






Idiomas
Páginas
Jurídico

8
UNIVERSIDAD ALAS PERUANASFACULTAD DE INGENIERIAS Y ARQUITECTURA
Escuela Profesional de Ingeniería Industrial
TRABAJO ACADEMICO
“MOTORES Y GENERADORES DE CORRIENTE CONTINUA”
1703-17406 | ELECTRICIDAD INDUSTRIAL
DOCENTE: ING. RAÚL MATOS ACUÑA
ALUMNO: ANA JESSICA QUISPE HUMPIRE
CODIGO: 2009182285
CICLO : VII
MODULO: II
AREQUIPA – PERU 2013 – II
8
INDICE Carátula Índice Introducción CAP I : Revisión preliminar (leyes, principios, teorías básicas del tema a tratar) CAP II: Desarrollo de los contenidos CAP III: Aplicaciones prácticas en la industria Conclusiones Anexos Bibliografía virtual y física (libros o manuales)
INTRODUCCION
8
En el presente reporte se exponen los detalles de la investigación sobre los generadores y motores que operan con corriente directa, con ello se pretende analizar qué diferencias existen con respecto a los generadores y motores de corriente alterna. A la vez, se hace necesario hacer notar la ventaja del uso de motores y generadores de corriente directa o continua.
Por otra parte, se hace necesario explicar las características y parámetros más importantes de los motores y generadores de corriente continua, con el objetivo de investigar más a fondo lo que respecta a ese tipo de máquinas eléctricas.
Además es necesario tener presente las fallas de este tipo de máquinas, como elegir el motor o generador adecuado, que mantenimiento debe dárseles a ellos, y otros temas relacionados con los motores y generadores de corriente continua, con la finalidad de prepararnos como futuros ingenieros mecánicos en esta área, que esta presente en un buen porcentaje en el mercado laboral de la carrera.
Por esas razones, a continuación se presentan todos esos detalles y otros no mencionados, referidos a los motores y generadores de corriente continua.
8
OBJETIVOS
Identificar diferencias y similitudes de los motores y
o generadores de corriente continua con respecto a los que
o operan con corriente alterna.
Conocer el principio de funcionamiento, así como también los
o tipos de motores y generadores de corriente continua.
Identificar las ventajas que presentan en la industria los
o generadores y motores de corriente continua o corriente
o directa.
Dar a conocer las posibles fallas que se presentan en los
o motores y generadores de corriente continua, y brindar
o información acerca de cómo debe de dárseles el
o mantenimiento para su correcta operación durante el trabajo
o en la industria.
Presentar algunos detalles implícitos dentro del área de los
o motores y generadores de corriente continua.
8
MARCO TEÓRICO
CORRIENTE CONTINUA O CORRIENTE DIRECTA
La corriente continua es el flujo continuo de electrones a través de
un conductor entre dos puntos de distinto potencial. A diferencia de
la corriente alterna, en la corriente continua las cargas eléctricas
circulan siempre en la misma dirección desde el punto de mayor
potencial al de menor. Aunque comúnmente se identifica la corriente
continua con la corriente constante (por ejemplo la suministrada por
una batería), es continua toda corriente que mantenga siempre la
misma polaridad.
PRINCIPIOS GENERALES DE LOS MOTORES Y
GENERADORES DE CORRIENTE CONTINUA.
1. Inducción Electromagnética
Un campo magnético está representado por líneas de flujo
continuas que se considera emergen de un polo norte y entran en
un polo sur.
Si las líneas de flujo se deforman por el movimiento del conductor
de la bobina antes de romperse, la dirección del voltaje inducido se
considera hacia dentro del conductor si se muestra que las flechas,
por el flujo distorsionado, apuntan en el sentido del giro de las
8
manecillas del reloj, y hacia a fuera si apuntan en sentido contrario
al giro de las manecillas del reloj. Esta es la acción de generador.
2. Fuerza sobre conductores por los que fluye corriente en
un campo magnético.
Si un conductor lleva una corriente, alrededor del mismo se forman
espiras de flujo. La dirección del flujo es en el sentido de giro de las
manecillas del reloj si la corriente es tal que se aleja del observador
y hacia el conductor, y es en sentido contrario al giro de las
manecillas del reloj si la corriente del conductor sale del papel y se
dirige al observador.
Si este conductor está en un campo magnético, la combinación del
flujo del campo y el flujo que genera el conductor puede
considerarse que produce una concentración de flujo en el lado del
conductor en donde los dos flujos son aditivos, y una disminución en
el lado en donde se oponen. El resultado es una fuerza sobre el
conductor, que tiende a moverlo hacia el lado que tiene flujo
reducido. Ésta es la acción de motor.
3. Fuerza contraelectromotriz inducida en un motor
Es la tensión que se crea en los conductores de un motor como
consecuencia del corte de las líneas de fuerza, es el efecto
generador.
8
La polaridad de la tensión en los generadores es inversa a la
aplicada en bornes del motor.
Las fuertes puntas de corriente de un motor en el arranque son
debidas a que con máquina parada no hay fuerza
contraelectromotriz y el bobinado se comporta como una resistencia
pura.
MÁQUINAS ELÉCTRICAS ROTATIVAS.
Muchos dispositivos pueden convertir energía eléctrica a mecánica
y viceversa. La estructura de estos dispositivos puede ser diferente,
dependiendo de las funciones que realicen. Algunos dispositivos son
usados para conversión continua de energía, y son conocidos como
motores y generadores. Otros dispositivos pueden ser: actuadores,
tales como solenoides, relés y electromagnetos. Todos ellos son
física y estructuralmente diferentes, pero operan con principios
similares.
Una máquina eléctrica es un dispositivo que puede convertir energía
mecánica en energía eléctrica o energía eléctrica en energía
mecánica. Cuando este dispositivo es utilizado para convertir
energía mecánica en energía eléctrica, se denomina generador;
cuando se convierte energía eléctrica en energía mecánica, se llama
motor.
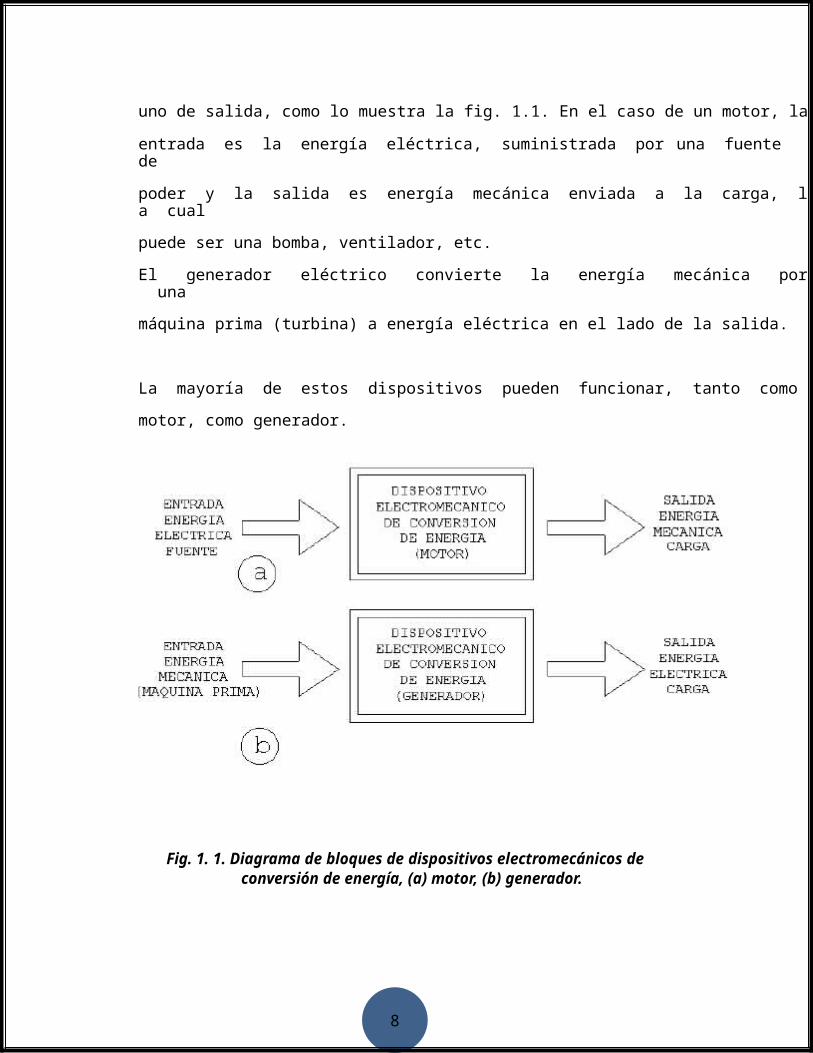
Un dispositivo electromecánico de conversión de energía es
esencialmente un medio de transferencia entre un lado de entrada y
8
uno de salida, como lo muestra la fig. 1.1. En el caso de un motor, la
entrada es la energía eléctrica, suministrada por una fuente de
poder y la salida es energía mecánica enviada a la carga, la cual
puede ser una bomba, ventilador, etc.
El generador eléctrico convierte la energía mecánica por una
máquina prima (turbina) a energía eléctrica en el lado de la salida.
La mayoría de estos dispositivos pueden funcionar, tanto como
motor, como generador.
Fig. 1. 1. Diagrama de bloques de dispositivos electromecánicos deconversión de energía, (a) motor, (b) generador.
8
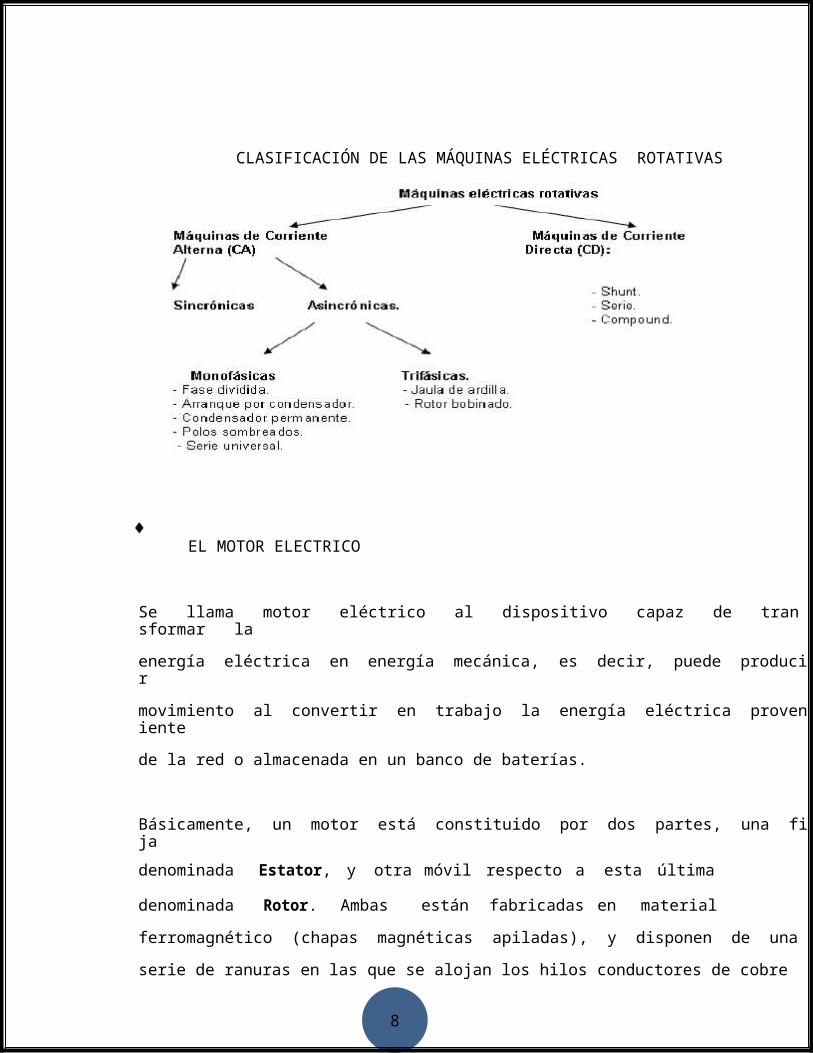
CLASIFICACIÓN DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
EL MOTOR ELECTRICO
Se llama motor eléctrico al dispositivo capaz de transformar la
energía eléctrica en energía mecánica, es decir, puede producir
movimiento al convertir en trabajo la energía eléctrica proveniente
de la red o almacenada en un banco de baterías.
Básicamente, un motor está constituido por dos partes, una fija
denominada Estator, y otra móvil respecto a esta última
denominada Rotor. Ambas están fabricadas en material
ferromagnético (chapas magnéticas apiladas), y disponen de una
serie de ranuras en las que se alojan los hilos conductores de cobre
que forman el devanado eléctrico.

