







Idiomas
Páginas
Jurídico


ESCUELA POLITÉCNICA NACIONALFACULTAD DE INGENIERÍA ELÉCTRICA
PROGRAMACIÓN Y DESARROLLO SCADA PARA UN SISTEMADE INTELIGENCIA DISTRIBUIDA
JOSÉ ESTRADA BASANTES
TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIEROELÉCTRICO EN LA ESPECIALIZACION DE ELECTRÓNICA Y CONTROL
<A
QUITO, MARZO DE 1998

Certifico que el presente trabajo ha sidoelaborado en su totalidad por el Señor JoséEstrada Basantes .
Ing. BoDtRECfT
sma
A mis padres,esposa e hija
".El principio de lasabiduría es eltemor a Jehova."

ÍNDICE
Pag.INTRODUCCIÓN
1.- ELEMENTOS INICIALES
1.1 CONCEPTOS DE CONTROL GENERALES.... 31.2 DEFINICIONES PRELIMINARES ESPECIFICAS........... 81.3 TÉRMINOS DE PROGRAMACIÓN CYRANO 200..... 10
2.- ARQUITECTURAS DE CONTROL Y ADQUISICIÓN DE DATOS
2.1 DESCRIPCIÓN Y COMPARACIONES BÁSICAS 152.2 ' DIFERENCIAS Y EJEMPLOS DE PROGRAMACIÓN
ENTRE LÓGICA LADDER Y DIAGRAMAS DE FLUJO.. 22
3.- EL SISTEMA DE CONTROL DISTRIBUIDO INTELIGENTEOPTO22
3.1 CONFIGURACIÓN.... 313.2 PROGRAMACIÓN 443.3 OPCIONES DE CONTROL............. 513.4 ESTRUCTURACIÓN DE UN PROGRAMA -
3.4.1 ESPECIFICACIONES Y REQUERIMIENTOS 573.4.2 DISEÑO.. 57
4.- DESARROLLO DE UNA APLICACIÓN MEDIANTE ELCONTROLADOR OPTO 22
4.1.- CONSIDERACIONES4.1.1 DESCRIPCIÓN GENERAL DEL SISTEMA ........ 624.1.2 FUNCIONAMIENTO.... 67
4.2.- PROGRAMACIÓN Y DIAGRAMACION DE RUTINAS4.2.1 HARDWARE... 714.2.2 BASES DE DATOS 784.2.3 RUTINAS DE CONTROL , 96
4.3.- APLICACIÓN DE LA INTERFASE PARAGON TNT 133
5.- CONCLUSIONES Y RECOMENDACIONES 142
6.- ANEXOS
BIBLIOGRAFÍA

INTRODUCCIÓN
La tecnología para controlar procesos ha ido cambiando en complejidad y
adaptándose a las exigencias cada vez mayores de la industria, en cuanto a
confiabilidad y practicidad.
Actualmente es imprescindible tener el conocimiento exacto de como trabajan Sos
equipos de control con tecnología de punta con el propósito de conocer y servirnos de
ellos de forma óptima.
Un sistema de automatización industrial basado en la distribución de unidades
inteligentes de entrada/salida que presenta un nuevo lenguaje de control y una alta
velocidad de procesamiento es el sistema Opto 22
Aplicar una estrategia de control y adquisición de datos basado en un procesador
Opto 22 y servirnos de un paquete de software de interface hombre-máquina en una
determinada industria o instalación presenta ciertas ventajas:
• Nos ayuda a supervisar el funcionamiento de las instalaciones involucradas
• Permite registrar y gestionar todos los estados de funcionamiento, alarmas,
averías, y por ende tomar las medidas correctivas a tiempo
• Puede llegarse a un mando centralizado sobre las diferentes instalaciones, lo que
redunda en una utilización mínima y óptima de personal de planta
• Permite ¡a modificación de los parámetros relevantes sobre procesos en línea con
lo que se logra la explotación óptima de los sistemas en cuanto a consumo y
producción
• Generar informes y estadísticas de la marcha de las instalaciones

Todas estas ventajas vuelven atractivo el uso de arquitecturas de control en cualquier
tipo de instalaciones o industrias, es por esto que vemos necesario presentar un
estudio sobre un sistema de control distribuido inteligente que simplifica grandemente
la complejidad de la automatización.
Se ha escogido como representativo de la arquitectura de control inteligente al sistema
opto 22 porque presenta una nueva y práctica tecnología en cuanto su configuración y
programación.
Mediante esta tesis se pretende cubrir los conceptos de programación necesarios y llegar
a estructurar los lineamientos para el desarrollo de una aplicación en un controlador opto
22.
En el capítulo uno, se introduce los términos y conceptos generales necesarios para
comprender los capítulos siguientes.
Presentar el desarrollo y comparación de las principales arquitecturas de control y
adquisición de datos existentes es materia del capítulo dos.
El capítulo tres describe al sistema de control Opto 22 propuesto, su programación
mediante el lengaje de control Cyrano 200 y la forma de estructurar una solución.
El desarrollo y la programación realizada para una aplicación práctica es presentada
en el capítulo cuatro.
El capítulo cinco describe las conclusiones y recomendaciones obtenidas
En los anexos, capítulo seis, se presentan detalles de costos y gráficos de equipos
utilizados.

1.- ELEMENTOS INICIALES
1.1 CONCEPTOS DE CONTROL GENERALES
ASCII
Código standard americano para intercambio de información. Usado normalmente
cuando códigos de control y alfanuméricos (letras y números decimales ) son
enviados como información a impresoras, modems, etc.
Automatización
Significa añadir inteligencia a un proceso industrial. Ai automatizar un proceso se
disminuye la necesidad de participación de personal, también se provee seguridad y
contabilidad a! proceso.
Los componentes electrónicos programables llamados "controladores " proveen la
inteligencia requerida para la automatización. Un controíador recibe un conjunto de
instrucciones como controlar cada aspecto del proceso.
En general es un programador el que crea un conjunto de instrucciones y los pasa (
download ) al controlador usando un software específico.
El conjunto de instrucciones es almacenado en la memoria del controlador y
posteriormente pueden ser fácilmente modificadas,
Baud
Número de bits transmitidos por segundo (bps) durante una comunicación de datos
serial.

BCC Código de chequeo por bloque
Es un código usado para detectar errores en mensajes de transmisión. Se basa en
una operación lógica de todo el código desde el primero hasta el último carácter y el
resultado es trasladado a dos caracteres ASCII.
Buffer
Un grupo de registros usado para almacenar de forma temporal datos
Estos registros son usados en la transmisión de datos y para trabajar con velocidades
de envío y recepción diferentes.
Comunicación serial
Un método de comunicación en el cual los datos son transmitidos bit por bit.
DCS (.Distributed Control Systems )
Sistemas de Control Distribuido, son tecnologías predeterminadas específicas para
control de procesos que puede integrar una gran cantidad de puntos de E/S y poseen
un alto nivel de sofisticación.
Como ejemplos podemos enunciar el sistema de semaforización de la ciudad de
Quito, sistema de pesajes MOP.
Entradas y salidas analógicas y digitales (I/O)
Un proceso industrial o cualquier tipo de instalaciones que deseamos automatizar,
puede estar integrado de diferentes componentes. Estos se comunican con el
conírolador por medio de puntos o módulos de entrada/salida (I/O).
FSA ( Functional Software Architecture )
Arquitectura de Software Funcional, es un software para automatización industrial que
puede ser comandado desde varios computadoras personales y ofrecer
independencia funcional, física y de información.
Paragon TNT es un programa que presenta estas características.

Full-duplex
Un enlace de comunicación en la cual los datos pueden ser transmitidos y recibidos al
mismo tiempo.
Half-duplex
Un enlace de comunicación en el que !a transmisión está limitada a una sola dirección
a la vez.
Host Port
Es un puerto del controlador utilizado para comunicación con un computador, en el
cual el conírolador es siempre el esclavo es decir no genera preguntas.
Interrupción
El acto de realizar una actividad urgente poniendo en espera o apagando las
actividades en ejecución presentes. Generalmente en un PLC se dispone de una
entrada para realizar interrupciones.
Lógica Ladder (RLL)
Método de programación de la mayoría de controladores programables. Es un
software de programación representado mediante diagramas de alambrado.
Módulo o punto de entrada (inpuí)
Ingresan información desde el proceso al controlador. Ejemplos de dispositivos
considerados como puntos de entrada son pulsadores, conmutadores y sensores. El
controlador toma la información desde los puntos de entrada, procesa usando el
conjunto de instrucciones de software, y retorna información pertinente al proceso.
Esta información es entregada al proceso por medio de los puntos de salida.
Módulo o punto de salida
Reciben información desde el controlador y usan esta información para controlar
diferentes componentes de el proceso. Por ejemplo, luces, motores, válvulas.
Existen dos tipos de puntos de entrada/salida, digitales y análogos.

Módulo o punto digital
Tienen solamente dos valores on - off ( verdadero - falso). Pulsadores y leds son
ejemplos de dispositivos digitales.
Módulo o punto análogo
Tienen un rango de valores. Temperatura y presión son ejemplos de información
análoga.
Módem
Abreviación para moduiador/demodulador. Modula señales digitales y las transmite a
través de una línea telefónica.
Multimaster
Capacidad de algunos controladpres para poder tener varios computadores maestros
al mismo tiempo.
PLC
Abreviación para controlador lógico programable. Es un dispositivo de control el cual
puede ser programado para controlar procesos u operaciones.
RAM
Memoria de acceso aleatorio, provee un medio excelente para crear y alterar un
programa.
ROM
Memoria solamente de lectura. Utilizada generalmente para la programación realizada
desde fábrica.
RS232
Un tipo de comunicación normalizada para transmisión media de datos, su alcance es
menor a 15m. Es el más común de los tipos de comunicación seriales.
6

RS485
Un tipo de comunicación normalizada serial para transmisión de datos, su alcance es
menor a 1200m.
Ruido
Señales eléctricas aleatorias, estas son causadas por ondas de radio o por campos
eléctricos o magnéticos.
Scada ( Supervisor/ Control And Data Acquisition )
Control de supervisión y adquisición de datos.
Tiempo real
En general, tiempo rea! significa que el controlador y el computador usados en un
sistema de control pueden coleccionar datos, realizar cálculos, y tomar acciones
acorde al tiempo presente.
Watchdoq timer
Es un timer que monitorea el tiempo de procesamiento en un controlador
programable, de sobrepasarse este tiempo, se puede comandar una actividad
específica .
7

1.2 DEFINICIONES PRELIMINARES ESPECIFICAS
Controlador Opto 22
Controlador que maneja sistemas de inteligencia distribuida.
Uno de los principales procesadores es el modelo 200 G4LC32; el cual corre los
programas de aplicación que se desarrollan en un computador personal y que han
sido descargados (downloaded) al Controlador .mediante el programa Cyrano 200.
Una vez realizado esto, el computador ya no es necesario, ya que el controlador corre
la aplicación por si solo.
El procesador modelo 200 G4LC32 además de manejar toda la lógica para correr los
programas de aplicación, se comunica con unidades E/S.
Esta comunicación la hace de dos maneras diferentes:
de forma local mediante un bus paralelo y a una velocidad de 1.4 Mhz o de forma
remota sobre un enlace serial RS485 operando hasta 115.2 Kbaudios.
La ventaja de comunicación local con E/S es la velocidad ( 1,4 Mhz); la desventaja es
que las unidades de E/S no pueden estar a mas de 50 metros del controlador
G4LC32. Se pueden colocar como máximo 139 unidades locales de E/S. Se puede
mezclar unidades de E/S análogas o digitales. Cada unidad E/S puede tener hasta 16
puntos E/S ( módulos), así tenemos que un controlador G4LC32 puede manejar 2224
puntos de E/S en el bus local. Si mayores distancias y/o mayor cantidad de puntos de
E/S son requeridos, entonces paneles conteniendo unidades remotas pueden ser
añadidos al sistema.
La ventaja de las unidades de E/S es que se puede distribuir sobre grandes
distancias. El G4LC32 y las unidades E/S remotas pueden estar separadas distancias
.de hasta 3000 pies. La desventaja es la velocidad (115.2 Kbaudios ). El formato de

enlace de comunicación es RS-485. Se dispone de 4 pórticos de comunicación de
este tipo; lo que permite manejar 16000 puntos o módulos I/O de forma remota.
Cada unidad de E/S (I/O) contiene un procesador de 16 bits ( 80C196). Este permite
que la unidad de E/S realice actividades de control por si sola, sin cargar al controlador
principa!. Es por esta razón que su arquitectura se conoce como distribuida inteligente.
Cvrano 200
Es un lenguaje de control visual, y es usado para programar y desarrollar aplicaciones
de control en un sistema Opto 22
Este programa permite escribir aplicaciones de control basado en diagramas de flujo.
Existen tres pasos fundamentales para crear y correr un programa en-Cyrano 200.
1. Desarrollar una aplicación en el configurador
2. Descargar ( download ) la aplicación al controlador y depurarla mediante el módulo
depurador.
3. Correr la aplicación con solamente el controlador conectado.
Paraqon TNT
Paquete de software FSA de INTEC, que sirve para controlar y monitorear procesos
industriales mediante computador y desde interfaces gráficas .
Tiene desarrollados manejadoras para diversos tipos de consoladores entre los
cuales está Opto 22
Este programa será utilizado como interface de usuario a fin de permitir controlar las
aplicaciones que estén corriendo en el procesador modelo 200 G4LC32 .

1.3 TÉRMINOS DE PROGRAMACIÓN CYRANO 200
Diagrama fChart)
Un programa Cyrano esta dividido en diagramas de flujo llamados "chart"
Cada diagrama controla uno o varios aspectos de la aplicación general. Cada
diagrama ( chart) puede tener tres estados; corriendo, suspendido o parado.
Si se encuentra corriendo esta realizando sus actividades asignadas. Un diagrama
suspendido significa que esta temporalmente en pausa. Un diagrama parado significa
que se encuentra inactivo.
Cada diagrama en un programa Cyrano puede cambiar el status de cualquier otro
diagrama en el programa.
Power Up
Cada programa Cyrano tiene un diagrama Power Up. Este es un diagrama que se
inicia automáticamente al ejecutarse el programa en e! controlador. Todos los demás
diagramas deben ser iniciados por programa.
Interrupt
Cada programa Cyrano tiene un diagrama de interrupción. Este es un diagrama que
se encuentra en estado suspendido hasta que una interrupción generada por una
unidad de E/S causa una interrupción.
Multichartinq
Es la capacidad que tiene el controlador modelo 200 G4LC32 para correr algunos
diagramas, cada una realizando diferentes actividades. Un controlador de este tipo
tiene un programa en memoria que le permite correr "simultáneamente" hasta 31
diagramas, asignándole a cada diagrama un tiempo de 500 microsegundos.
10

Solamente cada diagrama que se encuentre corriendo o suspendido es asignado un
tiempo de 500 mícrosegundos.
Dependiendo de la memoria del controlador, se puede escribir hasta 1295 diagramas
lógicos en un único programa, pero solamente 31 diagramas pueden correr a la vez.
Bloques de programación
Existen tres tipos de bloques de programación bajo los cuales se construye un
diagrama lógico (chart)
1. Bloque OPERACIÓN
Contiene las instrucciones que serán ejecutadas en un programa.
Algunas instrucciones o comandos pueden ser colocadas en un bloque de
este tipo. Los bloques de operación pueden tener algunas entradas pero
solamente una salida.
_ . - . _ _ _J
<i',se', / _, '/í ¿ " ,;'''í''/'v *í " '*', —'••• *',
2. Bloque CONDICIÓN
Es un diamante que contiene preguntas que controlan el flujo lógico de un
programa.
11

Los bloques de condición pueden tener algunas entradas, pero solamente dos
salidas: verdadero y falso.
Mas de una pregunta puede ser realizada dentro de un único bloque.
Si todas las preguntas dentro del bloque son evaluadas verdaderas, el
programa continuará por la salida Verdadero.
Si alguna pregunta en el bloque es evaluada falso, el flujo de programa
continuará por la salida Falso
3.- Líneas de Conexión
Son flechas que definen el camino del programa lógico
Block O
Cada diagrama en Cyrano tiene un BLOCK-Q, e! cual señala el inicio lógico del
diagrama. Este bloque puede ser renombrado pero no borrado
12

Clases de Diagramas Lógicos
Existen dos tipos de diagramas (charts):
1. Los que realizan un conjunto de comandos específicos y entonces se paran.
Es decir tienen un inicio ( block-0) y un final. El final de un diagrama de esta clase es
un bloque de condición u operación pero que no tiene salida.
Los diagramas POWER-UP e INTERRUPCIÓN son ejemplos de este tipo de
diagramas; así como las subrutinas.
2. Un diagrama, que necesita correr continuamente debe ser realizado con una
lógica de lazo, lo cual permite que el diagrama no tenga fin.
Ivais y Xvais
Cada punto de entrada y salida para Cyrano tiene un valor externo dado por el
hardware (XVAL) y un valor interno (IVAL) para ei programa.
El valor hardware es el valor medido por el módulo.
El valor interno es el valor que tiene el punto de E/S para ei programa Cyrano que está
corriendo en el controíador.
Variables
Para el programa Cyrano una variable representa información. La información que una
variable representa es llamada el valor de la variable.
El nombre de la variable permanece igual durante la ejecución del programa. Sín
embargo, el valor de una variable puede cambiar.
Hay tres tipos de variables: de punto flotante, entera, y string (.texto).
La diferencia entre ellas es e! tipo de dato que ellas almacenan.
13

Flotantes
Un valor de punto flotante es un valor numérico que contiene un punto decimal, tal
como 3.14.
Enteras
Un valor entero es un número sin parte fraccional; ejemplo: -1
Cadenas de Texto fStrings)
Una variable string almacena texto y cualquier combinación de caracteres ASCII,
incluyendo códigos de control y caracteres extendidos.
Constantes
Una constante es un string o valor numérico que nunca cambia.
Tabtas
Las tablas en Cyrano son arreglos de una sola dimensión; es decir mediante una
variable única se representan algunos valores. Cada valor es referencíado por un
número índice. Las tablas pueden almacenar valores numéricos y también cadenas
de texto.
14

2.- ARQUITECTURAS DE CONTROL Y ADQUISICIÓN DE DATOS
2.1 DESCRIPCIÓN Y COMPARACIONES BÁSICAS
Originalmente, la automatización industrial fue impiementada con relés y
temporizadores, los cuales tenían que ser unidos entre sí mediante conexiones físicas
de alambrado.
El uso de este tipo de estructura de automatización tenía serias desventajas:
• Los sistemas de control compiejos se volvían muy grandes y con demasiados
elementos.
• Para cambiar la función o lógica del sistema de control, el sistema tenía que ser
literalmente re-alambrado. Esto significaba tiempo y por consiguiente una mayor
inversión,
La utilización de PLCs vino a remplazar estos verdaderos bancos de relés.
Un PLC está compuesto de cuatro secciones básicas:
- 1 CPU
- 2 Memoria
- 3 Interface de entrada
- 4 Interface de salida
Verfig. 2.1
15

La CPU controla la operación del PLC incluyendo las E/S acorde al programa.
En las áreas de memoria están almacenados el programa y la información necesaria
del PLC de la siguiente manera:
La memoria para operandos almacena los datos de los pperandos. Los datos para
que maneje el programa y los datos desde y hacia los dispositivos de campo están
centralizados en esta área.
En el área de sistema de registros se almacena las características de como va operar
el PLC.
En la memoria de programa se almacena las instrucciones del programa a ejecutar.
La interíace de entrada recibe ios datos desde los dispositivos de campo y los
transfiere a la memoria de operandos
La interface de salida recibe los datos desde la memoria de operandos y los traslada
hacia los dispositivos de campo.
CONTROLADOS PRDGRAMA3LE
ENTRADA DEDISPOSITIVOS DE CAMPO
FUENTE: DE POTENCIA
®1NTERFACEDEENTRADA
(a)oMEMORIA DEOPERANDOS
1
(T) CPUUHl DAD CENTRALDE PROCESO
1
!>DSISTEMA0rREGISTROS
CDHFPERS
®CRE MOR I ADEPROGRAMA
©1NTERFACLDESALIDA
UTADDRDNAL
SALIDA ADISPOSITIVOS DE CAMPO
FIGURA 2.1 CONFIGURACIÓN BÁSICA DE UN PLC
16
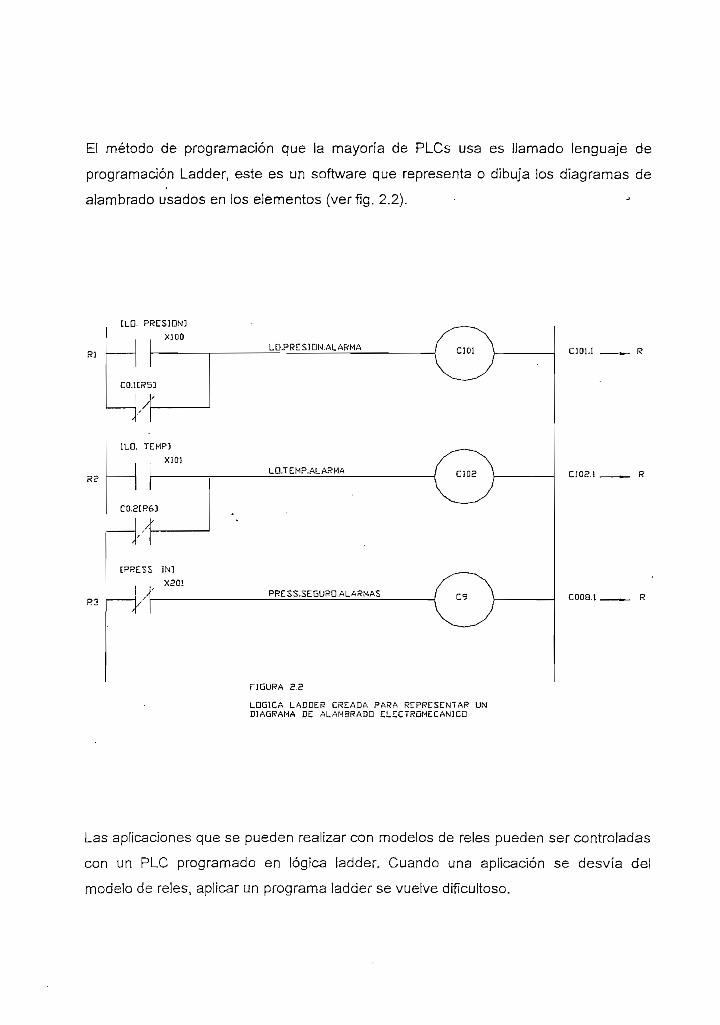
El método de programación que la mayoría de PLCs usa es llamado lenguaje de
programación Ladder, este es un software que representa o dibuja los diagramas de
alambrado usados en los elementos (verfig. 2.2).
P3
ELO. PRESIÓN]
X1DO
LLO. TEMP]
X30J
C0.2[R63
CPRE3S INI
LD.PRESIDN.ALARMA
LD.TEMP.ALARMA
PRESS.SEGURO.AL ARMAS
C101.1
ooe.i
C003.1 .
FIGURA 2.2
LÓGICA LADDER CREADA PARA REPRESENTAR UNDIAGRAMA DE ALAMBRADO ELECTROMECÁNICO
Las aplicaciones que se pueden realizar con modelos de relés pueden ser controladas
con un PLC programado en lógica ladder. Cuando una aplicación se desvía del
modelo de relés, aplicar un programa ladder se vuelve dificultoso.
17

Básicamente, un PLC trabaja monitoreando la totalidad de las entradas, resolviendo la
lógica del programa para después actualizar sus salidas.
Esto implica que el PLC corre un fazo (loop) para chequear cada punto de E/S una y
otra vez.
El proceso de actualizar las entradas, ejecutar el programa, y actualizar las salidas es
conocido como un sean y el proceso de repetir una y otra vez lo mismo es conocido
como método de ejecución cíclico.
Cada fabricante de PLC tiene una gama de controladores, atendiendo sobre todo a la
capacidad en número de las entradas y salidas que puede manejar.
Si el sistema que queremos implementar presenta una arquitectura distribuida, para
cada sitio se debe escoger e! o los PLCs con la capacidad adecuada en cuanto a
número de entradas/salidas.
Ver figura 2.3
ADAPTADORDE COMUNICACIONES
RS485 X, RS485r ~L
i ^
PLC J
'O'-'ER
-• v u
PDB1
PC(OPCIONAL)
/o /o /G
Af\Os/
PLC 2
1JVER
POR!
7
/o /o /o
Ai
\oS/
PLC 3
^VER
_j
POÍ3T
7
/o /í)
A•í
/a /o
VE/S E/S E/S
FIGURA 2.3SISTEMA DISTRIBUIDO MEDIANTE PLC'S
18

Actualmente hay una nueva generación de coníroiadores que ofrecen soluciones
fiables y rentables en la adquisición y control de datos.
Un sistema de esta ciase , toma las señales de campo provenientes de ios diversos
sensores y transmisores, las acondiciona a través de ¡os módulos de entrada, y ¡as
procesa a través de las unidades analógicas y/ o digitales, convirtiendo en
información digital que se envía continuamente hacia el procesador principal a través
de un protocolo de comunicaciones usualmente serial RS 485. Así mismo las
variables procesadas por el controlador principal, son enviadas en formato digital por
el mismo enlace hacia las unidades análogos y/o digitales respectivamente, y
entregadas hacia los diferentes actuadores medíante los módulos de salida.
Estos sistemas presentan una distribución de unidades inteligentes de entrada/salida
(E/S), capaces de realizar por sí solas un conjunto de actividades tales como:
- Conteos
- Mantener eventos
- Medir pulsos
- Medir frecuencias
- Generar trenes de pulsos
- Realizar retardos
- etc
Como resultado el procesador principa! puede realizar e! control lógico con una
admirable velocidad.
Como ejemplos de este tipo de sistemas de control y adquisición de datos podemos
criar:
Sistema Moscad Motorola
Sistema Mistic Opto 22
-* <"ily

El sistema Moscad a pesar de ser un sistema de inteligencia distribuida, su método de
programación básicamente sigue siendo ladder logic; mientras que el sistema de Opto
22 tiene la gran ventaja que su programación es realizada en un formato tipo
diagrama de flujo de características intuitivas.
Por tanto se ha escogido aplicar el sistema de' adquisición de datos de inteligencia
distribuida del sistema Opto 22 basado en sus superiores características
Para comprender de mejor manera las bondades del sistema escogido se realiza una
comparación de PLCs y lógica ladder con el hardware y software Opto 22 .
Una de las diferencias que existen entre los PLCs y Opto 22 se puede expresar de la
siguiente forma, un parámetro crítico para un PLC es su velocidad con la cual
chequea los puntos de E/S, frecuentemente expresada como tiempo de sean por
segundo. Algunos de los PLCs son muy rápidos, pero no necesariamente eficientes.
Un PLC considerado como uno de los más rápidos tiene tiempos de sean del orden de
los milísegundos. Sin embargo en un sistema Opto 22 los puntos de E/S pueden ser
chequeados cuando ellos generen una interrupción ( cuando sea necesario). Por
tanto los tiempos de reacción para sistemas Opto 22 son típicamente medidos en
formatos bajo los milísegundos.
Velocidades de conteo altas o de 20 KHZ, medición de anchos de pulso en el orden
de 100 micro segundos y otras operaciones críticas son funciones estándares para
puntos E/S.
Originalmente los PLCs tuvieron poca o casi ninguna capacidad matemática, hoy en
día sin embargo tienen funciones de operaciones matemáticas limitadas, y si se
requiere funciones matemáticas complejas (ejemplo trabajar en matemática de punto
flotante) es necesario añadir tarjetas que requieren programación en diferentes
lenguajes. Por otro lado en sistema Opto 22 ha sido diseñado usando arquitectura de
32 bits, lo que le permite manejar fácilmente matemáticas enteras y de punto flotante
20

usando una variada librería de funciones matemáticas disponible en e! lenguaje
Cyrano 200.
El manejo de un control PID (proporcional integra! derivativo), es una buena ilustración
de las diferencias entre la arquitectura Opto 22 y PLCs. Algunos PLCs manejan lazos
PID y realizan los cálculos en la CPU del PLC, sin embargo si múltiplos lazos PID son
necesarios, incrementan de manera sustancial el tiempo de procesamiento en el PLC.
En un sistema Opto 22, los lazos PID normalmente no son procesados por el
controlados Estos son hechos en las unidades de E/S y. por tanto el incremento de
estos lazos no declina la capacidad del controlados
También la expansión del sistema frecuentemente puede ser difícil y limitada en un
sistema con PLCs; probablemente sea necesario cambiar todo el entorno de
programación, aún si los PLCs son del mismo vendedor. Esto podría significar un
gasto de tiempo y dinero.
En cambio una solución Opto 22 tiene el carácter de sistema distribuido y modular, lo
que hace que fácilmente sea expandido y su programación se adapte a las
innovaciones.
La diferencia entre PLCs y e! sistema Opto 22 también se puede ver rápidamente
cuando se trata con señales análogas, ya que la ejecución de la lógica y las
instrucciones de conversión y escalamiento de valores análogas manejada en la CPU
de un PLC lo hace lento.
En cuanto a la programación los fabricantes de PLCs han tratado de mejorar la
situación ofreciendo lenguajes más avanzados y basados en conceptos iguales a
diagramas de flujos. Pero los diagramas de flujo no se ajustan totalmente con las
PLCs; estos lenguajes son compilados generalmente en lógica ladder, de esta
manera aunque el programa pueda ser ahora fácilmente escrito hay todavía
limitaciones funcionales, porque el hardware fue diseñado para correr lógica ladder
21

