






Idiomas
Páginas
Jurídico

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.1
3. Algoritmos para la reducción del ruido y artefactos en el ECG
La reducción del ruido en el ECG ha sido uno de los temas más abordados en la
bibliografía sobre procesado del ECG. Han sido y son muy diversas las maneras de afrontar el
problema y no existe un único método de aplicación universal a todas las fuentes de ruido y
casos.
En el capítulo anterior se han estudiado las principales fuentes de ruido que aparecen en
el registro del ECG y en especial en el caso de la derivación esofágica. Algunas de éstas pueden
minimizarse en la fase de adquisición de la señal prestando un especial cuidado a ciertas
normas o reglas. Sin embargo, algunas de ellas, como el ruido del EMG y los artefactos en la
derivación esofágica, no pueden eliminarse o reducirse al máximo en la fase de adquisición y se
hacen necesarias técnicas de procesado de señal a posteriori para su reducción a un nivel
aceptable.
Una de las primeras opciones es el filtrado de la señal, mediante filtros lineales o no
lineales que maximicen la relación señal a ruido, por ejemplo el filtro de Wiener. Cuando el
espectro de la señal de interés y el ruido se solapan, las técnicas de filtrado dejan de ser
eficaces.
Otra de la técnicas comunes es el promediado de señal. Es la técnica más utilizada en el
procesado de señales biológicas. Su utilización resulta eficaz siempre y cuando la señal y el
ruido a reducir cumplan ciertas condiciones (Ros et al., 1981; Rompelman y Ros, 1986).
El filtrado adaptativo ha sido otra de las técnicas que han obtenido buenos resultados en
la reducción del ruido en el ECG, (Widrow y Glover, 1975; Thakor y Zhu, 1991). Es conocido
desde los años 50, pero su aplicación no ha devenido importante hasta el desarrollo de la
informática y algoritmos de cálculo más rápidos, como el LMS (Widrow y Glover, 1975).

3.2 Detección de micropotenciales auriculares de alta frecuencia
3.1 El promediado de señal
Las primeras aplicaciones del promediado de señal fueron en el campo de la
neurobiología para la detección de respuestas del sistema nervioso de seres vivos ante estímulos
externos. El punto fiducial para el promediado era un destello de luz sobre los ojos que creaba
una respuesta eléctrica evocada en determinados puntos del cuero cabelludo en el area del
córtex visual (Ruchkin, 1965).
La electrocardiografía de alta resolución se centra también en el estudio de ciertas
señales que quedan enmascaradas por el ruido y guardan una relación temporal con otras
fácilmente detectables, onda P y complejo QRS. La recurrencia de estas señales y su
dependencia temporal respecto a un punto fiducial, permiten sumar los diferentes ciclos de la
señal. El método es óptimo si el ruido está incorrelado entre los diferentes ciclos y con la señal
a detectar, es estacionario y aditivo y si las señales a detectar son invariantes en el tiempo y la
diferencia temporal entre la señal y el punto fiducial son constantes (Ros et al., 1981;
Rompelman y Ros, 1986; Ruchkin, 1965). En este caso se puede comprobar fácilmente que el
ruido se reduce en un factor 1/√M, siendo M el número de ciclos de señal promediados,
independientemente de la distribución del ruido presente.
El promediado de M ciclos de señal vendrá dado por la expresión:
x jM
x jmm
M
( ) ( )==
∑1
1
(3. 1)
donde j representa cada una de las muestras de la señal dentro de la ventana de promediado, m
es el número de ciclo cardíaco, xm(j) = s(j) + nm(j), siendo s(j) la señal de interés y nm(j) el
ruido en cada ciclo. Por lo tanto,
x j s jM
n jmm
M
( ) ( ) ( )= +=
∑1
1
(3. 2)
es una estimación de la señal a detectar y la calidad del estimador vendrá determinada por su
sesgo y variancia.
Para el cálculo del sesgo se aplica el operador esperanza,
[ ] [ ]E x j E s jM
E n jmm
M
( ) ( ) ( )= +
=∑1
1
(3. 3)
Suponiendo que el ruido es de media cero
[ ]E x j s j( ) ( )= (3. 4)
por lo que el estimador no tiene sesgo.
La variancia del estimador vendrá dada por la expresión:

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.3
[ ] [ ]Var x j Var s j VarM
n j Cov s jM
n jmm
M
mm
M
( ) ( ) ( ) ( ) ( )= +
−
= =
∑ ∑1 1
1 1
. (3. 5)
Con las hipótesis de estacionariedad del ruido, e incorrelado para todos los ciclos, la variancia
del estimador vale:
[ ] [ ]Var x jM
Var n j( ) ( )= 1. (3. 6)
La variancia del estimador, y por tanto la del ruido se ha reducido en un factor M mientras que
la energía de la señal a detectar, s(j), permance constante.
Este resultado es independiente de la distribución del ruido y depende sólo de la
suposición de ruido incorrelado, estacionario y de media nula.
Sin embargo, el método del promediado de señal implica una serie de restricciones que
no siempre son fáciles de cumplir y que pueden llegar a degradar considerablemente el
resultado final. Entre ellas podemos citar: la detección del punto fiducial, la estacionariedad del
ruido y la señal, y la no independencia del ruido. A continuación pasamos a analizar más en
profundidad alguna de ellas.
3.1.1 Métodos de reducción del jitter
La correcta detección del punto fiducial, que permite alinear los diferentes ciclos de la
señal, es uno de los factores que influyen en el resultado final del promediado. El error
temporal introducido en el instante de sincronismo ha sido estudiado por diversos autores,
(Rompelman y Ros, 1986; Craelius et al., 1986, Ruchkin, 1965). El efecto final del promediado
equivale a un filtrado paso bajo de la señal de interés. La respuesta frecuencial vendrá
determinada por la función característica de la variable aleatoria asociada al error en la
detección del punto fiducial, denominado error de alineamiento.
Para verlo, suponemos que no existe ruido en la señal a promediar. Se puede modelar el
desalineamiento suponiendo que cada uno de los ciclos a promediar no aparecen exactamente
en el instante t = mT, sinó que aparecen un poco desplazados, en t =mT + θm , donde θm es la
variable aleatoria que representa el desalineamiento en el ciclo m-ésimo. entonces se puede
expresar el resultado del promediado como:
x jM
x jM
s jm mm
M
mm
M
( ) ( ) ( ) .= + = += =
∑ ∑1 1
1 1
θ θ (3. 7)
Aplicando la transformada de Fourier a ambos lados y utilizando la propiedad del
desplazamiento se obtiene:
X f S fj f
e( ) ( )= 2π θ(3. 8)

3.4 Detección de micropotenciales auriculares de alta frecuencia
Para obtener la función de transferencia, se calcula la esperanza matemática de X(f)
[ ] [ ] [ ]E X f E S f e S f E ej f j f( ) ( ) ( )= =2 2π θ π θ (3. 9)
El filtro equivalente H(f) valdrá
[ ]H f E e p e dj f j f( ) ( )= =−∞
+∞∫2 2π θ π θθ θ (3. 10)
donde p(θ) es la función de densidad de probabilidad. H(f) será la transformada de Fourier de
p(θ), que se conoce también como función característica.
Por ejemplo, para un error de alineamiento (trigger jitter) con distribución normal con
media 0 y variancia σθ2, la función característica es:
H f ef
( )( )= −2 2π σθ (3. 11)
La frecuencia de corte a -3 dB de este filtro valdrá
f dB− =3
0 1325,
σ θ
(3. 12)
Si la distribución del error es uniforme, entre 0 y c, se obtiene también una expresión
similar para la frecuencia de corte,
fcdB− =3
0 45,(3. 13)
Si se expresa en función de la variancia, al igual que para la distribución normal
f dB− =3
0 130,
σ θ
(3. 14)
Es decir, el resultado es muy parecido en los dos casos, con lo cual podremos afirmar que el
tipo de distribución no influirá de una manera significativa en efecto de filtrado, siendo
únicamente importante la desviación estándar del error.
Por lo tanto, un error grande en el alineamiento provocará una atenuación de las
componentes de alta frecuencia del ECG imposibilitando la detección de micropotenciales. La
utilización de señales muestreadas provocará un término adicional de error en el alineamiento.
La indeterminación en el alineamiento estará acotada por el periodo de muestreo de la señal.
Cuando se promedia, aún en el supuesto de que se utilizase un algoritmo de alineación ideal, se
tiene un error aleatorio con una distribución uniforme entre 0 y Ts. La frecuencia de corte del
filtro equivalente, expresada en función de la frecuencia de muestreo de la señal, valdrá
f fdB s− =3 0 45, (3. 15)
La frecuencia de muestreo deberá ser mayor que la frecuencia de muestreo mínima impuesta
por el criterio de Nyquist para reducir la atenuación de las componentes de alta frecuencia de la
señal. Por ejemplo, para una frecuencia de muestreo de 1000 Hz la frecuencia de corte

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.5
resultante es de 450 Hz con la consiguiente atenuación de parte de la energía de los
micropotenciales de alta frecuencia.
Otro de los términos que afectan al error de alineamiento de la señal y que debe tenerse en
cuenta en el caso de detección de micropotenciales auriculares, cuando se emplea como punto
fiducial el complejo QRS, es la variabilidad del intervalo P-R, afectado por multiples causas. Una
de ellas es que la velocidad de conducción en el nodo auriculo-ventricular varía con el ritmo
cardíaco afectando a la duración del intervalo P-R (Ros et al., 1981). Esta variabilidad del
intervalo P-R se ha puesto de manifiesto en el trabajo de algunos autores en la detección de ALP
(Engel et al., 1988). Por lo tanto, se ha estudiado la variabilidad de dicho intervalo y se han
propuesto algoritmos más robustos al ruido para la detección de la onda P. Una alternativa para
superar dicho problema será la utilización de la derivación esofágica como señal de sincronismo,
dado que por su proximidad a las aurículas la onda P tiene mayor amplitud. Sin embargo, la
movilidad del electrodo esofágico, tal como se ha visto en el capítulo anterior, produce una
inestabilidad en la señal con el consiguiente cambio en la morfología de la señal. Serán necesarios
algoritmos que sean capaces de seguir los cambios en la forma de la señal o bien métodos que
permitan detectar esta inestabilidad.
3.1.1.1 Algoritmos de alineación: formulación
3.1.1.1.a Antecedentes
En la bibliografía hay una gran cantidad de algoritmos para la detección del QRS y la
onda P susceptibles de ser utilizados para la determinación del punto fiducial: detección de pico,
doble nivel, integrales normalizadas, filtro adaptado, correlación cruzada, diferencia cuadrática
media, etc.
Sin embargo, los métodos que ofrecen mejores resultados se basan en la comparación de
la señal a detectar (“alinear”) con un patrón o plantilla (Jané et al., 1991; Berbari et al., 1984). La
forma en que se realiza dicha comparación y la obtención de la plantilla es diversa.
Lo más común es utilizar como punto fiducial el máximo de la correlación entre la señal y
la plantilla. Si el ruido que contamina a la señal es gaussiano y blanco, el método es óptimo. Sin
embargo, en el registro de ECG el ruido no siempre es así y, por ejemplo, si hay interferencias de
50 Hz los resultados pueden ser peores que con otros métodos (Stackee y Peper, 1992, Evanich et
al., 1972). Para solventar este problema y otros similares, que también aparecen en otros campos
del procesado de señal, como radar y sonar, se han desarrollado métodos para la determinación del
retardo entre dos señales contaminadas con ruido no blanco basados en la correlación cruzada. Se

