







Idiomas
Páginas
Jurídico

ELECTRÓNICA DE CONTROL CONTINUO. 1
DEPARTAMENTO
DE ELECTRÓNICA
Universidad de Alcalá
TEMA 4TEMA 4
ELECTRÓNICA DE
CONTROL CONTINUO
SISTEMAS ELECTRÓNICOS DE CONTROL CONTINUO
I.T.T. SISTEMAS ELECTRÓNICOS
Curso 2000/2001

ELECTRÓNICA DE CONTROL CONTINUO. 2
SISTEMAS ECOS DE CONTROL CONTINUO.
Fig. 1 Curvas de relación velocidad, par,corriente y rendimiento de un motor DC enrégimen permanente.
1. REVISIÓN DEL MODELADO DE UN MOTOR DE CORRIENTE CONTINUA.
Los motores de corriente continua, gracias a la combinación de eficacia,facilidad de control y excitación y durabilidad, se emplean con profusión en lamayoría de los sistemas robóticos y de control. Por ello, es necesario conocer cómoson y cómo funcionan los circuitos electrónicos empleados para su excitación.
La ecuación eléctrica que define el comportamiento del motor de continua es:
.V R i t Ldi t
dtK ta a a
aE= + +( )
( )( )ω
En régimen permanente, las relaciones básicas de un motor DC son:
IV K
RT K Ia
E
aM a=
−⇒ =
ωη
ω= =
P
P
T
VIutil
entrada a
Que representadas quedan (fig. 1)
Luego en un motor de DC puede actuarse sobre dos parámetros:
a) Variar la corriente para modificar el par. (Control de corriente). Lacorriente por el motor determina el par que éste produce. Cuando el motor norealiza un trabajo útil o no debe vencer un rozamiento, un aumento/disminución dela corriente se traduce en una aceleración o desaceleración del motor,independiente de la velocidad con la que se encuentre girando.
b) Modificar la tensión, dado un par, para variar la velocidad del motor.(Control de tensión). Como la corriente por el motor viene determinada por la sumade pares que debe vencer, un aumento/disminución de la tensión aplicada al motorse traduce en un aumento/disminución de la velocidad de giro del mismo.
ELECTRÓNICA DE CONTROL CONTINUO. 3
SISTEMAS ECOS DE CONTROL CONTINUO.
2. POSIBILIDADES DE CONTROL DE UN MOTOR DC.
Un motor se puede controlar en lazo abierto o cerrado. Un control en lazocerrado garantiza la velocidad o posición del motor (dentro de ciertos límites),incluso en el caso de la aparición de perturbaciones externas o cambios en losparámetros de los elementos que componen el control.
El control en lazo abierto es útil cuando la precisión del control no esesencial, como por ejemplo en elevalunas eléctricos, limpiaparabrisas, ventiladoreseléctricos, etc.
A su vez, en cualquiera de los dos modos de control anteriores, puedeelegirse por actuar sobre el motor variando la tensión (control por tensión) ovariando la corriente (control por corriente)
3. MODOS DE FUNCIONAMIENTO DE UN MOTOR DC.
Considerando la tensión y corriente por el motor, pueden definirse los modosde funcionamiento. Como un motor, desde el punto de vista eléctrico, introduce unelemento inductivo, la corriente y tensión del motor no suelen encontrarse en fase.Eligiendo un sistema de coordenadas con abscisas Ia o T y ordenadas V o T,pueden distinguirse los siguientes cuadrantes de funcionamiento:
* Primer cuadrante: Tanto la tensión del motor, como la corriente que loatraviesa son positivas, esto es, la energía fluye de la batería al motor.
* Segundo cuadrante: La tensión del motor es positiva, pero la corriente esnegativa, esto es, la energía fluye del motor a la batería (funcionamientoregenerativo).
* Tercer cuadrante: Tanto la tensión como la corriente del motor sonnegativas. En este caso la batería entrega energía la motor, pero el motor gira ensentido contrario al caso del primer cuadrante..
* Cuarto cuadrante: La tensión del motor es negativa y la corriente positiva.La energía fluye del motor a la batería.
Para determinar el cuadrante de funcionamiento debe resolverse el sistemade ecuaciones diferenciales que rigen al motor, cuyo resultado dependerá de losvalores de los parámetros del mismo( Ra, La, Km y Ke), del par aplicado (T) y dela carga (J, f).
Por ejemplo, para un motor con Km=0.09, Ke=0.03, L=0.1, R=1, J=0.01,f=0.0001, siendo la entrada un tren de pulsos de amplitud ±5 y un par de frenado de1, resultará (fig. 2):
ELECTRÓNICA DE CONTROL CONTINUO. 4
SISTEMAS ECOS DE CONTROL CONTINUO.
0 0 . 5 1 1 . 5 2 2 . 5 3 3 . 5 4- 6
- 4
- 2
0
2
4
6
8
1 e r C
2 º C
3 e r C
4 º C
Fig.2. Formas de onda de la corriente y tensión de un motor DC.
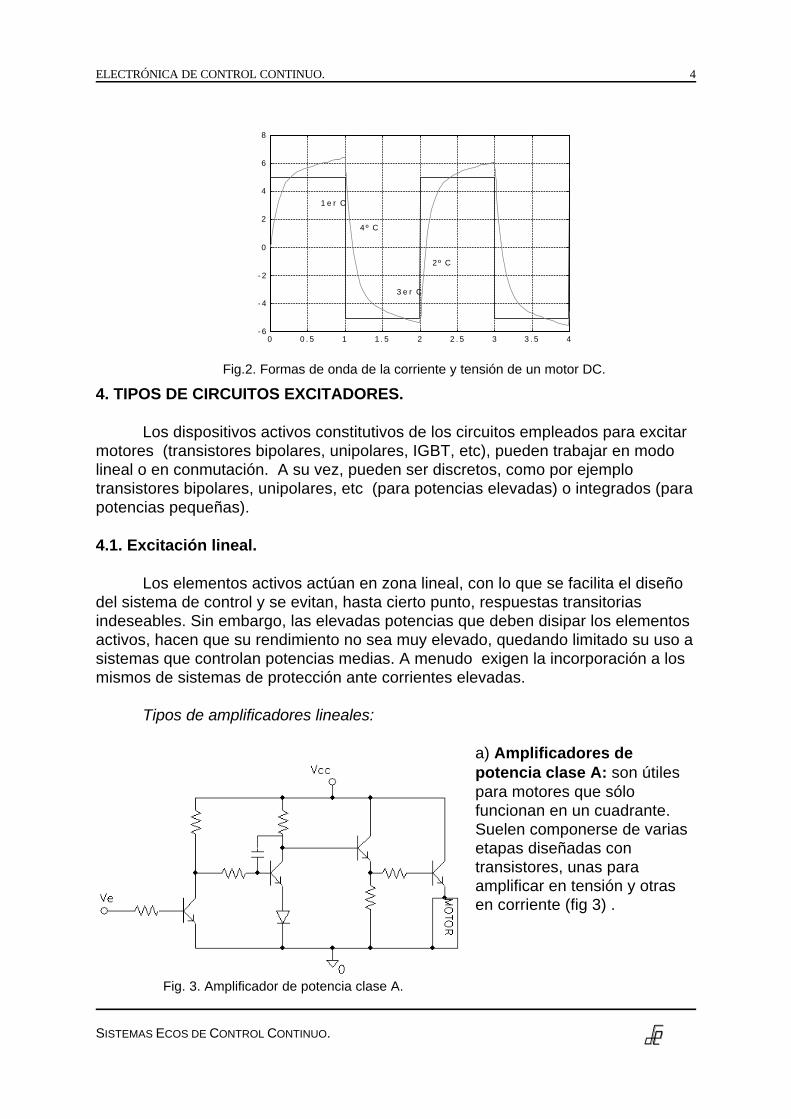
Fig. 3. Amplificador de potencia clase A.