Para añadir características tales como capacidad de comunicación ASCII, o funciones
matemáticas complejas a la lógica ladder, un entorno completamente diferente en
cuanto a hardware y programación ha tenido que ser implementado e integrado para
soportar funciones que la lógica ladder no puede realizar. Por tanto se tiene la
documentación separada de dos o mas programas para un solo sistema, lo que lo
hace mucho mas complejo y difícil de entender.
En contraste, el entorno de programación Opto 22 es una interface gráfica, pro vista por
Microsoft Windows en una plataforma 32 bits que presenta de forma clara y concisa la
representación de la totalidad de la solución de control dentro de un único documento.
Una fundamental ventaja de la programación en Cyrano 200 es la readaptabilidad, lo
que permite reutilizar los mismos diagramas solución para proyectos completamente
diferentes.
2.2 DIFERENCIAS Y EJEMPLOS DE PROGRAMACIÓN ENTRE
LÓGICA LADDER (RLL) Y DIAGRAMAS DE FLUJO
Un programa de control en cualquier lenguaje es simplemente una serie de preguntas
y comandos; sin embargo la manera como RLL y Cyrano permiten al programador
organizar estas preguntas e instrucciones difiere radicalmente.
En RLL una operación de pregunta/comando esta representada en un nivel. E! lado
izquierdo del nivel mira por una condición específica y el lado derecho realiza la acción
requerida. Los programas son ensamblados creando algunos de estos niveles y
organizándolos para que se ejecuten en la apropiada secuencia.; esto requiere que el
programador piense en el proceso de control en una forma paralela, ya que debe
recordar las preguntas que han sido hechas con cada corrida del programa.
En Cyrano todas las instrucciones operan en modo inmediato y solamente los datos
requeridos en un punto determinado son accesados; es decir cuando el procesador es
instruido de mirar si un conmutador está cerrado ( On ), inmediatamente lee la entrada
y realiza la operación de salida.
22

Una de las primeras diferencias entre RLL y Cyrano es la manera como los datos
están organizados y son accesados. RLL segmenta la información del programa en
archivos en memoria y para cada tipo de archivo tienen una función específica. La
dirección es entonces usada para obtener un dato específico dentro de cada archivo.
La dirección es una combinación del tipo de archivo y de la localización del registro
dentro del archivo.
Por ejemplo Alien Brandley usa el siguiente convenio para direccionar sus PLCs:
F8:100 significa archivo F8 (archivo de punto flotante) el registro 100. Todos los datos
del programa son entonces manipulados especificando la dirección del archivo y del
ítem.
Mientras que Cyrano permite ai usuario proveer una etiqueta descriptiva para todos
los datos, y todo acceso a cualquier variable es realizada por la referencia a dicha
etiqueta.
Las entradas digitales y ios registros internos en RLL son usados como bits de control
y son colocados en el iado izquierdo de cada nivel y evaluados con el símbolo de
contacto abierto -II- (leído como examinar si está cerrado) y e! símbolo de contacto
cerrado -I/I- (leído examinar si está abierto). En el lado derecho de un nivel son
colocadas bobinas que son ejecutadas solamente si las entradas lógicas del lado
izquierdo de! nivel son verdaderas.
En Cyrano el estado de las entradas es evaluado usando un bloque condición con la
instrucción On? u Off ?. El control de las salidas está relacionado con el uso de un
bloque de proceso con los comandos Turn On o Tum Off. El estado de cualquier
salida es mantenido hasta que una instrucción de cambio sea ejecutada.
Las entradas y salidas análogas son manejadas de la misma manera en ambos
• sistemas. Si una información análoga es almacenada en memoria o transferida hacia
una salida la instrucción move es usada.
23

Un laích en RLL es una función de salida; es usada para retener salidas digitales y
registros internos. Las salidas mantienen su estado hasta que una instrucción de
cambio sea usada.
Los laten en Cyrano son funciones de entrada de hardware ejecutadas por la
unidades inteligentes de E/S. Son usados para sensar señales de alta velocidad. Si
un latch está habilitado, se leerá falso hasta que vea una transición; una vez que la
entrada vea un pulso, leerá verdadero hasta que sea limpiado.
TEMPORIZADORES Y RETARDOS.-
Los temporizadores son usados para medir períodos de tiempo entre dos eventos.
En RLL ios temporizadores son usados para proveer pausas entre pasos lógicos.
Cyrano provee temporizadores y también un comando de retardo (Delay) para pausas
lógicas, el cual es más eficiente que un temporizador.
En RLL los temporizadores son ¡mplementados como instrucciones y típicamente
trabajan contando desde cero hasta un valor definido por un usuario, son tratados
como dispositivos de salida y por lo tanto colocadas en el lado derecho de un nivel.
La configuración ofrece dos parámetros a setear: el tiempo base y el número a contar
(preset); siendo la duración del temporizador igual al tiempo base por el preset.
Su inicio es realizado tan pronto la circuitería que está colocada en su entrada star!
(inicio) se evalúe como verdadero.
Mientras un temporizador este trabajando hay típicamente dos parámetros que se
utilizan: temporizador finalizado y el acumulador, este último sirve para chequear el
número de conteos. Algunos temporizadores también tienen una instrucción que
permite encerar el acumulador durante su ejecución.
24
Los temporizadores en Cyrano son un tipo especia! de variables numéricas y trabajan
moviendo un número (flotante o entero ) dentro de ellos.
El temporizador inicia el conteo hacía abajo desde dicho número y se para cuando
alcanza el valor de cero.
Su creación se realiza seleccionando la variable timer desde una lista. La resolución
de un temporizador es de un milisegundo y su rango es entre 0,001 a 4.611686x
10exp,15-segundos.
Su inicio es automático en el momento que se utiliza el comando move para colocar el
tiempo deseado en la variable timer.
Cualquier comando que haga referencia a variables numéricas puede ser usado para
examinar o manipular temporizadores.
El comando condición Timer Expirado? es usado para determinar cuando el
temporizador ha finalizado.
El comando Delay es usado en lugar de un temporizador para provocar pausas
específicas entre pasos lógicos . Este comando es mas eficiente y simple de
implementarque un temporizador.
A continuación se muestra una aplicación simple que requiere un retardo de 3
segundos después que una entrada sea cerrada.
Ver figura 2.4
25

Rl
Switch InicioI'O.O
Poso 1Mirar s¡ loentrodo esiocerrado
T 4=3
Poso 3Inicio íenporizotíor de 3s
DNPoso 3Hror s¡ el bit deltenporizotíor se hohecho verdadero
LÓGICA LADDCP
Poso 4Encender lo lonporo desolido 1
JsDn?
Swrtch. Inicio
Deloy CSec.)
Turn Dn3.0
Lonporo,!
CYRAND 300
FIGURA 2.4PROGRAMACIÓN DE UN RETARDO
26
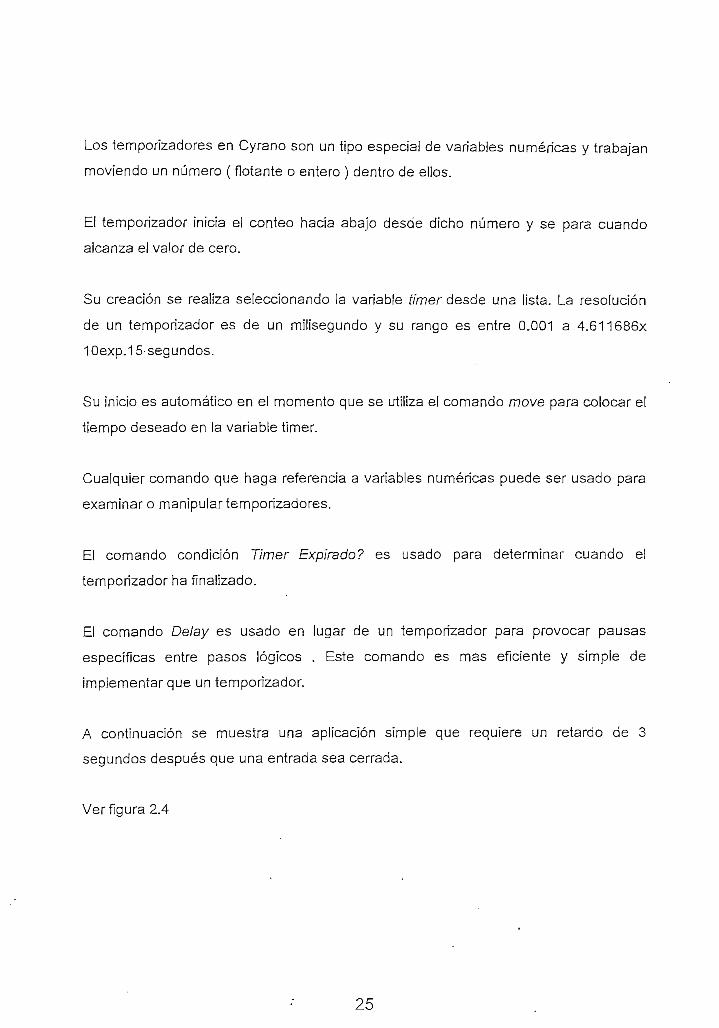
En el siguiente ejemplo se presentan las diferencias de programación en el uso de
temporízadores para medir el tiempo entre dos eventos.
Ver figura 2.5
PC'
R]
Test
|
1
TestB3
2
Poso 1Mirar si la
Inicio .entrodo esto,^ cerrado
Poso 3Mirar si lo
Completo ervtrodo es"to
LDC
i Poso 2i Inicio teripori;
Tiner Dr. Délo yTiner 74^4Tiner Bose o.OOlPr?set 1000Accun o
odor de 3s
°V
POSO 4Mover el tienpo tí?'ocunul&dor c uno variable
Mnv /
Source T4'4 AccX X X
SICA LADDEF
/
CYRAND 200
100001¡ner
Substroctsoooo
Minus T¡nerPut Result ]fi lienpo
FIGURA H.5PROGRAMACIÓN DE UNA MEDICIÓN ENTRE EVENTOS
27

CONTADORES
Típicamente los contadores vienen en dos tipos: Contadores ascendentes (Count Up )
y contadores descendentes ( Couní Down ).
En la lógica RLL ios contadores son tratados como salidas y por lo tanto colocados en
el lado derecho de un nivel. Típicamente tienen un solo parámetro a configurar:
Preset, que es el número de conteos a alcanzar antes de operar el bit de conteo
realizado.
Hay cuatro parámetros que se pueden utilizar en un contador cuando está activado:
1. Bit de conteo realizado, es verdadero cuando e! valor de Preset ha sido alcanzado.
2. Bit de habilitación, para activar o desactivar el conteo
3. Bit para indicar si el acumulador ha alcanzado los límites positivos o negativos de
conteo.
4. Acumulador, es un registro que mantiene el número actual de conteo.
Algunos contadores tienen un limpiador de conteo que puede actuar durante su
ejecución.
Un contador ascendente, inicia con e! acumulador en cero, y por cada transición, el
acumulador es incrementado en uno; sí el acumulador alcanza el valor del preset, el
bit de conteo es activado.
Un contador descendente, inicia moviendo el dato del preset hacia el acumulador, y
por cada transición, el acumulador es decrementado en uno, cuando el acumulador
alcanza cero, el bit de conteo es activado.
28

Los contadores en Cyrano 200, son realizados en las unidades de E/S. inician desde
cero y cuentan hacia arriba.
Son creados seleccionando el comando Counter desde el listado de comandos como
característica del módulo de entrada digital.
Los comandos que manipulan un contador son:
1. Start Counter, inicia e! conteo sin ningún conteo acumulado
2. Stop Counter, para el conteo
3. Get Counter, mueve el conteo acumulado actúa! a una variable
4. Ciear Counter, encera el contador, sin pararlo
5. Gef and Clear Counter, mueve el acumulado actual a una variable y limpia el
contador.
Adicionalmente un contador puede ser accesado directamente por los comandos que
manejan variables y E/S, pudiendo por ejemplo examinarse con el comando condición
Equal? (Igual).
El ejemplo siguiente muestra las dos programaciones ( RLL y Cyrano) para disponer
de una salida que debe encenderse después que un pulsador haya sido presionado
10 veces.
Ver figura 2.6
29

R2
a i .j r _-,,~Pulsodorj:o«eo
Poso 1x Miror si lo
entrado esio
C 50
Paso 2Inicio corvteo de 10 pulsos
Poso 3M;ror s¡ el bit deconieo "terninodo se hohecho verdadera
LDG1CA LADDER
Encender LanparoDO .2
Poso 4Encender lo lonporo desolido 2
Sxort CounterDn Point PuisodorJ
]sEquolllo
Pulsodor_l
Turn DnLonporo_2
CYRAND 200
FIGURA 2.6PROGRAMACIÓN DE UN CONTADOR
30

3.- EL SISTEMA DE CONTROL DISTRIBUIDO INTELIGENTE OPTO22
3.1 CONFIGURACIÓN
El sistema de control Opto 22 se basa en un controlador G4LC32 de arquitectura de
32 bits, 512K bytes de memoria RAM ( expandible a 4M bytes) respaldada por
batería. Un megabyte de memoria ROM.
El microprocesador que utiliza es un 68020 de Motorola operando de forma paralela
con un coprocesador de matemática de punto flotante e] 68881.
La figura 3.1 presenta un diagrama de bloques del procesador G4LC32
CÜM O
CnPPOCESADOPMATEMÁTICO66381
18 LEI'3INDICADORESDE ESTADO
DISPLAV4LINEAC20CARACTERES
25 TECLA;
CPU
CONTROL DEENCENDIDO YRESET
bcUciU16 MHz
it
MEMORIA RAMRESPALDADAPOR BATERÍASHASTA 4MB
RELOJ DETIEMPOREAL
i
LiríCuITD L1L
EXAMINACIDNDE BATERÍAS
BATERÍA
ROMEXPANDIBLEHASTA IMS
FIGURA 3.1DIAGRAMA DE BLOQUES DEL PROCESADOR G4LC32
31

Algunas de las características mas importantes de este procesador son:
Velocidad de operación de 16.67 Mhz
Posee cuatro pórticos seriales, cuya velocidad de comunicación puede ser de
hasta 115K bytes
Tiene un puerto tipo Arcnet, para comunicación entre consoladores a una
velocidad de 2.5 Mhz.
En su cara frontal posee un display de cristal iíquido de 4 líneas y un
conjunto de leds indicadores para diagnóstico sobre comunicaciones, E/S
y estado de programación.
Posee un reloj en tiempo real
Tiene la capacidad de controlar hasta 31 diagramas de usuario de forma
simultánea.
Controla hasta 2224 puntos de forma local y 4096 puntos por puerto de
forma remota.
Su programación se lo realiza mediante un computador y el lenguaje de
programación visual Cyrano 200.
UNIDADES DE ENTRADA/SALIDA
Para formar un sistema de control distribuido el procesador G4LC32 tiene que
comunicarse con terminales remotos, los cuales son una familia de unidades
inteligentes digitales y/o análogas que operan como esclavos.
Estas unidades de E/S por sí mismo tienen inteligencia, en su parte central están
formadas por un procesador Motorola 80C196 que le da a las unidades digitales de
32

E/S la capacidad de ejecutar de forma independiente lógicas tales como : conteos,
latching, generar pulsos.
Una unidad de entrada/salida digital se conoce con el nombre de G4D16R si es
remota y G4D16L si es local.
En cada unidad digital o análoga de E/S remota, mediante puentes (jumper), es
necesario seleccionar su dirección ( que debe ser única ), la velocidad de transmisión,
el protocolo de transmisión de datos (Binario o ASCII) y el código de chequeo de error
(CRC)
En cada unidad de E/S digital, caben 16 módulos o puntos digitales individuales,
aislados de forma óptica; estos se ínterconectan al campo y le dan al sistema un
aislamiento de 4000 voltios RMS.
Estos puntos digitales van de acuerdo ai tipo de entrada o salida que se requiera,
entre los principales tenemos;
MÓDULOS DE ENTRADA PC
MODULO RANGO DE ENTRADA
G4IDC5 10a32VDC
G4IDC5B 4a16VDC
G4IDC5K 2.5a16VDC
G41DC5D 2.5 a 28 VDC
G4IDC5G 35 a 60 VDC
33

G4IAC5 90a 140 VDC
G41AC5A 180a280 VDC
BASE DE MONTAJEípor-íe de lo Unidad cíe E/S)
MODULO DIGITAL
Conectan hociola -torjeio cíelo unidod de E/S
s0
VACO
VDC
•^ Vcc
SolidoLógico
GNDLógico
ni i
~iConecTores
' '
\
•
— I
FIGURA 3.3
Terninoles*plug-(fi'
DIAGRAMA ESQUEMÁTICO DE UN MODULO BE ENTRADADJGITAL
MÓDULOS DE SALIDA DC
MODULO RANGO DE SALIDA
G4ODC5 5 a 60 VDC
G4ODC5A 5 a 200 VDC
G4ODC5R Salida de contacto de relé
G4ODC5R5 Salida de contacto de relé NC
34

BASE DE MONTAJECparte de lo Unidod de C/S)
MODULO DIGITAL
Conecion desdelo torito delo urtictooi de E/S
Vcc
EntradoLopíco
ni iTerninalesde tornillo
n! 1
4.7KX
Conectares
{
FIGURA 3.3
T?rninol=s
DIAGRAMA ESQUEMÁTICO DE UN MODULO DE SALIDADIGITAL
MÓDULOS DE ENTRADA AC
MODULO RANGO DE ENTRADA
G4IDC5 10a32VAC
G4IDC5G 35 a 60 VAC
G4IAC5 90a 140 VAC
35

G4IAC5A 180 a 280 VAC
Ver figura anterior 3.2
MÓDULOS DE SALIDA AC
MODULO RANGO DE SALIDA
G4OAC5 12a 140 VAC
G4OAC5A 24 a 280 VAC
BASE DE MONTAJE(porte1 de lo Un-dod de E/S>
MODULO DIGITAL
Conectan desdelo tárjete delo unidad de E/S
Vcc
EntradaLógico
ni i7er nínalesde tornillo
ni i
4.7K <[
Conectares
{
(
FJGURA 3.4
Terrenales'plug-ín*
DIAGRAMA ESQUEMÁTICO DE UN MODULO DE SALIDA ACDIGITAL
Cualquier combinación de módulos digitales es permitada sobre una unidad digital,
hasta completarlas 16 posiciones.
36

Las fig. 3.5 y 3.6 muestra ejemplos de conexiones de campo típicas para algunos
módulos digitales.
CONEXIÓN DE LA SEÑAL ASENSAR PARA UN MODULOEN LA POSICIÓN O
VOLTAJE DC
CONEXIÓN DE LA SEÑAL ASENSAR PARA UN MODULOEN LA POSICIÓN 7
VOLTAJE AC
BASE DE LA UNIDAD DE E/S
POSICIÓNDEL MODULO
FIGURA 3.5CONEXIONES DE CAMPO PARA SEÑALES DE ENTRADA AC-DC
37

CONEXIÓN DE LA CARGAPARA UN MODULOEN LA POSICIÓN O
FuenteDC
CONEXIÓN DE LA CARGAPARA UN HDDULDEN LA POSICIÓN 6
BASE DE LA UNIDAD DE E/S
2 1 ]()
i Í4 3 ] ]
i Í6 5 ] s
1Í8 7 J3
i i 10 9 ] 4
I i 12 11 ] 5
.POSICIÓNDEL MODULO
FIGURA 3.6CONEXIONES DE CAMPO PARA SEÑALES DE SALIDA AC-DC
38

Las unidades de E/S análogas pueden realizar las siguientes funciones ,
independiente del procesador central:
-control de lazo P1D
-Monítoreo de límites
-Linealización de termocuplas
-Cálculos de promedios
-Generar rampas y formas de onda
-Generar watchdog
-Suministrar fuentes de corriente para sensores análogos
Una unidad de entrada/salida análoga se conoce'con el nombre de G4A8R si es
remota y G4A8L sí es local.
En cada unidad de E/S análoga, caben 8 módulos o puntos análogos individuales,
aislados de forma óptica; estos se ¡nterconectan al campo y le dan al sistema un
aislamiento de 4000 voltios RMS.
Estos puntos analógicos son escogidos de acuerdo al tipo de sensor o actuador que
se disponga, entre los principales tenemos:
MÓDULOS DE ENTRADA ANÁLOGOS
Estos módulos permiten tomar la señal desde el sensor repectivo y la convierten en
señal digital de frecuencia
39

MODULO
G4AD3
RANGO DE ENTRADA
4 a 20 mA
G4AD16 O a S A M P AC/DC
G4AD4 O a 10 ICTDTEMP
G4AD5 TERMOCUPLA J
G4AD8 TERMOCUPLA K
G4AD17 TERMOCUPLA R
G4AD18 TERMOCUPLA T
G4AD19 TERMOCUPLA E
G4AD23 TERMOCUPLA S
G4AD10 RTD 100 OHMIOS
G4AD9 O a 50 mV
G4AD13 O a 100 mV
G4AD6 O a 5 VDC
G4AD7 O a 10 VDC
G4AD11 -5 a 5 VDC
G4AD12 -10 a 10 VDC
40

MODULO RANGO DE SALIDA
G4DA3 4 a 20 mA
G4DA8 O a 20 mA
G4DA4 O a 5 VDC
G4DA5 O a 10 VDC
G4DA6 -5 a 5 VDC
G4DA7 -10 a 10 VDC
Sobre una unidad análoga cualquier combinación de módulos puede ser usada hasta
llegara 8.
En la figura 3,7 y 3.8 se presentan algunas conexiones de campo utilizadas en
unidades de E/S análogas.
41

CONEXIÓN DEL SENSORPARA UN MODULOEN LA POSICIÓN OFuente suninístroda por elnodulo.
CONEXIÓN DEL SENSORPARA UN MODULOEN LA POSICIÓN 3Fuente propio
BASE DE LA UNIDAD DE E/S
PDSICIDNDEL MDDULD
CONEXIÓN DEL SENSORPARA UN MODULO G4AD16EN LA POSICIÓN
FIGURA 3.7
42

CONEXIÓN DEL RECEPTOR
PARA UN MODULOEN LA POSICIÓN OFuente suministrada por elnodulo.
Receptor
Receptor
CONEXIÓN DEL RECEPTORPARA UN MODULOEN LA POSICIÓN 3Fuente propia
BASE DE LA UNIDAD DE E/S
PGSICIDNDEL MGDULG
FIGURA 3.8CDNEXIDNES DE MDDULDS DE SALIDA DECORRIENTE
43

3.2 PROGRAMACIÓN
El procesador Opto 22 G4LC32 y las unidades de E/S han sido diseñadas para ser
usadas con el lenguaje de control visual Cyrano 200. En este programa se desarrolla
toda la estrategia de control, se realiza la depuración respectiva y se descarga al
controlador.
La estrategia de control se realiza fácilmente realizando selecciones desde el menú
del programa y utilizando el mouse para dibujar las ¡nterconecciones que dirigen el
flujo de control en los diagramas.
Al ingresar al programa Cyrano 200 existe un menú de barra que incluye tres
opciones: Cyrano, Toofs, y System] cada menú incluye algunas opciones mas.
El menú Cyrano incluye las opciones siguientes:
Configurador Que es el módulo en el cual los programas son
escritos y editados
Debugger Es el módulo que compila el programa y lo descarga al
procesador. Desde aquí se puede monitorear,
examinar, modificar puntos y variables en línea. Se
permite correr el programa paso a paso etc.
On une Es un módulo que permite realizar cambios en el
programa después de que este corriendo sobre el
procesador sin tener que parar el proceso
El menú Too/s
Lista algunas de las herramientas y utilitarios disponibles dentro del programa,
ejemplo:
44

-Permite iniciafizar variables antes de que corra el programa
-Realiza respaldos y recuperaciones de programa
-Convierte diagramas a formatos .DXF compatibles con programas CAD.
-Genera listados de materiales de los equipos que se estén utilizando.
El menú System
Habilita o dehabilita comandos que son requeridos para aplicaciones específicas de
control de movimiento.
CONFIGURADOR
Al ingresar a la pantalla del Configurador se presenta una barra de menús y una barra
de herramientas. Ver figura 3.9
Los menús son accesados utilizando el mouse y/o teclado. Las herramientas son
aplicadas seleccionando una a la vez con el mouse; estas nos sirven para crear
cualquier programa o subrutina. Ejemplo, si escogemos OPERATION, es posible
colocar un bloque rectangular que será parte del programa.
Configure Charts Systen Frint
SaueUersionQuit
BARRA DE HENU OPERftTIOH
CONDITION
COKHECT
DETftIL
NfiHE
CUT
CDPV
PASTE
HOUE
RESIZE
COLOR
TEXT
ZOOM-IN
ZOOM-OUT
PftH
n: 8Í62K PftOGRftfl: TESIS CHART: POUERUP
FIGURA 3.9
ZOOtí: 1.000 'SHA? OH
MODULO CONFIGURADOR
45

Para crear o cargar un nuevo programa será necesario seleccionar Load del menú
File y proceder como en cualquier programa de Windows.
Una vez escogido el nombre del programa es buena práctica empezar configurando el
conírolador a utilizar, para esto se ingresará mediante los menús Configure - Mistic a
la caja de diálogo de la figura 3.10 .
Se teclea el nombre del controlador, escogemos mediante las teclas de flecha izq.-der,
el tipo de controlador y el modo de comunicación con las unidades de E/S ( Binario -
ASCII ). Los demás parámetros son escogidos de acuerdo a la comunicación entre el
controlador y el computador.
File .-Configure Charts Systen. Print
CONFIGURE fllSTIC COHHUíUCATIONS
IBLDCK-O I QPERATIQN
CONDITION
CONNECT
DETAIL
NAhE
N f i M E PROGBñMft CONTROL EPNTlfPE G4LC32 COM MODE BINñRYñDDRESS 801 Cl-255) ' ' COPY
PC COM Part Conf iífuratlon ! PftSTEPORT COM2 BASE ADDR. 2F8 IRQ 03BAUD 115200 MOUECTS DISfiBLEDREm 2 Cl-9) • • RESIZET I M E O U T 1.00 < S c c . )
COLORCANCEL
TEXT
ZOOM-IN
ZOOM-OUT
PftN
hEfl: 81Ó2K PRDSEÍAtt: TESIS CHñRT: POUERUP ZOOh: 1.000 SNñP OFF
FIGURA 3.10 CONFIGURACIÓN DE COMUNICACIONES
46

