







Idiomas
Páginas
Jurídico

Comenzado el lunes, 27 de octubre de 2014, 09:15
Completado el lunes, 27 de octubre de 2014, 09:16
Tiempo empleado 30 segundos
Puntos 3/15
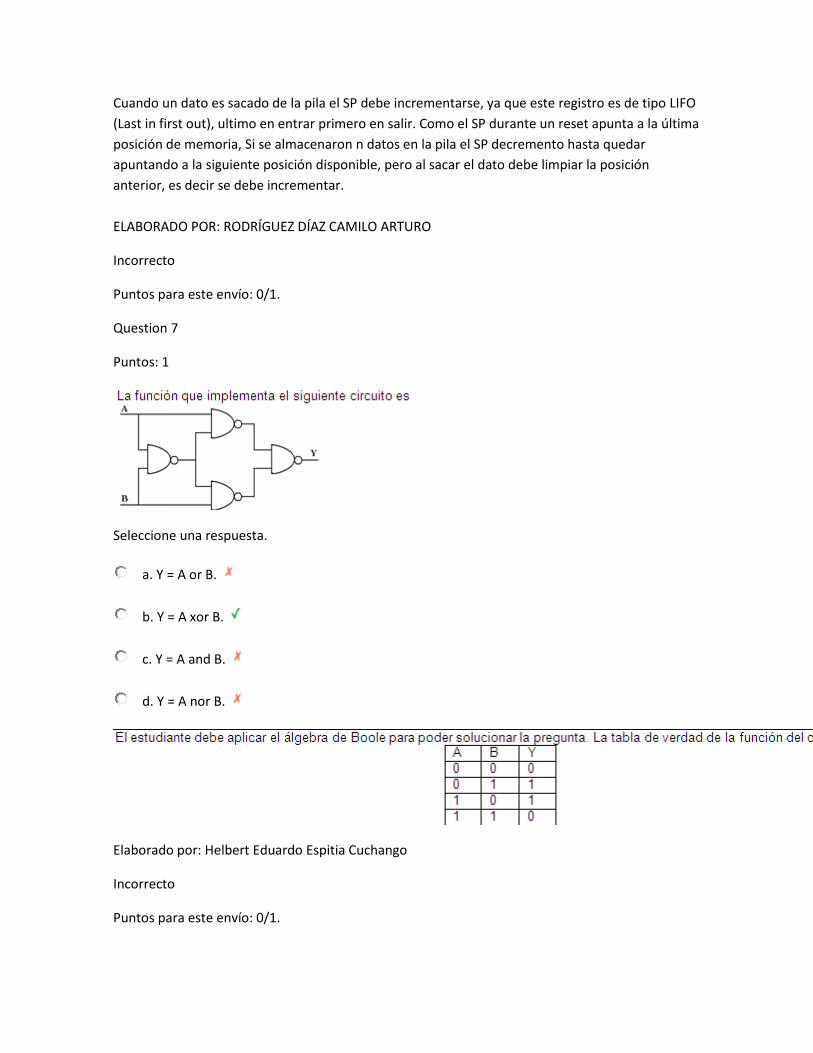
Calificación 1 de un máximo de 5 (20%)
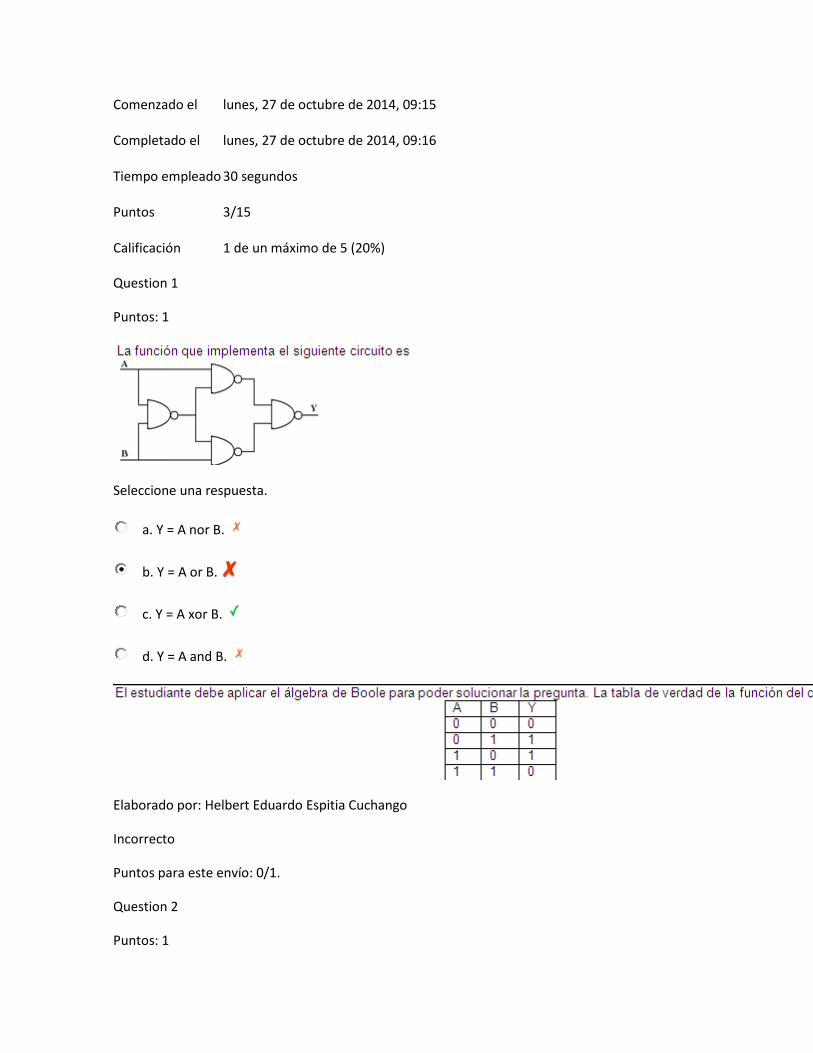
Question 1
Puntos: 1
Seleccione una respuesta.
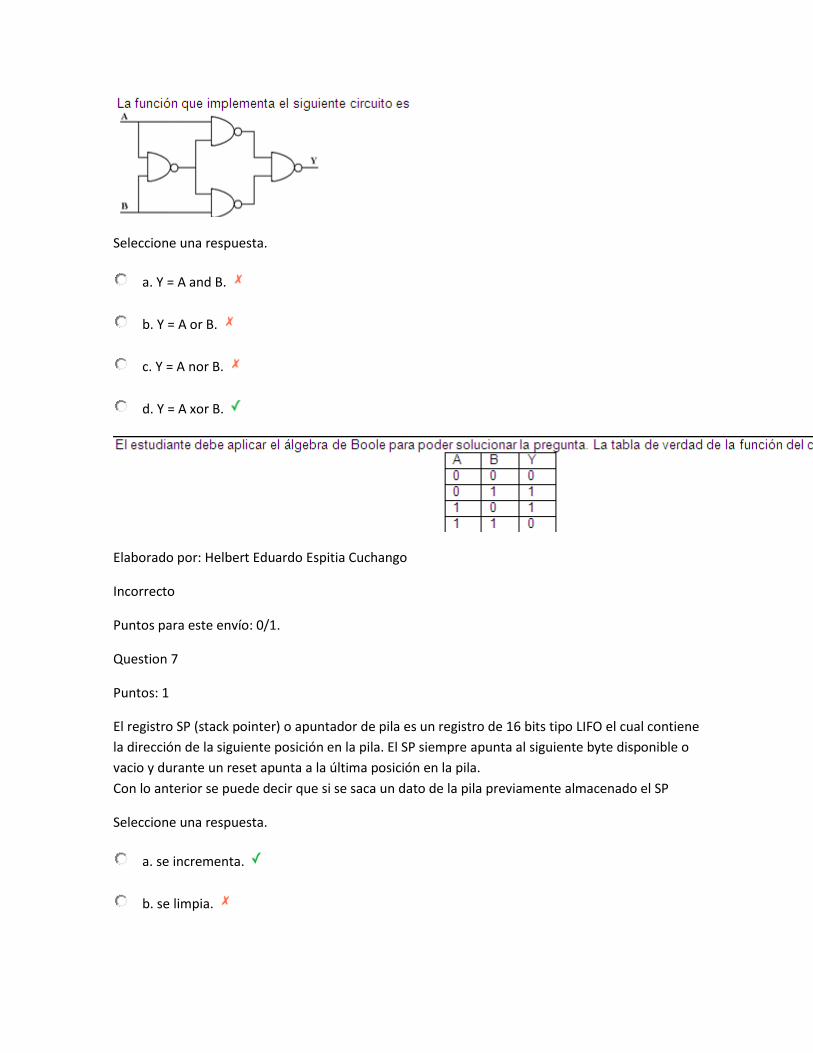
a. Y = A nor B.
b. Y = A or B.
c. Y = A xor B.
d. Y = A and B.
Elaborado por: Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 2
Puntos: 1
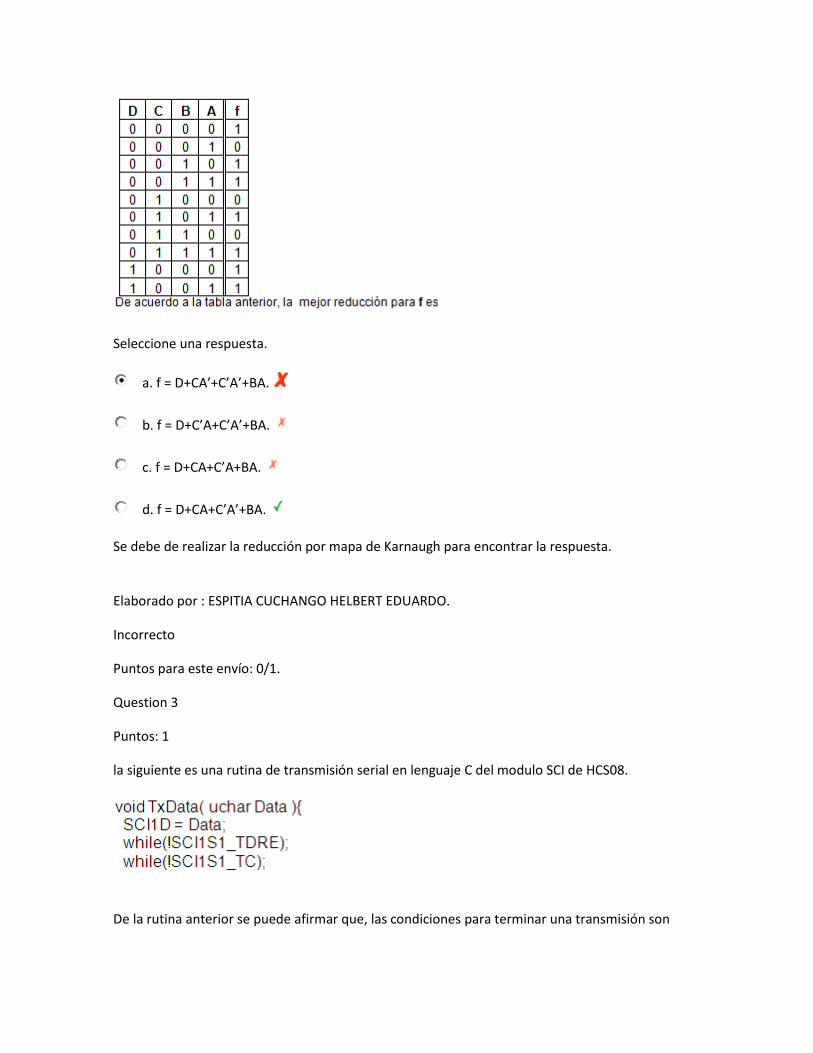
Seleccione una respuesta.
a. f = D+CA’+C’A’+BA.
b. f = D+C’A+C’A’+BA.
c. f = D+CA+C’A+BA.
d. f = D+CA+C’A’+BA.
Se debe de realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por : ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 3
Puntos: 1
la siguiente es una rutina de transmisión serial en lenguaje C del modulo SCI de HCS08.
De la rutina anterior se puede afirmar que, las condiciones para terminar una transmisión son
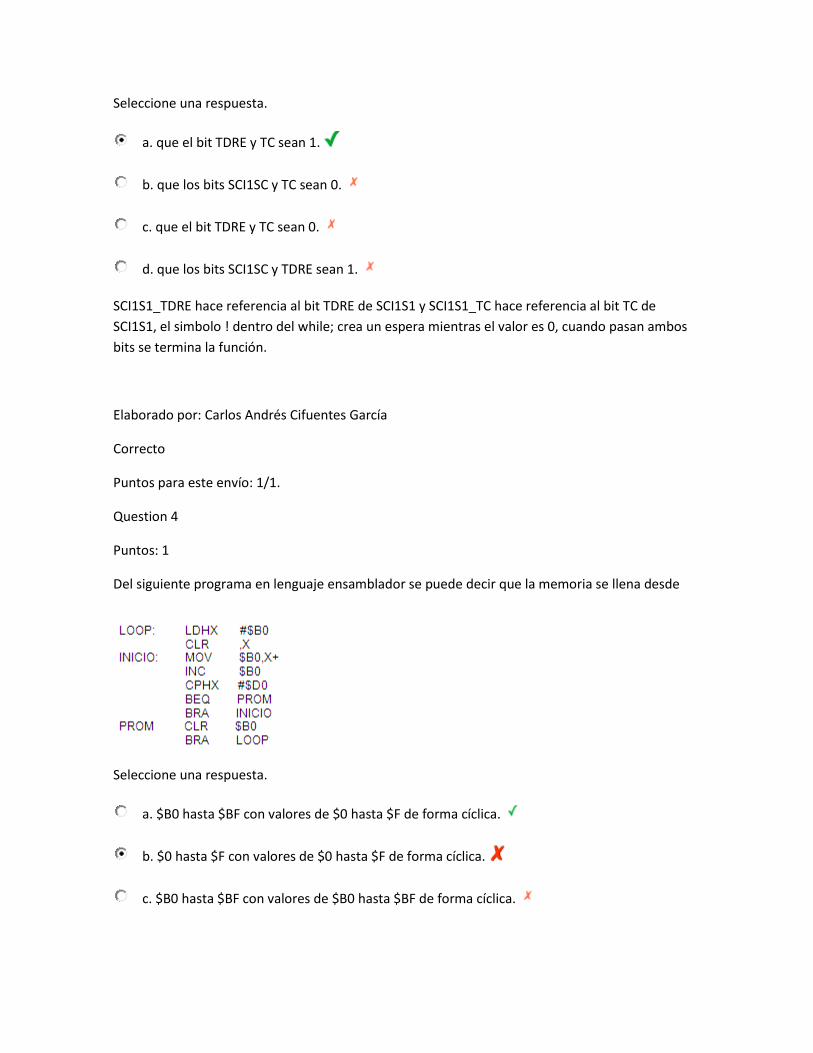
Seleccione una respuesta.
a. que el bit TDRE y TC sean 1.
b. que los bits SCI1SC y TC sean 0.
c. que el bit TDRE y TC sean 0.
d. que los bits SCI1SC y TDRE sean 1.
SCI1S1_TDRE hace referencia al bit TDRE de SCI1S1 y SCI1S1_TC hace referencia al bit TC de
SCI1S1, el simbolo ! dentro del while; crea un espera mientras el valor es 0, cuando pasan ambos
bits se termina la función.
Elaborado por: Carlos Andrés Cifuentes García
Correcto
Puntos para este envío: 1/1.
Question 4
Puntos: 1
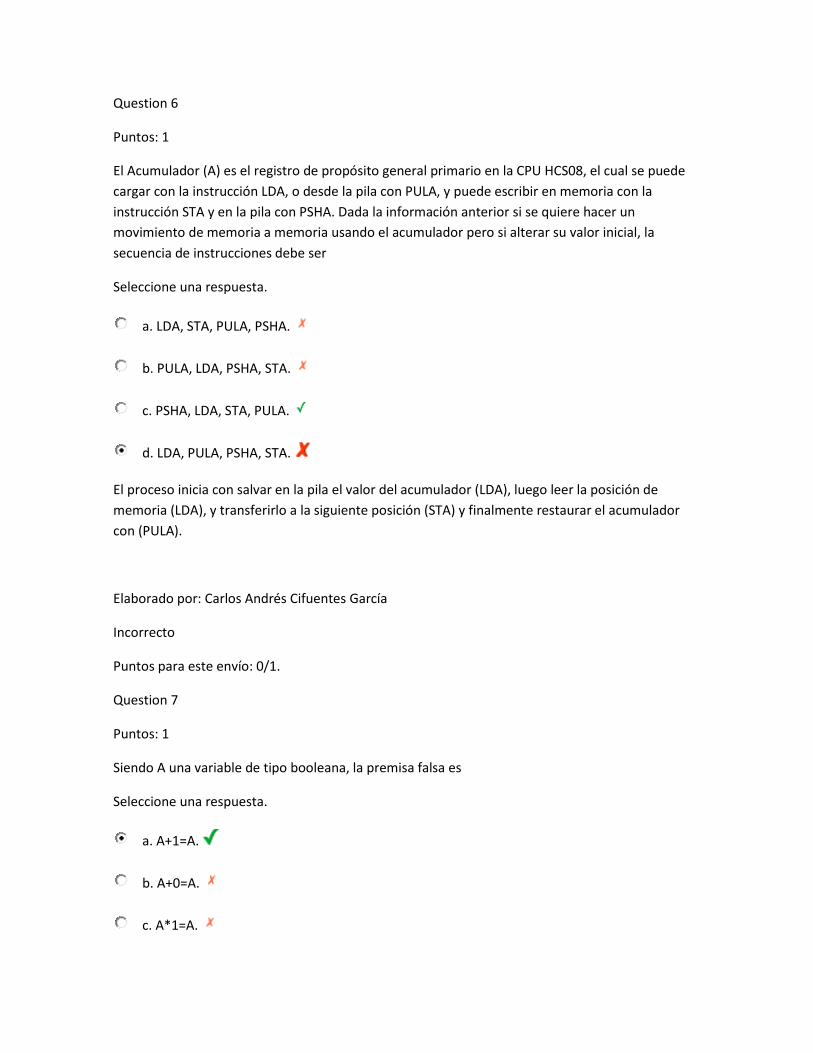
Del siguiente programa en lenguaje ensamblador se puede decir que la memoria se llena desde
Seleccione una respuesta.
a. $B0 hasta $BF con valores de $0 hasta $F de forma cíclica.
b. $0 hasta $F con valores de $0 hasta $F de forma cíclica.
c. $B0 hasta $BF con valores de $B0 hasta $BF de forma cíclica.

