
Vibraciones Mecanicas_Cap 1
21
1 CAPÍTULO 1: UNA VISIÓN PANORÁMICA DE LAS VIBRACIONES DE MÁQUINAS Ronald L. Eshleman, Ph.D., P.E. Vibration Institute Willowbrook, Illinois
-
Upload
ismael-tobon-ortiz -
Category
Documents
-
view
37 -
download
2
Transcript of Vibraciones Mecanicas_Cap 1
-
1
CAPTULO 1: UNA VISIN PANORMICA DE LAS VIBRACIONES DE MQUINAS
Ronald L. Eshleman, Ph.D., P.E. Vibration Institute
Willowbrook, Illinois
-
2
UNA VISIN PANORMICA DE LAS VIBRACIONES DE MQUINAS RESUMEN GENERAL DE VIBRACIONES EN MQUINAS
Tradicionalmente, las vibraciones se han asociado a problemas, tales como; desgaste, funcionamiento defectuoso, ruido y dao estructural de las mquinas. Sin embargo, en la actualidad, adems de determinar las fallas y la condicin del equipo, las vibraciones se han convertido en parte esencial de la mayora de los programas de mantenimiento. La medicin de la vibracin (desplazamiento, velocidad y aceleracin) se complementa con las caractersticas de diseo de las mquinas para resolver problemas de diseo; as como fallas crnicas en mquinas. En este captulo trataremos sobre las propiedades fsicas de las vibraciones en las mquinas. Las propiedades propias o especficas de sistemas vibratorios -mediciones, movimientos, ngulo de fase, excitacin, frecuencia natural, forma modal, velocidad crtica, resonancia y estabilidad - se definen en detalle.
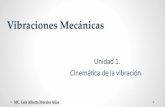
LA NATURALEZA FSICA DE LA VIBRACIN Los objetos mecnicos vibran u oscilan, en respuesta a una fuerza vibratoria o de
excitacin, ver la Figura 1. Sin embargo, la vibracin tambin depende de las caractersticas estructurales del sistema, tales como; masa, rigidez y amortiguacin. La masa de un objeto es igual al volumen del material que lo comprende, multiplicado por su densidad. La masa est relacionada al peso. La rigidez depende de la elasticidad del material y se expresa como la fuerza por unidad de deflexin (lb/pulg). El amortiguamiento es una medida de la capacidad del sistema para disipar energa en forma de calor.
La excitacin es usualmente regulada por; las tolerancias y defectos dentro del sistema, los procedimientos de fabricacin e instalacin y los procesos para los cuales el sistema ha sido diseado. Las tres caractersticas de la vibracin son; frecuencia, amplitud y fase. El periodo, el cual est asociado con la frecuencia, es el tiempo requerido para que una oscilacin complete un ciclo y es expresado en segundos (Figura 2). La
Figura 1. Naturaleza de la Causa y Efecto de la Vibracin de una Mquina
movimiento
Fuerzas transmitidas
Fuerza vibracional
-
3
frecuencia es el nmero de ciclos por unidad de tiempo y se expresa en ciclos por segundo (Hz) o ciclos por minuto (CPM). Cuando las velocidades criticas estn presentes y la vibracin es inducida por una fuerza a la velocidad de rotacin o por algn mltiplo de sta, la frecuencia se expresa en revoluciones por minuto (RPM). La amplitud es la mxima medida en una mquina que vibra. La Tabla 1 muestra las unidades usadas para medir la amplitud de vibracin. La fase es la relacin de tiempos en vibraciones de la misma frecuencia entre dos puntos de la mquina. La fase define la ubicacin angular en la cual la vibracin del eje giratorio encuentra su pico. (Figura 2). La fase describe la relacin angular o de tiempo existente entre la vibracin y la fuerza que la origina.
