






Idiomas
Páginas
Jurídico

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 1/28
SISTEMASFLEXIBLES DEMANUFACTURA
2015
Autores: Christ ian Fonseca
Andrés Hid rovo
Henry Parrales
Pablo Miranda
Juan Carlos Vela

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 2/28
2
Contenido
INDICE DE FIGURAS ....................................................................................................................... 3
Tema ................................................................................................................................................ 5
OBJETIVOS ..................................................................................................................................... 5
MATERIALES Y EQUIPOS ............................................................................................................... 5
MARCO TEÓRICO ........................................................................................................................... 5
• C giro en torno al eje X. (INALI) ................................................................................................ 10
VENTAJAS DE MEDICIÓN DE LA BASE: ................................................................................. 14
MÉTODOS DE MEDICIÓN DE LA BASE ................................................................................... 16
MEDICIÓN DE LOS 3 PUNTOS ................................................................................................. 16
PROGRAMACIÓN DEL ROBOT ................................................................................................ 16
PROCEDIMIENTO ......................................................................................................................... 22
ANÁLISIS DE RESULTADOS ......................................................................................................... 26
CONCLUSIONES ........................................................................................................................... 27
RECOMENDACIONES ................................................................................................................... 27
BIBLIOGRAFÍA ............................................................................................................................... 28
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 3/28

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 4/28
4
Figura 38 Botones de trabajo .......................................................................................................... 26
Figura 39 Control de movimientos .................................................................................................. 26
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 5/28
5
Tema
Operación y programación de manipuladores robóticos
OBJETIVOS
Familiarizarse con el brazo robótico KUKA KR5: KCP (KUKA Control Panel), partes. Realizar la manipulación del brazo robótico KUKA KR5 en los diferentes modos de
movimientos que realiza el mismo.
Realizar movimientos programados mediante la programación punto a punto, lineal y
circulares de los diferentes ejes.
MATERIALES Y EQUIPOS
1. Brazo Robótico KUKA KR5
2. Manual de Operación y herramienta
3. KCP
4. Armario de Control
MARCO TEÓRICO
EL ROBOT Y SU FUNCIONAMIENTO
1. Sistema mecánico articulado dotado de sus motores (eléctricos, hidráulicos o neumáticos) que
arrastran a las articulaciones del robot mediante las transmisiones (cables, cintas, correas con
muescas). Para conocer en todo instante la posición de las articulaciones se recurre a los
captadores (codificadores ópticos) que se denominan propioceptivos. Estos dan el valor a las
articulaciones, que no es más que la configuración o el estado del robot.
2. El entorno es el universo en que está sumergida la primera entidad. Si los robots están sobre un
puesto fijo se reduce al espacio alcanzable por el robot. En él el robot puede encontrar obstáculos
que ha de evitar y objetos de interés, o sea los objetos con los que tiene que actuar. Por todo esto
existe interacción entre la parte física y el entorno. Mediante los captadores interoceptivos
(cámaras, detectores de fuerzas, detectores de proximidad, captadores táctiles) se toman
informaciones sobre el entorno.
3. Las tareas a realizar es el trabajo que se desea que haga el robot. La descripción de estas
tareas se hace mediante lenguajes que pueden ser a través de los gestos, en el que se le enseña
al robot lo que se debe hacer; orales, se le habla; por escrito en el que se le escriben las
instrucciones en un lenguaje compatible con el robot.

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 6/28
6
4. El cerebro del robot es el órgano de tratamiento de la información. Este puede ser desde un
autómata programable para los menos avanzados hasta un miniordenor numérico o
microprocesador para los más avanzados. El cerebro, es el que tiene el papel principal, contiene en
sus memorias:
− Un modelo del robot físico: las señales de excitación de los accionamientos y losdesplazamientos que son consecuencia de ellas.
− Un modelo del entorno: descripción de lo que se encuentra en el espacio que puede alcanzar.
− Programas: permite comprender las tareas que se le pide que realice. Algoritmos de control.
(Escuela Universitaria de Ingeniería Técnica Industrial de Zaragoza)
DESCRIPCIÓN DEL KCP (KUKA CONTROL PANEL)
El panel de control KUKA es la interfaz al controlador del robot y el robot. Los elementos para la
programación y operación del sistema robot, con excepción del interruptor principal están
presentados en esta imagen.
Figura 1 Descripción del KCP
1.1. Barra de estado.
1.2. Accionamientos arriba-derecha.
1.3. Teclas izquierdas.
1.4 Parte inferior.
1.4.1 Campo numérico
1.4.2 Teclado
1.4.3 Teclas de cursor
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 7/28
7
1.4.4 Tecla de entrada
1.5 Teclas alrededor de la pantalla.
1.5.1 Teclas de grupos de menús
1.5.2 Teclas de funciones de estado derecha
1.5.3 Softkeys
1.5.4 Teclas de funciones de estado izquierda1.6 Space mouse-ratón
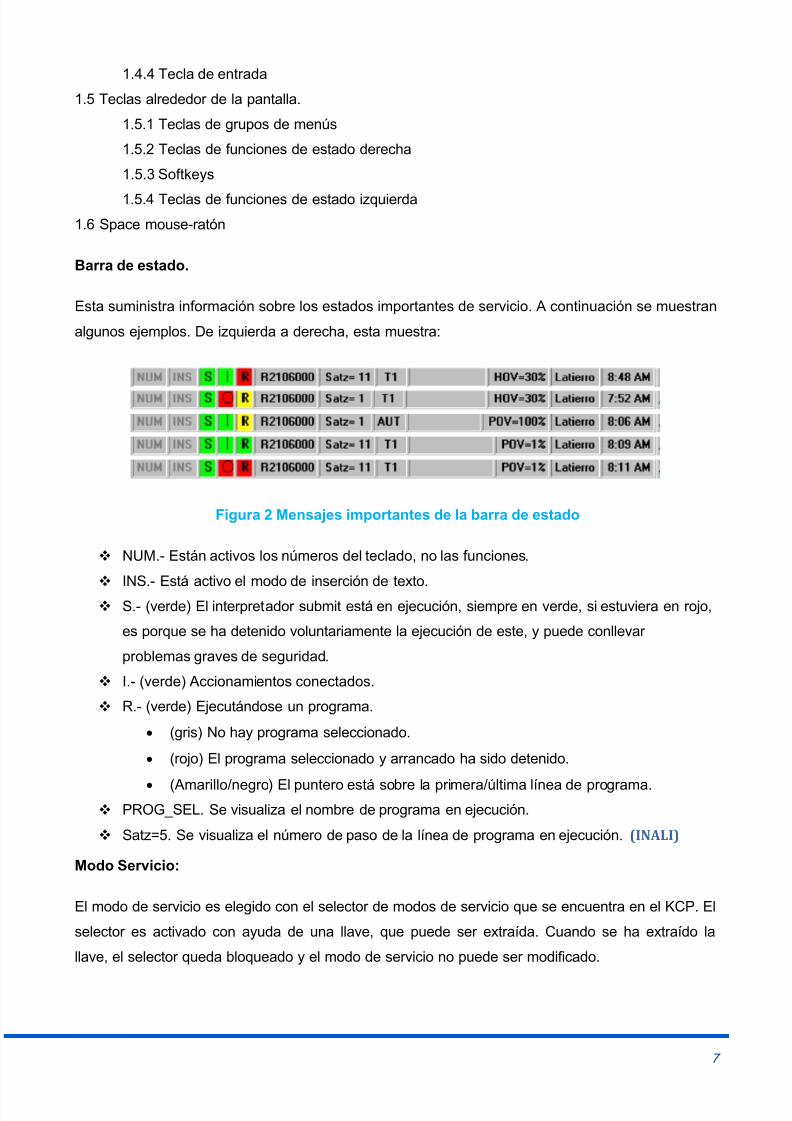
Barra de estado.
Esta suministra información sobre los estados importantes de servicio. A continuación se muestran
algunos ejemplos. De izquierda a derecha, esta muestra:
Figura 2 Mensajes importantes de la barra de estado
NUM.- Están activos los números del teclado, no las funciones.
INS.- Está activo el modo de inserción de texto.
S.- (verde) El interpretador submit está en ejecución, siempre en verde, si estuviera en rojo,
es porque se ha detenido voluntariamente la ejecución de este, y puede conllevar
problemas graves de seguridad.
I.- (verde) Accionamientos conectados.
R.- (verde) Ejecutándose un programa.
(gris) No hay programa seleccionado.
(rojo) El programa seleccionado y arrancado ha sido detenido.
(Amarillo/negro) El puntero está sobre la primera/última línea de programa. PROG_SEL. Se visualiza el nombre de programa en ejecución.