4. TIPOS DE CIRCUITOS EXCITADORES.
Los dispositivos activos constitutivos de los circuitos empleados para excitarmotores (transistores bipolares, unipolares, IGBT, etc), pueden trabajar en modolineal o en conmutación. A su vez, pueden ser discretos, como por ejemplotransistores bipolares, unipolares, etc (para potencias elevadas) o integrados (parapotencias pequeñas).
4.1. Excitación lineal.
Los elementos activos actúan en zona lineal, con lo que se facilita el diseñodel sistema de control y se evitan, hasta cierto punto, respuestas transitoriasindeseables. Sin embargo, las elevadas potencias que deben disipar los elementosactivos, hacen que su rendimiento no sea muy elevado, quedando limitado su uso a sistemas que controlan potencias medias. A menudo exigen la incorporación a losmismos de sistemas de protección ante corrientes elevadas.
Tipos de amplificadores lineales:
a) Amplificadores depotencia clase A: son útilespara motores que sólofuncionan en un cuadrante.Suelen componerse de variasetapas diseñadas contransistores, unas paraamplificar en tensión y otrasen corriente (fig 3) .
ELECTRÓNICA DE CONTROL CONTINUO. 5
SISTEMAS ECOS DE CONTROL CONTINUO.
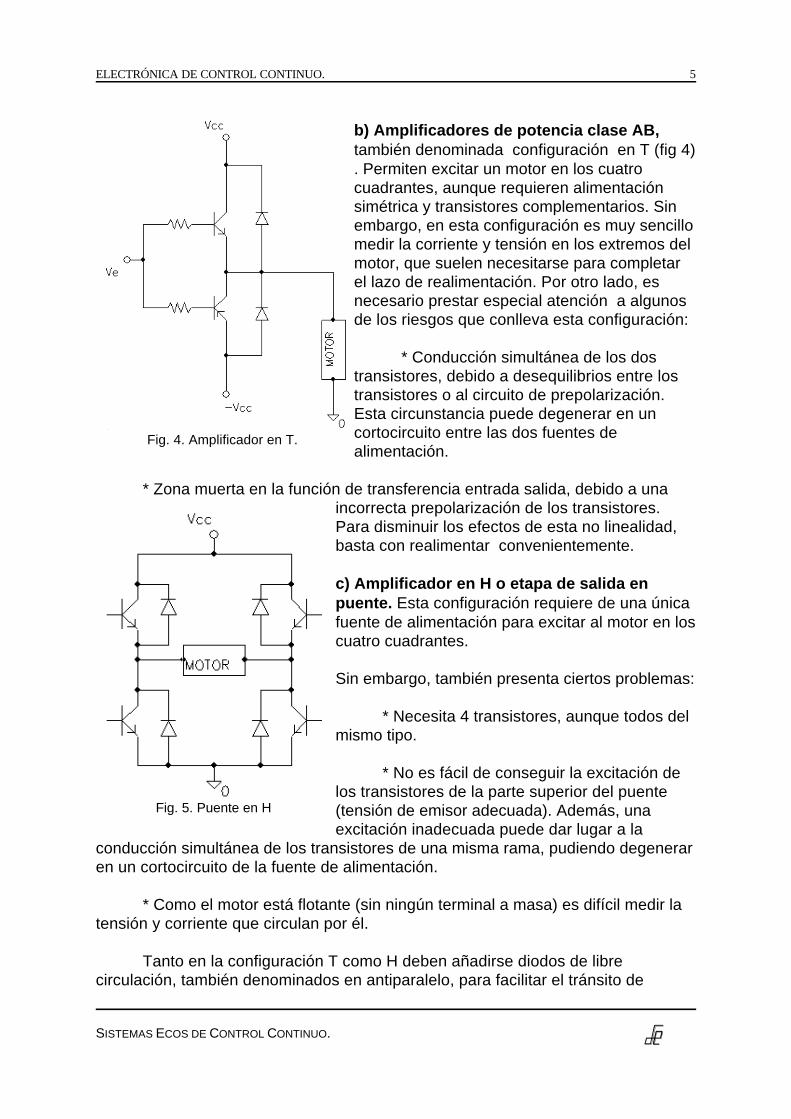
Fig. 4. Amplificador en T.
Fig. 5. Puente en H
b) Amplificadores de potencia clase AB,también denominada configuración en T (fig 4). Permiten excitar un motor en los cuatrocuadrantes, aunque requieren alimentaciónsimétrica y transistores complementarios. Sinembargo, en esta configuración es muy sencillomedir la corriente y tensión en los extremos delmotor, que suelen necesitarse para completarel lazo de realimentación. Por otro lado, esnecesario prestar especial atención a algunosde los riesgos que conlleva esta configuración:
* Conducción simultánea de los dostransistores, debido a desequilibrios entre lostransistores o al circuito de prepolarización.Esta circunstancia puede degenerar en uncortocircuito entre las dos fuentes dealimentación.
* Zona muerta en la función de transferencia entrada salida, debido a unaincorrecta prepolarización de los transistores.Para disminuir los efectos de esta no linealidad,basta con realimentar convenientemente.
c) Amplificador en H o etapa de salida enpuente. Esta configuración requiere de una únicafuente de alimentación para excitar al motor en loscuatro cuadrantes.
Sin embargo, también presenta ciertos problemas:
* Necesita 4 transistores, aunque todos delmismo tipo.
* No es fácil de conseguir la excitación delos transistores de la parte superior del puente(tensión de emisor adecuada). Además, unaexcitación inadecuada puede dar lugar a la
conducción simultánea de los transistores de una misma rama, pudiendo degeneraren un cortocircuito de la fuente de alimentación.
* Como el motor está flotante (sin ningún terminal a masa) es difícil medir latensión y corriente que circulan por él.
Tanto en la configuración T como H deben añadirse diodos de librecirculación, también denominados en antiparalelo, para facilitar el tránsito de
ELECTRÓNICA DE CONTROL CONTINUO. 6
SISTEMAS ECOS DE CONTROL CONTINUO.
