





Idiomas
Páginas
Jurídico


Sofía Guerra 05-38287
1
Universidad Simón Bolívar
Departamento de Conversión y Transporte de Energía
Autor: Sofía Guerra. Carné: 05-38287
Profesor: J. M. Aller
Tarea 2
Máquinas Eléctricas III
CT-4311
Determine el lugar geométrico de una máquina sincrónica de polos salientes incluyendo el efecto de la saturación, a partir de datos suministrados por un fabricante. Utilice un programa en algún entorno de su preferencia (Mathematica, MathCad, Octave, Matlab, Fortran, C++, etc). Indique en este diagrama:
1. Punto nominal 2. Potencias activas y reactivas 3. Fuerzas electromotrices máximas y mínimas 4. Ángulos de carga máximos 5. Área de operación en corriente de armadura, potencia aparente y fuerza
electromotriz
Notas:
1. Los ejemplos utilizados deben ser individuales, así como los programas 2. Deberá entregar el programa, los gráficos obtenidos y el catálogo donde
obtuvo los datos de la máquina sincrónica de polos salientes 3. Deberá reportar una descripción de los resultados obtenidos
Solución
La máquina a utilizar es una máquina sincrónica de polos salientes:
Figura 1. Tipos constructivos de máquinas síncronas. Extraída de [2] Las posibles condiciones de operación de la máquina sincrónica circunscriben las diferentes variables que definen su comportamiento, en ciertos rangos y figuras geométricas cuando se representan gráficamente.

Sofía Guerra 05-38287
2
Los Datos de Placa de la máquina a utilizar para la realización de la tarea, los cuales fueron extraídos del paper “Virtual Laboratory for Study of Synchronous Machine Parameters”, son los siguientes: Generador Sincrónico con: SN=440MVA UN=6300V n1=1000rpm f1=50Hz p=3 cosφN=0.8 ind. Los parámetros de la máquina son: Reactancia del eje de directo xd = 1.4 Reactancia del eje de cuadratura xq= 0.8 Los valores anteriores para las reactancias exceden los rangos típicos para las reactancias de una máquina de polos salientes y rotor liso los cuales son para la reactancia del eje directo 0.8 < xd < 1.2 pu mientras que para la reactancia del eje de cuadratura están comprendidas normalmente entre 0.4 < xq < 0.7. Como se debe determinar el lugar geométrico de la máquina sincrónica de polos salientes incluyendo el efecto de la saturación se asumirá que la reactancia de dispersión es de Xσ = 0.15 en por unidad. Por otro lado, se asumirá también que la prueba de vacío de la máquina utilizada para la realización de esta tarea es la curva que se puede apreciar en los anexos, gráfica que se llevo a valores en por unidad, para posteriormente obtener mediante la regresión lineal la ecuación de la misma. Los puntos que se tomaron de la curva de vacío dada fueron los siguientes, también se incluye en la tabla los puntos llevados a por unidad utilizando las bases de la máquina a la cual corresponde dicha curva, entonces: Bases de la máquina: Voltaje = 13200V Corriente = 918 A

Sofía Guerra 05-38287
3
Tabla 1. Valores de la curva de característica de vacío en real y en por unidad
Corriente [A] Tensión [V] Corriente [p.u.] Tensión [p.u.]
0 0 0 0
12.5 100 0.0628 0.0758
25 200 0.1256 0.1515
37.5 270 0.1884 0.2045
50 350 0.2513 0.2652
62.5 450 0.3141 0.3409
75 540 0.3769 0.4091
87.5 630 0.4397 0.4773
100 710 0.5025 0.5379
112.5 800 0.5653 0.6061
125 890 0.6281 0.6742
137.5 970 0.6910 0.7348
150 1050 0.7538 0.7955
162.5 1130 0.8166 0.8561
175 1210 0.8794 0.9167
187.5 1270 0.9422 0.9621
200 1330 1.0050 1.0076
212.5 1390 1.0678 1.0530
225 1450 1.1307 1.0985
237.5 1480 1.1935 1.1212
250 1520 1.2563 1.1515
262.5 1560 1.3191 1.1818
275 1590 1.3819 1.2045
287.5 1630 1.4447 1.2348
300 1650 1.5075 1.2500
312.5 1680 1.5704 1.2727
325 1700 1.6332 1.2879
337.5 1730 1.6960 1.3106
350 1750 1.7588 1.3258
362.5 1770 1.8216 1.3409
375 1790 1.8844 1.3561
387.5 1810 1.9472 1.3712
400 1830 2.0101 1.3864
Luego de obtener estos valores se procedió a la graficación de los mismos en el programa Excel, donde se utilizó la herramienta de la curva de tendencia polinomial para obtener así la ecuación de la gráfica, entonces:

Sofía Guerra 05-38287
4
Característica de vacío de la máquina síncrona en por unidad
y = -0.1707x6 + 1.0396x
5 - 2.2392x
4 + 1.9286x
3 - 0.7258x
2 + 1.1704x + 0.0031
R2 = 0.9999
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 0.5 1 1.5 2 2.5
if
V
Figura 2. Característica de vacío de una máquina sincrónica.
Como se puede apreciar la ecuación presentada en el gráfico es la siguiente:
0031.01704.17258.09286.12392.20396.11707.0 23456++−+−+−= xxxxxxy
donde y = Ef y x =if.
0031.01704.17258.09286.12392.20396.11707.0 23456++−+−+−= ififififififEf
Seguidamente, luego de obtener la ecuación de la gráfica en por unidad, se procede a derivarla para así obtener la característica lineal de la misma cuando if=0. La expresión queda de la siguiente manera:
1704.14516.17858.59568.81980.50242.1 2345+−+−+−= ifififififEf
La expresión que rige la característica de linealidad es la siguiente:
ifEf 1704.1=
Las gráficas obtenidas fueron las siguientes, al realizar un barrido de factores de potencia a S nominal, también para P constante, así como para Efmáxima, para obtener los lugares geométricos de las corrientes y fuerza electromotriz (Gráfico 1) y potencias activas y reactivas con todas las limitaciones de la máquina (Gráfico 2). A saber:

Sofía Guerra 05-38287
5
Gráfico 1
Grafico 2

Sofía Guerra 05-38287
6
El lugar geométrico general de la máquina sincrónica de polos salientes con saturación viene dado por:
Figura 3. Diagrama Fasorial de la máquina sincrónica con saturación Se indicarán a continuación cada uno de los puntos de la tarea de manera detallada:
1.- Punto Nominal
Figura 4. Punto Nominal de la máquina sincrónica con saturación
Sofía Guerra 05-38287
7
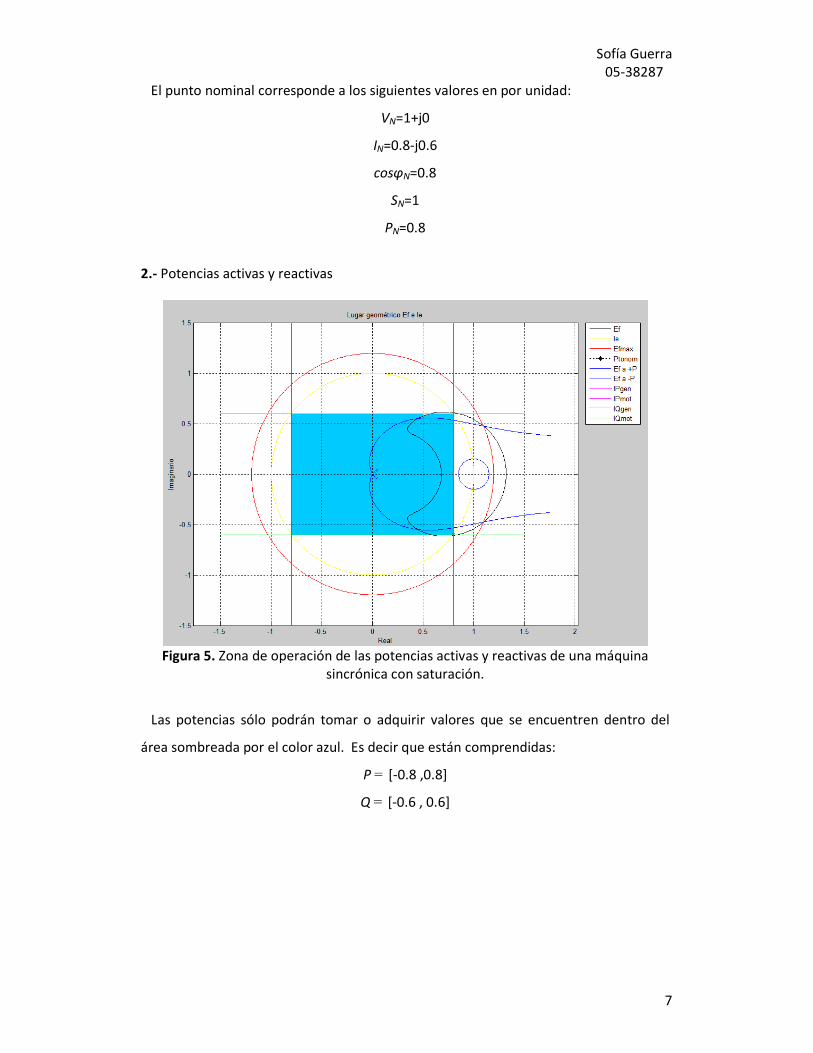
El punto nominal corresponde a los siguientes valores en por unidad:
VN=1+j0
IN=0.8-j0.6
cosφN=0.8
SN=1
PN=0.8
2.- Potencias activas y reactivas
Figura 5. Zona de operación de las potencias activas y reactivas de una máquina
sincrónica con saturación.
Las potencias sólo podrán tomar o adquirir valores que se encuentren dentro del
área sombreada por el color azul. Es decir que están comprendidas:
P = [-0.8 ,0.8]
Q = [-0.6 , 0.6]