Satz=5. Se visualiza el número de paso de la línea de programa en ejecución. (INALI)
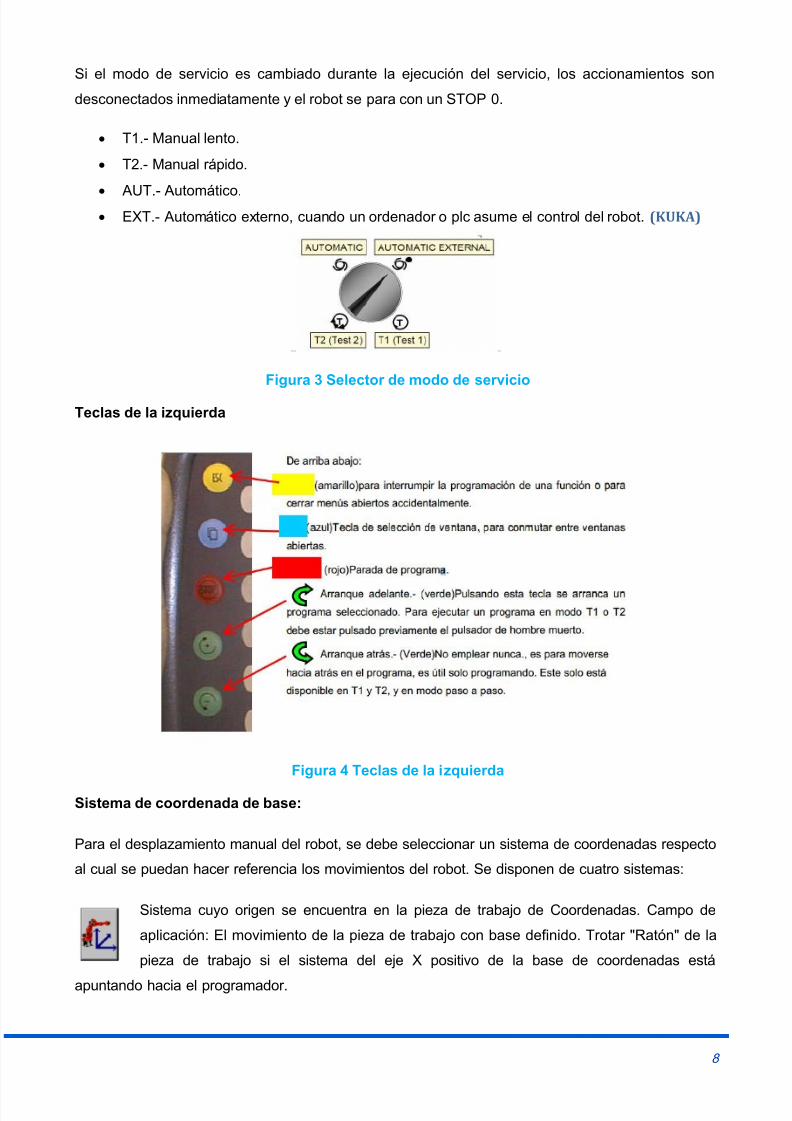
Modo Servicio:
El modo de servicio es elegido con el selector de modos de servicio que se encuentra en el KCP. El
selector es activado con ayuda de una llave, que puede ser extraída. Cuando se ha extraído la
llave, el selector queda bloqueado y el modo de servicio no puede ser modificado.
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 8/28
8
Si el modo de servicio es cambiado durante la ejecución del servicio, los accionamientos son
desconectados inmediatamente y el robot se para con un STOP 0.
T1.- Manual lento.
T2.- Manual rápido.
AUT.- Automático. EXT.- Automático externo, cuando un ordenador o plc asume el control del robot. (KUKA)
Figura 3 Selector de modo de servicio
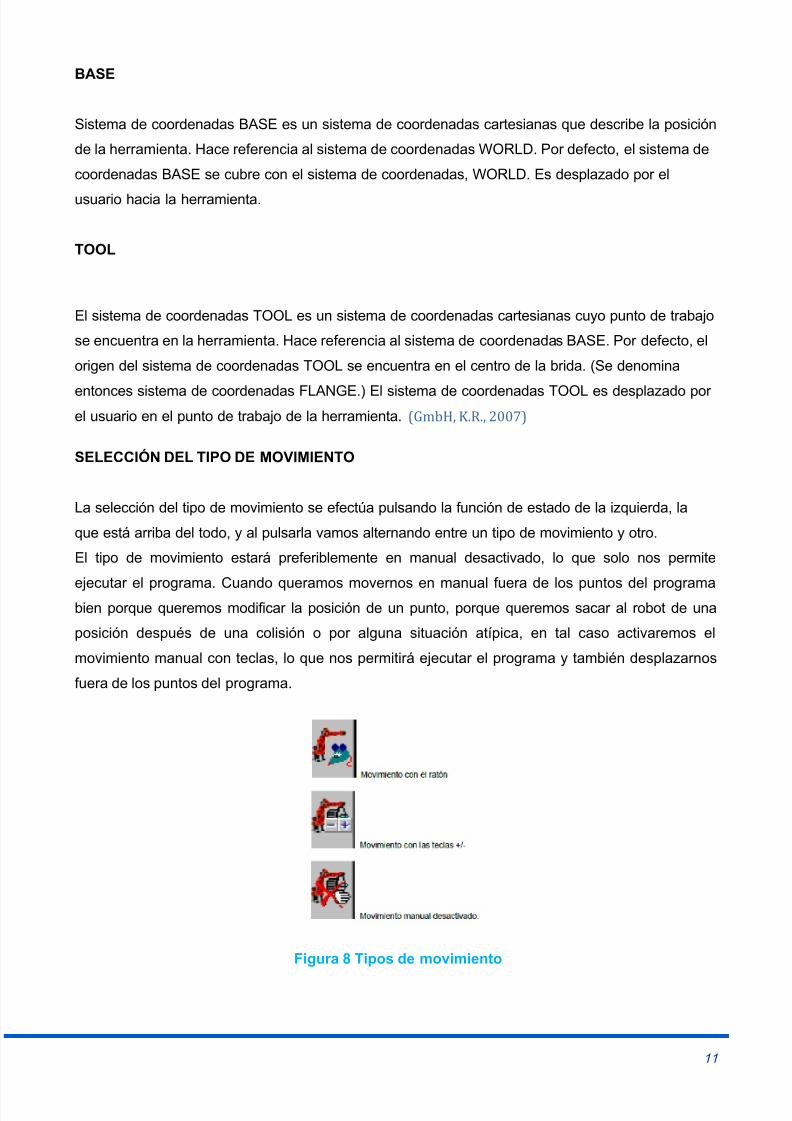
Teclas de la izquierda
Figura 4 Teclas de la izquierda
Sistema de coordenada de base:
Para el desplazamiento manual del robot, se debe seleccionar un sistema de coordenadas respecto
al cual se puedan hacer referencia los movimientos del robot. Se disponen de cuatro sistemas:
Sistema cuyo origen se encuentra en la pieza de trabajo de Coordenadas. Campo de
aplicación: El movimiento de la pieza de trabajo con base definido. Trotar "Ratón" de la
pieza de trabajo si el sistema del eje X positivo de la base de coordenadas está
apuntando hacia el programador.

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 9/28
9
Figura 5 Sistemas de coordenadas de la pieza
Sistema cuyo origen se encuentra en la herramienta del robot de coordenadas. Ámbito
de aplicación: de movimiento con la herramienta a lo largo de una línea recta si la
orientación de la herramienta se inclina. Punto de soldadura en la pieza de trabajo.
Funciones de pinzas sobre la pieza de trabajo. El movimiento de una pieza de trabajo en virtud deun TCP externo.
Figura 6 Sistemas de coordenadas de la herramienta
Sistema de coordenadas específicas de ejes, en el cual cada eje puede ser desplazado
individualmente en dirección positiva o negativa.
Sistema de coordenadas universales. Su origen se encuentra en la base del robot
Recordar que las rotaciones son:
• A giro en torno al eje Z.
• B giro en torno al eje Y.

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 10/28
10
• C giro en torno al eje X. (INALI)
En el sistema del robot se han definido los siguientes sistemas de coordenadas cartesianas:
WORLD
ROBROOT
BASE
TOOL
Figura 7 Sistemas de coordenadas en base al KUKA
WORLD
El sistema de coordenadas WORLD (sistema de coordenadas universales) es un sistema de
coordenadas cartesianas de definición fija. Es el sistema genérico de coordenadas para los
sistemas de coordenadas BASE y ROBROOT. Por defecto, el sistema de coordenadas WORLD se
encuentra en el pie del robot.
ROBROOT
El sistema de coordenadas ROBROOT es un sistema de coordenadas cartesianas que siempre se
encuentra en el pie del robot. Describe la posición del robot en relación al sistema de coordenadas
WORLD. Por defecto, el sistema de coordenadas ROBROOT se cubre con el sistema de
coordenadas WORLD. Con $ROBROOT puede definirse un corrimiento del robot respecto al
sistema de coordenadas WORLD.
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 11/28
11
BASE
Sistema de coordenadas BASE es un sistema de coordenadas cartesianas que describe la posición
de la herramienta. Hace referencia al sistema de coordenadas WORLD. Por defecto, el sistema de
coordenadas BASE se cubre con el sistema de coordenadas, WORLD. Es desplazado por el
usuario hacia la herramienta.