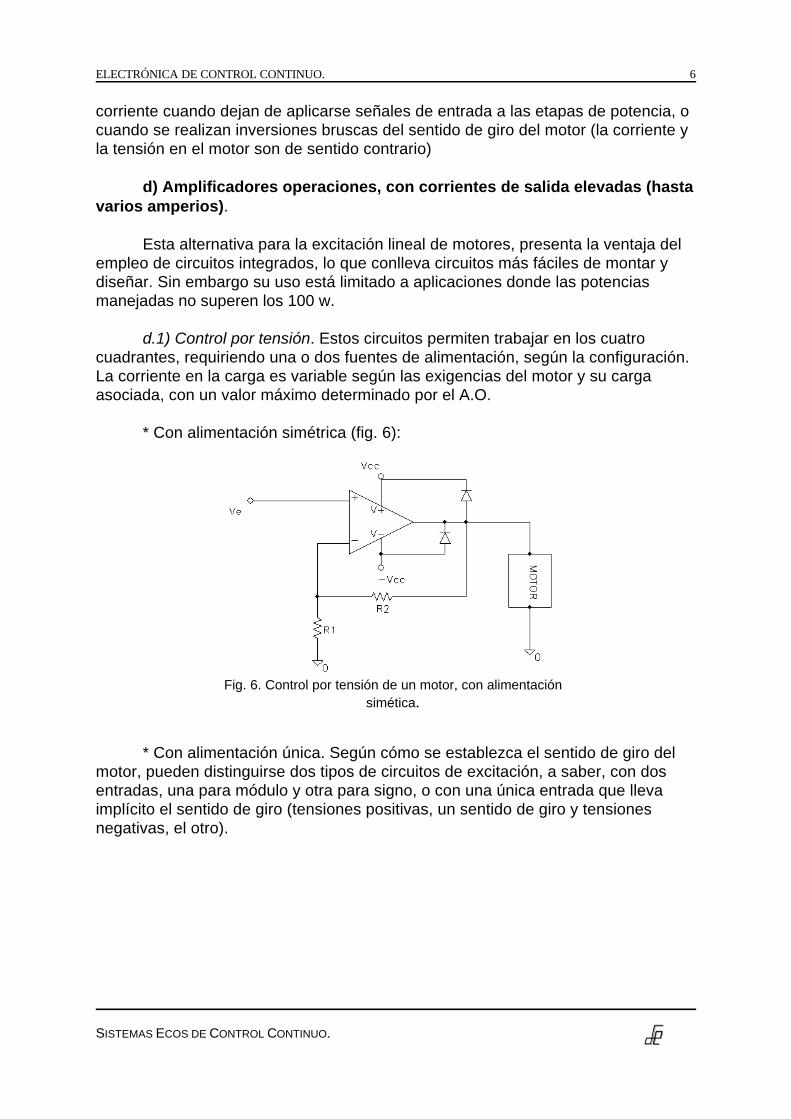
Fig. 6. Control por tensión de un motor, con alimentaciónsimética.
corriente cuando dejan de aplicarse señales de entrada a las etapas de potencia, ocuando se realizan inversiones bruscas del sentido de giro del motor (la corriente yla tensión en el motor son de sentido contrario)
d) Amplificadores operaciones, con corrientes de salida elevadas (hastavarios amperios).
Esta alternativa para la excitación lineal de motores, presenta la ventaja delempleo de circuitos integrados, lo que conlleva circuitos más fáciles de montar ydiseñar. Sin embargo su uso está limitado a aplicaciones donde las potenciasmanejadas no superen los 100 w.
d.1) Control por tensión. Estos circuitos permiten trabajar en los cuatrocuadrantes, requiriendo una o dos fuentes de alimentación, según la configuración. La corriente en la carga es variable según las exigencias del motor y su cargaasociada, con un valor máximo determinado por el A.O.
* Con alimentación simétrica (fig. 6):
* Con alimentación única. Según cómo se establezca el sentido de giro delmotor, pueden distinguirse dos tipos de circuitos de excitación, a saber, con dosentradas, una para módulo y otra para signo, o con una única entrada que llevaimplícito el sentido de giro (tensiones positivas, un sentido de giro y tensionesnegativas, el otro).
ELECTRÓNICA DE CONTROL CONTINUO. 7
SISTEMAS ECOS DE CONTROL CONTINUO.
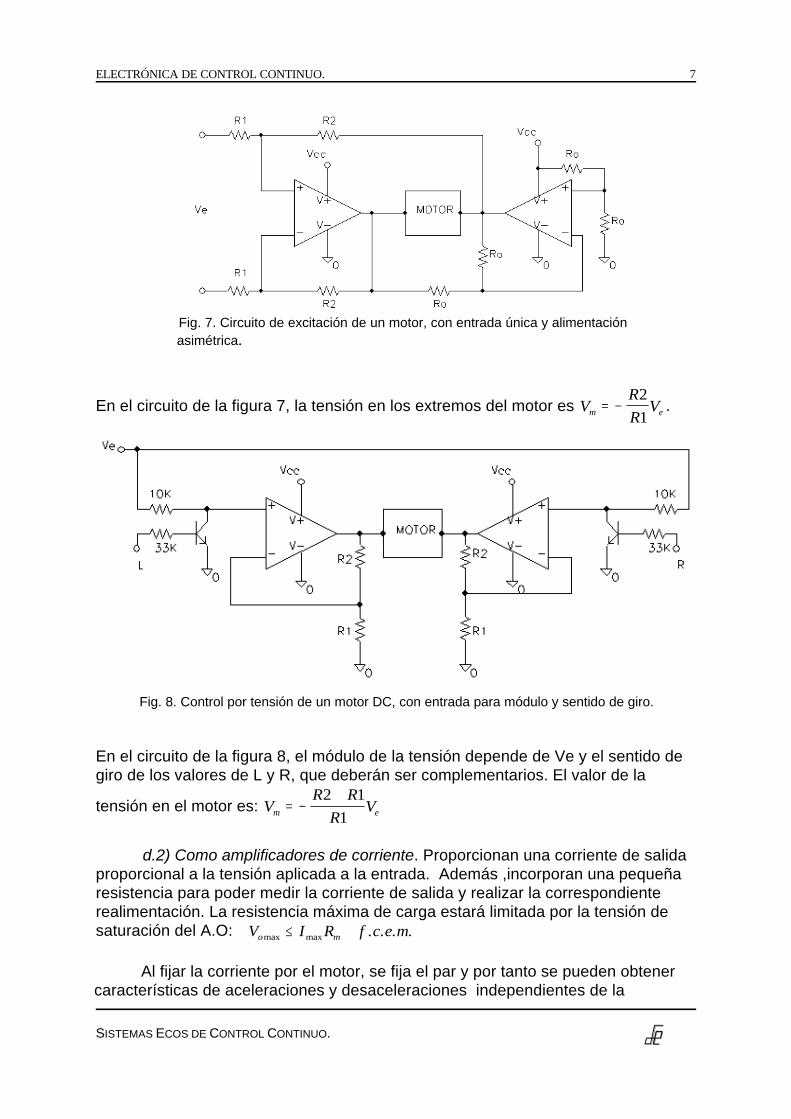
Fig. 7. Circuito de excitación de un motor, con entrada única y alimentaciónasimétrica.