Sofía Guerra 05-38287
8
3.- Fuerzas Electromotrices máximas y mínimas
Figura 6. Fuerzas electromotrices de la máquina sincrónica con saturación
La fuerza electromotriz máxima ocurre en el punto nominal, debido a que en ese punto la corriente de campo corresponde a la máxima. Efmax=1.097+j0.4745 pu |Efmax|=1.1952 pu La fuerza electromotriz mínima es cuando la potencia eléctrica es igual a la potencia mecánica. Por lo que es hallado gráficamente, por tanto su valor será el siguiente: Efmax=0.8+j0.612 pu |Efmax|=1.0072 pu
4.- Ángulos de carga máximos.
Para obtener el ángulo de carga máximo se acudió a la fórmula, que puede ser apreciada en el capítulo 8 de [1].
−−+
−=
eqd
fq
eqd
fq
VXX
EX
VXX
EX
)(42
1
)(16arccos
22
22
maxδ
El mismo dio como resultado:
δmax=63.3587

Sofía Guerra 05-38287
9
5.- Área de operación en corriente de armadura, potencia aparente y fuerza electromotriz. A través de los gráficos anteriores se pueden identificar las regiones posibles de operación de la máquina que aseguran el funcionamiento de la máquina dentro de los límites operacionales. Las regiones posibles de operación aparecen rellenadas en color azul en los siguientes gráficos:
Figura 7. Área de Operación de la máquina sincrónica con saturación
Otra manera de ver la zona de operación de la máquina es observando el diagrama PQ, que se muestra a continuación (S=P+jQ posibles)
Figura 8

