





Idiomas
Páginas
Jurídico


CONVERTIDORES DE FRECUENCIA INTELIGENTES
Manual de Uso
Series HD09 y HD09S
MONOFÁSICO 220 – 240V, 0.25 – 2.2 KW
TRIFÁSICO 380 – 460V, 0.4 – 5.5KW
* Traducido por EMESA S.L.* Propiedad intelectual de HPMONT

Marzo 2018 Versión 1V.0
CONTENIDO:
Capitulo 1: Información de seguridad.....................................................................................4
Capitulo 2: Información sobre el producto..............................................................................52.1: Placa......................................................................................................................52.2: Valores indicadas.................................................................................................6
Capitulo 3: Instalación mecánica..............................................................................................73.1: Dimensión & Peso................................................................................................73.2: Requisitos para la instalación en situ................................................................83.3: Instalación del teclado numérico exterior (Keypad)........................................9
Capitulo 4: Instalación eléctrica.............................................................................................114.1: Requisitos eléctricos..........................................................................................124.2: Conexión & Terminales de potencia................................................................154.3: Conexión & Terminales de Control.................................................................164.4: Teclado externo o computadora superior........................................................19
Capitulo 5: Datos Técnicos......................................................................................................205.1: Selección de accesorios periféricos...................................................................205.2: Resistencia de frenado.......................................................................................215.3: Datos Técnicos...................................................................................................22
Capitulo 6: Operación.............................................................................................................236.1: Teclado numérico...............................................................................................236.2: Desactivación (apagar) & parámetros de estado operativo...........................256.3: Operación de Control del teclado numérico...................................................256.4: Terminal de control de funcionamiento...........................................................26
6.5: Operación de control de comunicaciones........................................................26
Capitulo 7: Introducción detallada de funcionamiento........................................................277.1: F00: Parámetro básico......................................................................................277.2: F01: Parámetro de la función de protección...................................................297.3: F02: Parámetro de control de Inicio & Parada (Stop)...................................307.4: F03: Parámetro de Acc. & Dec.........................................................................317.5: F04: Parámetro de control del proceso PID....................................................327.6: F05: Parámetros de la curva externa dada.....................................................347.7: F06: Función de velocidad multietapa............................................................357.8: F08: Parámetro del Motor................................................................................357.9: F09: V/F Parámetro de Control.......................................................................367.10: F15: Entrada Digital / Parámetro de los terminales de salida....................377.11: F16: Entrada Analógica / Parámetro del terminal de salida.......................437.12: F17: Parámetro de comunicación SCI...........................................................457.13: F18: Parámetro de la pantalla de Control....................................................477.14: F19: Parámetros de mejora y ampliación.....................................................487.15: F20: Parámetro de protección de fallo..........................................................517.16: F23: Parámetro de Control de PWM............................................................53
-2-

Capitulo 8: Diagnostico de averías / resolución de problemas & Mantenimiento.............548.1: Diagnostico de averías.......................................................................................548.2: Mantenimiento...................................................................................................57
Capitulo 9: MODBUS Protocolo de Comunicación..............................................................599.1: Resumen.............................................................................................................599.2: Calibración de relación del valor transferido correspondiente.....................609.3: Funciones de Protocolo.....................................................................................609.4: Relación de asignación de direcciones.............................................................639.5; Instrucciones especiales....................................................................................659.6: Ejemplos de aplicaciones..................................................................................66
Capitulo 10: Parámetros..........................................................................................................69
-3-

Capitulo 1: Información de Seguridad
Definiciones de seguridad
Presta atención al contenido de las siguientes indicaciones en este manual o en el producto.
¡Peligro!
Presta atención a la señal de “Peligro”, para evitar accidentes
¡Atención!
“Aviso” o “Atención”: presta atención para evitar causar daños al producto
Nota
“Nota” presta atención operar correctamente con el producto
Personal profesional
Solo los ingenieros eléctricos pueden llevar a cabo la instalación eléctrica.
Solo los profesionales quien han recibido una formación especial son autorizados a realizar tareas de mantenimiento.
-4-

Capitulo 2: Información sobre el Producto
2.1: Placa de identificación
Etiqueta de la placa
La placa esta situada en el lado derecho del convertidor y muestra el dibujo y la información siguiente:
Etiqueta de la Potencia
La etiqueta de la potencia esta situada bajo el teclado para reconocer fácil y rápidamente el productoEn la etiqueta esta indicada la potencia del motor y el voltaje, tal como en la siguiente figura:
-5-

2.2 Valores indicadas
Monofásico: 200 – 240V, 50/60Hz
Tamaño ModeloPotencia del motor (kW)
Corriente de entrada indicada (A)
Volumen indicado (kVA)
Corriente de salida indicada (A)
Tamaño A HD09-2S0P2G 0.25 4.3 0.6 1.7
Tamaño A HD09-2S0P4G 0.4 5.8 1.0 2.5
Tamaño A HD09-2S0P7G 0.75 10.5 1.5 4.0
Tamaño A HD09-2S1P5G 1.5 18.5 2.8 7.5
Tamaño A HD09-2S2P2G 2.2 24.1 3.8 10.0
Trifásico: 380 – 460V, 50/60Hz
Tamaño ModeloPotencia del motor (kW)
Corriente de entrada indicada (A)
Volumen indicado (kVA)
Corriente de salida indicada (A)
Tamaño A HD09-4T0P4G 0.4 1.8 1.0 1.4
Tamaño A HD09-4T0P7G 0.75 3.4 1.5 2.3
Tamaño A HD09-4T1P5G 1.5 5.2 2.5 3.8
Tamaño A HD09-4T2P2G 2.2 7.3 3.4 5.1
Tamaño B HD09-4T4P0G 4.0 11.9 5.9 9.0
Tamaño B HD09-4T5P5G 5.5 15.0 8.5 13.0
-6-

Capitulo 3: Instalación mecánica
¡Peligro!
Si se encuentra una pieza rota o ausente tras abrir la caja, contactar con el distribuidor para solucionarlo.
Durante el transporte asegurarse de usar herramientas adecuadas para el peso del convertidor
Evitar rayar o dañar el producto Cuidado: la caída puede provocar daños. Evitar la caída de virutas del taladro dentro del convertidor, con el taladro
durante la instalación. Para un convertidor almacenado durante más de 2 años, usar un regulador de
tensión para encenderlo de forma lenta.
3.1 Dimensiones y peso
Tamaño A:
Dimensiones: 100 x 150 x 125 mmDimensiones de montaje: 82 x 140 mmHueco de montaje: 5 mmPeso bruto: 1.5 kg
Tamaño B:
Dimensiones: 116 x 185 x 145 mmDimensiones de montaje: 98 x 174 mmHueco de montaje: 6.5 mmPeso bruto: 2.7 kg
-7-

3.2 Requisitos para el lugar de instalación
Asegurarse de que el lugar de instalación cumple con los siguientes requisitos:
Que no esté al alcance directo de la luz solar, agua o humedad;
Que no esté en lugares con riesgo de líquidos, gases corrosivos, explosivos o incendios;
Que no esté en ambientes polvorientos de cualquier tipo;
Instalar en un soporte sólido y resistente a fuego;
Instalar en un lugar sin condensación dondela humedad relativa es menos del 95%;
Instalar en un soporte donde la vibración sea menor a 3.5m/s2 a 2 – 9Hz, 10m/s2 a 9 –200Hz (IEC60721-3-3);
Este convertidor cumple con el estándar IP20 y el nivel de grado de contaminación 2 (Contaminación polvorienta seca, no conductora);
Asegurarse de tener espacio suficiente de ventilación para mantener la temperatura ambiente entre -10 a 40ºC, tal como demostrado en la imagen a la izquierda;
Se requiere la reducción de carga si la temperatura excede los 40ºC. El valor de reducción de carga será del 2% por cada grado. La temperatura máxima permitida es de 50ºC.
-8-

3.3 Instalación del teclado externo
HD09 permite la instalación de un teclado externo opcional en la puerta de una caja de control. Los teclados opcionales son HD-LED-P y HD-LED-S.
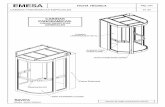
3.3.1 Instalación de HD-LED-P
HD-LED-P requiere la base de montaje HD-KMB para la instalación. Primero se instala la base de montaje en la puerta de la caja de control y luego se instala HD-LED-P en la base.
Las dimensiones de la base de montaje y el hueco de montaje de HD-KMB se muestran en la siguiente imagen (unidad: mm)
3.3.2 Instalación de HD-LED-P-S
Hay dos métodos de instalación para HD-LED-P-S: instalación con tornillos o en una base de montaje.
Contenido del paquete: base de montaje, teclado, 2 tornillos M3x5, cable de extensión de 1 metro.
-9-

Para instalar con tornillos
Instalar HD-LED-P-S en la puerta de la caja de control con tornillos.
Las dimensiones de montaje y hueco de montaje se muestran en la siguiente imagen.
Para instalar con la base de montaje
Primero instalar la base de montaje HD-KMB-S en la puerta de una caja de control y luego instala HD-LED-S en la base.
Las dimensiones de la base y hueco de montaje HD-KMB-S se muestran en la siguiente imagen (unidad: mm).
-10-

Capítulo 4 Instalación eléctrica
¡Peligro!
Solo un electricista profesional puede instalar el cableado El cableado se debe instalar una vez apagado el interruptor de la
fuente de alimentación. Comprobar el funcionamiento correcto al conectar el terminal de
parada de emergencia a la fuente de alimentación externa. Las piezas de metal descubierto de la terminal se deben cubrir con
cinta aislante ó usar terminales aislados. No tocar los cables del terminal cuando esta conectado.
Asegurarse de que la fuente de alimentación esta completamente apagada
Solo se puede empezar la instalación del cableado cuando el interruptor de la fuente de alimentación está completamente apagado.
Pasos:
Primero, desconectar la fuente de alimentación del convertidor
Segundo, esperar hasta ver apagarse el indicador de la fuente de alimentación interna (su posición se muestra en la siguiente imagen) o esperar al menos 5 minutos.
-11-

4.1 Requisitos eléctricos
4.1.1 Puesta a tierra
¡Peligro!
Antes de conectar la toma de tierra, el terminal de tierra del convertidor debe estar apagado, desconectado
Para la corriente residual, el terminal PE debe de estar puesto a tierra en el punto mas cercano a la zona mas amplia posible para que la resistencia sea menor a 10Ω.
No se puede compartir el cable de puesta a tierra (A) con otros aparatos eléctricos. Es mejor tener una varilla de tierra dedicada (B) pero también se puede compartir varillas (C).
Si se usan varios convertidores al mismo tiempo, se puede usar tomas a tierra dedicadas o compartidas.
4.1.2 Requisitos del cableado
Para evitar el acoplamiento, los cables de alimentación del motor y de control se tienen que instalar por separado y a una distancia suficiente, sobre todo cuando se instalan en paralelo durante mucho recorrido.
Si el cable de señal tiene que cruzar el cable de alimentación o el cable del motor, los debe cruzar con un ángulo de 90º, mostrado en la imagen abajo.
Los cables de alimentación, motor y control se deben distribuir en conductos separados.
-12-

4.1.3 Cable de alimentación
¡Atención!
No conectar el cable de alimentación de entrada al terminal de salida U/V/W.
No conectar el condensador de desplazamiento de fase al circuito de salida.
Asegurarse de que la tensión de CA de entrada es igual a la tensión indicada del convertidor
Para seleccionar el cable de alimentación, hacer referencia a Apartado 5.1 Selección de accesorios periféricos, página 20.
4.1.4 Cable de motor
Para la selección de cables de motor, ver Apartado 5.1 Selección de accesorios periféricos, página 20.
Al aumentar la longitud del cable de motor, se aumenta la frecuencia de transmisión y la corriente armónica residual en el cable. La corriente residual puede afectar negativamente al convertidor de frecuencia y aparatos cercanos.
Cuando la longitud del cable de motor supera los 100 metros, se recomienda instalar una reactancia de salida CA y hacer referencia a la siguiente tabla para ajustar la frecuencia de transmisión (F23.00).
Longitud del cable de motor < 30 m 30 – 50 m 50 – 100 m > 100 m
Ajuste de la frecuencia de transmisión Menor a 15 kHz Menor a 10 kHz Menor a 5 kHz Menor a 2 kHz
Cuando el cable de motor es demasiado largo o la sección demasiado grande, se reduce la carga un 5% por cada capa adicional en la sección recomendada del cable.
Al ser mayor el área transversal, la capacitancia a la tierra y la corriente residual son mayores.
4.1.5 Cable de control
Para reducir la interferencia y la atenuación de la señal de control, el cable de control se limita a 50 metros.
El cable de control debe ser un cable blindado, y el cable se señal analógico debe estar trenzado y blindado.
Los cables blindados deben ser cables de frecuencia alta y impedancia baja, como por ejemplo los cables de cobre trenzado, o de alambre de aluminio.
-13-

4.1.6 Interruptor de protección diferencial
HD09 tiene un filtro de interferencia electromagnética integrada y puede proteger contra interferencias exteriores con una corriente residual a tierra de 10mA CA
En el caso de situaciones de poca corriente residual, se puede desconectar el filtro de la toma a tierra y la corriente residual de la toma a tierra será menos de 1mA CA. Ver como desconectar el filtro EMI en la siguiente imagen.
El interruptor de protección diferencial (ELCB/RCD) está instalado en el lado de entrada del convertidor. Desconectar el filtro EMI para prevenir la activación no deseada del ELCB/RCD.
La activación del ELCB/RCD se relaciona con la forma de corriente que detecta y hay tres tipos:
Tipo CA: Detecta anomalías en la CA que no son compatibles con los convertidores de frecuencia. Tipo A: Detecta anomalías en la CA y CC pulsante. Solo se aplica a los convertidores de
alimentación monofásica. Tipo B: Detecta anomalías en la CA, anomalías en la CC y CC Pulsante. Requiere alimentación
trifásica.
-14-

4.2 Terminales de potencia y conexión
Descripción de los terminales de potencia
Terminal Descripción
L1, L2, L3,/N Terminales de entrada para CA trifásica
L1, L3/N Terminales de entrada para CA monofásica
U, V, W Terminales de salida, conecta con motor CA
(+), BR Terminal de conexión a la resistencia de frenado
PE Terminal de tierra, conecta a tierra
Terminal Descripción
L1, L2, L3,/N Terminales de entrada para CA trifásica
L1, L3/N Terminales de entrada para CA monofásica
U, V, W Terminales de salida, conecta con motor CA
(+), BR Terminal de conexión a la resistencia de frenado
(+), (-) Terminales de entrada de CC
PE Terminal de tierra, conecta a tierra
-15-

Conexión de los terminales de potencia
El cableado de los terminales de potencia se muestra en la siguiente imagen.
Para la selección de contactores, MCBB, cables de alimentación, cables de motor, cables de tierra y resistencias de frenado, hacer referencia al apartado 5.1.1 Especificaciones de cableado de entrada ysalida, página 20.
4.3 Terminales de control y conexión
Descripción de los terminales de control.
Terminal Descripción
+10 Alimentación externa Salida de corriente máxima 100mA
AI Entrada analógica El interruptor DIP indica la entrada detensión o corriente- Tensión 0 – 10V, impedancia 32kΩ(ajuste de fábrica)- Corriente 0 – 20mA, impedancia 500Ω
Entrada digital (función DI)
Cuando se utiliza AI como DI, se pueden recibir señales de interruptor de 6V- Función F15.44 es igual con DI1 – I3 (F15.00 – F15.02)
AO Salida analógica Tensión 0 - 10V
GND Tierra Analógico y digital, 0V
-16-

Terminal Descripción
DI1, DI2, DI3 Entrada digital Eficaz con corte de circuito de tierra
DI4 Entrada digital Eficaz con corte de circuito de tierraoEntrada de alta frecuencia (F15.03 ajustado como función No. 53- Frecuencia máxima 50.0kHz (Ajuste F16.17)
DO Salida digital Salida de colector abierto- Tensión externo 10 – 30V CC, corriente máxima 50mAoEntrada de alta frecuencia (F15.19 ajustado como función No. 38)- Frecuencia máxima 50.0kHz (Ajuste F16.26)
R1A, R1B, R1C Salida de relé - Capacidad de contacto: 250V CA/3A o 30V CC/1A- R1B, R1C: normalmente cerrado; R1A, R1C: normalmente abierto
Nota:
Limitar la corriente a menos de 3A si el terminal de relé se conecta a una señal de 220V CA
Conexión de los terminales de control
La siguiente imagen muestra la conexión de los cables al terminal de control (ajuste de fábrica).
-17-