3.6 Detección de micropotenciales auriculares de alta frecuencia
conoce como correlación cruzada generalizada (Knapp y Carter, 1976; Harris et al., 1994). La
expresión se deriva directamente de la correlación cruzada. Si suponemos que las dos señales que
queremos alinear, x(t) e y(t), han sido filtradas previamente al cálculo de la correlación cruzada
con los filtros Hx(f) y Hy(f), el espectro cruzado, que está relacionado con la correlación mediante
la transformada de Fourier, vendrá dado por:
xy(g)
x y*
xyG (f) = H (f)H (f)G (f)~ (3. 16)
y la correlación cruzada generalizada se obtendrá a partir de su transformada inversa
[ ]xy-1
g xyR ( ) = F (f)G (f)~ τ Ψ (3. 17)
donde Ψg(f)=Hx(f)Hy*(f) representa el filtro de correlación. Las funciones del filtro son dos. Por un
lado permite acentuar la señal a correlar en aquellas frecuencias donde la relación señal a ruido es
mayor; Ψg(f) dependerá entonces del espectro de la señal y el ruido. Por otro lado, el filtro permite
obtener un pico lo más acentuado posible en el instante correcto para tener buena resolución
temporal. Sin embargo, los máximos acentuados son más sensibles a los errores introducidos por
los tiempos de observación finitos, particularmente en caso de relaciones señal a ruido bajas. La
elección del filtro será pues un compromiso entre resolución temporal y estabilidad. La forma en
que se lleva a cabo este cálculo ha sido estudiada por diversos autores teniendo en cuenta los dos
criterios, resolución temporal y error debido al ruido. Puede verse a continuación la expresión del
filtro Ψg(f) para cinco casos diferentes (Knapp y Carter, 1976):
[ ]
[ ]
1
1
1
1
1
1 1 2 2
12
2
12
2
G f
G f G f
G f
G f G f G f
f
G f f
xy
xx yy
xy
ss n n n n
xy
( )
( ) ( )
( )
( ) ( ) ( )
( )
( ) ( )
γ
γ−
(3. 18)
En la práctica, el cálculo se realizará con señales discretas transformándolas al dominio
frecuencial mediante la FFT para obtener una aproximación de Ψg(f) y mediante la tranformada
inversa obtener la función de correlación cruzada generalizada. En el caso del ECG una de las
señales que se ha representado como x(t) e y(t) en las expresiones anteriores será la plantilla. La
elección de esta plantilla será otro de los puntos importantes. Para el promediado de la actividad
ventricular suele elegirse como plantilla el complejo QRS promedio de unos cuantos latidos
adquiridos previamente. En algunos, casos para reducir el tiempo de cálculo se elige como
plantilla únicamente una de las dos pendientes del complejo QRS. Para el promediado de la onda

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.7
P la plantilla elegida suele ser una onda completa dada la baja amplitud de la señal y sus
pendientes poco abruptas. Cuando trabajemos con la señal esofágica para la detección de
micropotenciales auriculares la plantilla para alinear las diferentes ondas P no podrá ser fija para
todo el registro si tenemos la certeza de que no es estacionaria. Tal como se ha comentado
anteriormente, la variabilidad de la señal debida al movimiento del electrodo provocaría un error
de alineamiento grande cuando cambiase la morfología de la onda. Hay que recordar que el
método de la plantilla es sensible a la morforfología de la señal.
Como alternativa a los métodos basados en la correlación de la señal con una plantilla
pueden plantearse métodos basados en el dominio frecuencial para la detección del punto fiducial.
Si se utiliza la FFT para el cálculo, la complejidad de los cálculos se ve reducida. Estos no han
proliferado tanto en el promediado del ECG como los basados en la correlación. Sin embargo, se
han publicado algunos que utilizan la fase para obtener errores de alineamiento inferiores al
periodo de muestreo. El error mínimo que se puede conseguir con los métodos temporales está
limitado a la duración del periodo de muestreo.
El primero de los métodos se basa en la fase de la densidad espectral cruzada entre la
señal a alinear y la plantilla. Si la plantilla y la señal son iguales salvo un factor de atenuación, el
espectro cruzado que se obtiene vale:
xy ssj2 fG (f) = G (f)e oα π τ (3. 19)
Gss(f) es real y la fase, θ(f)=2πfτo, es lineal y permite una estimación directa del retardo para cada
frecuencia:
o(f) =(f)
2 f�
�
τθ
π(3. 20)
De forma alternativa, a partir de la derivada de la fase se puede calcular, el retardo de grupo.
Sin embargo, cuando la señal está contaminada por ruido o bien hay ligeros cambios en la
forma de la señal de un latido al siguiente, la fase se ve afectada en gran medida a aquellas
frecuencias donde la energía de la señal es menor y predomina el ruido, imprimiéndole un
comportamiento casi aleatorio. Por lo tanto, los resultados que se obtienen con este método son
mucho peores que los obtenidos con la correlación. Una posible solución a este
comportamiento anómalo de la fase sería ponderar aquellas frecuencias donde la señal tiene
mayor energía que el ruido. La función de coherencia espectral cumple este cometido.
En lugar de utilizar la función de coherencia espectral puede pensarse en utilizar el
espectro cruzado y la dependencia que existe con la función de correlación. Al determinar el
máximo de la función de correlación cruzada se obtiene una expresión que relaciona el espectro
cruzado con el retardo (Bendat y Piersol, 1986):

3.8 Detección de micropotenciales auriculares de alta frecuencia
o0
xy xy
0
2xy
=
(2 f)|G (f)| (f)df
(2 f ) | G (f)| df
τπ θ
π
∞
∞
∫
∫
� �
�
(3. 21)
Al trabajar con señales discretas, las integrales se sustituyen por sumatorios y la frecuencia
máxima es la mitad de la frecuencia de muestreo.
Otro método propuesto por McGill y Dorfman (1984) permite alinear latidos con
resoluciones inferiores al periodo de muestreo. En este caso se parte de la comparación de la señal
con la plantilla mediante el valor medio de la diferencia al cuadrado entre señal y plantilla:
( )φ φ2
n=1
n=N2
e = x(n + ) - p(n)∑ . (3. 22)
Aplicando el teorema de Parseval al sumatorio se obtiene una expresión equivalente en el dominio
frecuencial
φπ φ2 2
k=1
N/2-12j2 k /Ne =
1
NX(0) - P(0) +
2
NX(k)e P(k)∑ − . (3. 23)
La propiedad más importante de esta expresión es que eφ2 es una función de la variable continua φ,
que está relacionada con el retardo. Ello implica que no existe limitación en la resolución
temporal. Para realizar la búsqueda del mínimo se pueden utilizar algoritmos iterativos basados en
el gradiente como el de Newton-Raphson.
El último método considerado basa también la detección del punto fiducial a partir de la
fase, al igual que el espectro cruzado. En este caso se determina el espectro a partir de estimadores
paramétricos, como los modelos autorregresivos multicanal, AR, que relacionan la señal a alinear,
contaminada con ruido, con la plantilla. Considerando la señal a alinear y la plantilla como dos
vectores, V(n)=[x(n) p(n)]T, el modelo AR de V(n) vale:
V n A P V n k n Pk=1
P
k f( ) ( ) ( ) ( / )= − +∑ ε (3. 24)
Ak(P) son las matrices con los parámetros de autorregresión de dimensión P y εf(n/P) es el error de
la estimación. La matriz de densidad espectral multicanal vendrá dada por:
[ ]G f T A f R A fVV s f( ) ( ) ( )*
= − −1 1 (3. 25)
donde Rf es la matriz de autocorrelación del error de estimación y
A f I A P ek=1
P
kj fkTs−
−
= +
∑1 2
1
( ) ( ) π (3. 26)
Ts es el periodo de muestreo. Los elementos de la diagonal de GVV(f) son las densidades
espectrales de x(n) y p(n). Los términos fuera de la diagonal son la estimación del espectro

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.9
cruzado. El retardo puede calcularse a partir de una regresión lineal de la fase del espectro cruzado
así estimado.
3.1.1.1.b Métodos
Se han comparado los diferentes métodos propuestos, algunos de los cuales, como los
métodos AR y la fase del espectro cruzado, no habían sido aplicados hasta el momento a la
electrocardiografía de alta resolución. Los algoritmos probados han sido seis: la fase del espectro
cruzado estimado mediante la FFT entre la señal y la plantilla, correlación cruzada con la plantilla,
diferencia cuadrática media entre espectros, máximo de la señal, retardo calculado a partir del
espectro cruzado ponderado (Bendat) y fase del modelo AR ajustado a la señal y la plantilla.
Para determinar la validez de los diferentes algoritmos se han realizado dos pruebas. En la
primera de ellas se ha sintetizado un registro con 100 latidos generados a partir de un latido patrón
obtenido de un registro real, del cual se ha eliminado el ruido mediante el promediado de más de
100 ciclos. El registro era contaminado posteriormente con ruido blanco gaussiano con diferentes
niveles de relación señal a ruido y se modulaba el registro con una señal de 0,2 Hz para simular el
efecto de la respiración sobre el ECG.
En los algoritmos que tenían en cuenta el espectro de las señales, fase FFT, Bendat y AR,
se han considerado diferentes bandas de señal para intentar determinar el ancho de banda de señal
óptimo que reduce el error de alineamiento al mínimo. Así se han probado las bandas que van
desde 0 Hz a 10 Hz, 25 Hz, 50 Hz y 100 Hz.
La segunda prueba se ha realizado únicamente con aquellos algoritmos que han dado
resultados satisfactorios en la primera. En este caso la señal que se utilizaba para evaluar los
algoritmos eran registros reales. Se han utilizado registros de ECG superficial con la derivación
estándar II, donde la onda P suele tener mayor amplitud, y registros esofágicos bipolares y
unipolares. La plantilla se obtuvo a partir del propio registro promediando un número determinado
de latidos para reducir el ruido en la plantilla hasta un nivel aceptable, <1 µVef. Previamente al
cálculo del punto fiducial se alinearon los diferentes ciclos mediante un algoritmo basado en la
amplitud de la señal filtrada.
En este caso la evaluación del error de alineamiento ya no es tan simple como en el
primero. No se dispone de una referencia temporal de la actividad cardíaca a detectar. Por tanto,
se deberá establecer un criterio cualitativo y a ser posible cuantitativo que permita al menos
comparar los diferentes algoritmos. En la bibliografía se han propuesto algunos. Jané et al. (1991)
proponen utilizar la variancia del error temporal entre el resultado del algoritmo a estudiar y un
detector del QRS común en todos los casos y que está basado en la pendiente, amplitud y duración

