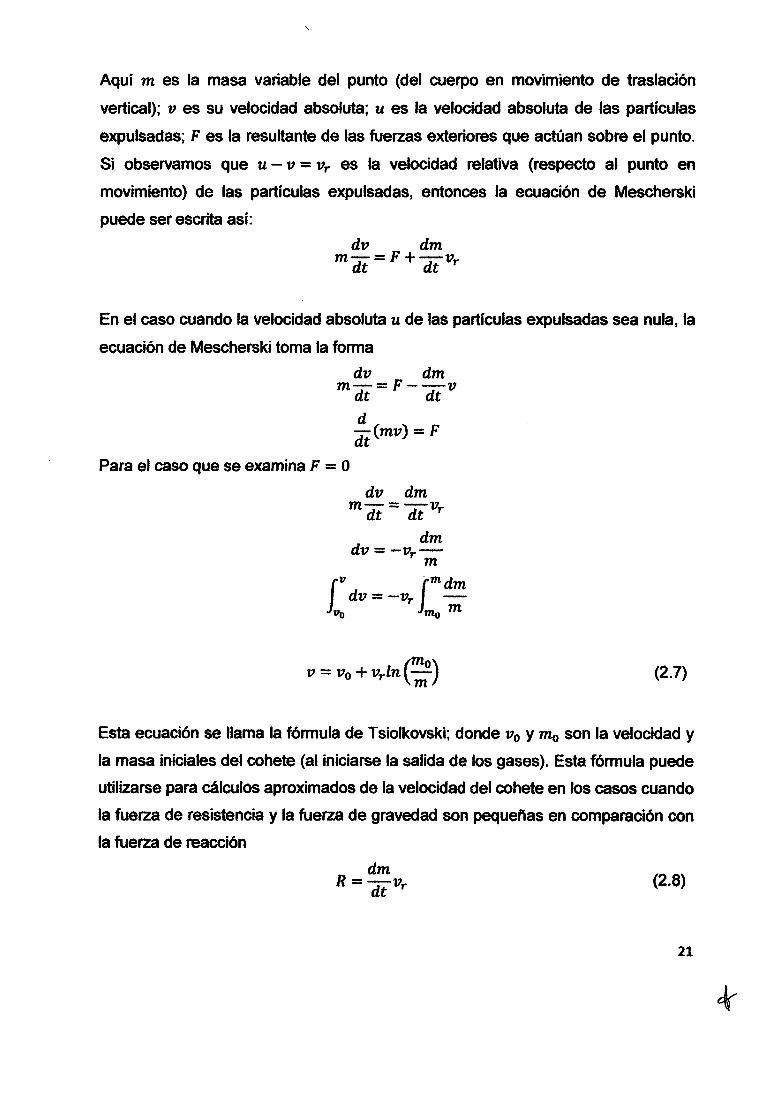
Primer problema de Tsiolkovski. Un cohete de vuelo vertical hacia arriba arroja
un chorro continuo de gas. Determinar la velocidad v del cohete, si la velocidad
relativa v7 de salida de los gases es de modulo constante y está dirigida en sentido
opuesto al movimiento del cohete. Despréciese la resistencia del aire y la fuerza de
la gravedad.
Figura 2.2 Movimiento de un cohete
X
t V
¡ mg
~ Vr
De la ecuación de Mescherski del movimiento de un punto de masa variable
dv dm m dt = F + dt (u - v) (2.6)
20
Aquí m es la masa variable del punto (del cuerpo en movimiento de traslación
vertical); ves su velocidad absoluta; u es la velocidad absoluta de las partículas
expulsadas; F es la resultante de las fuerzas exteriores que actúan sobre el punto.
Si observamos que u - v = vr es la velocidad relativa (respecto al punto en
movimiento) de las partículas expulsadas, entonces la ecuación de Mescherski
puede ser escrita así:
dv dm m-=F+-v dt dt r
En el caso cuando la velocidad absoluta u de las partículas expulsadas sea nula, la
ecuación de Mescherski toma la fonna
dv dm m-=F--v
dt dt d dt(mv) = F
Para el caso que se examina F = o dv dm
m-=-v. dt dt r
dm dv=-vr
m
Lv L. mdm dv=-vr -
vo mo m
V = v0 + Vrln (';:) (2.7)
Esta ecuación se llama la fónnula de Tsiolkovski; donde v0 y mo son la velocidad y
la masa iniciales del cohete (al iniciarse la salida de los gases). Esta fónnula puede
utilizarse para cálculos aproximados de la velocidad del cohete en los casos cuando
la fuerza de resistencia y la fuerza de gravedad son pequenas en comparación con
la fuerza de reacción
dm R=-v. dt r
(2.8)
21
Segundo problema Tsiolkovski. Se estudia el lanzamiento vertical de un cohete
tomando en cuenta la fuerza de gravedad. Las demás condiciones son las mismas
que en el primer problema. Supongamos que la parte adiva de la trayedoria no es
muy grande en comparación con el radio de la Tierra. Consideremos que la
aceleración de la fuerza de gravedad es constante e igual a su valor en la superficie
terrestre. La ecuación de Mescherski se escribirá en la forma siguiente:
dv dm m-=-mg--v dt dt T
dm dv= -gdt-v
T dt
J.: dv = -f.'[ u + v, ;j dt
V = Vo - gt + Vrln e::)
(2.9)
(2.10)
En particular, si es constante no solamente la velocidad relativa vr de salida de los
gases, sino también el gasto de estos rh =-p.= constante. Entonces
m=m0 -p.t
v = v0 - gt + Vrln ( mo ) m0 - p.t
Aqui p. es la masa que se gasta por unidad de tiempo.
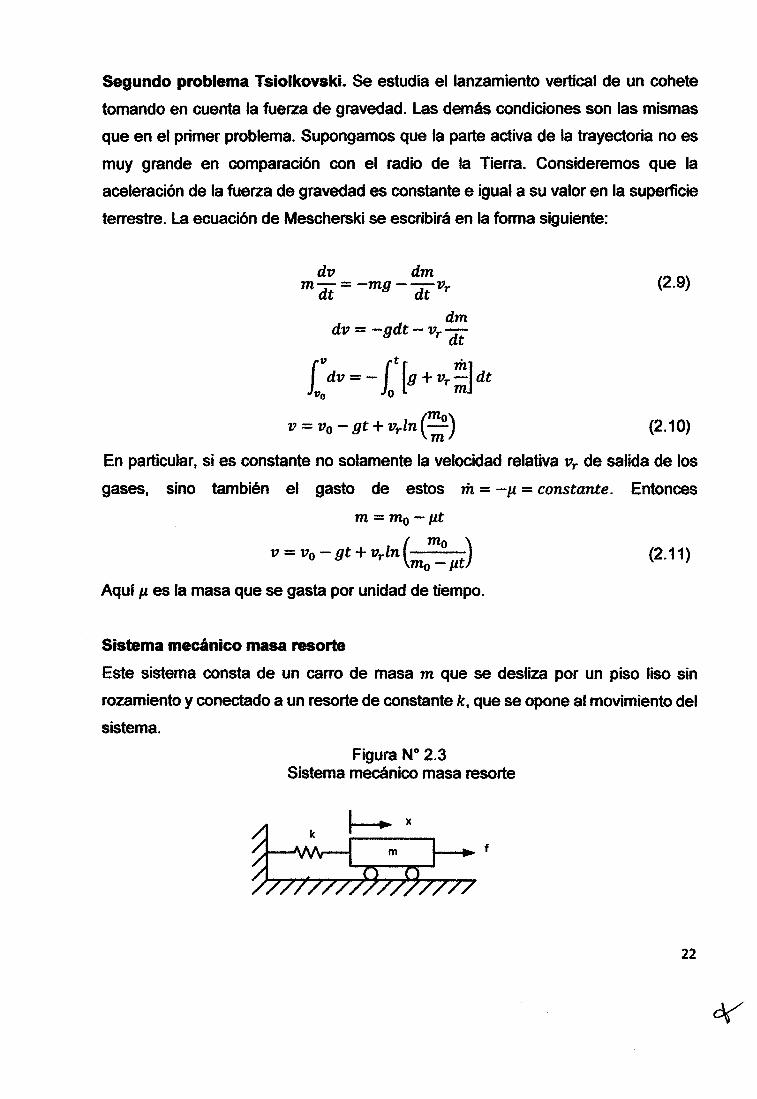
Sistema mecánico masa resorte
(2.11)
Este sistema consta de un carro de masa m que se desliza por un piso liso sin
rozamiento y conedado a un resorte de constante k, que se opone al movimiento del
sistema.
Figura No 2.3 Sistema mecánico masa resorte
22
m = masa del carro
f = fuerza aplicada al carro
k = constante del resorte
x = el desplazamiento
f~c = fuerza del resorte que se opone al movimiento
Por el método de la segunda ley de Newton
{- fk =mi
fk =kx
Reemplazando, encontramos la ecuación del movimiento
mx+kx=f
Aplicando la ecuación de Lagrange
d (oT) oT oD ov dt oq
1 - oq
1 + oq
1 + oq
1 = Q¡
d (oT) oT oD ov dt OX - OX + OX + OX = Qx
D = O, no hay amortiguador viscoso
La energía cinética es T = i mx2
La energía potencial es V = i kx2
ov -=kx ox oT OX =O
oT ox=m.X
.!!:_ (oT) = mx dt ox
Qx=f
Reemplazando, tenemos el mismo resultado que en (2.12)
m.X+kx=f
(2.12)
(2.13)
23
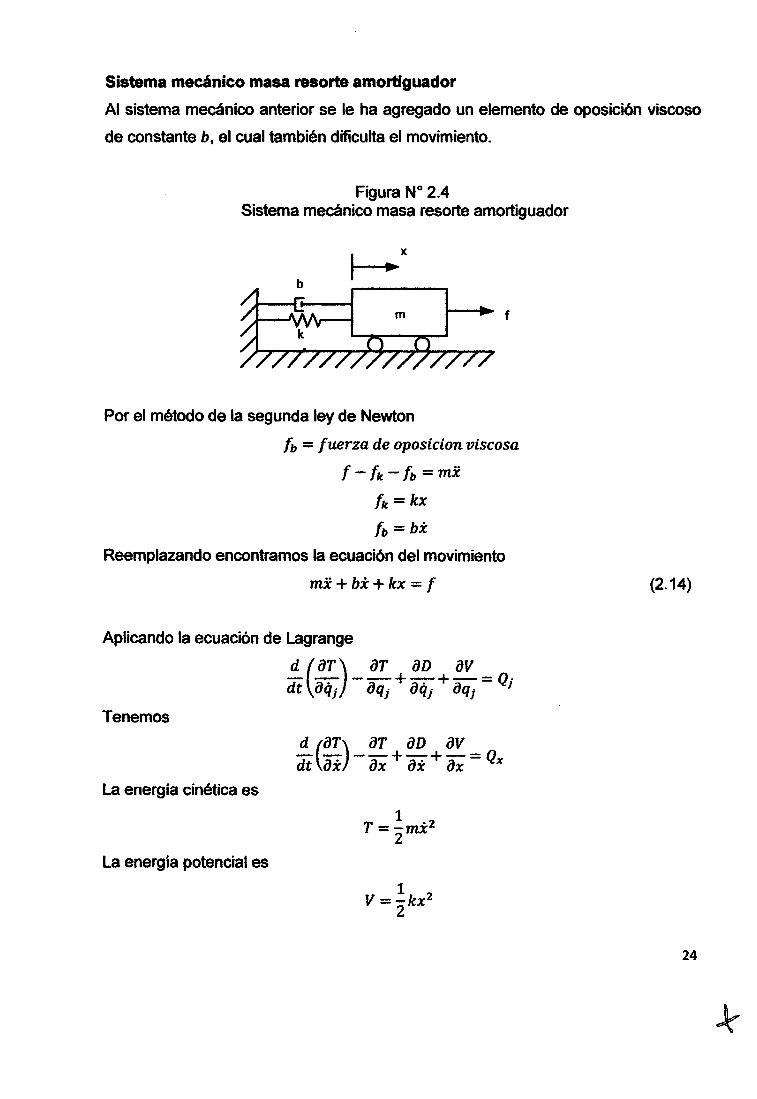
Sistema mecánico masa resorte amortiguador
Al sistema mecánico anterior se le ha agregado un elemento de oposición viscoso
de constante b, el cual también dificulta el movimiento.
Figura No 2.4 Sistema mecánico masa resorte amortiguador
b
f
Por el método de la segunda ley de Newton
lb = fuerza de oposicion viscosa
t- fk- lb =mx lk =kx
tb =bx Reemplazando encontramos la ecuación del movimiento
mx + bx + kx == f
Aplicando la ecuación de Lagrange
Tenemos
La energia cinética es
La energla potencial es
d ( iJT) iJT iJD iJV dt éJilj - éJqi + iJqi + éJqi = Qi
1 T =-mf2
2
1 V =-kx2
2
(2.14)
24
La función de disipación es
1 D =-bx2
2
éJD -=bx ax av -=kx éJx
éJT éJT éJx = O, ox = m:X
!!:.. (8T) = mx dt ox
Qx=f
Reemplazando, tenemos el mismo resultado de la ecuación (2.14)
mx+bx+kx = f
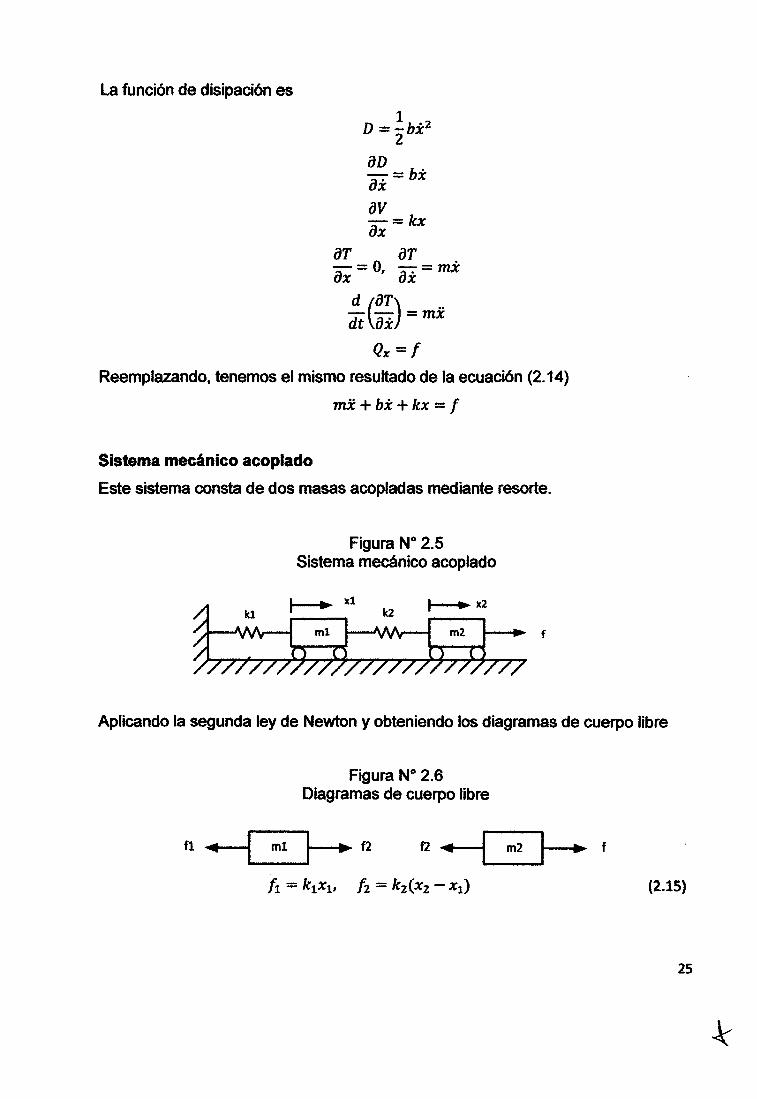
Sistema mecánico acoplado
Este sistema consta de dos masas acopladas mediante resorte.
Figura No 2.5 Sistema mecánico acoplado
Aplicando la segunda ley de Newton y obteniendo los diagramas de cuerpo libre
fl ....... 1---1 ml
Figura N° 2.6 Diagramas de cuerpo libre
1---1~· f2 t2 ...... 1---1 m2
(2.15)
25

