






Idiomas
Páginas
Jurídico

Tema 4. Modelos multivariantes recursivos. Variables
exógenas. Modelos uniecuacionales.
1. El Modelo VAR(p) estacionario. Causalidad en sentido de Granger.
2. Estimación de modelos VAR
3. Modelos VAR con variables exógenas. Modelo VAR recursivos.
4. Modelos uniecuacionales dinámicos: Multiplicadores de impacto y de largo plazo

1. Modelo VAR(p) estacionario.
Causalidad en sentido de Granger.
Objetivo: Describir las relaciones dinámicas entre dos o más variables económicas recogidas en el vector Wt de dimensión nx1.
La popularidad de los modelos VAR para modelizar sistemas dinámicos de variables económicas es debida a Sims (1980) que critica a los modelos econométricos estructurales.
Vamos a considerar, por ejemplo, el siguiente modelo para un sistema bivariante de dos variables:
Si intentamos estimar cada una de estas dos ecuaciones por MCO, los estimadores serán no consistentes dado que existe correlación entre los regresores y la perturbación.
ttttt
ttttt
uwwww
uwwww
212221121122
112121111211
+++=+++=
−−
−−
ααβααβ
][
)]([][
])[(][
212
1121211112112112
12122211211212
t
ttttttt
ttttttt
uE
uwwwwEuwE
uuwwwEuwE
βααβββ
ααβ=+++==
=+++=
−−
−−

El problema surge por una falta de identificación de las relaciones contemporáneas.
Una alternativa para poder estimar es restringir de forma adecuada los parámetros del modelo:
i) Imponer restricciones sugeridas por la Teoría Económica
ii) Trabajar con modelos de series temporales

Para esta segunda opción vamos a considerar la siguiente expresión alternativa del modelo anterior:
+
=
−−
−
−
t
t
t
t
t
t
u
u
w
w
w
w
2
1
12
11
2221
1211
2
1
2
1
1
1
αααα
ββ
ttt
ttt
ttt
WW
UBAWBW
UAWBW
ε+Φ=+=
+=
−
−−
−
−
11
11
1
1

Vamos a ver como son las perturbaciones del nuevo modelo:
La covarianza entre y solo será cero cuando
−=
−−
=
−
t
t
t
t
t
t
u
u
u
u
2
1
2
1
212
11
2
1
2
1
1
1
11
1
1
ββ
ββββ
εε
)(1
1
)(1
1
21221
2
21121
1
ttt
ttt
uu
uu
+−
=
+−
=
βββ
ε
βββ
ε
t1ε t2ε021 == ββ

En este último modelo la relación contemporánea aparece modelizada como covarianza entre las perturbaciones en lugar de aparecer explícitamente en el modelo. Se pierde la relación de causalidad.
El modelo VAR(p) viene dado por:
donde
y es una matriz simétrica definida positiva.
tptptt aWWCW +Φ++Φ+= −− ...11
≠Ω=
=
=
st
staaE
aE
st
t
,
,0)(
0)(
'
Ω

Ejemplo: Modelo VAR(1) para un sistema bivariante
Cada variable aparece regresada en su propio pasado y en el pasado de las demás variables. Todas las regresiones tienen las mismas variables explicativas.
+
=
−
−
t
t
t
t
t
t
a
a
w
w
w
w
2
1
12
11
2221
1211
2
1
φφφφ
tttt
tttt
awww
awww
2122211212
1121211111
++=++=
−−
−−
φφφφ

En un modelo VAR las relaciones contemporáneas entre las variables del sistema se recogen en la matriz .Dichas relaciones no representan relaciones de causalidad.
Cuando no hay relaciones contemporáneas entre las variables e
Ω
=Ω
2212
1221
σσσσ
012 =σtw1 tw2

El modelo VAR(p) puede escribirse alternativamente como
El modelo es estacionario si las raíces de la ecuación son estrictamente mayores que uno en módulo.
El modelo VAR(p) puede estimarse consistentemente ecuación por ecuación. Si hay un componente de MA, la estimación debe realizarse por MV.
ttp
p aCWLLI +=Φ−−Φ− )...( 1
0|...| 1 =Φ−−Φ− pp xxI

