1.6.2. REPRESENTACIÓN GRÁFICA DE UN NUMERO COMPLEJO...
55
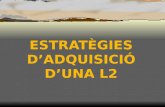
1.6.2. REPRESENTACIÓN GRÁFICA DE UN NUMERO COMPLEJO En un número complejo Z=a+bi, hay dos números reales que lo caracterizan, su parte Real a y su parte imaginaria b, las cuales, de acuerdo al concepto de igualdad en C si se intercambian entre sí, alteran al número complejo Z, pues a+bi*b+ai; e'sto hace que los números a y b tengan la misma característica de la pareja (a,b) en el sentido de que: a+bi=c+di •* a=c y b=d y (a,d)=(c,d)*a=c y b=d. Esto motiva a representar cada número complejo a+bi como la pareja (a,b), donde la primera componente "a" corresponde a la parte Real del complejo y se ubicará sobre el eje de las x, que se llamará eje Real y la segunda componente "b" representará la parte imaginaria del complejo y se ubicará sobre el eje y, que se llamará eje imaginario. Ejt tm«gtn*Ho . * <a,bWb1 ' I i I Eje Real * •-5+31 5i 21 •4+41 -4+01 1+oT •-5-31 •4-41 99
Transcript of 1.6.2. REPRESENTACIÓN GRÁFICA DE UN NUMERO COMPLEJO...

1.6.2. REPRESENTACIÓN GRÁFICA DE UN NUMERO COMPLEJO
En un número complejo Z=a+bi, hay dos números reales que lo
caracterizan, su parte Real a y su parte imaginaria b, las
cuales, de acuerdo al concepto de igualdad en C si se
intercambian entre sí, alteran al número complejo Z, pues
a+bi*b+ai; e'sto hace que los números a y b tengan la misma
característica de la pareja (a,b) en el sentido de que:
a+bi=c+di •* a=c y b=d y
(a,d)=(c,d)*a=c y b=d.
Esto motiva a representar cada número complejo a+bi como la
pareja (a,b), donde la primera componente "a" corresponde a
la parte Real del complejo y se ubicará sobre el eje de las
x, que se llamará eje Real y la segunda componente "b"
representará la parte imaginaria del complejo y se ubicará
sobre el eje y, que se llamará eje imaginario.
Ejt tm«gtn*Ho
. * <a,bWb1 ' I
i I Eje Real *
•-5+31
5i
21 •4+41
-4+01 1+oT
•-5-31 •4-41
99

Ejemplo 2 Al representar un número complejo de la forma x+iy con un
punto (x,y) de R 2 , se puede inmediatamente pensar en
caracterizarlo por medio del r y 0 que identifica al punto
(x,y) en coordenadas polares, por lo tanto el número complejo
Z=x+iy queda determinado por la distancia del punto (x,y) al
origen que se. llamará el módulo de Z, y se notará por |Z|, es decir, | Z | -/xa +ya y Por un ángulo 8, que forma el eje positivo de las x con el segmento de recta que va del origen
al punto y que se llamará "argumento" de Z (con las mismas
consideraciones expuestas en la representación polar de
puntos de l 2 ) . El argumento de Z tal que -180°<ArgZ<180° se
llamará al Argumento Principal de Z.
Ejemplos
Hallar el módulo, argumento y argumento principal de :
Zi = 2+2i; Z 2=-l-i;
i) Si Zi=2+2i, entonces | Zx |
y argumento de
Z1-Arcran-|±2Jc*180°-45°±2Jc*180°; Jc-1,2,3,,, .
Argumento principal de Z^ArcTan^--Arc!Tanl-450 .
100

ii) Si Z 2=-l-i, entonces | Z2 | -yr(-l)2+ ( - l ) 2 - ^ y argumento de
Z 2-ArcTan(^-) ±2Jc*180°*45o±2Jc*180° Jc-1,2,3,...
Argumento principal de
Z 2-Arcran(-fl)-180 o-45 o-180 o—135° , ya que el complejo
Z 2=-l-i se encuentra en el 3 e r cuadrante y el ángulo 0
debe encontrarse entre -180° y 180°
iii) De , se tiene que | Z3 | -^1+(\^3) a-\/4-2 y
argumento de Z ^ A r c T a n i - ^ - ) ±2ic*180o— 60o*2ic*180o y
argumento principal de Z, - Al cTan { ) — 6 0 ° .
101

EJERCICIOS
1. Hallar módulo, argumentos y argumento principal de los
siguientes números complejos: Zx~2+2,/5í, Z2— 4+4 i
2. Representar gráficamente el conjunto de valores de Z para
los cuales:
a) |Z-3|=2. b)
d) J Z- i | =2 e)
g) Z(Z+2)=3 h)
j ) 1<|Z + i|<2.
|Z-5 j<4
|Z + 2 i| + |Z-2 i| = 10
Im(Z2 )=4
c) j Z-2i|<2
f) |Z-3|-|Z+3¡=4
i) 135°<ArgZ<60°
102

1.6.3. CONJUGADO DE UN NÚMERO COMPLEJO
Si se trata de efectuar la división de números complejos:
W a+bi
Z c+di
Hasta el momento se realiza como el producto
H*Z-1=(a+bi)*(c+di)-1, pero si se tiene en cuenta que siempre
el producto (a+Bi)(a-3i)=a2+02 es un número Real, es posible
efectuar esta división multiplicando numerador y denominador
por c-di, con lo que se obtiene: a+bl . c-dl m (a+bl) (c-dl) . .
C+DL C-DL ' 6 S C l r ' l a división se reduce
a una multiplicación de números complejos, dividiendo su
resultado por un número Real (c2+d2). Dado el número Z=c+di,
al número c-di, se llama el conjugado de Z y se nota por Z;
es decir; si Z=c+di, entonces Z=c-di.
Gráficamente, el punto que representa Z es simétrico respecto
al eje Real, al punto que representa Z.
4
•r,
Z
1
zi
03 7