Conexión de entrada analógica
Conexión de entrada digital
Conexión de salida digital
-18-

4.4 Teclado o ordenador externo
Se puede conectar el terminal RJ45 al teclado opcional o un ordenador externo, mostrado en la siguiente imagen.
RJ45
Clavija Definición
1, 3 +5V
2 485+
4, 5, 6 GND
7 485-
8 Sin usar
Teclado Se puede conectar el teclado opcional para tomar el control Ver apartado 6.1 Teclado, Página 23
Ordenador externo Se puede conectar un ordenador para tomar el control Ordenador: incluye PLC, pantalla táctil, PC, tablet etc.
Cable de conexión Cable de conexión de 1m [HD-CAB-1M] Cable de conexión de 2m [HD-CAB-2M] Cable de conexión de 3m [HD-CAB-3M] Cable de conexión de 6m [HD-CAB-6M]
-19-

Capítulo 5: Información técnica
5.1 Selección de accesorios periféricos
5.1.1 Especificaciones para el cableado de entrada y salida
La alimentación CA a la transmisión se debe instalar con protección suficiente contra sobrecargas y cortocircuitos con un MCCB (disyuntor de caja moldeada) o dispositivo equivalente.
Las especificaciones recomendadas de los MCCB, contactores y cables se muestran en la siguiente tabla.
El tamaño del cable a la tierra no puede ser menor al requerido en el 4.3.5.4 del IEC61800-5-1.
Tamaño ModeloMCCB (A)
Contactor (A)
Cable de alimentación (mm2)
Cable de motor (mm2)
Cable de tierra (mm2)
Tamaño A HD09-2S0P2G 16 10 0.5 0.2 2.5
Tamaño A HD09-2S0P4G 16 10 0.75 0.5 2.5
Tamaño A HD09-2S0P7G 16 10 2.5 0.5 2.5
Tamaño A HD09-2S1P5G 20 16 6.0 1.5 6.0
Tamaño A HD09-2S2P2G 32 20 6.0 2.5 6.0
Tamaño A HD09-4T0P4G 10 10 0.5 0.2 2.5
Tamaño A HD09-4T0P7G 10 10 0.5 0.5 2.5
Tamaño A HD09-4T1P5G 16 16 1.0 0.5 2.5
Tamaño A HD09-4T2P2G 16 16 1.5 0.75 2.5
Tamaño B HD09-4T4P0G 25 25 2.5 2.5 2.5
Tamaño B HD09-4T5P5G 32 32 4.0 4.0 4.0
Nota:
1. Elegir una resistencia de frenado basado en la tabla anterior.Una resistencia grande puede proteger el sistema de fallos, pero una resistencia demasiado grande puede causar una disminución de capacidad llevando a la sobretensión..
2. La resistencia de frenado tiene que estar montada dentro de una carcasa de metal resistenteal fuego mientras esté en funcionamiento debido a la alta temperatura que puede alcanzar.
-20-

5.1.2 Los terminales de cable
Se pueden elegir los terminales de cable de acuerdo con las especificaciones del cableado, el tamaño de rosca y el diámetro máximo de su exterior.
Tamaño Tamaño A Tamaño B
Tamaño de rosca M3 M3.5
El par de apriete (N, M) 0.6 – 0.8 0.8 – 1.2
Diámetro máximo exterior (mm)
6.1 7
5.2 Resistencia de frenado
Modelo Valor de resistencia (Ω) Potencia de resistencia (W)
HD09-4T0P4G 300 - 400 80
HD09-4T0P7G 250 - 350 100
HD09-4TP5G 200 - 300 200
HD09-4T2P2G 150 - 250 250
HD09-4T4P0G 100 - 150 300
HD09-4T5P5G 80 - 100 500
Nota:
La resistencia de frenado solo se aplica al modelo trifásico.
-21-

5.3 Especificaciones técnicas
Eléctrico
Tensión de entrada
HD09-2S█P█G: 200 – 240V monofásico
HD09-4T█P█G: 380 – 460V trifásico
Variación a ± 10%, rango de desequilibrio < 3%
Frecuencia de entrada 50/60Hz ± 5%
Tensión de salida 0 – Tensión de entrada
Frecuencia de salida 0 - 1000Hz
Especificación
Modo de control V/f
Corriente máximaCorriente de salida indicada 150% durante 2 minutos; 180% durante 10 segundos
Resolución de velocidad Modo digital: 0.1Hz
Frecuencia de onda Modo analógico: 0.1% x frecuencia máxima
Ambiente
Temperatura de servicio-10 - +40ºC, sin reducción de carga40 - 50ºC, el valor de reducción de carga será del 2% cada 1ºCsubida
Temperatura de almacenamiento -40 - +70ºC
Entorno de usoEn el interior, fuera del alcance de la luz solar, sin polvo, gases corrosivos o inflamables, vapores de aceite o agua, goteras, sal, etc.
AltitudA menos de 1000 m, sin reducción de carga. A más se requiere la reducción de carga
Humedad Humedad relativa menos de 95%, sin condensación
Resistencia a vibraciones Hasta 3.5m/s2 a 2 – 9Hz, 10m/s2 (IEC60721-3-3) a 9 - 200Hz
Nivel de protección IP20
Grado de contaminación Nivel 2 ( Contaminación polvorienta seca, no conductora)
Accesorios
Teclado
HD-LED-P: Teclado con potenciómetro, emparejado con la base de montaje HD-KMBHD-LED-P-S: Teclado pequeño, emparejado con la base de montaje HD-KMB-S
Cable de conexiónCables de conexión de 1m / 2m / 3m / 6m [HD-CAB-1M / 2M /3M / 6M]
-22-

Capítulo 6: Operación
6.1 Teclado
En HD09 se puede instalar un teclado con pantalla LCD (estándar), o un teclado con pantalla LED (opcional).
-23-

No. Descripción
1 El teclado estándar tiene una pantalla LCD mientras que el teclado opcional tiene una pantalla LED
Tres estados: Luz encendida, intermitente y apagada No quitar el teclado estándar
a. Indicador de estado: indica el estado actual. FWD (Marcha adelante): El motor está funcionando marcha adelante (LCD estándar) / luz
encendida (LED opcional) REV (Marcha atrás): El motor está funcionando marcha atrás (LCD estándar) / luz encendida
(LED opcional) ALM (Alerta): Fallo en el motor (LCD estándar) / luz encendida (LED opcional) LO/RE (Local/remoto): El convertidor está en modo de control terminal o comunicación (LCD
estándar) / luz encendida (LED opcional) LOCK (Protegido por contraseña): El convertidor está protegido por una contraseña de usuario
(LCD estándar) / luz encendida (LED opcional)
b. Pantalla: Normal: Indica parámetros. Fallos: Muestra un código de error cuando hay un fallo en el convertidor.
Si un valor parpadea significa que el valor se puede ajustar
c. Indicador de unidad: Indica la unidad del valor actual. Incluye: Hz (frecuencia), A (corriente), V (tensión), RPM, (velocidad de rotación, %
(porcentaje)
2 Botón de programa/salida: Botón para programar o hacer entradas
3 Botón de arranque breve: Con el teclado, arrancar el convertidor brevemente
4 Botón de arranque: Con el teclado, arrancar el convertidor
5 Botón de parada/restablecido: Con el teclado, parar el motor y resolver fallos
6 Botón de aumento: Al seleccionar el estado de un parámetro, permite aumentar el valor de un parámetro; al ajustar el parámetro permite aumentar el valor del ajuste.
7 Botón de reducción: Al seleccionar el estado de un parámetro, permite reducir el valor de un parámetro; al ajustar el parámetro permite reducir el valor del ajuste.
8 Botón de cambio SHE: Al seleccionar ajustes de los parámetros, cambiar un número.
9 Botón de entrada/confirmación: Entrar en el menú de opciones; al ajustar parámetros, confirmar y guardar la información.
10 Potenciómetro: Al establecer los parámetros, girar a la izquierda para reducir y a la derecha para aumentar
-24-

6.2 Apagado y parámetros de estado de funcionamiento
Cuando el convertidor está en el estado de apagado/ funcionamiento., el botón sirve para cambiar entre la pantalla de los parámetros apagado/funcionamiento.
Parámetro de apagado: F18.08 Indicar frecuencia, tensión del bus de CC, tensión de entrada AI, tensión de entrada del potenciómetro, estado del terminal de entrada y estado del terminal de salida.
Parámetro de estado de funcionamiento: F18.02 Frecuencia dada (después de Aceleración y Deceleración), ajuste de frecuencia, frecuencia de salida, tensión de salida, corriente de salida y tensión del bus de CC
6.3 Funcionamiento del teclado de control
Durante el funcionamiento con el teclado de control (F00.11 = 0), se puede poner en marcha o apagar el convertidor directamente desde el teclado.
Los pasos son los siguientes:
1. Enchufar la alimentación de entrada.
2. Establecer los parámetros del motor de acuerdo con los indicados en la placa de identificación del
motor: F08.00 (potencia indicada), F08.01 (tensión indicada), F08.02 (corriente indicada), F08.03
(frecuencia indicada) y F08.04 (velocidad indicada).
3. Establecer la frecuencia de funcionamiento: F00.13, rango de 0.0 – 50.0Hz.
4. Establecer el tiempo de aceleración y deceleración: F03.01 (tiempo de aceleración), F03.02
(tiempo de deceleración).
5. Apretar el botón (estándar) / RUN (opcional) para poner en marcha el convertidor
6. Apretar el botón (estándar) / STOP (opcional) para apagar el convertidor
-25-

6.4 Funcionamiento con el terminal de control
Cuando el terminal controla el funcionamiento (F00, 11 = 1), se puede poner en marcha y apagar elconvertidor directamente con el terminal y controlar la frecuencia de funcionamiento y la dirección del motor.
Los pasos son los siguientes:
1. Después de instalar el cableado de la forma indicada abajo, enchufar la alimentación de entrada.
2. Ajustar el canal de control al control de terminal (F00.11 = 1).
3. Establecer la frecuencia AI (F00.10 = 3, F16.01 =2).
4. Ajustar el terminal D11 para marcha adelante (F15.00 = 2) y el terminal D12 para marcha atrás.
5. Establecer los parámetros del motor según los indicados en la placa de identificación del motor:
F08.00 (potencia indicada), F08.01 (tensión indicada), F08.02 (corriente indicada), F08.03
(frecuencia indicada) y F08.04 (velocidad indicada).
6. Establecer el tiempo de aceleración y deceleración: F03.01 (tiempo de aceleración), F03.02
(tiempo de deceleración).
7. Cuando K1 está cerrado, el motor está en funcionamiento; cuando K2 está cerrado el motor
funciona marcha atrás.
8. Si K1 y K2 están cerrados o desconectados al mismo tiempo, el convertidor se apaga.
6.5 Funcionamiento por comunicación externa
En el modo de funcionamiento de comunicación (F00.11 = 2), los parámetros de funcionamiento, estado y el control del convertidor se leen y se escriben desde un ordenador principal.
En este modo, el convertidor está en modo esclavo.
Ver apartado 4.4 Teclado o ordenador externo, página 19.
Para más detalles, ver Capítulo 9 MODBUS protocolo de comunicación, página 59.
Para ajustes específicos, ver apartado 9.6 Ejemplos aplicables, página 66.
-26-

Capítulo 7: Introducción detallada a las funciones
7.1 F00: Parámetros básicos
Parámetro Descripción del parámetro Rango [valor predeterminado]
F00.06 Frecuencia máxima de salida 50.0 – 1000.0 [50.0Hz]
Definir la frecuencia máxima de salida permitida. Se debe establecer según lo indicado en la placa de identificación del motor y el
modo de empleo.
F00.08 Frecuencia máxima de funcionamiento 0.0 – F00.06 [50.0Hz]
F00.09 Frecuencia mínima de funcionamiento 0.0 – F00.08 [0.0Hz]
F00.10 Ajuste del acceso a la configuración de frecuencia
0 – 4 [0]
0: Teclado digital1: Terminal digital2: Comunicación SCI3: Modo analógico4: Ajuste de impulso de terminal
F00.11 Lista de opciones de control 0 – 2 [0]
0: Control con el teclado1: Control con los terminales2: Comunicación SCI
F00.13 Configuración de la frecuencia de funcionamiento digital original
0.0 – F00.08 [50.0Hz]
F00.14 Configuración de control de frecuencia 0.0 – F00.08 [50.0Hz]
Habilitar solo cuando F00.10 = 0.1Cuando se cambia F00.13, el valor nuevo remplaza la frecuencia establecida.
Unidades: Guardar frecuencia al apagar 0: No 1: Guardar
Decenas: Frecuencia establecida al apagar 0: Mantener frecuencia al apagar 1: Restablecer a F00.13 al apagar
Centenares: Guardar frecuencia durante la comunicación 0: No 1: Guardar
Miles: Guardar frecuencia al cambiar el acceso a frecuencia 0: No 1: Guardar. Cuando se cambia el acceso a
los ajustes de frecuencia desde el teclado alterminal digital y de vuelta al teclado, el teclado mantiene la última frecuencia establecida.
F00.15 Configuración digital de la frecuencia de funcionamiento despacio
0.0 – F00.08 [50Hz]
-27-

Parámetro Descripción del parámetro Rango [valor predeterminado]
F00.17 Sentido del funcionamiento del motor 0, 1 [0]
0: Mismo sentido1: Sentido contrario
F00.19 Tiempo muerto entre la rotación positiva y negativa
0.0 – 3600.0 [0.0s]
Define el tiempo transitorio cuando la frecuencia de salida es 0 en la rotación.
F00.20 Activación del teclado externo 00 – 21 [00]
Unidades: Activación de botones 0: Activado. El teclado está habilitado si está conectado al convertidor 1: Desactivado. El teclado está deshabilitado si está conectado al convertidor
Decenas: Activación del potenciómetro 0: Preferencia al potenciómetro del teclado externo.
La tensión se muestra en el teclado externo, si no hay teclado externo conectado alconvertidor la tensión se muestra en el teclado integrado.
1: Potenciómetro del teclado integrado. Solo se muestra la tensión del teclado integrado.
2: Potenciómetro del teclado externo. Solo muestra la tensión en el teclado externo.
F00.21 Activación del modo hibernar 0 – 2 [0]
0: Desactivado. La hibernación está deshabilitada.1: Activado 1. Cuando la frecuencia establecida de funcionamiento es ≤ a la frecuencia mínima de funcionamiento (F00.09), después del tiempo de retardo de hibernación (F00.24), el convertidor entra automáticamente en el modo hibernación.2: Activado 2. Cuando la frecuencia establecida de funcionamiento es ≤ a la frecuencia de hibernación (F00.25), después del tiempo de retardo de hibernación (F00.24), el convertidor entra automáticamente en el modo hibernación.
F00.22 Tiempo de salida del modo hibernación 0.0 – 360.0 [0.0s]
Cuando el convertidor está en modo hibernación y la frecuencia establecida es > a la frecuencia mínima de funcionamiento (F00.09) o la frecuencia de hibernación (F00.25), transcurrido el tiempo de salida de hibernación (F00.22), el convertidor sale del modo hibernación y vuelve al funcionamiento.
F00.24 Tiempo de retardo de hibernación 0.0 – 3600.0 [0.0]
F00.25 Frecuencia de hibernación 0.00 – F00.08 [0.50Hz]
-28-

