
raymundotovarcamacho.files.wordpress.com · Web viewTorque de control. El método más común de...
161
MAQUINAS ELECTRICAS ROTATIVAS Introducción Se ha dicho que si los antiguos Romanos, con su civilización y conocimiento avanzados de las ciencias, hubieran podido desarrollar el motor de vapor, el curso de la historia habría sido diferente. El desarrollo del motor eléctrico en épocas modernas ha indicado la verdad en esta teoría. El desarrollo del motor eléctrico nos ha dado los medios más eficientes y más eficaces para realizar un trabajo. Con el motor eléctrico hemos podido reducir notablemente el trabajo que realiza el hombre para su supervivencia, además, hemos podido construir una civilización que ahora está alcanzando las estrellas. El motor eléctrico es un dispositivo simple en principio, convierte energía eléctrica en energía mecánica. Al paso de los años, los motores eléctricos han cambiado substancialmente en diseño, no obstante los principios básicos de operación han seguido siendo iguales. En esta sección, mencionaremos los principios básicos del motor, los fenómenos del magnetismo, operación actual y básica de los motores de CA. Electricidad Categoría de fenómenos físicos originados por la existencia de cargas eléctricas y por la interacción de las mismas. Cuando una carga eléctrica se encuentra estacionaria, o estática, produce fuerzas eléctricas sobre las otras cargas situadas en su misma región del espacio; cuando está en movimiento, produce además efectos magnéticos. Los efectos eléctricos y magnéticos dependen de la posición y movimiento relativos de las partículas con carga. En lo que respecta a los efectos eléctricos, estas partículas pueden ser neutras, positivas o negativas. La electricidad se ocupa de las partículas cargadas positivamente, como los protones, que se repelen mutuamente, y de las partículas cargadas negativamente, como los electrones, que también se repelen mutuamente. En cambio, las partículas negativas y positivas se atraen entre sí. Este comportamiento puede resumirse diciendo que las cargas del mismo signo se repelen y las cargas de distinto signo se atraen. 1
Transcript of raymundotovarcamacho.files.wordpress.com · Web viewTorque de control. El método más común de...

MAQUINAS ELECTRICAS ROTATIVAS
Introducción
Se ha dicho que si los antiguos Romanos, con su civilización y conocimiento avanzados de las ciencias, hubieran podido desarrollar el motor de vapor, el curso de la historia habría sido diferente. El desarrollo del motor eléctrico en épocas modernas ha indicado la verdad en esta teoría. El desarrollo del motor eléctrico nos ha dado los medios más eficientes y más eficaces para realizar un trabajo. Con el motor eléctrico hemos podido reducir notablemente el trabajo que realiza el hombre para su supervivencia, además, hemos podido construir una civilización que ahora está alcanzando las estrellas. El motor eléctrico es un dispositivo simple en principio, convierte energía eléctrica en energía mecánica. Al paso de los años, los motores eléctricos han cambiado substancialmente en diseño, no obstante los principios básicos de operación han seguido siendo iguales. En esta sección, mencionaremos los principios básicos del motor, los fenómenos del magnetismo, operación actual y básica de los motores de CA.
Electricidad
Categoría de fenómenos físicos originados por la existencia de cargas eléctricas y por la interacción de las mismas. Cuando una carga eléctrica se encuentra estacionaria, o estática, produce fuerzas eléctricas sobre las otras cargas situadas en su misma región del espacio; cuando está en movimiento, produce además efectos magnéticos. Los efectos eléctricos y magnéticos dependen de la posición y movimiento relativos de las partículas con carga. En lo que respecta a los efectos eléctricos, estas partículas pueden ser neutras, positivas o negativas. La electricidad se ocupa de las partículas cargadas positivamente, como los protones, que se repelen mutuamente, y de las partículas cargadas negativamente, como los electrones, que también se repelen mutuamente. En cambio, las partículas negativas y positivas se atraen entre sí. Este comportamiento puede resumirse diciendo que las cargas del mismo signo se repelen y las cargas de distinto signo se atraen.
1
Unidades de Electricidad
a) Corriente: Es el flujo de electrones en un conductor eléctrico. Su símbolo es la letra I y se expresa en Amperes.
b) Voltaje ó Tensión: Es una diferencia de potencial ó fuerza electromotriz. Su símbolo es la letra V ó E y se expresa en Volts.
c) Resistencia: Es el oposición al flujo de la corriente eléctrica. Su símbolo es la letra R ó Ω y se expresa en Ohms.
d) Potencia: Es el trabajo realizado en un circuito eléctrico. Su símbolo es la letra P y se expresa en Watts.
Ley de Ohm
Ohm encontró que si la resistencia en un circuito se mantenía constante y aumentaba la tensión de la fuente, se produciría un aumento correspondiente en la corriente. Asimismo, una disminución en tensión produciría una disminución en la corriente. Expresado de otra manera, Ohm observó que en un circuito de c-c, la corriente es directamente proporcional a la tensión. También descubrió que si la tensión de la fuente se mantenía constante, en tanto que la resistencia del circuito aumentaba, la corriente disminuía. En forma similar, una disminución en la resistencia tendría por resultado un aumento en la corriente. En otras palabras, la corriente es inversamente proporcional a la resistencia.Esta relación entre corriente, tensión y resistencia en un circuito de c-c, se conoce como ley de Ohm y se puede resumir como sigue: en un circuito de c-c, la corriente es directamente proporcional a la tensión e inversamente proporcional a la resistencia. Puesto que la tensión produce el flujo de corriente en un circuito eléctrico y la resistencia se opone al flujo de ella, existe una relación entre tensión, corriente y resistencia.La ley de Ohm es un enunciado de proporción y no una ecuación matemática. Sin embargo, si se da la corriente en Ampers, la tensión en Volts y la resistencia en Ohms, entonces la ley de Ohm se puede expresar según la ecuación
Esto es mencionado así:
La corriente eléctrica en un circuito es directamente proporcional al voltaje e inversamente proporcional a la resistencia.
a) Si se aumenta E, aumenta Ib) Si se reduce E, reducirá I
c) Si se aumenta R, disminuirá I
d) Si se reduce R, aumentará I
Ecuaciones: I = V / R R = V / I V = I x R
2
Potencia: La potencia empleada en un circuito indica la cantidad de trabajo efectuado en ese circuito.
P = V x I
PRINCIPIOS ELECTRODINÁMICOS
Ley de Faraday
En 1831 descubrió el fenómeno de la inducción electromagnética. El observó que la variación que la variación del flujo magnético a través de la superficie encerrada por una espira cerrada, conduce a la aparición en ella de una corriente eléctrica. Los experimentos de Faraday demostraron que la corriente de inducción (o la fem de inducción) no depende en absoluto de la razón por la cual varía el flujo del campo magnético.
Una fuerza electromotriz es inducida en un medio cuando se cambia el enlazamiento de flujo magnético, asociado con el medio; y el medio es un conductor de electricidad, formando una trayectoria cerrada, una corriente fluye en el conductor debido a la fuerza electromotriz inducida, la magnitud de la FEM inducida es proporcional a la rapidez de cambio de tiempo.
En otras palabras, la ley de Faraday dice que un campo magnético variable en el tiempo induce un campo eléctrico no conservativo capaz de provocar el flujo de corriente en un circuito cerrado afectado por el mismo.
Por lo tanto “La fuerza electromotriz inducida en un circuito formado por un conductor o una bobina es directamente proporcional al número de líneas de fuerza magnética cortadas en un segundo”.
Se puede variar el campo magnético exterior, manteniendo la espira inmóvil (desplazando la fuente del campo magnético) o se puede mantener el campo magnético constante y hacer desplazar la espira o deformarla. En cualquiera de los casos la fem de inducción resulta proporcional a la velocidad de variación del campo magnético (precisamente esta es la Ley de Faraday), y la dirección de la corriente se determina con la Ley de Lenz. Lo anterior se expresa con:
La fuerza electromotriz (FEM) inducida en un conductor moviéndose a través de un campo magnético será proporcional cambio de la corriente:
E = - d Q / d t
Para que la corriente pueda ser obtenida de un circuito eléctrico, una fuerza electromotriz (el voltaje) debe estar establecida y mantenida entre los dos fines del circuito. Esta fuerza
3

electromotriz puede estar establecida en diferentes formas, una del cual está por medio de un generador electromagnético.
Michael Faraday descubrió que un potencial eléctrico puede estar establecido entre los fines de un conductor en las siguientes tres formas:
Por un conductor moviéndose o interceptando un campo magnético estacionario. (Generador de CD).
Por un campo magnético en movimiento interceptando a un conductor estacionario. (Generador de CA).
Por un cambio en el número de líneas magnéticas incluidas por un lazo estacionario o una bobina. (El transformador).
Las condiciones de la ley de Faraday establecen que la FEM inducida entre los fines de un lazo o una bobina es proporcional a la tasa de cambio de flujo magnético adjunto a la bobina; O la FEM inducida entre los fines de un conductor de la barra es proporcional a la tasa de tiempo en la cual el flujo magnético está cortado por el conductor”. Esta ley enfatiza la tasa de cambio del campo magnético.
Ley de Lenz
Siempre que se mueve a un conductor dentro de un campo magnético, la corriente inducida en el conductor establece un campo alrededor del mismo; dicho campo tiende a mover al conductor contra la dirección inicial del movimiento. Dicho de otra manera, la ley de Lenz establece que se produce una acción motor como resultado del funcionamiento normal del generador y viceversa. En todos los casos de inducción electromagnética, la tensión inducida es de dirección tal que las corrientes que genera se oponen a la causa que las origina.
Si una corriente inducida fluye, su dirección es siempre de tal forma que se opone al cambio del flujo que la produjo. Esto nos da el signo negativo en la ecuación de Faraday.
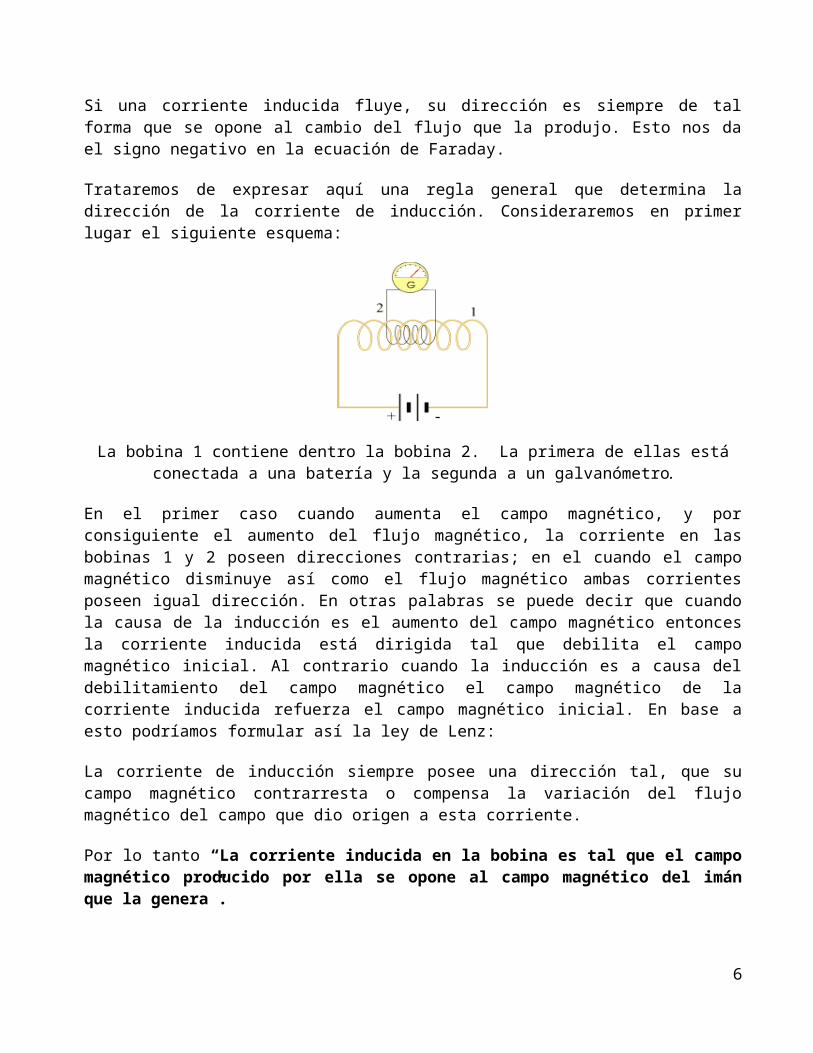
Trataremos de expresar aquí una regla general que determina la dirección de la corriente de inducción. Consideraremos en primer lugar el siguiente esquema:
4
La bobina 1 contiene dentro la bobina 2. La primera de ellas está conectada a una batería y la segunda a un galvanómetro.
En el primer caso cuando aumenta el campo magnético, y por consiguiente el aumento del flujo magnético, la corriente en las bobinas 1 y 2 poseen direcciones contrarias; en el cuando el campo magnético disminuye así como el flujo magnético ambas corrientes poseen igual dirección. En otras palabras se puede decir que cuando la causa de la inducción es el aumento del campo magnético entonces la corriente inducida está dirigida tal que debilita el campo magnético inicial. Al contrario cuando la inducción es a causa del debilitamiento del campo magnético el campo magnético de la corriente inducida refuerza el campo magnético inicial. En base a esto podríamos formular así la ley de Lenz:
La corriente de inducción siempre posee una dirección tal, que su campo magnético contrarresta o compensa la variación del flujo magnético del campo que dio origen a esta corriente.
Por lo tanto “La corriente inducida en la bobina es tal que el campo magnético producido por ella se opone al campo magnético del imán que la genera”.
Esta ley sin excepción en todos los casos de inducción. A la derecha se puede apreciar el caso en que el imán se acerca a una espira (podría ser la espira al imán) y el caso en que el imán se aleja de la espira (o la espira del imán).
Nótese que cuando en las espiras aparece una corriente inducida podemos atribuirles un norte y un sur como a cualquier imán. Cuando se acerca el polo norte del imán, este se ve enfrentado al norte de la espira. Cuando se aleja tenemos arriba de la espira el polo sur. Como sabemos en el primer caso hay repulsión y en el segundo caso atracción. De esta manera podemos enunciar la ley de Lenz en su forma original.
La corriente de inducción siempre tiene tal dirección que su interacción con el campo magnético primario se opone al movimiento origen de la inducción.
Esta ley está obviamente de acuerdo con la conservación de la energía. Supongamos que las direcciones de las corrientes fueran las contrarias a las que se muestran en las figuras. Entonces en el primer caso al acercarse el imán y ser sur el polo superior habría una atracción y entonces el imán sin ayuda se acercaría aceleradamente hacia la espira. De esta
5
manera sin necesidad de un trabajo externo obtendríamos una aceleración continua del imán y una corriente cada vez mayor en la espira capaz de hacer un trabajo.
Magnetismo
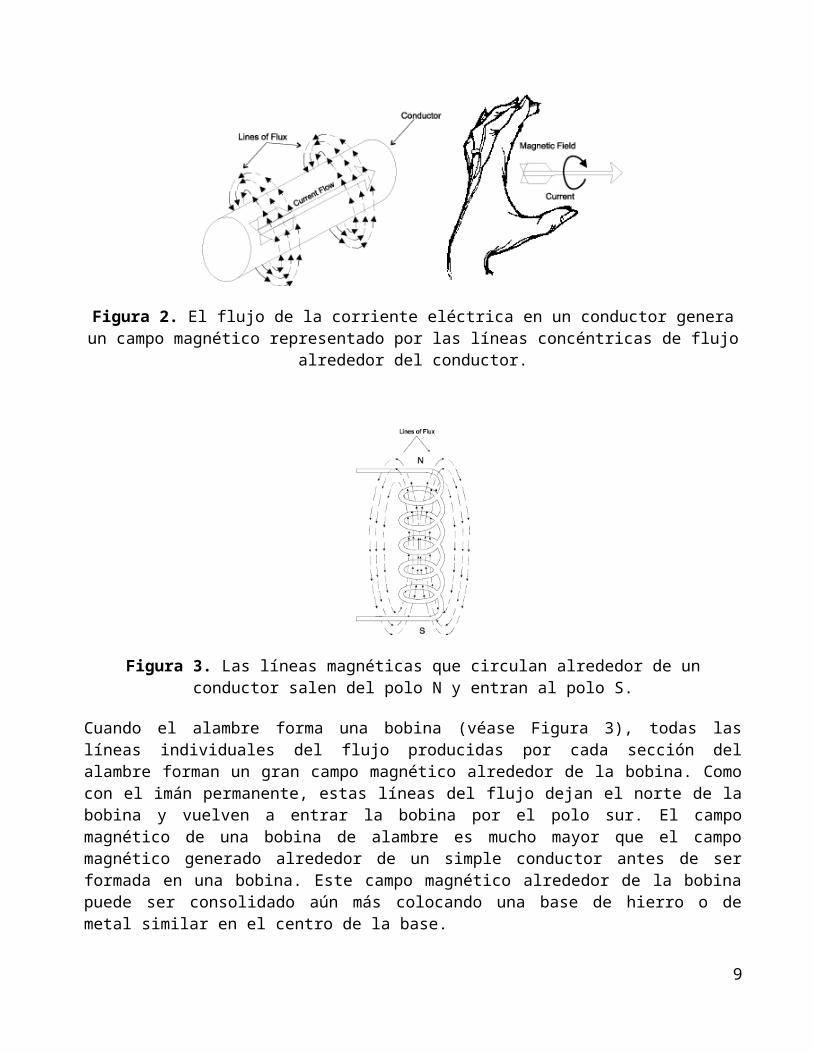
Antes de describir los principios básicos del motor, daremos una revisión del magnetismo. Todos sabemos que un imán permanente atraerá objetos de metal cuando el objeto está cerca o en de contacto con dicho el imán. El imán puede hacer esta función permanente debido a su fuerza magnética inherente, referida como "campo magnético". En la Figura 1, el campo magnético de dos imanes permanentes es representado por las "líneas del flujo". Estas líneas del flujo nos ayudan a visualizar el campo magnético de cualquier imán aunque representan solamente fenómenos invisibles. El número de líneas del flujo varía a partir de un campo magnético a otro. Cuanto más fuerte es el campo magnético, mayor es el número de las líneas del flujo que se dibujan para representar el campo magnético. Las líneas del flujo se dibujan con una dirección indicada puesto que debemos visualizar estas líneas y el campo magnético que representan movimientos que van del polo N al polo S, según lo demostrado en la Figura 1. Un campo magnético similar, se produce alrededor de un conductor eléctrico, cuando circula corriente eléctrica a través de él, según lo demostrado en la Figura 2-a. Estas líneas del flujo definen el campo magnético y están en la forma de círculos concéntricos alrededor del alambre. La vieja "regla de la mano izquierda" véase la Figura 2-b. indica que sí usted señala con el pulgar de su mano izquierda la dirección de la corriente, sus dedos señalarán la dirección que presenta el campo magnético.
6

Figura 1. Las líneas del flujo de un campo magnético viajan del polo N al polo S.
Figura 2. El flujo de la corriente eléctrica en un conductor genera un campo magnético representado por las líneas concéntricas de flujo alrededor del conductor.
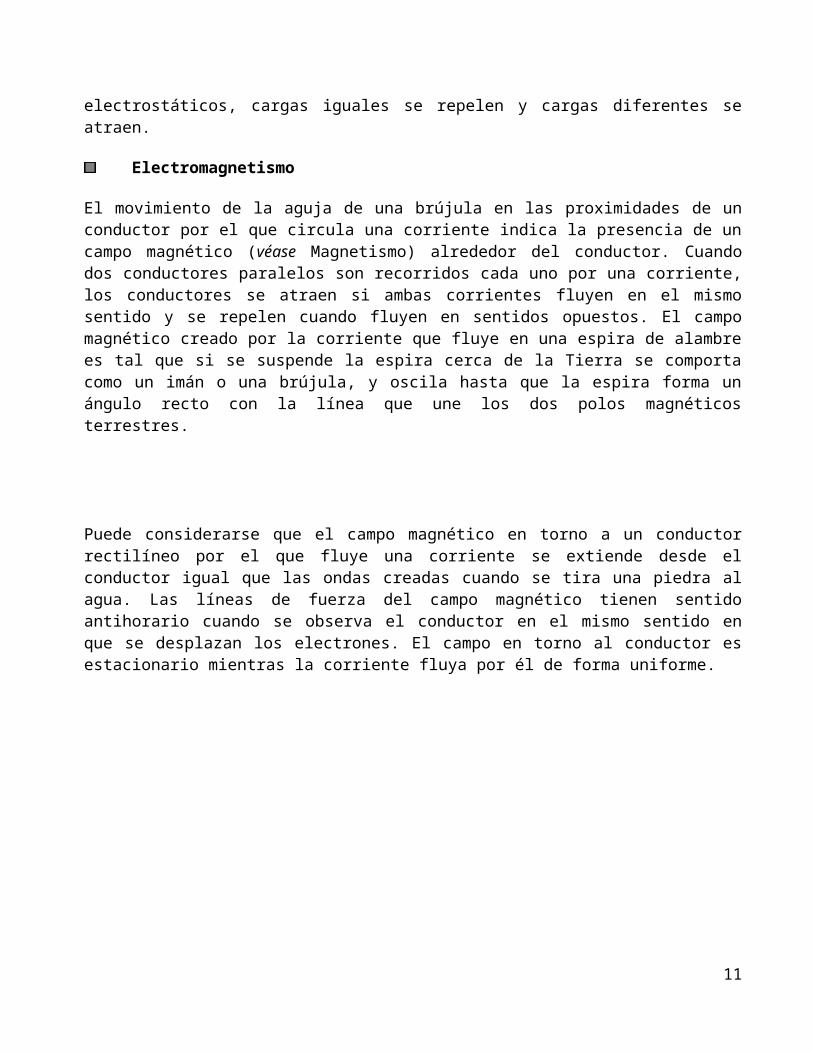
Figura 3. Las líneas magnéticas que circulan alrededor de un conductor salen del polo N y entran al polo S.
Cuando el alambre forma una bobina (véase Figura 3), todas las líneas individuales del flujo producidas por cada sección del alambre forman un gran campo magnético alrededor de la bobina. Como con el imán permanente, estas líneas del flujo dejan el norte de la bobina y vuelven a entrar la bobina por el polo sur. El campo magnético de una bobina de alambre es mucho mayor que el campo magnético generado alrededor de un simple conductor antes de ser formada en una bobina. Este campo magnético alrededor de la bobina puede ser consolidado aún más colocando una base de hierro o de metal similar en el centro de la base.
7

La base del metal presenta menos resistencia a las líneas del flujo que al aire, de tal modo la fuerza del campo puede aumentar. (así es como se realiza la bobina del estator, bobina de alambre con base de acero). La ventaja de un campo magnético que sea producido por una bobina, es que cuando se invierte la corriente, los postes cambian de dirección debido al cambio de dirección flujo magnético (véase Figura 4). Si este fenómeno magnético no se presentara, el motor de CA no existiría.
Figura 4. Los polos de una bobina electromagnética cambian cuando la dirección del flujo actual cambia.
Campo Magnético
El campo magnético esta formado por líneas de fuerza que se extienden en el espacio partiendo del polo N y dirigiéndose al polo S. Estas líneas no se cruzan y se van apartando al alejarse del imán. Cuanto más cercanas sean las líneas de fuerza y sea mayor el número de ellas, más intenso será el campo magnético; en resumido un campo magnético es el conjunto de líneas de fuerza magnéticas.
Para efectos de atracción y repulsión, polos opuestos se atraen y polos iguales se repelen. Esto es ocurre igual que con los campos electrostáticos, cargas iguales se repelen y cargas diferentes se atraen.
Electromagnetismo
El movimiento de la aguja de una brújula en las proximidades de un conductor por el que circula una corriente indica la presencia de un campo magnético (véase Magnetismo) alrededor del conductor. Cuando dos conductores paralelos son recorridos cada uno por una corriente, los conductores se atraen si ambas corrientes fluyen en el mismo sentido y se repelen cuando fluyen en sentidos opuestos. El campo magnético creado por la corriente
8
que fluye en una espira de alambre es tal que si se suspende la espira cerca de la Tierra se comporta como un imán o una brújula, y oscila hasta que la espira forma un ángulo recto con la línea que une los dos polos magnéticos terrestres.
Puede considerarse que el campo magnético en torno a un conductor rectilíneo por el que fluye una corriente se extiende desde el conductor igual que las ondas creadas cuando se tira una piedra al agua. Las líneas de fuerza del campo magnético tienen sentido antihorario cuando se observa el conductor en el mismo sentido en que se desplazan los electrones. El campo en torno al conductor es estacionario mientras la corriente fluya por él de forma uniforme.
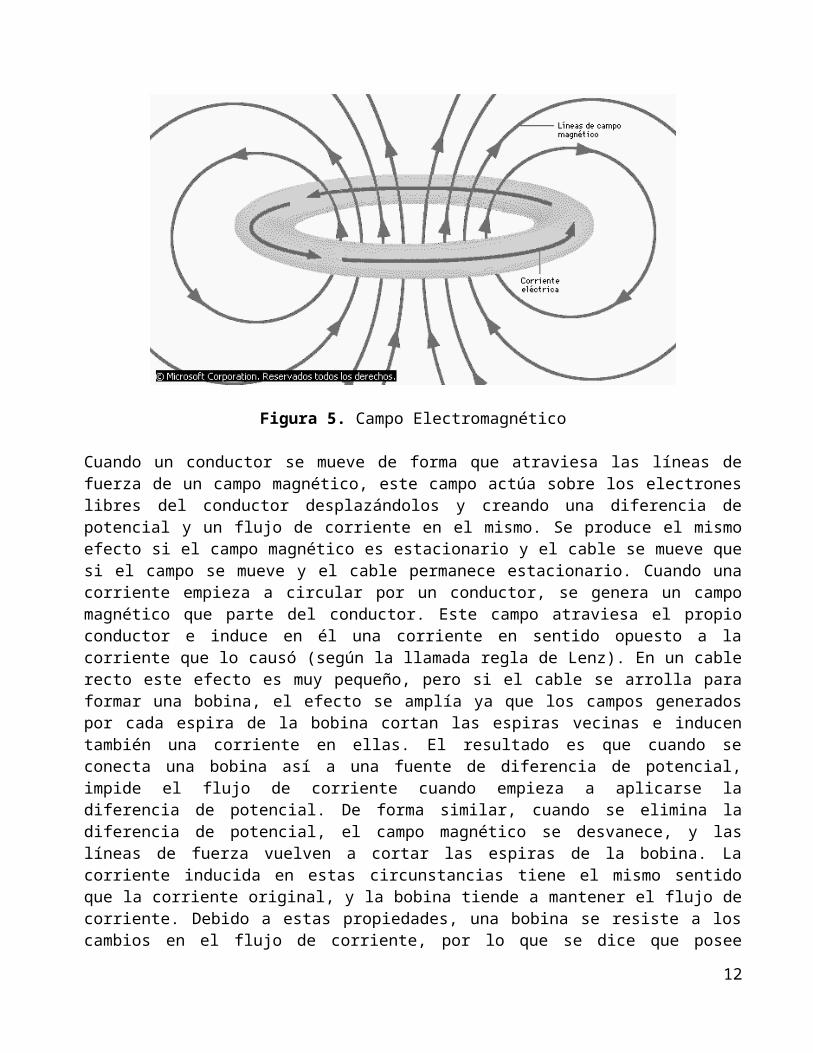
Figura 5. Campo Electromagnético
Cuando un conductor se mueve de forma que atraviesa las líneas de fuerza de un campo magnético, este campo actúa sobre los electrones libres del conductor desplazándolos y creando una diferencia de potencial y un flujo de corriente en el mismo. Se produce el mismo efecto si el campo magnético es estacionario y el cable se mueve que si el campo se mueve y el cable permanece estacionario. Cuando una corriente empieza a circular por un conductor, se genera un campo magnético que parte del conductor. Este campo atraviesa el propio conductor e induce en él una corriente en sentido opuesto a la corriente que lo causó (según la llamada regla de Lenz). En un cable recto este efecto es muy pequeño, pero si el cable se arrolla para formar una bobina, el efecto se amplía ya que los campos generados por cada espira de la bobina cortan las espiras vecinas e inducen también una corriente en ellas. El resultado es que cuando se conecta una bobina así a una fuente de diferencia de potencial, impide el flujo de corriente cuando empieza a aplicarse la diferencia de potencial. De forma similar, cuando se elimina la diferencia de potencial, el campo magnético se
9

desvanece, y las líneas de fuerza vuelven a cortar las espiras de la bobina. La corriente inducida en estas circunstancias tiene el mismo sentido que la corriente original, y la bobina tiende a mantener el flujo de corriente. Debido a estas propiedades, una bobina se resiste a los cambios en el flujo de corriente, por lo que se dice que posee inercia eléctrica o autoinducción. Esta inercia tiene poca importancia en circuitos de corriente continua, ya que no se observa cuando la corriente fluye de forma continuada, pero es muy importante en los circuitos de corriente alterna.
Electroimán
Dispositivo que consiste en un solenoide (una bobina cilíndrica de alambre recubierta de una capa aislante y arrollado en forma de espiral), en cuyo interior se coloca un núcleo de hierro. Si una corriente eléctrica recorre la bobina, se crea un fuerte campo magnético en su interior, paralelo a su eje. Al colocar el núcleo de hierro en este campo los dominios microscópicos que forman las partículas de hierro, que pueden considerarse pequeños imanes permanentes, se alinean en la dirección del campo, aumentando de forma notable la fuerza del campo magnético generado por el solenoide. La imantación del núcleo alcanza la saturación cuando todos los dominios están alineados, por lo que el aumento de la corriente tiene poco efecto sobre el campo magnético. Si se interrumpe la corriente, los dominios se redistribuyen y sólo se mantiene un débil magnetismo residual.
Figura 6. Espiras y Bobina
10
Motor Eléctrico
El motor eléctrico es una máquina eléctrica rotativa que puede convertir la energía eléctrica a energía mecánica como movimiento rotatorio, con objeto de que efectúe un trabajo útil. Utilizando el electromagnetismo.
Figura 7. Vista Interna de Motor de Inducción
Principio de Funcionamiento
El motor eléctrico funciona a base de la interacción de dos campos magnéticos: uno se produce alrededor de un conductor que lleva corriente y el otro es un campo magnético fijo; esto es induciendo una corriente o energizando un electroimán en la armadura. Cuando en el estator fluyen las líneas de flujo magnéticas y a su vez al energizar la armadura, esta también producirá un campo magnético alrededor del conductor. Al interactuarse estos dos campos magnéticos se producirá así el giro.
11
El motor trabaja debido al efecto que tiene un campo magnético sobre un conductor con corriente eléctrica. La corriente que fluye en el conductor produce un campo magnético propio, alrededor del conductor. Este campo distorsionará las líneas de flujo que existen entre dos polos magnéticos. En la región donde las líneas de flujo tienen la misma dirección que las líneas de fuerza, las primeras tienden a desplazarse hacia un lado del conductor. Pero las líneas distorsionadas de flujo tienden a enderezarse, de modo que ejercen una fuerza de repulsión sobre el conductor. Por lo tanto, en la región donde las líneas de flujo son más débiles, empujan el conductor hacia fuera del campo. Este principio se basa el funcionamiento del motor eléctrico.
Propulsión Magnética del Motor
El principio de operación de los motores se puede demostrar fácilmente usando dos electroimanes y un imán permanente. La corriente se pasa a través de la bobina No. 1 en dirección al polo Norte establecido y a través de la bobina No. 2 en dirección al polo Sur. Un imán permanente con un polo Norte y Sur es la pieza móvil de este motor simple. En la figura 8-a el polo Norte del imán permanente está enfrente del polo Norte del electroimán. De manera semejante, los polos Sur están uno enfrente del otro. Como los polos magnéticos iguales se rechazan, empieza a girar el imán permanente. Cuando la fuerza de atracción entre los polos opuestos llega a ser lo suficientemente fuerte, el imán gira permanente. El imán rotativo continúa cambiando de dirección hasta que los polos opuestos se alinean. En este punto el rotor normalmente se detendría por la atracción entre los polos diferentes (Figura 8-b).
Figura 8. Propulsión magnética del motor
Sí la dirección de corrientes en las bobinas electromagnéticas fue invertida repentinamente, por consiguiente se invierte la polaridad de las dos bobinas, entonces, los polos otra vez sería opuestos y se repelerían entre ellos (Figura 8-c). Por lo tanto, el imán permanente continuaría rotando. Si la dirección actual en las bobinas electromagnéticas fuera cambiada todo el tiempo, el imán daría vuelta 180 grados a medio camino, entonces el imán continuaría rotando. Este dispositivo sencillo es un motor en su forma más simple. Un motor real es más complejo, sin embargo, el principio es igual.
12

Corriente Alterna (CA) y Corriente Continua (CD)
¿Cómo es que cuando se invierte la corriente en la bobina puede cambiar la polaridad de las mismas? Como usted sabe, la diferencia entre la Corriente Directa (CD) y la Corriente Alterna (CA) es que con la CD la corriente fluye solamente en una dirección, mientras que con la CA la dirección del flujo de corriente actual cambia periódicamente de dirección. En el caso de la CA común que se utiliza a través de la mayoría de los Estados Unidos, el flujo actual cambia de dirección 120 veces por segundo. Esta corriente se refiere a la “CA de 60 o ciclos" o "CA de 60 Hertz" en honor del Sr. Hertz que fue la primera persona que concibió el concepto de la corriente de la CA. Otra característica del flujo de corriente actual es que puede variar en cantidad, es decir, podemos tener un flujo de 5, 10 ó 100 Amperes, por ejemplo. Con la CD absoluta, esto significa que el flujo actual sería de 5, 10 ó 100 Amperes continuos (véase Figura 9).
La corriente eléctrica solo fluye cuando existe una diferencia de potencial, si la polaridad de la diferencia de potencial no varía, la corriente siempre fluirá en una dirección y se llama C.C. Existe un tipo de corriente eléctrica que no siempre fluye en la misma dirección, sino que alterna y fluye primero hacia una dirección y luego se invierte hacia otra. A esta se le llama C.A.
El objeto de cualquier fuente de potencia es producir una tensión ó diferencia de potencial entre sus terminales de salida y mantener esta tensión cuando el circuito se cierra y fluye corriente. En fuentes de potencia de C.D. la polaridad de la tensión de salida nunca cambia, una terminal siempre es positiva y otra siempre es negativa; por lo tanto la corriente siempre tiene la misma dirección. Por otra parte, las fuentes de C.A. cambian de polaridad constantemente, en determinado tiempo una terminal es negativa y otra es positiva, luego después se intercambian la polaridad, estas inversiones de polaridad son continuas y cada vez que suceden la corriente del circuito cambia de dirección, ya que debe fluir siempre de la terminal negativa hacia la terminal positiva. Las fuentes de energía de C.A. se les llama alternadores ó generadores y a los de C.D. se les llama baterías ó acumuladores.
Formas de onda de (CA) y (CD)
La forma de onda es la representación gráfica de la corriente ó tensión en un tiempo determinado. Una forma de onda muestra la magnitud y dirección de la corriente ó la tensión en cualquier instante.
13