TOOL
El sistema de coordenadas TOOL es un sistema de coordenadas cartesianas cuyo punto de trabajo
se encuentra en la herramienta. Hace referencia al sistema de coordenadas BASE. Por defecto, el
origen del sistema de coordenadas TOOL se encuentra en el centro de la brida. (Se denomina
entonces sistema de coordenadas FLANGE.) El sistema de coordenadas TOOL es desplazado porel usuario en el punto de trabajo de la herramienta. (GmbH, K.R., 2007)
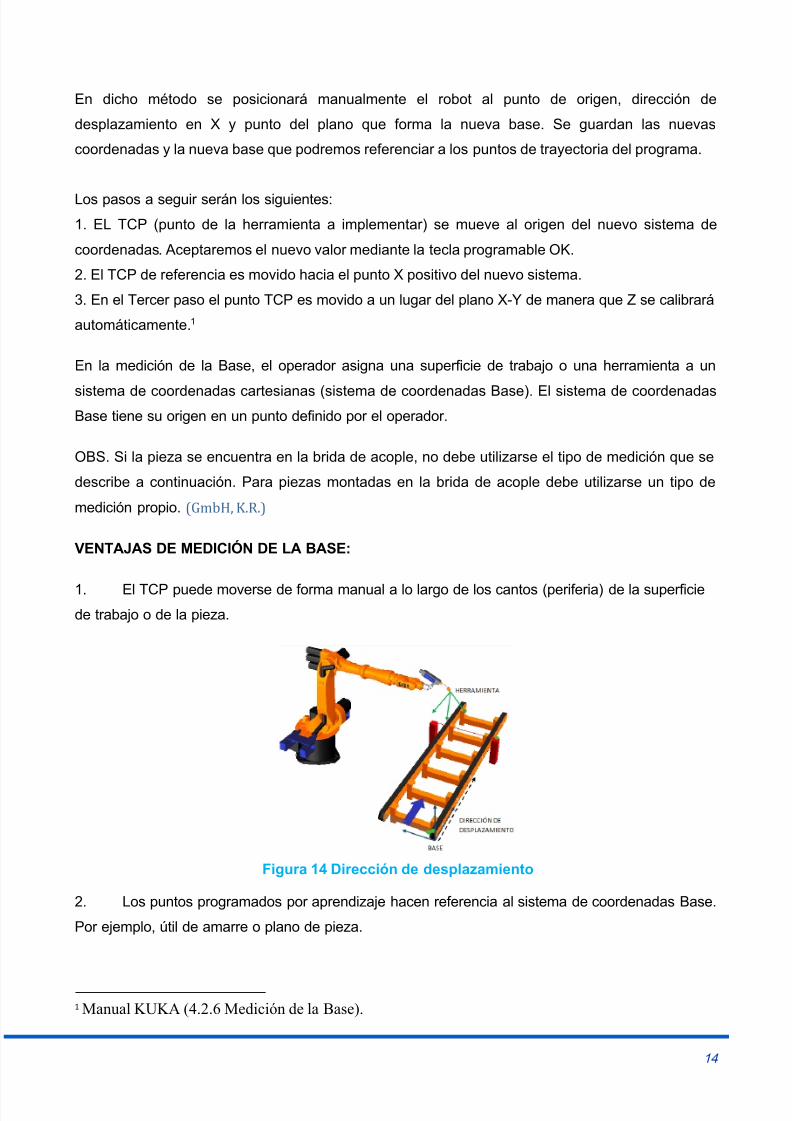
SELECCIÓN DEL TIPO DE MOVIMIENTO
La selección del tipo de movimiento se efectúa pulsando la función de estado de la izquierda, la
que está arriba del todo, y al pulsarla vamos alternando entre un tipo de movimiento y otro.
El tipo de movimiento estará preferiblemente en manual desactivado, lo que solo nos permite
ejecutar el programa. Cuando queramos movernos en manual fuera de los puntos del programabien porque queremos modificar la posición de un punto, porque queremos sacar al robot de una
posición después de una colisión o por alguna situación atípica, en tal caso activaremos el
movimiento manual con teclas, lo que nos permitirá ejecutar el programa y también desplazarnos
fuera de los puntos del programa.
Figura 8 Tipos de movimiento

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 12/28
12
MEDICIÓN DE LA HERRAMIENTA
La posición del punto central de la brida se describe por su distancia al punto de origen del sistema
de coordenadas universales (línea punteada). Esta distancia es descompuesta en sus
componentes X, Y y Z (línea de rayas).
Figura 9 Posición de la Herramienta
La orientación del sistema de coordenadas de la brida del robot, cuyo origen se encuentra en el
punto central de la brida, se describe por su giro (en ángulos Euler de Z, Y y X) respecto al sistema
de coordenadas universales.
Figura 10 Orientación de la Herramienta
Una posibilidad adicional de determinar los datos de la herramienta, consiste en acotar la misma
con ayuda de los sistemas de medición y las funciones de cálculo del robot.
Para ello, debe desplazarse la herramienta o pieza con su punto de referencia, a otro punto dereferencia, desde varias posiciones. Este último punto de referencia puede estar ubicado en
cualquier lugar dentro del campo de trabajo del robot.
Figura 11 Desplazamiento de la Herramienta

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 13/28
13
MEDICIÓN DE LA BASE
En la medición de la Base el operario asigna una superficie de trabajo o una herramienta a un
sistema de coordenadas cartesianas. El sistema de coordenadas BASE tiene su origen en un punto
definido por el Usuario.
Figura 12 Sistemas de Coordenadas Base
Las coordenadas de la pieza es un sistema el cual se mueve en relación a una pieza externa, el
sistema esta paralelamente y esta es acoplada matemáticamente y el movimiento según las teclas
de desplazamiento y el space mouse es igual al de la herramienta.
Para una instalación de robot es muy común el uso de bases, tantas como espacios de trabajo
existan. Esto es debido a que podemos cambiar el sistema de coordenadas cartesianas en base al
robot para que se muevan según la posición, de manera que podamos modificar los puntos
siempre paralelo y perpendicular al a la superficie. Por lo tanto nuestra área de trabajo recibirá un
sistema de coordenadas cuyo origen será definido por nosotros mismos, y cuyos puntos se
incrementarán con respecto a las direcciones de esa base.
Figura 13 Figura 5. Medición de una base
Para una instalación de robot es muy común el uso de bases, tantas como espacios de trabajo
existan. Esto es debido a que podemos cambiar el sistema de coordenadas cartesianas en base al
robot para que se muevan según la posición, de manera que podamos modificar los puntos
siempre paralelo y perpendicular al a la superficie. Por lo tanto nuestra área de trabajo recibirá un
sistema de coordenadas cuyo origen será definido por nosotros mismos, y cuyos puntos se
incrementarán con respecto a las direcciones de esa base.
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 14/28
14
En dicho método se posicionará manualmente el robot al punto de origen, dirección de
desplazamiento en X y punto del plano que forma la nueva base. Se guardan las nuevas
coordenadas y la nueva base que podremos referenciar a los puntos de trayectoria del programa.
Los pasos a seguir serán los siguientes:1. EL TCP (punto de la herramienta a implementar) se mueve al origen del nuevo sistema de
coordenadas. Aceptaremos el nuevo valor mediante la tecla programable OK.
2. El TCP de referencia es movido hacia el punto X positivo del nuevo sistema.
3. En el Tercer paso el punto TCP es movido a un lugar del plano X-Y de manera que Z se calibrará
automáticamente.1
En la medición de la Base, el operador asigna una superficie de trabajo o una herramienta a un
sistema de coordenadas cartesianas (sistema de coordenadas Base). El sistema de coordenadasBase tiene su origen en un punto definido por el operador.
OBS. Si la pieza se encuentra en la brida de acople, no debe utilizarse el tipo de medición que se
describe a continuación. Para piezas montadas en la brida de acople debe utilizarse un tipo de
medición propio. (GmbH, K.R.)
VENTAJAS DE MEDICIÓN DE LA BASE:
1. El TCP puede moverse de forma manual a lo largo de los cantos (periferia) de la superficiede trabajo o de la pieza.
Figura 14 Dirección de desplazamiento
2. Los puntos programados por aprendizaje hacen referencia al sistema de coordenadas Base.
Por ejemplo, útil de amarre o plano de pieza.