Sofía Guerra 05-38287
10
Descripción de los resultados obtenidos
No todo es posible como se puede apreciar en las ecuaciones para la máquina sincrónica, hay muchas limitaciones que van ocurriendo durante la operación de la misma y ahora se le agrega el efecto de la saturación. Cuando el material magnético de una máquina se satura, la relación entre la corriente del campo y el enlace de flujo que esta corriente produce ya no es lineal. Como la reactancia del eje cuadratura no se satura debido a que su entrehierro es mucho más grande que el correspondiente al eje directo, es posible obtener la posición de estos ejes directamente. Por otro lado la posición de la fuerza electromotriz detrás de la reactancia de dispersión Ee es necesaria para la determinación del valor de Eq que define el grado de saturación a través de la característica de vacío de la máquina. Las fuerzas magnetomotrices de los ejes directo y cuadratura no se pueden sumar porque están aplicadas sobre caminos magnéticos diferentes, con reluctancias diferentes. Si excedemos la corriente nominal o corriente del estator lo que le pasa a la maquina normalmente es que se caliente y en régimen permanente si se mantiene la temperatura por encima se dañará, debido a que la máquina no puede trabajar con corrientes mayores a esa corriente nominal. Eso nos permitiría trabajar en una especie de circulo en el cual en cualquier punto del circulo podríamos tener corrientes inferiores a la corriente nominal y no seria nada malo. Nos define un determinado recorrido. Tiene una implicación inmediata en la maquina sincrónica que la tensión que produce una caída, si esta caída es la máxima se produce un segundo círculo con la dimensión de la caída ya la maquina no solo tiene una limitación de corriente de armadura, si no que este nuevo circulo nos da las fuerzas electromotrices de campo, no podemos tener la fuerzas electromotrices que queramos todas deben estar dentro de este lugar geométrico. Como Ef es proporcional a la corriente de campo no podemos colocarle a la máquina cualquier corriente de campo si no que se debe colocar la corriente adecuada que este dentro de la nueva zona de operación, solamente corrientes de campo que tengan que ver con estas fuerzas electromotrices va a poder funcionar para la máquina. En general las máquinas tienen un punto conocido como el punto nominal, en este tenemos la corriente nominal, la tensión nominal junto con el factor de potencia, la proyección de esta corriente sobre este punto multiplicado por la tensión será proporcional a la potencia nominal, normalmente este será el valor de la turbina que se le coloca al generador, nunca se podrá trabajar a mas allá de esta zona, se tendrá una característica de las corrientes que no pueden proyectar mas allá de la recta. Lo que realmente define el punto nominal de la máquina sincrónica es la corriente de campo máxima, es decir este punto termina identificando la corriente de campo máxima que es la corriente con la que se consigue el factor de potencia máximo de la máquina. La corriente de campo nominal es aquella corriente que en vacío produzca la tensión nominal de armadura ya que cuando se quiere sincronizar la máquina se debe saber la corriente que se necesita en el campo para que cuando la maquina este girando a velocidad sincrónica se pueda tener la misma tensión en la red que en la máquina. Cuando se coloca la máquina en tensión nominal, factor de potencia nominal y la corriente nominal y en ese momento se calcula la corriente de campo, la fuerza electromotriz es máxima y corresponde a la corriente de campo máxima, mientras la Ef que corresponde a la tensión nominal corresponde a la corriente nominal de campo.

Sofía Guerra 05-38287
11
Si se observa el lugar geométrico obtenido para la Asignación numero 1, se tendrá lo siguiente:
(a) (b)
Figura 9. Lugar geométrico para la máquina sin saturación (a) y con saturación (b) Se puede apreciar que al existir saturación el área de operación se reduce en comparación al lugar geométrico de la máquina sin saturación. Por otro lado las fuerzas electromotrices disminuyen debido a la saturación que presenta el sistema. Se traducen estas limitaciones a limitaciones sobre las corrientes de armadura de la máquina. Si se puede entregar tanta P o tanta Q con la máquina pueda, en el modelo P-Q se tiene una característica de la máquina y la zona en que la máquina puede entregar esa potencia. El punto de Potencia reactiva máxima (Qmax) va a depender del punto de operación que se tenga, desde el punto nominal en adelante se puede ir subiendo En la máquina de polos salientes con el punto nominal vamos a obtener el vector D y el y la corriente de campo máximo que define directamente el punto de la Fuerza Electromotriz máxima, cuando la corriente se mueve alrededor del círculo, formando como se puede apreciar en el Figura 9 (a) una especie de “Lenticata” donde esta será la zona de operación, que es lo que se esperaba al trabajar con una máquina sin saturación y a su vez porque se esta trabajando con una máquina sincrónica de polos salientes. El punto nominal es el punto crítico donde empieza a salirse y por eso toma esta forma de “ala de mariposa”. Si se observa Figura 9 (b), al existir la saturación la forma de la “Lenticata” desaparece, y se observa una especie de media luna, la abertura de dicha luna se deberá al grado de saturación al que este sometida la máquina, luego de probar con diferentes valores, se pudo apreciar que para grados de saturación mayores esa abertura será mayor, y viceversa cuando el grado de saturación sea menor se podrá apreciar una forma un poco mas circular.