La polaridad y magnitud de una corriente ó una tensión continua nunca cambia. Por lo tanto, la forma de onda será una línea recta.
Una corriente ó tensión alterna cambian tanto en magnitud como en polaridad. Esto puede apreciarse por la forma de la onda senoidal expresada en ciclos / segundos ó en Hertz.
Figura 9. Visualización de la CD
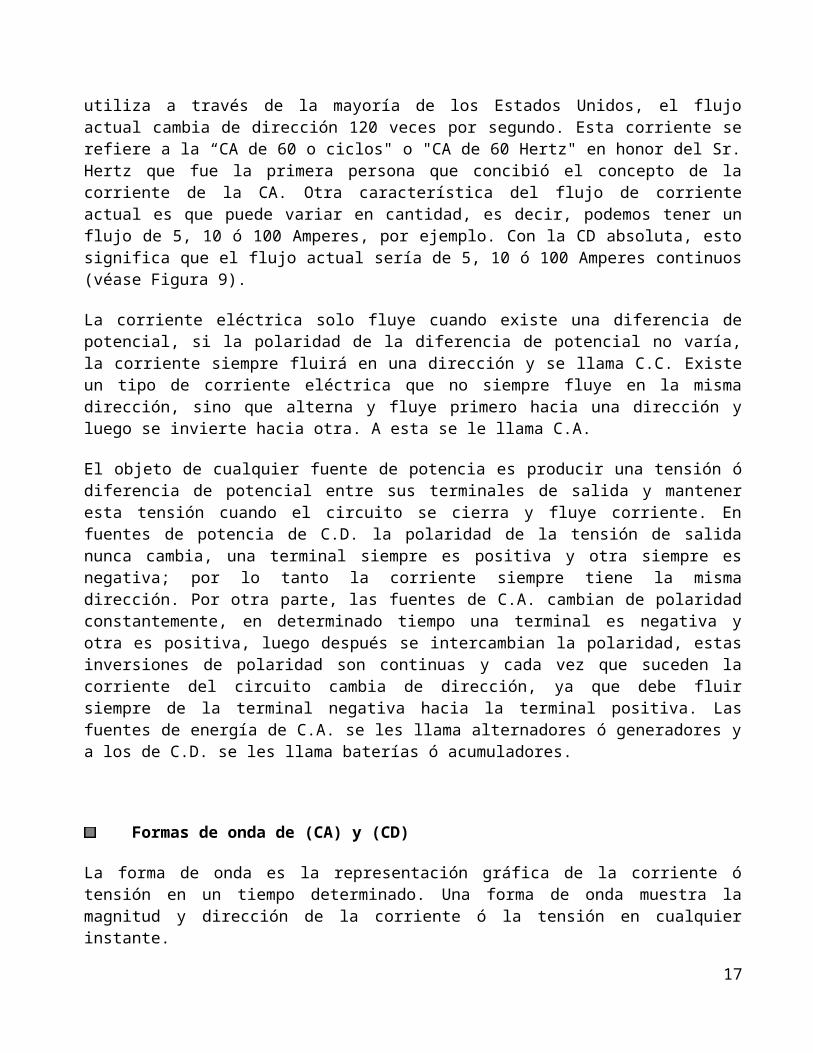
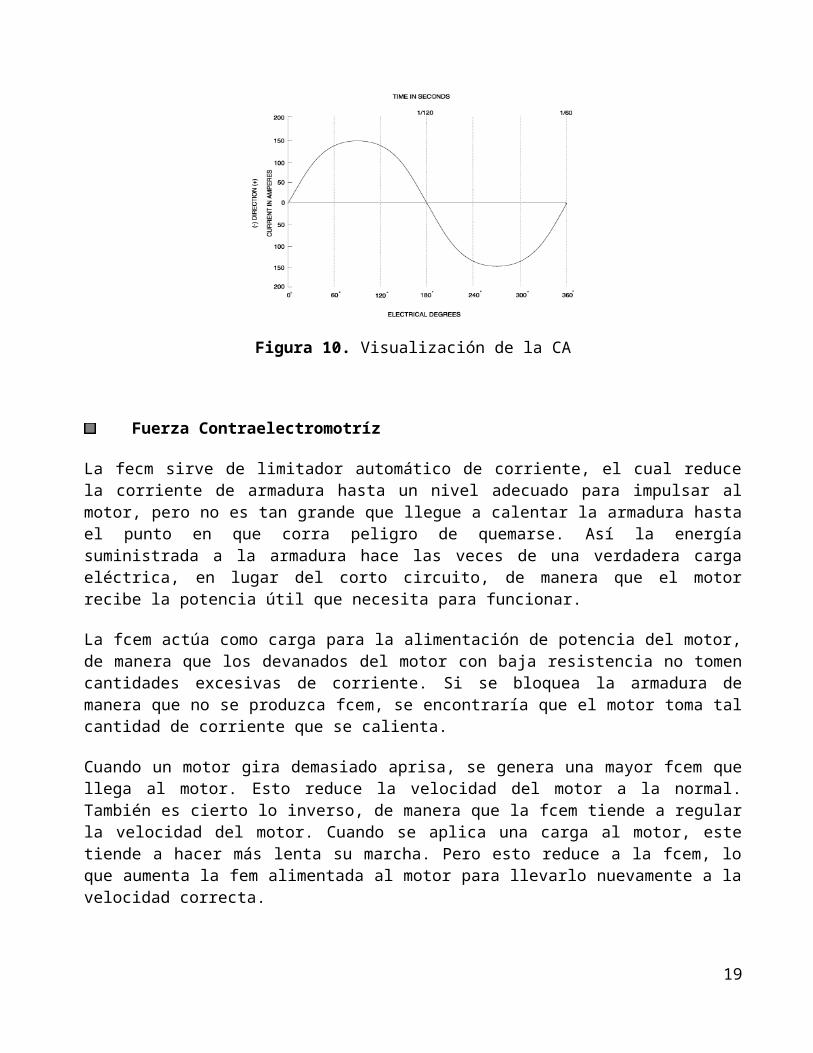
Con la CA es diferente. Como usted puede imagínese, sería bastante difícil que la corriente fluya de desde el punto de vista de 100 amperios en una dirección positiva e inmediatamente después esté fluyendo con dirección negativa de igual intensidad. En lugar de eso, como la corriente se alista para cambiar de direcciones, primero disminuye hasta que alcanza el flujo cero y después se acumula gradualmente en la otra dirección (véase Figura 10). Observe que el flujo actual máximo (los picos de la línea) en cada dirección es más que el valor especificado (100 Amperes). Por lo tanto, el valor especificado se da como valor promedio. Realmente se llama "raíz cuadrada media", pero no se preocupe por recordar esto ya que no es de importancia. Lo que es importante en nuestro estudio de motores, es darse cuenta de que la fuerza del campo magnético producido por una bobina electromagnética de CA, aumenta y disminuye con el incremento y disminución del flujo de corriente alterna.
14
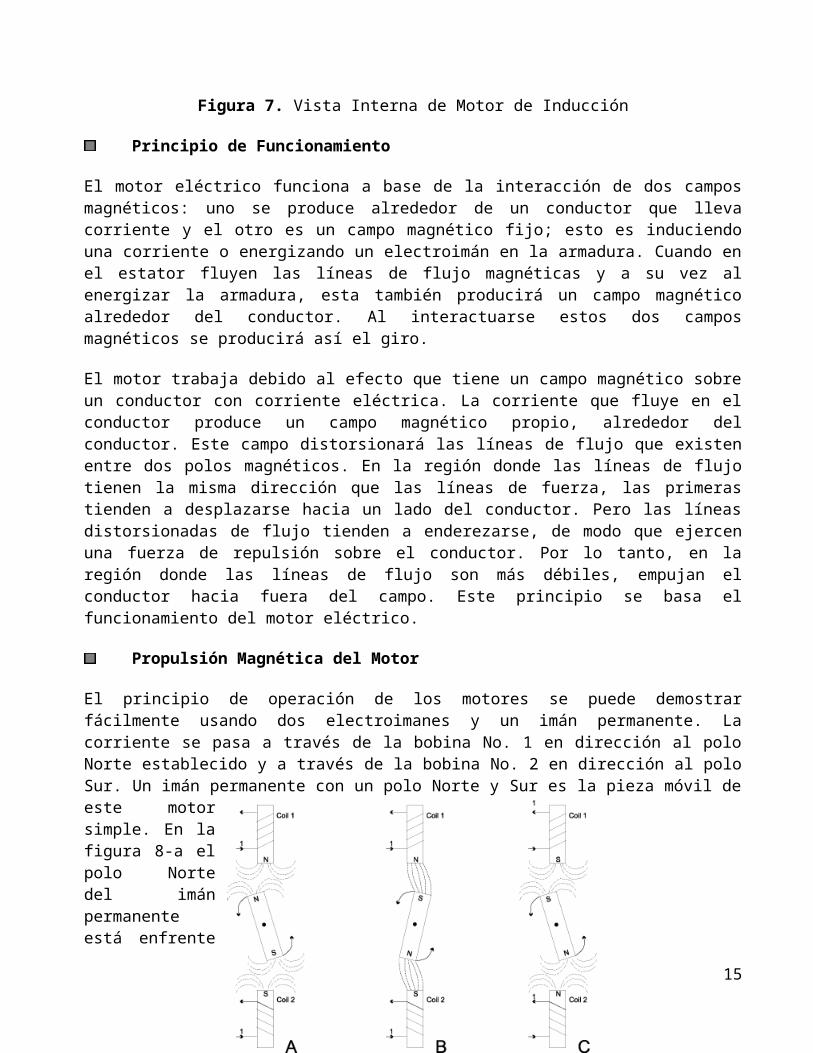
Figura 10. Visualización de la CA
Fuerza Contraelectromotríz
La fecm sirve de limitador automático de corriente, el cual reduce la corriente de armadura hasta un nivel adecuado para impulsar al motor, pero no es tan grande que llegue a calentar la armadura hasta el punto en que corra peligro de quemarse. Así la energía suministrada a la armadura hace las veces de una verdadera carga eléctrica, en lugar del corto circuito, de manera que el motor recibe la potencia útil que necesita para funcionar.
La fcem actúa como carga para la alimentación de potencia del motor, de manera que los devanados del motor con baja resistencia no tomen cantidades excesivas de corriente. Si se bloquea la armadura de manera que no se produzca fcem, se encontraría que el motor toma tal cantidad de corriente que se calienta.
Cuando un motor gira demasiado aprisa, se genera una mayor fcem que llega al motor. Esto reduce la velocidad del motor a la normal. También es cierto lo inverso, de manera que la fcem tiende a regular la velocidad del motor. Cuando se aplica una carga al motor, este tiende a hacer más lenta su marcha. Pero esto reduce a la fcem, lo que aumenta la fem alimentada al motor para llevarlo nuevamente a la velocidad correcta.
15
Figura 11. Efectos de la fcem
Construcción y Características del Motor
Estator de polos salientes: Consta de piezas polares de laminas de acero prensadas, donde sobresalen a la vista los polos, en los polos se hacen los devanados a su alrededor, Su función es crear el campo magnético fijo y hacer girar a la armadura.
Estator ranurado: Consta de ranuras laminadas de acero, las bobinas del devanado se alojan en las cavidades, todas las bobinas están aisladas individualmente, en este tipo de estator los polos magnéticos son indistinguibles, a menos de ubicarlo por medio del embobinado su función, es crear un campo magnético fijo y hacer girar a la armadura.
16
Rotor devanado: Un núcleo de armadura típico es un cilindro sólido que tiene ranuras y esta hecho de laminaciones prensadas de acero. Las ranuras sirven para alojar las espiras de alambre de cobre. El núcleo de armadura esta montado sobre el eje del motor, el cual es una barra de acero duro; la armadura ó rotor es el elemento rotatorio.
Devanados: Las bobinas van montadas sobre las ranuras o polos, son de alambre magneto de cobre que cuentan con doble capa de esmalte epóxico.
Aislamiento de devanados: puede ser papel pescado o papel Mylar, resistente al calor y a la humedad con buenas propiedades eléctricas y mecánicas.
Rotor jaula de ardilla: Consta de un núcleo de hierro laminado y rasurado longitudinalmente en toda su periferia. En estas ranuras se colocan conductores sólidos de cobre, aluminio, u otro material, en ambos extremos se colocan anillos de corto circuito soldados ó unidos a las barras, para formar una estructura sólida. Este rotor tiene devanados de aluminio inyectado a presión con aspas formadas sobre los anillos de corto circuito y es balanceado dinámicamente.
Conmutador: El conmutador esta formado de segmentos individuales de cobre, separados entre si y de una brida de sujeción que los mantiene dentro de una forma cilíndrica por medio de aislante de mica. Las puntas de la bobina de armadura se conectan al conmutador.
Escobillas ó Carbones: Las escobillas son de material de carbón suave que tiene una gran proporción de grafito, se montan sobre un porta escobillas y un resorte las presiona al conmutador, el conjunto conmutador – escobillas funcionan como interruptor de inversión, abriendo y cerrando el circuito.
Interruptor centrifugo: Tiene generalmente contactos normalmente cerrados sobre una de las tapas laterales, es un elemento de contrapeso, al adquirir el 75% de su velocidad nominal, la fuerza centrifuga vence la tensión del resorte que abre los contactos y desconecta el devanado de campo y el capacitor.
17

Cubierta o carcaza: Constituye el soporte mecánico para las diversas partes del motor, también protege las partes móviles de influencias exteriores tales como: polvo, agua, contaminantes y cualquier agente externo. Consta de 3 parte, cubierta central ó de campo ó bastidor; y de 2 tapas laterales que son las que centra el eje del rotor y ayudan a su rotación. El bastidor, tapas y caja de terminales, son fabricadas de aleación ligera y dúctil de aluminio ó simplemente fierro proporcionando alta resistencia mecánica.
Rodamientos: Sostienen los ejes de la armadura a los extremos, permiten una rotación con una baja fricción, pueden ir montados sobre el eje del rotor o sobre las tapas laterales; se pueden encontrar en cojinetes o en baleros de bolas o rodillos. En cualquier tipo se requiere de una lubricación constante para garantizar una buena rotación.
Ventilador: Disipa el calor, cuando la armadura gira, el ventilador que va montado sobre el eje del rotor también gira sacando así aire caliente por los orificios de ventilación que se encuentran en el bastidor y en las tapas. El ventilador es una rueda de aletas con un grado de inclinación.
Figura 12. Partes de un motor de C-A
18
Datos de placa
El dato de placa de cada motor indica sus características de operación como son: potencia, voltaje de alimentación, frecuencia, corriente nominal, fabricante, número de serie, clase, tipo, número de polos, velocidad, eficiencia, factor de potencia, etc.
Para su correcta instalación, reparación, es importante conocer sus valores de funcionamiento para garantizar un correcto rendimiento
Figura 13. Placa de datos de motor
Clasificación de Motores Eléctricos
Motores de corriente continua:
Motor de derivación ó Shunt
Motor tipo serie
Motor Compound
Motores de corriente alterna:
Motor de inducción (polifásicos)
Motor de fase partida ó dividida (monofásico)
Motor de capacitor ó condensador (monofásico)
Motor de polos sombreados (monofásicos)
Motor de rotor devanado ó anillos rozantes (polifásicos)
19

Motor de repulsión - inducción
Motor de corriente alterna con conmutador
Motor síncrono
Motor universal (C.A. C.C.)
Motores de Corriente Continua
En general, los motores de corriente continua son similares en su construcción a los generadores. De hecho podrían describirse como generadores que funcionan al revés. Cuando la corriente pasa a través de la armadura de un motor de corriente continua, se genera un par de fuerzas debido a la acción del campo magnético, y la armadura gira (véase Momento de una fuerza). La función del conmutador y la de las conexiones de las bobinas del campo de los motores es exactamente la misma que en los generadores. La revolución de la armadura induce un voltaje en las bobinas de ésta. Este voltaje es opuesto al voltaje exterior que se aplica a la armadura, y de ahí que se conozca como voltaje inducido o fuerza contraelectromotriz. Cuando el motor gira más rápido, el voltaje inducido aumenta hasta que es casi igual al aplicado. La corriente entonces es pequeña, y la velocidad del motor permanecerá constante siempre que el motor no esté bajo carga y tenga que realizar otro trabajo mecánico que no sea el requerido para mover la armadura. Bajo carga, la armadura gira más lentamente, reduciendo el voltaje inducido y permitiendo que fluya una corriente mayor en la armadura.
Debido a que la velocidad de rotación controla el flujo de la corriente en la armadura, deben usarse aparatos especiales para arrancar los motores de corriente continua. Cuando la armadura está parada, ésta no tiene realmente resistencia, y si se aplica el voltaje de funcionamiento normal, se producirá una gran corriente, que podría dañar el conmutador y las bobinas de la armadura. El medio normal de prevenir estos daños es el uso de una
20

resistencia de encendido conectada en serie a la armadura, para disminuir la corriente antes de que el motor consiga desarrollar el voltaje inducido adecuado. Cuando el motor acelera, la resistencia se reduce gradualmente, tanto de forma manual como automática.
La velocidad a la que funciona un motor depende de la intensidad del campo magnético que actúa sobre la armadura, así como de la corriente de ésta. Cuanto más fuerte es el campo, más bajo es el grado de rotación necesario para generar un voltaje inducido lo bastante grande como para contrarrestar el voltaje aplicado. Por esta razón, la velocidad de los motores de corriente continua puede controlarse mediante la variación de la corriente del campo.
Plano Neutro
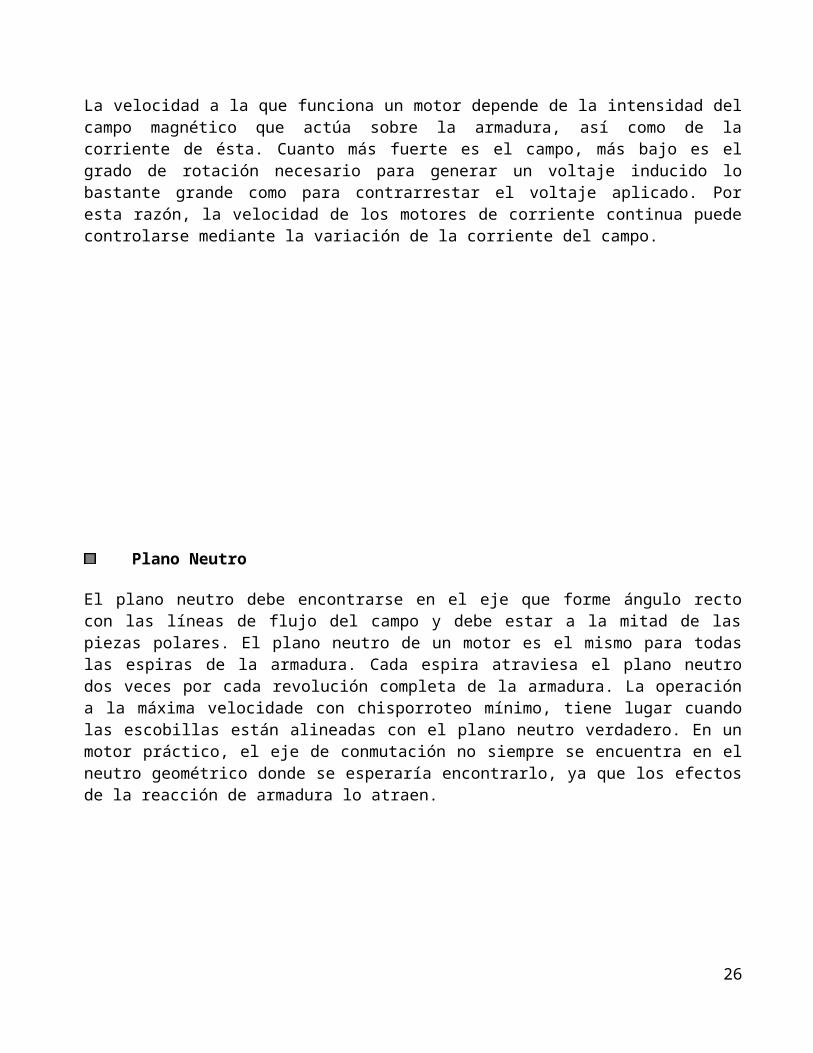
El plano neutro debe encontrarse en el eje que forme ángulo recto con las líneas de flujo del campo y debe estar a la mitad de las piezas polares. El plano neutro de un motor es el mismo para todas las espiras de la armadura. Cada espira atraviesa el plano neutro dos veces por cada revolución completa de la armadura. La operación a la máxima velocidade con chisporroteo mínimo, tiene lugar cuando las escobillas están alineadas con el plano neutro verdadero. En un motor práctico, el eje de conmutación no siempre se encuentra en el neutro geométrico donde se esperaría encontrarlo, ya que los efectos de la reacción de armadura lo atraen.
21

Figura 14. Plano neutro de un motor
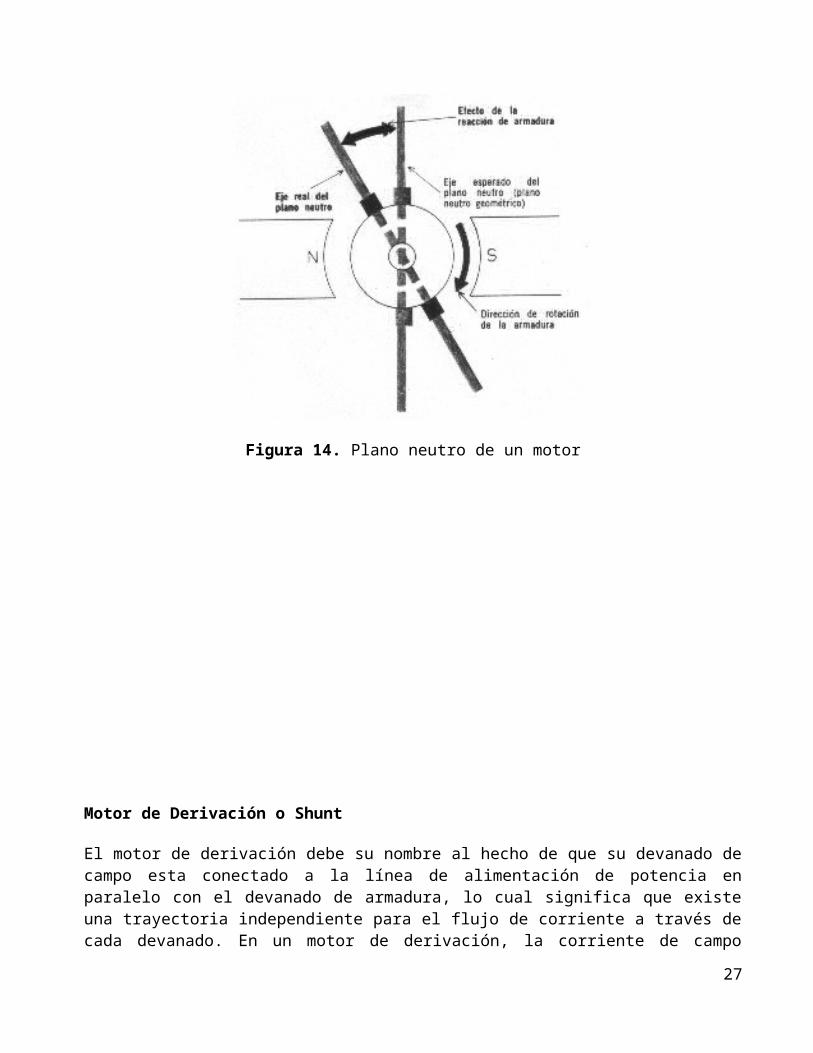
Motor de Derivación o Shunt
El motor de derivación debe su nombre al hecho de que su devanado de campo esta conectado a la línea de alimentación de potencia en paralelo con el devanado de armadura, lo cual significa que existe una trayectoria independiente para el flujo de corriente a través de cada devanado. En un motor de derivación, la corriente de campo puede mantenerse constante y el circuito de armadura solo sirve para controlar al motor.
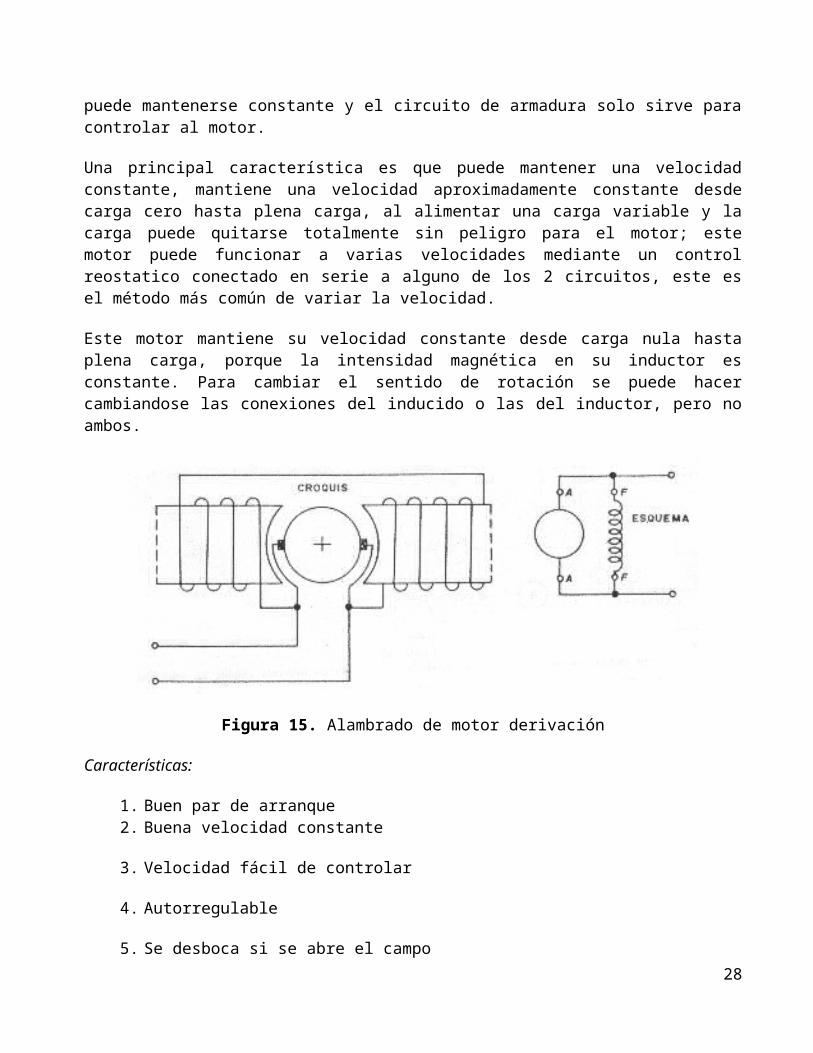
Una principal característica es que puede mantener una velocidad constante, mantiene una velocidad aproximadamente constante desde carga cero hasta plena carga, al alimentar una
22

carga variable y la carga puede quitarse totalmente sin peligro para el motor; este motor puede funcionar a varias velocidades mediante un control reostatico conectado en serie a alguno de los 2 circuitos, este es el método más común de variar la velocidad.
Este motor mantiene su velocidad constante desde carga nula hasta plena carga, porque la intensidad magnética en su inductor es constante. Para cambiar el sentido de rotación se puede hacer cambiandose las conexiones del inducido o las del inductor, pero no ambos.
Figura 15. Alambrado de motor derivación
Características:
1. Buen par de arranque2. Buena velocidad constante
3. Velocidad fácil de controlar
4. Autorregulable
5. Se desboca si se abre el campo
Control de velocidad:
Este motor puede funcionar a varias velocidades mediante un control reostático ya sea en serie con el devanado de campo, el devanado de armadura o ambos, este es el método más común. En el caso del reóstato de campo, la disminución del flujo de corriente hace que el motor aumente su velocidad. La disminución del flujo de corriente de armadura hace más lenta la marcha del motor.
23
Figura 16. Diagramas de control de velocidad
Motores tipo Serie
El motor tipo serie debe su nombre al hecho de que su devanado de campo está conectado en serie con la armadura, lo cual significa que fluye una corriente común a través de ambos devanados. Lo que suceda a la corriente de armadura a causa del impulso de una carga se siente automáticamente en el devanado de campo.
El motor tipo serie no funciona a velocidad constante, en el motor en derivación, cuando el par aumenta, la velocidad también aumenta y viceversa. En el motor serie, sucede lo contrario, es decir: el par y la velocidad son inversamente proporcionales. Esto significa que cuando el par es elevado, la velocidad es baja; y cuando el par es bajo, la velocidad es alta. En un motor derivación al aumentar la carga, hace mas lento el funcionamiento del motor, entonces la armadura toma más corriente para aumentar el par, como primer paso para producir mayor velocidad y fuerza contra electromotriz.
Sin embargo en el motor serie, esta corriente adicional de armadura también fluye en el devanado en serie del campo. Así pues el flujo del campo aumenta y restaura la FCEM, de tal manera que esto evita que el motor cobre velocidad como lo que ocurría en el derivación.
24
Figura 17. Esquema motor tipos serie
Características:
1. Alto par de arranque2. La velocidad varia según la carga
3. Se desboca cuando no tiene carga
La regulación de velocidad es muy pobre, la velocidad varia inversamente con la carga, lo que significa que a mayor carga menor velocidad y que a menor carga mayor velocidad. Debe cuidarse que el motor siempre tenga suficiente carga para que la velocidad no rebase los límites de seguridad. Si la carga se reduce a cero el motor probablemente se aceleraría hasta destruirse.
Un motor serie es de aplicación limitada debido a su pobre regulación de velocidad. La velocidad puede controlarse por encima del valor normal conectando un resistor ajustable en paralelo con el devanado serie del inductor. Tal resistor se llama “Shunt” del devanado serie. La velocidad variará inversamente con la intensidad magnética. Controlando la velocidad sobre el valor normal se reduce el par posible pero no se altera la potencia de salida.
25
Motor Compound
La característica de velocidad constante del motor de derivación no la tiene el motor serie. La característica de alto par en el motor serie no la tiene el motor derivación. Estas características particulares se pueden combinar dando al motor dos devanados de campo: uno conectado en serie con la armadura y el otro en paralelo con ella.
Para comprender el funcionamiento, considere un motor de derivación con un campo en serie extra. Al aumentar la carga en este tipo de motor y aminorar su velocidad, el aumento resultante en la corriente de armadura también hace que se aumente la intensidad en el devanado de campo en serie. Como se obtiene mayor cantidad de flujo interactuante, el par aumenta.
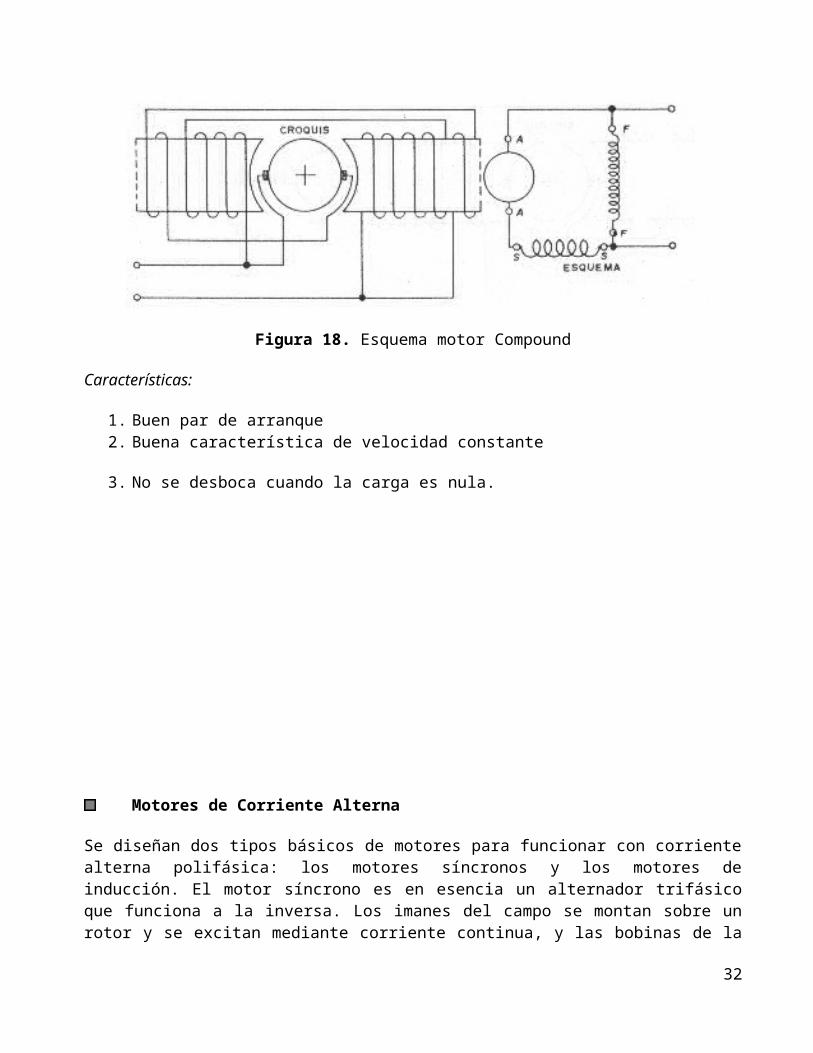
Figura 18. Esquema motor Compound
Características:
1. Buen par de arranque2. Buena característica de velocidad constante
3. No se desboca cuando la carga es nula.
26
Motores de Corriente Alterna
Se diseñan dos tipos básicos de motores para funcionar con corriente alterna polifásica: los motores síncronos y los motores de inducción. El motor síncrono es en esencia un alternador trifásico que funciona a la inversa. Los imanes del campo se montan sobre un rotor y se excitan mediante corriente continua, y las bobinas de la armadura están divididas en tres partes y alimentadas con corriente alterna trifásica. La variación de las tres ondas de corriente en la armadura provoca una reacción magnética variable con los polos de los imanes del campo, y hace que el campo gire a una velocidad constante, que se determina por la frecuencia de la corriente en la línea de potencia de corriente alterna. La velocidad constante de un motor síncrono es ventajosa en ciertos aparatos. Sin embargo, no puede utilizarse este tipo de motores en aplicaciones en las que la carga mecánica sobre el motor llega a ser muy grande, ya que si el motor reduce su velocidad cuando está bajo carga puede quedar fuera de fase con la frecuencia de la corriente y llegar a pararse. Los motores síncronos pueden funcionar con una fuente de potencia monofásica mediante la inclusión de los elementos de circuito adecuados para conseguir un campo magnético rotatorio.
El más simple de todos los tipos de motores eléctricos es el motor de inducción de caja de ardilla que se usa con alimentación trifásica. La armadura de este tipo de motor consiste en tres bobinas fijas y es similar a la del motor síncrono. El elemento rotatorio consiste en un núcleo, en el que se incluye una serie de conductores de gran capacidad colocados en círculo alrededor del árbol y paralelos a él. Cuando no tienen núcleo, los conductores del rotor se parecen en su forma a las jaulas cilíndricas que se usaban para las ardillas. El flujo de la corriente trifásica dentro de las bobinas de la armadura fija genera un campo magnético rotatorio, y éste induce una corriente en los conductores de la jaula. La reacción magnética entre el campo rotatorio y los conductores del rotor que transportan la corriente hace que éste gire. Si el rotor da vueltas exactamente a la misma velocidad que el campo magnético, no habrá en él corrientes inducidas, y, por tanto, el rotor no debería girar a una velocidad síncrona. En funcionamiento, la velocidad de rotación del rotor y la del campo difieren entre sí de un 2 a un 5%. Esta diferencia de velocidad se conoce como caída.
Los motores con rotores del tipo jaula de ardilla se pueden usar con corriente alterna monofásica utilizando varios dispositivos de inductancia y capacitancia, que alteren las características del voltaje monofásico y lo hagan parecido al bifásico. Estos motores se denominan motores multifásicos o motores de condensador (o de capacidad), según los dispositivos que usen. Los motores de jaula de ardilla monofásicos no tienen un par de arranque grande, y se utilizan motores de repulsión-inducción para las aplicaciones en las que se requiere el par. Este tipo de motores pueden ser multifásicos o de condensador, pero disponen de un interruptor manual o automático que permite que fluya la corriente entre las escobillas del conmutador cuando se arranca el motor, y los circuitos cortos de todos los segmentos del conmutador, después de que el motor alcance una velocidad crítica. Los motores de repulsión-inducción se denominan así debido a que su par de arranque depende de la repulsión entre el rotor y el estátor, y su par, mientras está en funcionamiento, depende de la inducción. Los motores de baterías en serie con conmutadores, que funcionan tanto
27
con corriente continua como con corriente alterna, se denominan motores universales. Éstos se fabrican en tamaños pequeños y se utilizan en aparatos domésticos.
Operación Básica del Motor de CA
Un motor de CA tiene dos partes eléctricas básicas: un "estator" y un "rotor", como se muestra en la Figura 19. El estator está en el componente eléctrico estático. Consiste en un grupo de electroimanes individuales dispuestos de una manera tal que formen un cilindro hueco, con un polo de cada cara de los imanes hacia el centro del grupo. El término, "estator" se deriva de la palabra estática. El rotor es el componente eléctrico rotativo, el cual consiste en un grupo de electroimanes dispuestos alrededor de un cilindro, con los polos haciendo frente hacia los polos del estator. El rotor, está situado obviamente dentro del estator y montado en el eje del motor. El término "rotor" se deriva de la palabra rotar. El objetivo de estos componentes del motor es hacer que el rotor gire sobre el eje del motor. Esta rotación ocurrirá debido al fenómeno magnético previamente discutido que los polos opuestos se atraen y polos iguales se rechazan. Si cambiamos progresivamente la polaridad de los polos del estator de una manera tal que su campo magnético combinado rote, entonces el rotor seguirá girando con el campo magnético del estator.
Figura 19. Componentes eléctricos básicos de un motor de CA.
En la Figura 20 se muestra como van rotando los campos magnéticos del estator. De acuerdo con la figura, el estator tiene seis polos magnéticos y el rotor tiene dos polos. En el tiempo 1, los polos A-1 del estator y el C-2 son polos Norte y los polos opuestos, A-2 y C-1, son los polos sur. El polo S del rotor es atraído por los dos polos N del estator y el polo N del rotor es atraído por los dos polos del sur del estator. En el tiempo 2, la polaridad de los postes del estator se cambia de modo que ahora el C-2 y B-1 son los polos N y C-1 y B-2 son los polos S. Entonces el rotor se ve forzado a rotar 60 grados para alinearse con los polos del estator según lo demostrado en la figura. En el tiempo 3, B-1 y A-2 son los polos N. En el tiempo 4, A-2 y C-1 son los polos N. Mientras que se realiza cada cambio, los polos del
28