Ejenplos
Si Zi=3+5i; Zl=3+5l=3-5i.
Si Z 2=-3-5i; Z2=-3-5i=-3+5i.
Si Za=i; Za=0+T=-i.
Si Z 4=3; Z4=3+01=3
Si Zs = l-5i; "Z5=T:5l=l + 5i.
104

EJERCICIOS
1. Hall ar el conjugado de los siguentes números complejos
Zi=3+5i; Z 2=i 4; Za=(l-i)2; Z 4=5i.
2. Escribir las expresiones siguientes en la forma a+bi: (2 - i ) i 4 . „ . (3-1) (3 +1)1
1 i ( 3 - ¿ ) ( l+¿) ' 2 2-1
3. Describa y construya la gráfica del lugar representado
cada una de la siguientes ecuaciones:
a) Z(Z+2)=3. b) Z*Z=16. c) Z+Z=4. d)~Z=Z+6i
105

1.6.4 PROPIEDADES
1. |Z|=|Z|.
Demostración (Ejercico).
Ejemplo.
Si Z = 2 - 3 i e n t o n c e s Z=2+3i, así
2. Z=Z.
Demostración (Ejercicio).
Ejemplo.
Si Z = -3-2i, Z = -3+2i y Z = -3-2i, asi que Z
3. Z 1 + Z 2 = Zl+"Z2.
Demostración:
Sea Zi=a+bi y Z 2=c+di, entonces
Zi+Z2 = (a+bi )+(c+d i) = (a+c)+(b+d)i, luego
Zi+Z2=(a+c)+(b+d)i=(a+c)-(d+b)i=a+c-bi-d
(a-bi)+(c-di)=ZT+22.
Ejemplo.
Si Zi=l-i, Z2=2+3i, entonces
Z i + Z 2 = ( l - i ) + ( 2 + 3 i ) . 106

4 . ZiZs = Z1Z2. Demostración (Ejercicio) e ilustrarla con un ejemplo.
Demostración (Ejercicio) e ilustrarla con un ejemplo.
6. Z-Z <* Z € l . Demostración (Ejercicio).
7. ^ ^ - parte Real de Z.
Demostración (Ejercicio).
Z-Z
8. ~~2¿~ " Parte imaginaria de Z.
Demostración (Ejercicio).
9. Z*Z = j Z| 2=a 2+b 2.
Demostración Si Z=a+bi, entonces
Z*X=(a+bi)(a-bi)=a2+b2= ( J ^ P ) 2 m | z\a.
10. |ZiZa|=|Zi||Za|.
Demostración (Ejercicio).
107

11. Parte Real de Z<|ReaZ|<¡Z| y
parte imaginaria de Z<|ImZ|<|Z|.
Demostración (Ejercicio).
12. |Zi+Z2|<|Zi|+|Z2¡.
Demostración (Justifique todos los pasos)
|z1+z2|a=(z1+z2)(z1+2a)=(z1+z2)(71+r2)=z1(r1+rI)+z,(r1+z¡)=
jZi|a+2Real(Z1Zl)+|Z2|2<|Zi|2+2|ZiZÍj+|Z2j2=
|Z.|-2|I1|P|»|Z,|-|Z1|-2|Zt||Z,|»|Z,|-(|Z,|*|Z,|»"I
luego |Zt+Zaji|Z»|+|Z2j.
Ejemplo:
|2-i+3+2i|<|2-i|+|3+2i| , ya que |2-i+3+2i|=|5+ij= y
|2-i|= VJTT-V5" y | 3+2i| = v ^ T l - v ^
108

EJERCICIOS
1. Si Z i = l-i, Z 2 = -2+4i y Z 3 - -2i, hallar el valor
númerico de cada una de las expresiones siguientes:
a) j 2Z2-3Z11 2
i) Real ( Z 1 Z 2 )
2. Que' relación existe entre |Zi+ Z 2-Zs| y | Z11 + ) Z 2 | + | Za ¡ 1
3. ¿Es cierto que para todo ZeC y k>0, |Z|<k * -k<Z<k y que
|Z|>k « Z>k ó Z <-k?.
4. Ilustrar con ejemplos las propiedades del módulo y del
conjugado.
b) |ZiZ 2+Z 2Zi| c) (Z 2+Z3)(Zi-Z 3)
e) I m ( Z 2 Z a ) h) Z a* Z*
109

CAPITULO XX V E C T O R E S
En este capítulo, se estudiará otro tipo de magnitud
diferente a los números (escalares) que se llamarán
"vectores", los cuáles sirven para representar fenómenos que
no pueden ser representados simplemente por números. No
solamente se estudiará el concepto de vector, sino también
las diferentes operaciones que entre ellos se pueden
realizar, con sus propiedades y aplicaciones. Estos vectores
que están intimamente relacionados con los puntos en el plano
(R 2) y los puntos en el espacio (l3), son esenciales para
estudiar la geometría en estos espacios; además su
conocimiento es fundamental para estudiar la física a todo
nivel y otras áreas del conocimiento, pues por medio de ellos
se pueden describir mejor algunos conceptos y fenómenos. Es
preciso aclarar que se puede hablar de vectores en espacios
de dimensión superior a 3, los cuales no se estudiaran en
este capítulo, sino que se dejarán para un estudio más
sistemático posteriormente.
110

