1 / 1 - Repositorio UTP: Página de iniciorepositorio.utp.edu.pe/bitstream/UTP/964/1/Jose... ·...
10
1 / 1
Transcript of 1 / 1 - Repositorio UTP: Página de iniciorepositorio.utp.edu.pe/bitstream/UTP/964/1/Jose... ·...
1 /1
Director de la revistaMg. Enrique Mansilla Pérez
Comité editorialMg. Mauricio AguirreMg. Felipe OnchiCPC Angélica Urquizo
ColaboradoresMg. Sandra RomeroIng. Vladimir Barahona
Diseño y diagramaciónJuan Carlos Jiménez Flores
2Investiga UTP, Nº 1, Marzo 2018
ResumenEl Posicionamiento y modelado son problemas fundamentales en la navegación de robots móviles. El presente trabajo describe la construcción de un robot móvil omnidireccional de tres ruedas con tres grados de libertad. La configuración elegida mecánicamente es simple, y proporciona la capacidad al móvil de desplazarse en cualquier dirección sin necesidad de realizar una rotación previa, característica muy útil en espacios reducidos.
En la primera parte de este trabajo se presenta el modelado matemático del sistema robot móvil omnidireccional. En segundo lugar se exhibe el diseño mecánico del móvil partiendo de valores específicos de velocidad, aceleración, carga requeridas, también se presenta una metodología del cálculo de potencia de los motores a partir del análisis del modelo dinámico y cinemático del robot móvil, seleccionando con los datos obtenidos,
Diseño de un sistema de control de posición de un robot móvil omnidireccional
Por: Ing. Jose Luis Bohorquez Bendezú1
1 Docente del Departamento de Electrónica, Cursos de Sistemas de Control e Ingenieria de Control, Universidad Tecnológica del Perú[email protected]
los tres motores de corriente continua. Finalmente el controlador usado en este prototipo es un controlador proporcional-derivativo (PD).
El trabajo presenta simulaciones de tres tipos de desplazamientos (circular, senoidal y lineal) que puede realizar el robot móvil omnidireccional.
Palabras clavesRobots móviles, Control Proporcional Derivativo, Configuración Ackerman.
IntroducciónEn espacios reducidos como los almacenes, clínicas, edificios, se suelen usar vehículos omnidireccionales (Fig. 1.), Para controlar estos móviles omnidireccionales es necesario realizar un modelado matemático del sistema físico (Robot móvil omnidireccional) por lo cual se plantea en este proyecto la realización del modelado cinemático, dinámico y control de un robot
Los robots se reirán de nuestra valiente locura -dijo-. Pero algo
en sus corazones de hierro anhelará haber vivido y haber muerto
como nosotros, cumpliendo nuestra misión como héroes.
Bajo la misma estrella 2012 – John Green
24Investiga UTP, Nº 1, Marzo 2018

2 Disponible en la página web http://www.irobot.com/For-Business/Ava-500.aspx .3 Ruedas omnidireccionales usadas: Disponible en la página web http://www.kornylak.com/wheels/transwheel.html .
móvil omnidireccional como también el diseño del sistema mecánico del prototipo.
(a)
(b)
Fig. 1. Vehículo de carga de la empresa DEMATIC (a), AVA 500 innovador robot móvil de Telepresencia2
I. Modelamiento matemático del sistemaEn este trabajo se desarrolla el modelamiento matemático de los subsistemas que conforman al robot móvil omnidireccional, con el fin de diseñar el sistema de control de posición del robot móvil omnidireccional.
El robot móvil omnidireccional consta de tres ruedas omnidireccionales3 con rodillos dispuestos en 90 grados respecto de la rueda principal, lo cual permite a la rueda la particularidad de desplazarse de forma lateral. Las tres ruedas están dispuestas en los vértices de un triángulo equilátero que conforman la base del móvil como se observa en la figura 2.
Estas características descritas permiten que el móvil se desplace en cualquier dirección sin necesidad de realizar giros previos, como son necesarios en otras configuraciones (diferencial, ackerman, etc).
El modelo cinemático y dinámico se obtiene a partir de la mecánica newtoniana o mecánica vectorial, también se obtiene el modelo dinámico de los motores de corriente directa. Estos modelos sirven para
25 /24

realizar las simulaciones correspondientes del comportamiento dinámico del móvil.
Fig. 2. Esquema del móvil omnidireccional.