Fig. 8. Control por tensión de un motor DC, con entrada para módulo y sentido de giro.
En el circuito de la figura 7, la tensión en los extremos del motor es .VR
RVm e= −
2
1
En el circuito de la figura 8, el módulo de la tensión depende de Ve y el sentido degiro de los valores de L y R, que deberán ser complementarios. El valor de la
tensión en el motor es: VR R
RVm e= −
+2 1
1
d.2) Como amplificadores de corriente. Proporcionan una corriente de salidaproporcional a la tensión aplicada a la entrada. Además ,incorporan una pequeñaresistencia para poder medir la corriente de salida y realizar la correspondienterealimentación. La resistencia máxima de carga estará limitada por la tensión desaturación del A.O: V I R f c e mo mmax max . . . .≤ +
Al fijar la corriente por el motor, se fija el par y por tanto se pueden obtenercaracterísticas de aceleraciones y desaceleraciones independientes de la
ELECTRÓNICA DE CONTROL CONTINUO. 8
SISTEMAS ECOS DE CONTROL CONTINUO.
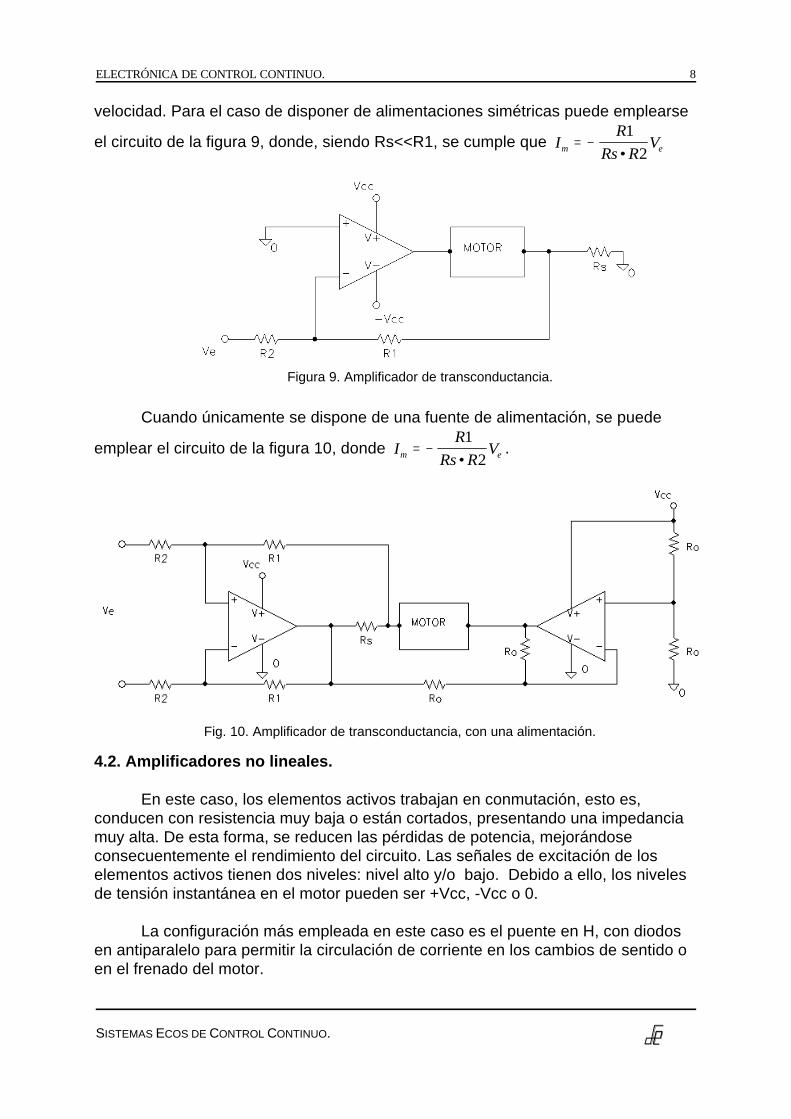
Figura 9. Amplificador de transconductancia.
Fig. 10. Amplificador de transconductancia, con una alimentación.
velocidad. Para el caso de disponer de alimentaciones simétricas puede emplearse
el circuito de la figura 9, donde, siendo Rs<<R1, se cumple que IR
Rs RVm e= −
1
2•
Cuando únicamente se dispone de una fuente de alimentación, se puede
emplear el circuito de la figura 10, donde .IR
Rs RVm e= −
1
2•
4.2. Amplificadores no lineales.
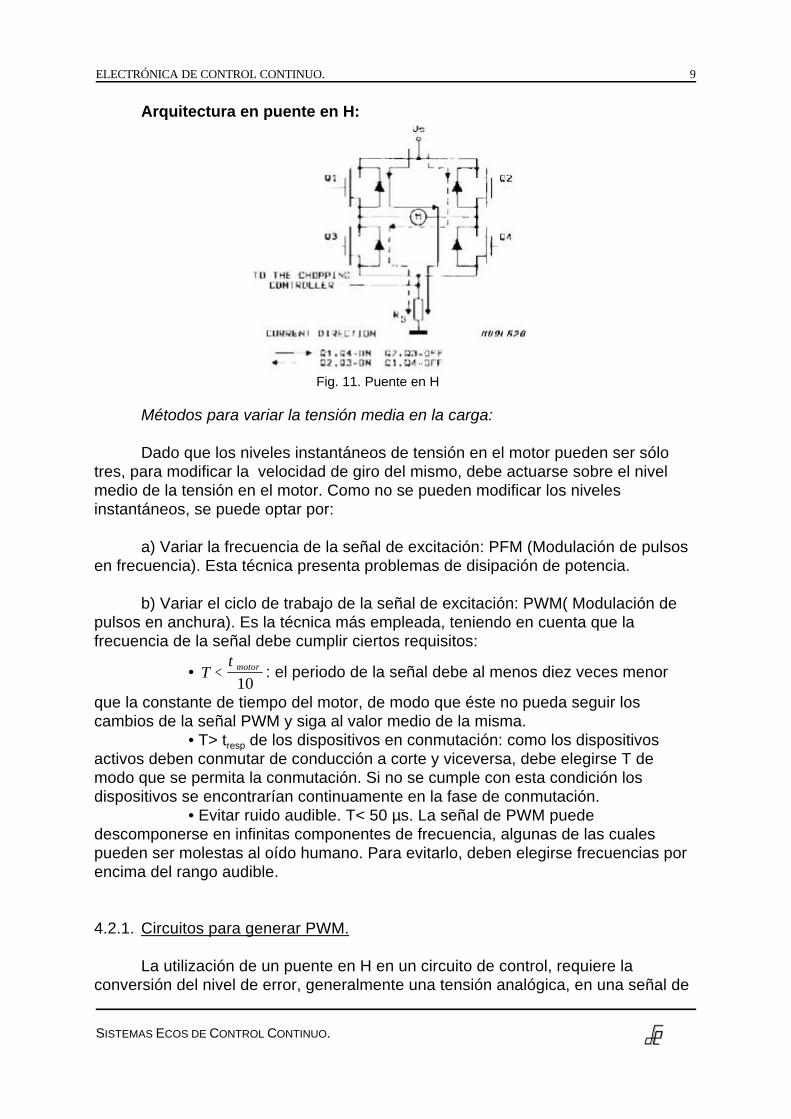
En este caso, los elementos activos trabajan en conmutación, esto es, conducen con resistencia muy baja o están cortados, presentando una impedanciamuy alta. De esta forma, se reducen las pérdidas de potencia, mejorándoseconsecuentemente el rendimiento del circuito. Las señales de excitación de loselementos activos tienen dos niveles: nivel alto y/o bajo. Debido a ello, los nivelesde tensión instantánea en el motor pueden ser +Vcc, -Vcc o 0.