d. $0 hasta $F con valores de $B0 hasta $BF de forma cíclica.
El registro indexado se carga con el valor de $B0 y siguiente a esto se limpia esta dirección, luego
se mueve el valor actual de $B0 a $B0 y queda apuntado H:X a la siguiente posición de memoria.
Siguiente a esto se incrementa el valor de $B0 con (1,2,3……) y se compara el registro indexado
con el valor $D0 si es igual salta a la etiqueta PROM donde se limpia la posición de memoria $D0 y
se repite el ciclo completo, y si no repite el ciclo desde la etiqueta INICIO, con lo que la memoria se
llenara con $0 en $D0 hasta $F en $DF .
ELABORADO POR: RODRÍGUEZ DÍAZ CAMILO ARTURO
Incorrecto
Puntos para este envío: 0/1.
Question 5
Puntos: 1
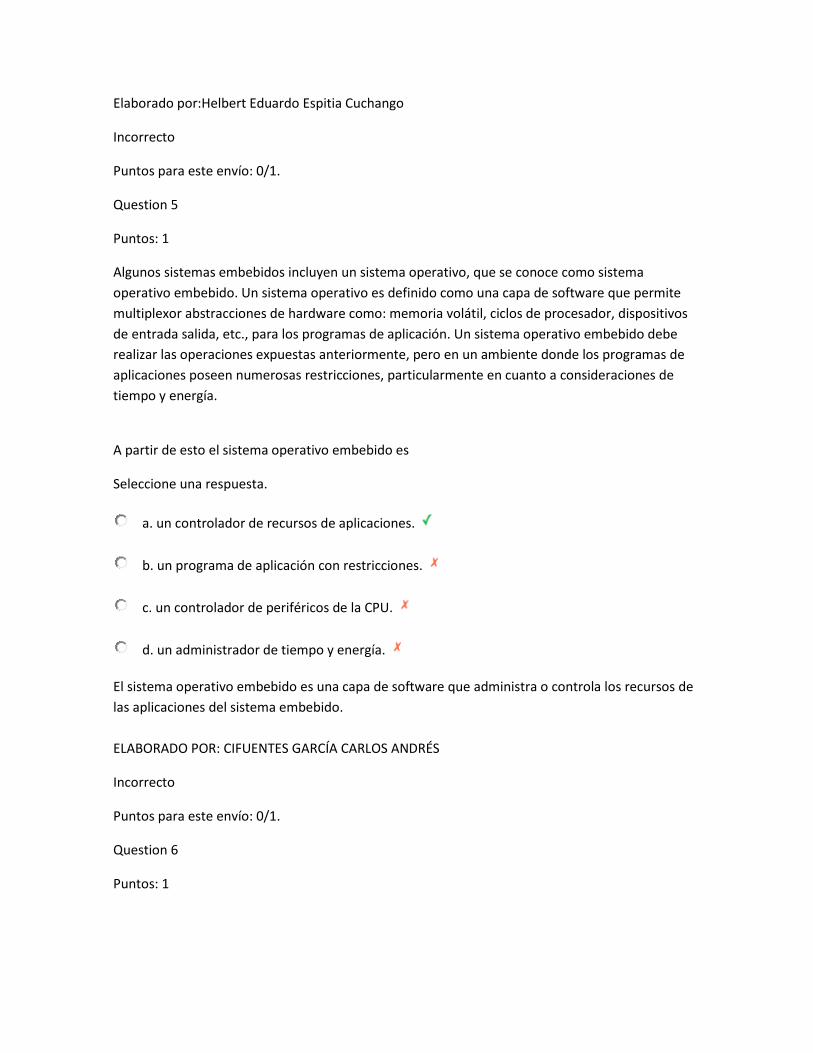
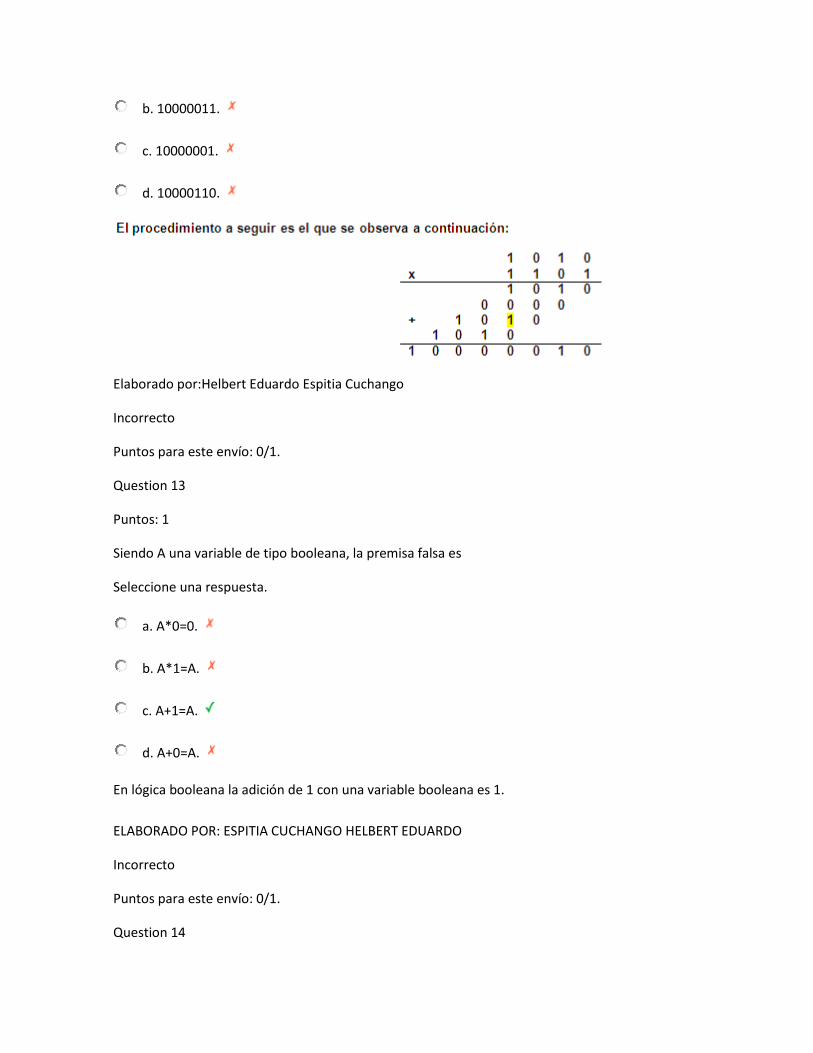
El resultado de realizar la multiplicación de los números binarios 1010 y 1101 es
Seleccione una respuesta.
a. 10000010.
b. 10000001.
c. 10000110.
d. 10000011.
Elaborado por:Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 6
Puntos: 1
El Acumulador (A) es el registro de propósito general primario en la CPU HCS08, el cual se puede
cargar con la instrucción LDA, o desde la pila con PULA, y puede escribir en memoria con la
instrucción STA y en la pila con PSHA. Dada la información anterior si se quiere hacer un
movimiento de memoria a memoria usando el acumulador pero si alterar su valor inicial, la
secuencia de instrucciones debe ser
Seleccione una respuesta.
a. LDA, STA, PULA, PSHA.
b. PULA, LDA, PSHA, STA.
c. PSHA, LDA, STA, PULA.
d. LDA, PULA, PSHA, STA.
El proceso inicia con salvar en la pila el valor del acumulador (LDA), luego leer la posición de
memoria (LDA), y transferirlo a la siguiente posición (STA) y finalmente restaurar el acumulador
con (PULA).
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 7
Puntos: 1
Siendo A una variable de tipo booleana, la premisa falsa es
Seleccione una respuesta.
a. A+1=A.
b. A+0=A.
c. A*1=A.