rotor son atraídos por los polos opuestos en el estator. Así, como el campo magnético del estator rota, el rotor se ve forzado a rotar con él.
Figura 20. Rotación del campo magnético de un motor de CA.
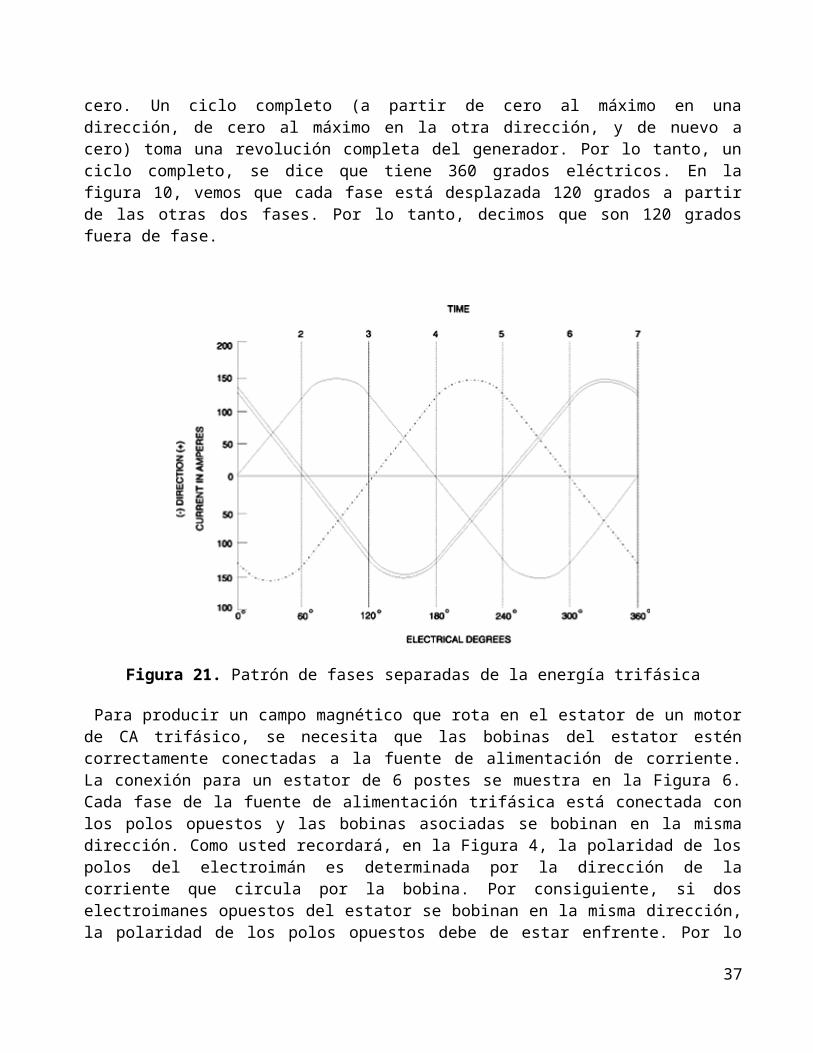
Una forma para producir un campo magnético que rota en el estator de un motor de CA es utilizar una fuente de alimentación trifásica para las bobinas del estator. Se preguntará ¿Qué, es la energía trifásica? La respuesta a esa pregunta puede ser entendida mejor si primero examinamos la energía monofásica. El generador de CA asociado produce justamente un flujo de corriente eléctrica cuya dirección e intensidad descienden según lo indicado por la línea continua de la gráfica. Del tiempo 0 al tiempo 3, la corriente fluye en el conductor en dirección positiva. Del tiempo 3 al tiempo 6, la corriente fluye en dirección negativa. En cualquier tiempo, la corriente fluye solamente en una dirección. Pero algunos generadores producen flujos en tres fases separadas en el mismo circuito. A esto se refiere la energía trifásica. En ningún un instante, sin embargo, la dirección y la intensidad de cada flujo actual separado no es igual al de las otras fases (véase Figura 21). Las tres fases separadas (flujos actuales) se etiquetan A, B y C.
En el tiempo 1, ponga en fase A está en los Amperes cero, la fase B está cerca de su amperaje máximo y fluye en dirección positiva, y la fase C está cerca a su amperaje máximo pero fluye en dirección negativa. En el tiempo 2, el amperaje de la fase A está aumentando y el flujo es positivo, el amperaje de la fase B está disminuyendo y su flujo sigue siendo negativo, y la fase C ha caído a los amperes cero. Un ciclo completo (a partir de cero al máximo en una dirección, de cero al máximo en la otra dirección, y de nuevo a cero) toma una revolución completa del generador. Por lo tanto, un ciclo completo, se dice que tiene 360 grados eléctricos. En la figura 10, vemos que cada fase está desplazada 120 grados a partir de las otras dos fases. Por lo tanto, decimos que son 120 grados fuera de fase.
29
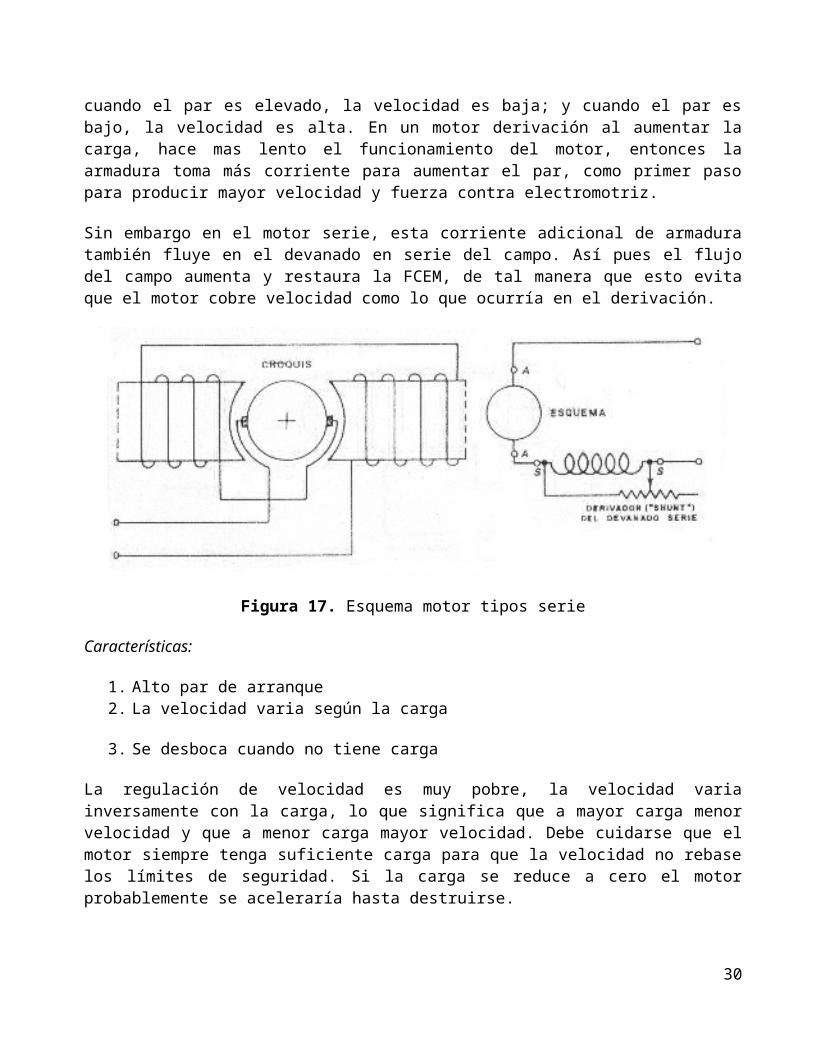
Figura 21. Patrón de fases separadas de la energía trifásica
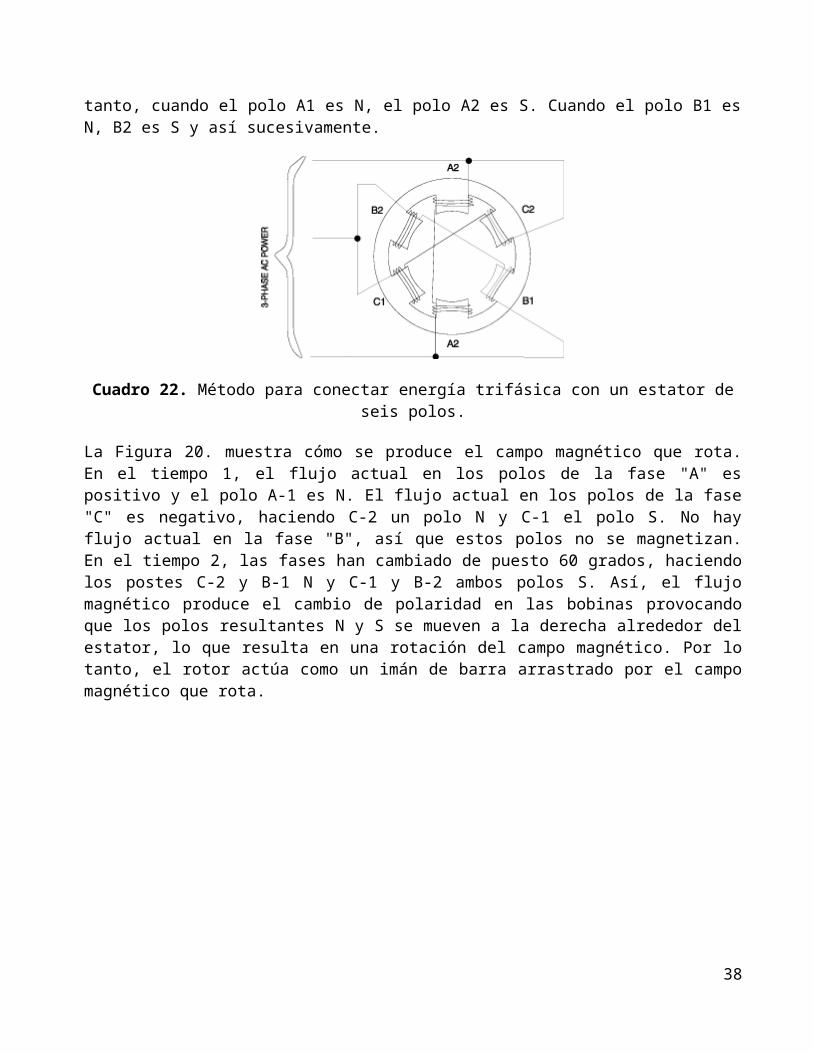
Para producir un campo magnético que rota en el estator de un motor de CA trifásico, se necesita que las bobinas del estator estén correctamente conectadas a la fuente de alimentación de corriente. La conexión para un estator de 6 postes se muestra en la Figura 6. Cada fase de la fuente de alimentación trifásica está conectada con los polos opuestos y las bobinas asociadas se bobinan en la misma dirección. Como usted recordará, en la Figura 4, la polaridad de los polos del electroimán es determinada por la dirección de la corriente que circula por la bobina. Por consiguiente, si dos electroimanes opuestos del estator se bobinan en la misma dirección, la polaridad de los polos opuestos debe de estar enfrente. Por lo tanto, cuando el polo A1 es N, el polo A2 es S. Cuando el polo B1 es N, B2 es S y así sucesivamente.
Cuadro 22. Método para conectar energía trifásica con un estator de seis polos.
30

La Figura 20. muestra cómo se produce el campo magnético que rota. En el tiempo 1, el flujo actual en los polos de la fase "A" es positivo y el polo A-1 es N. El flujo actual en los polos de la fase "C" es negativo, haciendo C-2 un polo N y C-1 el polo S. No hay flujo actual en la fase "B", así que estos polos no se magnetizan. En el tiempo 2, las fases han cambiado de puesto 60 grados, haciendo los postes C-2 y B-1 N y C-1 y B-2 ambos polos S. Así, el flujo magnético produce el cambio de polaridad en las bobinas provocando que los polos resultantes N y S se mueven a la derecha alrededor del estator, lo que resulta en una rotación del campo magnético. Por lo tanto, el rotor actúa como un imán de barra arrastrado por el campo magnético que rota.
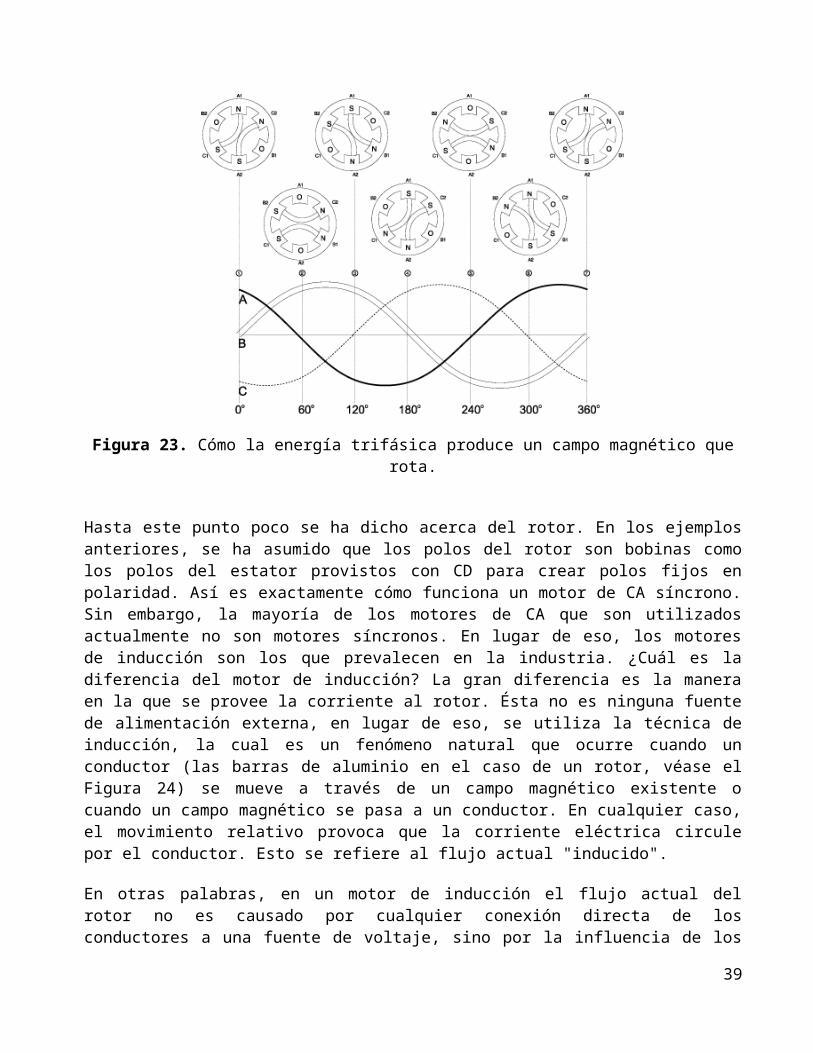
Figura 23. Cómo la energía trifásica produce un campo magnético que rota.
Hasta este punto poco se ha dicho acerca del rotor. En los ejemplos anteriores, se ha asumido que los polos del rotor son bobinas como los polos del estator provistos con CD para crear polos fijos en polaridad. Así es exactamente cómo funciona un motor de CA síncrono. Sin embargo, la mayoría de los motores de CA que son utilizados actualmente no son motores síncronos. En lugar de eso, los motores de inducción son los que prevalecen en la industria. ¿Cuál es la diferencia del motor de inducción? La gran diferencia es la manera en la que se provee la corriente al rotor. Ésta no es ninguna fuente de alimentación externa, en lugar de eso, se utiliza la técnica de inducción, la cual es un fenómeno natural que ocurre cuando un conductor (las barras de aluminio en el caso de un rotor, véase el Figura 24) se mueve a través de un campo magnético existente o cuando un campo magnético se pasa a un conductor. En cualquier caso, el movimiento relativo provoca que la corriente eléctrica circule por el conductor. Esto se refiere al flujo actual "inducido".
31
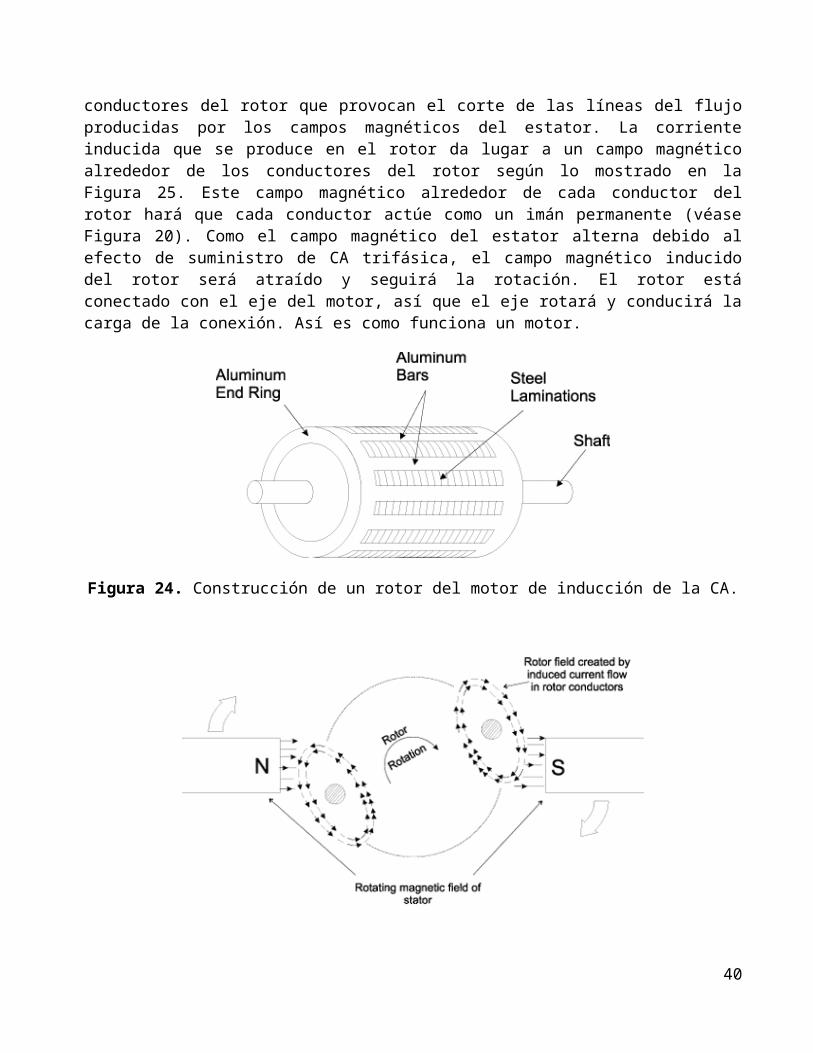
En otras palabras, en un motor de inducción el flujo actual del rotor no es causado por cualquier conexión directa de los conductores a una fuente de voltaje, sino por la influencia de los conductores del rotor que provocan el corte de las líneas del flujo producidas por los campos magnéticos del estator. La corriente inducida que se produce en el rotor da lugar a un campo magnético alrededor de los conductores del rotor según lo mostrado en la Figura 25. Este campo magnético alrededor de cada conductor del rotor hará que cada conductor actúe como un imán permanente (véase Figura 20). Como el campo magnético del estator alterna debido al efecto de suministro de CA trifásica, el campo magnético inducido del rotor será atraído y seguirá la rotación. El rotor está conectado con el eje del motor, así que el eje rotará y conducirá la carga de la conexión. Así es como funciona un motor.
Figura 24. Construcción de un rotor del motor de inducción de la CA.
Figura 25. Cómo el voltaje se induce en el rotor, dando por resultado flujo actual en los conductores del rotor.
32

Motor de Polos Sombreados
Este tipo de motor es un motor de inducción monofásico provisto de un devanado auxiliar, sin aislamiento permanentemente conectado en corto circuito, y con un desplazamiento en su posición magnética respecto al devanado principal. Tal devanado consiste en anillos cerrados ó en corto circuito llamados bobinas sombreantes que generalmente es una pieza estampada rectangular de cobre. Este tipo de motor funciona con baja eficiencia y se construye en tamaños ó capacidades que no exceden de 1/20 Hp. Se utilizan en cualquier carga de velocidad constante que no requiera alto par de arranque.
Cuando aumenta la intensidad de la corriente en las bobinas principales se induce una corriente en las auxiliares que se oponen magnéticamente al campo creciente formado en la parte de la pieza polar ó polo que rodea cada una.
Cuando disminuye la intensidad en el devanado principal, la de las bobinas sombreantes también decrece hasta que las piezas polares se magnetizan uniformemente. A medida que la intensidad en la bobina principal y el flujo polar continúan decreciendo, la intensidad en la bobina sombreante cambia de sentido y tiende a mantener el flujo en su parte del polo.
Cuando la intensidad en el devanado principal se reduce a cero, todavía circula corriente en las bobinas sombreantes; en otras palabras existe un desplazamiento del campo magnético, que da lugar al arranque.
Figura 26. Esquema motor de polos sombreantes
33

Motor de Inducción ó Jaula de Ardilla
Los motores jaula de ardilla ó de inducción son máquinas motrices altamente confiables y pueden utilizarse para impulsar cualquier máquina de velocidad prácticamente constante, donde se requiere corriente alterna polifásica. Se emplean con frecuencia en equipo industrial y excepcionalmente en aparatos domésticos, puesto que por lo general el servicio de esta clase de motor es monofásico.
Estos motores tienen una velocidad prácticamente constante, gran confiabilidad, no existen escobillas ni interruptores centrífugos dentro del motor, el único contacto del rotor son los rodamientos; fácilmente reversibles, puede invertirse la rotación intercambiandolas conexiones de línea, par de arranque alto. Se fabrican en potencias de 1/70 Hp hasta ¼ Hp a 1725 rpm. Puede utilizarse donde se requiere alto par de arranque y baja intensidad en el mismo.
Este motor como su nombre lo dice, cuenta con un rotor jaula de ardilla, da servicios más prolongados sin problemas de funcionamiento, el modo de operación es debido a la inducción electromagnética que recibe el rotor.
Figura 27. Vista interna de motor de inducción
34

El campo giratorio.
El motor en jaula de ardilla consiste en un bastidor o estator fijo que reciben los devanados estacionarios, y un miembro rotatorio, llamado "rotor". Éste se construye de laminaciones de acero montadas rígidamente en la flecha del motor. El devanado del rotor del motor en jaula de ardilla consiste en muchas barras de cobre o aluminio montadas dentro de unas ranuras del rotor, con las barras conectadas en cada extremo mediante un anillo continuo. La estructura de las barras del rotor con los anillos de los extremos, semeja una jaula de ardilla y esto da su nombre al motor.
En un motor trifásico hay tres embobinados en el bastidor del estator, en tanto que en 1os (de dos fases se emplean dos embobinados. Éstos se conectan a la fuente de energía.
Cuando fluye una corriente de 60 cielos en el devanado del estator (que nunca tiene menos de d( polos), se produce un campo magnético. Este campo gira alrededor del rotor a una velocidad de 3,600 revoluciones por minuto divididas entre el número de pares de polos del estator. Por tanto, en un sistema de 60 ciclos, un motor que posee un par de polos girará a 3,600 r.p.m uno de cuatro polos funcionará a 1,800 r.p.m. Este campo giratorio induce corriente en barras del rotor en corto circuito; el valor de las corrientes será mayor cuando el motor encuentre en reposo y disminuirá al aumentar la velocidad. Modificando la resistencia y reactancia del rotor, se pueden cambiar las características del motor, pero para cualquier diseño de rotor, estas características son fijas. No hay conexiones externas al rotor.
Velocidad del rotor sin carga.
Las fuerzas magnéticas que actúan en las barras del rotor debidas a la corriente inducida, hacen que aquél gire en la dirección de rotación del campo d estator. El motor acelera hasta alcanzar una velocidad correspondiente al deslizamiento necesario para superar las pérdidas por las fricciones del aire y mecánicas. Esta velocidad se cono como "velocidad sin carga". El motor nunca puede alcanzar la velocidad sincrónica, porque esas condiciones no se induciría corriente en el rotor y el motor no produciría torque.
Velocidad bajo carga.
Cuando el rotor disminuye su velocidad al encontrarse sometida una carga, la velocidad se ajusta automáticamente hasta el punto en que las fuerzas ejerció por el campo magnético sobre el rotor son suficientes para vencer el torque requerido por carga. La diferencia entre la velocidad del campo magnético y la del rotor, se conoce como "deslizamiento".
El deslizamiento necesario para conducir la carga total depende de las características motor. En general, mientras más alta es la corriente que se toma, menor será el deslizamiento con que el motor puede transportar la carga total, y mayor será la eficiencia. Si la corriente que se toma es más baja, será mayor el deslizamiento con que el motor puede manejar la carga total, y menor será la eficiencia.
35

Un aumento en el voltaje de la línea disminuye el deslizamiento, en tanto una reducción aumenta; en cualquier caso, en el rotor se induce suficiente corriente para conducir la cal Una disminución en el voltaje de la línea tiene el efecto de aumentar el calentamiento motor. Al aumentar el voltaje de la línea disminuye el calentamiento; en otras palabras motor puede manejar una carga mayor; el deslizamiento con la carga normal puede variar de tres hasta veinte por ciento, para diferentes tipos de motores.
Corrientes del rotor bloqueado.
La corriente del rotor bloqueado, y el torque resultar son los factores que determinan si el motor puede conectarse a través de la línea o si necesario reducir la corriente para obtener el funcionamiento deseado. Las corrientes del re bloqueado, para diferentes tipos de motores, pueden variar desde 2 112 a 10 veces el valor d, corriente a plena carga, pero existen motores que toman corrientes aún mayores.
Torque de control.
El método más común de arranque para el motor polifásico de inducción, en jaula de ardilla, es "a través de la línea", conectando la máquina directamente sistema de distribución de la planta a pleno voltaje, usando un arrancador manual o magnética Desde el punto de vista del motor en sí, ésta es una práctica perfectamente aceptable; realidad, éste es, probablemente, el método más deseable. El motor, propiamente dicho, rara vez es el punto en cuestión al considerar los métodos de arranque. La protección cor sobrecarga ha alcanzado un estado de refinamiento que proporcionará al motor, en todo momento, un arranque seguro. Laaplicaci6n de voltaje reducido en un intento de evitar que el motor se sobrecaliente durante la aceleración es, generalmente, una pérdida de esfuerzo, que el tiempo de aceleración aumentará y los elementos de sobrecarga del tamaño corriente cualquier forma se dispararán.
La necesidad de métodos de arranque, además del sistema a pleno voltaje, se debe, principalmente, a factores ajenos al motor propiamente dicho. Sin embargo, deberá notarse que una vez que se ha establecido la necesidad de otro método diferente al de conexión directa a la
Combinación de interruptor de desconexión y arrancador
Freno típico de 30 pulgadas
Bastidor, estator y rotor de un motor de inducción del tipo en jaula de ardilla
36
La Corriente Nominal de los Motores de Inducción.
Este valor representa la corriente que demanda un motor de su fuente de alimentación cuando desarrolla su potencia nominal. Debido a que las potencias de los motores (expresada en Kw o Hp) se encuentran normalizadas de acuerdo al número de fases y voltaje de alimentación y considerando también que para las velocidades de operación más comunes a la frecuencia de alimentación, para un número de polos dado, estos valores se encuentran dentro de rangos típicos que aparecen en las normas técnicas para instalaciones eléctricas, en los catálogos de los fabricantes de motores y equipo de control, en reglas de cálculo diseñadas ex profeso, etc., y estos valores son los que se usan para el cálculo de las componentes de su instalación eléctrica.
Cuando se requieren conocer la máxima y la mínima corriente de arranque, entonces es posible hacer uso de la información relacionadas con las letras de código. En consecuencia, si la potencia de un motor en Hp y su letra de código se leen de sus datos de placa, se puede calcular en forma muy sencilla los kVA de arranque y la corriente máxima de arranque.
37
El motor trifásico:
El motor jaula de ardilla es el más usado de los motores polifásicos, se conecta a los tres conductores de la línea; tiene tres devanados de estator distribuidos en las ranuras de éste y separados entre sí 120o eléctricos. Tales devanados pueden conectarse en delta o estrella, uniéndose los conductores terminales a los tres puntos de conexión. Se utiliza con frecuencia porque se obtienen menores intensidades de fase y por tanto conductores de menor diámetro para el mismo voltaje de línea.
El motor bifásico:
Se puede usar potencia bifásica de entrada para energizar dos devanados que hagan girar el campo, este motor tiene un buen par de arranque y buen par de funcionamiento, la diferencia de fases es de 90o usando potencia eléctrica de 2 fases.
38
Motor de Fase Partida ó Dividida
Un motor de este tipo es un motor monofásico que obtiene su par de arranque mediante dos devanados del estator. Los devanados de arranque y trabajo están situados en diferentes regiones ó sectores del estator; estos motores se emplean porque se adaptan admirablemente a aplicaciones que requieren un motor confiable de bajo costo y par moderado, de construcción y funcionamiento esencialmente simples, un motor de fase partida dará muchos años de operación. Estos motores se utilizan en máquinas y aparatos domésticos como lavadoras, ventiladores, etc. Pueden emplearse para toda carga pequeña que no requiera un alto par de arranque y pueda funcionar a velocidad constante.
Figura 30. Esquema motor de fase partida o dividida
Para que arranque por si solo el devanado de estator de un motor de inducción de jaula de ardilla, debe ser capaz de producir un campo magnético rotatorio. Como tal campo no puede ser producido por un solo devanado, debe contarse con un medio para dividirla en 2 corrientes defasadas aproximadamente 90o. Esto se obtiene haciendo circular la corriente monofásica por dos trayectorias en paralelo cuyas características eléctricas son diferentes.
39
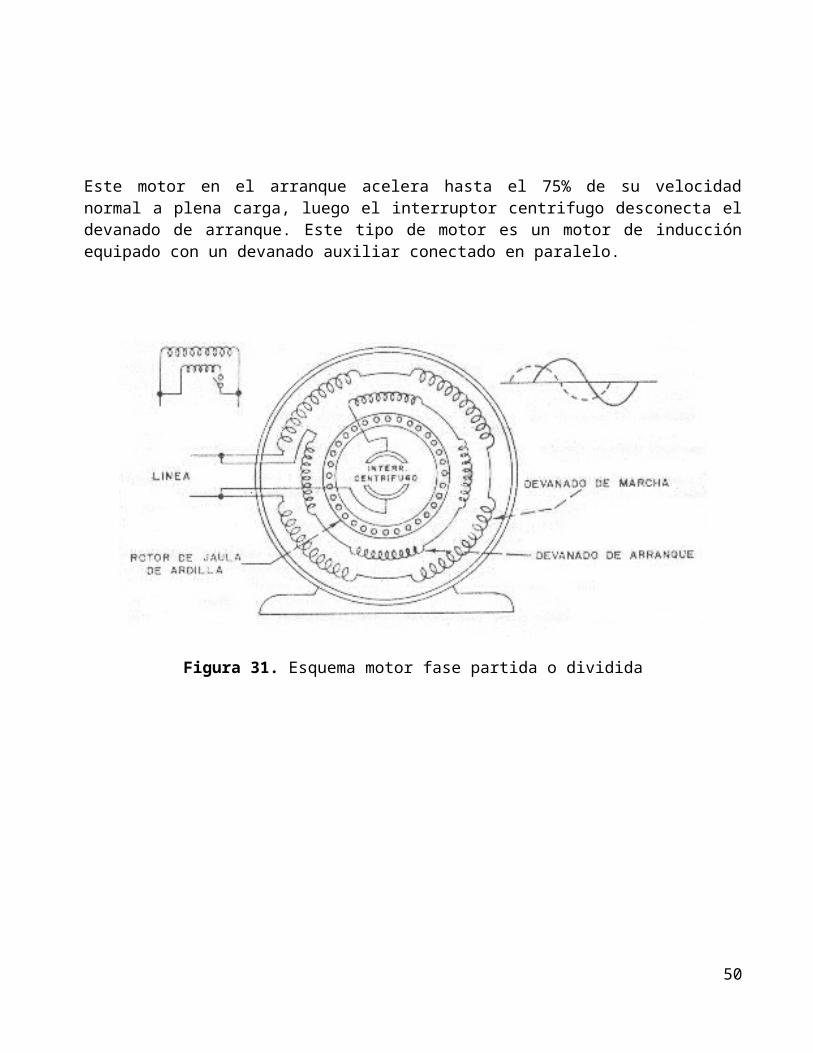
Este motor en el arranque acelera hasta el 75% de su velocidad normal a plena carga, luego el interruptor centrifugo desconecta el devanado de arranque. Este tipo de motor es un motor de inducción equipado con un devanado auxiliar conectado en paralelo.
Figura 31. Esquema motor fase partida o dividida
40

Motor de Capacitor
Algunas máquinas requieren un mayor par para arrancar que el que puede proporcionar un motor de fase partida. Está diseñado para estas aplicaciones y difiere del otro en que tiene un condensador en serie con el devanado de arranque. El uso del condensador da al motor un alto par de arranque, se utilizan en refrigeradores por lo general.
Los 2 devanados están en diferentes sectores del estator. El de arranque, el capacitor y el interruptor centrifugo están conectados en serie. Este último esta montado en el rotor y dispuesto para que abra el circuito a una velocidad predeterminada. Este tipo de motor ofrece alto confiabilidad , funcionamiento silencioso y un alto factor de potencia.
Figura 32. Esquema motor con capacitor
41