Enm1:
Enm2:
f2- A= m1x1
k2Cx2- x1)- k1x1 = m1x1
m1x1 + (k2 + k1)x1 - k2x2 =o
f- f2 = m2x2
f:;: m2x2 + k2(x2- Xt)
m2x2 + k2x2 - k2x1 = f
las ecuaciones (2.16) y (2.17) representan la dinámica del sistema
Aplicando la ecuación de lagrange
las energías cinéticas de m1 y m2 son:
la energía cinética total es
1 . 2 T1 = 2m1x1 ,
1 . 2 1 . 2 T = T1 + T2 = 2m1Xt + lm2x2
D=O las energías potenciales de m1 y m2 son:
1 2 1 2 Vl = zktXv V2 = lk2(X2- Xt)
La energfa potencial total es
(2.16)
(2.17)
(2.18)
(2.19)
26
fJT
fJD ax1 =o, fJT -=0, OXt
-a· =mt:Xv Xt
:t (:~) = m1x1.
éJD -=0 éJxz
éJT -=0 éJx2
fJT -. = mzXz fJx2
!!:_ (a~) = m2xz dt éJx2
Reemplazando en la ecuación de Lagrange obtenemos el mismo modelo matemático
por este método.
m1x1 + (k2 + k1)x1 - k2x2 =O
mzXz + kzXz - kzXt = f
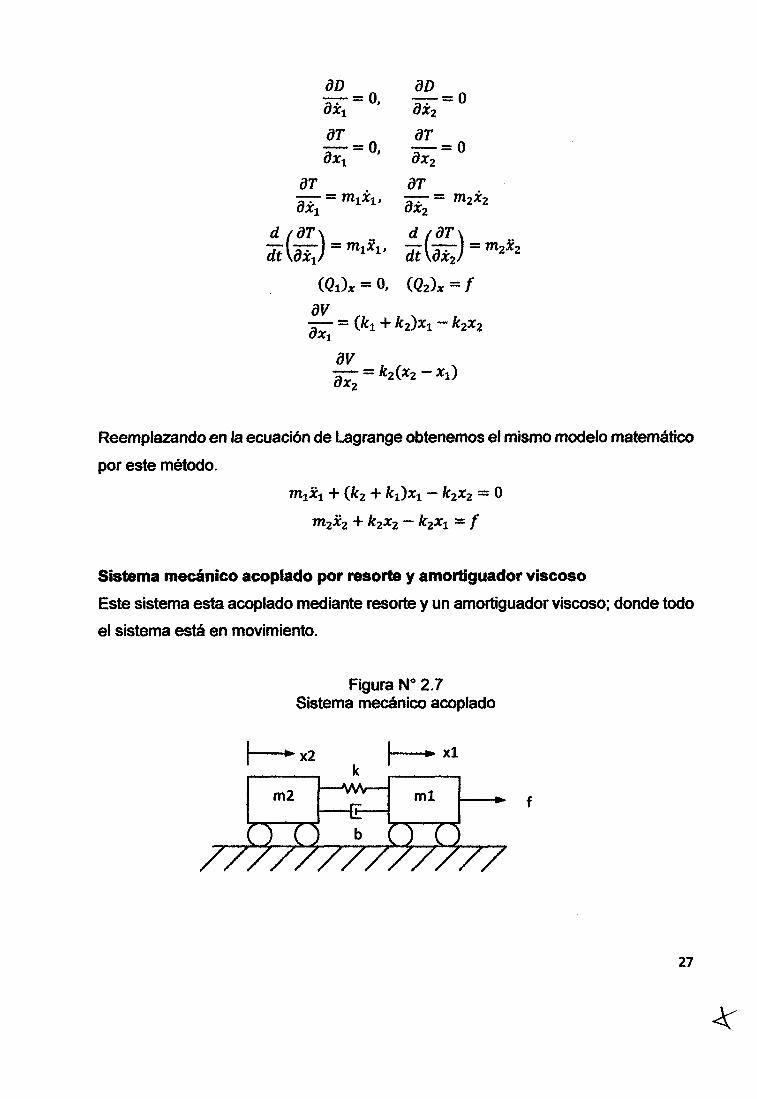
Sistema mecánico acoplado por resorte y amortiguador viscoso
Este sistema esta acoplado mediante resorte y un amortiguador viscoso; donde todo
el sistema está en movimiento.
Figura No 2. 7 Sistema mecánico acoplado
k ~xl
f
27
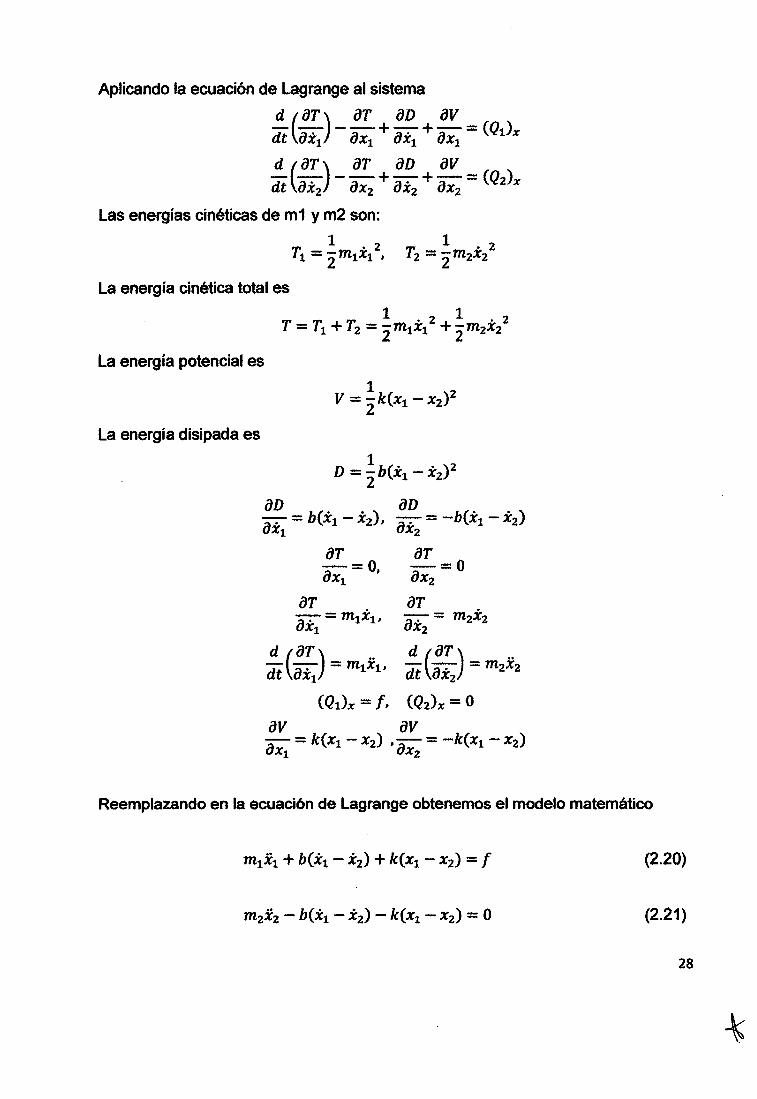
Aplicando la ecuación de Lagrange al sistema
d ( iJT) iJT iJD iJV dt OX¡ - iJx
1 + iJx
1 + iJx
1 = (Q¡)z
d ( iJT) iJT iJD iJV dt iJ:X
2 - iJx
2 + iJ:X
2 + iJx
2 = (Q2)x
Las energfas cinéticas de m1 y m2 son:
1 . 2 f2 = -m2X2
2
La energía cinética total es
La energía potencial es
La energía disipada es
1 2 V= -k(x1 - x2)
2
1 D = -b(x1 - x2) 2
2 iJD iJD
-0
. = b(x1 - :X2), X¡
-. = -b(x1 - x2 ) iJx2
iJT
iJT --o OX¡- 1
-0 . = m1x11 X¡
iJT -=0 iJx2
iJT -. = mzXz iJx2
!!:._ ( iJT ) = m1x1 !!:._ ( iJT. ) = m2x2 dt iJ:X1 1
dt iJx2
{Q¡)z = f, (Qz)x =O
av av -= k(x1 -x2) ,-= -k(X1 -x2) iJx1 iJx2
Reemplazando en la ecuación de Lagrange obtenemos el modelo matemático
(2.20)
(2.21)
28

La máquina de Atwood
La máquina de Atwood está compuesta por dos masas m1 y m2 suspendidas de un
hilo inextensible y sin masa que pasa sobre la polea de radio R que tampoco tiene
masa ni rozamiento. Como la longitud del hilo es fqa, la posición de todo el sistema
puede especificarse por una única variable, que puede ser la distancia x.
y
Figura N° 2.8 Máquina de Atwood
ml
Usando x como la coordenada generalizada, encontramos la ecuación lagrangiana
del movimiento. Debido a que la cuerda tiene una longitud fija, las alturas x e y de
las dos masas no puede variar independientemente. En lugar de ello,
X+ y+1CR = l
La longitud de la cuerda, así que y se puede expresar en términos de x como
y= -x + const
Por lo tanto, podemos usar x como nuestra coordenada generalizada. Vemos que
'Y=-x De forma que la energía cinética del sistema es
1 ·2 1 ·2 1 ·2 T=2m1x +2m2y =2Cmt+m2)x
Mientras que la energía potencial es
V = -m1gx - m2gy = -(m1 - m2)gx + const
29