d. A*0=0.
En lógica booleana la adición de 1 con una variable booleana es 1.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Correcto
Puntos para este envío: 1/1.
Question 8
Puntos: 1
En la arquitectura del procesador el elemento que tiene dominio directo sobre las direcciones de
la memoria del programa es
Seleccione una respuesta.
a. la unidad de control.
b. el acumulador.
c. el contador del programa.
d. el registro de instrucción.
C: El contador del programa es el elemento que ejerce control sobre las direcciones del la
memoria de programa.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Correcto
Puntos para este envío: 1/1.
Question 9
Puntos: 1
Las instrucciones del tipo inherentes no llevan parámetros asociados, las instrucciones directas
llevan un parámetro que es la posición de memoria sobre la que ejecutan la acción, (LDA: lee una
posición en el acumulador, LDX: lee una posición en el registro X), la instrucción DIV divide A/X y
deja el resultado en A. De acuerdo a lo anterior, si se necesita hacer una división entre el Dato1
sobre el Dato2 la secuencia apropiada es
Seleccione una respuesta.
a. Div, LDA Dato1, LDX Dato2.
b. LDA Dato1, Div Dato2, LDX.
c. LDA Dato1, LDX Dato2, DIV.
d. Div Dato1 Dato2, LDX, LDA.
Primero se debe leer Dato1 en A (LDA Dato1), luego Dato2 en X (LDX Dato2) y luego dividir (DIV),
la cual es inherente y no tiene parámetros.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 10
Puntos: 1
El modulo de comunicación serial de la CPU HCS08 utiliza 16 pulsos de reloj para armar un bit de
comunicación, junto con la frecuencia de bus y tasa de baudios o bits por segundo esperada para
iniciar la comunicación. Dada la información anterior si se necesita una tasa de baudios no menor
de 115200 bits por segundo la frecuencia de bus mínima será de
Seleccione una respuesta.
a. 2MHz.
b. 8MHz.
c. 1MHz.
d. 4MHz.
Si para armar cada bit se necesitan 16 pulsos, se debe multiplicar por la tasa baudios esperada, el
resultado es 1843200Hz la opción más cercana es 2 MHz.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 11
Puntos: 1
Todo equipo electrónico, y particularmente los equipos que manipulan señales de radio
frecuencia, conmutación electrónica, entre otras, sufren el inevitable mal de ruido por
interferencia electromagnética. La señal de 60Hz (50Hz) de la red de alimentación es el factor más
común, que perturba los sistemas electrónicos. Hoy en día los 220Hz, generados por la
conmutación de la fuente de los sistemas celulares, se constituyen en una de las altas fuentes
contaminantes para los circuitos electrónicos.
De acuerdo al presente problema la solución es
Seleccione una respuesta.
a. implementar filtros de desacople y adecuados diseños de PCBs.
b. reducir el número de instrucciones de un programa.
c. reducir el número de interrupciones de la aplicación.
d. Implementar un sistema operativo embebido.
Ante la interferencia de electromagnética la solución es trabajar en el filtraje de las señales sobre
circuito impreso PCB.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 12
Puntos: 1
Los array son punteros constantes (no variables) que permiten acceder, de una manera indexada,
a una zona de memoria reservada por el compilador automáticamente. Dicho puntero constante
equivale a la dirección de comienzo del array, por ser una constante, este puntero no se inicializa;
se inicializa el contenido de la zona de memoria apuntada.
Para copiar un array en otro array bastaría con
Seleccione una respuesta.
a. copiar elemento a elemento en un bucle.
b. asignar el elemento medio.
c. copiar el puntero a la posición inicial.
d. inicializar el puntero con la zona de memora.
Para copiar un array en otro es necesario copiar elemento a elemento con un bucle.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
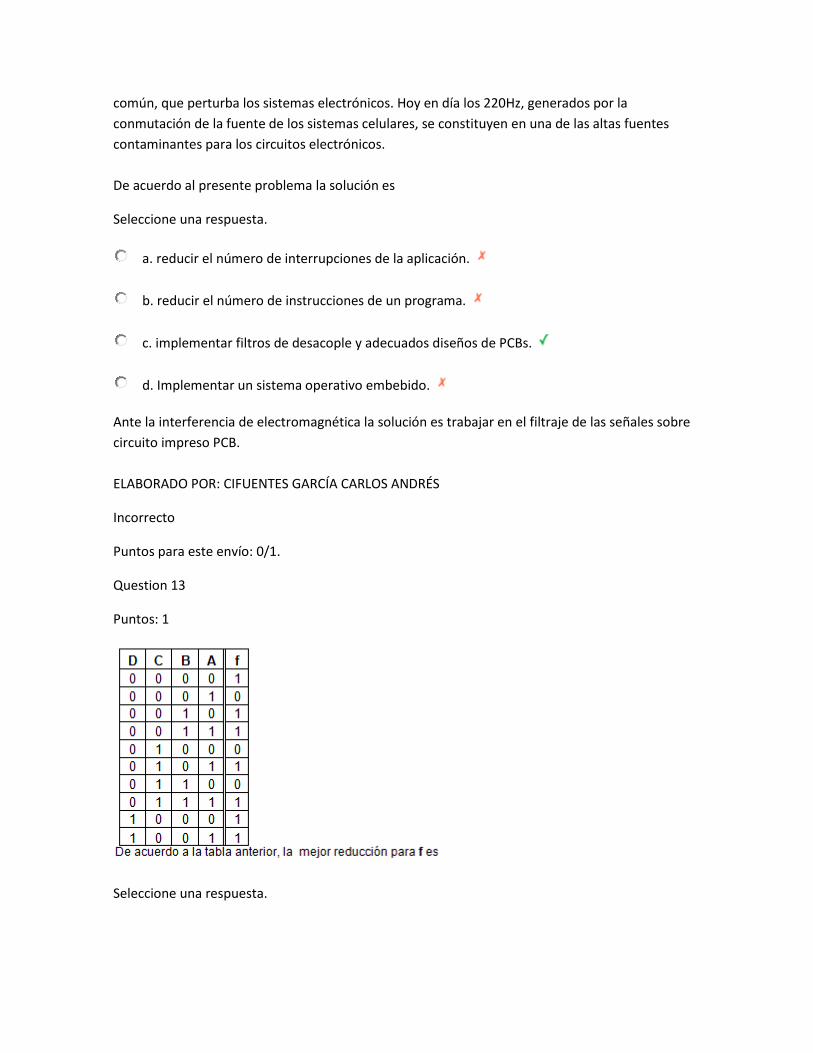
Question 13
Puntos: 1
Hacer una multiplicación en un procesador de 8 bits, de las décadas de los 70 y 80 significaba un
gran gasto de operaciones de suma, resta y desplazamiento en forma iterativa. Con consumos de
cientos de ciclos de máquina. En la actualidad las máquinas pueden hacer una multiplicación en 4
ciclos de máquina o menos, con instrucciones específicas para tal propósito.
Seleccione una respuesta.
a. gasto de varios ciclos de máquina.
b. desplazamientos iterativos.
c. instrucciones iterativas suma.
d. hardware especifico para reducir los ciclos.
Los actuales microcontroladores usan hardware especifico para realizar la multiplicación en
máximo 4 ciclos
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.
Question 14
Puntos: 1
En el direccionamiento indirecto, el campo de la instrucción contiene la dirección donde se
encuentra almacenada la dirección real del operando. Con esto ya es posible direccionar más
memoria, sin embargo se debe acceder dos veces a Memoria, la primera para obtener la dirección
y la otra para obtener el operando. El parámetro que tiene una instrucción en direccionamiento
indirecto es
Seleccione una respuesta.
a. un dato para la pila.
b. una dirección de memoria.
c. un Operando para la ALU.
d. un registro de información.
El parámetro en una instrucción en direccionamiento indirecto es una dirección de memoria, que
permite acceder al parámetro de operación.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 15
Puntos: 1
El protocolo IIC es un sistema de comunicaciones que fue desarrollado por Philips como un
sistema multimaestro, para la conexión de periféricos a distancias relativamente cortas y
velocidades de unos cientos de Kbps El protocolo se implementa sobre dos líneas, una para el reloj
(SCL: Serial Clock) y otra para los datos (SDA: Serial Data). Esta definición lo configura como un
sistema bidireccional del tipo maestro/esclavo. En la última década se ha venido dando un
importante giro en la interconectividad de periféricos con los PC, de tal manera que interfaces
como el puerto paralelo, serial RS232, entre otros, han desaparecido de los computadores. En su
reemplazo, la interface USB (Universal Serial Bus) se ha convertido en la manera más popular para
conectar dispositivos periféricos a un computador personal o a otros dispositivos periféricos.
Para una comunicación entre un MCU y un chip en la tarjeta se debe usar comunicación serial
Seleccione una respuesta.
a. IIC.
b. USB.
c. IR.
d. RS232.
La comunicación IIC está diseñada para comunicaciones de alta velocidad en el mismo circuito
impreso.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Comenzado el martes, 28 de octubre de 2014, 07:56
Completado el martes, 28 de octubre de 2014, 07:56
Tiempo empleado 8 segundos
Puntos 0/15
Calificación 0 de un máximo de 5 (0%)
Question 1
Puntos: 1
Direccionamiento directo a registro: En algunas máquinas se limita éste direccionamiento a la
página cero del mapa de memoria. La página cero es el área de la memoria comprendida entre la
dirección 00H hasta la dirección FFH, es decir, las primeras 256 celdas. El direccionamiento
consiste en intercambiar u operar información entre los registros de la máquina y la memoria. El
direccionamiento directo es, por excelencia, uno de los más rápidos en ejecución que tienen las
máquinas. El direccionamiento directo se caracteriza por
Seleccione una respuesta.
a. realizar operaciones con un solo byte de direcciones.
b. realizar operaciones en toda la memoria.
c. realizar operaciones que implican amplia duración.
d. realizar saltos en cualquier dirección de la memoria.
Un solo byte de direcciones, es decir a accede a las primeras 256 posiciones de la memoria.
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.
Question 2
Puntos: 1
Todo equipo electrónico, y particularmente los equipos que manipulan señales de radio
frecuencia, conmutación electrónica, entre otras, sufren el inevitable mal de ruido por
interferencia electromagnética. La señal de 60Hz (50Hz) de la red de alimentación es el factor más
común, que perturba los sistemas electrónicos. Hoy en día los 220Hz, generados por la
conmutación de la fuente de los sistemas celulares, se constituyen en una de las altas fuentes
contaminantes para los circuitos electrónicos.
De acuerdo al presente problema la solución es
Seleccione una respuesta.
a. Implementar un sistema operativo embebido.
b. reducir el número de instrucciones de un programa.
c. implementar filtros de desacople y adecuados diseños de PCBs.
d. reducir el número de interrupciones de la aplicación.
Ante la interferencia de electromagnética la solución es trabajar en el filtraje de las señales sobre
circuito impreso PCB.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS

Incorrecto
Puntos para este envío: 0/1.
Question 3
Puntos: 1
Los array son punteros constantes (no variables) que permiten acceder, de una manera indexada,
a una zona de memoria reservada por el compilador automáticamente. Dicho puntero constante
equivale a la dirección de comienzo del array, por ser una constante, este puntero no se inicializa;
se inicializa el contenido de la zona de memoria apuntada.
Para copiar un array en otro array bastaría con
Seleccione una respuesta.
a. asignar el elemento medio.
b. copiar elemento a elemento en un bucle.
c. inicializar el puntero con la zona de memora.
d. copiar el puntero a la posición inicial.
Para copiar un array en otro es necesario copiar elemento a elemento con un bucle.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 4
Puntos: 1
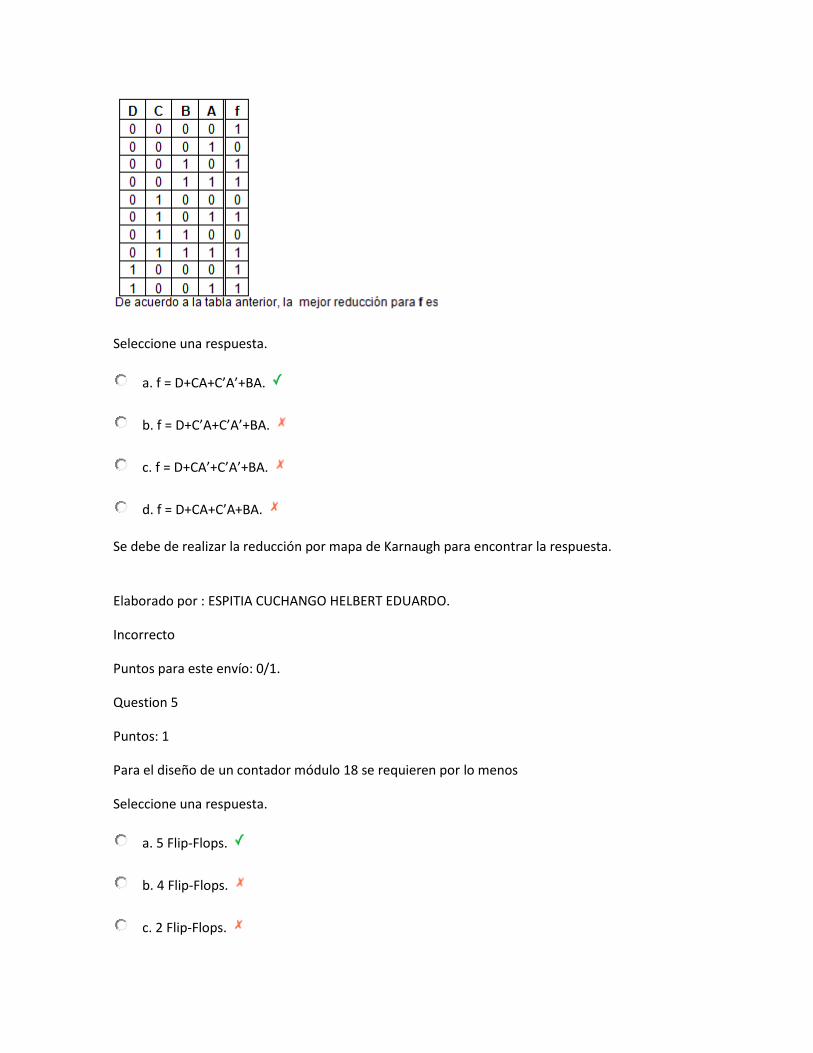
Seleccione una respuesta.
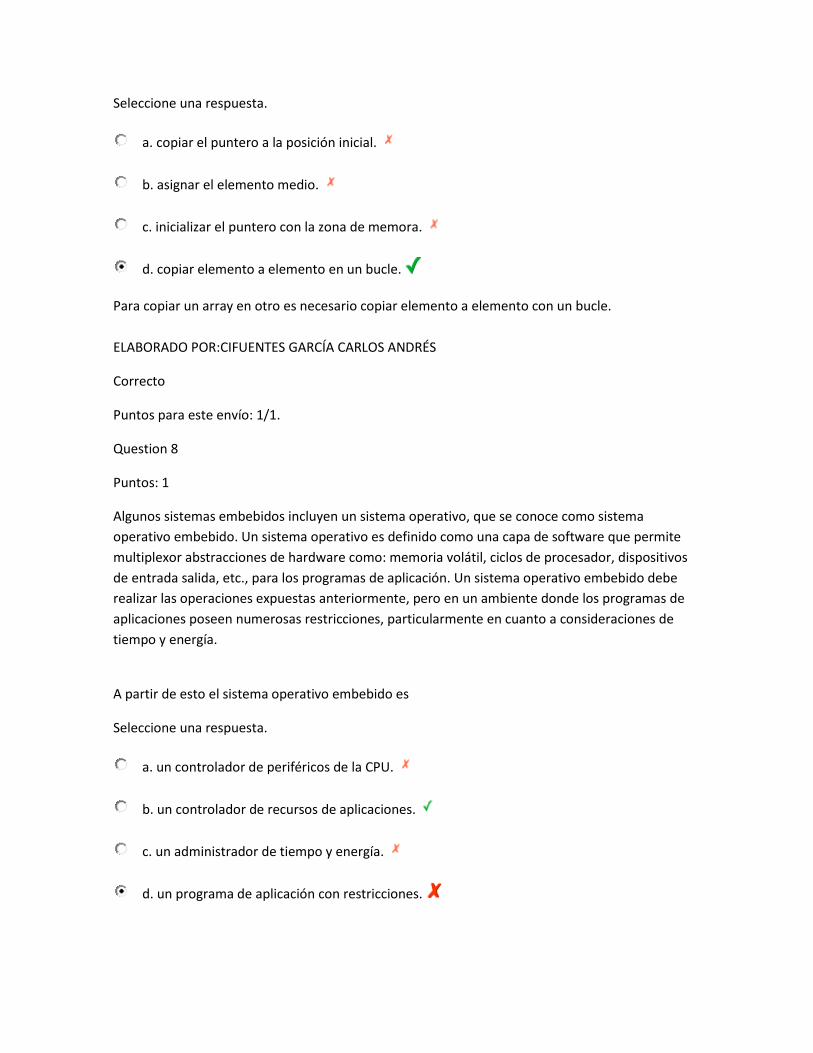
a. f = D+CA+C’A’+BA.
b. f = D+C’A+C’A’+BA.
c. f = D+CA’+C’A’+BA.
d. f = D+CA+C’A+BA.
Se debe de realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por : ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 5
Puntos: 1
Para el diseño de un contador módulo 18 se requieren por lo menos
Seleccione una respuesta.
a. 5 Flip-Flops.
b. 4 Flip-Flops.
c. 2 Flip-Flops.