Motor de Inducción con Rotor Devanado
Es factible construir un motor de inducción de C-A con devanados alrededor del núcleo del rotor, en lugar de las barras conductoras del rotor jaula de ardilla. En este caso, las corrientes se inducen en el devanado tal como ocurre cuando se trata de espiras conectadas en corto. Sin embargo, la ventaja es que en las terminales de estos, pueden sacarse a través de anillos deslizantes, de manera que pueda controlarse la resistencia y en consecuencia la corriente que fluye en los devanados.
Este motor solo se conecta con potencia trifásica de C-A, las 3 terminales de los devanados del rotor salen hasta 3 anillos deslizantes montados sobre el eje del rotor. Una característica especial en este tipo es su velocidad variable; al variar la resistencia del reóstato. Un motor de este tipo funciona por el mismo principio que el jaula de ardilla, ya que el campo magnético rotatorio establecido por el devanado del estator reacciona con los polos magnéticos inducidos en el rotor donde se da lugar al giro. La introducción de resistencia en el circuito del rotor da las siguientes ventajas:
a) Alto par de arranqueb) Baja intensidad de corriente en el arranque
c) Acción de arranque gradual y uniforme
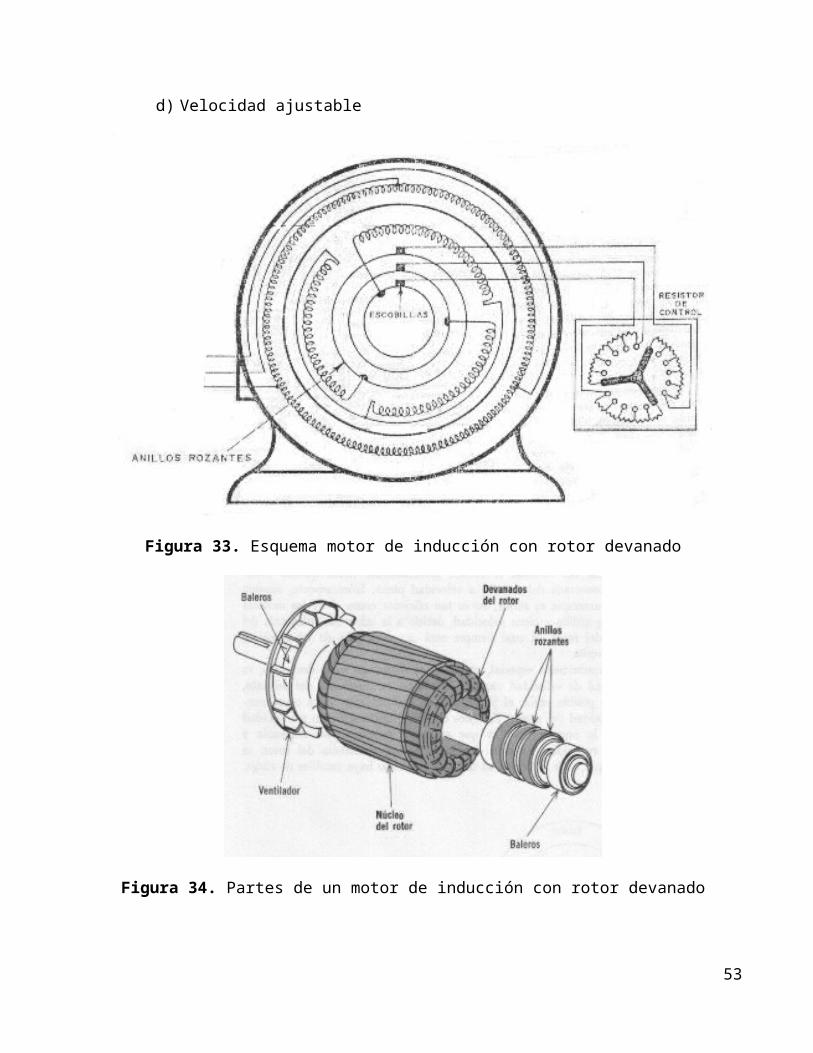
d) Velocidad ajustable
Figura 33. Esquema motor de inducción con rotor devanado
42

Figura 34. Partes de un motor de inducción con rotor devanado
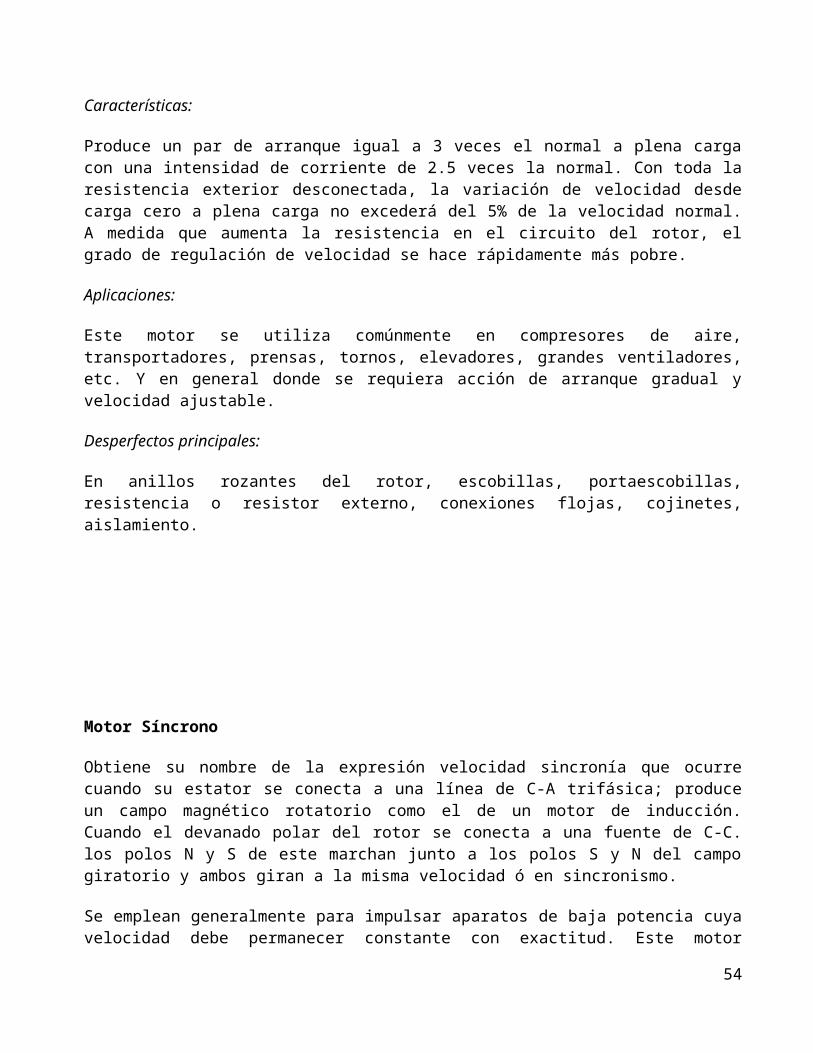
Características:
Produce un par de arranque igual a 3 veces el normal a plena carga con una intensidad de corriente de 2.5 veces la normal. Con toda la resistencia exterior desconectada, la variación de velocidad desde carga cero a plena carga no excederá del 5% de la velocidad normal. A medida que aumenta la resistencia en el circuito del rotor, el grado de regulación de velocidad se hace rápidamente más pobre.
Aplicaciones:
Este motor se utiliza comúnmente en compresores de aire, transportadores, prensas, tornos, elevadores, grandes ventiladores, etc. Y en general donde se requiera acción de arranque gradual y velocidad ajustable.
Desperfectos principales:
En anillos rozantes del rotor, escobillas, portaescobillas, resistencia o resistor externo, conexiones flojas, cojinetes, aislamiento.
43
Motor Síncrono
Obtiene su nombre de la expresión velocidad sincronía que ocurre cuando su estator se conecta a una línea de C-A trifásica; produce un campo magnético rotatorio como el de un motor de inducción. Cuando el devanado polar del rotor se conecta a una fuente de C-C. los polos N y S de este marchan junto a los polos S y N del campo giratorio y ambos giran a la misma velocidad ó en sincronismo.
Se emplean generalmente para impulsar aparatos de baja potencia cuya velocidad debe permanecer constante con exactitud. Este motor utiliza un rotor devanado con anillos rozantes. La mayor parte de los motores síncronos están construidos para funcionar a velocidades bajas y moderadas.
Los motores sincrónicos son motores que trabajan a una velocidad sincrónica constante. Está velocidad se determina por la frecuencia de la fuente de energía y el número de polos del motor. Estos motores se fabrican en una amplia variedad de formas, capacidades nominales y aplicaciones, en tamaños desde una fracción de caballo para un reloj eléctrico pequeño, hasta 3000 Hp, para suministrar energía a una planta siderúrgica.
Los motores síncronos están diseñados solamente para operar en C-A; su velocidad es constante y no cambia con las cargas variables. El principio de funcionamiento consiste en que el rotor, que contiene polos salientes, gira en concordancia con el campo magnético en rotación. El rotor tiende a fijarse, a estabilizarse con el campo magnético en rotación y se mantiene en constante rotación sin que lo interrumpan las cargas variables. Algunos rotores de este tipo de motor necesitan ser activados con C-C. Otros más no necesitan de esta excitación. La excitación del rotor forma polos definidos en el rotor que se armonizan con el campo magnético en rotación.
FIGURA 35. Conjunto de rotor y estator de un motor síncrono ordinario
44
Figura 36. Esquema motor síncrono
Los motores síncronos se diseñan para dos factores de potencia estándares; unitario y del 80% con corriente adelantada. Los motores de f.p igual a la unidad, a plena carga y con intensidad de excitación normal, trabajan con f.p del 100% o sea con tensión e intensidad en fase. Con carga menor que la normal, el f.p es inferior a 100% corriente adelantada, pero puede regularse ajustando la excitación.
45
Motor Repulsión – Inducción
Este tipo de motor esta construido de forma similar al de C-C ya que tiene escobillas y con conmutador. Entre los motores de conmutador figuran los motores de repulsión y los de serie de C-A. En este tipo de motor las escobillas están conectadas en corto y arranca por la repulsión magnética – inducción magnética.
Este tipo de motor difiere del de arranque por repulsión y marcha por inducción en que no tiene mecanismo centrífugo de interrupción, dispositivo de corto circuito ni sistema de levantamiento de escobillas. Arrancando como un motor ordinario de repulsión, combina luego los efectos de repulsión e inducción durante la marcha. Además del devanado regular su rotor cuenta con una jaula de ardilla, como puede verse en el esquema; ambos devanados están en las mismas ranuras, y la jaula, aunque es inactiva en el instante de arranque, desarrolla un par gradualmente creciente a medida que aumenta la velocidad. Cuando se alcanza la velocidad normal ambos devanados llevan carga. otra ventaja de la jaula de ardilla está en su acción reguladora de la velocidad, teniendo este efecto a mantener constante la velocidad con carga variable.
Este motor desarrolla un par de arranque 4.5 veces el normal de plena carga con una intensidad de corriente 3.5 veces la normal. Se utiliza en compresores de aire, bombas, parrillas mecánicas, montacargas, transportadores, máquinas herramientas. En general donde se requiera alto par de arranque y velocidad constante de trabajo. Sus averías principales son: en el conmutador, escobillas, portaescobillas, cojinetes, aislamiento; circuitos abiertos, contactos a tierra.
Figura 37. Esquema motor repulsión - inducción
46

Este motor es único, ya que su rotor combina una disposición de jaula de ardilla y un devanado de tambor con un conmutador y escobillas en corto circuito. Cuando se aplica potencia monofásica de C-A, el devanado de tambor produce el par de arranque por repulsión magnética. Al girar la armadura, también se produce par en el devanado de jaula de ardilla. El par se suma al producido por repulsión. Como resultado, sin carga, la velocidad a que funciona es ligeramente superior a la velocidad sincronía, debido al efecto del devanado de repulsión, en tanto que a plena carga, su velocidad es ligeramente inferior a la sincrónica, igual que en el motor de inducción. Conviene hacer notar que ambos devanados siempre están funcionando cuando gira la armadura. El motor repulsión – inducción, no tiene mecanismos de corto circuito o para desconectar escobillas. También puede invertirse cambiando la posición de las escobillas con respecto al plano neutro.
Figura 38. Esquema motor repulsión - inducción
47

Motor Universal (CA – CC)
Los motores universales son motores con conexión del rotor y estator en serie de potencia fraccionaria y diseñados para usarse en alimentación de C-A ó C-C.
Este motor funciona por interacción de los campos magnéticos entre el rotor y el estator, se utiliza donde no se requiera una velocidad constante como en: taladros, licuadoras, batidoras, maquinas de coser, aspiradoras.
Características:
Funcionamiento con C-C y C-A
- Velocidad variable- Alto par de arranque
- Alta velocidad
- Alta potencia
- Reversibilidad
Cuenta con un rotor devanado con escobillas y conmutador. Estos motores tienen la misma característica de velocidad y par cuando funcionan en C-C ó C-A. debido a que la mayor parte de las piezas están construidas de laminas empaquetadas ó laminaciones para impedir un calentamiento indebido. En algunos casos se utiliza devanado compensador ó auxiliar para mejorar el funcionamiento y reducir el chispeo en el conmutador.
Figura 39. Diagrama motor universal
48

Figura 40. Partes de un motor universal
49
COMPARACIÓN DE LAS CARACTERÍSTICAS DE LOS MOTORES DE CA Y CD
Resumen
Como los motores de CA continúan siendo usados en aplicaciones que tradicionalmente se emplean los motores de CD, es apropiado mencionar algunas de las características que presentan estos motores, tales como: construcción típica, fuerza de torsión, circuitos equivalentes, rangos de carga y velocidad, etc.
Esta comparación también resaltará algunas de las ventajas y desventajas de cada tipo de motor en aplicaciones con velocidad variable. Además, se podrá observar que los motores de CD se han venido sustituyendo por motores de CA en aplicaciones donde se requiere trabajos con velocidad variable, por lo que es necesario comprender los motores de CA, de tal manera que podamos optimizarlos en este tipo de aplicaciones.
Introducción
En esta sesión se presentan comparaciones específicas de las características individuales de los motores de CA y CD, basadas en el tipo de tecnología (leyes físicas) en comparación con las históricas (estandarización, aplicaciones, etc.). La base de comparación será un motor de CD, 4 polos con campos excitados individualmente, contra un motor de inducción CA, 4 polos, 3 fases y tipo jaula de ardilla.
Construcción
Rápidamente miremos algunas de las construcciones básicas de los motores de la CA y CD. Usted verá, que algunas generalidades pueden aplicarse con respecto a diferencias en la construcción, sin embargo hay muchas excepciones, mientras que muchos de los motores de CA utilizan un marco del hierro fundido, con bases de montaje integradas al marco (Figura 41), también existen motores de CA con bases de sujeción montadas en la carcaza (Figura 42).
50

Figura 41. Motor de CA con base integrada al marco del hierro fundido
Figura 42. Motor de CA con bases de sujeción integradas a la carcaza
De la misma manera, mientras que muchos motores de la CD tienen las bases de montaje como parte de la carcaza (Figura 45), otros utilizan bases integradas al marco del motor (Figura 46).
Figura 45. Motor de CD con bases integradas a la carcaza
Figura 46. Motor de CD con bases integradas al marco
51

Con la proliferación de las fuentes de energía estáticas para controlar motores de CD, la construcción del marco laminado (Figura 47) llegó a ser popular. Los motores de CA utilizan fuentes electrónicas de energía, por lo que la construcción del marco laminado (Figura 48) es considerado para el creciente uso de motores de CA (especialmente para usos con variadores de velocidad).
Figura 47. Motor de CD que utiliza un marco laminado
Figura 48. Motor de CD que utiliza un marco laminado
52
Terminología
Cada uno de los términos indicados en la sección de motores eléctricos se referirán a piezas o partes de los motores indicados en las Figuras 49-50.
Figura 49. Componentes del Motor de CA Figura 50. Componentes del Motor de CA
Figura 51. Componentes del Motor de CD Figura 52. Componentes del Motor de CD
53
Generador Eléctrico
Un generador eléctrico es una máquina eléctrica rotativa que transforma la energía mecánica en energía eléctrica, un generador produce electricidad por la rotación de un grupo de conductores dentro de un campo magnético. La energía mecánica que entra puede provenir de motores de combustión interna, turbinas de vapor, reactores ó motores eléctricos. A la salida del generador se obtiene una FEM que se induce en los conductores cuando estos se mueven a través del campo magnético.
Cuando un conductor, como por ejemplo un cable metálico, se mueve a través del espacio libre entre los dos polos de un imán, los electrones del cable, con carga negativa, experimentan una fuerza a lo largo de él y se acumulan en uno de sus extremos, dejando en el otro extremo núcleos atómicos con carga positiva, parcialmente despojados de electrones. Esto crea una diferencia de potencial, o voltaje, entre los dos extremos del cable; si estos extremos se conectan con un conductor, fluirá una corriente alrededor del circuito. Éste es el principio que da base a los generadores eléctricos rotatorios, en los que un bucle de hilo conductor gira dentro de un campo magnético para producir un voltaje y generar una corriente en un circuito cerrado.
54

Figura 52. Generador típico
Autoinducción
Cuando varía la corriente de un conductor, el campo magnético resultante varía a lo ancho del propio conductor e induce en él un voltaje. Este voltaje autoinducido se opone al voltaje aplicado y tiende a limitar o invertir el voltaje original. La autoinducción eléctrica es, por lo tanto, análoga a la inercia mecánica. Una bobina de inductancia, o estrangulador, tiende a suavizar la corriente variante, de la misma forma que un volante suaviza la rotación de un motor. La cantidad de autoinducción de una bobina, su inductancia, se mide por una unidad eléctrica denominada henrio, en honor al físico estadounidense Joseph Henry, quien descubrió el efecto. La auto inductancia es independiente del voltaje o la intensidad de corriente. Está determinada por la geometría de la bobina y las propiedades magnéticas del núcleo.
Inducción Electromagnética
La inducción electromagnética es la producción de corrientes eléctricas por medio de campos magnéticos variables con el tiempo. Desde entonces el fenómeno consiste en
55
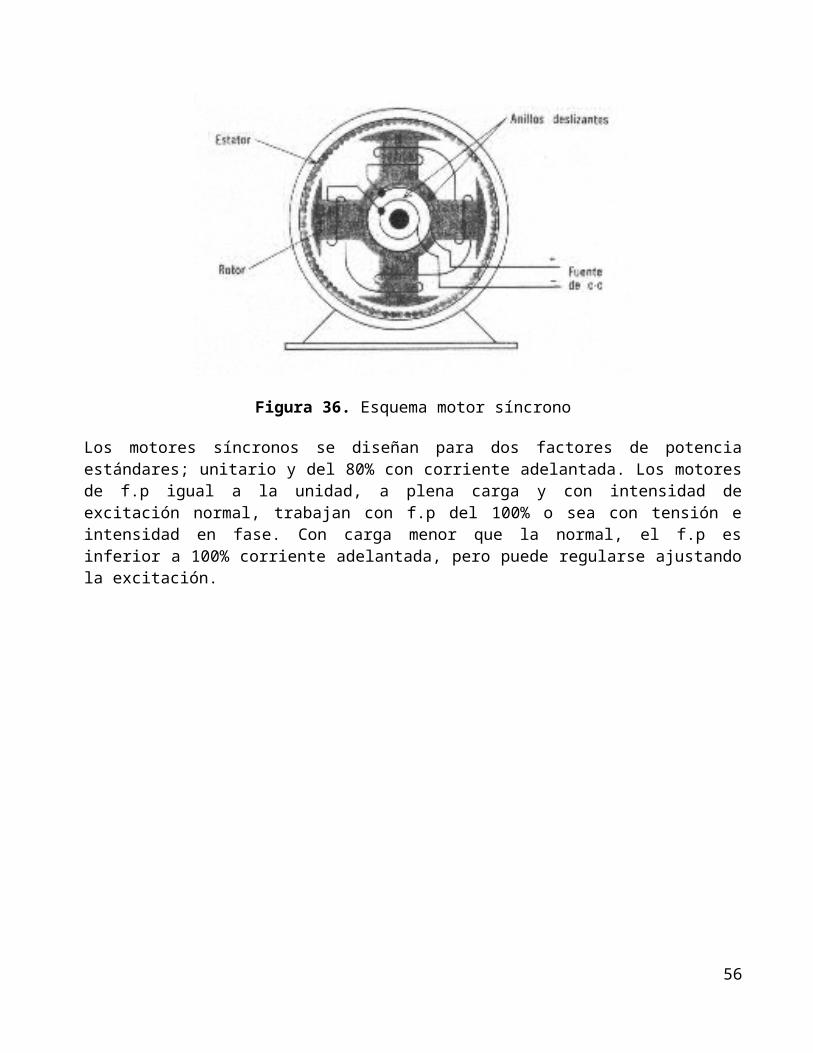
generar campos eléctricos a partir de campos magnéticos, se denomina entonces inducción electromagnética.
Una manifestación común del electromagnetismo es el hecho de que una corriente, al circular por un conductor, origina un campo magnético; este es el principio de funcionamiento del electroimán. Cuando un imán se mueve cerca de un conductor eléctrico, son inducidas en este, corrientes turbulentas y el conductor es empujado por una fuerza de arrastre, esta fuerza se puede aprovechar para generar una corriente eléctrica.
Esto significa que siempre que circule corriente eléctrica por un conductor, se genera a su alrededor un campo magnético, si el conductor esta arrollado en forma de bobina, el campo magnético se concentra en el interior de la bobina. Si se mueve un campo magnético cerca de un conductor, se inducirá en este una corriente eléctrica. Entre más rápido sea el movimiento, mayor será la corriente generada.
Un electroimán esta constituido por muchas espiras de hilo conductor. Cuando circula la corriente en el arrollamiento electromagnético se crea un fuerte campo magnético. Los dos extremos de las piezas son alternativamente los polos norte y sur.
Figura 53. Principio de inducción electromagnética
Principio de Funcionamiento
56
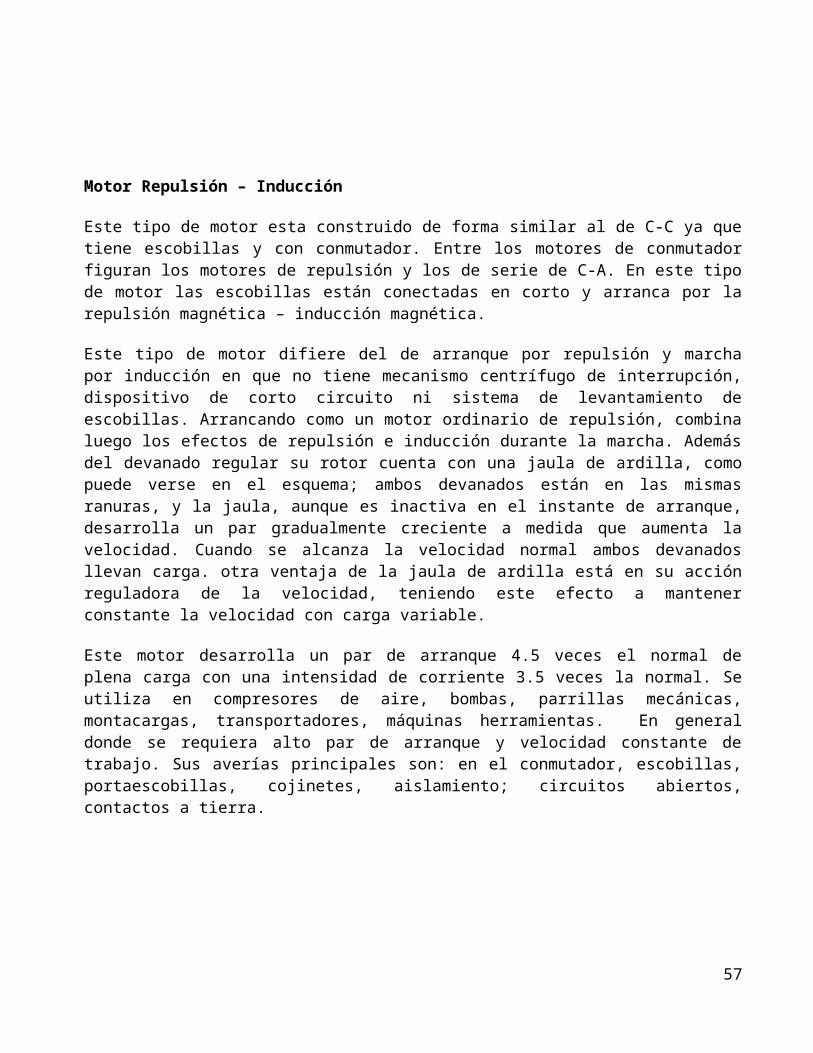
Siempre que exista un movimiento rotativo entre un campo magnético estacionario y un conductor devanado en una armadura, la dirección del movimiento será tal que el conductor corte líneas de flujo del campo magnético; así que se tendrá una FEM inducida. La magnitud de la FEM depende de la intensidad del campo magnético y de la rapidez con que se corten las líneas de flujo.
Clasificación
Generadores de C-A
- Monofásicos, Bifásicos, Trifásicos
Generadores de C-C
- Serie, Derivación , Combinados
Generadores de C-C
Si una armadura gira entre dos polos magnéticos fijos, la corriente en la armadura circula en un sentido durante la mitad de cada revolución, y en el otro sentido durante la otra mitad. Para producir un flujo constante de corriente en un sentido, o corriente continua, en un aparato determinado, es necesario disponer de un medio para invertir el flujo de corriente fuera del generador una vez durante cada revolución. En las máquinas antiguas esta inversión se llevaba a cabo mediante un conmutador, un anillo de metal partido montado sobre el eje de una armadura. Las dos mitades del anillo se aislaban entre sí y servían como bornes de la bobina. Las escobillas fijas de metal o de carbón se mantenían en contacto con el conmutador, que al girar conectaba eléctricamente la bobina a los cables externos. Cuando la armadura giraba, cada escobilla estaba en contacto de forma alternativa con las mitades del conmutador, cambiando la posición en el momento en el que la corriente invertía su sentido dentro de la bobina de la armadura. Así se producía un flujo de corriente de un sentido en el circuito exterior al que el generador estaba conectado. Los generadores de corriente continua funcionan normalmente a voltajes bastante bajos para evitar las chispas que se producen entre las escobillas y el conmutador a voltajes altos. El potencial más alto desarrollado para este tipo de generadores suele ser de 1.500 voltios. En algunas máquinas más modernas esta inversión se realiza usando aparatos de potencia electrónica, como por ejemplo rectificadores de diodo.
Los generadores modernos de corriente continua utilizan armaduras de tambor, que suelen estar formadas por un gran número de bobinas agrupadas en hendiduras longitudinales dentro del núcleo de la armadura y conectadas a los segmentos adecuados de un conmutador múltiple. Si una armadura tiene un solo circuito de cable, la corriente que se produce aumentará y disminuirá dependiendo de la parte del campo magnético a través del
57
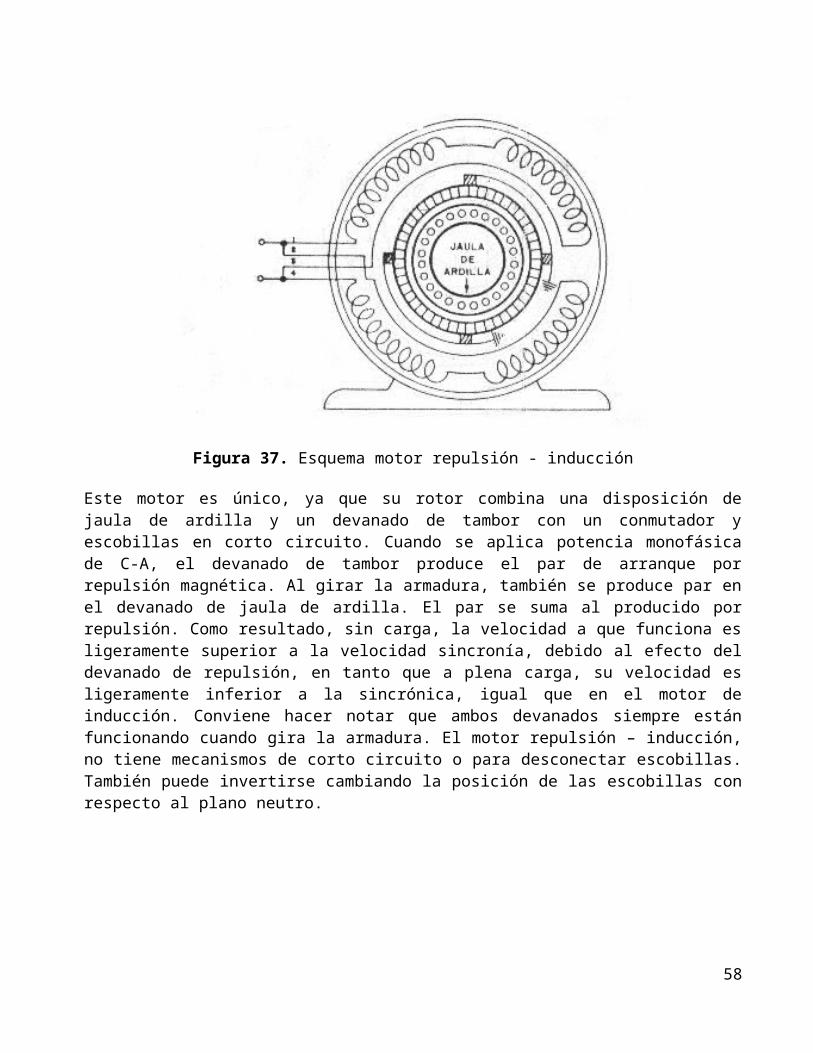
cual se esté moviendo el circuito. Un conmutador de varios segmentos usado con una armadura de tambor conecta siempre el circuito externo a uno de cable que se mueve a través de un área de alta intensidad del campo, y como resultado la corriente que suministran las bobinas de la armadura es prácticamente constante. Los campos de los generadores modernos se equipan con cuatro o más polos electromagnéticos que aumentan el tamaño y la resistencia del campo magnético. En algunos casos, se añaden interpolos más pequeños para compensar las distorsiones que causa el efecto magnético de la armadura en el flujo eléctrico del campo.
El campo inductor de un generador se puede obtener mediante un imán permanente (magneto) o por medio de un electroimán (dinamo). En este último caso, el electroimán se excita por una corriente independiente o por autoexcitación, es decir, la propia corriente producida en la dinamo sirve para crear el campo magnético en las bobinas del inductor. Existen tres tipos de dinamo según sea la forma en que estén acoplados el inductor y el inducido: en serie, en derivación y en combinación.
Para los generadores, el plano neutro es el punto en que las bobinas de armadura no cortan líneas de flujo y por lo tanto no hay voltaje inducido en ellas.
Generador Serie:
En un generador en serie, el devanado de campo está conectado en serie con la salida del generador, por lo tanto la misma corriente que fluye por la carga fluye a través del devanado de campo.
Cuando el devanado de campo de un generador autoexcitado se conecta en serie con la salida del generador, a éste se le llama generador en serie. La corriente de excitación que atraviesa el devanado de campo de este generador es igual a la que el generador transmite a la carga. si la carga tiene alta resistencia y, en consecuencia, toma sólo una pequeña corriente del generador, la corriente de excitación también es pequeña, lo cual significa que el campo magnético del devanado de campo es débil de modo que disminuye el voltaje de salida del generador. En forma similar, si la carga toma una corriente elevada, la corriente de excitación también es grande, el campo magnético magnético del devanado de campo es intenso y el voltaje de salida del generador. Por lo tanto se dice que un generador en serie tiene mala regulación de voltaje y, como resultado, los generadores en serie no son convenientes para cargas fluctuantes.
58
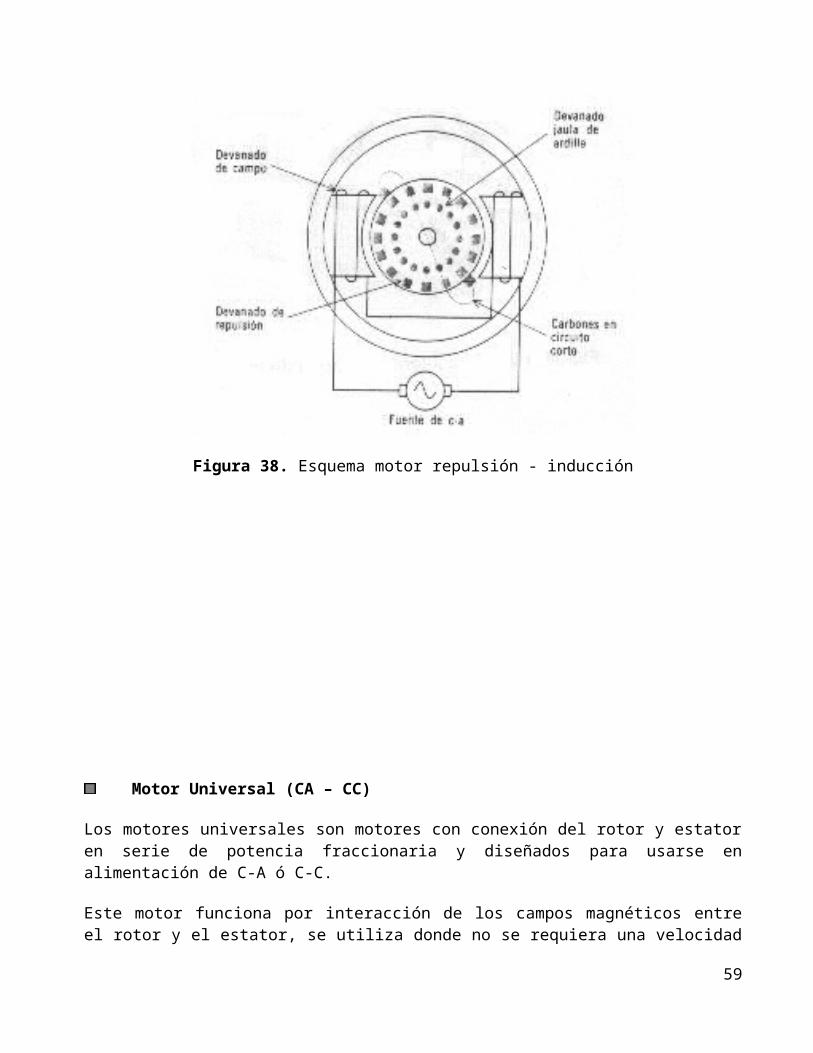
Figura 54. Diagrama generador serie
Generador Derivación:
En un generador derivación, el devanado de campo está conectado en paralelo con la salida del generador, o en sus terminales. Por lo tanto, la corriente de excitación depende del valor del voltaje de salida y de la resistencia del devanado.
Cuando el devanado de campo de un generador autoexcitado está conectado en paralelo con la salida del generador, a éste se le llama generador con derivación. El valor de la corriente de excitación en un generador con derivación, depende del voltaje de salida y la resistencia del devanado de campo. Generalmente la corriente de excitación se mantiene en un valor entre 0.5 y 5% de la corriente total producida. El voltaje de salida de un generador con derivación que funciona a velocidad constante en condiciones variables de carga es mucho más estable que el voltaje de salida de un generador en serie. Sin embargo, sigue ocurriendo cierto cambio en el voltaje de salida. Este cambio ocurre porque, cuando la corriente de carga aumenta, la caída de voltaje (IR) en la bobina de armadura aumenta y esto hace que disminuya el voltaje de salida. Como resultado, la corriente en el devanado de campo disminuye y se reduce el campo magnético, con lo cual el voltaje de salida disminuye aún más. Si la corriente que toma la carga es mucho mayor que aquella para la cual se
59

diseño el generador con derivación, la caída del voltaje de salida es extrema. Sin embargo, para cambios de corriente de carga dentro del rango planeado, la caída del voltaje de salida con aumentos de carga, no es demasiado grande.
Figura 55. Diagrama generador derivación
Generador Combinado:
Un generador combinado tiene devanado de campo tanto en serie como en derivación. Tanto los generadores en serie como los derivación, tienen la desventaja de que, cuando la corriente varía de cero a carga normal, hacen que su voltaje de salida también cambie. En un generador serie, los aumentos en la corriente de carga originan aumentos en el voltaje de salida; pero cuando se trata de un generador derivación, los aumentos de la corriente de carga originan la disminución del voltaje de salida.
Los dos devanados del generador combinado están diseñados de tal manera que sus campos magnéticos se ayudan. Así pues, cuando la corriente de carga aumenta, la corriente que pasa por el devanado de campo en derivación disminuye, reduciendo la intensidad de su campo magnético. Pero el mismo aumento en la corriente de carga ocurre en el devanado de campo en serie, aumentando la intensidad de su campo magnético. Cuando hay el número adecuado de espiras en el devanado en serie, el aumento de intensidad de su campo magnético compensará la disminución de intensidad del campo magnético del devanado en derivación. Por lo tanto, la intensidad total del campo magnético combinado, permanece casi invariable, de manera que el voltaje de salida se conserva constante.
60
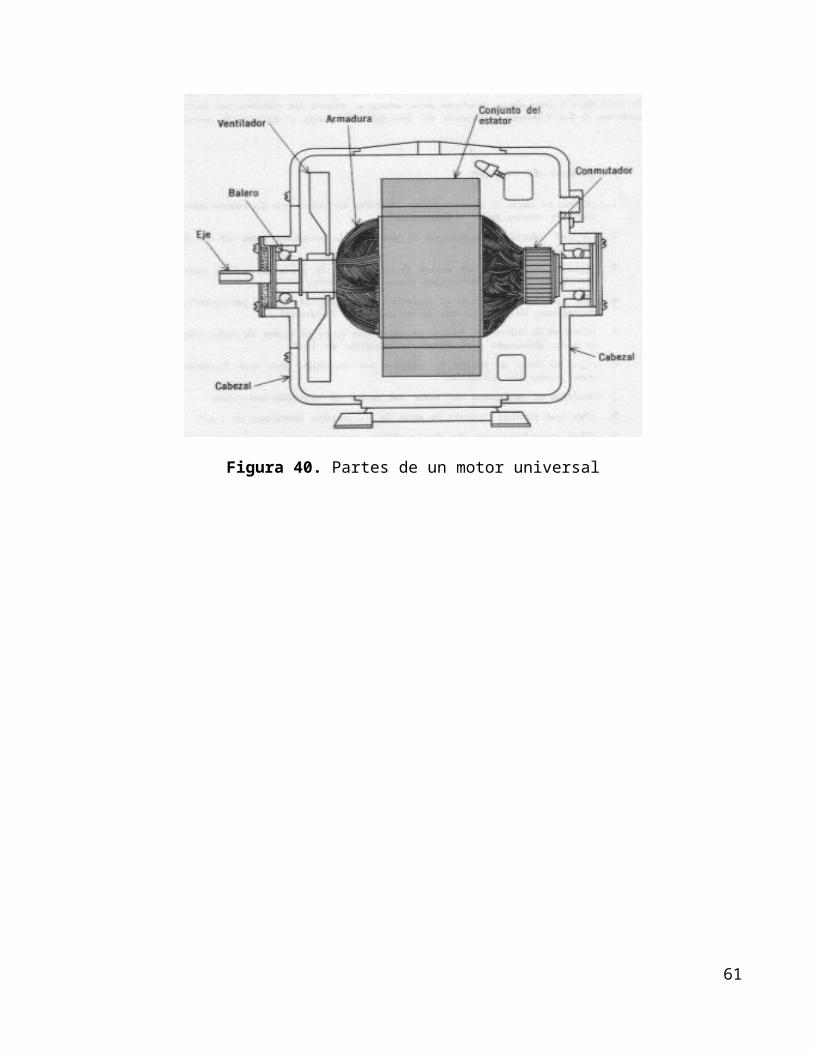
Figura 56. Diagrama generador combinado
Regulación de un Generador:
La regulación es el proceso de mantener constante la salida en un generador, esto se logra por medio de un dispositivo o circuito sensible a la salida del generador, el cual controla la corriente en el devanado de campo para compensar los cambios en la salida. Las dos causas principales de cambio o inestabilidad en la salida de un generador son los cambios en la resistencia de la carga y los cambios en la velocidad de rotación del generador.
El voltaje de salida de generadores con derivación y combinados impulsados a velocidades constantes no varían mucho si las variaciones de carga se encuentran dentro del rango de diseño del generador. Como resultado, solo se tiene regulación para estos generadores cuando se desea una salida muy estable o cuando las variaciones de carga son muy grandes. Por otra parte los generadores de velocidad variable requieren generalmente de regulación.
61