En la figura 3 se representa un esquema del sistema robot móvil en el cual se detalla las principales características del mismo usando una rueda genérica (Rn); vector posición ( ), Velocidad tangencial de la rueda ( ), Velocidad angular del móvil ( ), todas estas variables útiles para el modelado cinemático del robot móvil.
Fig. 3. Velocidad tangencial de la rueda con respecto al centro del móvil (M).
A. Modelo cinemático
(1.0)
Siendo la velocidad en el eje X medida desde el world frame, la velocidad en el eje Y medida desde el world frame,
la velocidad rotacional entorno al eje Z medida desde el world frame, , , las velocidades de las ruedas, medidas desde el body frame, es el radio de la rueda y la matriz de geometría del móvil.
La ecuación matricial (1.0) se reduce a la siguiente expresión:
( 2.1 )Donde:
Vector de velocidades de las ruedas.
Derivada del vector de estados del robot móvil.
Radio de la rueda (las tres son iguales).
BM: Matriz de geometría del móvil.
B Modelo dinámico
( 2.0 )
La ecuación (2.0) se denomina: ecuación dinámica del robot móvil omnidireccional de tres ruedas o ecuación dinámica del móvil, esta relaciona la aceleración que desarrolla el móvil, con las fuerzas de tracción en las ruedas, producidas por los motores ( ).
Donde:
Vector de aceleración del móvil.
26Investiga UTP, Nº 1, Marzo 2018
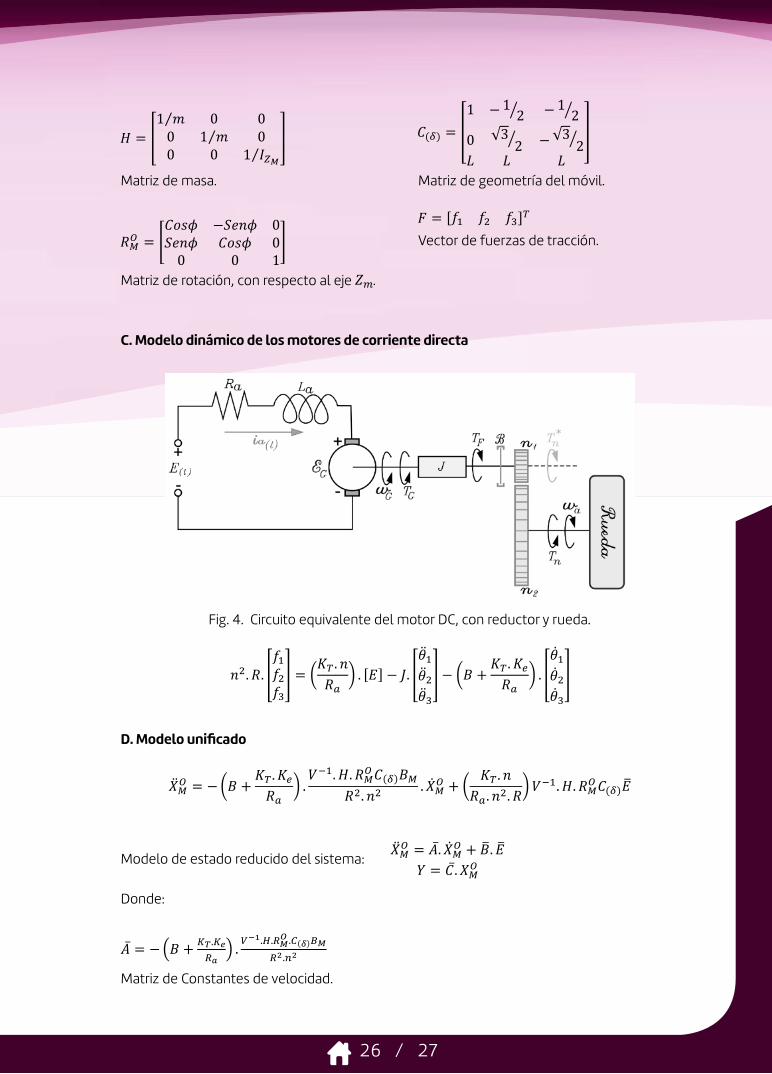
Matriz de masa.
Matriz de rotación, con respecto al eje .
Matriz de geometría del móvil.
Vector de fuerzas de tracción.
C. Modelo dinámico de los motores de corriente directa
Fig. 4. Circuito equivalente del motor DC, con reductor y rueda.
