




Idiomas
Páginas
Jurídico


P. Martínez 2011/2012
1 de 27
TEORÍA DE ESTRUCTURAS
Capítulo 4
Estructuras espaciales de nudos rígidos
Departamento de Estructuras y Construcción Universidad Politécnica de Cartagena

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012
2 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012
3 de 27
4.1 Introducción
• Este capítulo está dedicado a la aplicación del método de las rigideces para estructuras espaciales de nudos rígidos. Este es el caso más general, y cualquier estructura puede analizarse como estructura espacial de nudos rígidos, si bien con un costo computacional mayor que si se emplea una formulación más ajustada a la estructura a analizar
• La generalidad del método de las rigideces hace que la aplicación al resto de las estructuras (espaciales de nudos articulados, planas de nudos rígidos y emparrillados) pueden obtenerse siguiendo un procedimiento similar al de las estructuras espaciales de nudos rígidos.

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012
4 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012
5 de 27
4.2 Sistemas de coordenadas. Matrices de rotación (1)
• En este tipo de estructuras, tanto las cargas como los elementos pueden adoptar cualquier posición en el espacio tridimensional
• Este tipo de estructuras es el más general que puede presentarse, pudiendo obtener el resto de estructuras (articuladas, planas de nudos rígidos y emparrillados) como un caso particular, colocando ceros en las posiciones correspondientes a los grados de libertad no utilizados
• Para el desarrollo que sigue se van a utilizar las dos hipótesis siguientes:
1. Todas las cargas son puntuales y están aplicadas en nudos, y
2. Todos los nudos son rígidos, excepto los apoyos, que deben ser ideales (desplazamientos o reacciones cero en cualquiera de los grados de libertad. Esto elimina los apoyos elásticos)
• En este tipo de estructuras el número de grados de libertad por nudo es de seis. Así pues, los vectores de fuerzas (desplazamientos) generalizadas serán de seis componentes, tres fuerzas (desplazamientos) y tres momentos (giros).

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012
6 de 27
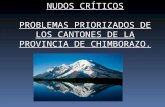
4.2 Sistemas de coordenadas. Matrices de rotación (2)
• Los sistemas de coordenadas, global de la estructura y local de los elementos, son los de la figura
X
Y xi, p1, d1
yi, p2, d2
p6, d6 i
p5, d5
p4, d4
zi, p3, d3
xj, p7, d7
yj, p8, d8
p12, d12 j
p11, d11
p10, d10
zj, p9, d9
Z

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012
7 de 27
4.2 Sistemas de coordenadas. Matrices de rotación (3)
• El sistema de coordenadas local de un elemento se forma del siguiente modo:
1. El eje x tiene la dirección del elemento y su sentido positivo va del nudo i al nudo j. Los cosenos directores del eje x en el sistema de coordenadas global son
2. El eje y se adopta perpendicular a los ejes x y Z, de manera que coincida con el producto vectorial de Z por x
3. Puesto que el sistema de coordenadas debe ser ortogonal y dextrógiro, el eje z se determina con la condición de ortogonalidad
[ ]xZxYxX coscoscos=x [ ]xxx nml=
−−−=
ij
ij
ij
ij
ij
ij
LZZ
LYY
LXX
=∧=
xxx nml100'kji
xZy''
yyy = [ ]yyy nml=
yxz ∧= [ ]zzz nml=

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012
8 de 27
4.2 Sistemas de coordenadas. Matrices de rotación (4)
• La matriz de rotación que pasa del sistema global al local, en el extremo i del elemento ij, es
=
zzz
yyy
xxx
ij
nmlnmlnml
'R
• Puesto que los vectores en ambos sistemas tienen seis componentes, la matriz de transformación deberá ser de 6x6
= '
'
R00R
Rij
ijij

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012
9 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 10 de 27
4.3 Matriz de rigidez elemental en el sistema local (1)
−
−
−
−
−−
−
−
=
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LGJ
LGJ
LEI
LEI
LEI
LEI
LEI
LEI
LEA
LEA
LEI
LEI
LEI
LEI
LGJ
LEI
LEI
LEA
zzzz
yyyy
yyy
zzz
zz
yy
y
z
peij
400060200060
40
6000
20
600
00000000
12000
60
1200
1206000120
00000
400060
40
600
000
SIM.12
00
120
22
22
323
323
2
2
3
3
k
=
pijjpji
pijpjii
peij kk
kkk
• La expresión de la matriz de rigidez del elemento en un sistema de coordenadas cuyos ejes coinciden con los principales de inercia de la sección es