Ellagrangiano será
La ecuación del movimiento de Lagrange es
iJL d (iJL) ax = dt oi (2.22)
Obtenemos
Entonces la aceleración será
(2.23)
La escoger m1 y m2 bastantes cercanos el uno del otro, podemos hacer que la
aceleración sea mucho menor que g, y por consiguiente mucho más fácil de medir.
Péndulo doble
Un péndulo doble de longitud L 1 y L2 con masas m1 y m2 se muestran en la figura.
A partir de las ecuaciones de Lagrange se derivara las ecuaciones dinámicas del
movimiento.
m2
Figura No 2.9 Péndulo doble
v2
30

La energía cinética del péndulo es dado por
1 2 . 1 2 T = -m1v1 + -m2v2 2 2
Donde las velocidades de las masas m1 y m2 están dadas por
2 ( . )2 v1 = Lt81
La energía cinética del péndulo es dado por
V= m1gL1(1- cos81) + m2g[L1(1- cos81)+L2(1- cos82 )]
La ecuación de Lagrange es
:!_(iJT) _ iJT + iJD + iJV =O dt iJq¡ iJq¡ iJq¡ iJq¡
D=O
d (iJT) iJT iJV dt iJq¡ - iJq¡ + iJq¡ = o
donde
d sen8 ~ 8, cos(82 - 81) ~ 1, dt cos(82 - 81 ) ~ O
(2.24)
(2.25)
(2.26)
(2.27)
31
Sustituyendo
iJT iJV
081 =O,
081 = m1gL1sen81 + m2gL1sen81
La primera ecuación del movimiento, está dada por
(m1 + m2)L181 + m2L282 + (m1 + m2)g81 =O (2.28)
Similarmente
2 - -= m2L282 + m2L1L281
iJT iJV
062 =O,
062 = m2gL2sen82
Y la segunda ecuación del movimiento es
L282 + g82 + 81 L1 = O (2.29)
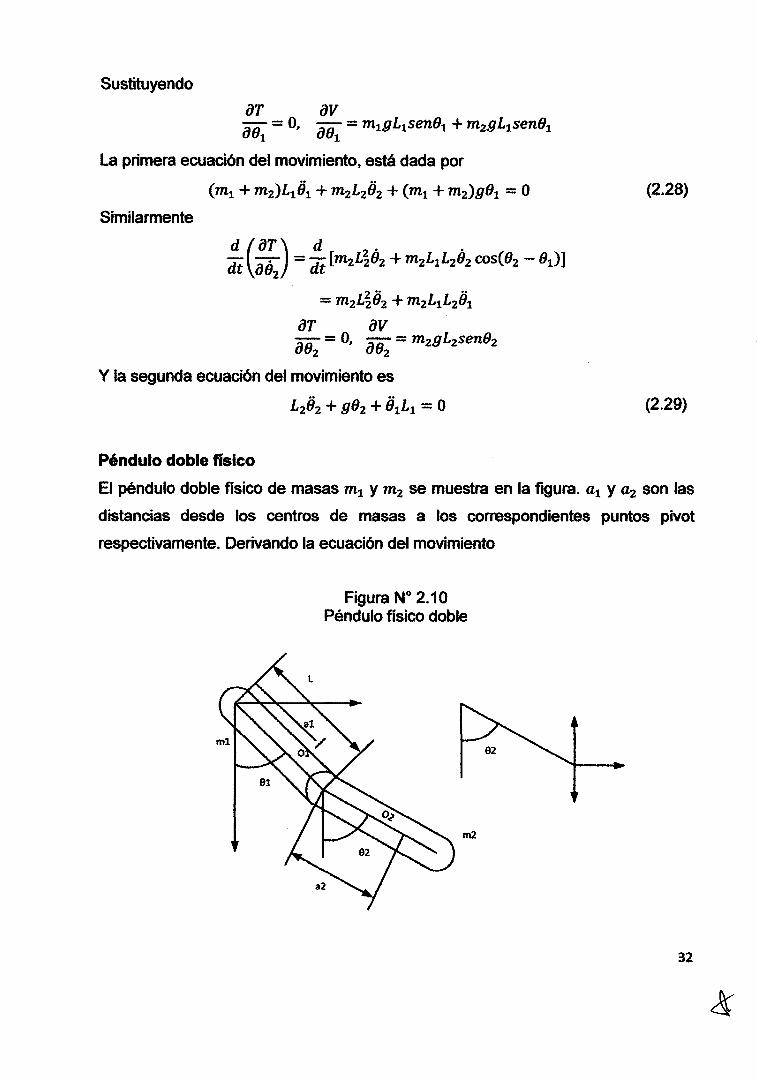
Péndulo doble físico
El péndulo doble fisico de masas m1 y m2 se muestra en la figura. a1 y a2 son las
distancias desde los centros de masas a los correspondientes puntos pivot
respectivamente. Derivando la ecuación del movimiento
Figura No 2.1 O Péndulo fisico doble
m2
32

Sea (x11 y1) y (x2, y2) las coordenadas de los centros de masa 01 y 02 , ] 1 y h los
momentos de inercia de los péndulos con respectos a los ejes de rotación. Tomando
momentos con respecto a los puntos A y B, tenemos
] 2B2 = -m2gu2sen82 - m2x2u2cos82 + (m2u2sen82).y2
Jt01 = -m1gx1 + m1y1x1 - m1f 1y1 + m2y2Lsen81 - m2x2y2 - m2y2x2 - m2gLsen81
Entonces
x1 = u1sen81
x2 = Lsen81 + u2sen82
Yt = U¡COS8¡
y2 = Lsen81 + u2sen82
•• • 2 x1 = u1 cos8181 - u1 sen8181 •• •• • 2 •• • 2 x2 = Lcos8181 - Lsen8181 + u2cos82 82 - u2sen8282
.• .2 y1 = -u1sen8181 - u1cos8181
•• •• • 2 •• • 2 y2 = -Lsen8181 - Lcos8181 - u2sen8282 - u2cos8282
Sustituyendo estos valores en las ecuaciones de momentos, obtenemos
lz02 + m 2 (u2L cos(82 - 81) B1 + u2L sen(82 - 81)Bf + u~B2 + u2gsen82 ] = O
] 1B1 + m1(u~B1 + a1gsen81) + m2 (L2B1 + a2Lcos(82 - 81) B2]
+ m2 (a2Lsen(81 - 82)Bf + gLsen81 ] =O
Asumiendo pequeñas oscilaciones
senO~ 8, cose:::::: 1
Despreciando términos de alto orden, las ecuaciones del movimiento serán
(2.30)
(2.31)
33

2. 2 SISTEMAS MECANICOS ROTACIONALES
Elementos mecánicos lineales rotacionales. El amortiguador viscoso rotacional
es un concepto similar al traslacional y la resistencia al movimiento se presenta como
par de carga. La fuerza resistente varia proporcionalmente a la velocidad angular.
La masa inercial y el resorte torsional almacenan energía cinética y energra potencial
respectivamente. El par que presenta el resorte torsional es proporcional al
desplazamiento angular.
Figura No 2.11 Elementos mecánicos rotacionales
8 Amortiguamiento
Viscoso (N.m.slrad)
J Momento de inercia
(Kg.m2)
K Resorte tonsional
(n.mlrad)
Masa rotacional
S_) J ~ )
w(t)
T(t) €) )~ o)-' . "-"'--~
w(t) T(t)
<~)) ) ------t~ w(t)
Figura N° 2.12 Masa rotacional
T(t)=Bw(t)
T(t)=Jdv(t) dt
T(t)=KB(t)
34

En la figura se muestra un masa J que está rotando sobre un elemento viscoso b
ante un torque rotacional aplicado.
k = constante del resorte de torsion
b = constante de amortiguamiento viscoso
w = velocidad angular
T = torque torsional
] = momento de inercia de la masa
a = aceleracion angular
8 = desplazamiento angular
Tr = torque resultante
Tk = torque del resorte
Tb = torque viscoso
El torque resultante es
Tr=Ja T - Tb - Tk =JO Tk = k8, Tb = biJ
Reemplazando obtenemos el modelo matemático del sistema rotacional
¡o + biJ + k8 = T
Sistema rotacional en un medio viscoso
Figura N° 2.13 Rotor en medio viscoso
Reemplazando obtenemos el modelo matemático del sistema
]ii + biJ = T
(2.32}
(2.33)
35