7.2 F01: Parámetros de protección
Parámetro Descripción del parámetro Rango [valor predeterminado]
F01.00 Contraseña de usuario 00000 – 65535 [00000]
XXXXX: Una vez establecida una contraseña (no todos ceros), la contraseña de usuario estará activada. Solo se puede ver el valor de los parámetros en la pantalla.
Para cambiar un parámetro es necesario introducir la contraseña correcta.
00000: Al volver a poner 00000 la contraseña de usuario queda desactivada y la contraseña anterior borrada.
Establecimiento de contraseña: Después de establecer la contraseña, se puede apretar el botón / PRG para volver a la pantalla de funcionamiento / apagado o esperar 5 minutos y la contraseña estará activada.
F01.01 Modo del menú de configuración 0, 1 [0]
0: Menú de configuración estándar. Muestra todos los parámetros.1: Menú de configuración de verificación. Muestra solo los parámetros distintos a los valores predeterminados
F01.02 Descarga de parámetros 0 – 4 [0]
0: Sin acción1: Restablecer el parámetro predeterminado Restablecer el parámetro predeterminado: Establecer F01.02 = 1 y pulsar
y se restablecer el valor predeterminado al ver “reset” en la pantalla.2: Copiar el parámetro 1 guardado en el teclado al módulo de control para actualizarel valor.3: Copiar el parámetro 2 guardado en el teclado al módulo de control para actualizarel valor.4: Borrar el registro de fallos. Borrar todos los registros de información de fallos guardados en F20.21 – F20.33.Nota:1. F01.00, F01.02, F01.03, grupos F08, F19.19, F19.24, F20.2 – F20.37, F23.00 nose pueden copiar.2: La copia de parámetros solo funciona con el teclado externo.
F01.03 Subir parámetro al teclado 0 – 2 [0]
0: Sin acción. El convertidor está en modo de lectura normal.1: El valor de parámetro actual se copia a la memoria de parámetros 1 del teclado.2: El valor de parámetro actual se copia a la memoria de parámetros 2 del teclado.Nota:1. F01.00, F01.02, F01.03, grupos F08, F19.19, F19.24, F20.2 – F20.37, F23.00 nose pueden copiar.2: La copia de parámetros solo funciona con el teclado externo.
-29-

7.3 F02: Parámetros de control de arranque y apagado
Parámetro Descripción del parámetro Rango [valor predeterminado]
F02.02 Frecuencia DWELL del arranque 0.0 – F00.08 [0.0Hz]
F02.03 Duración de la frecuencia DWELL durante elarranque
0.00 – 10.00 [0.00]
F02.02 define la frecuencia DWELL durante elarranque del convertidorF02.03 define la duración de la frecuencia DWELLdurante el arranque. F02.02 = 0 o F02.03 = 0, la frecuencia DWELL
durante el arranque no se aplica.
F02.04 Ajuste del frenado de CC 0 – 100% (corriente indicado)[50%]
F02.05 Tiempo del inicio del frenado de CC 0.00 – 60.00 [0.00s]
F02.04 define el valor de la corriente al iniciar y parar el frenado de CC Si F02.04 > 10 x corriente indicada del motor, entonces: corriente de frenado = 10
x corriente indicada del motor. Si F02.05 = 0, no se activa el procedimiento de frenado de CC
F02.13 Modo de apagado 1, 2 [2]
1: Apagado libre. El convertidor apagará la potencia de salida una vez recibido el orden de apagado, el motor se detiene por inercia mecánica.2: Deceleración hasta el apagado. Al recibir el orden de apagado, el convertidor se detiene con el tiempo de deceleración (F03.02).
F02.14 Frecuencia DWELL del apagado 0.0 – F00.08 [0.0Hz]
F02.15 Duración de la frecuencia DWELL durante elapagado
0.00 – 10.00 [0.00]
F02.14 define la frecuencia DWELL delconvertidor durante el apagado, F02.15 definela duración de la frecuencia DWELL duranteel apagado (F02.14). F02.14 = 0 o F02.15 = 0, no se aplica la
frecuencia DWELL durante el apagado. F02.13 = 2 (deceleración de apagado) y
F02.14, F02.15 no son 0, la frecuencia DWELL se aplica.
F02.16 Frecuencia para iniciar el frenado de CC 0.0 – 50.0 [0.5Hz]
F02.18 Tiempo para el frenado de CC 0.00 – 60.00 [0.00s]
Durante el apagado, cuando la frecuencia de funcionamiento disminuye a F02.16, seinicia el frenado de CC F02.13 = 2 (tiempo de deceleración) y F02.14 – F02.16, F02.18 no son 0:
Si F02.14 ≥ F02.16, primero se pasa a la frecuencia DWELL y cuando la duración de la frecuencia DWELL llega a F02.15, se inicia el frenado de CC
Si F02.14 < F02.16, al reducirse la frecuencia a F02.16, se inicia el frenado de CC.
F02.18 = 0, no se aplica el frenado CC.
-30-

7.4 F03: Parámetro de aceleración y deceleración
Parámetro Descripción del parámetro Rango [valor predeterminado]
F03.01 Tiempo de aceleración 1 0.01 – 600.00 [10.00s]
F03.02 Tiempo de deceleración 1
F03.03 Tiempo de aceleración 2
F03.04 Tiempo de deceleración 2
F03.05 Tiempo de aceleración 3
F03.06 Tiempo de deceleración 3
F03.07 Tiempo de aceleración 4
F03.08 Tiempo de deceleración 4
El tiempo de aceleración define el tiempo deaceleración del convertidor desde 0 hasta F00.06(frecuencia máxima de salida) en modo línea.El tiempo de aceleración define el tiempo dedeceleración del convertidor desde F00.06(frecuencia máxima de salida) hasta 0 en modolínea.
Cambio de los tiempos de aceleración ydeceleración: Durante el funcionamiento del convertidor se pueden usar los terminales DI 26 y 27 o F03.09, F03.10 para establecer los tiempos de aceleración y deceleración.
Nota:1. Si la resistencia de frenado no está instalada correctamente, la deceleración repentina o de alta carga de inercia puede causar un fallo de sobretensión.2. Para evitar fallos de sobretensión, es mejor elegir la resistencia de frenado adecuada, aumentar el tiempo de frenado y ajustar F19.18, F19.19.
F03.09 Intercambio de los tiempos de aceleración 2 y 1 0.0 F00.08 [0.0Hz]
Cuando la frecuencia de funcionamiento es menor a F03.09, se acelera con el tiempo 2; si no, se acelera con el tiempo 1.- No se aplica cuando los terminales no se han configurado con los tiempos de aceleración y deceleración (los DI se ajustan con los parámetros 26 y 27).
F03.10 Intercambio de los tiempos de deceleración 2 y 1 0.0 F00.08 [0.0Hz]
Cuando la frecuencia de funcionamiento es menor a F03.10, se decelera con el tiempo2; si no, se decelera con el tiempo 1.- No se aplica cuando los terminales no se han configurado con los tiempos de aceleración y deceleración (los DI se ajustan con los parámetros 26 y 27).
F03.15 Tiempo de aceleración de funcionamiento despacio
0.01 – 600.00 [6.00s]
F03.16 Tiempo de deceleración de funcionamiento despacio
0.01 – 600.00 [6.00s]
F03.15, F03.16 definen el tiempo de aceleración y deceleración durante el funcionamiento despacio.
-31-

7.5 F04: Parámetro de control de proceso PID
El control de proceso PID se utiliza normalmente para medir la presión, el nivel de líquido, la temperatura y estados físicos similares.
La entrada analógica máxima AI o la Frecuencia máxima de impulso de entrada DI4 F16.17 se corresponden con la Frecuencia máxima de salida (F00.06).
El proceso se indica en el siguiente diagrama:
Parámetro Descripción del parámetro Rango [valor predeterminado]
F04.00 Control de proceso PID 0, 1 [0]
0: No se aplica el control de proceso PID1: Se aplica en control de proceso PID
F04.02 Acceso a la información de respuesta 0, 1 [0]
0: Respuesta analógica. Respuesta por el terminal AI (F16.01 = 5).1: Respuesta por el terminal de impulso. Respuesta por el terminal DI4 (F15.03 =53).
F04.03 Ajuste dado del parámetro digital 0 – 100.0 [0.0%]
F04.04 Ganancia proporcional (P) 0.00 – 10.00 [2.00]
F04.05 Tiempo integral (I) 0.01 – 10.00 [1.00s]
F04.07 Tiempo derivado (D) 0.00 – 10.00 [0.00s]
F04.08 Valores de limite diferencial 0.0 – F00.08 [20Hz]
F04.09 Periodo de muestreo (T) 0.01 – 50.00 [0.10s]
F04.03 define el ajuste del regulador PID.F04.04, F04.05, F04.07 define el parámetro del proceso PID.F04.08 define el límite diferencial superior del proceso PID.F04.09 define el periodo de muestreo para la cantidad de la información de respuesta, el regulador funciona una vez por periodo. F04.07 = 0, no se aplican los valores diferenciales.
-32-

Parámetro Descripción del parámetro Rango [valor predeterminado]
F04.10 Limite de derivación 0.0 – 20.0 [2.0%]
Define el valor máximo permitido dederivación-
Comparado con el valor de salida y elvalor del proceso PID. Cuando la respuesta está dentro de
F04.10, el regulador deja de funcionar.Ver el diagrama de la derecha.
Establecer adecuadamente F04.10 ayudaa equilibrar la precisión y estabilidad dela salida del sistema.
F04.16 Ajuste del valor integral. 0, 1 [0]
0: Alcanzar los límites superior e inferior del valor integral y parar.1: Alcanzar los limites superior e inferior del valor integral y continuar.
F04.17 Tiempo para el filtro de salida PID 0.01 – 10.00 [0.05s]
Define la duración para el filtro de la salida del proceso PID.
F04.18 Inversión de la salida PID 0, 1 [0]
0: La inversión del PID no está permitida. 0 para limitar cuando la salida del PID es negativa.1: Se permite la inversión de la salida.
F04.19 Limite de la frecuencia de la inversión de la salida PID
0.0 – F00.08 [50.0Hz]
El limite superior de la frecuencia de la inversión PID. F04.18 = 1 (permitir la inversión del PID) se permite.
-33-

7.6 F05: Parámetros de curva externa determinadas
Parámetro Descripción del parámetro Rango [valor predeterminado]
F05.01 Mínimo determinado de línea 0.0 – F05.03 [0.0%]
F05.02 Mínimo determinado de línea correspondiente
0.0 – 100.0 [0.0%]
F05.03 Máximo determinado de línea F05.01 – 100.0 [100.0%]
F05.04 Máximo determinado de línea correspondiente
0.0 – 100.0 [100.0%]
F05.01 – F05.04 definen la línea AI y DI. Se puede realizar de característica positiva (diagrama de la izquierda) y negativa (diagrama de la derecha).
En el diagrama: AI es el preajuste analógico, DI4 es el preajuste de impulso. Cuando el preajuste analógico es del 100%, corresponde 10V 0 20mA. Cuando el preajuste DI4 es del 100%, corresponde F16.17 (frecuencia máxima
de impulso del terminal de entrada DI4).
F05.17 Salto de frecuencia F00.09 – F00.08 [0.0Hz]
F05.20 Rango de salto de frecuencia 0.0 – 30.0 [0.0Hz]
El parámetro de salto de frecuencia permite al convertidor evitar puntos de frecuencia de resonancia mecánica.
La frecuencia de convertidor puedesaltar en funcionamiento en el puntoF05.17 mostrado en el diagrama dela derecha.
Durante la aceleración y deceleraciónatraviesa el rango de salto defrecuencias manteniendo lafrecuencia de salida pero no permiteel funcionamiento continuo en elrango.
La frecuencia salta pero la salida es continua.
-34-

7.7 F06: Paarámetro de velocidad variable
Parámetro Descripción del parámetro Rango [valor predeterminado]
F06.00 Instrucción de frecuencia múltiple 1 F00.09 – F00.08 [5.0Hz]
F06.01 Instrucción de frecuencia múltiple 2 F00.09 – F00.08 [5.0Hz]
F06.02 Instrucción de frecuencia múltiple 3 F00.09 – F00.08 [5.0Hz]
F06.03 Instrucción de frecuencia múltiple 4 F00.09 – F00.08 [5.0Hz]
F06.04 Instrucción de frecuencia múltiple 5 F00.09 – F00.08 [5.0Hz]
F06.05 Instrucción de frecuencia múltiple 6 F00.09 – F00.08 [5.0Hz]
F06.06 Instrucción de frecuencia múltiple 7 F00.09 – F00.08 [5.0Hz]
Determina el modo de funcionamiento de velocidad variable con la velocidad del valor inicial.
7.8 F08: Parámetros del motor
Parámetro Descripción del parámetro Rango [valor predeterminado]
F08.00 Potencia indicada del motor 0.2 – 5.5kW [Especificado según tipo]
F08.01 Tensión indicada del motor 0V – Tensión indicada del convertidor[Especificado según tipo]
F08.02 Corriente indicada del motor 0.01 – 99.99A [Especificado según tipo]
F08.03 Frecuencia indicada del motor
F08.04 RPM indicada del motor 1 – 24000rpm [Especificado según tipo]
Los parámetros F08.00 – F08.04 se tienen que establecer según la placa de identificación del motor.
F08.06 Autoajuste de los parámetros del motor
0, 1 [0]
0: Sin acción1: Autoajuste del motor. En estado estático, se mide automáticamente la resistencia del estátor y el valor
medido se guarda en F08.07. Solo funciona el autoajuste de los parámetros del motor en el modo de teclado
(F00.11 = 0).
Pasos para el autoajuste de los parámetros del motor:1: Establecer F08.00 – F08.04 según la placa de identificación del motor.2: F08.06 = 1, pulsa , pulsa o RUN para iniciar el autoajuste. Se muestra “tune” en la pantalla.3: Cuando el indicador FWD o REV parpadea, el autoajuste se ha terminado. F08.06vuelve automáticamente a 0.
F08.07 Resistencia del estator del motor 0.00 – 99.99Ω [Especificado según tipo]
-35-

7.9 F09: Parámetros de control V/f
Parámetro Descripción del parámetro Rango [valor predeterminado]
F09:01 Valores de frecuencia V/f del motor F3 F09.03 – 100.0 (F08.03) [100.0%]
F09.02 Valores de tensión V/f del motor F3 F09.04 – 100.0 (F08.01) [100.0%]
F09.03 Valores de frecuencia V/f del motor F2 F09.05 – F09.01 (F08.03) [0.0%]
F09.04 Valores de tensión V/f del motor F2 F09.06 – F09.02 (F08.01) [0.0%]
F09.05 Valores de frecuencia V/f del motor F1 0.0 – F09.03 (F08.03) [0.0%]
F09.06 Valores de tensión V/f del motor F1 0.0 – F09.04 (F08.01) [0.0%]
F09.01 – F09.06 es una curva V/f ajustable. Usando V1/F1, V2/f2, V3/f3 se establece una curva V/f de tres puntos que permite
aplicar una carga de característica especial. Se tiene que ajustar la curva de forma adecuada
según las condiciones de funcionamiento paracumplir las mejores características de carga.
F09.01, F09.03, F09.05 son el porcentaje comparado con la frecuencia indicada delmotor (F08.03).
F09.02, F09.04, F09.06 son el porcentajecomparado con la tensión indicada del motor(F08.01).
F09.07 Aumento de par de fuerzas del motor 0.0 30.0 [2.0%]
F09.08 Puntos limite de la subida manual de par de fuerza del motor
0.0 – 50.0 (F08.03) [30.0%]
Para compensar por las características del par de baja frecuencia, se puede mejorar la compensación de la salida de tensión.
F09.07 es la subida manual de par. A 0, es automático. Debe de estar ajustado
según las indicaciones de la placa deidentificación junto con la frecuenciaindicada (F08.03).
F09.08 es el porcentaje comparado con la frecuencia indicada del motor (F08.03). F09.08 máx = F08.03 x 50%
F09.09 Ganancia de compensación de deslizamiento del motor
0.0 300.0 [0.0%]
F09.10 Tiempo de filtrado de compensación de deslizamiento del motor
0.01 – 10.00 [0.10s]
F09.11 Limite de compensación de deslizamiento delmotor
0.0 – 250.0 [200.0%]
F09.12 Tiempo normal de compensación de deslizamiento del motor
0.1 – 25.0 [2.0s]
-36-