D. Modelo unificado
Modelo de estado reducido del sistema:
Donde:
Matriz de Constantes de velocidad.
27 /26

Matriz de constantes.
Vector de estados del robot.
Vector de voltajes de los motores.
II. Diseño virtual (Solidwork)En este diseño se consideraron aspectos de estabilidad de la estructura, así como los materiales necesarios para cumplir con los requerimientos de la carga de diez kilogramos que integra los baterías, motores, aditamentos que conforman al móvil y una carga extra considerada para futuros proyectos.
El resultado del diseño base se presenta en la figura 5. Se observa la estructura completa, así como las ruedas omnidireccionales con sus soportes, disposición de los motores, baterías, tarjetas de control, etc.
Fig. 5. Vista isométrica del robot móvil
III. ControlPara sintonizar los parámetros del controlador, se emplea el modelo matemático del móvil omnidireccional y se usa un método de prueba y error para la sintonización de los parámetros del controlador, de esta forma se determinan los valores representados en la figura 6 de forma empírica.
Esto solo se desarrolla como primer paso ya que el controlador final se plantea el uso de un control multivariable.
Figura 6. Sistema de control PD
28Investiga UTP, Nº 1, Marzo 2018
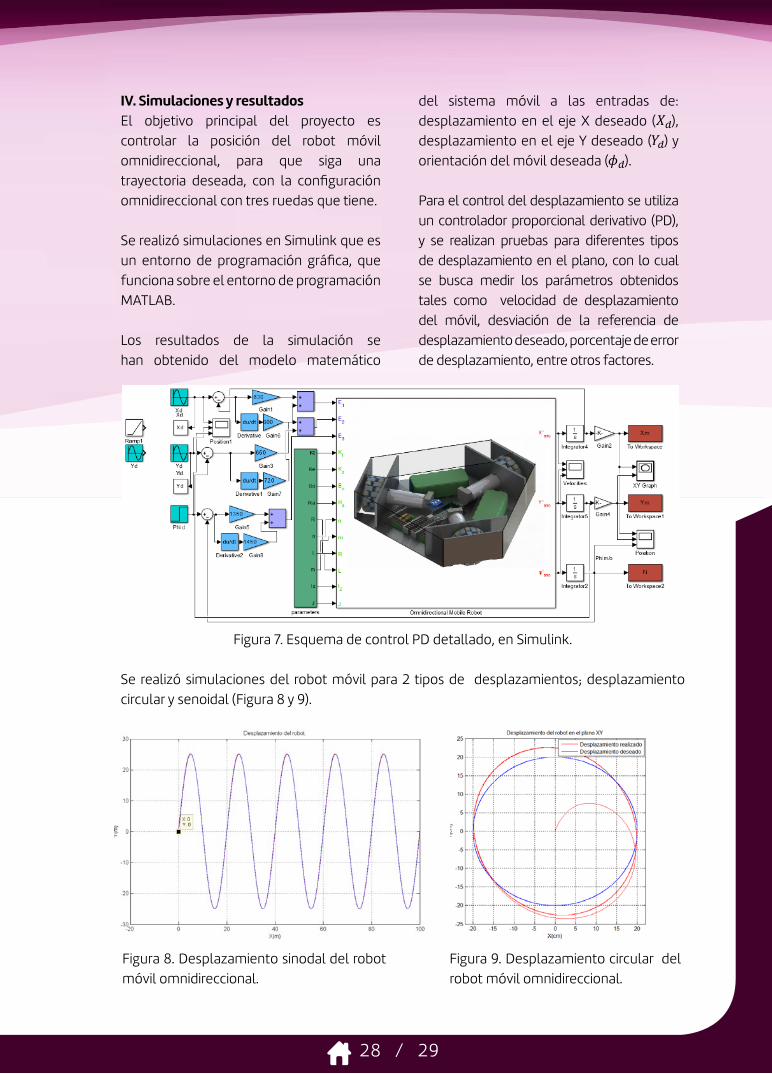
IV. Simulaciones y resultadosEl objetivo principal del proyecto es controlar la posición del robot móvil omnidireccional, para que siga una trayectoria deseada, con la configuración omnidireccional con tres ruedas que tiene.
Se realizó simulaciones en Simulink que es un entorno de programación gráfica, que funciona sobre el entorno de programación MATLAB.