Sistema rotacional acoplado
Figura No 2.14 Sistema rotacional acoplado
Como hay dos masas que giran con energfa cinética almacenada, la selección de
variables de estado que está directamente relacionado con el almacenamiento de
energfa conduce a x1 = w1 y x 2 = Wz.
Es aparente que debería existir una variable que estuviese relacionada con la
energía potencial almacenada para cada uno de los tres resortes de torsión, pero
dos de los resortes están fijos por un extremo, y el conocimiento de la deflexión
angular de dos es suficiente para detenninar el tercero. El utilizar x3 = 81 y x4 = 82
completa la selección de variables de estado. Sumando los pares sobre las dos
masas con las variables seleccionadas produce las ecuaciones de primer orden.
dw1 T1 = h dt+ b1w1 + k181 + kz(81- 82)
dwz Tz = 1z dt + bzWz + k382 + kz(8z- 81)
d81 d82 dt = w1 ' dt = Wz
El modelo matricial vectorial es
b1 (k1 + kz) kz 1 o o
~~]= 11 11 11
~} 11
bz kz (k3 + kz) 1 [~~] o -- - o 12 lz 12 lz (2.34)
1 o o o o o o 1 o o o o
36
Si la deflexión angular del centro del resorte se denota por Be, entonces
y= Be= x3 -x4
Y la ecuación de salida es
y = [O O 1 -1] ~~] + [O O] ~~~] Sistemas de engranajes
(2.35)
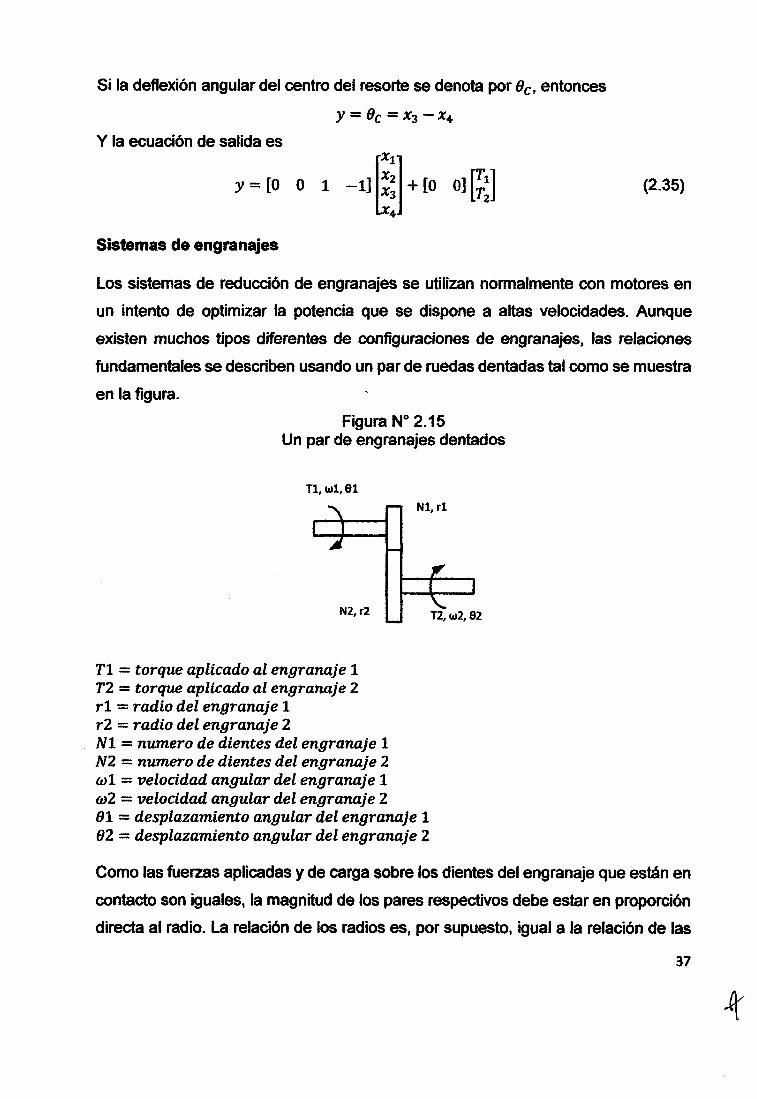
Los sistemas de reducción de engranajes se utilizan normalmente con motores en
un intento de optimizar la potencia que se dispone a altas velocidades. Aunque
existen muchos tipos diferentes de configuraciones de engranajes, las relaciones
fundamentales se describen usando un par de ruedas dentadas tal como se muestra
en la figura.
Figura No 2.15 Un par de engranajes dentados
Tl,w1,91
T1 = torque aplicado al engranaje 1 T2 = torque aplicado al engranaje 2 r1 = radio del engranaje 1 r2 = radio del engranaje 2 N1 = numero de dientes del engranaje 1 N2 = numero de dientes del engranaje 2 w1 = velocidad angular del engranaje 1 w2 = velocidad angular del engranaje 2 B1 = desplazamiento angular del engranaje 1 B2 = desplazamiento angular del engranaje 2
Como las fuerzas aplicadas y de carga sobre los dientes del engranaje que están en
contacto son iguales, la magnitud de los pares respectivos debe estar en proporción
directa al radio. La relación de los radios es, por supuesto, igual a la relación de las
37
circunferencias. Por lo tanto, la relación del par aplicado al par transmitido es igual a
la relación del número de dientes del engranaje tales que
Tt Nt T2 = N2
Con la rotación de los engranajes, las distancia recorridas a lo largo de las
circunferencias deben ser iguales y esta igualdad se pueda plantear en términos del
producto del cambio en ángulo y el radio tal que
81R1 = 82R2
Derivando con respecto al tiempo se obtiene
Finalmente
(2.36)
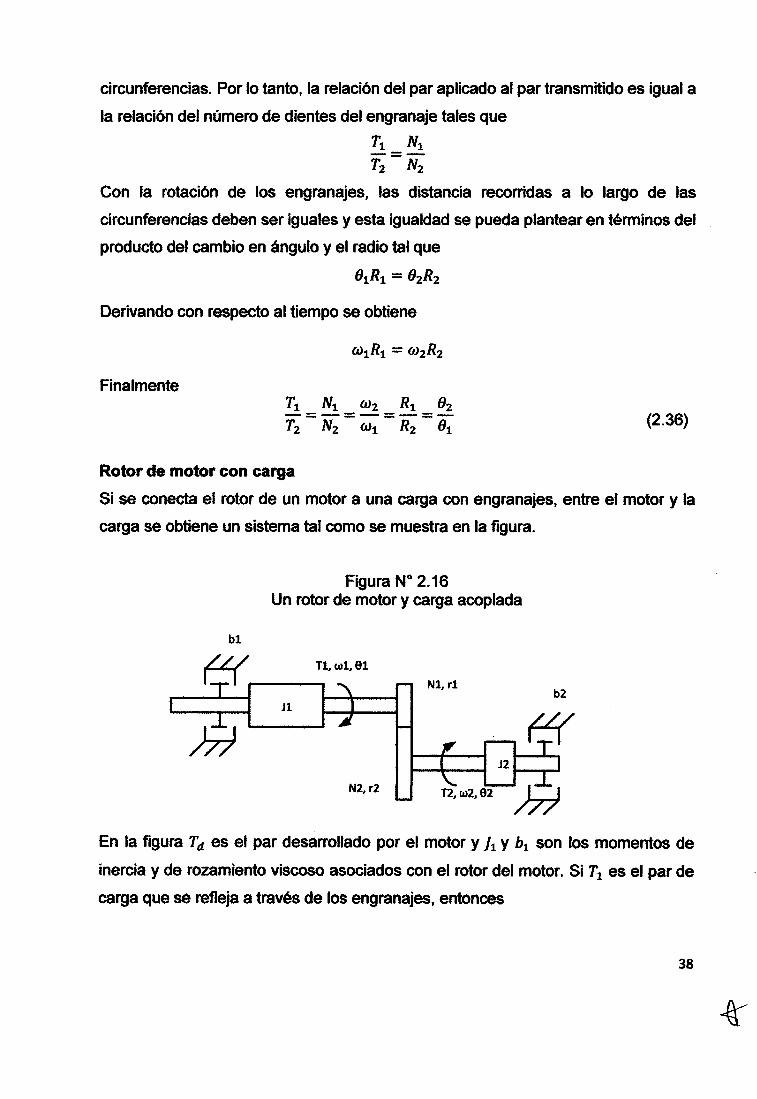
Rotor de motor con carga
Si se conecta el rotor de un motor a una carga con engranajes, entre el motor y la
carga se obtiene un sistema tal como se muestra en la figura.
Figura No 2.16 Un rotor de motor y carga acoplada
bl
Tl, wl, 91
J1
En la figura Ta es el par desarrollado por el motor y ft y b1 son los momentos de
inercia y de rozamiento viscoso asociados con el rotor del motor. Si T1 es el par de
carga que se refleja a través de los engranajes, entonces
38
y el par de carga es
dw2 r2 = h-;¡;- + b2w2
Combinando ecuaciones, tenemos
dw1 N1 { dw2 ) Td = lt-;¡;- + bt Wt + N
2 h-;¡;- + b2w2
Los términos que se expresan en función de la velocidad de salida se pueden reflejar
al lado fuente de los engranajes. Obsérvese que la velocidad angular se relaciona
inversamente con la relación de los dientes y las derivadas de la velocidad angular
deben presentar la misma relación. Con todos os términos de la ecuación,
expresados en función de la velocidad de entrada
(2.37)
Donde
Nt 2
leq = lt + (NJ h • (2.38)
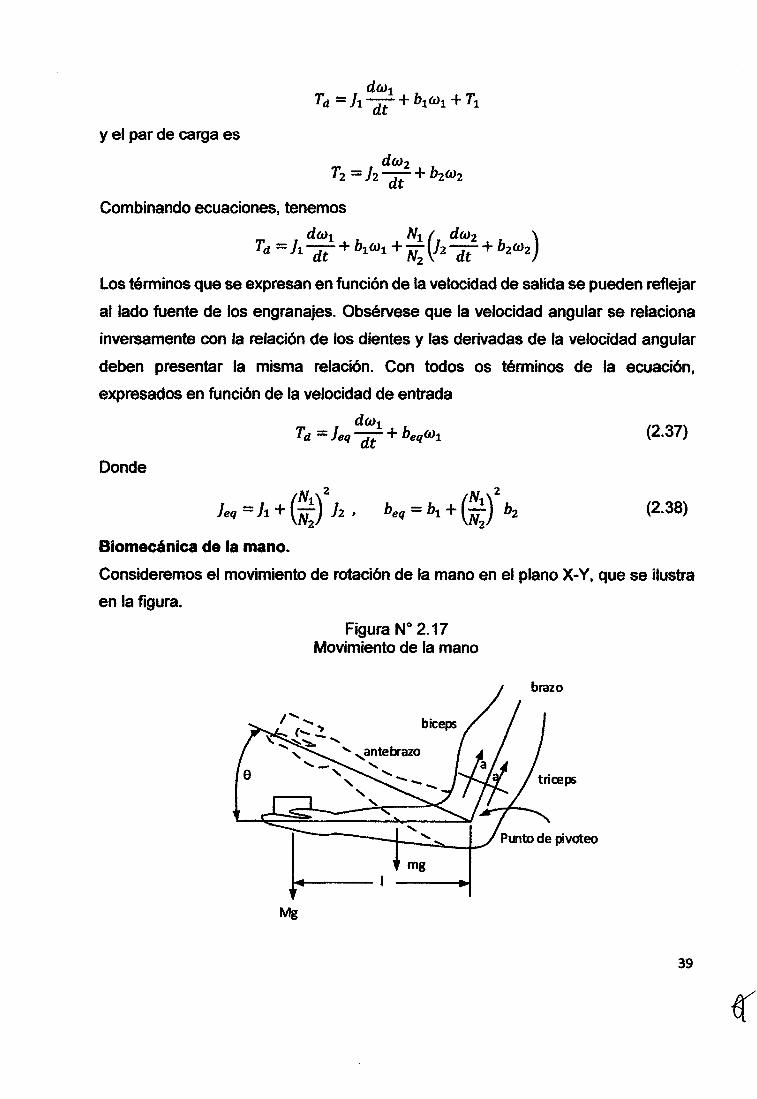
Biomecánica de la mano.
Consideremos el movimiento de rotación de la mano en el plano X-Y, que se ilustra
en la figura.
e
Figura No 2.17 Movimiento de la mano
,--- mg
¡.-----~--~ .... Mg
brazo
39
El ángulo 9 describe este movimiento. La mano sostiene un objeto de masa M, y el
antebrazo tiene una masa m y longitud l. Si utilizamos modelos simplificados para
las fuerzas que generan los músculos, entonces el bíceps proporciona una fuerza de
magnitud Fb = -kb9, donde kb es una constante, y el tríceps proporciona una fuerza
de magnitud Ft = -ktv, donde kt es una constante y ves la magnitud de la velocidad
con la cual el tríceps es estirado.
Además, se supone que el antebrazo se puede tratar como una viga rígida. Se
obtiene la ecuación rectora no lineal del movimiento. Este sistema se linealiza para
oscilaciones pequenas con respecto a la posición de equilibrio del sistema.
La ecuación del movimiento del sistema se deduce del equilibrio de momentos con
respecto al centro del antebrazo o el punto de pivoteo (codo) si este punto es fijo. Si
se supone que el pivote es un punto fijo, la ecuación se aplica para efectuar un
balance de momentos con respecto al punto O. entonces la ecuación toma la forma
M =J0 0k
donde k es el vector unitario, ] 0 es la inercia rotatoria del antebrazo y el objeto que
sostiene la mano. El momento neto M, que actúa con respecto del punto O debido a
la carga de gravedad y a las fuerzas debido al bíceps y al tríceps, se expresa por
medio de
Donde
l M= -Mglcos9- mg2cos9 + Fba- Fta
l .. -MglcosB- mg2cos8 + Fba- Fta- ]0 8 =O
Fb = -kbB
Ft = ktv = ktaiJ
1 lo = -ml2 + Ml2
2
{M+;) l20 + kta2 iJ + kba9 + (M + ;) glcos8 = O (2.39)
En esta ecuación, el término de la inercia se debe a la rotación del antebrazo y de la
masa final y el término de amortiguamiento se debe al tríceps. Además, el término
de rigidez se debe al bíceps, y hay otro término a causa de la gravedad que hace a
40
la ecuación no lineal debido a la presencia del término cose. Este último término
influye en la posición de equilibrio estático y la rigidez del sistema, y esta influencia
depende de la magnitud de 8.
Para la posición de equilibrio estático, obsérvese que los términos del momento
externo dependientes del tiempo están ausentes en la ecuación y deben igualar el
término de la velocidad y el de la aceleración a cero para encontrar la posición de
equilibrio fJ = 80 es una solución de la ecuación transcendental
kba80 + (M + ;) glcosfJ0 = O
Para el sistema lineal que rige las oscilaciones pequeñas con respecto a la
posición de equilibrio estático, si se consideran ahora las oscilaciones con
respecto a la posición de equilibrio estático y se expande la variación angular en la
forma
8 = 80 + fJ entonces de linealiza el término no lineal cos8 . Para hacerlo, efectuamos las
expansiones de la serie de Taylor de este término y conservamos solo los términos
lineales en fJ. Esto origina
cos8 = cos( 80 + fi) ~ cos 80 - fisen80 + ··· Al evaluar las derivadas de 8 con respecto al tiempo, se encuentra que
.. d2 ~ ;: 8 = dt2 ( 80 + 8) = 8
d(. ~);.. 8 = dt 80 +8 = 8
Luego de sustituir en las ecuaciones correspondientes se llega a la siguiente
ecuación lineal del movimiento que rige las oscilaciones pequeñas del antebrazo con
respecto a la posición de equilibrio
(M+;) l2D + kta20 + [kba8- (M+ ;)glsen80 ] fJ =O (2.40)
Se debe notar que la carga por gravedad influye en la rigidez lineal del sistema
linealizado.
41
2.3 SISTEMAS MECANICOS TRASLACIONAL-ROTACIONAL
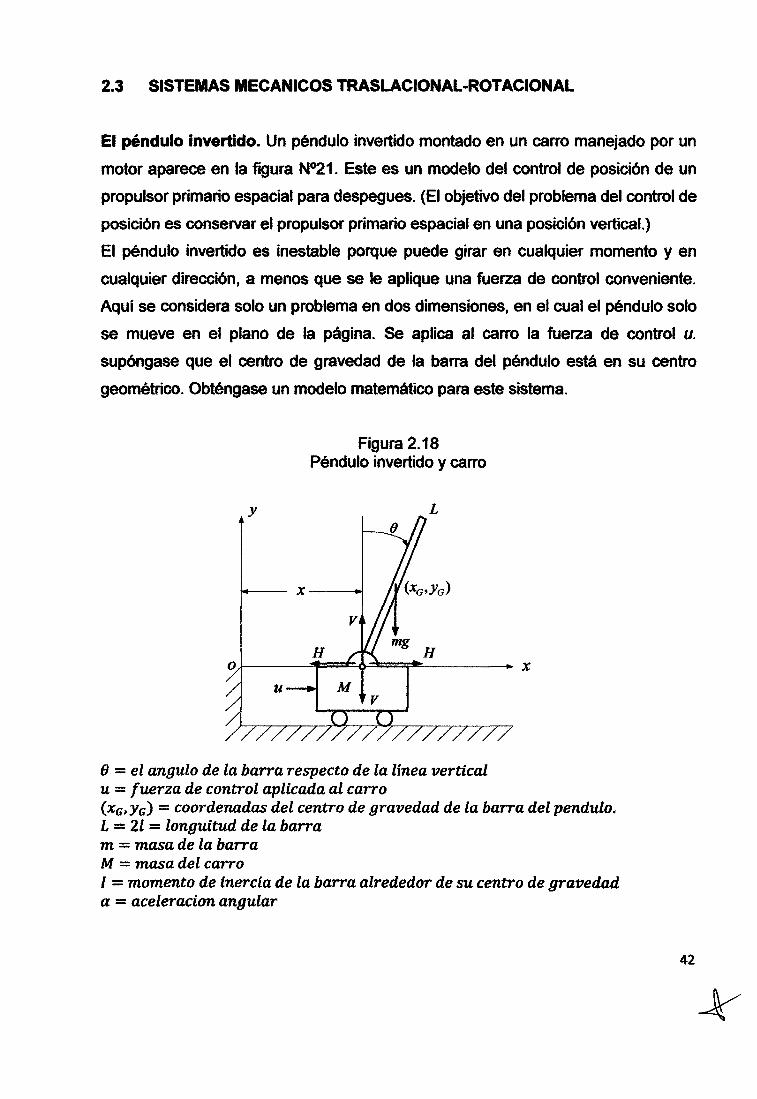
El péndulo invertido. Un péndulo invertido montado en un carro manejado por un
motor aparece en la figura N«»21. Este es un modelo del control de posición de un
propulsor primario espacial para despegues. (El objetivo del problema del control de
posición es conservar el propulsor primario espacial en una posición vertical.)
El péndulo invertido es inestable porque puede girar en cualquier momento y en
cualquier dirección, a menos que se le aplique una fuerza de control conveniente.
Aqui se considera solo un problema en dos dimensiones, en el cual el péndulo solo
se mueve en el plano de la página. Se aplica al carro la fuerza de control u.
supóngase que el centro de gravedad de la barra del péndulo está en su centro
geométrico. Obténgase un modelo matemático para este sistema.
y
Figura 2.18 Péndulo invertido y carro
L
~+--- x--+t
H
8 =el angulo de la barra respecto de la línea vertical u = fuerza de control aplicada al carro (xa.Ya) =coordenadas del centro de gravedad de la barra del pendulo. L = 2l = longuitud de la barra m = masa de la barra M = masa del carro 1 = momento de inercia de la barra alrededor de su centro de gravedad a = aceleracion angular
42
Las coordenadas del centro de gravedad son
Xcc = x + lsen8, Ycc = lcos8
El movimiento rotacional de la barra alrededor de su centro de gravedad. En este
caso la suma de momentos alrededor del centro de gravedad de la barra (de sentido
positivo en la dirección de las agujas del reloj.
LMcc =leca
a=8
¡jj = V(lsen9) - H(lcos9) (2.41)
El movimiento horizontal del centro de gravedad de la barra del péndulo se obtiene
mediante.
LFx=max
ax =!ice
H =micc (2.42)
El movimiento vertical del centro de gravedad de la barra del péndulo se obtiene
mediante.
LFx=max
ay= Ycc
V-mg =:Ycc
El movimiento horizontal del carro se describe mediante:
l:Fx = max
u-H =Mi
(2.43)
(2.44)
Como se debe mantener el péndulo invertido en posición vertical, entonces el ángulo
de rotación es muy pequeño (Linealización).
sen8:;:: 8, cosO:;:: 1
43