1 Manual KUKA (4.2.6 Medición de la Base).
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 15/28
15
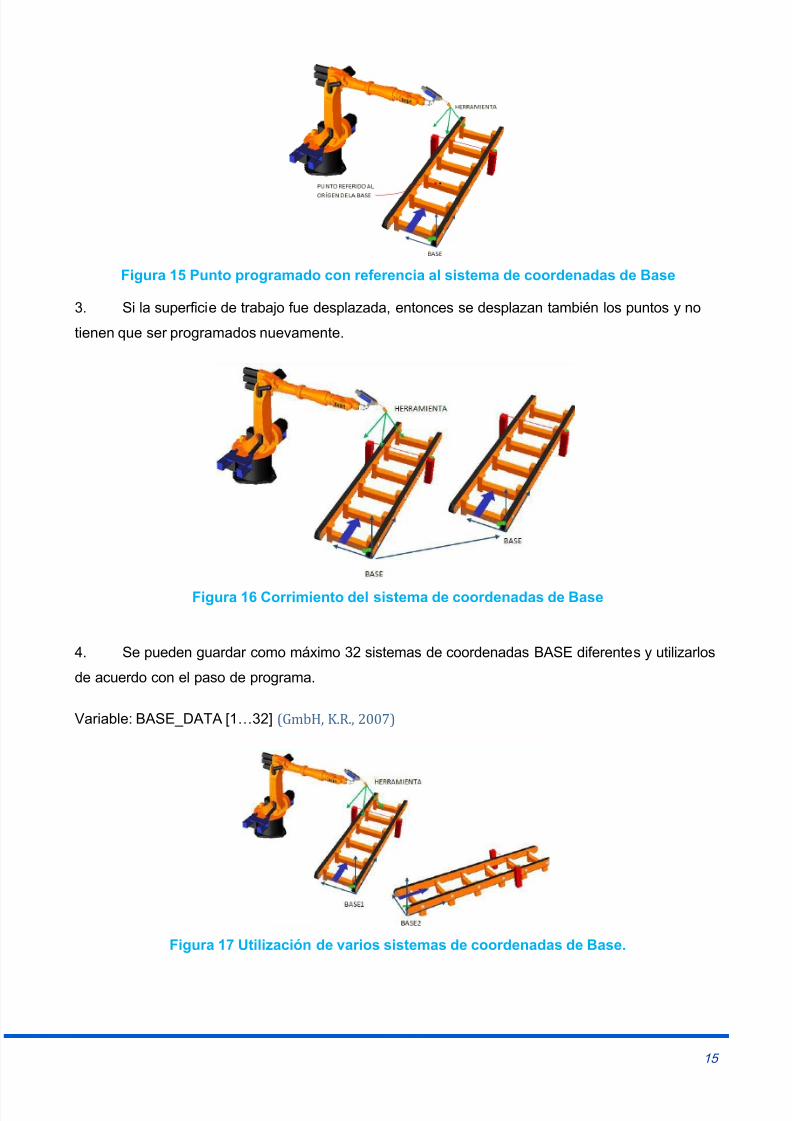
Figura 15 Punto programado con referencia al sistema de coordenadas de Base
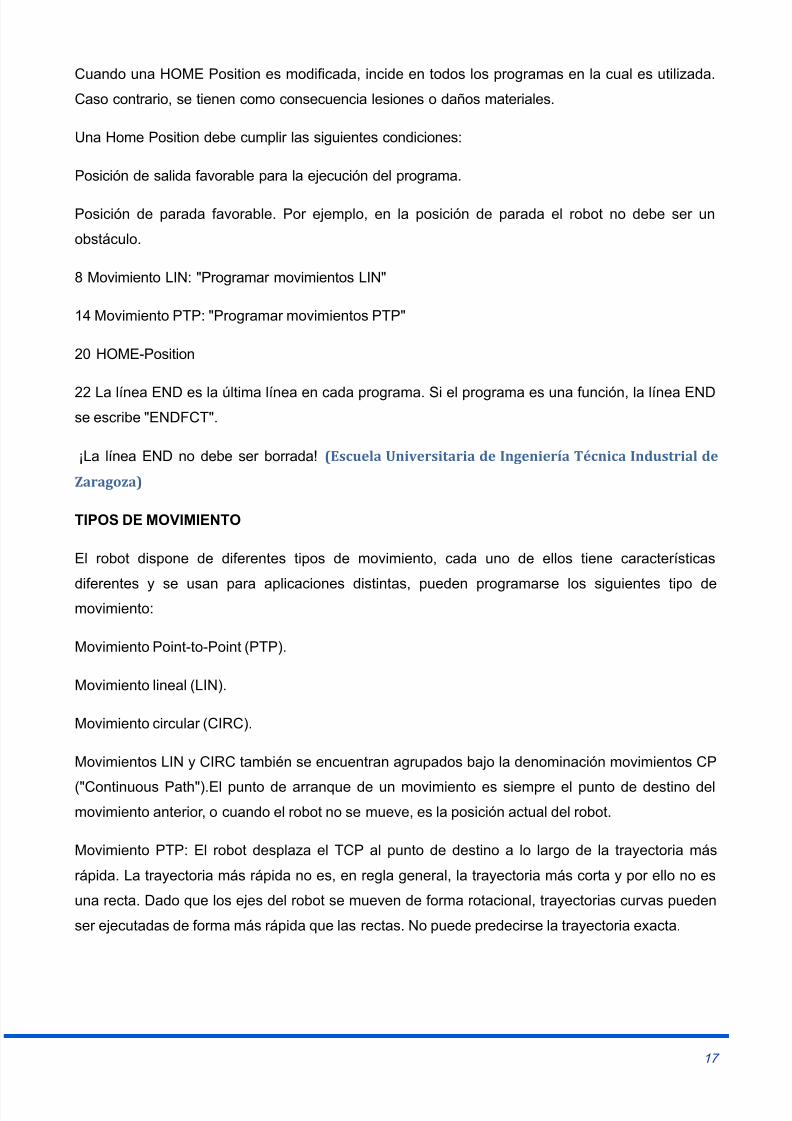
3. Si la superficie de trabajo fue desplazada, entonces se desplazan también los puntos y no
tienen que ser programados nuevamente.
Figura 16 Corrimiento del sistema de coordenadas de Base
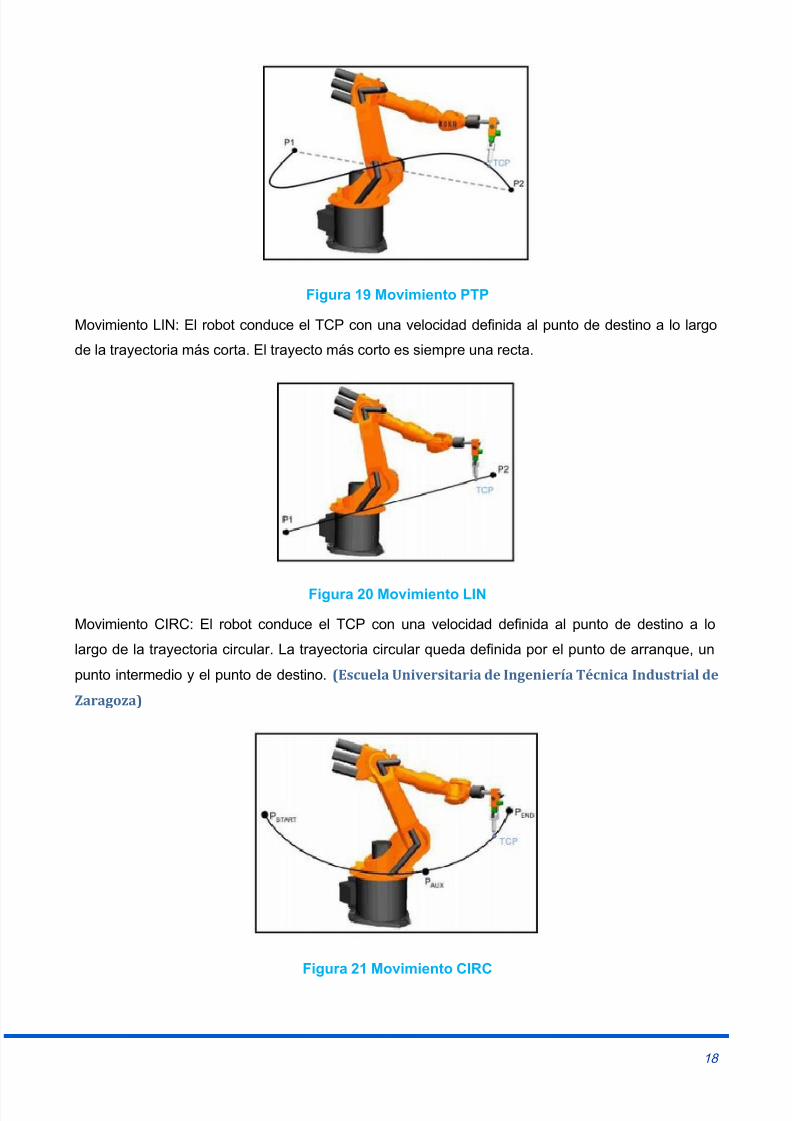
4. Se pueden guardar como máximo 32 sistemas de coordenadas BASE diferentes y utilizarlos
de acuerdo con el paso de programa.
Variable: BASE_DATA [1…32] (GmbH, K.R., 2007)
Figura 17 Utilización de varios sistemas de coordenadas de Base.

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 16/28
16
MÉTODOS DE MEDICIÓN DE LA BASE
Existen dos métodos para medir la Base; siendo el siguiente método, el utilizado para el robot
KUKA KR16 y KR5Arc
MEDICIÓN DE LOS 3 PUNTOS
El método consiste en desplazar el TCP a una nueva base, planificada por el operador del robot, en
función de la aplicación. Inicialmente el TCP debe desplazarse a una nueva Base (origen);
posteriormente desplazar el TCP a un punto del eje +X de la nueva Base y finalmente se desplaza
el TCP a un punto del plano +X+Y de la nueva Base. (KUKA)
PROGRAMACIÓN DEL ROBOT
Este tipo de robots se pueden manejar tanto en modo manual como en modo automático, pero
cuando se hace de la segunda forma debemos programar sus movimientos mediante un tipo de
código, este código debe organizarse con el tipo de estructura que se muestra a continuación:
Figura 18 Estructura programa KRL
1 La línea DEF muestra el nombre del programa. Si el programa es una función, la línea DEF
comienza con "DEFFCT" y contiene otras indicaciones. La línea DEF puede visualizarse o
enmascararse. Seleccionar la secuencia de menú Configuración > Extras > Editor > DEF Linea.
Esta función no está disponible en el grupo de usuarios "Usuario".
2 La línea INI contiene inicializaciones para variables internas y parámetros.
¡La línea INI no debe ser borrada!