d. 3 Flip-Flops.
Un contador módulo 18 cuenta de 0-17 la ecuación que permite calcular el número de flip-flops es
m=2n donde se despeja n sin embargo también se puede responder correctamente sabiendo que
con 5 flip-flops se puede contar desde 0-31.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 6
Puntos: 1
En un modulo timer que se basa en un contador de 16 bits para la generación una señal de PWM
se tiene en cuenta la frecuencia de bus del microcontrolador, el prescalizador que es un divisor de
la frecuencia de bus, y el periodo que se desee para la señal de PWM. Dado lo anterior si se está
basado en un frecuencia de bus de 24Mhz y con el requerimiento de 50Hz de frecuencia PWM, el
valor mínimo que debe tener el prescalizador para no superar el tamaño del timer de 16 bits es
Seleccione una respuesta.
a. 2.
b. 16.
c. 4.
d. 8.
Con las condiciones dadas el contador debería contar 480000 ciclos (24000000/50) el conteo
máximo es 65535 (16 bits), con un prescalizador de 8 contaría hasta 60000 y sería el mínimo con
las opciones dadas.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 7

Puntos: 1
El resultado de realizar la multiplicación de los números binarios 1010 y 1101 es
Seleccione una respuesta.
a. 10000010.
b. 10000001.
c. 10000011.
d. 10000110.
Elaborado por:Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 8
Puntos: 1
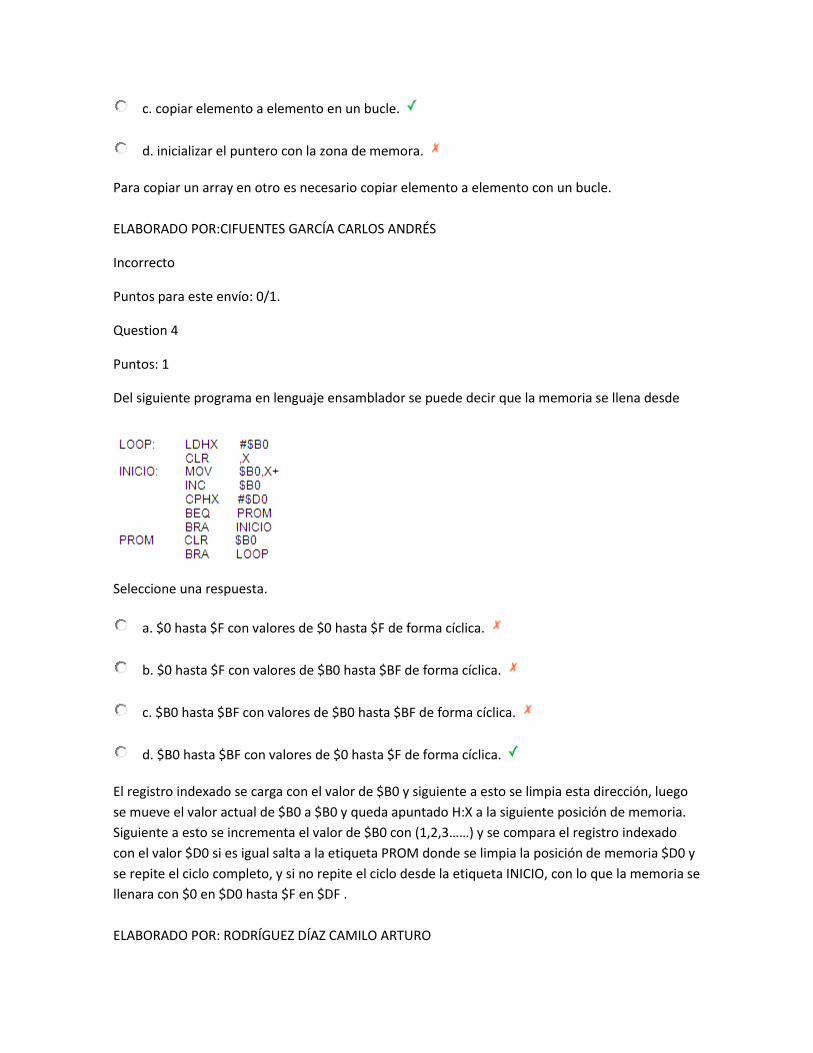
Una variable, pasada como parámetro a una función, no ve modificado su valor original durante la
ejecución (paso por valor, copia local) Para modificar, dentro de una función, el valor de una
variable externa a la función, se debe pasar por la referencia (pasar su dirección).
void suma(int a, int b, int *ps){*ps=a+b;}
void main(void) {... int s; suma(10,3, &s );...} /* s contendrá ahora un 13*/ basado en las dos
anteriores líneas de código ps contiene.
Seleccione una respuesta.
a. la dirección de s.
b. el resultado de la suma.
c. un parámetro de la suma.
d. la dirección de b.
Desde la invocación de la función suma, se observa que se envía como parámetro la dirección de s,
la cual es recibida desde la función en ps.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 9
Puntos: 1
El protocolo IIC es un sistema de comunicaciones que fue desarrollado por Philips como un
sistema multimaestro, para la conexión de periféricos a distancias relativamente cortas y
velocidades de unos cientos de Kbps El protocolo se implementa sobre dos líneas, una para el reloj
(SCL: Serial Clock) y otra para los datos (SDA: Serial Data). Esta definición lo configura como un
sistema bidireccional del tipo maestro/esclavo. En la última década se ha venido dando un
importante giro en la interconectividad de periféricos con los PC, de tal manera que interfaces
como el puerto paralelo, serial RS232, entre otros, han desaparecido de los computadores. En su
reemplazo, la interface USB (Universal Serial Bus) se ha convertido en la manera más popular para
conectar dispositivos periféricos a un computador personal o a otros dispositivos periféricos.
Para una comunicación entre un MCU y un chip en la tarjeta se debe usar comunicación serial
Seleccione una respuesta.
a. RS232.
b. USB.
c. IIC.
d. IR.
La comunicación IIC está diseñada para comunicaciones de alta velocidad en el mismo circuito
impreso.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 10
Puntos: 1
El registro SP (stack pointer) o apuntador de pila es un registro de 16 bits tipo LIFO el cual contiene
la dirección de la siguiente posición en la pila. El SP siempre apunta al siguiente byte disponible o
vacio y durante un reset apunta a la última posición en la pila.
Con lo anterior se puede decir que si se saca un dato de la pila previamente almacenado el SP
Seleccione una respuesta.
a. se limpia.
b. apunta a la siguiente posición.
c. se decrementa.
d. se incrementa.
Cuando un dato es sacado de la pila el SP debe incrementarse, ya que este registro es de tipo LIFO
(Last in first out), ultimo en entrar primero en salir. Como el SP durante un reset apunta a la última
posición de memoria, Si se almacenaron n datos en la pila el SP decremento hasta quedar
apuntando a la siguiente posición disponible, pero al sacar el dato debe limpiar la posición
anterior, es decir se debe incrementar.
ELABORADO POR: RODRÍGUEZ DÍAZ CAMILO ARTURO
Incorrecto
Puntos para este envío: 0/1.
Question 11
Puntos: 1
En la arquitectura del procesador el elemento que tiene dominio directo sobre las direcciones de
la memoria del programa es
Seleccione una respuesta.
a. el acumulador.
b. la unidad de control.
c. el contador del programa.
d. el registro de instrucción.
C: El contador del programa es el elemento que ejerce control sobre las direcciones del la
memoria de programa.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 12
Puntos: 1
Seleccione una respuesta.
a. [0:F].
b. [0:C].
c. [0:9].
d. [0:B].
El ASCII del 0 al 9 está entre 0x30 y 0x39, la A continua en 0x40 y así hasta la F, por lo cual hasta 9
hace una buena conversión.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 13
Puntos: 1
La simplificación de la siguiente expresión F=C’AB+CAB+CA’B+CAB’ es
Seleccione una respuesta.
a. F = AB+CB.
b. F = AB+CB+CA.
c. F = AB+CB+CA+CAB.
d. F = AB+CB+A.
Se debe realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por: ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 14
Puntos: 1
Hacer una multiplicación en un procesador de 8 bits, de las décadas de los 70 y 80 significaba un
gran gasto de operaciones de suma, resta y desplazamiento en forma iterativa. Con consumos de
cientos de ciclos de máquina. En la actualidad las máquinas pueden hacer una multiplicación en 4
ciclos de máquina o menos, con instrucciones específicas para tal propósito.
Seleccione una respuesta.
a. gasto de varios ciclos de máquina.
b. desplazamientos iterativos.
c. hardware especifico para reducir los ciclos.
d. instrucciones iterativas suma.
Los actuales microcontroladores usan hardware especifico para realizar la multiplicación en
máximo 4 ciclos
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.
Question 15
Puntos: 1
Cuando se presenta un requerimiento de interrupción, la CPU almacena en la pila el contenido de
los registros: CCR, Acumulador, X, Contador de Programa Alto y bajo. Al retornar (RTI) la
interrupción, se restaura los valores de los registros y la pila. Dado lo anterior si dentro de una
aplicación hay una rutina de interrupción que no cuenta con la instrucción RTI, y se ejecuta cada 1
mili segundo y el tamaño de la pila es 20 bytes, el tiempo en que se presenta un overflow de la pila
es
Seleccione una respuesta.
a. 3 mili Segundos.
b. 4 mili Segundos.
c. 5 mili segundos.
d. 6 mili Segundos.
En el primer mili segundo se gastan 6 bytes (CCR, A, X, PC Alto, PC Bajo), en el siguiente mili
segundo 12 bytes, en el tercer 18 bytes, en el 4 mili segundo 24 bytes, y se presenta overflow de la
pila.
Elaborado por: Carlos Andrés Cifuentes García

