







Idiomas
Páginas
Jurídico


REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
1
Miguel Hernando Gutiérrez
Regulación AutomáticaTema 14. Consideraciones y acciones básicas de control.
Departamento deIngenieríaEléctrica,Electrónica,AutomáticayFísicaAplicadaInformáticaIndustrial
EscuelaUniversitariade IngenieríaTécnicaIndustrialEscuela Técnica Superior de Ingeniería yDiseño Industrial

REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
2
Contenido14.1 Análisis de Requisitos
14.2 Tipos de reguladores.
14.3 El regulador P y el lugar de las raíces.
14.4. El regulador PID. Ajustes empíricos.
Bibliografía recomendada:Apuntes de Regulación Automática II. C.Platero, M. Hernando 2005.

3
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
1. Análisis de Requisitos
Requisitos del sistema de control (I)• Son el conjunto de especificaciones dinámicas que han de presentarse para
cumplir determinados objetivos en cuanto al funcionamiento del sistema• El objetivo fundamental de un sistema de control SISO es conseguir que la señal
de salida siga a la entrada, haciendo que las perturbaciones sobre el sistema noinfluyan nada o mínimamente sobre el equipo
• En general respecto de la respuesta, el sistema deberá cumplir cuatro requisitos:1. El sistema debe ser estable,2. debe de tener una determinada precisión,3. debe de estar adecuadamente amortiguado y debe ser lo suficientemente
rápido4. Rechazo a las perturbaciones.
• El grupo de requisitos orientados a especificar la respuesta transitoria se puedendar tanto en el dominio del tiempo (mediante la aproximación de polosdominantes) como en el de la frecuencia.
• La precisión se indica bien mediante el error permisible o las constantes de errorcorrespondientes.

4
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
Dominio del tiempo
Sobreoscilación MP, tPTiempo de subida tr
Tiempo de establecimiento tsConstantes de error Kp, Kv, Ka
Dominio de la frecuencia
Margen de fase γFrecuencia de cruce de ganancia ωg
Pico de resonancia y frecuencia de resonancia Mr, ωrConstantes de error Kp, Kv, Ka
Dominio complejo
Coeficiente de amortiguamiento ζConstante de amortiguamiento σ
Frecuencia amortiguada ωdFrecuencia natural no amortiguada ωn
Constantes de error Kp, Kv, Ka
1. Análisis de Requisitos
Requisitos del sistema de control (II)• Las técnicas basadas en el LDR emplearán especificaciones del dominio temporal (MP,
tr, ts)• En frecuencia se suele usar fundamentalmente el margen de fase y la frecuencia de
cruce de ganancia.• Sin embargo como es de esperar tanto uno como otro hacen referencia al mismo
sistema, y sus valores están relacionados• Los Márgenes de estabilidad, nos ayudan a establecer relaciones con el
comportamiento en cadena cerrada.

5
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
1. Análisis de RequisitosRequisitos del sistema de control (III)• Relaciones entre los parámetros de sistemas de segundo orden

6
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
2. Tipos de reguladores
Control por realimentación• Sistema en cadena abierta: más preciso, estable, rápido, raramente oscilatorio…• Sistema en cadena cerrada: aparece el error, inestabilidades, oscilaciones, lento…• ¿Por qué realimentamos los sistemas?
6
El sistema corrige la acción de control en base a la observación de la variable quese quiere controlar.
Hace frente a las perturbaciones tanto previsibles como imprevisibles.