Ejemplo:
+
=
−
−
t
t
t
t
t
t
a
a
w
w
w
w
2
1
12
11
2
1
3.08.0
2.05.0
−−−−
=Φ−xx
xxxI
3.018.0
2.05.011
221 01.08.0116.0)3.01)(5.01(|| xxxxxxI −−=−−−=Φ−
001.08.01 2 =−− xx
−
=23.1
23.81x
Causalidad en sentido de Granger
En un sistema bivariante, la variable no causa ala variable en el sentido de Granger si para todo s>0, el error cuadrático medio (ECM) de la predicción de dado es el mismo que el ECM de la predicción de dado
La causalidad en el sentido de Granger es mejor interpretarla en el sentido de predicción que en el de causalidad propiamente dicha.
tw1
tw2
stw +2 ),....,( 221 tww
stw +2
),....,,...,( 221,111 tt wwww

Para contrastar la causalidad de Granger se realiza el siguiente contraste
tptptptptt wwwwcw εββαα +++++++= −−−− 111121212 ......
0...: 10 === pH ββ

En un modelo VAR, la no causalidad en sentido de Granger significa que todas las matrices son triangulares.
Ejemplo: En el modelo VAR(1) anterior
iΦ
+
=
−
−
t
t
t
t
t
t
a
a
w
w
w
w
2
1
12
11
22
1211
2
1
0 φφφ
2. Estimación
La estimación del modelo VAR(p) puede hacerse por Máxima Verosimilitud estimando el sistema completo. Sin embargo, dado que no existen componentes de Medias Móviles, la estimación MCO ecuación por ecuación es consistente y asintóticamente normal si se cumple una de las siguientes condiciones:
i) no hay parámetros iguales a cero en el modelo (todas las ecuaciones tienen las mismas variables).
ii) La matriz de varianzas y covarianzas de la perturbación es diagonal.

3. Modelos VAR con variables exógenas.
Modelos recursivos.
El objetivo de la exogeneidad es simplificar el análisis econométrico para reducir el número de ecuaciones que tenemos que considerar en el sistema. Una variable es exógena cuando el análisis que se pretende realizar, puede hacerse sin necesidad de modelizar expresamente la ecuación de dicha variable.
Vamos a considerar dos tipos de exogeneidad:
1) Exogeneidad débil cuando el objetivo es la predicción de parámetros.
2) Exogeneidad fuerte cuando el objetivo es la predicción.

Decimos que hay exogeneidad débil cuando los parámetros en y son de variación libre y no tiene elementos comunes. Además, los parámetros que queremos estimar solo dependen de
Para que haya exogeneidad fuerte, además de las dos condiciones anteriores, no debe haber causalidad en sentido de Granger. En este caso,
Cuando hay variables fuertemente exógenas, se obtiene lo que se conoce como modelo VARX.
1λ 2λ
1λ
),|(),,|(),,|,( 21
1111
11
11
1 λλλ −−−− = tt
ttt
tttt ZZfZYYfZYZYf

Modelos recursivos
En los modelos recursivos las ecuaciones del modelo se pueden ordenar de tal forma que una variable endógena de orden superior no influye, ni conteporáneamente ni desfasada, en una variable endógena de orden inferior.
El modelo se dice que es recursivo cuando (i) es posible ordenar las variables del modelos VARX de forma que las matrices tengan una estructura triangular (algunas variables no causan a otras en sentido de Granger) y (ii) la matriz de varianzas y covarianzas es diagonal.

Ejemplo:
+
+
=
−
−
−
−
−
−
t
t
t
t
t
t
t
t
t
t
t
t
a
a
a
w
w
w
w
w
w
w
w
w
3
2
1
23
22
21
)2(33
)2(32
)2(31
)2(22
)2(21
)2(11
13
12
11
)1(33
)1(32
)1(31
)1(22
)1(21
)1(11
3
2
1
0
00
0
00
φφφφφ
φ
φφφφφ
φ
=Ω23
22
21
00
00
00
σσ
σ