Tabla 1. Mediciones de la Amplitud de la Vibracin
AMPLITUD UNIDAD
Desplazamiento, D mils pico pico
velocidad, V pulg/seg pico o RMS
aceleracin, A gs pico o RMS
1 g = 386.1 pulg/seg2
MOVIMIENTO VIBRATORIO En la mayora de casos, las vibraciones se repiten a intervalos de tiempo iguales, es
decir, son peridicos. La forma de onda mostrada en la Figura 2 es peridica y armnica (de frecuencia nica). La forma de onda puede ser obtenida en forma digitalizada desde un analizador de espectros FFT. Una seal similar podra ser obtenida de un osciloscopio analgico o digital. El perodo es de 0.016 segundos (seg) o 16 milisegundos (mseg), lo que significa que se requieren 16 milisegundos para completar un ciclo. La frecuencia de la vibracin resulta de dividir 1 entre el periodo; o sea, 62.5 Hz (3,750 CPM). Un Hz es igual a sesenta ciclos por minuto. Los CPM pueden ser calculados multiplicando 60 por el nmero de Hz. Una forma de onda como la de la Figura 2 es armnica porque puede ser representada por la funcin seno. La ecuacin proporciona la magnitud de vibracin en cualquier momento del ciclo de rotacin del eje. El desbalance de masas es una causa de la forma de onda armnica. La Figura 2 muestra la vibracin sincrnica con la rotacin del eje (1X).
-
4
Figura 2.
x = A sen (2pi/) t x = vibracin en cualquier instante t
A = amplitud de vibracin pico = perodo, ciclos por segundo
f = frecuencia, 1/, ciclos por segundo (Hz) pi = 3.1416
La amplitud, o vibracin pico, en la Figura 2 es 0.225 pulg/seg. La forma de onda que representa la vibracin puede ser escrita como:
x = 0.225 Sen ((2pi/0.016)t) x = 0.225 Sen (392.5 t)
La magnitud de la vibracin en cualquier instante puede ser calculada con esta ecuacin. Por ejemplo, podemos calcular la magnitud de la vibracin para 5 milisegundos; para lo cual, se determina que el argumento de la funcin seno es (392.5)(0.005) = 1.96 radianes 1.96 x 360/2 pi = 112.5. Con una calculadora se puede determinar el seno de 112.5, el cual es 0.924. La magnitud de la vibraci n es: (0.225) (0.924) = 0.208 pulg/seg.
-
5
Los analizadores y medidores pueden indicar la amplitud en 3 formas: pico, RMS o pico a pico. Para la forma de onda armnica (sinusoidal) mostrada en la Figura 2 la amplitud puede ser expresada como:
Raz media cuadrtica = 0.707 pico = 0.707 x 0.225 = 0.159 pulg/seg RMS Pico a pico = 2 x pico = 2 x 0.225 = 0.45 pulg/seg p-p
Es importante recordar, sin embargo, que estas relaciones son validas slo si la forma de onda es armnica. Si el instrumento usado indica slo una medida y hace falta otra, entonces la ecuacin dada ms arriba puede ser usada slo para seales filtradas. Las diferencias entre las magnitudes son grandes en el ejemplo anterior, pueden variar desde 0.159 pulg/seg a 0.45 pulg/seg. Por lo tanto, es necesario aplicar la medicin correcta cuando se evala la severidad de la vibracin. Si la seal no es armnica o sea si hay ms de una frecuencia involucrada entonces la medicin global o total no puede ser cambiada. As la medicin global en RMS no puede ser cambiada a pico o a pico-pico o viceversa. Pico-pico no puede ser cambiado a pico sin la forma de onda de tiempo porque las magnitudes positivas y negativas no son iguales.
Figura 3.
-
6
La amplitud de una seal de vibracin puede ser convertida s y solo s, hay una nica frecuencia en el espectro. Como los armnicos convertidos se encuentran en desfase, no pueden ser combinados para obtener un nivel global o total. Un procesador de seales tpico no proporciona informacin respecto a la fase de las armnicas.
La mayora de vibraciones en mquinas son peridicas pero no armnicas. Un movimiento peridico se repite durante un periodo dado de tiempo; pero no es sinusoidal la vibracin del motor representada en la Figura 3, es un ejemplo.