3.10 Detección de micropotenciales auriculares de alta frecuencia
de la señal. Se obtiene así una variable aleatoria, t =ta - tw, donde ta es el resultado del algoritmo y
tw el del detector de QRS. Sólo se conoce la diferencia temporal, t, entre estos dos tiempos. Para
poder evaluar los algoritmos se suponen ambas variables, ta y tw, incorreladas. La variancia de t
queda como:
τσ σ σ2ta2
tw2= + (3. 27)
Las prestaciones del algoritmo a estudiar pueden ser evaluadas directamente a partir de σt dado
que σtw es la misma en todos los casos.
Se ha considerado este método como una posibilidad para evaluar el jitter en señales
reales, pero hay que destacar que si ambas variables aleatorias, ta y tw, no están totalmente
incorreladas, como puede ocurrir en algunos casos, el resultado puede llevar a conclusiones
erróneas. Un método similar ha sido propuesto por Craelius et al. (1986). En este caso estiman el
jitter a partir de la degradación en el tiempo de subida de una señal en forma de escalón
sincronizada con una pendiente de QRS.
Otro método propuesto por Shaw y Savard (1995) permite estimar el error de
alineamiento a partir de la propia señal. Para ello suponen un modelo de señal en el que la señal de
interés s(t) tiene un error de alineamiento ∆tm y está contaminada por ruido estacionario nm(t).
x t s t t n tm m m( ) ( ) ( )= + +∆ (3. 28)
Suponiendo que ∆tm es pequeño y que además está incorrelada con nm(t) la variancia de la señal
x(t) puede aproximarse como
{ }σ σ σx m t nt E x t x tds t
dt2 2 2
22( ) ( ) ( )
( )= − ≈ + (3. 29)
Al trabajar con señales muestreadas se pueden obtener estimaciones de x(t) y σx2(t)
x jM
x jmm
M
( ) ( )==
∑1
1
(3. 30)
( )σ x mm
M
jM
x j x j2 2
1
1( ) ( ) ( )= −
=∑ (3. 31)
También puede obtenerse una estimación de la pendiente a partir de la media:
[ ]m jT
x j x j x j x j22
2 21
21 1( ) ( ) ( ) ( ) ( )= + − + − − (3. 32)
Una vez estimadas la pendiente de la señal y la variancia total se puede determinar la variancia
del error de alineamiento, σt2(t), como:
σ σt
xjm j
22
2( )( )
≈ (3. 33)

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.11
En las figuras 3.1 y 3.2 puede verse representada la variancia de la señal en función de la
derivada de la señal promediada para la onda P y el complejo QRS de un ECG simulado de 1 mV
de amplitud, al que se ha añadido ruido blanco gaussiano de valor eficaz 50 µV y 5 µV
respectivamente. El error de alineamiento se ha simulado con distribución gaussiana y desviación
estándar de 1 ms. La pendiente de la recta ajustada por mínimos cuadrados debería coincidir con
el jitter. En el primer caso, figura 3.1, el nivel de ruido es excesivo para la onda P y aparece un
valor negativo de pendiente que no tiene sentido físico. Con el complejo QRS el método funciona
mejor y se obtienen aproximaciones con errores inferiores al 10% para 50 µV y 2% para 5 µV.
Con la onda P, cuando el nivel de ruido es de 5 µV el error en la estimación del jitter alcanza el
-30%.
0 0 .0 1 0 .0 2 0 .0 30
0 .0 0 5
0 .0 1
0 .0 1 5
0 .0 2
0 .0 2 5
0 .0 3
(V /s )^2
mV
^2
0 0 .5 1 1 .5
x 1 0-3
1 .5
2
2 .5
3
3 .5x 1 0
-3
(V /s )^2
mV
^2
(a) (b)
Figura 3. 1 Variancia de la señal en función de la derivada de la señal promediada, onda P (a) ycomplejo QRS (b) con un nivel de ruido de 50 µVef.
0 2 4 6 8
x 1 0-5
1
2
3
4
5
6
7
8x 1 0
-5
(V /s )^2
mV
^2
0 0 .0 1 0 .0 2 0 .0 30
0 .0 0 5
0 .0 1
0 .0 1 5
0 .0 2
0 .0 2 5
(V /s )^2
mV
^2
(a) (b)
Figura 3. 2 Variancia de la señal en función de la derivada de la señal promediada, onda P (a) ycomplejo QRS (b) con un nivel de ruido de 5 µVef.

3.12 Detección de micropotenciales auriculares de alta frecuencia
Sin embargo, este método también presenta algunos inconvenientes según hemos podido
constatar. El más importante es la variación de la señal latido a latido, que provoca que la
estimación de la variancia de la señal aumente. Especialmente en el caso del ECG esofágico, esta
variabilidad puede llegar a producir errores de estimación considerablemente grandes. Otro
problema que surge es debido al ruido presente en la señal que al promediar no se elimina por
completo y que influye en la estimación de la derivada. Además, tal como se ha visto en el
apartado anterior, el error de alineamiento provoca en el promediado un efecto de filtrado paso
bajo con lo que llevará a una subestimación de la derivada de la señal, sesgo, y la consiguiente
sobrestimación del jitter tal como puede verse en la figura 3.3.
Figura 3. 3 Valor medio del jitter estimado a partir de la variancia de la señal y el ruido (5 µVef) y laderivada. La línea continua representa el intervalo de tolerancia para el 95% de las muestras.
Proponemos aquí un nuevo método totalmente diferente a los anteriores para poder
comparar diferentes algoritmos en grupos de dos. Basándonos en el efecto de filtrado paso bajo
que tiene el jitter sobre las componentes de alta frecuencia de la señal al promediar, cabe pensar
que al promediar los sucesivos latidos con dos algoritmos diferentes, aquel que presente menor
error de alineamiento de la señal promediada tendrá mayor energía a alta frecuencia.
Para la comparación de espectros se ha calculado la FFT de cada una de las señales
promediadas, enventanándolas previamente para reducir la variancia del estimador espectral, que
podría introducir artefactos en el espectro, y reducir la dispersión espectral provocada por los
lóbulos secundarios de la ventana (Marple, 1987).La comparación se realiza mediante el cociente
de espectros obteniéndose una función de transferencia. Si la señal que tiene mayor jitter la
ponemos en el denominador se obtiene un respuesta similar a un filtro paso bajo. La
determinación de la frecuencia de corte de esta respuesta permite evaluar de una forma
cuantitativa la diferencia de errores entre ambos algoritmos de alineación. En la figura 3.4 puede
0 2 4 6 8 100
2
4
6
8
10
12
14
16
jitter real, ms(rms)
jitte
r est
imad
o, m
s(rm
s)

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.13
verse el resultado de la simulación para el complejo QRS y diferentes valores de jitter. Se observa
cómo en este caso no existe sesgo en la estimación.
Figura 3. 4 Valor medio del jitter estimado a partir del espectro de la señal promediada con y sin jitterjunto al intervalo de tolerancia para el 95% de las muestras. El nivel de ruido era de 5 µVef.
3.1.1.2 Comparación de los algoritmos de alineación
El resultado de la simulación, para comparar los diferentes algoritmos, se muestra en las
tablas 3.1 y 3.2 para el QRS y onda P respectivamente, en una derivación superficial. Puede verse
cómo en los algoritmos que utilizan la información espectral de la señal el error de alineamiento
depende del ancho de banda considerado obteniéndose una frecuencia óptima. Así, por ejemplo, el
basado en la fase del espectro cruzado y el de Bendat, el ancho de banda de 25 Hz es el que
mejores resultados ofrece para el QRS. En el caso de la onda P el ancho de banda es 10 Hz al
tener menor energía a alta frecuencia. Para el algoritmo basado en el modelo AR el ancho de
banda óptimo es de 50 Hz.
0 2 4 6 8 100
2
4
6
8
10
12
14
16
jitter real, ms(rms)
jitte
r est
imad
o, m
s(rm
s)