La configuración más empleada en este caso es el puente en H, con diodosen antiparalelo para permitir la circulación de corriente en los cambios de sentido oen el frenado del motor.
ELECTRÓNICA DE CONTROL CONTINUO. 9
SISTEMAS ECOS DE CONTROL CONTINUO.
Fig. 11. Puente en H
Arquitectura en puente en H:
Métodos para variar la tensión media en la carga:
Dado que los niveles instantáneos de tensión en el motor pueden ser sólotres, para modificar la velocidad de giro del mismo, debe actuarse sobre el nivelmedio de la tensión en el motor. Como no se pueden modificar los nivelesinstantáneos, se puede optar por:
a) Variar la frecuencia de la señal de excitación: PFM (Modulación de pulsosen frecuencia). Esta técnica presenta problemas de disipación de potencia.
b) Variar el ciclo de trabajo de la señal de excitación: PWM( Modulación depulsos en anchura). Es la técnica más empleada, teniendo en cuenta que lafrecuencia de la señal debe cumplir ciertos requisitos:
• : el periodo de la señal debe al menos diez veces menorT motor<τ
10que la constante de tiempo del motor, de modo que éste no pueda seguir loscambios de la señal PWM y siga al valor medio de la misma.
• T> tresp de los dispositivos en conmutación: como los dispositivosactivos deben conmutar de conducción a corte y viceversa, debe elegirse T demodo que se permita la conmutación. Si no se cumple con esta condición losdispositivos se encontrarían continuamente en la fase de conmutación.
• Evitar ruido audible. T< 50 µs. La señal de PWM puededescomponerse en infinitas componentes de frecuencia, algunas de las cualespueden ser molestas al oído humano. Para evitarlo, deben elegirse frecuencias porencima del rango audible.
4.2.1. Circuitos para generar PWM.
La utilización de un puente en H en un circuito de control, requiere laconversión del nivel de error, generalmente una tensión analógica, en una señal de
ELECTRÓNICA DE CONTROL CONTINUO. 10
SISTEMAS ECOS DE CONTROL CONTINUO.
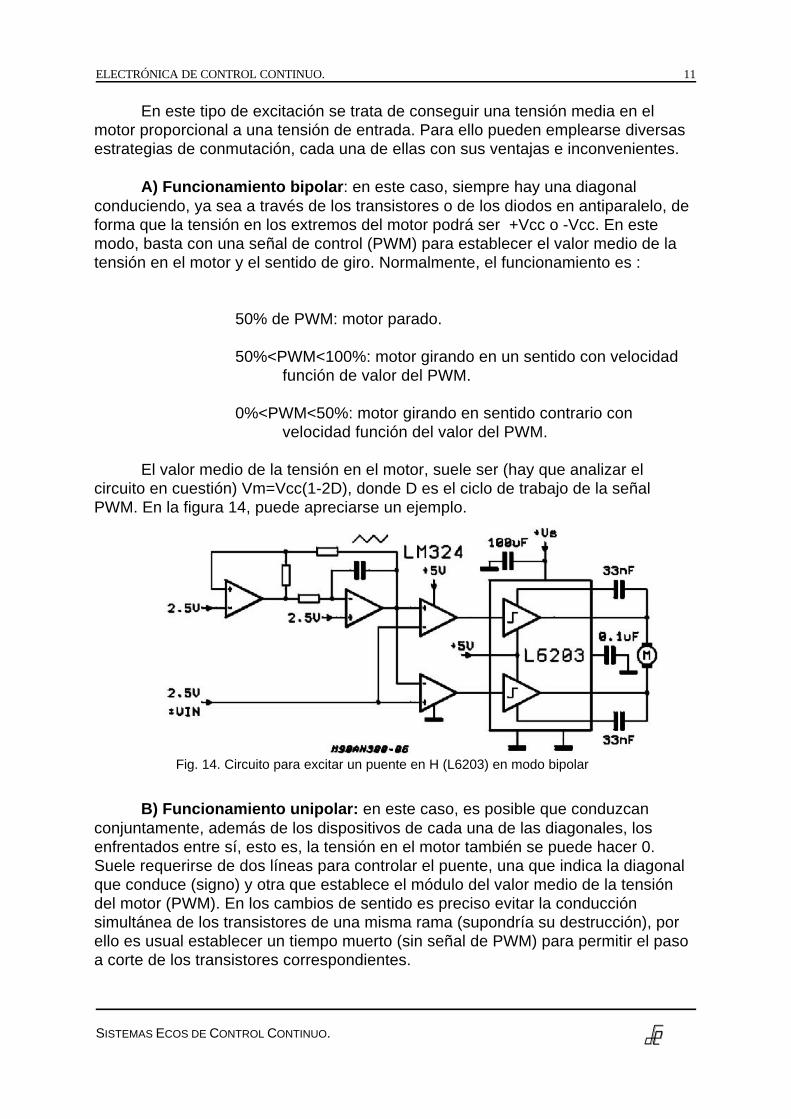
Figura 13. Circuito para general PWM.