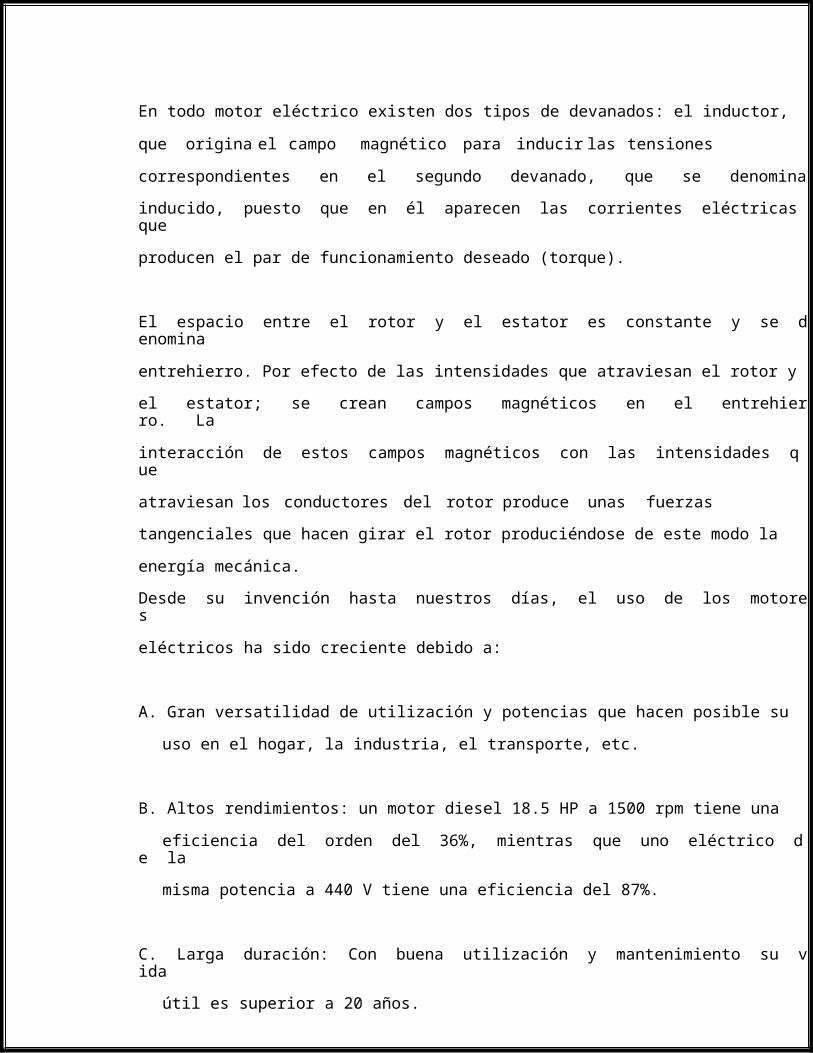
En todo motor eléctrico existen dos tipos de devanados: el inductor,
que origina el campo magnético para inducir las tensiones
correspondientes en el segundo devanado, que se denomina
inducido, puesto que en él aparecen las corrientes eléctricas que
producen el par de funcionamiento deseado (torque).
El espacio entre el rotor y el estator es constante y se denomina
entrehierro. Por efecto de las intensidades que atraviesan el rotor y
el estator; se crean campos magnéticos en el entrehierro. La
interacción de estos campos magnéticos con las intensidades que
atraviesan los conductores del rotor produce unas fuerzas
tangenciales que hacen girar el rotor produciéndose de este modo la
energía mecánica.
Desde su invención hasta nuestros días, el uso de los motores
eléctricos ha sido creciente debido a:
A. Gran versatilidad de utilización y potencias que hacen posible su
uso en el hogar, la industria, el transporte, etc.
B. Altos rendimientos: un motor diesel 18.5 HP a 1500 rpm tiene una
eficiencia del orden del 36%, mientras que uno eléctrico de la
misma potencia a 440 V tiene una eficiencia del 87%.
C. Larga duración: Con buena utilización y mantenimiento su vida
útil es superior a 20 años.
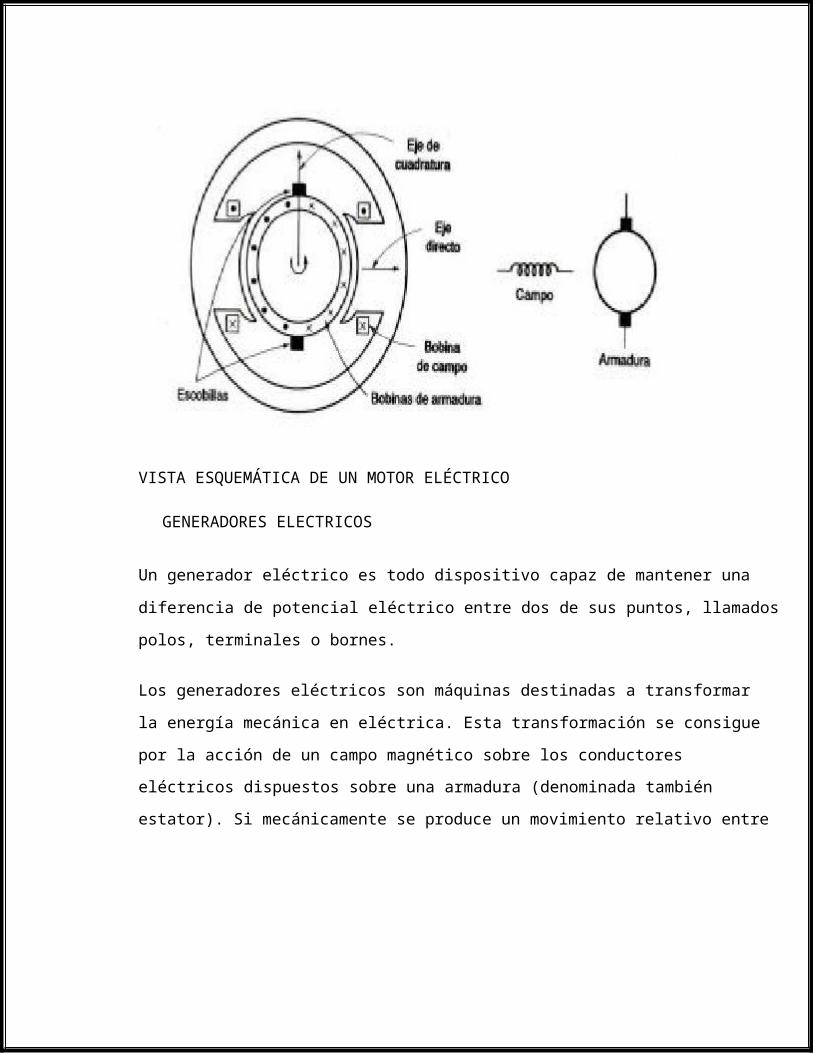
VISTA ESQUEMÁTICA DE UN MOTOR ELÉCTRICO
GENERADORES ELECTRICOS
Un generador eléctrico es todo dispositivo capaz de mantener una
diferencia de potencial eléctrico entre dos de sus puntos, llamados
polos, terminales o bornes.
Los generadores eléctricos son máquinas destinadas a transformar
la energía mecánica en eléctrica. Esta transformación se consigue
por la acción de un campo magnético sobre los conductores
eléctricos dispuestos sobre una armadura (denominada también
estator). Si mecánicamente se produce un movimiento relativo entre
los conductores y el campo, se generara una fuerza electromotriz
(F.E.M.).
Se clasifican en dos tipos fundamentales: primarios y secundarios.
Son generadores primarios los que convierten en energía eléctrica
la energía de otra naturaleza que reciben o de la que disponen
inicialmente, mientras que los secundarios entregan una parte de la
energía eléctrica que han recibido previamente. Se agruparán los
dispositivos concretos conforme al proceso físico que les sirve de
fundamento.
El generador elemental está constituido por una espira de
alambre colocada de manera que pueda girar dentro de un campo
magnético fijo y que produzca una tensión inducida en la espira.
Para conectar la espira al circuito exterior y aprovechar la f.e.m.
inducida se utilizan contactos deslizantes.
Las piezas polares son los polos norte y sur del imán que
suministran el campo magnético. La espira de alambre que gira a
través del campo magnético se llama inducido o armadura. Los
cilindros a los cuales están conectados los extremos del inducido se
denominan "anillos rozantes" o de contacto, los cuales giran a la vez
que el inducido. Unas escobillas van rozando los anillos de contacto
para recoger la electricidad producida en la armadura y transportarla
al circuito exterior.

PARTES DE UN GENERADOR ELECTRICO
1. Aislamiento2. Ventilación controlada3. Colector4. Soporte del lado conector5. Conjunto de Escobilla6. Inducido7. Cojinetes8. Caja de Borne
DESARROLLO
1. LAS MÁQUINAS DE CORRIENTE CONTINUA O DIRECTA.
Las máquinas de corriente continua (cc) se caracterizan por su
versatilidad. Debido a la facilidad con la que se pueden controlar, a
menudo se usan sistemas de máquinas de cc en aplicaciones donde
se necesita una amplia gama de velocidades de motor o de control
de la potencia de éste.
En los últimos años la tecnología de sistemas de control de estado
sólido se ha desarrollado lo suficiente para controladores de
corriente alterna (ca), y por lo tanto se comienzan a ver dichos
sistemas en aplicaciones que antes se asociaban casi
exclusivamente con las máquinas de cc. Sin embargo éstas
continuarán aplicándose debido a su flexibilidad y a la sencillez
relativa de sus lazos de control, en comparación con los de las
máquinas de ca.
Los principios de fundamentales que tienen que ver con el
funcionamiento de las máquinas son muy sencillos, pero que por lo
general se opacan por lo complejo de la construcción de las
máquinas reales.
Ecuaciones fundamentales de la máquina de corriente
continua.
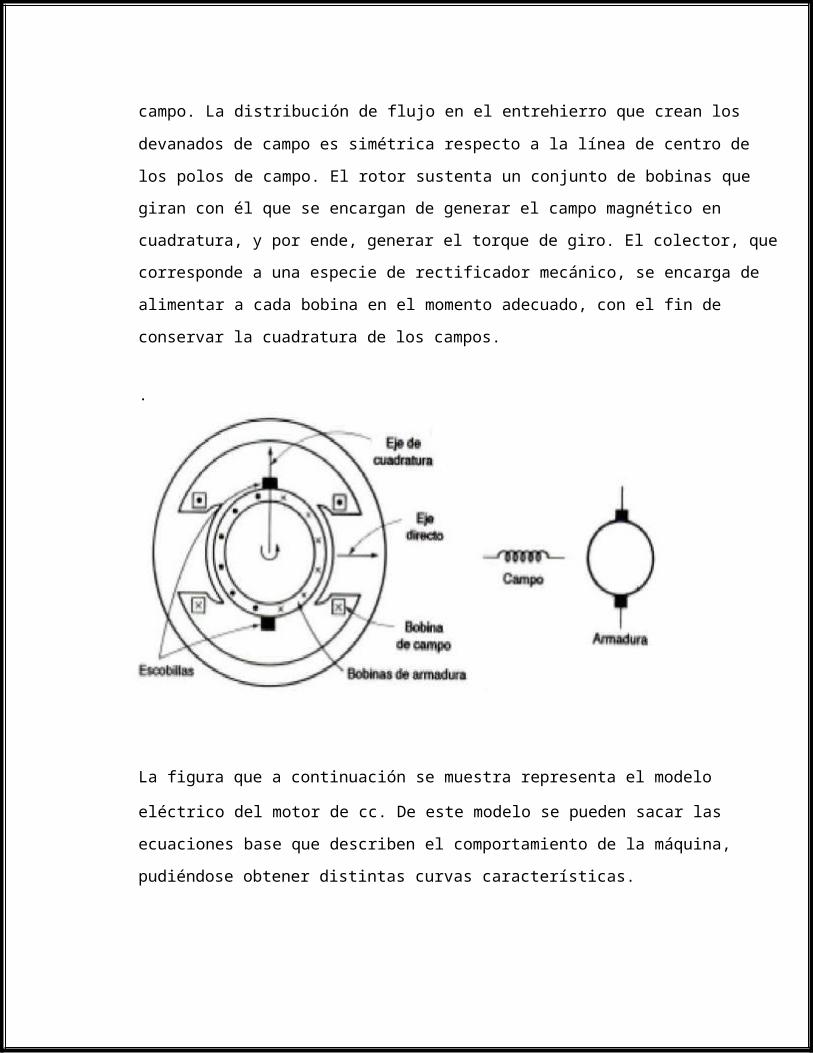
En la figura siguiente aparecen esquemáticamente las
características esenciales de una máquina de cc. El estator tiene
polos salientes y se excita mediante uno o más devanados de