7
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
2.Tipos de reguladores
Control On‐Off• Sistema de control realimentado más
sencillo.• No hay ajuste alguno de parámetros.
Funciona sólo entre dos estados de la variable de control:
si e>0 u = umáx.si e<0 u = umín
• Objetivo: permanecer cerca de la consigna.• Inconveniente: la variable de proceso puede
oscilar; las conmutaciones de u pueden deteriorar los actuadores.
• Modificaciones: incluir zonas muertas, histéresis (0.5 2% del rango máximo)
• Control de nivel de depósitos de agua
7
8
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
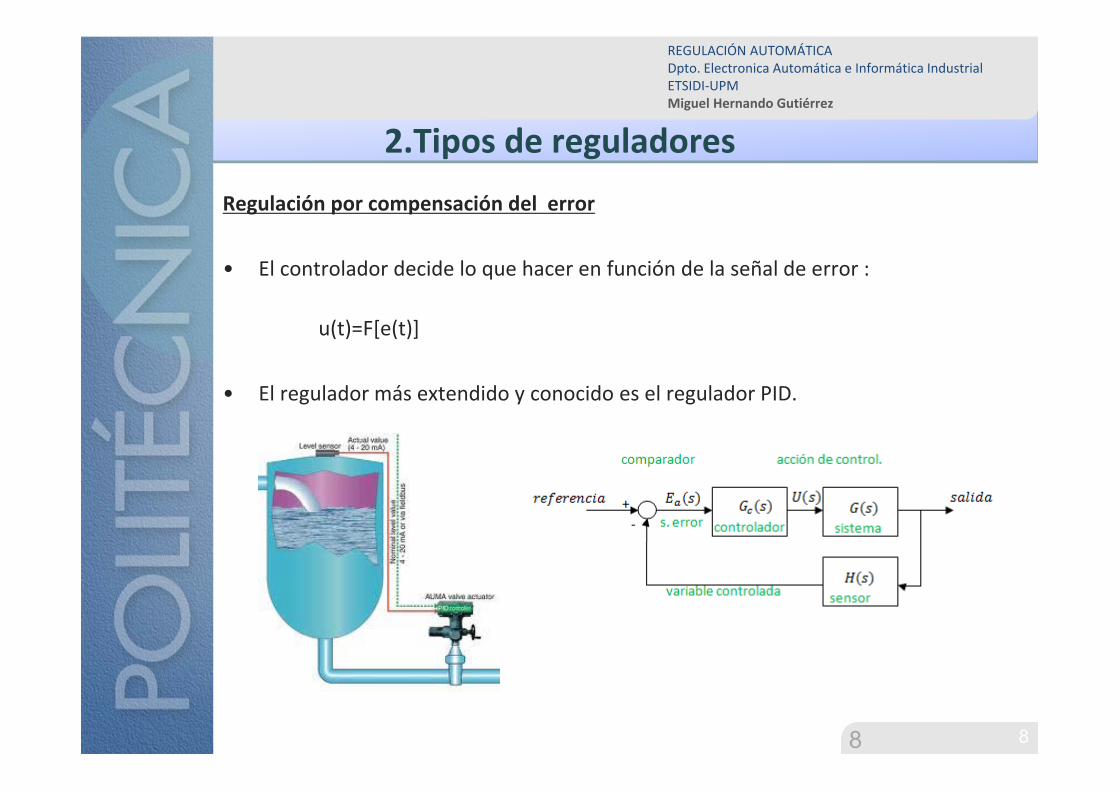
Regulación por compensación del error
• El controlador decide lo que hacer en función de la señal de error :
u(t)=F[e(t)]
• El regulador más extendido y conocido es el regulador PID.
8
2.Tipos de reguladores

9
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
Compensación anticipativa
• Trata de adelantarse en su acción correctora al ser capaz de medir las perturbaciones.
• La perturbación debe ser medible• Se combina con la compensación por realimentación
9
2.Tipos de reguladores

10
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
Normal-butano
Iso-Butano
Purgador de condensado
FT
FC
sp
AT
LT LC
LT LCsp
ACFC
sp
sp
FT
spFC
FT
LL
vaporAliment.
AC
F
ReflujoAliment.
AT
LLF
FC
FT
FC
FT
Sistemas reales de controlEstas y otras estructuras se combinan en distintos o el mismo nivel.
2. Tipos de reguladores