4 HOME-Position: La HOME POSITION es una posición válida por encima de los límites del
programa. Por regla general, se la utiliza como primera y última posición en el programa, por su
definición unívoca y no crítica. La HOME position está declarada por defecto en la unidad de control
del robot. Se pueden programar por aprendizaje otras 9 Home Positions.
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 17/28
17
Cuando una HOME Position es modificada, incide en todos los programas en la cual es utilizada.
Caso contrario, se tienen como consecuencia lesiones o daños materiales.
Una Home Position debe cumplir las siguientes condiciones:
Posición de salida favorable para la ejecución del programa.
Posición de parada favorable. Por ejemplo, en la posición de parada el robot no debe ser un
obstáculo.
8 Movimiento LIN: "Programar movimientos LIN"
14 Movimiento PTP: "Programar movimientos PTP"
20 HOME-Position
22 La línea END es la última línea en cada programa. Si el programa es una función, la línea ENDse escribe "ENDFCT".
¡La línea END no debe ser borrada! (Escuela Universitaria de Ingeniería Técnica Industrial de
Zaragoza)
TIPOS DE MOVIMIENTO
El robot dispone de diferentes tipos de movimiento, cada uno de ellos tiene características
diferentes y se usan para aplicaciones distintas, pueden programarse los siguientes tipo demovimiento:
Movimiento Point-to-Point (PTP).
Movimiento lineal (LIN).
Movimiento circular (CIRC).
Movimientos LIN y CIRC también se encuentran agrupados bajo la denominación movimientos CP
("Continuous Path").El punto de arranque de un movimiento es siempre el punto de destino delmovimiento anterior, o cuando el robot no se mueve, es la posición actual del robot.
Movimiento PTP: El robot desplaza el TCP al punto de destino a lo largo de la trayectoria más
rápida. La trayectoria más rápida no es, en regla general, la trayectoria más corta y por ello no es
una recta. Dado que los ejes del robot se mueven de forma rotacional, trayectorias curvas pueden
ser ejecutadas de forma más rápida que las rectas. No puede predecirse la trayectoria exacta.
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 18/28
18
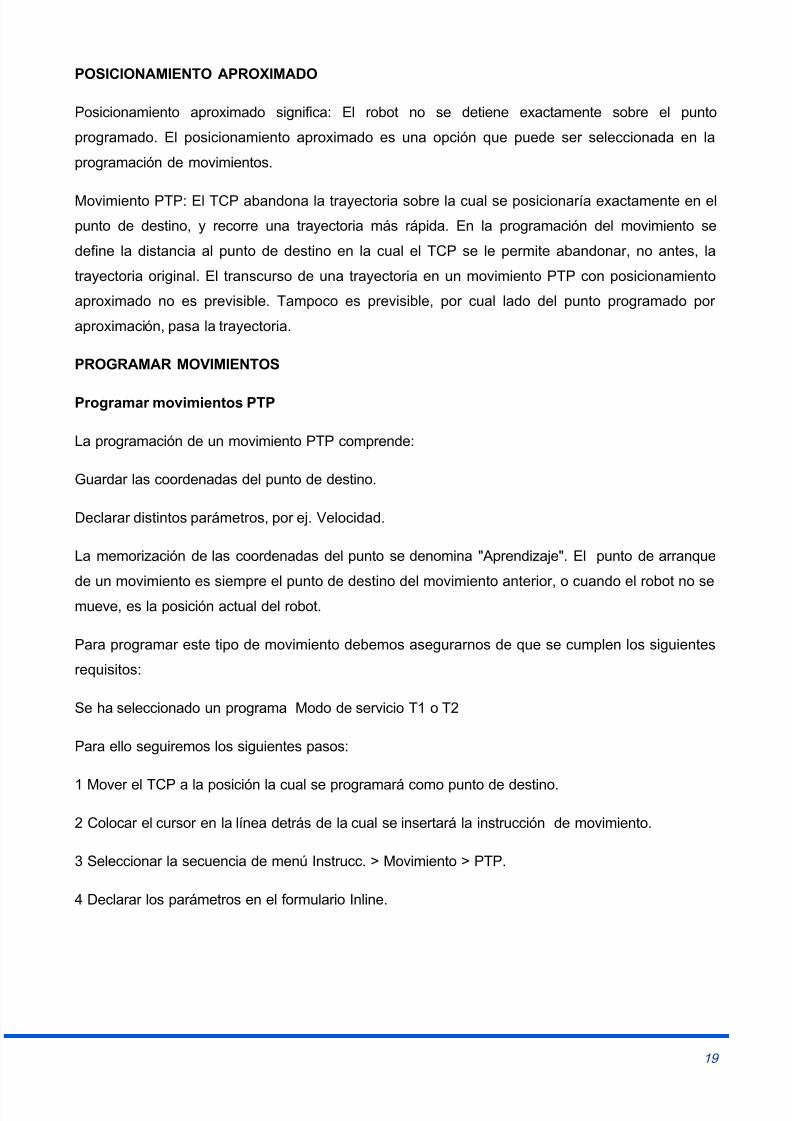
Figura 19 Movimiento PTP
Movimiento LIN: El robot conduce el TCP con una velocidad definida al punto de destino a lo largo
de la trayectoria más corta. El trayecto más corto es siempre una recta.
Figura 20 Movimiento LIN
Movimiento CIRC: El robot conduce el TCP con una velocidad definida al punto de destino a lo
largo de la trayectoria circular. La trayectoria circular queda definida por el punto de arranque, un
punto intermedio y el punto de destino. (Escuela Universitaria de Ingeniería Técnica Industrial de
Zaragoza)
Figura 21 Movimiento CIRC
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 19/28
19
POSICIONAMIENTO APROXIMADO
Posicionamiento aproximado significa: El robot no se detiene exactamente sobre el punto
programado. El posicionamiento aproximado es una opción que puede ser seleccionada en la
programación de movimientos.
Movimiento PTP: El TCP abandona la trayectoria sobre la cual se posicionaría exactamente en el
punto de destino, y recorre una trayectoria más rápida. En la programación del movimiento se
define la distancia al punto de destino en la cual el TCP se le permite abandonar, no antes, la
trayectoria original. El transcurso de una trayectoria en un movimiento PTP con posicionamiento
aproximado no es previsible. Tampoco es previsible, por cual lado del punto programado por
aproximación, pasa la trayectoria.
PROGRAMAR MOVIMIENTOS
Programar movimientos PTP
La programación de un movimiento PTP comprende:
Guardar las coordenadas del punto de destino.
Declarar distintos parámetros, por ej. Velocidad.
La memorización de las coordenadas del punto se denomina "Aprendizaje". El punto de arranque
de un movimiento es siempre el punto de destino del movimiento anterior, o cuando el robot no se
mueve, es la posición actual del robot.
Para programar este tipo de movimiento debemos asegurarnos de que se cumplen los siguientes
requisitos:
Se ha seleccionado un programa Modo de servicio T1 o T2
Para ello seguiremos los siguientes pasos:
1 Mover el TCP a la posición la cual se programará como punto de destino.
2 Colocar el cursor en la línea detrás de la cual se insertará la instrucción de movimiento.
3 Seleccionar la secuencia de menú Instrucc. > Movimiento > PTP.
4 Declarar los parámetros en el formulario Inline.
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 20/28
20
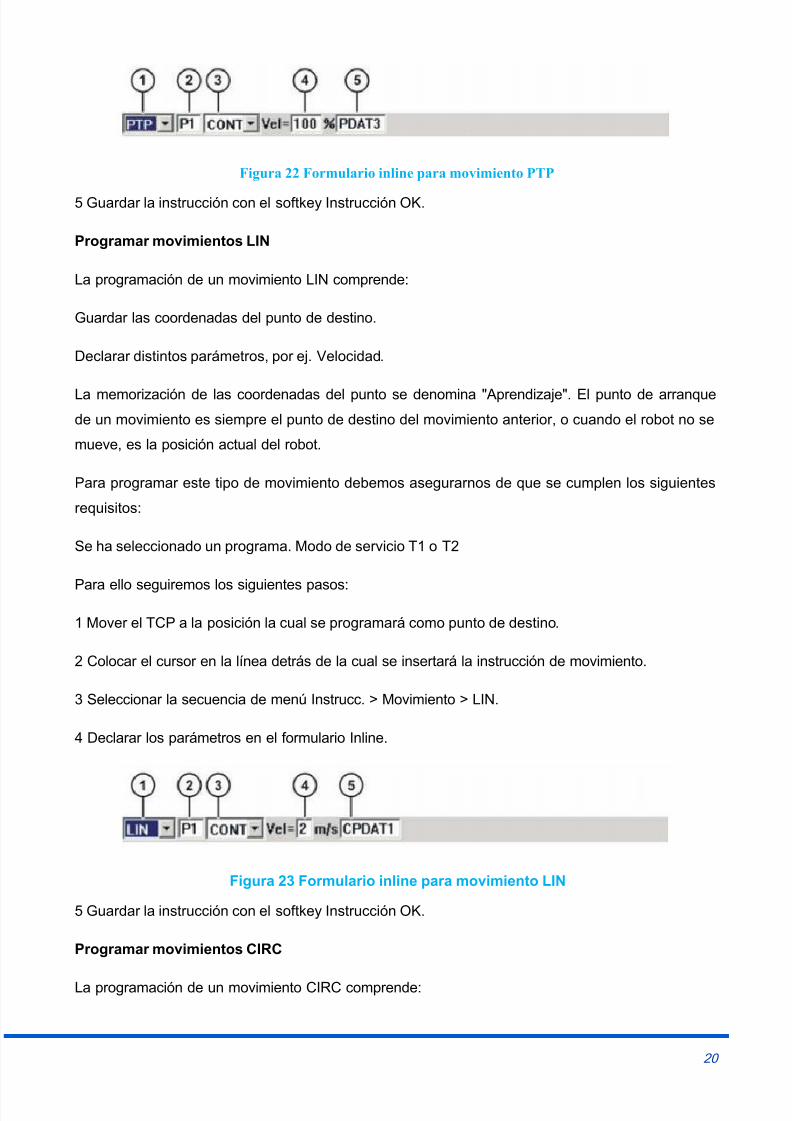
Figura 22 Formulario inline para movimiento PTP
5 Guardar la instrucción con el softkey Instrucción OK.
Programar movimientos LIN
La programación de un movimiento LIN comprende:
Guardar las coordenadas del punto de destino.