luego las ecuaciones linealizadas, son:
Xcc = x + l8, YcG = l 10 = Vl8- Hl
Xcc = x +lO
Ycc =O
H = m(x + lii) V-mg =O
u-H=Mx
u= Mx +H = Mx+m(x+ lO)
Se obtienen las ecuaciones que describen el movimiento compuesto del sistema
péndulo invertido. Estas ecuaciones constituyen el modelo matemático lineal
(M+ m)x + mlO =·u
(1 + ml2)8 + mlx = mgl8
x1 = 8 Xz = iJ x3 =x x4=x
X1 = iJ = Xz
Xz = jj x3 = x = x4
x4 =x
. (M + m)mgl ml X= X- U 2 (M+m)l+mMl2 1 (M+m)l+mMl2
. 1 + ml2 m2 l 2g x4 = (M+m)l+mMllu- (M+m)l+mMl2x1
(2.45)
(2.46)
44

La ecuación de estado y salida tienen la forma
x =Ax+Bu
y= Cx+Du
o 1 o o o
~~= (M+m)mgl
ElJ ml o o o -
(M+ m)/+ mMl2 x2 + (M+ m)/+ mML2 u (2.47) o 3 o
m2l2g o o 1 4 1 +ml2
(M + m)I + mML2 o o /;0
(M + m)I + mMl2
g~] = [~ ~ ~ ~1 E~l (2.48)
El momento de inercia de la barra alrededor de su centro de gravedad es 1 = i ml2
Grúa puente con carga colgante. Es un sistema mecánico que consta de
movimientos traslacional y rotacional.
Figura No 2.19 Grúa puente con carga colgante
1 .. X
u
Los diagramas de cuerpo libre se muestran en las figuras siguientes.
45

Figura No 2.20 Diagrama de cuerpo libre carro-grúa
Figura No 2.21 Diagrama de cuerpo libre del péndulo
p
mg e
Ya que el carro de la figura está obligado a moverse por el carril solamente en la
dirección x, tiene sentido ignorar otros movimientos. Esto se ha supuesto en su
diagrama de cuerpo libre
F=Ma
u-N-bx=Mx
Las tuerzas de reacción desconocidas N y P pueden eliminarse en las ecuaciones
del movimiento.
Aplicando la segunda ley de Newton al péndulo en la dirección x, da
N= mi+ (mlcos8)B- mliJ2sen8
46
Perpendicular al péndulo da
PsenO +N senO- mgsenO = mlB + TT1Xcos8
Aplicando suma de momentos alrededor del centro de masa
-PlsenO- NlcosO = 18
Donde 1 es el momento de inercia alrededor del centro de masa del péndulo. las
fuerzas de reacción se eliminan fácilmente combinando ambas ecuaciones
(1 + ml2)0 + mglseno··= -mlxcosO (2.49)
Se requiere una ecuación que describa el movimiento del carro, para completar el
conjunto.
(M+ m)x + bx + mlBcosO - mli:J2sen0 = u (2.50)
Las ecuaciones (2.49) y (2.50) representan la dinámica no lineal de la grúa-puente.
Para movimientos pequenos alrededor de la vertical, cos8 ~ 1, senO ~ O, li2 -o Por lo tanto la ecuación se simplifica y obtenemos las ecuaciones dinámicas
linealizadas de la grúa puente
(I + ml2)8 + mglO = -mlx (2.51)
(M + m)x + bx + ml8 = u (2.52)
Además podríamos asumir que el péndulo tiene un pequeño movimiento con
respecto a una dirección vertical hacia arriba, como es el caso para el péndulo
invertido que se muestra en la figura, en cuyo caso cosO ~ -1, senO ~ -o, entonces
(1 + ml2)8 - mglO = mlx (2.53)
(M + m)x + bx - ml8 = u (2.54)
47

Sistema masa-resorte-péndulo en movimiento libre
El sistema de la figura consiste en un carro que se desplaza en forma traslacional y
lleva un péndulo con movimiento rotacional.
Figura No 2.22 Sistema masa-resorte-péndulo
Usando la ecuación de lagrange se deduce las ecuaciones del movimiento del
sistema. Tomando a x y 8 como coordenadas generalizadas para el sistema
tenemos, para la posición de la particula m:
x1 = x + lsen8, y1 = lcos8
la forma general de la ecuación de lagrange considerando es lagrangiano es
i = 1,2, ... , n (2.55)
L=T-V (2.56)
Para este caso de dos grados de libertad
d (iJL) iJL dt iJx - iJx = (Qx)n (2.57)
(2.58)
48
Como el sistema es conservativo, entonces
d (iJL) iJL di iJqi - iJqi = o
En este caso
~(iJL) _ iJL =O ~(iJ~) _ iJL =O dt iJx iJx ' dt iJO iJO
Sea v la velocidad de la partrcula. Entonces
v2 = (x + lBcos0)2
+ (lilsen0)2
= .±2 + l2 i12 + 2lxiJcosO
La energfa cinética es y potencial
1 1 T = -Mx2 +-mv2
2 2
T = ~Mx2 + ~m(x2 + fl(}2 + 2lxécos0) 2 2
T =~(M+ m)x2 + ~m(l2iJ2 + 2l:técos0), 1
V= 2kx2 + mgl(1- cosO)
El Lagrangiano es
L = T- V= ~(M+ m)x2 + ~m(l2iJ 2 + 2lxécos0)- ~kx2 -mgl(1- cosO) 2 2 2
Para la coordenada x, tenemos
iJL . iJL iJx =(M+ m)x + mlOcosO, iJx = -kx
d (iJL) e·· .2 ) dt iJx = (M+ m)i + ml O cosO - O senO
Y la ecuación de movimiento, es
(M+ m)i + ml(BcosO- iJ 2sen0) + kx =O
Para la coordenada o tenemos
iJL . iJIJ = ml(l6 + xcosO)
d (iJL) ( .. . ) dt iJ{J = ml lO+ icosO- :tOsenO
iJL ( . ) iJO = -ml xO + g senO
Y la ecuación del movimiento es
lB + icosO + gsenO = O (2.59)
49

Péndulo amortiguador
Considere el sistema de dos grados de libertad que se muestra en la figura, en que
se utiliza la coordenada generalizada x para ubicar la masa m1 y la otra coordenada
generalizada 8 se utiliza para especificar la posición angular del péndulo.
Figura N° 2.23 Péndulo amortiguador
__.X
ml f
Este tipo de sistema puede modelar un péndulo amortiguador, el cual tiene muchas
aplicaciones. Se supone que la masa de la varilla de longitud L es insignificante.
En este ejemplo se obtienen las ecuaciones rectoras no lineales del movimiento y
después se linealizan con respecto a una posición de equilibrio del sistema.
La posición de la masa m2 es
Tm = (x + Lsen8)i- Lcos8}
En consecuencia, la velocidad de la masa m2 es
drm ( . ) . V m = dt = x + L8cos8 i + L8sen8}
La energía cinética del sistema es
50

La energfa potencial del sistema es
1 V = 2 kx2 + m2nL(1 - cosO)
donde se elige la referencia en la posición inferior del péndulo, o sea, cuando cuelga
verticalmente. Usando las ecuaciones de Lagrange
dd (oiJ~)- iJiJT + iJiJ~ + iJiJV = Qi j = 1,2, .... ,N t qj qj qj qj
Entonces
d (iJT) iJT iJD iJV dt iJx - iJx + iJx + iJx = Q1
d (iJT) éJT éJD iJV dt oiJ - éJB + ao + éJB = Q2
Qt = f, Qz = O, D = O
Luego se reduce a
Luego de sustituir en las ecuaciones de Lagrange, se obtiene
(2.60)
(2.61)
51
Posiciones de equilibrio estático. Si hacemos que las aceleraciones, velocidades
y fuerza dependiente del tiempo f sean iguales a cero en las ecuaciones, las
ecuaciones que rigen las posiciones de equilibrio x0 y 80 del sistema son
kx0 =O
m2gLsen80 = O
Según estas ecuaciones, las posiciones de equilibrio del sistema que se obtienen
son (X0 , 80 ) = (0,0)
(Xo, 80 ) = (0,7C)
Donde la primera de las ecuaciones corresponde a la posición inferior del péndulo y
la segunda corresponde al péndulo cuando ha girado 180°.
Linealización. Si consideramos oscilaciones pequeñas con respecto a la posición
de equilibrio (0,0) y se linealizan las ecuaciones del movimiento dadas por las
ecuaciones dinámicas del modelo matemático, en forma similar a lo que se mostró
al emplear las ecuaciones, se obtiene
(m1 + m2)x + m2LB + kx = f (2.62)
(2.63)
Lo cual en forma matricial se expresa como
(2.64)
En esta ecuación, la carga de gravedad aparece de manera explícita en las
ecuaciones que gobiernan las oscilaciones pequeñas con respecto a la posición de
equilibrio estático. En este caso, las ecuaciones rectoras están acopladas debido a
los términos diferentes de cero que se encuentran fuera de la diagonal en la matriz
de inercia.
52