La configuración de las unidades de E/S, puntos de E/S y variables, se puede realizar
de dos diferentes maneras; todos a la vez o según se vayan necesitando. De esta
última manera el programa ingresará a una caja de diálogo que solícita que se defina
tal E/S o variable.
La figura 3.11 presenta la forma como se configura una unidad digital.
Se ingresa el nombre deseado, seleccionamos el tipo de unidad; digital o análogo y el
pórtico del controlador al cual la unidad está conectada (remoto 0 ,1 ,2 ,3o local).
La dirección debe coincidir con la seleccionada físicamente mediante los puentes (
jumpers ) sobre cada unidad. De requerirlo se escoge el tiempo de watchdog.
El nivel de seguridad permite que un operador con un nivel de seguridad mayor pueda
mirar y cambiar parámetros de la unidad desde el panel frontal del procesador.
La opción de habilitación de la unidad se la puede realizar por defecto o por programa;
en todo caso sí la unidad no se encuentra habilitada la estrategia de control trabaja
con los valores IVAL.
Configure Charts Systen •-,.- Print
DPERATION
CURRENT I/D UNITS)ITION
ÑAME TVPE
ADD I/O UNIT
ÑAME DÍGITAL_UNO_CENTRO_DE_CONTROLTVPE D I G I T A L MFPORT REMÓTE 1fiDDRESS 001 (0-255)WATCHDOG 10 SECSECURITV 0ENABLE ¥ES
PORT ADDRESS
AIL
JT
PY
ETE
UE
IZE
COLOR
TEXT
ZOOM-IN
ZOOM-OUT
PAN
retí: 8162K PROGRAH: TESIS CHfiRT: POUESUP ZOOrt: 1.000 SNftP OFF
FIGURA 3.11 CONFIGURACIÓN DE UNA UNIDAD DIGITAL
47
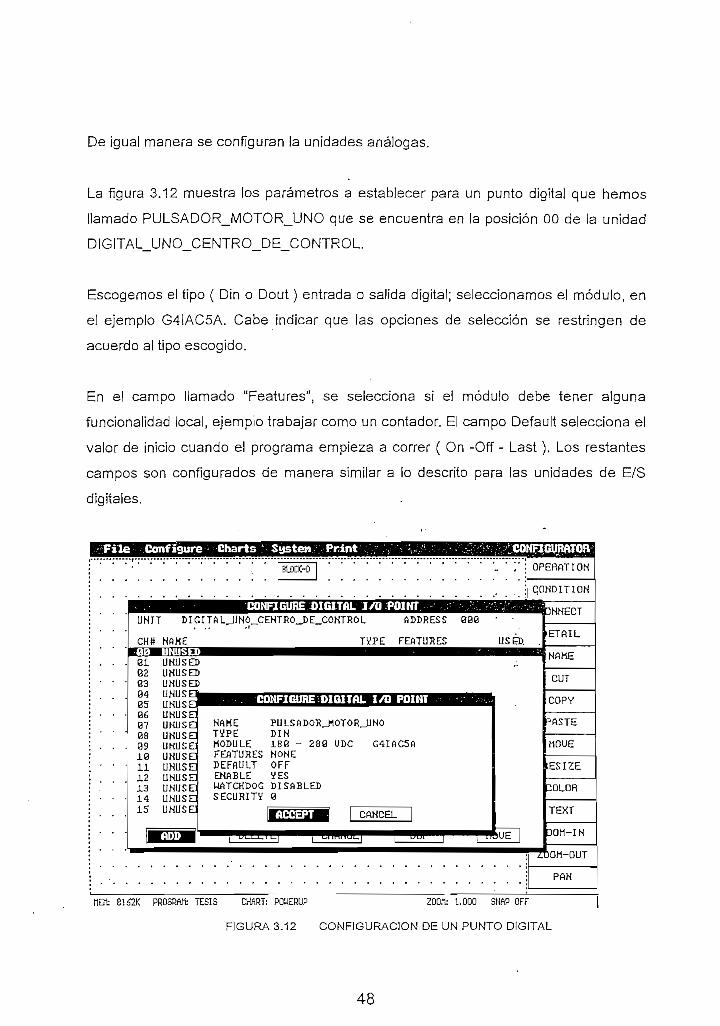
De igual manera se configuran la unidades análogas.
La figura 3.12 muestra los parámetros a establecer para un punto digital que hemos
llamado PULSADOR_MOTOR_UNO que se encuentra en la posición 00 de la unidad
DIGlTAL_UNO_CENTRO_DE_CONÍTROL.
Escogemos el tipo ( Din o Dout) entrada o salida digital; seleccionamos e! módulo, en
el ejemplo G41AC5A. Cabe indicar que las opciones de selección se restringen de
acuerdo a! tipo escogido.
En el campo llamado "Features", se selecciona si el módulo debe tener alguna
funcionalidad local, ejemplo trabajar como un contador. El campo Defaulí selecciona el
valor de inicio cuando el programa empieza a correr ( On -Off - Last). Los restantes
campos son configurados de manera similar a lo descrito para las unidades de E/S
digitales.
.v;File Configure Charts : Systen Print ; \'^¿?:¿^-\->--¿$'#;ü&^^
IBLDCK-D 1 - .
. !
^^H CONFIGURE DIGITAL I/O POIHT . ; / >;••• :..*•'>.,•.
•
UNIT DIC
CHít ÑAME
OPERftTION
CONDITION
ÍITALJJNO CENTRO_DE CONTROL ADURESS 00Q ' '-i
ea UNUSED01 UNUSED62 UNUSED03 UNUSED
06 UNUSE07 UNUSE08 UNUSE09 UNUSB10 UNUSE11 UNUSE12 UNUSE13 UNUSE14 UNUSE15 UNUSE:
TVPE FEATURES USÉD. ..- • • . • •
••
CONFIGURE DIGIIÍU. I/D POINT • • . -
NñME PULSADOR_MOTORJJNOT^PE DINMODULE 180 - 280 UDC G4IAC5AFEATURES NONEDEFAULT OFFENABLE VESWATCHDOG DISABLEDSECURITV 0
KE2SB• i'TM t HLrLí-.lLJ i Llini!L
CANCEL
^i t
'ETftlL
¿_
CUT
COPY
^ASTE
MOUE
.ESIZE
30LOR
TEXT
boM-QUT
PAN
HQ1: 8152K PROGRñrt: TESIS CHfiRT; PÜUERUP 200f1: 1.000 SHfiP OFF
FIGURA 3.12 CONFIGURACIÓN DE UN PUNTO DIGITAL
48

Para un punto o módulo análogo, ver figura 3.13, se tienen que especificar los
siguientes parámetros;
Nombre, identifica al punto análogo en eí programa, hasta 30 caracteres son
permitidos. Para el ejemplo SENSOR_DE_NIVEL_1
Tipo, Las opciones son AIN ( entrada analógica ) o AOUT ( salida análoga)
Módulo, Este campo es usado principalmente para notificar a la unidad de E/S, que
tipo de módulo está instalado en cada posición o canal. Para entradas de corriente o
voltaje uno puede seleccionar de forma general ANALOG INPUT y tiene accesibilidad
a los campos siguientes Unidades (UNITS), valor escala mínima (LO SCALE), valor
escala máxima (Hl SCALE); esto permite una Idealización de la entrada análoga.
Los restantes parámetros DEFAULT, ENABLE, WATCHDOG y SECURITY se
establecen de'manera similar a lo descrito para los puntos digitales.
.File - Configure .Charts >*Systeiv'; P» int CONFIGURATOR
OPERATIQN
CONDITION
CONFIGURE ANALOG I/O POINT
UNIT ftNALOGO_DOS_CENTRO_PE_CONTROL ADDRESS 882
CH# Ñ A M E T¥PE UNITS00 SENSOR_PE_MONOXIDO ñ I N PPM01 U f l R I f t D O R DE VELOCIDAD AOUT RPM
DNNECT
USED0101
02 SENSOR T)F NIUFI 1 . AIN CFNTIHFTROCONFIGURE ftNALOG I /O POINT . . - ;03
040536070809101112131415
LWUSEDUNUSEDUNUSEDUNUSEDUNUSEDUNUSEPUNUSEDUNUSEDUNUSEDUNUSEDUNUSEDUNUSEDUNUSED
ftDD
NfiMETVPEMODULEUNITSLO SCfiLEHI SCfiLEDEFfiULTENABLEWATCHDOGSECURITV
filNftNALOG INPUTCENTÍMETRO0.0000195.0000NO 8.0880VESDISABLED0
ACCEPT CftNCEL
ETAIL
ÑAME
CUT
CDPY
MOUE
¡OLOR
TEXT
30M-IN
PAN
UBI: 8390K PR06RAÍ1: TESIS CHñRT: DIfiGRñí1ñ_DE_COtfTROL_HORARIO ZOOtl: 0.500 SHñP OH
FIGURA 3.13 CONFIGURACIÓN DE UN MODULO ANÁLOGO
49
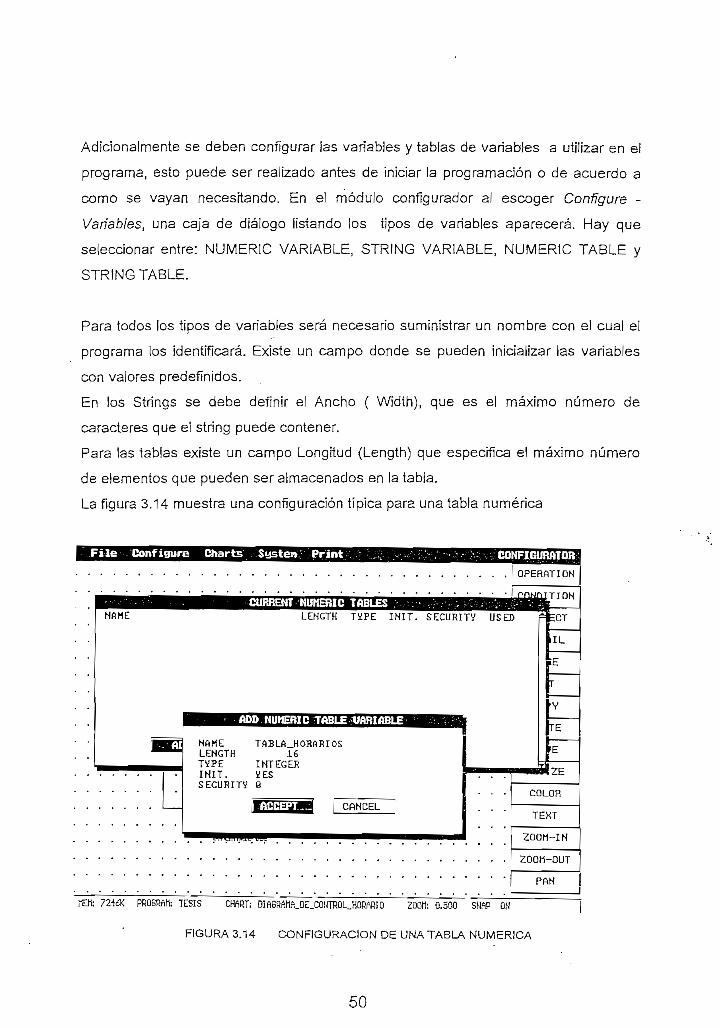
Adicionaimente se deben configurar las variables y tablas de variables a utilizar en el
programa, esto puede ser realizado antes de iniciar la programación o de acuerdo a
como se vayan necesitando. En el módulo configurador al escoger Configure -
Variables, una caja de diálogo listando los tipos de variables aparecerá. Hay que
seleccionar entre: NUMER1C VARIABLE, STRING VARIABLE, NUMERiC TABLE y
STR1NGTABLE.
Para todos los tipos de variables será necesario suministrar un nombre con el cual el
programa ios identificará. Existe un campo donde se pueden inicializar las variables
con valores predefinidos.
En los Sírings se debe definir el Ancho ( Width), que es el máximo número de
caracteres que el string puede contener.
Para las tablas existe un campo Longitud (Length) que especifica el máximo número
de elementos que pueden ser almacenados en la tabla.
La figura 3.14 muestra una configuración típica para una tabla numérica
.File .configure Charts Systen Print
NflHE TflBLft_HORflJUO$LENGTH 16TVPE INTEGERINIT. ¥ESSECURITV 8
M01: 7246K PROSRnh: TESIS CHART; OlfiSRftttOE.CQKTROLJiORñRIQ 20011: 0.500 SNftP OH
FIGURA 3,14 CONFIGURACIÓN DE UNA TABLA NUMÉRICA
50

3.3 OPCIONES DE CONTROL
Hay tres maneras básicas de ejecutar control en un sistema Opto 22
3.3.1 ' Control en el procesador
Se realiza mediante los diagramas de flujo realizados en el módulo de programa
llamado configurador. Figura 3.15
File Controller. Charts Susten
E3E33J
Print . " - • > . ' . - ' •••FkiüMikJ
. . . . . . . .
INICIO
\
<w(ÜÍOmüíJ TEES .
\ .
DDfiDiífiiHo uno\~
fF' '
!
RETñRDO
"" ENCENDER* • •
CDriQííftDíD DDS
RUN/STOP
PAUSE/CDNT
SNGL STEP
AUTO STEP
BREAK PT
DETAIL
I / 0
PID
E / R
UARIABLES
CHARTS
ZOOM IN
ZOOM OUT
PAN
tlEJl: 7S22K PROSftAft TESIS CHftRT: DIñSRAHñ_DE_COKTROL_HORftRIO ZOOtt 0.500
FIGURA 3.15 DIAGRAMAS DE FLUJO
51

Los comandos de operación que se incluye ai interior de cada bloque de OPERACIÓN
o CONDICIÓN pueden trabajar con:
- Puntos análogos.
- Operación con diagramas (Charis)
- Comandos de comunicación
- Puntos digitales
- Configuración de eventos/reacciones
- Comandos de propósito general
- Operaciones sobre unidades completas de E/S
- Ejecutar tareas lógicas
- Realizar operaciones matemáticas
- Construir lazos PID
- Trabajar con cadenas de texto (strings)
- Comandos de Tiempo / Fecha
La lógica es salvada secuencialmente como e! código es ejecutado. Las entradas son
examinadas y las salidas son actualizadas en el momento que se necesiten.
Este arreglo es extremadamente eficiente porque solamente los puntos de E/S que
son parte del código en un particular segmento del programa son leídos y
52

actualizados; el procesador no pierde tiempo manipulando E/S que no son parte del
programa que se este procesando en ese momento.
3.3.2 Control en las unidades inteligentes
La segunda manera de realizar control en un sistema Opto 22 es sobre las unidades
inteligentes de E/S, las cuales actúan como consoladores locales.
Cada unidad inteligente tiene un microprocesador que provee una funcionalidad local.
Ninguna programación es requerida para utilizar la mayoría de estas funciones. Será
necesario únicamente configurar la entrada o salida de una manera particular para
habilitar las características de control sobre ia unidad de E/S. Figura 3.16
I File Configure Charts Systen Print CONFIGURATOR I
• • •
. . .
. . .
. . ,
;
CONFIGURE DIGITAL I/O POINTUNIT DIG
CH* ÑAME00 PULSfil01 PULSAI
ITAUJJNO CENTRO_DE_CONTROL ftDDRESS 8G8
TVPE FEATURESHDKJtQTO!U40LINO DIN NONE>OR_MOTOR UEMTILftDORJJNO- DIN NONE
USED0e00
OPERATION
CONDITION
02 PULSOS MOTOR 1 DIN COUNTER 0203 UNUSED
66 UHUSE07 UNUSE88 ' UNUSE09 UNUSQ10 UNUSE11 UNUSE12 UNUSE13 UNUSE14 UNUSE15 UNUSE
ROD
CONFIGURE DIGITAL I/O POINT
ÑAME PULSOS_MOTOR_LTVPE DINMODULE 10 - 32 UDC G4IDC5FEATURES COUNTERDEFAULT LftSTENABLE VESUATCHDOG DISftBLEDSECURm 0
IM:1HÜ3i¿M i CANCEL J
1 I/UJ_L.II_J jm-iitiüi-j. 1 i "-i-n i ^^^uvi- ]
ETfilL
ÑAME
COPY
^ftSTE
MOUE
ESIZE
ÍOLOR
TEXT
10M-1N
. PAN
SS78K PRQSRAft TESIS CHART: 0!ñSRAm_EE_COKTROL_HOÍÍARIO ZOOtt: 0.500 SHAP OH
FIGURA 3.16 CONFIGURACIÓN DE UN PUNTO DE ENTRADA COMO CONTADOR
53

3.3.3 Eventos/Reacciones
Esta es una características que permite a las unidades de E/S realizar una estrategia
lógica independiente del procesador central.
Como el nombre lo sugiere, un evento/reacción consiste de una acción que
corresponde a un suceso determinado. Cada vez que un evento es verdadero, su
correspondiente reacción es ejecutada una vez.
Los eventos son estados definidos por el programador que una unidad de E/S puede
reconocer. Los estados definidos pueden ser una combinación de valores de entradas
y salidas.
Por ejemplo sobre una unidad digital cualquier combinación de estados de los
módulos de E/S (valores On u Off) pueden constituir un evento.
En una unidad análoga, un evento podría ser definido cuando un módulo de entrada
alcanza un valor de lectura seleccionado.
Ejemplos de reacciones incluyen el encender o apagar un conjunto de salidas, llevar
mediante una rampa una salida análoga hacia un valor final, habilitar o deshabilitar
otros eventos/reacciones.
Las unidades de E/S inteligentes también tiene la capacidad de actuar generando
interrupciones en el procesador central a través de un enlace de comunicación
separado.
Cuando el procesador central recibe una interrupción, inicia un diagrama suspendido
llamado Diagrama de Interrupción, donde el programador ha definido previamente la
lógica a ejecutar inmediatamente. ' .
54
Esto es muy utilizado para manejar condiciones de alarma y situaciones donde un
evento sobre una unidad de E/S debe causar una reacción rápida sobre otra unidad
de E/S.
Los eventos/reacciones son almacenados en cada unidad de E/S, y son monitoreados
en el orden en que han sido creados cuando es aplicada potencia a la unidad
respectiva.
Cualquier unidad de E/S puede ser configurada hasta con 256 eventos/reacciones,
una diversidad de actividades y secuencias pueden ser realizadas.
El utilizar eventos/reacciones presenta las siguientes ventajas;
- Se reduce la comunicación realizada entre las unidades de E/S y el
controlador maestro.
- Realiza una lógica de control distribuido que disminuye la concentración del
control en el procesador central.
- Maneja funciones lógicas a alta velocidad sobre cada unidad de E/S
- Se logra incrementar la velocidad de ejecución del programa fundamental
- Simplifica la estrategia central.
Aplicaciones típicas de evento/reacción son:
- Encendidos lógicos de motores
- Realización de secuencias
- Anuncio de alarmas
~ Controlar tendencias análogas
55

- Monitorear botones de emergencia
- Monitorear entradas análogas
- Auto búsqueda de comunicaciones de respaldo
Los eventos/reacciones son conformados en el módulo de configuración de cyrano
200 y son almacenados en ja memoria EEPROM que dispone cada unidad de E/S
mediante el módulo depurador del mismo programa; sí no son almacenados de esta
forma, cualquier pérdida de potencia en la unidad de E/S haría que los
eventos/reacciones configurados se pierdan.
En el ejemplo de la figura 3.17, se ha configurado un Evento/Reacción sobre ¡a unidad
de E/S DIGlTAL_UNO_CENTROJ3E_CONTROL
este consiste en que si el punto de entrada llamado PULSOS_MOTOR_J es mayor o
igual al valor de 50.000 se detiene el coníeo.-
-File;': Configure Charts : Sasten Print CONFIGURATOR 1
•••i _• EUENT/REACTION FOR I/O UNIT ~fl B
• • - *.
. . . .
UNIT DÍGITA L_UNO_CEKTRO_DE_CONT}ÍOL USED •!
CHftNGE OIGITftL EUENT/REACTION
•
^m
ÑAME EUENTO_REACCION_UNOENABLE VES INTERRUPT DISABLEDSECUílITV 0 INIT. STATUS SCftN
EUENT T!¿PE COUNTER >= UALUEI/O POINT PULSOS_MOTOR_1COMPARE UALUE 50808
REACTION TVPE STOP COUNTERI/O POINT PULSOS_MOTOR^L
|g:lv-:M3ji CANCEL
• •
• •
. . . . . . . . , . , . . . . . .
CONDITION
CONHECT
DETAIL
NAKE
CUT
CÜPY
PASTE
KQUE
• RESIZE
COLOR
TEXT
ZOGH-IN
ZOOM-QUT
PAN
HEH: 8578K PÍXJSWft TESIS CHFiRT: DIftSíñm_DE_COHTTÍOL_BORñRIO 2Cm aSOO SMAP ON
FIGURA 3.17 CONFIGURACIÓN DE UN EVENTO/REACCIÓN
56

3.4 ESTRUCTURACIÓN DE UN PROGRAMA
3.4.1 ESPECIFICACIONES Y REQUERIMIENTOS
• Un computador personal compatible con !a configuración mínima siguiente:
- Microprocesador 80386 de 33 Mhz
- 1 Mb Ram
- DisplayVGA
- Disco duro
- Mouse
- Puerto serial RS-232
• Programa Cyrano versión 3.0
• Sistema operativo D.O.S versión 5.0 o mayor
• Controiador Opto 22 ( G4LC32 )
• Unidades de E/S análogas y/o digitales de acuerdo a la aplicación
• Módulos o puntos de E/S, de acuerdo a la aplicación
• Cables seriales para conección desde el PC al controlador (RS-232) y unidades de
E/S (RS-485) '
3.4.2 DISEÑO
Hay tres pasos fundamentales para crear y correr un programa:
1. Desarrollarla aplicación en módulo configurador
2. Descargar la aplicación en el controlador y depurarla en el módulo
Depurador.
3. Correr la aplicación en e! controlador solo.
Al abrir el módulo configurador automáticamente se carga el último programa editado.
Para crear un nuevo diagrama hay que seleccionar New desde el menú Charts
Cuando diseñamos un programa se procura que cada chart ( diagrama ) controle un
aspecto de la aplicación. Al ingresar al módulo configurador vemos que el programa
tiene dos diagramas por defecto: POWERUP e INTERRUPT, en el primero y mediante
57

el comando Start Chart se deben incluir todos los diagramas que deseamos se inicien
deforma inmediata.
El diagrama INTERRUPT es especial en el hecho de que siempre se encuentra en
estado suspendido, SÍ una interrupción es generada por cualquier unidad de E/S, el
diagrama pasa inmediatamente a modo activo ( running), por tanto aquí se deben
diseñar las actividades a realizar en el momento de recibir una interrupción.
Mediante las herramientas OPERATION, CONDITION y CONNECT, se va
construyendo las estrategias de control para cada diagrama.
En cada bloque de Operación o Condición, mediante ¡a herramienta DETAIL (o doble
click sobre el bloque), se ingresa ha una ventana de edición. FIGURA 3.18
File' Configure . Charts Systen Print CQNFIGURATOR
CHANCE CUT COPY PASTE
OPERATION
CONDITION
CONHECT
ÑAME
CUT
COPY
PASTE
HOUE
RESIZE
COLOR
TEXT
ZOOM-IN
ZOOM-OUT
8573K PROGRfitt TESIS CHART: DIftSftñm_[E_aWTROL_HOÍÍñRIO ZOOrt 0.500 SNfiP ON ttCOü D£C (
FIGURA, 3.18 VENTANA DE EDICIÓN
58

La ventana de edición debe contenerlas operaciones que realizará el bloque. Se debe
presionar la tecla ADD (añadir) para incluir una operación o condición en el bloque.
Los comandos se ingresan de tres maneras distintas;
1. Escribiendo el comando completo, ejemplo: MOVE
2. Escribiendo las primeras letras del comando, esto abrirá una caja de
diálogo que lista los comandos que empiezan con dichas letras.
3. Sin escribir ningún carácter y presionando la tecla ENTER, se accesa a
una lista de operaciones disponibles para el tipo de bloque. Figura 3,19
File Configure Charts Systen Print CONFIGURATOñ
INICIO—
OPERATION
GROUP SELECTIONSDIGITAL POINTfi NA LOG POI NT •' r, "^ '•'' l$<>'GENERAL PURPOSD'?' ' .LOCICfiLCHARTKATHEMATICñLSTRING 'TIME/DATECOMMUNICATIONI/O UNITPIDNULOGIC MOTION CTL-COMMONNULOGIC MOTION CTL-SERUONULOGIC MOTION" CTL-STEPEUENT/ÍÍEACTION. - :.SUBROUTINES • *
EXIT
h:
OPERATION
CONDITIGN
. COKNECT
ÑAME
CUT
COPY
CUT COPY PASTE
EE
IH
ZOOM-OUT
PAN
ttEH: 8162K PROGRAH: TESIS CHART: DIA6WWJJE_CONTROLJ«lftRIO ZOOtt 0.500 SHftP OH rtQQE: DEC |
FIGURA 3.19 SELECCIÓN DE LA OPERACIÓN
59

Una vez escogida la operación se procede a seleccionar los operandos eligiendo la
unidad y el punto ( o variable ).
La selección de los operandos también es restringida de acuerdo al tipo de operación.
60

4.- DESARROLLO DE UNA APLICACIÓN MEDIANTE EL CONTROLADOR
OPTO 22
4.1- CONSIDERACIONES
El control de iluminación en túneles involucra tres tipos de problemas:
El efecto que tiene sobre el conductor e! ingresar un túnel, la rapidez de adaptación
una vez ingresado a! túnel y el nivel de iluminación en el interior del mismo.
Para salvar esto es necesario subdividir al túnel en diferentes zonas:
Zona Umbral, cuya iluminación debe ir en función de la claridad de los accesos al
túnel. Su longitud es determinada en base a la distancia de visibilidad de frenado
para una velocidad permitida.
Zona Transición, determinada por la distancia observada por un conductor desde el
momento cuando sus ojos han terminado de adaptarse al cambio de iluminación de la
primera zona.
Zona Central, que sirve para adaptar completamente al conductor a un nivel mas bajo
de iluminación sin que exista una caída lumínica mayor a 2.5 veces.
Zona de Salida, que lo constituye el resto del túnel.
Realizar estas subdivisiones a nivel de iluminación permiten que el túnel mantenga
condiciones de seguridad y confort en el tráfico.
Esto involucra depender en todo momento de la variación de la iluminación exterior
para controlar los niveles interiores.
61

Portante será necesario medirlos niveles de luminosidad del entorno-acceso del túnel
y mediante un determinado sistema de control regular la intensidad luminosa de cada
zona.
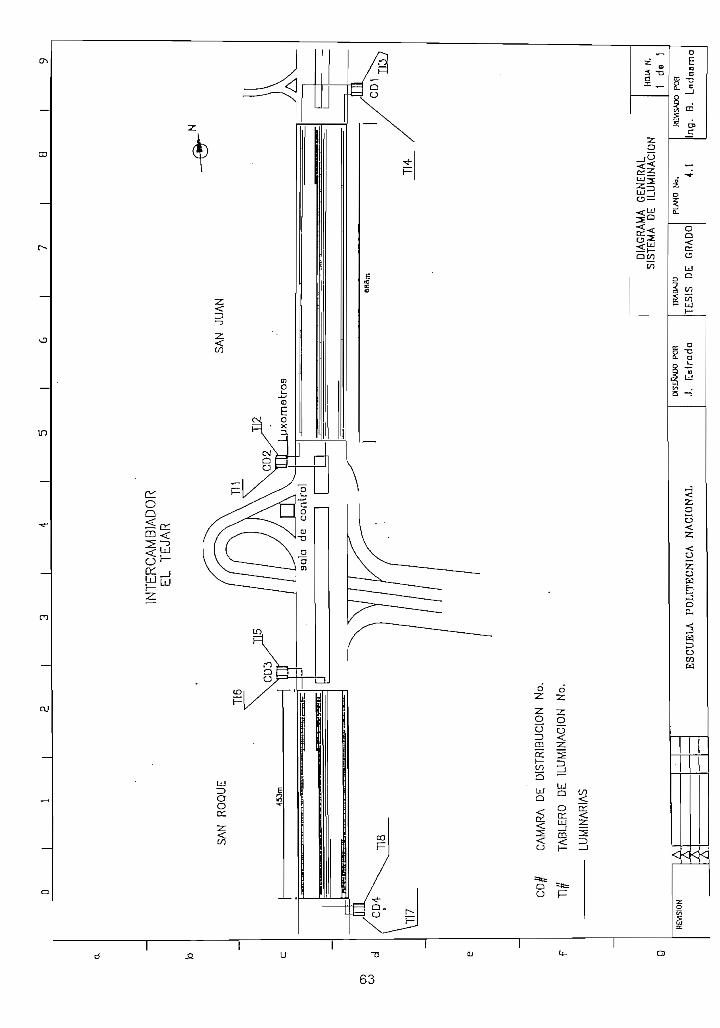
4.1.1 DESCRIPCIÓN GENERAL DEL SÍSTEMA
Para la iluminación de los Túneles de San Juan y San Roque, se dispone al inicio y
final de cada tune! de cámaras de distribución desde donde el sistema toma la energía
necesaria para alimentar luminarias de 150 y 400 Watts en sodio alta presión
colocadas sobre los muros laterales de cada galería a una altura de 4.7m.
Se debe realizar el control de los circuitos de iluminación que se dispone en los sitios
siguientes:
-Cámara San Juan Norte ( CD1 )
-Cámara San Juan Sur ( CD2 )
-Cámara San Roque Norte ( CD3 )
-Cámara San Roque Sur ( CD4 )'
Cada cámara es alimentada por un transformador independiente y dispone de dos
Tableros de Control de luminarias, uno para galería tal como lo muestra el plano 4.1
Esta disposición permite una alta flexibilidad de operación, ya que en caso de falla de
un transformador se pierde solamente la alimentación de un lado de cada galería del
Túnel.
La disposición de luminarias y circuitos se la ha realizado considerado las siguientes
zonas de iluminación en las longitudes señaladas al interior de cada galería:
62
I»'
en co
SA
N
RO
QU
E
INT
ER
CA
MB
1AD
OR
EL
T
EJA
R
CD
# C
ÁM
AR
A
DE
D
IST
RIB
UC
IÓN
N
o.
Tl#
T
AB
LER
O
DE
IL
UM
INA
CIÓ
N
No,
LUM
INA
RIA
S
SA
N
JUA
N
V oí — -"
f ~1 y —
f
.jjxo
mst
ros
)r nH
^v_
DIA
GR
AM
A G
EN
ER
AL
SIS
TEM
A
DE
IL
UM
INA
CIÓ
NH
OJA
ti
.
\e
REVI
SIÓN
ES
CU
EU
P
OL
ITÉ
CN
ICA
N
AC
ION
AL
HS
ER
AD
O
POR
J.
[-¡a
irad
aTE
SIS
D
E G
RA
DO
4.1
RE
VIS
AD
O
PO
ÍÍ
Ing
. 0.
L
od
oam
a