Declarar distintos parámetros, por ej. Velocidad.
La memorización de las coordenadas del punto se denomina "Aprendizaje". El punto de arranquede un movimiento es siempre el punto de destino del movimiento anterior, o cuando el robot no se
mueve, es la posición actual del robot.
Para programar este tipo de movimiento debemos asegurarnos de que se cumplen los siguientes
requisitos:
Se ha seleccionado un programa. Modo de servicio T1 o T2
Para ello seguiremos los siguientes pasos:
1 Mover el TCP a la posición la cual se programará como punto de destino.
2 Colocar el cursor en la línea detrás de la cual se insertará la instrucción de movimiento.
3 Seleccionar la secuencia de menú Instrucc. > Movimiento > LIN.
4 Declarar los parámetros en el formulario Inline.
Figura 23 Formulario inline para movimiento LIN
5 Guardar la instrucción con el softkey Instrucción OK.
Programar movimientos CIRC
La programación de un movimiento CIRC comprende:
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 21/28
21
Guardar las coordenadas del punto intermedio.
Guardar las coordenadas del punto de destino.
Declarar distintos parámetros, por ej. Velocidad.
La memorización de las coordenadas del punto se denomina "Aprendizaje". El punto de arranquede un movimiento es siempre el punto de destino del movimiento anterior, o cuando el robot no se
mueve, es la posición actual del robot.
Para programar este tipo de movimiento debemos asegurarnos de que se cumplen los siguientes
requisitos:
Se ha seleccionado un programa. Modo de servicio T1 o T2
Para ello seguiremos los siguiente pasos:
1 Mover el TCP a la posición la cual se programará como punto de destino.
2 Colocar el cursor en la línea detrás de la cual se insertará la instrucción de movimiento.
3 Seleccionar la secuencia de menú Instrucc. > Movimiento > CIRC.
4 Declarar los parámetros en el formulario Inline.
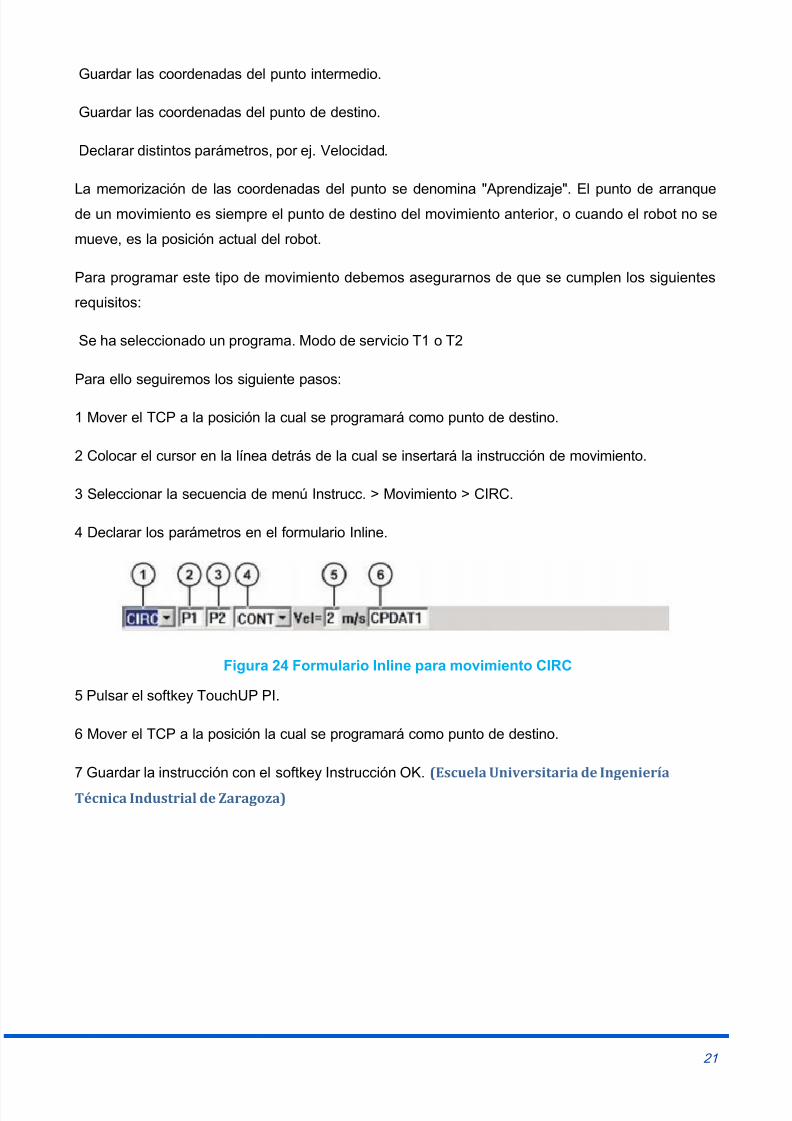
Figura 24 Formulario Inline para movimiento CIRC
5 Pulsar el softkey TouchUP PI.
6 Mover el TCP a la posición la cual se programará como punto de destino.
7 Guardar la instrucción con el softkey Instrucción OK. (Escuela Universitaria de Ingeniería
Técnica Industrial de Zaragoza)

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 22/28
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 23/28
23
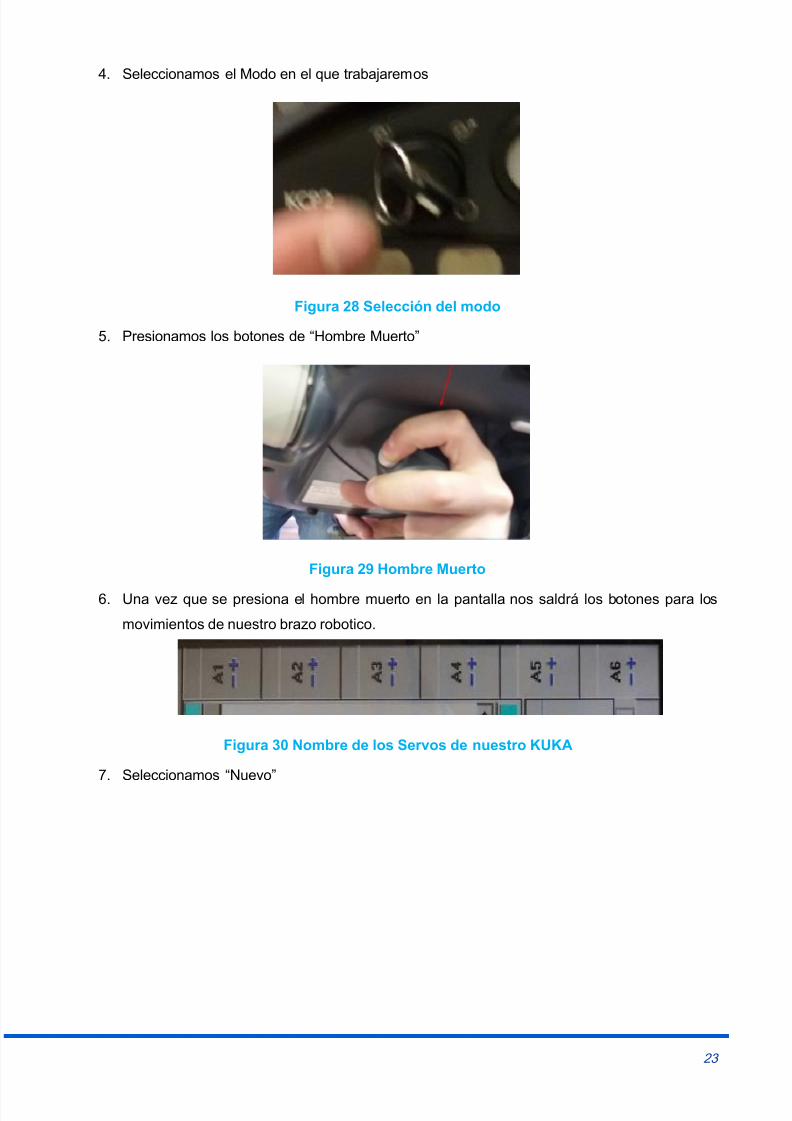
4. Seleccionamos el Modo en el que trabajaremos
Figura 28 Selección del modo
5. Presionamos los botones de “Hombre Muerto”
Figura 29 Hombre Muerto
6. Una vez que se presiona el hombre muerto en la pantalla nos saldrá los botones para los
movimientos de nuestro brazo robotico.