Figura 57. Diagramas de regulación de voltaje en generadores
El regulador de voltaje funciona por medio de contactos que en forma intermitente, añaden una resistencia en serie con el devanado de campo.
El regulador de corriente, como el de voltaje funciona a base de añadir en forma intermitente una resistencia en serie con el devanado de campo. En el regulador de corriente, la conexión de la resistencia está controlada por la corriente de carga, en tanto que en el regulador de voltaje está controlada por el voltaje de salida.
62

Figura 58. Diagrama de regulación de corriente en generadores
El objeto de regular la corriente de salida de un generador es evitar que la corriente exceda el valor máximo que el generador puede transmitir sin peligro.
Devandos Imbrincados
Los devanados imbrincados se llaman así a causa de los diagramas de devanado, que representan las conexiones entre las bobinas de armadura y los segmentos del conmutador. En estos diagramas, cada bobina de un debanado imbrincado se encima sobre la bobina anterior. Los dos extremos de cualquier bobina en un devanado imbrincado están
63

conectados a segmentos adyacentes en el conmutador y cada uno de ellos conecta los extremos de dos bobinas adyacentes.
Figura 59. Esquema de devanado imbrincado
Devanados Ondulados
En un devanado ondulado, los dos extremos de la bobina de armadura no se conectan a segmentos adyacentes de conmutador, como ocurre con los devanados imbrincados. En lugar de ello, el extremo de cada bobina se conecta a un segmento que se encuentra a una
64
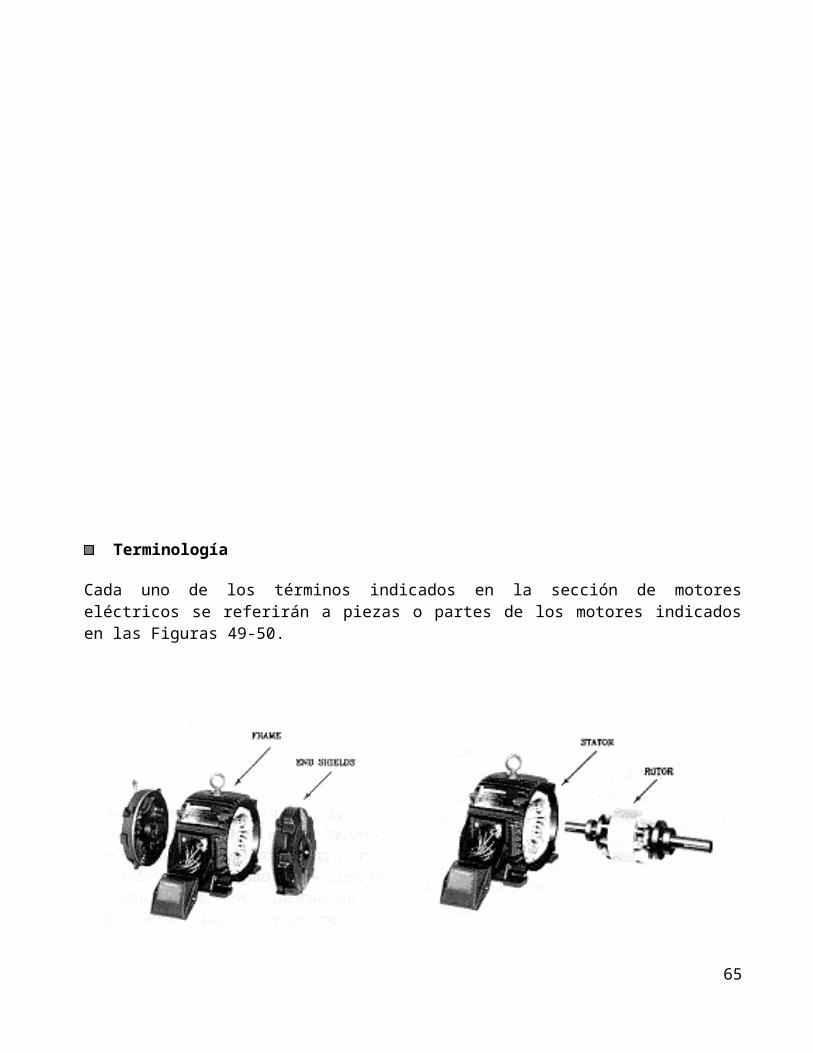
distancia de dos veces la que hay entre los polos del segmento al cual se conectó el otro extremo de la bobina; también en este caso, cada segmento de conmutador se conecta a los extremos de dos bobinas diferentes; pero las bobinas están en los lados opuestos de la armadura.
Figura 60. Esquema de devanado ondulado
Generadores de C-A
Como se decía antes, un generador simple sin conmutador producirá una corriente eléctrica que cambia de sentido a medida que gira la armadura. Este tipo de corriente alterna es
65

ventajosa para la transmisión de potencia eléctrica, por lo que la mayoría de los generadores eléctricos son de este tipo. En su forma más simple, un generador de corriente alterna se diferencia de uno de corriente continua en sólo dos aspectos: los extremos de la bobina de su armadura están sacados a los anillos colectores sólidos sin segmentos del árbol del generador en lugar de los conmutadores, y las bobinas de campo se excitan mediante una fuente externa de corriente continua más que con el generador en sí. Los generadores de corriente alterna de baja velocidad se fabrican con hasta 100 polos, para mejorar su eficiencia y para lograr con más facilidad la frecuencia deseada. Los alternadores accionados por turbinas de alta velocidad, sin embargo, son a menudo máquinas de dos polos. La frecuencia de la corriente que suministra un generador de corriente alterna es igual a la mitad del producto del número de polos por el número de revoluciones por segundo de la armadura.
A veces, es preferible generar un voltaje tan alto como sea posible. Las armaduras rotatorias no son prácticas en este tipo de aplicaciones, debido a que pueden producirse chispas entre las escobillas y los anillos colectores, y a que pueden producirse fallos mecánicos que podrían causar cortocircuitos. Por tanto, los alternadores se construyen con una armadura fija en la que gira un rotor compuesto de un número de imanes de campo. El principio de funcionamiento es el mismo que el del generador de corriente alterna descrito con anterioridad, excepto en que el campo magnético (en lugar de los conductores de la armadura) está en movimiento.
La corriente que se genera mediante los alternadores descritos más arriba aumenta hasta un pico, cae hasta cero, desciende hasta un pico negativo y sube otra vez a cero varias veces por segundo, dependiendo de la frecuencia para la que esté diseñada la máquina. Este tipo de corriente se conoce como corriente alterna monofásica. Sin embargo, si la armadura la componen dos bobinas, montadas a 90º una de otra, y con conexiones externas separadas, se producirán dos ondas de corriente, una de las cuales estará en su máximo cuando la otra sea cero. Este tipo de corriente se denomina corriente alterna bifásica. Si se agrupan tres bobinas de armadura en ángulos de 120º, se producirá corriente en forma de onda triple, conocida como corriente alterna trifásica. Se puede obtener un número mayor de fases incrementando el número de bobinas en la armadura, pero en la práctica de la ingeniería eléctrica moderna se usa sobre todo la corriente alterna trifásica, con el alternador trifásico, que es la máquina dinamoeléctrica que se emplea normalmente para generar potencia eléctrica.
Generador Monofásico
66

Este generador tiene sus bobinas de armadura conectadas en serie, tiene una salida única. La salida es sinusoidal y en cualquier instante es igual en amplitud a la suma de voltajes inducidos en cada una de las bobinas. Todas las bobinas conectadas en serie constituyen el devanado de armadura. En la práctica, muy pocos generadores de c-a son monofásicos, ya que puede obtenerse una mayor eficiencia conectando las bobinas de armadura mediantre otro sistema.
Figura 61. Una simple espira girando en un campo magnético es un generador monofásico, ya que sólo tiene un voltaje de salida.
Generador Bifásico
67

En este generador, las bobinas de armadura están devanadas de manera que el generador tenga dos voltajes de salida separados que difieren en fase, por 90o grados. Un generador simple bifásico de espira rotatoria consta de dos espiras perpendiculares entre sí; cada espira está conectada a su propio juego de anillos rozantes. Cuando el voltaje inducido en una espira es máximo, el voltaje en la otra es cero y viceversa. Por lo tanto, los voltajes obtenidos en los anillos rozantes difieren 90 grados en fase.
Figura 62. Las bobinas de armadura de un generador bifásico real con una armadura estacionaria se dividen en dos devanados monofásicos, espaciando cada bobina de los dos
devanados de manera que los voltajes inducidos en ambos estén defasados 90 grados.
Figura 63. Defasamiento entre fases
Generador Trifásico
68

Los principios del generador, son los mismos que los de un bifásico, excepto que se tienen tres devanados espaciados igualmente y tres voltajes de salida defasados 120 grados entre sí.
Figura 64. El generador trifásico produce tres voltajes iguales defasados 120o, con tres pares de anillos rozantes para cada voltaje de salida.
Como se sabe existen seis puntas que salen de los devanados de armadura de un generador trifásico y el voltaje de salida está conectado a la carga externa por medio de estas seis puntas. En la práctica, esto no sucede así, en lugar de ello, se conectan los devanados entre sí y solo salen tres puntas que se conectan a la carga.
Figura 65. Existen dos maneras en las que se pueden conectar las terminales de cada devanado, delta y estrella.
69

INSTALACIÓN, PROTECCIÓN, OPERACIÓN Y MANTENIMIENTO DE MOTORES ELÉCTRICOS
Introducción
Al invertir en maquinaria nueva, se espera un buen rendimiento. Esto se logra seleccionando el equipo adecuado y correctamente dimensionado para cada servicio especifico: Los motores eléctricos deben instalarse de tal manera que sean fácilmente accesibles para inspección y mantenimiento.
Hay que proteger el equipo lo mejor posible contra la influencia peligrosa de agua, aceite, polvo y elementos contaminantes.
Esta sección contiene los procedimientos de índole general que son aplicables a los motores de Inducción.
Antes de instalar, operar o efectuar mantenimiento en el equipo, familiarícese con lo siguiente:
Normas de seguridad para la Instalación y uso de motores eléctricos.
Código Eléctrico Nacional.
Códigos y métodos locales.
Avisos de Seguridad
Se sugiere leer y entender los manuales de instalación, operación y mantenimiento que prevé el fabricante del equipo, y no pase desapercibidos los avisos de “Advertencia” y “Cuidado”. Generalmente, un aviso de “Advertencia” indica una condición posiblemente insegura que podría causar lesiones a personas, mientras que un aviso de “Cuidado” indica una condición que podría ocasionar daños a equipos.
70
Advertencias
Verificar a que tensión opera el equipo.
No tocar ninguna conexión eléctrica sin antes asegurarse que se ha desconectado la alimentación de potencia.
Antes de conectar la alimentación, asegúrese que el sistema está debidamente puesto a tierra. Es preciso cumplir cuidadosamente con lo indicado en el Código Eléctrico Nacional y los códigos locales.
Evite exponerse durante un tiempo prolongado a máquinas con alto nivel de ruido. Asegúrese de usar dispositivos de protección para los oídos de modo de reducir los efectos auditivos perjudiciales.
Verificar que el motor no esté conectado a otras máquinas que tengan piezas rotativas o piezas accionadas por el mismo.
No pase por alto ni desactive dispositivos protectores ni guardas de seguridad.
Evite usar dispositivos de reposición automática sí la reiniciación automática del motor poner en peligro a personas o equipos.
Asegúrese que la carga está debidamente acoplada al eje (flecha) del motor antes de alimentar potencia.
Tenga sumo cuidado y use procedimientos seguros durante el manejo, levantamiento, instalación, operación y mantenimiento del equipo.
Antes de hacer mantenimiento en el motor, asegúrese que el equipo conectado al eje del motor no pueda causar rotación del eje. Si la carga podría producir rotación del eje, desconecte la carga del eje del motor antes de efectuar el mantenimiento.
Antes de desarmar el motor, desconecte completamente la alimentación de electricidad de los devanados del motor y los dispositivos accesorios.
Verificar que la aplicación de los motores sea realmente para las condiciones que fueron diseñados: exposición al polvo, vapores inflamables o combustibles, condiciones de operación a prueba de explosión, etc.
Los motores que se utilicen en atmósferas inflamables y/o explosivas deberán incluir el rótulo UL correspondiente en la placa de fábrica.
Cerciorarse de que las condiciones de servicio específicas se encuentre dentro del rango de valores establecidos en el Código Eléctrico Nacional.
71

Cuidados
Para evitar los daños o la falla prematura del equipo, el mantenimiento deberá ser realizado únicamente por personal de mantenimiento calificado.
No levantar el motor y su carga accionada usando los herrajes para alzar el motor.
Si se usan pernos de ojo para levantar el motor, asegúrese que están bien apretados y verificar en el manual cuál es el ángulo máximo de la dirección de levantamiento a fin de no dañar el motor.
Para evitar que se dañe el equipo, asegúrese que el servicio eléctrico no exceda el amperaje nominal máximos del motor indicado en su placa.
Recepción
Generalmente, los motores son probados minuciosamente en fábrica y empacados cuidadosamente para su transporte. Al recibir su motor, usted deberá hacer de inmediato lo siguiente:
1. Evalúe las condiciones del cajón de transporte y, si se observan daños, informe cuanto antes a la empresa que transportó el motor.
2. Verifique si el número de parte del motor que recibió es el mismo que el número de parte indicado en su orden de compra.
72

Almacenamiento
Si el motor no será puesto inmediatamente en servicio, se deberá almacenar en un lugar limpio, seco y tibio. Para evitar que el motor resulte dañado durante el almacenamiento, es preciso tomar varios pasos preventivos.
a) Use periódicamente un “Megger” (megóhmetro) para asegurar que se mantiene la integridad del aislamiento de los devanados. Registre las lecturas del Megger. Cualquier caída significativa en la resistencia del aislamiento deberá investigarse de inmediato.
b) No lubrique los cojinetes (chumaceras) durante el almacenamiento. Los cojinetes del motor son llenados de grasa en la fábrica. Un exceso de grasa puede deteriorar la calidad del aislamiento.
c) Haga girar el eje del motor 10 vueltas como mínimo cada dos meses durante el almacenamiento (de ser posible, con mayor frecuencia). Ello evitará los daños en los cojinetes resultantes del almacenamiento.
d) Si el lugar de almacenamiento está mojado o húmedo, los devanados del motor deberán ser protegidos contra la humedad. Ello puede hacerse alimentando potencia al calentador unitario del motor (si lo tiene) mientras el mismo está almacenado.
Desembalaje
Si no hay disponibles instalaciones para el resguardo del equipo, no lo saque del embalaje antes de estar listo para el uso. Si se piensa almacenar este equipo durante algún tiempo antes de la instalación, se recomienda que el área de almacenamiento esté seca, protegida y no esté sujeta a cambios extremos de humedad, suciedad y aceite excesivos ni condiciones adversas similares. Cada motor debe ser empacado de modo que se facilite su manejo e impida la entrada de contaminantes.
a) Para evitar la condensación dentro del motor, no desempaque el motor hasta que el mismo haya alcanzado temperatura ambiente (la temperatura ambiente en este caso es la temperatura de la sala donde será instalado).
b) Una vez que el motor alcance la temperatura ambiente, quite todo el material de envoltura protectora del motor.
Después del desembalaje y la inspección para comprobar que todas las partes hayan sido recibidas en buenas condiciones, gire el eje a mano para asegurarse que gire libremente.
73
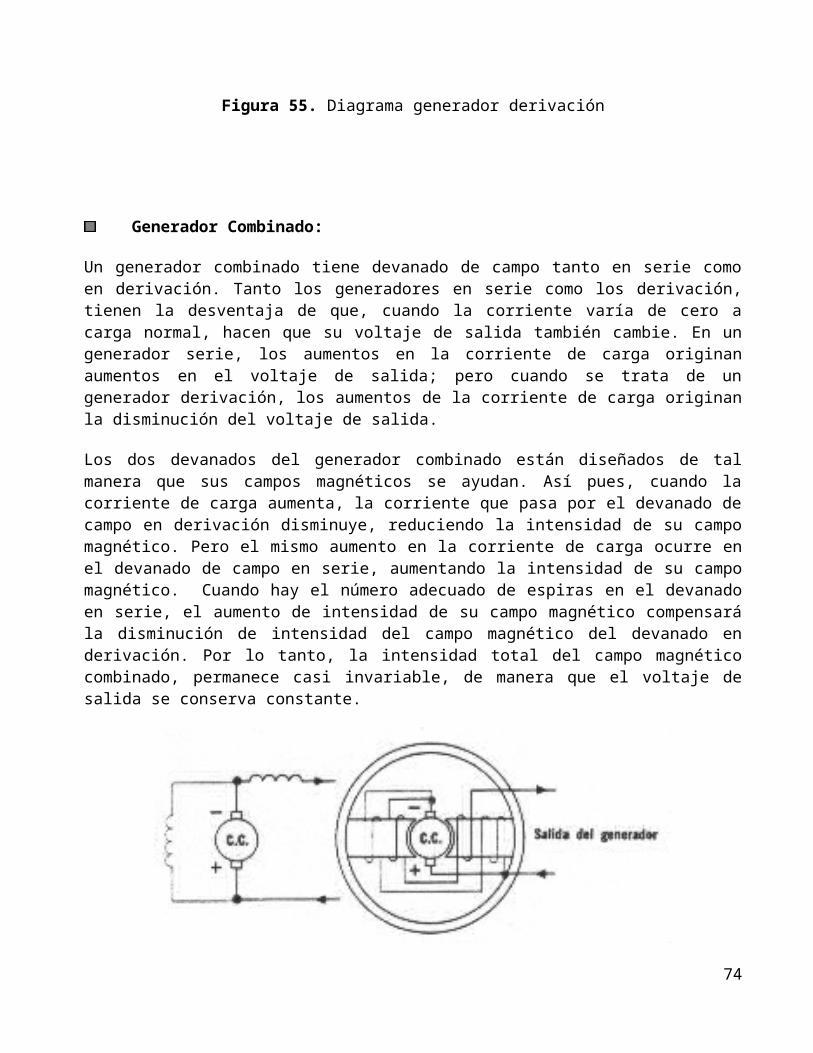
Manejo
El motor deberá levantarse utilizando las orejas para alzar [de izar] o los pernos de ojo suministrados.
a) Para levantar el motor, use las orejas o pernos de ojo provistos para ello. No trate de levantar a la vez el motor y los equipos adicionales conectados al mismo empleando este método.
b) Al levantar un motor a prueba de intemperie, no lo haga introduciendo orejas para alzar en los agujeros de la parte superior de la cubierta de enfriamiento.
c) Si el motor está montado en una plancha conjuntamente con el equipo accionado, por ejemplo una bomba, un compresor, etc., quizás no se pueda levantar el motor por sí mismo. En tal caso, el conjunto deberá levantarse colocando una eslinga alrededor de la base de montaje. El conjunto puede levantarse como unidad completa para ser instalado. No lo levante utilizando las orejas o pernos de ojo que vienen con el motor. Si la carga está desequilibrada (como cuando incluye acoplamientos o accesorios adicionales), será necesario usar otros elementos para evitar que se vuelque. En cualquier caso, antes de levantar la carga se la deberá asegurar debidamente.
Código Nacional Eléctrico
Las prácticas de cableado, los interruptores con conexión a tierra, selección de un arrancador y la protección contra la corriente excesiva tienen particular importancia, por lo que se sugiere que el usuario vele por el cumplimiento de las normatividad del Código Nacional Eléctrico y de cualquier otro Código Local aplicable.
74

Instalación de Motores
La instalación deberá hacerse en conformidad con el Código Eléctrico Nacional así como con códigos y métodos locales. Cuando se acoplen otros dispositivos al eje del motor, asegúrese de instalar dispositivos de protección para evitar futuros accidentes. Algunos dispositivos de protección son los acoplamientos, las guarda correas, guardacadenas, tapas de eje, etc. Los mismos protegen contra el contacto accidental con piezas en movimiento. La maquinaria accesible al personal deberá contar con protección adicional, como ser barandillas de guarda, pantallas, carteles de advertencia, etc.
Para la correcta instalación de los motores eléctricos bajo las mejores condiciones técnicas y de seguridad, es necesario tomar en cuenta un número tal de datos como: sistema y tipo de corriente, voltaje, frecuencia, tipo de motor, clase, etc. Ya que existen motores de C-A y C-D, fraccionarios y de gran potencia, monofásicos y trifásicos.
Los motores de hasta ½ Hp pueden conectarse directamente a la línea sin riesgo de dañarlos ó provocar perturbaciones en el sistema eléctrico. Cuando se tiene solo un motor por conectar, el circuito derivado correspondiente estará provisto de conductores eléctricos que tengan una capacidad de corriente como mínimo del 125% de la corriente de placa, corriente a plena carga ó corriente nominal.
Para la correcta instalación es importante conocer su dato de placa, para ver si es posible conectarlos en forma directa con solo un interruptor ó si hay necesidad de una protección adicional proporcionada a través de arrancadores, ya sean manuales ó automáticos. Es común encontrar motores eléctricos de 2 y hasta 3 Hp conectados en forma directa (con solo un interruptor), pero es recomendable conectar así motores fraccionarios de hasta 1/2 Hp y de esta potencia en adelante proveerlos de protección adicional (arrancadores, relevadores, termomagnéticos, cuchillas, etc.).
Como puede observarse, para la correcta protección de motores eléctricas, los elementos fusibles deben ser de una capacidad tal que soporten la corriente de arranque que es varias veces el valor de la corriente de placa ó corriente nominal, pero no mayor del 400% el valor de esta.
La capacidad de corriente de los elementos termomagnéticos, debe ser en promedio de 140% la corriente de placa del motor al cual deben proteger, es decir, los elementos térmicos son calculados en promedio para una corriente de 1.4 veces la corriente nominal. Para cuando se tienen varios motores, los conductores eléctricos alimentadores, se calculan por corriente y por caída de tensión, tomando como base que como máximo va a transportar el 125% de la corriente de motor de mayor potencia, más la corriente nominal de los demás motores y como mínimo la corriente de arranque del motor de mayor potencia.
75
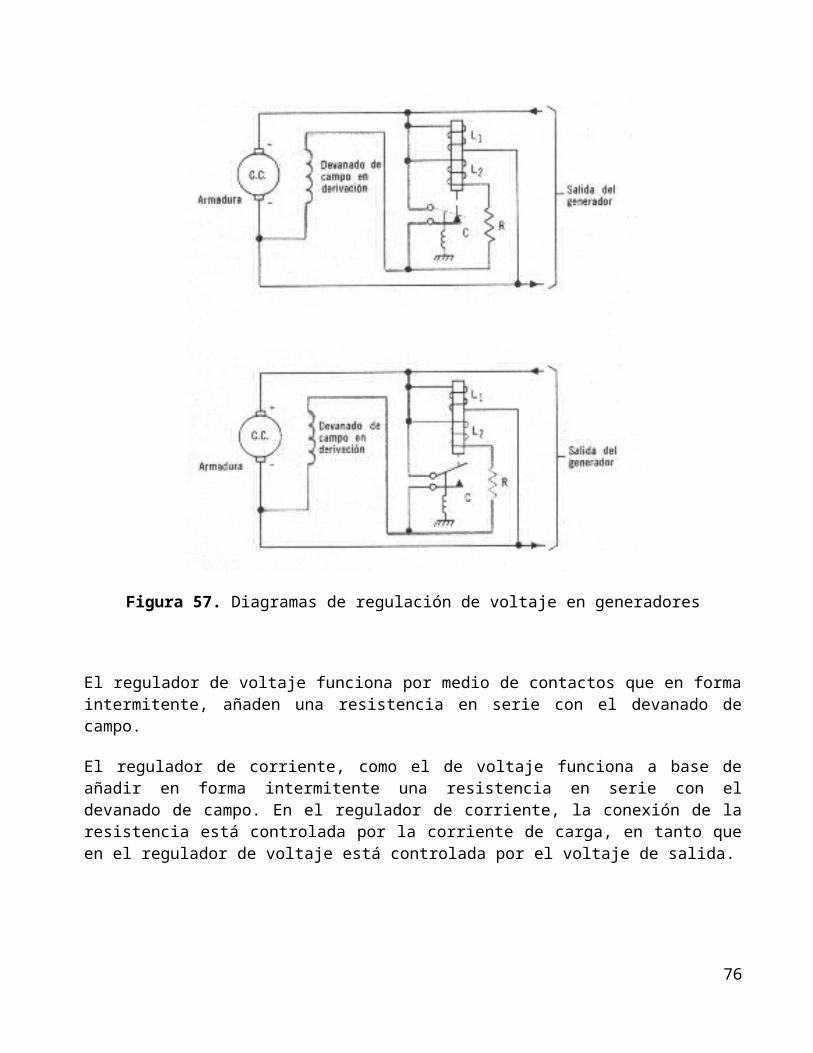
Procedimiento de Instalación de Motores Eléctricos
1.- Verificar los datos de placa del motor si son los correctos para la instalación existente.
2.- Evaluar el equipo de protección eléctrico de motores.
3.- Revisar la libertad del movimiento del eje del rotor y la cantidad de lubricante de los rodamientos.
4.- Inspeccionar la base ó cimentación firme y segura.
5.- Revisar las conexiones del conductor del motor y equipo de control.
6.- Revisar la tensión requerida de los elementos de la transmisión.
7.- Realizar una inspección de las condiciones a operar (Ubicación – Montaje)
8.- Aplicar la alimentación eléctrica y supervisar su correcto funcionamiento.
Ubicación
El motor deberá instalarse en un ambiente para el cual fue diseñado: exposición directa al sol, substancias corrosivas, líquidos o gases nocivos, polvo, a las partículas metálicas y a la vibración. La exposición de los mismos en ambientes para los cuales no fueron diseñados, puede reducir la vida útil y degradar el rendimiento del motor. Cerciorase de dejar espacio suficiente para ventilación y acceso para la limpieza, reparación, servicio e inspecciones. La ventilación es extremadamente importante. Asegúrese que el área de ventilación no se encuentre obstruida. Las obstrucciones limitan el paso libre del aire. Los motores se calientan y es preciso disipar el calor para evitar daños.
Montaje Mecánico
El motor deberá instalarse asegurándolo bien a una superficie de montaje o cimientos rígidos, de modo de minimizar la vibración y mantener el alineamiento entre el motor y la carga del eje. De no utilizarse una superficie de montaje adecuada, pueden experimentarse vibraciones, desalineamiento y daños a los cojinetes.
La base para el motor deberá ser plana y de ser posible, libre de vibraciones, de manera que un cimiento de concreto es recomendable. Deben utilizarse pernos de cimentación o una placa base. Para transmisiones por banda; el motor debe ser montado sobre rieles tensores para poder ajustar la tensión de la banda.
La mayoría de los motores pueden montarse en todas las posiciones. En todos los casos debe procurarse que los agujeros de drenaje estén correctamente colocados, es decir, en los puntos más bajos del motor.
76
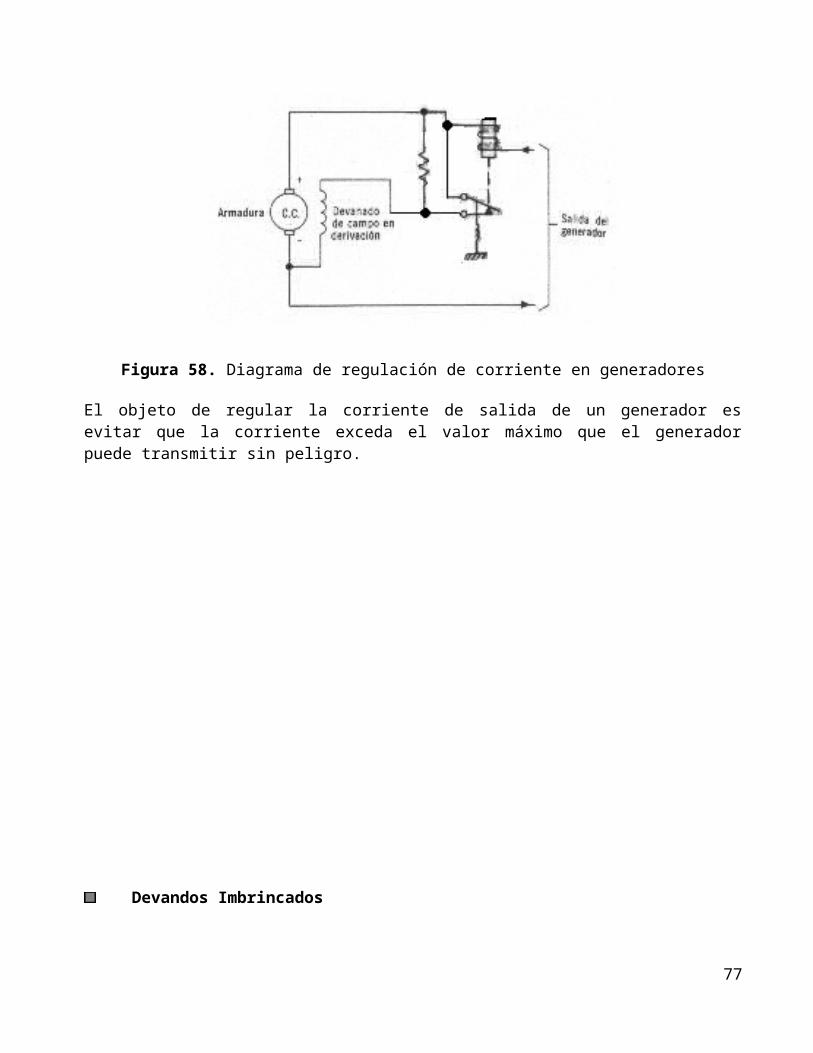
Alineación
Las máquinas deben alinearse siempre con gran precisión. Una mala alineación puede causar vibraciones, averías de rodamientos e incluso rotura de la flecha de salida.
Los mejores medios auxiliares para obtener una alineación perfecta son un par de indicadores de reloj; cuando la transmisión es por medio de banda(s), debe comprobarse que las flechas son paralelas y que las poleas están exactamente una frente a otra. La instalación de la unidad que acciona, ya sea motor o motorreductor, deberá hacerse de tal manera que la parte inferior de la banda, con respecto al sentido de rotación, ejerza el tiro. Debe comprobarse que la banda no tenga tensión excesiva, ya que esto dañaría los rodamientos.
El alineamiento correcto del motor con el equipo accionado es de suma importancia.
a) Acoplamiento directo
Para el accionamiento directo, use de ser posible acoplamientos flexibles. Si requiere más información, consulte al fabricante del equipo. La vibración mecánica y el funcionamiento abrupto pueden indicar un alineamiento incorrecto. Utilice instrumentos indicadores tipo cuadrante para chequear el alineamiento. El espacio entre los cubos del acoplamiento deberá mantenerse al nivel recomendado por el fabricante del acoplamiento.
b) Ajuste del juego axial
La posición axial del bastidor del motor con respecto a su carga es también muy importante. Los cojinetes del motor no están diseñados para cargas con excesivo empuje axial externo. El ajuste incorrecto resultará en fallas.
c) Relación de poleas
Verificar que la relación de poleas sean las especificadas por el fabricante.
d) Accionamiento por correa
77
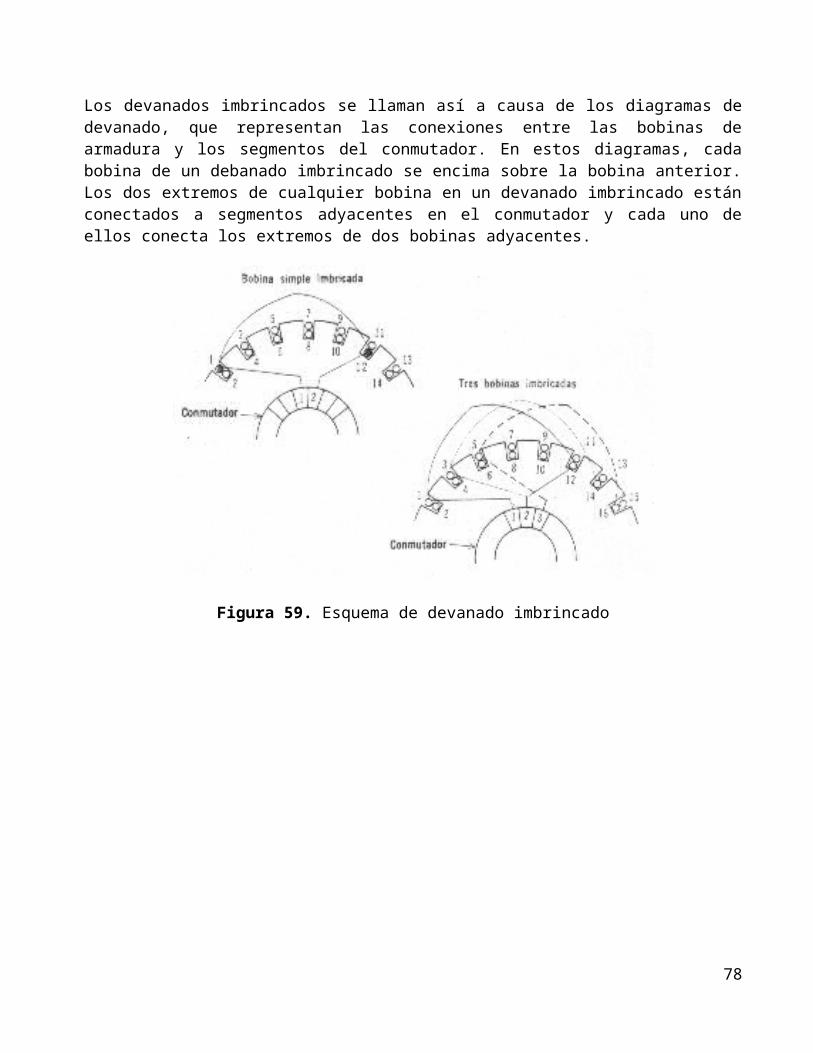
Alinee cuidadosamente las poleas de manera de minimizar el desgaste de la correa y las cargas de cojinetes axiales. La tensión de la correa deberá ser la necesaria para impedir el deslizamiento de la correa bajo velocidad y carga nominal. Pero durante el arranque pueden producirse deslizamientos de la correa. ¡CUIDADO!: No sobretensione las correas.
e) Cargas acopladas
Los motores con cojinetes de manguito (camisa) son adecuados únicamente para cargas acopladas.
Figura 67. Alineamiento del motor
78