En este caso, no es causada ni por ni por
Además, no es causada por
Finalmente, no existen relaciones contemporáneas entre las tres variables.
tw1 tw2 tw3
tw2 tw3
tttt awww 121)2(
1111)1(
111 ++= −− φφ
tttttt awwwww 222)2(
2221)2(
2112)1(
2211)1(
212 ++++= −−−− φφφφ
tttttttt awwwwwww 313)2(
3322)2(
3221)2(
3113)1(
3312)1(
3211)1(
313 ++++++= −−−−−− φφφφφφ

Cuando se cumple la hipótesis de recursividad, todas las variables explicativas de cualquier ecuación son fuertemente exógenas.
El modelo puede ser estimado ecuación por ecuación por MCO sin perder eficiencia.
4 Modelos uniecuacionales dinámicos:
retardos distribuidos y f. de transferencia
Si en un sistema de variables, todas las variables excepto una son exógenas, obtenemos el modelo uniecuacional de regresión dinámica. Vamos a considerar, dos formulaciones alternativas de modelos dinámicos uniecuacionales suponiendo que el sistema tiene dos variables y que una de ellas es fuertemente exógena:
Modelo de retardos distribuidos
Modelo de función de transferencia

Modelo de retardos distribuidos
En este caso, el modelo viene dado por:
Los resultados clásicos del estimador MCO se mantienen para este modelo. Este modelo es el modelo de regresión dinámico clásico aunque pueden plantearse problemas en su estimación por la posible multicolinealidad entre los retardos de las variables explicativas.
El multiplicador de largo plazo viene dado por
tptpttptptt uzzzyycy ++++++++= −−−− βββαα ...... 11011
)(/)( LL βα

Modelo de función de transferenciaAlternativamente se puede plantear lo que se conoce como modelo de función de transferencia en el que se diferencia la relación dinámica entre las variables exógenas y la variable endógena del comportamiento dinámico de la perturbación aleatoria.
tttt Nzzcy ++++= − ...110 νν

Cuando aparecen varios retardos de una variable significa que cambios en la variable z afectan a la variable y en varias etapas. Por ejemplo, un gasto en publicidad en un periodo determinado, afectará a las ventas futuras durante varios periodos de tiempo.
Las perturbaciones de este modelo estarán, en general, autocorrelacionadas, dado que están recogiendo la dependencia de y con respecto a su propio pasado.

Por lo tanto el modelo de función de transferencia podría expresarse como:
tp
qtr
r
ss
ttt aL
Lz
LL
LLaLzLy
)(
)(
...1...
)()(1
10
φθ
δδωωωψυ +
−−−+++=+= ∞∞

Ejemplos:
a) s=1, r=0, q=1, p=0
b) s=0, r=1, q=1, p=1
11110
110 )1()(
−− −++=−++=
tttt
ttt
aazz
aLzLy
θωωθωω
ttt aL
Lz
Ly
1
1
1 11
11
φθ
δ −−+
−=

Vamos a interpretar el polinomio
Los coeficientes de dicho polinomio se conocen como función de respuesta a un impulso.
Para definir un impulso vamos a considerar que estamos en una situación de equilibrio en la que la perturbación es cero y la variable exógenatoma un valor constante, c. En un momento del tiempo, la variable exógena tiene un cambio unitario transitorio en su valor. Es decir,
...)( 2210 +++=∞ LLL υυυυ
,...,, 210 υυυ
0)(
)(== t
p
qt a
L
LN
φθ
≠=+
=*
*
,
,1
ttc
ttczt
*t

Cuando las variables están expresadas en logaritmos, es la elasticidad contemporánea y es la elasticidad de la variable y con respecto a la variable x tras i periodos de desfase.
Vamos a ver cuáles son los efectos de un impulso sobre la variable endógena. Para ello vamos a empezar suponiendo modelos sencillos para el polinomio ...)( 2
210 +++=∞ LLL υυυυ
0υ
iυ