Parámetro Descripción del parámetro Rango [valor predeterminado]
F09.14 Función AVR (regulador de tensión automático)
0 – 2 [1]
0: No se aplica1: Funcionamiento constante.2: Solo en la deceleración. Cuando la tensión de entrada se varia de la indicada, la tensión de salida se regular
con la función AVR. Como resultado el AVR funciona con normalidad, sobre todo cuando la tensión de entrada es superior a la indicada.
Durante la deceleración la energía de la carga vuelve al convertidor, la tensión del embarrado sube, F09.14 = 0 o 2, la corriente es mayor, F09.14 = 1, la decelerar el motor la corriente es menor.
F09.15 Modo de reducción de la oscilación del motor 0, 1 [0]
0: Modo de reducción de la oscilación 11: Modo de reducción de la oscilación 2
F09.16 Factor de reducción de la oscilación del motor 0 – 200 [50]
Usado para reducir la oscilación del motor durante su funcionamiento. Si la carga de la corriente de salida varía de forma repetida, se puede ajustar F09.16
al valor de fábrica para reducir la oscilación y conseguir el funcionamiento suave del motor.
7.10 F15: Parámetros de Salida digital / Terminales de salida
Parámetro Descripción del parámetro Rango [valor predeterminado]
F15.00 Parámetro DI1 0 – 51 [2]
F15.01 Parámetro DI2 0 – 51 [3]
F15.02 Parámetro DI3 0 – 51 [0]
F15.03 Parámetro DI4 0 – 53 [0]
0: Reservado. Terminal en estado inoperativo aunque haya señal. Los terminales DI pueden tener asignado el valor de 0 (reservado) para evitar su
uso por error.1: Habilitado por el convertidor Habilitado, funciona por convertidor. Deshabilitado, no permite el funcionamiento
durante el apagado. Con el terminal DI en 1 (habilitado por el convertidor), el convertidor de
frecuencia por defecto está activado.2, 3: Habilitado por FWD / REV Los terminales DI se pueden establecer en FWD / REV para controlar el arranque y
apagado del convertidor. Ver F15.16. Solo se aplica en modo de control de terminal (F00.11 = 1).4: Control de funcionamiento con el sistema de tres cables Ver F15.16.8: Frecuencia simulada. El canal de ajuste de la frecuencia se establece en modo simulación. Prioridad al canal de ajuste de frecuencia: frecuencia en modo simulación
(parámetro 8) > terminal de frecuencia variable 1-3 (parámetro 13-15) > F00.10 canal de ajuste de frecuencia
-37-

Parámetro Descripción del parámetro Rango [valor predeterminado]
11: Terminales de cambio de control. Al estar habilitado, el canal de control de funcionamiento se cambia al terminal
del canal de control de funcionamiento. Prioridad de canal de control de funcionamiento: control asignado al terminal
(parámetro 11) > F00.11 canal de control de funcionamiento. 13 – 15: Terminales de frecuencia variable 1 – 3 (K1 – K3). Con la combinación lógica de terminales DI, se puede definir una curva de 7
puntos para la velocidad de funcionamiento. Los detalles están en la tabla de abajo.
Establecer los parámetros de funcionamiento de 3 terminales DI para conseguir elcontrol de funcionamiento de 7 periodos.
Establecer los parámetros de funcionamiento de 2 terminales DI para conseguir elcontrol de funcionamiento de 3 periodos.
Establecer el parámetro de funcionamiento de 1 terminal DI para realizar cambios desde la frecuencia F00.10 (canal de ajuste de frecuencia) a la frecuencia variable.
K3 (No 15)
K2 (No 14)
K1 (No 13)
Ajuste de frecuencia
0 0 0 Frecuencia establecida F00.10
0 0 1 Instrucción de frecuencia variable 1 F06.00)
0 1 0 Instrucción de frecuencia variable 2 F06.01)
0 1 1 Instrucción de frecuencia variable 3 F06.02)
1 0 0 Instrucción de frecuencia variable 4 F06.03)
1 0 1 Instrucción de frecuencia variable 5 F06.04)
1 1 0 Instrucción de frecuencia variable 6 F06.05)
1 1 1 Instrucción de frecuencia variable 7 F06.06)17, 18: Instrucciones de aumento (UP) / disminución (DN) de frecuencia. Cuando se utiliza el terminal DI para aumentar o disminuir la frecuencia, hay que
cambiar el teclado por el control remoto. Ver la tabla de abajo. El ritmo de aumento o disminución se establece con F15.12. La frecuencia (F00.10 = 1) se aplica solo a traves del terminal de ajuste de
frecuencia (F00.10 = 1).UP (No 17) DN (No 18) Tendencia de cambio de frecuencia
0 0 Mantener la frecuencia actual
0 1 Disminuir frecuencia
1 0 Aumentar frecuencia
1 1 Mantener la frecuencia actual19: Restablecer el ajuste de frecuencia auxiliar. Para establecer los ajustes de frecuencia auxiliar, establecer la frecuencia según la
principal.20, 21: Entrada de control de punto FWD / REV (JOGF / JOGR). Usar el control de terminales para realizar el funcionamiento dinámico del
control de punto. Hay que establecer la frecuencia de funcionamiento F00.15.
-38-

Parámetro Descripción del parámetro Rango [valor predeterminado]
26, 27: Terminales 1, 2 de control del tiempo de aceleración y deceleración Prioridad de tiempo de deceleración: los terminales 26, 27 determinan el tiempo
de deceleración > F03.09, F03.10 determinan el tiempo de deceleración. Con los terminales de deceleración 1, 2, la combinación lógica permite 4
opciones. Ver la tabla de abajo. Usando los 2 terminales de deceleración se puede elegir entre 4 tiempos de
deceleración. Usando solo un terminal de deceleración se puede elegir entre 2 tiempos de
deceleración.
Terminal 2 Acc. / Dec. (No 27)
Terminal 1 Acc. / Dec. (No 26)
Tiempo de aceleración y deceleración
0 0 Tiempo de acc. y dec. 1
0 1 Tiempo de acc. y dec. 2
1 0 Tiempo de acc. y dec. 3
1 1 Tiempo de acc. y dec. 4
41, 42: Apagado abierto / cerrado. Al recibir la señal del terminal, el convertidor de frecuencia apaga la salida y
para con la inercia mecánica.44, 45: Entrada de fallos externos abierta / cerrada. La señal de fallos tiene dos modos de entrada: abierta o cerrada. El convertidor
de frecuencia puede detectar fallos en aparatos periféricos por los terminales. Al recibir una señal de fallo externo, el convertidor se apaga y muestra fallo de
equipo externo (E0024).46: Reinicio externo. Restablecer y reiniciar el convertidor después de ocurrir un fallo.50: Reinicio del contador. Para reiniciar el contador interno, usado junto con el parámetro 51.51: El contador interno cuenta el impulso de entrada. Cuando se apaga el valor del contador se guarda. Impulso de frecuencia máxima: 200Hz. Ver F15.37, F15.38.53: Entrada de frecuencia de impulso (DI4). El terminal DI4 puede recibir la señal de impulso como frecuencia, la relación
entre la entrada de frecuencia de impulso y la frecuencia establecida. Ver F05.01 – F05.04.
F15.12 Terminal para el aumento y la disminución del ritmo de aceleración y deceleración.
0.0 – 99.9 [1.0Hz/s]
Define los terminales DI/DN (parámetro 17/18) para cambiar el ritmo de cambio de la frecuencia establecida.
F15.14 Número del filtro de detección del terminal 0 – 10000 [2]
Confirmar los señales de los terminales DI para prevenir errores en su funcionamiento.
-39-

Parámetro Descripción del parámetro Rango [valor predeterminado]
F15.15 Parámetro de entrada de terminal positivo y negativo
0000 – 100F [0000]
Define la lógica positiva o negativa de los terminales DI, cada unidad (binario) de F15.15 representa terminales DI diferentes, demostrado en la tabla siguiente. 0: Lógica positiva:
El terminal DI y los correspondientes son válidos durante la conexión y no válidosdurante la desconexión.
Tensión de entrada AI ≥ 6V, entrada es válida, tensión de entrada AI ≤ 4V, no válida.
1: Lógica negativa: El terminal DI y los correspondientes son válidos durante la desconexión y no
válidos durante la conexión. Tensión de entrada AI ≥ 6V, entrada no es válida, tensión de entrada AI ≤ 4V, es
válida.Bit12 Bit3 Bit2 Bit1 Bit0
AI DI4 DI3 DI2 DI1
F15.16 Modo de funcionamiento FWD / REV 0 – 3 [0]
Determina 4 formas para controlar el convertidor con los terminales DI. F15.00 – F15.03 con el valor de 2, el terminal DI indica marcha adelante, mostrado
como Dlc en el diagrama de abajo. F15.00 – F15.03 con el valor de 3, el terminal DI indica marcha atrás, mostrado
como Dly en el diagrama de abajo. F15.00 – F15.03 con el valor de 4, el terminal DI indica modo de funcionamiento de
sistema de tres cables, mostrado como Dlz en el diagrama de abajo.0, 1: Modo de funcionamiento de dos cables 1, 2. Bajo el modo de control de terminal, si la señal de apagado se envia por otra fuente
(parámetros de terminal DI 41, 42, 44, 45), aunque el terminal de FWD/REV es válido, el convertidor deja de funcionar.
Para volver a arrancar el convertidor, hay que activar otra vez los terminales DI FWD/REV, mostrado en el diagrama de abajo.
Terminal desconectado es0, cerrado es 1
Control defuncionamiento
K2 K1 F15.16=0 F15.16=1
0 0 Parada Parada
1 0 Marcha atrás Parada
0 1 Adelante Adelante
1 1 Parada Marcha atrás
2: Modo de funcionamiento de tres cables 1. No ocurre cambio en SB2, SB3, se mantiene el sentido de funcionamiento
establecido.3: Modo de funcionamiento de tres cables 1. SB2 se cambia de válido a no válido, el estado de funcionamiento se mantiene.
-40-

Parámetro Descripción del parámetro Rango [valor predeterminado]
SB1: Botón de apagado normalmente cerrado
SB2: Botón de marcha adelante normalmente abierto
SB3: Botón de marcha atrás normalmente abierto
K: Terminales de cambio de sentido (PMCSx) K = 0 (marcha adelante) K = 1 (marcha
atrás) SB1: Botón de apagado normalmente
cerrado SB2: Botón de funcionamiento
normalmente abierto
F15.19 Parámetro DO 0 – 38 [2]
F15.20 Parámetro de relé 0 – 31 [3]
0: Reservado El terminal de salida está en estado sin funcionalidad.2: El convertidor está en funcionamiento (RUN). Cuando el convertidor está en funcionamiento, indica la salida.3: El inversor está funcionando marcha adelante. Cuando el convertidor está en funcionamiento marcha adelante, hay señal de
salida.4: El convertidor está funcionando marcha atrás. Cuando el convertidor está en funcionamiento marcha atrás, hay señal de salida.5: Frenado CC. Cuando el inversor está frenando por CC, hay señal de salida.9: Señal de detección de nivel de frecuencia (FDT). Ver por ejemplo F15.31, F15.32.11: Llegada de frecuencia (FAR). Ver F15.27 para más información.20: Salida de datos por comunicación SCI. Hay comunicación SCI que controla directamente el DO o la seña de indicación
de la salida relé.21: Asignar tiempo de funcionamiento. Ver F15.36 para más información.23: Asignar el valor de conteo. Ver F15.37, F15.38.24: Especifica el valor de conteo. Ver F15.37, F15.38.31: Fallo del convertidor Cuando ocurre un fallo en el convertidor se indica en la salida.38: Salida de pulso (solo DO). DO es la salida de pulso. Ver F16.21.
-41-

Parámetro Descripción del parámetro Rango [valor predeterminado]
F15.27 Detección del rango del alcance de la frecuencia (FAR)
0.0 100.0 [2.5Hz]
Cuando la frecuencia de salida del convertidorestá dentro más o menos del rango (Fsetdiagrama de la derecha). La señal de pulso desalida DO se muestra a la derecha.
F15.31 Nivel eléctrico FDT 0.0 F00.06 [50.0Hz]
F15.32 Demora FDT -F00.06 – F00.06 [1.0Hz]
Cuando la frecuencia de salida sobrepasa la frecuencia F15.31, la salida DO emite señal hasta que la frecuencia de salida reduce a una frecuencia especifica (F15.31 – F15.32), mostrado en la imagen de abajo.
F15.36 Tiempo de funcionamiento 0 – 65535 [0h]
Cuando el tiempo de funcionamiento del convertidor alcanza F15.36, el DO o relé emite una señal de pulso de 500ms.
-42-

Parámetro Descripción del parámetro Rango [valor predeterminado]
F15.37 Preajuste del valor de alcance del contador F15.38 – 9999 [0]
F15.38 Preajuste del valor específico de conteo 0 – F15.37 [0]
F15.37 determina el número de pulso entrado por el terminal DI (parámetro No. 51). El DO o relé emite una señal y el contador externo se cancela.F15.38 determina el número de pulso entrado por el terminal DI (parámetro No. 51). El DO o relé emite una señal hasta llegar al valor de conteo.Ejemplo: F15.37 es 7, F15.38 es 3, a DI1 se asigna a la entrada de activación del contador (F15.00 = 51). A DO se asigna el valor de alcance para el contador (F15.19 = 23). Cuando DI1
emite el séptimo pulso, DO emite una señal. Cuando DI1 emite el octavo pulso, laseñal DO vuelve a su estado anterior.
A DO se asigna el valor específico del contador (F15.19 = 24).. Cuando DI1 emiteel tercer pulso, DO emite una señal hasta que se alcanza el valor de conteo 7, demostrado en la imagen de abajo.
F15.43 Demora del terminal de salida 0.0 – 100.0 [0.0s]
F15.44 Opción de terminal AI (ADI) 0 – 51 [0]
Funcionan igual a los terminales DI1 – DI3 (F15.00 – F15.02). Cuando F15.44 no es 0, el parámetro ADI es válido y 0 es el único parámetro AI.
7.11 F16: Parámetros e entrada y salida de los terminales analógicos.
Parámetro Descripción del parámetro Rango [valor predeterminado]
F16.00 Parámetro del potenciómetro del teclado 0 – 5 [5]
F16.01 Parámetro AI 0 – 5 [2]
0: Reservado2: Ajuste de frecuencia3: Ajuste de frecuencia auxiliar5: Proceso de respuesta PID
-43-

Parámetro Descripción del parámetro Rango [valor predeterminado]
F16.05 Compensación AI - 100.0 – 100.0 [0.0%]
F16.06 Ganancia AI 0.00 – 10.00 [1.00]
F16.07 Tiempo de filtrado AI 0.01 – 10.00 [0.05s]
Cuando la entrada AI se establece en el canal de ajuste de frecuencia abierta, la entrada analógica requiere ser filtrada y el procesamiento del cálculo de la compensación y la ganancia para conseguir la entrada analógica real. La relación entre la entrada AI y la frecuencia establecida se ajusta con F05.01 –
F05.04. Formula de cálculo: Valor calculado = F16.06 x entrada real AI + F16.05.
F16.07 determina el tiempo de filtrado del canal y filtra la señal de entrada. A mayor tiempo de filtrado, mayor protección contra interferencias pero mayor el
tiempo de respuesta. A menor tiempo de filtrado, menor tiempo de respuesta.
F16.17 Frecuencia máxima de pulso de entrada del terminal DI4
0.0 – 50.0 [10.0kHz]
Determina la frecuencia máxima de pulso de entrada del terminal DI4.
F16.18 Tiempo de filtrado del pulso de entrada del terminal DI4
0 – 500 [10ms]
Para filtrar variaciones en el pulso de entrada del terminal DI4.
F16.19 Parámetro AO 0 – 12 [2]
F16.21 Parámetro DO 0 – 12 [0]
0: Reservado2: Preajuste de frecuencia (0 – frecuencia máxima de salida).3: Rpm del motor (0 – la frecuencia máxima de salida corresponde a la velocidad).5: Corriente de salida (0 – 2 veces la tensión indicada del convertidor).11: Tensión de salida (0 – 1.2 veces la tensión indicada del convertidor).12: Tensión del bus CC (0 – 2.2 la tensión indicada del convertidor).
F16.22 Compensación AO -100.0 – 100.0 [0.0%]
-44-