2.1. EL ESPACIO I 3 .
Así como se estableció una correspondencia biunívoca entre
los puntos del plano y l 2 , es posible también establecer una
correspondencia biunívoca entre los puntos del espacio y el
conjunto E 3={(x,y,z)/xeR, y€R, zeR} . Para ello se toma el
plano cartesiano E 2 y se hace pasar por el punto (0,0) de E 2,
una recta perpendicular a dicho plano, la cual se llamará el
eje Z. El punto (0,0) se notará ahora por (0,0,0) y los puntoü
(x,y) del plano cartesiano se notarán P o r (x»y»0)-
Una vez metrizado el eje Z, a los puntos que están en él, se
notarán por (0,0,Z), con Z>0, si el punto eBtá por encima
del plano cartesiano y Z<0, si el punto está por debajo. Al
elemento (x,y,z) de E 3, se le hace corresponder el punto del
espacio que está a una altura Z del punto (x,y,o) del plano
cartesiano (Hacia arriba si Z>0, hacia abajo si Z<0).
Recíprocamente a cualquier punto en el espacio se le puede .
asocxar un elemento (x,y,z) de E 3, donde (x,y,0) corresponde
a la coordenada de la proyección del punto sobre el plano xy
y (0,0,Z) a la coordenada de la proyección del punto sobre el
eje Z. Esta representación se conoce con el nombre de sistema
111

de coordenadas en el espacio, la cual se ilustrá en
figuras 2.1 y 2.2
(0,0,
( X o , 0 , 0 ) / -(x<»y©,o)
Fig 2.1
(3,4,5)
y (3,4,0)
(3,0,-2)
Fig 2.2
112

EJERCICIOS
1. Representar en el espacio los puntos (-2,1,3), (-5,5,-5),
(8,10,2), (-3,-5,-2).
2. Dibujar un cubo de lado 3 con uno de sus vértices en el
origen y localice todos los demás vértices.
3. A que región del espacio corresponde:
a) {(0,7, 0>|y€l}
b) {(x,y, z)|z>0, xel, y€l}
c) í(x,y, z) |x=0; z=4, yel}
d) { ( x, y, z)|y<0; X € L , Z € * }
e) {(x,y, Z ) | X > 1 , y,zel}
f) í(x,y, z)|x,yel, z>0)
113

2.2 DISTANCIA ENTRE DOS PUNTOS
Sean P = ( X B ,ye>, Z B) y Q=(xi,yi,zi) dos puntos cualquiera en el
espacio; se trata de calcular la distancia entre estos
puntos, es decir, de hallar la longitud del segmento de recta
PQ. (Fig. 2.3). Si se llama L la magnitud de la proyección
del segmento PQ sobre el plano XY, los tres puntos P , Q , R
son los vértices de un triángulo rectángulo y por lo tanto
aplicando el teorema de Pitágoras se tiene:
[d(P,Q)] 2=L 2+(Z1-Z0 ) 2 donde d(P,Q) indica la distancia entre
P y Q.
114

En el plano XY, el triangulo cuyos vértices son (xa,yo,0),
(xi,yi,o) y Q' es rectángulo, por lo tanto, aplicando de
nuevo el teorema de Pitágoras se obtiene:
L 2=(xi - x 0) 2+(yi - y 0 ) 2, reemplazando este valor de L 2, en la
ecuación anterior, ésta se convierte en: [d(P.Q))2=(X1-X0)2+(Y1-Y0)2+(Z1-Z0)2 o sea
d{P, Q) ^U^JM^-VMZi-Zo)2
Teniendo en cuenta que se está tomando raíz positiva.
Es evidente, que si se toman dos puntos cualquiera en R 2
P = ( X 0 , y 0 ) , Q=(xi,yi) es como si se tomarán dos puntos en R 3
con tercera componente cero; por tanto:
Ejemplo 1
Hallar la distancia del punto P=(4,3,2) a algún punto de la
recta y=4x+2 en el plano XY.
Si se le da a x cualquier valor, por ejemplo x=3, se tiene «
que y=4*3+2=14, por tanto el punto (3,14,0) es un punto sobre
la recta y la distancia de éste a P, esta"'dada por: yj (4-3)a+ (3-14) 2+ (2-0) z-^126
Ejemplo 2
Los cuatro vértices P=(4,5,-l); Q=(0,5,0)
115

R=(-2,-3,2) y S=(2,-3,1 ) son los vértices de un cuadrilátero
en el espacio, hallar las longitudes de sus diagonales y la
L^-diQ.R) (-2-0) 2 + (-3-5) 2 + (2-0) 2=V4 +64 +4-/72
L3'd(RfS) -y/(2+2 ) 2+(-3+3) 2+(1-2) 2^4+0+1-^/5
LA'd(S,P) -V (4-2) 2+ (5+3) 2 + ( - l - l ) W 4 +54+4-/71?
D^diQ, S) "V (2-0) 2 + (-3-5) 2 + (1-0) 2-y4 +64+1-/^9
Da-d(P,J?) «V (-2 -4) 2 + (-3-5) 2 + (2 +1 ) 2=v/36 +64 +9-/TÖ9
116

EJERCICIOS
1. Dados los puntos P=(l,2,0); Q=(4,2,0); R=(l,4,0);
S=(l,4,5). Construir un paralepípedo recto, halle la
longitud de sus lados, de sus diagonales y de las
diagonales de sus caras.
2. Si dados dos vectores, se define la distancia entre ellos
como la magnitud del segmento que une sus puntos finales,
después de haberlos ubicado con punto inicial común:
i) ¿Cuál será la distancia entre A=(ai , a 2,aa) y
B=(bi,b 2,b 3)?.
ii) ¿Cuál la distancia entre dos vectores paralelos con
igual magnitud?.
iii) ¿Qué relación existe entre d(A,B), d(B,C), d(A,C)?,
siendo A, B y C tres vectores cualquiera.
iv) ¿Cuándo es d(A,B)=d(B,A)?
v) ¿Cuándo es d(A,B)=0?.
117