a) r=0 y s=1
Función de respuesta:
( ) tp
qtt a
L
LzLy
)(
)(10 φ
θωω ++=
cyet )( 10 ωω +=
0
)1(
)1(
22102
111101
010
***
***
***
=−⇒+=
=−⇒++=
=−⇒++=
+++
+++
e
ttt
e
ttt
e
ttt
yyccy
yyccy
yycy
ωω
ωωω
ωωω
≥==
=2,0
1,
0,
1
0
i
i
i
i ωω
υ
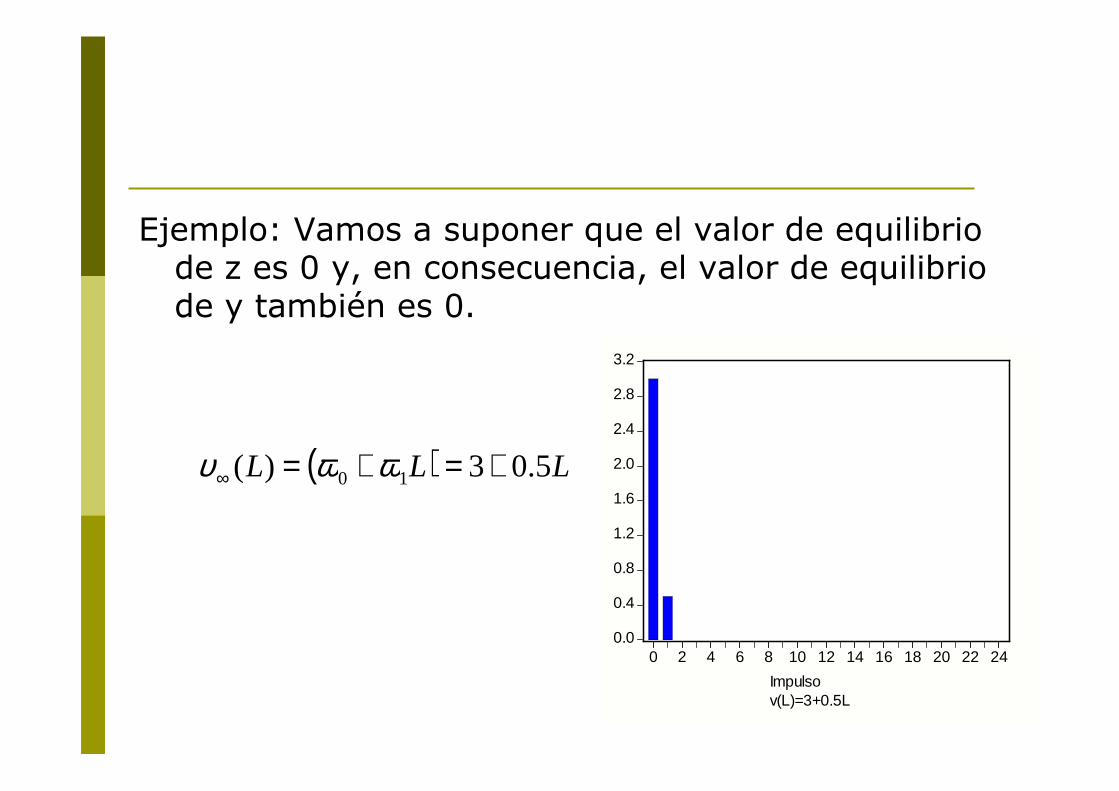
Ejemplo: Vamos a suponer que el valor de equilibrio de z es 0 y, en consecuencia, el valor de equilibrio de y también es 0.
( ) LLL 5.03)( 10 +=+=∞ ωωυ
0.0
0.4
0.8
1.2
1.6
2.0
2.4
2.8
3.2
0 2 4 6 8 10 12 14 16 18 20 22 24
Impulsov(L)=3+0.5L

El efecto puede durar mas periodos de tiempo y también aparecer después de un lapso de tiempo.
( ) 43210 25.0)( LLLLL ++=+=∞ ωωυ
0.0
0.4
0.8
1.2
1.6
2.0
2.4
0 2 4 6 8 10 12 14 16 18 20 22 24
Impulsov(L)=0.5L**2+L**3+2L**4

b) r=1 y s=0
tp
qtt a
L
Lz
Ly
)(
)(
1 1
0
φθ
δω +−
=
...1
2210
0 +++=−
LLL
υυυδ
ω
02
210 ...))(1( ωυυυδ =+++− LLL
02
12010 ...)()( ωδυυδυυυ =+−+−+ LL
0ωδυ ii =

