etm2021.cometm2021.com/sbiblioteca/Libros/AUTOMATIZACION Y...Presentación Allá por el año 2004,...
465
Transcript of etm2021.cometm2021.com/sbiblioteca/Libros/AUTOMATIZACION Y...Presentación Allá por el año 2004,...
-
3ª edición
Sistemas SCADAAquilino Rodríguez Penin
-
Sistemas SCADAAquilino Rodríguez PeninISBN: 978-84-267-1781-8, edición en español publicada por MARCOMBO, S.A., Barcelona, EspañaDerechos reservados © 2012 MARCOMBO, S.A.
Tercera edición: Alfaomega Grupo Editor, México, mayo 2013 © 2013 Alfaomega Grupo Editor, S.A. de C.V.Pitágoras 1139, Col. Del Valle, 03100, México D.F.
Miembro de la Cámara Nacional de la Industria Editorial MexicanaRegistro No. 2317
Pág. Web: http://www.alfaomega.com.mxE-mail: [email protected]
ISBN: 978-607-707-406-9
Derechos reservados:Esta obra es propiedad intelectual de su autor y los derechos de publicación en lengua española han sido legalmente transferidos al editor. Prohibida su reproducción parcial o total por cualquier medio sin permiso por escrito del propietario de los derechos del copyright.
Nota importante:La información contenida en esta obra tiene un fin exclusivamente didáctico y, por lo tanto, no está previsto su aprovechamiento a nivel profesional o industrial. Las indicaciones técnicas y programas incluidos, han sido elaborados con gran cuidado por el autor y reproducidos bajo estrictas normas de control. ALFAOMEGA GRUPO EDITOR, S.A. de C.V. no será jurídicamente responsable por: errores u omisiones; daños y perjuicios que se pudieran atribuir al uso de la información comprendida en este libro, ni por la utilización indebida que pudiera dársele.
Edición autorizada para venta en México y todo el continente americano.
Impreso en México. Printed in Mexico.
Empresas del grupo:México: Alfaomega Grupo Editor, S.A. de C.V. – Pitágoras 1139, Col. Del Valle, México, D.F. – C.P. 03100Tel.: (52-55) 5575-5022 – Fax: (52-55) 5575-2420 / 2490. Sin costo: 01-800-020-4396E-mail: [email protected]: Alfaomega Colombiana, S.A. – Calle 62 No. 20-46, Barrio San Luis, Bogotá, Colombia Tels.: (57-1) 746 0102 / 210 0415 – E-mail: [email protected]: Alfaomega Grupo Editor, S.A. – Av. Providencia 1443. Oficina 24, Santiago, ChileTel.: (56-2) 2235-4248 – Fax: (56-2) 2235-5786 – E-mail: [email protected]: Alfaomega Grupo Editor Argentino, S.A. – Paraguay 1307 P.B. Of. 11, C.P. 1057, Buenos Aires, Argentina – Tel./Fax: (54-11) 4811-0887 y 4811 7183 – E-mail: [email protected]
Datos catalográficosRodríguez, AquilinoSistemas SCADATercera Edición
Alfaomega Grupo Editor, S.A. de C.V., MéxicoISBN: 978-607-707-406-9
Formato: 17 x 23 cm Páginas: 472
-
A Victoria, Héctor y Martí, que me han dejado parte de su tiempo para que pueda terminar esta revisión del libro.
A Cristina, que bastante aguanta.
¡Qué paciencia habéis tenido! (otra vez)
-
Presentación Allá por el año 2004, nació la idea de compilar en un sólo libro parte de la información existente acerca de los sistemas Scada, ampliamente desperdigada en varios idiomas y soportes. Esta tercera edición incluye una revisión exhaustiva y varias correcciones sugeridas por los lectores, así como temas nuevos, tales como las nuevas tecnologías de pantallas, directivas de seguridad como la FDA CFR 21 – Parte 11, o una guía de inicio al software Vijeo Citect, que incluye instrucciones de descarga para poder empezar a trabajar inmediatamente con el mismo. He intentado hacer un libro ameno y práctico, apropiado para estudiantes, ya sean de Ciclos Formativos o de nivel universitario, donde puedan encontrar información útil, ya sea en el propio libro, o en los enlaces y referencias que se citan. En el primer capítulo se hace un repaso general para poner al día a cualquier lector no familiarizado con el tema. El segundo capítulo se centra en la estructura y los componentes de estos sistemas, detallando las funciones y características de cada uno de ellos. La Guía de Diseño proporciona, de forma práctica, las indicaciones y consejos básicos relacionados con el diseño de interfases gráficas Ordenador-Persona teniendo en cuenta las normativas existentes. En el cuarto capítulo se presentan los conceptos de seguridad relacionados con estos sistemas. Se incluye un apartado dedicado a la FDA 21 CFR Parte 11, directiva implantada en Estados Unidos y convertida en un referente mundial a la hora de desarrollar aplicaciones o sistemas de control seguros y fiables. El quinto capítulo es un extracto de mi libro Comunicaciones Industriales, publicado también por la Editorial Marcombo. En éste aparece una introducción a los buses de comunicación industrial y una breve descripción de los más conocidos. El último capítulo es una guía básica para ayudar a dar los primeros pasos con el programa Vijeo Citect, de Schneider Electric. Se trata de una guía eminentemente práctica para poder realizar los primeros pasos en el diseño de una aplicación de visualización con estos programas. Se incluyen las instrucciones necesarias para descargar el programa y proceder a su instalación. Pues nada, a ver qué le parece al lector, espero que lo disfrute.
Aquilino Rodríguez Penin Ingeniero Técnico de Telecomunicaciones
-
Agradecimientos Me gustaría expresar mi gratitud a las diferentes personas que me han proporcionado material técnico y a las empresas y organismos que han permitido incluir su material y/o referencias en este libro, proporcionándole así un valor añadido que no hubiera podido alcanzar por otros medios. En concreto a: Citect Corporation (Schneider Electric) Festo Pneumatic, S.A.U. Instituto Nacional de Seguridad e Higiene en el Trabajo, INSHT ITAIGUM S.L. Schneider Electric S.A. SIEMENS S.A. Wonderware (Scada InTouch) También agradezco los comentarios recibidos sobre el contenido y la presentación del libro. Esto me ha permitido revisar ciertos aspectos e incluir algún tema nuevo, como las directrices de la Food and Drug Administration (CFR 21, Parte 11, relacionado con las aplicaciones Scada y los sistemas de control industrial). A los amigos de las fotocopias también les agradecería que se tomasen la molestia de pensar si hoy en día merece la pena, por el coste y la calidad, fotocopiar un libro en vez de comprarlo… (Espero de corazón que no estés leyendo una fotocopia…). ¡Gracias a todos! Espero que al cerrar el libro le quede al lector la sensación de haber aprovechado bien el tiempo empleado en leerlo. Todas las marcas de producto que se citan en el libro son marcas registradas por sus respectivos propietarios. En todas las referencias de producto se hace mención explícita de sus propietarios. Incluso en los casos en los cuales no se mencione explícitamente, no quiere decir que dichos productos, aplicaciones o soluciones, no estén debidamente protegidos bajo las leyes de propiedad industrial o de derechos de autor.