La frecuencia fundamental es la base para el anlisis de la vibracin. La mejor manera de obtener la frecuencia fundamental, es a partir de la seal en el dominio del tiempo. El tiempo entre eventos principales en la seal de dominio del tiempo de la Figura 3, es 65.8 milisegundos. Esto es igual a una frecuencia de 1/0.0658 = 15.2 Hz o 912 CPM (f = 1/, donde esta en segundos). El motor Diesel de cuatro ciclos de carrera, tiene un ciclo de encendido cada dos revoluciones del cigeal por ciclo de vibracin. La frecuencia fundamental de 912 CPM es la mitad de la velocidad de operacin del motor que es 1824 RPM. Se puede ver en la seal de dominio del tiempo de la Figura 3, que existe un componente de la vibracin a una frecuencia ms elevada, hay 5 picos en un ciclo de vibracin. Por lo tanto, la frecuencia es cinco veces 912 CPM 4560 CPM (76 Hz), la cual es igual a 2.5 veces la velocidad de operacin del motor. VELOCIDAD ANGULAR Y FASE
Es a menudo conveniente relacionar la vibracin y la fuerza con vectores giratorios para visualizar su fase. En las aplicaciones se incluyen; los pulsos que existen entre las seales de vibracin de fuentes adyacentes, en el balanceo de maquinas rotativas y en los ensayos modales. Los vectores mostrados en la Figura 4, giran a una velocidad angular constante; o sea, que giran un ngulo de 360 en un tiempo dado. Si las posiciones de las puntas de los vectores son trazadas en la pantalla de un osciloscopio a una velocidad de barrido igual a la frecuencia de la velocidad angular, se obtendr una onda sinusoidal trazada en la pantalla. La velocidad angular est relacionada directamente con la frecuencia de la vibracin, mediante la siguiente ecuacin:
= 2pif = velocidad angular, radianes/seg
f = frecuencia, ciclos/seg
Un ciclo es igual a 2pi radianes, el cual es igual a 360.
-
7
Figura 4. Velocidad Angular y Angulo de Fase
La seal vibratoria mostrada en la Figura 4, est desfasada de la fuerza en un ngulo . Como la fuerza F origina la vibracin, siempre estar adelantada a la seal de respuesta. El producto del tiempo t y la velocidad angular proporciona, en radianes (rad), la posicin angular de los dos vectores giratorios en cualquier instante; (rad/seg)(seg) = radianes. Los radianes pueden ser convertidos a grados (57.32 grados / radianes).
La magnitud de la fuerza en cualquier instante t puede ser calculada de la Figura 4 usando la amplitud del vector Fo y el ngulo instantneo t: (2pif)t.
F = Fo Sen t Fo = amplitud de fuerza, lbs
= 2pif, velocidad angular en rad/seg f = frecuencia vibratoria, ciclos/segs.
t = instante para el cual la fuerza es calculada
La magnitud de la vibracin causada por la fuerza, tambin puede ser determinada de la Figura 4. La vibracin esta retrasada, con respecto a la fuerza, en un ngulo - La magnitud instantnea de la vibracin se calcula con la siguiente ecuacin.
x = A Sen(t - ) x = magnitud de la vibracin en el instante t
A = amplitud de la vibracin en mils, pulg/seg o gs = 2pif, velocidad angular.
= ngulo de fase entre la fuerza y la vibracin, radianes
-
8
Para balancear, se mide el ngulo de fase entre una marca en el eje y la vibracin con un instrumento vectorial de balanceo o con un osciloscopio. Los ensayos de calibracin son necesarios para establecer la relacin existente entre la marca del eje y el punto crtico.
En el siguiente ejemplo utilizamos la ecuacin anterior para calcular la magnitud de la vibracin. Considere que la vibracin se encuentra retrasada con respecto a la fuerza en 45; que la velocidad de la mquina es de 1800 RPM; que la amplitud de la vibracin es de 5 mils y que se desea calcular la magnitud de la vibracin a los 6 milisegundos.
= 2pif = 2piN/60 = 2pix1800/60 = 188.4 rad/segs. N = velocidad del rotor, en RPM.
f = frecuencia, ciclos por segundo (ciclos/seg) (Hz) x = 5 Sen(188.4 rad/segs x 0.006segs x 360/2 pi rad 45)
x = 5 Sen19.8 = 1.7 mils pico
RELACIN ENTRE EL DESPLAZAMIENTO, LA VELOCIDAD Y LA ACELERACIN Las relaciones de amplitud RMS con la amplitud pico, para una medida tal como la
velocidad de la vibracin ya han sido dadas. Cuando una seal es armnica, existen relaciones de amplitud y de fase con el desplazamiento, con la velocidad y con la aceleracin del movimiento vibratorio obtenido con un sensor, ver la Figura 5. La seal de la velocidad se adelanta 90 con respecto al desplazamiento en fase y se retrasa con respecto a la aceleracin en 90. Las relaciones de amplitud y fase para los tres parmetros se muestran en la Tabla 2.