Sofía Guerra 05-38287
12
El algoritmo utilizado para obtener las gráficas anteriores aparece a continuación y se implemento en el programa MATLAB. %Lugar Geométrico de una Máquina Sincrónica de polos salientes
incluyendo %el efecto de la saturación
%Datos nominales de la máquina en por unidad Van = 1; Ien = 1; San = 1; CosFin = 0.8;
%Parámetros de la máquina en por unidad Xd = 1.4; Xdisp = 0.15; Xq = 0.8; Re = 0.0;
Fi = 0:-.01:-2*pi; % Vector de factores de potencia Ie = Ien*(cos(Fi)+j*sin(Fi)); % Vector de corrientes de armadura
nominal a diferentes fp D = Van + (Re+j*Xq).*Ie; % Vector D para cada corriente Ee = Van+i*(Xdisp*Ie); % Posición de la fuerza electromotriz detrás de
la reactancia de dispersión AbsEe=abs(Ee); CosPhases=cos(phase(D)-phase(Ee))'; Eq = AbsEe*CosPhases; % Fuerza electromotriz que define el grado de
saturación a traves de la caracteristica de vacio iflin=Eq/1.1704; ysat=-0.1707*x^6+1.0396*x^5-2.2392*x^4+1.9286*x^3-
0.7258*x^2+1.1704*x+0.0031; ifsat = fsolve(x,ysat); s = ifsat/iflin; %Grado de saturación Xdsat=(Xd/s)+((1-s)/s)*Xdisp; %Reactancia del eje directo incluyendo
la saturación delta = atan2(imag(D),real(D)); % Vector de ángulo de carga para cada
corriente Idn = Ien*sin(delta-Fi).*(sin(delta)-j*cos(delta)); % Cálculo de la
corriente Id Ef = D + j*(Xdsat-Xq).*Idn; % Cálculo de la fuerza electromotriz
P = abs(Ef)*Van.*sin(delta)/Xdsat+Van^2*(Xdsat-
Xq)*sin(2*delta)/(2*Xdsat*Xq); % Cálculo de la potencia activa Q = abs(Ef)*Van.*cos(delta)/Xdsat-
Van^2*(Xq*cos(delta).^2+Xdsat*sin(delta).^2)/(Xdsat*Xq); % Cálculo de
la potencia reactiva S = P+j*Q; % Potencia aparente
%Cálculo de la fuerza electromotriz Ef en el punto nominal %Ef posibles Fin = acos(CosFin); Iex = Ien*(cos(Fin)-j*sin(Fin)); Dx = Van + (Re+j*Xq)*Iex; Eex = Van+i*(Xdisp*Ie); AbsEex=abs(Eex); CosPhasesx=cos(phase(Dx)-phase(Eex))'; Eqx = AbsEex*CosPhasesx; % Fuerza electromotriz que define el grado de
saturación a traves de la caracteristica de vacio iflinx=Eqx/1.1704;