Colocación de Clavijas y Pernos
Luego de verificar que el alineamiento es apropiado, deberán insertarse clavijas [espigas] a través de las patas del motor hasta los cimientos. De este modo se mantendrá la posición correcta del motor si se hace necesario sacarlo. Algunos motores están diseñados para enclavijamiento.
1. Perfore agujeros para clavijas en patas diagonalmente opuestas del motor, en los lugares provistos.
2. Perfore en los cimientos los agujeros correspondientes.
3. Escarie todos los agujeros.
4. Instale clavijas de tamaño apropiado.
5. Los pernos de montaje deberán apretarse cuidadosamente para evitar cambios en el alineamiento. Use una arandela plana y una arandela de seguridad bajo cada tuerca o cabeza de perno para mantener bien aseguradas las patas del motor. Como alternativa a las arandelas se pueden usar pernos o tuercas con reborde.
79
Instalación Eléctrica
Los cables de alimentación al motor deben ser generosamente dimensionados para evitar caída de tensión (voltaje) durante el arranque y durante el servicio normal, ya que el par del motor es proporcional al cuadrado de la tensión. Así un motor al que le llegue durante su arranque solo 80% del voltaje nominal, solo desarrollará 0.82 = 0.64 de su par de arranque. El motor, que normalmente tiene nueve terminales se conecta a la red siguiendo las instrucciones de la placa de características cuando se permite arranque a plena tensión
Debe comprobarse previamente que el motor éste conectado para la tensión que tenga la red. Cuando se empleen arrancadores a tensión reducida. Y/D (estrella – delta) u otros especiales, y en los casos de motores de dos velocidades deben observarse y seguirse cuidadosamente las instrucciones y diagramas de conexión del motor y arrancardor respectivo. El arrancador manual u operado por control remoto, debe ser adecuadamente seleccionado con respecto a tensión, frecuencia, corriente y el tipo de servicio que tendrá el motor.
Antes de poner en marcha un motor nuevo (o uno que no ha estado en operación durante largo tiempo), es buena regla medir la resistencia del aislamiento del motor para asegurarse que no esta demasiado humedo, midiendo con un megger de 1,000V. para motores hasta 600V deben obtenerse valores de acuerdo con la siguiente fórmula empírica:
(Raisl) ≥ 20U / 1000 + 2P (megaohmios)
Donde: U = tensión (V)P= potencia (Kw) según la placa de datos
El cableado del motor y del control, la protección contra sobrecarga, los seccionadores, los accesorios y las conexiones a tierra deberán cumplir con lo especificado en el Código Eléctrico Nacional y los códigos y métodos locales.
80
Caja de Conexión Eléctrica
Algunos fabricantes suministran un caja para facilitar las conexiones del equipo, e incluso en estas cajas se pueden colocar accesorios adicionales detectores de temperatura por resistencia (RTD’s), etc.
Los motores de una velocidad tienen como estándar 9 terminales del devanado del estator haciendo posible la reconexión entre 220V y 440V de la siguiente manera:
Los motores de dos velocidades con polos conmutables tienen seis terminales, como a continuación se muestra:
Para motores de dos velocidades con devanados separados, se marcan en sus terminales el número de polos de cada devanado.
81

Alimentación de CA
La conexión del motor a la toma de corriente debe ser tal y como lo indica el fabricante del equipo en el diagrama de conexiones, generalmente ubicado en la placa de fábrica o en la parte interior de la tapa en la caja de conexión.
Se sugiere analizar las gráficas que proporcionan los fabricantes en relación al ajuste de eficiencia por variación del voltaje, desbalanceo de fases con el fin de que la alimentación de energía no afecte gravemente la eficiencia del motor (véase gráfica 1 y 2).
1.00
0.99
0.98
0.97
0.96
0.95
0.94
0.93
0.92
1.01
1.02
1.03
1.04
1.05
1.06
1.07
1.08
0 2 4 6 8 10 12 14 16-2-4-6-8-10-12-14-16
Fact
or d
e aj
uste
Variación de voltaje (% )
Factor de potencia
Eficiencia
Corriente
Gráfica de ajuste de eficiencia por variación de voltaje
Gráfica 1. Gráfica de ajuste de eficiencia por variación de voltaje.
82
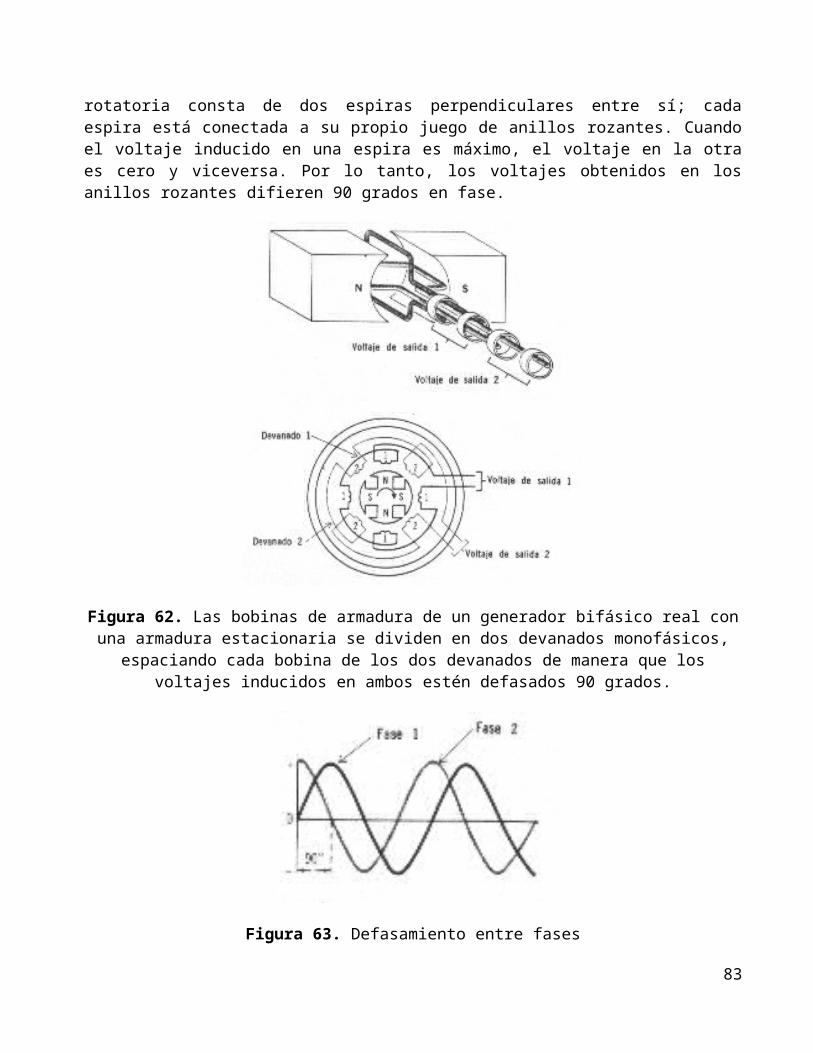
Ajuste de eficiencia por desbalanceo de voltaje
0.75
0.8
0.85
0.9
0.95
1
0
0.5 1
1.5 2
2.5 3
3.5 4
4.5 5
Desbalanceo (%)
Fact
or d
e aj
uste
de
efic
ienc
ia
Gráfica 2. Ajuste de eficiencia por desbalanceo de voltaje.
Potencia de Salida
Se define normalmente como la potencia que puede dar el motor a una temperatura ambiente de 40oC y hasta 1000m sobre el nivel del mar como máximo.
Un motor eléctrico tiene que ser capaz de suministrar la potencia requerida por la máquina accionada pero es aconsejable además contar con un margen de seguridad, ya que a menudo se presentan pequeñas sobrecargas difíciles de calcular. Una sobrecarga anormal producirá que el devanado del motor se queme por sobrecalentamiento. Si se tiene que escoger entre dos tamaños de motor, siempre se deberá escoger el de mayor capacidad o más grande. Por otro lado no es también recomendable escoger un motor demasiado grande ya que tendrá un alto precio de compra y operara con un bajo factor de potencia. Además que en el caso del motor jaula de ardilla, la corriente de arranque, que es proporcional al tamaño del motor, será innecesariamente alta.
83

Elementos de la Instalación Eléctrica para Motores.
La instalación eléctrica para motores se debe de hacer siempre de acuerdo con las disposiciones de las normas técnicas para instalaciones eléctricas que se refieren no sólo a la instalación misma de los motores, sino, también a los requisitos que deben llenar los elementos que la conforman.
En la figura siguiente se muestran los elementos principales de la instalación eléctrica de uno o varios motores.
Para el cálculo de los distintos elementos de la instalación eléctrica de un motor se parte de un dato básico que es:
La corriente a plena carga.
Es la corriente que toma o consume un motor cuando desarrolla su potencia nominal y se indica por lo general en su placa de características. Los valores de corriente a plena carga para motores monofásicos y trifásicos se dan por lo general en tablas, para los fines del cálculo de las instalaciones eléctricas.
De la figura anterior:
Alimentador (A).
El calibre del alimentador para dos o más motores se calcula para la siguiente corriente
I = 1.25 x IPC (motor mayor) + IPC (otros motores)
Donde : IPC = corriente a plena carga.
Protección del alimentador (B).
La protección del alimentador ya sea que se haga por medio de fusibles, interruptores automáticos (termomagnéticos o electromagnéticos) o cualquier otro tipo de interruptores se debe calcular para una corriente que tome en consideración la corriente máxima del motor mayor más la suma de las corrientes a plena carga de los otros motores conectados al mismo circuito. Es decir:
I = Iarranque máx. (motor mayor) + IPC (otros motores)
84
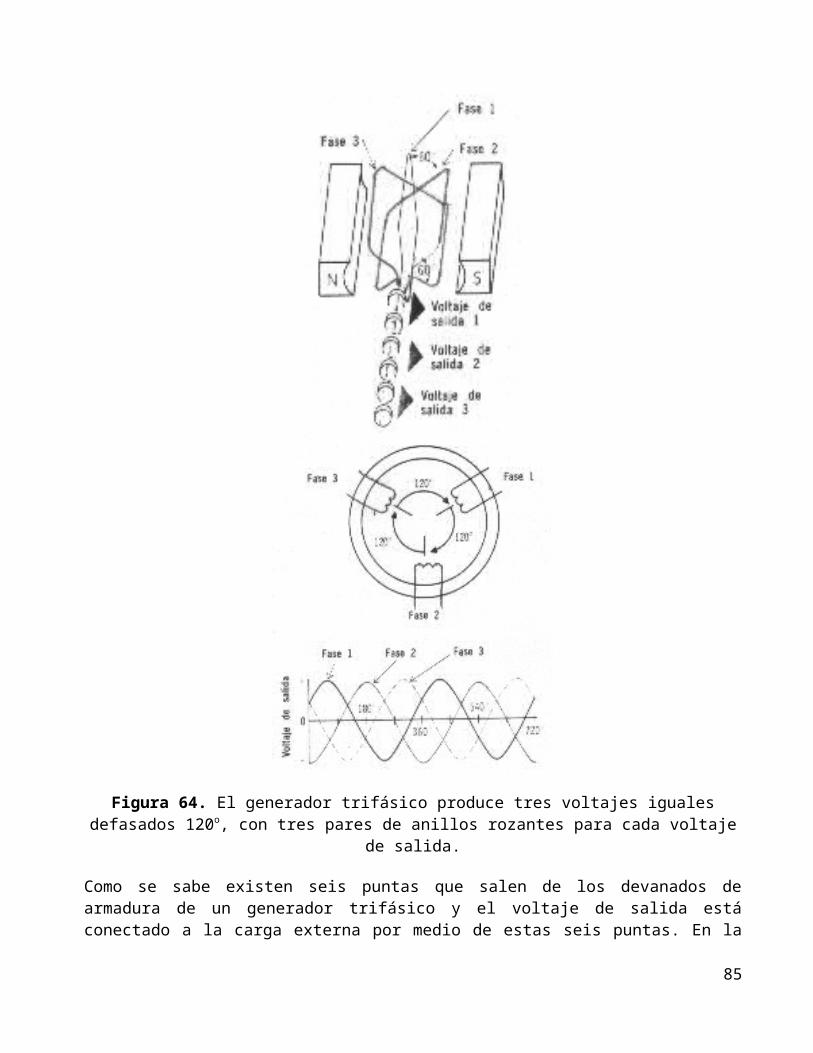
La corriente de arranque es la que toma un motor justamente durante el periodo de arranque, y es considerablemente mayor que su corriente nominal, cuando el motor ha alcanzado su velocidad normal. Esto significa que los conductores que alimentan a los motores deben estar protegidos por un elemento contra sobrecarga con una capacidad suficientemente grande como para soportar la corriente de arranque por un tiempo corto.
La corriente de arranque de un motor depende principalmente de su reactancia, y se designa en algunos motores por medio de una letra, correspondiendo las primeras letras del abecedario a motores de alta reactancia y las últimas a motores de baja reactancia. Estas cantidades se expresan como kVA/Hp a rotor frenado y se dan como la corriente nominal, también en tablas.
Protección del circuito derivado (C).
Esta protección se puede hacer en los casos más simples por medio de fusibles, o bien por medio de interruptores automáticos. Ésta protección tiene como objetivo proteger a los conductores del circuito derivado contra corto circuito y debe tener una capacidad tal que permita el arranque del motor sin que se desconecte (abra) el circuito. Se calcula de acuerdo con la tabla 3.
Circuito derivado (D).
A los conductores que conectan el motor con el tablero de distribución o con el alimentador se les denomina “el circuito derivado del motor”. A estos conductores para su cálculo se les considera una sobrecarga del 25%, es decir, para su cálculo se considera la siguiente expresión:
I = 1.25 x IPC
Desconectador (E).
El propósito del desconectador es aislar el motor mediante un control del circuito derivado, para que, en caso necesario se puedan hacer trabajos de mantenimiento o ajustes en el motor sin ningún problema para la persona que los efectúe. El desconectador es básicamente un interruptor de navajas que debe tener una capacidad dada por la corriente
I = 1.15 x IPC
Por lo general el desconectador no tiene la función de apertura estando el motor en operación.
Protección del motor (F).
85
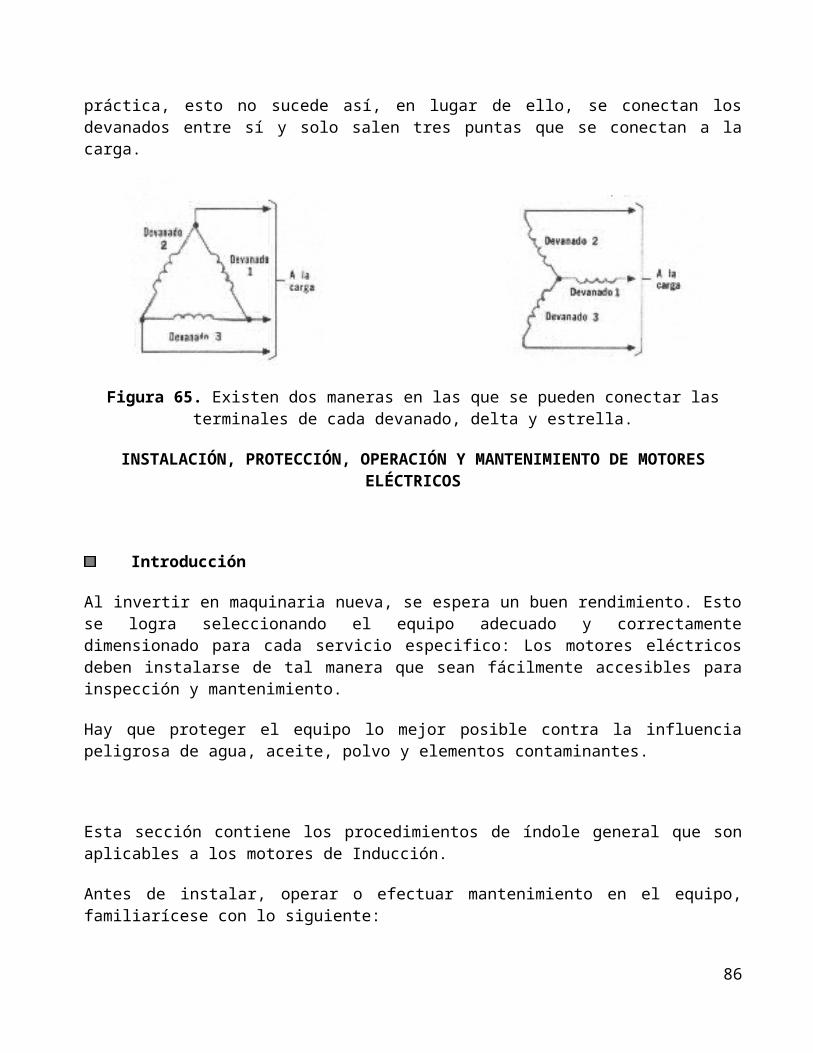
Esta protección es contra una sobrecarga para evitar que el motor se sobrecaliente, para lo cual se calcula para un valor máximo permisible del 25%. Es decir el elemento de protección se calcula para una corriente
I = 1.25 x IPC
Por lo general este elemento se encuentra dentro del control del motor, formando parte del mismo.
Control del motor (G).
En el concepto elemental, este control se refiere al dispositivo que permite arrancar, poner en operación y para un motor.
Según el tamaño y el tipo del motor este dispositivo puede ser un simple interruptor de navajas o bien un desconectador manual o automático o en ocasiones otros elementos adicionales para arrancar a voltaje reducido o con resistencias en el rotor, como es el caso de los motores con rotor devanado.
Control secundario (H).
Cuando se tienen motores eléctricos con rotor devanado, su control se efectúa mediante un reóstato que se conecta al devanado del rotor a través de los anillos rozantes.
Estación de botones para control remoto (J).
Cuando los motores están controlados por medio de dispositivos electromagnéticos o termomagnéticos, se puede accionar la operación de arranque o para por medio de una estación de botones que normalmente no se encuentra cercana al motor (de aquí que se le denomine de control remoto).
86

Protección Contra Corrientes de Fallo
Con el fin de proteger el motor y el cable de alimentación es necesario implementar:
1. Protección térmica de sobrecarga, protegiendo el motor contra daños por sobrecalentamiento. La protección deberá ser ajustada a la corriente nominal del motor. Se hace normalmente por medio de los elementos bimetalitos adyacentes al arrancador.
2. Fusibles protegiendo la línea y el motor contra corto circuito. Los fusibles se eligen dependiendo de la corriente nominal del motor.
Conexión a Tierra
Se recomienda conectar a tierra los motores para limitar su potencial a tierra en caso de conexión o contacto accidental entre las partes eléctricas energizadas y las partes exteriores metálicas. Consultar el Código Nacional Eléctrico y/o Códigos Locales.
Al efectuar la conexión a tierra, el instalador debe asegurarse que exista una firme conexión metálica y permanente entre el punto de conexión a tierra y el motor o la caja de terminales del motor. No se debe usar conexiones externas a tierra en motores ubicados en entornos peligrosos.
Existen aplicaciones donde la conexión a tierra de las partes externas de un motor puede resultar en mayor riesgo al aumentar la probabilidad de que una persona en el área pueda hacer contacto simultáneo con la conexión a tierra y con alguna otra parte eléctrica energizada de otro equipo eléctrico sin conexión a tierra. En equipos portátiles es difícil asegurar que se mantiene la conexión positiva a tierra al trasladar el equipo, y la instalación de un conductor a tierra puede llevar a un falso sentido de seguridad.
Cuando la consideración cuidadosa de los riesgos involucrados en una aplicación particular indique que los bastidores de la máquina no se deban conectar a tierra o cuando las condiciones inusuales de funcionamiento dicten que no se puede usar un bastidor conectado a tierra, el instalador debe asegurarse que la máquina esté permanente y eficazmente aislada de tierra. En aquellas instalaciones donde el bastidor de la máquina esté aislado de tierra, se recomienda que el instalador coloque etiquetas o letreros apropiados de advertencia en el área del equipo.
Calentamiento
El régimen de servicio y la máxima temperatura ambiente se indican generalmente en la placa de fábrica del motor. El exceso de calentamiento del motor disminuye la eficiencia del mismo.
87

Localización de Fallas en Motores Eléctricos
El cortocircuito se produce fundamentalmente cuando la corriente circula por un camino directo a través de su fuente de origen. Los cortocircuitos jalan más corriente porque disminuye la resistencia del circuito y, como consecuencia, disminuye el voltaje. Las señales típicas de un cortocircuito son: fusibles fundidos, aumento de calor, bajo voltaje. Alto amperaje, presencia de humo.
En la figura se ilustra el cortocircuito de un motor, originado por un defecto de este, en el cual dos alambres se tocan provocando una derivación de la circulación normal de la corriente.
Un circuito abierto es un circuito abierto o interrumpido, en un circuito abierto la resistencia es infinita y no hay absolutamente nada de corriente, ya que su conducto ha sido interrumpido por una rotura. Las señales típicas de un circuito abierto son; resistencia infinita, lectura de amperaje cero, el aparato o dispositivo se encuentra completamente inactivo, sin corriente.
En la figura se muestra un motor con un circuito abierto a causa de una rotura en el circuito del motor, lo cual impide que la corriente circule por un conducto completo.
88
Un contacto a tierra se origina por defectos de aislamiento o cuando la colocación de un cable o una parte componente es la causa de que la corriente tome un camino anormal en el circuito. El contacto a tierra se origina cuando parte del embobinado hace contacto eléctrico con el bastidor de hierro del estator. Por lo general los contactos a tierra comunes se originan por cables con aislamiento deficiente o por partes componentes instaladas incorrectamente. Un motor que hace contacto a tierra, da toques, ya que el bastidor ha formado parte del circuito eléctrico. Las señales típicas son: Una lectura anormal en el amperaje, una lectura anormal en el voltaje, una lectura anormal de la resistencia, toques, funcionamiento anormal del circuito.
En la figura se ilustra un circuito normal y uno aterrizado
89
Arranque
El rotor debe poder girar libremente al girar a mano el eje. El motor debe funcionar uniformemente sin mucho ruido. Si el motor no arranca y produce un zumbido muy marcado, quizá la carga sea demasiado grande para el motor o quizá se haya conectado erróneamente. Apague inmediatamente el motor e investigue el problema.
Haga funcionar el motor bajo carga normal durante un período inicial para verificar que no haya ruidos inusuales, calentamiento o corriente excesivos. Para invertir la dirección de giro, intercambie cualesquiera dos de los conductores de alimentación eléctrica.
El usuario deberá seleccionar un arrancador de motor y protección contra sobrecorriente adecuados para este motor y su aplicación. Se sugiere consultar los datos de aplicación del arrancador del motor y el Código Nacional Eléctrico o los códigos locales aplicables.
Operación
Una vez instalado mecánicamente y eléctricamente el equipo y después de que se han revisado conexiones, se puede poner en marcha el equipo. Durante las primeras horas de operación debe chocarse cualquier anormalidad en la corriente, vibraciones, ruido, temperatura de baleros y temperatura de carcasa tanto del motor, como de la máquina de trabajo.
Servicio de Operación
Basados en las variaciones de carga durante la operación se hace una distinción entre los tipos de servicios especificados mas adelante, cada tipo de servicio se define por medio de una prueba de carga a la que se somete el motor sin que éste alcance los límites de temperatura establecidos dentro de los estándares.
Servicio Continuo
El motor es operado continuamente a la potencia nominal.
90

Servicio continuo con carga intermitente
El motor es conectado a la red por un periodo largo, pero solamente es cargado en breves periodos que ocurren más o menos regularmente. Bajo éstas condiciones se puede obtener del motor una potencia mayor de su potencia nominal. Un motor que en un periodo de 10 minutos trabaja con carga durante 6 minutos y en vacio durante 4 minutos, trabaja con una intermitencia de 60%.
Servicio continuo con carga intermitente de corta duración
El motor marcha durante 30 ó 60 minutos y luego se deja enfriar hasta 40 oC antes del siguiente periodo de trabajo. En muchos casos es conveniente asesorarse con el fabricante de motores para el cálculo y la correcta selección del mismo.
Inversión de Rotación en Motores Eléctricos
Con frecuencia es necesario revisar el sentido de rotación de la flecha de un motor monofásico. La dirección de la rotación de la mayoría de los motores monofásicos se cambian invirtiendo los cables del devanado de arranque o del de funcionamiento del motor.
Para cambiar la dirección de rotación en un motor de polos sombreados. Por lo común es necesario desarmar el motor e invertir el estator entre las tapas. Esta operación se realiza porque la dirección de la rotación depende del efecto de la bobina sombreante, que del polo principal al polo de sombra.
91
Para cambiar la dirección de la rotación en un motor de C-C, basta simplemente con invertir la polaridad ya sea de los campos inductores o bien de las escobillas.
La dirección de la rotación de un motor trifásico de inducción se cambia fácilmente mediante el cambio de dos cualesquiera de las 3 conexiones del motor. Por lo general se intercambian las dos conexiones exteriores.
92

Centro De Control De Motores CCM.
Es esencialmente un tablero que se usa en primer término para montar las componentes del alimentador de los motores y de sus circuitos derivados.
El número de secciones en un centro de control de motores depende del espacio que tome cada una de sus componentes, de manera que si el diseñador sabe que componentes se incluirán, se puede diseñar el centro de control de motores.
El centro de control de motores ofrece las siguientes ventajas:
Permite que los aparatos de control se alejen de lugares peligrosos.
Permite centralizar al equipo en el lugar mas apropiado.
Facilita el mantenimiento y el costo de la instalación es menor.
Para diseñar el centro de control de motores se debe tomar en consideración la siguiente información:
1 Elaborar una lista de los motores que estarán en el CCM indicado para cada motor:
- potencia en Hp o kW.
- voltaje de operación.
- corriente nominal a plena carga.
- forma de arranque
- si tiene movimiento reversible
- lámparas de control e indicadoras
93
MANTENIMIENTO Y DIAGNÓSTICO DE FALLAS
Pruebas de Funcionamiento a Motores Eléctricos
Para diagnosticar fallas en los motores es importante que el técnico de servicio siga un procedimiento lógico y sistemático con el fin de eliminar pérdidas de tiempo, pruebas y reposiciones inútiles de partes componentes. La mayoría de los desperfectos comúnes en los motores pueden examinarse fácilmente mediante equipo de pruebas sencillo. Así mismo es importante que el técnico de servicio conozca perfectamente el uso de este equipo para analizar y reparar correctamente el motor.
Inspección Audio – Visual
Consiste en realizar una inspección empírica, esto es que únicamente observando las condiciones físicas del motor y escuchando el motor eléctrico en funcionamiento se puede dar un veredicto. Primeramente inspeccionar los desperfectos de fácil localización, como terminales de cable ó armazones rotos, o alambres conductores carbonizados; cualquiera de estos desperfectos impide el funcionamiento del motor. Un motor ruidoso es clara señal de baleros defectuosos.
Prueba de Alimentación Eléctrica
Se trata de tomar una serie de lecturas con distintos instrumentos de medición como: el voltmetro para saber si tenemos caídas de tensión en la línea de alimentación ó variaciones de voltaje (el voltmetro se conecta en paralelo). El ampermetro que detecta la corriente eléctrica que fluye en el conductor (para el caso de el ampermetro básico, se conecta en serie y con carga y para el caso del ampermetro de gancho solo se introducen las tenazas al conductor eléctrico).
94

Un cortocircuito en un motor se debe a que dos alambres del circuito del motor se conectan y forman un desvio o derivación en la circulación normal de la corriente. Mediante el uso de un amperímetro, de preferencia de gancho se detecta un motor en corto circuito. Si la lectura del amperaje es mayor que la de su capacidad nominal indicada en su dato de placa. Conviene tener presente que otros factores como el bajo voltaje en la línea o un motor con sobrecarga pueden ser la causa de que el motor jale demasiada corriente. Un motor humeante y caliente que quema fusibles, probablemente se encuentra en cortocircuito. Además, un motor en corto, puede calentarse rápidamente, funcionar caliente, fallar en el arranque o funcionar lentamente. Un motor con cortocircuito a menudo produce un ruido sordo y ronco durante su operación.
Lámpara de Prueba
Antes de que el técnico de servicio intente operar el motor, primero deben hacerse pruebas en el motor para tratar de descubrir circuitos defectuosos, como contactos a tierra, cortocircuitos y circuitos abiertos. Como se recordará un contacto a tierra se origina en los arrollamientos que hacen contacto eléctrico con alguna parte metálica del motor. Los contactos a tierra comunes se originan en un cable de aislamiento defectuoso que hace contacto con el estator y las terminales de los cables. Un motor con un arrollamiento que hace contacto a tierra quema fusibles, funciona caliente o no tiene energía. Un motor que haga contacto a tierra puede dar toques; por lo tanto, siempre debe tenerse cuidado extremo al momento de efectuar la prueba. Para probar un motor con contacto a tierra, se conecta una terminal a la línea de alimentación y otra a la estructura metálica del motor). Si la lámpara se enciende, esto será señal de que el motor hace contacto a tierra. Dicho de otra forma la lámpara de prueba determina si el aislante del conductor del motor se encuentra aterrizado con la carcaza del mismo.
Se recordará así mismo, que un circuito abierto se origina por una interrupción del circuito del motor que impide la circulación de la corriente en toda su trayectoria. Un motor no funciona con un circuito abierto. En muchas ocasiones, si una de las tres fases de un motor se encuentra abierta, el motor no funciona, simplemente zumba. Para determinar si el motor tiene un circuito abierto, se conectan las terminales de la lámpara de pruebas a los alambres conductores del motor. Si la lámpara no se enciende, el motor tiene un circuito abierto; si la lámpara se enciende, el circuito se encuentra completo.
95
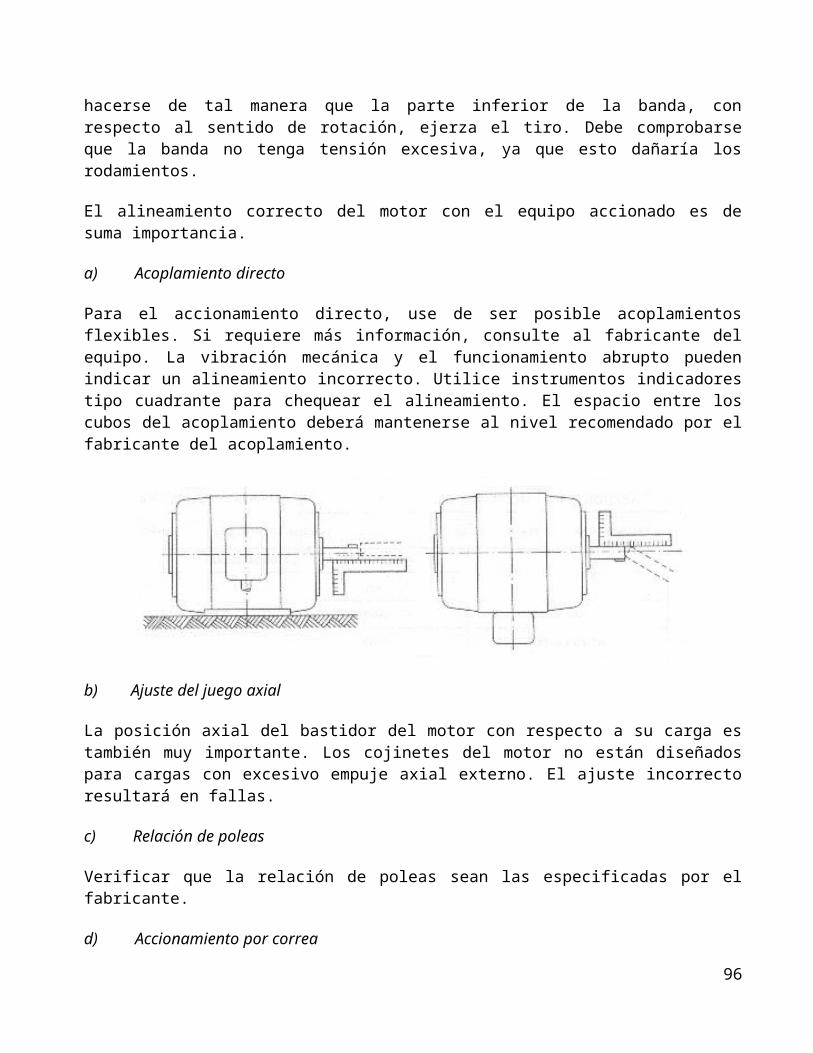
Prueba de Continuidad
Con un Omhetro se puede determinar la continuidad de un conductor eléctrico para saber si se encuentra abierto el mismo ó aterrizado, mediante la resistencia que presenta el conductor (si presenta un numero 1, el conductor se encuentra abierto y si presenta una variación numérica el conductor presenta continuidad), o con un multímetro en la escala de continuidad (si se escucha un bip tiene continuidad, y si no se escucha el circuito se encuentra abierto).
Prueba de Atracción Magnética
Consiste en conectar a una fuente de alimentación el estator e introducirle un desarmador y moverlo alrededor en su entrehierro para probar si existe magnetismo en cada polo. Cada una de las bobinas debe producir el mismo grado de atracción magnética; de esta manera, la bobina que presente el menor grado de atracción magnética probablemente tiene un cortocircuito.
96
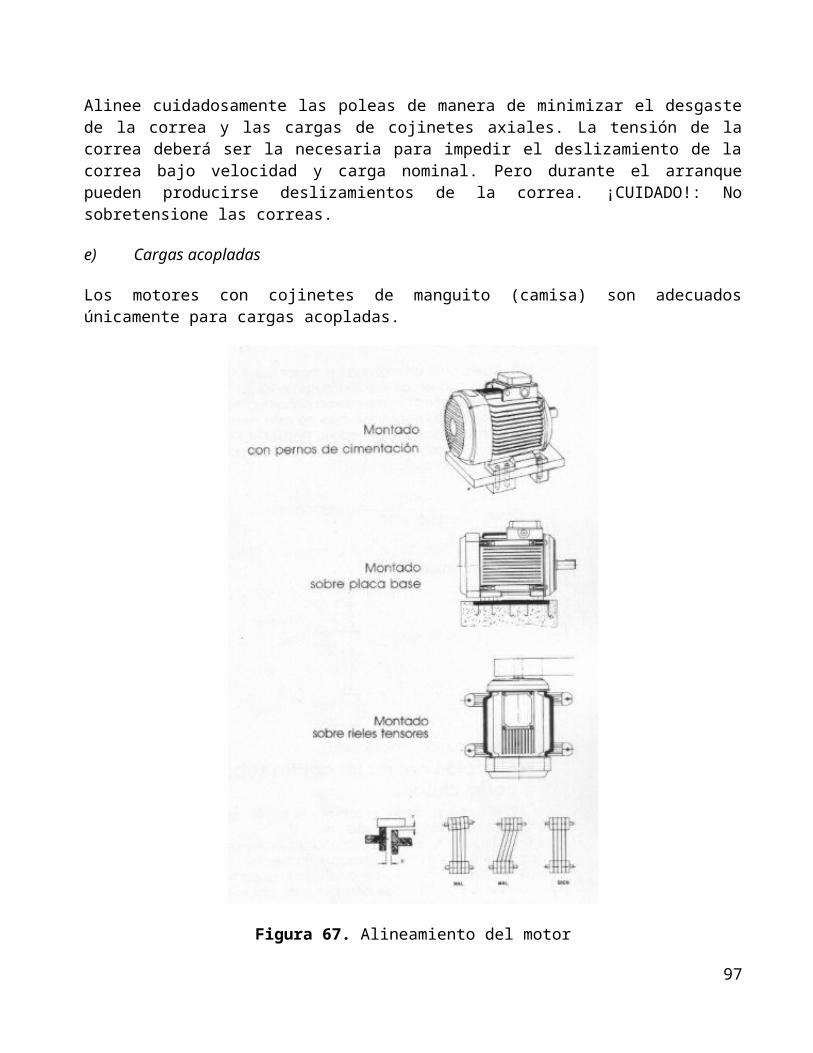
Pruebas de Capacitor
Si se aplica energía eléctrica a un motor monofásico y el motor solamente zumba, giresé manualmente el eje. Si el motor comienza a funcionar, el desperfecto se encuentra en el circuito de arranque. Sin embargo, si el motor arranca, pero trabaja irregularmente, se para, y después se pone en marcha nuevamente, el desperfecto se encuentra en el circuito de trabajo. Al localizar un circuito abierto de un motor con capacitor, por lo general es buena idea examinar primeramente el condensador.
Se trata mediante una prueba de chispeo para determinar si el capacitor de arranque funciona correctamente (se descarga con un desarmador aislado el capacitor chocando sus 2 puntas, después se le conecta a una línea de alimentación por un instante y se vuelve a descargar con el desarmador, si funciona correctamente producira una chispa, si no produce una chispa el capacitor se encuentra dañado). Existe otro método para probar un capacitor mediante un omhetro (se selecciona la escala máxima de Ohms y se conectan las 2 terminales del ohmetro a las terminales del capacitor, es necesario asegurarse que se encuentra descargado para no dañar el aparato de medición; el valor debe aumentar y disminuir lentamente a una lectura cercana a cero, si no existe un incremento, es señal de que el capacitor se encuentra abierto y si el valor no disminuye esto indicará que el capacitor tiene un corto circuito).
97
Para probar el capacitor y detectar si hace contacto a tierra, se utiliza simplemente una lámpara de prueba, uno de los conductores de la lámpara se conecta a una de las terminales del capacitor y otra al blindaje metálico del capacitor.
Prueba del Megger
Para probar un motor y detectar si está en contacto a tierra, se conecta un conductor del megóhmetro a la armazón del motor y el otro conductor a la línea de alimentación del motor. Un motor que haga contacto a tierra registrará una lectura de cero o próxima a cero. Para probar el motor y detectar si hay circuito abierto, se conecta el megger a cada par de fases. Un motor con un circuito abierto, hace que el megger registre una lectura alta.
98