2.3 CONCEPTO DE VECTOR
A diferencia de la temperatura, el peso, la longitud y otras
magnitudes que se pueden representar simplemente como un
número y que se llaman Magnitudes escalares, existen otras
para las cuales no es suficiente un número para
representarlas completamente, como se puede apreciar en el
ejemplo siguiente:
Se sabe que para mover el cuerpo que esta en el punto A se
requiere aplicar una fuerza de 10Kgrm fuerza. Se trata de
mover el objeto desde el punto A hasta el punto B en línea
recta, es evidente que si se le aplica al objeto los 10Kgrm
fuerza, el objeto se moverá, pero si ésta no se aplica en
dirección de B, sino en otra, el objeto no llegará a B en
línea recta, e'sto nos muestra que en el momento de aplicar
una fuerza con determinado objetivo es necesario no solamente
tener en cuenta el número Real que representa la fuerza
(I0Kg) sino que también es necesario determinar en que
dirección se debe aplicar la fuerza, es decir, para
118

representar una fuerza no solamente basta con un número real
(magnitud de la fuerza) sino que es necesario tener en cuenta
su dirección y a magnitudes de este tipo se les conoce con el
nombre de Magnitudes Vectoriales ó simplemente Vectores.
Un vector se representa geométricamente por medio de un R
segmento rectilineo orientado (una flecha) en el plano o en
el espacio.
La longitud del segmento indica la magnitud del vector y la
dirección la determina la orientación de la flecha, es decir
un vector queda completamente determinado por un punto
inicial y un punto final.
Los vectores se notarán con letras con una flecha encima y su
magnitud (escalar) simplemente con la letra inicial.
También se pueden notar indicando su punto inicial y su punto
final con una flecha encima por ejemplo (Fig 2.5 )
119

z
Fig 2.5
120

EJERCICIOS
1. Analice si los conceptos de velocidad, aceleración de
partículas, área de superficies y densidad son magnitudes
vectoriales o escalares.
2. Localizar los vectores P0P*, P1P2, P 2 P 1, P1P0 donde
P b = ( 0 , 0 , 0 ) , P I = ( - 1 , - 2 , 3 ) , P 2 = ( 4 , 0 , 4 ) .
3. Dado el vector P 0 P 1 donde P 0=(l,l , 2 ) y Pi=(3,4,5), halle
el vector proyección sobre el plano xy.
121

2.4 IGUALDAD DE VECTORES
Se ilustrarán con dos ejemplos, dos situaciones relacionadas
con el concepto de igualdad de vectores, cada una de las
cuales conlleva a un manejo diferente de ellos
s
± Fig 2.6
i) Supóngase que los vectores A,B de la figura 2.6 tienen la
misma magnitud y dirección, sólo difieren de la posición — »
en el espacio. Si el vector A representa una fuerza, es
evidente que el efecto que producirá sobre la balanza al aplicarse en el punto P será diferente al que producirá el —» mismo vector A si en lugar de aplicarle en P, se traslada
hasta ocupar la posición de B (Sin trasladar la balanza) y
se aplica en Q. En este caso independientemente de que los
vectores A y í? tengan la misma magnitud y dirección, se
considerarán diferentes, pues al ocupar diferentes
posiciones en el espacio, no producen el mismo efecto.
Cuando se manejan los vectores con este concepto de
igualdad, se dice que se trata de vectores fijos o ligados
según este criterio:
122

Dos vectores son iguales si tienen la misma
magnitud, dirección y posición en el espacio.
ii) Considérese ahora en la misma figura, que a la vez que el
vector j? es trasladado hasta ocupar la posición del
vector B, el sistema de la balanza se traslada la misma
cantidad y en la misma dirección. En este caso el vector
A ha cambiado su posición en el espacio, pero su efecto
sobre el sistema es el mismo, ya que al haberse
trasladado la balanza también, el vector está siendo
aplicado en el mismo punto sobre la balanza que antes de
hacer los traslados. En este caso se puede considerar que
los vectores A y B son iguales independientemente de que
ocupen posiciones diferentes en el espacio, pues el
efecto que producen sobre el sistema es el mismo. Cuando
se hacen estas consideraciones se dice que se trata de
vectores libres. Según este criterio:
Dos vectores j( y É son iguales si tienen la misma
magnitud y dirección sin importar la posición que
ocupen en el espacio.
En lo que sigue, se tratará solamente con la
definición de igualdad de vectores, es decir,
123
segunda
a que lleva

al concepto de vector libre. Según esto, en lo sucesivo -> — • dado un vector A=PQ, existirán infinitos vectores iguales
a éste, con puntos inicial y final diferentes, por
ejemplo todos los vectores que aparecen en la figura 2.7
se consideran iguales. y • (10,9)
(-4,7)
(-7,4) (-1,3)
(-4,0) (4,0)
Fig 2.7
Dado un vector B=PQ, sabiendo que existen infinitos vectores
iguales a él y que ocupan diferentes posiciones en el plano
(espacio) surgen en forma natural las siguientes preguntas:
Cuál será el punto final de un vector igual a if, cuyo punto
inicial esté en un punto R dado. ¿Cuál será el punto inicial
de un vector igual a ~B cuyo punto final está en un punto S
dado?.
Observe
las dos
que los vectores iguales a
preguntas siempre existen.
124
a los que
Para hallar
se refieren
los puntos

inicial y final pedidos es recomendable para mayor sencillez,
responder la primera pregunta con R=(0,0), es decir dado
. ¿Cuál será el punto final de un vector con punto
inicial en el origen, que sea igual a .
Y
Para ello sea P = ( x 0 , y 0 ) , Q = (xi,yi). El triángulo rectángulo
con vértices en P, Q y R y que tiene como catetos a yi-ya, y
X1 - X 0 (Fig 2.8), se puede trasladar al origen, de tal forma
que P coincida con (0,0) y que el cateto PR repose sobre el
eje positivo de las x, de manera que el vector E? que hace de
hipotenusa no cambie de magnitud ni de dirección. Este
triángulo trasladado cuyos vértices se llamarán o, R", Q'
tiene como hipotenusa un vector que es igual a ff con punto
inicial en (0,0) y con punto final en Q'=(xi-x0,yi-ya). Esta
traslación de vectores al origen, permite considerar un
vector no como determinado por dos puntos P = ( x 0 , y 0 ) ,
125