Parámetro Descripción del parámetro Rango [valor predeterminado]
F16.23 Ganancia AO 0.0 – 200.0 [100%]
Si el usuario tiene que ajustar la relación proporcional de salida AO, se puede hacer con la ganancia de salida. Formula de cálculo: Salida real AO = F16.23 x valor calculado + F16.22.
F16.26 Frecuencia máxima de pulso de salida del terminal DO
0.1 – 50.0 [10.0kHz]
Determina la frecuencia máxima de pulso de salida del terminal DO
7.12 F17: Parámetro de comunicación SCI
Parámetro Descripción del parámetro Rango [valor predeterminado]
F17.00 Formato de datos 0 – 2 [0]
0: Formato 1-8-2, sin paridad, RTU El formato 1-8-2 indica que el formato de comunicación es: 1 bit inicio, 8 bits
datos, 2 bits fin.1: Formato 1-8-1, paridad par, RTU
El formato 1-8-1 indica que el formato de comunicación es: 1 bit inicio, 8 bits datos, 1 BIT fin.
2: Formato 1-8-1, paridad impar, RTU El formato 1-8-1 indica que el formato de comunicación es: 1 bit inicio, 8 bits
datos, 1 bit fin.
F17.01 Velocidad de baudio 0 – 5 [3]
0: 1200bps.1: 2400bps.2: 4800bps.
3: 9600bps.4: 19200bps.5: 38400bps.
F17.02 Dirección de la maquina 0 – 247 [2]
F17.02 = 0, se representa como una dirección de transmisión.
-45-

Parámetro Descripción del parámetro Rango [valor predeterminado]
F17.03 Tiempo de respuesta de la maquina 0 – 1000 [1ms]
F17.04 Tiempo de espera de la comunicación LAN 0.0 – 1000.0 [0.0]
Cuando el intervalo entre las dos repuestas a los datos locales sobrepasa de forma continua F17.04, se muestra el error (expiración de comunicación SCI) y el inversor continúa su funcionamiento. F17.04 = 0, no se detecta el tiempo de espera de comunicación.
F17.05 Tiempo de detección de error en la comunicación
0.0 – 1000.0 [0.0s]
Cuando ocurre un error de comunicación más que F17.05, se muestra fallo E0029 (error de comunicación SCI) y el inversor continúa su funcionamiento. F17.05 = 0, el inversor no detecta errores de comunicación.
F17.09 Parámetro de copia de comunicación EEPROM
00 – 11 [01]
Usado para seleccionar el parámetro de modificación de la comunicación, cuando estáguardado en el EEPROM.Unidades: excepto F00.13, el parámetro F19.03, opciones de almacenamiento EEPROM de comunicaciónDecenas: excepto F00.13, el parámetro F19.03, opciones de almacenamiento EEPROM de comunicación.0: No guardar1: GuardarNota:1: Cuando 10 se establece en 1 puede dañar al convertidor. ¡Cuidado!2: Solo usando los parámetros de comunicación, los códigos 0x06 o 0x10 son válidos. Ver Capítulo 9 MODBUS protocolo de comunicación, página 59.
F17.10 Tiempo de espera de la comunicación por red 0.0 – 10000.0 [0.0s]
El convertidor muestra E0028 (expiración de comunicación SCI) si el intervalo de respuesta entre dos datos correctos (locales o no) sobrepasa F17.10.
-46-

7.13 F18: Parámetros de control de la pantalla
Parámetro Descripción del parámetro Rango [valor predeterminado]
F18.02 Parámetro de la pantalla de funcionamiento 0 – 49 [8]
F18.08 Parámetro de la pantalla de apagado 0 – 49 [7]
Determina el contenido de la pantalla del teclado. Se pueden cambiar entre las pantallas de funcionamiento y apagado con el teclado.
0: Reservado1: Corriente indicado del convertidor3: Estado del convertidor Ver F00.10 para más
información.4: Canal de frecuencia principal5: Frecuencia principal7: Establecer frecuencia8: Frecuencia dada (tras aceleración y deceleración)9: Frecuencia de salida El indicador de Hz
parpadea durante el funcionamiento
10: Ajuste de velocidad
11: RPM El indicador de RPM
parpadea durante el funcionamiento
13: Tensión de salida14: Corriente de salida15: Referencia de par16: Par de salida17: Potencia de salida18: Tensión del bus CC19: Tensión de entrada del potenciómetro del teclado20: Tensión de entrada AI21: Tensión de entrada AI (tras procesamiento)28: Frecuencia del pulso deentrada del terminal DI4
29: Salida AO32: Temperatura del radiador33: Ajuste de velocidad de línea34: Velocidad dada de línea42: Estado del terminal de entrada Bit0 – Bit2 corresponden
a DI1 – DI4. Bit12 corresponde a AI44: Estado del terminal de salida Bit0 – Bit2 corresponden
a DO, RLY48: Tiempo acumulado de encendido49: Tiempo acumulado de funcionamiento
F18.14 Pantalla de ganancia de frecuencia 0.1 – 160.0 [1.0]
F18.15 Velocidad máxima de línea 0 – 65535 [1000]
F18.16 Precisión de la velocidad de línea 0 – 3 [0]
0: Entero1: Un decimal2: Dos decimales3: Tres decimalesNota: La velocidad de línea máxima se tiene que volver a ajustar después de cambiarla precisión de la pantalla.
F18.17 Modo del salvapantallas de LED 0, 1 [0]
0: Modo normal1: Cuando cambia la señal externa se cancela el salvapantallas Cambio de la señal externa: Se refiere a un cambio en el estado de funcionamiento
de la frecuencia indicada o de funcionamiento.
-47-

7.14 F19: Parámetros de mejora
Parámetro de control del ventilador (F19.07, F19.08)
Parámetro Descripción del parámetro Rango [valor predeterminado]
F19.07 Opciones de control del ventilador 0 – 2 [0]
F19.08 Tiempo de espera del ventilador 0.0 600.0 [30.0s]
F19.07 determina el modo de control del ventilador. Si hay protección de sobrecalentamiento, el ventilador sigue en funcionamiento.0: Parada automática
Cuando el convertidor está en funcionamiento y el tiempo de espera para apagar el ventilador alcanza el tiempo establecido en F19.08, si no se produce sobrecalentamiento, el ventilador se apaga.
1: Parada inmediata Cuando el convertidor está en funcionamiento el ventilador también lo está,
cuando se apaga el inversor el ventilador se apaga.2: Ventilador activado con la alimentación conectada
El ventilador está en funcionamiento cuando el convertidor tiene alimentación.Nota: Los parámetros de control del ventilador F19.07, F19.08 solo se aplican al modelo de 340V, en otros modelos el ventilador está en funcionamiento siempre al haber alimentación.
Parámetro de protección contra interrupciones eléctricas (F19.12, F19.15)
En el caso de la caída de tensión el convertidor activa la protección de subtensión reduciendo la frecuencia de salida mediante la carga de respuesta para evitar el apagado instantáneo.
Parámetro Descripción del parámetro Rango [valor predeterminado]
F19.12 Parámetro de protección contra interrupciones eléctricas
0, 1 [0]
Si se pierde momentáneamente latensión (tensión del circuito principalCC VDC < F19.15), el convertidormantiene la tensión del bus CCmediante la reducción de la frecuencia de salida para evitar que se apague.
0: Deshabilitado1: Habilitado
F19.13 Tiempo de deceleración 0.01 – 600.00 [5.00]
Si es demasiado largo la energía devuelta es demasiado poco y no se puede usar para la protección de subtensión.Si es demasiado corto la energía devuelta es demasiado y activará la protección de sobretensión.
F19.14 Tiempo de recuperación de la tensión 0.00 – 10.00 [0.10s]
F19.15 Momento de acción Convertidor 220V: 0 – 999 [248V]
Convertidor 380V: 0 – 999 [430V]
-48-

Parámetro de protección de sobretensión (F19.18, F19.19)
Parámetro Descripción del parámetro Rango [valor predeterminado]
F19.18 Protección de sobretensión 0, 1 [1]
0: Deshabilitado. En este estado se recomienda instalar la resistencia de frenado.1: Habilitado. Durante la deceleración del convertidor, la tensión del bus se compara con F19.19.- Si la tensión del bus sobrepasa F19.19 la frecuencia de salida dejará de bajar. Si la tensión del bus es menor a F19.19 el convertidor continúa la deceleración.Nota: Cuando la sobretensión se mantiene más de un minuto, el inversor produce el error de sobretensión (E0007) y apaga la salida.
F19.19 Punto de inicio de deceleración por sobretensión 0 – 999V [ Especificado segúntipo]
Parámetro del límite automático de corriente (F19.20 – F19.22)
Parámetro Descripción del parámetro Rango [valor predeterminado]
F19.20 Limite automático de corriente 0 – 2 [1]
0: Deshabilitado1: Habilitado aceleración y deceleración, no se aplica la velocidad constante2: Deceleración, se aplica la velocidad constante.
F19.21 Umbral del límite automático de corriente 20.0 – 200.0 [150.0%]
El umbral para la activación del límite de corriente se determina como el porcentaje relativo a la corriente indicada del aparato. Si el valor de F19.21 es demasiado bajo cuando el límite de corriente está activo,
puede afectar a la capacidad de sobrecarga del convertidor
F19.22 Tiempo de reducción del limite automático de corriente
0.00 – 600.00 [0.00s]
Determina la velocidad para el ajuste de la frecuencia de salida cuando se activa el proceso de límite de la corriente. Si el valor es demasiado alto, puede pasar demasiado tiempo en estado de límite de
corriente y provocar la sobrecarga. Si el valor es demasiado bajo, la frecuencia aumentará y puede provocar la
activación de la protección de sobretensión durante demasiado tiempo. F19.22 = 0, no se decelera con el limite de corriente.
-49-

Detección de terminales (F19.23)
Parámetro Descripción del parámetro Rango [valor predeterminado]
F19.23 Detección instantánea eléctrica de terminales 0, 1 [0]
0: Físico Adecuado para uso después de encender, con la ausencia de intervención humana
y no permite la operación automática para prevenir daños al equipo y proteger la seguridad personal.
Se debe activar cuando el inversor está encendido y la señal de funcionamiento enviada.
1: Eléctrico Adecuado para proteger el equipo y la seguridad personal para mejorar la
automatización y eficiencia del aparato. En este caso la transmisión arranca de inmediato si la señal se ha enviado al
terminal, independientemente de si se ha enviado la señal de funcionamiento antes o después del encendido.
Parámetro de frenado (F19.24)
Parámetro Descripción del parámetro Rango [valor predeterminado]
F19.24 Tensión de activación del frenado 630 – 750V [ Especificadosegún tipo]
Nota: Solo se aplica cuando el convertidor está en funcionamiento.
Rango de ajuste de frecuencia (F19.37)
Parámetro Descripción del parámetro Rango [valor predeterminado]
F19.37 Rango de ajuste de frecuencia 000 – 101 [100]
Unidades: El cálculo principal de frecuencia 0: 0 hasta máximo 1: Menos hasta máximoDecenas: Reservadas
Centenas: Síntesis del cálculo de frecuencia 0: 0 hasta máximo 1: Menos hasta máximo
-50-

Selección de tensión de entrada (F19.39)
Parámetro Descripción del parámetro Rango [valor predeterminado]
F19.39 Selección de la tensión de entrada 00 – 12 [00]
Unidades: Tensión de entrada para el modelo de 380V 0: 380 – 460V 1: 260 – 460V 2: 200 – 460VDecenas: Selección de tensión para el modelo de 220V 0: 200 – 240V 1: 140 – 240VNota: Para la entrada de baja tensión, el convertidor tiene que reducir el rendimiento para que la corriente de salida no sobrepase la indicada.
Iluminación de la pantalla LED
Parámetro Descripción del parámetro Rango [valor predeterminado]
F19.44 Tiempo de encendido de la pantalla LED 0.0 – 999.9 [5.0min]
Determina el tiempo de encendido de la pantalla LED del teclado cuando no está en funcionamiento.Normalmente a 0. Normalmente encendido si hay fallos. Si no hay fallo, pasado el tiempo F19.44 se apaga la pantalla LED. Al pulsar
cualquier botón se activa la iluminación de la pantalla sin ejecutar ninguna operación.
7.15 F20: Parámetro de protección contra fallos
Protección de sobrecarga
Parámetro Descripción del parámetro Rango [valor predeterminado]
F20.00 Protección de sobrecarga 00000 – 10000 [00000]
00000: Habilitado10000: Protegido
Fallo de fase de salida (F20.10, F20.11)
Parámetro Descripción del parámetro Rango [valor predeterminado]
F20.10 Valor de detección para fallos de fase de salida 0 – 50 [20%]
F20.11 Tiempo de detección para fallos de fase de salida
0.00 – 20.00 [3.00s]
F20.10 es el porcentaje de la corriente indicada.Cuando el convertidor detecta que la corriente de salida no ha alcanzado un valor específico de la fase (F20.10) y la duración es mayor que el tiempo de prueba (F20.11), el inversor producirá el error de fase de salida E0016. F20.10 = 0 o F20.11 = 0, el convertidor no detecta fallos de fase de salida.
-51-

Parámetro de auto recuperación y acción de relé de fallos (F20.18, F20.19)
Esta función permite la recuperación automática de fallos ocurridos durante el funcionamiento que se establece en tiempo (F20.18) e intervalo (F20.19). Durante el intervalo la salida se bloquea y después de la recuperación si está activado el comando de funcionamiento, el convertidor vuelve automáticamente a funcionar.
Los siguientes fallos no permiten la recuperación automática de fallos:
E0008: Fallo de la fuente de alimentaciónE0013: Amortiguador eléctrico del relé no aseguradoE0014: Fallo en el circuito de detección de corriente
E0021: Fallo en la lectura y escritura del EEPROME0024: Fallo externo
Parámetro Descripción del parámetro Rango [valor predeterminado]
F20.18 Valor de recuperación automática 0 – 100 [0]
Cuando está en 0, la recuperación automática está deshabilitada y se activa la protección contra fallos de forma inmediata.- Se restablece el contador de la recuperación automática si no se detecta ningún fallo dentro de 5 minutos.- Cuando se recupera de un fallo externo, el contador de la recuperación automáticase restablece.
F20.19 Intervalo de recuperación automática 2.0 20.0 [5.0s/veces]
Registros de fallos (F20.21 – F20.33)
Parámetro Descripción del parámetro Rango [valor predeterminado]
F20.21 Tipo del tercer (último) fallo [Real]
F20.22 Preajuste de frecuencia del último fallo
F20.23 Frecuencia de funcionamiento del último fallo
F20.24 Tensión del bus CC del último fallo
F20.25 Tensión de salida del último fallo
F20.26 Corriente de salida del último fallo
F20.29 Tiempo de intervalo del último fallo
F20.30 Tipo del segundo fallo
F20.31 Tiempo de ntervalo el segundo fallo
F20.32 Tipo del primer fallo
F20.33 Tiempo de intervalo del primer fallo
F20.22 – F20.29 registran los parámetros del estado del convertidor durante el último fallo.F20.30 – F20.33 registran el tipo de fallo de los últimos cuatro veces y los tiempos de intervalo de cada uno. La unidad de tiempo del intervalo es de 0.1 horas.
-52-

7.16 F23: Parámetro de control de PWM
Parámetro Descripción del parámetro Rango [valor predeterminado]
F23.00 Ajuste de la frecuencia portadora 1 – 16 [4kHz]
Determina la frecuencia portadora de la onda de salida PWM La frecuencia portadora afecta al ruido del funcionamiento del motor. Al ser mas
alta la frecuencia portadora, menos ruido. Se tiene que ajustar de forma adecuada. Si F20.00 > 4kHz, por cada 1kHz subido, el rendimiento se tiene que reducir 5%.
-53-