Figura 5. Desplazamiento, Velocidad, Aceleracin de un Movimiento Armnico
-
9
Tabla 2. Relaciones entre el Desplazamiento, Velocidad y Aceleracin
PARAMETRO AMPLITUD FASE (Radianes) Desplazamiento D 0 Velocidad D pi/2 Aceleracin D2 pi
Si se mide la amplitud D del desplazamiento, la velocidad o tasa de cambio del desplazamiento con respecto al tiempo adelantar a la fase pi/2 radianes (90) y tiene una magnitud igual a D (2pifD). La aceleracin es la velocidad del cambio de la velocidad con respecto al tiempo, se adelanta a la velocidad en pi/2 radianes (90) y al desplazamiento en pi radianes (180). La magnitud de la aceleracin es multiplicada por la velocidad (V) 2 multiplicado por el desplazamiento (D).
Ejemplo: Un acelermetro mide una vibracin de 2gs pico a 500 Hz. Cules son las amplitudes de la velocidad y del desplazamiento?
Estos resultados demuestran que para frecuencias elevadas los desplazamientos son de baja magnitud. En el extremo inferior del espectro de frecuencias, la aceleracin a 5 Hz (300 CPM) puede ser calculada para una seal de vibracin de 10 mils (pico pico).
A = 2D A = (2pif)2(D / 2) / (386.1)(1000)
A = (2pi x 5)2(10 / 2) / (386.1)(1000) A = 0.013 g (pico)
Por esta razn, a bajas frecuencias resulta difcil medir la aceleracin.
A = V2pif V = A/2pif A = aceleracin pulg/seg2 (pico)
V = velocidad pulg/seg (pico) f = frecuencia, ciclos / seg (Hz)
g = 386.1 plg/seg2
V =(2g)(386.1 pulg/seg2 / g) / (2pi500) V = 0.25 pulg / seg (pico)
D = V / w = V / 2pif (pulg pico) D = 2 (V/2pif) 1000 (mils pico - pico)
V = velocidad, pulg/seg (pico) f = frecuencia ciclos/seg
D = desplazamiento, mils (pico pico) D = (2 (0.25) / (2pi500)) x 1000
D = 0.16 mils (pico pico)
-
10
0 2 4 6
2
0
2
sin x( ) sin 2x 3.1416+( )+
x0 2 4 6
2
0
2
sin x( ) sin 2x( )+
x
0 2 4 6
2
0
2
sin x( )
sin 2x( )
x
0 2 4 6
2
0
2
sin x( )
sin 2x 3.1416+( )
x
0 5
2
0
2
sin x( ) sin 2x 3.14162
+
+
x
0 2 4 6
2
0
2
sin x( ) sin 2x 3 3.14162
+
+
x
0 2 4 6
2
0
2
sin x( )
sin 2x3.1416
2+
x0 2 4 6
2
0
2
sin x( )
sin 2x 33.1416
2+
x
MOVIMIENTO PERIDICO El perodo de vibracin de la mayora de las mquinas es de una revolucin del eje,
an cuando la seal es complicada. El patrn peridico puede usualmente ser identificado en el dominio del tiempo. La Figura 6 muestra dos componentes armnicos de una seal de vibracin, los cuales tienen la misma amplitud pero diferentes fases. La frecuencia del componente de segundo orden es igual a dos veces la del primer orden. Esta relacin es a menudo encontrada en las mquinas. La combinacin de las fases de los dos componentes armnicos determina la forma de la seal medida por un transductor. Lo inverso tambin es aplicable: la forma de la seal medida proporciona informacin respecto a la fase existente entre los componentes.
Figura 6. Formas de Onda en el Tiempo, por Efecto de las Fases Entre Dos Componentes Armnicos (1X y 2X)
-
11
El dominio del tiempo, obtenido directamente del transductor, proporciona informacin respecto a la magnitud, frecuencia y fase del origen de la vibracin. Sin embargo, tpicamente, solo la amplitud total y el perodo fundamental pueden ser cuantificados. Es necesario realizar un anlisis adicional de la seal de vibracin para determinar el contenido de las frecuencias y las relaciones de fase. El anlisis de frecuencia (Figura 7) brinda informacin acerca de la magnitud de la vibracin presente en cada una de las frecuencias componentes de la seal y ayuda en la identificacin del origen de la vibracin. El dominio de la frecuencia es usado para identificar el origen de la vibracin y la severidad est relacionada con la amplitud de vibracin.