Incorrecto
Puntos para este envío: 0/1.
Comenzado el martes, 28 de octubre de 2014, 10:00
Completado el martes, 28 de octubre de 2014, 10:00
Tiempo empleado 8 segundos
Puntos 0/15
Calificación 0 de un máximo de 5 (0%)
Question 1
Puntos: 1
Seleccione una respuesta.
a. Y = A and B.
b. Y = A nor B.
c. Y = A or B.
d. Y = A xor B.
Elaborado por: Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 2
Puntos: 1
Para el diseño de un contador módulo 18 se requieren por lo menos
Seleccione una respuesta.
a. 4 Flip-Flops.
b. 3 Flip-Flops.
c. 5 Flip-Flops.
d. 2 Flip-Flops.
Un contador módulo 18 cuenta de 0-17 la ecuación que permite calcular el número de flip-flops es
m=2n donde se despeja n sin embargo también se puede responder correctamente sabiendo que
con 5 flip-flops se puede contar desde 0-31.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 3
Puntos: 1
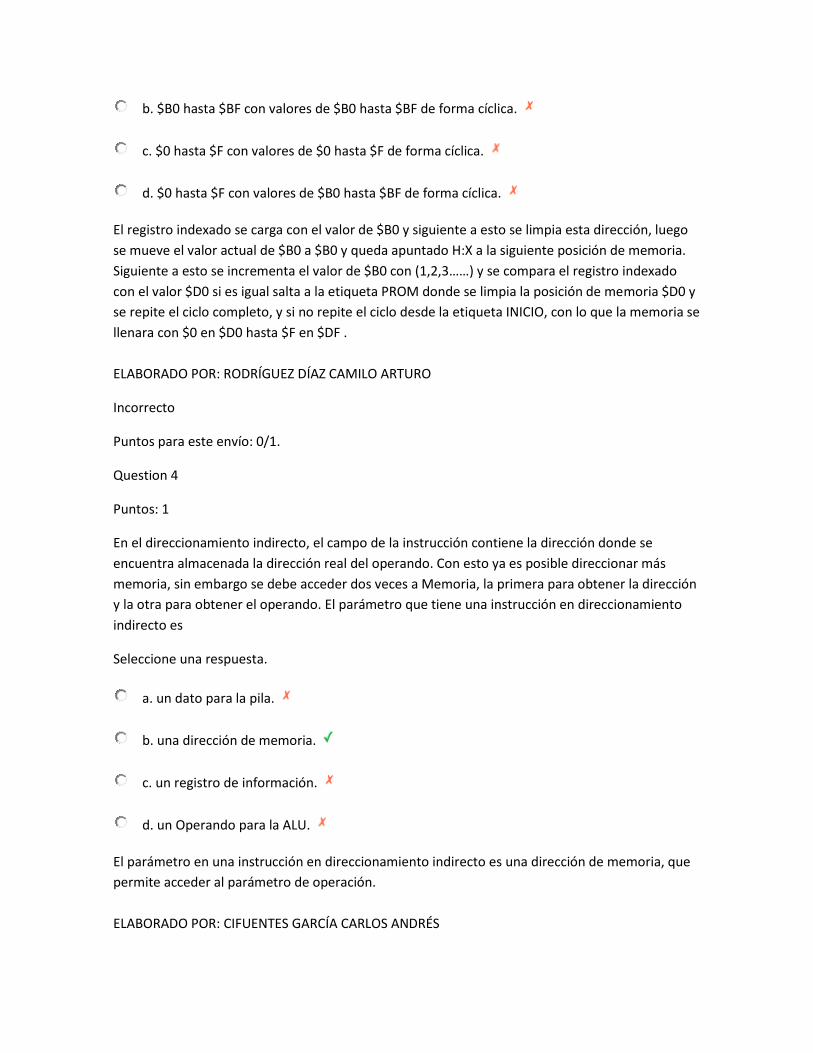
Del siguiente programa en lenguaje ensamblador se puede decir que la memoria se llena desde
Seleccione una respuesta.
a. $B0 hasta $BF con valores de $0 hasta $F de forma cíclica.
b. $B0 hasta $BF con valores de $B0 hasta $BF de forma cíclica.
c. $0 hasta $F con valores de $0 hasta $F de forma cíclica.
d. $0 hasta $F con valores de $B0 hasta $BF de forma cíclica.
El registro indexado se carga con el valor de $B0 y siguiente a esto se limpia esta dirección, luego
se mueve el valor actual de $B0 a $B0 y queda apuntado H:X a la siguiente posición de memoria.
Siguiente a esto se incrementa el valor de $B0 con (1,2,3……) y se compara el registro indexado
con el valor $D0 si es igual salta a la etiqueta PROM donde se limpia la posición de memoria $D0 y
se repite el ciclo completo, y si no repite el ciclo desde la etiqueta INICIO, con lo que la memoria se
llenara con $0 en $D0 hasta $F en $DF .
ELABORADO POR: RODRÍGUEZ DÍAZ CAMILO ARTURO
Incorrecto
Puntos para este envío: 0/1.
Question 4
Puntos: 1
En el direccionamiento indirecto, el campo de la instrucción contiene la dirección donde se
encuentra almacenada la dirección real del operando. Con esto ya es posible direccionar más
memoria, sin embargo se debe acceder dos veces a Memoria, la primera para obtener la dirección
y la otra para obtener el operando. El parámetro que tiene una instrucción en direccionamiento
indirecto es
Seleccione una respuesta.
a. un dato para la pila.
b. una dirección de memoria.
c. un registro de información.
d. un Operando para la ALU.
El parámetro en una instrucción en direccionamiento indirecto es una dirección de memoria, que
permite acceder al parámetro de operación.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 5
Puntos: 1
El apuntador a la pila es un registro de 16 bits en la CPU HCS08, usado para apuntar a la siguiente
posición disponible en la pila con una secuencia LIFO (Ultimo en entrar primero en salir), cuando la
CPU salta a una subrutina (JSR) almacena la dirección actual en la pila, y el retorno se hace con
(RTS). De acuerdo a lo anterior si en una aplicación se realizan 4 saltos anidados, subrutinas
llamadas así: (Inicio) Sub1, Sub2, Sub3 y Sub4, la secuencia como se libera la pila hasta llegar al
punto de inicio es
Seleccione una respuesta.
a. Sub4, Sub3, Sub2, Sub1.
b. Sub1, Sub2, Sub3, Sub4.
c. Sub1, Sub2, Sub4, Sub3.
d. Sub3, Sub4, Sub2, Sub1.
Al ser la pila de tipo LIFO saldrá primero la ultima en entrar es decir primero Sub4, luego Sub3,
Sub2 y por ultimo Sub1.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 6
Puntos: 1

Seleccione una respuesta.
a. [0:B].
b. [0:9].
c. [0:C].
d. [0:F].
El ASCII del 0 al 9 está entre 0x30 y 0x39, la A continua en 0x40 y así hasta la F, por lo cual hasta 9
hace una buena conversión.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 7
Puntos: 1
El resultado de realizar la multiplicación de los números binarios 1010 y 1101 es
Seleccione una respuesta.
a. 10000110.
b. 10000001.

c. 10000010.
d. 10000011.
Elaborado por:Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 8
Puntos: 1
El protocolo IIC es un sistema de comunicaciones que fue desarrollado por Philips como un
sistema multimaestro, para la conexión de periféricos a distancias relativamente cortas y
velocidades de unos cientos de Kbps El protocolo se implementa sobre dos líneas, una para el reloj
(SCL: Serial Clock) y otra para los datos (SDA: Serial Data). Esta definición lo configura como un
sistema bidireccional del tipo maestro/esclavo. En la última década se ha venido dando un
importante giro en la interconectividad de periféricos con los PC, de tal manera que interfaces
como el puerto paralelo, serial RS232, entre otros, han desaparecido de los computadores. En su
reemplazo, la interface USB (Universal Serial Bus) se ha convertido en la manera más popular para
conectar dispositivos periféricos a un computador personal o a otros dispositivos periféricos.
Para una comunicación entre un MCU y un chip en la tarjeta se debe usar comunicación serial
Seleccione una respuesta.
a. RS232.
b. IR.
c. USB.
d. IIC.
La comunicación IIC está diseñada para comunicaciones de alta velocidad en el mismo circuito
impreso.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 9
Puntos: 1
Algunos sistemas embebidos incluyen un sistema operativo, que se conoce como sistema
operativo embebido. Un sistema operativo es definido como una capa de software que permite
multiplexor abstracciones de hardware como: memoria volátil, ciclos de procesador, dispositivos
de entrada salida, etc., para los programas de aplicación. Un sistema operativo embebido debe
realizar las operaciones expuestas anteriormente, pero en un ambiente donde los programas de
aplicaciones poseen numerosas restricciones, particularmente en cuanto a consideraciones de
tiempo y energía.
A partir de esto el sistema operativo embebido es
Seleccione una respuesta.
a. un controlador de periféricos de la CPU.
b. un controlador de recursos de aplicaciones.
c. un programa de aplicación con restricciones.
d. un administrador de tiempo y energía.
El sistema operativo embebido es una capa de software que administra o controla los recursos de
las aplicaciones del sistema embebido.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 10
Puntos: 1

Seleccione una respuesta.
a. f = D+C’A+C’A’+BA.
b. f = D+CA+C’A’+BA.
c. f = D+CA’+C’A’+BA.
d. f = D+CA+C’A+BA.
Se debe de realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por : ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 11
Puntos: 1
Una variable, pasada como parámetro a una función, no ve modificado su valor original durante la
ejecución (paso por valor, copia local) Para modificar, dentro de una función, el valor de una
variable externa a la función, se debe pasar por la referencia (pasar su dirección).
void suma(int a, int b, int *ps){*ps=a+b;}
void main(void) {... int s; suma(10,3, &s );...} /* s contendrá ahora un 13*/ basado en las dos
anteriores líneas de código ps contiene.
Seleccione una respuesta.
a. la dirección de s.
b. el resultado de la suma.
c. un parámetro de la suma.
d. la dirección de b.
Desde la invocación de la función suma, se observa que se envía como parámetro la dirección de s,
la cual es recibida desde la función en ps.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 12
Puntos: 1
La simplificación de la siguiente expresión F=C’AB+CAB+CA’B+CAB’ es
Seleccione una respuesta.
a. F = AB+CB.
b. F = AB+CB+CA+CAB.
c. F = AB+CB+CA.
d. F = AB+CB+A.
Se debe realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por: ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 13
Puntos: 1

Todo equipo electrónico, y particularmente los equipos que manipulan señales de radio
frecuencia, conmutación electrónica, entre otras, sufren el inevitable mal de ruido por
interferencia electromagnética. La señal de 60Hz (50Hz) de la red de alimentación es el factor más
común, que perturba los sistemas electrónicos. Hoy en día los 220Hz, generados por la
conmutación de la fuente de los sistemas celulares, se constituyen en una de las altas fuentes
contaminantes para los circuitos electrónicos.
De acuerdo al presente problema la solución es
Seleccione una respuesta.
a. implementar filtros de desacople y adecuados diseños de PCBs.
b. reducir el número de instrucciones de un programa.
c. Implementar un sistema operativo embebido.
d. reducir el número de interrupciones de la aplicación.
Ante la interferencia de electromagnética la solución es trabajar en el filtraje de las señales sobre
circuito impreso PCB.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 14
Puntos: 1
En un modulo timer que se basa en un contador de 16 bits para la generación una señal de PWM
se tiene en cuenta la frecuencia de bus del microcontrolador, el prescalizador que es un divisor de
la frecuencia de bus, y el periodo que se desee para la señal de PWM. Dado lo anterior si se está
basado en un frecuencia de bus de 24Mhz y con el requerimiento de 50Hz de frecuencia PWM, el
valor mínimo que debe tener el prescalizador para no superar el tamaño del timer de 16 bits es
Seleccione una respuesta.
a. 8.
b. 4.
c. 16.
d. 2.
Con las condiciones dadas el contador debería contar 480000 ciclos (24000000/50) el conteo
máximo es 65535 (16 bits), con un prescalizador de 8 contaría hasta 60000 y sería el mínimo con
las opciones dadas.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 15
Puntos: 1
Direccionamiento directo a registro: En algunas máquinas se limita éste direccionamiento a la
página cero del mapa de memoria. La página cero es el área de la memoria comprendida entre la
dirección 00H hasta la dirección FFH, es decir, las primeras 256 celdas. El direccionamiento
consiste en intercambiar u operar información entre los registros de la máquina y la memoria. El
direccionamiento directo es, por excelencia, uno de los más rápidos en ejecución que tienen las
máquinas. El direccionamiento directo se caracteriza por
Seleccione una respuesta.
a. realizar operaciones que implican amplia duración.
b. realizar operaciones en toda la memoria.
c. realizar saltos en cualquier dirección de la memoria.
d. realizar operaciones con un solo byte de direcciones.
Un solo byte de direcciones, es decir a accede a las primeras 256 posiciones de la memoria.
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.
Comenzado el martes, 28 de octubre de 2014, 13:29
Completado el martes, 28 de octubre de 2014, 13:29
Tiempo empleado 6 segundos
Puntos 0/15
Calificación 0 de un máximo de 5 (0%)
Question 1
Puntos: 1
NO es paso de diseño de procesador
Seleccione una respuesta.
a. establecer el repertorio de instrucciones.
b. programar la memoria.
c. diseñar el camino de datos.
d. realizar la máquina de estados algorítmica.
La programación de la memoria se realiza luego de tener implementado el procesador.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 2
Puntos: 1
En el direccionamiento indirecto, el campo de la instrucción contiene la dirección donde se
encuentra almacenada la dirección real del operando. Con esto ya es posible direccionar más
memoria, sin embargo se debe acceder dos veces a Memoria, la primera para obtener la dirección
y la otra para obtener el operando. El parámetro que tiene una instrucción en direccionamiento
indirecto es
Seleccione una respuesta.
a. un Operando para la ALU.
b. un dato para la pila.
c. un registro de información.
d. una dirección de memoria.
El parámetro en una instrucción en direccionamiento indirecto es una dirección de memoria, que
permite acceder al parámetro de operación.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 3
Puntos: 1
Los array son punteros constantes (no variables) que permiten acceder, de una manera indexada,
a una zona de memoria reservada por el compilador automáticamente. Dicho puntero constante
equivale a la dirección de comienzo del array, por ser una constante, este puntero no se inicializa;
se inicializa el contenido de la zona de memoria apuntada.
Para copiar un array en otro array bastaría con
Seleccione una respuesta.
a. copiar el puntero a la posición inicial.
b. inicializar el puntero con la zona de memora.
c. asignar el elemento medio.
d. copiar elemento a elemento en un bucle.
Para copiar un array en otro es necesario copiar elemento a elemento con un bucle.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 4
Puntos: 1
El apuntador a la pila es un registro de 16 bits en la CPU HCS08, usado para apuntar a la siguiente
posición disponible en la pila con una secuencia LIFO (Ultimo en entrar primero en salir), cuando la
CPU salta a una subrutina (JSR) almacena la dirección actual en la pila, y el retorno se hace con
(RTS). De acuerdo a lo anterior si en una aplicación se realizan 4 saltos anidados, subrutinas
llamadas así: (Inicio) Sub1, Sub2, Sub3 y Sub4, la secuencia como se libera la pila hasta llegar al
punto de inicio es
Seleccione una respuesta.
a. Sub1, Sub2, Sub3, Sub4.
b. Sub3, Sub4, Sub2, Sub1.
c. Sub1, Sub2, Sub4, Sub3.
d. Sub4, Sub3, Sub2, Sub1.
Al ser la pila de tipo LIFO saldrá primero la ultima en entrar es decir primero Sub4, luego Sub3,
Sub2 y por ultimo Sub1.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 5
Puntos: 1
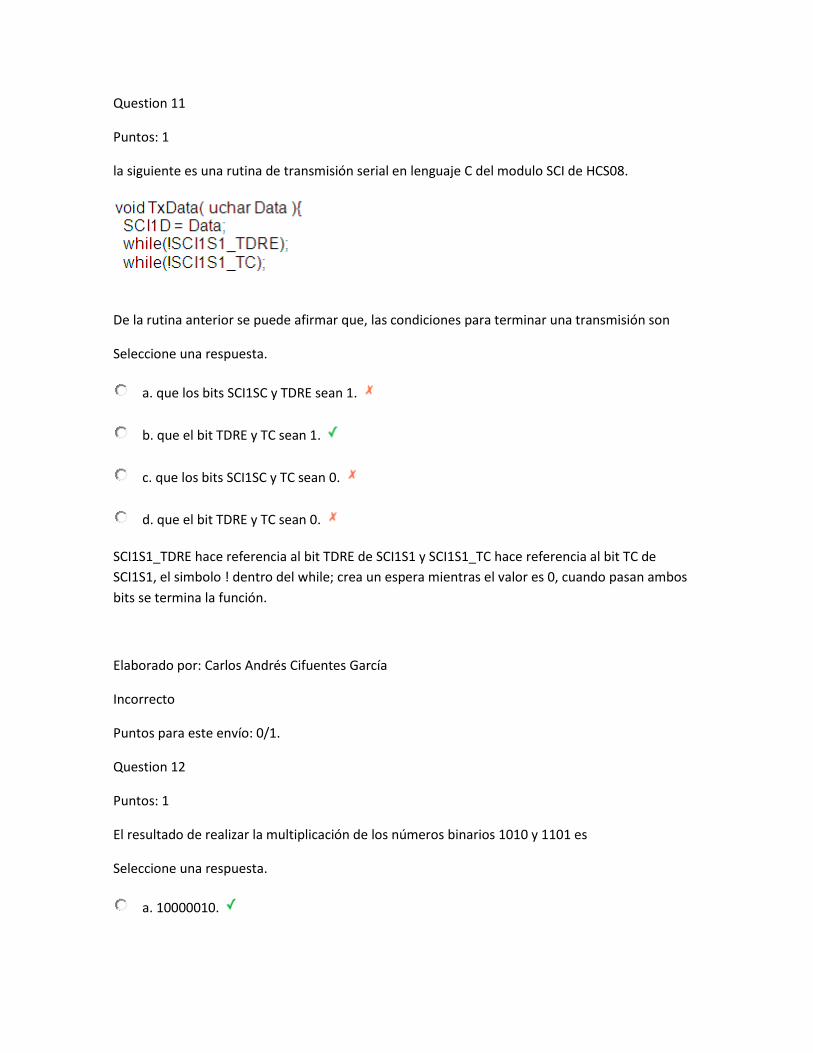
la siguiente es una rutina de transmisión serial en lenguaje C del modulo SCI de HCS08.
De la rutina anterior se puede afirmar que, las condiciones para terminar una transmisión son
Seleccione una respuesta.
a. que los bits SCI1SC y TC sean 0.
b. que los bits SCI1SC y TDRE sean 1.
c. que el bit TDRE y TC sean 0.
d. que el bit TDRE y TC sean 1.
SCI1S1_TDRE hace referencia al bit TDRE de SCI1S1 y SCI1S1_TC hace referencia al bit TC de
SCI1S1, el simbolo ! dentro del while; crea un espera mientras el valor es 0, cuando pasan ambos
bits se termina la función.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 6
Puntos: 1
El registro SP (stack pointer) o apuntador de pila es un registro de 16 bits tipo LIFO el cual contiene
la dirección de la siguiente posición en la pila. El SP siempre apunta al siguiente byte disponible o
vacio y durante un reset apunta a la última posición en la pila.
Con lo anterior se puede decir que si se saca un dato de la pila previamente almacenado el SP
Seleccione una respuesta.
a. apunta a la siguiente posición.
b. se limpia.
c. se incrementa.
d. se decrementa.
Cuando un dato es sacado de la pila el SP debe incrementarse, ya que este registro es de tipo LIFO
(Last in first out), ultimo en entrar primero en salir. Como el SP durante un reset apunta a la última
posición de memoria, Si se almacenaron n datos en la pila el SP decremento hasta quedar
apuntando a la siguiente posición disponible, pero al sacar el dato debe limpiar la posición
anterior, es decir se debe incrementar.
ELABORADO POR: RODRÍGUEZ DÍAZ CAMILO ARTURO
Incorrecto
Puntos para este envío: 0/1.
Question 7
Puntos: 1
Seleccione una respuesta.
a. Y = A or B.
b. Y = A xor B.
c. Y = A and B.
d. Y = A nor B.
Elaborado por: Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 8
Puntos: 1
Seleccione una respuesta.
a. f = D+CA’+C’A’+BA.
b. f = D+C’A+C’A’+BA.
c. f = D+CA+C’A+BA.
d. f = D+CA+C’A’+BA.
Se debe de realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por : ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 9
Puntos: 1
En la arquitectura del procesador el elemento que tiene dominio directo sobre las direcciones de
la memoria del programa es
Seleccione una respuesta.
a. el acumulador.