Capítulo 8 Resolución de problemas y mantenimiento
8.1 Resolución de problemas
El convertidor HD09 tiene funciones de protección y advertencia integradas. Si ocurre un fallo, el código del fallo se indicará en la pantalla del teclado. Al mismo tiempo, se activa el relé de fallos, lasalida del convertidor se apaga y el motor se detiene.
Cuando ocurre un fallo o se activa una alarma, guarda los datos del fallo y toma las acciones necesarias según la tabla de abajo. Si requiere asistencia técnica, contacta directamente con los distribuidores o EMESA S.L.
Tras arreglar un fallo, restablezca el convertidor con uno de los siguientes métodos:
1. Teclado. Pulsa el botón (estándar) 2. Terminal de reinicio externo (terminal DI establecido en en la función No. 46).3. Comunicación.4. Enchufando el convertidor después de apagarlo.
Fallo Causa del fallo Resolución
-Lu- Subtensión del bus CC Al principio del arranque y al final del apagado
Tensión de entrada demasiado baja
Cableado mal instalado, llevando a subtensión
Es normal durante el arranque y apagado
Comprueba la tensión de entrada
Comprueba el cableado e instala bien si es necesario
E0001 Sobrecorriente durante la aceleración
Conexión incorrecta entre motor y convertidor
Parámetros incorrectos delmotor
El rendimiento del convertidor es demasiado pequeño
Tiempo de aceleración / deceleración demasiado corto
Conectar de forma correcta el convertidor y el motor
Establezca los parámetros correctos para el motor (F08.00 – F08.04)
Elige un convertidor con mayor rendimiento
Establezca los tiempos de aceleración y deceleración correctos (F03.01 – F03.08)
E0002 Sobre corriente durante la deceleración
E0003 Sobrecorriente durante la velocidad constante
E0004 Sobretensión en el bus CC durante la aceleración
Tensión de entrada demasiado alta
Tiempo de deceleración demasiado corto
Cableado mal instalado Selección incorrecta de
los aparatos de frenado
Comprueba la fuente de alimentación
Establezca el valor correcto para el tiempo de deceleración(F03.02, F03.04, F03.06, F03.08)
Comprueba el cableado e instalalo bien si es necesario
Seleccionar según lo aparatos de frenados adecuados en el apartado 5.2 Resistencias de frenado, página 21
E0005 Sobretensión en el bus CC durante la deceleración
E0006 Sobretensión en el bus durante velocidad constante
-54-

Fallo Causa del fallo Resolución
E0007 Sobretensión La tensión del bus es demasiado alta
El valor de protección de sobretensión es demasiado bajo
Comprueba la fuente de alimentación o el funcionamiento del freno
Ajusta correctamente el valor de la protección de sobretensión (F19.19)
E0008 Fallo en el módulo de potencia
Cortocircuito entre fases de salida
Cortocircuito con la tierra La corriente de salida es
demasiado alta El módulo de potencia está
dañado
Comprueba la conexión y conecta correctamente los cables
Comprueba la conexión y conecta correctamente los cables
Comprueba la conexión y el mecanismo
Contacta con el distribuidor
E0009 Sobrecalentamiento del disipadortérmico
Temperatura ambiente elevada
La ventilación al exterior del convertidor no es correcta
Fallo del ventilador Fallo en el sensor de
temperatura
Usa un inversor con más capacidadde potencia
Mejora la ventilación alrededor delinversor
Cambia el ventilador Pida asistencia técnica
E0011 Fallo del CPU Anomalía en el CPU Comprueba al enchufar después deun corte de luz
Pida asistencia técnica
E0012 Fallo del auto ajuste de los parámetros
Se ha pasado el tiempo de espera en el autoajuste de los parámetros
Comprueba la conexión del motor Establezca los parámetros
correctos para el motor (F08.01 – F08.04)
Pida asistencia técnica
E0013 Contactor no activado
Fallo en el contactor Fallo del circuito de control
Cambia el contactor Pida asistencia técnica
E0014 Fallo del circuito de detección de corriente
El circuito de detección de corriente está dañado
Contacta con el distribuidor para lareparación
E0016 Fallo en la fase de salida
Desconexión o pérdida de la fase de salida
Desequilibrio de la carga trifásica del inversor
Comprueba la conexión entre el inversor y el motor
Comprueba la calidad del motor
E0017 Sobrecarga del inversor
El tiempo de aceleración es demasiado corto
Ajuste incorrecto de la curva V/f o refuerzo de par
La carga del motor es demasiado alta
Establezca correctamente el tiempode aceleración (F03.01, F03.03, F03.05, F03.07)
Establezca correctamente la curva V/f (F09.01 – F09.06) o la refuerzade par (F09.07, F09.08)
-55-

Fallo Causa del fallo Resolución
Comprueba la tensión de la red de suministro
Usar un inversor con la potencia indicada adecuada
E0019 Sobrecarga del motor
Ajuste incorrecto de la curva V/f
La tensión del suministro eléctrico es demasiado baja
El motor está en funcionamiento durante mucho tiempo con mucha carga a poca velocidad
El motor funciona con el par atascado o la carga muy alta
Establecer correctamente la curva V/f (F09.01 – F09.06)
Comprobar la potencia de entrada Usar un motor especial Comprobar la carga y la
transmisión mecánica
E0021 Fallo de accesoal EEPROM
Fallo en el circuito de memoria del EEPROM
Contactar con el distribuidor para la reparación
E0024 Fallo en aparato externo
El terminal del aparato externo funciona
Comprobar el aparato externo
E0028 Tiempo de espera excedida de la comunicación SCI
Fallo de conexión en el cable de comunicación
Cable desconectado o conectado de forma incorrecta
Comprobar la conexión
E0029 Error de comunicación SCI
Fallo de conexión en el cable de comunicación
Cable desconectado o conectado de forma incorrecta
Error en el ajuste de comunicación
Error en los datos de comunicación
Comprobar la conexión Comprobar la conexión Establecer correctamente el
formato de conexión (17.00) y la velocidad de blaudio
Nota:
Para E0028 y E0029 no es necesario apagar el convertidor.
-56-

8.2 Mantenimiento
¡Peligro!
El mantenimiento tiene que estar realizado por profesionales acreditados y autorizados.
Antes de cualquier obra de inspección o mantenimiento, se tiene que desconectar por completo la alimentación del convertidor. Ver comprobación de la desconexión de la fuente de alimentación, página 11.
¡Cuidado!
Para un convertidor almacenado durante más de 2 años, se debe usar un regulador para ayudar a la fuente de alimentación.
Es importante no dejar objetos metálicos como cables, herramientas, tornillos, etc. dentro de la maquina.
Es importante no modificar piezas internas del inversor. No tocar el aparato IC dentro del convertidor por riesgo de descargas
estáticas.
Mantenimiento diario
El convertidor HD09 se tiene que usar en un ambiente específico, ver apartado 3.2 Requisitos para el lugar de instalación, página 8.
Los usuarios deben seguir la siguiente tabla durante el mantenimiento rutinario para detectar a tiempo las anomalías con el fin de alargar la vida del convertidor.
Artículos Contenido Requisitos
Ambiente de funcionamiento
Temperatura y humedad -10 - +40ºC, reducción de rendimiento de 40 a 50ºCHumedad relativa menor a 95%, sin condensación
Polvo y goteras Sin acumulación de polvo conductivo, sin goteras
Gas Sin olor raro
HD09 Vibración y calentamiento Oscilación estable y temperatura adecuada
Ruido Sin ruidos extraños
Motor Calentamiento Sin sobrecalentamiento
Ruido Ruido bajo y normal
Parámetros de estado de funcionamiento
Corriente de salida Dentro del rango indicado
Tensión de salida Dentro del rango indicado
-57-

Mantenimiento periódico
Según el ambiente, el usuario puede realizar una inspección cada 3-6 meses de forma regular para eliminar peligros contra el funcionamiento estable y de alto rendimiento a largo plazo.
Comprobar lo siguiente:
Asegurarse que los tornillos de los terminales de control están correctamente apretados y apretarlos si no lo están;
Hay contacto fuerte entre los terminales de potencia sin señales de sobrecalentamiento en puntos de contacto de cobre o cables;
No hay daños en los cables de alimentación y de control especialmente en superficies en contacto con metal;
No están rotos los conectores de los cables de alimentación y control, y no se han quedado sin la cinta aislante;
Limpiar el polvo en la placa de circuitos y el conducto, usando al ser posible una aspiradora.
Nota:
1. Si el convertidor ha aprobado la prueba de presión, el usuario no debe realizar una ya que una prueba incorrecta puede causar daños.
2. Cuando se comprueba el aislamiento del motor, se debe desconectar el terminal U / V / W del convertidor y comprobar el motor por separado. En caso contrario se pueden producir daños alconvertidor.
3. Durante el almacenamiento de largo plazo del convertidor se debe realizar una prueba de funcionamiento cada 2 años. Se debe usar un regulador para aumentar lentamente la tensión deentrada hasta el valor indicado durante por lo menos 5 horas.
-58-

Capítulo 9: MODBUS Protocolo de Comunicación
9.1 Introducción
HD09 viene con un terminal RJ45 y utiliza un sistema MODBUS estándar como protocolo de comunicación.
9.1.1. Terminal RJ45
Para ver la posición y definición del terminal RJ45, ver sección 4.4 Teclado Exterior o Ordenador Superior, página 19. El modo de transmisión se muestra en la siguiente tabla.
Interfaz Asincronizada, medio dúplex
Formato 1-8-2 (1-bit start bit, 8 –bit data bit, 2-bit stop bit)
Ratio Baude 96000bps
Otros ajustes Ver: F17: SCI Parámetros de comunicación, página 45.
9.1.2 Modo red
-59-

9.1.3. Protocolo de formato MODBUS
El protocolo MODBUS tan sólo es compatible con el modo RTU. El formato y estructura correspondientes se muestran a continuación:
MODBUS utiliza el sistema “Big Endian”, es decir primero el byte alto y luego el byte bajo.
La primera y últimas estructuras se definen por el tiempo desocupado del bus o canal siempre que no sea menor de 3.5 bytes.
Cuando la dirección esclava se pone a 0, indica la dirección desde la que se transmite. Chequea los datos usando CRC.16, toda la información involucrada en la verificación.
9.2 Relación de calibración del valor de transferencia correspondiente
Por favor refiérase a “unidad min.” (“min. unit”) de la lista de parámetros para determinar la relación de calibración de los parámetros de la función. Vea la lista de los últimos parámetros de funciones de este manual.
Nota:
1. F16.05, los datos de comunicación F16.22 0-2000 corresponden a los datos -1000 - + 1000.2. En estatus de grupos de parámetros, procesar retroalimentación PID (0x332D), error PID de
proceso (0x332E), PID integral de proceso (0x32F) y la salida PID de proceso (0x3330) los datos de comunicación 0-2000 corresponden a -1000 - + 1000 .
9.3 Funciones del protocolo
9.3.1. Funciones de apoyo
El protocolo MODBUS admite las siguientes funciones:
Funciones de apoyo Código Instrucciones
Lea los parámetros de función o los parámetros deestatus del transmisión
0x03
Re-escriba el inversor con un único parámetro de función o parámetro de control
0x06 El apagado se guarda con F17.09
Lea los parámetros de función o los parámetros deestatus del transmisión
0x10 El apagado se guarda con F17.09
-60-

9.3.2 Vea los parámetros de la función del inversor o los parámetros de estado
Código de función 0x03, marco de solicitud y marco de respuesta ver tabla a continuación.
Trama de solicitud
Añadir Código de función
Dirección inicial del registro
Número de registros
Check CRC
Número bytes de la trama de datos
1 1 2 2 2
Valor o rango 0 – 247 0x03 0x0000 - 0xFFFF 0x0001 - 0x000C
Trama de respuesta
Añadir Código de función
Número de bytes de respuesta
Número de registros
Check CRC
Número bytes de la trama de datos
1 1 12* Número de registros
2
Valor o rango 0 – 247 0x03 2* Número de registros
9.3.3 Programar parámetros de función o parámetros de control del convertidor
Código de instalación 0x06 (el apagado está configurado por F17.09), marco de solicitud y marco de respuesta, ver tabla a continuación.
Trama de solicitud
Añadir Código de función
Dirección del registro
Contenido de los registros
Check CRC
Número bytes de la trama de datos
1 1 2 2 2
Valor o rango 0 – 247 0x06 0x0000 - 0xFFFF 0x0001 - 0xFFFF
Trama de respuesta
Añadir Código de función
Dirección del registro
Contenido de los registros
Check CRC
Número bytes de la trama de datos
1 1 1 2 2
Valor o rango 0 – 247 0x06 0x0000 - 0xFFFF 0x0001 - 0xFFFF
-61-

9.3.4 Programar múltiples parámetros funcionales o parámetros de control del convertidor
Código de función 0x10 (el conjunto de alimentación se guarda con el ajuste F17.09), marco de solicitud y marco de respuesta, ver tabla a continuación.
Trama de solicitud
Añadir Código de función
Dirección inicial del registro
Número de registros de operación
Bytes del contenido delregistro
Contenidodel registro
Check CRC
Número bytes de la trama de datos
1 1 2 2 1
2* Númerode registros de operación
2
Valor o rango
0 – 247 0x10 0x0000 - 0xFFFF
0x0001 - 0x0004
2* Número deregistros de operación
Trama de respuesta
Añadir Código de función
Dirección inicial del registro
Número de registros
Check CRC
Número bytes de la trama de datos
1 1 2 2 2
Valor o rango 0 – 247 0x10 0x0000 - 0xFFFF 0x0001 - 0x0004
La solicitud reescribe los contenidos de la unidad de datos contigua comenzando desde la dirección de registro de inicio.Registre la asignación de direcciones para los parámetros de la función del inversor y los parámetros de control, consulte la sección 9.4 Relación de asignación de direcciones, página 63.
9.3.5 Código de error y excepción
Si la solicitud de operación cae, la respuesta es un código de error, el código de error es el código defunción + 0x80. El código de excepción se muestra en la tabla a continuación.
Código de excepción
Instrucciones
0x01 Funciones de parámetro ilegales.
0x02 Dirección de registro ilegal.
0x03 Fallo de datos. Los datos se han excedido el límite por encima o debajo.
0x04 La operación esclava falla (incluye fallos ocasionados por datos inválidos).
0x16Operación no posible (imposible leer los atributos, defectos de fábrica y excesos por encima o debajo del límite de los parámetros de control o parámetros de estado.
0x17 Fallo en el número de registro de la trama de control.
0x18 Estructura de información incorrecta, incluye fallos en la extensión y en el check.
0x20 Los parámetros no se pueden modificar.
-62-

Código de excepción
Instrucciones
0x21Los parámetros no se pueden cambiar cuando el controlador está en modo funcionamiento.
0x22 Los parámetros están protegidos con contraseña.
Por ejemplo, escribir la selección del canal de ajuste de la frecuencia del esclavo 2 F00.10 (rango 0x00-0x04), el contenido del registro escriba 0x08 se sobrepasa. El código de error es 0x86 (0x06 +0x80) y el código de excepción debe ser 0x03.
Dirección CódigoDirección de registro
Registro de contenidos
Suma de comprobación
Trama de solicitud
0x02 0x06 0x00 0x0A 0x00 0x08 0xa8 0x3D
Dirección Código de error Código de excepción Suma de comprobación
Trama de respuesta
0x02 0x86 0x03 0xF2 0x61
9.4 Relación de mapeo de direcciones
Los parámetros de función, los parámetros de control y los parámetros de estado del HD09 se pueden asignar a los registros de lectura y escritura MODBUS.
9.4.1 Mapeo de dirección de parámetros de función
El número de grupo del parámetro de función HD09 se asigna al byte alto de la dirección de registro. La relación de correspondencia se muestra en la siguiente tabla. El índice intra-grupo está asignado al byte inferior de la dirección de registro. El índice del parámetro de función F00-f23 se refiere al manual del usuario.
Byte alto de dirección de registro
Número de grupo
Byte alto de dirección de registro
Número de grupo
Byte alto de dirección de registro
Número de grupo
0x00 F00 0x06 F06 0x12 F18
0x01 F01 0x08 F08 0x13 F19
0x02 F02 0x09 F09 0x14 F20
0x03 F03 0x0f F15 0x17 F23
0x04 F04 0x10 F16
0x05 F05 0x11 F17
Por ejemplo, la dirección de registro del parámetro de función F03.02 es 0x0302 y la dirección de registro del parámetro de función F16.01 es 0x1001.
-63-