Figura 7. Anlisis de Armnicas (Fourier)
Los componentes de la seal mostrada en la Figura 7 han sido obtenidos por un proceso llamado la Transformada Rpida de Fourier (FFT), el cual es ejecutado por los filtros de un analizador o por el software de una computadora. El proceso se describe en el captulo 3 (Usos y Limitaciones de la Instrumentacin). EXCITACIN EN MAQUINARIAS
Las fuerzas vibratorias que actan sobre una mquina en forma interna o externa causan vibraciones que a menudo son llamadas excitaciones que, generalmente, no pueden ser medidos directamente; sus orgenes y algunas veces sus magnitudes deben ser inferidos o calculados a partir de la vibracin que causan. Afortunadamente, existe una relacin de equivalencia entre las frecuencias de vibracin medidas en las tapas de cojinetes o en el eje con las frecuencias de excitacin. Esta relacin se ilustra en la Figura 8. La salida (o sea, la
-
12
vibracin) es la cantidad medida, cuando queremos saber sobre la entrada (o sea, las fuerzas) generadas interna o externamente que causan problemas en la mquina.
Figura 8. Respuesta Vibratoria en un Sistema Lineal
Sin embargo, la magnitud de la vibracin no proporciona informacin directa, sobre la magnitud de la fuerza, porque sta depende de varios parmetros, tales como; diseo de la mquina, ciclo del proceso, severidad de defectos (desbalance, fallas de cojinetes, desalineamiento y problemas de instalacin). Una funcin de transferencia es necesaria para encontrar la magnitud de la fuerza a partir de los datos de vibracin. El proceso de encontrar la funcin de transferencia es llamado sistema de identificacin.
En el sistema de identificacin, se miden las vibraciones causadas por las fuerzas generadas por martillos o vibradores, para proporcionar los datos de causa y efecto. Estos datos son usados, luego, con las medidas de vibracin para obtener informacin acerca de la excitacin. En el balanceo se utilizan pesos de prueba, para obtener las funciones de transferencia del retraso de fase y de sensibilidad al balanceo. El peso de prueba conocido es la fuerza aplicada al rotor. La vibracin resultante es extrada, mediante diagramas vectoriales, de la vibracin original.
Las excitaciones que causan vibraciones en las mquinas originan desgaste, funcionamiento defectuoso y dao estructural. Las causas de la excitacin se presentan en la Tabla 3. El desbalance de masas origina vibraciones a la velocidad de operacin de la mquina (1x). Entre las causas del desbalance se incluye falta de homogeneidad del material;
-
13
errores en el maquinado; desbalance inherente de la masa de la mquina debido al diseo; acumulacin dispareja de residuos como resultado de la operacin de la mquina y desgaste de partes de la mquina. Los ejes doblados y desalineados debido a fallas en la construccin e instalacin, tambin causan vibraciones a la velocidad de operacin de la mquina. Se pueden presentar frecuencias ms elevadas debido a la geometra y a las restricciones de la mquina. El diseo de los rodamientos y el de los acoplamientos alteran el contenido de las frecuencias generadas por los desalineamientos. Las fallas en los rodamientos envan ondas de choque a las partes adyacentes del sistema. Los acoplamientos trabados inducen una precarga similar al desalineamiento. Las solturas mecnicas causan vibraciones a frecuencias que son armnicas y subarmnicas de la velocidad de operacin de la mquina. Las causas de la soltura son el desgaste, las tolerancias de diseo y las fallas en la instalacin. Los cardanes causan vibraciones a una frecuencia igual a dos veces la velocidad de operacin (2X) y que aumenta a medida que el ngulo de trabajo del cardn aumenta la fuerza. La frecuencia de excitacin de los engranajes, acoplamientos, fajas e impulsores es mltiplo de la velocidad de operacin de los dientes, mordazas, longitud y costura de la faja, poleas y alabes, respectivamente. El mecanismo biela manivela de un motor, bomba o compresor reciprocantes, genera frecuencias de excitacin que son mltiplos de la velocidad de operacin. Las bombas, los ventiladores y los compresores, generan una frecuencia de paso en los labes que es igual al nmero de alabes multiplicado por las RPM. Una carga de impacto, como la causada por una punzonadora, produce un nmero de frecuencias que dependen de la forma de onda del pulso de choque y de la frecuencia natural del sistema.