3.14 Detección de micropotenciales auriculares de alta frecuencia
Los resultados obtenidos en todos los casos para la onda P son peores que para el QRS
para un mismo nivel de ruido. La explicación está en el menor contenido de energía y ancho de
banda de la actividad auricular.
Tabla 3. 1 Desviación estándar del jitter (ms) para diferentes algoritmos de alineación del complejoQRS.
Ruido (mV ef) Fase Gxy(f) Fase Gxy(f) Fase Gxy(f) Fase Gxy(f) Sx(f)-Sy(f) Rxy(t) CCG
100 Hz 50 Hz 25 Hz 10 Hz
0 0,00 0,00 0,00 0,00 0,00 0,00 0,00
0,001 0,00 0,00 0,00 0,00 0,00 0,00 0,00
0,005 0,15 0,00 0,00 0,00 0,00 0,00 0,00
0,01 0,44 0,00 0,00 0,00 0,00 0,00 0,00
0,02 1,27 0,25 0,00 0,00 0,00 0,00 0,00
0,05 2,69 0,74 0,00 0,28 0,00 0,00 0,15
0,1 3,18 1,20 0,38 0,54 0,38 0,38 0,40
0,2 3,81 2,14 0,71 0,99 0,66 0,65 0,74
0,5 3,76 3,61 1,57 2,20 1,47 1,54 1,70
Ruido (mV ef) Max(x(t)) AR AR AR Bendat Bendat Bendat Bendat
100 Hz 50 Hz 25 Hz 100 Hz 50 Hz 25 Hz 10 Hz
0 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00
0,001 0,23 1,30 0,68 0,81 0,00 0,00 0,00 0,00
0,005 0,87 1,37 0,45 0,87 0,00 0,00 0,00 0,00
0,01 1,00 1,19 0,83 0,98 0,00 0,00 0,00 0,00
0,02 1,47 1,44 0,56 1,18 0,19 0,09 0,00 0,00
0,05 2,13 1,39 0,45 0,60 0,44 0,39 0,38 0,19
0,1 2,98 1,16 0,69 0,54 0,48 0,47 0,48 0,57
0,2 3,68 1,22 0,85 0,73 0,70 0,66 0,74 1,03
0,5 6,01 1,97 1,54 1,51 1,77 1,72 1,82 2,40
Tabla 3. 2 Desviación estándar del jitter (ms) para diferentes algoritmos de alineación de la onda P
Ruido (mV ef) Fase Gxy(f) Fase Gxy(f) Fase Gxy(f) Fase Gxy(f) Sx(f)-Sy(f) Rxy(t) CCG
100 Hz 50 Hz 25 Hz 10 Hz
0 0,00 0,00 0,00 0,00 0,00 0,00 0,00
0,001 0,76 0,26 0,04 0,00 0,00 0,00 0,00
0,005 1,87 0,95 0,45 0,25 0,13 0,26 0,26
0,01 2,00 1,38 0,83 0,44 0,31 0,43 0,38
0,02 1,97 1,63 1,29 0,74 0,59 0,82 0,78
0,05 1,95 1,91 1,86 1,44 1,31 2,03 1,93
Ruido (mV ef) Max(x(t)) AR AR AR Bendat Bendat Bendat Bendat
100 Hz 50 Hz 25 Hz 100 Hz 50 Hz 25 Hz 10 Hz
0 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00
0,001 0,55 0,49 0,36 0,41 0,04 0,14 0,12 0,00
0,005 1,27 0,75 0,46 0,35 0,24 0,25 0,26 0,26
0,01 1,95 0,77 0,51 0,42 0,40 0,38 0,43 0,49
0,02 3,23 0,88 0,74 0,64 0,81 0,72 0,81 0,93
0,05 9,43 1,31 1,25 1,25 1,97 1,88 1,95 2,26
Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.15
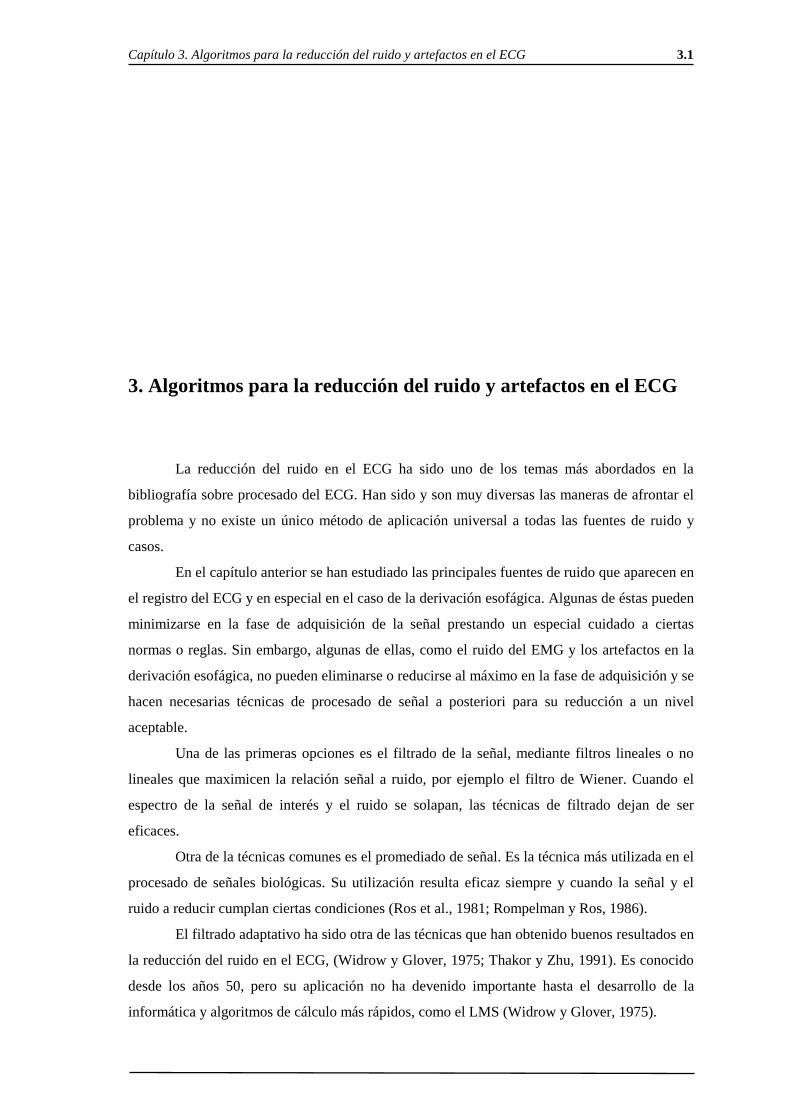
Todos los algoritmos probados se basan en la comparación de la señal a detectar con una
plantilla. Esta comparación se lleva a cabo de diferentes maneras tal como se ha visto. La
correlación sigue siendo uno de los métodos que tiene mejor comportamiento con el ruido. En el
caso de la onda P superficial la aplicación de un filtro de preénfasis, previo al cálculo de la
correlación, permite obtener mejores resultados tal como se aprecia en la figura 3.5.
Todos los métodos probados tienen un comportamiento umbral con el nivel de ruido.
Cuando se supera un determinado valor de ruido el error de alineamiento crece de forma rápida.
0
2
4
6
8
10
0,001 0,01 0,1 1
ruido (mVef)
Jitte
r (m
s)
Rxy(t)
CCG
Figura 3. 5 Resultado de la simulación del algoritmo de alineación basado en la correlación con laplantilla (Rxy(t)) y aplicando filtro de preénfasis previo, correlación cruzada generalizada CCG.
0
1
2
3
4
5
6
7
8
9
10
0,001 0,01 0,1 1
ruido (mVef)
Jitte
r (m
s)
AR 100 Hz
AR 50 Hz
AR 25 Hz
Figura 3. 6 Evolución del jitter para diferentes niveles de ruido y anchos de banda en el algoritmo dealineación basado en un modelo AR de la señal para la onda P.

3.16 Detección de micropotenciales auriculares de alta frecuencia
Sin embargo, se ha observado que en el método basado en el ajuste de un modelo AR a la señal, el
error de alineamiento es superior a los otros métodos, pero no aumenta tan rápidamente al crecer
el ruido sino que permanece más o menos constante. La justificación la podemos hallar en la
propia naturaleza de los métodos autorregresivos que son menos sensibles al ruido cuando se trata
de estimar el contenido espectral de una señal determinista.
Únicamente se han probado sobre las señales reales los algoritmos de detección de la
onda P basados en la plantilla y el basado en la fase del espectro cruzado, Bendat. Los algoritmos
se probaron sobre diferentes derivaciones superficiales (Std. I y Std. II) y esofágicas (bipolar y
unipolar). La adquisición simultánea de una derivación superficial y esofágica permitió contrastar
los resultados de los diferentes algoritmos. Tal como se ha visto en el capítulo 2, la movilidad del
electrodo esofágico en algunos registros y en especial en el caso de derivaciones bipolares, no sólo
afecta al ruido de la señal sino que además provoca cambios en la morfología de la señal. Estos
cambios pueden ser rápidos, de un latido al siguiente, o bien variaciones lentas provocadas por los
movimientos peristálticos del esófago que tienden a desplazar el electrodo.
En la figura 3.7 aparecen los 5 latidos de un registro esofágico bipolar alineados a partir
de la onda P superficial. Puede verse cómo la morfología de las ondas cambia a lo largo del
registro pasando de ser bifásicas a monofásicas. Desarrollar algoritmos de alineación para este
tipo de señales se hace harto complicado. Se probaron algoritmos basados en una plantilla
adaptativa que se actualizaba para cada latido, incluyendo la información de latidos anteriores.
Los cambios rápidos en la señal, de un latido al siguiente en algunos casos, no permiten poder
actualizar de una forma gradual la plantilla. Además, no resulta conveniente promediar esos
latidos por la pérdida de información que conlleva el desplazamiento del electrodo.
Los algoritmos de alineación se probaron con derivaciones esofágicas unipolares que son
menos sensibles a los desplazamientos del electrodo y en algunas bipolares en los casos en los que
se podía determinar que el electrodo no experimentaba grandes desplazamientos, a partir de las
medidas de impedancia eléctrica.

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.17
En la figura 3.8 pueden verse las ondas P de un registro, alineadas según el QRS para una
derivación superficial, estándar I, y una derivación esofágica bipolar. Se puede ver en la
derivación esofágica el jitter introducido por la variabilidad del intervalo P-R. En la figura 3.9
0 20 40 60 80 100 120-0.1
-0.05
0
0.05
0.1
0.15
ms
mV
Onda P superficial, derivación Std. I
0 20 40 60 80 100 120-0.4
-0.2
0
0.2
0.4
ms
mV
Onda P esofágica bipolar
Figura 3. 7 Evolución de la onda P en un registro superficial y esofágico bipolar. Puede apreciarse elcambio en la morfología de la señal esofágica debido a un desplazamiento del electrodo.
0 20 40 60 80 100 120-0.1
-0.05
0
0.05
0.1
0.15
mV
ms
Onda P superficial, derivación Std. I
0 20 40 60 80 100 120-0.1
0
0.1
0.2
mV
ms
Onda P esofágica bipolar
Figura 3. 8 Efecto del jitter al alienar la onda P según el QRS una derivación superficial y esofágica.

3.18 Detección de micropotenciales auriculares de alta frecuencia
aparece el resultado después de alinear con la onda P de la derivación esofágica. En este caso las
ondas aparecen superpuestas y si se estima el jitter a partir de la expresión (3.33) resulta ser de
1,2 msrms para el primer caso y de 0,2 msrms para el segundo, figura 3.10.
0 20 40 60 80 100 120-0.1
-0.05
0
0.05
0.1
0.15
mV
ms
Onda P superficial, derivación Std. I
0 20 40 60 80 100 120-0.1
0
0.1
0.2
mV
ms
Onda P esofágica bipolar
Figura 3. 9 Ondas P superficial y esofágica alineadas mediante el método de la plantilla aplicado a laderivación esofágica.
0 100 200 300 400 500 600 7000
0.1
0 .2
0 .3
0 .4
0 .5
0 .6
0 .7
0 .8
0 .9
1x 10
-3
(mV /s)^2
mV
^2
Figura 3. 10 Variancia de la onda P en función de la derivada de la señal para los dos casos (figuras3.8 y 3.9). Alineando con el complejo QRS (+), alineando con la onda P esofágica (o)
Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.19
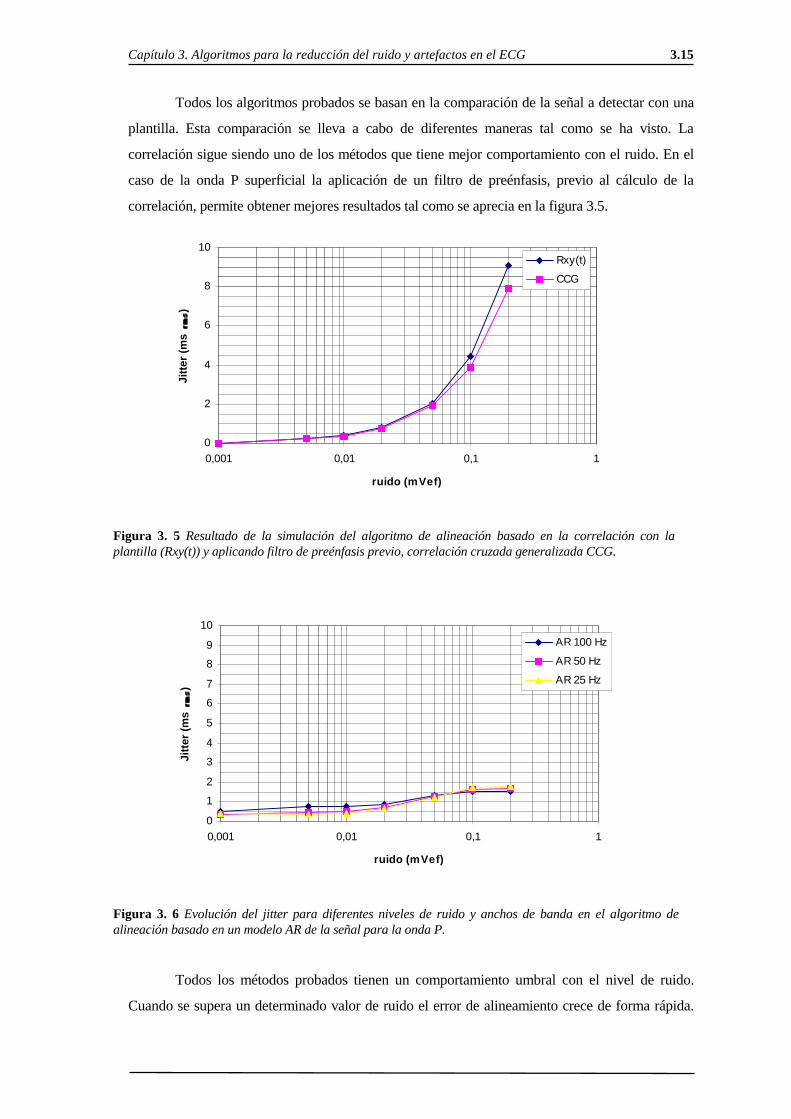
También se ha probado con las señales de las figuras 3.8 y 3.9 el método propuesto para
determinar el jitter sin conocer a priori cuál es el punto fiducial de la señal. En la figura 3.11 se ha
representado el cociente entre el espectro estimado de la señal promediada según el QRS,
mediante la comparación con una plantilla, y la señal alineada según la onda P. Se ve claramente
el efecto de filtrado paso bajo que introduce el jitter en las componentes de alta frecuencia de la
señal. A partir de la frecuencia de corte a -3 dB en la función de transferencia se estima el jitter,
mediante la expresión (3.12), y resulta ser de 1,0 msef que está en consonancia con el obtenido a
partir de (3.33).
0 20 40 60 80 100 120 140 1600.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Hz
frecuencia de
corte a -3dB
130 Hz
Figura 3. 11 Efecto de filtrado paso bajo en la señal promediada al alinear con el QRS.