b. la unidad de control.
c. el contador del programa.
d. el registro de instrucción.
C: El contador del programa es el elemento que ejerce control sobre las direcciones del la
memoria de programa.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 10
Puntos: 1
Seleccione una respuesta.
a. [0:9].
b. [0:C].
c. [0:F].
d. [0:B].
El ASCII del 0 al 9 está entre 0x30 y 0x39, la A continua en 0x40 y así hasta la F, por lo cual hasta 9
hace una buena conversión.

Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 11
Puntos: 1
La simplificación de la siguiente expresión F=C’AB+CAB+CA’B+CAB’ es
Seleccione una respuesta.
a. F = AB+CB+CA.
b. F = AB+CB+A.
c. F = AB+CB+CA+CAB.
d. F = AB+CB.
Se debe realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por: ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 12
Puntos: 1
Direccionamiento directo a registro: En algunas máquinas se limita éste direccionamiento a la
página cero del mapa de memoria. La página cero es el área de la memoria comprendida entre la
dirección 00H hasta la dirección FFH, es decir, las primeras 256 celdas. El direccionamiento
consiste en intercambiar u operar información entre los registros de la máquina y la memoria. El
direccionamiento directo es, por excelencia, uno de los más rápidos en ejecución que tienen las
máquinas. El direccionamiento directo se caracteriza por
Seleccione una respuesta.
a. realizar operaciones en toda la memoria.
b. realizar saltos en cualquier dirección de la memoria.
c. realizar operaciones que implican amplia duración.
d. realizar operaciones con un solo byte de direcciones.
Un solo byte de direcciones, es decir a accede a las primeras 256 posiciones de la memoria.
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.
Question 13
Puntos: 1
Hacer una multiplicación en un procesador de 8 bits, de las décadas de los 70 y 80 significaba un
gran gasto de operaciones de suma, resta y desplazamiento en forma iterativa. Con consumos de
cientos de ciclos de máquina. En la actualidad las máquinas pueden hacer una multiplicación en 4
ciclos de máquina o menos, con instrucciones específicas para tal propósito.
Seleccione una respuesta.
a. gasto de varios ciclos de máquina.
b. desplazamientos iterativos.
c. instrucciones iterativas suma.
d. hardware especifico para reducir los ciclos.
Los actuales microcontroladores usan hardware especifico para realizar la multiplicación en
máximo 4 ciclos
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.
Question 14
Puntos: 1
El modulo de comunicación serial de la CPU HCS08 utiliza 16 pulsos de reloj para armar un bit de
comunicación, junto con la frecuencia de bus y tasa de baudios o bits por segundo esperada para
iniciar la comunicación. Dada la información anterior si se necesita una tasa de baudios no menor
de 115200 bits por segundo la frecuencia de bus mínima será de
Seleccione una respuesta.
a. 1MHz.
b. 2MHz.
c. 4MHz.
d. 8MHz.
Si para armar cada bit se necesitan 16 pulsos, se debe multiplicar por la tasa baudios esperada, el
resultado es 1843200Hz la opción más cercana es 2 MHz.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 15
Puntos: 1
El protocolo IIC es un sistema de comunicaciones que fue desarrollado por Philips como un
sistema multimaestro, para la conexión de periféricos a distancias relativamente cortas y
velocidades de unos cientos de Kbps El protocolo se implementa sobre dos líneas, una para el reloj
(SCL: Serial Clock) y otra para los datos (SDA: Serial Data). Esta definición lo configura como un
sistema bidireccional del tipo maestro/esclavo. En la última década se ha venido dando un
importante giro en la interconectividad de periféricos con los PC, de tal manera que interfaces
como el puerto paralelo, serial RS232, entre otros, han desaparecido de los computadores. En su
reemplazo, la interface USB (Universal Serial Bus) se ha convertido en la manera más popular para
conectar dispositivos periféricos a un computador personal o a otros dispositivos periféricos.
Para una comunicación entre un MCU y un chip en la tarjeta se debe usar comunicación serial
Seleccione una respuesta.
a. IR.
b. RS232.
c. IIC.
d. USB.
La comunicación IIC está diseñada para comunicaciones de alta velocidad en el mismo circuito
impreso.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Comenzado el miércoles, 29 de octubre de 2014, 10:17
Completado el miércoles, 29 de octubre de 2014, 10:17
Tiempo empleado 3 segundos
Puntos 0/15
Calificación 0 de un máximo de 5 (0%)
Question 1
Puntos: 1
Para el diseño de un contador módulo 18 se requieren por lo menos
Seleccione una respuesta.
a. 4 Flip-Flops.
b. 2 Flip-Flops.
c. 3 Flip-Flops.
d. 5 Flip-Flops.
Un contador módulo 18 cuenta de 0-17 la ecuación que permite calcular el número de flip-flops es
m=2n donde se despeja n sin embargo también se puede responder correctamente sabiendo que
con 5 flip-flops se puede contar desde 0-31.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 2
Puntos: 1
El registro PC o contador de programa es aquel que contiene la dirección de la siguiente
instrucción u operando a ser ejecutado, normalmente la dirección en el contador de programa
incrementa secuencialmente a la siguiente posición de memoria.
Con base a lo anterior un evento que NO modifica el contador de programa es
Seleccione una respuesta.
a. un Branch.
b. una interrupción.
c. una suma.
d. un Jump.
Este evento no afecta el incremento secuencial del PC porque al ser ejecutado el PC queda
apuntando a la siguiente instrucción u operando. Con esta instrucción el programa se ejecuta
secuencialmente.
Incorrecto
Puntos para este envío: 0/1.
Question 3
Puntos: 1
Direccionamiento directo a registro: En algunas máquinas se limita éste direccionamiento a la
página cero del mapa de memoria. La página cero es el área de la memoria comprendida entre la
dirección 00H hasta la dirección FFH, es decir, las primeras 256 celdas. El direccionamiento
consiste en intercambiar u operar información entre los registros de la máquina y la memoria. El
direccionamiento directo es, por excelencia, uno de los más rápidos en ejecución que tienen las
máquinas. El direccionamiento directo se caracteriza por
Seleccione una respuesta.
a. realizar saltos en cualquier dirección de la memoria.
b. realizar operaciones que implican amplia duración.
c. realizar operaciones con un solo byte de direcciones.
d. realizar operaciones en toda la memoria.
Un solo byte de direcciones, es decir a accede a las primeras 256 posiciones de la memoria.
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.
Question 4
Puntos: 1
El resultado de realizar la multiplicación de los números binarios 1010 y 1101 es
Seleccione una respuesta.
a. 10000110.
b. 10000010.
c. 10000011.
d. 10000001.
Elaborado por:Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 5
Puntos: 1
Algunos sistemas embebidos incluyen un sistema operativo, que se conoce como sistema
operativo embebido. Un sistema operativo es definido como una capa de software que permite
multiplexor abstracciones de hardware como: memoria volátil, ciclos de procesador, dispositivos
de entrada salida, etc., para los programas de aplicación. Un sistema operativo embebido debe
realizar las operaciones expuestas anteriormente, pero en un ambiente donde los programas de
aplicaciones poseen numerosas restricciones, particularmente en cuanto a consideraciones de
tiempo y energía.
A partir de esto el sistema operativo embebido es
Seleccione una respuesta.
a. un controlador de recursos de aplicaciones.
b. un programa de aplicación con restricciones.
c. un controlador de periféricos de la CPU.
d. un administrador de tiempo y energía.
El sistema operativo embebido es una capa de software que administra o controla los recursos de
las aplicaciones del sistema embebido.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 6
Puntos: 1
Seleccione una respuesta.
a. Y = A and B.
b. Y = A or B.
c. Y = A nor B.
d. Y = A xor B.
Elaborado por: Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 7
Puntos: 1
El registro SP (stack pointer) o apuntador de pila es un registro de 16 bits tipo LIFO el cual contiene
la dirección de la siguiente posición en la pila. El SP siempre apunta al siguiente byte disponible o
vacio y durante un reset apunta a la última posición en la pila.
Con lo anterior se puede decir que si se saca un dato de la pila previamente almacenado el SP
Seleccione una respuesta.
a. se incrementa.
b. se limpia.
c. apunta a la siguiente posición.
d. se decrementa.
Cuando un dato es sacado de la pila el SP debe incrementarse, ya que este registro es de tipo LIFO
(Last in first out), ultimo en entrar primero en salir. Como el SP durante un reset apunta a la última
posición de memoria, Si se almacenaron n datos en la pila el SP decremento hasta quedar
apuntando a la siguiente posición disponible, pero al sacar el dato debe limpiar la posición
anterior, es decir se debe incrementar.
ELABORADO POR: RODRÍGUEZ DÍAZ CAMILO ARTURO
Incorrecto
Puntos para este envío: 0/1.
Question 8
Puntos: 1
Los array son punteros constantes (no variables) que permiten acceder, de una manera indexada,
a una zona de memoria reservada por el compilador automáticamente. Dicho puntero constante
equivale a la dirección de comienzo del array, por ser una constante, este puntero no se inicializa;
se inicializa el contenido de la zona de memoria apuntada.
Para copiar un array en otro array bastaría con
Seleccione una respuesta.
a. copiar elemento a elemento en un bucle.
b. inicializar el puntero con la zona de memora.
c. copiar el puntero a la posición inicial.
d. asignar el elemento medio.
Para copiar un array en otro es necesario copiar elemento a elemento con un bucle.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.