ZONA SAN JUAN SAN ROQUE
1. Umbral 50 m. 50 m.
2. Transición 60 m. 60 m.
3. Central 60 m. 60 m.
4. Salida 518 m. 283 m.
El control y regulación de la intensidad de alumbrado está en función de las
condiciones exteriores de la siguiente manera:
ILUMINANCIA
EXTERIOR
( LUXES )
> 20. 000
2,000-20.000
< 2.000
NIVELES REQUERIDOS DE ILUMINANCIA (Luxes)
ZONA 1
2.000
1.000
45
ZONA 2
1.000
500
45
ZONAS
400
200
45
ZONA 4
100
100
45
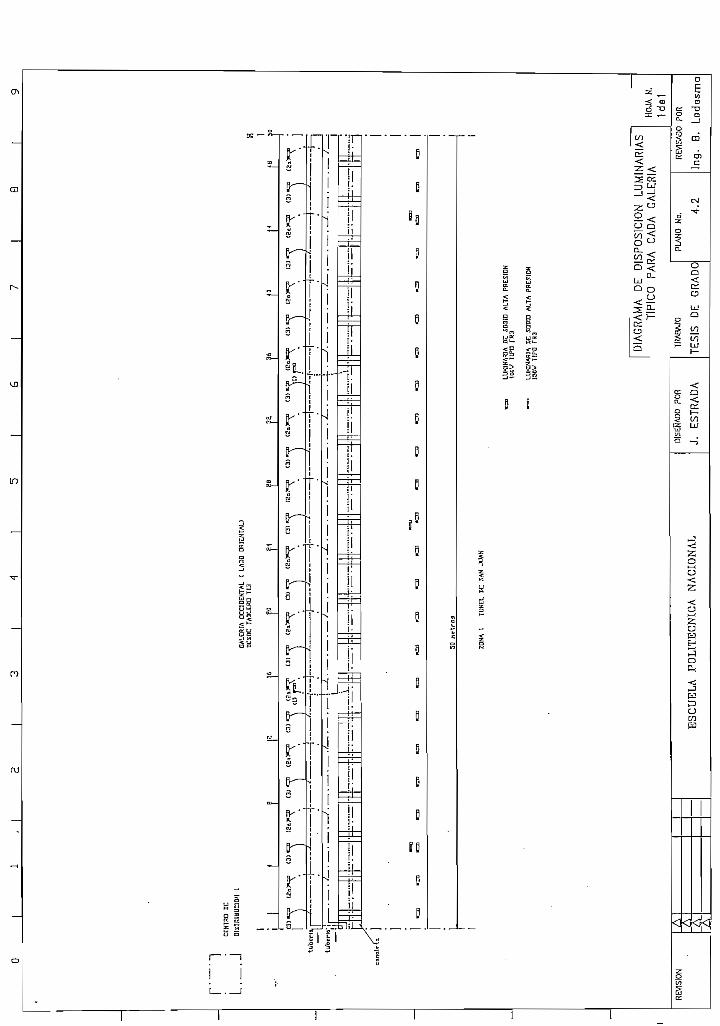
Para cumplir estos niveles se ha dispuesto las luminarias para cada zona y en cada
galería a una altura de 4.7m. ver plano 4,2, aquí se puede observar la distribución de
luminarias para la zona 1 vista en planta.
El circuito de control unifilar típico de un tablero de iluminación es presentado en el
plano 4.3 Este indica cantidad y en que zonas están ubicadas las luminarias
correspondientes a cada circuito.
64
•(*'
r" L.
.C
ENTR
O
DE
f J
D
ISTR
IBU
CIÓ
N I
GAL
EFU
A
OC
CID
EN
TAL
< LA
DO
O
RIE
NT
AL)
DE
sne
TAB
LER
O 7
13
J!2a?qjJ
C
3) *^
IS
a'^
P
(33 «^
(2
nX
^i
(3) «3*
(3nX
?>
(3) "
(E
nX
i t3
) *?
>
CE
aX
^ (3
) *^
ÍS
uje
aj
(3)
«qn
(GaM
L
.! ,
, 1
, ,
T j
1 1
1 ,
, _—
, (
rrr:
ZON
A I
TU
NE
l, D
E
SA
N J
UA
N
LUM
INA
RIA
D
E
SO
DÍD
A
LTA
P
RE
S1D
N10
0V
TIP
O
TR
3
LUM
INA
RIA
D
E
SD
DID
A
LTA
P
RE
SIÓ
N13
DV l!ru
F
R3
DIA
GR
AM
A
DE
D
ISP
OS
ICIÓ
N
LUM
INA
RIA
ST
ÍPIC
O
PA
RA
C
AD
A
GA
LER
ÍAHO
JA N
.1
de
1
RE
VIS
IÓN
ES
CU
EL
A
PO
LIT
ÉC
NIC
A
NA
CIO
NA
L
DIS
EÑ
AD
O
PO
R
J.
ES
TR
AD
A
TR
AB
AJO
TE
SIS
D
E G
RA
DO
PLAN
O No
, 4.2
RE
VIS
AD
O
PO
R
Ing.
G.
Lo
da
sma

•p-<*•
<*;
ÍQO
O-ÍM
/131V
UN
EA ir
A e.
o. X
VN
H-!
7SO
A
DA
HR
*S
oc
DIS
TR
IOU
aO
CD
1
YH
0111
íOlb
3P
-3C
4lIO
loJP
-4(K
oiO
l3P
-W
JJP
HO
A
3xN
n.1
/OA
WO
¡
Wd
i
E T
IOlb
TA
BLE
RO
TI 4
lo
an e
03
1 Ib
3P-1
M
Ir-
fo 8
i
CIR
CU
Í:
CW
CU
ITO
3a
OfW
1
llO
HA
S
(I
ON
* J
l 70
NA
» 4
MW
40m
jj M
Jfío
mJ
(ígv_ |
J 9
5F
-i 3
I
J_
3 ! _
J_
J
|
Z¿
_l
ti;iiií
iLj._
!._i
L
| E
z_4
¡
"Ep+
ZE
Z^Z
C-h
---
•"—
i "I
1
1 Q
~'—
I"'
1—
\ I
11
'>
_,
J
i .-
~\
> i
8
t I
_,
1
] J
[ ,
j 1
Cln
ca
no
?(f
' i
I i
'l
il
i 1
wnb
r^ Sí í K> S
ÍCU
RO
3b
MI I
d
1 1IC
Utr
O lo
loru
i
IIO
NA
3
haw
, ¿
1
KJH
A 4
iair
j_
ígoyji
ww
M
!2í!
X.J
5™
,_l-
_ 1
2S
L
rLr_|1
r_ij__
bfl
"¡>"
1« i
[7 L
7 L
"»i_
!
1
1— ,
J- —
,,—
,,—
I —
ii
1
~
I
¡
1
1
r i..
t i
* *"
i i
CE
KIT
KI
ce nnw
BU
cioH i
WJJ
JM O
CaK
NTM
. (ta
da w
f.nla
f) '
DIA
GR
AM
A Ü
NIF
ILA
R
TÍP
ICO
SIS
TEM
A
DE
IL
UM
INA
CIÓ
NH
OJA
N-
1 de
1
REVI
SIÓN
.AE
SC
UE
LA
PO
LIT
ÉC
NIC
A
NA
CIO
NA
LD
ISE
ÑA
DO
P
OR
j_
Es!r
ad
a
TR
AB
AJO
rE
S]s
D
E
GR
AD
O
PLv\
NO
No. 4
.3
RE
VIS
AD
O
PO
R
[ng
<
B-
ud
es
ma

4.1.2 FUNCIONAMIENTO
El sistema de iluminación de los túneles de San Juan y San Roque, estará controlado
mediante dos luxómetros de captación con salida 4-20 mA, que miden los valores de
luminosidad del entorno de los túneles y mediante el sistema de control Opto 22 se
regulará la intensidad luminosa de cada zona de acuerdo a lo especificado.
Para facilitar la supervisión y monitoreo del sistema de iluminación y de las demás
instalaciones, el centro de control dispondrá de un computador en el cual y mediante
una interface adecuada presentará pantallas amigables de operación
Se prevee tres tipos de funcionamiento;
Automático, en este modo los niveles de iluminación serán controlados por el par de
fotoceldas; mediante una función temporizada por programa, se evita la reacción de la
regulación por alteraciones breves de las condiciones exteriores (nubes).
En caso de falla de los dos luxómetros, el programa automáticamente debe ingresar a
un tipo de control Horario definido por el operador.
Además en cualquier instante será posible intervenir y controlar los circuitos de
iluminación de forma manual loca! ( desde cada tablero de iluminación ) o.Manual
remota ( desde el computador ubicado en la sala de control).
Además se podrá presentar gráficos-de los valores de luminosidad exterior y
diagramas representativos de los estados de los circuitos en cada galería.
67
4.2- PROGRAMACIÓN Y DIAGRAMACION DE RUTINAS
Se presenta el hardware necesario y la programación efectuada en Cyrano 200 para
realizarla estrategia de control de iluminación.
Se dispone de un controlador principal Opto 22 G4LC32 ubicado en ¡a sala de control;
este se comunica mediante los puertos O y 1 (en RS-232) y a una velocidad de 38.400
bps, con dos computadores maestros los cuales corren los programas PARAGON
TNTy-Cyrano200.
Se han utilizado los oíros dos puertos del controlador ( RS-485 ) para comunicarnos
con las cámaras de distribución CD1 - CD2 de San Juan ( puerto 3 ) y CD3 - CD4 de
San Roque ( puerto 4 ), a una velocidad de 115.000 bps. Ver plano 4.4
68
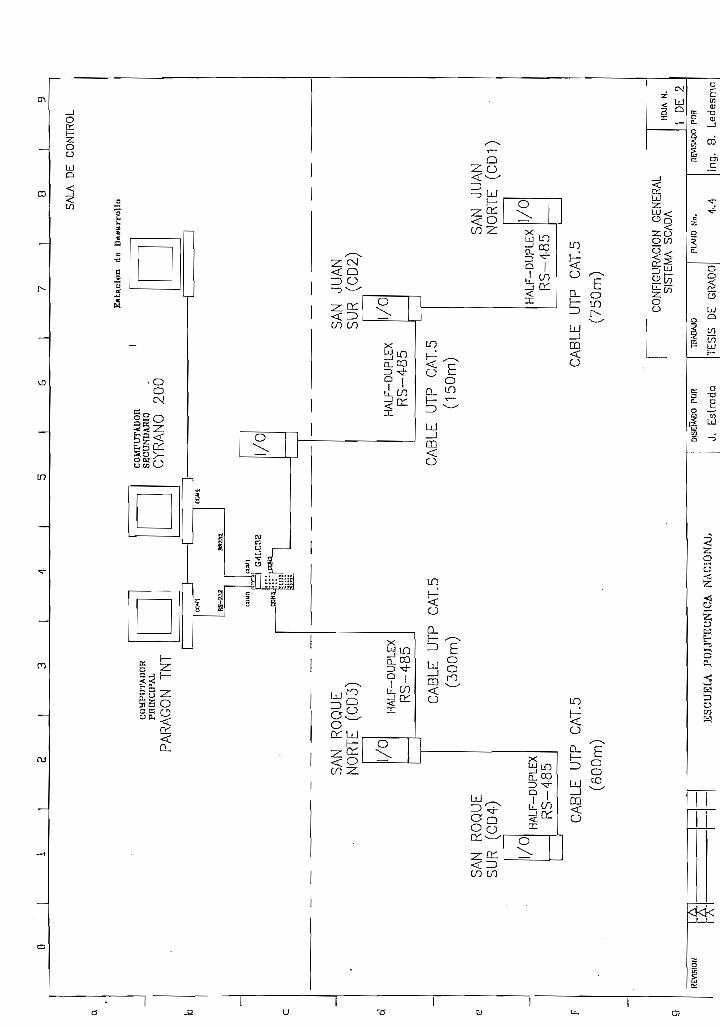
<*"
CO
MP
UT
AD
OR
PA
RA
GO
N
TNT
SA
N
RO
QU
EN
OR
TE (C
D3)
I/O
SA
N
RO
QU
ESU
R
(CD
4)
1/0
HA
LF-D
UP
LEX
RS
-48
5
HA
LF-D
UP
LEX
RS-
4-85
ESIG
4LC
3B.T
OW
L-
CA
BLE
U
TP
CA
T.5
(30
0rn
)
CA
BLE
U
TP
CA
T.5
(GO
Om
)
SA
LA
DE
C
ON
TRO
L
CO
MP
UT
AD
OR
SEC
UN
DA
RIO
CY
RA
NO
20
0
do
Dao
nrro
llo
1/0
SA
N
JUA
NSU
R (
CD
2)
HA
LF-D
UP
LEX
RS
-48
5
1/0
CA
BLE
U
TP
CA
T.5
(15
0m
)
SA
N
JUA
NN
OR
TE (C
D1
)
HA
LF
-DU
PLE
X
RS
-48
5I/
O
CA
BLE
U
TP
CA
T.5
(750m
)
CO
NFI
GU
RA
CIÓ
N
GE
NE
RA
LS
ISTE
MA
S
CA
DA
HO
JA
N.
1 D
E 2
ES
CU
EL
A.
PO
XJT
J3C
NIC
A
NA
CIO
NA
L
DIS
EÑ
AD
O
PO
R
J.
Est
rad
aTE
SIS
D
E
GR
AD
O4,4
RE
VIS
AD
O
PO
R
!ng.
8.
Led
esm
a

0|
i 2
3
4
| 5
6
7
8
| 9
SA
LA B
E O
TN
TR
DL
-.. _,,
C
AB
LE
PLA
NO „
CH
LC32
H ^
,oa
10
cuN
DU
CJD
HE
snK
urf
oc*
I/G
*
W"\
S
SIS
TEM
AS
\a
\> —
f?l
"*" T
x +
O—
• -c
— "i tfP
ff
T*
Uni
dad
E/S
V
T
/A
C
DM
IRO
A
Dtt
Y
\ V
H
TPA
SS
Jrtd
ad
E
/S^no
la34
G4D
I6R
ADD
-11
Jrtc
íad
E/S
Í4
G4D
16R
AD
D.
15
Uni
do d
E
/Str
no
ta
G4D
16R
AD
D.
LWdo
d E
/Sí«
na
taG
4
G4D
16R
AD
D.
14
\d E
/S\a \™
G4D
Í6R
AH
D.
13
\-JU
MP
ER
S'
ti
{ )
Mít
lc
BDD
\ Y
R
"no
fto0
cr
I/a
'-11
P
AR*
D
TR
DS
S
ISTE
MA
S
\ V
fV •'"flí"
Tx
Jrtd
ad E
/S
(T
ÍYÍ
»rR
X
G4D
16R
A
X
CD
HIR
Q
ADB-
U
) B
lB
16
X
V
BY
PA
SJ
Uni
dad
E/S
Irno-t
nG
-l
G4D
1GR
AD
D.
17
U
f)C
AB
LE P
LA
H]
A
' V
SA
N R
OQ
UE
SU
R
/~]D
C
ON
DU
CTO
RES
H
l*tc
EO
D
(|
[1
Mjt
icH
OO
/ !/D
'«
P
AR
A
CU
RD
S
SIS
TEM
AS
Intr
rCocí
W
V
In'T
focf
Jnid
od E
/S
Uni
dad E
/S
/ U
nida
d E
/S
Jntd
ari C
/S
Uni
dad E
/S
Uni
dad E
/S
Uni
dad E
/S
7*+
TO
-^ ,<J/
(L
v
-Wl*-
T.
JrtJad
E/S
ífn
oto
R
rno
ta
/Hrn
otn
ír
no
ta
Rrn
ota
R
rno
tn
de
no
to
'" -«>
V-/
^ S
f t
íí
no
ta54
G
4
/ G
4
G4
G
4 G
4
G4
R
x- I
*P
R>
<
^
JUH
PE
RS
C
4D16
R
G4D
16R
G
4D16
R
, R
ES
ER
VA
G
4D1G
R
G4D
16R
R
x- *P
f\]
ÍFR
x
G4C
16R
C4D
16R
' C
on
[«J—
>
U
(J
L ~
{5J
Con
ADD
. AD
D.
ADD
. A
JJ.
AD
D.
AD
p.
AE
ft
Í??9P
H
A
A
'SIS
0
ÍS"1
É6
63
£•'
63
bg
61
b
u
H [ B
1
1 II
U 1 ti
4aE
YP
AS
S
V
Y
BY
PA
SS
Uni
dad
E/S
\o
\.
A
G4D
lfiR
ADD
.10
Jnld
od
E/S
G4D
16R
AH
D-
19
34
G4D
16R
EO
V
I/D
'*
TAR
A D
TRD
S
SIS
TEM
AS
Itnata
G4D
1GR
ADD
-41
()
0._
C
AB
LE P
L.A
K3
A
' V
SA
H R
OQ
UE
NTJ
RTE
/
la
CD
HD
UC
IOH
tS
Hl* "lie
E
DO
(
f)
Hit
ieS
OO
/ I/
D '«
P
AR
A
Ü7R
OS
SIS
TEM
AS
Int'rf
ocr
W
W
Inte
rfa
cí
/ —
R«
no
ta
A
A
Re
no
taU
nida
tí E
/S
/ U
nida
d E
/S
LJnl
dad
E/S
U
nida
d E
/S
Urfl
dnd E
/S
JnkJ
ad E
/S
T,-t[P
Í-JyW
lu
J -48^
TV
Jr
tdod E
/SR
rnota
/
Rrn
ota
l»
no
ta
Re
na
ta
Rrn
olo
ír
no
ta
- íFtr
^P
-Iík
: R
rno
taG
4 /
G4
G
4 G
4
G4
G
< R
x+ $
|
1
|LR
>*
G4
r,
/ C
nñ"[íj —
|J
Lj_
[»J
Cnn
JUK
PE
RS
y G
4D16
R
G4f
ll6R
C
4D16
R
G4A
BR
G
ÍD16
R
G4D
16R
"**- S
f^l
1 H
^r"
"
G4D
16R
AD
D.
ADD
. AD
D-
ADD>
AD
D>
ADD
- 1R
OC
OM
C
OH
lRO
AD
D.
73
71
73
75
71
70
B\3
S
|9
50
HV
PA
SS
BTP
AS
S
Jn>d
Jín
.G
4
Uni
dad
EV
Slé
ña
la
G4A
9R
AD
D.
Um
dnd E
/SH
iñóla
G1 G
4D16
R
AD
Di
43
Uni
dad E
/I5
en
ata
G4D
I6R
ADD
-4
4
JUH
PE
RS
'
SA
N
Unld
oii
E/S
Rrn
ota
G4 G
4D16
R
AD
D.
43
JUA
M S
UR
34 JUH
PE
RS
-G
1316
R
AD
D.
46
CA
BLE
PLA
NO -,
JA
N J
UA
N N
OR
TEI/O
•,
PA
RA
D
TRD
S
SIS
TEM
AS
10 ^IX
JC
TO
RE
^
nd
E
/Sita
G4D
I6R
AD
D.
31
REVI
SIÓ
N A
ni
sFíJ
Ann
pnR
A
ES
CU
ELA
P
OLI
TÉ
CN
ICA
N
AC
ION
AL
i c^
-mA
r,o
M
j.
p.si
raci
aA
Uni
dad
E/S
Rtn
oto
G4
G4A
OR
AH
D.
32
ldad
E/S
írn
ata
AO
Hi
33
Uni
dad
E/S
Hrn
ola
G4 G
-4D
I6R
AD
D.
34
I C
ON
FIG
UR
AC
IÓN
G
EN
ER
AL
1 SI
STEM
A
SC
AD
A
1R
AB
AJO
P
LA
NO
N
o.
TESI
S
DE
G
RA
DO
4.
4
Uni
dad E
/S \a
\,
\R
AD
D.
33
Vi'd
ad E
/S
JUH
PE
RS
G4D
I6R
AD
D.
36
HOJA
N.
2
DE
2R
EV
ISA
DO
P
OR
Ing.
B.
Lede
sma

4.2.1 HARDWARE
Mediante el programa Cyrano 200 , y utilizando uno de sus utilitarios Bill of Materials
del menú Tools se presenta todo e! equipo Opto 22 necesario para realizar la
aplicación.
Qty Part#
TOTAL : 10 Unit(s)
I/O BOARDS
Type Description
118
G4A8RG4D16LG4D16R
ANALOGDIGITALDIGITAL
REMOTE MF ANALOGLOCAL MF DIGITALREMOTE MF DIGITAL
ANALOG I/O POINTS
Qty Part# Type Description
2 GENSRIC AIN
TOTAL ; 2 Analog Point(s)
0.0000 ~ 25000.0000 LUX
Qty
DIGITAL I/O POINTS
Part# Type Descráption
721424
'TOTAL
G4IAC5AG40DC5G40AC5A
DINDOUTDOUT
110 Digital Point(s)
Total I/O Points : 112
180 - 280 VDC5 - 6 0 V D C24 - 280 VAC
71

Se usará una unidad de E/S tipo análogo G4A8R, la cual procesará y linealízará las
señales de dos módulos análogos (4-20mA) conectados a dos luxómetros.
Las unidades de E/S tipo digital G4D16R serán 8, repartidas dos por cada centro de
distribución (CD); estas contendrán módulos de entrada y salida que recogen señales
ON-OFF de voltajes y comandan las bobinas de los contactores de fuerza.
Existe una unidad de E/S local, G4D16L con sus respectivos módulos ( 14 G4ODC5 ),
usada de forma ficticia para facilitar la programación de control.
El plano 4.5 muestra cada unidad de E/S, su dirección.sus módulos respectivos y
etiquetas utilizadas en ei desarrollo del programa; además describe su utilidad.
72
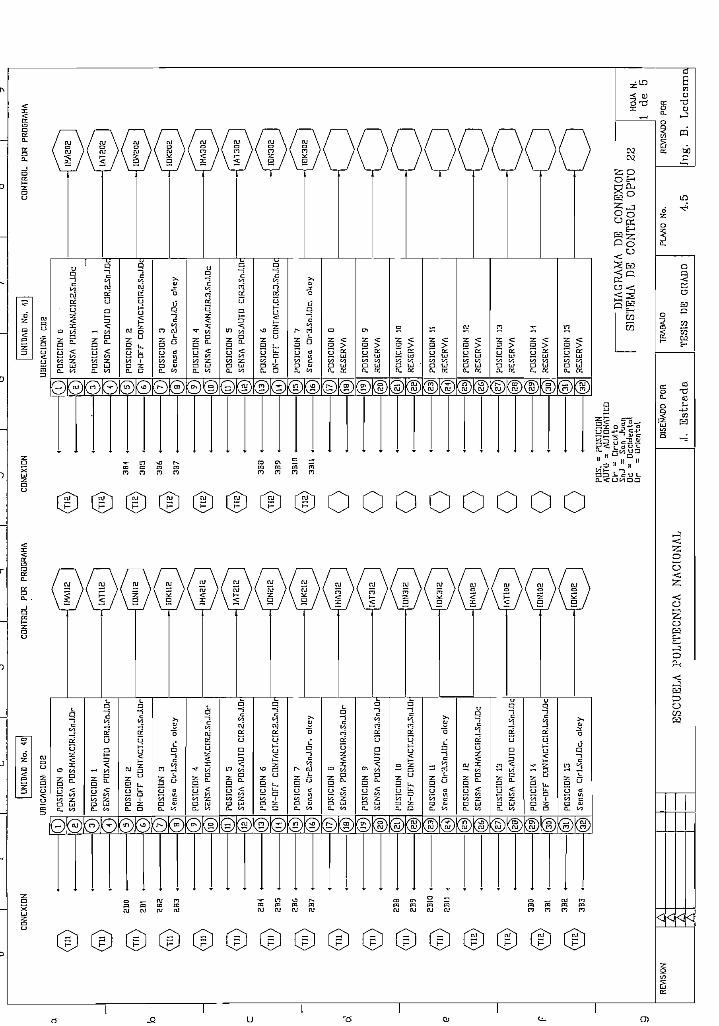
CO
NE
XIÓ
N
(T
U)
(T
IÍ)
6"H )
(TU
)
(TJ1)
(TU
)
(TU
)
(TU
)
(TU
)
(TU
)
(TU
)
(TI 2
)
(TI2)
(TI a
)
(TI a
)
RFV
ISIO
fJ
A A £ ,s
0 © (2)
35 © & (Z)
0~ 0 © (u)
® © © © 55 © ®~ © (§) © © (23) g (H* (si) © (3) © g (3Í)
@
UN
IDA
D
No.
40
UB
ICA
CIÓ
N'
CD
2
PO
SIC
IÓN
0
SE
NS
A
PD
S.M
AN
.CIR
.l,S
nJ-G
r
PO
SIC
IÓN í
SE
NS
A
PD
S.A
UTD
C
IR,l.
SnJ
.Dr
PO
SIC
IÓN
2
DN
-OF
F
CaN
TA
CT
.CIR
.l.S
nJ-O
r
PO
SIC
IÓN
3
Se
nsa
C
!rl.S
nJ,
Dr.
o
ke
y
PO
SIC
IÓN
4
SE
NS
A
PD
S,IÍ
AN
.CIR
.2.S
nJ.O
r
PO
SIC
IÓN
5
SE
NS
A
PO
S.A
UTD
C
IR.a
.SnJ
.Dr
PO
SIC
IÓN
6
(IN
-DF
f C
DN
TA
CT
,CIR
.E.S
nJ.n
r
PO
SIC
IÓN
7
Sen
sa.
Clr2
.SnJ.
Or.
ol
<ey
PO
SIC
IÓN
0
SE
NS
A
PO
S.H
AN
.CIR
.3,S
nJ.O
r
PO
SIC
IÓN
9
SE
NS
A
PD
S.A
UTD
C
IR.S
.SnJ
.Or
PO
SIC
IÓN
10
ON
-OF
F
CD
NT
AC
T.C
IR.3
.SnJ
,Or
PO
SIC
IÓN
U
Sen
sa
Clr3
.SnJ.
Dr.
ol
<ey
PO
SIC
IÓN
12
SE
NS
A
PD
S.H
AN
.C!R
.I.S
nJ,D
c
PO
SIC
IÓN
13
SE
NS
A
PD
S.A
UTD
CIR
.l.S
nJ.D
c
PO
SIC
IÓN
14
DN
-DF
F
CD
NT
AC
T,C
IR,l.
SnJ
.Oc
PO
SIC
IÓN
15
Scn
sa
ClrI
.SnJ.
Gc.
o(
<ey lljoL.1
CO
NT
RO
L P
OR
P
RO
GR
AM
A
CO
NE
XIÓ
N
I>C
~
e> —
^m
.
^^^
\
-
\
3311 .
^"^
—
]>C
^
]>C
"
I>C
~
^xC
H
^C
~
Fm
o-
1 \
,^^^
PO
S.
= P
OS
ICIÓ
NA
UTO
=
AU
TOM
ÁTI
CO
Clr
= C
ircu
ito
SnJ
= S
an Ju
tinO
c = O
ccid
en
tal
Or
- Q
rlcn
-tol
® (E) (5 <3 ® (ZJ ® 0 ® © © (2) 55 © © © ® © 15 ÍE) g @ e e (el)
© © ^5 © @
UN
IDA
D
Na,
41
UB
ICA
CIÓ
N
CD
2
PO
SIC
IÓN
0
SE
NS
A
PO
S.H
AN
.CIR
.2.S
nJ.D
c
PO
SIC
IÓN
1
SE
NS
A
PQ
S.A
UTO
C
IR.2
.SnJ
.Dc
PO
SIC
IÓN
2
DN
-DF
F
CD
NT
AC
T.C
IR2.
SnJ
.Oc
PO
SIC
IÓN
3
Sen
so.
Clr2
.SnJ.
Oc
al<
cy
PO
SIC
IÓN
4
SE
NS
A
PD
S.H
AN
,CIR
.3.S
nJ,D
c
PO
SIC
IÓN
5
SE
NS
A
PO
S.A
UTO
C
IR,3
.SnJ
.Dc
PO
SIC
IÓN
6
PN
-DF
f C
DN
TAC
T.C
IR,3
.SnJ
.Oc
PO
SIC
IÓN
7
Se
nsa
Q
r3.S
nJ.
Oc.
o
ko
y
PO
SIC
IÓN
G
RE
SE
RV
A
PO
SIC
IÓN
9
RE
SE
RV
A
PO
SIC
IÓN
10
RE
SE
RV
A
PO
SIC
IÓN
11
RE
SE
RV
A
PO
SIC
IÓN
12
RE
SE
RV
A
PO
SIC
IÓN
13
RE
SE
RV
A
PO
SIC
IÓN
14
RE
SE
RV
A
PO
SIC
IÓN
15
RE
SE
RV
A
i D
IAG
RA
M1
SIS
TE
MA
DE
DIS
EÑ
AD
O
PO
R
TRA
BA
JO
IEU
PO
LIT
ÉC
NIC
A
NA
CtO
NA
L _,_
^
^ D
f¡
CO
NTR
OL
PO
R
PRO
GR
AMA
>c;
r^^
c^
kJ
^ ^ ^^
^^
^1
^^
^]
k^
1
r^i
k^
1
^^
kJ
^ D
E
CO
NE
XIÓ
NC
ON
TR
OL
OP
TO
22
HOJA
N.
i de 5
PLA
NO
N
o.
RE
VIS
AD
O
PO
R
4.5
Jng.
B
. L
ed
esm
n