3.20 Detección de micropotenciales auriculares de alta frecuencia
3.1.2 Métodos de reducción del ruido no estacionario
La expresión (3.6), obtenida anteriormente para la reducción del ruido, tiene validez
únicamente con ruido estacionario. Sin embargo, el ruido presente en el ECG puede no ser
estacionario en ciertas condiciones de medida. Las causas pueden encontrarse en las fuentes del
ruido. El ruido de EMG, según se ha visto, está influido por la respiración y otros factores
fisiológicos. Los artefactos debidos al movimiento, por sus naturaleza esporádica son
claramente no estacionarios. El ruido del electrodo puede no ser estacionario por variaciones
durante el registro de la interfaz paciente-electrodo (Vargas, 1996; Vargas et al., 1993). Todo
ello, hace que la hipótesis de estacionariedad del ruido no sea válida y por lo tanto, la expresión
que permite determinar la reducción de la variancia de ruido no sea válida. La reducción del
ruido que se obtiene en este caso, puede ser mucho menor de lo esperado. Para solventar este
problema se han propuesto en la bibliografía diversos métodos para mejorar la reducción del
ruido no estacionario (Lütkenhöner et al., 1985; Bataillou et al., 1995; Vargas, 1996). El más
utilizado ha sido el promediado ponderado. Cada uno de los ciclos de señal a promediar se
multiplica por un factor de ponderación que depende inversamente de la variancia de ruido en
ese ciclo. El promediado de M ciclos se define como
x jM
w x j wm mm
M
mm
M
( ) ( ) , .= == =
∑ ∑11
1 1
(3. 34)
El valor de los pesos wm que optimiza el promediado vale:
wmm
ii
M=
=∑
1 112
21
σσ
(3. 35)
Si el ruido es estacionario, σ2m = σ2 se obtiene el resultado del promediado clásico, wm = 1/M.
El promediado ponderado requiere conocer la variancia del ruido. Sin embargo, en la
mayoría de los casos ésta no se conoce y debe estimarse. Un buen estimador es el valor
cuadrático medio de la señal en un intervalo de la señal donde no exista actividad eléctrica, por
ejemplo en el intervalo isoeléctrico T-P en el ECG.
en
x j TPm mj
n2 2
1
1
1=
−+
=∑ ( ) (3. 36)
La esperanza matemática de em2 converge al verdadero valor de la variancia del ruido. Sin
embargo, puede desviarse significativamente respecto a σ2m debido a fluctuaciones aleatorias si
la longitud del intervalo es corta y por lo tanto el número de puntos, n, es pequeño (Bendat y
Piersol 1986). En el siguiente apartado, 3.2.3, se expone un estudio más detallado de los
diversos factores que afectan a esta estimación.

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.21
Otro problema derivado de la estimación del ruido en el promediado ponderado es la
sobrestimación del ruido que pueda hacerse debido a la presencia de señal dentro de la ventana
de cálculo. Éste es uno de los principales inconvenientes en el promediado ponderado, puesto
que lleva a una subestimación de la señal promediada. En los casos donde la energía de la señal
no sea un parámetro importante, no es un inconveniente. Sin embargo, en la detección de
micropotenciales la energía de la señal forma parte de uno de los criterios de decisión para su
detección.
Se propone aquí un nuevo método para la reducción del ruido no estacionario que
intenta solventar alguno de los problemas presentados con el promediado convencional y el
promediado ponderado. El método que se propone adopta la idea del promediado ponderado,
pero ahora los pesos valen 1 ó 0, con lo cual se solventan los problemas de subestimación y
sobrestimación de la señal. Además, permite determinar el número mínimo de ciclos de señal a
promediar para conseguir una reducción concreta del ruido y eliminar del promediado los ciclos
de señal que no contribuyan a la reducción de aquel (Ramos y Pallás-Areny, 1995; Ramos y
Pallás-Areny, 1996a).
El primer paso consiste en estimar la variancia del ruido en cada uno de los ciclos. Para
ello se puede utilizar el método propuesto de calcular el valor cuadrático medio de la señal en
un intervalo isoeléctrico.
El siguiente paso es proceder a una ordenación de los ciclos de la señal por orden
creciente de nivel de ruido. Los ciclos con menor nivel de ruido contribuirán menos en el ruido
final de la señal promediada. La ordenación que resulta está relacionada con la función de
distribución inversa de la variancia según:
ord-1Var (N)= F
N
M2σ
(3. 37)
donde N es el número de orden y M el número total de ciclos adquiridos de señal. Así, para el
caso de ruido estacionario la curva resultante sería una constante de valor σ2max, todos los ciclos de
señal tienen la misma variancia. En las figuras 3.12 y 3.13, pueden verse la función de densidad de
probabilidad y las variancias ordenadas para diferentes distribuciones (uniforme, triangular,
exponencial y Rayleigh).

3.22 Detección de micropotenciales auriculares de alta frecuencia
Si volvemos a la expresión (3.5), que determinaba el ruido resultante de la señal
promediada, y suponemos que el ruido está incorrelado, aunque sea no estacionario, y es
independiente de la señal, se obtiene la siguiente relación:
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
o Exponencialx Triangular+ Uniforme- - Rayleigh
Orden de ciclo
Variancia (µV2)
Figura 3. 12 Representación del ruido de 100 ciclos de señal ordenados para diferentes distribucionesde variancia.
0 2 4 6 8 10 120
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45 o Exponencialx Triangular+ Uniforme- - Rayleigh
Variancia (µV2)
Figura 3. 13 Función de densidad de probabilidad para diferentes distribuciones de variancia

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.23
[ ]Var x j VarM
n jM
mm
M
mm
M
( ) ( )=
=
= =∑ ∑1 1
12
2
1
σ (3. 38)
La variancia del ruido de M ciclos de señal promediados no se reduce en un factor 1/M, sino
que dependerá del valor del ruido en cada uno de los ciclos de señal. Reordenando el sumatorio
por orden creciente de variancias se obtiene una expresión que determina el nivel de ruido de
los N primeros ciclos promediados.
La mejora que se obtiene en la reducción del ruido, cuando éste es no estacionario,
dependerá de la distribución de variancias de los diferentes ciclos. La distribución de la
variancia dependerá del origen del ruido y las causas que provocan que no sea estacionario
(EMG de la respiración, artefactos de movimiento, electrodos etc. ). Dada la diversidad de
posibles distribuciones que pueden darse en casos reales, se ha optado por analizar la expresión
(3.38) para cinco distribuciones diferentes, uniforme, exponencial, triangular, Rayleigh y
potencial, que podrían ser representativas de la mayoría de casos. En el anexo D puede verse el
desarrollo completo para cada distribución.
Distribución uniforme de variancias
La primera distribución que se ha analizado es la uniforme por su sencillez. La
variancia puede tomar cualquiera de los valores comprendidos entre σ2max y σ2
min con igual
probabilidad. Para M ciclos de señal, siempre que M sea suficientemente grande, para tener un
número representativo de diferentes valores (por ejemplo mayor que 100), la ordenación de las
variancias obedece a la expresión
( )ord-1
min max minVar (N)= FN
M
N
M2σ σ σ σ
= + −2 2 2 . (3. 39)
Si se sustituye (3.39) en (3.38) y se resuelve el sumatorio, la variancia de la media de los N
primeros ciclos promediados vale
[ ] ( )Var x j
NVar m
N M
N
Nord
m
Nmin max min
( ) ( ) .= = +− −
=∑1 1
221
2 2 2σ σ σ(3. 40)
En este caso el valor mínimo de la variancia se obtiene cuando se promedia todos los ciclos de
señal independientemente de la dispersión de variancias.

3.24 Detección de micropotenciales auriculares de alta frecuencia
Distribución exponencial de variancias
La función de orden vale:
ord min tVar (N)= LnN
Mσ σ2 2 1− −
. (3. 41)
Los valores posibles de la variancia pueden estar comprendidos entre σ2min e infinito. El
parámetro σ2t controla la dispersión de variancias. Cuanto más pequeño, más probable es tener
valores próximos al mínimo. En el límite, cuando σ2t = 0, el ruido es estacionario.
La variancia de la media de los N primeros ciclos no puede calcularse a partir de una
expresión cerrada como en el caso de la distribución uniforme. Para resolver este inconveniente
se ha optado por aproximar el sumatorio a una integral. Para un número de ciclos
suficientemente grande, mayor que 100, el error máximo de la aproximación es inferior al
2,5%.
[ ]Var x jN
Var m dmN
M N LnN
M
Nord
N min tt
( ) ( )
( )
≈ =+
+− −
∫11
2 0
2 22
2
σ σ σ(3. 42)
Derivando la expresión anterior respecto al número de ciclos promediados, N, se
obtiene que el número de ciclos necesarios para obtener el mínimo ruido es menor que el
número total de ciclos, M.
Distribución triangular de variancias
En este caso la variancia del ruido está distribuida entre σ2min y σ2
max y al igual que en la
distribución exponencial el sumatorio se aproxima con una integral
( )ord max max minVar (N)= N Mσ σ σ2 2 21− − −/ . (3. 43)
[ ] ( ) ( )[ ]Var x j
N M M
N N
max min max( )/ /
≈− − −
+2
3
1 12 2 3 2
2
2σ σ σ(3. 44)
En este caso, al igual que el anterior, se puede demostrar que la mínima variancia de
ruido se obtiene para un número de ciclos promediados, Nmin, menor que el número total de
ciclos M. En este caso puede obtenerse una expresión para el número de ciclos en función de la
dispersión de variancias y el número de ciclos adquiridos M.