9.4.2 Asignación de dirección de parámetros de control (0x32)
Parámetros de control del convertidor para completar el inicio, la parada, la frecuencia de operación y otras funciones del convertidor, recuperando los parámetros de estado del convertidor para obtener la frecuencia de funcionamiento del convertidor, la corriente de salida y otros parámetros.El número de grupo de control (0x32) se asigna al byte alto de la dirección de registro, y el índice en el grupo es el siguiente.
Dirección de registro Parámetro¿Se guarda cuando está apagado?
0x3200 Orden de control No
0x3201 Ajuste de frecuencia No
0x3204Ajustes de control de las terminales analógicas
No
Orden de control (0x3200) definición de bytes
Los contenidos del registro se pueden definir como comandos de control, ver tabla a continuación.
Contenido del registro Orden de control Dirección de registroNombre del parámetro
0x1001 Orden hacia adelante 0x1020Apagado por fallo externo
0x1003 Orden hacia atrás 0x1040Rebobinado hacia adelante
0x1004Deceleracion. Falta de tiempo
0x1080 Rebobinado hacia atrás
0x1010 Parada libre 0x1100Restablecimiento de fallos
Configuración de control de terminal virtual (0x3204) definición de bit de palabra.
Palabra de control Valor y significado
Bit1 1: DO es válido 0: DO es inválido
Bit 2 1: RLY es válido 0: RLY es inválido
-64-

9.4.3. Mapeo de dirección del parámetro de estado (0x33)
El número de grupo (0x33) del parámetro de estado se asigna al byte alto de la dirección de registro.El índice del grupo se muestra en la siguiente tabla:
Dirección Parámetro Dirección Parámetro
0x3300 Series del convertidor 0x331ATensión de entrada del potenciómetro del teclado M
0x3301 Versión software del teclado U1 0x331B Tensión de entrada AI
0x3302 Versión software del teclado I1 0x331CAI Voltaje de entrada (después del procesamiento)
0x3303Versión software del teclado U1 no estándar
0x3323Frecuencia de entrada de pulso de terminal DI4
0x3304Versión software del teclado I1 no estándar
0x3324 Salida AO
0x3305Versión software del panel de operaciones
0x3326Frecuencia de pulso de salida de alta velocidad
0x3306 Número de serie personalizado 0x3327 Temperatura del radiador
0x3308 Corriente nominal del convertidor 0x332C Proceso de PID dado
0x330A Corriente nominal del inversor 0x332D Procesar retroalimentación PID
0x331BCanal de frecuencia de referencia principal
0x332E Procesar el error PID
0x331C Frecuencia principal establecida 0x332F Procesar el término integral de PID
0x331D Frecuencia de conjunto auxiliar 0x3330 Procesar salida PID
0x331E Frecuencia establecida 0x3331 Valor de conteo externo
0x331FFrecuencia dada (después de acc / decc)
0x3332 Estado del terminal de entrada
0x3310 Frecuencia de salida 0x3333 Estado del terminal de salida
9.5 Instrucciones especiales
. 1 La máquina host puede leer pero no puede cambiar los parámetros del convertidor: grupo F08 (motor asíncrono), grupo F17 (comunicación SCI), mantenga los parámetros.. 2 La comunicación de la máquina host no puede cambiar F01.00 (contraseña del usuario), pero puede escribir F01.00 verificar la contraseña del usuario, la máquina host obtiene los parámetros de función del inversor, después del cambio, al escribir inválida la contraseña a F01 .00 y hacer que la máquina host no tenga permiso para cambiar los parámetros de función del convertidor. 3 Diversas configuraciones de función de terminal de entrada multifunción conducirán a la misma función. Usa el protocolo MODBUS para modificar la función de terminal multifunción para evitar esta situación.
-65-

9.6 Ejemplos de aplicación
Cuando se usa la comunicación para controlar el convertidor, asegurarse de que la conexión de hardware sea correcta. Al mismo tiempo, configurar correctamente el formato de datos de comunicación, la velocidad en baudios y la dirección de comunicación del convertidor.
1. La configuración de frecuencia del esclavo 2 debe cambiarse en la configuración de comunicación.
Trama de solicitud
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x00 0x0A 0x00 0x02 0x28 0x3A
Trama de respuesta
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x00 0x0A 0x00 0x02 0x28 0x3A
2. Write slave 2 establece la frecuencia de operación, el ahorro de energía (como: establece la frecuencia de operación de 45.00Hz), registra los contenidos 0x11,0x94
Trama de solicitud
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x01 0x11 0x94 0xDB 0x7E
Trama de respuesta
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x01 0x11 0x94 0xDB 0x7E
3. El comando chanel (F00.11) cambia a la comunicación
Trama de solicitud
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x00 0x0B 0x00 0x02 0x79 0xFA
Trama de respuesta
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x00 0x0B 0x00 0x02 0x79 0xFA
4. El avance del esclavo 2
Trama de solicitud
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x10 0x01 0x4B 0x41
Trama de respuesta
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x10 0x01 0x4B 0x41
-66-

5. Reserva de ejecución del esclavo 2
Trama de solicitud
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x10 0x03 0xCA 0x80
Trama de respuesta
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x10 0x03 0xCA 0x80
6. Esclavo 2 Control de deceleración del apagado
Trama de solicitud
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x10 0x04 0x8B 0x42
Trama de respuesta
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x10 0x04 0x8B 0x42
7. Esclavo 2 restablecimiento de fallos
Trama de solicitud
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x11 0x00 0x8B 0x11
Trama de respuesta
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x11 0x00 0x8B 0x11
8. Lea desde la corriente de salida del inversor esclavo 2 (por ejemplo: corriente de salida del inversor de 12.5A), registre contenidos 0x00,0x7D
Trama de solicitud
Dirección Código Dirección de registro
Bytes de lectura
Suma de comprobación
0x02 0x03 0x33 0x15 0x00 0x01 0x9A 0xB9
Trama de respuesta
Dirección Código Bytes de respuesta
Contenido de registro
Suma de comprobación
0x02 0x03 0x02 0x00 0x7D 0x3C 0x65
-67-

9. Leer la frecuencia de salida del esclavo 2 (por ejemplo: frecuencia de salida del convertidor de 50.00 Hz), registre contenidos 0x13,0x88
Trama de solicitud
Dirección Código Dirección de registro
Bytes de lectura
Suma de comprobación
0x02 0x03 0x33 0x10 0x00 0x01 0x64 0x38
Trama de respuesta
Dirección Código Bytes de respuesta
Contenido de registro
Suma de comprobación
0x02 0x03 0x02 0x13 0x88 0xF1 0x12
10. Leer el tensión del bus esclavo 2 (parámetro de estado), la respuesta debe ser 537V
Trama de solicitud
Dirección Código Dirección de registro
Bytes de lectura
Suma de comprobación
0x02 0x03 0x33 0x19 0x00 0x01 0x5A 0xBA
Trama de respuesta
Dirección Código Bytes de respuesta
Contenido de registro
Suma de comprobación
0x02 0x03 0x02 0x02 0x19 0x3C 0xEE
11. La frecuencia de ajuste del esclavo 2 (F00.13) es 45.00Hz, y la potencia se guarda
Trama de solicitud
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x00 0x0D 0x11 0x94 0x15 0xC5
Trama de respuesta
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x00 0x0D 0x11 0x94 0x15 0xC5
12. Esclavo 2 comando de parada libre (F00.1 = 2)
Trama de solicitud
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x10 0x10 0x8B 0x4D
Trama de respuesta
Dirección Código Dirección de registro
Contenido de registro
Suma de comprobación
0x02 0x06 0x32 0x00 0x10 0x10 0x8B 0x4D
-68-