-
ndice de contenidos 1 SISTEMAS SCADA .............................................................................................................. 1-1
1.1 UN POCO DE HISTORIA ............................................................................................ 1-2 1.2 LA EVOLUCIÓN ....................................................................................................... 1-6 1.3 EL CONCEPTO DE CONTROL .................................................................................. 1-10 1.4 LOS SISTEMAS DE VISUALIZACIÓN ........................................................................ 1-11 1.5 LAS PRIMERAS INTERFASES HOMBRE-MÁQUINA ................................................... 1-15 1.6 EL SISTEMA SCADA .............................................................................................. 1-16
1.6.1 Objetivos ......................................................................................................... 1-17 1.6.2 Prestaciones .................................................................................................... 1-18 1.6.3 Ventajas ........................................................................................................... 1-20 1.6.4 El entorno ........................................................................................................ 1-21
1.7 CRITERIOS DE SELECCIÓN Y DISEÑO ...................................................................... 1-23 1.8 ARQUITECTURA GENERAL DE UN SISTEMA SCADA ............................................. 1-29
1.8.1 El hardware ..................................................................................................... 1-30 1.8.1.1 Interfase Hombre-Máquina (HMI, MMI) ........................................................... 1-31 1.8.1.2 Unidad central (MTU, Master Terminal Unit) ................................................... 1-32 1.8.1.3 Unidad Remota (RTU, Remote Terminal Unit) ................................................. 1-33
1.8.2 Sistema de comunicación ................................................................................ 1-35 1.8.2.1 Topologías .......................................................................................................... 1-36 1.8.2.2 Seguridad ............................................................................................................ 1-37
1.8.3 El software ...................................................................................................... 1-39 1.8.4 Comunicación entre aplicaciones ................................................................... 1-42 1.8.5 Almacenamiento de datos ................................................................................ 1-46
1.9 COMPONENTES DE UN SISTEMA SCADA ................................................................. 1-48 1.9.1 Configuración ................................................................................................. 1-48 1.9.2 Interfase Gráfica ............................................................................................. 1-49 1.9.3 Tendencias....................................................................................................... 1-50 1.9.4 Alarmas y Eventos ........................................................................................... 1-51 1.9.5 Registro y Archivado ....................................................................................... 1-52 1.9.6 Generación de Informes .................................................................................. 1-53 1.9.7 Control de Proceso.......................................................................................... 1-54 1.9.8 Recetas ............................................................................................................ 1-55 1.9.9 Comunicaciones .............................................................................................. 1-55
1.10 TECNOLOGÍAS DE COMUNICACIÓN ENTRE APLICACIONES ..................................... 1-56 1.10.1 ¡Oh, un objeto! ........................................................................................... 1-57 1.10.2 La Saga ActiveX ......................................................................................... 1-59
1.10.2.1 DDE ................................................................................................................... 1-59 1.10.2.2 OLE .................................................................................................................... 1-61 1.10.2.3 OCX (OLE Controls) ......................................................................................... 1-62 1.10.2.4 ActiveX .............................................................................................................. 1-63
1.10.3 OPC ............................................................................................................ 1-64 1.10.3.1 Definición de OPC ............................................................................................. 1-65 1.10.3.2 La idea básica ..................................................................................................... 1-66 1.10.3.3 Tecnología .......................................................................................................... 1-67 1.10.3.4 Cliente y Servidor OPC ...................................................................................... 1-68 1.10.3.5 Especificaciones OPC ........................................................................................ 1-68 1.10.3.6 Comparativas ...................................................................................................... 1-70
1.11 EL MAYOR SISTEMA SCADA DEL MUNDO BASADO EN WINDOWS ........................ 1-71
-
2 NORMATIVA ...................................................................................................................... 2-1 2.1 FACTORES DE RIESGO DE LOS TRABAJADORES “PRIVILEGIADOS” ............................ 2-3 2.2 MEDIDAS PREVENTIVAS .......................................................................................... 2-4 2.3 TRASTORNOS ASOCIADOS AL PUESTO ..................................................................... 2-5
2.3.1 La vista .............................................................................................................. 2-5 2.3.1.1 Factores de percepción visual ............................................................................... 2-6 2.3.1.2 Mecanismos de ajuste de la visión ....................................................................... 2-7 2.3.1.3 Las causas: la pantalla .......................................................................................... 2-7 2.3.1.4 Las causas: los reflejos ......................................................................................... 2-8 2.3.1.5 Los efectos ......................................................................................................... 2-11 2.3.1.6 Recomendaciones ............................................................................................... 2-11
2.3.2 La postura ....................................................................................................... 2-11 2.3.2.1 Las causas: posturas ........................................................................................... 2-12 2.3.2.2 Las causas: estatismo .......................................................................................... 2-12 2.3.2.3 Los efectos ......................................................................................................... 2-13 2.3.2.4 Recomendaciones ............................................................................................... 2-14
2.3.3 La piel ............................................................................................................. 2-14 2.3.4 La mente .......................................................................................................... 2-15
2.3.4.1 Las bases ............................................................................................................ 2-15 2.3.4.2 Carga Mental de Trabajo .................................................................................... 2-16 2.3.4.3 Factores que intervienen ..................................................................................... 2-17 2.3.4.4 Recomendaciones ............................................................................................... 2-18
2.4 LA REGLAMENTACIÓN .......................................................................................... 2-19 2.4.1 Real Decreto 488/1997 .................................................................................... 2-20
2.4.1.1 Artículo 1 - Objeto ............................................................................................. 2-21 2.4.1.2 Artículo 2 – Definiciones ................................................................................... 2-22 2.4.1.3 Artículo 3. Obligaciones generales del empresario ............................................ 2-22 2.4.1.4 Artículo 4 - Vigilancia de la salud ...................................................................... 2-23 2.4.1.5 Artículo 5 - Obligaciones en materia de información y formación ..................... 2-23 2.4.1.6 Artículo 6 - Consulta y participación de los trabajadores ................................... 2-24
2.4.2 Los usuarios .................................................................................................... 2-24 2.5 LA ERGONOMÍA .................................................................................................... 2-26
2.5.1 Requerimientos ergonómicos del RD. 488/97 ................................................. 2-27 2.5.1.1 Mesa y espacio de trabajo ................................................................................... 2-28 2.5.1.2 La silla ................................................................................................................ 2-29 2.5.1.3 Teclado, reposamuñecas y ratón ........................................................................ 2-30 2.5.1.4 La pantalla .......................................................................................................... 2-31 2.5.1.5 Iluminación ........................................................................................................ 2-37 2.5.1.6 Ruido .................................................................................................................. 2-39 2.5.1.7 Temperatura y humedad ..................................................................................... 2-41 2.5.1.8 Emisiones electromagnéticas .............................................................................. 2-42 2.5.1.9 Interconexión ordenador-persona ....................................................................... 2-43
2.6 PANTALLAS - BASES TÉCNICAS ............................................................................. 2-50 2.6.1 Pantallas de tubo de rayos catódicos .............................................................. 2-51 2.6.2 Pantallas planas: LCD .................................................................................... 2-52 2.6.3 Pantallas planas: Plasma - PDP ..................................................................... 2-53 2.6.4 LED ................................................................................................................. 2-54 2.6.5 OLED y más .................................................................................................... 2-54 2.6.6 Especificaciones generales.............................................................................. 2-55
2.6.6.1 Definición ........................................................................................................... 2-55 2.6.6.2 Frecuencia de refresco ........................................................................................ 2-55 2.6.6.3 Relación de Contraste ......................................................................................... 2-56 2.6.6.4 Resolución .......................................................................................................... 2-56
-
2.6.6.5 Tiempo de respuesta ........................................................................................... 2-57 2.7 NORMATIVA RELACIONADA .................................................................................. 2-57
2.7.1 De aplicación española ................................................................................... 2-57 2.7.2 De referencia ................................................................................................... 2-58
3 GUÍA DE DISEÑO ................................................................................................................. 3-1 3.1 ENTORNO NORMATIVO............................................................................................ 3-2 3.2 EL SENTIDO DE LA VISTA ........................................................................................ 3-4
3.2.1 Los colores ........................................................................................................ 3-4 3.2.2 Las zonas de visión ............................................................................................ 3-6
3.3 CONCEPTOS BÁSICOS .............................................................................................. 3-9 3.4 COLOR Y FORMA COMO FUENTES DE INFORMACIÓN .............................................. 3-11
3.4.1 ¿Cómo estamos? ............................................................................................. 3-11 3.4.2 ¿Algo va mal? ................................................................................................. 3-13 3.4.3 ¿Alguien lo ve diferente? ................................................................................. 3-18
3.5 PRINCIPIOS DE SEÑALIZACIÓN .............................................................................. 3-19 3.5.1 Señales de Seguridad ...................................................................................... 3-19 3.5.2 Marcado de conductos .................................................................................... 3-22 3.5.3 Señalización acústica ...................................................................................... 3-26
3.6 RECOMENDACIONES DE DISEÑO ............................................................................ 3-29 3.6.1 Planteamiento práctico ................................................................................... 3-30 3.6.2 Principios básicos de diseño ........................................................................... 3-31 3.6.3 Norma ISO 9241 ............................................................................................. 3-32 3.6.4 Elementos gráficos .......................................................................................... 3-35
3.6.4.1 El color de las pantallas ...................................................................................... 3-35 3.6.4.2 El fondo de pantalla ............................................................................................ 3-37 3.6.4.3 Ubicación de elementos ...................................................................................... 3-38 3.6.4.4 Dibujar objetos ................................................................................................... 3-40 3.6.4.5 El cuadro sinóptico ............................................................................................. 3-42 3.6.4.6 Simulaciones ...................................................................................................... 3-45 3.6.4.7 Letras y números ................................................................................................ 3-46 3.6.4.8 Representación de valores .................................................................................. 3-49
3.7 LA INTERFASE DE CONTROL .................................................................................. 3-51 3.7.1 DIRECTIVA 98/37/CE .................................................................................... 3-52