Péndulo de movimiento libre
Usando la ecuación de Lagrange en la forma general
Figura No 2.24 Péndulo simple
1
1 1
1
1 1 1
169sene
1 -r-'
mg
La energía cinética es
1 2 1 2"2 • T = -mv = -ml 8 con v = l8 2 2
La energia potencial
V= -mglcos8
El Lagrangiano
La ecuación de Lagrange es
!!.. (al:) _ aL = 0 dt o8 o8
oL 2 • d (oL) 2 •• --:- = ml 8, - --:- = ml 8 o8 dt o8 •
aL -= -mglsen8 o8
ml20 + mglsen8 = O .. g 8 +-sen8 =O
l
Linealizando sen8 ~ 8, entonces se obtiene
8+ 9 8=0 l
(2.65)
(2.66)
53

CAPITULO 111
SISTEMAS ELECTRICOS Y ELECTRONICOS
Las leyes fundamentales que gobiernan los circuitos eléctricos son las de corrientes
y voltajes de Kirchhoff. Un modelo matemático de un circuito eléctrico se obtiene
aplicando una o ambas leyes de Kirchhoff. La ley de corrientes de Kirchhoff (ley de
nodos) plantea que la suma algebraica de todas las corrientes que entran y salen de
un nodo es cero. La ley de voltajes de Kirchhoff (ley de mallas) plantea que en
cualquier instante determinado la suma de los voltajes alrededor de cualquier malla
en un circuito eléctrico es cero.
3.1 SISTEMAS ELECTRICOS
Elementos eléctricos lineales. Los elementos son resistencia, autoinducción y
condensador, con la hipótesis que R, L y C son constantes. Los elementos se
describen como pasivos porque pueden disipar o almacenar energia, pero no pueden
introducirla al sistema. La resistencia disipa energía y la autoinducción y el
condensador almacenan energfa en un campo eléctrico o magnético
respectivamente.
Resistencia (ohmios)
lnductancia (henrios)
Capacitancia (faradios)
Figura No 3.1 Elementos eléctricos
i(t)---.
~(Q R
i(t)---.
~(QL i(t)---.
v(t)=Ri(t)
v(t) = L di(t) dt
i(t)=Cdt(t) dt
54
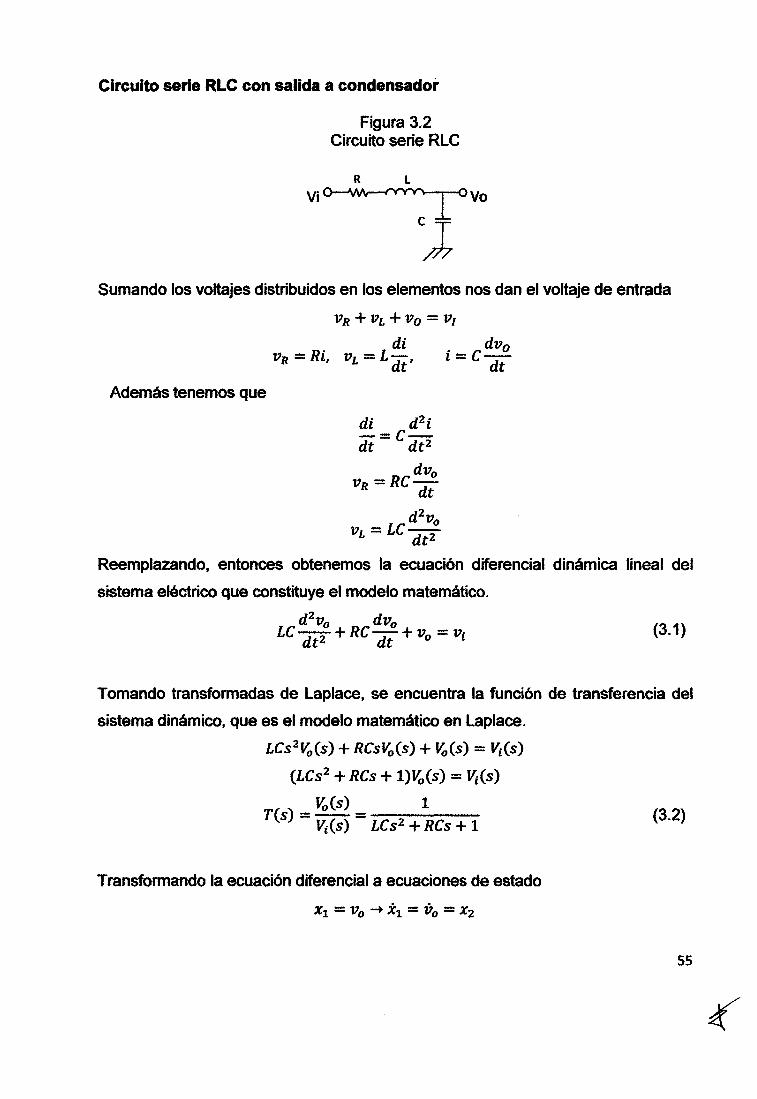
Circuito serie RLC con salida a condensador
Figura 3.2 Circuito serie RLC
Sumando los voltajes distribuidos en los elementos nos dan el voltaje de entrada
17R + VL + 170 = 17¡
Además tenemos que
di dv0 vR = Ri, vL = L dt. i = e dt
di d2 i dt =e dt2
dv0
17R =Re dt
d2vo 17L =Le dt2
Reemplazando, entonces obtenemos la ecuación diferencial dinámica lineal del
sistema eléctrico que constituye el modelo matemático.
(3.1)
Tomando transformadas de laplace, se encuentra la función de transferencia del
sistema dinámico, que es el modelo matemático en Laplace.
LCs2Yo(s) + Resv;,(s) + Vo(s) = "t(s)
(Les2 +Res+ 1)Yo(s) = Vi(s)
Y;,(s) 1 T(s)----~--
- Vi(s) - Les2 +Res+ 1
Transformando la ecuación diferencial a ecuaciones de estado
(3.2)
55

x2 = V0 -+ x2 = V0
LCv0 + RCv0 + 170 = Vt
LCx2 + RCx2 + x1 = u, con u = Vt
1 R 1 Xz = - LC x1 - L Xz + LC u
Ordenando para la fonna matricial
x1 = Ox1 + Xz + Ou
1 R 1 Xz = - LC x1 - L Xz + LC u
Luego el modelo matemático en fonna matricial es
[.] [o 1]x [o] X1 - 1 R 1 + 1 u x2 - -- -- [xz) -LC L LC
, y= [1 O][~~]
Circuito eléctrico en cascada
(3.3)
Muchos sistemas realimentados tienen componentes que se cargan uno al otro,
configurando asf varias etapas del paso de la senal. En la figura siguiente tenemos
un circuito eléctrico de dos etapas RC constituyendo así un filtro pasa bajo de dos
etapas o de segundo orden.
Rl
Figura No 3.3 Circuito RC de dos etapas
Vx R2
o--~~ I ~---r~---o + ~ til 121 +
Vi Vo
o--------~--J[~-------c-2_][~---o Introduciendo un voltaje de nodo desconocido vx que luego tendrá que eliminarse ya
la ecuación diferencial solo debe estar representada por la senal de entrada y la
senat de salida juntos con sus parámetros R y C.
56
Por la ley de corrientes de Kirchhoff: i = í1 + i2
. dvx . dv0
11 = C1 dt , lz = Cz dt
Vt - Vx dvx dv0 ---=C1-+C2 - parai R1 dt dt
Derivando la última ecuación
De la ecuación para i
Reemplazando
Vt dV0 1 { dv0 ) (dv0 d2v0 ) --C2-=- v +R2C2 - +C1 -+R2C2 -
R1 dt R1 o dt dt dt2
Vi dv0 1 { dv0 ) (dv0 d2V0 )
Rt = Cz dt + Rt Vo + RzCz dt + Ct dt + RzCz dt2
Entonces la ecuación diferencial del modelo matemático es
d 2v0 dv0 R1C1 R2 Cz dt2 + (R1 C1 + RzCz + RtCz) dt + 170 = Vt (3.4)
El modelo matemático en transformadas de Laplace, es decir la función de
transferencia es
Vo(s) 1
V¡(s) = R1C1R2C2s 2 + (R1C1 + R2C2 + R1C2)s + 1 (3.5)
El modelo matemático en ecuaciones de estado se obtiene haciendo
(3.6)
57

x1 = Vo -+ .xl = Vo = Xz
. . .. 1 (R1C1 + R2Cz + RtCz) 1 x2 = Vo-+ x2 = Vo =-R1C1R2C2 Xt- . R1ClR2C2 ... x2 + R1C1R2C2 u
u=vi
En fonna matricial
x = [ 01 _ (R1C1 + i2C2 + R1C2)jx + f ~ ]u (3.7)
R1C1R2C2 R1C1R2C2 Ul1C1R2C2
y = [1 O]x (3.8)
3.2 SISTEMAS ELECTRONICOS
Estos sistemas además de llevar resistencias, condensadores y bobinas, también
incluyen elementos lineales como el amplificador operacional que proporciona la
ganancia y alta impedancia a la entrada de señal.
Circuito amplificador con operacional
Además de los parámetros RLC, estos sistemas electrónicos incluyen al amplificador
operacional como elemento activo que introduce una ganancia, baja impedancia de
salida y alta impedancia de entrada.
Figura 3.4 Circuito amplificador con operacional
Por la ley de corrientes de Kirchhoff: i = i1 + i 2
De las propiedades del opamp: v+ = v- = v0
58
. d(v¡- Vx) . d(vx- V0 )
t = el dt , t2 = c2 dt
d(v¡- Vx) Vx- V0 d(vx- V0 )
C¡ dt = R1
+ C2 dt
d(vx- 170 ) V0 c2 =-
dt R2
Despejando esta última, se obtiene
dvx dv0 V0 -=-+-dt dt R2C2
Tomando la segunda derivada
d2vx d 2v0 1 dv0 --=--+---dt2 dt2 R2C2 dt
Ordenando y tomando la segunda derivada
dv¡ V0 dv0 Vx dvx C¡-+-+C2-=-+{C¡ +C2)-
dt R1 dt R1 dt
d2v¡ 1 dv0 d2v0 1 dvx d2vx C¡ dt2 + R
1 dt +C2 dt2 = R
1 dt+ (C1 + C2) dt2
Reemplazando las ecuaciones deducidas
d 2v¡ 1 dv0 d2v0 1 dv0 V0 d2v0 1 dv0
C1 dt2 + R1
dt +C2 dt2 = R1
dt + R1R
2C
2 + (C1 + C2) dt2 + R
2C
2 dt
Obtenemos la ecuación diferencial del modelo matemático que relaciona la salida
con la entrada
(3.9)
El modelo en transformadas de laplace será
T(s) = l'o(s) = . R1R2C1C2s2
\lf(s) R1R2C1C2s2 + R1(C1 + C2)s + 1 (3.10)
El modelo en ecuaciones de estado será
59

De la forma
En forma matricial
b0 = 1, b1 = O, b2 = O
R1CC1 + Cz) 1 a1 = • a2 =
R1R2 C1C2 R1R2C1C2
Po= bo = 1
R1(C1 + Cz) Pt = b1- a1Po =- RlRzCtCz
Circuito electrónico tipo T
(3.11)
(3.12)
Este circuito electrónico incluye un filtro T y además un amplificador operacional
como aislador o seguidor de voltaje.
e Vi
Figura No 3.5 Filtro T
V o
60
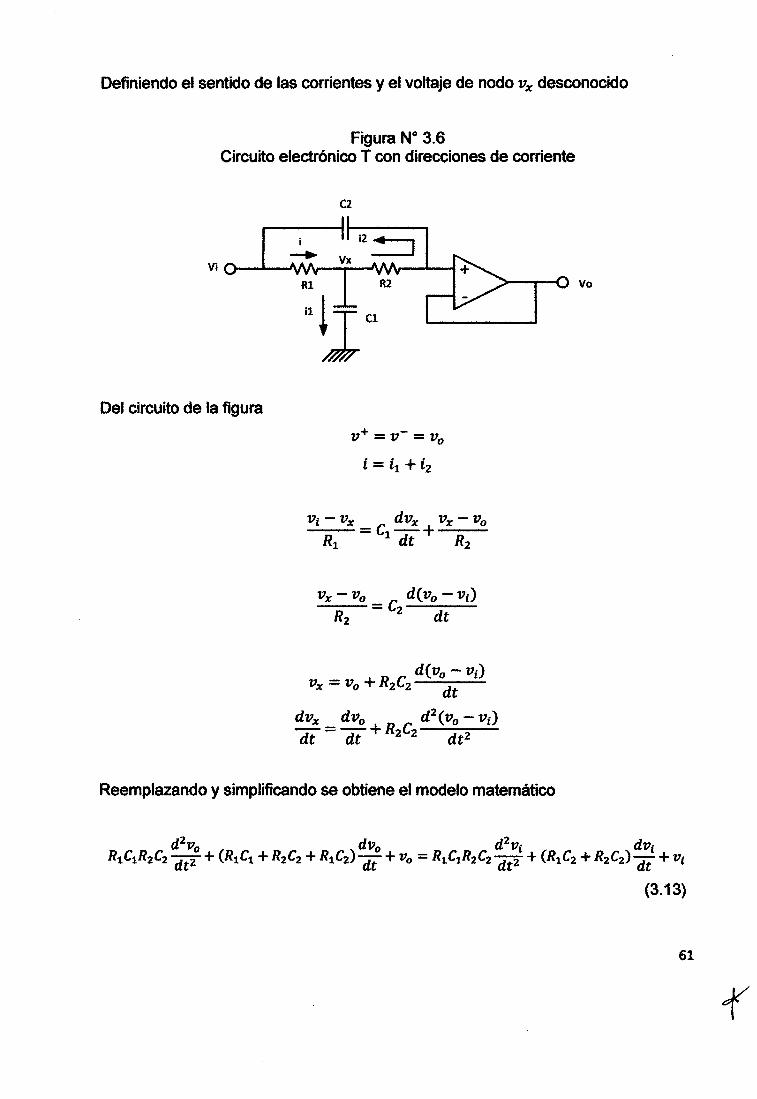
Definiendo el sentido de las corrientes y el voltaje de nodo vx desconocido
Figura No 3.6 Circuito electrónico T con direcciones de corriente
Del circuito de la figura
C2
v+ = v- = V0
i = i1 + i2
d(v0 - Vt) Vx = Vo + RzCz dt
dvx dv0 d2(V0 - Vt) dt = dt + RzCz dt2
Reemplazando y simplificando se obtiene el modelo matemático
V o
d2v0 dv0 d2vt dvi R1C1R2C2 dtZ + CR1C1 + RzC2 + RtCz) dt + Vo = R1C1R2C2 dtZ + CR1C2 + R2 Cz) dt + Vt
(3.13)
61