11
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
3. El regulador P y el lugar de las raícesAnálisis estático de la acción proporcional ante perturbaciones (I)
l: perturbación de carga (de entrada)n: perturbación en la medida (ruido)KcKp: Ganancia de lazo
11
BlnyAlKK
Kny
KKKK
xyyKu
luKxnxy
refpc
pref
pc
pc
refc
p
)(
1)(
1)(
)(

12
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
3. El regulador P y el lugar de las raícesAnálisis estático de la acción proporcional ante perturbaciones (II)Si n=0:
Interesa A=1 y B=0
Si n<>0 el ruido es tan importante como la referencia
Regla importante: la calidad de los sensores y el aislamiento de las señales demedida es muy importante para hacer un buen sistema de control.
12
BlAylKK
Ky
KKKK
x refpc
pref
pc
pc
11

13
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
2. El regulador P y el lugar de las raícesEl lugar de las raícesEfectos Dinámicos:
K=1,2 y 5 de forma sucesiva.
13
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
tiempo
salid
a
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
40.160.340.50.64
0.76
0.86
0.94
0.985
0.160.340.50.64
0.76
0.86
0.94
0.985
0.5
1
1.5
2
2.5
3
3.5
0.5
1
1.5
2
2.5
3
3.5
Root Locus Editor for Open Loop 1 (OL1)
Real Axis
Imag
Axi
s
+ ‐
𝐺 𝑠 𝑌 𝑠
𝐸𝑎 𝑠 𝑋 𝑠
𝐻 𝑠
𝐾 𝑈 𝑠

14
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
2. El regulador P y el lugar de las raícesEl lugar de las raíces
14
>> g=tf(1, poly([‐1 ‐1 ‐1]))Transfer function:
1‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐s^3 + 3 s^2 + 3 s + 1>> rltool(g)

15
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
3. El regulador P y el lugar de las raíces
• La acción proporcional tiene efectos sobre el régimen transitorio ypermanente, normalmente aumentar K:o tiende a reducir el error en régimen permanente.o tiende a aumentar las oscilaciones en la variable de proceso.
• Elevada ganancia hace el sistema insensible a variaciones de carga, pero por elcontrario, lo hace más sensible al ruido.
• Solo un grado de libertad para controlar más de una especificación.
15

16
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
4. El regulador PID
Al algoritmo de control PIDEs el controlador por excelencia, se compone de tres acciones, Proporcional,
Integral y Derivativa.
16
t
di dt
tdETdET
tEKtU0
)()(1)()(
sTsTsTT
KsTsT
KsEsU
i
idid
i
1)11(
)()( 2
¡NO CAUSAL!

17
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
La acción Integral • Se fija en el pasado para decidir que hacer.• Incremento notable de la inercia del sistema• Hace al sistema preciso, pero debe ser suave o el sistema se hace oscilatorio• Mayor Ti , más suave la acción.
Ti= 3, 1, 0.5 y 0.2
17
11)(
s
sG
4. El regulador PID