Figura 30 Nombre de los Servos de nuestro KUKA
7. Seleccionamos “Nuevo”

7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 24/28
24
Figura 31 Selección de Nuevo
8. Vamos a la carpeta donde guardaremos el archivo y lo creamos .
Figura 32 Creación del archivo9. Una vez creamos el archivo nos saldrá la pantalla de programación
Figura 33 Programación del KUKA
10. Seleccionamos el Movimiento que vamos a realizar en este caso punto a punto.
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 25/28
25
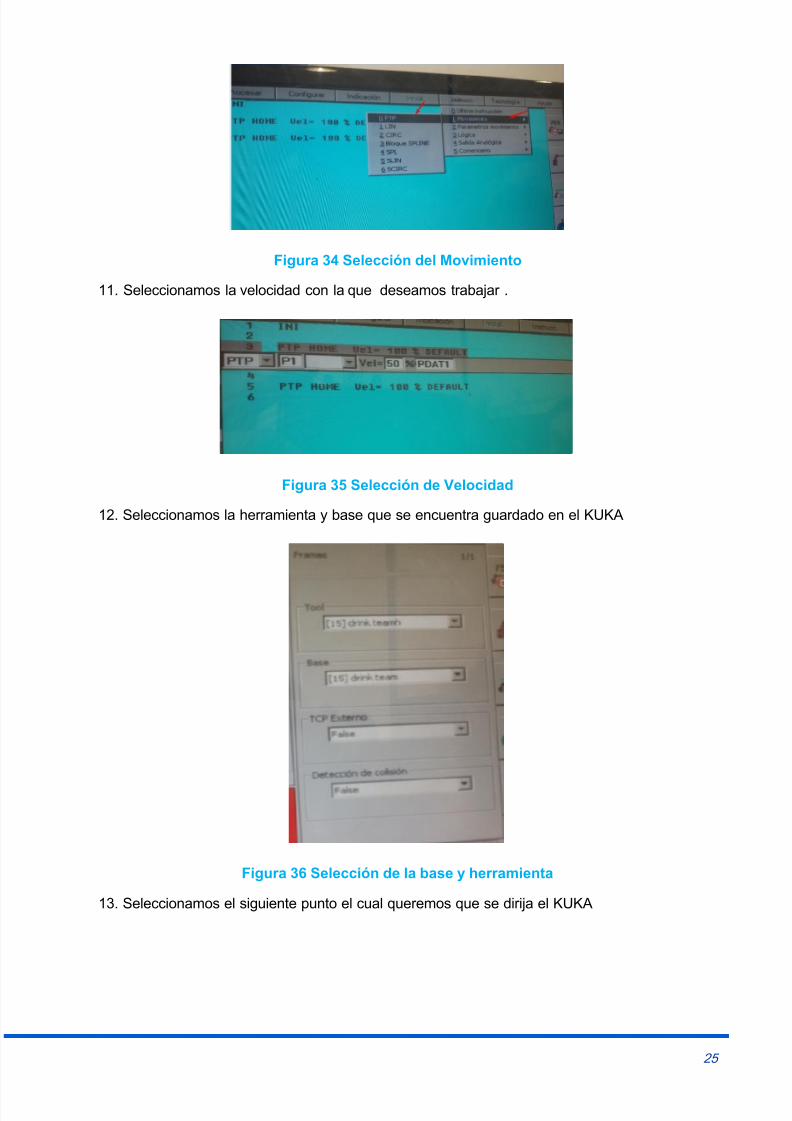
Figura 34 Selección del Movimiento
11. Seleccionamos la velocidad con la que deseamos trabajar .
Figura 35 Selección de Velocidad
12. Seleccionamos la herramienta y base que se encuentra guardado en el KUKA
Figura 36 Selección de la base y herramienta
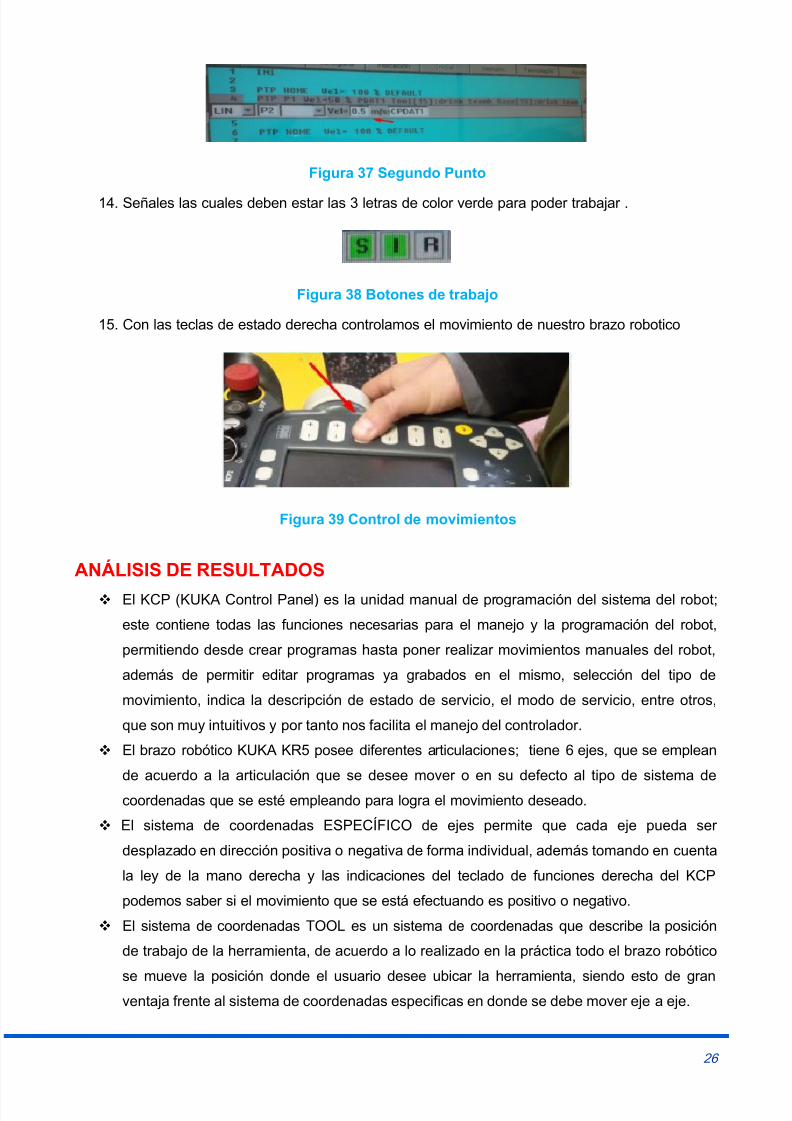
13. Seleccionamos el siguiente punto el cual queremos que se dirija el KUKA
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 26/28
26
Figura 37 Segundo Punto
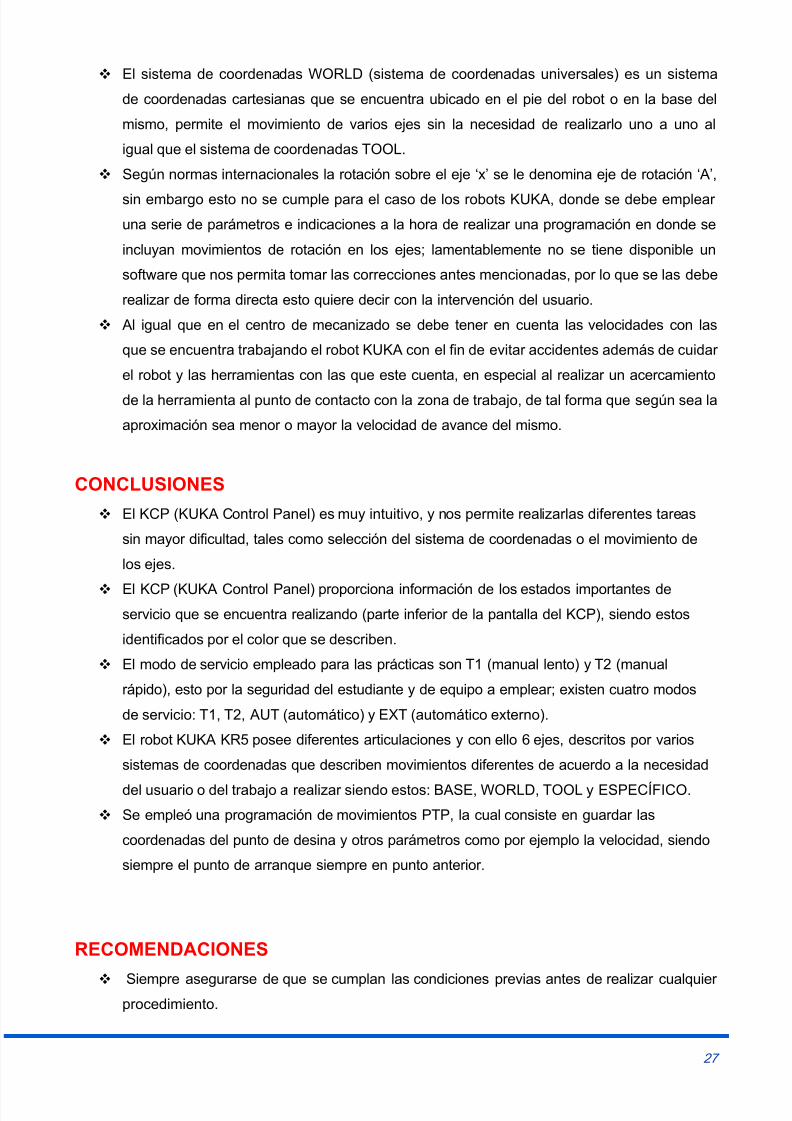
14. Señales las cuales deben estar las 3 letras de color verde para poder trabajar .
Figura 38 Botones de trabajo
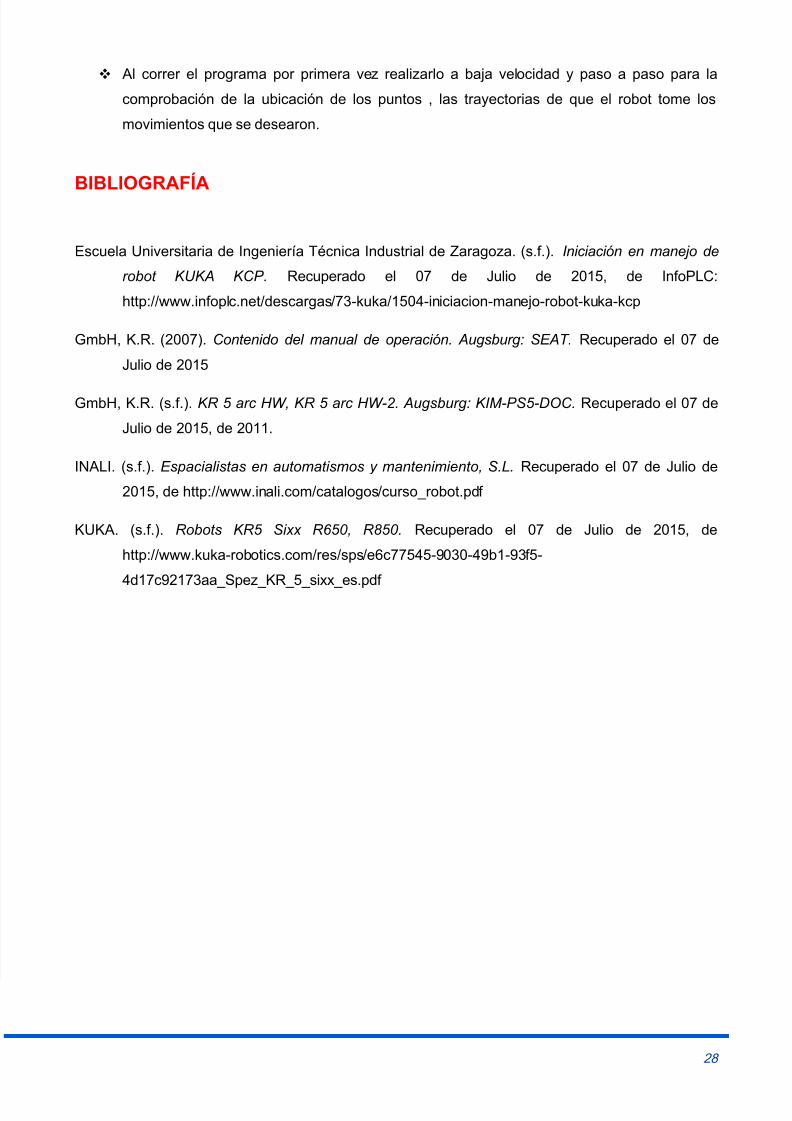
15. Con las teclas de estado derecha controlamos el movimiento de nuestro brazo robotico
Figura 39 Control de movimientos
ANÁLISIS DE RESULTADOS
El KCP (KUKA Control Panel) es la unidad manual de programación del sistema del robot;
este contiene todas las funciones necesarias para el manejo y la programación del robot,
permitiendo desde crear programas hasta poner realizar movimientos manuales del robot,
además de permitir editar programas ya grabados en el mismo, selección del tipo de
movimiento, indica la descripción de estado de servicio, el modo de servicio, entre otros,
que son muy intuitivos y por tanto nos facilita el manejo del controlador.
El brazo robótico KUKA KR5 posee diferentes articulaciones; tiene 6 ejes, que se emplean
de acuerdo a la articulación que se desee mover o en su defecto al tipo de sistema de
coordenadas que se esté empleando para logra el movimiento deseado.
El sistema de coordenadas ESPECÍFICO de ejes permite que cada eje pueda ser
desplazado en dirección positiva o negativa de forma individual, además tomando en cuenta
la ley de la mano derecha y las indicaciones del teclado de funciones derecha del KCP
podemos saber si el movimiento que se está efectuando es positivo o negativo.
El sistema de coordenadas TOOL es un sistema de coordenadas que describe la posición
de trabajo de la herramienta, de acuerdo a lo realizado en la práctica todo el brazo robótico
se mueve la posición donde el usuario desee ubicar la herramienta, siendo esto de granventaja frente al sistema de coordenadas especificas en donde se debe mover eje a eje.
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 27/28
27
El sistema de coordenadas WORLD (sistema de coordenadas universales) es un sistema
de coordenadas cartesianas que se encuentra ubicado en el pie del robot o en la base del
mismo, permite el movimiento de varios ejes sin la necesidad de realizarlo uno a uno al
igual que el sistema de coordenadas TOOL.
Según normas internacionales la rotación sobre el eje ‘x’ se le denomina eje de rotación ‘A’,