Sirve para verificar la rigidez dieléctrica del aislante. Para probar el motor y detectar si hay circuito abierto, se conecta el megóhmetro a cada par de fases del motor. Un motor con un circuito abierto hace que el megómetro registre una lectura cercana alta.
Prueba con Termómetro Lasser
Sirve para determinar la temperatura del motor. Un incremento de temperatura provoca el humeo del motor y la posible carbonización del conductor eléctrico. (se presiona el gatillo y apunta el lasser a los devanados).
Prueba de Estetoscopio Electrónico
Un método común de controlar las disposiciones consiste en escuchar el ruido en funcionamiento de los rodamientos. El estetoscopio electrónico puede identificar y localizar la fuente de ruido inusual y así determinar si un rodamiento se encuentra dañado. Al escuchar al rodamiento se determina por el tipo de ruido que produzca; un zumbido es clara señal de un balero dañado. Si no hay nada erróneo, se oirá una especie de ronroneo, pero si el rodamiento está dañado, el ruido será fuerte, generalmente un golpeteo irregular.
99
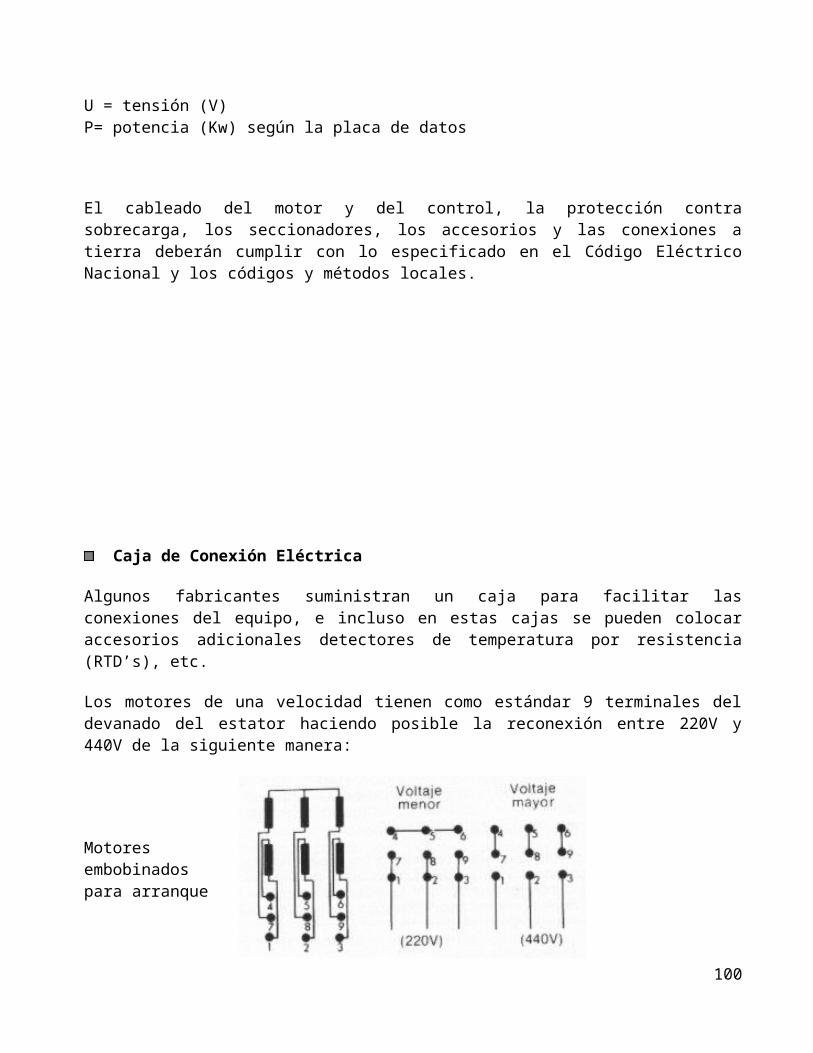
Probador de Inducidos
Un cortocircuito se puede detectar con un probador interior de inducidos, el probador se coloca sobre las laminaciones del estator en un extremo de una bobina. En conjunto, el probador de inducidos y las bobinas del estator funcionan como un transformador. Las bobinas del probador funcionan como el primario, y las bobinas del estator funcionan como el circuito secundario. El probador de inducidos, que esta provisto de una hoja calibradora integrada, vibra excesivamente al ser colocado sobre la bobina en cortocircuito.
Prueba de Velocidad
Con un tacómetro óptico o mecánico se pueden obtener las revoluciones por minuto en el eje del motor.
Mantenimiento Preventivo a Motores Eléctricos
El mantenimiento preventivo consiste en limpiar, lubricar, observar y hacer ajustes menores para que la operación del equipo pueda ser ininterrumpida. La duración de un motor eléctrico depende del tipo de mantenimiento que reciba, un motor con mantenimiento deficiente se reconoce fácilmente por su aspecto sucio y corroído. Un programa completo de
100
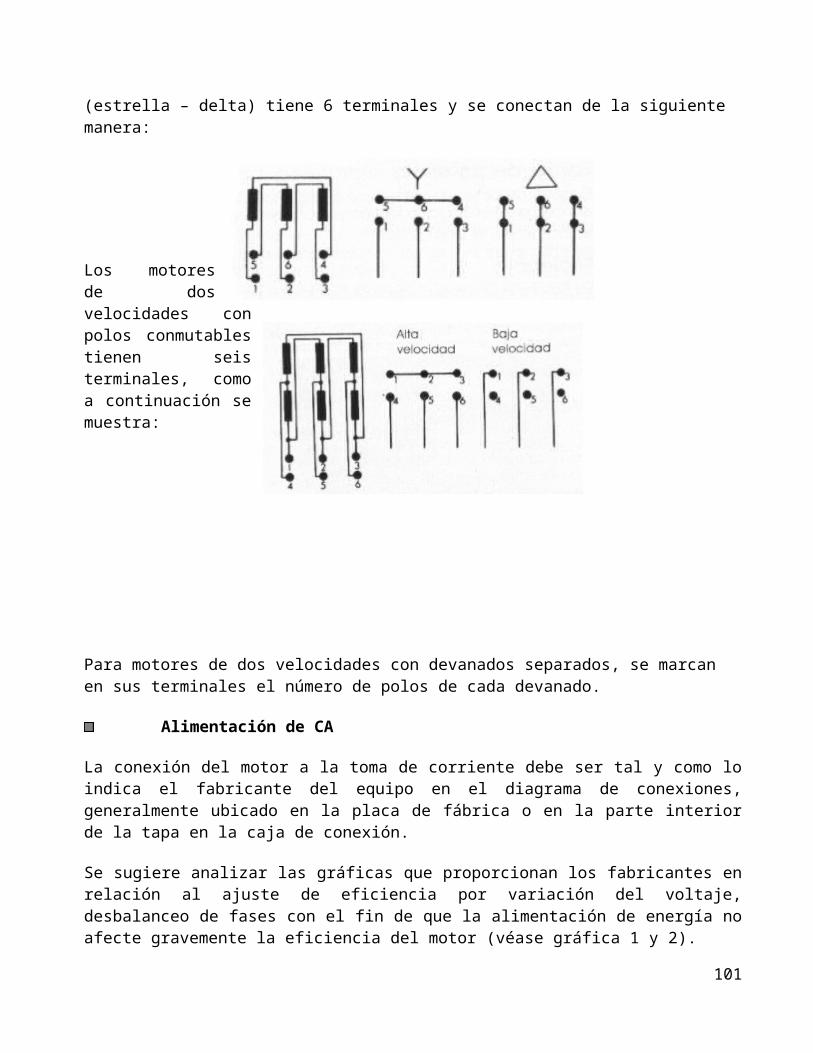
mantenimiento incluye la inspección periódica, el registro y el servicio de motores eléctricos. Un pequeño ajuste ó una simple limpieza del motor ahorra reparaciones costosas y perdidas de tiempo a futuro.
Las inspecciones periódicas reducen la frecuencia de las fallas, todas las inspecciones deben ir acompañadas de un libro de registro en el cual se anoten el estado del motor y los servicios que se le dan. Algunos motores requieren inspecciones mas detalladas y con mas regularidad; al exponerse en condiciones de trabajo sucias y húmedas requiera una inspección mas continua.
La mugre, la grasa, el agua y sustancias químicas son causantes de cortocircuitos, de contacto a tierra y de calentamientos. Estos elementos dañinos afectan los rodamientos, el conductor eléctrico, tapan la ventilación, desgastan el conmutador y las escobillas.
Cualquier aumento ó disminución de temperatura, aumento de ruido, decoloración ó pérdida de su aspecto normal, son señales que anuncian el peligro de fallas en el motor. Estas condiciones deben recibir inmediatamente atención con el fin de conocer las razones por las que ocurren.
Es preferible realizar un programa de mantenimiento con el fin de efectuar servicio periódicamente y no esperar a que ocurran mayores desperfectos donde la cuestión económica determina las reparaciones.
Procedimiento del Mantenimiento Preventivo
Generalidades
Limpiar de polvo los aparatos eléctricos para que no ocasione falsos contactos y / o flamazos, así como el polvo adherido a la carcasa de los motores a fin de no disminuir la eficiencia de enfriamiento.
Se engrasan los rodamientos que tienen graseras con la calidad, cantidad y con los intervalos que señala la placa del motor, mientras este en marcha.
Se hacen observaciones de la corriente, vibraciones, ruido, temperatura de rodamientos y temperatura de carcasa. También debe observarse mediante mediciones el estado del aislamiento de los devanados, por lo menos dos veces por año.
101
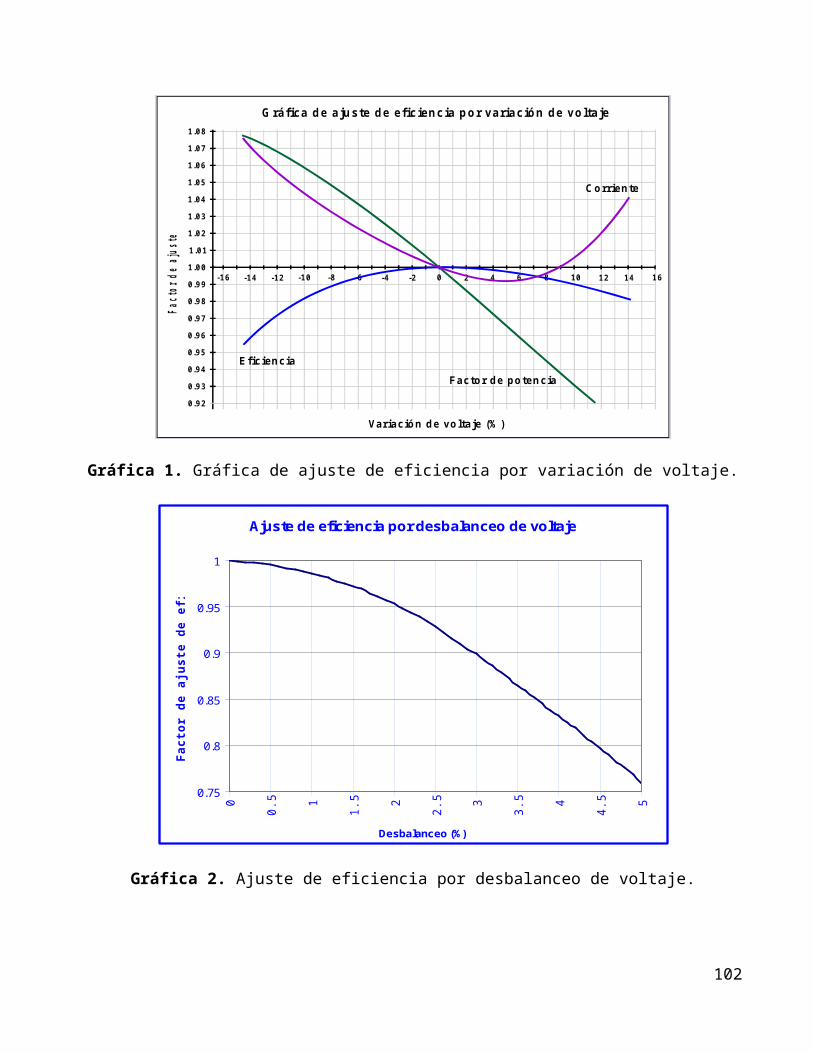
Las observaciones y los ajustes efectuados deben anotarse en reportes de mantenimiento y estos se usaran como base para programar paros y llevar a cabo el mantenimiento correctivo.
1.- Las escobillas en malas condiciones por desgaste, rotas ó fracturadas deben ser reemplazadas.
2.- Un conmutador sucio debe limpiarse con un fragmento de tela limpia, con lija de agua ó piedra para limpiar.
3.- La flecha del motor (rotor) debe recibir inspecciones periódicas para detectar una desalineación.
4.- Todos los pernos roscados y las tuercas deben mantenerse apretados.
5.- Todos los cables conductores y devanados del motor deben recibir inspección para detectar mugre, roturas y aislamiento desgastado.
6.- Los rodamientos deben lubricarse con regularidad pero no en exceso.
7.- El juego axial incorrecto del motor debe verificarse ( 1/64 plg permisible)
8.- Verificar el capacitor de arranque mediante la prueba de chispeo.
9.- Lubricar el mecanismo del interruptor centrífugo mediante compuesto químico.
10.- Rehabilitar el dato de placa.
Mantenimiento Correctivo a Motores Eléctricos
El mantenimiento correctivo consiste en efectuar reparaciones cuando existe una falla presente y ha dejado de proporcionar el servicio el motor. Para diagnosticar fallas en los motores eléctricos es importante seguir un procedimiento de pruebas de funcionamiento, comenzando por una inspección empírica. El mantenimiento correctivo es el servicio que se le da al motor debido a que dejo de funcionar satisfactoriamente, este desperfecto es producido a causa de fallas eléctricas y fallas mecánicas; esto es que en cuanto se presenta una falla que impida el proceso de trabajo, se requiere realizar un mantenimiento a la brevedad, para garantizar la pronta recuperación del proceso de trabajo.
Proceso de Armado – Desarmado - Embobinado
102

Para efectuar este procedimiento es importante seguir paso a paso el método para no dañar aun más el motor.
1. Los acoplamientos, poleas, engranes, ventiladores, deben ser retirados con un extractor de poleas, añadiendole un poco de aflojador químico, debe revisarse si se encuentra sujeto a la flecha del rotor un prisionero.
2. Se marca el bastidor y sus 2 tapas respectivamente con el fin de volverlo a ensamblar correctamente.
3. Se procede a desatornillar los pernos de fijación, analizando la herramienta a utilizar (desarmador, llaves, dados), se aplica aflojador químico en el caso en que exista corrosión.
4. Las tapas laterales son removidas con martillo y cincel, efectuando golpeteos uniformes en el rededor de cada tapa para no dañarla.
5. Si es necesario retirar los baleros, de igual forma se hace con un extractor de poleas, se recomienda colocar las 2 uñas del extractor uniformemente en la circunferencia para evitar raspaduras o dobleces.
6. Se realiza una limpieza general.
a) Se remueve todo el aceite ó grasa de los rodamientos y eje del rotor con estopa.
b) Los elementos metálicos como poleas, ventilador pueden ser limpiados con thiner y brocha.
c) El devanado de campo del estator puede ser limpiado con tetracloruro de carbono (disolvente con fácil evaporación) empleandolo moderadamente. O con un simple sopleteo de compresora ó en su defecto remover polvo con brocha.
d) Limpieza de las escobillas, porta escobillas y conmutador con un trapo limpio humedo.
e) Se realiza una inspección en los devanados del estator ó rotor, verificando que no existan terminales de cable y armazones rotos ó alambres ó conductores carbonizados.
7. Si existiera el caso en que se encuentran raspaduras del barniz en los devanados, se procederá a aplicar una capa de apoxis ó cualquier otro esmalte aislador de secado rápido.
8. Si se encuentra carbonizado el devanado, se realiza una inspección para determinar si es la avería general ó parcial.
103

9. Se efectúa un corte en el centro de cada devanado y se cuenta el número de hilos por ranura ó polo según el tipo de estator.
10.Se retira el conductor dañado por el costado trasero del corte y se determina el # del conductor.
11.Se retira el papel carbonizado y se limpia el polo ó ranuras, después se aísla y aplica nuevamente papel pescado con un poco de esmalte.
12.Se embobina con un número de vueltas y distancia similar a la original, realizando el mismo devanado y con el mismo calibre #.
13.Una vez embobinado se efectúan las conexiones internas correspondientes.
14. Ya rehabilitado ó cambiado el conductor se coloca el rotor evitando roce alguno con los devanados.
15.Se montan las tapas laterales siguiendo las marcas.
16.Los rodamientos nuevos se colocan en las tapas ó en el eje del rotor, aplicando una fuerza uniforme. Para colocar nuevamente el balero se puede hacer en frío o en caliente (120oC temperatura máxima) ya sea con una prensa hidráulica o con unos golpeteos uniformes, utilizando un tubo que se ajuste al diámetro del balero.
17.Se engrasan los rodamientos.
18.Se ajustan las escobillas ó cambian para que puedan ejercer un mejor contacto al conmutador.
19.Se insertan los pernos de fijación con un apriete uniforme y considerado.
20.Si es necesario se aplica esmalte anticorrosivo a la carcaza ó envolvente.
21.Se realizan pruebas de funcionamiento e inspecciones periódicas al motor rehabilitado.
104

Figura 80. Extractor de poleas
105

Inspección General
Revisar el motor cada 500 horas de operación o cada 3 meses, lo que ocurra primero. Mantener el motor limpio y las aberturas para ventilación despejadas.
En cada inspección deberán efectuarse los siguientes pasos:
a) Verifique si el interior y exterior del motor se encuentran libres de suciedad, aceite, grasa, agua, etc. Puede haber acumulación de pulpa de papel, pelusas textiles, vapores aceitosos, etc., que bloquea la ventilación del motor. Si el motor no está debidamente ventilado, puede haber recalentamiento y provocar la falla prematura del motor.
b) Use periódicamente un “Megger” (megóhmetro) para asegurar que se haya mantenido la integridad del aislamiento en los devanados.
c) Revisar todos los conectores eléctricos para asegurar que estén bien apretados.
Lubricación y Cojinetes
La grasa de los cojinetes pierde su capacidad de lubricación a través del tiempo, o en forma repentina. La capacidad de lubricación de la grasa depende fundamentalmente del tipo de grasa, tamaño del cojinete, velocidad a la que funciona el cojinete y el rigor de las condiciones de operación.
Siguiendo las recomendaciones que se proporcionan a continuación, podrá obtener buenos resultados en su programa de mantenimiento.
Tipo de Grasa e Intervalos de Lubricación
Consultar el tipo de grasa que recomienda el fabricante para no rebasar la temperatura máxima de operación de los motores, asimismo, los intervalos de lubricación especificados de acuerdo a la velocidad de operación, tipo de cojinetes, rodillos o de bolas y condiciones de servicio como temperatura ambiente, contaminación atmosférica, etc., a la que es sometido dicho motor.
106
Procedimiento de Lubricación
Asegúrese que la grasa que está añadiendo al motor es compatible con la grasa que hay en el mismo.
a) Con tapón de salida de grasa
Limpie todos los accesorios de engrase.
Saque el tapón de salida de grasa.
Si el motor está parado, añada la cantidad de grasa que se recomienda.
Si el motor será engrasado mientras está en funcionamiento, deberá añadirse una cantidad ligeramente mayor de grasa. Añada la grasa lentamente hasta que aparezca la nueva grasa en el orificio del eje en la placa de fondo o el tapón de purgado.
Vuelva a colocar el tapón de salida de grasa.
b) Sin Tapón de salida de grasa
Limpie todos los accesorios de engrase.
Añada la cantidad de grasa que recomienda el fabricante.
Accesorios
A continuación se mencionan algunos accesorios que se pueden instalar en motores de reciente tecnología que permiten mejorar o proteger la operación adecuada del motor.
RTD y termopares para cojinetes
Utilizados para medir o monitorear la temperatura del cojinete del motor durante su operación.
Termostato del Cojinete
Dispositivo térmico que se activa cuando las temperaturas del cojinete son excesivas. Se utilizan con un circuito externo para dar advertencia de temperatura excesiva del cojinete o para parar un motor.
107

Cajas de Conexión
Hay cajas opcionales de conexión de varios tamaños para acomodar dispositivos accesorios.
Conjunto de Cordón y Enchufe
Cordón de alimentación y enchufe para utilizar en aplicaciones portátiles.
Vaciadores y Respiraderos
Se dispone de vaciadores de acero inoxidable con respiraderos por separado.
Tapas de Goteo
Diseñadas para usarse cuando el motor está montado en posición vertical.
Tapa de Ventilador y Filtro de Pelusas
Se utilizan para evitar la acumulación de desechos en el ventilador de enfriamiento.
Placa de Fábrica
Se dispone de placas de fábrica de acero inoxidable adicionales.
Cojinetes de Rodillos
Recomendables para las aplicaciones de accionamiento por correa con velocidad de 1800 r.p.m. o menos.
108

Etiquetas de Flechas de Rotación
Las flechas de rotación se suministran en los motores diseñados para operar en una sola dirección.
Calentador Unitario
Se instalan para evitar la condensación de humedad dentro de la caja del motor durante períodos de inactividad o almacenamiento.
Herrajes de Acero Inoxidable
Se dispone de herrajes de acero inoxidable. Los herrajes estándar son de acero zincado resistente a la corrosión.
RTD y Termopares para Devanados
Utilizados para medir o monitorear la temperatura del devanado del motor durante su operación.
Termostato del Devanado
Dispositivo térmico que se activa cuando las temperaturas del devanado son excesivas. Se utiliza con un circuito externo para dar advertencia de temperatura excesiva del devanado o para parar un motor.
Nota: En algunos motores, los cables para dispositivos accesorios salen a una caja de conexión diferente, ubicada al costado de la caja del motor (a menos que se especifique lo contrario).
109

CUADROS DE DIAGNÓSTICO Y CORRECCIÓN DE FALLAS
Síntoma Posibles causas Posibles soluciones
El motor no arranca
Causado usualmente por problemas en la línea, por
ejemplo el funcionamiento con una sola fase en el
arrancador.
Revise la fuente de alimentación: protectores de sobrecarga, fusibles,
controles, etc.
Zumbido excesivo
Alto voltaje. Revise las conexiones de la línea de entrada.
Entrehierro excéntrico (descentrado).
Haga reparar el motor en el centro de servicio recomendado por el fabricante
Recalentamiento del motor
Sobrecarga. Compare el Amperaje medido con su valor
nominal de placa.
Localice y quite lo que produce la fricción excesiva en el motor o la carga.
Reduzca la carga o reemplace el motor por uno de mayor capacidad.
Funcionamiento con una sola fase.
Revise la corriente en todas las fases (deberá ser aprox. igual) para aislar y
corregir el problema.
Ventilación inadecuada.
Revise el ventilador externo para asegurarse que el aire se mueve bien entre
las aletas de enfriamiento.Acumulación excesiva de suciedad en el
motor. Limpie el motor.
Voltaje desequilibrado.Revise el voltaje en todas las fases (deberá
ser aprox. igual) para aislar y corregir el problema.
El rotor roza el estator. Apriete los “pernos pasantes”.
Sobrevoltaje o bajo voltaje. Revise el voltaje de entrada en cada fase al motor.
El devanado del estator está abierto.
Revise si la resistencia del estator en las tres fases está equilibrada.
Devanado puesto a tierra. Efectúe una prueba dieléctrica y haga las reparaciones necesarias.
Conexiones incorrectas.
Revise todas las conexiones eléctricas para determinar si la terminación, la resistencia
mecánica y la continuidad eléctrica son adecuadas.
Consulte el diagrama de conexión de cables del motor.
110

Síntoma Posibles causas Posibles soluciones
Recalentamiento del cojinete
Mal alineamiento. Revise y alinee el motor y los equipos accionados por el mismo.
Excesiva tensión de correa.
Reduzca la tensión de correa a su punto apropiado para la carga.
Excesivo empuje terminal.
Reduzca el empuje terminal de la máquina accionada.
Exceso de grasa en el cojinete.
Saque grasa hasta que la cavidad esté unos 3/4 llena.
Insuficiente grasa en el cojinete.
Añada grasa hasta que la cavidad esté unos 3/4 llena.
Suciedad en el cojinete.Limpie el cojinete y la cavidad del cojinete.
Rellene con el tipo de grasa correcto hasta que la cavidad esté aproximadamente 3/4 llena.
Vibración
Mal alineamiento. Revise y alinee el motor y los equipos accionados por el mismo.
Roce entre las piezas rotativas y las piezas
fijasAísle y elimine la causa del rozamiento.
El rotor está desequilibrado.
Mande a revisar el equilibro del rotor y hágalo reparar en el Centro de Servicio recomendado
por el fabricante.
Resonancia.Sintonice el sistema o solicite asistencia al
Centro de Servicio recomendado por el fabricante.
RuidoMaterias extrañas en el
entrehierro o las aberturas de ventilación.
Extraiga el rotor y quite las materias extrañas.Vuelva a instalar el rotor. Revise la integridad
del aislamiento. Limpie las aberturas de ventilación.
Ruido retumbante ogimoteante
El cojinete está en malas condiciones.
Reemplace el cojinete. Quite toda la grasa de la cavidad y coloque el nuevo cojinete. Rellene
con grasa del tipo correcto hasta que la cavidad esté aproximadamente 3/4 llena.
Materiales empleados en el embobinado de motores
111

Aislamiento para motores
Los tipos de aislante usado en los motores está determinado por las condiciones o también en el que conductor se usará, el calor y el medio son los principales problemas, el calor excesivo ya sea por las condiciones externas o por altas corrientes, pueden provocar que el aislamiento se queme, esto puede producir corto circuito.
Para usar un aislante en un motor se deben considerar los siguientes factores:
Qué la sección del conductor pueda transportar la corriente necesaria. Qué la caída máxima de tensión no exceda los valores indicados por las normas.
Qué la temperatura del conductor no dañe.
Los aislamientos en un embobinado son muy importantes ya que de estos depende que la parte eléctrica no tenga ningún contacto con la parte de hierro del motor que provocarían cortos, que serian peligrosos para el operador.
Los aislamientos deben estar preparados para soportar determinadas temperaturas y proteger de humedad y polvo las bobinas.
En los embobinados podemos encontrar varios tipos de aislamientos como son:
Plásticos. Barnices.
Papel. Tubos de lino impregnados. Tubos de fibra de vidrio. Aislantes a base de silicones (Barniz).
Para motores que trabajen en condiciones de temperatura que sobrepasen los 40 ºC se recomienda el uso de aislantes de tela de vidrio y barnices a base de silicones., este mismo tiempo de aislantes se recomienda donde el ambiente es húmedo.
112

El aislante que es colocado entre las ranuras del estator lo podemos encontrar en tres tipos diferentes
1. Papel pescado 2. Coreco 3. Myllar
También se usa el espagueti la descripción de este aislante es un tubo formado de resinas aislantes y fibra de vidrio, el cual sirve para aislar los puntos de conexión entre las bobinas.
113

Barniz para acabado:
Este se usa cuando se esta seguro que el motor se encuentra listo para trabajar y ya se han hecho las pruebas correspondientes que comprueben su buen funcionamiento, ya que este barniz al secar hace que los alambres queden sujetos entre si endureciendo las bobinas, esto evita ruidos por alambres sueltos, vibración de un embobinado, y además actuar como una capa protectora además de dar una buena presentación de acabado a el embobinado.
Este barniz se encuentra en el mercado en color rojo o transparente, también hay barnices que secan a temperatura ambiente y otros que necesitan exponerse a altas temperaturas para lograr su secado.
Cuñas de madera:
Se colocan sobre la parte superior descubierta de la bobina y las paredes de la ranura., estas asientan las bobinas y al mismo tiempo las aprietan hacia el fondo de la ranura, también las protegen de un posible rozamiento con el rotor.
Alambre magneto:
Este alambre esta provisto de un barniz aislante que evita los cortos entre un alambre con otro.
Colocación de aislantes en el estator
Para este trabajo tenemos tres opciones que son:
Papel pescado Myllar
Coreco
Para este caso usaremos el myllar el cual es una mica plástica en presentación de diferentes calibres.
114
115
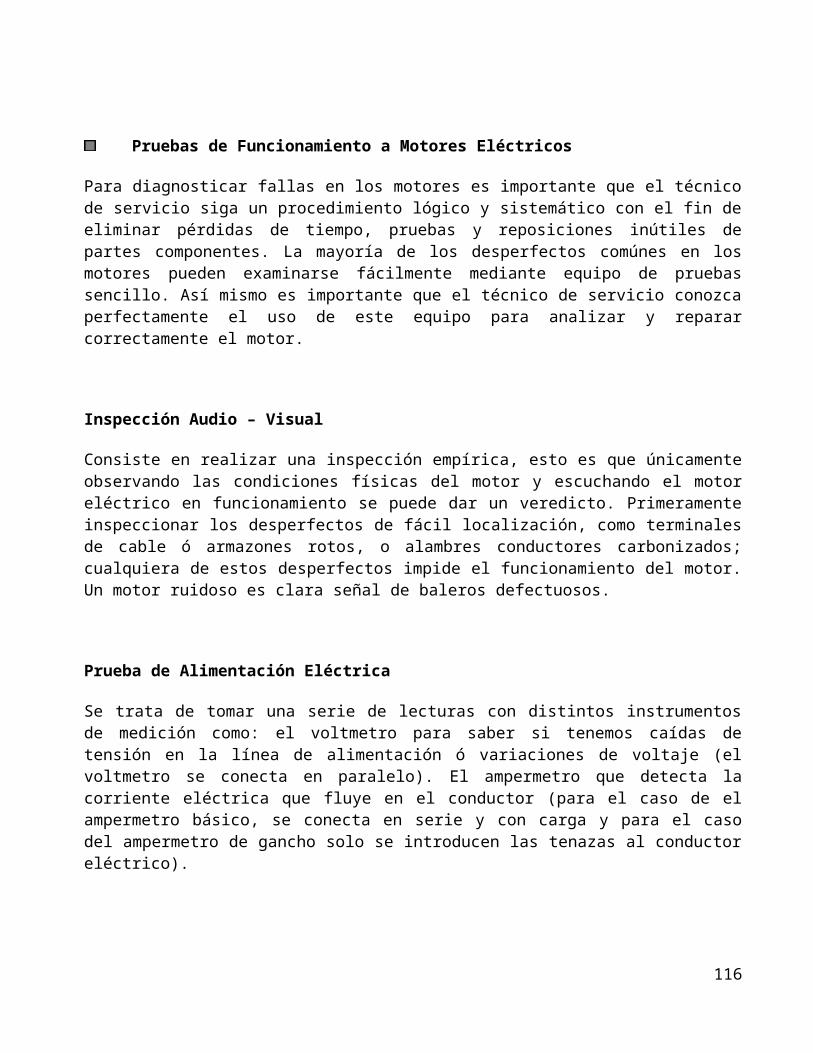
Motorreductores
Los Reductores y los Motorreductores son elementos mecánicos muy adecuados para el accionamiento de todo tipo de máquinas y aparatos de uso industrial, que se necesiten reducir su velocidad de una forma eficiente, constante y segura. Los reductores y motorreductores modelo comercial son apropiados para acoplar a toda clase de máquinas de velocidad reducida. De construcción totalmente cerrada.
El tornillo sin fin es de acero con tratamiento térmico adecuado y rectificado de flancos con la mayor precisión y pulimiento. La corona es fabricada en bronce de aleación para el modelo industrial. Cajas y tapas de fundición gris dotados de retenes para el aceite de un material resistente al mismo y los rodamientos ampliamente dimensionados y de primera calidad. El sentido de rotación del eje de salida puede girar indistintamente en un sentido u en otro. Las potencias indicadas han sido calculadas para un FACTOR DE SERVICIO* = 1.
Los reductores y motorreductores modelos comercial e industrial de tornillo sin fin, son apropiados para el accionamiento de toda clase de máquinas y aparatos de velocidad reducida. Están construidos totalmente cerrados con carcasas y tapas de fundición gris dotados de retenes de nitrilo - butadieno y rodamientos de bolas de primera calidad. La pintura utilizada es epóxica
En el trabajo diario en la industria es muy difícil que se den las condiciones idóneas para el trabajo de un elemento como un reductor o motorreductor. Por lo tanto, para calcular la potencia que debe tener un Reductor a acoplar a una determinada carga, la potencia requerida por la máquina accionada a través del reductor se debe multiplicar por el factor de servicio; el resultado se llamará potencia de elección. En algunos casos en más importante el PAR que puede dar un reductor que la potencia, por lo que en la elección se tendrá más en cuenta este PAR. Para el cálculo del factor de servicio se tendrán en cuenta las características específicas de trabajo a realizar, enumeradas en el apartado anterior.
116