Sofía Guerra 05-38287
13
ysatx=-0.1707*x^6+1.0396*x^5-2.2392*x^4+1.9286*x^3-
0.7258*x^2+1.1704*x+0.0031; ifsatx = fsolve(x,ysatx); sx = ifsatx/iflinx; %Grado de saturación deltax = atan (imag(Dx)/real(Dx)); Idx = Ien*sin(deltax+Fin).*(sin(deltax)-j*cos(deltax)); Efx = Dx + j*(Xdsat-Xq).*Idx; Efmax = abs(Efx)*(cos(Fi)+j*sin(Fi)); %Magnitud de la fuerza
electromotriz máxima para cada Fi Pefmax=abs(Efx)*Van.*sin(delta)/Xdsat+Van^2*(Xdsat-
Xq)*sin(2*delta)/(2*Xdsat*Xq); %Potencia activa para Efmáx Qefmax=abs(Efx)*Van.*cos(delta)/Xdsat-
Van^2*(Xq*cos(delta).^2+Xdsat*sin(delta).^2)/(Xdsat*Xq); %Potencia
reactiva para Efmáx Sefmax=Pefmax+j*Qefmax; %Potencia aparente a Efmáx para cada Fi Ptonom=(real(Iex)+i*imag(Iex)); y=-1.5:0.001:1.5; IPgen=real(Iex); IPmot=-IPgen; y1=-1.5:0.001:1.5; IQgen=imag(Iex); IQmot=-IQgen; %f=Van+(1i*Xq)*Ie;
%Gráfico de los lugares geométricos figure(1) plot(Ef,'k'),hold on,grid on; plot(Ie,'y'); plot(Efmax,'r'); plot(Ptonom,'k*:'); %plot(f); plot(Ee); axis('equal');
%S=P+jQ posibles Fi1 = -3.2*pi/8:0.01:3.2*pi/8; % Vector de posibles fp de operación P1=real(Iex); %Valor de Plímite Iemag1=P1./(cos(Fi1)); %Magnitud de Ie Ie1 = Iemag1.*(cos(Fi1)+j*sin(Fi1)); % Vector de corrientes de
armadura a Pconstante D1 = Van + (Re+j*Xq).*Ie1; % Vector de fasores D para cada corriente delta1 = atan2(imag(D1),real(D1)); % Vector de ángulos de carga para
cada Ie Id1 = Iemag1.*sin(delta1-Fi1).*(sin(delta1)-j*cos(delta1)); % Cálculo
de la corriente Id Ef2 = D1 + j*(Xdsat-Xq).*Id1; % Cálculo de la fuerza electromotriz
%Gráfico de corrientes de armadura y Ef a P=real(Iex) plot (Ef2,'b');
P2=-real(Iex); %Valor de Plímite Iemag2=P2./(cos(Fi1)); %Magnitud de Ie Ie2 = Iemag2.*(cos(Fi1)+j*sin(Fi1)); % Vector de corrientes de
armadura a Pconstante D2 = Van + (Re+j*Xq).*Ie2; % Vector de fasores D para cada corriente delta2 = atan2(imag(D2),real(D2)); % Vector de ángulos de carga para
cada Ie Id2 = Iemag2.*sin(delta2-Fi1).*(sin(delta2)-j*cos(delta2)); %Cálculo
de la corriente Id Ef3 = D2 + j*(Xdsat-Xq).*Id2; % Cálculo de la fuerza electromotriz
Sofía Guerra 05-38287
14
%Se incorporan al gráfico anterior los lugares geométricos de Ie y Ef
a P=-real(Iex) plot (Ef3,'b');
plot(IPgen,y,'m'); plot(IPmot,y,'m-.'); plot(y1,IQgen,'g'); plot(y1,IQmot,'g-.'); hold off; title('Lugar geométrico Ef e Ie') xlabel('Real') ylabel('Imaginario') legend('Ef','Ie','Efmax','Ptonom','Ef a +P','Ef a -
P','IPgen','IPmot','IQgen','IQmot','Location','NorthEastOutside')
%Se grafica ahora el lugar geométrico para las potencias S=P+j*Q a S
constante, Pconstante y Efmáx Q1=abs(Ef2)*Van.*cos(delta1)/Xdsat-
Van^2*(Xq*cos(delta1).^2+Xdsat*sin(delta1).^2)/(Xdsat*Xq); S1=P1+j*Q1; Q2=abs(Ef3)*Van.*cos(delta2)/Xdsat-
Van^2*(Xq*cos(delta2).^2+Xdsat*sin(delta2).^2)/(Xdsat*Xq); S2=P2+j*Q2;
figure(2) plot(S,'g'),hold on,grid on; plot(S1); plot(S2) axis('equal'); plot(Sefmax,'r'),hold off; title('Lugar geométrico P y Q') xlabel('P') ylabel('Q') axis([-1.5 1.5 -1.5 1.5]); % Escalas del gráfico en p.u.
Bibliografía: [1] Máquinas Eléctricas Rotativas. J. M. Aller. Edicion 2007. Editorial Equinoccio. [2] Máquinas Eléctricas. Jesús Fraile Mora. Sexta Edición 2008. Editorial Mc Graw Hill.

Sofía Guerra 05-38287
15
ANEXOS

Sofía Guerra 05-38287
16
Top Related