Los resultados de la simulación se han obtenido del modelo matemático
del sistema móvil a las entradas de: desplazamiento en el eje X deseado ( ), desplazamiento en el eje Y deseado ( ) y orientación del móvil deseada ( ).
Para el control del desplazamiento se utiliza un controlador proporcional derivativo (PD), y se realizan pruebas para diferentes tipos de desplazamiento en el plano, con lo cual se busca medir los parámetros obtenidos tales como velocidad de desplazamiento del móvil, desviación de la referencia de desplazamiento deseado, porcentaje de error de desplazamiento, entre otros factores.
Figura 7. Esquema de control PD detallado, en Simulink.
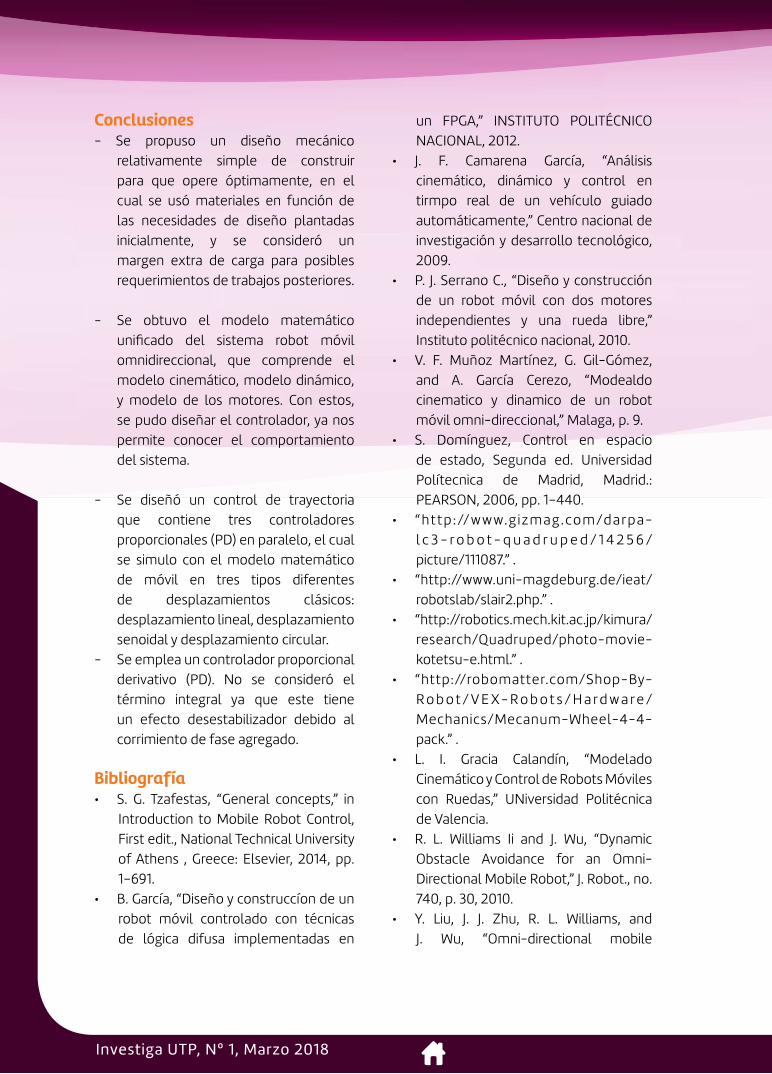
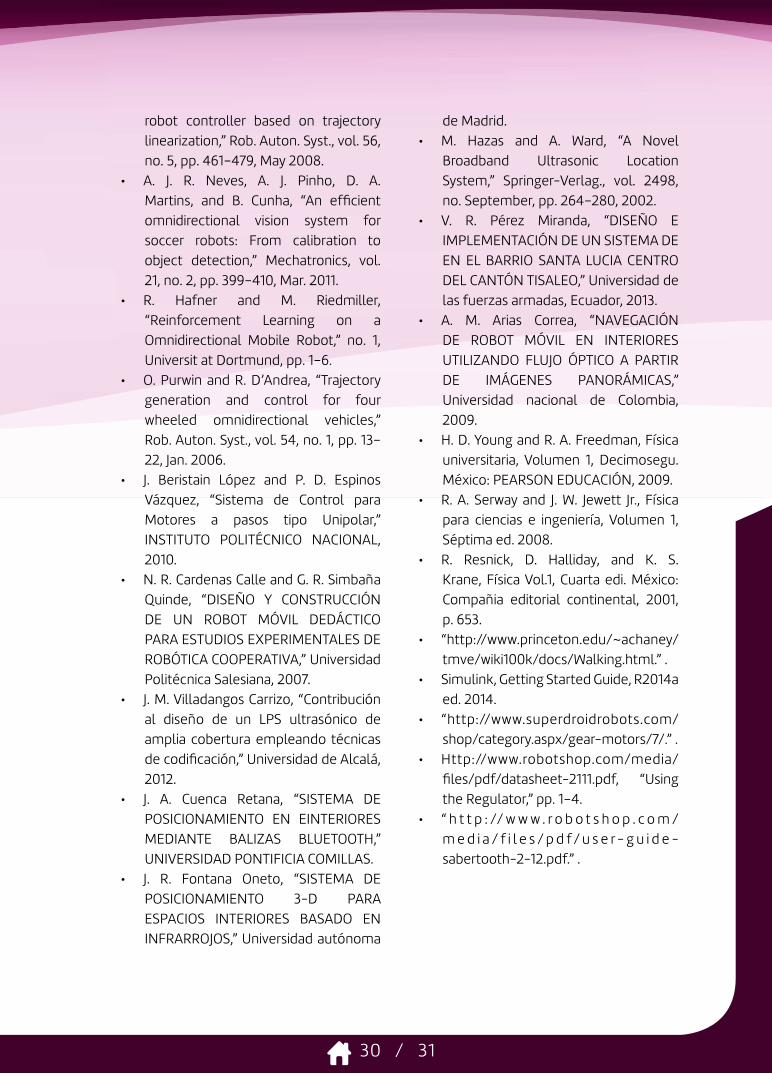
Se realizó simulaciones del robot móvil para 2 tipos de desplazamientos; desplazamiento circular y senoidal (Figura 8 y 9).
Figura 8. Desplazamiento sinodal del robot móvil omnidireccional.
Figura 9. Desplazamiento circular del robot móvil omnidireccional.
29 /28
Conclusiones- Se propuso un diseño mecánico
relativamente simple de construir para que opere óptimamente, en el cual se usó materiales en función de las necesidades de diseño plantadas inicialmente, y se consideró un margen extra de carga para posibles requerimientos de trabajos posteriores.
- Se obtuvo el modelo matemático unificado del sistema robot móvil omnidireccional, que comprende el modelo cinemático, modelo dinámico, y modelo de los motores. Con estos, se pudo diseñar el controlador, ya nos permite conocer el comportamiento del sistema.