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 11 de 27
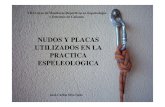
4.3 Matriz de rigidez elemental en el sistema local (2)
• En el caso más general, el eje y local no coincidirá con el principal de inercia de la sección . El giro β entre ambos ejes es el de la figura
yp
zp
z
y
β
• La matriz que pasa del sistema local al sistema de ejes principales de la sección es
( )( )
+−=ββββ
cos90cos090coscos0001
pij'R
=
pij
pij
pij '
'
R00R
R

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 12 de 27
4.3 Matriz de rigidez elemental en el sistema local (3)
• La ecuaciones de comportamiento para un elemento conectado a los nudos i y j, en el sistema de ejes principales de inercia, son
=
pji
pij
pijjpji
pijpjii
pji
pij
dd
kkkk
pp
=
ji
ij
pijpijjp
Tijpijpjip
Tij
pijpijpTijpijp
jiip
Tij
ji
ij
dd
RkRRkRRkRRkR
pp
y en el sistema local
=
ji
ijijjji
ijjii
ji
ij
dd
kkkk
pp

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 13 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 14 de 27
4.4 Matriz de rigidez elemental en el sistema global
• La ecuaciones de comportamiento para un elemento conectado a los nudos i y j son
=
ji
ijijjji
ijjii
ji
ij
dd
kkkk
pp
=
ji
ijijjji
ijjii
ji
ij
DD
KKKK
PP
=
ji
ij
ijijj
Tijijji
Tij
ijijTijij
jii
Tij
ji
ij
DD
RkRRkRRkRRkR
PP
=
ji
ij
ijpijpijjp
Tij
Tijijpijpjip
Tij
Tij
ijpijpijpTij
Tijijpijp
jiip
Tij
Tij
ji
ij
DD
RRkRRRRkRRRRkRRRRkRR
PP

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 15 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 16 de 27
4.5 Ensamblaje de la matriz de rigidez de la estructura
• Las condiciones de equilibrio en el nudo i son
++= imiji PPP ++++= mimimiijiji
jii DKDKDKDK +++= mimjijiii DKDKDK
DKP =
=
m
j
i
mmmjmi
jmjjji
imijii
m
j
i
DDD
KKKKKKKKK
PPP
• La aplicación de las condiciones de compatibilidad en el nudo i supone
iimij DDD ===
• La ecuaciones de comportamiento para los elementos que concurren al nudo i son
jiijijjiiij DKDKP += miimim
miiim DKDKP +=

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 17 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 18 de 27
4.6 Condiciones de contorno
=
I
L
IIIL
LILL
I
L
DD
KKKK
PP
• La matriz de rigidez, K, es singular y no puede invertirse, debido a que la estructura sin las condiciones de apoyo es estáticamente inestable, lo que hace que haya infinitas soluciones al sistema anterior. Aplicando las condiciones de apoyo se llega a una matriz de rigidez no singular
• Si dividimos los grados de libertad en liberados (L) e impuestos (I)

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 19 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 20 de 27
4.7 Cálculo de desplazamientos
ILILLLL DKDKP +=
( )ILILLLL DKPKD −= −1
En el caso particular de que todos los grados de libertad impuestos tengan valor cero
LLLL PKD 1−=

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 21 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 22 de 27
4.8 Cálculo de esfuerzos
jijjijiji
jijijiiij
DKDKPDKDKP
+=+=
jiijji
ijijij
PRpPRp
==
=
j
iijjji
ijjii
ji
ij
DD
KKKK
PP
• El segundo procedimiento consiste

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 23 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 24 de 27
4.9 Cálculo de fuerzas en los nudos
• El segundo procedimiento consiste
∑=
=b
jiji
1PP

4 E
stru
ctur
as e
spac
iale
s de
nudo
s ríg
idos
P. Martínez 2011/2012 25 de 27
Índice
4.1 Introducción 4.2 Sistemas de coordenadas. Matrices de rotación 4.3 Matriz de rigidez elemental en el sistema local 4.4 Matriz de rigidez elemental en el sistema global 4.5 Ensamblaje de la matriz de rigidez de la estructura 4.6 Condiciones de contorno 4.7 Cálculo de desplazamientos 4.8 Cálculo de esfuerzos 4.9 Cálculo de fuerzas en los nudos