-
14
Tabla 3. Fuentes de Excitacin de Mquinas
FUENTE FRECUENCIA (MLTIPLOS DE RPM)
Falla Inducida
Desbalance de masas 1X
Desalineamiento 1X, 2X y algunas ms elevadas
Eje deflexionado 1X
Soltura y desgaste mecnico Armnicas
Distorsin de la carcasa y de la cimentacin (trmico y mecnico) 1X, algunas ms elevadas
Acoplamiento trabado 1X y 2X
Fallas en cojinetes antifriccin Frecuencias de cojinetes
Diseo Inducido
Cardanes 2X
Ejes y soportes asimtricos 2X
Engranajes (n dientes) nx
Acoplamientos (m mordazas) mx Cojinetes de friccin, con pelcula de aceite 0.5X, 1X
Alabes (m) mx
Mecanismo biela manivela Mltiplo de la velocidad, dependiendo del diseo.
Mecanismos de impacto Mltiples frecuencias, dependen de la forma de onda.
Polos y ranuras de motores Mltiplos de los polos.
Soportes no Lineales Subarmnicas y armnicas.
-
15
RESPUESTA VIBRATORIA DE LAS MQUINAS Una mquina rotativa tpica est compuesta de varios componentes estructurales;
rotor, discos, soportes de rodamientos, pedestales, cimentacin y carcasa. Estos componentes flexibles y macizos absorben y disipan energa cuando estn sometidos a alteraciones internas y producen un patrn nico de movimiento llamado respuesta. La respuesta est relacionada con el diseo de la mquina y es una indicacin de las deflexiones y esfuerzos que el sistema esta siendo sometido. La respuesta vibratoria de una mquina sirve para localizar las fallas y para evaluar daos y desgaste.
Las frecuencias naturales y las formas modales de un rotor se muestran en la Figura 9, las frecuencias naturales son aquellas a las cules la mquina vibrar cuando es sometida a un impacto. Una mquina, sus tuberas y su cimentacin tienen un nmero natural de frecuencias caractersticas que dependen del diseo del sistema. Estas frecuencias naturales son interactivas, por lo tanto; las frecuencias naturales de los componentes de las mquinas no son independientes una de la otra y tampoco son mltiplos. La masa y rigidez de la mquina y de sus componentes gobiernan las formas modales no amortiguadas. Las fuerzas no influyen en las formas modales. Una forma modal es la forma vibratoria adoptada por un rotor que vibra en una frecuencia natural, no tiene amplitud absoluta y est relacionada con eventos que suceden en ubicaciones adyacentes en el sistema.
Figura 9. Frecuencia Natural y Forma Modal
Cuando se requiera la magnitud de la vibracin, se deber tener en consideracin las fuerzas y el amortiguamiento. Las caractersticas estructurales de una mquina son: 1) El amortiguamiento, que atena la vibracin trasmitida al sensor y 2) La distribucin de la masa y de la rigidez, que podra amplificar o atenuar los efectos de las fuerzas que causan la vibracin.
-
16
Se dice que existe un estado de resonancia, cuando la frecuencia de una excitacin es igual a la frecuencia natural de una mquina. En otras palabras, la vibracin se amplifica. Si la excitacin es causada por un rotor, la frecuencia resonante es llamada velocidad crtica. De hecho, cuando la frecuencia de la excitacin est dentro del 15% al 20% de la frecuencia natural, la vibracin es amplificada. La amplificacin de una excitacin en las inmediaciones de una frecuencia natural se muestra en la Figura 10. La amplificacin depende del amortiguamiento. La vibracin pico de la resonancia, f/fn = 1, disminuye cuando el amortiguamiento aumenta. En sistemas mecnicos, son tpicos los valores de amortiguacin inferiores que 0.08 c/cc.