- Se diseñó un control de trayectoria que contiene tres controladores proporcionales (PD) en paralelo, el cual se simulo con el modelo matemático de móvil en tres tipos diferentes de desplazamientos clásicos: desplazamiento lineal, desplazamiento senoidal y desplazamiento circular.
- Se emplea un controlador proporcional derivativo (PD). No se consideró el término integral ya que este tiene un efecto desestabilizador debido al corrimiento de fase agregado.
Bibliografía• S. G. Tzafestas, “General concepts,” in
Introduction to Mobile Robot Control, First edit., National Technical University of Athens , Greece: Elsevier, 2014, pp. 1–691.
• B. García, “Diseño y construccíon de un robot móvil controlado con técnicas de lógica difusa implementadas en
un FPGA,” INSTITUTO POLITÉCNICO NACIONAL, 2012.
• J. F. Camarena García, “Análisis cinemático, dinámico y control en tirmpo real de un vehículo guiado automáticamente,” Centro nacional de investigación y desarrollo tecnológico, 2009.
• P. J. Serrano C., “Diseño y construcción de un robot móvil con dos motores independientes y una rueda libre,” Instituto politécnico nacional, 2010.
• V. F. Muñoz Martínez, G. Gil-Gómez, and A. García Cerezo, “Modealdo cinematico y dinamico de un robot móvil omni-direccional,” Malaga, p. 9.
• S. Domínguez, Control en espacio de estado, Segunda ed. Universidad Polítecnica de Madrid, Madrid.: PEARSON, 2006, pp. 1–440.
• “http://www.gizmag.com/darpa-l c 3 - r o b o t - q u a d r u p e d / 1 4 2 5 6 /picture/111087.” .
• “http://www.uni-magdeburg.de/ieat/robotslab/slair2.php.” .