Q=(xi,yi) sino por un sólo punto (xi-xa, y í-yei) que
representa el punto final del vector, asumiendo que todos los
vectores tendrán su punto inicial en (0,0) (pues sino lo
tienen se trasladan). Con ello se puede establecer una
correspondencia biunívoca entre los vectores en el plano y
los puntos de R 2, pues a cada vector lf=Ptí con P = (xe,y0) y
Q=(xi,yi) se le puede hacer corresponder el punto
S = (xi-x0, yi-ye) y recíprocamente a cada punto (a,ÍS)<=R2, se le
puede hacer corresponder un único vector (f con punto inicial
en el origen y punto final en (a,B). De e'sto se concluye, que
es posible identificar los puntos de R 2 con los vectores en
el plano, lo cual nos permite manipular los vectores en forma
analítica como puntos, en lugar de magnitudes geométricamente
como flechas; por tanto el punto (a,£5) representa también el
vector l?=(a, 3), entendiendo con esta notación que "É tiene
punto inicial en (0,0) y punto final en (a,3). De esta
representación de vectores como puntos se obtiene que dos
vectores /í=(a,b), (í=(x,y) son iguales ** a = x y b = y.
En forma análoga se pueden trasladar vectores del espacio R3
al origen y por lo tanto, establecer una correspondencia
biunívoca entre éstos y los puntos de R 3.
126

Nota
Los puntos (0,0) ó (0,0,0) corresponden al llamado vector
cero o vector nulo en el plano o en el espacio
respectivamente y el cual se nota por C? y se caracteriza por
tener magnitud cero y no tener dirección.
Ejemplo 1
El vector lt=PQ con P=(2,3) y Q=(6,5) se puede representar
mediante el punto R=(6-2,5-3 ) = (4,2 ) (Fig 2.9)
R-<4,2)
• X
Fig 2.9
Ejemplo 2
Sea P=(2,5,4 ) ; Q=(3,-2,8) represente el vector f=P$:
a) Partiendo del origen.
Simplemente trasladar el vector al origen o sea que su
punto final será (3-2,-2-5,8-4)=(1,-7,4)
b) Partiendo del punto (-2,0,1). Cuál será su punto final?.
127

Sea (a,b,c) el punto final; como (-2,0,1) es el punto
inicial, y 2 = P$ trasladado al origen tiene punto final
(1,-7,4); entonces (1,-7,4 ) = (a + 2,b,c-1 ) , por tanto l=a+2,
-7=b; 4=c-l, es decir, a=-l, b = -7 y c = 5. Así su punto
final es (-1,-7,5).
c) Teniendo punto final en (1,-4,3) ¿Cuál será su punto
inicial?.
En forma análoga; si (a , í i,r) es el punto inicial entonces
(l,-7,4)=(l-a,-4-&,3-r), asi l=l-a, -7=-4~B, 4=3-r; es
decir; a=0, 3=3, r=-l; luego el punto inicial será
(0,3,-1) .
128

EJERCICIOS
1. Dado el vector A=PQ donde P=(1,0,1) y Q=(2,3,4) Hallar
vectores iguales a A que satisfagan:
a) Punto inicial en el origen.
b) Punto-final en el origen.
c) Punto inicial en (8,5,13).
d) Punto final en (3,4,2).
2. Si el vector ^=(4,5), representa la diagonal de un
rectángulo con dos de sus lados sobre los ejes coordenados
encontrar los vértices del mismo rectángulo si se traslada
de tal forma que uno de sus vértices coincide con el punto
(10,12).
3. Considere el triángulo formado por los vectores
siguientes: A=P3; t=CE*, donde P=(3,l), Q=(4,3),
C=(2,5), traslade el triángulo (sin rotarlo) de tal forma
que uno de sus vértices coincida con el origen. ¿Cuáles
serán los otros dos vértices del triángulo trasladado?.
129

2.5 PRODUCTO POR ESCALAR
Se trata de definir una operación que aumente o disminuya la
magnitud de un vector dado (a,b) sin variar su dirección o
variándola en el sentido opuesto. ¿Qué relación existe entre
las componentes x,y del nuevo vector (alargado o acortado) y
el vector dado (a,b)?. De la figura 2.10, por semejanza de
triángulos se deduce que:
Y
V * \
b
/
¡
a k Fig 2.10
y x v x -\-m— "tt para algún a, entonces y — p o r tanto D a D O . y=ab y x=aa o sea que (x,y)=(aa,ab). El valor de a determina
en que' proporción se alarga (para a>l) o se acorta (0<ct<l) el
vector conservando su dirección o en que" proporción se alarga
(ct<-l) o se acorta (-l<a<0) invirtiendo su direeción. (En
forma análoga en R 3 ) . Esto motiva la definición de una
operación entre un escalar (a) y un vector A=(a,b,c) llamada
Producto por escalar y definida por : aK-(aa,ab,ac).
130