3.7.1.1 Órganos de accionamiento ................................................................................. 3-52 3.7.1.2 Puesta en marcha ................................................................................................ 3-60 3.7.1.3 Parada normal ..................................................................................................... 3-61 3.7.1.4 Selección de Modos de marcha .......................................................................... 3-61
3.7.2 Convenciones de diseño .................................................................................. 3-63 3.7.2.1 Coherencia y consistencia .................................................................................. 3-63 3.7.2.2 Acciones y efectos .............................................................................................. 3-65 3.7.2.3 Colores de indicadores y mandos ....................................................................... 3-68 3.7.2.4 Posición de indicadores y mandos ...................................................................... 3-70
3.7.3 Animaciones .................................................................................................... 3-72 3.7.4 Navegación ...................................................................................................... 3-73
3.8 BIBLIOGRAFÍA ...................................................................................................... 3-77 4 LA SEGURIDAD ................................................................................................................... 4.1
4.1 INTEGRACIÓN CORPORATIVA.................................................................................. 4.2 4.2 INTRUSIÓN EN SISTEMAS DE CONTROL .................................................................... 4.5 4.3 PUNTOS DÉBILES ................................................................................................... 4.10
4.3.1 La puesta en marcha ....................................................................................... 4.10
-
4.3.2 Los Datos ........................................................................................................ 4.11 4.3.3 Política de Seguridad ...................................................................................... 4.12 4.3.4 Arquitectura .................................................................................................... 4.13 4.3.5 Comunicaciones .............................................................................................. 4.14 4.3.6 Plataformas ..................................................................................................... 4.15
4.4 AMENAZAS ........................................................................................................... 4.16 4.4.1 Categorías ....................................................................................................... 4.17 4.4.2 ¿Existen realmente? ........................................................................................ 4.18 4.4.3 Intrusión electrónica ....................................................................................... 4.21 4.4.4 Los responsables ............................................................................................. 4.23
4.5 POLÍTICAS DE SEGURIDAD..................................................................................... 4.23 4.5.1 El comienzo ..................................................................................................... 4.24 4.5.2 El ciclo de la Seguridad .................................................................................. 4.24 4.5.3 Técnicas de Prevención ................................................................................... 4.26 4.5.4 Estrategias de defensa ..................................................................................... 4.29
4.6 LAS “RECOMENDACIONES” .................................................................................. 4.36 4.6.1 Sobre los accesos a la red ............................................................................... 4.37 4.6.2 Sobre el sistema informático ........................................................................... 4.39 4.6.3 Sobre las personas .......................................................................................... 4.42
4.7 LA FDA 21 CFR PARTE 11 ................................................................................... 4.45 4.7.1 Requisitos de la FDA 21 CFR Part 11 ............................................................ 4.48 4.7.2 Terminología ................................................................................................... 4.50 4.7.3 CFR21 Apartado 11, Subapartado B - Documentación electrónica ............... 4.53
4.7.3.1 B11.10 Controles para sistemas cerrados .................................................... 4.53 4.7.3.2 B11.30 Controles para sistemas abiertos ..................................................... 4.61 4.7.3.3 B11. 50 Requerimientos para la firma. .......................................................... 4.61 4.7.3.4 B11.70 Vinculación de firmas electrónicas a registros ................................ 4.61
4.7.4 CFR21 Apartado 11, Subapartado C - Firma electrónica .............................. 4.62 4.7.4.1 C11.100 Requisitos generales para firmas electrónicas ............................. 4.62 4.7.4.2 C11.200 Controles y componentes de la firma electrónica ........................ 4.63 4.7.4.3 C11.300 Controles para identificación, códigos/contraseñas. ................... 4.64
4.7.5 Ejemplos prácticos: ......................................................................................... 4.65 4.7.5.1 Interfase gráfica ................................................................................................ 4.65 4.7.5.2 Control con PLC ................................................................................................ 4.69
4.7.6 Referencias ...................................................................................................... 4.70 5 COMUNICACIONES INDUSTRIALES ...................................................................................... 5.1
5.1 CONCEPTOS ............................................................................................................ 5.2 5.2 TRANSPORTE DE SEÑAL .......................................................................................... 5.4 5.3 SISTEMAS DE TRANSMISIÓN DE LA SEÑAL ............................................................... 5.7
5.3.1 Niveles de tensión .............................................................................................. 5.7 5.3.2 Bucle de corriente ............................................................................................. 5.9 5.3.3 Señal modulada ............................................................................................... 5.10
5.4 CONCEPTOS BÁSICOS ............................................................................................ 5.11 5.4.1 Modos de transmisión de datos ....................................................................... 5.11 5.4.2 Codificación de señales .................................................................................. 5.12 5.4.3 Protocolos de comunicación ........................................................................... 5.12 5.4.4 Tipos de redes según forma (Topología) ......................................................... 5.14 5.4.5 Formas de comunicación ................................................................................ 5.19 5.4.6 Modos de diálogo ............................................................................................ 5.20 5.4.7 Relaciones entre estaciones............................................................................. 5.21
-
5.4.7.1 Modos de comunicación ...................................................................................... 5.21 5.4.7.2 Formas de organización de nodos ....................................................................... 5.22
5.4.8 Entradas y Salidas ........................................................................................... 5.23 5.4.9 Tiempo real ..................................................................................................... 5.24
5.5 ACCESO A LA RED ................................................................................................. 5.26 5.5.1 Modelo de referencia OSI ............................................................................... 5.26
5.5.1.1 Nivel 1- Capa Física (Physical Layer) ................................................................. 5.28 5.5.1.2 Nivel 2 – Capa de Enlace de Datos (Data Link Layer) ........................................ 5.29 5.5.1.3 Nivel 3 - Capa de Red (Network Layer) .............................................................. 5.32 5.5.1.4 Nivel 4 – Capa de Transporte (Transport Layer) ................................................. 5.33 5.5.1.5 Nivel 5 – Capa de Sesión (Session Layer) ........................................................... 5.33 5.5.1.6 Nivel 6 – Capa de Presentación (Presentation Layer) .......................................... 5.33 5.5.1.7 Nivel 7 – Capa de Aplicación (Application Layer) ............................................ 5.34
5.5.2 El estándar ISA / SP50 .................................................................................... 5.35 5.5.2.1 Capa 1 ................................................................................................................ 5.36 5.5.2.2 Capa 2 ................................................................................................................ 5.37 5.5.2.3 Capa 7 ................................................................................................................ 5.38
5.5.3 El Protocolo CIP (Common Industrial Protocol) ........................................... 5.39 5.5.3.1 Características .................................................................................................. 5.40 5.5.3.2 Sumario .............................................................................................................. 5.43
5.6 COMUNICACIONES MEDIANTE BUSES DE CAMPO .................................................. 5.44 5.6.1 La pirámide de la automatización (CIM) ........................................................ 5.45 5.6.2 Requisitos de un bus de Campo ....................................................................... 5.47 5.6.3 Buses de Campo .............................................................................................. 5.49
5.6.3.1 MAP/TOP ........................................................................................................... 5.49 5.6.3.2 Interbus .............................................................................................................. 5.52 5.6.3.3 Modbus .............................................................................................................. 5.57 5.6.3.4 Hart ..................................................................................................................... 5.60 5.6.3.5 Fieldbus Foundation ......................................................................................... 5.63 5.6.3.6 AS-i ..................................................................................................................... 5.67 5.6.3.7 Profibus .............................................................................................................. 5.77 5.6.3.8 CAN .................................................................................................................... 5.82 5.6.3.9 DeviceNET ......................................................................................................... 5.88 5.6.3.10 ControlNet .......................................................................................................... 5.92 5.6.3.11 Ethernet .............................................................................................................. 5.97 5.6.3.12 Sumario ............................................................................................................ 5.107
6 VIJEO CITECT ..................................................................................................................... 6.1 6.1 CARACTERÍSTICAS PRINCIPALES ............................................................................. 6.2 6.2 DESCARGA E INSTALACIÓN DEL PROGRAMA ........................................................... 6.4 6.3 ESTRUCTURA DEL PROGRAMA ................................................................................ 6.7 6.4 OPERACIONES BÁSICAS CON EL EXPLORADOR ........................................................ 6.8 6.5 CONFIGURACIONES BÁSICAS ................................................................................. 6.10
6.5.1 Servidores ........................................................................................................ 6.10 6.5.2 Dispositivos ..................................................................................................... 6.11 6.5.3 Configuración del ordenador .......................................................................... 6.13 6.5.4 Creación de variables discretas y analógicas ................................................. 6.15
6.6 EL EDITOR DE GRÁFICOS ....................................................................................... 6.17 6.6.1 Creación de páginas gráficas.......................................................................... 6.17 6.6.2 Elementos gráficos simples ............................................................................. 6.19 6.6.3 Elementos gráficos animados .......................................................................... 6.22 6.6.4 Inserción y dinamización de imágenes ............................................................ 6.23
-
6.7 EL RUNTIME ......................................................................................................... 6.24 6.8 ENTRADA Y VISUALIZACIÓN DE DATOS ................................................................. 6.25
6.8.1 Visualización gráfica ....................................................................................... 6.25 6.8.2 Mando deslizante ............................................................................................ 6.26 6.8.3 Visualización de valores numéricos ................................................................ 6.27 6.8.4 Entrada de datos numéricos ............................................................................ 6.27
6.9 GRÁFICAS DE TENDENCIA ..................................................................................... 6.28 6.10 SEGURIDAD ........................................................................................................... 6.31
6.10.1 Creación de un usuario .............................................................................. 6.32 6.10.2 Protección de objetos: Privilegios ............................................................. 6.32 6.10.3 Protección de objetos: Áreas ...................................................................... 6.33
6.11 ALARMAS ............................................................................................................. 6.34 6.12 GENIOS ................................................................................................................. 6.39
6.12.1 Utilización de un genio ............................................................................... 6.40 6.12.2 Creación de un genio .................................................................................. 6.41
6.13 ENLACES Y FEEDBACK .......................................................................................... 6.45 7 GLOSARIO ......................................................................................................................... 7.1
-
1-1
Sistemas SCADA 1
1 Sistemas Scada Basándonos en la universal Ley del mínimo esfuerzo, conocida sobradamente por todos, podríamos enfocar los logros tecnológicos como la consecuencia de no querer cansarnos más de lo necesario. En el caso de la informática, su nacimiento y evolución se deberían a la necesidad de querer automatizar el cálculo matemático y a no querer contar con los dedos.