Existen motorreductores para velocidades de accionamiento constantes con gran funcionalidad a través de diversas posibilidades de variación en la salida y opciones de motor. Los motorreductores con convertidor de frecuencia integrado permiten ajuste de velocidad a través de variadores de velocidad mecánicos.
Los piñones y engranes son de acero de alta calidad con dientes helicoidales coaxiales. Los engranes van ajustados a presión sobre sus respectivas flechas. El piñón de alta velocidad tiene una extensión integral que en la cual se acopla el motor. La unidad reductora viene provista con baleros SKF. La caja de engranes es de fierro fundido de alta calidad tratado con pintura anticorrosiva, con una última capa de esmalte epóxico.
La unidad reductora está normalmente lubricada con aceite. No obstante, puede lubricarse con grasa si existe una razón especial. Y para algunas posiciones especiales de montaje, es forzoso lubricar con grasa. La chumacera exterior en la flecha de salida se empaca con grasa. Un sello de aceite se intercala entre el motor y la caja de engranes. Una pasta selladora especial homogénea se usa en las uniones en vez de juntas.
El aceite lubricantes es requerido para limitar y controlar:
a) Fricción.b) El contacto de metal a metal.c) El sobrecalentamiento.d) El desgaste y la corrosióne) Los depósitos.
Para cumplir con estas funciones, el aceite lubricante deberá tener:
a) Una viscosidad conveniente.b) Oleosidad: para asegurar adherencia en los cojinetes.c) Alta resistencia de la película en los metales cuando existen cargas pesadas.d) Capacidad limpiadora para limpiar los residuos.e) Capacidad de dispersión para disolver y transportar cuerpos extraños.
RECOMENDACIONES PARA EL AHORRO DE ENERGÍA EN MOTORES ELÉCTRICOS
117
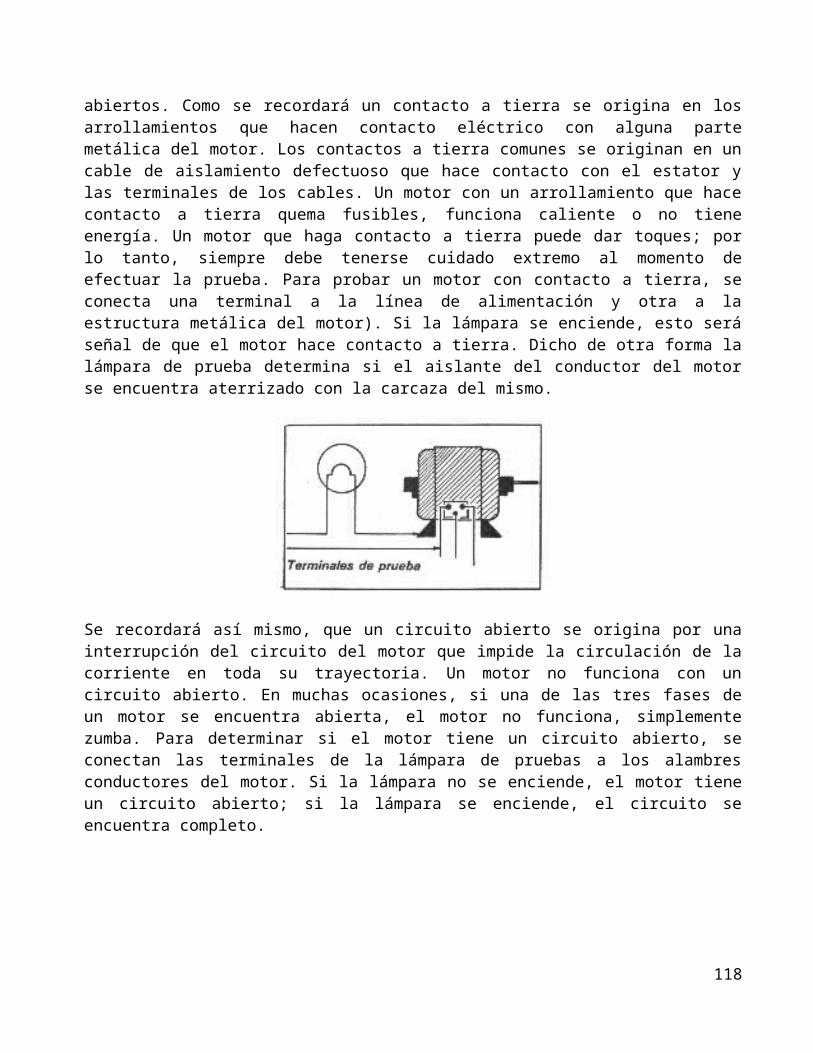
Introducción
Alrededor del 70% del consumo de la energía eléctrica generada se debe al funcionamiento de los motores eléctricos. Incontables ejemplos de su aplicación, se tienen en la industria, el comercio, los servicios y el hogar.
Es significativo el hecho de que los motores eléctricos, suministran en su mayor parte, la energía que mueve los accionamientos industriales, por lo que la operación y conservación de los motores en la industria, representa uno de los campos más fértiles de oportunidades en el ahorro de energía, que se traducen en una reducción en los costos de producción y en una mayor competitividad.
El ahorro de energía comienza desde la selección apropiada de los motores. Siempre hay uno adecuado a las necesidades que se tienen, tanto en lo que respecta a su tipo por condiciones ambientales de operación, por condiciones de arranque o regulación de velocidad, así como por su tamaño o potencia. Los mayores ahorros de energía eléctrica se obtienen cuando el motor y su carga operan a su máxima eficiencia.
Este fascículo contiene útiles recomendaciones para optimizar el consumo de energía en sus instalaciones con motores eléctricos. Los temas tratados son muy prácticos y recomiendan tener cuidado con las reparaciones, motivar al personal a ahorrar, corregir su factor de potencia y administrar la demanda de energía eléctrica.
¿Qué es la eficiencia en un motor?
La eficiencia o rendimiento de un motor eléctrico es una medida de su habilidad para convertir la potencia eléctrica que toma de la línea en potencia mecánica útil. Se expresa usualmente en porciento de la relación de la potencia mecánica entre la potencia eléctrica, esto es:
100eléctricaPotenciamecánicaPotencia
Eficiencia
No toda la energía eléctrica que un motor recibe, se convierte en energía mecánica. En el proceso de conversión, se presentan pérdidas, por lo que la eficiencia nunca será del 100%. Si las condiciones de operación de un motor son incorrectas o este tiene algún desperfecto, la magnitud de las pérdidas, puede superar con mucho las de diseño, con la consecuente disminución de la eficiencia.
118
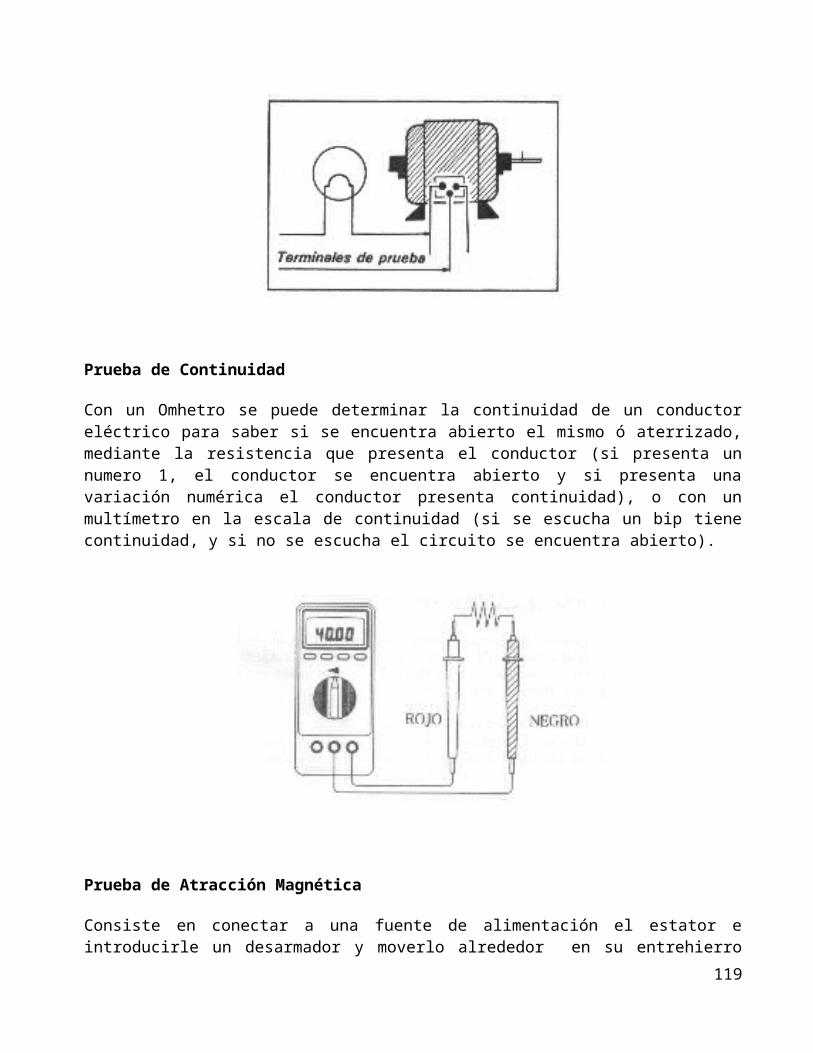
Para calcular la eficiencia, las unidades de las potencias deben ser iguales. Como la potencia eléctrica se expresa usualmente en kilowatts (kW) en tanto que la potencia mecánica en caballos de potencia (CP o HP), las siguientes equivalencias son útiles para la conversión de unidades:
1 CP = 0.746 kW
1 kW = 1.34 CP
Si un motor de 100 CP toma de la línea 87.76 kW:
Potencia mecánica = 100 x 0.746
= 74.6 kW
Eficiencia = 10076.876.74
= 85%
Pérdidas = 87.76 –74.6
13.16 kW
Esto es el motor convierte el 85% de su energía eléctrica en mecánica, perdiendo el15% en el proceso de conversión. En términos prácticos, se consume (y se paga) inútilmente la energía utilizada para hacer funcionar al motor.
Emplear motores de mayor eficiencia, reduce las pérdidas y los costos de operación. Por ejemplo si el motor anterior se sustituyera por otro con una eficiencia del 90%, la potencia ahorrada (PA) se puede calcular aplicando la siguiente ecuación:
2E100
1E100CP0.746kW)(PA
Donde:
0.746 = Factor de conversión de CP a kW
CP = Caballos de potencia
E1 = Eficiencia del motor de rendimiento menorE2 = Eficiencia del motor de rendimiento mayor
119
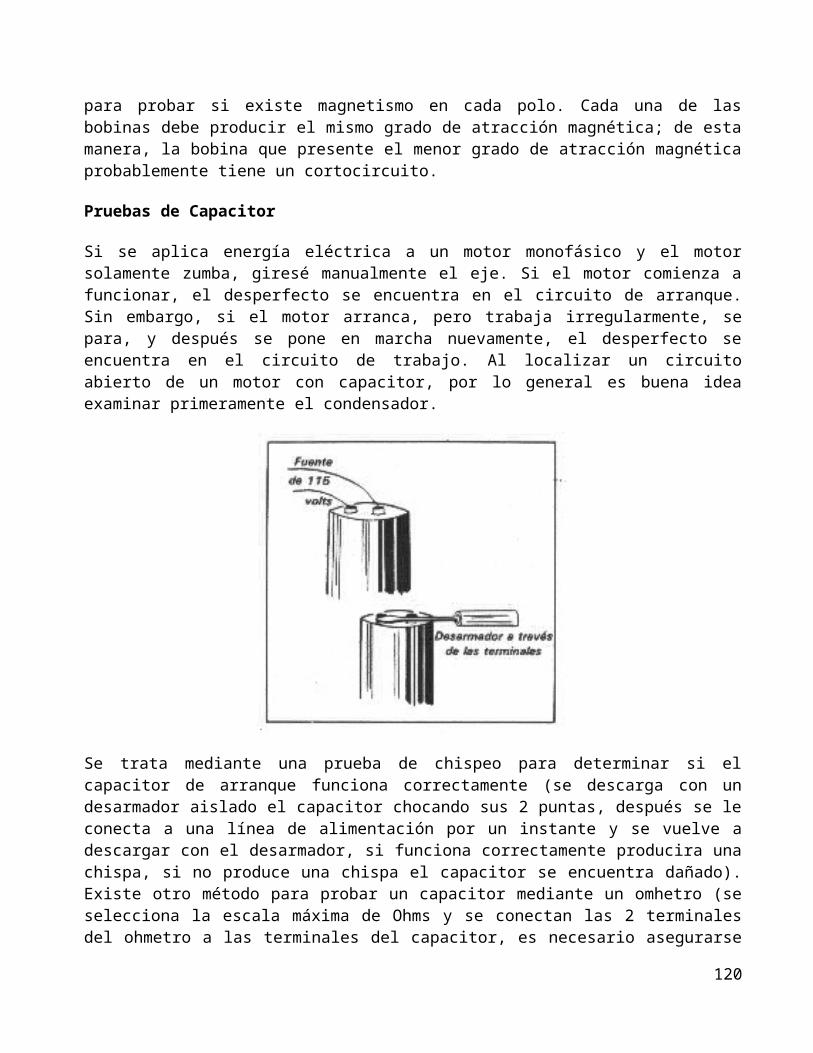
kW4.87kW90
10085
1000010.746PA
Suponga que ambos motores Trabajarán 12 horas diarias, 5 días de la semana y 50 semanas por año, que equivalen a 3000 horas al año. La energía ahorrada anualmente equivale a:
3000 horas x 4.87 = 4,610 kWh
Como ejercicio multiplíquese esta cantidad de kWh por el costo de la tarifa que corresponda al servicio que usted tenga y obtendrá el ahorro monetario por utilizar el motor de mayor eficiencia. Un motor bien diseñado puede tener un precio de compra elevado, pero generalmente tendrá una mayor eficiencia que el de motores de procedencia ignorada.
Los incrementos que han experimentado el costo de los energéticos a nivel mundial, han orientado a los fabricantes de motores a lograr principalmente motores de alta eficiencia, con rendimientos de hasta un 96% y cuyo costo adicional sobre los convencionales se puede pagar rápidamente con los ahorros que se tienen en el consumo. Vale la pena considerar su utilización.
Cuidado con las Reparaciones
La reparación inadecuada de un motor puede ocasionar un incremento en las pérdidas y adicionalmente en los motores de corriente alterna, la reducción del factor de potencia. Todo esto conduce a una disminución de su eficiencia.
Por ejemplo un motor que sufrió un desperfecto en su devanado y que por ello hay que rebobinarlo, puede disminuir su eficiencia considerablemente, si durante el proceso de reparación se presenta:
Calentamiento desmedido del hierro al quitar el devanado
Daños en las ranuras al quitar el devanado dañado y montar el nuevo
Diferente calidad y calibre del alambre
Diferente número de vueltas
Daños a los cojinetes y mal alineamiento.
Mayor tiempo de secado final.
120

Por esto es importante que cuando un motor sea reparado, los trabajos los efectúe personal calificado para garantizar que la compostura sea realizada correctamente y que los materiales empleados sean de calidad igualo superior a los originales.
La misma atención se debe prestar a las partes eléctricas del motor, como a los componentes mecánicos, tales como los cojinetes, el eje y el sistema de ventilación o enfriamiento. Con frecuencia los daños que sufren los devanados tienen su origen en desperfectos mecánicos.
Un motor mal reparado al ser instalado nuevamente, gastará más energía que antes. Cuando los daños sean mayores puede resultar más económico sustituir un motor que componerlo. Evalúe técnica y económicamente la posibilidad de hacerlo y si lo decide, utilice motores de alta eficiencia.
Motores Eléctricos y el Factor de Potencia
Los motores de inducción por su simplicidad de construcción, su velocidad prácticamente constante, su robustez y su costo relativamente bajo, son los motores más utilizados en la industria. Sin embargo, tienen el inconveniente de que aún en óptimas condiciones, consumen potencia reactiva (kVAR) por lo que son una de las causas principales del bajo factor de potencia en las instalaciones industriales.
El factor de potencia es indicativo de la eficiencia con que se está utilizando la energía eléctrica para producir un trabajo útil. Se puede definir como el porciento de la relación de la potencia activa (kW) y la potencia aparente o total (kVA).
100kVAkWpotenciadeFactor
Un bajo factor de potencia significa energía desperdiciada y afecta a la adecuada utilización del sistema eléctrico. Por esta razón en las tarifas eléctricas, se ofrece una reducción en las facturas de electricidad en instalaciones con un factor de potencia mayor del 90% y también se imponen cuotas a manera de multas si el factor de potencia es menor que la cifra señalada.
Un usuario operando con un factor de potencia de 80%, valor que se encuentra con frecuencia en instalaciones industriales, tiene que pagar un recargo del 7.5% sobre el monto de su cuenta de electricidad, recargo que puede alcanzar la cantidad de 120%, en el caso extremo de tener un factor de potencia del 30%.
Ya que Ios motores de inducción son una de las causas principales del bajo factor de potencia se pueden tomar las siguientes medidas con respecto a éstos para corregirlo:
121
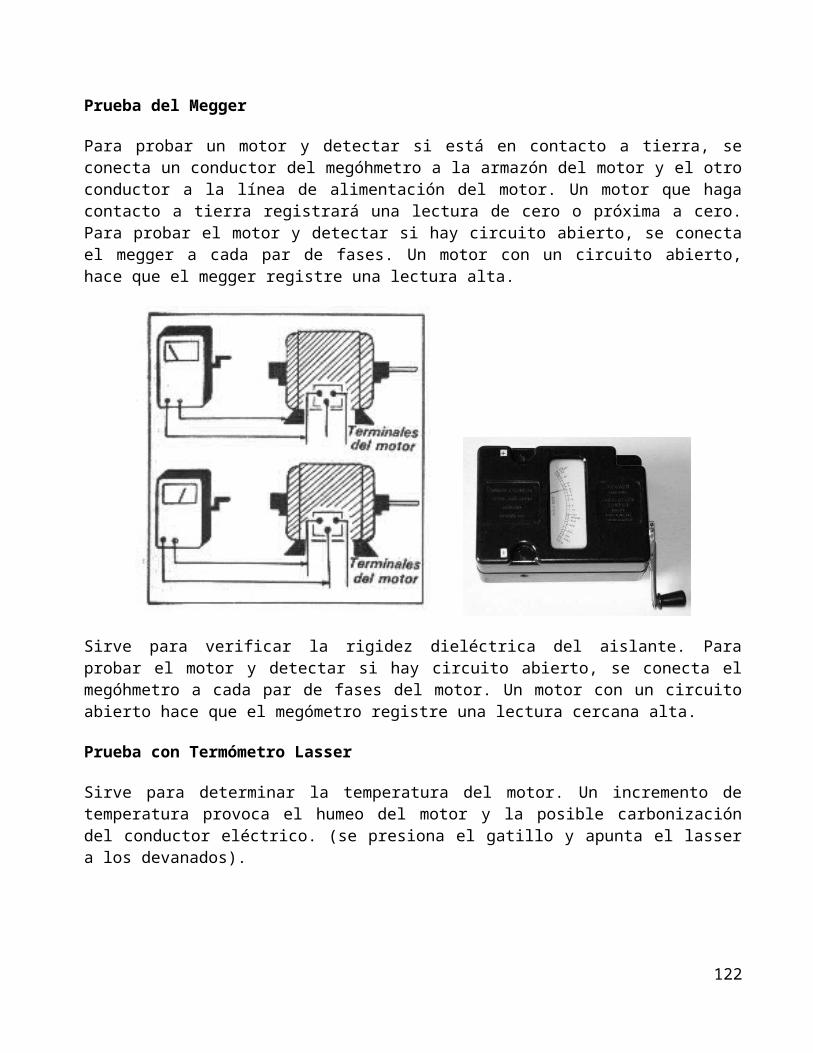
Selección justa del tipo, potencia y velocidad de los motores que se instalan
Empleo de motores trifásicos en lugar de monofásicos
Aumento de la carga de los motores a su potencia nominal (evitar sobredimensionamiento del motor)
Evitar el trabajo prolongado en vacío de los motores
Reparación correcta y de alta calidad de los motores
Instalación de capacitores en los circuitos con mayor número de motores o en los motores de mayor capacidad
Corregir el bajo FP en una instalación es un buen negocio, no sólo porque se evitarán los cargos en la facturación que esto origina sino porque los equipos operan más eficientemente, reduciendo los costos por consumo de energía.
Administración de la Demanda
Las tarifas eléctricas para la industria, además del cargo por consumo de energía (kWh), hacen un cargo por demanda máxima (kW), que es importante en la facturación. La demanda es registrada por un medidor conforme a la potencia de todos los motores, lámparas y otros aparatos eléctricos, funcionando simultáneamente durante un lapso de 15 minutos.
Evitar el arranque y la operación simultánea de los motores y otros equipos eléctricos sobre todo en el período de punta, lo que se traduce en ahorros significativos en monto de facturación. Por ejemplo considérese una instalación con una demanda de 700 kW que incluye la potencia de un grupo de motores de 50 CP que toman de la red 41 kW cada uno. Si este grupo de motores pudiera ser operado fuera del período de demanda máxima, el valor de la demanda se reduciría en casi 6%, lo cual representa una sensible reducción en el monto de facturación eléctrica.
Otra opción es la de extender los turnos de trabajo, repartiendo la operación de los motores y otros equipos en más horas de labores, fuera del período de punta.
Los cargos por consumo de energía eléctrica pueden ser prácticamente iguales pero por demanda máxima pueden reducirse de manera importante.
122

Motive al personal a ahorrar
Ahorrar energía es tarea de todos y de todos los días. Porque de no hacerlo quizás mañana ya no exista energía que ahorrar. Los resultados que se obtengan de cada empresa, en cada hogar, con cada usuario, contribuirán a asegurar un mejor futuro, particular y colectivo.
Establezca una campaña permanente de ahorro de energía en sus instalaciones, dentro de la cual es fundamental concientizar a su personal. Motívelo a que participe activamente y tome en cuenta sus opiniones y sugerencias. Muchas de ellas pueden representar verdaderas oportunidades de ahorro.
Un ejemplo de área de oportunidad
Como se ha mencionado, los mayores ahorros de energía se obtienen cuando el motor y su carga trabajan a su máxima eficiencia. Un ejemplo que presenta buenas oportunidades de ahorro, se tiene en los equipos de aire comprimido.
Las fugas de aire en uniones de tuberías y mangueras, válvulas de seguridad de los depósitos acumuladores, válvulas de corte (que hacen mal cierre) herramientas neumáticas y otros equipos, representan pérdidas de hasta un 50% en instalaciones descuidadas; constituyen una carga inútil del motor y un desperdicio de energía, que puede reducirse notoriamente, mediante la corrección y sellado sistemático de los puntos de escape.
Es primordial que la potencia del motor acoplado al equipo de compresión de aire corresponda a la potencia requerida por éste. La eficiencia cae bruscamente para cargas reducidas o cuando trabaja sobrecargado. Además un motor de inducción sobredimensionado, demandará una mayor potencia reactiva con la consiguiente disminución del factor de potencia.
123
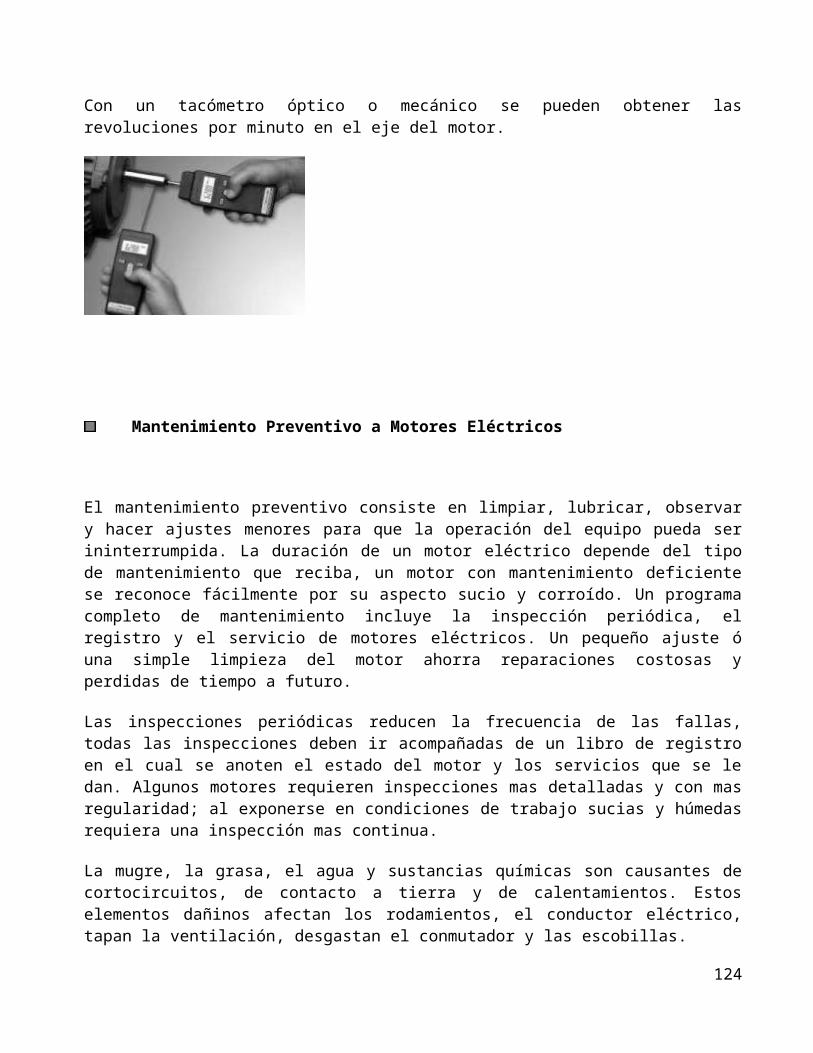
Recomendaciones Generales para el Ahorro de Energía en Motores Eléctricos
1. Elegir correctamente la potencia del motor. El rendimiento máximo se obtiene cuando éste opera entre el 75% y el 95% de su potencia nominal y cae bruscamente para cargas reducidas o cuando trabaja sobrecargado. Adicionalmente los motores de inducción a cargas bajas o en vacío tienen un factor de potencia muy bajo.
2. Seleccionar el motor de acuerdo con su ciclo de trabajo. Operar un motor para servicio continuo, en accionamientos de operación intermitente, con frecuentes arranques y paros, ocasiona una depreciación de sus características de operación y eficiencia. Además de que se puede dañar el aislamiento de los devanados por la elevación de la temperatura.
3. Seleccionar el armazón del motor, de acuerdo con el ambiente en que va a estar trabajando. Los motores abiertos son más sencillos y por lo tanto menos costosos, además de operar con mayor factor de potencia. Sin embargo, en condiciones adversas del medio, los motores cerrados serán los indicados.
4. Seleccionar correctamente la velocidad del motor. Si la carga lo permite prefiera motores de alta velocidad, son más eficientes y si se trata de motores de corriente alterna, trabajan con un mejor factor de potencia.
5. Utilizar motores de inducción trifásicos en Iugar de monofásicos. En motores de potencia equivalente, su eficiencia es de 3 a 5% mayor y su factor de potencia mejora notablemente.
6. Utilizar motores síncronos en lugar de motores de inducción. Cuando se requieren motores de gran potencia y baja velocidad la elección de un motor síncrono debe ser considerada.
Compite en costo con uno de inducción de características similares, su eficiencia es de 1 al 3% mayor, su velocidad es constante y contribuye a mejorar el factor de potencia de la instalación.
7. Sustituir los motores antiguos o de uso intenso. Los costos de operación y mantenimiento de motores viejos o de motores que por su uso han depreciado sus características de operación, pueden justificar su sustitución por motores normalizados y de alta eficiencia.
8. Efectuar correctamente la instalación eléctrica y el montaje de los motores y su carga. Las Normas Técnicas de Instalaciones Eléctricas en su capítulo referente a motores, y las recomendaciones de los fabricantes son consulta obligada para asegurar el funcionamiento adecuado de los equipos.
9. Realizar en forma correcta la conexión a tierra de los motores. Una conexión defectuosa o la ausencia de ésta, puede poner en peligro la vida de los operarios si se
124
presenta una falla a tierra. Además de ocasionar corrientes de fuga que no son liberadas por el equipo de protección con un dispendio de energía.
10. Evitar concentrar motores en locales reducidos o en lugares que puedan dificultar su ventilación. Un sobrecalentamiento del motor se traduce en una disminución de su eficiencia.
11. Corregir la caída de tensión en los alimentadores. Una tensión reducida en las terminales del motor, acarrea entre otros, un incremento de la corriente, sobrecalentamiento y disminución de su eficiencia. Las normas permiten una caída máxima del 3% (o del 5% en la combinación de alimentador y circuito derivado) pero es recomendable que no rebase el 1%.
12. Balancear la tensión de alimentación en los motores trifásicos de corriente alterna. El desequilibrio entre fases no debe excederse en ningún caso del 5%, pero mientras menor sea el desbalance, los motores operan con mayor eficiencia.
13. Compensar la energía reactiva demandada por los motores de corriente alterna más importantes o con mayor número de horas de funcionamiento, mejorando el factor de potencia de la instalación, con lo que se reducen las pérdidas de la potencia y de la tensión en los conductores.
14. Procurar que los motores síncronos funcionen con un factor de potencia cercano a la unidad, para mejorar el factor de potencia de la instalación.
15. Evitar hasta donde sea posible el arranque y la operación simultánea de motores, sobre todo los de mediana y gran capacidad, para disminuir el valor máximo de la demanda.
16. Utilizar arrancadores a tensión reducida, en aquellos motores que realicen un número elevado de arranques. Con esto se evita un calentamiento excesivo en los conductores y se logra disminuir las pérdidas durante la aceleración.
17. Utilizar arrancadores estrella-delta o de devanado partido, como alternativa de los arrancadores a tensión reducida cuando la carga impulsada no requiera de alto par de arranque. Son más económicos y eficientes en términos de energía, pero tienen el inconveniente de que el par de arranque se reduce notoriamente.
18. Sustituir en los motores de rotor devanado, los reguladores con resistencias para el control de la velocidad, por reguladores electrónicos más eficientes. En las resistencias se llega a consumir hasta un 20% de la potencia que el motor toma de la red.
19. Instalar arrancadores electrónicos en lugar de los reóstatos convencionales para el arranque de los motores de corriente directa. Permiten una mayor eficiencia en el arranque con el consiguiente ahorro de energía.
125
20. Sustituir motores con engranes, poleas, bandas u otro tipo de transmisión, para reducir la velocidad del motor, por motores de velocidad ajustable con reguladores electrónicos.
21. Instalar motores de velocidad ajustable con reguladores electrónicos, en aquellos accionamientos, en donde la carga sea variable y se pueda controlar ajustando la velocidad. Por ejemplo en sistemas de bombeo o compresión que deben suministrar caudales variables y que para hacerlo utilicen válvulas u otros dispositivos de control. La eficiencia total del motor y su carga se eleva notablemente con ahorros importantes de energía.
22. Evaluar la posibilidad de conectar la ventilación solamente durante las bajas velocidades, en aquellos motores de velocidad ajustable y ventilación separada provista por equipos auxiliares. Con esto se puede reducir el consumo de energía en el sistema de ventilación.
23. Preferir el acoplamiento individual, en accionamientos con un grupo de, motores, así se consigue mejor que cada motor trabaje lo más cerca posible de su máxima carga.
24. Acoplar directamente el motor a la carga siempre que el accionamiento lo permita. Con esto se evitan pérdidas en el mecanismo de transmisión.
25. Instalar acoplamientos flexibles en aquellos motores sometidos a un número elevado de arranques súbitos. Con esto se pueden atenuar los efectos de una alineación defectuosa, reducir los esfuerzos de torsión en la flecha del motor y disminuir las pérdidas por fricción.
26. Instalar equipos de control de la temperatura del aceite de lubricación de cojinetes de motores de gran capacidad a fin de minimizar las pérdidas por fricción y elevar la eficiencia.
27. Mantener en buen estado y correctamente ajustados los equipos de protección contra sobrecalentamientos o sobrecargas en los motores. Los protegen de daños mayores y evitan que operen con baja eficiencia.
28. Revisar periódicamente las conexiones del motor, junto con las de su arrancador y demás accesorios. Conexiones flojas o mal realizadas con frecuencia originan un mal funcionamiento del motor y ocasionan pérdidas por disipación de calor.
29. Mantener en buen estado los portaescobillas, escobillas, conmutadores y anillos colectores en motores de corriente directa, síncronos y de rotor devanado. Un asentamiento incorrecto de las escobillas sobre el conmutador en los anillos colectores, provoca sobrecalentamientos y pérdidas de energía.
126
30. Mantener bien ajustado y en óptimas condiciones el interruptor de arranque de los motores monofásicos de fase partida. El mal funcionamiento de este accesorio que se emplea para desconectar el devanado de arranque (y el condensador en los motores de arranque por condensador) provoca un sobrecalentamiento en los conductores con una pérdida de energía y en caso extremo la falla del motor.
31. Mantener en óptimas condiciones los sistemas de ventilación y enfriamiento de los motores, para evitar sobrecalentamientos que puedan aumentar las pérdidas en los conductores del motor y dañar los aislamientos.
32. Verificar periódicamente la alineación del motor con la carga impulsada. Una alineación defectuosa puede incrementar las pérdidas por rozamiento y en caso extremo ocasionar daños mayores en el motor y en la carga.
33. Reparar o cambiar los ejes del motor y de la transmisión, si se han doblado por sobrecarga o por mal uso. Un eje en mal estado incrementa las pérdidas por fricción y puede ocasionar daños severos sobre todo en los cojinetes del motor.
34. Mantener en buen estado los medios de transmisión entre el motor y la carga, tales como: poleas, engranes, bandas y cadenas. Si estos no se encuentran en condiciones apropiadas o su instalación es incorrecta, pueden ocasionar daños importantes, además de representar una carga inútil para el motor.
35. Mantener en óptimas condiciones los cojinetes del motor. Una cantidad considerable de energía se pierde en cojinetes en mal estado o si su lubricación es inadecuada (insuficiente o excesiva). Repárelos o sustitúyalos si tienen algún desperfecto y siga las instrucciones del fabricante para lograr una correcta lubricación.
36. Realizar la inspección periódica del motor, incluyendo lecturas de corriente, potencia (kW), velocidad (rpm), resistencia de aislamiento, etc., con objeto de verificar si se mantienen en condiciones apropiadas de funcionamiento y eficiencia, y poder tomar acciones correctivas, cuando se requieran.
37. Efectuar rutinariamente la limpieza del motor, con el propósito de eliminar la suciedad, el polvo y objetos extraños, que impidan su óptimo funcionamiento. La regularidad con que ésta se realice dependerá de las condiciones en las que el motor este trabajando, pero es recomendable desmontarlo al menos una vez al año para realizar la limpieza completa de todos sus componentes.
38. Mantener actualizados los manuales de operación de los motores, incorporando en éstos las modificaciones que tengan lugar.
39. Colocar carteles con instrucciones concretas para los operarios, con la finalidad de que los motores operen con la mayor seguridad y eficiencia.
ATENCIÓN: Es conveniente contar con un especialista que supervise los trabajos de instalación, reparación y operación de los motores y así lograr su óptimo funcionamiento.
127

FUENTE DE INFORMACIÓN
Recomendaciones para el ahorro de energía en motores eléctricos, FIDE. (Normas aplicables):
Normas Oficiales Mexicanas de Eficiencia Energética Vigentes
NOM-014-ENER-1997
Eficiencia energética de motores de corriente alterna, monofásicos, de inducción, tipo jaula de ardilla,
de uso general en potencia nominal de 0,180 a 1,500 kW. Límites, método de prueba y marcado.
nom-014-ener-1997.doc
NOM-016-ENER-2002
Eficiencia energética de motores de corriente alterna, trifásicos, de inducción, tipo jaula de
ardilla, en potencia nominal de 0,746 a 373 kW. Límites, método de prueba y marcado.
nom-016-ener-2002.doc
Norma Oficial Mexicana NOM-001-SEDE-1999
Instalaciones Eléctricas
Norma que establece las disposiciones y especificaciones técnicas que deben cumplir las
instalaciones eléctricas permitiendo así las condiciones de uso adecuadas para la seguridad
de las personas y su entorno. Esta Norma tiene su aplicación en instalaciones eléctricas de
propiedades industriales, comerciales, residenciales y de vivienda, tanto públicas como
privadas; incluyendo ferias, circos, estacionamientos, almacenes, equipo eléctrico, entre
muchas otras.
001SEDE.zip
128

National Electrical Manufacturers Association
NEMA Standards Publication MG 10-2001
Energy Management Guide For Selection and Use of Fixed Frequency
Medium AC Squirrel-Cage Polyphase Induction Motors
MG10.pdf
NEMA Standards Publication MG 11-2001
Energy Management Guide For Selection and Use of Single-Phase Motors
MG11.pdf
NEMA Standards Publication
Information Guide for General Purpose Industrial AC Small and Medium Squirrel-Cage Induction Motor Standards
MG1Condensed.pdf
NEMA Standards Publication MG 2-2001
Safety Standard and Guide for Selection, Installation, and Use of Electric Motors and Generators
MG2.pdf
Energy Policy Act Of 1992:
The Scope Of Electric Motors Subject To Efficiency Standards on October 24, 1997
motorbro.pdf
Comisión Nacional para el Ahorro de Energía
Dirección de Demanda Eléctrica
129


