campo. La distribución de flujo en el entrehierro que crean los
devanados de campo es simétrica respecto a la línea de centro de
los polos de campo. El rotor sustenta un conjunto de bobinas que
giran con él que se encargan de generar el campo magnético en
cuadratura, y por ende, generar el torque de giro. El colector, que
corresponde a una especie de rectificador mecánico, se encarga de
alimentar a cada bobina en el momento adecuado, con el fin de
conservar la cuadratura de los campos.
.
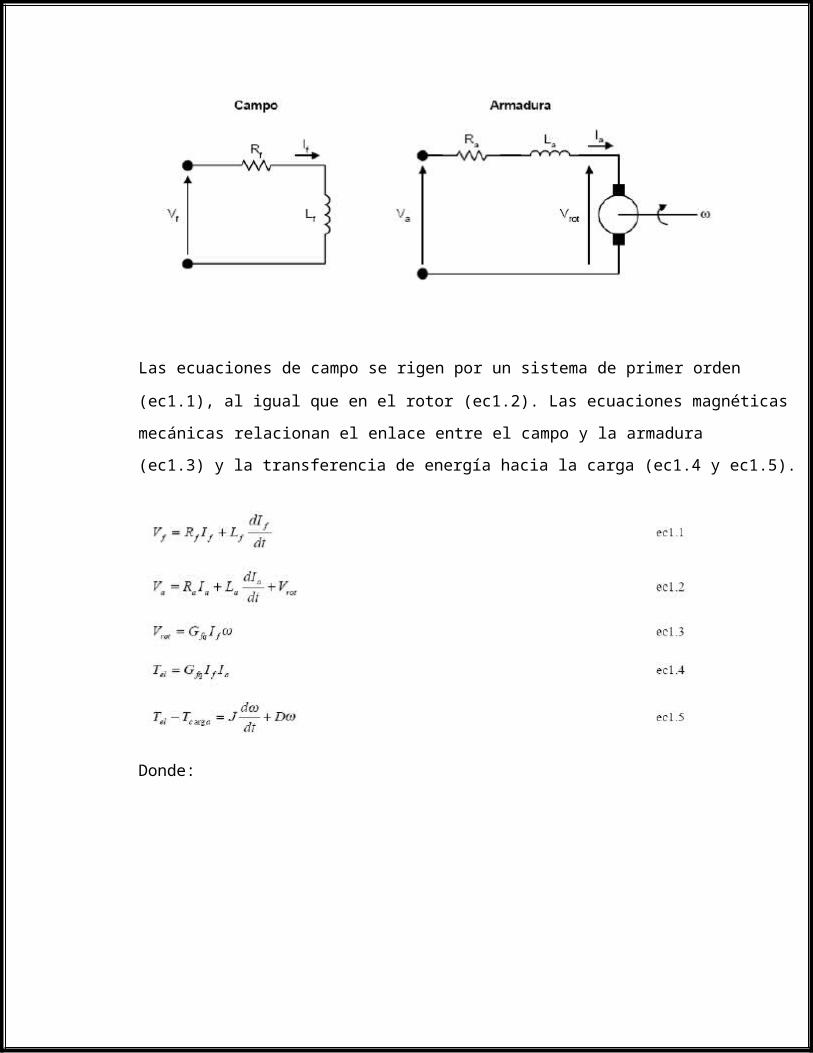
La figura que a continuación se muestra representa el modelo
eléctrico del motor de cc. De este modelo se pueden sacar las
ecuaciones base que describen el comportamiento de la máquina,
pudiéndose obtener distintas curvas características.
Las ecuaciones de campo se rigen por un sistema de primer orden
(ec1.1), al igual que en el rotor (ec1.2). Las ecuaciones magnéticas
mecánicas relacionan el enlace entre el campo y la armadura
(ec1.3) y la transferencia de energía hacia la carga (ec1.4 y ec1.5).
Donde:
2. LOS MOTORES DE CORRIENTE DIRECTA.
El motor de corriente continua o directa es básicamente un
transductor de par que convierte la energía eléctrica en energía
mecánica. El par desarrollado por el eje del motor es directamente
proporcional al flujo en el campo y a la corriente en la armadura.
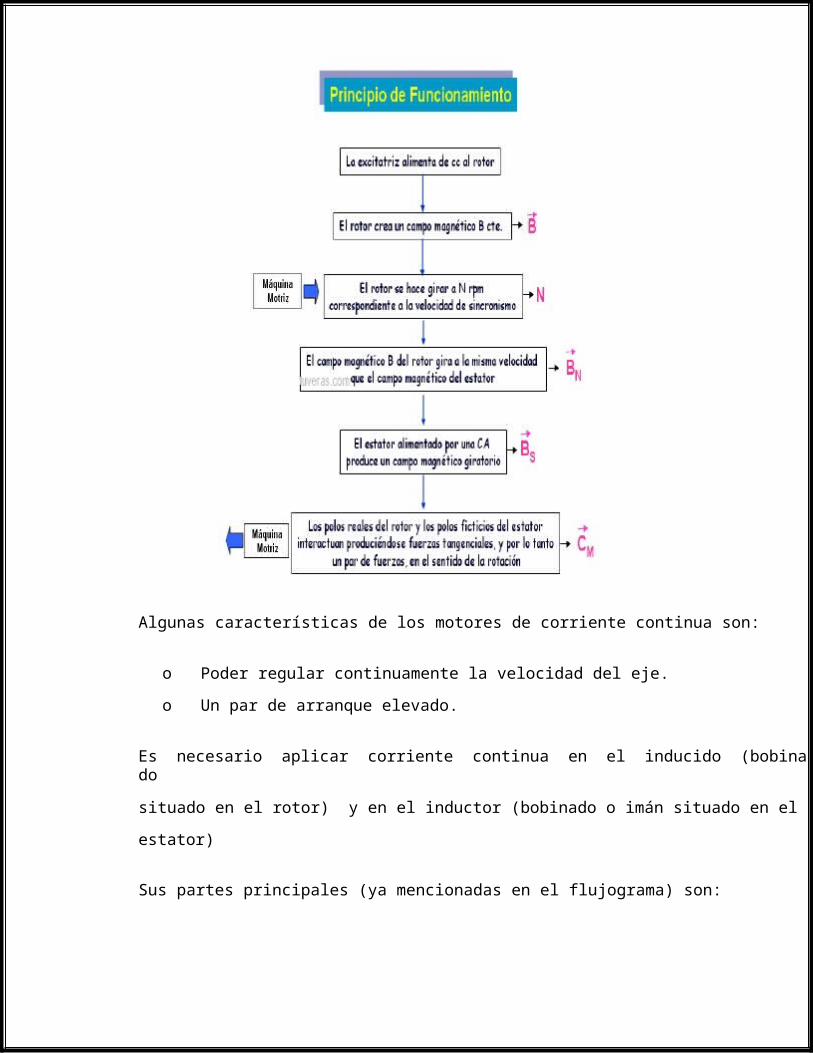
Para comprender el principio de funcionamiento de un motor
eléctrico de corriente continua, nos basaremos en el siguiente
flujograma:
Algunas características de los motores de corriente continua son:
o Poder regular continuamente la velocidad del eje.
o Un par de arranque elevado.
Es necesario aplicar corriente continua en el inducido (bobinado
situado en el rotor) y en el inductor (bobinado o imán situado en el
estator)
Sus partes principales (ya mencionadas en el flujograma) son:
Rotor
Constituye la parte móvil del motor, proporciona el torque para
mover a la carga.
Está formado por:
· EJE: Formado por una barra de acero fresada. Imparte la rotación
al núcleo, devanado y al colector.
· NÚCLEO: Se localiza sobre el eje. Fabricado con capas laminadas
de acero, su función es proporcionar un trayecto magnético entre los
polos para que el flujo magnético del devanado circule.
· DEVANADO: Consta de bobinas aisladas entre sí y entre el
núcleo de la armadura. Estas bobinas están alojadas en las ranuras,
y están conectadas eléctricamente con el colector, el cual debido a
su movimiento rotatorio, proporciona un camino de conducción
conmutado.
· COLECTOR: Denominado también conmutador, está constituido
de láminas de material conductor (delgas), separadas entre sí y del
centro del eje por un material aislante, para evitar cortocircuito con
dichos elementos. El colector se encuentra sobre uno de los
extremos del eje del rotor, de modo que gira con éste y está en
contacto con las escobillas. La función del colector es recoger la
tensión producida por el devanado inducido, transmitiéndola al
circuito por medio de las escobillas (llamadas también cepillos).
EN ESTA FIGURA SE NOS MUESTRA EL MONTAJE DE LOS ELEMENTOSQUE CONSTITUYEN AL ROTOR.
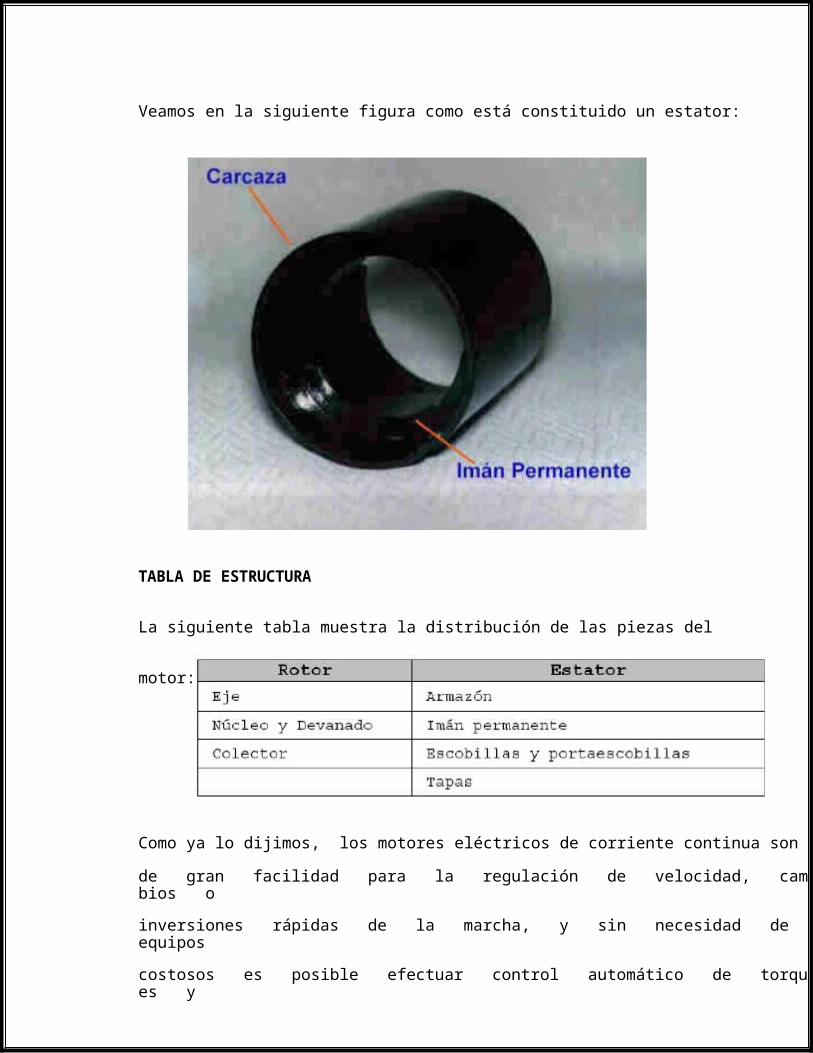
Estator
Constituye la parte fija de la máquina. Su función es suministrar el
flujo magnético que será usado por el bobinado del rotor para
realizar su movimiento giratorio.
Está formado por:
· ARMAZÓN: Denominado también yugo, tiene dos funciones
primordiales: servir como soporte y proporcionar una trayectoria de
retorno al flujo magnético del rotor y del imán permanente, para
completar el circuito magnético.
· IMÁN PERMANENTE: Compuesto de material ferromagnético
altamente remanente, se encuentra fijado al armazón o carcaza del
estator. Su función es proporcionar un campo magnético uniforme al
devanado del rotor o armadura, de modo que interactúe con el
campo formado por el bobinado, y se origine el movimiento del rotor
como resultado de la interacción de estos campos.
· Escobillas: Las escobillas están fabricadas se carbón, y poseen
una dureza menor que la del colector, para evitar que éste se
desgaste rápidamente. Se encuentran albergadas por los
portaescobillas. Ambos, escobillas y portaescobillas, se encuentran
en una de las tapas del estator.
La función de las escobillas es transmitir la tensión y corriente de la
fuente de alimentación hacia el colector y, por consiguiente, al
bobinado del rotor.
La función del portaescobillas es mantener a las escobillas en su
posición de contacto firme con los segmentos del colector. Esta
función la realiza por medio de resortes, los cuales hacen una
presión moderada sobre las escobillas contra el colector. Esta
presión debe mantenerse en un nivel intermedio pues, de ser
excesiva, la fricción desgastaría tanto a las escobillas como al
colector; por otro lado, de ser mínima esta presión, se produciría lo
que se denomina "chisporroteo", que es cuando aparecen chispas
entre las superficies del colector y las escobillas, debido a que no
existe un buen contacto.
Veamos en la siguiente figura como está constituido un estator:
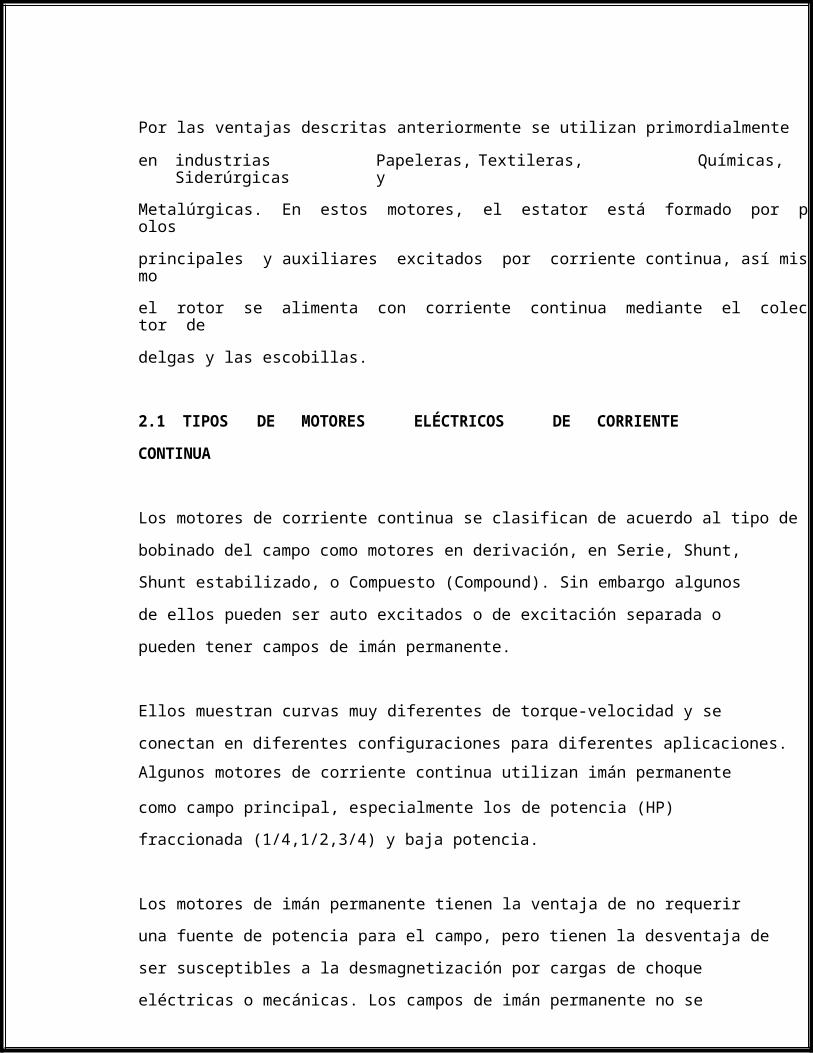
TABLA DE ESTRUCTURA
La siguiente tabla muestra la distribución de las piezas del
motor:
Como ya lo dijimos, los motores eléctricos de corriente continua son
de gran facilidad para la regulación de velocidad, cambios o
inversiones rápidas de la marcha, y sin necesidad de equipos
costosos es posible efectuar control automático de torques y
velocidades.
Por las ventajas descritas anteriormente se utilizan primordialmente
en industrias Papeleras, Textileras, Químicas, Siderúrgicas y
Metalúrgicas. En estos motores, el estator está formado por polos
principales y auxiliares excitados por corriente continua, así mismo
el rotor se alimenta con corriente continua mediante el colector de
delgas y las escobillas.
2.1 TIPOS DE MOTORES ELÉCTRICOS DE CORRIENTE
CONTINUA
Los motores de corriente continua se clasifican de acuerdo al tipo de
bobinado del campo como motores en derivación, en Serie, Shunt,
Shunt estabilizado, o Compuesto (Compound). Sin embargo algunos
de ellos pueden ser auto excitados o de excitación separada o
pueden tener campos de imán permanente.
Ellos muestran curvas muy diferentes de torque-velocidad y se
conectan en diferentes configuraciones para diferentes aplicaciones.
Algunos motores de corriente continua utilizan imán permanente
como campo principal, especialmente los de potencia (HP)
fraccionada (1/4,1/2,3/4) y baja potencia.
Los motores de imán permanente tienen la ventaja de no requerir
una fuente de potencia para el campo, pero tienen la desventaja de
ser susceptibles a la desmagnetización por cargas de choque
eléctricas o mecánicas. Los campos de imán permanente no se
pueden ajustar para entonar el motor para ajustarse a la aplicación,
como pueden los de campo bobinado.
Veamos las características principales de la clasificación de los
motores de corriente continua:
· EN DERIVACIÓN
El estator se alimenta con la misma tensión que el inducido. En los
motores en derivación, el flujo por polo es prácticamente constante,
y considerando que el par del motor es proporcional a la corriente y
que la velocidad disminuye linealmente al aumentar esta, se tiene
un motor en el que la velocidad varia muy poco cuando varía el par,
por lo cual se utilizan en casos donde la velocidad debe ser lo más
independiente posible de la carga.
Los motores con excitación independiente son prácticamente
iguales a los anteriores.
· INDEPENDIENTE
El estator y el inducido se alimentan con fuentes separadas o
independientes.
·
MOTOR EN SERIE
El estator y el inducido se conectan de modo tal que por ellos
circule la misma corriente. En un motor serie, el flujo del campo es
una función de la corriente de la carga y de la curva de saturación
del motor. A medida que la corriente de la carga disminuye desde
plena carga, el flujo disminuye y la velocidad aumenta. Para cada
motor serie, hay una mínima carga segura determinada por la
máxima velocidad de operación segura. En los motores serie, la
corriente del inducido atraviesa los polos y como el flujo producido
en un polo depende de la corriente, el flujo será variable. El
comportamiento típico de este motor es el siguiente:
· El par del motor crece al principio en forma cuadrática, más
adelante, crece en forma lineal.
· La velocidad disminuye más que proporcionalmente al crecer la
intensidad.
Por lo cual, se tiene un par muy elevado a velocidades pequeñas
(arranque) y velocidades muy grandes con pares muy pequeños.
Este tipo de motores no puede funcionar en vacío puesto que en
estas condiciones el flujo es muy pequeño y según la velocidad
aumenta produciéndose un embalamiento. No pueden usarse en
aplicaciones donde la carga pueda faltar ocasionalmente. Suelen
utilizarse para tracción eléctrica, grúas, etc.