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.25
N M Mmin
max min max min min
max min
= −+ − −
−
2 3 8 5
2
2 2 2 2 4
2 2
2
σ σ σ σ σ
σ σ(3. 45)
Distribución Rayleigh de variancias
La distribución que se ha utilizado en este caso es una distribución de Rayleigh
desplazada. El valor mínimo de la variancia es diferente de cero, al contrario de lo que ocurre
con una distribución de Rayleigh normal. Sin embargo se ha decidido mantener el nombre por
la similitud de las expresiones.
El parámetro que controla la dispersión de variancias es σ2t. Al igual que ocurre con la
distribución exponencial, a mayor σ2t mayor dispersión de variancias. En el límite cuando σ2
t
valga cero, el ruido será estacionario.
( )ord-1
min tVar (N)= FN
MLn N M2σ σ σ
= + − −2 2 2 1 / . (3. 46)
La variancia de la media, al igual que los casos anteriores, se puede aproximar por una
integral. La resolución analítica de la integral no es posible, pero puede resolverse numéricamente.
Se ha podido comprobar que para determinados valores del parámetro de dispersión, σ2t, se
obtiene un mínimo en la variancia de la media cuando no se promedian todos los ciclos.
Distribución Potencial (Xα) de variancias
La última distribución que se ha analizado es la potencial. Es una distribución que no se
asocia a ningún fenómeno físico, pero que permite obtener distribuciones muy diferentes, que
se aproximan a alguna de las anteriores, variando simplemente el parámetro del exponente, α.
La expresión general para la función de densidad de probabilidad es la siguiente
fdp yy
max min
min
max min
( ) .=−
−
−
−
1 12 2
2
2 2
1
α σ σ
σ
σ σ
α
α
(3. 47)
La variancia de los diferentes ciclos se encuentra distribuida dentro del intervalo
[σ2min , σ2
max].
La función de orden que se obtiene al integrar la función de densidad de probabilidad e
invertirla es:

3.26 Detección de micropotenciales auriculares de alta frecuencia
( )ord min max minVar (N)=N
Mσ σ σ
α2 2 2+ −
. (3. 48)
La simplicidad de la expresión resultante permite analizar fácilmente diferentes casos.
Aproximando el sumatorio con la integral como en los casos anteriores, la variancia del
ruido de la media vale:
[ ]( )
Var x j
N
M
N
min max min
( ) ≈+ −
+
σ σ σ
α
α2 2 2 1
1. (3. 49)
Derivando la expresión (3.49) e igualando a cero se obtienen el valor Nmin para el cual
el ruido es mínimo
N Mminmax
min
=
+−
−
αα
σσ
α1
1
12
2
1
(3. 50)
Analizando (3.50), se observa que para valores de α ≤ 1 no existe un número mínimo
de ciclos a promediar menor de los M disponibles, para obtener el menor ruido posible. Para
exponentes α > 1, que implica distribuciones donde la mayoría de ciclos tienen variancia baja,
se obtiene un número mínimo de ciclos a promediar menor que el total, Nmin<M, siempre que:
σ
σ
α
αmax
min
2
2
2
1>
−(3. 51)
3.1.3 Estimación de la variancia
Hasta ahora se ha supuesto que se conocía el valor real de la variancia en cada uno de
los segmentos de señal para el análisis de la reducción del ruido. Sin embargo, en la aplicación
real del método ésta no será conocida a priori, y deberá estimarse a partir de la señal. Según se
ha dicho, el error del estimador utilizado, que es el valor cuadrático medio de la señal en un
intervalo isoeléctrico, depende del número de muestras utilizado y de la longitud de la ventana.
Este error puede afectar al cálculo del ruido de la señal promediada y al resultado del
promediado. Por lo tanto, se han estudiado dos métodos diferentes de estimar el ruido final de
la señal promediada para poder determinar el número óptimo de ciclos a promediar.
Varios autores han propuesto distintos métodos para estimar la variancia del ruido de la
señal. Por ejemplo, Berbari (1988) propone estimar la variancia a lo largo de las diferentes
realizaciones de la señal, en este caso latidos. Para ello elige un punto dentro del ciclo cardíaco
y calcula su variancia tipo ajustada a lo largo de los diferentes ciclos de señal. No obstante, este
método no ofrece resultados satisfactorios cuando el ruido que contamina a la señal no es

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.27
estacionario, o existen variaciones de baja frecuencia de la línea base a lo largo del registro, que
si no se filtran previamente introducen un término de error en la estimación de la variancia del
ruido.
Por todo ello, tal como se ha comentado, se ha optado por estimar la variancia del ruido
a partir del valor cuadrático medio de la señal en un intervalo de duración finita dentro de cada
ciclo cardíaco. Si la longitud del intervalo es pequeña respecto al ciclo cardíaco, podemos
suponer que las características del ruido permanecen constantes dentro de esa ventana.
Sea x(t) el intervalo de duración finita T del proceso aleatorio y estacionario, {x(t)}, del
cual queremos estimar el valor cuadrático medio y su variancia. Si la señal es de media cero, la
estimación de la variancia vendrá dada por:
� ( )ψ x
T
Tx t dt
2 2
0
1= ∫ (3. 52)
El valor verdadero será
[ ]ψx E x t2 2= ( ) (3. 53)
Aplicando el operador esperanza matemática sobre el estimador, �ψ x
2, se obtiene el
verdadero valor. Por lo tanto, será un estimador sin sesgo. El parámetro que determinará la
calidad del estimador será en este caso su variancia, que viene definida por la expresión:
[ ] ( )[ ] [ ]Var E Ex x x x x� � �ψ ψ ψ ψ ψ2 2 2 2 4 4= − = − (3. 54)
Suponiendo que el ruido es gaussiano, la expresión anterior se puede simplificar y
expresar en función de la función autocovariancia de ruido y la media (Bendat y Piersol, 1986)
[ ] ( )VarT
C C dx xx x xx� ( ) ( )ψ τ µ τ τ2 2 22
2≈ +−∞
∞∫ (3. 55)
A partir de esta expresión se ha analizado la variancia del estimador para tres tipos de
ruido habituales en el registro del electrocardiograma: ruido blanco de media cero, ruido 1/f y
una interferencia senoidal de frecuencia fija. Los dos primeros tipos de ruido pueden modelar el
EMG y ruido de los electrodos y los circuitos electrónicos, mientras que el tercero está
relacionado con las interferencias de la red eléctrica que se acoplan al paciente y al circuito de
medida.
Para el caso de ruido blanco de banda limitada B y media cero la función de
autocovariancia resulta ser:
CB
Bxx x( )
senτ σ
π τ
π τ= 2 2
2(3. 56)
En este caso ψ σx x
2 2= y la variancia del estimador vale

3.28 Detección de micropotenciales auriculares de alta frecuencia
[ ]VarBT
xx
�ψσ2
4
≈ (3. 57)
donde T es la longitud del intervalo de integración y σ2x la variancia de ruido que se quiere
estimar. A partir de este resultado se puede concluir que para reducir el error del estimador el
producto BT deberá ser lo mayor posible y ello implica que la ventana utilizada para el cálculo
del ruido sea lo más larga posible. Existirá, por tanto, un compromiso entre el error aleatorio
del estimador, la variancia, que se reduce al aumentar la longitud de la ventana y el error
sistemático o sesgo que aparece en la estimación si la longitud de la ventana es demasiado
grande e incluye fragmentos de la señal de ECG, sobrestimando el ruido presente en la señal.
Si el ruido estudiado tiene comportamiento 1/f, y se analiza en un margen de
frecuencias (fi , ff ) la variancia del estimador vale
[ ]Var
TLnf
f
f fx
x
f
i
f i
�ψσ2
4
2
1 1≈
−
(3. 58)
Al igual que el ruido blanco si se aumenta la longitud de la ventana, T, se reduce la
variancia en el mismo factor que en el caso anterior. La única diferencia aparece en relación al
ancho de banda del ruido considerado. No sólo depende del ancho de banda (ff -fi), sino que
aparece un término en el denominador que depende de la relación de frecuencias. Si fi y ff están
en proporción muy próximas, la variancia aumenta en un factor mayor al caso de ruido blanco.
Sin embargo, este problema no se planteará en el caso electrocardiografía donde se trabaja con
anchos de banda relativos grandes, fi∼10 Hz y ff∼300 Hz .
El tercer de tipo de ruido considerado, una interferencia senoidal, requiere un análisis
diferente al tratarse de una señal determinista. En este caso hay que volver a la expresión inicial
del valor cuadrático medio y suponer que x(t) es una señal senoidal de frecuencia ω y amplitud
A, y no está sincronizada con la ventana de análisis. Esto se puede modelar con un fase
aleatoria, φ, con distribución uniforme en [-π,π]. Sustituyendo en (3.52), integrando y
agrupando términos se obtiene la expresión
[ ]� sen( ) sen( ) cos( )ψ ω φω
ω ω φx
T
TA t dt
A A
TT T
2 2
0
2 21
2 22= + = − +∫ . (3. 59)
Puede comprobarse fácilmente que la esperanza matemática del estimador coincide con el valor
cuadrático medio de la señal, A2/2, y tiene una función de densidad de probabilidad
fdpA T
T
Ax
x
( � )sen ( )
( )�
ψ
πω
ωψ
2
4 2
2
22 2
1
2 2
=
− −
(3. 60)
El valor medio del estimador coincide con el valor real aunque no es el valor más probable tal
como puede verse en la figura 3.14. Si se calcula la variancia de este estimador se obtiene

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.29
[ ]Var AT
Tx
�
senψ
ω
ω2 41
8=
(3. 61)
La variancia del estimador depende, al igual que los casos anteriores, de la variancia del
ruido, en este caso el valor eficaz al cuadrado de la señal senoidal, y disminuye al aumentar la
longitud de la ventana. Además, en este caso el error del estimador se anula si se elige una
longitud de ventana, T, adecuada, igual a un número entero de semiciclos de interferencia. Por
ejemplo para el caso de la interferencia de red eléctrica de 50 Hz el tiempo de integración
debería ser T= n·10 ms, siendo n un número entero.
En el caso de trabajar con señales discretas se llega a expresiones equivalentes para los
tres tipos de ruido que dependen de la frecuencia o ancho de banda del ruido el número de
muestras utilizadas y la frecuencia de muestreo.
Como resumen de los resultados anteriores podemos decir que la ventana para la
determinación del ruido presente en la señal deberá ser lo mayor posible, aunque evitando
siempre incluir en la ventana la señal del ECG. Además, cuando exista constancia de la
presencia de interferencias de la red eléctrica, la longitud deberá ser un número entero de
semiciclos de red. Por ello, el intervalo isoeléctrico T-P se ha elegido como ventana para el
cálculo del ruido.
3.1.4 Estimación del ruido de la señal promediada
La determinación del ruido final de la señal promediada es también un parámetro
importante puesto que afecta al número de ciclos de señal que se deben promediar y a los
algoritmos que utilizan este nivel de ruido como referencia para la detección de
0 0.2 0.4 0.6 0.8 10
2
4
6
8
10
12
14
A2/2
fdp x( � )ψ 2
Figura 3. 14 Función de densidad de probabilidad del estimador de la variancia en presencia de unainterferencia senoidal.