Hacia el 2000 a. de C. ya se tiene constancia de la existencia de cierto tipo de ábacos. En sus orígenes, consistía en una serie de piedras (piedra = cálculo, operaciones con piedras = calcular) que se colocaban en surcos hechos en el suelo. El ábaco se considera una de las primeras máquinas para la realización de operaciones de cálculo, aún vigente hoy en día. El uso del ábaco en Europa, muy extendido hasta la Edad Media, queda relegado al olvido con la incursión del sistema de numeración decimal por parte de los árabes.
-
1-2
Sistemas SCADA 1
1.1 Un poco de historia En 1614 John Napier (1550-1617), matemático escocés, da a conocer los logaritmos o números artificiales, como él los llamaba. Gracias a estos números, las multiplicaciones se convierten en sumas, las potencias en productos, y las raíces en divisiones, simplificando enormemente los cálculos matemáticos (por ejemplo, para multiplicar dos números se suman sus logaritmos y del resultado se busca el antilogaritmo). En 1620 Edmund Gunther (1581-1626), profesor de astronomía, inventó el método que lleva su nombre, colocando una escala logarítmica sobre una regla. Tres años más tarde, William Oughtret (1574-1660), mediante dos reglas de Gunther que se deslizaban una sobre otra, inventó la primera regla de cálculo. Fue muy utilizada hasta los años setenta, momento en el cual la calculadora electrónica toma protagonismo. En 1642, Blaise Pascal (1623-1662), materializa la primera calculadora mecánica, la Pascalina. Los principios utilizados por Pascal, en lo que se refiere a mecanismos y engranajes, siguen utilizándose hoy en día. Son los principios de funcionamiento del cuentakilómetros de los vehículos y las cajas registradoras o sumadoras mecánicas y tienen las siguientes características:
- Los dígitos se encadenan de forma automática mediante sistemas de enganche.
- Para restar se invierte el sentido de los engranajes utilizados para sumar. - Multiplicación y división se consiguen mediante sumas y restas repetidas.
En 1694 Wilhelm Leibnitz (1646-1716), basándose en los principios utilizados por Pascal, inventó una máquina capaz de sumar, restar, multiplicar y dividir. Ya en 1679 escribía sobre la idoneidad de aplicar el sistema binario al cálculo mecánico. Hasta este momento todo era más o menos manual, por lo cual el siguiente paso era lógico. Los primeros procesadores Charles Babbage (1791-1871), matemático inglés y catedrático en Cambridge, inventó una máquina capaz de calcular tablas matemáticas, la Máquina de Diferencias. En 1834, mientras trabajaba en la mejora de su máquina, concibió la idea de una máquina capaz de realizar tareas de cálculo de propósito general (suma, resta, multiplicación y división) de forma automática. Dicha máquina tendría capacidad para realizar hasta sesenta operaciones por minuto y podría almacenar hasta mil números de cincuenta cifras. Recibió el nombre de “La locura de Babbage”, debido a las enormes dificultades que implicaba su puesta en práctica. Las tolerancias exigidas
Fig. 1.1 John Napier
-
1-3
Sistemas SCADA 1
sobrepasaban el nivel de la tecnología de la época y no pudo ser llevada a la práctica por ser demasiado grande y demasiado complicada. Entre 1847 y 1849, Babbage diseñó la segunda máquina de diferencias. Construida en 1985 por el Science Museum of Kensington, está compuesta por cuatro mil piezas y pesa unas tres toneladas. De todas formas, las ideas implicadas en dicho proyecto son de aplicación actual en los modernos ordenadores (memoria, control de programas secuenciales e impresión). En 1801, Joseph-Marie Jackard (1753-1834) inventó el telar automático. Estaba controlado mediante tarjetas de madera perforadas, que determinaban el diseño del tejido deseado. En 1833, Augusta Ada Lovelace, hija del conocido poeta Lord Byron, oye hablar de la máquina de diferencias. Se dice que fue la única persona que al ver la máquina
comprendió su funcionamiento y las implicaciones que podría tener. Acaba convirtiéndose en colaboradora de Babbage y es la que sugiere la adaptación del sistema de tarjetas perforadas aplicado en el telar de Jackard para que la máquina pudiera realizar ciertas tareas de forma repetitiva. Los primeros ordenadores que empezaron a parecerse a los actuales funcionaban basándose en este tipo de tarjetas. Eran de cartulina y contenían partes de programa escritas en forma de perforaciones distribuidas en filas y columnas (10 filas x 80 columnas). En 1890 se realizó el censo de los Estados Unidos utilizando el sistema de tarjetas perforadas desarrollado por Herman Hollerith (1860-1929). El último censo, realizado en
1880, tardó ocho
años en completarse y ya se calculaba que el próximo censo, el de 1890, tardaría más de diez años en realizarse. Mediante este nuevo método el plazo se redujo a tres años, con el consecuente ahorro de dinero (unos cinco millones de dólares de la época), además de tiempo. Este fue el primer proceso automatizado de datos.
Fig. 1.2 Charles Babbage
Fig. 1.3 Lady Augusta
Ada Lovelace
Fig. 1.4 Tarjeta perforada
-
1-4
Sistemas SCADA 1
Las tarjetas perforadas de Hollerith se basaban en una idea aplicada por algunas líneas ferroviarias donde los expendedores marcaban las tarjetas con agujeros en lugares que describían los rasgos de los pasajeros (color del pelo, de los ojos, etc.), a modo de tarjeta de identificación. Como muchas de las preguntas podían contestarse con SI o NO, diseñó una tarjeta que contestaba a estas preguntas mediante unas perforaciones situadas en lugares predeterminados. En concreto, las perforaciones se alineaban en ochenta columnas. Con esta idea Hollerith fundó la Tabulating Machine Company y vendió sus productos en todo el mundo. En 1919 la compañía anuncia la aparición de la primera máquina impresora, hecho que revoluciona completamente la forma en que las compañías hacían sus operaciones. En 1924, la compañía cambia de nombre y adopta la denominación de una de las compañías absorbidas: International Business Machines Corporation (IBM) Las primeras Interfases de Operador eran teletipos conectados a ordenadores o a otros equipos. No eran muy rápidos (1200bps) pero llegaban muy lejos. Podemos decir, atendiendo a las modas actuales, que un teletipo era una máquina de escribir “trucada” que, además, podía leer tarjetas perforadas.
Acerca del número de columnas, parece ser que el número 80 respondía a que la mayoría de las máquinas de escribir y los monitores de ordenador sólo podían representar este número de caracteres por fila (¿un vestigio de las tarjetas perforadas?). Hoy en día la mayoría de las pantallas o los mensajes de información muestran vestigios de este hecho. Aunque las pantallas de caracteres son cada vez más escasas, podemos encontrar todavía Interfaces de Operador con líneas de una cantidad de caracteres con múltiplos y submúltiplos de este número (20, 40, 80, 120). En la fotografía podemos observar un Panel de Operador OP7, de Siemens, con cuatro líneas de veinte columnas.
Fig. 1.5 Herman Hollerith
Fig. 1.6 Panel de Operador SIMATIC OP7 (Siemens)
-
1-5
Sistemas SCADA 1
Los primeros ordenadores En 1936 Alan Turing demostró que una máquina podría aprender y con ello nació el concepto de inteligencia artificial. Durante la Segunda Guerra Mundial participó en el proyecto Colossus; una máquina capaz de descifrar los mensajes generados por su contendiente alemán: Enigma (no faltan películas bélicas ambientadas en la época con estas máquinas como parte del escenario). En 1947 publicó el libro Maquinaria Inteligente, en el cual aparece la denominada Prueba de Turing: «Si no podemos distinguir entre un interlocutor vivo y una máquina, ésta puede ser considerada como inteligente». En 1937 Claude E. Shanon describe la utilización de la lógica simbólica y los números binarios y apunta sobre la conveniencia de la aplicación del álgebra de Boole. En 1948, en los laboratorios Bell, publica la Teoría matemática de la comunicación, rebautizada más tarde como Teoría de la Información. Aquí aparece, por primera vez, el término BIT (Binary Digit, Dígito Binario). En 1938 Konrad Zuse, ingeniero civil alemán, construye en el comedor de su casa, de forma autodidacta, una calculadora electromecánica para que le ayude en los cálculos de fatiga de materiales de aviación en la empresa Henschel, donde trabaja. Era la Z1, completamente electromecánica, basada en aritmética binaria y capaz de leer tarjetas perforadas. El Doctor John Vincent Atanasoff, catedrático de la Universidad de Iowa y Clifford Berry, estudiante graduado, desarrollaron oficialmente la primera computadora digital (ABC, Atanasoff Berry Computer) entre 1936 y 1942. Era una máquina de propósito general para la resolución de ecuaciones lineales en la cual se incluían conceptos como la Unidad Aritmética y la Memoria Cíclica. En 1939, la Universidad de Harvard e IBM construyen uno de los primeros computadores electromecánicos: el MARK I, operativo en 1944. Tardaba tres décimas de segundo en restar o sumar veintitrés dígitos y era la realización física de la famosa “Locura de Babbage”, una máquina de cálculo automática. Por encargo del ejército estadounidense, se desarrolló un ordenador para el cálculo de trayectorias de tiro. Se terminó en 1946 y fue bautizado con el nombre de Integrador y Computador Numérico Electrónico, ENIAC (Electronic Numerical Integrator And Computer). Mil veces más veloz que sus antecesores electromecánicos, como el MARK I, pesaba treinta toneladas, tenía casi 18.000 válvulas (además de resistencias, bobinas y condensadores), un sistema de programación decimal con más de 6.000 interruptores y periodos de programación de semanas (mediante cableado, como las primeras centralitas telefónicas atendidas por operadora), ENIAC marcó el inicio de la era de las computadoras.