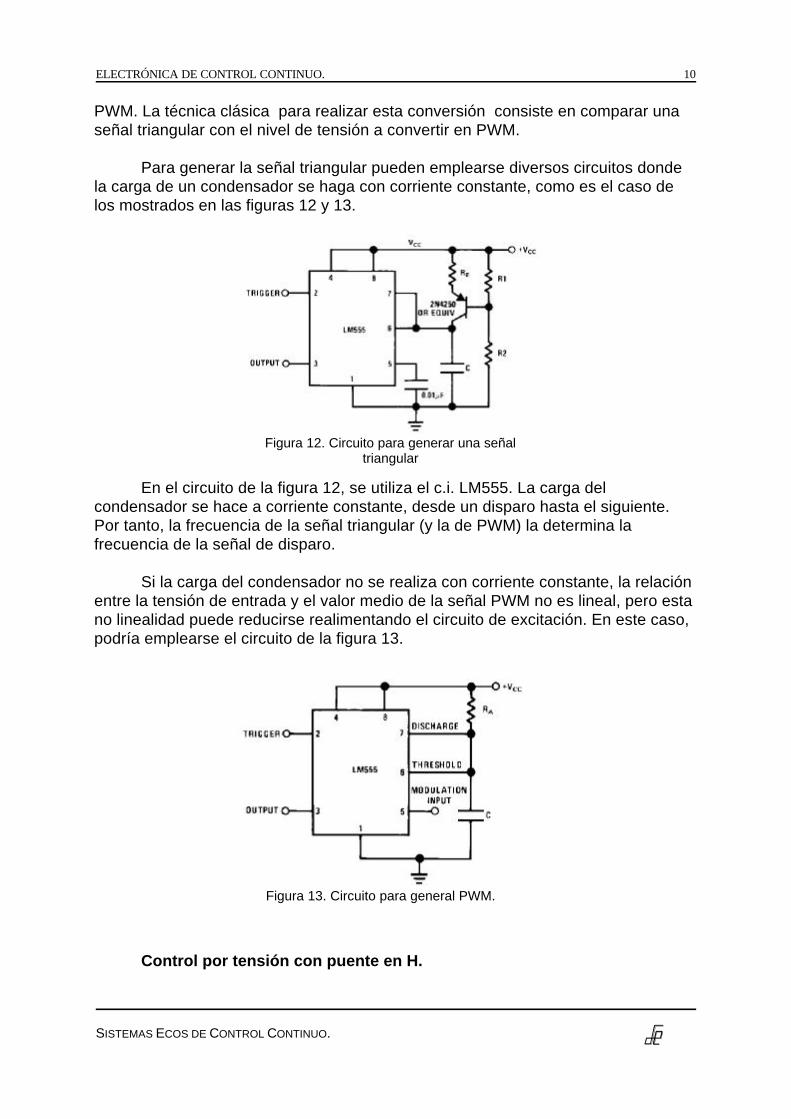
Figura 12. Circuito para generar una señaltriangular
PWM. La técnica clásica para realizar esta conversión consiste en comparar unaseñal triangular con el nivel de tensión a convertir en PWM.
Para generar la señal triangular pueden emplearse diversos circuitos dondela carga de un condensador se haga con corriente constante, como es el caso delos mostrados en las figuras 12 y 13.
En el circuito de la figura 12, se utiliza el c.i. LM555. La carga delcondensador se hace a corriente constante, desde un disparo hasta el siguiente.Por tanto, la frecuencia de la señal triangular (y la de PWM) la determina lafrecuencia de la señal de disparo.
Si la carga del condensador no se realiza con corriente constante, la relaciónentre la tensión de entrada y el valor medio de la señal PWM no es lineal, pero estano linealidad puede reducirse realimentando el circuito de excitación. En este caso,podría emplearse el circuito de la figura 13.
Control por tensión con puente en H.
ELECTRÓNICA DE CONTROL CONTINUO. 11
SISTEMAS ECOS DE CONTROL CONTINUO.
Fig. 14. Circuito para excitar un puente en H (L6203) en modo bipolar
En este tipo de excitación se trata de conseguir una tensión media en elmotor proporcional a una tensión de entrada. Para ello pueden emplearse diversasestrategias de conmutación, cada una de ellas con sus ventajas e inconvenientes.
A) Funcionamiento bipolar: en este caso, siempre hay una diagonalconduciendo, ya sea a través de los transistores o de los diodos en antiparalelo, deforma que la tensión en los extremos del motor podrá ser +Vcc o -Vcc. En estemodo, basta con una señal de control (PWM) para establecer el valor medio de latensión en el motor y el sentido de giro. Normalmente, el funcionamiento es :
50% de PWM: motor parado.
50%<PWM<100%: motor girando en un sentido con velocidadfunción de valor del PWM.
0%<PWM<50%: motor girando en sentido contrario convelocidad función del valor del PWM.
El valor medio de la tensión en el motor, suele ser (hay que analizar elcircuito en cuestión) Vm=Vcc(1-2D), donde D es el ciclo de trabajo de la señalPWM. En la figura 14, puede apreciarse un ejemplo.
B) Funcionamiento unipolar: en este caso, es posible que conduzcanconjuntamente, además de los dispositivos de cada una de las diagonales, losenfrentados entre sí, esto es, la tensión en el motor también se puede hacer 0.Suele requerirse de dos líneas para controlar el puente, una que indica la diagonalque conduce (signo) y otra que establece el módulo del valor medio de la tensióndel motor (PWM). En los cambios de sentido es preciso evitar la conducciónsimultánea de los transistores de una misma rama (supondría su destrucción), porello es usual establecer un tiempo muerto (sin señal de PWM) para permitir el pasoa corte de los transistores correspondientes.
ELECTRÓNICA DE CONTROL CONTINUO. 12
SISTEMAS ECOS DE CONTROL CONTINUO.
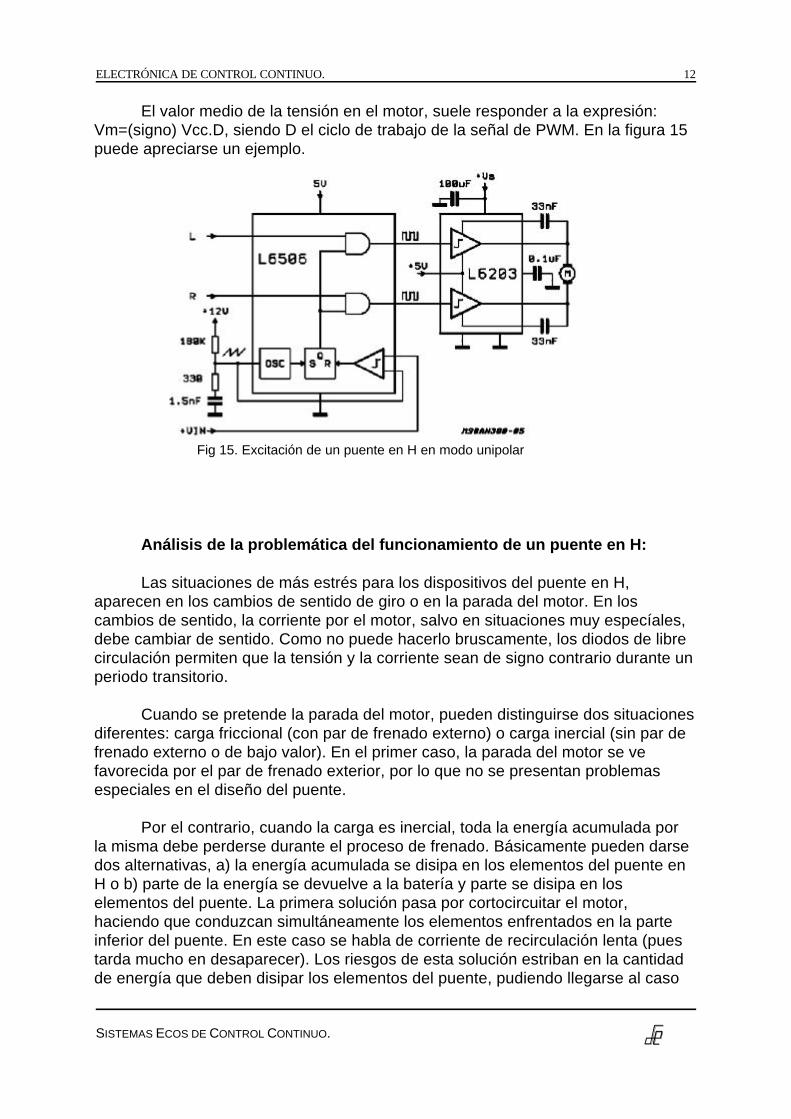
Fig 15. Excitación de un puente en H en modo unipolar
El valor medio de la tensión en el motor, suele responder a la expresión:Vm=(signo) Vcc.D, siendo D el ciclo de trabajo de la señal de PWM. En la figura 15puede apreciarse un ejemplo.