CAPITULO IV
SISTEMAS DE FLUIDOS Y SISTEMAS TÉRMICOS
4.1 SISTEMAS DE NIVEL DE LIQUIDO
Sistema de nivel de líquido de un tanque
Es importante entender las matemáticas de cómo se comportan los sistemas de
depósitos acoplados. Este es un modelo de sistemas y es una parte importante de
análisis de sistemas de control. Para empezar, observe un sistema de depósito
simple tal como se muestra en la figura siguiente
Figura No 4.1 Sistema de nivel
Oi
/1' 1
H
El modelo del sistema está determinado para relacionar el flujo Qi dentro del tanque
con el flujo Qo, dejando la válvula al botón del tanque. Usando una ecuación de
equilibrio de flujo dentro del tanque es posible escribir:
dH Qi- Qo =A dt (4.1)
Donde A es el área transversal del tanque y H es la altura del fluido. Si la válvula es
diseñada para comportarse como un orificio, entonces el fluido que pasa por la
válvula será relacionado con el nivel de fluido en el tanque, por la expresión:
Q0 = Cda.J2gH (4.2)
En la ecuación (4.2) a es el área transversal del orificio, Cd es llamado el coeficiente
de descarga de la válvula. Este coeficiente toma en cuenta todas las características
62

del fluido, pérdida e irregularidades en el sistema como ambos lados de la ecuación
de balance. La ecuación (4.2) toma a Cd como una constante, por lo que Qo tiene
una relación no lineal con el nivel H para todas las posibles condiciones de operación.
Idealmente, la relación no lineal está definida por la ecuación (4.2), pero en una
válvula real hay una ecuación no lineal más compleja. Combinando las ecuaciones
(4.1) y (4.2) tenemos:
{4.3)
Esta ecuación es el modelo matemático que describe el comportamiento del sistema
y podemos ver de nuevo cosas no lineales en el modelo del sistema. En el problema
del nivel del tanque la no linealidad es suave y puede ser hecho lineal en un nivel
particular de operación H mediante el uso de la pendiente de la no linealidad en H.
Esto tiene el resultado importante que el modelo del sistema linealizado tiene
parámetros que dependen de las condiciones de operación. Los sistemas dinámicos
cambiaran como los cambios normales en el nivel de operación.
El modelo del sistema {3), es una ecuación diferencial de primer orden relacionando
el nivel del flujo de entrada Qi con el nivel de salida del agua H. en orden, para
disefiar un controlador lineal para el nivel del tanque, debemos linealizar la ecuación
considerando pequefias variaciones h cerca del nivel normal de operación del fluido
en el tanque. La ecuación es la siguiente:
n=n°+h
Donde no es el nivel normal de operación y es una constante, h es un pequefio
cambio cercano a ese nivel. Para pequefias variaciones de h cercanas a no podemos
aproximar la función no lineal mediante la tangente de no. Esto permite una ecuación
diferencial lineal:
dh T-+h=gq· dt l
(4.4)
Donde qi es la variación en el flujo de entrada Q¡ necesitado para mantener el nivel
de operación no. La constante de tiempo T y la ganancia gson función de los
parámetros y niveles de operación.
63

Sistema de nivel de líquidos de dos tanques
La planta consiste en un sistema de nivel de liquidos de dos tanques con interacción.
Figura N° 4.2 Sistema de nivel de dos tanques
~~ /1\
Tanquel ]~el
J Hl+hl Rl R2
H2+h2
-Q+ql Q+q2
Donde:
_ (m3) Q = velocidad del flujo en estado estacionario -seg
H1 = nivel del liquido estacionario en estado 1
H2 = nivel del liquido estacionario en estado 2
q1 = desviacion pequeña de la velocidad de la valvula 1
q2 = desviacion pequeña de la velocidad de la valvula 2
R1 = resistencia hidraulica al paso del flujo en la valvula 1
R2 = resistencia hidraulica al paso del flujo en la valvula 2
h1 = desviacion pequeña de la altura en el estado 1
h2 = desviacion pequeña de la altura en el estado 2
el = capacitancia del tanque 1
C2 = capacitancia del tanque 2
Considerando que el flujo a través de una restricción es laminar, la relación entre la
velocidad del flujo en estado estable y la altura en estado estable en el nivel de
restricción se obtiene que la resistencia es
dH H R = dQ = Q
64

La resistencia del flujo laminar es constante y análoga a la resistencia eléctrica.
Las ecuaciones dinámicas para el tanque 1 son:
h1 - h2 dh1 R1 = q1, el dt = q - q1
Las ecuaciones dinámicas para el tanque 2 son:
h2 dh1 Rz = q2, el dt = q - qt
Reemplazando se obtiene
Derivando
Reemplazando y ordenando se obtiene la ecuación dinámica del modelo matemático
que relaciona la salida con la entrada:
d2qz dqz elR1CzRz dt2 + (C1R1 + ezRz + Rzet) dt + qz = q (4.5)
Tomando transformadas de Laplace con condiciones iniciales iguales a cero se
obtiene la función de transferencia de esta planta consistente en un sistema de nivel
de dos tanque, considerando que el flujo es laminar
Qz 1 Q = e1R1e2R2s 2 + (e1R1 + e2R2 + R2e1)s + 1
(4.6)
65
4.2 SISTEMAS NEUMATICOS E HIDRAULICOS
En las aplicaciones industriales es frecuente equiparar los sistemas neumáticos y los
sistemas hidráulicos. A continuación se ofrece una breve comparación de estos dos
tipos de sistemas.
Comparación entre sistemas. El fluido que suele encontrarse en los sistemas
neumáticos es el aire; en los sistemas hidráulicos es el aceite. Y son principalmente
las propiedades distintas de los fluidos incorporados las que caracterizan las
diferencias entre estos dos sistemas:
1. El aire y los gases son comprensibles, pero el aceite no lo es.
2. El aire no tiene la propiedad lubricante y siempre contiene vapor de agua. El
aceite funciona como fluido hidráulico al igual que como lubricante.
3. La presión de operación normal de los sistemas neumáticos es mucho más
baja que de los sistemas hidráulicos.
4. La potencia de salida de los sistemas neumáticos son considerablemente
menores que los hidráulicos.
5. La precisión de los actuadores neumáticos es deficiente a bajas velocidades,
en tanto la precisión de los hidráulicos es satisfactoria en todas las
velocidades.
6. En los sistemas neumáticos se permite un cierto escape externo, pero que
debe evitarse el escape interno debido a que la diferencia de presión efectiva
es bastante pequena. En los sistemas hidráulicos se permite un cierto grado
de escape interno, pero debe evitarse el escape externo.
7. En los sistemas neumáticos no se requieren tubos de recuperación cuando
se usa aceite, en tanto que siempre se necesitan en los sistemas hidráulicos.
8. La temperatura de operación normal de los sistemas neumáticos es de 5 a
60°C (41 a 140°F). sin embargo el sistema neumático opera en el rango de O
a 200°C. los sistemas neumáticos son insensibles a los cambios de
temperatura, a diferencia de los sistemas hidráulicos, en los cuales la fricción
de los fluidos provocada por la viscosidad depende en gran parte de la
66
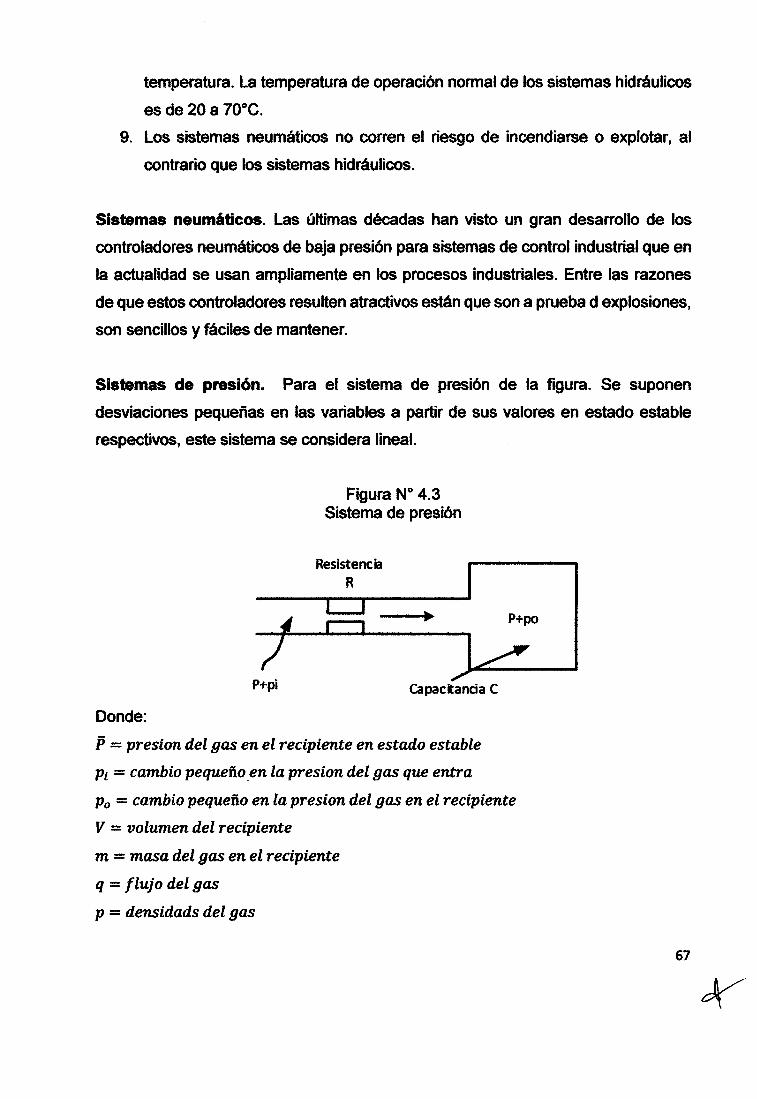
temperatura. La temperatura de operación normal de los sistemas hidráulicos
es de 20 a 70°C.
9. Los sistemas neumáticos no corren el riesgo de incendiarse o explotar, al
contrario que los sistemas hidráulicos.
Sistemas neumáticos. Las últimas décadas han visto un gran desarrollo de los
controladores neumáticos de baja presión para sistemas de control industrial que en
la actualidad se usan ampliamente en los procesos industriales. Entre las razones
de que estos controladores resulten atractivos están que son a prueba d explosiones,
son sencillos y fáciles de mantener.
Sistemas de presión. Para el sistema de presión de la figura. Se suponen
desviaciones pequeñas en las variables a partir de sus valores en estado estable
respectivos, este sistema se considera lineal.
P+pi
Donde:
Figura No 4.3 Sistema de presión
Resistencia R
--~• P+po
Capacitanda e
P = presion del gas en el recipiente en estado estable
Pi = cambio pequeño _en la presion del gas que entra
Po = cambio pequeño en la presion del gas en el recipiente
V = volumen del recipiente
m = masa del gas en el recipiente
q = flujo del gas
p = densidads del gas
67