Capítulo 10: Parámetros
Los atributos cambian:
"X": indica que el ajuste de este parámetro no puede modificarse cuando el convertidor está enestado de funcionamiento."O": indica que la configuración de este parámetro se puede modificar cuando el convertidor está enestado de funcionamiento."*": Indica que el valor de este parámetro es el valor real que no se puede modificar.
Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F00: Parámetro básico
F00.06Frecuencia de salida máxima
50.0 – 1000.0Hz 50.0 Hz 0.1 Hz x
F00.08Frecuencia máxima de funcionamiento
0.0 – F00.06 50.0 Hz 0.1 Hz x
F00.09Frecuencia mínima de funcionamiento
0.0 – F00.08 0.0 Hz 0.1 Hz x
F00.10
Selección de acceso a los ajustes de frecuencia
0: configuración digital del teclado1: configuración digital del terminal2: ajustes de comunicación SCI3: ajustes analógicos4: ajustes de impulso del terminal
0 1 x
F00.11
Selección de acceso al comando de operación
0: configuración digital del teclado1: configuración digital del terminal2: ajustes de comunicación SCI
0 1 x
F00.13
Configuración digital de frecuencia de operación original
0.0 – F00.08 50.0 Hz 0.1 Hz O
-69-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F00.14Control de configuración de frecuencia
Unidades: Guardar frecuencia cuando se apaga0: No1: Guardar
Decenas: Frecuencia establecida al detenerse0: Mantener la frecuencia establecida al detener1: Recuperar a F00.13 al detener
Centenas: Guardar frecuencia al comunicarse0: No1: Guardar
Millares: Guardar frecuenciacuando cambie la frecuenciade acceso0: No1: Guardar
1001 1 x
F00.15Ajuste digital de la frecuencia de operación lenta
0.0Hz - F00.08 5.0 Hz 0.1 Hz O
F00.17Selección de dirección de ejecución
0: Misma dirección 1: Dirección contraria
0 1 x
F00.19
Tiempo muerto entre rotación positiva y negativa
0.0 - 3600.0s 0.0s 0.1s x
F00.20Habilitar el teclado externo
Unidades: habilita teclas0: Habilita1: Invalida
Decenas: habilita el potenciómetro0: Precede al potenciómetro del teclado externo 1: Potenciómetro del tecladode serie2: Potenciómetro del tecladoexterno
00 1 O
-70-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F00.21Habilitar funciónde hibernación
0: Prohibido. Esta función es inválida1: Habilitar 12: Habilitar 2
0 1 x
F00.22Tiempo de reinicio desde hibernación
0.0 - 360.0s 0.0s 0.1s x
F00.24Retraso de hibernación
0.0 - 3600.0s 0.0s 0.1s x
F00.25Frecuencia de hibernación
0.0Hz - F00.08 0.5Hz 0.1Hz O
F01: Parámetro de protección de función
F01.00Contraseña de usuario
0000 - 65535 00000 1 O
F01.01Selección del modo menú
0: Modo de menú estándar 1: Modo de menú de verificación
0 1 O
F01.02
Inicialización de parámetro de código de función (descarga de parámetro)
0: Sin acción 1: Restaura parámetros de fábrica2/3: Copa el parámetro de almacenamiento 1/2 del teclado a la placa del controlador para actualizar el valor del código de la función actual4: Borra el registro de errores
0 1 x
F01.03Subir parámetro al teclado
0: Sin acción. El convertidorestá en estado normal de lectura1/2: el valor del código de función actual se copia al parámetro de almacenamiento del teclado 1/2
0 1 O
F02: Parámetro de control de parada y arrancada
F02.02Ajuste de frecuencia de inicio DWELL
0.0Hz - F00.08 0.00Hz 0.1Hz x
-71-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F02.03
Tiempo de mantenimiento de frecuencia de inicio DWELL
0.00 - 10.00s (corriente indicada del convertidor)
0.00s 0.01s x
F02.04Configuración actual de frenadoCC
0 - 100% 50% 1% x
F02.05Tiempo de comienzo de frenado CC
0.00 - 60.00s 0.00s 0.01s x
F02.13Selección del modo de parada
1: Parada libre2: Parar con Deceleración
2 1 x
F02.14Frecuencia DWELL durante el frenado CC
0.0Hz - F00.08 0.0Hz 0.1Hz x
F02.15
Frecuencia DWELL al detener el frenado CC
0.00 - 10.00s 0.00s 0.01s x
F02.16
Frecuencia de arranque para detener el frenado CC
0.0 - 50.0Hz 0.5Hz 0.1Hz x
F02.18Parada del tiempo de frenado CC
0.00 - 60.00s 0.00s 0.01s x
F03: Parámetro de aceleración y deceleración
F03.01 Tiempo acc.1 0.01 - 600.00s 10.00s 0.01s O
F03.02 Tiempo dec.1 0.01 - 600.00s 10.00s 0.01s O
F03.03 Tiempo acc.2 0.01 - 600.00s 10.00s 0.01s O
F03.04 Tiempo dec.2 0.01 - 600.00s 10.00s 0.01s O
F03.05 Tiempo acc.3 0.01 - 600.00s 10.00s 0.01s O
F03.06 Tiempo dec.3 0.01 - 600.00s 10.00s 0.01s O
F03.07 Tiempo acc.4 0.01 - 600.00s 10.00s 0.01s O
F03.08 Tiempo dec.4 0.01 - 600.00s 10.00s 0.01s O
F03.09Cambio de frecuencia de tiempo acc. 2 y 1
0.0Hz - F00.08 0.0s 0.0Hz x
-72-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F03.10Cambio de frecuencia de tiempo dec. 2/1
0.0Hz - F00.08 0.0s 0.0Hz x
F03.15Tiempo de inactividad acc.
0.01 - 600.00s 6.00s 0.01s O
F03.16Tiempo de inactividad dec.
0.01 - 600.00s 6.00s 0.01s O
F04: Parámetro de control de procesos PID
F04.00Función de selección del proceso PID
0: Control PID inválido 1: Control PID válido
0 1 x
F04.02
Selección de acceso de retroalimentac-ión
0: Retroalimentación analógica1: Retroalimentación de impulso terminal
0 1 x
F04.03Parámetros dados para los ajustes digitales
0.0 - 100.0% 0.0% 0.1% O
F04.04Ganancia proporcional
0.00 - 10.00 2.00 0.01 O
F04.05Tiempo integral (I)
0.01 - 10.00s 1.00s 0.01s O
F04.07Tiempo derivado(D)
0.00 - 10.00s 0.00s 0.01s O
F04.08Valores diferenciales límites
0.0Hz - F00.08 20.0Hz 0.1Hz O
F04.09Periodo de muestra (T)
0.01 - 50.00s 0.01s 0.01s O
F04.10 Límite de desvío 0.0 - 20.0% 2.0% 0.1% O
F04.16
Ajuste de selección de elementos integrales
0: Alcanza el límite superior e inferior del ítem integral y los puntos de detención 1: Alcanza el límite superior e inferior del ítem integral y continúa los puntos
0 1 x
F04.17Tiempo de filtro de salida PID
0.01 - 10.00s 0.05s 0.01s O
-73-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F04.18Opción inversa desalida PID
0: La inversión de ajuste PID está prohibida1: La salida PID puede revertirse
0 1 x
F04.19
Límite de frecuencia de inversión de salida PID
0.0Hz - F00.08 50.0Hz 0.1Hz x
F05: Parámetros dados de curva dada externa
F05.01 Línea min. dado 0.0% - F05.03 0.0% 0.1% O
F05.02Línea min. dada correspondiente
0.0 - 100.0% 0.0% 0.1% O
F05.03Línea máx. dada correspondiente
F05.01 - 100.0% 100.0% 0.1% O
F05.04Línea máx. dada correspondiente
0.0 - 100.0% 100.0% 0.1% O
F05.17Frecuencia de salto
F00.09 - F00.08 0.0Hz 0.1Hz x
F05.20Rango de frecuencia de salto
0.0 - 30.0Hz 0.0Hz 0.1Hz x
F06: Función de velocidad multietapa
F06.00Instrucciones de frecuencia múltiple 1
F00.09 - F00.08 5.0Hz 0.1Hz O
F06.01Instrucciones de frecuencia múltiple 2
F00.09 - F00.08 5.0Hz 0.1Hz O
F06.02Instrucciones de frecuencia múltiple 3
F00.09 - F00.08 5.0Hz 0.1Hz O
F06.03Instrucciones de frecuencia múltiple 4
F00.09 - F00.08 5.0Hz 0.1Hz O
F06.04Instrucciones de frecuencia múltiple 5
F00.09 - F00.08 5.0Hz 0.1Hz O
F06.05Instrucciones de frecuencia múltiple 6
F00.09 - F00.08 5.0Hz 0.1Hz O
-74-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F06.06Instrucciones de frecuencia múltiple 7
F00.09-F00.08 5.0Hz 0.1Hz O
F08: Parámetros de motor
F08.00Potencia indicadadel motor
0.2 - 5.5kW
Según tipo
0.1kW x
F08.01Tensión indicada del motor
0v – Tensión indicada del convertidor
1V x
F08.02Corriente indicada del motor
0.01 - 99.99A 0.01A x
F08.03Frecuencia indicada del motor
1 - 1000 Hz 50Hz 1Hz x
F08.04Rpm indicadas del motor
1 - 24000 rpmSegún tipo
1rpm x
F08.06Autoajuste de parámetros del motor
0: Sin acción 1: Autoajuste de motor estático
0 1 x
F08.07Resistencia del estator del motor
0.00 - 99.99ΩSegún tipo
0.01Ω x
F09: Parámetros de control V/f
F09.01Valores de frecuencia del motor V/f F3
F09.03 - 100.0% (F08.03) 100.0% 0.1% x
F09.02Valores de tensión del motorV3
F09.04 - 100.0% (F08.01) 100.0% 0.1% x
F09.03Valores de frecuencia del motor V/f F2
F09.05 - F09.01 (F08.03) 0.0% 0.1% x
F09.04Valores de tensión del motorV2
F09.06 - F09.02 (F08.01) 0.0% 0.1% x
F09.05Valores de frecuencia del motor V/f F1
0.0% - F09.03 (F08.03) 0.0% 0.1% x
F09.06Valores de tensión del motorV1
0.0% - F09.04 (F08.01) 0.0% 0.1% x
-75-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F09.07El torque del motor aumenta
0.0 - 30.0% 2.0% 0.1% x
F09.08
Aumentar manualmente los puntos de corte del torque del motor
0.0 - 50.0% (F08.03) 30.0% 0.1% O
F09.09Ganancia de compensación de deslizamiento
0.0 - 300.0% 0.0% 0.1% O
F09.10
Tiempo de filtrado de compensación de deslizamiento delmotor
0.01 - 10.00s 0.01s 0.01s O
F09.11Límite de compensación de deslizamiento
0.0 - 250.0% 200.0% 0.1% x
F09.12Motor para compensar el tiempo normal
0.1 - 25.0s 2.0s 0.1s O
F09.14
Función AVR (regulador de tensión automático)
0: Sin acción1: Acción constante2: Sólo dec. y sin acción
1 1 O
F09.15
Modo de inhibición de la oscilación del motor
0: Inhibe modo de oscilación 11: Inhibe modo de oscilación 2
0 1 O
F09.16
Factor de inhibición de la oscilación del motor
0 - 200 50 1 O
-76-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F15: Parámetros de entrada y salida digitales de los terminales
F15.00 Función DI1
0: Reservado 1: Inversor habilitado 2,3: FWD/REV habilitados8: Frecuencia cambiada a la simulación 11: Terminales de conmutación de comando 13 - 15: Terminales de frecuencia multietapa 1-3 17,18: Instrucciones de aumento (UP) / frecuencia decreciente (DN) 19: Restablecimiento de frecuencia de ajuste auxiliar20,21: Entrada de control decomando de movimiento de punto FWD / REV (JOGF / JOGF) 26,27: Acc / Decc. tiempo elegir terminales 1,2 41,42: Liberar abajo entradanormalmente abierta / cerrada 44,45: Fallo de entrada externa normalmente abierta/ cerrada 46: Entrada de reinicio externo 50: Entrada de señal de restablecimiento del contador 51: Entrada de señal del disparador 53: Salida de frecuencia de pulso (D4) ADI es válido cuando F16.01 está como en20
2 1 x
F15.01 Función DI2 3 1 x
F15.02 Función DI3 0 1 x
F15.03 Función DI4 0 1 x
F15.44Selección de terminal AI (función ADI)
0 1 x
F15.12
Terminal ARRIBA / ABAJO de la tasaAcc. y dic.
0.0 - 99.9Hz/s 1.0Hz/s 0.1Hz/s x
-77-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F15.14Número de filtro de detección de terminal
0 - 1000 2 1 O
F15.15
Configuración deentrada de terminal positiva y negativa
Bit0-Bit3 corresponde a DI1-DI4 Bit 12 corresponde a AI Bit x: terminal seca de entrada lógica positiva y negativa 0: Lógica positiva 1: Lógica negativa
0 1 O
F15.16Ajuste del modo de operación FWD / REV
0: Modo de operación de dos cables 1 1: Modo de operación de dos cables 2 2: Modo de operación de tres cables 1 3: Modo de operación de tres cables 2
0 1 x
F15.19 Función DO
0: Reservado 2: El convertidor está funcionando (RUN) 3: El convertidor está funcionando hacia adelante 4: El convertidor está funcionando hacia atrás 5: Freno DC 9: Señal de detección del nivel de frecuencia (FDT) 11: Llegada de frecuencia (FAR) 20: Salida de datos de comunicación SCI 21: Establecer el tiempo de ejecución 23: Establecer el valor de conteo 24: Especifica el valor de conteo 31: Fallo del convertidor 38: Salida de pulso (sólo en DO)
2 1 x
F15.20Función de relevo
31 1 x
-78-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F15.27
Detección de ancho de alcancede frecuencia (FAR)
0.0 - 100.0Hz 2.5Hz 0.1Hz O
F15.31Nivel eléctrico FDT
0.0 - F00.06 50.0Hz 0.1Hz O
F15.32 Retraso FDT F00.06 - F00.06 1.0Hz 0.1Hz O
F15.36Establecer el tiempo de ejecución
0 - 65535h 0h 1h O
F15.37
Preestablecimiento de alcance del valor de conteo establecido
F15.38 - 9999 0 1 O
F15.38
Preestablecimiento de alcance del valor de conteo especificado
0 - f15.37 0 1 O
F15.43El retraso del terminal de salida
0.0 - 100.0s 0.0s 0.1s x
F16: Parámetros de entrada y salida analógicos de los terminales
F16.00Función del potenciómetro del teclado
0: Reservado2: Ajustes de frecuencia3: Ajustes auxiliares de frecuencia5: Proceso de retroalimentación PID
0 1 x
F16.01 Función AI 2 1 x
F16.05Compensación AI
-100.0 - 100.0% 0.0% 0.1% O
F16.06 Ganancia de IA 0.00 - 10.00 1.00 0.01 O
F16.07Tiempo de filtro AI
0.01 - 10.00s 0.05s 0.01s O
F16.17Frecuencia de pulso de entrada del terminal DI4
0.0 - 50.0kHz 10.0kHz 0.1kHz O
-79-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F16.18
Tiempo de filtrado del pulso de entradadel terminal DI4
0 - 500ms 10ms 1ms O
F16.19Función AO
0: Reservado 2: Frecuencia de serie (0-máx. frecuencia de salida) 3: Rpm del motor (0-máx. frecuencia de salida corresponde a la velocidad)5: Corriente de salida (0-2 veces el tensión nominal del convertidor) 11: Voltaje de salida (0-1.2 veces el tensión nominal del convertidor) 12: Voltaje del bus DC ((0-1.2 veces el tensión nominal del inversor)
2 1 O
F16.21 Función DO 0 1 O
F16.22Compensación AO
-100.0 - 100.0% 0.0% 0.1% O
F16.23 Ganancia AO 0.0 - 200.0% 100.0% 0.1% O
F16.26
Max. frecuenciade pulso del terminal de salida DO
0.1 - 50.0kHz 10.0kHz 0.1kHz O
F17: Parámetros de comunicación SCI
F17.00Formato de datos
0: formato 1-8-2, sin paridad, RTU 1: formato 1-8-1, con paridad, RTU 2: formato 1-8-1, sin paridad, RTU
0 1 x
F17.01Velocidad de transmisión
0: 1200bps 1: 2400 bps 2: 4800 bps 3: 9600 bps 4: 19200 bps 5: 38400 bps
3 1 x
F17.02Dirección de la máquina
0 - 247 2 1 x
-80-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F17.03Tiempo de respuesta de la máquina
0 - 1000ms 1ms 1ms x
F17.04
Tiempo de detección de tiempo de espera de comunicación de LAN
0.0 – 1000.0ms0.0 No detecta errores de espera
0.0s 0.1ms x
F17.05
Tiempo de detección de error de comunicación
0.0 – 1000.0ms0.0 No detecta errores de comunicación
0.0s 0.1s x
F17.09
Parámetro de función de escritura de comunicación que ahorra la elección de EEPROM
Unidades: excepto F00.13, parámetro de función F19.03, opciones de almacenaje de comunicaciónEEPROMDecenas: F00.13, parámetro de función F19.03, opciones de almacenaje de comunicación EEPROM0: No guardar1: Guardar
01 1 x
F17.10
Tiempo de detección de tiempo de espera de comunicación de red
0.0 - 600.0s0.0: No detecta errores de tiempo
0.0s 0.1s x
-81-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F18: Mostrar parámetros de control
F18.02
Configuración del parámetro de visualización 1 en funcionamiento
0: Reservado1: Corriente nominal del convertidor3: Estatus del convertidor4: Canal principal de frecuencia establecido5: Frecuencia establecida principal 7: Frecuencia establecida8: Frecuencia dada (despuésde acc. y dec)9: Frecuencia de salida10: Establecimiento de velocidad11: Rpm de funcionamiento13: Tensión de salida14: Corriente de salida15: Referencia de torque16: Torque de salida17: Fuerza de salida18: Tensión del bus DC19: Tensión del potenciómetro del teclado de salida 20: Tensión de salida AI
8 1 O
F18.08
Configuración del parámetro de visualización 1 en parada
21: Voltaje de entrada de AI(después de procesar)28: Frecuencia de pulso del terminal de entrada DI429: Salida AO32: Temperatura del radiador33: Establecer velocidad lineal34: Velocidad lineal dada42: Valor externo de conteo43: Estatus del terminal de entrada44: Estatus del terminal de salida48: Tiempo de encendido acumulado (en horas)49: Tiempo de funcionamiento acumulado (en horas)
7 1 O
Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F18.14Ganancia de visualización de frecuencia
0.1 - 160.0 1.0 0.1 O
-82-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F18: Mostrar parámetros de control
F18.15Velocidad lineal máxima
0 - 65535 1000 1 O
F18.16Precisión de la velocidad lineal
0: Número entero1: Un decimal2: Dos decimales3: Tres decimales
0 1 x
F18.17
Pantalla iluminada con LCD modo ahorro
0: Modo actual1: Cuando hay señal de salida externa
0 1 O
F19: Parámetros de mejora
F19.07
Opciones de control del ventilador de refrigeración
0: Modo apagado automático 1: Modo apagado inmediato 2: El ventilador funciona cuando está encendido
0 1 x
F19.08
Opciones de control del ventilador de refrigeración a tiempo retardado
0.0 - 600.0s 30.0s 0.1s x
F19.12
Selección de no función en electricidad instantánea
0: No 1: Habilitar
0 1 x
F19.13Dec. tiempo en lafunción sin parar
0.01 - 600.00s 5.00s 0.01s O
F19.14La tensión se ajusta al tiempo de reacción
0.00 - 10.00s 0.10s 0.01s O
F19.15Tiempo de reacción
0 - 999V
Conver-tidor 220V: 248V
Conver-tidor 380V: 430V
1V x
-83-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F19.18Punto de parada por sobretensión
0: No1: Permitir
1 1 x
F19.19Punto de pérdida de velocidad por sobretensión
0 - 999VSegún tipo
1V x
F19.20
Selección de límite de corriente automático
0: Inválido1: Acc y dec. Efectivas, velocidad constante inválida2: dec. Velocidad constante válida
1 1 x
F19.21Nivel de límite decorriente automático
20.0 - 200.0% 150.0% 0.1% x
F19.22
Tiempo dec. límite de corriente automática
0.00 - 600.00s 0.00s 0.01s x
F19.23
Detección de terminal instantáneo eléctrico
0: Aumento de borde efectivo1: Nivel eléctrico
0 1 O
F19.24Tensíon de acciónde la unidad de freno
630V - 750VSegún tipo
1V x
F19.37Rango de ajuste de frecuencia
Unidades: el cálculo de frecuencia principal0: 0 a máx.1: mín. a máx.Decenas: reservadoCentenas: síntesis de cálculode frecuencia0: 0 a máx. 1: mín. a máx.
100 1 O
F19.39Selección de tensión de entrada
Unidades: modelo de selección de 380V de tensión de salida0: 380-460V1: 260-460V2: 200-460V
Decenas: modelo de selección de 220V de tensión de salida0: 200-240V1: 140-240V
00 1 x
F19.44Tiempo de pantalla LED
0.0 - 999.9min 5.0min 0.1min O
F20: Parámetros de protección de fallos
F20.00Protección de sobrecarga
00000: Habilitar 10000: Proteger
000000 1 O
-84-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
F19.18Punto de parada por sobretensión
0: No1: Permitir
1 1 x
F20.10Detector del datode fallo para la fase de salida
0 - 50% 20% 1% x
F20.11
Detector del tiempo de fallo para la fase de salida
0.00 - 20.00s 3.00s 0.01s x
F20.18Número de restablecimiento automático
0 - 100 0 1 x
F20.19Intervalo de restablecimiento automático
2.0 - 20.0s/veces5.0s/veces
0.1s/veces
x
F20.21Tipo del tercer (último) fallo
-Lu: Bus CC bajo tensión E001: Convertidor Acc. sobre corriente E002: Convertidor Dec. sobre corrienteE003: Velocidad constante del convertidor sobre corriente E004: bus CC Acc. sobre corrienteE005: Bus CC Dec. sobre corrienteE006: Velocidad constante del bus CC sobre tensiónE007: parada por sobretensiónE008: Fallo del módulo de energíaE009: Sobrecalentamiento del disipador de calorE011: Fallo de CPUE012: Fallo de los parámetros de autoajusteE013: Contactor no accionadoE014: Fallo del circuito de detección de corrienteE016: Fallo de la fase de salida
0 1 *
-85-

Parámetro Función Rango de ajustesPor defecto
Unidades Atributo Ajustes
E017: Sobrecarga del convertidorE019: Motor sobrecargado E021: Fallo de acceso a la placa de control EEPROME024: Fallo de equipo externoE028: Tiempo de espera de comunicación SCIE029: Error de comunicación SCI
F20.22Frecuencia preestablecida del último fallo
0.0 - 1000.0Hz 0.0Hz 0.1Hz *
F20.23Frecuencia de funcionamiento del último fallo
0.0 - 1000.0Hz 0V 1V *
F20.24Voltaje del bus de CC del último fallo
0 - 999V 0V 1V *
F20.25Voltaje de salida del último fallo
0 - 999V 0V 1V *
F20.26Corriente de salida del último fallo
0.00 - 99.99A 0.00A 0.01A *
F20.29Tiempo de intervalo del último fallo
0.0 - 6553.5h 0.0h 0.1h *
F20.30Tipo de fallo de lasegunda vez
0 - 99 0 1 *
F20.31Tiempo de intervalo de la segunda vez
0.0 - 6553.5h 0.0h 0.1h *
F20.32Tipo de fallo de laprimera vez
0 - 99 0 1 *
F20.33Tiempo de intervalo de la primera vez
0.0 - 6553.5h 0.0h 0.1h *
F23.00: Parámetro de control PWM
F23.00Ajuste de frecuencia de portadora
1-16kHz 4kHz 1kHz x
-86-

-87-

-88-
Ecologic Motor Europe Spanish Amazon, S.L.Avda. Hort Mandarí, 19,46770 XERACO,Valencia, España
Tel: 670 24 10 56Tel: +34 650 59 30 59Email: [email protected]ágina web: www.emesamotor.com
Distribuidor oficial en Europa
DISTRIBUIDOR
Top Related