Esta operación se utiliza para definir el concepto de
vectores paralelos, que geométricamente representa vectores
con la misma dirección o direcci nes opuestas así tengan
diferente magnitud. Puesto que al multiplicar por un escalar
un vector, e'ste se afecta en su magnitud dejando invariante
su dirección o invirtiendolo se tiene:
Definición —v —* Dos vectores A yB se dicen paralelos si A=aB para algún a<*0.
Ejemplo 1
Dado el vector A=(2,3), representar afi con:
a) a=2; b) a-\ c) a=-3 d) a=-%.
aí=a(2,3)=(2a,3a).
a) Si ct=2 ; a"£=( 2*2 , 2*3 ) = ( 4 , 6 ) (Fig 2.11a)
b) Si a=H; at=(%*2,%*3 ) = (1,3/2 ) (Fig 2.11b)
c) Si a=-3; at=(-3*2,-3*3)=(-6,-9) (Fig 2.11c)
d) Si « - • — ; al={ -y-*2 , ) = ( ~ , "2 ) (Fig 2.lid)
131

(2,3)
X
a)
(4,6)
(1,3/2)
b)
C)
Fig 2.11
Y á
ccX
(-4/3,-2) / d)
Ejemplo 2
Dados los puntos P=(2,3,4), Q=(4,5,-l) hallar el punto medio
del segmento de recta que une P con Q.
Inicialmente el vector B= es trasladado al origen quedando
representado por cf=(2,2,-5), el cual multiplicando por
produce el vector l5=(1,1,-5/2), que es el punto medio del
vector pero con punto inicial en el origen. Para hallar el
punto medio deseado se traslada el vector 1,1,-5/2) de tal
132

forma que su punto inicial coincida con P = (2,-3,4), siendo su
punto final (x,y,z), el punto medio buscado.
(1,1,-5/2)=(x-2,y-3,z-4) o sea l=x-2, l=y-3, -5/2=z-4; es
decir x=3, y=4 z=3/2. Así, el punto medio buscado es
(x,y,z)=(3,4,3/2) como se puede observar en la figura 2.12
z
Ejemplo 3
Los vectores "^=(6,9) y t = (2,3) son paralelos ya que l?=3lf y si
133

C=(l,4) y D=(l/5,4/5) también son paralelos ya que
mientras que 7? y cf no lo son .
Ejemplo 4
Dado A=(a,3), el vector -A, se define como el vector
(-l)i?=(-a, y se llama el opuesto de , (Fig 2.13).
Y
134

EJERCICIOS
1. Dado el vector A=(4,6) representar el vector A.A con :
a) A = 3.5 b) A=0.5 c) X=-5 d) A = -0.3.
2. Dados dos puntos P=(a,b,c), Q=(m,n,l); halle una fórmula
general para las componentes x,y,z del punto medio del
segmento de recta que une P con Q.
3. Dados los puntos P=(2,3,l), Q=(-2,4,3), hallar un punto
sobre el segmento de recta que une a P con Q y cuya
distancia a P sean las 3/5 partes de la distancia de P a 8
Q.
4. Los vectores A=(3,0,0), *B=(0,3,0), "£=(0,0,4) determinan un
paralelepípedo con uno de sus vértices en el origen.
Conservando este vértice hallar los demás vértices del
paralepípedo que se obtiene al reducir en el anterior los
lados a la mitad.
5. Dado P=(5,8,3) y Q=(l,2,-4) hallar un vector paralelo a
con dirección opuesta y con doble longitud.
135

6. Dados los vectores A*=(4 , 8,-3 ) , B=(6,12,-9/2), C=( 2, 3, 5 ) ,
^=(-4/3,-2,-20/6). ¿Cuáles de ellos son paralelos?.
136

2.6 SUMA DE VECTORES
Q
Fig 2.14
Si al cuerpo Q de la figura 2.14 se le aplica la fuerza Fi,
evidentemente el cuerpo se moverá en una dirección diferente
a la que resulta al aplicar en su lugar la fuerza F2 . Si se
aplican simultámeamente las dos fuerzas el cuerpo se
desplazará en una dirección diferente a las dos anteriores,
la pregunta es: ¿Existirá una fuerza F3 tal que al aplicarla
al cuerpo Q produzca el mismo efecto que al aplicar las dos
fuerzas Fi y F2 sumultáneamente? Empíricamente se puede
apreciar que en efecto tal fuerza existe y que ésta se puede
encontrar por medio de la llamada Ley del paralelogramo,
según la cual el vector F3 es la diagonal del paralelogramo
determinado por los vectores Fi y F 2 , considerando que Fi, F2 1 p
y F3 tienen un mismo punto inicial, (para lo cual lógicamente
se debe trasladar Fi ó F 2 ) . Para ilustrar ésto observe en la
137

figura 2.15 cual es el vector Fa, para los vectores Fi y F2
de la figura anterior.
A este vector F 3 se llama la resultante de los vectores Fi y
F2 ó la suma de Fi y F2 y se nota: Fa=Fi+F2.
Resulta natural la pregunta: ¿Qué relación existe entre las — » — • — >
componentes de Fi,F 2 y las componentes de Fa?. Para responder
este interrogante considere que Fí=(a,b), F2=(c,d) y observe

Puesto que PQ=OS, los triángulos con vértices 0, C, S y P, R,
Q son iguales por tanto 0C=PR, por consiguiente la coordenada
x de F3 es a+PR=a+0C=a+c y la coordenada y de Fa es
b+RQ=b+CS=b+d, o sea que Fa=(a+c,b+d). Esto nos permite sumar
vectores en R 2 en forma analítica, es decir, sin su
representación geométrica. Análogamente se suman dos vectores
en l 3, sumando componente a componente.
Ejenplo
Dado 7Í=(3,2), hallar el vector geométrica y
analíticamente. (3,7)
Fig 2.17 * 5
a) Geométricamente
b) Analíticamente:
= ( 3,3) + (2,5) = (5,7) .
Ejemplo 2
Sea "£=(4,0,0), lf=(0,6,0), "(f=(0,0,2), hallar el vector que
representa una diagonal del paralepipedo determinado por
estos tres vectores:
139