Fig. 1.7 Mantenimiento del
ENIAC (ENIAC, U.S. Army Files)
-
1-6
Sistemas SCADA 1
En 1945 el matemático húngaro John Von Neumann se interesó por el método de programación del ENIAC. Esta computadora se tenía que cablear físicamente y este proceso podía durar días. Von Neumann propuso una serie de mejoras, utilizadas hasta hoy. Entre ellas:
- Utilizar el sistema binario para programar, en vez del decimal. - Colocar las instrucciones, junto con los datos, en la memoria del ordenador.
El primer ordenador que funcionó con este principio, en 1949, se llamó EDVAC (Electronic Discrete-Variable Automatic Computer). Utilizaba la aritmética binaria. Los programas almacenados en memoria aumentaron en gran medida la fiabilidad y flexibilidad de estas máquinas. Ahora sólo era necesario cambiar el programa a ejecutar sin necesidad de realizar más cambios en la máquina. En 1951 se construye en la Universidad de Illinois el ORDVAC (Ordnance Variable Automatic Computer), basado en la máquina de Von Neumann. En 1951, la compañía Universal Computer saca al mercado la primera computadora comercial, UNIVAC I, cuyo primer cliente, fue la Oficina del Censo de los Estados Unidos. El siguiente paso fue desarrollar un método para introducir los datos de forma práctica. Es decir, en vez de utilizar ceros y unos, encontrar la manera de introducir los datos de programa en una especie de lenguaje fácilmente interpretable por las personas. Son los programas intérpretes. En 1952, la oficial de la Marina estadounidense Grace Murray Hoper, desarrolló el primer programa que traducía las órdenes humanas, parecidas al inglés, a código binario. Le dieron el nombre de Common Business Oriented Language (COBOL).
1.2 La evolución A partir de este punto se suceden una serie de hechos relacionados con la tecnología electrónica que convierten al desarrollo informático en una loca carrera hacia delante. Se llegaron a inventar tecnologías que quedaban obsoletas al poco tiempo, a veces en cuestión de meses. En este momento empiezan las llamadas Generaciones de las Computadoras, delimitadas entre sí por algún tipo de revolución tecnológica: Primera generación (1951-1958) En 1904, Sir Ambrose Fleming construye el primer tubo de vacío o Diodo, ya que se componía de dos elementos. En 1906, Lee De Forest modifica el diodo de vacío de Fleming, introduciendo una rejilla de control que permitía regular el paso de la corriente principal mediante una corriente muy pequeña en la rejilla. Descubría así el principio de amplificación electrónica. El diodo se convierte en tríodo y, por su forma, se pasa a llamar bulbo o válvula. Las primeras computadoras estaban construidas a base de estos tubos de vacío o válvulas que sustituían a los mecanismos electromecánicos.
-
1-7
Sistemas SCADA 1
Los datos de programación se introducían en la máquina mediante tarjetas perforadas, donde se escribían en un código especial denominado lenguaje máquina. La forma de almacenamiento se efectuaba mediante tambores giratorios, en los cuales se escribía y leía mediante marcación magnética. Esta tecnología sería el fundamento de los discos magnéticos actuales. En 1947, se termina en Estados Unidos la que se considera la primera computadora digital: ENIAC, de tipo experimental. En 1949 basándose en una serie de mejoras sobre ENIAC, se construye EDVAC, provista de memoria programable. La primera computadora comercial, UNIVAC I, se utilizó para elaborar el censo de los Estados Unidos en 1950. Esta vez, IBM, que tenía el monopolio del procesamiento de datos basado en tarjetas perforadas, no consiguió el contrato.
A partir de este momento IBM entró en la fabricación de computadoras electrónicas. En 1953, con el modelo IBM 701 y, en 1954, con el modelo IBM 650. Esta compañía consiguió asentar las bases de su éxito entre las grandes compañías privadas y las organizaciones gubernamentales. En 1955, aparece la primera red informática de la mano de IBM. Denominada SABRE, su función es la de comunicar ordenadores comerciales.
En 1957, surgió de los militares la idea de crear una red de ordenadores distribuidos geográficamente de tal forma que pudieran mantener una estructura operativa ante ataques enemigos, se llamó ARPA y con los años ha evolucionado hasta convertirse en lo que hoy es Internet. En 1951 J.W. Forrester descubre la memoria de toroides magnéticos. Se empiezan a desarrollar utilidades que permitan simplificar la forma de programar. Son los programas intérpretes, también llamados lenguajes de alto nivel. Aparece, en 1958, la primera versión del lenguaje ALGOL (ALGOrithmic Language), llamado ALGOL 58. Fue diseñado por un comité internacional con la idea de convertirlo en un lenguaje universal. Segunda generación (1959-1964) En 1947 aparece el transistor, gracias a los trabajos de los físicos Walter Brattain, William Shockley y John Bardeen, de los laboratorios Bell. Su funcionamiento es similar al de la válvula de vacío, pero necesita mucha menos tensión de alimentación y la corriente que utiliza es mínima. Esto permite una reducción de tamaño y consumo y un aumento de velocidad de proceso.
Ahora, en vez de tambores giratorios, se utiliza la memoria basada en núcleos magnéticos, donde pueden colocarse datos y programas. Se compone de unos toroides de material magnético, entrelazados con cables. Gracias al principio de remanencia es posible marcar un valor en un toroide, que se puede leer más tarde y recuperar la información escrita en el mismo (un 1 o un 0).
-
1-8
Sistemas SCADA 1
Las computadoras aún son de uso específico. Sirven para el proceso de datos o para cálculos matemáticos, pero no para las dos cosas.
El lenguaje COBOL, desarrollado durante la primera generación, ya está disponible comercialmente. Ahora los programadores no necesitan conocimientos de hardware y pueden centrar sus esfuerzos en los programas propiamente dichos. FORTRAN y COBOL se definen como lenguajes de programación orientados a los negocios. En 1957, IBM fabrica el primer disco magnético: RAMAC 650. Douglass Engelbart, en 1960, crea un dispositivo capaz de mover un puntero en la pantalla con capacidades de interfase (arrastrar, seleccionar etc.) Se trata el precursor del ratón, con algo más de un kilogramo de peso. Ahora el uso de los ordenadores se diversifica en múltiples campos: reservas de vuelos, simulaciones, inventarios o nóminas, por poner sólo unos ejemplos. Aparece Honeywell como primer competidor en este ámbito.
DEC (Digital Electric Corporation) crea su primer ordenador en 1959. El PDP1 (Programmable Data Processor-1) se puso a la venta por 120.000 dólares en un momento en que los ordenadores similares costaban un millón de dólares. El lenguaje de programación BASIC (Beginner’s All-purpose Symbolic Instruction Code) se crea en el Dartmouth College, en 1964. Fue diseñado con la idea de que todos los estudiantes pudieran trabajar con ordenadores sin necesidad de ser matemáticos o científicos. Tercera generación (1964-1971) En 1958 Jack Kilby, de Texas Instruments, construyó el primer circuito integrado, con nada menos que ¡seis transistores hechos sobre la misma placa!. Actualmente, un procesador Pentium contiene más de cinco millones de transistores… Gracias al circuito integrado se reduce aún más el tamaño de los equipos, se disminuyen sus requerimientos energéticos y se aumenta todavía más la velocidad de proceso. Este nuevo elemento permitió incrementar la flexibilidad de los programas que, a partir de entonces, serían los que determinarían la finalidad del equipo. Y, así, empezaron a aparecer las máquinas de serie estandarizadas.
Aparece el concepto de multitarea gracias a la gran capacidad de proceso de los nuevos equipos y un nuevo método permite mejorar la comunicación con la máquina, se trata de una utilidad que realiza tareas de intérprete: el Sistema Operativo. La compañía IBM, en 1964, produce la serie 360, que sustituía los transistores de la serie 700 por circuitos integrados. Esta serie de computadoras empleaba agrupaciones de ocho bits, dándose el nombre de Byte a este tipo de organización de memoria.