3.30 Detección de micropotenciales auriculares de alta frecuencia
micropotenciales. Es por ello que se ha decidido hacer un estudio comparativo de los dos
métodos citados anteriormente.
El primer método para determinar el nivel de ruido de la señal promediada es el más
simple y el utilizado por la mayoría de autores. Consiste en la estimación de la variancia de
ruido en un intervalo de la señal promediada mediante el valor cuadrático medio de la señal. La
variancia y el valor medio de este estimador ya han sido analizados para la estimación del nivel
de ruido latido a latido. En este caso el nivel de ruido es mucho menor y según el teorema del
límite central (Papoulis, 1980) se puede aceptar la hipótesis de normalidad del ruido, puesto
que proviene de la suma de M variables aleatorias independientes, siempre que el número de
ciclos promediados, M, sea suficientemente grande. La media del estimador coincidirá con la
variancia de ruido que se quiere medir y la variancia del estimador dependerá, al igual que en el
caso de cada latido, del nivel de ruido y de la longitud de la ventana que se utilize. Sustituyendo
en la expresión (3.57) el valor de la variancia de la media, expresión (3.38), y suponiendo ruido
blanco se obtiene:
[ ]VarBT BT M
xx
m
m
M
�σσ
σ24
4
2
1
2
1 1≈ =
=
∑ (3. 62)
En este caso, el estimador de la variancia, dado que se trata de señales discretas, seguirá
una ley chi-cuadrado, χ2, con la media y la variancia determinadas anteriormente. Si el número
de puntos de la ventana es suficientemente grande, n > 30, se puede aproximar la distribución
chi-cuadrado por una distribución gaussiana (Bendat y Piersol, 1986).
El intervalo de tolerancia del estimador, con un nivel de tolerancia 1-α, vendrá dado
por la expresión
[ ] [ ]P k Var k Varx x x x x� � � �σ σ σ σ σ α2 2 2 2 2 1− ≤ ≤ +
= − (3. 63)
La constante k dependerá del riesgo α que estemos dispuestos a aceptar. Normalmente
se eligen niveles de tolerancia del 95% ó 99% con k95% = 1,96 y k99% = 2,58. Al aumentar el
nivel de significación aumenta la anchura del intervalo de confianza.
El segundo estimador propuesto (Ramos y Pallás-Areny 1996a) recurre a la expresión
3.38 que relaciona el ruido en cada uno de los ciclos con el ruido final de la señal promediada.
Para determinar el ruido final promediamos el ruido estimado en cada uno de los ciclos. Por lo
tanto, las fluctuaciones aleatorias que puedan incluir cada una de las estimaciones se reducirán.
Si el número de ciclos promediados es suficientemente grande, el estimador seguirá una ley
normal y su variancia, suponiendo cada una de las variables independientes, valdrá
[ ] [ ]VarM
VarBT M
x m
m
M
m
m
M
� �σ σ σ2
4
2
1
4
4
1
1 1 1= ≈
= =∑ ∑ (3. 64)

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.31
El intervalo de tolerancia del segundo estimador vendrá dado por una expresión similar
a la del primer estimador. Sin embargo, ahora la anchura del intervalo es mucho menor al
haberse reducido la variancia del estimador. Por ejemplo para el caso de ruido estacionario,
σm = σ, la variancia del segundo estimador es M veces más pequeña. Si el ruido no es
estacionario también se obtiene una mejora aunque dependerá de la distribución de variancias
en el registro.

3.32 Detección de micropotenciales auriculares de alta frecuencia
3.2 Resultados del promediado de señal en la reducción del ruido
En este apartado se presentan los resultados de la aplicación de las técnicas descritas
anteriormente sobre señales simuladas y señales reales, adquiridas en el laboratorio de
Instrumentación y Bioingeniería del Departamento de Ingeniería Electrónica de la UPC.
La prueba de los métodos descritos para el promediado de señal sobre señales
simuladas permite verificar las hipótesis que se han formulado sobre la reducción del jitter y el
ruido no estacionario. Esta verificación no es posible del todo sobre señales reales puesto que
las características de la propia señal son en la mayoría de las veces desconocidas o difíciles de
determinar.
La verificación experimental del promediado ordenado se ha realizado mediante dos
métodos diferentes al igual que en el caso del jitter. Por un lado se ha optado por la simulación
numérica de las diferentes distribuciones estudiadas. El otro método se ha basado en medidas
reales de ECG, estudiando para más de 100 registros la distribución de variancias del ruido y su
reducción.
3.2.1 Resultados del promediado ordenado con simulación numérica
3.2.1.1 Métodos
Las simulaciones numéricas se realizaron en el entorno de programación Matlab. Las
simulaciones se hicieron para cada una de las distribuciones presentadas en el apartado 3.2.2
con intervalos de variancias similares en todos los casos [σ2min , σ2
max]. El número de ciclos de
señal promediada en cada caso fue de 100 para no alargar de forma considerable el tiempo de
cálculo y por considerarse suficiente para la aproximación del sumatorio a la integral.
Para validar la eficacia del método se utilizaron segmentos de ruido de 100, 300, 500 y
1000 muestras (50 ms, 150 ms, 250 ms y 500 ms respectivamente para una frecuencia de
muestro de 2 kHz). Estos valores abarcan la longitud típica de un segmento isoeléctrico T-P en
electrocardiografía y permiten evaluar el efecto de utilizar un número finito de muestras para la
estimación de la variancia del ruido.
La ordenación de los segmentos se hizo de dos maneras. En el primer caso los
segmentos se ordenaron según la variancia del ruido de cada segmento, que es conocida al
generarse este ruido de forma artificial. En el segundo caso, los segmentos fueron ordenados
según la estimación que se hizo de la variancia del ruido en cada uno de los segmentos a partir
del valor cuadrático medio de la señal (ruido).

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.33
También se calculó el ruido de los diferentes ciclos promediados sin ordenar para poder
comparar el promediado ordenado con el método clásico.
3.2.1.2 Resultados
La eficacia del promediado ordenado depende, tal como se ha visto, de la distribución
de variancias en los diferentes ciclos a promediar. En la figura 3.15 puede verse el resultado del
promediado de cien ciclos con los diferentes tipos distribuciones analizadas. Se puede apreciar
en la figura cómo para algunas distribuciones la mínima variancia del ruido se obtiene para un
número de ciclos inferior al disponible.
Otro de los aspectos importantes analizados en el apartado 3.2.4 es el error de los
estimadores de la variancia del ruido de la señal promediada. Para ilustrarlo, en la figura 3.16 se
ha representado la evolución del valor medio de la variancia del ruido para los dos estimadores,
que como puede verse coinciden aproximadamente con el valor teórico. Además, se han
representado también los intervalos de valor máximo y mínimo obtenidos a partir de múltiples
realizaciones. Se puede comprobar, tal como se había analizado, que el segundo estimador tiene
0 10 20 30 40 50 60 70 80 90 1000
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2o uniformex potencial+ triangular+ exponencialx+ Rayleighox constante+o
Numero de ciclo
Var
ianc
ia (u
V)^
2
Figura 3. 15 Variancia del ruido de la señal promediada para diferentes tipos de no estacionariedadrepresentada en función del número de ciclo. Las flechas indican la variancia mínima de ruido. Seaprecia cómo en algunos casos no es necesario promediar todos los ciclos.

3.34 Detección de micropotenciales auriculares de alta frecuencia
un intervalo de tolerancia más estrecho y por tanto menor variancia que el primero. Este
intervalo más estrecho se reflejará en el resultado del promediado a la hora de determinar el
número óptimo de ciclos a considerar. Por lo tanto, un error grande puede llevarnos a elegir un
resultado con mayor nivel de ruido.
En la tabla 3.3 se han representado los errores máximo y medio en valor absoluto,
obtenidos para 100 simulaciones de los dos estimadores con una distribución de variancias
uniforme con una relación σmax2/σmin
2 = 4. Con los otros tipos de distribuciones se obtuvieron
resultados similares. La tabla muestra el efecto que tiene sobre el resultado final el error en la
estimación de la variancia al ordenar los ciclos de señal con diferentes longitudes de ventana,
100, 300, 500 y 1000 muestras. Cuando el número de muestras utilizado es suficientemente
grande, el error de ambos estimadores no afecta de forma apreciable al resultado de la
ordenación y al nivel de ruido final. Si la longitud de la ventana es pequeña, el error del
estimador puede afectar a la ordenación de ciclos con niveles de ruido similares y además al
nivel de ruido estimado, especialmente en el primer estimador, donde se puede llegar a tener
errores del 80% en la estimación. Sin embargo, si existe una gran discrepancia en los niveles de
ruido, latidos muy ruidosos y latidos poco ruidosos, la clasificación de latidos será correcta y
probablemente los latidos más ruidosos no se incluyan en el promediado.
La determinación del intervalo de tolerancia para la evolución de la variancia del ruido
de la señal promediada no siempre es posible a partir de múltiples realizaciones con lo cual
debe estimarse a partir de la propia variancia tal como se ha analizado en el apartado 3.2.4. Si el
número de ciclos promediados es suficientemente grande el estimador de la variancia puede
aproximarse a una ley normal con lo cual el intervalo de confianza queda fijado. Para evaluar la
calidad de la aproximación se contrastaron los resultados de las simulaciones anteriores, 100
realizaciones, donde se fijaban los intervalos de tolerancia máximo y mínimo, con los
determinados a partir de (3.63) para un nivel de tolerancia del 99% . En la figura 3.17 puede
verse la similitud entre ambos resultados dando cuenta de la bondad de la aproximación.
Tabla 3. 3 Error máximo y medio de los dos estimadores en función del número de puntos para unadistribución de variancias uniforme y diferente longitud de ventana.
Número de muestras 100 300 500 1000Error Max. (1er estimador) 81% 46% 40% 32%Error Medio (1er estimador) 62% 35% 28% 20%Error Max. (2º estimador) 14% 7% 5% 4%Error Medio (2º estimador) 9% 5% 4% 3%

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.35
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
número de ciclo (a)
Var
ianc
ia u
V^2
x valor medio simulación_ valor teórico...máximo/mínimo simulación
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
número de ciclo (b)
Var
ianc
ia u
V^2
x valor medio simulación_ valor teórico...máximo/mínimo simulación
Figura 3. 16 Evolución de la variancia del ruido de la señal promediada para los dos estimadores (a yb) junto a los intervalos de tolerancia obtenidos empíricamente a partir de varias simulaciones.
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
número de ciclo (a)
Var
ianc
ia u
V^2
_ valor medio simulación...máximo/mínimo simulación
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
número de ciclo (b)
Var
ianc
ia u
V^2
_ valor medio simulación...Intervalo de confianza 5%
Figura 3. 17 Intervalos de confianza para el ruido de la señal promediada determinados a partir de 100realizaciones (a) y mediante la expresión (3.63) (b)