18
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
La acción derivativa • Genera una señal proporcional a la derivada del error• Debe ir combinada con la acción proporcional, de la forma:
• Se ajusta mediante el parámetro Td tiempo derivativo.• Tiene efecto sobre el régimen transitorio, mejorando la estabilidad.
18
4. El regulador PID
dttdeTteKtu d)()()(
)1()()()( sTK
sesusG dcc
e(t)
t t+dt
ê(t+dt)
señal de error e(t)
19
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
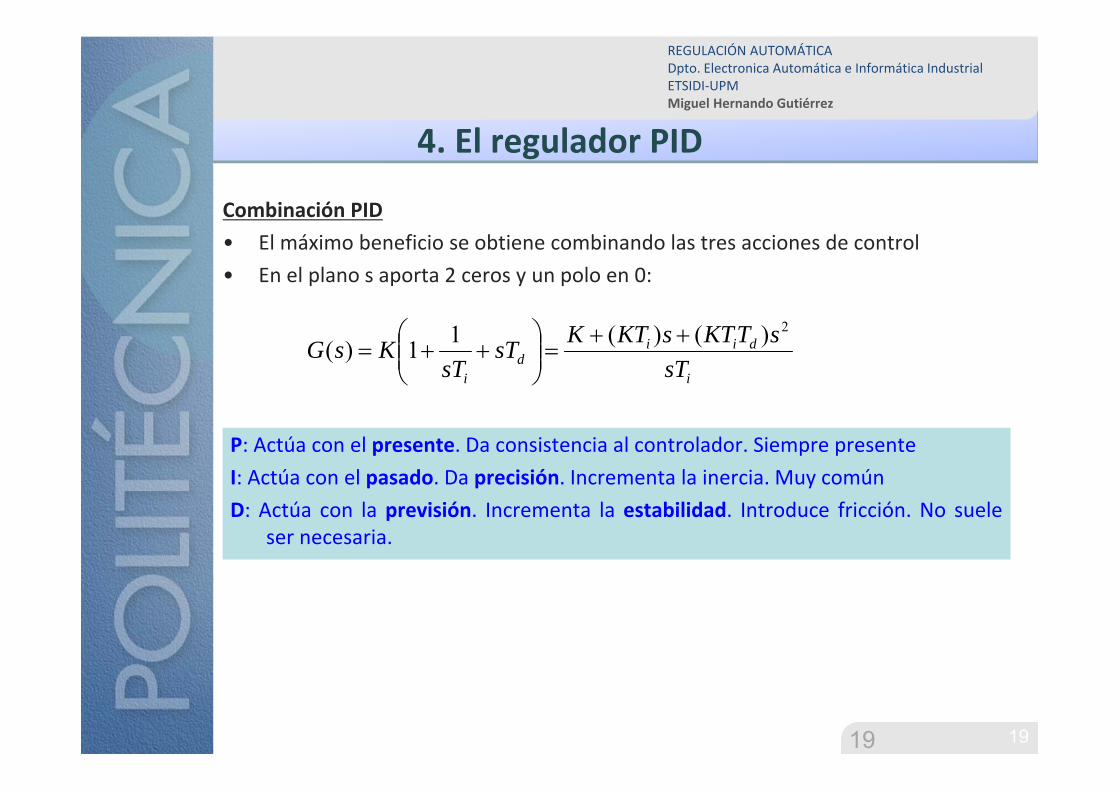
Combinación PID• El máximo beneficio se obtiene combinando las tres acciones de control• En el plano s aporta 2 ceros y un polo en 0:
19
P: Actúa con el presente. Da consistencia al controlador. Siempre presenteI: Actúa con el pasado. Da precisión. Incrementa la inercia. Muy comúnD: Actúa con la previsión. Incrementa la estabilidad. Introduce fricción. No suele
ser necesaria.
i
diid
i sTsTKTsKTKsT
sTKsG
2)()(11)(
4. El regulador PID

20
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
Metodologías de diseño de controladores
Métodos empíricos o heurísticos– Se basan en experimentos– Son “recetas” que a veces dan buenos resultados– los más característicos son los de Ziegler‐Nichols (1944)
Métodos analíticos – Se basan en las propiedades analíticas del sistema– Parten de un modelo de la planta– Normalmente llegan a un primer diseño que luego hay que refinar– Lugar de las raíces– Métodos de optimización– Métodos adaptativos
4. El regulador PID

21
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
Ajuste de Ziegler‐Nichols (I)• Se basan en el ensayo en cadena abierta ante entrada escalón. Esta respuesta se
denomina como “curva de reacción del proceso”.
• Debe tener forma de “S” (2º orden sobreamortiguado).• Con la respuesta se determinan K, el retraso L y la constante de tiempo T.• Con esos valores se calcula Kc Ti y Td según una tabla
21
4. El regulador PID: ajuste empírico
Controlador K Ti Td
P 1/a - -
PI 0.9/a 3,3L -
PID 1.2/a 2L L/2
Controlador K Ti Td
P T/(KeL) - -
PI 0.9T/(KeL) 3,3L -
PID 1.2T/(KeL) 2L L/2TLK
TALy
a e
Uin
)(
P la n ta u (t) y ( t)