Para valores pequeños de Pi y p0 , la resistencia R obtenida mediante la ecuación
cambio en la diferencia de presion del gas R = cambio en el flujo del gas
R = d(AP) dq
Donde d(AP) es un cambio pequeño en la diferencia de presión de gas y dq es un
cambio pequeño en el flujo de gas.
R =Pi-po q
la capacitancia del recipiente a presión se define mediante
cambio en el gas almacenado e = cambio en la presion del gas
e= dm =Vdp dp dp
Como el cambio de presión dp0 multiplicado por la capacitancia e es igual 1 gas
añadido al recipiente durante dt segundos, se obtiene
edp0 = qdt
edPo = Pt -Po dt R
lo cual se escribe como
~ ( 7 Re dt + Po = Pt 4. )
Entonces la función de transferencia del sistema de primer orden es
P0 (s) 1 Pt(s) = RCs + 1 (4.S)
donde RC tiene es la constante de tiempo del sistema
Sistemas hidráulicos. El uso de la circuitería hidráulica en las maquinas
herramientas, los sistemas de control de aeronaves y operaciones similares se ha
extendido debido a factores tales como positividad, precisión, flexibilidad, una alta
razón de peso-potencia, sus rápidos arranques, paro e inversión, que realiza con
suavidad y precisión, así como la simplicidad de sus operaciones.
68

La presión de operación de los sistemas hidráulicos es entre 145 y 500 lbf fplg 2
(entre 1 y 35 MPa). En algunas operaciones especiales la presión puede subir hasta
los 70 MPa. Por el mismo requerimiento de potencia, el peso y el tamano de la unidad
hidráulica se reducen a fin de aumentar la presión del suministro.
Es común una combinación de sistemas electrónicos e hidráulicos debido a que así
se combinan las ventajas del control electrónico y la potencia hidráulica.
Ventajas de los sistemas hidráulicos.
1. El fluido hidráulico funciona como lubricante, además de disipar el calor
generado en el sistema hacia un intercambiador de calor conveniente.
2. Los actuadores hidráulicos pequenos desarrollan fuerzas o pares grandes.
3. Los actuadores hidráulicos tienen una velocidad de respuesta más alta para
arranques, paros e inversiones de velocidad rápidos.
4. Los actuadores hidráulicos operan sin daño bajo condiciones continuas,
intermitentes, invertidas y de perdida de velocidad.
5. La disponibilidad de actuadores lineales y rotacionales aporta flexibilidad al
diseño.
6. Debido a los bajos escapes en los actuadores hidráulicos, la disminución de
la velocidad cuando se aplica una carga es pequeña.
Desventajas de los sistemas hidráulicos.
1. No es tan sencillo contar con la potencia hidráulica como con la potencia
eléctrica.
2. El costo de un sistema hidráulico puede ser más alto que el de un sistema
eléctrico comparable cuando realice una función similar.
3. Existen riesgos de incendio y explosión, a menos que se usen fluidos
resistentes al fuego.
4. Debido a que es dificil mantener un sistema hidráulico libre de escapes, el
sistema tiende a ser complicado.
69

5. El aceite contaminado puede provocar fallos en el funcionamiento adecuado
de un sistema hidráulico.
6. Como resultado de las características no lineales y otras condiciones
complejas implícitas, en el diseño de los sistemas hidráulicos complejos es
muy complicado.
7. Por lo general, los circuitos hidráulicos tienen características deficientes de
amortiguamiento. Si un circuito hidráulicos no se diseña de forma adecuada
pueden ocurrir o desaparecer fenómenos inestables, dependiendo de las
condiciones de operación.
Comentarios. Es necesaria una atención especial a fin de asegurar que el sistema
hidráulico sea estable y satisfactorio en todas las condiciones de operación. Como
la viscosidad del fluido hidráulico afecta de manera significativa los efectos de
amortiguamiento y la fricción de los circuitos hidráulicos, deben realizarse pruebas
de estabilidad a la temperatura de operación más alta posible. Obsérvese que casi
todos los sistemas hidráulicos son no lineales. Sin embargo, en ocasiones es posible
linealizar los sistemas no lineales con el fin de reducir su complejidad y permitir
soluciones suficientemente precisas para la gran parte de los propósitos.
4.3 SISTEMAS TERMICOS
Considérese el sistema que aparece en la figura. Se supone que el tanque está
aislado para eliminar las pérdidas de calor hacia el aire circundante.
Fig. N°4.4 Sistema térmico
Liquido caliente r-~--~~----------.. .-----
Liquido fri"'"-----' mezclador ---.. ----------------~
70

También se supone que no hay almacenamiento de calor en el aislamiento y que el
liquido del tanque está perfectamente mezclado, por lo que tiene una temperatura
estable. De este modo, se usa una sola temperatura para describir la del liquido en
el tanque y la del líquido que sale.
Sean:
8i = temperatura en estado estable del liquido que entra, oc 80 = temperatura en estado estable del liquido que sale, °C
G = velocidad de flujo del liquido en estado estable, Kgfseg
M = masa del liquido en el tanque, Kg
e= calor especifico delliquido,KcalfKg oc R = resiostencia termica, oc segfkcal
C = capacitancia termica, K cal ¡oC
H =entrada del flujo de calor en estado estable,Kcalfseg
Supóngase que la temperatura del líquido que entra se mantiene constante y que el
flujo de calor de entrada al sistema (calor que proporciona el calefactor) cambia
repentinamente de H a H + h¡ donde hi representa un cambio pequefto en el flujo de
calor de entrada. El flujo de calor de salida cambiara, entonces de forma gradual, de
Ha H + h0 • La temperatura del liquido que sale también cambiara de 80 a 80 + 8.
Para este caso h0 , e , R se obtienen, respectivamente como
h0 = Gc8
C=Mc
8 1 R=-=-
h0 Gc
La ecuación diferencial para este sistema es
Que puede reescribirse como
Cd8 = (ht - h0 )dt
d8 C-=ht-h dt o
71
d8 RC dt + 8 = Rht
Obsérvese que la constante de tiempo del sistema es igual a RC o M/G segundos.
La función de transferencia se obtiene mediante
80 (S) R Hi(s) = RCs + 1
En la práctica, la temperatura del liquido que entra puede fluctuar y actuar como
perturbación de carga. (Si se pretende mantener una temperatura de salida
constante, puede instalarse un controlador automático que ajuste el flujo de calor de
entrada, con el propósito de compensar las fluctuaciones de temperatura del líquido
que entra.) Si la temperatura del liquido que entra cambia repentinamente de
Bt a Bt + 8i, mientras que el flujo de calor de entrada H y el flujo del liquido G se
conservan constantes, el flujo de calor de salida cambiara H a H + h0 y la
temperatura del liquido que sale cambiara de 80 a 80 + 8.
La ecuación diferencial para este caso es
Cd8 = (Gc8i - h0 )dt
d8 C-= Gc8t-h dt o
Que puede escribirse como d8
RC-+ 8 = 8· (4.2) dt l
La función de transferencia que relaciona 8 y 8t se obtiene mediante 8(s) 1 8i(s) = RCs + 1 <4·3)
Si este sistema ténnico está sujeto a cambios en la temperatura del Uquido que entra
y en el flujo de calor de entrada, en tanto que el flujo del liquido se conserva
constante, el cambio 9 en la temperatura del liquido que sale se obtiene mediante la
siguiente ecuación:
d8 RC-+8 = 8· +Rh· dt l '
(4.4)
72

IV. REFERENCIALES
BALACHANDRAN, BALAKUMAR. Vibraciones. México: Thomson, 2006
BOL TON, W. lngenierla de control. México: Alfaomega, 2001
BOLZERN, PAOLO. SCATIOLINI, RICCARDO. SCHIAVONI, NICOLA. Fundamentos de control automático. España: Me Graw Hill, 2009
CHAPRA, STEVEN C. CANALE, RAYMONO P. Método numéricos para ingenieros. México: McGraw-Hilllnteramericana, 2008.
CREUS SOLE, ANTONIO. Neumática e Hidráulica. España: Alfaomega, 2007.
DORF, RICHARD. BISHOP, ROBERT. Sistemas de control moderno. España: Pearson educativa, 2005.
FERNANDEZ RAf'iADA, ANTONIO. Dinámica Clásica. México: Fondo de cultura económica, 2005.
FRANKLIN, GENE. POWELL, DAVID, EMAMI-NAEINI, ABBAS. Control de sistemas dinámicos con retroalimentación. USA: Addison Wesley, 1991.
HUANG, T.C. Mecánica para Ingenieros, Dinámica. México: Fondo educativo interamericano, S.A., 1967
KUO, BENJAMIN. Sistemas de control automático. México: Prentice Hall, 1996.
LEWIS, PAUL. YANG, CHANG. Sistemas de control en ingenierla. España: Prentice Hall, 2000.
NAVARRO VIADANA, RINA.Ingeniería de control. México: Me Graw Hill, 2004.
OGATA, KATSUHIKO. Ingeniería de control moderna. España: Pearson educación, 201 O.
STARZHINSKI, V. Mecánica Teórica. URSS: Mir, 1985.
TAYLOR, JOHN R. Mecánica clásica. España: Reverte, 2013
THOMSON, WILLIAM T. Teoría de vibraciones. México: Prentice-Hall, 1982
UMEZ-ERONINI, ERONINI. Dinámica de sistemas y control. Mexico: Thomson, 2001.
73
V. APENDICE (Autoría propia)
Coordenadas generalizadas
Consideremos un sistema binario de N partículas, a = 1, ... , N con posiciones ra.
Decimos que los parámetros q11 ••• , qn son un conjunto de coordenadas
generalizadas para el sistema si cada posición ra se puede expresar como una
función de q11 ... , qn y posiblemente del tiempo t.
Ta = Ta(Qv ... ,qn, t), a= 1, ... ,N
y al revés, cada q¡ se puede expresar en términos de las ra y posiblemente t,
qi=q¡(rv ... ,rN,t), i=l, ... ,N
Además, necesitamos que el número de coordenadas generalizadas n sea el más
pequeño que permita parametrizar el sistema de esta manera.
En nuestro mundo tridimensional, el número n de coordenadas generalizadas para
N partículas es ciertamente no mayor que 3N, y para un sistema ligado es
normalmente menor.
Grados de libertad
El número de grados de libertad de un sistema es el número de coordenadas que
pueden variar de manera independiente en un pequeño desplazamiento, es decir, el
número de direcciones independientes en el que se puede mover un sistema a partir
de cualquier configuración inicial.
Por ejemplo un péndulo simple tiene un grado de libertad, mientras que el péndulo
doble tiene dos grados de libertad.
Cualquier partícula con libertad para moverse en las tres dimensiones tiene tres
grados de libertad, mientras que un gas compuesto por N partículas tiene 3N.
En todos los ejemplos proporcionados hasta el momento, el número de grados de
libertad equivalen al número de coordenadas generalizadas necesarias para
describir la configuración del sistema. Un sistema con esta propiedad,
aparentemente natural se dice que es holómono. Es decir un sistema holómono tiene
n grados de libertad y puede describirse mediante n coordenadas generalizadas.
74
Fuerza conservativa
En física, un campo de fuerzas es conservativo si el trabajo total realizado por el
campo sobre una partícula que realiza un desplazamiento en una trayectoria cerrada
(como la órbita de un planeta) es nulo. El nombre conservativo se debe a que para
una fuerza de ese tipo existe una forma especialmente simple (en términos
de energía potencial) de la ley de conservación de la energía. Las fuerzas que
dependen sólo de la posición son típicamente conservativas. Un ejemplo de fuerza
conservativa es la fuerza gravitatoria de la mecánica newtoniana. Las fuerzas
dependientes del tiempo o de la velocidad (por ejemplo, la fricción o rozamiento) son
típicamente no conservativas. La mayoría de sistemas físicos fuera del equilibrio
termodinámico son no-conservativos; en ellos la energía se disipa por procesos
análogos al rozamiento.
Momento de inercia
El momento de inercia es una medida de la inercia rotacional de un cuerpo. Cuando
un cuerpo gira en torno a uno de los ejes principales de inercia, la inercia rotacional
puede ser representada como una magnitud escalar llamada momento de inercia.
Sin embargo, en el caso más general posible la inercia rotacional debe representarse
por medio de un conjunto de momentos de inercia y componentes que forman el
llamado tensor de inercia. La descripción tensorial es necesaria para el análisis de
sistemas complejos, como por ejemplo en movimientos giroscópicos.
El momento de inercia refleja la distribución de masa de un cuerpo o de un sistema
de partículas en rotación, respecto a un eje de giro. El momento de inercia sólo
depende de la geometría del cuerpo y de la posición del eje de giro; pero no depende
de las fuerzas que intervienen en el movimiento.
El momento de inercia desempeña un papel análogo al de la masa inercial en el caso
del movimiento rectilíneo y uniforme. Es el valor escalar del momento
angular longitudinal de un sólido rígido.
75

VI. ANEXOS
En el desarrollo del texto no se ha utilizado tablas, cuadros figuras graficas como
fuente de información.
76