Ejemplo:
)8.01(3
)1()( 0
LLL
−=
−=∞ δ
ωυ)4.01(
3)1(
)( 0
LLL
−=
−=∞ δ
ωυ
0.0
0.4
0.8
1.2
1.6
2.0
2.4
2.8
3.2
0 2 4 6 8 10 12 14 16 18 20 22 24
Impulsov(L)=3/(1-0.8L)
0.0
0.4
0.8
1.2
1.6
2.0
2.4
2.8
3.2
0 2 4 6 8 10 12 14 16 18 20 22 24
Impulsov(L)=3/(1-0.4L)

Como antes puede haber lapsos de tiempo antes de que haya efectos y además podemos tener algunos periodos durante los cuales los efectos no sean sistemáticos:
)8.01(2
)1()(
3233
2210
L
LL
L
LLLL
−+=
−+++=∞ δ
ωωωωυ
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0 2 4 6 8 10 12 14 16 18 20 22 24
Impulsov(L)=(L**2+2L**3)/(1-0.8L)

Si las raíces del polinomio están fuera del círculo unidad, variaciones transitorias de la variable explicativa no pueden tener efectos permanentes en la variable endógena.
El polinomio alarga la estructura sin efectos sistemáticos mientras que el polinomio
alarga dicha estructura imponiendo un determinado patrón de comportamiento.
)(Lrδ
)(Lsω)(Lrδ
Función de respuesta a un escalón
Ahora vamos a considerar que la variable explicativa tiene un cambio unitario permanente en el momento t*, es decir,
La función de respuesta a un escalón viene dada por los coeficientes que miden el impacto sobre la variable endógena de dichos cambios.
≥+<
=*
*
,1
,
ttc
ttczt
iV
iett
et
Vyy
cy
+=
+++=
*
...)( 210 υυυ

A cada uno de estos coeficientes se les conoce con el nombre de multiplicadores y, si las variables están en logaritmos, pueden interpretarse como elasticidades acumuladas
000
210
**
* ...)()1(
υυ
υυυ
=⇒=−
++++=
Vyy
ccye
tt
t
1011011
32101
**
* ...)()1)((
υυυυ
υυυυ
+=⇒+=−
+++++=
++
+
Vyy
ccye
tt
t
∑=
=i
jjiV
0
υ

La ganancia o multiplicador de largo plazo viene dado por
)1()1(
0 r
s
jjVg
δωυ === ∑
∞
=∞

Ejemplos:
( ) LLL 5.03)( 10 +=+=∞ ωωυ ( ) 43210 25.0)( LLLLL ++=+=∞ ωωυ
2.9
3.0
3.1
3.2
3.3
3.4
3.5
3.6
0 2 4 6 8 10 12 14 16 18 20 22 24Escalónv(L)=3+0.5L
0.0
0.4
0.8
1.2
1.6
2.0
2.4
2.8
3.2
3.6
0 2 4 6 8 10 12 14 16 18 20 22 24
Escalónv(L)=0.5L**2+L**3+2L**4

)8.01(3
)1()( 0
LLL
−=
−=∞ δ
ωυ
2
4
6
8
10
12
14
16
0 2 4 6 8 10 12 14 16 18 20 22 24Escalónv(L)=3/(1-0.8L)
)4.01(3
)1()( 0
LLL
−=
−=∞ δ
ωυ
2.8
3.2
3.6
4.0
4.4
4.8
5.2
0 2 4 6 8 10 12 14 16 18 20 22 24Escalónv(L)=3/(1-0.4L)

)8.01(2
)1()(
3233
2210
L
LL
L
LLLL
−+=
−+++=∞ δ
ωωωωυ
0
4
8
12
16
0 2 4 6 8 10 12 14 16 18 20 22 24
Escalónv(L)=(L**2+2L**3)/(1-0.8L)

A partir del modelo de transferencia, es posible obtener el modelo de retardos distribuidos pero al contrario.
ttt
ttrqtrq
trqtt
trqtpstpr
tp
qt
r
st
azLyL
azLLyLL
aLzLyL
aLLzLLyLL
aL
Lz
L
Ly
+=
+=
+=
+=
+=
−+
−+
+
)()(
)()()()(
)()()(
)()()()()()(
)(
)(
)()(
*1*1
**
βαβϕαϕ
ϕβα
δθφωφδφθ
δω
Top Related