· MOTORES COMPOUND O COMPUESTOS
Es una combinación de las conexiones en serie y en derivación. Los
motores compuestos tienen un campo serie sobre el tope del
bobinado del campo shunt. Este campo serie, el cual consiste de
pocas vueltas de un alambre grueso, es conectado en serie con la
armadura y lleva la corriente de armadura.
El flujo del campo serie varia directamente a medida que la corriente
de armadura varia, y es directamente proporcional a la carga. El
campo serie se conecta de manera tal que su flujo se añade al flujo
del campo principal shunt. Los motores compound se conectan
normalmente de esta manera y se denominan como compound
acumulativo.
Esto provee una característica de velocidad la cual no es tan “dura”
o plana como la del motor shunt, no tan “suave” como un motor
serie. Un motor compound tiene un limitado rango de debilitamiento
de campo, la debilitación del campo puede resultar en exceder la
máxima velocidad segura del motor sin carga. Los motores de
corriente continua compound son algunas veces utilizados donde se
requiera una respuesta estable de torque constante a través de un
amplio rango de velocidad. Los compuestos tienen características
intermedias a los motores en serie y derivación. Presentan elevados
pares de arranque y no tienen velocidades tan altas a bajas cargas.
· MOTOR SHUNT
En un motor shunt, el flujo es constante si la fuente de poder del
campo es fija. Asuma que el voltaje de armadura Et es constante. A
medida que la corriente de la carga disminuye desde plena carga a
sin carga, la velocidad debe aumentar proporcionalmente de manera
que la fuerza contra electromotriz Ec aumentará para mantener la
ecuación en balance. A voltaje nominal y campo completo, la
velocidad del motor shunt aumentará 5% a medida que la corriente
de carga disminuya de plena carga a sin carga. La reacción de
armadura evita que el flujo de campo permanezca absolutamente
constante con los cambios en la corriente de la carga. La reacción
de armadura, por lo tanto causa un ligero debilitamiento del flujo a
medida que la corriente aumenta. Esto tiende a aumentar la
velocidad del motor. Esto se llama “inestabilidad” y el motor se dice
que está inestable.
· MOTOR SHUNT ESTABILIZADO
Para vencer la potencial inestabilidad de un motor recto shunt y
reducir la “caída” de velocidad de un motor compound, un ligero
devanado serie es arrollado sobre el devanado shunt. El flujo del
devanado serie aumenta con la corriente de carga y produce un
motor estable con una característica de caída de velocidad para
todas las cargas.
El devanado serie es llamado un campo estabilizador o “stab” y el
motor un motor shunt estabilizado. La regulación de velocidad de un
motor shunt estabilizado es típicamente menor al 15%.
La mayoría de los motores Reliance Super RPM y RPM III son shunt
estabilizados. Cuando el campo shunt del motor es debilitado para
aumentar la velocidad a un nivel de operación mas alto, el flujo del
devanado serie llega a ser un porcentaje mayor del flujo total, de
manera que a medida que la corriente aumenta, la caída de
velocidad es un porcentaje mayor que antes.
En aplicaciones donde la instabilidad resultante pudiera afectar
seriamente el funcionamiento de la maquina (movida por el motor),
el campo serie puede desconectarse. En aplicaciones donde los
efectos de estabilidad nos son críticos, como en un frenado
regenerativo, el campo serie puede utilizarse para mejorar el
rendimiento que el provee.
Cuando el campo serie no se conecta, el fabricante del control debe
asegurar que la máxima velocidad segura del motor no es excedida
y debe reconocer la perdida de torque que resulta de la operación
del motor shunt estabilizado sin el devanado serie.
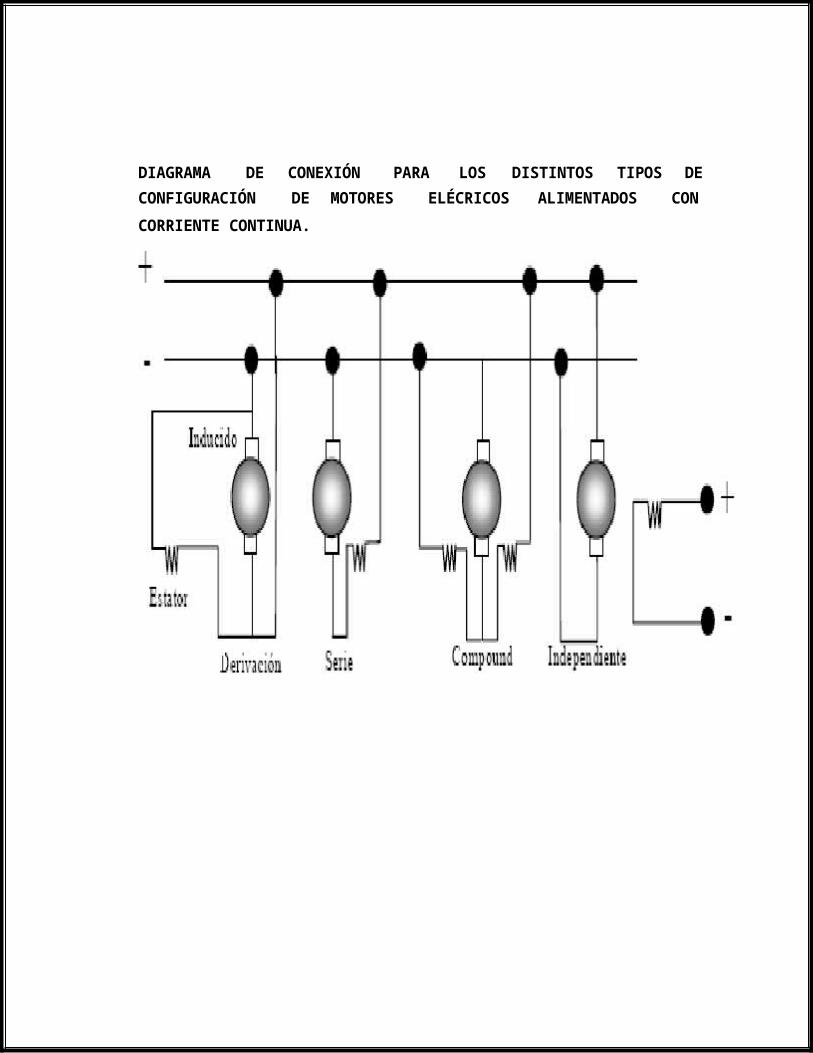
En la figura que a continuación se presenta, se muestran las
conexiones de los distintos tipos de motores de corriente continua,
conectados a la misma red de alimentación eléctrica.

DIAGRAMA DE CONEXIÓN PARA LOS DISTINTOS TIPOS DE
CONFIGURACIÓN DE MOTORES ELÉCRICOS ALIMENTADOS CON
CORRIENTE CONTINUA.
2.2 GENERADORES DE CORRIENTE CONTINUA
Los generadores de corriente continua son máquinas que
transforman la energía mecánica en energía eléctrica. Su
funcionamiento se reduce siempre al principio de la bobina giratorio
dentro de un campo magnético.
Si una armadura gira entre dos polos magnéticos fijos, la corriente
en la armadura circula en un sentido durante la mitad de cada
revolución, y en el otro sentido durante la otra mitad.
Para producir un flujo constante de corriente en un sentido, o
corriente continua, en un aparato determinado, es necesario
disponer de un medio para invertir el flujo de corriente fuera del
generador una vez durante cada revolución.
En las máquinas antiguas esta inversión se llevaba a cabo mediante
un conmutador, un anillo de metal partido montado sobre el eje de
una armadura. Las dos mitades del anillo se aislaban entre sí y
servían como bornes de la bobina. Las escobillas fijas de metal o de
carbón se mantenían en contacto con el conmutador, que al girar
conectaba eléctricamente la bobina a los cables externos.
Cuando la armadura giraba, cada escobilla estaba en contacto de
forma alternativa con las mitades del conmutador, cambiando la
posición en el momento en el que la corriente invertía su sentido
dentro de la bobina de la armadura. Así se producía un flujo de
corriente de un sentido en el circuito exterior al que el generador
estaba conectado. Los generadores de corriente continua funcionan
normalmente a voltajes bastante bajos para evitar las chispas que
se producen entre las escobillas y el conmutador a voltajes altos. El
potencial más alto desarrollado para este tipo de generadores suele
ser de 1.500 voltios. En algunas máquinas más modernas esta
inversión se realiza usando aparatos de potencia electrónica, como
por ejemplo rectificadores de diodo.
Los generadores modernos de corriente continua utilizan
armaduras de tambor, que suelen estar formadas por un gran
número de bobinas agrupadas en hendiduras longitudinales dentro
del núcleo de la armadura y conectadas a los segmentos
adecuados de un conmutador múltiple. Si una armadura tiene un
solo circuito de cable, la corriente que se produce aumentará y
disminuirá dependiendo de la parte del campo magnético a través
del cual se esté moviendo el circuito. Un conmutador de varios
segmentos usado con una armadura de tambor conecta siempre el
circuito externo a uno de cable que se mueve a través de un área
de alta intensidad del campo, y como resultado la corriente que
suministran las bobinas de la armadura es prácticamente
constante.
Los campos de los generadores modernos se equipan con cuatro o
más polos electromagnéticos que aumentan el tamaño y la
resistencia del campo magnético. En algunos casos, se añaden
interpolos más pequeños para compensar las distorsiones que