El vector que representa una diagonal es tí, como se observa
en la figura 2.18 y se puede apreciar también que donde
I? es el vector que forma una diagonal de la base, la cuál es
igual a es decir = (4 , 0 , 0 ) + (0 , 6 ,0 ) = (4 , 6 ,0 ) , por lo
tanto 1)=C+E = (0,0, 2 ) + (4, 6 ,0) = (4 , 6, 2) . Puesto que como se notó
anteriormente, el vector (-l)B, se representa por -B,
entonces se define la diferencia de los vectores A y f en
este orden, y se nota a la suma del vector A y el vector es decir, M=(X«-(-"6) ) = í+<-1 .
Y
140

representa por una fleóha que va desde el punto final de B
hasta el punto final de una vez se han colocado y con
punto inicial común.
Ejemplo 1
Dados los vectores lt=(3,4,5) y (4,-3,6) hallar el vector
que representa el tercer lado del triángulo determinado por
estos dos vectores. ,
X Fig 2.20
El vector buscado puede ser t-t ó t-t, según la
interpretación geométrica que se dió a la diferencia;
M = < 3 , 4 , 5 , )-(4,-3,5)=(-l,7,0)
£-£=(4,-3,5)-(3,4,5)=(l,-7,0)
Ejemplo 2
Observe que dado el vector P(?, trasladar éste vector al — *
origen, equivale a hacer la diferencia entre el vector Q y el
vector"? como se puede observar en la figura 2.21 141

Y
Q
Q-P Fig 2.21
El producto por escalar y la suma de vectores satisfacen
algunas propiedades análogas a las propiedades algebraicas de
los números Reales. Las siguientes ocho propiedades serán
esenciales para una generalización de los vectores, como se
verá en un curso posterior de algebra lineal.
Sean t, 1 y "í vectores y a y B números Reales, entonces:
1. Propiedad conmutativa de la suma de vectores:
2. Propiedad asociativa de la suma de vectores:
3. Propiedad modulativa de la suma de vectores:
4. Propiedad invertiva de la suma de vectores:
142

5. Propiedad asociativa del producto escalar:
a(BÍ) = (ct3)"£=£(o7?).
6. Propiedad distributiva del producto por escalar respecto a
la suma de escalares:
7. Propiedad distributiva del producto escalar, respecto a la
suma de vectores:
a (7Í+T£) =a/?+alf.
8. Propiedad modulativa del producto por escalar:
1 *£="£.
Las demostraciones de estas propiedades se hacen con la
representación analítica de los vectores, y se basan en las
propiedades de los números Reales. Para ilustrarlo, se •
demostrarán las propiedades 2 y 6:
2. Sea t:(xi (X2,X3), Br(yi,y 2 )y 3) ) ^ r ( z l i Z 2 i Z 3 ) , Enton
(A+f)+?=((xi,X2,x3)+(yi,y 2,y3)) +( z l ) Z 2 í Z 3)-
143
ees

= (Xl + y1,X2 + Y2,X3 + Y3)+(Zl, Z2,Z3 )-
= (xi+yi + zi,X2+Y2+Z2,X3+ya+Z3 )-
= (xi,x2,x3) + (yi+zi,y2+Z2,y3+Z3 ) =
= (Xl,X2,X3)+((yi,y2,y3) + (Zl, Z2 , Z3 ) )=X+(Tf+<?) .
6. (a+ß)X=((a+ß)xi,(a+ß)x2,(a+ß)x3)=
(axi+ßxi,ax2+ßx2,ax3+ßx3)=
=((axi,ax2,ax3>+(ßxi,ßx2,ßx3)=
= a ( X ! , X 2 , X 3 ) + ß ( X ! , X 2 , X 3 ) = o K + $ l £
144

EJERCICIOS
1. Sea P=(3,4,5), Q=(8,5,10), R=(l,l,l), S=(2,0,4) y~A="P$,
t-R^, 1?=r3; encontrar:
a) A b )
Fig 2.22
Considere los lados del cuadrilátero de la figura 2.22, como
vectores (orientados a su gusto) y halle geométricamente la
suma y la diferencia de sus lados dos a dos (todas las
posibilidades).
3. Para el sistema de fuerzas que se muestra en la figura — * •
2.23 hallar gráficamente la fuerza resultante F aplicada
en el punto (8,4) (es decir con punto inicial en (8,4))
145

(4,5)
I" (-4,3)
F, (4,4l fe,4)
"» X
(4(4)
\ (6,-6)
Fig 2.23
4. Construir un paralelepípedo tal que ninguna de sus caras
esté sobre los planos coordenados y halle cada vector que
representa sus diagonales, como suma o diferencia de
vectores que representen sus lados.
5. Dados tres vectores (luego 4,5,. .,etc) halle una forma
geométrica de sumarlos. Indicación: coloque los vectores
consecutivamente de tal forma que el punto final del uno
coincida con el punto inicial de otro
146

2.7 HORMA DE VECTORES
Desde que se introdujo el concepto de vector se ha trabajado
con el concepto de magnitud de un vector, más sin embargo
para efectos prácticos no se ha establecido aún como
calcularla. Para ésto inicialmente es necesario observar que
esta magnitud no cambia si se traslada el vector al origen,
por tanto basta con calcular la magnitud de un vector
7t=(a,b,c) y ésta corresponde a la longitud del segmento de
recta que va de su punto inicial (0,0,0) a su punto final
(a,b,c), es decir, es la distancia entre estos dos puntos o
sea :
^(a-0)2+(Í>-0)2+(c-0)2«=v'a2+Í>2+C2 • A e s t e n ú m e r o s e l e conoce como la norma del vector A y se nota por por tanto:
Ejempio
Hallar:
a) La norma de P = (l,2), Q=(2,4). a
A=Q-P=(2,4)-(1,2), luego |pt||
b) La norma de "$=(1,1,0).
147