Question 9
Puntos: 1
En un modulo timer que se basa en un contador de 16 bits para la generación una señal de PWM
se tiene en cuenta la frecuencia de bus del microcontrolador, el prescalizador que es un divisor de
la frecuencia de bus, y el periodo que se desee para la señal de PWM. Dado lo anterior si se está
basado en un frecuencia de bus de 24Mhz y con el requerimiento de 50Hz de frecuencia PWM, el
valor mínimo que debe tener el prescalizador para no superar el tamaño del timer de 16 bits es
Seleccione una respuesta.
a. 2.
b. 4.
c. 16.
d. 8.
Con las condiciones dadas el contador debería contar 480000 ciclos (24000000/50) el conteo
máximo es 65535 (16 bits), con un prescalizador de 8 contaría hasta 60000 y sería el mínimo con
las opciones dadas.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 10
Puntos: 1
En el direccionamiento indirecto, el campo de la instrucción contiene la dirección donde se
encuentra almacenada la dirección real del operando. Con esto ya es posible direccionar más
memoria, sin embargo se debe acceder dos veces a Memoria, la primera para obtener la dirección
y la otra para obtener el operando. El parámetro que tiene una instrucción en direccionamiento
indirecto es
Seleccione una respuesta.
a. un Operando para la ALU.
b. un dato para la pila.
c. un registro de información.
d. una dirección de memoria.
El parámetro en una instrucción en direccionamiento indirecto es una dirección de memoria, que
permite acceder al parámetro de operación.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 11
Puntos: 1
NO es paso de diseño de procesador
Seleccione una respuesta.
a. programar la memoria.
b. establecer el repertorio de instrucciones.
c. realizar la máquina de estados algorítmica.
d. diseñar el camino de datos.
La programación de la memoria se realiza luego de tener implementado el procesador.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 12
Puntos: 1
Todo equipo electrónico, y particularmente los equipos que manipulan señales de radio
frecuencia, conmutación electrónica, entre otras, sufren el inevitable mal de ruido por
interferencia electromagnética. La señal de 60Hz (50Hz) de la red de alimentación es el factor más
común, que perturba los sistemas electrónicos. Hoy en día los 220Hz, generados por la
conmutación de la fuente de los sistemas celulares, se constituyen en una de las altas fuentes
contaminantes para los circuitos electrónicos.
De acuerdo al presente problema la solución es
Seleccione una respuesta.
a. reducir el número de interrupciones de la aplicación.
b. reducir el número de instrucciones de un programa.
c. implementar filtros de desacople y adecuados diseños de PCBs.
d. Implementar un sistema operativo embebido.
Ante la interferencia de electromagnética la solución es trabajar en el filtraje de las señales sobre
circuito impreso PCB.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 13
Puntos: 1
Seleccione una respuesta.
a. f = D+CA’+C’A’+BA.
b. f = D+CA+C’A+BA.
c. f = D+CA+C’A’+BA.
d. f = D+C’A+C’A’+BA.
Se debe de realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por : ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 14
Puntos: 1
Una variable, pasada como parámetro a una función, no ve modificado su valor original durante la
ejecución (paso por valor, copia local) Para modificar, dentro de una función, el valor de una
variable externa a la función, se debe pasar por la referencia (pasar su dirección).
void suma(int a, int b, int *ps){*ps=a+b;}
void main(void) {... int s; suma(10,3, &s );...} /* s contendrá ahora un 13*/ basado en las dos
anteriores líneas de código ps contiene.
Seleccione una respuesta.
a. un parámetro de la suma.
b. el resultado de la suma.
c. la dirección de b.
d. la dirección de s.
Desde la invocación de la función suma, se observa que se envía como parámetro la dirección de s,
la cual es recibida desde la función en ps.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS

Incorrecto
Puntos para este envío: 0/1.
Question 15
Puntos: 1
El protocolo IIC es un sistema de comunicaciones que fue desarrollado por Philips como un
sistema multimaestro, para la conexión de periféricos a distancias relativamente cortas y
velocidades de unos cientos de Kbps El protocolo se implementa sobre dos líneas, una para el reloj
(SCL: Serial Clock) y otra para los datos (SDA: Serial Data). Esta definición lo configura como un
sistema bidireccional del tipo maestro/esclavo. En la última década se ha venido dando un
importante giro en la interconectividad de periféricos con los PC, de tal manera que interfaces
como el puerto paralelo, serial RS232, entre otros, han desaparecido de los computadores. En su
reemplazo, la interface USB (Universal Serial Bus) se ha convertido en la manera más popular para
conectar dispositivos periféricos a un computador personal o a otros dispositivos periféricos.
Para una comunicación entre un MCU y un chip en la tarjeta se debe usar comunicación serial
Seleccione una respuesta.
a. IR.
b. USB.
c. RS232.
d. IIC.
La comunicación IIC está diseñada para comunicaciones de alta velocidad en el mismo circuito
impreso.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Comenzado el miércoles, 29 de octubre de 2014, 11:50
Completado el miércoles, 29 de octubre de 2014, 11:50
Tiempo empleado 4 segundos

Puntos 0/15
Calificación 0 de un máximo de 5 (0%)
Question 1
Puntos: 1
Seleccione una respuesta.
a. f = D+CA+C’A’+BA.
b. f = D+CA+C’A+BA.
c. f = D+CA’+C’A’+BA.
d. f = D+C’A+C’A’+BA.
Se debe de realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por : ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 2
Puntos: 1
Algunos sistemas embebidos incluyen un sistema operativo, que se conoce como sistema
operativo embebido. Un sistema operativo es definido como una capa de software que permite

multiplexor abstracciones de hardware como: memoria volátil, ciclos de procesador, dispositivos
de entrada salida, etc., para los programas de aplicación. Un sistema operativo embebido debe
realizar las operaciones expuestas anteriormente, pero en un ambiente donde los programas de
aplicaciones poseen numerosas restricciones, particularmente en cuanto a consideraciones de
tiempo y energía.
A partir de esto el sistema operativo embebido es
Seleccione una respuesta.
a. un controlador de periféricos de la CPU.
b. un controlador de recursos de aplicaciones.
c. un programa de aplicación con restricciones.
d. un administrador de tiempo y energía.
El sistema operativo embebido es una capa de software que administra o controla los recursos de
las aplicaciones del sistema embebido.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 3
Puntos: 1
Los array son punteros constantes (no variables) que permiten acceder, de una manera indexada,
a una zona de memoria reservada por el compilador automáticamente. Dicho puntero constante
equivale a la dirección de comienzo del array, por ser una constante, este puntero no se inicializa;
se inicializa el contenido de la zona de memoria apuntada.
Para copiar un array en otro array bastaría con
Seleccione una respuesta.
a. asignar el elemento medio.
b. copiar el puntero a la posición inicial.
c. copiar elemento a elemento en un bucle.
d. inicializar el puntero con la zona de memora.
Para copiar un array en otro es necesario copiar elemento a elemento con un bucle.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 4
Puntos: 1
Del siguiente programa en lenguaje ensamblador se puede decir que la memoria se llena desde
Seleccione una respuesta.
a. $0 hasta $F con valores de $0 hasta $F de forma cíclica.
b. $0 hasta $F con valores de $B0 hasta $BF de forma cíclica.
c. $B0 hasta $BF con valores de $B0 hasta $BF de forma cíclica.
d. $B0 hasta $BF con valores de $0 hasta $F de forma cíclica.
El registro indexado se carga con el valor de $B0 y siguiente a esto se limpia esta dirección, luego
se mueve el valor actual de $B0 a $B0 y queda apuntado H:X a la siguiente posición de memoria.
Siguiente a esto se incrementa el valor de $B0 con (1,2,3……) y se compara el registro indexado
con el valor $D0 si es igual salta a la etiqueta PROM donde se limpia la posición de memoria $D0 y
se repite el ciclo completo, y si no repite el ciclo desde la etiqueta INICIO, con lo que la memoria se
llenara con $0 en $D0 hasta $F en $DF .
ELABORADO POR: RODRÍGUEZ DÍAZ CAMILO ARTURO
Incorrecto
Puntos para este envío: 0/1.
Question 5
Puntos: 1
El registro PC o contador de programa es aquel que contiene la dirección de la siguiente
instrucción u operando a ser ejecutado, normalmente la dirección en el contador de programa
incrementa secuencialmente a la siguiente posición de memoria.
Con base a lo anterior un evento que NO modifica el contador de programa es
Seleccione una respuesta.
a. un Jump.
b. una interrupción.
c. un Branch.
d. una suma.
Este evento no afecta el incremento secuencial del PC porque al ser ejecutado el PC queda
apuntando a la siguiente instrucción u operando. Con esta instrucción el programa se ejecuta
secuencialmente.
Incorrecto
Puntos para este envío: 0/1.
Question 6
Puntos: 1
El protocolo IIC es un sistema de comunicaciones que fue desarrollado por Philips como un
sistema multimaestro, para la conexión de periféricos a distancias relativamente cortas y
velocidades de unos cientos de Kbps El protocolo se implementa sobre dos líneas, una para el reloj
(SCL: Serial Clock) y otra para los datos (SDA: Serial Data). Esta definición lo configura como un
sistema bidireccional del tipo maestro/esclavo. En la última década se ha venido dando un
importante giro en la interconectividad de periféricos con los PC, de tal manera que interfaces
como el puerto paralelo, serial RS232, entre otros, han desaparecido de los computadores. En su
reemplazo, la interface USB (Universal Serial Bus) se ha convertido en la manera más popular para
conectar dispositivos periféricos a un computador personal o a otros dispositivos periféricos.