Figura 10. Frecuencias de Respuesta de un Sistema de Vibracin Simple
-
17
La Figura 10a es un grfico de la relacin entre el desplazamiento x de un sistema masa-resorte y una fuerza F aplicada a una masa a diversas frecuencias forzantes f. La respuesta se presenta en una forma adimensional x/(F/k) versus f/fn para varios valores de amortiguamiento y por lo tanto se aplica a muchos casos. El pequeo modelo amortiguador-masa-resorte representa un modo de vibracin de una mquina o estructura.
La magnitud de vibracin en cualquier punto de una mquina debido a un modo causado por una excitacin puede ser calculada multiplicando la respuesta obtenida de la Figura 10a por un factor modal de la forma modal (Figura 9). Las contribuciones de todos los modos excitados por la fuerza se suman para obtener la vibracin total de la mquina (ver Figura 11).
Si las magnitudes de vibracin en el centro del rotor de la turbina de vapor mostrada en la Figura 12, fueran conocidas, entonces las fuerzas de; la masa desbalanceada y la excentricidad podran ser aproximadas con unos clculos simples, utilizando la informacin dada en la Figura 10. Se puede calcular un valor para la velocidad crtica sin amortiguar del rotor a partir de la siguiente ecuacin:
NCR = 60/2pi WgkT / Resortes en paralelo KT1 = kb + kb = 2 kb
Resortes en serie KT = kT1 x ks / (kT1 + ks) KT =2kbks /(2kb + ks)
Resortes en paralelo (dos cojinetes) y en serie (el eje y el equivalente de los cojinetes) kT = 4,000,000 (400,000)/4,400,000 = 363,363 lbs/pulg NCR = 60/2pi 000,1/)1.386(363,363 = 3580 RPM.
Se puede calcular el ndice de amortiguamiento crtico del sistema a partir de la relacin de amortiguamiento.
ndice de amortiguamiento =c/cc cc = 2mn = 2(W/g) (2piNCR /60) = 2(1000/386.1)(2pi3580/60) = 1939 lbs.seg/pulg.
c/ cc = 200/1939 = 0.10 (2 cojinetes)
Si la turbina opera a 4,200 RPM, la relacin de frecuencia ser de 4,200/3,580 = 1.17. Se puede usar la relacin de frecuencia y un factor de amortiguamiento de 0.10, la relacin de vibracin a excitacin obtenida de la Figura 10b: x/e = 3.13, el pico de vibracin es 3.13 veces la excentricidad de la masa. La excentricidad para una vibracin medida de 3 mils pico-pico (1.5 mils pico), se calcula.
x/e = 3.13 e = x/3.13 e = 0.0015 pulg/3.13 = 0.000479 pulgs =479 -pulg
-
18
Tambin se puede calcular la fuerza sobre el rotor debido al desbalance de masas. F = m e 2
F = (1,000/386.1) (0.000479 pulg) [2pi4,200/60]2 = 240 lbs
La fuerza es casi un cuarto del peso del rotor y sera considerada excesiva.
Figura 11. Respuesta Modal de Mquinas Rotativas,
La Figura 12 y la Figura 13, son modelos de sistemas vibratorios simples un disco montado en un eje y un motor elctrico montado sobre una plancha aislada. Ellos muestran la aplicacin de sistemas simples de masa - resorte a sistemas fsicos reales. Tambin se pueden representar muchas otras configuraciones de masas y resortes. El sistema masa-resorte tiene una frecuencia natural de:
fn = pi21
m
k
k = rigidez del sistema, lbs/pulg. m = W/g = (v)() m = masa del sistema (volumen del disco multiplicado por la densidad del material) (lbs-
seg2/pulg) g = constante gravitacional 386.1 pulg/seg2 v = volumen, pulg3 = densidad, lbs - seg2 /pulg4 c = amortiguacin, lbs seg / pulg cc = 2mn = amortiguamiento crtico (cantidad mxima de amortiguamiento en un sistema
para evitar la vibracin).
-
19
Figura 12. Sistema Rotor-Cojinete
Figura 13. Motor Elctrico-Plancha de aislamiento Figura 14. Giro Sincrnico =
GIRO E INESTABILIDADES EN MQUINAS El whirling (giro) puede ser sincrnico o
asincrnico. La frecuencia del whirling (giro) sincrnico se presenta a la velocidad del rotor. Un ejemplo del whirling sincrnico es la respuesta a la excitacin que aparece una vez por revolucin, como en el desbalance de masas (Figura 14). La rbita elptica es causada por la desigualdad en la rigidez de los apoyos del rotor. La Figura 15 es un ejemplo de excitacin asincrnico.