sin embargo esto no se cumple para el caso de los robots KUKA, donde se debe emplearuna serie de parámetros e indicaciones a la hora de realizar una programación en donde se
incluyan movimientos de rotación en los ejes; lamentablemente no se tiene disponible un
software que nos permita tomar las correcciones antes mencionadas, por lo que se las debe
realizar de forma directa esto quiere decir con la intervención del usuario.
Al igual que en el centro de mecanizado se debe tener en cuenta las velocidades con las
que se encuentra trabajando el robot KUKA con el fin de evitar accidentes además de cuidar
el robot y las herramientas con las que este cuenta, en especial al realizar un acercamiento
de la herramienta al punto de contacto con la zona de trabajo, de tal forma que según sea la
aproximación sea menor o mayor la velocidad de avance del mismo.
CONCLUSIONES
El KCP (KUKA Control Panel) es muy intuitivo, y nos permite realizarlas diferentes tareas
sin mayor dificultad, tales como selección del sistema de coordenadas o el movimiento de
los ejes.
El KCP (KUKA Control Panel) proporciona información de los estados importantes deservicio que se encuentra realizando (parte inferior de la pantalla del KCP), siendo estos
identificados por el color que se describen.
El modo de servicio empleado para las prácticas son T1 (manual lento) y T2 (manual
rápido), esto por la seguridad del estudiante y de equipo a emplear; existen cuatro modos
de servicio: T1, T2, AUT (automático) y EXT (automático externo).
El robot KUKA KR5 posee diferentes articulaciones y con ello 6 ejes, descritos por varios
sistemas de coordenadas que describen movimientos diferentes de acuerdo a la necesidad
del usuario o del trabajo a realizar siendo estos: BASE, WORLD, TOOL y ESPECÍFICO.
Se empleó una programación de movimientos PTP, la cual consiste en guardar las
coordenadas del punto de desina y otros parámetros como por ejemplo la velocidad, siendo
siempre el punto de arranque siempre en punto anterior.
RECOMENDACIONES
Siempre asegurarse de que se cumplan las condiciones previas antes de realizar cualquierprocedimiento.
7/24/2019 INFORME_2_III_UNIDAD.pdf
http://slidepdf.com/reader/full/informe2iiiunidadpdf 28/28
Al correr el programa por primera vez realizarlo a baja velocidad y paso a paso para la
comprobación de la ubicación de los puntos , las trayectorias de que el robot tome los
movimientos que se desearon.
BIBLIOGRAFÍA
Escuela Universitaria de Ingeniería Técnica Industrial de Zaragoza. (s.f.). Iniciación en manejo de
robot KUKA KCP. Recuperado el 07 de Julio de 2015, de InfoPLC:
http://www.infoplc.net/descargas/73-kuka/1504-iniciacion-manejo-robot-kuka-kcp
GmbH, K.R. (2007). Contenido del manual de operación. Augsburg: SEAT. Recuperado el 07 de
Julio de 2015
GmbH, K.R. (s.f.). KR 5 arc HW, KR 5 arc HW-2. Augsburg: KIM-PS5-DOC. Recuperado el 07 de
Julio de 2015, de 2011.
INALI. (s.f.). Espacialistas en automatismos y mantenimiento, S.L. Recuperado el 07 de Julio de
2015, de http://www.inali.com/catalogos/curso_robot.pdf
KUKA. (s.f.). Robots KR5 Sixx R650, R850. Recuperado el 07 de Julio de 2015, de
http://www.kuka-robotics.com/res/sps/e6c77545-9030-49b1-93f5-
4d17c92173aa_Spez_KR_5_sixx_es.pdf