Análisis de la problemática del funcionamiento de un puente en H:
Las situaciones de más estrés para los dispositivos del puente en H,aparecen en los cambios de sentido de giro o en la parada del motor. En loscambios de sentido, la corriente por el motor, salvo en situaciones muy especíales,debe cambiar de sentido. Como no puede hacerlo bruscamente, los diodos de librecirculación permiten que la tensión y la corriente sean de signo contrario durante unperiodo transitorio.
Cuando se pretende la parada del motor, pueden distinguirse dos situacionesdiferentes: carga friccional (con par de frenado externo) o carga inercial (sin par defrenado externo o de bajo valor). En el primer caso, la parada del motor se vefavorecida por el par de frenado exterior, por lo que no se presentan problemasespeciales en el diseño del puente.
Por el contrario, cuando la carga es inercial, toda la energía acumulada porla misma debe perderse durante el proceso de frenado. Básicamente pueden darsedos alternativas, a) la energía acumulada se disipa en los elementos del puente enH o b) parte de la energía se devuelve a la batería y parte se disipa en loselementos del puente. La primera solución pasa por cortocircuitar el motor,haciendo que conduzcan simultáneamente los elementos enfrentados en la parteinferior del puente. En este caso se habla de corriente de recirculación lenta (puestarda mucho en desaparecer). Los riesgos de esta solución estriban en la cantidadde energía que deben disipar los elementos del puente, pudiendo llegarse al caso
ELECTRÓNICA DE CONTROL CONTINUO. 13
SISTEMAS ECOS DE CONTROL CONTINUO.
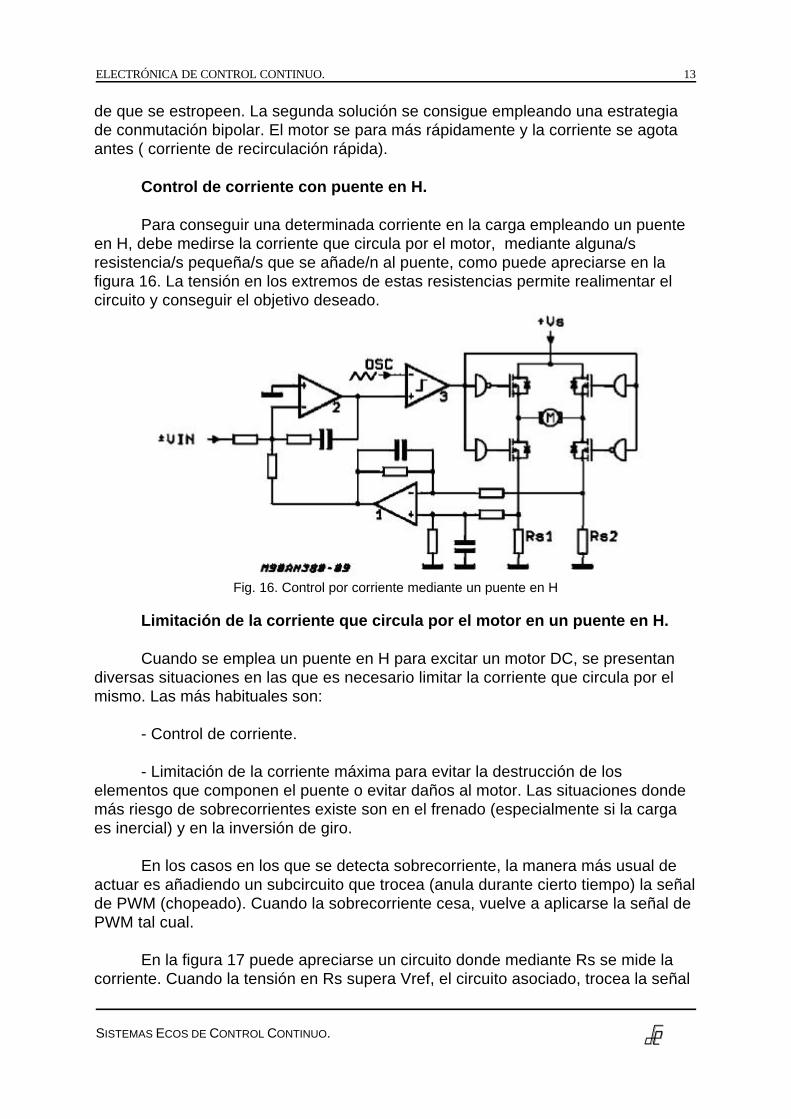
Fig. 16. Control por corriente mediante un puente en H
de que se estropeen. La segunda solución se consigue empleando una estrategiade conmutación bipolar. El motor se para más rápidamente y la corriente se agotaantes ( corriente de recirculación rápida).
Control de corriente con puente en H.
Para conseguir una determinada corriente en la carga empleando un puenteen H, debe medirse la corriente que circula por el motor, mediante alguna/sresistencia/s pequeña/s que se añade/n al puente, como puede apreciarse en lafigura 16. La tensión en los extremos de estas resistencias permite realimentar elcircuito y conseguir el objetivo deseado.
Limitación de la corriente que circula por el motor en un puente en H.
Cuando se emplea un puente en H para excitar un motor DC, se presentandiversas situaciones en las que es necesario limitar la corriente que circula por elmismo. Las más habituales son:
- Control de corriente.
- Limitación de la corriente máxima para evitar la destrucción de loselementos que componen el puente o evitar daños al motor. Las situaciones dondemás riesgo de sobrecorrientes existe son en el frenado (especialmente si la cargaes inercial) y en la inversión de giro.
En los casos en los que se detecta sobrecorriente, la manera más usual deactuar es añadiendo un subcircuito que trocea (anula durante cierto tiempo) la señalde PWM (chopeado). Cuando la sobrecorriente cesa, vuelve a aplicarse la señal dePWM tal cual.