CO
NE
XIÓ
N
(+>
<Lux
y
(-)
4
<-!•) ,
.
(LU
X3
f-1 ,
W ® 3 ® JL) i G) (?) í°) © jja)
fÍ3^
v^y
© @ © (l?)
55 ©~ ©~ (21)
© © ©~ (§)
Í5 @ (ae) © @ ( (32)
UN
IDA
D
Na,
4£
J
UB
ICA
CIÓ
N
CD
2
PD
SIC
IDN
0
SE
NS
OR
D
E IL
UH
iNñC
iDN
1
1 a
20
nA
PO
SIC
IDN
1
SE
NS
OR
D
E IL
UM
INA
CIÓ
N E
4 a
20
nA
PD
SIC
IÜN
Z
PO
SIC
IÓN
3
PO
SIC
IÓN
4
RE
SE
RV
A
PO
SIC
IÓN
5
RE
SE
RV
A
PO
SIC
IÓN
6
RE
SE
RV
A
PO
SIC
IÓN
7
RE
SE
RV
A
RFV
iqnN
A A
T
A
..
lA
CO
NT
RO
L P
OR
P
RO
GR
AM
A
CO
NE
XIÓ
N
^T ^
^™
)
(T
I3)
|¡
/-v
2C
O ,
L j
/TI3
\I 3)
\ /
gpg
,
—
(T
I3)
(T
I3)
(ría
)
(TD
)\
2C7
4
(T
I3)
(T
I3)
(TIS
)
(Tía
;\_
J
HC
Il
-.
<™
>
(™
)
{TU
)
(TU
)
PO
S,
=
PO
SIC
IÓN
AU
TO
=
A
UT
OM
AT
ICC
lr
= C
ircuito
SnJ =
S
an Juan
De =
D
ccid
gn
tat
Dr
= O
rienta
l
£) ® (V) ® © © ¡ x_/ (!)
© © (Ta) © © © (S)
(ÍT)
© © (20) ©, © @ (e5
© (se) © © (an)
(af)
w 0
UN
IDA
D
Na
5
0
UB
ICA
CIÓ
N'
CD
1
PO
SIC
IÓN
0
SE
NS
A
PD
S,M
AN
,CIR
.!.S
nJ,
Dc
PO
SIC
IÓN I
SE
NS
A
PD
S.A
UT
O
CJR
.i.S
nJ.
Dc
POSI
CIÓN
eO
N-O
FF
C
DN
TA
CT
.CIR
.l.S
nJ.
Oc
PO
SIC
IÓN
3
Sensn
Clrl.S
nJ.O
c.
oke
y
POSI
CIÓN
^S
EN
SA
P
DS
,MA
H.C
JR.a
.SnJ
.Qc
PO
SIC
IÓN
S
SE
NS
A
PQ
S.A
UTD
C
IR.2
,SnJ.
Oc
PO
SIC
IÓN
6
ON
-OF
F
CD
NT
AC
T.C
IR.2
.SnJ.
Ot
PO
SIC
IÓN
7
Se
nsa
Clra,S
nJ.a
c.
oke
y
PO
SIC
IÓN
B
SE
NS
A
PO
S,M
AN
,CIR
,3.S
nJ,O
c
PO
SIC
IÓN
9
SE
NS
A
PO
S.A
UT
O
CIR
.3.S
nJ.
Oc
PO
SIC
IÓN
10
ON
-OF
F
CQ
NT
AC
T.C
IR,3
.SnJ
.Dc
PO
SIC
IÓN
U
Sensa
Clr3
.SnJ.
Oc.
o
tte
y
PO
SIC
IÓN
12
SE
NS
A
PO
S.H
AN
,CIR
.l,S
nJ.
Or
PO
SIC
IÓN
!3
SE
NS
A
PD
S.A
UT
O
CIR
.l.S
nJ,
Or
PO
SIC
IÓN H
ON
-OF
F
CO
NT
AC
T.C
IR.l,
SnJ.
Dr
PO
SIC
IÓN
15
Se
nso
ClrI,S
nJ.Ü
r.
aU
ey
1 ^D
IA,
| S
ÍST
EM
CO
NT
RO
L P
OR
P
RO
GR
AM
A
-ÍIA
Tia
i J
4lO
N10í
]
-TlO
KiO
l 1
^RA
MA
D
E
CO
NE
XIÓ
N\E
C
ON
TR
OL
OP
TO
22
HOJA
N.
2 de
5
DIS
EÑ
AD
O
PO
R
TR
AB
AJO
P
LAN
O
No.
R
EV
ISA
DO
P
OR
ES
CU
ELA
P
OLI
TÉ
CN
ICA
N
AC
ION
AL
T „
,
, _
orf
1 „
„ „
„
. e
„
T _,
,T.
Estr
ad
a
TESI
S D
E O
RADO
4.
5 tn
g.
B.
Le
de
sma

o o o o o o o o
fc-í
TíC
o2:
o2:
PO,P
tr1nP-
ÍS-
- >Tí G-3002!
Í6 ;
Oí'
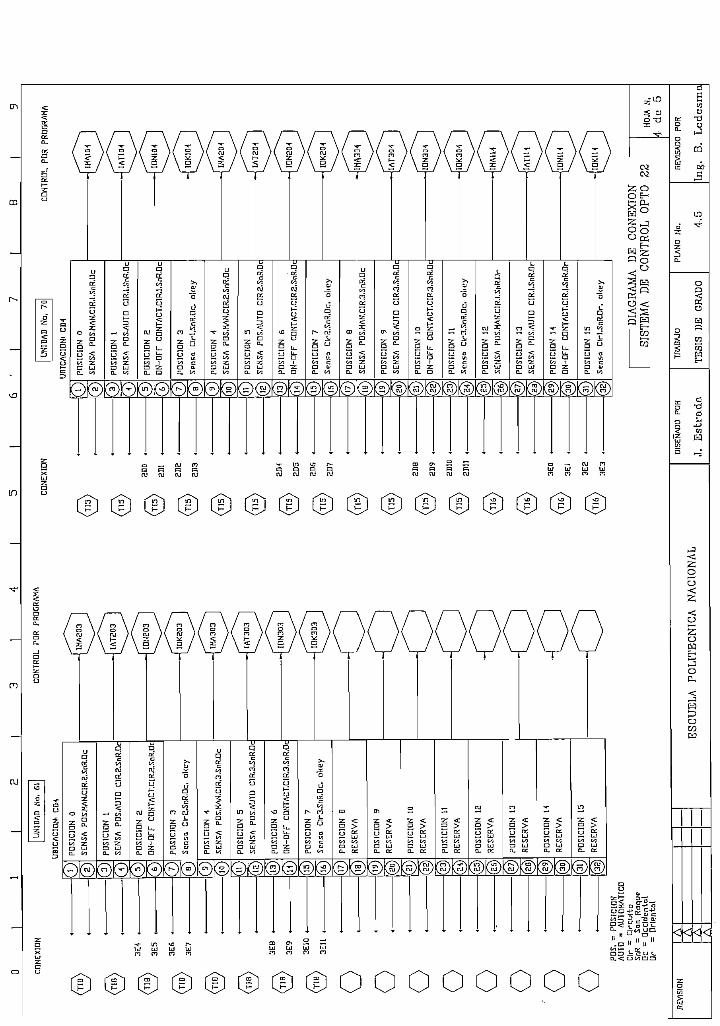
o o o o o o o o
t=lt-
o3.— to
oo

CO
NE
XIÓ
N
/TI6
\TI6)
(n&
\ 3T
TÍ
,
(ne)
(TIfi)
(TIG
)
(ríe
)
(TI e
^
< >
< >
.< >
:
< >
:( > ( >
• ( > < >
POS.
=
POSI
CIÓ
NAU
TO
= AU
TOM
ÁTIC
OC
lr =
Circu
itoSn
R =
San
R
aque
Oc
= O
ccid
enta
lD
r =
Ori
en
tal
nn/K
iinH
A A
"
CjQ
lAA
0 ©~ © © 0 ® 0 © 0 © 0 © © 1 © ^£)
P ^5
© (S5)
@ 0 @ 0 © (3l)
@
UN
IDA
D
No.
71
PD
SIC
ÍDN
0
SE
NS
A
PD
S.H
AN
,CIR
.8.S
nR.D
r
PD
SIC
ÍDN
1
SE
NS
A
PQ
S.A
UT
D
ClR
.a.S
nR
.dr
PD
SIC
ÍDN
2
QN
-orF
C
DN
TA
CT
.CJR
,2.S
nR.D
r
PO
SIC
IÓN
3
Sensa C
lr2.S
nR
.Dr. a
ltcy
PO
SIC
IÓN
4
SE
NS
A
PD
S,H
AN
.CIR
.3.S
nR.D
r
PO
SIC
IÓN
5
SE
NS
A
PG
S.A
UT
O
CIR
.3.S
nR.D
r
PD
SIC
ÍDN
6
DN
-OF
F
CO
NT
AC
T.C
!R.3
.SnR
.Ur
PO
SIC
IÓN
7
Se
nsa
Cir3.S
nR
.Dr. o
ke
y
PO
SIC
IÓN
0
RE
SE
RV
A
PO
SIC
IÓN
9
RE
SE
RV
A
PO
SIC
IÓN
10
RE
SE
RV
A
PO
SIC
IÓN
11
RE
SE
RV
A
PO
SIC
IÓN
12
RE
SE
RV
A
PO
SIC
IÓN
13
RE
SE
RV
A
PO
SIC
IÓN H
RE
SE
RV
A
PO
SIC
IÓN
15
RE
SE
RV
A
CO
NT
RO
L
PO
R
PR
OG
RA
MA
t\>
J
^]
t-^
r^]
k^
1
.r^^
L^
-(^^1
k^
1
ri
~kJ
r^ k
1( kJ
k^1
¡ D
IAuK
AM
Á
JJJB;
C
ON
EX
IÓN
I S
IST
EM
A D
E
CO
NTR
OL
OP
TO
22
HOJA
N5
de
5
DIS
EÑ
AD
O
PO
R
TRA
BA
JO
PLA
NO
N
o.
RE
VIS
AD
O
PO
R
JELA
P
OLI
TÉ
CN
ICA
N
AC
ION
AL
T _
. ,
,,,nc,ic,
nri ^
lt,r
t .
_ T
„
T _,
J.
Estr
ad
a
TESI
S
DE
GR
AI30
/J
..5
Ing.
B,
Lcd
esm
o

4.2.2 BASES DE DATOS
Se describen las variables numéricas, de texto, tablas numéricas y [as unidades y
puntos de E/S que intervienen en la programación.
Variable
ACTUAL
Descripción
Utilizada para conocer si existe un requerimiento
de actualización de los estados de los circuitos.
C1R1.CIR2.CIR3 Indican si el estado de los circuitos respectivos
esONuOFF.
HOR Variable que almacena la hora actual
HORTAB Variable que recoge la hora de cada elemento
de la tabla horaria
LIMITDOWN Variable que es comandada desde Paragon, e
indica el valor en luxes para encender-apagar el
circuito 2, cuando se trabaja en modo
automático.
LIMITUP Variable que es comandada desde Paragon, e
indica el valor en luxes para encender-apagar el
circuito 3, cuando se trabaja en modo
automático.
LUX Medición promediada de 180 muestras
LUX1.LUX2 Almacena los valores de los luxómetros 1 y 2
78

LUX1NI, LUXPRV,
LUXTOT
Almacenamientos de lectura iniciales y temporales
MIN Variable que almacena los minutos actuales
MINTAB Variable que recoge los minutos de cada
elemento de la tabla horaria
MUESTRAS Indica el número de valores iniciales medidos
POINTER Variable que indica el elemento analizado de las
tablas
PRVFLT Almacenamiento de valores promedio provisionales
RSLT Variable para almacenar resultados no utilizados.
STAT.TSAT2.STAT3 Variables que recogen los estados de los circuitos de
circuitos de acuerdo a lo marcado por el operador.
TIMER1 Variable de tiempo utilizada para conocer sí las
fotoceldas se han restablecido.
STRING1.STRING2
STRING3
Variables de texto para almacenar estados de
las fotoceldas y modo de trabajo del sistema.
Tabla
HOR
Descripción
Tabla que almacena las horas seleccionadas por
el operador para realizar cambios en los estados
de los circuitos de iluminación.
LUXTABLE Tabla de valores promedio de iluminación
79
MIN Tabla que almacena los minutos seleccionados
por el operador para realizar cambios en los
estados de los circuitos de iluminación.
STATUS Tablas que almacena los estados seleccionados
STATUS2 por e! operador para encender o apagar circuitos de
STATUS3 de forma horaria.
80

Numeric Table Variables
ÑAME LENGTH TYPE - INIT
String Variables
SECURITY
HORLUXTABLEMINSTATUSSTATUS 2STATUS 3
1718017171717
INTSGERFLOATINTEGERINTEGERINTEGERINTEGER
NONONOYESYESYES
000000
ÑAME INIT. WIDTH
STRING1STRING2STRING3
NONONO
20' 2024
SECURITY USED
OOo
ooo
Numeric Variables
ÑAME TYPE INIT. VALUÉ SECURITY
ACTUALCIRC1CIRC2CIRC3HORHORTABLIMITDOWNLIMITUPLUXLUX1LUX2LUXINILUXPRVLUXTOTMINMINTABMUESTRASPOINTERPRVFLTRSLTSTATSTAT2STAT 3.TIMER1
INTEGERINTEGERINTEGERINTEGERINTEGERINTEGERINTEGERINTEGERFLOATFLOATFLOATFLOATFLOATFLOATINTEGERINTEGERINTEGERINTEGERFLOATINTEGERINTEGERINTEGER •INTEGERTIMER
YESYESYESYESYESYESYESYESYESYESYESYESYESYESYESYESYESYES.YESYESYESYESYES ' ,YES .' '
000000
200015000
0000
. . o00000•o0
: o• • o0
• . • .0
0000000000000 .000.00000
. o00
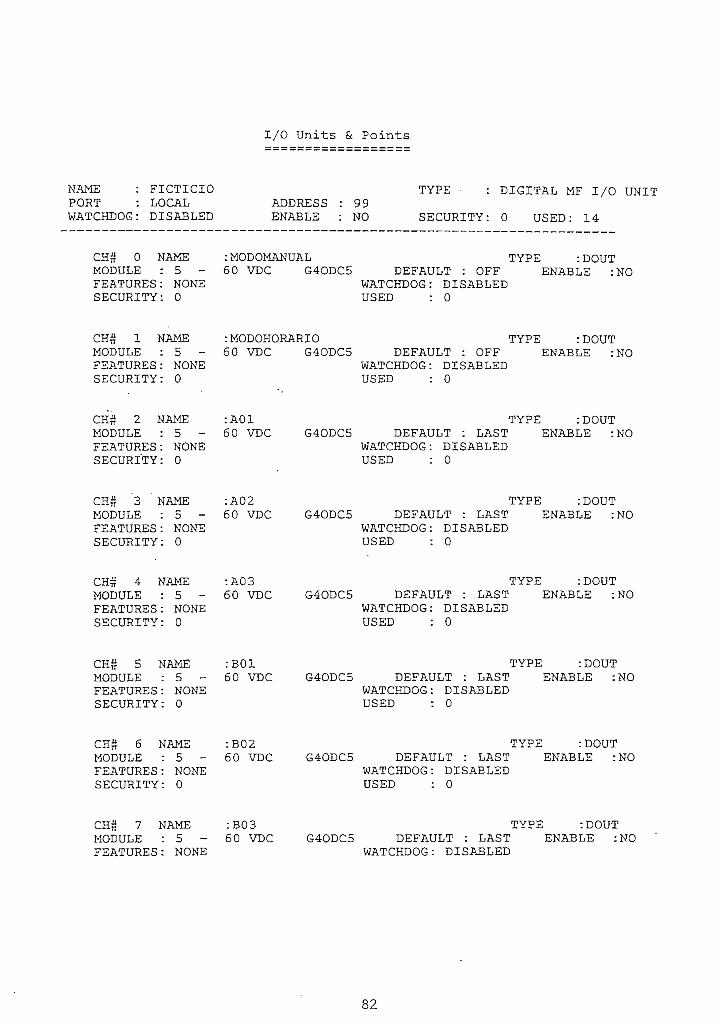
I/O Units & Points
ÑAMEPORTWATCHDOG
FICTICIOLOCALDISABLED
ADDRESSENABLE
99NO
TYPE : DIGITAL MF I/O UNIT
SECURITY: O USED: 14
CH£ O ÑAME -.MODOMANUAL TYPE :DOUTMODULE 5 - 6 0 VDC G40DC5 DEFAULT : OFF ENABLE :NOFEATURES NONE WATCHDOG: DISABLEDSECURITY O USED : O
CHS 1 ÑAMEMODULE : 5 -FEATURES: NONESECURITY: O
:MODOHORARIO TYPE :DOUT60 VDC G4ODC5 DEFAULT : OFF ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CHS 2 ÑAMEMODULE : 5 -FEATURES: NONESECURITY: O
:A01 TYPE :DOUT60 VDC G40DC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CHS 3 ÑAME : AO 2 TYPE : DOUTMODULE 5 - 6 0 VDC G40DC5 DEFAULT : LAST ENABLE : NOFEATURES NONE WATCHDOG: DISABLEDSECURITY O USED : O
CHS 4 ÑAMEMODULE : 5 -FEATURES: NONESECURITY: O
:A03 TYPE :DOUT60 VDC G40DC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CHS 5 ÑAMEMODULE : 5 -FEATURES: NONESECURITY: O
:B01 TYPE :DOUT60 VDC G4ODC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CHS 6 ÑAMEMODULE : 5 -FEATURES: NONESECURITY: O
:B02 TYPE :DOUT60 VDC G4ODC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CHS 7 ÑAME :B03MODULE : 5 - 60 VDCFEATURES: NONE
TYPE :DOUTG40DC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLED
82

SECURITY: O USED
CH# 8 ÑAMEMODULE : 5 -FEATURES: NONESECURITY: O
:C01 TYPE :DOUT60 VDC G4ODC5 DEFAULT .: LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 9 ÑAMEMODULE : 5 -FEATURES: NONESECURITY: O
:C02 TYPE :DOUT60 VDC G40DC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 10 ÑAMEMODULE : 5 -FEATURES: NONESECURITY: O
:C03 .. TYPE :DOUT60 VDC G40DC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 11 ÑAMEMODULEFEATURESSECURITY
5 -NONEO
:D01 TYPE :DOUT60 VDC G40DC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 12 ÑAMEMODULE : 5 -FEATURES: NONESECURITY: O
:D02 TYPE :DOUT60 VDC G40DC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 13 ÑAMEMODULEFEATURESSECURITY
5 -NONEO
:D03 TYPE :DOUT60 VDC G40DC5 DEFAULT : LAST ENABLE :NO
WATCHDOG: DISABLEDUSED : O
ÑAMEPORTWATCHDOG
R40D_SAN_JUAN_SURREMOTE 2 ADORESS : 40DISABLED ENABLE : YES
TYPE : DIGITAL MF I/O UNIT
SECURITY: O USED: 16
CH# OMODULEFEATURESSECURITY
ÑAME :IMA112180 - 280 VACNONEO
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 1 ÑAME :IATI12MODULE : 180 - 280 VACFEATURES: NONE
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLED
83
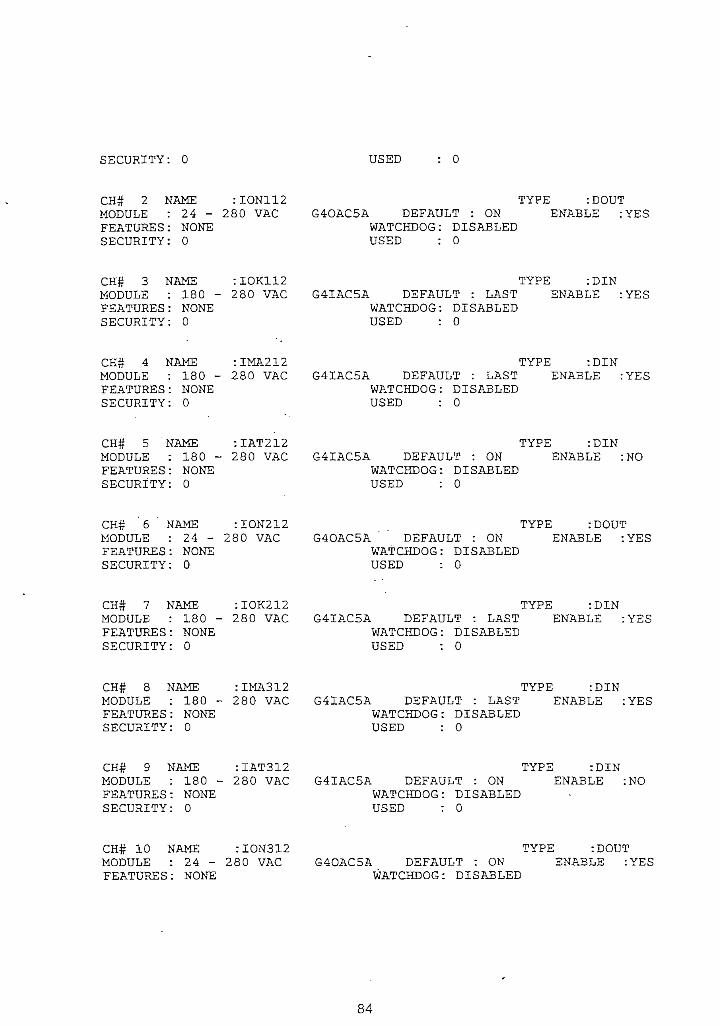
SECURITY: O USED
CH# 2 ÑAME :ION112MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG40AC5A DEFAULT : ON ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 3 ÑAME :IOK112MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 4 ÑAME :IMA212MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 5 "ÑAME :IAT212MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 6 ÑAME :ION212MODULE : 24-280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG40AC5A ' DEFAULT : ON ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 7 ÑAME :IOK212MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 8 ÑAME :IMA312MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 9 ÑAME :IAT312MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 10 ÑAME :ION312MODULE : 24 - 280 VACFEATURES: NONE
TYPE :DOUTG4OAC5A DEFAULT : ON ENABLE :YES
WATCHDOG: DISABLED
84

SECURITY: O USED
CH# 11 ÑAME :IOK312MODULE : 180 - 280 VACFE ATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 12 KAME :IMA102MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 13 ÑAMEMODULEFEATURESSECURITY
:IAT102180 - 280 VACNONEO
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 14 ÑAME :ION1Q2MODULE : 24 - 280 VAC.FEATURES: NONESECURITY: O
TYPE :DOUTG40AC5A DEFAULT : ON ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 15 ÑAME :IOK102MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A . DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAMEPORTWATCHDOG
R41D SAN JUAN SUR TYPE : DIGITAL MF I/OREMOTE 2 ADDRESS : 41DISABLED ENABLE : YES SECURITY: 0 USED: 8
CH# O ÑAME :IMA202MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE : YES
WATCHDOG: DISABLEDUSED : O
CH# 1 ÑAME :IAT202MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 2 ÑAME :ION202MODULE : 24 - 280 VACFEATURES: NONE
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLED
85
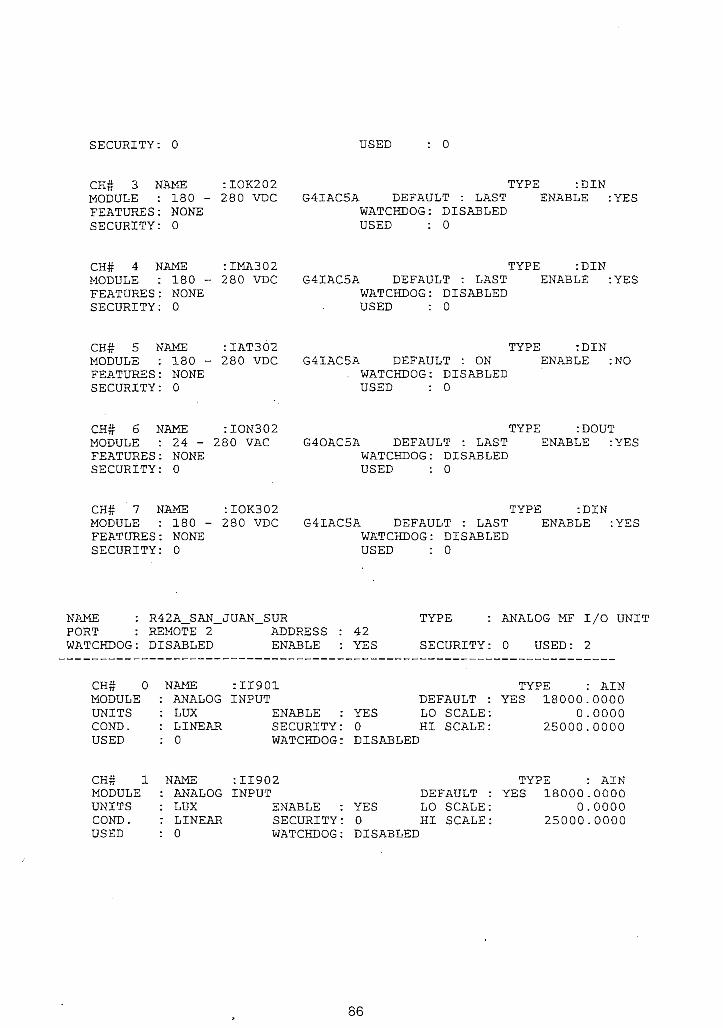
SECURITY: O USED
CH# 3 ÑAMEMODULE : 180 -FEATURES: NONESECURITY: O
:IOK202 TYPE :DIN280 VDC G4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 4 tMODULEFEATURESSECURITY
ÍAME180 -NONE0
:IMA302280 VDC
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 5 ÑAMEMODULE : 180 -FEATURES: NONESECURITY: O
:IAT302 TYPE :DIN280 VDC G4IAC5A DEFAULT : ON ENABLE :NO
. WATCHDOG: DISABLEDUSED : O
6 ÑAME :ION302MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 7 ÑAME :IOK302MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAMEPORTWATCHDOG
R42A SAN JUAN SURREMOTE 2 ADDRESS : 42DISABLED ENABLE : YES
TYPE : ANALOG MF I/O
SECURITY: 0 USED: 2
CH# OMODULEUNITSCOND.USED
ÑAME :II901: ANALOG INPUT: LUX ENABLE :: LINEAR SECURITY:: O WATCHDOG:
TYPE : AINDEFAULT : YES 18000.0000
YES LO SCALE: 0.0000O HI SCALE: 25000.0000DISABLED
CH£ 1 ÑAME :II902MODULE : ANALOG INPUTUNITS : LUX ENABLE :COND. : LINEAR SECURITY:USED : O WATCHDOG:
DEFAULT :YES LO SCALE:O HI SCALE:DISABLED
TYPE : AINYES 18000.0000
0.000025000.0000
86

ÑAMEPORTWATCHDOG
R5 OD_S AN_JUAN_NORTEREMOTE 2 ADDRESS : 50DISABLED ENABLE : YES
TYPE : DIGITAL MF I/O UNIT
SECURITY: O USED: 16
CHS O ÑAME :IMA101MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CHS 1 ÑAME :IAT101MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CHSMODULEFEATURESSECURITY
ÑAME :ION10124 - 280 VACNONEO
TYPE :DOUTG4OAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH£ 3 ÑAME :IOK101MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CHS 4 ÑAME :IMA201MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A ' DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
5 ÑAME :IAT201MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH£ § ÑAME :ION201MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG4OAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CHS 7 ÑAME :IOK201MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 8 ÑAME :IMA301 TYPE
87

MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
G4IAC5A DEFAULT : LASTWATCHDOG: DISABLEDUSED : O
ENABLE :YES
CH£ 9 ÑAME :IAT301MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH£ 10 ÑAME :ION301MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG4OAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 11 ÑAME :IOK301MODULE : 180 - 280- VDCFEATURES: NONESECURITY: O
CH£ 12 ÑAME :IMA111MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE ¡DING4IAC5A DEFAULT : LAST ENABLE '
WATCHDOG: DISABLED i 'USED : O
:YES
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES,
WATCHDOG: DISABLEDUSED : O
CHg 13 ÑAME :IAT111MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A ' DEFAULT : ON ENABLE' :NO
WATCHDOG: DISABLEDUSED : O
CH# 14 ÑAME :ION111MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUT .G40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 15 ÑAME :IOK111MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAMEPORTWATCHDOG
R51D_SAN_JUAN_NORTEREMOTE 2 ADDRESS : 51DISABLED ENABLE : YES
TYPE DIGITAL MF I/O UNIT
SECURITY: O USED: 8
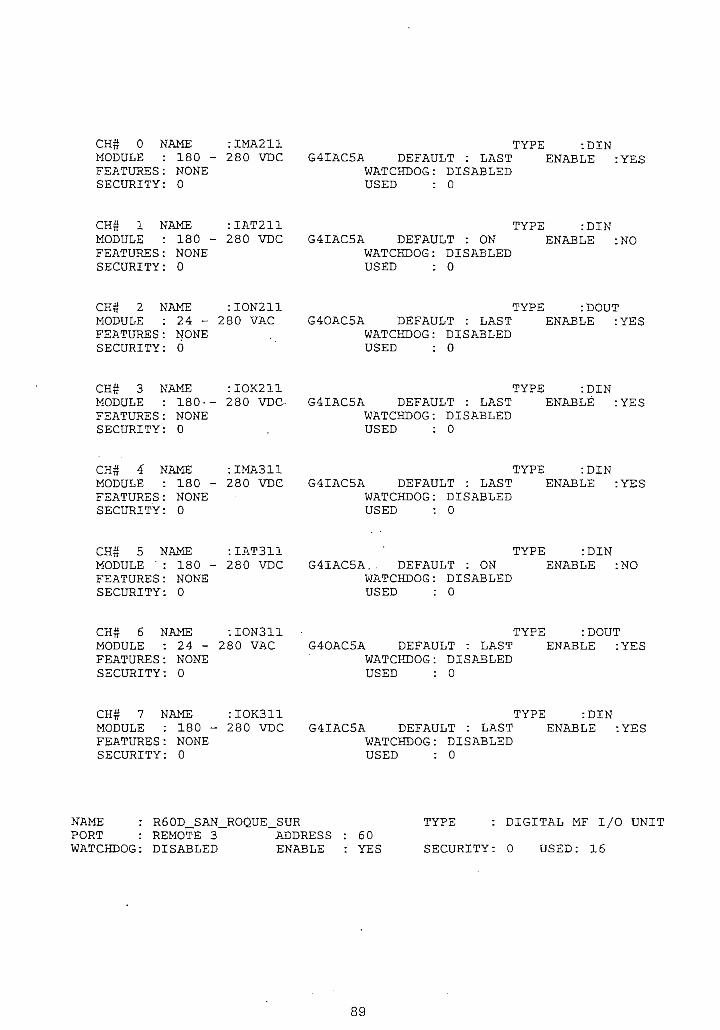
CH# O ÑAME :IMA211MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 1 ÑAME :IAT211MODULE : 180 ~ 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH£ 2 ÑAME :ION211MODULE : 24 - 280 VACFEATURES: NONESECURITY: Ó
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAME :IOK211MODULEFEATURESSECURITY
180 •- 280 VDC.NONE
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAME :IMA311MODULEFEATURESSECURITY
180 - 280 VDCNONEO
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAME :IAT311MODULE 'FEATURESSECURITY
180 - 280 VDCNONEO
TYPE :DING4IAC5A.. DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
ÑAME :ION311MODULEFEATURESSECURITY
24 - 280 VACNONEO
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CHÍ 7 ÑAME :IOK311MODULEFEATURESSECURITY
180 - 280 VDCNONE
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAMEPORTWATCHDOG
R60D_SAN_JROQUE_SURREMOTE 3 ADDRESS : 60DISABLED ENABLE : YES
TYPE : DIGITAL MF I/O UNIT
SECURITY: O USED: 16
89

CH# O ÑAME :IMA113MODULE : 180 - 280 VDCFEATÜRES: NONESECURITY: O
TYPE :DING4I-AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 1 ÑAME :IAT113MODULE : 180 - 280 VDCFEATÜRES: NONESECURITY: O
TYPE :DING4IAC5A DEFAÜLT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 2 ÑAME :ION113MODULE : 24 - 280 VAC-FEATURES: NONESECURITY: O
TYPE :DOUTG4OAC5A DEFAÜLT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 3 ÑAME :IOK113MODULE : 180 - 280 VDCFEATÜRES: NONESECURITY: O
TYPE :DING4IAC5A DEFAÜLT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH£ 4 ÑAME :IMA213MODULE : 180 - 280 VDCFEATÜRES: NONESECURITY: O
TYPE :DING4IAC5A DEFAÜLT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 5 ÑAME :IAT213MODULE : 180 - 280 VDCFEATÜRES: NONESECURITY: O
TYPE :DING4IAC5A DEFAÜLT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 6MODULEFEATÜRESSECURITY
ÑAME :ION21324 - 280 VACNONEO
TYPE :DOUTG40AC5A DEFAÜLT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 7 ÑAME :IOK213MODULE : 180 - 280 VDCFEATÜRES: NONESECURITY: O
TYPE :DING4IAC5A DEFAÜLT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED ; O
CH# 8 ÑAME :IMA313MODULE : 180 - 280 VDCFEATÜRES: NONE
TYPE :DING4IAC5A DEFAÜLT : LAST ENABLE :YES
WATCHDOG: DISABLED
90

SECURITY: O USED
CH# 9 ÑAME :IAT313MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 10 ÑAME :ION313MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 11 ÑAME :IOK313MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 12 ÑAME :IMA103MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 13 ÑAME :IAT103MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 14 ÑAME :ION103MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 15 ÑAME :IOK103MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAME : R61D_SAN__ROQUE_SURPORT : REMOTE 3 ADDRESS : 61WATCHDOG: DISABLED ENABLE : YES
TYPE DIGITAL MF I/O UNIT
SECURITY: O USED: 8
CH# O ÑAME :IMA203MODULE : 180 - 280 VDCFEATURES: NONE
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLED
91

SECURITY: O USED
CH# 1 ÑAME :IAT203MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE : NO
WATCHDOG: DISABLEDUSED : O
ÑAME :ION203MODULEFEATURESSECURITY
24 - 280 VACNONEO
TYPE :DOUTG4OAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 3 ÑAME :IOK203MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 4 ÑAME :IMA303MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 5MODULEFEATURESSECURITY
ÑAME :IAT303180 - 280 VDCNONEO
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 6 ÑAME :ION303MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH£ 7 ÑAME :IOK303MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAMEPORTWATCHDOG
R7 OD_S AN_ROQUE_NORTEREMOTE 3 ADDRESS : 70DISABLED ENABLE : YES
TYPE : DIGITAL MF I/O UNIT
SECURITY: O USED: 16
CH# O ÑAME :IMA104MODULE : 180 - 280 VDCFEATURES: NONE
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLED
92

SECURITY: O USED
CH# 1 ÑAME :IAT104MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE ;NO
WATCHDOG: DISABLEDUSED : O
CH# 2 ÑAME :ION104MODULE : 24-280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG; DISABLEDUSED : O
CH# 3 ÑAME :IOK104MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 4 ÑAME :IMA204MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 5 ÑAME :IAT204MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 6 ÑAME :ION204MODULE : 24 - 280 VACFEATURES: NONESECURITY; O
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 7 ÑAME :IOK2'04MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 8 ÑAME :IMA304MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 9 ÑAME :IATS04MODULE : 180 - 280 VDCFEATURES; NONE
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLED
93

SECURITY: O USED
CHS 10 ÑAME :ION304MODULE : 24 - 280 VACFEATURES: NONESECURXTY: O
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CHS 11 ÑAME :IOK304MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CHS 12 ÑAME :IMA114MODULE : 180 - 280 VDC.FEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CHS 13 ÑAME :IAT114MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CHS 14MODULEFEATURESSECURITY
ÑAME :ION11424 - 280 VACNONEO
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
•WATCHDOG: DISABLEDUSED : O
CHS 15 ÑAME :IOK114MODULE : 180 - 280 VDCFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
ÑAMEPORTWATCHDOG
R71D_SAN_ROQUE_NORTEREMOTE 3 ADDRESSDISABLED ENABLE
: 71: YES
TYPE :
SECURITY :
DIGITAL
0 USED
MF
: £
i/o
3
UNIT
CHS O ÑAME :IMA214MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CHS 1 ÑAME :IAT214MODULE : 180 - 280 VACFEATURES: NONE
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLED
94
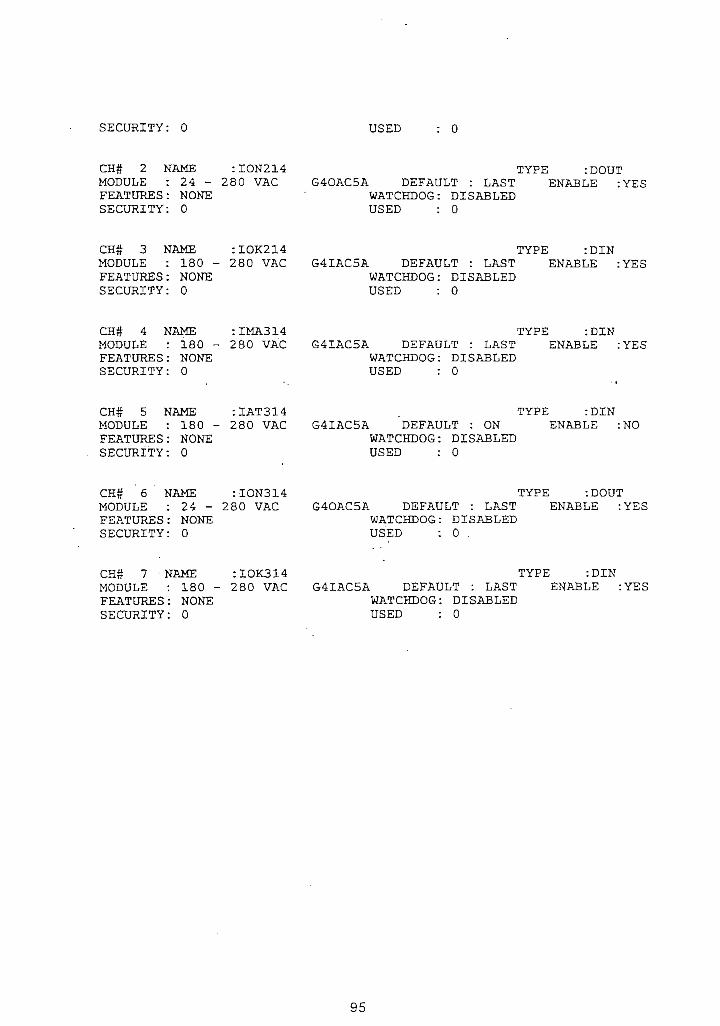
SECURITY: O USED
CH# 2 ÑAME :ION214MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG4OAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 3 ÑAME :IOK214MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 4 ÑAME :IMA314MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
CH# 5 ÑAME :IAT314MODULE : 180 - 280 VACFEATURES: NONESECURÍTY: O
TYPE :DING4IAC5A DEFAULT : ON ENABLE :NO
WATCHDOG: DISABLEDUSED : O
CH# 6 ÑAME :-ION314MODULE : 24 - 280 VACFEATURES: NONESECURITY: O
TYPE :DOUTG40AC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O .
CH# 7 -ÑAME :IOK314MODULE : 180 - 280 VACFEATURES: NONESECURITY: O
TYPE :DING4IAC5A DEFAULT : LAST ENABLE :YES
WATCHDOG: DISABLEDUSED : O
95

4.2.3 RUTINAS DE CONTROL
Se incluye los diagramas de flujo (charts) y comandos de cada bloque de
programación.
Toda la estrategia de control de iluminación se ha desarrollado cinco diagramas
(charts):
LUXREAD
Lee los valores obtenidos de las fotoceldas y de acuerdo a esto escoge el
modo de funcionamiento automático u horario.
LUXCALC
Realiza el cálculo de los valores promediados de las fotoceldas
CIRCUITOS
Actualiza un cambio de estado de los circuitos de iluminación ya sea por
funcionamiento en modo manual u horario
HORARIO
Este diagrama se encarga de solicitar cambios en el estado de los circuitos de
iluminación cuando el sistema se encuentra en modo horario.
ILUMIN
Este diagrama funciona cuando el sistema se encuentra en modo automático y
se encarga de encender-apagar circuitos de acuerdo a los valores
promediados de iluminación exterior
Los diagramas que deben iniciarse de forma automática han sido incluidos dentro del
diagrama Power Up.
96

Strategy: ILUMINA Chart: LUXREAD
Cíiart Column: 1DIAGRAMA QUE OBTIENE LASLECTURAS DE LOS LUXOttETRÜSE INGRESA A MODO HORARIODE EXISTIR FALLA EH AMBASLECTURAS
El sistema no estaen rfiodo Morar ioX
Esta bien luxometro 2?Obtener Promedio
Almacenar los valores delos sensores de iluminación
Iniciar chart HORARIO ysuspender modo automático
sYT
XS9t_horario
Trabajar soloTfcon Lux
ükey luxpmetro 2?
F
Horarioispender auto
tiraer 1
<Lutf.Dlp
Esta corree;o la Yymedida del luxometro 1 *
Horario
Retardo entreDeKis) mediciones de i seg.
97

(a) Del(ls) Exit To -> (a) ReadL-ux
DELAY (SEC)1.000000
(a) Horario Exit To -> (a) Del(ls)
START CHART
Put Status In
SUSPEND CHART
Put Status In
SUSPEND CHART
Put Status In
DELAY (MSEC)
MOVE STRINGFromTo
MOVE STRINGFromTo
MOVE
MOVE
FromTo
FromTo
HORARIORSLT
ILUMINRSLT
LUXCALCRSLT
100
"FOTOCELDA 1 AVERIADA"STRING1
"FOTOCELDA 2 AVERIADA"STRING2
"PROGRAÍ-ÍA EN MODO HORARIO"STRING3
-1000.000LUX
15TIMER1
(a) Lux(l) Exit To -> (a) Del(ls)
98

MOVE .FromTo
MOVE STRINGFromTo
MOVE STRINGFromTo
LUX1LUXPRV
"FOTOCELDA 2 AVERIADA"STRING2
II I!
STRING1
MOVE STRINGFromTo
u TI
STRING3
(a) Lux(2) Exit To -> (a) Del(ls)
MOVEFromTo
LUX2LUXPRV
MOVE STRINGFromTo
"FOTOCELDA 1 AVERIADA"STRING1
MOVE STRINGFromTo
MOVE STRINGFromTo
M II
STRING2
11 U
STRING3
(a) LuxPrv Exit To -> (a) Del(ls)
DO ADDITION
PlusPut Result In
LUX1LUX2PRVFLT
DO DIVIDE
ByPut Result In
PRVFLT2LUXPRV
MOVE STRINGFrom
99

To
MOVE STRINGFromTo
MOVE STRINGFromTo
STRING1
STRING2
STRING3
(a) LuxRead Exit To -> (a) ReadLux
(a) ReadLux Exit To -> (c) !Modo_Horario
MOVE
MOVE
FromTo
FromTo
II901LUX1
II902LUX2
(a) Set_horario Exit To -> (c) I/uxlrOk
START CHART
Put Status In
SUSPEND CHART
Put Status In
DELAY (MSEC)
MOVE
MOVE
FromTo
FromTo
HORARIORSLT
ILUMINRSLT
100
LUXPRVLUX
15TIMER1
100

(c) !Modo_Horario
NOT?Is
TRUE Exit To -> (c) Luxl: OkFALSE Exit To -> (a) Set^horario
MODOHORARIO
(c) Luxl:0k
WITHIN LIMITS?IsLow limitHigh limit
TRUE Exit To -> (c) Lux2:0kFALSE Exit To -> (c) Loix2: Ok'
LUX1-200.000025000.00
(c)
WITHIN LIMITS?IsLow limitHigh limit
TRUE Exit To -> (a) LuxPrvFALSE Exit To -> (a) Lux(l)
LÜX2-200.000025000.00
(c)
WITHIN LIMITS?IsLow limitHigh limit
TRUE Exit To -> (a) Lux(2)FALSE Exit To -> (a) Horario
LUX2-200 .000025000 .00
101
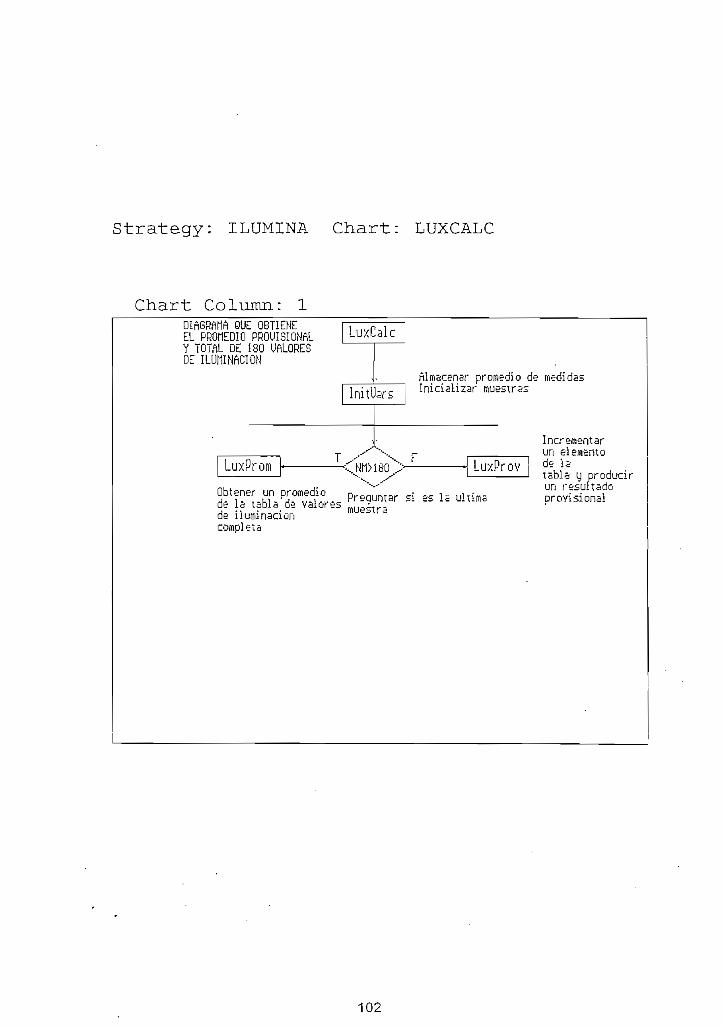
Strategy: ILUMINA Chart: LUXCALC
Chart Column: 1
"á
DiñGRñhñ QUE OBTIENEEL PROMEDIO PROUISIONftLY TOTñL DE 180 UñlQRESDE: ILMINACIÜH
Almacenar promedio de medidasInicializar muestras
LuxPr oy
Obtener un prornediodw Id ubis de Vdlorde iluminacióncompleta
si es la ulUma
Incrementarun elementode latabla y producirun resultadoprovisional
102

(a) InitVars Exit To -> (c) KM>180
MOVEFromTo
LUXPRVLUXTOT
MOVEFromTo
1MUESTRAS
(a) LuxCalc Exit To -> (a) InitVars
(a) LuxProm Exit To -> (c) NM>180
MOVE TO FLOAT TABLEFromIndexTo
SHIFT TABLEShift CountTable
MOVE FROM TABLEIndexFromTo
DO ADDITION
DO SUBTRACTION
MinusPut Result In
DO DIVIDE
ByPut Result In
DELAY (MSEC)
LUXPRVOLUXTABLE
LUXTABLE
179LUXTABLELUXINI
LUXTOTLUXPRVLUXTOT
LUXTOTLUXINILUXTOT
LUXTOT179LUX
103
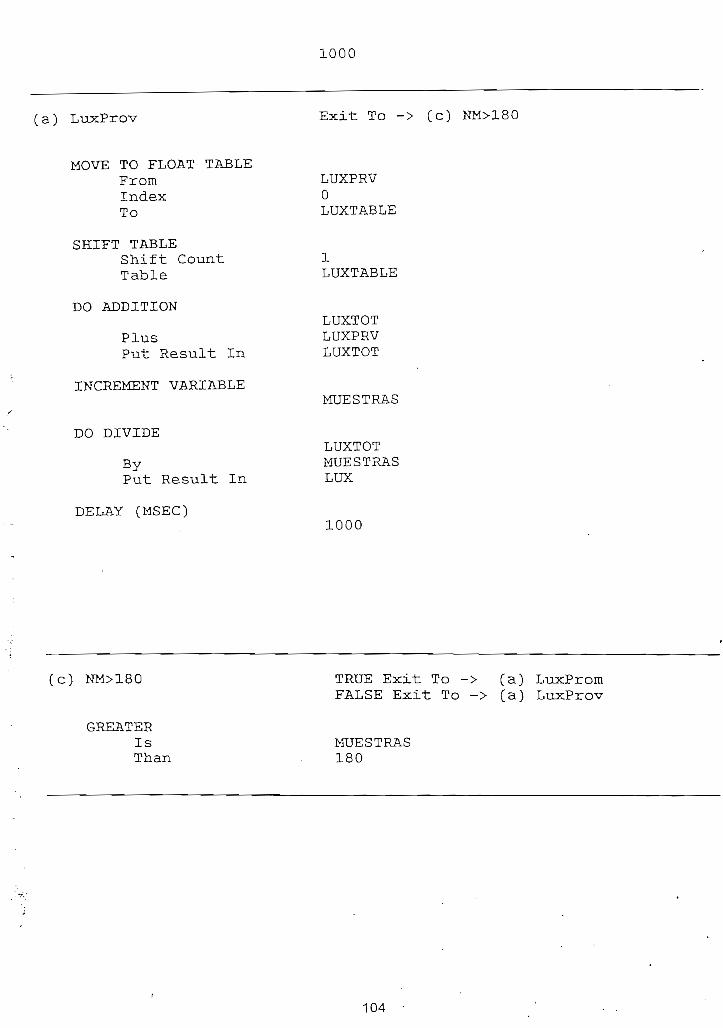
1000
(a) LuxProv Exit To -> (c) NM>180
MOVE TO FLOAT TABLEFromIndexTo
LUXPRVOLUXTABLE
SHIFT TABLEShift CountTabla LUXTABLE
DO ADDITION
PlusPut Result In
INCREMENT VARIABLE
LUXTOTLUXPRVLUXTOT
MUESTRAS
DO DIVIDE
ByPut Result In
DELAY (MSEC)
LUXTOTMUESTRASLUX
1000
(c)
GREATERIsThan
TRUE Exit To -> (a) LuxPromFALSE Exit To -> (a) LuxProv
MUESTRAS180
104
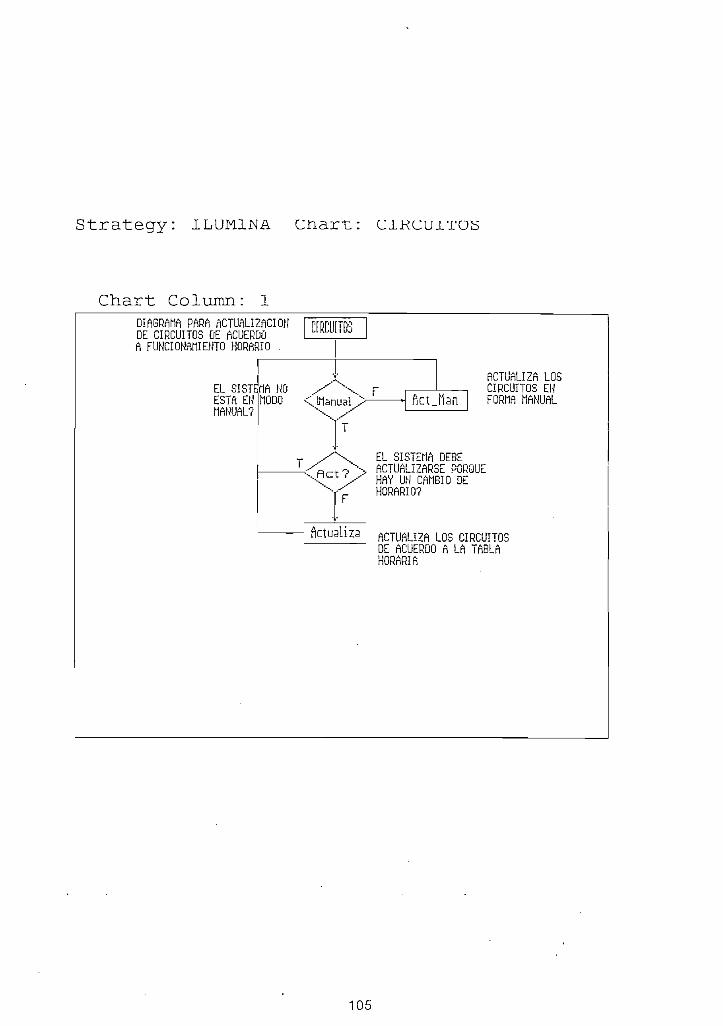
Strategy: ILUMINA cnartí: CIRCUITOS
Chart Column: 1DIAGRAMA PARA ACTUALIZACIÓNDE CIRCUITOS DE ACUERDOA FUNCIONAMIENTO HORARIO .
ELESTA EN
.?
ISTBMA NO x- 'VNODO <J1anual
\T
.xX. ACTUALIZA LOSCIRCUITOS EHFORMA MANUAL
r X\L SISTEMA DEBEX^tVS ACTUALIZARSE PORQUE""<: !X HAY UN CAMBIO DE
HORARIO?F
ACTUALIZA LOS CIRCUITOSDE ACUERDO A LA TABLAHORARIA
105
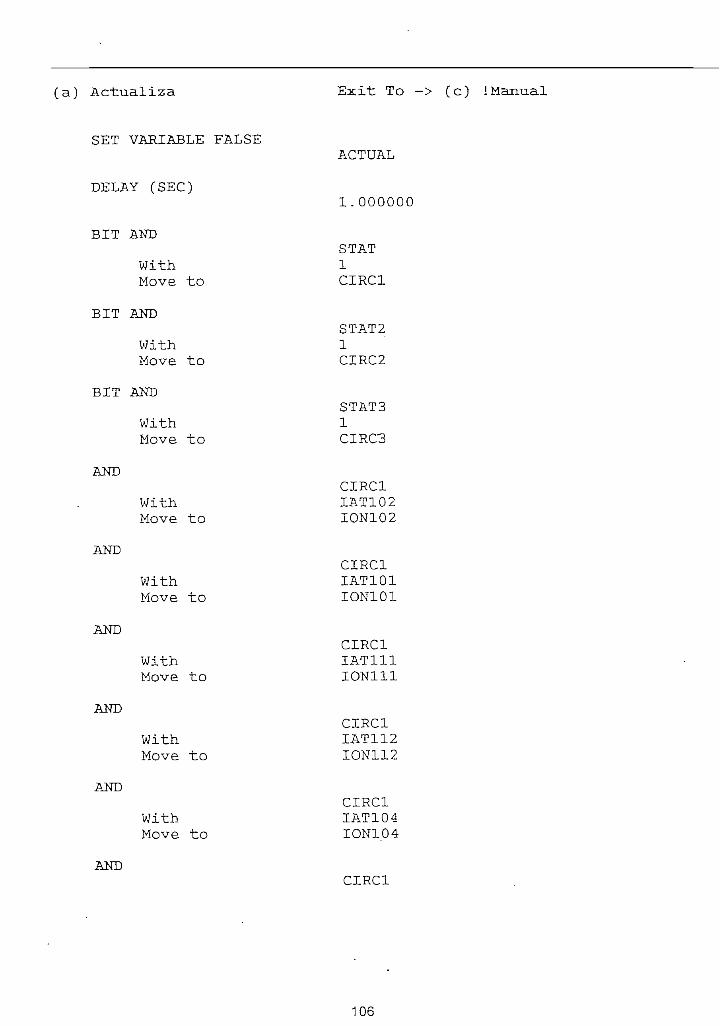
(a) Actualiza Exit To -> (c) ¿Manual
SET VARIABLE FALSE
DELAY (SEC)
BIT AND
WithMove to
BIT AND
WithMove to
BIT AND
WithMove to
ACTUAL
1.000000
STAT1CIRC1
STAT 21CIRC2
STAT31CIRC3
AND
AND
AND
WithMove to
WithMove to
WithMove to
CIRC1IAT102ION102
CIRC1IAT101ION101
CIRC1IATI11ION111
AND
AND
WithMove to
WithMove to
AND
CIRC1IATI12ION112
CIRC1IAT104ION104
CIRC1
106