La firma DEC (Digital Equipment Corporation), para diversificar mercado, dirige sus miras a la fabricación de equipos más pequeños, conocidos como minicomputadoras.
-
1-9
Sistemas SCADA 1
Cuarta generación (desde 1971)
La miniaturización en el campo electrónico hace posible la aparición del microprocesador y los chips de memoria. Los núcleos de ferrita desaparecen, sustituidos por los chips de silicio y el desarrollo de técnicas para aumentar la escala de integración en los componentes permite integrar más componentes en la misma superficie, VLSI (Very Large Scale of Integration, Muy alta escala de integración), cientos de miles de transistores en un solo chip. En 1969 la empresa japonesa BUSICOM, junto con Intel Corporation, comienza el desarrollo de un circuito integrado que reúna todas las funciones básicas de proceso para aplicar en una calculadora de mesa de bajo coste. También ese año se aborda el estudio sobre las memorias magnéticas de burbuja. En 1971 pone a la venta el INTEL4004 y aparece, en 1972, la CPU INTEL8008. En 1972 aparece la CPU 8080, que revolucionó el mercado de los microprocesadores al poder ser aplicada en múltiples productos. En este micro corría el sistema operativo CP/M (Control Program for Microcomputers), desarrollado por Digital Research. Los usuarios de los autómatas Siemens de la serie 5 seguramente lo recuerdan.
En 1972, IBM lanza el disco flexible o floppy disk. En 1976 Stephen Wozniak y Steven Jobs inventan la primera microcomputadora de uso general y fundan Apple Computers en 1977. También, en este año, la empresa Zilog lanza uno de los mayores competidores del Intel 8080, el Z-80. En 1978, Intel lanza el primer microprocesador de 16 BIT: el 8086
En 1981, IBM sacó a la venta el modelo IBM PC (IBM Personal Computer), la computadora ideal para uso personal. De aquí viene el nombre adoptado como estándar. Basado en el Intel8088, disponía de una memoria RAM de 1Mb, cantidad considerada más que grande para la época. Se le conocerá por PC-XT (8MHz).
En 1984 aparece la CPU 80286, llamada PC-AT.
En 1988, IBM presenta el ordenador personal IBM PS/2 (con la CPU 80386). El mercado del ordenador personal empieza a ganar auge al bajar los precios.
En 1991 aparece la CPU Intel80486, Motorola saca la CPU 68040 y la alianza de Apple, IBM y Motorola da origen al PowerPC, basado en tecnología RISC (Reduced Instruction Set Computer, Computadores con un conjunto reducido de instrucciones).
En 1993 Intel comercializa el 80586 o Pentium.
-
1-10
Sistemas SCADA 1
1.3 El concepto de Control Cualquier sistema controlado puede serlo de dos maneras, si nos ceñimos a los caminos de la información dentro del mismo: - Confiando absolutamente en que los parámetros de diseño son correctos y que
las órdenes que enviemos al sistema serán cumplidas. - Vigilando continuamente que las órdenes enviadas se cumplen y realizando las
correcciones adecuadas siempre que sea necesario.
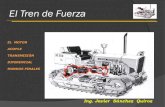
Fig. 1.8 Control en Lazo Cerrado
Todos los sistemas de control que se engloban dentro del primer modelo reciben el nombre de Sistemas de Regulación en Lazo Abierto. Se basan en el diseño adecuado de los parámetros y las condiciones de trabajo del elemento control para que éste sea capaz de mantener el sistema controlado dentro de los límites deseados. A los que se engloban dentro de la segunda definición, se les denomina Sistemas de Regulación en Lazo Cerrado o Realimentados, y trabajan vigilando continuamente las reacciones del sistema a controlar, efectuando las acciones de corrección necesarias para mantener el control dentro de los límites deseados. Por ejemplo, en tareas de posicionado de ejes eléctricos, cuando se utiliza un motor de paso a paso, tenemos un sistema de lazo abierto. No hay información real de dónde está el actuador, se parte de un punto conocido, llamado punto de referencia, y se trabaja a partir de ahí, confiando en que el motor no perderá pasos y podrá mover el actuador de manera fiable. Si lo que utilizamos es un motor con captador de posición (encoder), tendremos entonces información real del estado del motor (¿se mueve?), componiendo así un lazo cerrado de control. El sistema más seguro se basa en la vigilancia, por tanto, los sistemas de control que requieren fiabilidad (todos, si es posible), utilizarán la regulación en lazo cerrado. El sistema básico de control en lazo cerrado se ha representado siempre con ese señor que lleva ya varias décadas sujetando una llave que controla el paso de vapor de una caldera, atento al manómetro que le indica la presión de la tubería. La idea básica es muy simple, pero llevarla a la práctica puede no serlo tanto:
-
1-11
Sistemas SCADA 1
- Puede haber varias llaves de paso controladas por varias personas con
condicionantes diferentes (externos e internos). - La relación causa-efecto puede no ser directa. - Los sensores pueden no ser iguales. - Los actuadores, tampoco.
¿Qué circula entre el controlador y el controlado? Algo que llamamos información. La información puede definirse como cualquier tipo de energía que pueda ser emitida y, después, detectada. En sistemas de control, la información sufre tres cambios:
1. Es producida por el sistema a controlar, e interpretada por medio de diferentes elementos denominados sensores.
2. Se transmite hacia el sistema de control, donde es procesada y da lugar a una nueva información.
3. Se emite y codifica, de manera que puede ser introducida en el sistema mediante unos convertidores que denominamos actuadores.
El individuo, como parte de este proceso, recibe estímulos (información) de diferentes fuentes, que debe saber ponderar e interpretar para poder realizar su cometido:
- De los sistemas de Proceso (máquinas). - Del entorno de trabajo. - De los medios disponibles para realizar sus funciones (herramientas). - Del resultado del Proceso.
Todas estas entradas de información son procesadas a través de los sentidos, que son los elementos sensores del individuo. Básicamente, a nivel industrial se hará uso intensivo, por orden de importancia, de la vista, el oído y el tacto. Nos vamos a centrar principalmente en el aspecto visual de la aplicación de supervisión, pues la vista es el sentido más explotado en el intercambio de información con el sistema de control.
1.4 Los sistemas de visualización Alrededor de los años sesenta, la tendencia en automatización era que cada fabricante debía resolver sus problemas de control por sí solo. Quien se encontraba ante un problema de automatización desarrollaba un elemento electrónico específico para solventarlo. Una memoria reducida era lo normal en estos elementos, por lo cual necesitaban comunicarse constantemente con sus sistemas de control centrales para enviar los datos. Incluían una serie de entradas y salidas fijas y utilizaban generalmente lenguajes de programación poco conocidos. Los años setenta ven aparecer una nueva generación de autómatas de la mano de fabricantes de equipos eléctricos como Siemens, Square-D, o Allen-Bradley. Implementaron autómatas capaces de controlar grandes cantidades de entradas y salidas, ideales para industrias tales como la automoción. No se trataba de entornos
-
1-12
Sistemas SCADA 1
amigables, por lo cual estos controles estaban diseñados para soportar las condiciones más severas y, por tanto, eran grandes, pesados y muy caros. Otra de las consecuencias de la evolución de la electrónica fue la reducción de los componentes, lo que permitió realizar una disminución progresiva de tamaño, peso y coste en todos los niveles industriales de control. Resultado de esto fue la introducción de los micro PLC, en los años ochenta. Permitían realizar controles modulares que se adaptaban a las necesidades del momento y venían provistos ahora de sistemas de programación genéricos (ladder o escalera), lo que les deparó un éxito inmediato en todo el ámbito industrial. A medida que los sistemas de control han ido evolucionando, ha aumentado la
complejidad de los elementos que proporcionan la información al usuario.
Fig. 1.9 Sinóptico sistema de bombeo (WinCC, Siemens)
Las necesidades de ver en la distancia y controlar una máquina aparecen en los primeros cuadros de control, donde una multitud de luces indicaba las diferentes situaciones previstas de la máquina. Cualquier situación imprevista, o pasada por alto, podía significar varias horas de trabajo de electricista para llevar la señal olvidada al panel de control y podía ser que no hubiera espacio para colocar el indicador. La aparición de la informática permitió realizar este tipo de control de manera más sencilla. Ahora ya no sería necesario tener a verdaderos expertos en sistemas de automatización cada vez que hiciera falta cambiar el ajuste de un temporizador en un sistema de control. Los grandes cuadros de control empezaban a convertirse en monitores que podían mostrar la misma información, pero cualquier cambio en la presentación era más sencillo de realizar. Bastaban unas modificaciones en el código de la aplicación para que en la pantalla apareciera, por ejemplo, un contador de piezas olvidado en el momento de realizar el diseño del ejemplo anterior.