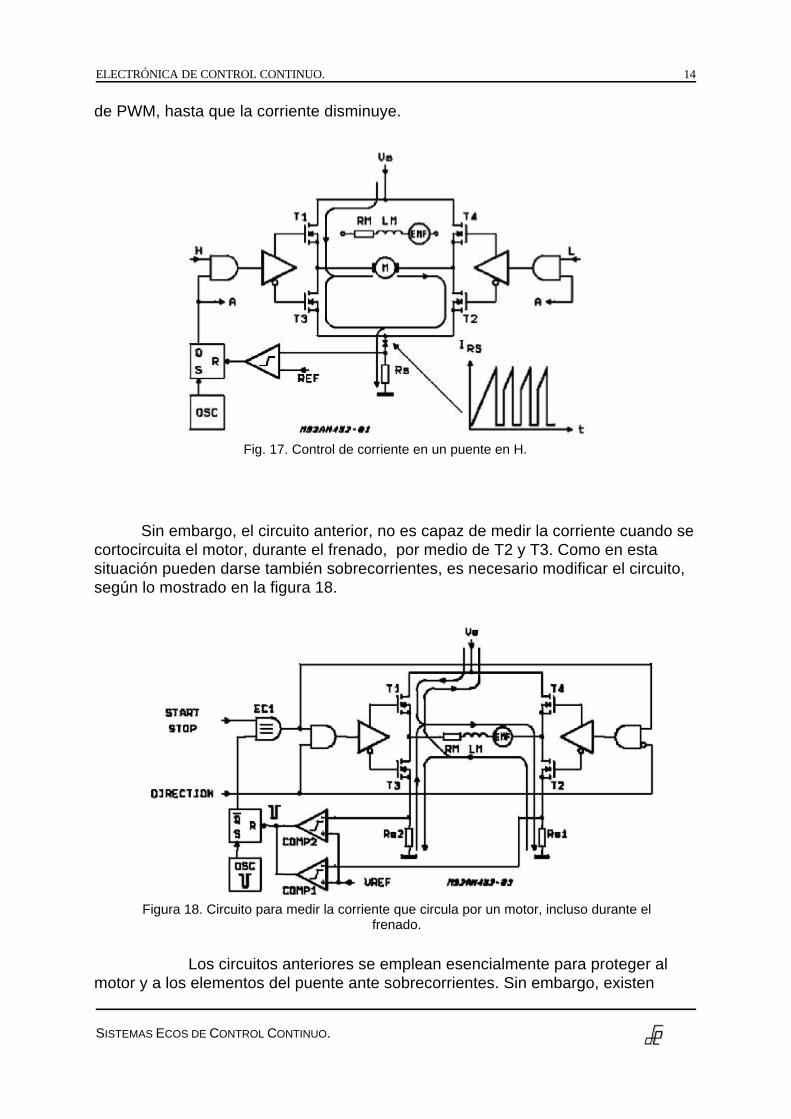
En la figura 17 puede apreciarse un circuito donde mediante Rs se mide lacorriente. Cuando la tensión en Rs supera Vref, el circuito asociado, trocea la señal
ELECTRÓNICA DE CONTROL CONTINUO. 14
SISTEMAS ECOS DE CONTROL CONTINUO.
Fig. 17. Control de corriente en un puente en H.
Figura 18. Circuito para medir la corriente que circula por un motor, incluso durante elfrenado.
de PWM, hasta que la corriente disminuye.
Sin embargo, el circuito anterior, no es capaz de medir la corriente cuando secortocircuita el motor, durante el frenado, por medio de T2 y T3. Como en estasituación pueden darse también sobrecorrientes, es necesario modificar el circuito,según lo mostrado en la figura 18.
Los circuitos anteriores se emplean esencialmente para proteger almotor y a los elementos del puente ante sobrecorrientes. Sin embargo, existen
ELECTRÓNICA DE CONTROL CONTINUO. 15
SISTEMAS ECOS DE CONTROL CONTINUO.
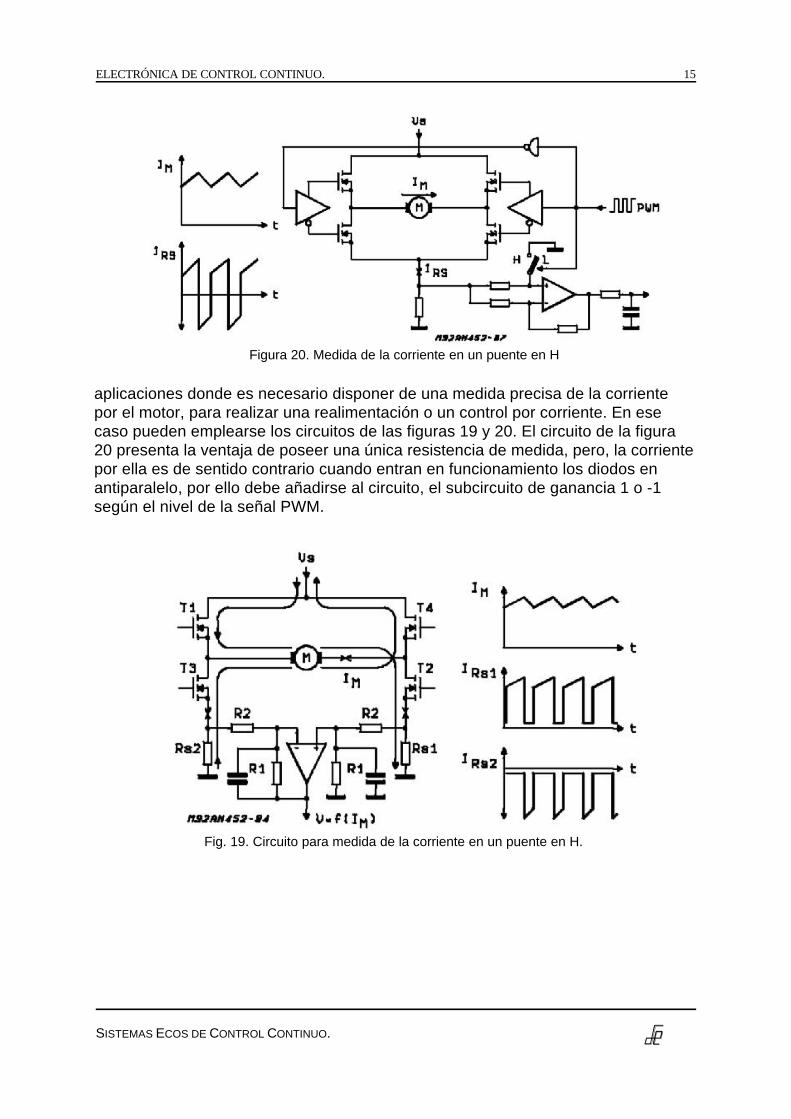
Fig. 19. Circuito para medida de la corriente en un puente en H.
Figura 20. Medida de la corriente en un puente en H
aplicaciones donde es necesario disponer de una medida precisa de la corrientepor el motor, para realizar una realimentación o un control por corriente. En esecaso pueden emplearse los circuitos de las figuras 19 y 20. El circuito de la figura20 presenta la ventaja de poseer una única resistencia de medida, pero, la corrientepor ella es de sentido contrario cuando entran en funcionamiento los diodos enantiparalelo, por ello debe añadirse al circuito, el subcircuito de ganancia 1 o -1según el nivel de la señal PWM.

ELECTRÓNICA DE CONTROL CONTINUO. 16
SISTEMAS ECOS DE CONTROL CONTINUO.
Top Related