causa el efecto magnético de la armadura en el flujo eléctrico del
campo.
El campo inductor de un generador se puede obtener mediante un
imán permanente (magneto) o por medio de un electroimán
(dinamo). En este último caso, el electroimán se excita por una
corriente independiente o por autoexcitación, es decir, la propia
corriente producida en la dinamo sirve para crear el campo
magnético en las bobinas del inductor. Existen tres tipos de dinamo
según sea la forma en que estén acoplados el inductor y el
inducido: en serie, en derivación y en combinación.
Los generadores de corriente continua se clasifican según el
método que usan para proporcionar corriente de campo que excite
los imanes del mismo. Un generador de excitado en serie tiene su
campo en serie respecto a la armadura. Un generador de excitado
en derivación, tiene su campo conectado en paralelo a la
armadura.
Un generador de excitado combinado tiene parte de sus campos
conectados en serie y parte en paralelo. Los dos últimos tipos de
generadores tienen la ventaja de suministrar un voltaje
relativamente constante, bajo cargas eléctricas variables. El de
excitado en serie se usa sobre todo para suministrar una corriente
constante a voltaje variable. Un magneto es un generador pequeño
de corriente continua con un campo magnético permanente.
*APARTADO ESPECIAL: LA DÍNAMO
La dinamo fue el primer generador eléctrico apto para uso industrial.
Emplea principios electromagnéticos para convertir la energía de
rotación mecánica en corriente continua. El primer dinamo, basado
en los principios de Faraday, fue construido en 1832 por el
fabricante francés de herramientas Hipólito Pixii. Empleaba un imán
permanente que giraba por medio de una manivela. Este imán
estaba colocado de forma que sus polos norte y sur pasaban al girar
junto a un núcleo de hierro con un cable eléctrico enrollado (como
un núcleo y una bobina). Pixii descubrió que el imán giratorio
producía un pulso de corriente en el cable cada vez que uno de los
polos pasaba junto a la bobina; cada polo inducía una corriente en
sentido contrario, esto es, una corriente alterna. Añadiendo al
esquema un conmutador eléctrico situado en el mismo eje de giro
del imán, Pixii convirtió la corriente alterna en corriente continua.
Uno de los principales usos de la dinamo es la utilización de la
energía eólica, de esta forma el viento hace rotar las aspas
conectadas al eje del dinamo, produciendo electricidad y
aprovechando esta fuente de energía inagotable.
Uno de los usos más corrientes que se le dio a la dinamo fue el de
generador de energía eléctrica para el automóvil. A medida que,
desde principios del siglo XX, los automóviles se iban haciendo más
complejos, se demostró que los sistemas de generación de energía
eléctrica con los que se contaba no eran lo suficientemente potentes
para las necesidades del vehículo. Esta circunstancia favoreció la
implantación paulatina de la dinamo en el mismo.

Aunque se trataba de un elemento que proporcionaba la energía
necesaria con relativamente poco peso, presentaba ciertos
problemas. El más importante era que la velocidad de rotación que
se le suministraba nunca era constante (las revoluciones del motor
están continuamente variando) con lo cual tenía que ser capaz de
suministrar la misma corriente en ralentí (movimiento lento) que
cuando el motor estaba a pleno rendimiento.
Esto se solucionó con los reguladores que, aunque son sencillos en
su diseño, requieren de un reglaje muy delicado. Estos dispositivos
debían ser capaces de regular el voltaje y la intensidad. Además
debería evitar que la dinamo funcionara como un motor eléctrico
cuando el vehículo estuviera al ralentí, que es cuando prácticamente
no produce energía, para que el flujo de corriente no se invirtiera.
Dado que las dinamos tienen un diseño muy parecido al de los
motores eléctricos, en el automóvil llegaban a funcionar como tales
cuando se invertía el flujo de corriente al ser mayor el potencial que
suministraba la batería que el potencial que suministraba la dinamo.
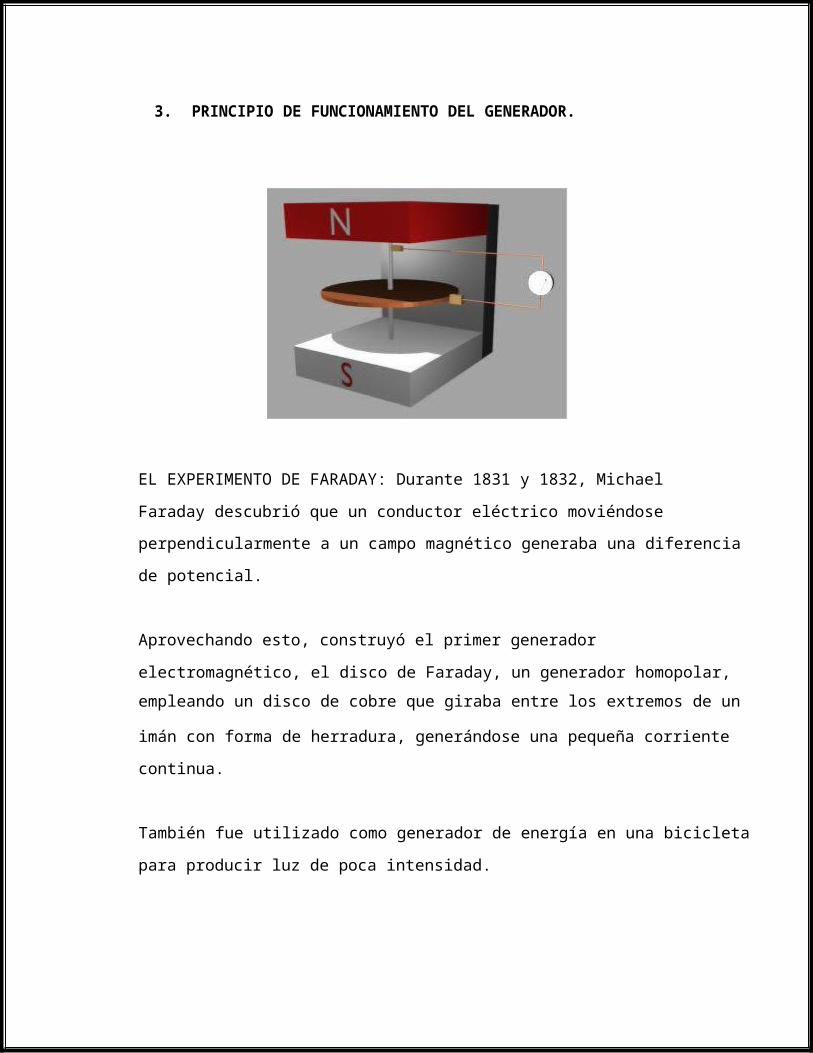
3. PRINCIPIO DE FUNCIONAMIENTO DEL GENERADOR.
EL EXPERIMENTO DE FARADAY: Durante 1831 y 1832, Michael
Faraday descubrió que un conductor eléctrico moviéndose
perpendicularmente a un campo magnético generaba una diferencia
de potencial.
Aprovechando esto, construyó el primer generador
electromagnético, el disco de Faraday, un generador homopolar,
empleando un disco de cobre que giraba entre los extremos de un
imán con forma de herradura, generándose una pequeña corriente
continua.
También fue utilizado como generador de energía en una bicicleta
para producir luz de poca intensidad.
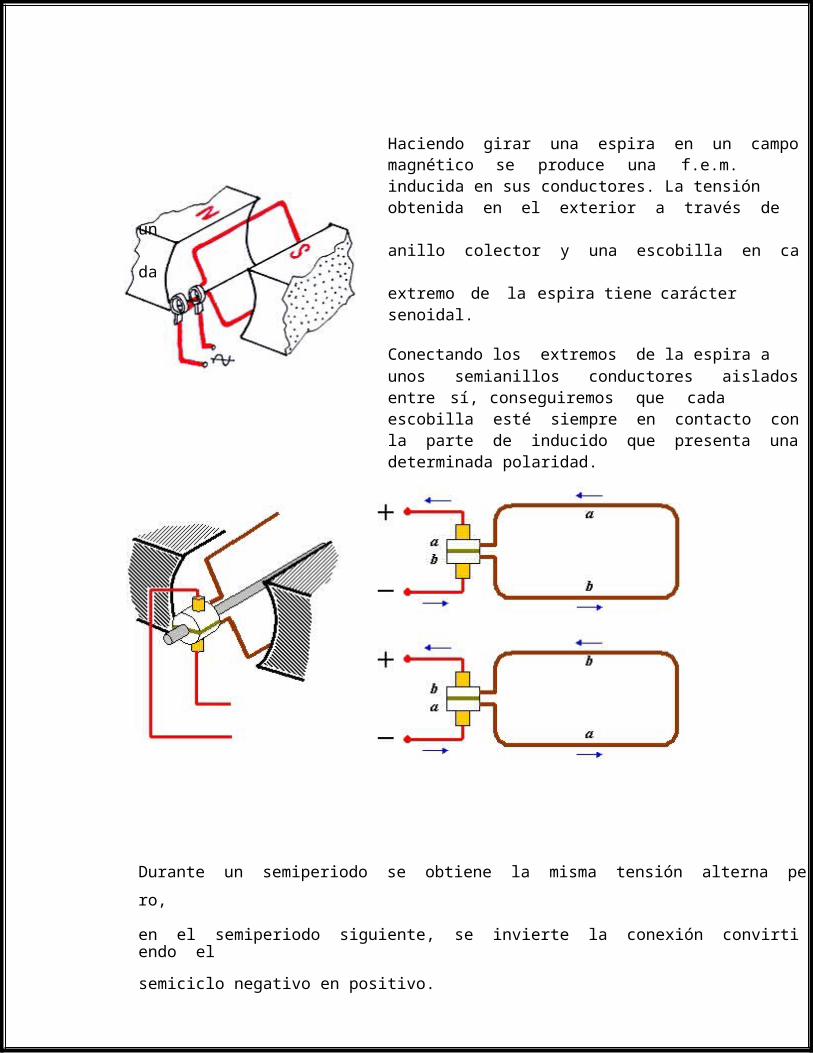
Haciendo girar una espira en un campomagnético se produce una f.e.m.inducida en sus conductores. La tensiónobtenida en el exterior a través de unanillo colector y una escobilla en cadaextremo de la espira tiene caráctersenoidal.
Conectando los extremos de la espira aunos semianillos conductores aisladosentre sí, conseguiremos que cadaescobilla esté siempre en contacto conla parte de inducido que presenta unadeterminada polaridad.
Durante un semiperiodo se obtiene la misma tensión alterna pero,
en el semiperiodo siguiente, se invierte la conexión convirtiendo el
semiciclo negativo en positivo.
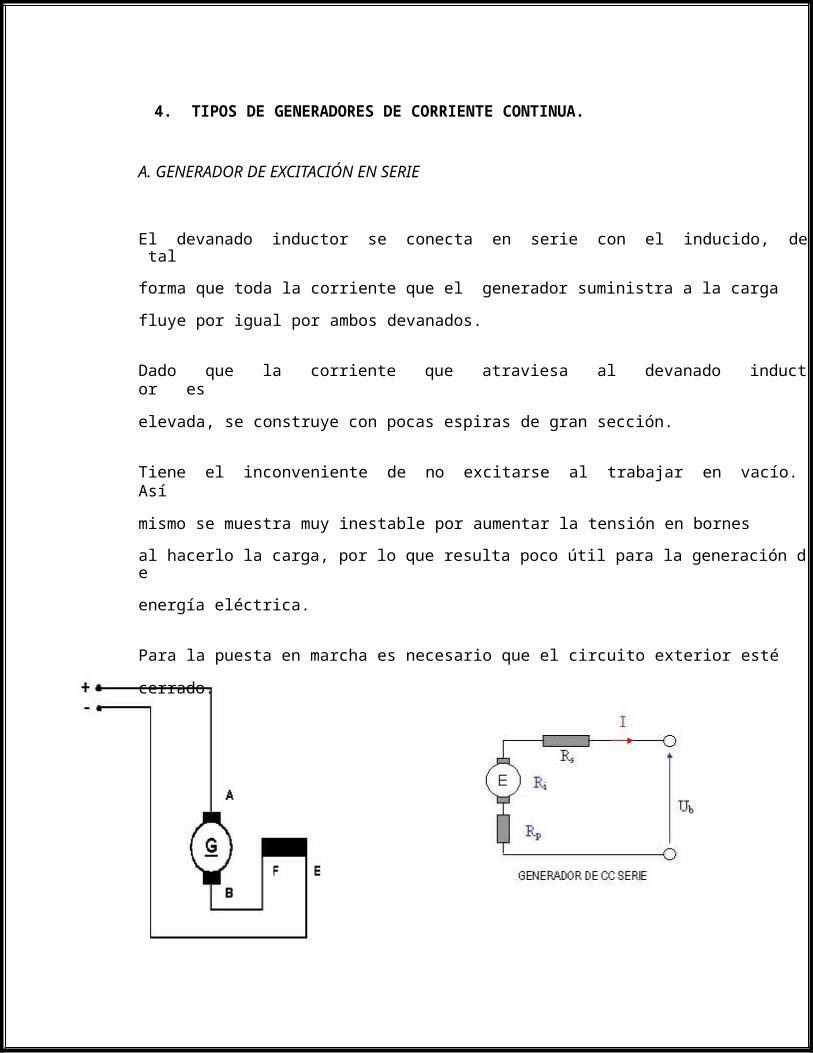
4. TIPOS DE GENERADORES DE CORRIENTE CONTINUA.
A. GENERADOR DE EXCITACIÓN EN SERIE
El devanado inductor se conecta en serie con el inducido, de tal
forma que toda la corriente que el generador suministra a la carga
fluye por igual por ambos devanados.
Dado que la corriente que atraviesa al devanado inductor es
elevada, se construye con pocas espiras de gran sección.
Tiene el inconveniente de no excitarse al trabajar en vacío. Así
mismo se muestra muy inestable por aumentar la tensión en bornes
al hacerlo la carga, por lo que resulta poco útil para la generación de
energía eléctrica.
Para la puesta en marcha es necesario que el circuito exterior esté
cerrado.
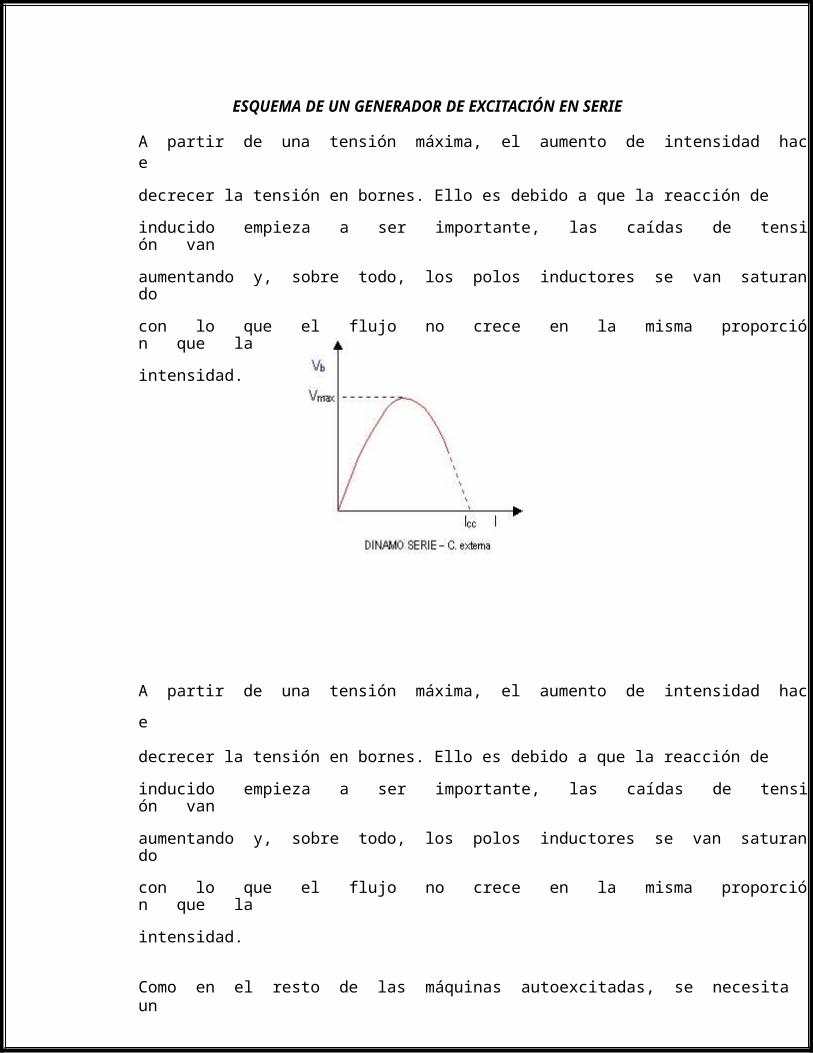
ESQUEMA DE UN GENERADOR DE EXCITACIÓN EN SERIE
A partir de una tensión máxima, el aumento de intensidad hace
decrecer la tensión en bornes. Ello es debido a que la reacción de
inducido empieza a ser importante, las caídas de tensión van
aumentando y, sobre todo, los polos inductores se van saturando
con lo que el flujo no crece en la misma proporción que la
intensidad.
A partir de una tensión máxima, el aumento de intensidad hace
decrecer la tensión en bornes. Ello es debido a que la reacción de
inducido empieza a ser importante, las caídas de tensión van
aumentando y, sobre todo, los polos inductores se van saturando
con lo que el flujo no crece en la misma proporción que la
intensidad.
Como en el resto de las máquinas autoexcitadas, se necesita un
cierto magnetismo remanente que permita la creación de corriente
en el inducido al ponerse en movimiento los conductores.
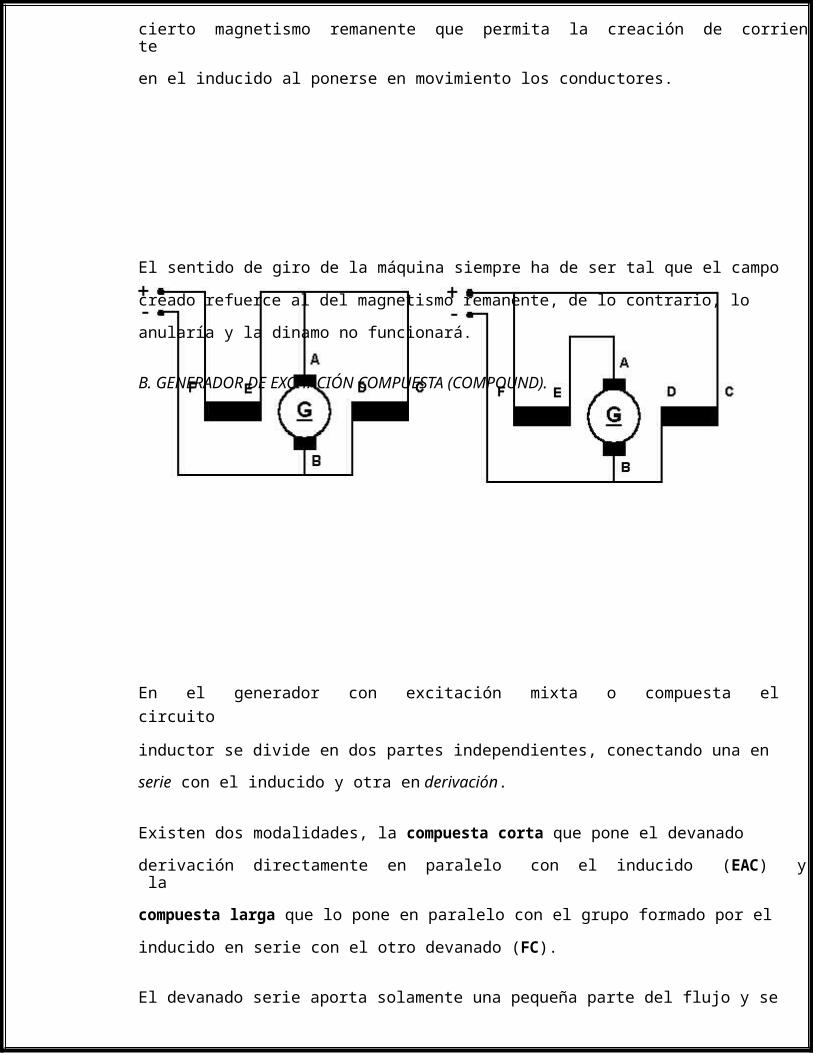
El sentido de giro de la máquina siempre ha de ser tal que el campo
creado refuerce al del magnetismo remanente, de lo contrario, lo
anularía y la dinamo no funcionará.
B. GENERADOR DE EXCITACIÓN COMPUESTA (COMPOUND).
En el generador con excitación mixta o compuesta el circuito
inductor se divide en dos partes independientes, conectando una en
serie con el inducido y otra en derivación.
Existen dos modalidades, la compuesta corta que pone el devanado
derivación directamente en paralelo con el inducido (EAC) y la
compuesta larga que lo pone en paralelo con el grupo formado por el
inducido en serie con el otro devanado (FC).
El devanado serie aporta solamente una pequeña parte del flujo y se
puede conectar de forma que su flujo de sume al flujo creado por el
devanado paralelo (aditiva) o de forma que su flujo disminuya el flujo
del otro devanado (diferencial).