WithMove to
IAT103IONIOS
AND
WithMove to
CIRC1IAT113ION113
AND
WithMove to
CIRC1IATI14I ONU 4
AND
WithMove to
CIRC2IAT202ION202
AND
WithMove to
CIRC2IAT201ION201
AND
WithMove to
CIRC2IAT212ION212
AND
WithMove to
CIRC2IAT211ION211
AND
WithMove to
CIRC2IAT204ION204
AND
WithMove to
CIRC2IAT203ION203
AND
AND
WithMove to
WithMove to
CIRC2IAT213ION213
CIRC2IAT214ION214
AND
107

AND
AND
AND
AND
AND
AND
AND
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
CIRC3IAT301ION301
CIRC3IAT302ION302
CIRC3IAT312ION312
CIRC3IAT311ION311
CIRC3IAT304ION304
CIRC3IAT303ION303
CIRC3IAT314ION314
CIRC3ÍAT313ION313
(a)" Act_Man Exit To -> (c) 'Manual
DELAY (SEC)1.000000
MOVE STRINGFromTo
AND
With
I I U
STRING3
B011AT111
108
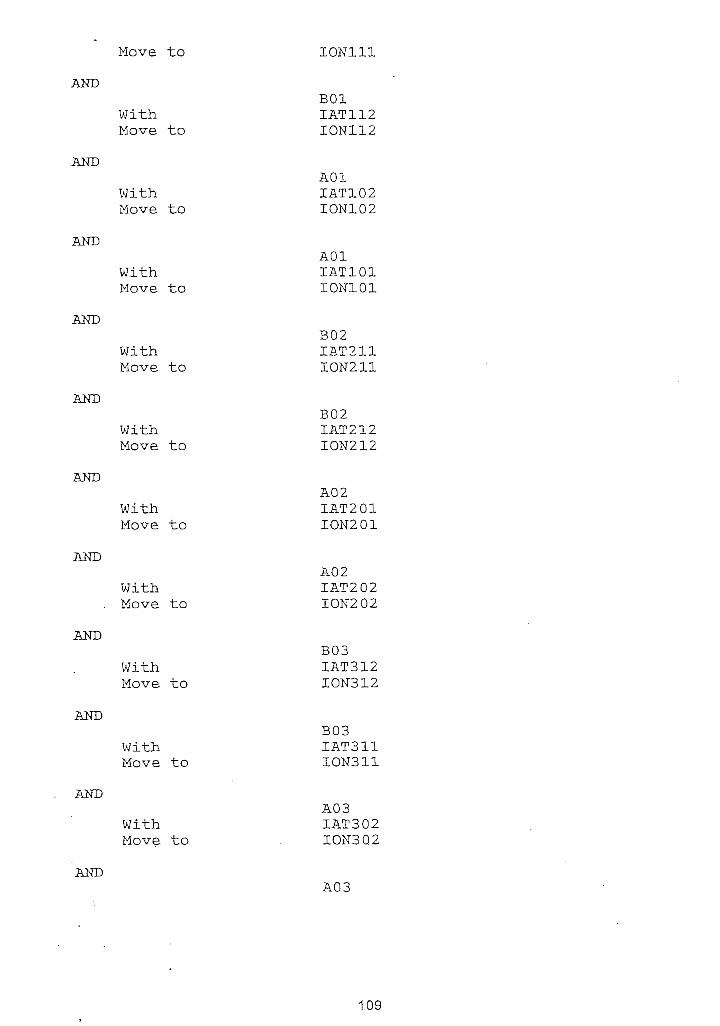
AND
AND
AND
AND
AND
AND
AND
AND
AND
AND
Move to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
AND
ION111
B01IAT112ION112
A01IAT102ION102
A01IAT101ION101
B02IAT211ION211
B02IAT212ION212
A02IAT201ION201
A02IAT202ION202
B03IAT312ION312
B03IAT311ION311
A03IAT302ION3Q2
A03
109

AND
AND
AND
AND
AND
AND
AND
AND
AND
AND
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
WithMove to
IAT301ION301
COIIAT103IONIOS
COIIAT104ION104
C02IAT203ION203
C02IAT204ION204
C03IAT303ION303
C03IAT304ION304
D01IAT113ION113
D01IAT114ION114
D02IAT213ION213
D02IAT214ION214
AND
110

(c) !Manual
NOT?Is
TRUE Exit To -> (c) Act?FALSE Exit To -> (a) Act_Man
MODOMANUAL
(c) Act?
NOT?Is
TRUE Exit To -> (c) !ManualFALSE Exit To -> (a) Actualiza
ACTUAL
111

Strategy: ILUMINA Chart: HORARIO
SiSTEflñ
Obtener el estadode los circuitosssyUTi tabla y psoíractualizar
Inicializar el puntero dela tabla
Obtener el horario de cambiode la tabla
Obtener el tiempo actual
T _-<"
en minutos
Comparar tiempo de tablacon Tiempo actual enminutos
Si el cambio del sistemaa modo horario ha sido .,por falla de fotoceldas **•preguntar cada ciertotiempo si ya no existefalla
'X F
T CONTINUAR CON ELCALCULO DE 1LUÍ1INACION
112

(a) Cambia Exit To -> (a) HoraTabla
MOVE FROM TABLEIndexFromTo
MOVE FROM TABLEIndexFromTo
MOVE FROM TABLEíndexFromTo
SET VARIABLE TRUE
DELAY (SEC)
POINTERSTATUSSTAT
POINTERSTATUS2STAT 2
POINTERSTATUS3STAT 3
ACTUAL
3.000000
(a) Continué Has No Exit
CONTINUÉ CHART
Put Status In
CONTINUÉ CHART
Put Status In
LUXCALCRSLT
ILUMINRSLT
(a) Horario Exit To -> (a) Point=0
(a) HoraTabla Exit To -> (a) Mins
INCREMENT VARIABLE
MOVE FROM TABLE
POINTER
113

IndexFromTo
MOVE FROM TABLEIndexFromTo
DO MULTIPLY
TimesPut Result In
DO ADDITION
PlusPut Result In
POINTERHORHORTAB
POINTERMINMINTAB
HORTAB60HORTAB
HORTABMINTABMINTAB
(a) Mins Exit To -> (c) Min=TaJb
GET HOÜRSMove to
GET MINUTESMove to
DO MULTIPLY
TimesPut Result In
DO ADDITION
PlusPut Result In
HOR
MIN
HOR60HOR
HORMINMIN
(a) Point=0 Exit To -> (a) HoraTabla
MOVEFromTo
OPOINTER
114

(c) Min=Tab
EQUALIsTo
NOT?
TRUE Exit To -> (a) CambiaFALSE Exit To -> (c) Point<16
MINTABMIN
Is
(c) Point<16
LESSIsThan
TRUE Exit To -> (c) TimerlFALSE Exit To -> (a) Point=0
POINTER16
(c) Timerl
TIMER EXPIRED?Is
TRUE Exit To -> (a) ContinuéFALSE Exit To -> (a) HoraTabla
TIMER1
115
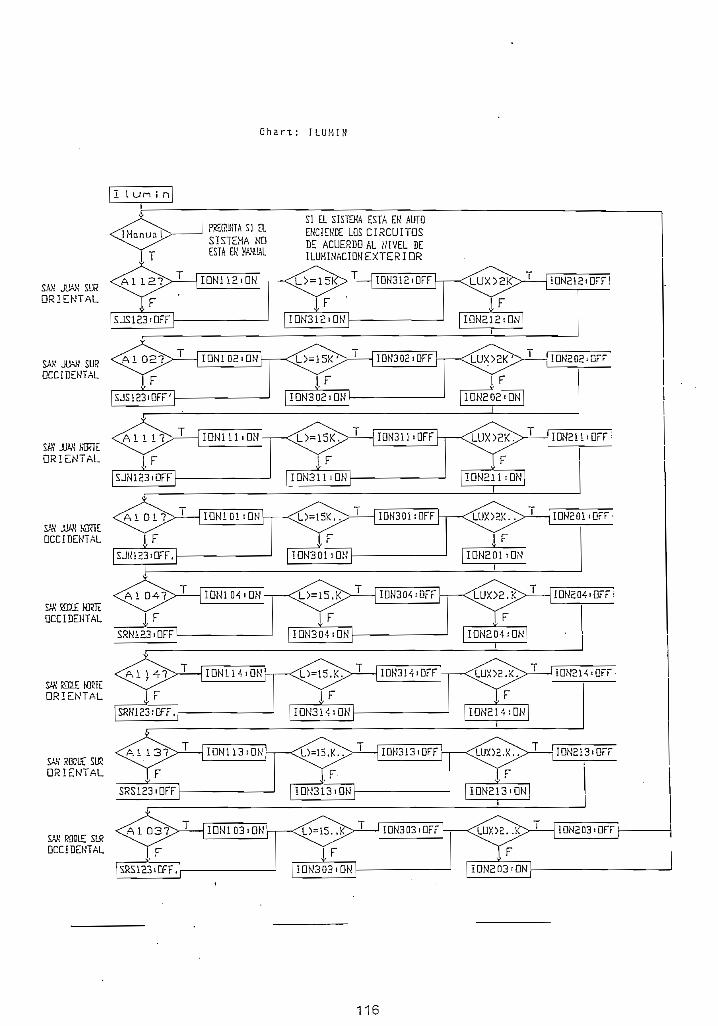
C-ha r t : I L U H I H
SAK JLÍVÍ SURORIENTAL
PKGUXTA S] ELSISTEMA NDESTá EK1 ÍWÜAL
SI £L SISTEMA ESTA EN AUTOENCIENDE LOS CIRCUITOSDE ACUERDO AL NIVEL BEILUMINACIÓN EXTERJDR
Al 1 3 TV-MlDNUlToÑ1
SAÍÍ ROffUtORIENTAL
SAN R00t£ SU?OCCIDENTAL i p
116

(a) Ilumin Exit To -> (c) íManual
(a) ION101:ON Exit To -> (c) L>=15K..
TURN ONION101
(a) ION102:ON Exit To -> (c) L>=15K'
T0RN ONION102
(a) ION103:ON Exit To -> (c) L>=15..K
TURN ONIONIOS
(a) ION104:ON Exit To -> (c) L>=15.K
TURN ONION104
(a) ION111:ON Exit To -> (c) L>=15K.
TURN ONION111
(a) ION112:ON Exit To -> (c) L>=15K
TURN ONION112
117

(a) ION113:ON Exit To -> (c) L>=15.K..
TURN ONION113
(a) ION114:ON Exit To -> (c) L>=15.K.
TURN ONION114
(a) ION201:OFF Exit To -> (c) A104?
TURN OFFION201
(a) ION201:ON Exit To -> (c) A104?
TURN ONION201
(a) ION202:OFF Exit To -> (c) Allí?
TURN OFFION202
(a) ION202:ON Exit To -> (c) Allí?
TURN ONION202
(a) ION203;OFF Exit To -> (c) íManual
TURN OFFION203
118

(a) ION203:ON Exit To -> (c) ! Manual
TURN OKION203
(a) ION204:OFF Exit To -> (c) A114?
TURN OFFION204
(a) ION204:ON Exit To -> (c) A114?
TURK ONION204
(a) IOK211:OFF Exit To -> (c) A101?
OFFION211
(a) ION211:ON Exit To -> (c) A101?
TORN" ONION211
(a) IOK212:OFF Exit To -> (c) A102?
TURN OFFION212
(a) ION"212:ON Exit To -> (c) A102?
119

TURN ONION212
(a) ION213:OFF Exit To -> (c) A103?
TURN OFFION213
(a) ION213-.ON Exit To -> (c) A103?
TURN ONION213
(a) ION214:OFF Exit To -> (c) A113?
TURN OFFION214
(a) ION214:ON Exit To -> (c) A113?
TURN ONION214
(a) ION301:OFF Exit To -> (c) I/ux>2K..
TURN OFFION301
(a) ION301:ON Exit To -> (c) Lnx>2K._
TURN ONION301
(a) ION302:OFF Exit To -> (c) Lux>2K'
120

TURN OFFION302
(a) ION302:ON Exit To -> (c) I/U302K'
TURN ONION302
(a) I01sT303:OFF Exit To -> (c) Liix>2..K
TÜRK OFFION303
(a) ION303:ON Exit To -> (c) Lux>2..K
TURK ONION303
(a) ION304:OFF Exit To -> (c) Lux>2.K
TURK OFFION304
(a) ION304:ON Exit To -> (c) Lux>2.K
TURK ONION304
(a) ION311:OFF Exit To -> (c) Lux>2K.
TURK OFFION311
121
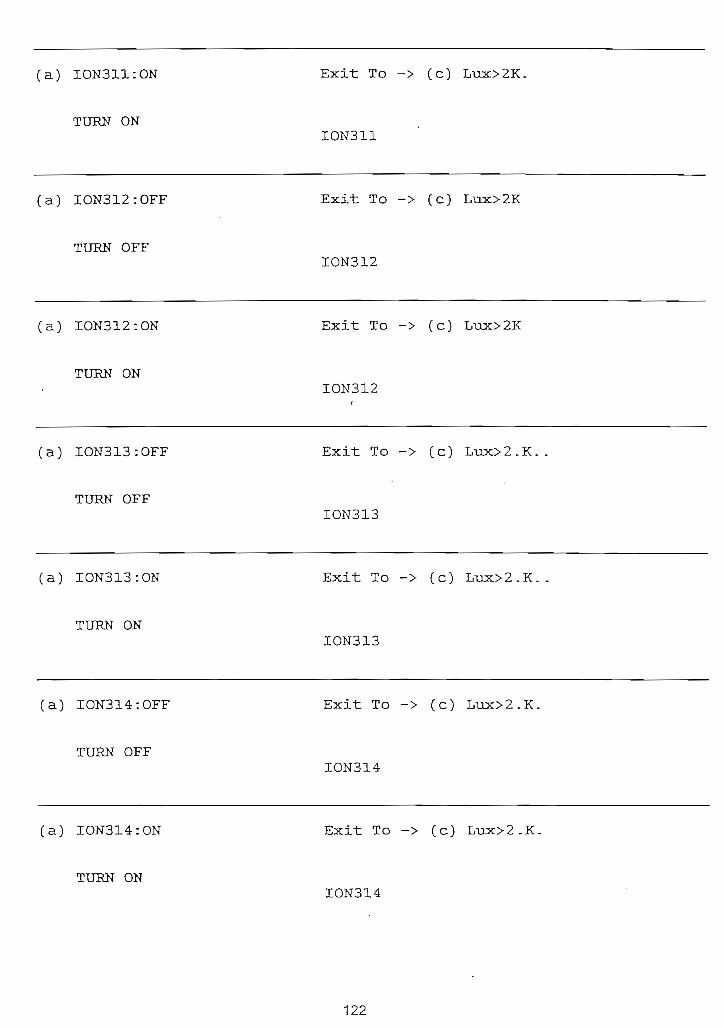
(a) ION311:ON Exit To -> (c) Lux>2K.
TURN ONION311
(a) ION312:OFF Exit To -> (c) Lux>2K
TURN OFFION312
(a) ION312:ON Exit To -> (c) I/ax>2K
TUKN ONION312
(a) ION313:OFF Exit To -> (c) Lux>2.K..
TURN OFFION313
(a) ION313:ON Exit To -> (c) l/ux>2.K._
TURN ONION313
(a) ION314:OFF Exit To -> (c) Lux>2.K.
TURN OFFION314
(a) ION314:ON Exit To -> (c) Lux>2.K_
TURN ONION314
122

(a) SJN123:OFF Exit To -> (c) L>=15K.
TURN OFFION111
(a) SJN123:OFF. Exit To -> (c) L>=15K..
TURK OFFION101
(a) SJS123:OFF Exit To -> (c) L>=15K
TURN OFFION112
(a) SJS123:OFF' Exit To -> (c) L>=15K'
OFFION102
(a) SRN123:OFF Exit To -> (c) L>=15.K
TURN OFFIONIO4
(a) SRN123:OFF. Exit To -> (c) L>=15.K.
TURK OFFION114
(a) SRS123:OFF Exit To -> (c) L>=15-K._
123

(c) !Manual
NOT?
NOT?
Is
Is
TRUE Exit To -> (c) A112?FALSE Exit To -> (c) IManual
MODOMANUAL
MODOHORARIO
(c) A101?
ON?Is
TRUE Exit To -> (a) IONIO1:ONFALSE Exit To -> (a) SJN123:OFF
IAT101
(c) A102?
ON?Is
TRUE Exit To -> (a) ION102:ONFALSE Exit To -> (a) SJS123:OFF'
IAT102
(c) A103?
ON?Is
TRUE Exit To -> (a) ION103:ONFALSE Exit To -> (a) SRS123:OFF,
IATIO3
(c) A104?
ON?Is
TRUE Exit To -> (a) ION104:ONFALSE Exit To -> (a) SRN123:OFF
IAT104
(c)'Allí?
ON?Is
TRUE Exit To -> (a) JONllliONFALSE Exit To -> (a) SJN123:OFF
IAT111
124

TURN OFFION113
(a) SRS123:OFF. Exit To -> (c) L>=15..K
TURN OFFION103
125

(c) A112?
ON?Is
TRUE Exit To -> (a) ION112:ONFALSE Exit To -> (a) SJS123:OFF
IAT112
(c) A113?
ON?Is
TRUE Exit To -> (a) IO2ST113 :ONFALSE Exit To -> (a) SRS123:OFF
IAT113
(c) Al14?
ON?Is
TRUE Exit To -> (a) ION114:ONFALSE Exit To -> (a) SRtfl23:OFF,
IAT114
(c) L>=15. -K
GREATER OR EQUALIsTo
EQUALIsTo
TRUE Exit To -> (a) ION303:ONFALSE Exit To -> [a) ION303:OFF
LUXLIMITUP
IAT303-1
(c)
GREATER OR EQUALIsTo
EQUALIsTo
TRUE Exit To -> (a) IOK304:ONFALSE Exit To -> (a) ION304:OFF
LUXLIMITUP
IAT304-1
(c) L>=15.K.
GREATER OR EQUAL
TRUE Exit To ~> (a) ION314:ONFALSE Exit To -> (a) ION314:OFF
* 126

IsTo
EQUALIsTo
LUXLIMITUP
IAT314-1
(c) L>=15.K.
GREATER OR EQUALIsTo
EQUALIsTo
TRUE Exit To -> (a)FALSE Exit To -> (a)
LUXLIMITUP
IAT313-1
ION313:ONION313:OFF
(c) L>=15K
GREATER OR EQUALIsTo
EQUALIsTo
TRUE Exit To -> (a)FALSE Exit To -> (a)
LUXLIMITUP
IAT312J.
ION312:ONION312:OFF
(c) L>=15K' TRUE Exit To ->FALSE Exit To ->
(a) ION302:ON(a) ION302:OFF
GREATER OR EQUALIsTo
EQUALIsTo
LUXLIMITUP
IAT302-1
(c) L>=15K.
GREATER OR EQUALIsTo
TRUE Exit To -> (a) ION311:ONFALSE Exit To -> (a) ION311:OFF
LUXLIMITUP
127

EQUALIsTo
IAT311
(c)
GREATER OR EQUALIsTo
EQUALIsTo
TRUE Exit To ->FALSE Exit To ->
LUXLIMITUP
IAT301-1
(a) ION301:ON(a) ION301:OFF
(c) Lux>2..K
GREATERIsThan
EQUALIsTo
TRUE Exit To -> (a) ION203:ONFALSE Exit To -> (a) IOK203:OFF
LUXLIMITDOWN
IAT203-1
(c) Lux>2.K
GREATERIsThan
TRUE Exit To -> (a) ION204:ONFALSE Exit To -> (a) ION204:OFF
LUXLIMITDOWN
EQUALIsTo
IAT204-1
(c) Lux>2.K.
GREATERIsThan
EQUAL
TRUE Exit To -> (a) ION214:ONFALSE Exit To -> (a) ION214:OFF
LUXLIMITDOWN
128

IsTo
IAT214-1
(c) Lux>2.K..
GREATERIsThan
EQUALIsTo
TRUE Exit To -> (a) ION213:ONFALSE Exit To -> (a) ION213:OFF
LUXLIMITDOWN
IAT213-1
(c) Lux>2K
GREATERIsThan
TRUE Exit To -> (a) ION212:ONFALSE Exit To -> (a) ION212:OFF
LUXLIMITDOWN
EQUALIsTo
IAT212-1
(c) Lux>2K'
GREATERIsThan
EQUALIsTo
TRUE Exit To -> (a) ION202:ONFALSE Exit To -> (a) ION202:OFF
LUXLIMITDOWN
IAT202-1
(c)
GREATERIsThan
EQUALIsTo
TRUE Exit To -> (a) ION211:ONFALSE Exit To -> (a) ION211:OFF
LUXLIMITDOWN
IAT211-1
129

(c) Lux>2K..
GREATERIsThan
EQÜALIsTo
TRUE Exit To -> (a) ION201:ONFALSE Exit To -> (a) ION201:OFF
LUXLIMITDOWN
IAT201
130
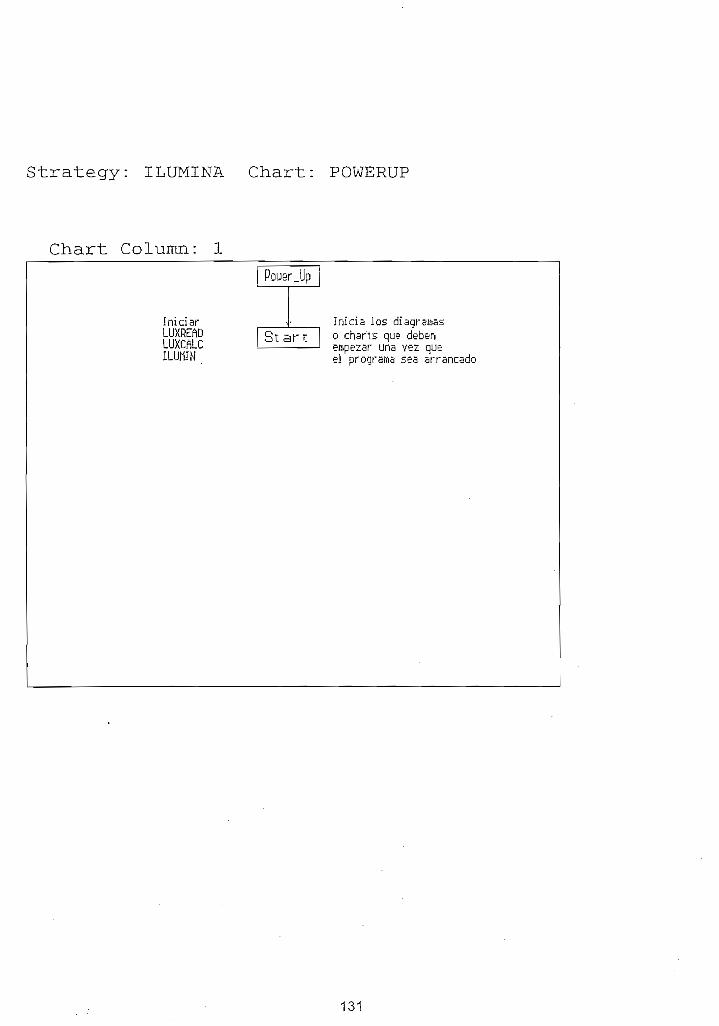
Strategy: ILUMINA Chart: POWERUP
Chart Column: 1
IniciarLUXREñDLUXCñLCILUHIN
Inicia los diagramaso cnarts que debenempezar una vez queel programa sea arrancado
131

(a) Powerüp Exit To -> (a) Start
(a) Start Has No Exit
SET HOST PRIORITYToOn Fort
DELAY (MSEC)
START HOST TASK (BIKARY)On PortPut Status In
START CHART
Put Status In
START CHART
Put Status In
START CHART
Put Status In
START CHART
Put Status In
START CHART
Put Status In
START CHART
Put Status In
START CHART
Put Status In
START CHART
Put Status In
10O
100
1RSLT
ASPASRSLT
CIRCUITOSRSLT
LUXCALCRSLT
ILUMINRSLT
LUXREADRSLT
LIMITRSLT
COREADRSLT
COCALCRSLT
132
4.3-APLICACIÓN DE LA INTERFASE PARAGON TNT
Paragon TNT es un software para supervisión, moniíoreo y control de procesos. Esta
desarrollado bajo una tecnología cliente-servídor.
Los servidores son subsistemas del programa que adquieren, generan y almacenan
datos:
Procesador E/S (PIÓ Server)
Es un subsistema servidor que maneja las comunicaciones entre Paragon TNT y el
coníroiador Opto 22
Estrategia Continua (CS Server)
Es un subsistema servidor dentro del cuai se pueden manejar algoritmos de control.
Manejadorde Datos (DM Server)
Este subsistema maneja datos históricos o en tiempo real que son adquiridos o
generados por oíros susbsistemas
Los clientes son subsistemas que despliegan o presentan datos:
Operador de Interface
Es un subsistema cliente que provee los displays en tiempo real e históricos para los
datos del proceso generados por otros subsistemas
Reportes
Subsistema cliente que permite generar una amplia variedad de reportes con los datos
generados o adquiridos por otros subsistemas.
Recetas
Este subsistema permite ¡eer o escribir un conjunto de instrucciones mientras ¡a
.aplicación este corriendo.
133

DDE (Intercambio Dinámico de Datos)
Permite integrar a cualquier programa que soporta el protocolo DDE
Interface de Ingeniería
Este subsistema cliente permite un diagnóstico en línea y sirve para optimizar la
aplicación.
Paragon TNT está diseñado como un sistema modular que está paríicionado en forma
lógica en funciones que realizan actividades específicas. Estas funciones están
divididas en elementos con nombres y dirección para satisfacer el problema de
requerimientos.
La aplicación desarrollada ha sido implementada para funcionar de ¡a siguiente
manera:
Existe una primera pantalla con un diagrama representativo del estado de los circuitos
en cada galería. Asociados con cada circuito están:
• Un número qué relaciona su identificación en planos
• El color del circuito indica los siguientes estados:
circuito apagado ( negro )
circuito encendido en automático ( amarillo )
circuito encendido en manual desde tablero ( amarillo -gris )
circuito en falla ( gris )
• Existe un recuadro para desplegar el nivel de iluminación exterior
• Se indica el estado ( manual-automático-horario ) bajo el cual el sistema de
iluminación está funcionando
• Adicionalmente y en el lado derecho se presentan las siguientes opciones :
GRÁFICOS Presenta de forma gráfica los datos de
iluminación obtenidos en tiempo real.
134

•^4
HORARIO Permite ingresar a configurar el sistema de
iluminación para funcionamiento en modo
horario.
MANUAL Ingresa a la pantalla de configuración de los
circuitos en forma manual.
AUTO Regresa al sistema a modo automático
ALARMA Ingresa a la pantalla de alarmas
EVENTOS Se ingresa a la pantalla de acciones realizadas
por el operador.
h*h
IREG Despliega la información obtenida de los
sensores de iluminación en forma gráfica en un
registro interactivo, el cual es totalmente
configurare en línea. Permite obtener datos
históricos.
<*
3f, -:-l
LIMITES Permite cambiar los límites (dentro de un rango
predefinido ) para el encendido-apagado de los
circuitos cuando se encuentra en modo
automático.
A continuación se presentan los gráficos de las principales pantallas desarrolladas en
el subsistema Operador de Interface,
135