22
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
4. El regulador PID : ajuste empírico
Ajuste de Ziegler‐Nichols (I)• Este método de ZN proporciona buena respuesta ante cambios de carga.• Criterio de diseño: consiguen una razón de decrecimiento de 1/4, lo que da un = 0.22 (muy
subamortiguado Mp=50%). Entre la primera sobreoscilación y la segunda se reduce el pico al 25%.
• Ante cambios de consigna la salida puede no responder de forma óptima, generalmente de pobre amortiguación.
• Si no cumple los requisitos, REAJUSTAR.• Se basa en modelizar la respuesta mediante un sistema de primer orden con retardo:
22
Tiempo(sec.)
Ampl
itud
0 1 2 3 4 5 60
0.5
1
1.5
d 0.25
d
K
L T
Modelo
Planta
1)()(
Ts
LsKsusy e
ZN1.mdl

23
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
4. El regulador PID : ajuste empírico
Ejemplo:Diseñar con Matlab un regulador PID mediante Ziegler‐Nichols para el sistema
cuya función de transferencia es la siguiente :
23
)3)(2)(1(1)(
ssssG
>>gs=tf(1,poly([‐1,‐2,‐3])>>step(gs)
Time (sec.)
Am
plitu
de
Step Response
0 1 2 3 4 5 60
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18From: U(1)
To: Y
(1)
0,4 2,8
K=0,165L=0.4 sec.T=2.8-0.4=2.2 sec.
s
sss
Gc
25,225,82,08,01125,41
TABL
A

24
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
4. El regulador PID : ajuste empírico
24
)3)(2)(1(1)(
ssssG
s
sss
Gc
25,225,82,08,01125,41
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1-3
-2
-1
0
1
2
3
Real Axis
Imag
Axe
s
Lugar de las raíces
0 1 2 3 4 5 6 7 8 0 0.2 0.4 0.6 0.8 1
1.2 1.4 1.6

25
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
Ajuste de Ziegler‐Nichols (II) (Ganancia crítica)• Se basan en el ensayo en cadena cerrada con controlador P.• Variar K hasta mantener oscilación en la salida.• Medir periodo de oscilación To y ganancia Ko
25
4. El regulador PID : ajuste empírico
Time (sec.)
Am
plitu
de
Step Response
0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2From: U(1)
To: Y
(1)
To
Controlador K Ti Td
P 0.5Ko - -
PI 0.4Ko 0.8To -
PID 0.6Ko 0.5To 0.125To
ZN2.mdl

26
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
Ajuste de Chien-Hrones-Reswick
• Variante del método de ZN.• Criterio de diseño:
o Rápida respuesta con 20% de sobreoscilación.o Rápida respuesta con 0% de sobreoscilación.
• Ajuste de parámetros distintos para cambios de carga o cambios de SP.• Para cambios de carga: uso de parámetros a y L.• Para cambios de SP: uso de parámetros a, L y T.• Consigue un 0% de sobreoscilación disminuyendo el valor de K y Td y aumentando el valor de Ti con
respecto al método de ZN, es decir, la acción proporcional, integra y derivativa son más pequeños.
4. El regulador PID : ajuste empírico

27
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
Ajuste de Chien-Hrones-Reswick• Parámetros controlador para situaciones de cambio de carga:
• Parámetros controlador para situaciones de cambio de referencia:
Sobreoscilación 0% 20%
Controlador K Ti Td K Ti Td
P 0.3/a - - 0.7/a - -
PI 0.6/a 4L - 0.7/a 2.3L -
PID 0.95/a 2.4L 0.42L 1.2/a 2L 0.42L
Sobreoscilación 0% 20%Controlador K Ti Td K Ti Td
P 0.3/a - - 0.7/a - -PI 0.35/a 1.2T - 0.6/a T -PID 0.6/a T 0.5L 0.95/a 1.4T 0.47L
4. El regulador PID : ajuste empírico
chr.mdl