Así mismo, en función del número de espiras del devanado serie su
aportación de flujo será mayor o menor, dando lugar a los tipos:
hipercompuesta, normal, hipocompuesta y diferencial.
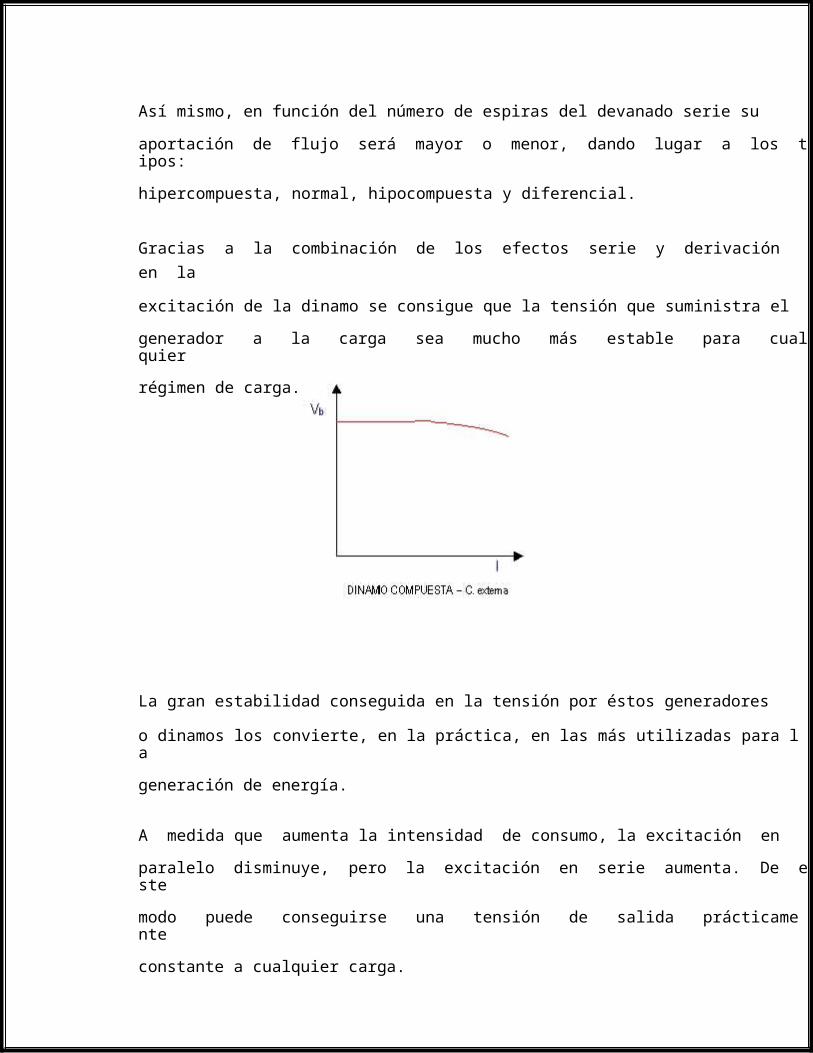
Gracias a la combinación de los efectos serie y derivación en la
excitación de la dinamo se consigue que la tensión que suministra el
generador a la carga sea mucho más estable para cualquier
régimen de carga.
La gran estabilidad conseguida en la tensión por éstos generadores
o dinamos los convierte, en la práctica, en las más utilizadas para la
generación de energía.
A medida que aumenta la intensidad de consumo, la excitación en
paralelo disminuye, pero la excitación en serie aumenta. De este
modo puede conseguirse una tensión de salida prácticamente
constante a cualquier carga.
C. GENERADOR EN DERIVACIÓN O DE EXCITACIÓN EN
PARALELO ( SHUNT )
Siendo la dinamo o generador shunt una máquina autoexcitada,
empezará a desarrollar su voltaje partiendo del magnetismo residual
tan pronto como el inducido empiece a girar. Después a medida que
el inducido va desarrollando voltaje este envía corriente a través del
inductor aumentando él número de líneas de fuerza y desarrollando
voltaje hasta su valor normal.
Puesto que circuito inductor y el circuito de la carga están ambos
conectados a través de los terminales de la dinamo, cualquier
corriente engendrada en el inducido tiene que dividiese entre esas
dos trayectorias en proporción inversa a sus resistencias y, puesto
que la parte de la corriente pasa por el circuito inductor es
relativamente elevada, la mayor parte de la corriente pasa por el
circuito de la carga, impidiendo así el aumento de la intensidad del
campo magnético esencial para producir el voltaje normal entre los
terminales.
El voltaje de una dinamo shunt variara en razón inversa de la carga,
por la razón mencionada en el párrafo anterior. El aumento de la
carga hace que aumente la caída de voltaje en el circuito de
inducción, reduciendo así el voltaje aplicado al inductor, esto reduce
la intensidad del campo magnético y por con siguiente, el voltaje del
generador. Si se aumenta bruscamente la carga aplicada a una
dinamo shunt la caída de voltaje puede ser bastante apreciable;