•i .'
i ÍH
' .
«.' i,
i t
',
.! ..
'« i1.
,"
¡. '
! ,.
i,1."
»!¿
'
.. '"
V
V..
. .'
,,'
' ',
. ",:
, ",
' '
._",
.ái
-,.!
"',
. «
" 'M
Í <"
', 1
J
.,!',
!,,
',,"
„!,"
, ¡-
,,,1
,
i,
¡,
'!,,,,',
', "
'!''
'„,!
,'',',
¿'v
K
,' .
,'
'!,' ,.'.
, ,
,„
! .,
' ,'
'
",
!«
,'
'."
?j
¡¡
....
«.Í
J 8
,,'
'„,
•' i,
-,»
V '
1'
í '
• ii'«
¡ M
i,
!'
Min
ia'
' 'ii
'i
ri'i
i'Ü
í il
t'"i
!
i.1
.,.'
1-
,V i
' "
'
' •«
i>t
i ,!
i M
, "
i
^'1'
'
• 't
,¡'
'" !
i .«
Vl
í"
i -'
1*
1-
Hi>i
¡t<.!
. i
' "
¡ '
i 1
*1
i i"
i'
' '
*J »
i i
'"
'!
r
' J
' i ¡
i '
i~i'
! r
i1 !
i i
i ,
, !
'i
. ?
i :
, i
i '
11
, i.!
,i
í m
'i ";
' t ,
s i'
, i
, t
,1
l.'i
' 1
1,
i 11
it
¡ 11
V
m,V
,.,
i '¡
..'í
1 lí
".''l
'íi1
, ,
^".
iMlV
.i'v /'
!" ^
>'f
!',M
E'
' '
'''i
'1'
''''
'»!
¡.Í'
V'
i'!
,;"1
'!1 !"
!'
''.
"','
»',
'''"
mí."
' "-
!"•'
"."
Vl"
i^
ti
,'i,'
!"'¡ i ,
y
'i
~m
—¡
—
•—=-
==—
-—•
' -•
• -
——
——
"
~
—=
*
—
'—
'..'--
, ''
¡
i j
i
i
ii
'» ' 'j
u"'
t '
'ít'iií!
!1 i
1 ' i iíi
! !í
flu
s T
RE
M
UN
ICIP
IO
DE
Q
U'l
T O
'|.f-
:L"
[ *>
>-**
**™
*'>-
" I
!
OM
PLE
JO D
E T
ÚN
ELE
S D
E LA
CIU
DA
D D
E Q
UIT
O
"'' -
1
CLA
VE
DE
AC
CE
SO
SA
LID
AD
E U
SU
AR
IO
•i"
' í
¡ •
r
I ,
I „
!
1 I
I!
**.-
,
I 1
! 1 -
I
" I
!
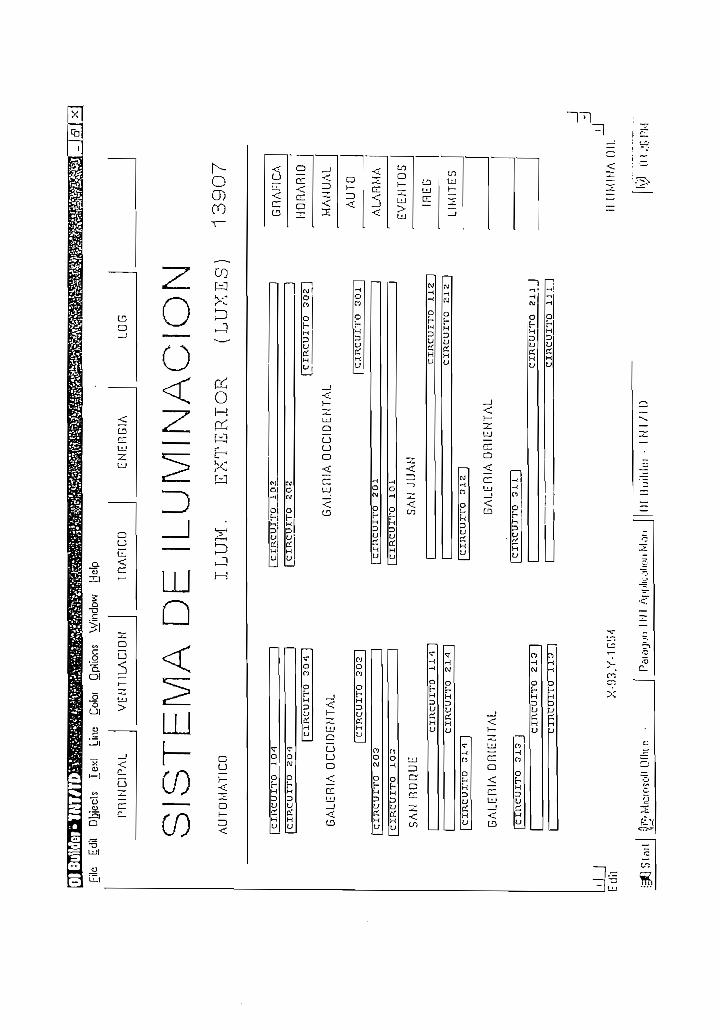
File
E
dil
Obj
ecls
Je
xl
Une
C
olot
Q
plio
ns
Win
dow
H
elp
PR
INC
IPA
L V
EN
TIL
AC
IÓN
T
RA
FIC
OE
ME
RG
ÍALU
G
SIS
TE
MA
D
E I
LU
MIN
AC
IÓN
AU
TO
MÁ
TIC
OIL
UM
. E
XT
ER
IOR
(L
UX
ES
) 13907
¡ _CIRCUITO J-O'T
(CIRCUITO 201
[CIRCUITO 3Q1
GA
LE
RÍA
OC
CID
EN
TA
L
| CIRCUITO 302
[CIR
CU
ITO
2
03
| CIRCUITO 10
SAN R
OQUE
CIRCUITO 111 |
CIRCUITO
| C
IRC
UIT
O
_3
ij?_
J
GA
LE
RÍA
O
RIE
NT
AL
| C
IRC
UIT
O
313~
] CIRCUITO 213
]Sln
il|
fi1--
viic
iosü
l
I C
IRC
UIT
O
10
2
|~ci
RC
urr
o
aoj~
.ZJ
[CIRCUITO 302]
GA
LE
RÍA
OC
CID
EN
TA
L
CIRCUITO 301
| CIRCUITO 201
1 CIRCUITO
101
SAN JUAN
CIRCUITO 112
| CIRCUITO 312
GA
LE
RÍA
O
RIE
NT
AL
|CIRCUITO 311 |
CIR
CU
ITO
2
1J
|
CIR
CU
ITO
1 J 1
|
X-Í
Í3.Y
-ÍG
Ü-1
'áh'j'j
'.'ii
IMI
AP
I
GR
ÁF
ICA
HO
RA
RIO
MA
NU
AL
AU
TO
AL
AR
MA
EV
EN
TO
S
IRE
G
J
II [
(MIN
A O
lí.
'1
IH.'G
PI-,
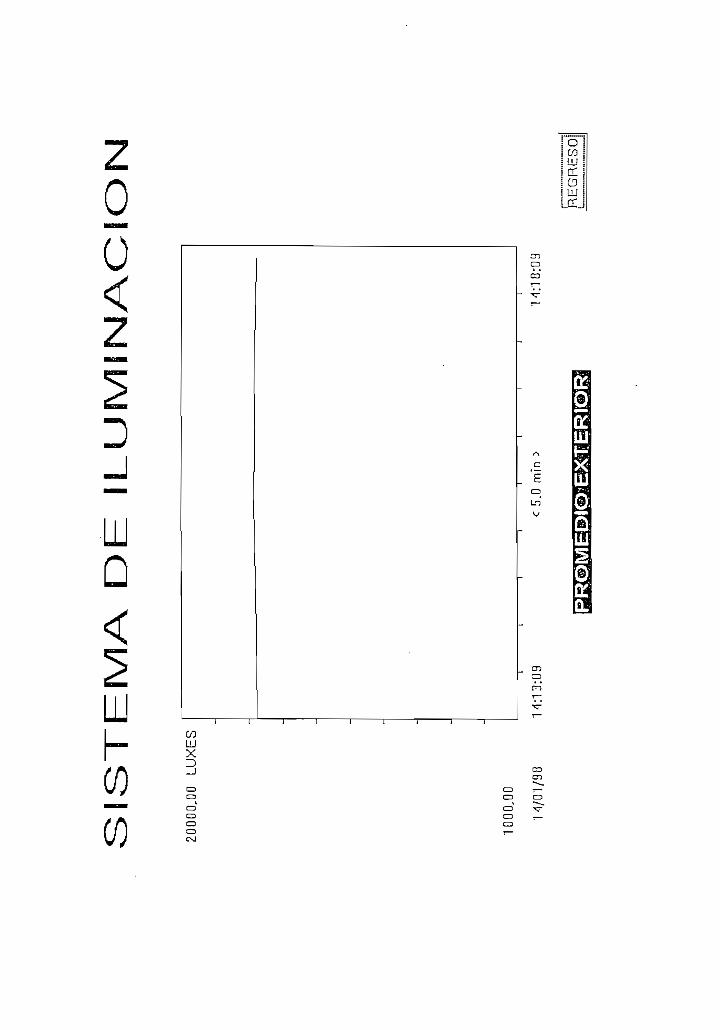
SIS
TE
MA
D
E IL
UM
SN
AC
SO
2000
0,00
LU
XE
S
1000
,00
14
/01
/90
1-1:
13:0
9c
5.0
min
>14
:18:
09
REG
RESO
!
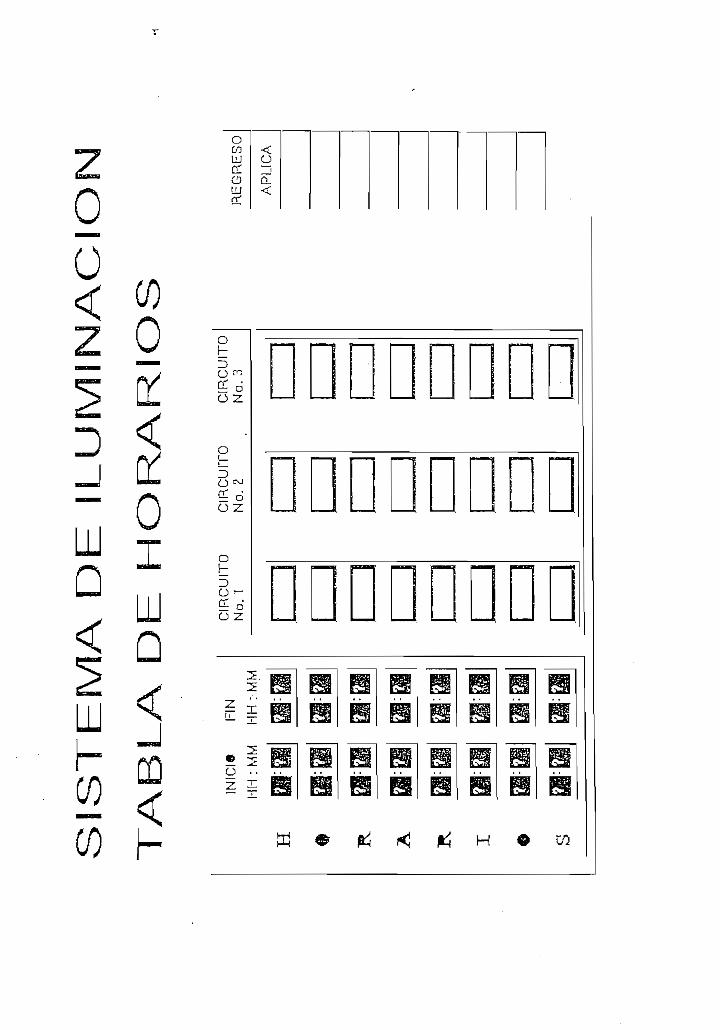
fc'
SIS
TE
MA
D
E 1
LU
MIN
AC
IO
TA
BL
A D
E H
OR
AR
IOS
INIC
IO
FIN
HH
: M
M
I-1H
: MM
H R A R I
CIR
CU
ITO
No.
1C
IRC
UIT
ON
o. 2
CIR
CU
ITO
No.
3R
EG
RE
SO
AP
LIC
A
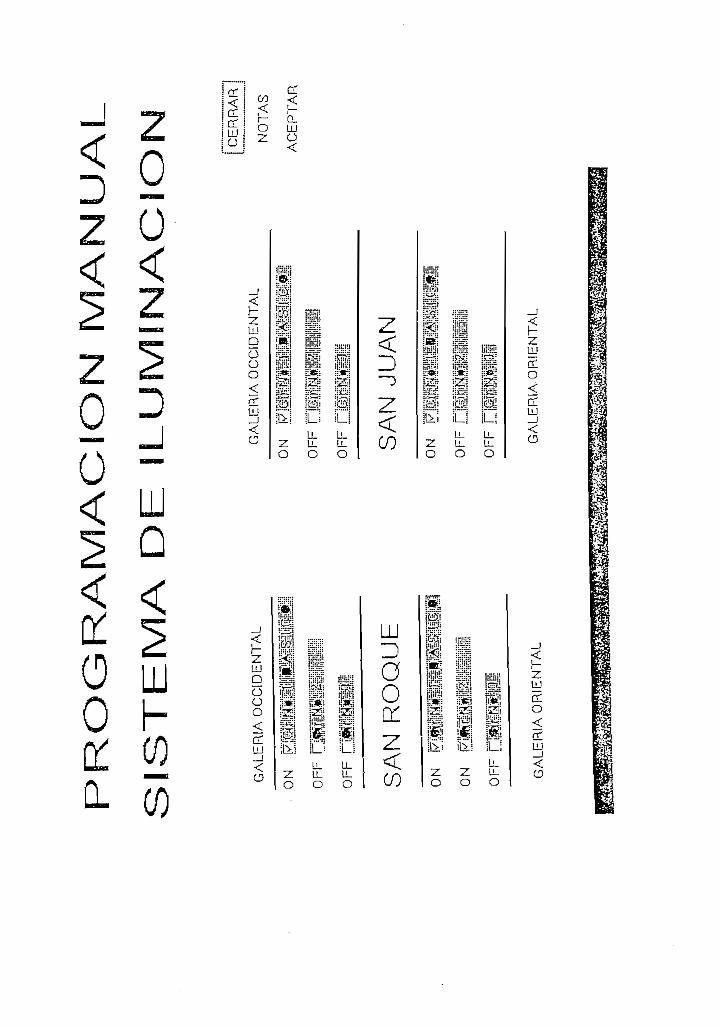
PR
OG
RA
MA
CIÓ
N M
AN
UA
L
SIS
TE
MA
D
E IL
UM
INA
CIO
GA
LER
ÍA O
CC
IDE
NT
AL
o N E
illilllilffllllll
OFF nlisillllll
OFF nlIlüSI
SA
N R
OQ
UE
o N EillSIlIlIliaillii
ON OF
F nllllill
GA
LER
ÍA O
RIE
NT
AL
GA
LE
RÍA
OC
CID
EN
TA
L
O N
F
IQf P
N «
;»1
'HJP
• A-e ü
^
OF
F
OFF S
AN
JU
AN
ON OFF
OFF
[CE
RR
AR
NOTAS
ACEPTAR
GA
LER
ÍA O
RIE
NT
AL

¿S
-'SZ
'H
Ú
00
7!.
¿B-B
2-V I
CO
OG
/LO
/kL
xrr
OA
JL|O
JV
5.- CONCLUSIONES Y RECOMENDACIONES
La técnica de adquirir datos y controlar un sistema mediante inteligencia distribuida ha
probado sus ventajas respecto de los sistemas tradicionales mediante PLC's.
El uso de este tipo de control nos ha dado una gran versatilidad en cuanto a la
distribución de entradas/salidas. Se puede adaptar los módulos de E/S a los sensores
o actuadores que se disponga escogiéndolos de una amplia gama
El control se ha vuelto simple, ya que ha permitido delegar tareas a las unidades de
E/S remotas; para nuestro caso las lecturas de los luxómeíros han sido linealizadas en
una unidad de E/S análoga sin cargar a! procesador central con esta tarea. El hecho
de que ¡as unidades de E/S tengan un coprocesador le permite al sistema Opto 22
manejar trabajos como Idealizaciones, conteos, etc.; sin incrementar la carga en la
red.
Además la programación mediante diagramas, característica exclusiva de los
sistemas Opto 22, nos ha permitido una mayor velocidad de programación, mejor
comprensión y documentación mas eníendible y posibilidad de realizar cambios con
mucha mayor facilidad.
Al contrario de los programas realizados en lógica ladder los cuales hemos visto que
son difíciles de escribir, documentar, entender y realizar cambios.
El sistema de hardware opto 22 presenta una gran versatilidad en la adquisición de
datos; ya que ¡a diversidad de módulos o puntos E/S amplían la capacidad de
diversificar el tipo de sensores o actuadores que se utilizen en un sistema.
Compatibles con el mismo controlador Opto 22 , se ha desarrollado últimamente
unidades de E/S ( llamadas por el fabricante B3000), que permiten mezclar módulos
análogos y digitales.
142

En cuanto al programa Cyrano vemos que sus diagramas de flujo son fácilmente
reutilizables y los nombres de variables y/o puntos de E/S pueden en cualquier
momento ser renombrados si el programador lo requiere, sin tener que cambiar
ninguna parte del programa.
A la hora de proyectar un sistema de adquisición de datos mediante: PLCs,
arquitectura DCS, o inteligencia distribuida, consideramos muy importante tomar en
cuenta los siguientes factores:
• Los sistemas deben proveer conectividad y ser capaces de operar usando
diversidad de hardware y software , es decir debe proveer la capacidad de
implementar nuevos esquemas a un mínimo costo de integración.
• El sistema debe ser simple para el personal que va a realizar la operación y
mantenimiento.
• Debe presentar la suficiente confiabilidad en el sentido de prevenir que la falla de
. un único dispositivo cause la falla total del sistema.
• De requerirse, el sistema debe ser capaz de manejarse usando programas de
¡nterface gráfico y desde múltiples estaciones.
Todos estos requerimientos-son cumplidos por los sistemas opto 22, de tal forma que
se vuelven una alternativa atractiva a considerar en el desarrollo de cualquier sistema
SCADA que se requiera ¡mplementar.
Como un anexo se presenta el costo en US dolares de los principales componentes
en un sistema de adquisición de datos Opto 22
Al comparar costos de las diferentes arquitecturas, hay que tomar en cuenta que este
debe involucrar aspectos tales como;
• Valor de compra del equipo
• Cosío de Instalación
143

• Tiempo de Programación
• Inversión de Mantenimiento
• Facilidad de Actualizaciones
• Cosío de operación
Si consideramos todos estos parámetros, un sistema Opto 22 será siempre mas
barato que un sistema de PLC's y lógica ladder; particularmente en el costo de
programar, actualizar y mantener el sistema es mucho menor.
Concluyendo diremos que un. sistema Opto 22 realiza funciones de alto nivel y tiene
una capacidad mayor que un sistema mediante PLCs de precio equivalente.
En el proyecto ¡mplementado en los Túneles de Quito, el controlador Opto 22 utilizado
maneja alrededor de 600 puntos entre digitales y análogos trabajando a una velocidad
de comunicación de 115.000 baudios. Su capacidad le permite operar la totalidad de
los sistemas, como son:
-Sistema de iluminación
Controla el encendido y apagado de circuitos de iluminación alimentados desde cuatro
cámaras de distribución ubicadas a lo largo de aproximadamente 2 Km
-Comanda siete sistemas de Transferencias de Carga
-Control del Generador de emergencia y niveles de combustible de los tanques diario y
mensual
• Realiza el control On-Off de 36 ventiladores de 20 HP
De acuerdo a los niveles de monoxido de carbono de 8 sensores análogos, 4-20 mA,
dos por cada galería, se enciende o apagan los ventiladores correspondientes.
144

-Realiza conteo de vehículos y presenta velocidades promedio en las cuatro galerías
-Comanda el sistema de señalización interna y externa de los túneles
Todo esto es controlado por dos computadores trabajando sobre el mismo
controlador, es decir se utiliza la capacidad "multimaster" del equipo.
En el presente trabajo hemos presentado solamente una sola aplicación, como es el
control del sistema de iluminación, ya que resulta prácticamente repetitivo en cuanto a
programación el desarrollo de! control de los oíros sistemas.
Como todo sistema creemos que es suceptible de ser mejorado, pero estas mejoras
pueden ser realizadas de forma rápida, prácticamente sin necesidad de parar los
programas. Hay que tomar en cuenta que a pesar de que se controlan en todos los
sistemas alrededor de 500 puntos, nos queda una capacidad de control disponible de
mas de 7500 puntos, los cuales se puede aprovecharen sistemas adicionales.
145

ANEXOS

1 1
Número Parte
CYRANO 200
G4AD8G4AD25G4AD3G4AD5G4AD6
G4AD24
ANEXO No. 1
LISTA DE PRECIOS EQUIPO OPTO 22DESCRIPCIÓN
SoftwareSoftware para procesadores Mistic 200
Módulos de entrada análogosmódulo de entrada termocupla tipo Kmódulo de entrada 0-100 V. AC/DCmódulo de entrada de 4-20 mAmódulo de entrada termocupla tipo Jmódulo de entrada 0 a 5 VDCmódulo de entrada termocupla tipo B
G4AD7 ¡módulo de entrada 0 a 10 VDCG4AD22G4AD19G4AD18G4AD17G4AD16G4AD13G4AD12G4AD9
G4AD11
G4D16R
G4A8R
G4DA6G4DA8G4DA9G4DA7G4DA5G4DA4G4DA10G4DA3
G41AC5G4IAC5AG4IDC5
G41DC5KG4ÍDC5GG4IDC5D
módulo de entrada 0 a 1 VDCmódulo de entrada termocupla tipo Emódulo de entrada termocupla tipo Tmódulo de entrada termocupla tipo Rmódulo de entrada 0-5 Amp. AC/DCmódulo de entrada 0 a 100 mV.módulo de entrada -10 a 10 VDC.módulo de entrada 0 a 50 mV.módulo de entrada -5 a 5 VDC.
P.V.P.U.S. dolares
1.995,00
125,00125,00100,00125,00117,00125,00117,00117,00125,00125,00125,00167,00125,00117,00125,00117,00
iUnidad base para montaje de módulos digitalesUnidad multífunción digital remota 16 canales
Unidad base para montaje de módulos análogosUnidad multifunción análoga remota 8 canales
Módulos de salida análogosMódulo de salida -5 a 5 VDCMódulo de salida 0 a 20 mASalida DC proporcional al tiempoMódulo de salida -10 a 10 VDCMódulo de salida 0 a 10 VDCMódulo de salida 0 a 5 VDCSalida AC proporcional al tiempo
615,00
615,00
117,00117,00100,00117,00117,00117,00100,00
Módulo de salida 4 a 20 mA \0
Módulos de entrada digitalesMódulo de entrada 90-140 VACMódulo de entrada 180-280 VACMódulo de entrada 10-32 VDCMódulo de entrada 2.5-16 VDCMódulo de entrada 35-60 VDCMódulo de entrada 2.5-28 VDC
9,5010,509,5013,009,508,50

Número Parte
G4LC32G4LS32ISA
DESCRIPCIÓN
ControladoresControlador clásico OPTO 22Controlador ISA OPTO 22
| Módulos de salida digitalesG40AC5 j Módulo de salida 1 2-1 40 VAC
G40AC5AG40AC5A5
Módulo de salida 24-280 VACMódulo de salida 24-280 VAC, nc
G40DC5A |Móduio de salida 5-200 VDCG40DC5R
G4ODC5R5G40DC5
Módulo de salida reed relay
P.V.P.U.S. dolares
2.500,001.295,00
9,5010,5010,5015,4010,50
Módulo de salida reed relay, nc | 10,50Módulo de salida 5-60 VDC
FuentesG4PS24XB ¡Fuente para 7 unidades 220VACG4PS24XAG4PS245AG4PS245B
Fuente para 7 unidades 120VACFuente para 7 unid.+controlador 120VACFuente para 7 unid.+controlador220VAC
Paneles para montaje de equiposG4RPANEL |Kií panel de ensamblaje
9,50
345,00345,00450,00450,00
290,00
*•

ANEXO No. 2PANEL OPTO 22
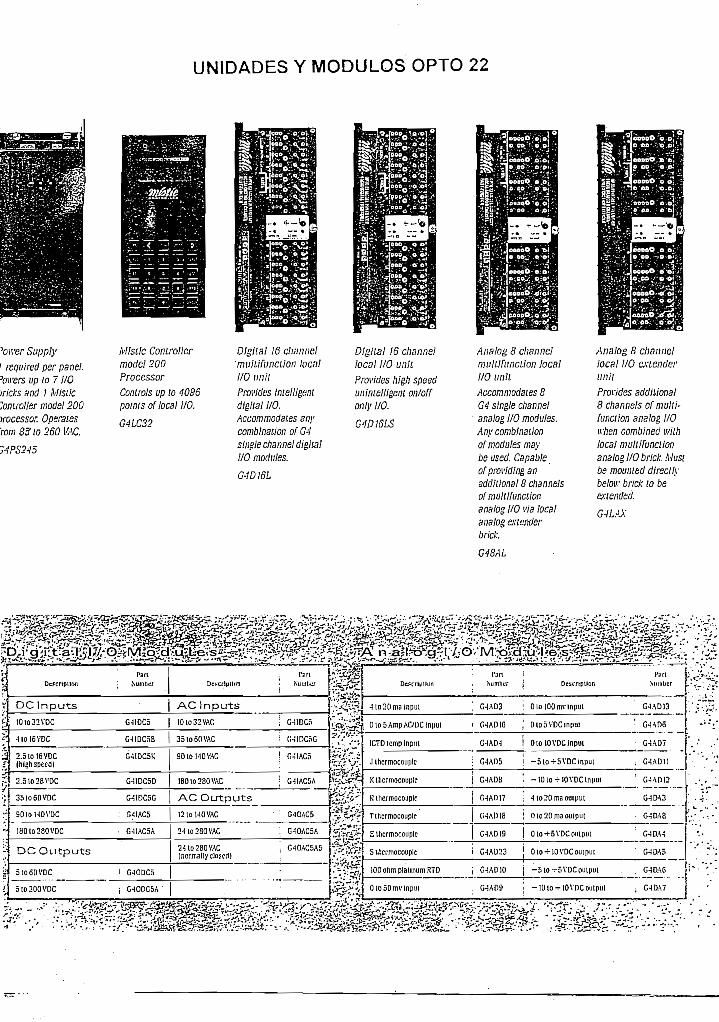
Power Supply
1 required per panel.Powers up lo 7 i/Obricks and 1 MisiicController model 200processor. Opéralesfrom 83 to 260 VAC.
G4PS245
Mistlc Controllermodel 200Processor
Controls up lo 4096points oí local !/0.
G4LC32
Dígita! 16 clmnnel'miilt.iFuncUon ¡ocal1/0 uní!
Provides iníelligenldigital 1/0.Accommodal.es anycombinación ofG4single channel digital1/0 modules.
GJD16L
Digital 16 channelloca! !¡0 unlt
Provides hign speedunintelligenL on/offonly 1/0.
G4D16LS
Anaiog 8 ctianne!multifiinction loca!110 unil
Accommodaies 8G4 single channelanalog 1/0 modules.Any combinationof modules maybeused. Capableoíproviding anadditional 8 channelsof muhlfunclionanaiog ¡/O vía loca!analog extenderbrick.
G48AL
8 channellocal 110 extenderunil
Provides addiiiondl8 channels oí muiti-function analog ¡10\vhen combined \vithlocal niuliifunciionanalog i/O brick. Mustbe monmed direcilyfie/oír brtck 10 beextended.
G-iLAX
-!í
'$£$-í%?$B¿'$?$,¡ÉíEfeííür
w¿£&*
"felÉl
ParíDescrlpllon j fiumüer
DC Inputs
101032VDC G4IDC5
41016VDC G4IDC5B
2.5W16VDC C41DC5K(hígtispeedl
i 2.51028VDC G4IDC5D
35I06DVDC G4IDC5G
90IOI40VDC 1 G4IAC5
180W280VDC • G41AC5A
DCOutputs
5to60VDC 1 G40DC5
510200VDC | G40DC5A '
Uescrlpllira ' Numliur f' fiírí, '
AC 1 n p uts f.víSi
10 lo 32 WC G-JIDCf) ^V l
35 lo 60 VAC «-HDC5G [" '"J^
90 10 140 VAC G41AC5 fcí:f-f
180 lo 280 VAC G-ÍIACDA fe¿¿^
ACOutputs fái£¿
12 lo HO VAC G40AC5 f H*1?
24 lo 280 VAC G40AC5A \%£*£¿.
24 lo 280 VAC G40AG5A5 ¡Í S^V[normallyciosecl] !•"..;. -'U-
Rí§' ' '',*VJ— -í
1' ' " • • "••" '" IL • — - ••
Dcírriultun
4 lo2Üma ¡npui
OloSAmpAC/DCtnpui
ICTDlempiripiil
J ihermocouple
K ilicrrnocouple
R ihermocoiiplc
T Uicrniocouple
1 E ifiermocouple
S ifiermocouple
lOOoíimplatlnumRTD
OíoSOmvinpm
Tan
G-IAD3
(34AD1G
G4AD4
G4AD5
G4ADK
C4AD17
G4AU1B
G4ADI9
G-1AÜ23
G4AD10
G-ÍAD9
Piin iDescripllon Niittilicr
OlolOOmvlnpm G4AD13
OlooVDCmpuI • G4^DB
OlolOVDCinpui G4AD? j. __._ __. -|
-5lo-í-5VDCinpu[ , G4AD11
-iOlo-MOVDClnpm : Ü4AD12
4to20maoUIpm G4D«
OíoSOmaouipui . G-ÍDA8
Olo-f5VOCoulpul ' G-1DA4
Olo^lOVDCouipui ' G-SDA5
~5lo-r5VOCouipui . . G4DA6
-lülo-r-lOVDCoulpul •. G4DA7
Top Related