28
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
5.‐ Realización Digital
La realización digital conlleva tres efectos importantes:1.- Efecto del muestreo2.- Discretización3.- Cuantificación
28
Regulador ) ( zR Bloqueador ) (sB
Convert idor Digital-Analógico
Convertidor Analógico-Digital
T
)( sG
) ( sH
Computador
) ( sY

29
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
5.‐ Realización Digital
5.1 El muestreo. Filtro antialiasing (1).• Proceso de un controlador digital:
1. Esperar a la interrupción de reloj (tiempo real)2. Lectura de la señal analógica (CAD)3. Cálculo de la acción de control4. Escritura de la señal analógica (CDA)5. Actualización de las variables del controlador6. Volver a 1.
• Durante todo un ciclo la señal muestreada se considerainvariante.
• Efecto del muestreo: aparición de alias.
29

30
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
5.‐ Realización Digital
5.1 El muestreo. Filtro antialiasing (2)..
30
Time (sec.)
Ampl
itude
Step Response
0 5 10 15 20 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8 From: U(1)
To: Y
(1)

31
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
5.‐ Realización Digital
5.1 El muestreo. Filtro antialiasing (3)..
31

32
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
5.‐ Realización Digital
5.1 El muestreo. Filtro antialiasing (3).• El efecto de aliasing: aparición de una falsa señal de baja frecuencia
como consecuencia del submuestreo. • Producidas por señales que superen la frecuencia de Niquist
(TªShanon). Wn=0.5Ws• Solución: filtro analógico antes de muestrear.
o Se suele usar uno de 2º Orden (Butterworth) con ancho de banda al menos de 1/8 de lafrecuencia de muestreo.
32

33
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
5.‐ Realización Digital
5.2 Discretización (1).• ¿Cómo se realiza con un algoritmo un cálculo del tipo PID?.
o Existen distintas transformaciones. La mas utilizada es la de Tustin o bilineal, la cual sebasa en aproximar la integración por:
33
)(tx
T 2T 3T kT t
)(tx t
dttx0
)( kx kws1
)1()1(
2 1
1
zzT

34
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
5.‐ Realización Digital
5.2 Discretización (2).
34

35
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
5.‐ Realización Digital
5.3 Cuantificación (1).
o Un ordenador tiene una precisión finita.o Codificación de números reales:
Coma fija: Coma flotante
o 32 bitso 64 bits
o Una precisión excesiva puede provocar que el cálculo acumulativo salga mal:
o Un ejemplo particular buscado a conciencia:
o Habitualmente quien es problemático es el término integral. Se puede arreglar ajustandosu muestreo con un periodo mayor, para que el valor que se incrementa sea significativo.
35
36
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
6.‐ Notas Prácticas sobre el PID
Notas prácticas de uso del PID
• Empleo del PID:seguimiento fiable de los cambios de SP.insensibilidad al ruido.Buen comportamiento ante cambios de carga,perturbaciones.
• El PID funciona, en la mayoría de los casos,aceptablemente.
• En muchas implementaciones la acción D se desconecta.
• ¿ Cuándo emplear configuración PI ?En sistemas principalmente de 1er orden (control de nivel)En sistemas de orden superior siempre acción I paraasegurar correcto funcionamiento en régimenpermanente.
36

37
REGULACIÓN AUTOMÁTICADpto. Electronica Automática e Informática IndustrialETSIDI‐UPMMiguel Hernando Gutiérrez
6.‐ Notas Prácticas sobre el PID
Notas prácticas de uso del PID
• ¿Cuándo emplear configuración PID ?En sistemas principalmente de 2º orden (control de temperatura).En sistemas donde haya que incrementar la velocidad de respuesta y en sistemasde orden superior, mediante la adición de la acción D.
• ¿ Cuándo no usar PID ?
En sistemas de orden 3 o superior (control más sofisticado, el PID no basta, peropuede usarse).En sistemas con elevados tiempo muertos (predictor Smith).En sistemas con mas de un modo oscilatorio más de un polo complejo con partereal muy pequeña (adición de ceros complejos).
37
Top Related