mientras que si se suprime casi por entero la carga, la regulación de
voltaje de una dinamo shunt es muy defectuosa debido a que su
regulación no es inherente ni mantiene su voltaje constante.
Estos generadores se adaptan bien a trabajos fuertes, pero pueden
emplearse para el alumbrado por medio de lámparas
incandescentes o para alimentar otros aparatos de potencia
constante en los que las variaciones de carga no sean demasiado
pronunciadas.
La dinamo shunt funciona con dificultad en paralelo por que no se
reparte por igual la carga entre ellas.
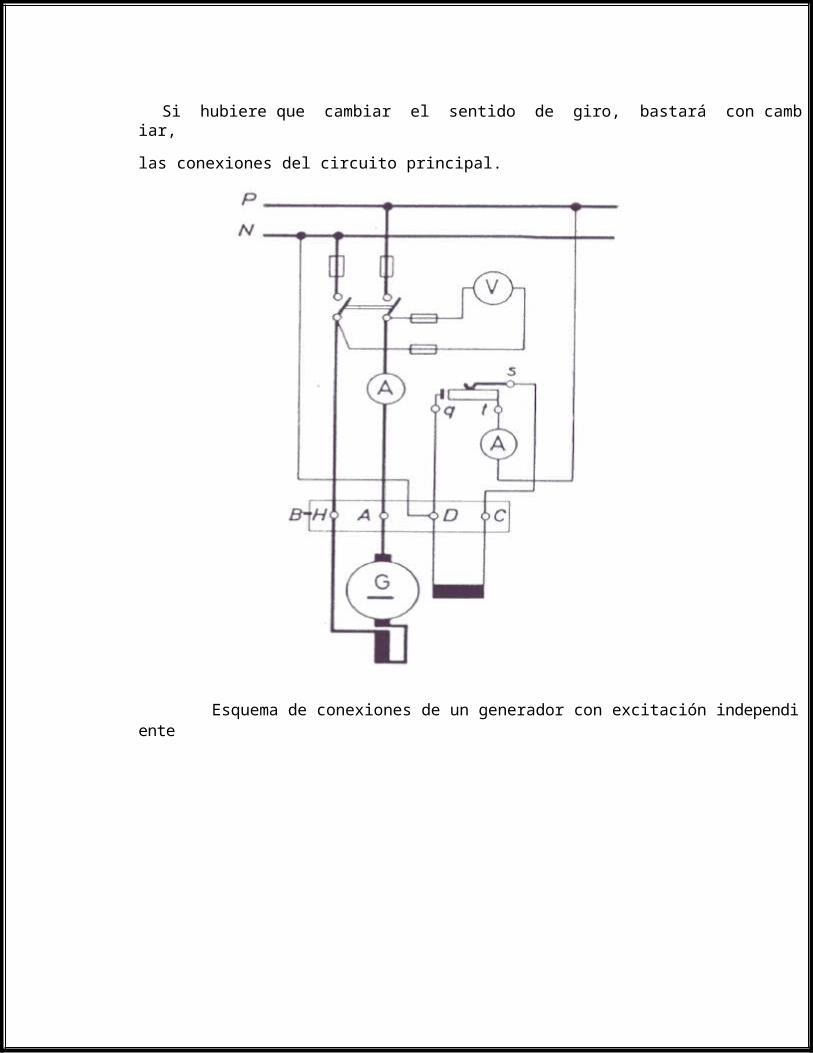
D. GENERADOR CON EXCITACIÓN INDEPENDIENTE
En este tipo de generador, la tensión en los bornes es casi
independiente de la carga de la máquina y de su velocidad, ya que
la tensión se puede regular por medio del reóstato de campo,
aunque naturalmente, dentro de ciertos límites, porque la excitación
del campo inductor no puede aumentar más allá de lo que permite la
saturación.
En la siguiente figura se representa el esquema de conexiones
completo de un generador de corriente continua con excitación
independiente; se supone que el sentido de giro de la máquina es a
derechas lo que, por otro lado, es el que corresponde a casi todas
las máquinas motrices.
Si hubiere que cambiar el sentido de giro, bastará con cambiar,
las conexiones del circuito principal.
Esquema de conexiones de un generador con excitación independiente

5. APLICACIONES Y SELECCIÓN DE MOTORES Y
GENERADORES DE CORRIENTE CONTINUA.
MOTORES
Los motores de corriente continua en derivación son adecuados
para aplicaciones en donde se necesita velocidad constante a
cualquier ajuste del control o en los casos en que es necesario un
rango apreciable de velocidades (por medio del control del campo).
El motor en derivación se utiliza en aplicaciones de velocidad
constante, como en los accionamientos para los generadores de
corriente continua en los grupos motogeneradores de corriente
directa. El motor devanado en serie se usa en aplicaciones en las
que se requiere un alto par de arranque, como en la tracción
eléctrica, grúas, malacates, etcétera. En los motores en compound,
la caída de la característica velocidad-par se puede ajustar para que
se adecue a la carga.
En aplicaciones en las que tradicionalmente se emplean motores
en compound, podría considerarse el motor PM en los casos en que
se necesiten una eficiencia un poco más alta y una mayor capacidad
de sobrecarga. En las aplicaciones de motores devanados en serie,
la consideración del costo puede influir en la decisión de hacer el
cambio. Por ejemplo, en tamaños de armazón menores de 5
pulgadas de diámetro, el motor devanado en serie es más
económico; pero en tamaños de más de 5 pulgadas, este motor
cuesta más en volúmenes grandes, y el motor PM en estos tamaños
mas grandes desafía al motor devanado en serie con sus pares
altos y su baja velocidad en vacío.
Los motores de excitación independiente tienen como
aplicaciones industriales el torneado y taladrado de materiales,
trefilación, extrusión de materiales plásticos y goma, ventilación de
horno, retroceso rápido en vacío de ganchos de grúas, desenrollado
de bobinas y retroceso de útiles para serrar. Los motores de
excitación en derivación tienen aplicaciones como ventiladores,
bombas, máquinas. Herramientas además de los citados para el
motor de excitación independiente. Entre las aplicaciones del motor
serie cabe destacar tracción eléctrica, grúas, bombas hidráulicas de
pistón y en general en aquellos procesos donde lo importante sea
vencer un par de gran precisión en la velocidad. El mayor uso del
motor compound aditivo es en estrujadoras, grúas tracción,
calandras, ventiladores, prensas, limadores, etcétera. El motor
compound diferencial presenta el peligro de embalarse para fuertes
cargas, por lo que su empleo es muy limitado.
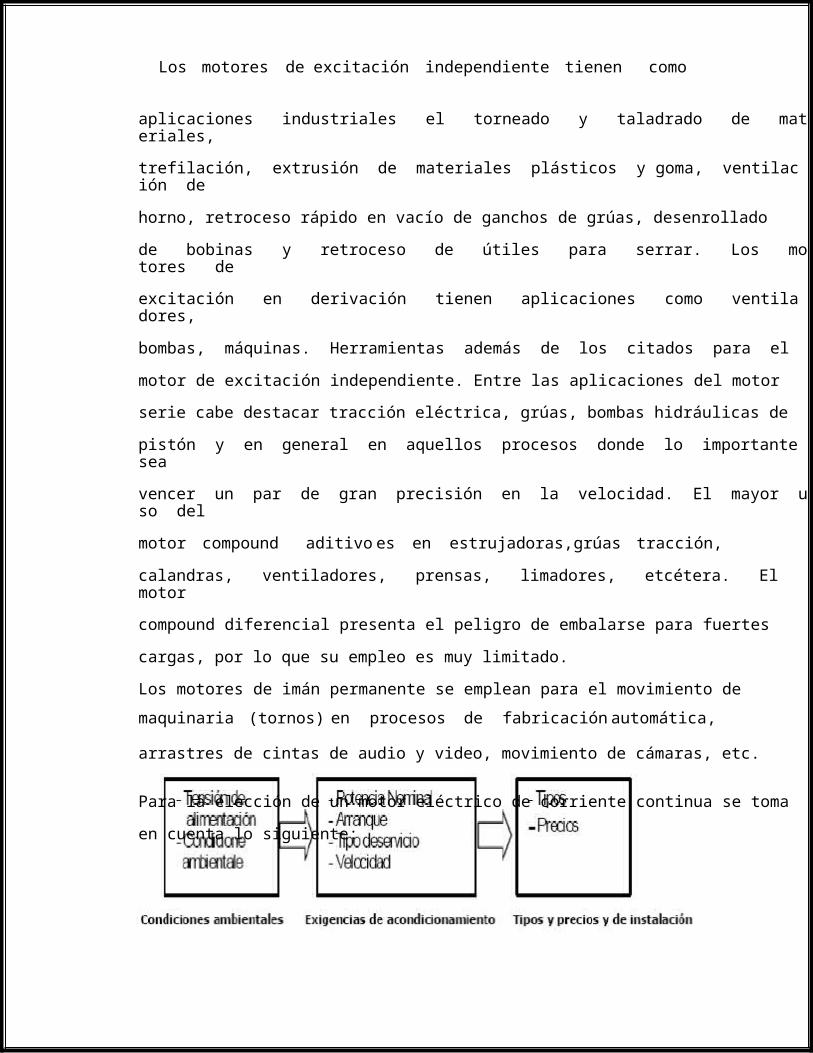
Los motores de imán permanente se emplean para el movimiento de
maquinaria (tornos) en procesos de fabricación automática,
arrastres de cintas de audio y video, movimiento de cámaras, etc.
Para la elección de un motor eléctrico de corriente continua se toma
en cuenta lo siguiente:
GENERADORES
El papel más importante que desempeña el generador de corriente
continua es alimentar de electricidad al motor de corriente continua.
En esencia produce corriente libre de rizo y un voltaje fijo de manera
muy precisa a cualquier valor deseado desde cero hasta la máxima
nominal; ésta es en realidad corriente eléctrica de corriente continua
que permite la mejor conmutación posible en el motor, porque
carece de la forma de las ondas bruscas de energía de corriente
continua de los rectificadores. El generador tiene una respuesta
excelente y es particularmente apropiado para el control preciso de
salida por reguladores de retroalimentación de control además de
estar bien adaptado para producir corriente de excitación de
respuesta y controlada en forma precisa tanto ara máquinas de
corriente alterna como para máquinas de corriente continua.
El campo de aplicación del generador con excitación independiente,
es general, siempre que se disponga de una línea independiente de
corriente continua. Sin embargo, debe hacerse la advertencia de
que estas máquinas “nunca deben trabajar en cortocircuito”, pues
existe el peligro de quemarlas; esto procede, según puede
comprenderse fácilmente de la independencia entre el circuito
inducido y el circuito de excitación. Básicamente, los generadores
con excitación independiente tienen, dos aplicaciones típicas: una,
como amplificador-multiplicador; y la otra, como tacómetro.
Los generadores con excitación serie ya no se emplean en las
centrales. Se emplearon hace ya algún tiempo para la alimentación
de grandes circuitos de lámparas de arco, pero estas lámparas han
sido sustituidas por otros tipos más modernos, como por ejemplo,
las lámparas de xenón. Los generadores con excitación en serie
tienen aplicación en aquellas actividades en las que se precise una
intensidad prácticamente constante, como puede ser en equipos de
soldaduras y en determinados sistemas de alumbrados.
Los generadores compound, tienen aplicación en las centrales para
tracción eléctrica que precisan de una tensión constante y en todos
aquellos casos en que se haya de contar con variaciones bruscas
de carga, como sucede en los talleres con grúas de gran potencia,
laminadores, etcétera; suponiendo que no se disponga de sistemas
compensadores, y que se desee la mayor constancia posible para la
tensión en las barras colectoras. También puede emplearse en
pequeñas instalaciones que precisen de tensión constante,
sustituyendo al generador shunt, para evitar una vigilancia continua
a causa de las variaciones de carga; sin embargo, hay que tener en
cuenta que, en este caso, la autorregulación no es perfecta por lo
que, en instalaciones de mayor importancia en que se desee una
tensión constante sin vigilancia, debe sustituirse el generador
compound por otros procedimientos
Los generadores con excitación mixta (compound) son utilizados en
el sistema de generación de energía eléctrica de corriente continua
en aviones polimotores, en los que existe un generador para cada
motor y se realiza un acoplamiento en paralelo de los mismos para
atender a toda la energía eléctrica necesaria.
6. PARTICULARIDADES
6.1 ARRANQUE DE MOTORES DE CORRIENTE DIRECTA
Los motores de corriente directa de pequeña capacidad se pueden
arrancar al conectar directamente el motor al voltaje de línea. Los
motores con capacidad nominal de 2 caballos de fuerza o más en
general requieren un arrancador con voltaje reducido. El voltaje
reducido para el arrancador se obtiene al emplear resistencias en
serie con la armadura del motor, o bien, al hacer variar el voltaje de
alimentación a la armadura. Se puede usar control manual o
magnético.
Los motores de corriente continua en accionamientos de voltaje
ajustable y velocidad ajustable se arrancan al hacer girar el control
de la velocidad hacia arriba, desde cero hasta la velocidad deseada,
o bien, mediante circuitos internos que elevan paulatinamente el
voltaje de la armadura hasta el valor deseado. No se requiere
equipo de arranque que no sea el rectificador o generador de voltaje
de la armadura.
6.2 CONTROLADORES MAGNÉTICOS PARA GRANDES
MOTORES DE CORRIENTE DIRECTA.
Estos controladores se fabrican con formas que se ajusten a la
aplicación- Los controladores se encuentran en las formas
siguientes:

1. Sin cambio de marcha, sin frenado dinámico y con éste.
2. Sin cambio de marcha, con regulación de la velocidad por control
del campo, sin frenado dinámico y con éste.
3. Con inversión de marcha y con frenado dinámico, sin regulación
de la velocidad por control del campo y con esta regulación.
6.3 SISTEMAS UTILIZADOS PARA LA REGULACIÓN DE LA
VELOCIDAD EN LOS MOTORES
CONTROL REOSTÁTICO EN EL CIRCUITO INDUCTOR
Según la expresión de la velocidad, ésta puede variar en razón
inversa al flujo, de forma que otro procedimiento de regular la
velocidad de un motor es variando la corriente de excitación.
La variación de corriente de excitación se logra intercalando un
reóstato en serie con el devanado de campo en el motor derivación,
y en paralelo en el motor serie.
Este sistema de regulación presenta las ventajas de sencillez de
realización y de reducido consumo, ya que las pérdidas por efecto
Joule son:
Pj R r Iex 2
En el motor existe una derivación muy reducida la corriente Iex, y
en el motor serie, mínima la resistencia desviadora Rr.
Sin embargo, este sistema no es muy utilizado, por ofrecer una
gama de control de velocidad reducida (de 1 a 2,5). Este
inconveniente surge, tanto al disminuir la velocidad, por la limitación
de la saturación del circuito magnético, como en el aumento, por el
excesivo valor de corriente y la consiguiente reacción de inducido.
REGULACIÓN POR ACOPLAMIENTO DE MOTORES
Este sistema es apropiado para los servicios que necesiten de
varios motores como ocurre en tracción eléctrica.
Así, una locomotora que dispone de seis motores serie emplea
las conexiones siguientes:
Serie: En la que permanecen los 6 motores acoplados en serie,
por lo que a cada motor se aplicará 1/6 de la tensión de red, y los
motores girarán a la velocidad más reducida.
Serie-paralelo: Formada por dos ramas de 3 motores en serie, y
éstas a su vez en paralelo. La tensión aplicada a cada motor será
de 1/3 de la tensión de red, por lo que el motor girará a mayor
velocidad que en el caso anterior.
Paralelo: Formada por 3 ramas de 2 motores en serie. y éstas a
su vez en paralelo. La tensión que se aplica a cada motor es 1/2

de la tensión de red.
6.4 LA REGULACIÓN DEL VOLTAJE DE UN GENERADOR DECORRIENTE DIRECTA.
Esta regulación es la razón de la diferencia entre el voltaje sin carga
y aquella a plena carga al voltaje a carga nominal. La característica
es normalmente una reducción a medida que la carga aumenta,
pero se puede elevar debido a los efectos de campo en serie o a la
acción de corrientes circulantes de comunicación a operación a muy
bajo voltaje.
Para un generador de cd, la ecuación de voltaje terminal es:
TV = E – IR (K ( t) (r/min) – IR)
En donde E es la Fem. Inducida, IR es la caída de circuito de
armadura, K es una constante que depende del diseño de la
máquina y t es el flujo total de polo principal del generador.
Las curvas de regulación se calculan fácilmente mediante el uso de
las curvas de saturación sin carga y plena carga. El efecto del
método de excitación se encuentra si se usa la línea del campo e IR
de reóstato para máquinas autoexcitadas y por línea de ampere-
vueltas constantes para excitación separada.
53
7. FALLAS EN MOTORES Y GENERADORES DE CORRIENTE
CONTINUA
7.1 FALLAS EN LOS MOTORES
Se define a falla eléctrica como "cualquier evento que impide la
normal operación (disponibilidad) de algún equipo, esquema o
componente de control y protección". Esta amplia definición permite
el registro de eventos, aún cuando el equipo afectado no se
encuentre plenamente inoperativo, situación muy frecuente en el
campo del control y protección de Sistemas Eléctricos. Por otra
parte, se define Atención Correctiva como “un procedimiento
preestablecido y destinado a retornar a su estado normal de
operación (definido o provisorio) al objeto afectado por la falla”.
Existen diferentes enfoques para analizar y evaluar el impacto de las
fallas sobre los equipos del sistema eléctrico de las Industrias, en
general basadas en la evaluación de la potencia o energía perdida
con ocasión de cada falla. En este sentido las fallas en un motor
eléctrico pueden ser originadas por:
· Fallas en los Sistemas de Protección y Control.
· Fallas originadas en la operación
· Fallas debidas a la no Calidad de la Potencia
FALLAS EN LOS SISTEMAS DE PROTECCIÓN Y CONTROL
Aunque existan fallas relacionadas con la operación de los equipos
y la no calidad de la energía, es el sistema de protección y control
quién finalmente realiza una acción determinada. La particular
naturaleza de los trabajos del área responsable de los Sistema de
Protección y Control, hacen que el enfoque relacionado con la
pérdida de potencia no sea adecuado por cuanto muchas de las
fallas que afectan a tales equipos no llegan a producir interrupción.
FALLAS ORIGINADAS EN LA OPERACIÓN
A este grupo corresponde las fallas asociadas a los incrementos de
temperatura en equipos, y problemas de vibración mecánica. En el
primer caso, la sobrecarga de los motores y conductores son
consecuentes a la circulación de corrientes elevadas que originan, a
su ves, pérdidas de energía, ineficiencias en los procesos, extra
costos en la operación y mantenimiento, calentamiento excesivo de
las partes, e incluso, hasta la misma destrucción del equipo si los
sistemas de control y protección no son los adecuados. En este
caso, la calidad de la energía se ve seriamente afectada puesto que
las sobrecorrientes originan caídas de tensión considerables.
Para contrarrestar las fallas eléctricas por incrementos de
temperatura es indispensable realizar, entre otros, una limpieza
periódica de las partes del motor y los conductores, chequeos a los

sistemas de protección, y pruebas termográficas en barrajes,
conductores, carcasas, puntos de conexión y aislamientos térmicos.
Con respecto a las vibraciones mecánicas, son el resultado de
fuerzas magnéticas desiguales que actúan sobre el rotor o sobre el
estator. Dichas fuerzas desiguales pueden ser debidas a:
· Rotor que no es redondo.
· Chumaceras del inducido que son excéntricas.
· Falta de alineamiento entre el rotor y el estator.
· Entrehierro no uniforme.
· Perforación elíptica del estator.
· Devanados abiertos o en corto circuito.
· Hierro del rotor en corto circuito.
Las vibraciones ocasionadas por los problemas eléctricos
responden generalmente a la cantidad de carga colocada en el
motor. A medida que se modifica la carga, la amplitud y/o las
lecturas de fase pueden indicar cambios significativos. Esto explica
por qué los motores eléctricos que han sido probados y balanceados
en condiciones sin carga muestran cambios drásticos de los niveles
de vibración cuando vuelven a ser puestos en servicio.
Un caso particular de vibraciones mecánicas lo constituyen las
poleas desgastadas y bandas destempladas en accionamientos
mecánicos, cuyo efecto en motores es la presencia de desbalances
de corriente, que a su vez, originan desbalances de tensión (pérdida
de la calidad de la potencia).
FALLAS DEBIDAS A LA NO CALIDAD DE LA POTENCIA
Los problemas relacionados con la calidad de potencia están muy
ligados a una amplia gama de fenómenos. Aproximadamente en dos
tercios de los casos se trata de fenómenos naturales, como los
rayos. Otras causas de la pérdida de la calidad de energía la
constituyen la operación de equipos de gran potencia en la industria
o en la red misma (por ejemplo, la conexión de condensadores) y,
en general, una variedad de fenómenos que pueden llegar a
producir caídas súbitas de tensión a nivel del consumidor y que
hacen muy compleja la evaluación de la calidad de potencia. Las
perturbaciones que generalmente afectan la calidad de la potencia
se clasifican en las siguientes categorías:
Fluctuaciones de voltaje. Variaciones momentáneas de alto y bajo voltaje. Interrupción permanente en equipos y/o en procesos. Armónicos Transitorios

7.2 FALLAS EN LOS GENERADORES
CONMUTACIÓN DEFICIENTE: El chisporroteo y las quemaduras
de barras se deben por lo general a una o más de las siguientes
causas:
a) Los carbones no están en la posición correcta.
b) SEPARACIÓN INCORRECTA DE LOS CARBONES: Esto
puede comprobarse al marcar una cinta de máquina sumadora
alrededor del conmutador.
c) MICA QUE SOBRESALE DEL BORDE DE BARRA: La mica
entre barras debe cortarse al sesgo como 0.063 in debajo de
la superficie de conmutación, pero en ocasiones se dejan por
descuido astillas de mica a lo largo de la barra.
d) CONMUTADOR ÁSPERO O QUEMADO: El conmutador debe
ser esmerilado según el manual de instrucciones del
fabricante.
e) CONMUTADOR RANURADO: Esto puede evitarse si se
alternan debidamente los juegos de carbones, de modo que
los espacios entre los carbones de un brazo queden cubiertos
por carbones de la misma polaridad de otros brazos.
f) CONTACTO DEFICIENTE DE CARBONES DEBIDO A
AJUSTE INCORRECTO DE LOS CARBONES A LA
SUPERFICIE DEL CONMUTADOR: Para asentar los
carbones, pásese papel de lija entre el conmutador y la cara
del carbón; no debe usarse lija esmeril porque su abrasivo es
conductor.
g) Carbones gastados y sustituidos por otros de tamaño o grado
diferente.
h) Carbones que se pegan, que no se mueven libremente en sus
portacarbones de modo que puedan seguir las irregularidades
del conmutador.
i) CREPITACIÓN DE LOS CARBONES: Por lo general esto se
debe a la operación con densidades de corriente debajo de 35
A/in2 y debe ser corregida levantando los carbones para
elevar la densidad o usando un grado especial de carbones.
j) VIBRACIÓN: Esto puede deberse a alineación defectuosa,
cimentación inadecuada o balanceo deficiente del rotor.
k) VUELTAS EN CORTOCIRCUITO EN LOS CAMPOS DE
CONMUTACIÓN O DE COMPENSACIÓN: pueden ser obvias
en una inspección pero por lo general deben encontrarse al

pasar una corriente alterna por ella para comparar caídas de
voltaje.
l) UNIONES ABIERTAS O DE MUY ALTA RESISTENCIA
ENTRE EL CUELLO DEL CONMUTADOR Y LOS HILOS DE
BOBINA: En este caso, por lo general se quema la barra y la
junta mala.
m) UNA BOBINA ABIERTA DE ARMADURA: Un conductor de
bobina roto produce un efecto similar al de las uniones
defectuosas descritas en l. Para operación de emergencia, la
bobina abierta puede ser abierta en ambos extremos, aislada
del circuito y puesto un cable en las terminales de los dos
cuellos afectados. Como es probable que se produzcan
algunas chispas, la operación debe ser limitada.
n) BOBINAS DE CAMPO PRINCIPAL EN CORTOCIRCUITO:
Con los resultantes flujos desbalanceados de entrehierro bajo
los polos, deben esperarse grandes corrientes circulantes
incluso con buenas conexiones cruzadas de armadura. La
bobina causante puede encontrarse al comparar caídas de
voltaje en las bobinas individuales.
o) Bobina de campo principal invertida.p) Sobrecarga.
8. MANTENIMIENTO Y PRUEBAS DE MOTORES Y
GENERADORES DE CORRIENTE CONTINUA
Las inspecciones, las lubricaciones y la limpieza periódica y sistemática
hacen parte de un necesario programa de
mantenimiento preventivo de las máquinas eléctricas, todo ello con
el fin de evitar daños y paradas innecesarias en el trabajo.
La ubicación de las máquinas eléctricas va desde lugares en donde
no hay polvo, suciedad ni humedad, hasta sitios donde se encuentra
toda clase de suciedad. Por eso el periodo de las operaciones de las
inspecciones varía según el caso, desde cada semana, hasta casa
año, condicionando eso, no solamente por el medio donde trabaja el
motor, sino también por el tiempo de trabajo y de la naturaleza del
servicio que desempeña. En línea general, se deben observar las
siguientes reglas:
CADA SEMANA
· Verificar el nivel de aceite de los cojinetes y de los anillosengrasadores.
· Verificar las conexiones de la caja de bornes (cables pelados,
tuercas no apretadas).
· Examen de los fusibles y de los aparatos de control.
· Verificación del alcance de la velocidad de plena carga en un
tiempo normal.
· Verificar la tensión en los bornes del motor.
CADA SEIS MESES
· Verificar la grasa o el estado del aceite de los cojinetes (excesiva
grasa puede producir recalentamiento).
· Examinar las escobillas y portaescobillas (verificar la presión, la
correcta posición y el desgaste. Las escobillas que están
desgastadas a más de la mitad deben ser sustituidas).
· Escuchar el motor a plena velocidad de carga y observar
eventuales ruidos mecánicos, luego desde parado, mover el eje
para averiguar eventuales desgastes de los cojinetes.
· Verificar pernos que sujetan la base del motor, los tornillos que
sujetan la placa, los escudos, las tapas de los cojinetes y las
tapas de protección.
· Inspeccionar el estado de los aparatos de control (arreglar los
contactos estropeados y apretar bien las conexiones, verificar el
estado de los resortes de los contactos).
· Verificar si por algún fusible quemado, el motor no está trabajando
con todas las tres fases.
· Limpiar la suciedad del motor usando aspiradores (los
compresores echarían la suciedad en los enrollamientos).

CADA AÑO
· Limpiar los cojinetes de casquillos y renovar el aceite o grasa (esto
es condicionado al ambiente de trabajo del motor).
· Verificar el grado de aislamiento del motor. Si la lectura es inferior
a un megahomio (1 MΩ) y se presume que el motor esté muy
húmedo, entonces hay que secarlo con una estufa hasta que la
lectura sea satisfactoria.
· Verificar la corriente absorbida por el motor a plena carga,
compararla con la que indica la placa de características y concluir
si el motor está sobrecargado o subcargado.
· Verificar la holgura del entrehierro con un calibrador de láminas (no
se debe admitir una reducción de esta holgura superior al 20%
del entrehierro normal.
CADA DOS AÑOS
· Desmontar el motor y limpiarlo con tetracloruro de carbono.
· Secado y rebarnizado del motor (operación condicionada al tipo de
trabajo del motor y al medio circundante).
PRUEBAS GENERALES EN AMBOS TIPOS DE MÁQUINAS
ELÉCTRICAS:
1.- SOBREVELOCIDAD.
2.- SATURACIÓN SIN CARGA.
3.- COMPORTAMIENTO.
4.- SATURACIÓN CON CARGA.
5.- PAR-VELOCIDAD.
6.- ROTOR BLOQUEADO.
7.- EQUILIBRIO TÉRMICO.
8.- VIBRACIÓN MECÁNICA.
9.- EFICIENCIA ENERGÉTICA.

Top Related