-
1-13
Sistemas SCADA 1
Vista la necesidad, varios fabricantes desarrollaron entonces paquetes de software capaces de comunicarse con los sistemas de control existentes y permitieron así una flexibilidad de uso no imaginada hasta el momento. Esta tendencia ha ido en aumento, de tal manera que hoy día las opciones existentes son numerosísimas. Algunos de los más conocidos:
Intellution IFIX Omron SCS Siemens WinCC Rockwell Automation RS-View Wonderware InTouch GE-Fanuc Cimplicity
La evolución de los sistemas operativos ha incrementado también las posibilidades de estos sistemas, permitiendo las estructuras multipuesto gracias a los sistemas de red informáticos. Con la irrupción de Internet en el mundo de las comunicaciones industriales ahora es posible conectarse con un sistema de control situado en cualquier lugar del mundo gracias a la tecnología Web-Server: un ordenador dotado de un explorador y la dirección IP del sistema que queremos visualizar serán suficientes. El control a distancia A lo explicado anteriormente se le une, de forma inevitable, la forma en la cual las señales se intercambian entre el sistema a controlar y el sistema que controla. Aparece el concepto de telemetría (tele medida o medida a distancia), entendido como la transmisión a distancia de información sobre algún tipo de magnitud. Un ejemplo de telemetría es el control de llenado de un depósito de agua desde una mina. Unos sensores se ocupan de vigilar el nivel de agua del depósito y el de la mina, informando a la bomba de cuándo debe ponerse en marcha para bombear agua al depósito, si hay nivel insuficiente en éste o cuando debe detenerse, si el depósito está lleno o el nivel de la mina no es suficiente. Desde el centro de control podríamos ver la evolución del nivel de la estación y decidir las acciones pertinentes en caso de problemas (detener el bombeo manualmente, ver si hay elementos defectuosos, etc.) Se puede decir que las primeras comunicaciones serias empezaron con el ferrocarril y el telégrafo. Para organizar el tráfico ferroviario, se avisaba, entre estaciones, las salidas y llegadas de los trenes, pues sólo se tendía una línea. ¿Se ha fijado el lector que en las películas del Oeste, la oficina de telégrafos siempre estaba al lado de la
Fig. 1.10 Ejemplo de tele medida
-
1-14
Sistemas SCADA 1
estación y que lo primero que hacían los malos era cortar los cables del telégrafo, que invariablemente estaban cerca de las vías? La siguiente generación de transmisión de información apareció con el teléfono, que permitió extender las líneas de comunicación a los pueblos y a las ciudades. El aumento de la demanda impulsó la creación de otros métodos de transmisión y entonces apareció la transmisión por medio de ondas de radio o de microondas. La clasificación de los diferentes sistemas de intercambio de información, telemetría y monitorización podría hacerse basándose en el sistema de transmisión: Sistemas de marcación automática Utilizan las líneas telefónicas para transmitir en banda base (rango de voz). Permiten el acceso desde cualquier lugar del mundo donde haya un teléfono y un módem. Los costes de comunicación son reducidos, puesto que las comunicaciones suelen ser puntuales. Por ejemplo, un equipo de monitorización de nivel situado en un depósito de agua de una población bastará con que transmita el valor de nivel cada hora. Sistemas dedicados
Son aquellos que tienen una línea de comunicación permanente con la central. Las comunicaciones se realizan mediante protocolos específicos de comunicación entre máquinas. Permiten la monitorización continua de sistemas remotos y son muy rápidos en la captación de datos y en la emisión de comandos de control y configuración. Sistemas de canales multiplexados La necesidad de transmitir señales de un punto a otro dentro de una instalación se solventa de manera sencilla cuando las distancias son cortas. El problema se multiplica cuando la distancia entre emisores y receptores se incrementa:
- Las tiradas de cable aumentan el coste de instalación y mano de obra. - Aparecen múltiples problemas eléctricos (interferencias, fallos de
conexionado, capacidades parásitas). - En instalaciones existentes es complicado añadir cables nuevos. - Con muchas señales los cables empiezan a necesitar espacio en las
canaletas de distribución.
Fig. 1.11 Multiplexado básico
-
1-15
Sistemas SCADA 1
La técnica que permite enviar varias señales sobre un único canal de comunicación se denomina multiplexado.
Fig. 1.12 Multiplexado aplicado a un bus de campo
Un multiplexor agrupa las señales de entrada en un único mensaje y en el otro extremo de la línea de transmisión estas señales son regeneradas, exactamente igual que si hubieran ido por cables dedicados. Un caso más ilustrativo es un bus de comunicaciones del tipo serie, donde los datos de elementos separados se empaquetan dentro de un único mensaje que se envía a través del canal de comunicación y se desempaquetan en destino.
1.5 Las primeras interfases hombre-máquina La invención del tubo de rayos catódicos, CRT (Cathodic Ray Tube), unida a la del teclado, sustituyó a las máquinas de escribir, teletipos y tarjetas perforadas. Los lenguajes de programación gráfica iniciales se fueron adaptando a las nuevas posibilidades que ofrecía la técnica. Por ejemplo, permitieron cambiar los colores de cada celda de las 2.000 presentes en una pantalla de ordenador, casualmente, 80x25. El siguiente avance significativo vino con el sistema operativo Windows 3.11 en los años ochenta. En esa época los principales desarrolladores de sistemas de interfase gráfica eran Cimplicity e Intellution: • Cimplicity fue un encargo original que se hizo para el gobierno estadounidense. Se
basaba en DOS y era muy complicado de utilizar. • Intellution se basaba también en DOS, con los gráficos del programa Dr.Halo,
mucho más sencillos de manejar. ¿Recuerda alguien el programa Scada Mitor, que utilizaba las imágenes con formato del editor de gráficos Dr.Halo?
-
1-16
Sistemas SCADA 1
Desde hacía tiempo una compañía llamada Wonderware utilizaba Windows para trabajar con un paquete de visualización llamado InTouch, cuya primera versión apareció en 1989. Todo apuntaba a que DOS sería el sistema universal que arrinconaría a Windows y lo haría desaparecer pero parece ser que, a finales de los ochenta, una compañía quesera de California, debido a un error de composición causado por las prisas y la poca claridad de los controles de proceso (sistema basado en DOS, la información se presenta únicamente en forma de líneas escritas, además de verlas hay que leerlas), sacó al mercado un producto defectuoso con consecuencias catastróficas para algunos consumidores. Fue entonces cuando Wonderware pudo demostrar, ante los organismos competentes, en el caso que los procesos supervisados mediante su software eran seguros. Al estar basado en Windows era sencillo de documentar y los procesos se podían representar de manera gráfica, más fácil y segura de interpretar, mucho más que obtener una serie de líneas de texto (DOS). Esta compañía fue la primera en cumplir las exigencias de las agencias estatales estadounidenses. Debemos de tener en cuenta que actualmente los grandes fabricantes de sistemas HMI ofrecen prestaciones similares. Con el auge de Windows también recibió un impulso el desarrollo de utilidades para comunicarse con aplicaciones que funcionaban con este sistema operativo (drivers o controladores). A partir de entonces todos los fabricantes empezaron a tomar a Windows y a DDE como el medio para unir todas las piezas. A mediados de los noventa, aparece una versión de Visual BASIC que permite crear, con gran facilidad, controles gráficos e interfases de usuario gracias a utilidades ya definidas. Colocar un botón en pantalla era simplemente eso, picar y arrastrar el botón, ya confeccionado, hasta el lugar deseado.
1.6 El Sistema Scada Damos el nombre de Scada (Supervisory Control And Data Acquisition o Control con Supervisión y Adquisición de Datos) a cualquier software que permita el acceso a datos remotos de un proceso y permita, utilizando las herramientas de comunicación necesarias en cada caso, el control del mismo. Atendiendo a la definición vemos que no se trata de un sistema de control, sino de una utilidad software de monitorización o supervisión, que realiza la tarea de interfase entre los niveles de control (PLC) y los de gestión a un nivel superior. Los objetivos para que su instalación sea perfectamente aprovechada son los siguientes: - Funcionalidad completa de manejo y visualización en sistema operativo Windows
sobre cualquier PC estándar.
-
1-17
Sistemas SCADA 1
- Arquitectura abierta que permita combinaciones con aplicaciones estándar y de usuario, que permitan a los integradores crear soluciones de mando y supervisión optimizadas (ActiveX para ampliación de prestaciones, OPC para comunicaciones con terceros, OLE-DB para comunicación con bases de datos, lenguaje estándar integrado como VB o C, acceso a funciones y datos mediante API).
- Sencillez de instalación, sin exigencias de hardware elevadas, fáciles de utilizar, y con interfaces amigables con el usuario.
- Permitir la integración con las herramientas ofimáticas y de producción. - Fácilmente configurable y escalable, debe ser capaz de crecer o adaptarse según
las necesidades cambiantes de la empresa. - Ser independiente del sector y la tecnología. - Funciones de mando y supervisión integradas. - Comunicaciones flexibles para poder comunicarse con total facilidad y de forma
transparente al usuario con el equipo de planta y con el resto de la empresa (redes locales y de gestión).
La topología de un sistema Scada (su distribución física) variará adecuándose a las características de cada aplicación. Unos sistemas funcionarán bien en configuraciones de bus, otros en configuraciones de anillo. Unos necesitarán equipos redundantes debido a las características del proceso, etcétera.