Para una comunicación entre un MCU y un chip en la tarjeta se debe usar comunicación serial
Seleccione una respuesta.
a. USB.
b. IR.
c. RS232.
d. IIC.
La comunicación IIC está diseñada para comunicaciones de alta velocidad en el mismo circuito
impreso.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 7
Puntos: 1
Hacer una multiplicación en un procesador de 8 bits, de las décadas de los 70 y 80 significaba un
gran gasto de operaciones de suma, resta y desplazamiento en forma iterativa. Con consumos de
cientos de ciclos de máquina. En la actualidad las máquinas pueden hacer una multiplicación en 4
ciclos de máquina o menos, con instrucciones específicas para tal propósito.
Seleccione una respuesta.
a. instrucciones iterativas suma.
b. gasto de varios ciclos de máquina.
c. desplazamientos iterativos.
d. hardware especifico para reducir los ciclos.
Los actuales microcontroladores usan hardware especifico para realizar la multiplicación en
máximo 4 ciclos
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.
Question 8
Puntos: 1
El apuntador a la pila es un registro de 16 bits en la CPU HCS08, usado para apuntar a la siguiente
posición disponible en la pila con una secuencia LIFO (Ultimo en entrar primero en salir), cuando la
CPU salta a una subrutina (JSR) almacena la dirección actual en la pila, y el retorno se hace con
(RTS). De acuerdo a lo anterior si en una aplicación se realizan 4 saltos anidados, subrutinas
llamadas así: (Inicio) Sub1, Sub2, Sub3 y Sub4, la secuencia como se libera la pila hasta llegar al
punto de inicio es
Seleccione una respuesta.
a. Sub4, Sub3, Sub2, Sub1.
b. Sub1, Sub2, Sub4, Sub3.
c. Sub3, Sub4, Sub2, Sub1.
d. Sub1, Sub2, Sub3, Sub4.
Al ser la pila de tipo LIFO saldrá primero la ultima en entrar es decir primero Sub4, luego Sub3,
Sub2 y por ultimo Sub1.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 9
Puntos: 1
NO es paso de diseño de procesador
Seleccione una respuesta.
a. establecer el repertorio de instrucciones.
b. realizar la máquina de estados algorítmica.
c. diseñar el camino de datos.
d. programar la memoria.
La programación de la memoria se realiza luego de tener implementado el procesador.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 10
Puntos: 1
El Acumulador (A) es el registro de propósito general primario en la CPU HCS08, el cual se puede
cargar con la instrucción LDA, o desde la pila con PULA, y puede escribir en memoria con la
instrucción STA y en la pila con PSHA. Dada la información anterior si se quiere hacer un
movimiento de memoria a memoria usando el acumulador pero si alterar su valor inicial, la
secuencia de instrucciones debe ser
Seleccione una respuesta.
a. LDA, STA, PULA, PSHA.
b. PULA, LDA, PSHA, STA.
c. PSHA, LDA, STA, PULA.
d. LDA, PULA, PSHA, STA.
El proceso inicia con salvar en la pila el valor del acumulador (LDA), luego leer la posición de
memoria (LDA), y transferirlo a la siguiente posición (STA) y finalmente restaurar el acumulador
con (PULA).
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 11
Puntos: 1
la siguiente es una rutina de transmisión serial en lenguaje C del modulo SCI de HCS08.
De la rutina anterior se puede afirmar que, las condiciones para terminar una transmisión son
Seleccione una respuesta.
a. que los bits SCI1SC y TDRE sean 1.
b. que el bit TDRE y TC sean 1.
c. que los bits SCI1SC y TC sean 0.
d. que el bit TDRE y TC sean 0.
SCI1S1_TDRE hace referencia al bit TDRE de SCI1S1 y SCI1S1_TC hace referencia al bit TC de
SCI1S1, el simbolo ! dentro del while; crea un espera mientras el valor es 0, cuando pasan ambos
bits se termina la función.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 12
Puntos: 1
El resultado de realizar la multiplicación de los números binarios 1010 y 1101 es
Seleccione una respuesta.
a. 10000010.
b. 10000011.
c. 10000001.
d. 10000110.
Elaborado por:Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 13
Puntos: 1
Siendo A una variable de tipo booleana, la premisa falsa es
Seleccione una respuesta.
a. A*0=0.
b. A*1=A.
c. A+1=A.
d. A+0=A.
En lógica booleana la adición de 1 con una variable booleana es 1.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 14
Puntos: 1
Todo equipo electrónico, y particularmente los equipos que manipulan señales de radio
frecuencia, conmutación electrónica, entre otras, sufren el inevitable mal de ruido por
interferencia electromagnética. La señal de 60Hz (50Hz) de la red de alimentación es el factor más
común, que perturba los sistemas electrónicos. Hoy en día los 220Hz, generados por la
conmutación de la fuente de los sistemas celulares, se constituyen en una de las altas fuentes
contaminantes para los circuitos electrónicos.
De acuerdo al presente problema la solución es
Seleccione una respuesta.
a. implementar filtros de desacople y adecuados diseños de PCBs.
b. reducir el número de interrupciones de la aplicación.
c. Implementar un sistema operativo embebido.
d. reducir el número de instrucciones de un programa.
Ante la interferencia de electromagnética la solución es trabajar en el filtraje de las señales sobre
circuito impreso PCB.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 15
Puntos: 1
La simplificación de la siguiente expresión F=C’AB+CAB+CA’B+CAB’ es
Seleccione una respuesta.
a. F = AB+CB+A.
b. F = AB+CB+CA+CAB.
c. F = AB+CB+CA.
d. F = AB+CB.
Se debe realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por: ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Comenzado el miércoles, 29 de octubre de 2014, 13:45
Completado el miércoles, 29 de octubre de 2014, 13:46
Tiempo empleado 23 segundos
Puntos 2/15
Calificación 0.67 de un máximo de 5 (13%)
Question 1
Puntos: 1
El apuntador a la pila es un registro de 16 bits en la CPU HCS08, usado para apuntar a la siguiente
posición disponible en la pila con una secuencia LIFO (Ultimo en entrar primero en salir), cuando la
CPU salta a una subrutina (JSR) almacena la dirección actual en la pila, y el retorno se hace con
(RTS). De acuerdo a lo anterior si en una aplicación se realizan 4 saltos anidados, subrutinas
llamadas así: (Inicio) Sub1, Sub2, Sub3 y Sub4, la secuencia como se libera la pila hasta llegar al
punto de inicio es
Seleccione una respuesta.
a. Sub4, Sub3, Sub2, Sub1.
b. Sub1, Sub2, Sub4, Sub3.
c. Sub3, Sub4, Sub2, Sub1.
d. Sub1, Sub2, Sub3, Sub4.
Al ser la pila de tipo LIFO saldrá primero la ultima en entrar es decir primero Sub4, luego Sub3,
Sub2 y por ultimo Sub1.
Elaborado por: Carlos Andrés Cifuentes García
Correcto
Puntos para este envío: 1/1.
Question 2
Puntos: 1
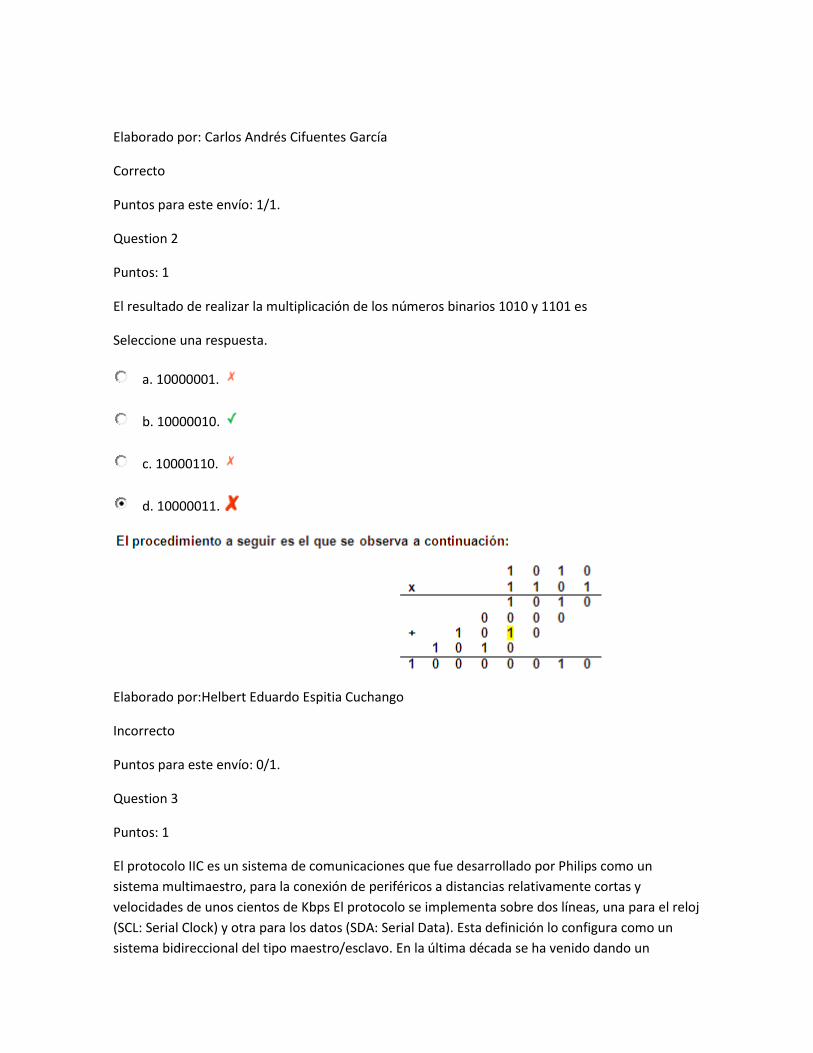
El resultado de realizar la multiplicación de los números binarios 1010 y 1101 es
Seleccione una respuesta.
a. 10000001.
b. 10000010.
c. 10000110.
d. 10000011.
Elaborado por:Helbert Eduardo Espitia Cuchango
Incorrecto
Puntos para este envío: 0/1.
Question 3
Puntos: 1
El protocolo IIC es un sistema de comunicaciones que fue desarrollado por Philips como un
sistema multimaestro, para la conexión de periféricos a distancias relativamente cortas y
velocidades de unos cientos de Kbps El protocolo se implementa sobre dos líneas, una para el reloj
(SCL: Serial Clock) y otra para los datos (SDA: Serial Data). Esta definición lo configura como un
sistema bidireccional del tipo maestro/esclavo. En la última década se ha venido dando un
importante giro en la interconectividad de periféricos con los PC, de tal manera que interfaces
como el puerto paralelo, serial RS232, entre otros, han desaparecido de los computadores. En su
reemplazo, la interface USB (Universal Serial Bus) se ha convertido en la manera más popular para
conectar dispositivos periféricos a un computador personal o a otros dispositivos periféricos.
Para una comunicación entre un MCU y un chip en la tarjeta se debe usar comunicación serial
Seleccione una respuesta.
a. RS232.
b. USB.
c. IR.
d. IIC.
La comunicación IIC está diseñada para comunicaciones de alta velocidad en el mismo circuito
impreso.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 4
Puntos: 1
El registro SP (stack pointer) o apuntador de pila es un registro de 16 bits tipo LIFO el cual contiene
la dirección de la siguiente posición en la pila. El SP siempre apunta al siguiente byte disponible o
vacio y durante un reset apunta a la última posición en la pila.
Con lo anterior se puede decir que si se saca un dato de la pila previamente almacenado el SP
Seleccione una respuesta.
a. se limpia.
b. se decrementa.
c. apunta a la siguiente posición.
d. se incrementa.
Cuando un dato es sacado de la pila el SP debe incrementarse, ya que este registro es de tipo LIFO
(Last in first out), ultimo en entrar primero en salir. Como el SP durante un reset apunta a la última
posición de memoria, Si se almacenaron n datos en la pila el SP decremento hasta quedar
apuntando a la siguiente posición disponible, pero al sacar el dato debe limpiar la posición
anterior, es decir se debe incrementar.
ELABORADO POR: RODRÍGUEZ DÍAZ CAMILO ARTURO
Incorrecto
Puntos para este envío: 0/1.
Question 5
Puntos: 1
En un modulo timer que se basa en un contador de 16 bits para la generación una señal de PWM
se tiene en cuenta la frecuencia de bus del microcontrolador, el prescalizador que es un divisor de
la frecuencia de bus, y el periodo que se desee para la señal de PWM. Dado lo anterior si se está
basado en un frecuencia de bus de 24Mhz y con el requerimiento de 50Hz de frecuencia PWM, el
valor mínimo que debe tener el prescalizador para no superar el tamaño del timer de 16 bits es
Seleccione una respuesta.
a. 16.
b. 8.
c. 4.
d. 2.
Con las condiciones dadas el contador debería contar 480000 ciclos (24000000/50) el conteo
máximo es 65535 (16 bits), con un prescalizador de 8 contaría hasta 60000 y sería el mínimo con
las opciones dadas.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 6
Puntos: 1
Seleccione una respuesta.
a. f = D+CA+C’A’+BA.
b. f = D+CA’+C’A’+BA.
c. f = D+CA+C’A+BA.
d. f = D+C’A+C’A’+BA.
Se debe de realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por : ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 7
Puntos: 1
Los array son punteros constantes (no variables) que permiten acceder, de una manera indexada,
a una zona de memoria reservada por el compilador automáticamente. Dicho puntero constante
equivale a la dirección de comienzo del array, por ser una constante, este puntero no se inicializa;
se inicializa el contenido de la zona de memoria apuntada.
Para copiar un array en otro array bastaría con
Seleccione una respuesta.
a. copiar el puntero a la posición inicial.
b. asignar el elemento medio.
c. inicializar el puntero con la zona de memora.
d. copiar elemento a elemento en un bucle.
Para copiar un array en otro es necesario copiar elemento a elemento con un bucle.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS
Correcto
Puntos para este envío: 1/1.
Question 8
Puntos: 1
Algunos sistemas embebidos incluyen un sistema operativo, que se conoce como sistema
operativo embebido. Un sistema operativo es definido como una capa de software que permite
multiplexor abstracciones de hardware como: memoria volátil, ciclos de procesador, dispositivos
de entrada salida, etc., para los programas de aplicación. Un sistema operativo embebido debe
realizar las operaciones expuestas anteriormente, pero en un ambiente donde los programas de
aplicaciones poseen numerosas restricciones, particularmente en cuanto a consideraciones de
tiempo y energía.
A partir de esto el sistema operativo embebido es
Seleccione una respuesta.
a. un controlador de periféricos de la CPU.
b. un controlador de recursos de aplicaciones.
c. un administrador de tiempo y energía.
d. un programa de aplicación con restricciones.

El sistema operativo embebido es una capa de software que administra o controla los recursos de
las aplicaciones del sistema embebido.
ELABORADO POR: CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 9
Puntos: 1
La simplificación de la siguiente expresión F=C’AB+CAB+CA’B+CAB’ es
Seleccione una respuesta.
a. F = AB+CB+A.
b. F = AB+CB.
c. F = AB+CB+CA+CAB.
d. F = AB+CB+CA.
Se debe realizar la reducción por mapa de Karnaugh para encontrar la respuesta.
Elaborado por: ESPITIA CUCHANGO HELBERT EDUARDO.
Incorrecto
Puntos para este envío: 0/1.
Question 10
Puntos: 1
En la arquitectura del procesador el elemento que tiene dominio directo sobre las direcciones de
la memoria del programa es
Seleccione una respuesta.
a. el contador del programa.
b. el registro de instrucción.

c. la unidad de control.
d. el acumulador.
C: El contador del programa es el elemento que ejerce control sobre las direcciones del la
memoria de programa.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 11
Puntos: 1
Una variable, pasada como parámetro a una función, no ve modificado su valor original durante la
ejecución (paso por valor, copia local) Para modificar, dentro de una función, el valor de una
variable externa a la función, se debe pasar por la referencia (pasar su dirección).
void suma(int a, int b, int *ps){*ps=a+b;}
void main(void) {... int s; suma(10,3, &s );...} /* s contendrá ahora un 13*/ basado en las dos
anteriores líneas de código ps contiene.
Seleccione una respuesta.
a. un parámetro de la suma.
b. el resultado de la suma.
c. la dirección de b.
d. la dirección de s.
Desde la invocación de la función suma, se observa que se envía como parámetro la dirección de s,
la cual es recibida desde la función en ps.
ELABORADO POR:CIFUENTES GARCÍA CARLOS ANDRÉS
Incorrecto
Puntos para este envío: 0/1.
Question 12
Puntos: 1
Siendo A una variable de tipo booleana, la premisa falsa es
Seleccione una respuesta.
a. A*0=0.
b. A+1=A.
c. A*1=A.
d. A+0=A.
En lógica booleana la adición de 1 con una variable booleana es 1.
ELABORADO POR: ESPITIA CUCHANGO HELBERT EDUARDO
Incorrecto
Puntos para este envío: 0/1.
Question 13
Puntos: 1
Direccionamiento directo a registro: En algunas máquinas se limita éste direccionamiento a la
página cero del mapa de memoria. La página cero es el área de la memoria comprendida entre la
dirección 00H hasta la dirección FFH, es decir, las primeras 256 celdas. El direccionamiento
consiste en intercambiar u operar información entre los registros de la máquina y la memoria. El
direccionamiento directo es, por excelencia, uno de los más rápidos en ejecución que tienen las
máquinas. El direccionamiento directo se caracteriza por
Seleccione una respuesta.
a. realizar operaciones en toda la memoria.
b. realizar operaciones con un solo byte de direcciones.
c. realizar operaciones que implican amplia duración.
d. realizar saltos en cualquier dirección de la memoria.
Un solo byte de direcciones, es decir a accede a las primeras 256 posiciones de la memoria.
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.
Question 14
Puntos: 1
Seleccione una respuesta.
a. [0:C].
b. [0:B].
c. [0:F].
d. [0:9].
El ASCII del 0 al 9 está entre 0x30 y 0x39, la A continua en 0x40 y así hasta la F, por lo cual hasta 9
hace una buena conversión.
Elaborado por: Carlos Andrés Cifuentes García
Incorrecto
Puntos para este envío: 0/1.
Question 15
Puntos: 1
Hacer una multiplicación en un procesador de 8 bits, de las décadas de los 70 y 80 significaba un
gran gasto de operaciones de suma, resta y desplazamiento en forma iterativa. Con consumos de
cientos de ciclos de máquina. En la actualidad las máquinas pueden hacer una multiplicación en 4
ciclos de máquina o menos, con instrucciones específicas para tal propósito.
Seleccione una respuesta.
a. hardware especifico para reducir los ciclos.
b. desplazamientos iterativos.
c. gasto de varios ciclos de máquina.
d. instrucciones iterativas suma.
Los actuales microcontroladores usan hardware especifico para realizar la multiplicación en
máximo 4 ciclos
Diseñado por: Camilo Arturo Rodríguez Díaz
Incorrecto
Puntos para este envío: 0/1.