Las Inestabilidades y las vibraciones autoexcitadas son comunes en sistemas de mquinas y aparecen cuando un rotor gira a
Figura 15. Giro No Sincrnico
-
20
una frecuencia asincrnica en o cerca de una o ms de sus frecuencias naturales. El rotor absorbe energa de su movimiento rotacional y de sus apoyos, girando hasta llegar a tener amplitudes destructivas. La vibracin autoexcitada es potencialmente ms destructiva que la vibracin debida al desbalance de masas, siempre induce esfuerzos alternantes en el rotor que pueden derivar en fallas por fatiga o en fracturas catastrficas. El desbalance de masas induce pequeas variaciones de esfuerzo a la velocidad del rotor.
La inestabilidad encontrada ms frecuentemente es el llamado latigazo (whip). En alguna velocidad rotacional cercana a una frecuencia natural, una fuerza tangencial normal a la deflexin radial supera a las fuerzas de amortiguamiento estabilizadoras externas que generalmente estn presentes e induce un movimiento de giro (whirling) de amplitud creciente (Figura 16). El movimiento, o bien es limitado por la falta de linealidad que es la que finalmente limita la deflexin (llamado ciclo lmite) o contina creciendo. Ejemplos de tales inestabilidades incluyen; el giro (whirling) histersico, el fluido atrapado en el rotor, el latigazo (whip) por friccin seca, los efectos aerodinmicos por la luz en las puntas de los alabes y el ltigo (whip) del fluido en el cojinete. La fuerza desestabilizante en estos sistemas es la energa ya sea de friccin o de disipacin de fluido. Otra inestabilidad, la excitacin paramtrica, es inducida por la variacin peridica de parmetros tales como la rigidez, velocidad, torque e inercia.
Cuando un sistema tiene un comportamiento no-lineal, los compo-nentes rotativos de las mquinas pueden causar excitaciones a frecuencias que son mltiplos de la velocidad del rotor. Los modos pueden ser excitados por frecuencias diferentes a la velocidad de operacin. Si la frecuencia de excitacin de un rotor inducido, corresponde a la frecuencia de cualquier modo vibratorio, existir una condicin especial de resonancia llamada velocidad crtica (ver captulo para informacin adicional sobre velocidades crticas).
Figura 16. Latigazo No Sincrnico
-
21
RESUMEN Las excitaciones (pulsos y fuerzas vibratorias) causadas por defectos de las mquinas,
tolerancias de instalacin, diseo de la mquina, variables del proceso y control de calidad durante la fabricacin generan vibraciones en mquinas. La frecuencia de la vibracin es igual a la de la excitacin, a sus mltiplos o a sus frecuencias naturales. Las amplitudes de vibracin dependen de las caractersticas de la mquina. La vibracin siempre se retrasa con respecto a la excitacin. Las frecuencias naturales del sistema de una mquina son propiedades nicas que dependen de la masa y de la rigidez de un rotor y de sus cojinetes, pedestales, carcasas, cimientos y tuberas. Las formas modales son formas relativas adoptadas por los componentes de la mquina cuando vibran a una frecuencia natural. Cuando la frecuencia de excitacin es igual a la frecuencia natural de un sistema, la vibracin es amplificada y la condicin es llamada resonancia. Una velocidad crtica es una resonancia inducida por un eje rotativo.
La inestabilidad aparece cuando la vibracin no es delimitada. Una mquina ser destruida a menos que opere en un ciclo limitado, en el cual las restricciones de no-linealidad limitan el movimiento de la mquina. La excitacin es controlada por el amortiguamiento y por la masa del sistema y est en equilibrio con la vibracin en un modo lineal. Para controlar las inestabilidades, es necesario un material con comportamiento no lineal.






![Vibraciones unidad 1 b [sistema de resortes]](https://static.fdocumento.com/doc/165x107/58a1503e1a28abbe3c8b50e3/vibraciones-unidad-1-b-sistema-de-resortes.jpg)

![Vibraciones unidad 1 c [autoguardado]](https://static.fdocumento.com/doc/165x107/5884a7b61a28ab76798b50bd/vibraciones-unidad-1-c-autoguardado.jpg)