1.6.1 Objetivos Los sistemas Scada se conciben principalmente como una herramienta de supervisión y mando. Entre sus objetivos podemos destacar: - Economía: es más fácil ver qué ocurre en la instalación desde la oficina que
enviar a un operario a realizar la tarea. Ciertas revisiones se convertirán en innecesarias.
- Accesibilidad: un parque eólico al
completo (velocidad de cada rotor, producción de electricidad), lo tenemos en un clic de ratón encima de la mesa de trabajo. Será posible modificar los parámetros de funcionamiento de cada aerogenerador, poniendo fuera de servicio los que den indicios de anomalías; consultar el estado de las estaciones transformadoras del parque, detener los molinos que no sean necesarios, etcétera.
- Mantenimiento: la adquisición de datos materializa la posibilidad de obtener datos
de un proceso, almacenarlos y presentarlos de manera inteligible para un usuario no especializado. La misma aplicación se puede programar de manera que nos avise cuando se aproximen las fechas de revisión o cuando una máquina tenga más fallos de los considerados normales.
Fig. 1.13 Parque eólico
-
1-18
Sistemas SCADA 1
- Ergonomía: es la ciencia que procura hacer que la relación entre el usuario y el proceso sea lo menos tirante posible.
- Gestión: todos los datos recopilados pueden ser valorados de múltiples maneras
mediante herramientas estadísticas, gráficas, valores tabulados, etc., que permitan explotar el sistema con el mejor rendimiento posible.
- Flexibilidad: cualquier modificación de alguna de las características del sistema
de visualización no significa un gasto en tiempo y medios, pues no hay modificaciones físicas que requieran la instalación de un cableado o del contador.
- Conectividad: se buscan sistemas abiertos. La documentación de los protocolos
de comunicación actuales permite la interconexión de sistemas de diferentes proveedores y evita la existencia de lagunas informativas que puedan causar fallos en el funcionamiento o en la seguridad.
Todos los sistemas, de mayor o menor complejidad, orientados a lo anteriormente dicho, aparecen bajo uno de los nombres más habituales para definir esta relación: MMI: Man Machine Interface, Interfase hombre-máquina. HMI: Human Machine Interface, Interfase humano-máquina. El sistema a controlar aparece ante el usuario bajo un número más o menos elevado de pantallas con mayor o menor información. Podemos encontrar planos, fotografías, esquemas eléctricos, gráficos de tendencias, etcétera.
1.6.2 Prestaciones El paquete SCADA, en su vertiente de herramienta de interfase hombre-máquina, comprende toda una serie de funciones y utilidades encaminadas a establecer una comunicación lo más clara posible entre el proceso y el operador: Entre las prestaciones de una herramienta de este tipo destacan: La monitorización
Representación de datos en tiempo real a los operadores de planta. Se leen los datos de los autómatas (temperaturas, velocidades, detectores…). Una máquina simple, una instalación hidroeléctrica, un parque eólico, pueden ser vigilados desde muchos kilómetros de distancia. En el dibujo, toda la línea de extrusionado está al alcance de un clic de ratón.
La supervisión
Supervisión, mando y adquisición de datos de un proceso y herramientas de gestión para la toma de decisiones (mantenimiento predictivo, por ejemplo). Tienen además la capacidad de ejecutar programas que puedan supervisar y modificar el control establecido y, bajo ciertas condiciones, anular o modificar tareas asociadas a los autómatas. Evita una continua supervisión humana.
-
1-19
Sistemas SCADA 1
La adquisición de datos de los procesos en observación Un sistema de captación solar se puede observar mediante herramientas registradoras y obtener así un valor medio de la irradiación en la zona, guardando los valores obtenidos y evaluándolos a posterioridad (los parámetros de velocidad y temperatura de cada máquina de la línea se almacenan para su posterior proceso).
La visualización de los estados de las señales del sistema (alarmas y eventos)
Reconocimiento de eventos excepcionales acaecidos en la planta y su inmediata puesta en conocimiento a los operarios para efectuar las acciones correctoras pertinentes. Además, los paneles de alarma pueden exigir alguna acción de reconocimiento por parte del operario, de forma que queden registradas las incidencias. La rotura de una cinta transportadora en una de las máquinas de la línea de extrusionado aparece en forma de aviso en nuestra pantalla, con indicación gráfica de la situación del fallo y con un mensaje sonoro si es necesario.
El mando
Posibilidad de que los operadores puedan cambiar consignas u otros datos claves del proceso directamente desde el ordenador (marcha, paro, modificación de parámetros...). Se escriben datos sobre los elementos de control.
Grabación de acciones o recetas
En algunos procesos se utilizan combinaciones de variables que son siempre las mismas. Un sistema de recetas permite configurar toda una planta de producción ejecutando un solo comando. La línea de vulcanizado en continuo (donde fabrican los perfiles de goma de las ventanas, por ejemplo) se compone de varias máquinas encadenadas con múltiples parámetros (velocidad y temperatura principalmente) que dependen del tipo de perfil a elaborar (la goma más ancha, más estrecha, con forma más o menos compleja, etc.). Con una sola pulsación se pueden poner en marcha todas las máquinas y programar las diferentes zonas de temperatura o velocidad de toda la línea del ejemplo.
Garantizar la seguridad de los datos
Tanto el envío como la recepción de datos deben de estar suficientemente protegidos de influencias no deseadas, intencionadas o no (fallos en la programación, intrusos, situaciones inesperadas, etc.).
Garantizar la seguridad en los accesos Restringiendo zonas de programa comprometidas a usuarios no autorizados, registrando todos los accesos y acciones llevadas a cabo por cualquier operador.
Posibilidad de programación numérica
Permite realizar cálculos aritméticos de elevada resolución sobre la CPU del ordenador (lenguajes de alto nivel, C y Visual Basic, generalmente).
-
1-20
Sistemas SCADA 1
1.6.3 Ventajas Cuando hablamos de un sistema SCADA no hay que olvidar que hay algo más que las pantallas que nos informan de cómo van las cosas en nuestra instalación. Tras éstas se encuentra una multitud de elementos de regulación y control, sistemas de comunicaciones y múltiples utilidades de software que pretenden que el sistema funcione de forma eficiente y segura. Las ventajas más evidentes de los sistemas de control automatizado y supervisado (SCADA) podemos enumerarlas a continuación: - El actual nivel de desarrollo de los paquetes de visualización permite la creación
de aplicaciones funcionales sin necesidad de ser un experto en la materia. - Un sistema PLC está concebido para trabajar en condiciones adversas,
proporcionando robustez y fiabilidad al sistema que controla. - La modularidad de los autómatas permite adaptarlos a las necesidades actuales y
ampliarlos posteriormente si es necesario. - Cualquier tipo de sensores y actuadores puede integrarse en un programa de PLC
mediante las múltiples tarjetas de adquisición disponibles (tensión, corriente, sondas de temperatura, etc.).
- Gracias a las herramientas de diagnóstico se consigue una localización más rápida de errores. Esto permite minimizar los periodos de paro en las instalaciones y repercute en la reducción de costes de mantenimiento.
- Un sistema de control remoto (RTU) puede definirse de manera que pueda funcionar de forma autónoma, aún sin comunicaciones con la estación Maestra.
- El concepto de telemantenimiento permite realizar modificaciones de software en las estaciones remotas (RTU) desde el centro de control.
- Los programas de control pueden documentarse convenientemente de manera que puedan ser fácilmente interpretados por los técnicos de mantenimiento.
- Un conjunto de manuales de usuario y documentación técnica adecuados permitirán el manejo satisfactorio por terceras personas.
- Los sistemas de diagnóstico implementados en los elementos de control informan continuamente de cualquier incidencia en los equipos.
- Los programas de visualización pueden presentar todo tipo de ayuda al usuario, desde la aparición de una alarma hasta la localización de la causa o la parte de esquema eléctrico implicada en la misma. Esto permite reducir los tiempos de localización de averías al proporcionarse información sobre el origen y las causas de los fallos.
- Generación y distribución automática de documentación. El sistema de visualización puede recoger los datos del autómata y presentarlos en formatos fácilmente exportables a otras aplicaciones de uso común, tales como hojas de cálculo.
- Haciendo uso de las tecnologías celulares (GSM, GPRS, UMTS), los sistemas de control pueden mantener informados sobre cualquier incidencia a los operadores responsables de los mismos mediante mensajes de correo electrónico o de voz.
- La integración de sistemas es rápida gracias a los sistemas de comunicación estandarizados.
-
1-21
Sistemas SCADA 1
- La tecnología Web permite el acceso desde cualquier punto geográfico a nuestro sistema de control.
- Los protocolos de seguridad permiten una gestión segura y eficiente de los datos, limitando el acceso a personas no autorizadas.
- Aumento de calidad del producto mediante las herramientas de diagnóstico. El operador es notificado en el momento en que se detecta una incidencia.
- La reducción de personal permite menor número de equipos de mantenimiento, más reducidos y mejor coordinados gracias a la información proveniente de las estaciones remotas, evaluada en el centro de control.
- Posibilidad de mantenimiento por parte de suministradores locales de servicios. - El nivel de descentralización va en aumento, apostando por la modularidad. Esto
permite una mayor disponibilidad, p