3.36 Detección de micropotenciales auriculares de alta frecuencia
3.2.2 Resultados del promediado ordenado con ECG reales
3.2.2.1 Métodos
La validez del método de promediado ordenado ha quedado patente en las
simulaciones. Sin embargo, para poder ser aceptada como una técnica válida para la reducción
del ruido en el ECG debe validarse sobre registros reales.
Se procesaron registros de ECG superficial con las derivaciones estándar I, II y
V6-V6R y registros de ECG esofágico con derivaciones bipolares y unipolares.
Los registros se filtraron paso alto previamente para eliminar las componentes de baja
frecuencia presentes en la señal debidas a la respiración y variaciones del potencial de contacto
de los electrodos. La presencia de este ruido de baja frecuencia no influye en la detección de
micropotenciales pero introduce un sesgo en la estimación de la variancia del ruido si la
ventana de análisis de ruido es grande. Por contra, si se hace pequeña la ventana aumenta el
error aleatorio en la estimación del ruido. Se probaron dos filtros con respuesta tipo
Butterworth de 2º orden con frecuencias de corte de 20 Hz y 40 Hz.
Una vez filtrado el registro se estimaba la variancia del ruido dentro del intervalo
isoeléctrico T-P, en una ventana de 150 ms. A continuación se ordenaban los latidos de menor a
mayor variancia y se estimaba el nivel de ruido de la señal promediada en función del número
de latidos promediados, buscando el mínimo de esta serie. El paso siguiente fue promediar
estos latidos.
3.2.2.2 Resultados
Los resultados del promediado ordenado pueden verse en las tablas 3.4 y 3.5 para los
registros de ECG superficial y esofágico respectivamente. En ellas se muestra el número total
de registros procesados, filtrados a 20 Hz y 40 Hz, en los que la reducción del nivel de ruido
mejoraba, empeoraba o bien se era la misma. También se han clasificado según el resultado de
aplicar dos tests de estacionariedad diferentes, test de las ordenaciones invertidas (RAT ) y run-
test (R-T) (Bendat y Piersol 1986). R-T = 0 ó RAT = 0 indica que el registro no ha superado el
test con un nivel de significación del 5% y R-T = 1 ó RAT = 1 sí. También se ha representado
en la tabla adjunta el número total de registros en que mejoraba, empeoraba o quedaba igual el
nivel de ruido y la diferencia máxima obtenida respecto al promediado clásico.

Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.37
A la vista de los resultados podemos afirmar que se obtiene una mejora significativa en
la reducción del ruido mediante el promediado ordenado cuando el ruido que contamina a la
señal es claramente no estacionario, no pasa ninguno de los tests de estacionariedad, y existe
una gran diferencia entre la variancia máxima y mínima de ruido, prevaleciendo los latidos
poco ruidosos. Por contra, el peor resultado para 20 Hz y 40 Hz se obtiene con registros que sí
pasan el test de estacionariedad, aunque el aumento en el nivel de ruido es pequeño (27%). En
Mejora Empeora Igual
20 Hz 29 (-94%) 12 (22%) 61
40 Hz 27 (-92%) 13 (14%) 62
Tabla 3. 4 Resultados del promediado ordenado de 75 registros en derivaciones esofágicas unipolares ybipolares.
Mejora Empeora Igual
20 Hz 40 Hz 20 Hz 40 Hz 20 Hz 40 HzRAT=0R-T=0
8 5 4 0 4 10
RAT=1R-T=0
1 2 3 1 4 4
RAT=0R-T=1
7 5 0 0 7 10
RAT=1 R-T=1
11 9 4 4 22 25
Mejora Empeora Igual
20 Hz 27 (-81%) 11 (22%) 37
40 Hz 21 (-64%) 5 (27%) 55
Tabla 3. 5 Resultados del promediado ordenado de 102 registros en derivaciones superficiales.
Mejora Empeora Igual
20 Hz 40 Hz 20 Hz 40 Hz 20 Hz 40 HzRAT=0R-T=0
14 15 3 4 8 11
RAT=1R-T=0
10 6 3 4 9 11
RAT=0R-T=1
3 3 1 1 18 16
RAT=1 R-T=1
2 3 5 4 26 24

3.38 Detección de micropotenciales auriculares de alta frecuencia
los registros esofágicos, pocos son los casos en los que empeora el ruido al aplicar el
promediado ordenado y en el caso de filtrar a 40 Hz la mayoría, 4 registros de 5, son registros
que pasan el test de estacionariedad.
Estos resultados se dan en mayor medida en aquellas derivaciones que se ven más
afectadas por el electromiograma respiratorio y las que incluyen latidos en los cuales el
paciente se ha movido durante el registro. En los registros esofágicos no se obtiene una mejora
tan apreciable por la misma causa. El electromiograma de respiración y de músculos
esqueletales no tiene una presencia tan acusada como en las derivaciones superficiales. La
única causa de inestabilidad está ligada al desplazamiento brusco del electrodo esofágico que sí
llevaría asociado un artefacto de ruido a alta frecuencia.
En la figura 3.18 se ha representado el resultado de aplicar el promediado convencional
y el ordenado a un registro donde el ruido era claramente no estacionario y no superaba
ninguno de los tests de estacionariedad. Puede verse cómo promediando los 95 latidos menos
ruidosos de 135 se obtiene una mejora considerable del nivel de ruido, figura 3.19.
Como resumen se puede afirmar que el número de ciclos que deben promediarse
cuando el ruido no es estacionario no tiene por que ser necesariamente el total de los
disponibles. Un criterio que podría ser válido para la aplicación del método de promediado
0 50 100 150 200 250 300 350 400 450 500-0.01
-0.005
0
0.005
0.01Promediado normal, ruido=1.1uVef
ms
mV
Ventana de ruido
0 50 100 150 200 250 300 350 400 450 500-0.01
-0.005
0
0.005
0.01Promediado ordenado, ruido=0.3uVef
ms
mV
Ventana de ruido
Figura 3. 18 Resultado del promediado normal (a) y promediado ordenado (b) en un ECG realadquirido en la derivación STD I.
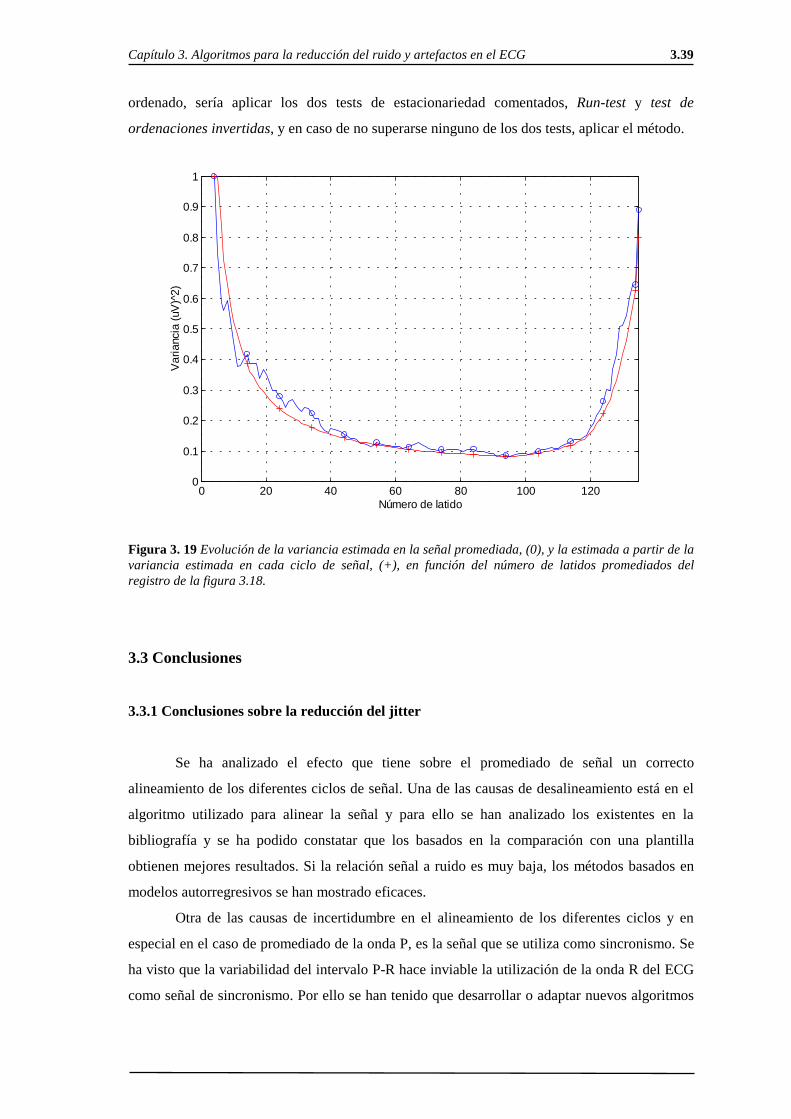
Capítulo 3. Algoritmos para la reducción del ruido y artefactos en el ECG 3.39
ordenado, sería aplicar los dos tests de estacionariedad comentados, Run-test y test de
ordenaciones invertidas, y en caso de no superarse ninguno de los dos tests, aplicar el método.
3.3 Conclusiones
3.3.1 Conclusiones sobre la reducción del jitter
Se ha analizado el efecto que tiene sobre el promediado de señal un correcto
alineamiento de los diferentes ciclos de señal. Una de las causas de desalineamiento está en el
algoritmo utilizado para alinear la señal y para ello se han analizado los existentes en la
bibliografía y se ha podido constatar que los basados en la comparación con una plantilla
obtienen mejores resultados. Si la relación señal a ruido es muy baja, los métodos basados en
modelos autorregresivos se han mostrado eficaces.
Otra de las causas de incertidumbre en el alineamiento de los diferentes ciclos y en
especial en el caso de promediado de la onda P, es la señal que se utiliza como sincronismo. Se
ha visto que la variabilidad del intervalo P-R hace inviable la utilización de la onda R del ECG
como señal de sincronismo. Por ello se han tenido que desarrollar o adaptar nuevos algoritmos
0 20 40 60 80 100 1200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Número de latido
Var
ianc
ia (u
V)^
2)
Figura 3. 19 Evolución de la variancia estimada en la señal promediada, (0), y la estimada a partir de lavariancia estimada en cada ciclo de señal, (+), en función del número de latidos promediados delregistro de la figura 3.18.

3.40 Detección de micropotenciales auriculares de alta frecuencia
para la detección correcta de la onda P en las derivaciones superficiales y esofágicas. La
disponibilidad de registros simultáneos con derivaciones superficiales y esofágicas ha
permitido mejorar los algoritmos. La evaluación del jitter es un parámetro de calidad que nos
permite validar los resultados del promediado.
3.3.2 Conclusiones sobre el promediado ordenado
Se ha propuesto un nuevo método de promediado que considera la no estacionariedad
del ruido y que intenta establecer criterios cuantitativos de análisis y procesado de la señal para
reducir el ruido hasta el mínimo posible con los latidos disponibles en ese registro. Además,
permite de una forma sistemática rechazar aquellos latidos que no contribuyen a la reducción
del ruido.
La evaluación del ruido de la señal promediada también es un punto importante. Se ha
analizado uno de los métodos habituales en la bibliografía para la determinación del ruido de la
señal promediada y se ha propuesto uno nuevo que permite reducir la incertidumbre, o error
aleatorio, del estimador. El error en el estimador del ruido de cada ciclo para el promediado
ordenado no tiene una importancia significativa y se mantiene dentro de unos límites
aceptables.