Las siguientes propiedades de la norma
estudio de los vectores. La demostración
resulta inmediata de su definición.
son básicas en
de las dos prime
el
ras
1. ||t||>0
2. ||*||=0 t=0
3.
En efecto
||A*|| = | | l (a ,b,c)|| = | | ( j U , A b , A c ) | | = V (Aa) a+ (X i> ) 2 + (Xc ) 2
= WaKbí+c*. | A | U\\
4. <||* || + ||"á|j (Desigualdad triangular). La demostración
analítica de esta propiedad se dejará para más adelante.
Geométricamente como se puede apreciar en la figura 2.24,
esta propiedad se deduce del hecho de que la suma de las
longitudes de dos lados de un triángulo siempre es mayor o
igual que el tercero. Y
148

En las aplicaciones de los vectores, frecuentemente es
necesario considerar vectores de norma 1, los que comunmente
se llaman vectores unitarios, como también es usual el
normalizar un vector, lo cual consiste en hallar un vector
unitario que tenga la misma dirección que un vector dado B*0;
vector, que se consigue multiplicando el vector B, por el , 1 t escalar jj jj , ya que si 17--p^-
entonces j|Tf||= 11 II = || | • 1111 t '1 .
Ejemplo 1 Si B=(3,4,0), hallar un vector U unitario, que
te.nga la misma dirección que if. Cómo "{£=(3,4,0),
|| +16 +0 «V25-5 así que, Tf=> ( , , o) es el vector
pedido, ya que || || = 1 y tiene la misma dirección que lf. Entre
los vectores unitarios en el espacio hay tres; í=(l,0,0), A A
]=(0,1,0) y k=(0,0,l) llamados vectores coordenados unitarios
(Fig 2.25) que tienen la característica, de que dado
cualquier vector en el espacio, éste se puede expresar como
suma de esos tres vectores multiplicados por determinados — ^ escalares (lo que se conoce como representar el-vector A como
A A _*• combinación lineal de los vectores í,J ,k). Así, si A=(a,b,c) ~f A A
observe que A=a(1,0,0)+b(0,1,0)+c(0,0,1 ) = aí+b]+ck; es decir A A los vectores i,],k generan el espacio R 3.
149

z
Fig 2.25
Esta representación introduce una nueva forma de notar los
vectores, la cual es de uso frecuente especialmente en textos
de aplicación. Así la expresión 4i-2]+14k identifica al
vector (4,-2,14).
En forma análoga para R 2 se definen los vectores unitarios
i=(l,0), J=(0,1), los cuales generan a R 2, pues cualquier
pareja (a,0) se puede expresar como:
<a,&)=a<l,0)+B(0,l)=aS+B].
150

EJERCICIOS
1. En el ejercicio 3 de la sección anterior, calcular la
norma del vector de fuerza F resultante y calcule la norma
de cada uno de los vectores componentes. ¿Es
2. Considere al paralelepípedo determinado por los vectores
#=(2,0,0) = (0,4,0) <?= (2,5,6) Hallar todos los vértices
del paralelepípedo* determinado por los vectores Tt, it, y
pero normalizados.
3. Dado los vectores T=( 1, 2 , 3 ) , "£=(4,2,2) y (T=(0,1, 2, ) .
¿Generan estos vectores a R 3? . Indicación, considere el
vector (a,b,c) y encuentre valores a,p,r (que dependen de
a,b y c) tales que ( a ,b , c )=a/t+$l?+r<?.
151

2 . 8 PRODUCTO I N T E R N O (PRODUCTO E S C A L A R O PRODUCTO PUNTO)
Suponga que los vectores A=(ai,a2,a3 ) y T?= (bi,b2,ba) son
perpendiculares, es decir, forman un ángulo recto entre
ellos, la pregunta que se pretende responder es: ¿Cómo se
caracteriza analíticamente este hecho?. Para ello al
considerar la figura 2.26
V
Por ser 1? y perpendiculares, estos dos vectores con el —¥
vector A-B determinan un triángulo rectángulo, con catetos
||lt|| , ||15|| y con hipotenusa |pt-"8|| y por el teorema de Pitágoras
se tiene que : 2+1|1?|| 2 = |pf-T?||2 y pasando a componentes los
vectores se tiene ai 2+a2 2+bi 2+b2 2=( ai-bi )2-t ( a2-b2 ) 2 , es decir
ai 2+a2 2+bi 2+b2 2-ai 2+2aibi-bi 2-a2 2^a 2b2-b 22=0 y de aquí se
obtiene que: aibi+a2b2=0. Al plantear este mismo problema
pero en R3, con un argumento análogo, se concluye que si 152

*=(ai,a2,aa) y B=(bi,b2.ba) son perpendicualres entre sí
entonces: aibi+a2b2+aab3=0. Expresiones idénticas a e'stas,
surgen necesariamente cuando se pretende resolver
analíticamente problemas relacionados con el cálculo del
ángulo entre dos vectores o con la proyección de un vector
sobre otro (Como se verá más adelante) y esto motiva
suficientemente el que se les asigne un nombre y notación
especial:
Definición
Sean /í=( ai, a2, as ) y I^=(bi,b2,b3). El producto interno
(llamado también producto punto o producto escalar de los — » — » vectores A y B), notado por A.B se define como el número Real
— • — *
aibi+a2b2+a3b3, es decir A.B=aibi+a2b2+a3b3.
Ejemplo
Si *=(1,0,0) y "$=(1,2,2) entonces
"í.!f=( 1,0,0). (1,2, 2) = 1*1+0*2+0*2 = 1.
Este producto (que se define en forma análoga en R 2 ) está
caracterizado por las propiedades siguientes:
1. t.~k>0.
Demostración (Ejercicio)
153