• “http://robotics.mech.kit.ac.jp/kimura/research/Quadruped/photo-movie-kotetsu-e.html.” .
• “http://robomatter.com/Shop-By-R o b o t / V E X- R o b o t s / H a rd w a re /Mechanics/Mecanum-Wheel-4-4-pack.” .
• L. I. Gracia Calandín, “Modelado Cinemático y Control de Robots Móviles con Ruedas,” UNiversidad Politécnica de Valencia.
• R. L. Williams Ii and J. Wu, “Dynamic Obstacle Avoidance for an Omni-Directional Mobile Robot,” J. Robot., no. 740, p. 30, 2010.
• Y. Liu, J. J. Zhu, R. L. Williams, and J. Wu, “Omni-directional mobile
30Investiga UTP, Nº 1, Marzo 2018
robot controller based on trajectory linearization,” Rob. Auton. Syst., vol. 56, no. 5, pp. 461–479, May 2008.
• A. J. R. Neves, A. J. Pinho, D. A. Martins, and B. Cunha, “An efficient omnidirectional vision system for soccer robots: From calibration to object detection,” Mechatronics, vol. 21, no. 2, pp. 399–410, Mar. 2011.
• R. Hafner and M. Riedmiller, “Reinforcement Learning on a Omnidirectional Mobile Robot,” no. 1, Universit at Dortmund, pp. 1–6.
• O. Purwin and R. D’Andrea, “Trajectory generation and control for four wheeled omnidirectional vehicles,” Rob. Auton. Syst., vol. 54, no. 1, pp. 13–22, Jan. 2006.
• J. Beristain López and P. D. Espinos Vázquez, “Sistema de Control para Motores a pasos tipo Unipolar,” INSTITUTO POLITÉCNICO NACIONAL, 2010.
• N. R. Cardenas Calle and G. R. Simbaña Quinde, “DISEÑO Y CONSTRUCCIÓN DE UN ROBOT MÓVIL DEDÁCTICO PARA ESTUDIOS EXPERIMENTALES DE ROBÓTICA COOPERATIVA,” Universidad Politécnica Salesiana, 2007.
• J. M. Villadangos Carrizo, “Contribución al diseño de un LPS ultrasónico de amplia cobertura empleando técnicas de codificación,” Universidad de Alcalá, 2012.
• J. A. Cuenca Retana, “SISTEMA DE POSICIONAMIENTO EN EINTERIORES MEDIANTE BALIZAS BLUETOOTH,” UNIVERSIDAD PONTIFICIA COMILLAS.
• J. R. Fontana Oneto, “SISTEMA DE POSICIONAMIENTO 3-D PARA ESPACIOS INTERIORES BASADO EN INFRARROJOS,” Universidad autónoma
de Madrid.• M. Hazas and A. Ward, “A Novel
Broadband Ultrasonic Location System,” Springer-Verlag., vol. 2498, no. September, pp. 264–280, 2002.
• V. R. Pérez Miranda, “DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE EN EL BARRIO SANTA LUCIA CENTRO DEL CANTÓN TISALEO,” Universidad de las fuerzas armadas, Ecuador, 2013.
• A. M. Arias Correa, “NAVEGACIÓN DE ROBOT MÓVIL EN INTERIORES UTILIZANDO FLUJO ÓPTICO A PARTIR DE IMÁGENES PANORÁMICAS,” Universidad nacional de Colombia, 2009.
• H. D. Young and R. A. Freedman, Física universitaria, Volumen 1, Decimosegu. México: PEARSON EDUCACIÓN, 2009.
• R. A. Serway and J. W. Jewett Jr., Física para ciencias e ingeniería, Volumen 1, Séptima ed. 2008.
• R. Resnick, D. Halliday, and K. S. Krane, Física Vol.1, Cuarta edi. México: Compañia editorial continental, 2001, p. 653.
• “http://www.princeton.edu/~achaney/tmve/wiki100k/docs/Walking.html.” .
• Simulink, Getting Started Guide, R2014a ed. 2014.
• “http://www.superdroidrobots.com/shop/category.aspx/gear-motors/7/.” .
• Http://www.robotshop.com/media/files/pdf/datasheet-2111.pdf, “Using the Regulator,” pp. 1–4.
• “ h t t p : // w w w . r o b o t s h o p . c o m /m e d i a / f i l e s / p d f / u s e r - g u i d e -sabertooth-2-12.pdf.” .
31 /30